Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Simulador de grúa hidráulica para aplicaciones marinas.
Proyecto de fin de carrera.
Autor: Pedro Cobo Beltrán
Tutor: Daniel Dopico Dopico
Enero, 2011
Ingeniería Industrial.

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Índice
Grúa real Dinámica de sólidos multicuerpo Software utilizado
MBSLIMf90: Dinámica SDL: Inputs de usuario OSG: Salida gráfica
Conclusiones Simulación

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Grúa real
Introducción Descripción
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Grúa real
Motivación. Propuesta de la empresa Industrias Guerra.
Objetivos. Simulador de grúa basado en cálculo dinámico en tiempo real.
Entrenamiento.
Diseño.
Antecedentes. Software de simulación dinámica en tiempo real.

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
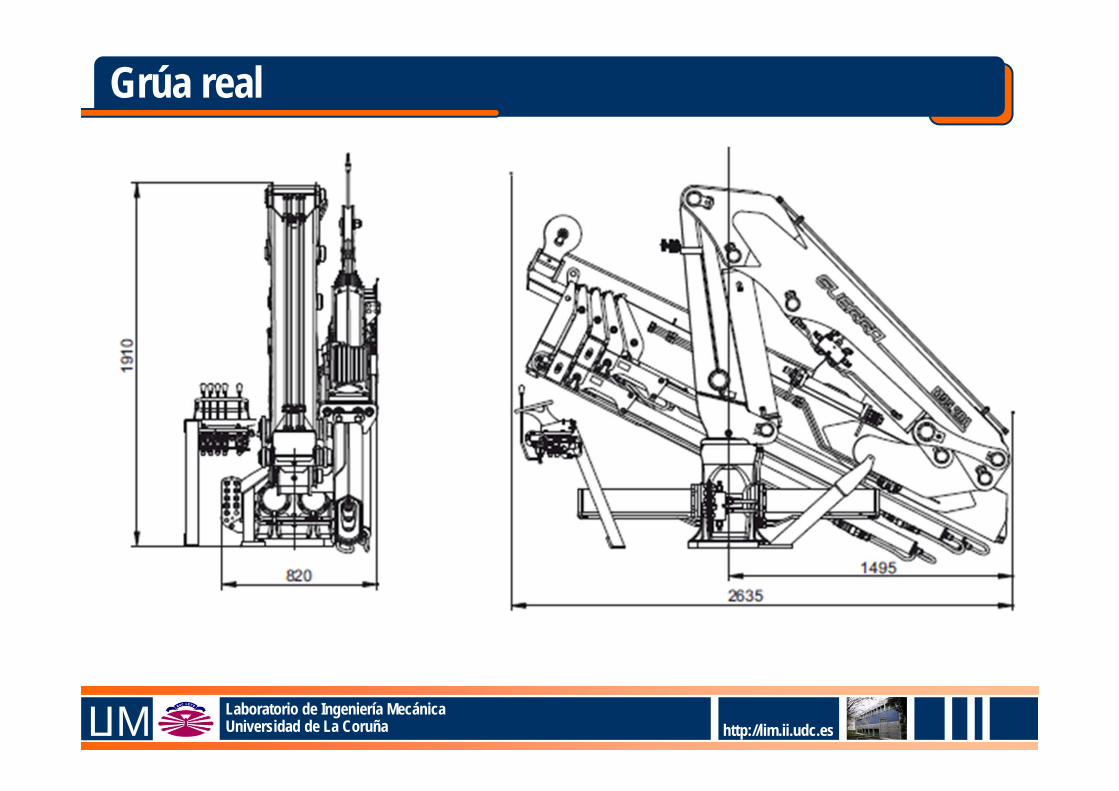
Grúa real
Grúa M95.20 A Industrias Guerra
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
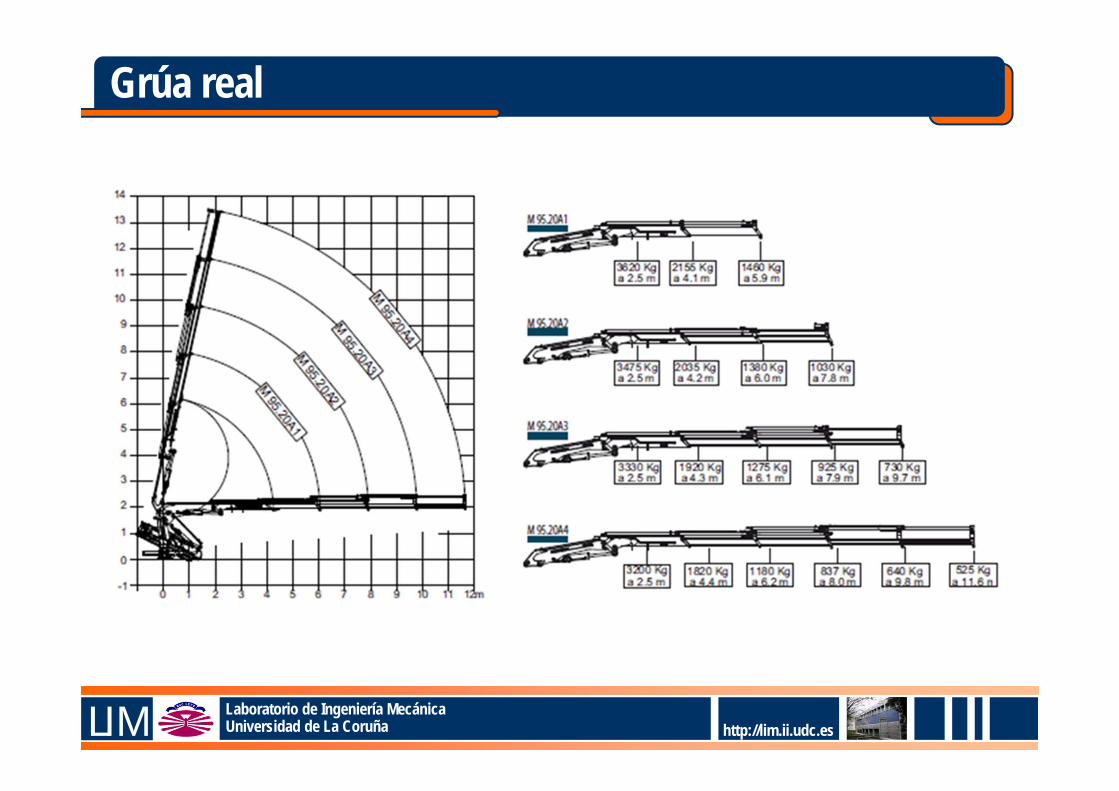
Grúa real
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Grúa real

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Grúa real
[kNm] 88,7[kNm] 124,2[m] 6[º] 415[kNm] 22,4[l] 60[bar] 240[l/min] 35[kW/CV] 14,0/19,0[Kg] 1225
Datos técnicos
Ángulo de giro
Cantidad recomendada de aceite en el depósitoPresión máxima de trabajoCaudal recomendado de la bombaPotencia máxima demandadaPeso de la grúa standard
Momento máximo de giro
Capacidad de elevaciónMomento máximo de elevación dinámicoAlcance hidráulico máximo de la grúa std
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo
Sistema multicuerpo: Modelo de un conjunto de sólidos y sus restricciones.
