
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
APUNTE: EJERCICIOS RESUELTOS DE CÁLCULO
CÁTEDRAS: CÁLCULO II, MATEMÁTICAS III
2016.
PROFESOR: CLAUDIO GAETE PERALTA

2
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
APUNTE: EJERCICIOS RESUELTOS DE CÁLCULO
CÁTEDRAS: CÁLCULO II, MATEMÁTICAS III
2016.
PROFESOR: CLAUDIO GAETE PERALTA
Licenciado en Matemáticas, Magíster en Matemáticas,
Magíster en Didáctica de la Matemática. En la actualidad, está
doctorándose en Didáctica de la Matemática. Pontificia
Universidad Católica de Valparaíso, Chile.
Actualmente es profesor de diferentes cursos de Matemáticas
en la Facultad de Ingeniería de la Universidad Bernardo
O´Higgins. Además, se desempeña como Coordinador de
Cálculo dentro del Departamento de Matemáticas y Física.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
INDICE
Presentación .................................................................................................................................................. 4
1. Integración ................................................................................................................................................ 5
1.1 Técnicas de integración.............................................................................................................. 5
1.2 Cálculo de áreas ....................................................................................................................... 20
1.3 Ejercicios propuestos ............................................................................................................... 30
2. Funciones de varias variables ......................................................................................................... 32
2.1 Modelación de funciones ......................................................................................................... 32
2.2 Derivadas parciales .................................................................................................................. 34
2.3 Ejercicios propuestos ............................................................................................................... 41
3. Funciones con valores vectoriales ................................................................................................. 42
4. Máximos y mínimos ............................................................................................................................. 45
4.1 Criterio del Hessiano ................................................................................................................ 46
4.2 Multiplicadores de Lagrange .................................................................................................... 50
4.3 Ejercicios propuestos ............................................................................................................... 58
5. Conclusiones ........................................................................................................................................... 60
6. Bibliografía de apoyo .......................................................................................................................... 60

4
Presentación
Estos apuntes fueron diseñados con el fin de complementar el aprendizaje matemático
junto con lo visto en clases. Se presentan diversos ejercicios resueltos y propuestos,
principalmente para carreras de Ingeniería.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
1. Integración
1.1 Técnicas de integración
1. (Tasa de desempleo) Durante una crisis económica reciente, el porcentaje 𝑃 de
desempleados cumple con
𝑃′(𝑡) =0,4𝑒−0,1𝑡
(1 + 𝑒−0,1𝑡)2
donde 𝑡 es el tiempo en meses. Dado que en 𝑡 = 0 había 4% de desempleados, ¿qué
porcentaje estaba desempleado:
¿10 meses después?
¿20 meses después?
Solución: Tenemos
𝑃(𝑡) = ∫0,4𝑒−0,1𝑡
(1 + 𝑒−0,1𝑡)2𝑑𝑡 = 0,4∫
𝑒−0,1𝑡
(1 + 𝑒−0,1𝑡)2𝑑𝑡
Sea 𝑢 = −0,1𝑡, luego 𝑑𝑢 = −0,1𝑑𝑡 → −10𝑑𝑢 = 𝑑𝑡 .
De esta forma, tenemos que

6
0,4∫𝑒−0,1𝑡
(1 + 𝑒−0,1𝑡)2𝑑𝑡 = −4∫
𝑒𝑢
(1 + 𝑒𝑢)2𝑑𝑢
Ahora, para esta segunda integral, sea
𝑦 = 1 + 𝑒𝑢 → 𝑒𝑢𝑑𝑢 = 𝑑𝑦
Así,
−4∫𝑒𝑢
(1 + 𝑒𝑢)2𝑑𝑢 =− 4∫
1
(𝑦)2𝑑𝑦 =
4
𝑦=
4
1 + 𝑒𝑢=
4
1 + 𝑒−0,1𝑡+ 𝑘
Por lo tanto
𝑃(𝑡) =4
1 + 𝑒−0,1𝑡+ 𝑘
Como 𝑃(0) = 4, se tiene que
4 =4
1 + 𝑒−0,1∙0+ 𝑘
4 =4
1 + 1+ 𝑘
2 = 𝑘
Por lo tanto
𝑃(𝑡) =4
1 + 𝑒−0,1𝑡+ 2
Por lo que 𝑃(10) =4
1+𝑒−1+ 2 ≈ 5% y 𝑃(20) =
4
1+𝑒−2+ 2 ≈ 5,5%

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
∎
2. La función de Utilidad 𝑈(𝑥) de una empresa, cumple con
𝑈´(𝑥) = 5 − 0,002𝑥
Y la empresa obtiene una utilidad de US $310 al vender 100 unidades (𝑥 indica el número
de unidades vendidas) ¿Cuál es la Función de utilidad de la empresa?
Solución: Integrando, tenemos que
𝑈(𝑥) = ∫(5 − 0,002𝑥) 𝑑𝑥 = 5𝑥 − 0,002𝑥2
2+ 𝑘
= 5𝑥 − 0,001𝑥2 + 𝑘
Para determinar 𝑘, notemos que la empresa obtiene una utilidad de US $310 al vender
100 unidades, luego
310 = 5 ∙ 100 − 0,001(100)2 + 𝑘
−470 = −0,001 ∙ 10000 + 𝑘
−470 = −0,001 ∙ 10000 + 𝑘

8
−470 = −10 + 𝑘
−460 = 𝑘
De esta manera, la función de utilidad es
𝑈(𝑥) = 5𝑥 − 0,001𝑥2 − 460
∎
3. El ingreso 𝐼 (en miles de dólares) de una empresa está dado por
𝐼′(𝑥) = 15 − 0,01𝑥
Donde 𝑥 representa la cantidad de unidades vendidas
a) Determine la función de ingreso, sabiendo que al vender 50 unidades, se obtiene un
ingreso de 200 dólares.
b) Encuentre el ingreso obtenido al vender 1000 unidades.
Solución:
a) Tenemos que
𝐼(𝑥) = ∫(15 − 0,01𝑥) 𝑑𝑥 = 15𝑥 − 0,01𝑥2
2+ 𝑘, 𝑘 ∈ ℝ
= 15𝑥 − 0,005𝑥2 + 𝑘, 𝑘 ∈ ℝ
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Como al vender 50 unidades, se obtiene un ingreso de 200 dólares (0,2 miles de dólares),
tenemos que
0,2 = 15 ∙ 50 − 0,005 ∙ (50)2 + 𝑘
0,2 − 750+ 12,5 = 𝑘
−737,3 = 𝑘
Por lo que la función de ingreso será
𝐼(𝑥) = 15𝑥 − 0,005𝑥2 − 737,3
∎
b) 𝐼(1000) = 15000 − 5000 − 737,3 = 9262,7 miles de dólares. Es decir, 9.262.700
dólares.
4. Resuelva la siguiente integral
∫(√𝑥 + 5 +𝑥
2√𝑥 + 5)𝑑𝑥
Solución:
Tenemos que
∫(√𝑥 + 5 +𝑥
2√𝑥 + 5)𝑑𝑥 = ∫√𝑥 + 5𝑑𝑥
⏟ 𝐼1
+1
2∫
𝑥
√𝑥 + 5𝑑𝑥
⏟ 𝐼2
Calcularemos cada integral por separado. Para la primera integral, sea

10
𝑢 = 𝑥 + 5 → 𝑑𝑢 = 𝑑𝑥
𝐼1 = ∫√𝑥 + 5𝑑𝑥 = ∫√𝑢𝑑𝑢 =2
3𝑢32 =
2
3(𝑥 + 5)
32
Para la segunda integral, sea
𝑢 = 𝑥 + 5 → 𝑑𝑢 = 𝑑𝑥
𝐼2 = ∫𝑥
√𝑥 + 5𝑑𝑥 = ∫
𝑢 − 5
√𝑢𝑑𝑢 = ∫
𝑢
√𝑢𝑑𝑢 − ∫
5
√𝑢𝑑𝑢
= ∫𝑢32𝑑𝑢 − 5∫√𝑢𝑑𝑢 =
2
5𝑢52 −
10
3𝑢32
=2
5(𝑥 + 5)
52 −
10
3(𝑥 + 5)
32
Así,
𝑇(𝑥) = 𝐼1 +1
2𝐼2 =
=2
3(𝑥 + 5)
32 +
1
2[2
5(𝑥 + 5)
52 −
10
3(𝑥 + 5)
32]
=2
3(𝑥 + 5)
32 +
1
5(𝑥 + 5)
52 −
5
3(𝑥 + 5)
32 + 𝑘, 𝑘 ∈ ℝ
∎

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
5. Encuentre el valor de la siguiente integral impropia
∫1
(2𝑥 + 3)4𝑑𝑥
∞
−1
Solución: En primer lugar, realizando la sustitución
𝑢 = 2𝑥 + 3 → 𝑑𝑢 = 2𝑑𝑥 →𝑑𝑢
2= 𝑑𝑥.
Tenemos que
∫1
(2𝑥 + 3)4𝑑𝑥 =
1
2∫1
𝑢4𝑑𝑢 =
1
2
𝑢−3
−3= −
1
6𝑢3= −
1
6(2𝑥 + 3)3
Por lo que
∫1
(2𝑥 + 3)4𝑑𝑥
∞
−1
= lim𝑛→∞
∫1
(2𝑥 + 3)4𝑑𝑥
𝑛
−1
= lim𝑛→∞
−1
6(2𝑥 + 3)3−1
𝑛
= lim𝑛→∞
[−1
6(2𝑛 + 3)3+1
6] =
1
6

12
6. Encuentre el valor de la siguiente integral impropia
∫𝑥2
(𝑥3 + 2)2𝑑𝑥
∞
1
Solución: Sea
𝑢 = 𝑥3 + 2 → 𝑑𝑢 = 3𝑥2𝑑𝑥 →𝑑𝑢
3= 𝑥2𝑑𝑥
De esta forma,
∫𝑥2
(𝑥3 + 2)2𝑑𝑥 = ∫
𝑑𝑢3𝑢2
=1
3∫𝑢−2 𝑑𝑢
= −1
3𝑢= −
1
3(𝑥3 + 2)
Por lo tanto,
∫𝑥2
(𝑥3 + 2)2𝑑𝑥
∞
1
= lim𝑛→∞
∫𝑥2
(𝑥3 + 2)2𝑑𝑥
𝑛
1
= lim𝑛→∞
[−1
3(𝑥3 + 2)]1
𝑛
= lim𝑛→∞
(−1
3(𝑛3 + 2)+1
9) =
1
9
∎
7. Encuentre el valor de la siguiente integral impropia
∫ 𝑥𝑒−2𝑥𝑑𝑥
∞
0