Dinámica de Sistemas Multicuerpo (Multibody System Dynamics, MBSD): Simulación por ordenador de sistemas multicuerpo.
Ventajas:
Repercute directamente en la calidad y en el coste.
Conocer el comportamiento del producto antes de la fabricación.
Con algoritmos optimizados permite la simulación en tiempo real.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Fases
Fases de la dinámica de sistemas multicuerpo:Modelización:
Propiedades físicas.
Situación en el espacio de los sólidos.
Topología del mecanismo.
Planteamiento e integración numérica de las ecuaciones del movimiento: formulación dinámica.

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
Propiedades físicasMasa.Cdm.Tensor de inercia.
Brazo2Masa(kg)
331,33475Centro de masas(mm)
x y z1032,0300 0,0000 136,4485
Tensor de inercia (kg m2)xx yy zz
10,0551 134,42365 138,1297xy xz yz
0,0000 6,1097 0,0000
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
Coordenadas:Situación del sólido en el espacio y definición de la topología.Variables del problema: aspecto fundamental.Sistema mixto de coordenadas.Naturales:Coordenadas cartesianas de puntos y vectores unitariosDefinición sencilla y sistemática.Facilidad de definición de ecuaciones de restricción.Reducido número de ecuaciones sencillas.
Relativas:Ángulos y distanciasConsideración de fuerzas y momentos en los pares.
INCONVENIENTES: Grado de experiencia para modelizaciones correctas
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
Modelizamos con: 4 entidades:
Definición completa de la posición del sólido en el espacio.
Generar subespacio local.
Matrices de masas constantes.
Evitar dependencias lineales.
Entidades adicionales:
Necesarias para la definición de los pares del mecanismo.