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Solución: Sea
𝑢 = 𝑥 → 𝑑𝑢 = 𝑑𝑥
𝑑𝑣 = 𝑒−2𝑥𝑑𝑥 → 𝑣 = −1
2𝑒−2𝑥 (Usando sustitución)
Por lo tanto, utilizando integración por partes, tenemos
∫𝑥𝑒−2𝑥𝑑𝑥 = 𝑥 ∙ −1
2𝑒−2𝑥 −∫−
1
2𝑒−2𝑥 𝑑𝑥
= −1
2𝑥𝑒−2𝑥 +
1
2∫𝑒−2𝑥 𝑑𝑥 = −
1
2𝑥𝑒−2𝑥 +
1
2(−1
2𝑒−2𝑥)
= −1
2𝑥𝑒−2𝑥 −
1
4𝑒−2𝑥
De esta forma,
∫ 𝑥𝑒−2𝑥𝑑𝑥
∞
0
= lim𝑛→∞
∫𝑥𝑒−2𝑥𝑑𝑥
𝑛
0
= lim𝑛→∞
[−1
2𝑥𝑒−2𝑥 −
1
4𝑒−2𝑥]
0
𝑛
= lim𝑛→∞
[−1
2𝑛𝑒−2𝑛 −
1
4𝑒−2𝑛 +
1
4] =
1
4
∎

14
8. Resuelva la siguiente integral impropia
∫ 𝑥𝑒−𝑥2
∞
0
𝑑𝑥
Solución: Sea 𝑢 = −𝑥2 → −𝑑𝑢
2= 𝑥𝑑𝑥. De esta forma,
∫𝑥𝑒−𝑥2𝑑𝑥 = −
1
2∫𝑒𝑢 𝑑𝑢 = −
1
2𝑒𝑢 = −
1
2𝑒−𝑥
2
Por lo que
∫ 𝑥𝑒−𝑥2
∞
0
𝑑𝑥 = lim𝑛→∞
[−1
2𝑒−𝑛
2+1
2] =
1
2
∎
9. En un experimento sicológico, se encontró que la cantidad de alumnos que requieren
más de 𝑡 minutos para realizar una tarea, viene dado por
𝐶(𝑡) = ∫ 0,07𝑒−0,07𝑥𝑑𝑥
∞
𝑡
a. Hallar la cantidad de participantes que requieren más de 5 minutos para terminar la
tarea
b. ¿Qué cantidad de alumnos requiere entre 10 y 15 minutos para terminar la tarea?
Solución:
a.
𝐶(5) = ∫ 0,07𝑒−0,07𝑥𝑑𝑥
∞
5
Sea 𝑢 = −0,07𝑥 → 𝑑𝑢 = −0.07𝑑𝑥. Por lo tanto,

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
∫0,07𝑒−0,07𝑥𝑑𝑥 = −∫𝑒𝑢 𝑑𝑢 = −𝑒𝑢 = −𝑒−0,07𝑥
Luego,
∫ 0,07𝑒−0,07𝑥𝑑𝑥
∞
5
= lim𝑛→∞
∫0,07𝑒−0,07𝑥𝑑𝑥
𝑛
5
= lim𝑛→∞
[−𝑒−0,07𝑥]5𝑛
= lim𝑛→∞
(−𝑒−0,07𝑛 + 𝑒−0,07∙5) = 𝑒−0,07∙5 = 𝑒−0,35~0,704
b. Realizar la resta 𝐶(10) − 𝐶(15)
∎
10. Encuentre la siguiente integral
∫𝑥 cos 𝑥 𝑑𝑥
Solución: Sea
𝑢 = 𝑥 → 𝑑𝑢 = 𝑑𝑥
𝑑𝑣 = cos 𝑥 𝑑𝑥 → 𝑣 = sin 𝑥
Haciendo uso de integración por partes, tenemos que
∫𝑥 cos 𝑥 𝑑𝑥 = 𝑥 sin 𝑥 −∫ sin 𝑥 𝑑𝑥 = 𝑥 sin 𝑥 + cos 𝑥 + 𝑘, 𝑘 ∈ ℝ

16
11. Encuentre la siguiente integral
∫𝑥√𝑥 + 1𝑑𝑥
Solución:
Sea 𝑢 = 𝑥 + 1 → 𝑑𝑢 = 𝑑𝑥. De esta forma,
∫𝑥√𝑥 + 1𝑑𝑥 = ∫(𝑢 − 1)√𝑢 𝑑𝑢 = ∫𝑢 √𝑢 𝑑𝑢 −∫√𝑢 𝑑𝑢
∫𝑢32 𝑑𝑢 −
𝑢32
32
=𝑢52
52
−2
3𝑢32 =
2
5𝑢52 −
2
3𝑢32
Por lo tanto,
∫𝑥√𝑥 + 1𝑑𝑥 =2
5(𝑥 + 1)
52 −
2
3(𝑥 + 1)
32 + 𝑘, 𝑘 ∈ ℝ
12. Encuentre la siguiente integral
∫2𝑥 + 1
𝑥2 + 𝑥 − 6𝑑𝑥
Solución:
Sea 𝑢 = 𝑥2 + 𝑥 − 6 → 𝑑𝑢 = (2𝑥 + 1)𝑑𝑥. De esta forma,
∫2𝑥 + 1
𝑥2 + 𝑥 − 6𝑑𝑥 = ∫
𝑑𝑢
𝑢= 𝑙𝑛|𝑢| = 𝑙𝑛|𝑥2 + 𝑥 − 6| + 𝑘, 𝑘 ∈ ℝ
∎

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
13. Encuentre la siguiente integral
∫𝑥2 + 1
𝑥 − 1𝑑𝑥
Solución: Realizando división sintética, tenemos que
𝑥2 + 1 = (𝑥 − 1)(𝑥 + 1) + 2⏟RESTO
Por lo tanto,
∫𝑥2 + 1
𝑥 − 1𝑑𝑥 =∫
(𝑥 − 1)(𝑥 + 1) + 2
𝑥 − 1𝑑𝑥 = ∫(𝑥 + 1)𝑑𝑥 + 2∫
1
𝑥 − 1𝑑𝑥
=𝑥2
2+ 𝑥 + 2 ln|𝑥 − 1| + 𝑘, 𝑘 ∈ ℝ
14. Encuentre las siguientes integrales
a. ∫𝑥2𝑒𝑥𝑑𝑥
b. ∫𝑥2 cos 3𝑥 𝑑𝑥
Solución: Las dos integrales se resuelven aplicando el método de integración por partes,
dos veces:
a. Sea
𝐼 = ∫𝑥2𝑒𝑥𝑑𝑥

18
𝑢 = 𝑥2 → 𝑑𝑢 = 2𝑥𝑑𝑥
𝑑𝑣 = 𝑒𝑥𝑑𝑥 → 𝑣 = 𝑒𝑥
Luego, aplicando integración por partes, tenemos
𝐼 = ∫𝑥2𝑒𝑥𝑑𝑥 = 𝑥2𝑒𝑥 − 2∫𝑥𝑒𝑥𝑑𝑥⏟ (𝐼1)
(*)
Tenemos que 𝐼1 puede ser resuelta por medio de integración por partes:
𝑢 = 𝑥 → 𝑑𝑢 = 𝑑𝑥
𝑑𝑣 = 𝑒𝑥𝑑𝑥 → 𝑣 = 𝑒𝑥
𝐼1 = 𝑥𝑒𝑥 − ∫𝑒𝑥𝑑𝑥 = 𝑥𝑒𝑥 − 𝑒𝑥
Reemplazando en (*), tenemos
𝐼 = ∫𝑥2𝑒𝑥𝑑𝑥 = 𝑥2𝑒𝑥 − 2∫𝑥𝑒𝑥𝑑𝑥
= 𝑥2𝑒𝑥 − 2(𝑥𝑒𝑥 − 𝑒𝑥) = 𝑥2𝑒𝑥 − 2𝑥𝑒𝑥 + 2𝑒𝑥 + 𝑘, 𝑘 ∈ ℝ
∎
b. Sea
𝐼 = ∫𝑥2 cos 3𝑥 𝑑𝑥
𝑢 = 𝑥2 → 𝑑𝑢 = 2𝑥𝑑𝑥

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
𝑑𝑣 = cos 3𝑥 𝑑𝑥 → 𝑣 =1
3sin 3𝑥 (Usando sustitución)
De esta forma, aplicando integración por partes, tenemos
𝐼 = ∫𝑥2 cos 3𝑥 𝑑𝑥 =1
3𝑥2sin 3𝑥 −∫
1
3sin(3𝑥)2𝑥𝑑𝑥
=1
3𝑥2sin 3𝑥 −
2
3∫𝑥sin(3𝑥)𝑑𝑥⏟
𝐼1
(*)
Tenemos que 𝐼1 puede ser resuelta por medio de integración por partes:
𝑢 = 𝑥 → 𝑑𝑢 = 𝑑𝑥
𝑑𝑣 = sin(3𝑥)𝑑𝑥 → 𝑣 = −1
3cos 3𝑥
𝐼1 = −1
3𝑥 cos 3𝑥 +∫
1
3cos 3𝑥 𝑑𝑥 = −
1
3𝑥 cos 3𝑥 +
1
9sin 3𝑥
Reemplazando en (*), tenemos
𝐼 =1
3𝑥2sin 3𝑥 −
2
3(−1
3𝑥 cos 3𝑥 +
1
9sin 3𝑥)
=1
3𝑥2sin 3𝑥 +
2
9𝑥 cos 3𝑥 −
2
27sin 3𝑥 + 𝑘, 𝑘 ∈ ℝ
20
∎
1.2 Cálculo de áreas
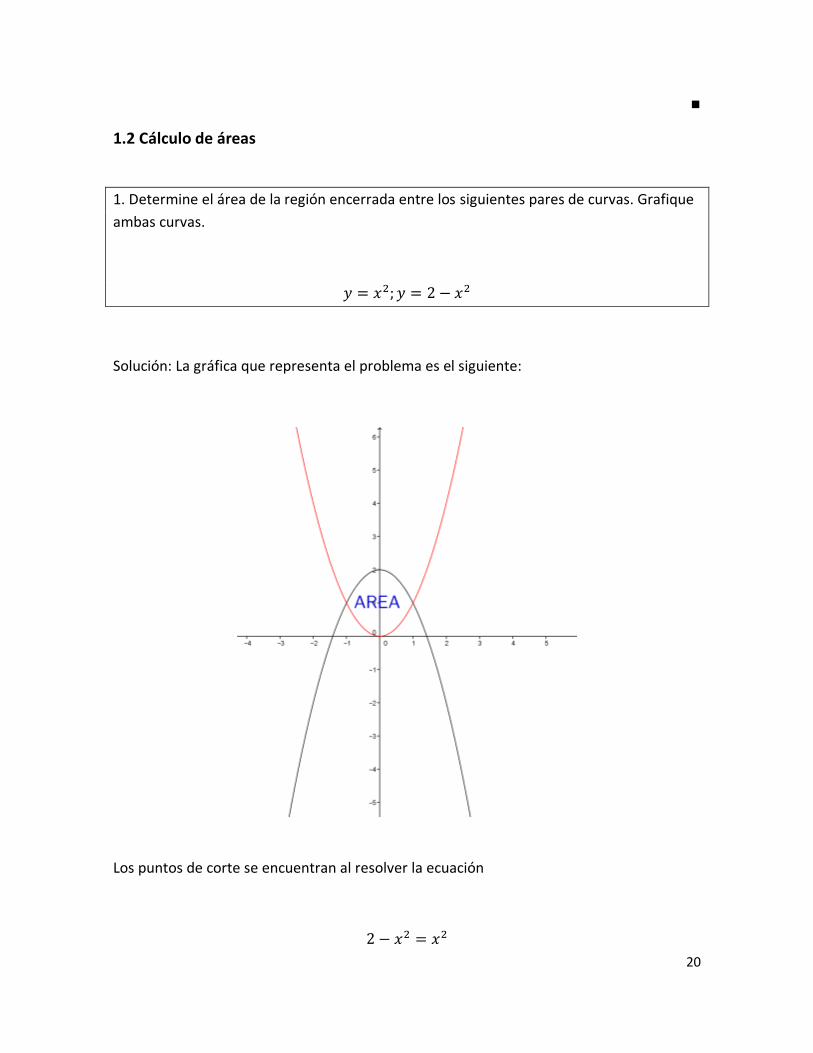
1. Determine el área de la región encerrada entre los siguientes pares de curvas. Grafique
ambas curvas.
𝑦 = 𝑥2; 𝑦 = 2 − 𝑥2
Solución: La gráfica que representa el problema es el siguiente:
Los puntos de corte se encuentran al resolver la ecuación
2 − 𝑥2 = 𝑥2

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
1 = 𝑥−+
El área pedida se obtiene restando:
𝐴 = ∫2 − 𝑥2𝑑𝑥
1
−1
− ∫𝑥2𝑑𝑥
1
−1
=8
3𝑢2
2. Hallar el área limitada por la recta 𝑥 + 𝑦 = 10, el eje OX y las ordenadas de 𝑥 = 2 y
𝑥 = 8
𝐴 = ∫(10 − 𝑥)𝑑𝑥
8
2
= [10𝑥 −𝑥2
2]2
8
= 30𝑢2
∎

22
3. Calcular el área del recinto limitado por la curva 𝑦 = 9 − 𝑥2 y el eje OX.
Solución: En primer lugar hallamos los puntos de corte con el eje OX para representar la
curva y conocer los límites de integración.
0 = 9 − 𝑥2
𝑥 = 3−+
Como la parábola es simétrica respecto al eje OY, el área será igual al doble del área
comprendida entre 𝑥 = 0 y 𝑥 = 3.
𝐴 = ∫(9 − 𝑥2)𝑑𝑥
3
−3
= 2∫(9 − 𝑥2)𝑑𝑥
3
0
= 2 [9𝑥 −𝑥3
3]0
3
= 36𝑢2
∎
4. Calcular el área del triángulo de vértices 𝐴(3, 0), 𝐵(6, 3), 𝐶(8, 0).
Solución:

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Ecuación de la recta que pasa por AB. La pendiente se calcula mediante la fórmula:
𝑚 =3 − 0
6 − 3= 1
De esta forma, la ecuación de la recta es
𝑦 − 𝑦1 = 𝑚(𝑥 − 𝑥1)
𝑦 − 0 = 𝑥 − 3
𝑦 = 𝑥 − 3

24
Análogamente, la ecuación de la recta que pasa por 𝐵𝐶: es
𝑦 = −3
2𝑥 + 12
𝐴 = ∫(𝑥 − 3)𝑑𝑥
6
3
+∫(−3
2𝑥 + 12)𝑑𝑥
8
6
[𝑥2
2− 3𝑥]
3
6
+ [−3
4𝑥2 + 12𝑥]
6
8
=
= (18 − 18) − (9
2− 9) + (−48+ 96) − (−27 + 72)
=15
2𝑢2
∎
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
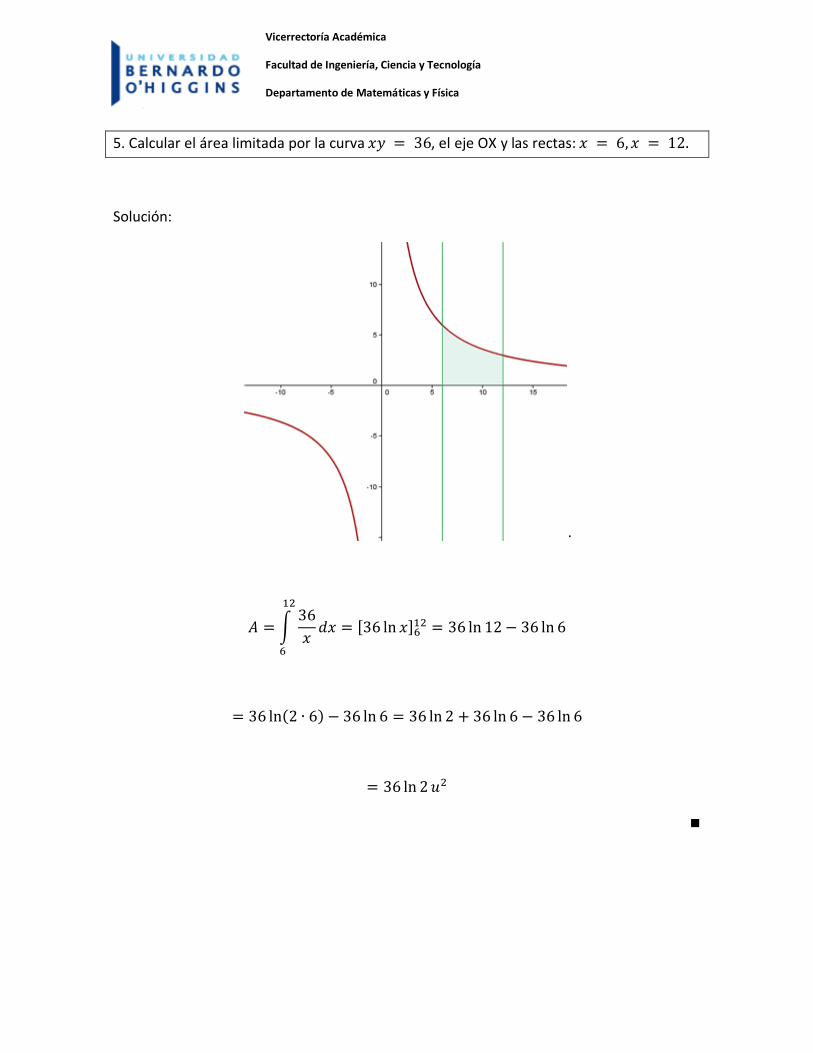
5. Calcular el área limitada por la curva 𝑥𝑦 = 36, el eje OX y las rectas: 𝑥 = 6, 𝑥 = 12.
Solución:
·
𝐴 = ∫36
𝑥
12
6
𝑑𝑥 = [36 ln 𝑥]612 = 36 ln 12 − 36 ln 6
= 36 ln(2 ∙ 6) − 36 ln 6 = 36 ln 2 + 36 ln 6 − 36 ln 6
= 36 ln 2𝑢2
∎

26
6. Calcular el área limitada por la curva 𝑦 = 2(1 − 𝑥2) y la recta 𝑦 = −1.
Solución: Es necesario trasladar la gráfica de esta función, para poder calcular su área por
medio de integración. Si 𝑓(𝑥) = 2(1 − 𝑥2), entonces 𝑓(𝑥) + 1 será trasladada una unidad
verticalmente hacia arriba. El área no va a cambiar, puesto que solamente fue trasladada.
Buscando los puntos de intersección con el eje X, tenemos que
𝑓(𝑥) + 1 = 0⟺ 2(1 − 𝑥2) − 1 = 0 ⟺
2(1 − 𝑥2) = −1 ⟺ 𝑥 = √3
2−
+
𝐴 = ∫ (2(1 − 𝑥2) + 1)
√32
−√32
𝑑𝑥 = 2√6𝑢2

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
7. Hallar el área de la región del plano limitada por las curvas 𝑦 = ln 𝑥, 𝑦 = 2 y los ejes
coordenados.
Solución: Calculamos el punto de corte de la curva y la recta 𝑦 = 2.
ln 𝑥 = 2 ⟺ 𝑒2 = 𝑥
El área es igual al área del rectángulo 𝑂𝐴𝐵𝐶 menos el área bajo la curva 𝑦 = ln 𝑥. El área
de rectángulo es base por altura:
𝐴1 = 2𝑒2𝑢2
El área bajo la curva 𝑦 = ln 𝑥 es
𝐴2 = ∫ ln 𝑥 𝑑𝑥 =
𝑒2
1
[𝑥 ln 𝑥 − 𝑥]1𝑒2 = (𝑒2 + 1)𝑢2
Por lo tanto, el área pedida es
𝐴 = 𝐴1 − 𝐴2 = (𝑒2 − 1)𝑢2