Serán dependencia lineal del subespacio generado.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
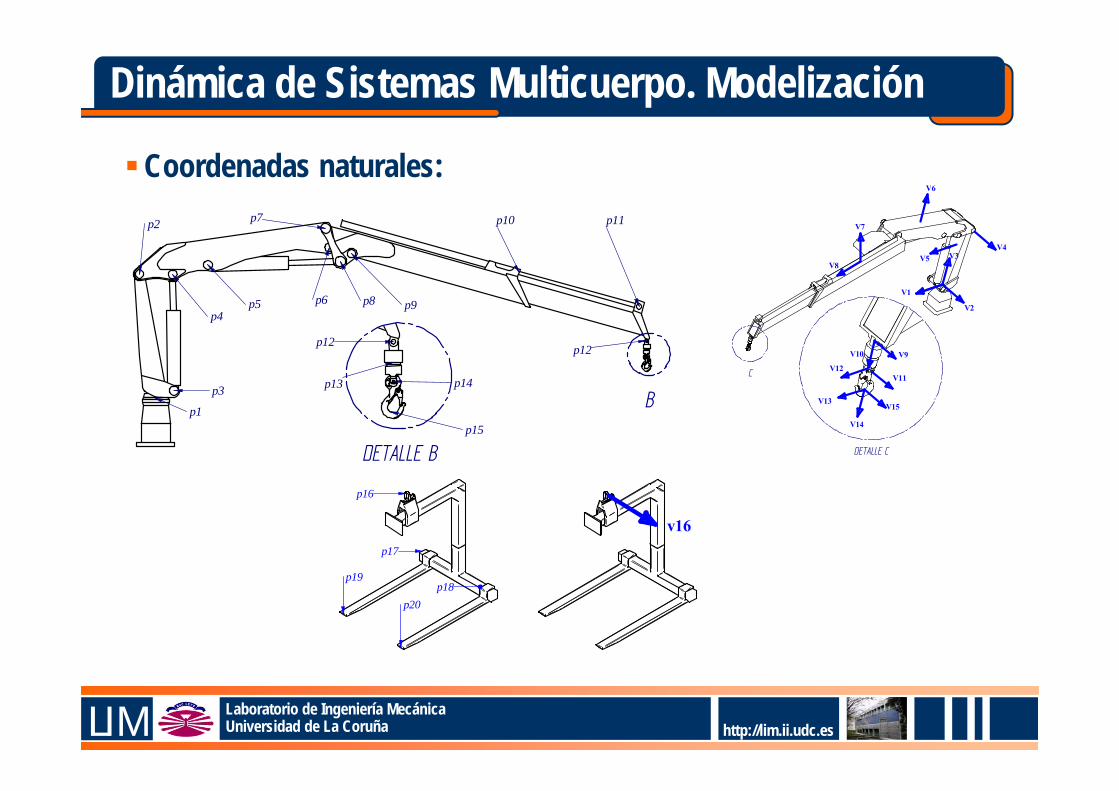
V4
V2
V1
V3V5
V6
V8
V7
C
DETALLE C
V9V10
V11
V14
V15V13
V12
p1
p2
p3
p4p5 p6
p7
p8 p9
p10 p11
p12
B
DETALLE B
p12
p13 p14
p15
Coordenadas naturales:
v16
p16
p17
p18p19
p20
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
Elección de coordenadas relativas Se utilizan en dos casos:
Pares cinemáticos guiados : Los movimientos de la grúa se producen por restricciones.reónomas sobre las coordenadas relativas de los paresguiados.