8. Calcular el área del recinto limitado por la parábola 𝑦 = 𝑥2 + 2 y la recta que pasa por
los puntos (−1, 0) y (1, 4).
Solución: La ecuación de la recta que pasa por los puntos (−1, 0) y (1, 4) es
𝑦 = 2𝑥 + 2
Para encontrar los puntos de intersección, igualamos
𝑥2 + 2 = 2𝑥 + 2 ⇔ 𝑥 = 0,2
Luego, el área pedida se calcula por medio de la integral
𝐴 = ∫(2𝑥 + 2)
2
0
𝑑𝑥 −∫(𝑥2 + 2)
2
0
𝑑𝑥 =28
3
∎

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
9. Calcular el área de la región del plano limitada por el círculo 𝑥2 + 𝑦2 = 9.
Solución: El área del círculo es cuatro veces el área encerrada en el primer cuadrante
y los ejes de coordenadas.
∫√9 − 𝑥2 𝑑𝑥
Sea 𝑥 = 3 sin 𝑡 → 𝑑𝑥 = 3 cos 𝑡 𝑑𝑡. De esta forma,
∫√9 − 𝑥2 𝑑𝑥 = ∫√9 − (3 sin 𝑡)2 3 cos 𝑡 𝑑𝑡 = 3∫√9(1 − (sin 𝑡)2) cos 𝑡 𝑑𝑡
= 9∫(cos 𝑡)2 𝑑𝑡 = 9 [𝑡
2+1
4(sin2𝑡)2]
Por lo que
(9 [𝑡
2+1
4(sin2𝑡)2])
0
𝜋2=9
4𝜋𝑢2
De esta forma, el área total es
49
4𝜋𝑢2 = 9𝜋𝑢2
∎
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
30
1.3 Ejercicios propuestos
1. Encuentre 𝑔(𝑥) si 𝑔′(𝑥) =𝑥
√𝑥2+1 y 𝑔(0) = 2
2. Encuentre las siguientes integrales
a. ∫𝑥2√𝑥3 + 4𝑑𝑥
b. ∫𝑥2
𝑥3+8𝑑𝑥
c. ∫(𝑥 + 2) sin(𝑥2 + 4𝑥 − 6)𝑑𝑥
d. ∫𝑑𝑥
√𝑎+𝑏𝑥3 , 𝑎, 𝑏 ∈ ℝ
e. ∫𝑥2+1
𝑥−1𝑑𝑥
(Realice división de polinomios)
f. ∫𝑥+2
𝑥−1𝑑𝑥
(Realice división de polinomios)
g. ∫𝑥3
𝑥2+9𝑑𝑥
(Realice división de polinomios)
h. ∫𝑥2 cos 𝑥 𝑑𝑥
3. Integre, por medio del método de fracciones parciales
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
a. ∫𝑑𝑥
𝑥2−9
b. ∫2𝑥2+3
𝑥3−2𝑥2+𝑥𝑑𝑥
c. ∫3𝑥2+3𝑥+1
𝑥3+2𝑥2+2𝑥+1𝑑𝑥
d. ∫𝑥2+6
(𝑥−1)2(𝑥−2)2𝑑𝑥
e. ∫𝑥4−𝑥3+2𝑥2−𝑥+2
(𝑥−1)(𝑥2+2)2𝑑𝑥
f. ∫𝑥
(𝑥−1)(𝑥−2)(𝑥−−3)𝑑𝑥
g. ∫6𝑥2+7𝑥−1
𝑥3+2𝑥2−𝑥−2𝑑𝑥
4. Integre, por medio de sustitución trigonométrica.
a. ∫𝑑𝑥
𝑥√𝑥2−5
b. ∫𝑑𝑥
𝑥2√𝑥2+4
5. Hallar el área de la figura limitada por: 𝑦 = 𝑥2, 𝑦 = 𝑥, 𝑥 = 0, 𝑥 = 2
6. Calcular el área del recinto limitado por la parábola 𝑦 = 𝑥2 + 2 y la recta que pasa
por los puntos (−1, 0) y (1, 4).
7. Encuentre el valor de la siguiente integral impropia
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
32
∫ 𝑒−2𝑥∞
0
𝑑𝑥
2. Funciones de varias variables
2.1 Modelación de funciones
1. Considere la función 𝑓(𝑥, 𝑦) =ln(𝑥+𝑦)
2𝑥−3. Encuentre el valor de 𝑓(1,0), 𝑓(2,−1) y 𝑓(1,3)
Solución:
a. 𝑓(1,0) = 0
b. 𝑓(2, −1) = 0
c. 𝑓(1,3) = − ln 4 ≈ −1,386
∎
2. (Costo de una lata) Una lata cilíndrica tiene radio 𝑟 y altura ℎ. Si el material con que se
produce (considerando la lata cerrada) tiene un costo de $2 por unidad de área, exprese el
costo de la lata, 𝐶, como una función de 𝑟 y ℎ.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Solución El área 𝐴, de un cilindro de radio 𝑟 y altura ℎ, se determina por medio de la
fórmula
𝐴 = 2𝜋𝑟(ℎ + 𝑟)
Por lo que el costo de la lata, está determinado por 𝐶 = 2𝐴, es decir,
𝐶 = 𝐶(𝑟, ℎ) = 4𝜋𝑟(ℎ + 𝑟)
Por lo que el costo está en función de dos variables, a saber, 𝑟 y ℎ.
∎
3. (Costo de un tanque de agua) Un tanque rectangular abierto debe construirse de modo
que albergue 100 pies cúbicos de agua. Los costos del material son de $5 por pie cuadrado
en la base y de $3 por pie cuadrado en las paredes verticales. Si C denota el costo total (en
dólares), determine C como función de las dimensiones de la base.
Solución: Denotemos por 𝑥, 𝑦, 𝑧 el largo, ancho y alto de la caja rectangular,
respectivamente. Las dimensiones de la base, serán 𝑥 e 𝑦. Como la caja rectangular tiene
100 pies cúbicos de agua, tenemos que
𝑥𝑦𝑧 = 100
De donde obtenemos que 𝑧 =100
𝑥𝑦. Ahora bien, el costo por el material para hacer la base,
es de $5𝑥𝑦. El área total de las paredes verticales es de
2𝑥𝑧 + 2𝑦𝑧 = 2𝑥100
𝑥𝑦+ 2𝑦
100
𝑥𝑦=200
𝑦+200
𝑥
por lo que el costo de los materiales para las paredes verticales será de
3(200
𝑦+200
𝑥) =
600
𝑦+600
𝑥

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
34
De esta forma, el costo total (en dólares) para construir el tanque, será de
𝐶(𝑥, 𝑦) = 𝐶 = 5𝑥𝑦 +600
𝑦+600
𝑥
∎
2.2 Derivadas parciales
1. Encuentre 𝜕𝑓
𝜕𝑥 , 𝜕𝑓
𝜕𝑦 , 𝜕2𝑓
𝜕𝑥2, 𝜕2𝑓
𝜕𝑦2
donde
𝑓(𝑥, 𝑦) = (𝑥 +𝑦
𝑥) (5𝑥2 −
𝑦
𝑥2)
Solución: Multiplicando término a término, tenemos que
𝑓(𝑥, 𝑦) = 5𝑥3 −𝑦
𝑥+ 5𝑥𝑦 −
𝑦2
𝑥3
De esta forma,
𝜕𝑓
𝜕𝑥= 15𝑥2 +
𝑦
𝑥2+ 5𝑦 +
3𝑦2
𝑥4
𝜕2𝑓
𝜕𝑥2= 30𝑥 −
2𝑦
𝑥3−12𝑦2
𝑥5
𝜕𝑓
𝜕𝑦= −
1
𝑥+ 5𝑥 −
2𝑦
𝑥3
𝜕2𝑓
𝜕𝑦2= −
2
𝑥3
∎

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Interpretación Geométrica En el caso de una función 𝑓: 𝐴 ⊆ 𝑅2 → 𝑅, si existe 𝜕𝑓
𝜕𝑥(𝑎, 𝑏), se
tiene que 𝜕𝑓
𝜕𝑥(𝑎, 𝑏) corresponde a la pendiente de la recta tangente a la curva obtenida al
cortar la superficie 𝑧 = 𝑓(𝑥, 𝑦) por el plano 𝑦 = 𝑏 en el punto (𝑎, 𝑏, 𝑓(𝑎, 𝑏))
Recta tangente a la curva obtenida al cortar la superficie 𝑧 = 𝑓(𝑥, 𝑦) por el plano 𝑦 = 𝑏
en el punto (𝑎, 𝑏, 𝑓(𝑎, 𝑏))
Análogamente, 𝜕𝑓
𝜕𝑦(𝑎, 𝑏) corresponde a la pendiente de la recta tangente a la curva que se
obtiene al cortar la superficie 𝑧 = 𝑓(𝑥, 𝑦) por el plano 𝑥 = 𝑎 en el punto (𝑎, 𝑏, 𝑓(𝑎, 𝑏))
Observación Nada en principio nos impide volver a derivar 𝜕𝑓
𝜕𝑥(𝑎, 𝑏) y/o
𝜕𝑓
𝜕𝑦(𝑎, 𝑏) con
respecto a la variable 𝑥 o 𝑦. En el caso en que sea posible, cuando queramos derivar una
función con respecto a 𝑥 y luego con respecto a 𝑦, denotaremos esto por 𝜕2𝑓
𝜕𝑥𝜕𝑦(𝑎, 𝑏).
Análogamente en el orden inverso. Si queremos derivar dos veces con respecto a la misma
variable, digamos la variable 𝑥, lo escribiremos por 𝜕2𝑓
𝜕𝑥2(𝑎, 𝑏).

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
36
Ejemplo: Para la función 𝑓(𝑥, 𝑦) = 𝑧 + sin 𝑥𝑦, tenemos que
𝜕2𝑓
𝜕𝑥𝜕𝑦(𝑥, 𝑦) = cos 𝑥 𝑦 =
𝜕2𝑓
𝜕𝑦𝜕𝑥(𝑥, 𝑦)
Definición Sea 𝑓: 𝐴 ⊆ 𝑅𝑛 → 𝑅 una función y sea 𝑥 = (𝑥1, … , 𝑥𝑛) ∈ 𝐴. Diremos que 𝑓 es
diferenciable en 𝑥 sí y sólo sí
limℎ→𝑜
|𝑓(𝑥 + ℎ) − 𝑓(𝑥) − ∑ 𝐴𝑖ℎ𝑖𝑛𝑖=1 |
‖ℎ‖= 0
donde 𝜕𝑓
𝜕𝑥𝑖(𝑥) = 𝐴𝑖 y ℎ = (ℎ1, … ℎ𝑛)
Ejemplo
a. La función 𝑓(𝑥, 𝑦, 𝑧) = 𝑥 + 𝑦 + 𝑧 es diferenciable en todo (𝑎, 𝑏, 𝑐) ∈ 𝑅3. En efecto,
tenemos que
𝜕𝑓
𝜕𝑥(𝑎, 𝑏, 𝑐) =
𝜕𝑓
𝜕𝑦(𝑎, 𝑏, 𝑐) =
𝜕𝑓
𝜕𝑧(𝑎, 𝑏, 𝑐) = 1
De esta forma, tenemos que
lim(𝑥,𝑦,𝑧)→(0,0,0)
|𝑓((𝑎, 𝑏, 𝑐) + (𝑥, 𝑦, 𝑧)) − 𝑓(𝑎, 𝑏, 𝑐) − ∑ 𝐴𝑖ℎ𝑖𝑛𝑖=1 |
‖(𝑥, 𝑦, 𝑧)‖
= lim(𝑥,𝑦,𝑧)→(0,0,0)
|𝑓((𝑎 + 𝑥, 𝑏 + 𝑦, 𝑐 + 𝑧)) − 𝑓(𝑎, 𝑏, 𝑐) − (𝑥 + 𝑦 + 𝑧)|
‖(𝑥, 𝑦, 𝑧)‖

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
= lim(𝑥,𝑦,𝑧)→(0,0,0)
|𝑎 + 𝑥 + 𝑏 + 𝑦 + 𝑐 + 𝑧 − 𝑎 − 𝑏 − 𝑐 − 𝑥 − 𝑦 − 𝑧|
‖(𝑥, 𝑦, 𝑧)‖= 0
b. La función
𝑓(𝑥, 𝑦) = {
𝑥𝑦
𝑥2 + 𝑦2, 𝑠𝑖 (𝑥, 𝑦) ≠ (0,0)
0, 𝑠𝑖 (𝑥, 𝑦) = (0,0)
No es diferenciable en (0,0). En efecto, tenemos que
𝜕𝑓
𝜕𝑥(0,0) =
𝜕𝑓
𝜕𝑦(0,0) = 0
Por lo que
lim(𝑥,𝑦)→(0,0)
|𝑓((0,0) + (𝑥, 𝑦)) − 𝑓(0,0) − 0|
‖(𝑥, 𝑦)‖= lim(𝑥,𝑦)→(0,0)
|𝑓((𝑥, 𝑦)) − 0 − 0|
‖(𝑥, 𝑦)‖=
lim(𝑥,𝑦)→(0,0)
|𝑥𝑦
𝑥2 + 𝑦2|
‖(𝑥, 𝑦)‖= lim(𝑥,𝑦)→(0,0)
|𝑥𝑦|
(𝑥2 + 𝑦2)32
y este último límite no existe (Ejercicio)
Definición: Si 𝑓 es diferenciable, a la sumatoria ∑ 𝐴𝑖ℎ𝑖𝑛𝑖=1 = ∑
𝜕𝑓
𝜕𝑥𝑖(𝑥)ℎ𝑖
𝑛𝑖=1 de la definición
anterior, se le llama diferencial de 𝑓 y lo denotaremos por 𝑑𝑓
Observación: 𝑑𝑓 es una transformación lineal.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
38
Ejemplo Si se define la función 𝑓(𝑥, 𝑦, 𝑧) = 𝑥𝑦𝑒𝑧, el diferencial de 𝑓 en un punto (𝑥, 𝑦, 𝑧)
arbitrario es
𝑑𝑓 =𝜕𝑓
𝜕𝑥(𝑥, 𝑦, 𝑧)ℎ1 +
𝜕𝑓
𝜕𝑦(𝑥, 𝑦, 𝑧)ℎ2 +
𝜕𝑓
𝜕𝑧(𝑥, 𝑦, 𝑧)ℎ3
𝑑𝑓 = 𝑦𝑒𝑧ℎ1 + 𝑥𝑒𝑧ℎ2 + 𝑥𝑦𝑒
𝑧ℎ3
O en la notación clásica
𝑑𝑓 = 𝑦𝑒𝑧𝑑𝑥 + 𝑥𝑒𝑧𝑑𝑦 + 𝑥𝑦𝑒𝑧𝑑𝑧
El diferencial es una función de variables (ℎ1, ℎ2, ℎ3) o en notación clásica, de variables
(𝑑𝑥, 𝑑𝑦, 𝑑𝑧). Así, por ejemplo, tenemos que el diferencial en el punto (0,1,2) será la función
𝑑𝑓(ℎ1, ℎ2, ℎ3) = 𝑒2ℎ1
Definición En el caso en que 𝑓 sea diferenciable en 𝑥 ∈ 𝑅𝑛, la matriz de tamaño 1×𝑛
definida por
𝑓´(𝑥) = [𝜕𝑓
𝜕𝑥1(𝑥)
𝜕𝑓
𝜕𝑥2(𝑥) …… .
𝜕𝑓
𝜕𝑥𝑛(𝑥)]
Se llamará la derivada de 𝑓 en 𝑥 ∈ 𝑅𝑛
Observación Note que la derivada no es otra cosa que la matriz asociada al diferencial de
𝑓
Definición Sea 𝑓: 𝐴 ⊆ 𝑅𝑛 → 𝑅 una función tal que sus 𝑛 derivadas parciales de primer
orden existen en 𝐴. Entonces, la función
∇𝑓: 𝐴 ⊆ 𝑅𝑛 → 𝑅𝑛
Dada por ∇𝑓(𝑥) = (𝜕𝑓
𝜕𝑥1(𝑥), … ,
𝜕𝑓
𝜕𝑥𝑛(𝑥))
Se denomina gradiente de 𝑓.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Propiedades Sean 𝑓, 𝑔: 𝐴 ⊆ 𝑅𝑛 → 𝑅 funciones tales que sus 𝑛 derivadas parciales de
primer orden existen en 𝐴 y sea 𝛼 ∈ 𝑅. Entonces
i. ∇(𝛼𝑓(𝑥)) = 𝛼∇𝑓(𝑥)
ii. ∇(𝑓(𝑥) + 𝑔(𝑥)) = ∇𝑓(𝑥) + ∇𝑔(𝑥)
iii. ∇(𝑓(𝑥)𝑔(𝑥)) = 𝑓(𝑥)∇𝑔(𝑥) + 𝑔(𝑥)∇𝑓(𝑥)
iv. ∇ (𝑓(𝑥)
𝑔(𝑥))) =
𝑔(𝑥)∇𝑓(𝑥)−𝑓(𝑥)∇𝑔(𝑥)
𝑔(𝑥)2, siempre que 𝑔(𝑥) ≠ 0.
Definición Sea 𝑓: 𝐴 ⊆ 𝑅𝑚 → 𝑅 una función y sea 𝑎 ∈ 𝐴 y 𝑛 = (𝑛1, … , 𝑛𝑚) un vector
unitario en 𝑅𝑚. Si existe el límite
𝜕𝑓
𝜕𝑛(𝑎)= lim
ℎ→0
𝑓(𝑎 + ℎ𝑛) − 𝑓(𝑎)
ℎ
Entonces 𝜕𝑓
𝜕𝑛(𝑎) se llamará derivada direccional de 𝑓 en 𝑎 en la dirección del vector 𝑛.
Observación Note que si 𝑛 ∈ {(1,0,… ,0);… ; (0,… 0,1,… ,0);… . . ; (0,… ,0,1)} tendremos
la definición de derivada parcial.
Teorema Sea 𝑓:𝐴 ⊆ 𝑅𝑚 → 𝑅 una función diferenciable en 𝑎 ∈ 𝐴 y sea 𝑛 = (𝑛1, … , 𝑛𝑚)
un vector unitario en 𝑅𝑚. Entonces, 𝜕𝑓
𝜕𝑛(𝑎) existe y además se cumple que
𝜕𝑓
𝜕𝑛(𝑎) = ∇𝑓(𝑎) ∙ 𝑛
Ejercicio: Encuentre la derivada direccional de la función 𝑓(𝑥, 𝑦, 𝑧) = 2𝑥 + 𝑦 + 𝑧 en 𝑎 =
(1,1,1) en la dirección del vector (1,2,3)
Solución Usando la definición, tenemos en primer lugar que 𝑛 =(1,2,3)
‖(1,2,3)‖=
1
√14(1,2,3). De
esta forma

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
40
𝜕𝑓
𝜕𝑛(1,1,1)= lim
ℎ→0
𝑓 ((1,1,1) + ℎ1
√14(1,2,3)) − 𝑓((1,1,1)
ℎ
= limℎ→0
𝑓 (1 +ℎ
√14, 1 +
2ℎ
√14, 1 +
3ℎ
√14) − 4
ℎ
= limℎ→0
2 +2ℎ
√14+ 1 +
2ℎ
√14+ 1 +
3ℎ
√14− 4
ℎ
= limℎ→0
7ℎ
√14ℎ
= limℎ→0
7
√14=
7
√14
Ahora, usando el teorema anterior, tenemos que
𝜕𝑓
𝜕𝑛(1,1,1) = ∇𝑓(1,1,1) ∙ 𝑛
= (2,1,1) ∙1
√14(1,2,3)
=2
√14+
2
√14+
3
√14=
7
√14
∎
Teorema Sea 𝑓:𝐴 ⊆ 𝑅2 → 𝑅 una función diferenciable en (𝑎, 𝑏) ∈ 𝐴. Entonces, la
ecuación del plano tangente a la superficie de ecuación dada por 𝑧 = 𝑓(𝑥, 𝑦) en el punto
(𝑎, 𝑏, 𝑓(𝑎, 𝑏) es
𝑧 − 𝑓(𝑎, 𝑏) =𝜕𝑓
𝜕𝑥(𝑎, 𝑏)(𝑥 − 𝑎) +
𝜕𝑓
𝜕𝑦(𝑎, 𝑏)(𝑦 − 𝑏)
Ejemplo Considere la función 𝑓(𝑥, 𝑦) = √𝑥+𝑦
2. Hagamos 𝑎 = 1 y 𝑏 = 0. En este caso,

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
𝑓(𝑎, 𝑏) = 𝑓(1,0) =1
2
Además, 𝜕𝑓
𝜕𝑥(1,0) =
1
4=𝜕𝑓
𝜕𝑦(1,0). De esta forma, la ecuación del plano tangente a la
superficie de ecuación 𝑧 = √𝑥+𝑦
2 en el punto (1,0,
1
2 ) será
𝑧 −1
2=1
4(𝑥 − 1) +
1
4𝑦
𝑧 −1
2=1
4𝑥 −
1
4+1
4𝑦
−1
4=1
4𝑥 +
1
4𝑦 − 𝑧
1 = −𝑥 − 𝑦 + 4𝑧
2.3 Ejercicios propuestos
1. Sea
𝑓(𝑥, 𝑦) =
{
(𝑥 − 𝑦)2
𝑥2 + 𝑦2, 𝑠𝑖 (𝑥, 𝑦) ≠ (0,0)
1, 𝑠𝑖 (𝑥, 𝑦) ≠ (0,0)
Calcule 𝜕𝑓
𝜕𝑥(0,0) ,
𝜕𝑓
𝜕𝑦(0,0) y
𝜕𝑓
𝜕𝑥(1,0)
2. Sea
𝑓(𝑥, 𝑦) =
{
𝑥2𝑦2
𝑥2 + 𝑦2, 𝑠𝑖 (𝑥, 𝑦) ≠ (0,0)
0, 𝑠𝑖 (𝑥, 𝑦) ≠ (0,0)
¿Es 𝑓 diferenciable en (0,0)?