Pares cinemáticos no guiados explícitamente: Se utilizan para declarar como GDL las variables que losdefinen. Serán guiados por la dinámica del sistema.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
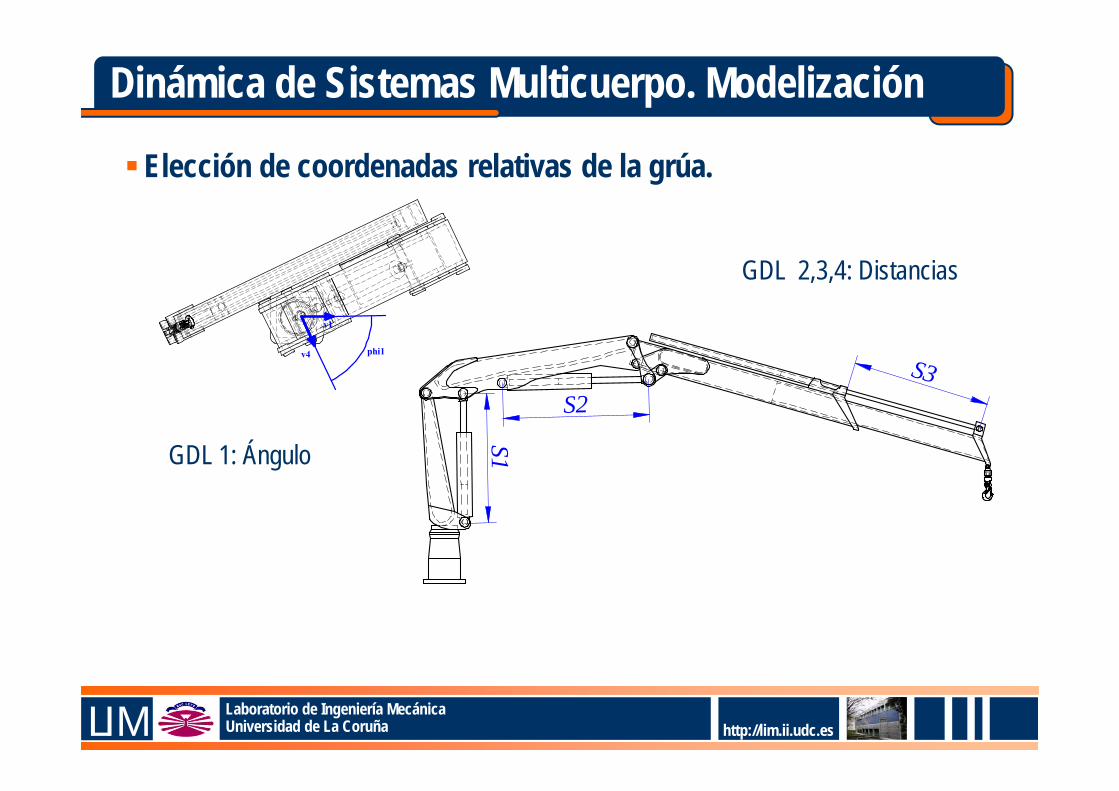
Elección de coordenadas relativas de la grúa.
v1
v4 phi1
S3S2
S1GDL 1: Ángulo
GDL 2,3,4: Distancias
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Dinámica de Sistemas Multicuerpo. Modelización
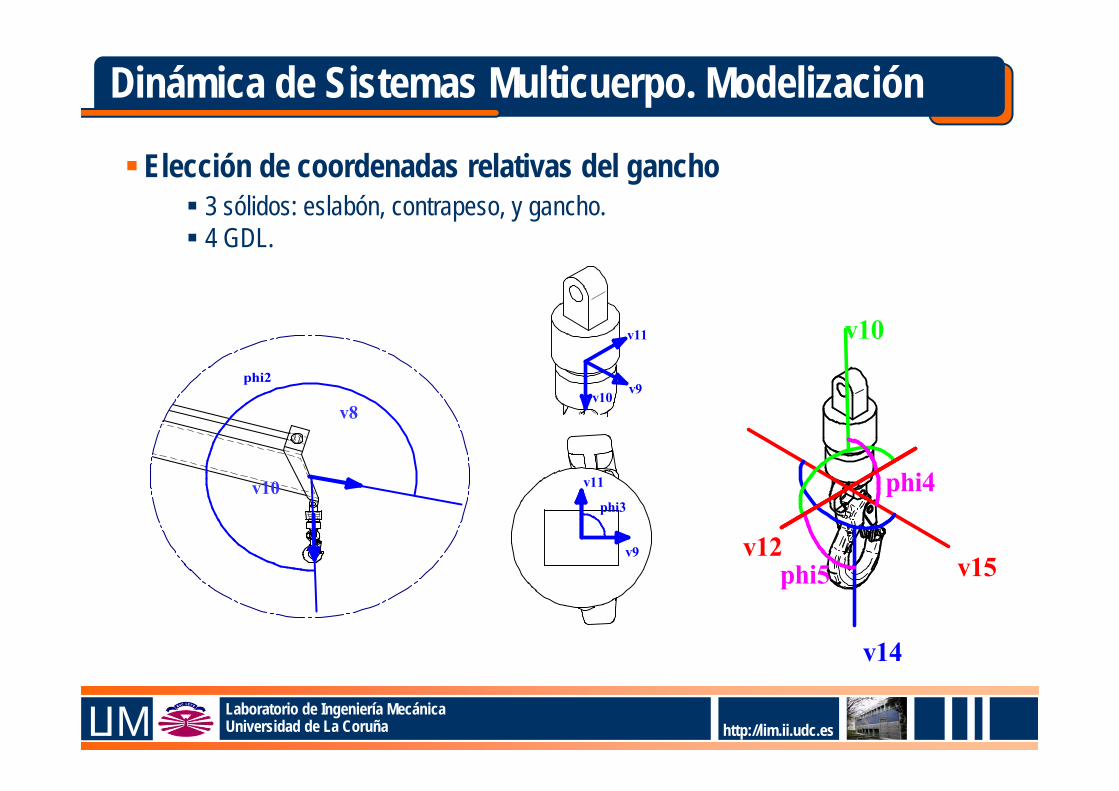
v9v10
v11
Elección de coordenadas relativas del gancho
v15v12
v10
v14
phi4
phi5
phi2