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
42
3. Encuentre la ecuación del plano tangente a la superficie de ecuación 𝑧 =𝑥2𝑦2
𝑥2+𝑦2 en el
punto (1,0,0).
4. Encuentre la derivada y el diferencial de la función 𝑓(𝑥, 𝑦) =𝑥+𝑦
3𝑥−𝑦
5. Verifique que
𝜕3𝑓
𝜕𝑥𝜕𝑦𝜕𝑧(𝑥, 𝑦, 𝑧) =
𝜕3𝑓
𝜕𝑧𝜕𝑦𝜕𝑥(𝑥, 𝑦, 𝑧)
para 𝑓(𝑥, 𝑦, 𝑧) = 𝑧𝑒𝑥𝑦 + 𝑦𝑧3𝑥2
6. Sea 𝑓(𝑥, 𝑦) = 𝑥3 − 3𝑥𝑦2. Demuestre que
𝜕2𝑓
𝜕𝑥2+𝜕2𝑓
𝜕𝑦2= 0
3. Funciones con valores vectoriales
Definición Una función 𝜎: [𝑎, 𝑏] → 𝑅𝑛 se denomina trayectoria. La imagen de 𝜎 se llama
curva en ℝ𝑛.
Ejemplos
a. La función 𝜎: [0,2𝜋] → ℝ2 dada por 𝜎(𝑡) = (cos 𝑡 , sin 𝑡) es una trayectoria, cuya
imagen es una circunferencia de centro en el origen y radio1.
b. La función 𝜎: [0,∞[ → ℝ2 dada por 𝜎(𝑡) = (𝑡, √𝑡) es una trayectoria.
c. La función 𝜎: 𝑅 → ℝ3 dada por 𝜎(𝑡) = (cos 𝑡 , sin 𝑡 , 𝑡) es una trayectoria. La imagen de
esta trayectoria se llama hélice circular recta.
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Observación: Una trayectoria en ℝ2 será de la forma 𝜎(𝑡) = (𝑥(𝑡), 𝑦(𝑡)) y una trayectoria
en ℝ3 será de la forma 𝜎(𝑡) = (𝑥(𝑡), 𝑦(𝑡), 𝑧(𝑡)) , donde 𝑥(𝑡), 𝑦(𝑡), 𝑧(𝑡) en ambos casos
son funciones de variable y recorrido real.
Definición Sea 𝜎: [𝑎, 𝑏] → ℝ3 una trayectoria de clase 𝐶1. El vector velocidad en 𝜎(𝑡) se
define como 𝑣(𝑡) = (𝜕𝑥
𝜕𝑡,𝜕𝑦
𝜕𝑡,𝜕𝑧
𝜕𝑡) y el vector rapidez en 𝜎(𝑡) se define como 𝑟(𝑡) = ‖𝑣(𝑡)‖.
Análogamente, se definen velocidad y rapidez para una trayectoria 𝜎: [𝑎, 𝑏] → ℝ2.
1. La trayectoria 𝜎(𝑡) = (cos 𝑡 , sin 𝑡 , 𝑡) en cada punto tiene una velocidad 𝑣(𝑡) =
(− sin 𝑡 , cos 𝑡 , 1), mientras que en cada punto posee una rapidez
‖𝑣(𝑡)‖ = √(−sin 𝑡)2 + (cos 𝑡)2 + 1 = √2

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
44
Podemos deducir que el punto se mueve con rapidez constante, mientras que velocidad no
es constante.
Teorema Sea 𝑓:𝐴 ⊆ ℝ3 → ℝ, diferenciable y suponga que ∇𝑓(𝑎, 𝑏, 𝑐) ≠ (0,0,0). Entonces
un vector normal a la superficie de nivel 𝑆 definida por la ecuación 𝑓(𝑥, 𝑦, 𝑧) = 𝑑 en el
punto (𝑎, 𝑏, 𝑐) ∈ 𝑆, es el vector ∇𝑓(𝑎, 𝑏, 𝑐). Lo mismo se tiene para una función 𝑓:𝐴 ⊆
ℝ2 → ℝ.
2. Encuentre un vector normal a la superficie de la esfera unitaria centrada en el origen
en el punto (1
2,1
2,√2
2)
Solución La esfera tiene por ecuación 𝑥2 + 𝑦2 + 𝑧2 = 1. En este caso, tenemos que
𝑓(𝑥, 𝑦, 𝑧) = 𝑥2 + 𝑦2 + 𝑧2 y 𝑑 = 1. Luego, ∇𝑓(𝑥, 𝑦, 𝑧) = (2𝑥, 2𝑦, 2𝑧) y así,
∇𝑓 (1
2,1
2,√2
2) = (1,1, √2)
∎
3. Demuestre que la derivada direccional de 𝑓(𝑥, 𝑦) =𝑦2
𝑥, en cualquier punto de la elipse
2𝑥2 + 𝑦2 = 𝑐2 en la dirección de la normal a la curva es nula.
Solución La elipse será descrita por la función 𝐹(𝑥, 𝑦) = 2𝑥2 + 𝑦2 en el nivel 𝑐2. Por el
Teorema anterior, un vector normal a la elipse será ∇𝐹(𝑥, 𝑦) = (4𝑥, 2𝑦), siempre y cuando
(𝑥, 𝑦) ≠ (0,0) pues de otra forma ∇𝐹(𝑥, 𝑦) = (0,0). Sea 𝑛 =(4𝑥,2𝑦)
‖(4𝑥,2𝑦)‖ . De esta forma, si
(𝑥, 𝑦) es un punto de la elipse, tendremos que
𝜕𝑓
𝜕𝑛(𝑥, 𝑦) = ∇𝑓(𝑥, 𝑦) ∙
(4𝑥, 2𝑦)
‖(4𝑥, 2𝑦)‖
= (−𝑦2
𝑥2,2𝑦
𝑥) ∙
(4𝑥, 2𝑦)
‖(4𝑥, 2𝑦)‖

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
=1
‖(4𝑥, 2𝑦)‖(−
4𝑦2
𝑥+4𝑦2
𝑥)
=1
‖(4𝑥, 2𝑦)‖∙ 0 = 0
Definición Sea 𝜎: [𝑎, 𝑏] → ℝ3 una trayectoria de clase 𝐶1. La longitud de 𝜎 está definida
como
𝑙(𝜎) = ∫ ‖𝑑𝜎
𝑑𝑡‖𝑑𝑡
𝑏
𝑎
Definición Sea 𝐹 = (𝑓1, 𝑓2, 𝑓3) un campo vectorial.
i. Se define el rotacional de 𝐹 como
𝑟𝑜𝑡(F) = ∇×𝐹 = det
[ 𝑖 𝑗 𝑘𝜕
𝜕𝑥
𝜕
𝜕𝑦
𝜕
𝜕𝑧𝑓1 𝑓2 𝑓3 ]
ii. Se define la divergencia de 𝐹 como
𝑑𝑖𝑣(𝐹) = ∇ ∙ 𝐹 =𝜕𝑓1𝜕𝑥
+𝜕𝑓2𝜕𝑦
+𝜕𝑓3𝜕𝑧
Propiedades La divergencia y el rotacional cumplen las siguientes propiedades
i. 𝑑𝑖𝑣(𝐹 + 𝐺) = 𝑑𝑖𝑣(𝐹) + 𝑑𝑖𝑣(𝐺)
ii. 𝑟𝑜𝑡(F + G) = 𝑟𝑜𝑡(F) + 𝑟𝑜𝑡(G)
iii. 𝑑𝑖𝑣(𝐹×𝐺) = 𝐺 ∙ 𝑟𝑜𝑡(F) − F ∙ 𝑟𝑜𝑡(G)
iv. 𝑑𝑖𝑣(𝑟𝑜𝑡(F)) = 0
4. Máximos y mínimos

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
46
4.1 Criterio del Hessiano
Definición Sea 𝑓: 𝐴 ⊆ ℝ2 → ℝ y sea 𝑎 ∈ 𝐴
i. Diremos que 𝑎 es un máximo relativo o local si y solamente sí, existe 𝑟 > 0 tal que
𝑓(𝑥) ≤ 𝑓(𝑎) ∀𝑥 ∈ 𝐵(𝑎, 𝑟)
Si esta desigualdad se cumple para todo elemento de 𝐴, diremos que 𝑎 es un máximo
global.
ii. Diremos que 𝑎 es un mínimo relativo o local si y solamente sí, existe 𝑟 > 0 tal que
𝑓(𝑥) ≥ 𝑓(𝑎) ∀𝑥 ∈ 𝐵(𝑎, 𝑟)
Si esta desigualdad se cumple para todo elemento de 𝐴, diremos que 𝑎 es un mínimo
global.
iii. Si 𝑎 es un máximo o mínimo relativo diremos que 𝑎 es un extremo relativo o local de 𝑓.
iv. Si 𝑎 no es ni un máximo ni un mínimo relativo diremos que 𝑎 es un punto silla o punto
de ensilladura de 𝑓.
v. Un punto 𝑎 ∈ 𝐴 se dice un punto crítico si todas sus derivadas parciales en 𝐴 existen y
valen cero, es decir
𝜕𝑓
𝜕𝑥𝑖(𝑎) = 0, ∀ 𝑖 = 1,2
Teorema: Sea 𝑓: 𝐴 ⊆ ℝ2 → ℝ , donde 𝐴 es una región del plano y sea 𝑎 ∈ 𝐴. Si 𝑎 es un
extremo relativo, entonces es un punto crítico.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
De esta forma, para obtener los extremos relativos de una función, será necesario buscar
sus puntos críticos.
Definición Se define la matriz Hessiana en un punto (𝑎, 𝑏) ∈ 𝐴 de una función 𝑓: 𝐴 ⊆ ℝ2 →
ℝ como
𝐻(𝑎, 𝑏) =
(
𝜕2𝑓
𝜕𝑥2(𝑎, 𝑏)
𝜕𝑓
𝜕𝑥𝜕𝑦(𝑎, 𝑏)
𝜕𝑓
𝜕𝑦𝜕𝑥(𝑎, 𝑏)
𝜕2𝑓
𝜕𝑦2(𝑎, 𝑏)
)
Observación Evidentemente, la función 𝑓 debe de tener, al menos, todas sus derivadas de
segundo orden en el punto (𝑎, 𝑏)
Teorema Sea 𝑓:𝐴 ⊆ ℝ2 → ℝ una función con segundas derivadas parciales continuas en
una vecindad de un punto crítico (𝑎, 𝑏) ∈ 𝐴. Entonces (𝑎, 𝑏) es
i. Un mínimo local, si |𝐻(𝑎, 𝑏)| > 0 𝑦 𝜕2𝑓
𝜕𝑥2(𝑎, 𝑏) > 0
ii. Un máximo local, si |𝐻(𝑎, 𝑏)| > 0 𝑦 𝜕2𝑓
𝜕𝑥2(𝑎, 𝑏) < 0
iii. Un punto silla, si |𝐻(𝑎, 𝑏)| < 0
Teorema Sea 𝑓, 𝑔1, … 𝑔𝑘: 𝐴 ⊆ ℝ𝑛 → ℝ con 𝑘 ≤ 𝑛 − 1 funciones definidas en la región 𝐴
de clase 𝐶1 en (𝑎, 𝑏) ∈ 𝐴. Para que (𝑎, 𝑏) sea un extremo de la función 𝑓 sujeto a las
condiciones
𝑔1(𝑎, 𝑏) = 0 ; … ; 𝑔𝑘(𝑎, 𝑏) = 0
Con ∇𝑔𝑗(𝑎, 𝑏) ≠ 0⃗ , 𝑗 = 1, …𝑘 y ∇𝑓(𝑎, 𝑏) ≠ 0⃗ , es necesario que existan constantes 𝛾𝑗 ≠ 0
tales que

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
48
∇𝑓(𝑎, 𝑏) = ∑𝛾𝑗 ∇𝑔𝑗(𝑎, 𝑏)
𝑘
𝑗=1
Definición Las constantes 𝛾𝑗 , 𝑗 = 1,… , 𝑘 se llaman multiplicadores de Lagrange.
A continuación, presentaremos un Teorema de bastante utilidad para encontrar máximos
y/o mínimos globales de una función.
Teorema Sea 𝑓:𝐴 ⊆ ℝ𝑛 → ℝ, continua en un compacto 𝐴. Entonces existen 𝑥0, 𝑥1 ∈ 𝐴
tales que
𝑓(𝑥0) = min𝑥∈𝐴
𝑓(𝑥) y 𝑓(𝑥1) = max𝑥∈𝐴
𝑓(𝑥)
Ejemplos
a. Para encontrar los extremos relativos de la función 𝑓(𝑥, 𝑦) = 𝑥2 + 𝑥𝑦 + 𝑦2, en primer
lugar debemos buscar los puntos críticos de esta función. Para esto, resolveremos el
sistema de ecuaciones dado por
𝜕𝑓
𝜕𝑥= 0 ↔ 2𝑥 + 𝑦 = 0
𝜕𝑓
𝜕𝑦= 0 ↔ 2𝑦 + 𝑥 = 0
Sistema cuya solución única es (0,0). Para determinar la naturaleza de este punto,
usaremos la matriz Hessiana de 𝑓. Tenemos que
𝐻(0,0) =
(
𝜕2𝑓
𝜕𝑥2(0,0)
𝜕𝑓
𝜕𝑥𝜕𝑦(0,0)
𝜕𝑓
𝜕𝑦𝜕𝑥(0,0)
𝜕2𝑓
𝜕𝑦2(0,0)
)
= (
2 11 2
)

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
De donde se tiene que |𝐻(0,0)| = 3 > 0 𝑦 𝜕2𝑓
𝜕𝑥2(0,0) = 2 > 0 y por lo tanto (0,0) es un
mínimo local de 𝑓
1. Hallar los extremos relativos de la siguiente función
𝑓(𝑥, 𝑦) = 4𝑥𝑦 − 𝑥4 − 𝑦4
Solución: En primer lugar, encontramos los puntos críticos, así que derivando con respecto
a cada variable, e igualando a cero, tenemos
(1) 4𝑦 − 4𝑥3 = 0
(2) 4𝑥 − 4𝑦3 = 0
O, de forma equivalente
(1) 𝑦 − 𝑥3 = 0
(2) 𝑥 − 𝑦3 = 0
De (1) tenemos que
𝑦 = 𝑥3
Reemplazando en (2), tenemos que
𝑥 − 𝑥9 = 0
𝑥(1 − 𝑥8) = 0
De donde obtenemos que 𝑥 = 0 o 𝑥 = 1. Para cada uno de estos valores, se obtienen
valores de 𝑦. De esta forma, los puntos críticos son (0,0) y (1,1).

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
50
Ahora bien,
𝜕2𝑓
𝜕𝑥2= 12𝑥2
𝜕2𝑓
𝜕𝑦2= 12𝑦2
𝜕𝑓
𝜕𝑥𝜕𝑦= 4
Como tenemos que
𝜕2𝑓
𝜕𝑥2(0,0) = 0
(no podemos decir si es un máximo o mínimo)
Ahora bien,
𝜕2𝑓
𝜕𝑥2(1,1) = 12 > 0
Δ(1,1) = 144 − 16 = 128 > 0
Por lo que (1,1) es mínimo.
4.2 Multiplicadores de Lagrange
1. Encuentre los extremos relativos de la función 𝑓(𝑥, 𝑦) = 𝑥2 + 𝑥𝑦 + 𝑦2, sujeta a la
condición 𝑥 + 2𝑦 = 3
Solución: Utilizaremos el método de los multiplicadores de Lagrange. En primer lugar,
buscaremos la solución de

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
∇𝑓(𝑥, 𝑦) = 𝛾∇𝑔(𝑥, 𝑦)
𝑥 + 2𝑦 = 3
Donde 𝑔(𝑥, 𝑦) = 𝑥 + 2𝑦 − 3. De esta forma, tenemos que resolver el sistema
2𝑥 + 𝑦 = 𝛾
2𝑦 + 𝑥 = 2𝛾
𝑥 + 2𝑦 = 3
De donde la solución será (0,3
2).
Para determinar su naturaleza, utilizaremos el criterio de la segunda derivada para la
función
ℎ(𝑥) = 𝑓 (𝑥,3 − 𝑥
2) =
3
4𝑥2 +
9
4
tenemos que 𝜕2ℎ
𝜕𝑥2(𝑥) =
3
2> 0. Así, 𝑥 = 0 es un mínimo local de ℎ, lo que implica que (0,
3
2)
es un mínimo local de 𝑓.
2. Una caja de cartón sin tapa debe tener 32.000 cm cúbicos. Calcule las dimensiones que
minimicen la cantidad de cartón.
Solución: Sean 𝑥, 𝑦, 𝑧 las dimensiones de la caja rectangular sin tapa (ancho, largo y alto,
respectivamente).
El volumen de esta caja, será
𝑉(𝑥, 𝑦, 𝑧) = 𝑥𝑦𝑧 = 32.000

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
52
Por lo que
𝑔(𝑥, 𝑦, 𝑧) = 𝑥𝑦𝑧 − 32.000
El área de la caja, será
𝑓(𝑥, 𝑦, 𝑧) = 2𝑧𝑥 + 2𝑧𝑦 + 𝑦𝑥
El sistema, al utilizar el método de multiplicadores de Lagrange, es
(1) 2𝑧 + 𝑦 = 𝜆𝑦𝑧
(2) 2𝑧 + 𝑥 = 𝜆𝑥𝑧
(3) 2𝑥 + 2𝑦 = 𝜆𝑥𝑦
De (1) y (2), tenemos que
𝜆𝑦𝑧 − 𝑦 = 𝜆𝑥𝑧 − 𝑥
𝜆𝑧(𝑦 − 𝑥) = 𝑦 − 𝑥
Si 𝑦 ≠ 𝑧, entonces al simplificar, tendríamos que 𝜆𝑧 = 1 y de esta manera, al reemplazar
en (1) tendríamos que
2𝑧 + 𝑦 = 𝑦
𝑧 = 0
Lo cual no puede ser, pues la caja no está aplastada, al tener volumen positivo. De esta
forma, 𝑦 = 𝑧
Reemplazando en (3), tenemos

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
4𝑥 = 𝜆𝑥2
4 = 𝜆𝑥
Reemplazando esto último en (2)
2𝑧 + 𝑥 = 4𝑧
𝑥 = 2𝑧
Como se cumple que 𝑉(𝑥, 𝑦, 𝑧) = 𝑥𝑦𝑧 = 32.000, y tenemos que 𝑦 = 𝑥 = 2𝑧, entonces
𝑥3
2= 32.000
𝑥3 = 64.000
𝑥 = 40
De esta forma, 𝑦 = 40 , 𝑧 = 20.
∎
3. Una sonda espacial con la forma del Elipsoide 4𝑥2 + 𝑦2 + 4𝑧2 = 16, entra a la
atmósfera de la Tierra y su superficie comienza a calentarse. Después de una hora, la
temperatura en el punto (𝑥, 𝑦, 𝑧) sobre la superficie de la sonda es
𝑇(𝑥, 𝑦, 𝑧) = 8𝑥2 + 4𝑦𝑧 − 16𝑧 + 600
Determine el punto más caliente sobre la superficie de la sonda.
Solución: Utilizando el método de multiplicadores de Lagrange, tenemos el siguiente
sistema

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
54
• 16𝑥 = 𝛾8𝑥
• 4𝑧 = 2𝛾𝑦
• 4𝑦 − 16 = 8𝛾𝑧
• 4𝑥2 + 𝑦2 + 4𝑧2 = 16
Caso 1: 𝛾 = 2
En este caso, tendremos que 𝑦 = 𝑧 = −4
3, mientras que 𝑥 =
4
3−+ . De esta forma,
obtendremos los puntos 𝑃1 = (−4
3, −
4
3, −
4
3) y 𝑃2 = (−
4
3, −
4
3,4
3)
Caso 2: 𝛾 ≠ 2. En este caso, 𝑥 = 0 y resolviendo el sistema, obtendremos los puntos 𝑃3 =
(0,4,0), 𝑃4 = (0,−2,−√3) y 𝑃5 = (0,−2,√3).
De esta forma, hemos encontrado todos los posibles valores extremos de la función
𝑇(𝑥, 𝑦, 𝑧) = 8𝑥2 + 4𝑦𝑧 − 16𝑧 + 600 en la elipsoide, el cual es un conjunto compacto y por
el teorema anterior, posee un máximo global en este dominio. Reemplazando en la función,
tenemos que los valores en donde la función toma su máximo valor son los puntos 𝑃1 =
(−4
3, −
4
3, −
4
3) y 𝑃2 = (−
4
3, −
4
3,4
3).
∎
4. Encuentre los máximos y mínimos de la función 𝑓(𝑥, 𝑦) = 4𝑥𝑦, sujeta a las condiciones x2
9+y2
16= 1
Solución: Sea
𝑔(𝑥, 𝑦) =𝑥2
9+𝑦2
16− 1
El sistema, al utilizar los multiplicadores de Lagrange, tenemos

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
(1) 4𝑦 =2𝜆
9𝑥
(2) 4𝑥 =2𝜆
16𝑦
De (1), tenemos que 𝑦 =𝜆
18𝑥. Reemplazando en (2) nos queda:
4𝑥 =2𝜆
16∙𝜆
18𝑥
4𝑥 =2𝜆2
288𝑥
4𝑥 =𝜆2
144𝑥
576𝑥 = 𝜆2𝑥
0 = 𝜆2𝑥 − 576𝑥
0 = 𝑥(𝜆2 − 576)
De donde obtenemos que 𝑥 = 0 o λ = √576 = 24
Si 𝑥 = 0, entonces 𝑦 = 4−+ , de donde sacamos dos puntos, a saber, (0,4) y (0,−4). Si λ =
24, tenemos que
𝑥2
9+𝑦2
16= 1
𝑥2
9+(𝜆18𝑥)
2
16= 1

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
56
𝑥2
9+
𝜆2
32416
𝑥2 = 1
𝑥2
9+
57632416
𝑥2 = 1
𝑥2
9+𝑥2
9= 1
2𝑥2
9= 1
𝑥 =3
2√2
−
+
Como
𝑦 =𝜆
18𝑥 =
24
18𝑥 =
4
3𝑥
Tenemos entonces que
𝑦 = 2√2−+
De donde se obtienen los puntos (3
2√2, 2√2, ) y (−
3
2√2,−2√2, )
Reemplazando todos estos puntos en la función 𝑓, encontraremos los máximos y mínimos.
∎
5. Hallar los valores máximos y mínimos absolutos de la función 𝑓(𝑥, 𝑦) = 𝑥𝑦 en el
rectángulo R = [−1,1]×[−1,1]

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
Solución Dado que la función 𝑓(𝑥, 𝑦) es continua en el compacto 𝑅 = [−1,1]×[−1,1],
tenemos asegurada la existencia de un máximo y mínimo absoluto en 𝑅. Debemos tener
en cuenta que estos extremos pueden estar tanto en el interior como en la frontera de este
conjunto. Para buscar los extremos en el interior, buscaremos, en primer lugar, los puntos
críticos de la función. Resolvemos entonces
𝑑𝑓
𝑑𝑥(𝑥, 𝑦) = 𝑦 = 0
𝑑𝑓
𝑑𝑦(𝑥, 𝑦) = 𝑥 = 0
De esta forma, obtenemos el punto crítico (0,0) ubicado en el interior de 𝑅. Para
determinar su naturaleza usaremos el criterio de la matriz Hessiana
𝐻(0,0) =
(
𝜕2𝑓
𝜕𝑥2(0,0)
𝜕𝑓
𝜕𝑥𝜕𝑦(0,0)
𝜕𝑓
𝜕𝑦𝜕𝑥(0,0)
𝜕2𝑓
𝜕𝑦2(0,0)
)
= (
0 11 0
)
De donde obtenemos que (0,0) es un punto silla. Analicemos la frontera de 𝑅:
• {(𝑥,−1):−1 ≤ 𝑥 ≤ 1} En este conjunto, la función toma la forma ℎ(𝑥) = 𝑓(𝑥, −1) = −𝑥.
Esta función toma sus valores máximos y mínimos en los puntos 𝑥 = −1 y 𝑥 = 1,
respectivamente. Con esto, obtenemos los puntos (−1,−1) , (1, −1).
• {(−1, 𝑦):−1 ≤ 𝑦 ≤ 1} En este conjunto, la función toma la forma 𝑔(𝑦) = 𝑓(−1, 𝑦) = −𝑦.
Esta función toma sus valores máximos y mínimos en los puntos 𝑦 = −1 y 𝑦 = 1,
respectivamente. Con esto, obtenemos los puntos (−1,−1) , (−1,1).
• {(𝑥, 1): −1 ≤ 𝑥 ≤ 1} En este conjunto, la función toma la forma 𝑠(𝑥) = 𝑓(𝑥, 1) = 𝑥. Esta
función toma su máximo y mínimo en 𝑥 = 1 e 𝑥 = −1, respectivamente. Con esto,
obtenemos los puntos (1,1), (−1,1)
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
58
• {(1, 𝑦):−1 ≤ 𝑦 ≤ 1} En este conjunto, la función toma la forma 𝑚(𝑦) = 𝑓(1, 𝑦) = 𝑦. Esta
función toma su máximo y mínimo en 𝑦 = 1 e 𝑦 = −1, respectivamente. Con esto,
obtenemos los puntos (1,1), (1, −1)
De esta forma, tenemos los posibles extremos de la función, un son los puntos de la
frontera: (−1, −1) , (1, −1), (−1,1), (1,1). Como estos puntos son todos los extremos
posibles tenemos que los puntos (−1,−1) y (1,1) son los máximos absolutos de la función,
y los puntos (1, −1) 𝑦 (−1,1) son los mínimos absolutos de la función.
∎
4.3 Ejercicios propuestos
1. (Costo mínimo de producción) Una empresa produce dos tipos de productos, A y B. El
costo diario total (en dólares) de producir x unidades de A e y unidades de B está dado
por
𝐶(𝑥, 𝑦) = 250 − 4𝑥 − 7𝑦 + 0,2𝑥2 + 0,1𝑦2
Determine el número de unidades de A y B que la empresa debe producir al día con el
propósito de minimizar el costo total.
2. (Uso óptimo de capital y mano de obra) Usando L unidades de mano de obra y K
unidades de capital, una empresa puede elaborar P unidades de su producto, en donde
𝑃(𝐿, 𝐾) = 60𝐿23𝐾
13
Los costos de la mano de obra y del capital son de $64 y $108 por unidad. Suponga que
la empresa decide elaborar 2160 unidades de su producto. Por medio del método de
multiplicadores de Lagrange, halle el número de insumos de mano de obra y de capital
que deben emplearse con el objetivo de minimizar el costo total.

Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
3. Una caja de cartón sin tapa debe tener 32.000 cm cúbicos, Calcule las dimensiones que
minimicen la cantidad de cartón.
4. Encuentre los extremos relativos de las siguiente función, sujeta a las condiciones
𝑓(𝑥, 𝑦) = 𝑥2 − 𝑦2 ;
𝑥 − 2𝑦 + 6 = 0
5. Encuentre los extremos relativos de las siguiente función
𝑓(𝑥, 𝑦) = 𝑥3 + 3𝑦2𝑥 − 15𝑥 − 12𝑦
6. Encuentre los extremos relativos de las siguiente función
𝑓(𝑥, 𝑦) = 𝑥2 + 𝑦2 + 𝑥𝑦 − 3𝑥 − 6𝑦 + 1
7. Encuentre los extremos relativos de las siguiente función
𝑓(𝑥, 𝑦) = 𝑥2 + 𝑦4
8. En cualquier punto (𝑥, 𝑦) de la curva 4𝑥2 + 12𝑦2 = 1 la temperatura (en grados
Celcius) es 𝑇 grados, donde
𝑇 = 4𝑥2 + 24𝑦2 − 2𝑥
Determine los puntos de la curva en donde la temperatura es máxima y donde es
mínima. También calcule la temperatura en esos puntos.
9. Se requiere cortar y decorar un espejo rectangular de área 40 dm2. Si los adornos a lo
largo de los lados horizontales cuestan 16 centavos por decímetro y los de los lados
verticales cuestan 25 centavos por decímetro, ¿Cuáles son las dimensiones que
minimizan el costo total?
Vicerrectoría Académica
Facultad de Ingeniería, Ciencia y Tecnología
Departamento de Matemáticas y Física
60
5. Conclusiones
El objetivo de este apunte es ayudar a los estudiantes de la UBO a complementar su estudio. Se recomienda, que además de este trabajo, utilice otros textos de Matemática para su estudio.
La proyección de estos apuntes está dirigida a extender la cantidad de ejercicios que posee, tanto resueltos como propuestos. Todo esto, a medida que siga trabajando como profesor universitario (que espero sean muchísimos años más), con el fin de otorgar al estudiante un material que le sea cada vez más completo.
6. Bibliografía de apoyo
Hoffmann, L. (1998). Cálculo para Administración, Economía y Ciencias Sociales. Bogotá:
McGraw-Hill.
Jagdish, A., Lardner, R. (2002). Matemáticas aplicadas a la administración y a la economía.
México: Pearson.
Leithold, L. (1998). El Cálculo. México: Oxford University Press.