v8
v10
v9
v11
phi3
3 sólidos: eslabón, contrapeso, y gancho. 4 GDL.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
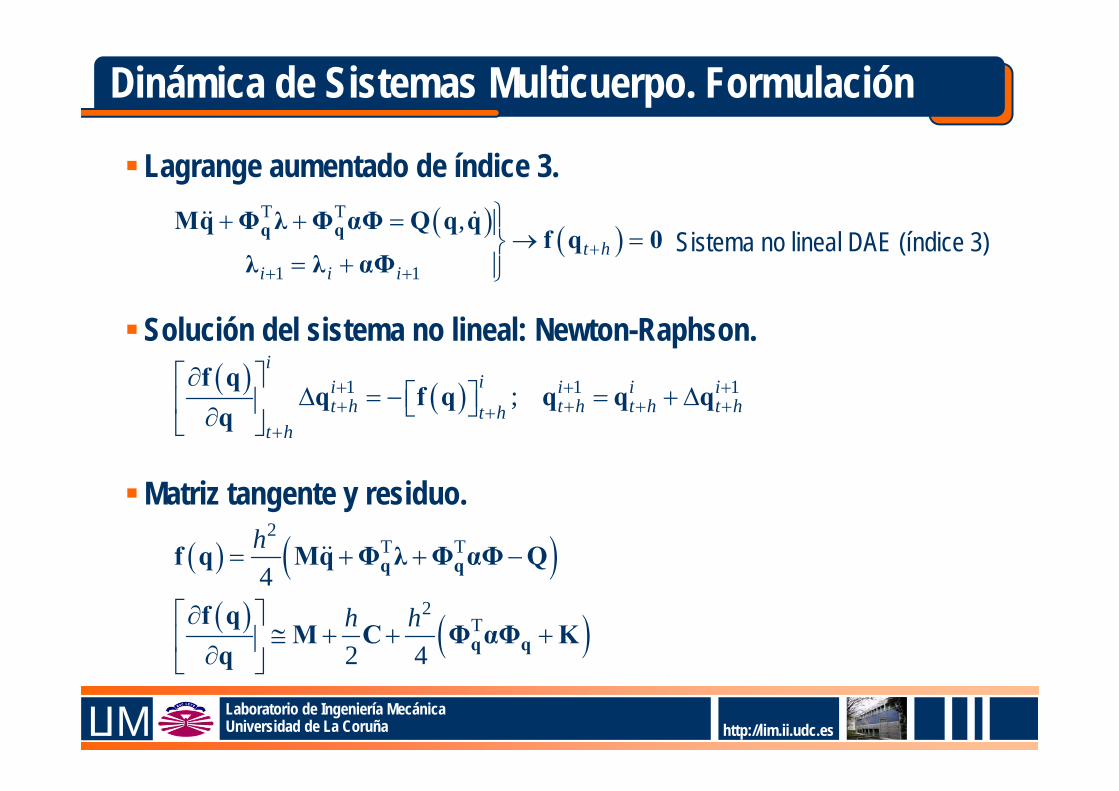
Lagrange aumentado de índice 3.
Solución del sistema no lineal: Newton-Raphson.
Matriz tangente y residuo.
T T
1 1
,t h
i i i
q qMq Φ λ Φ αΦ Q q qf q 0
λ λ αΦ
Sistema no lineal DAE (índice 3)
1 1 1;i
ii i i it h t h t h t ht h
t h
f qq f q q q q
q
2T T
2T
4
2 4
h
h h
q q
q q
f q Mq Φ λ Φ αΦ Q
f qM C Φ αΦ K
q
Dinámica de Sistemas Multicuerpo. Formulación
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
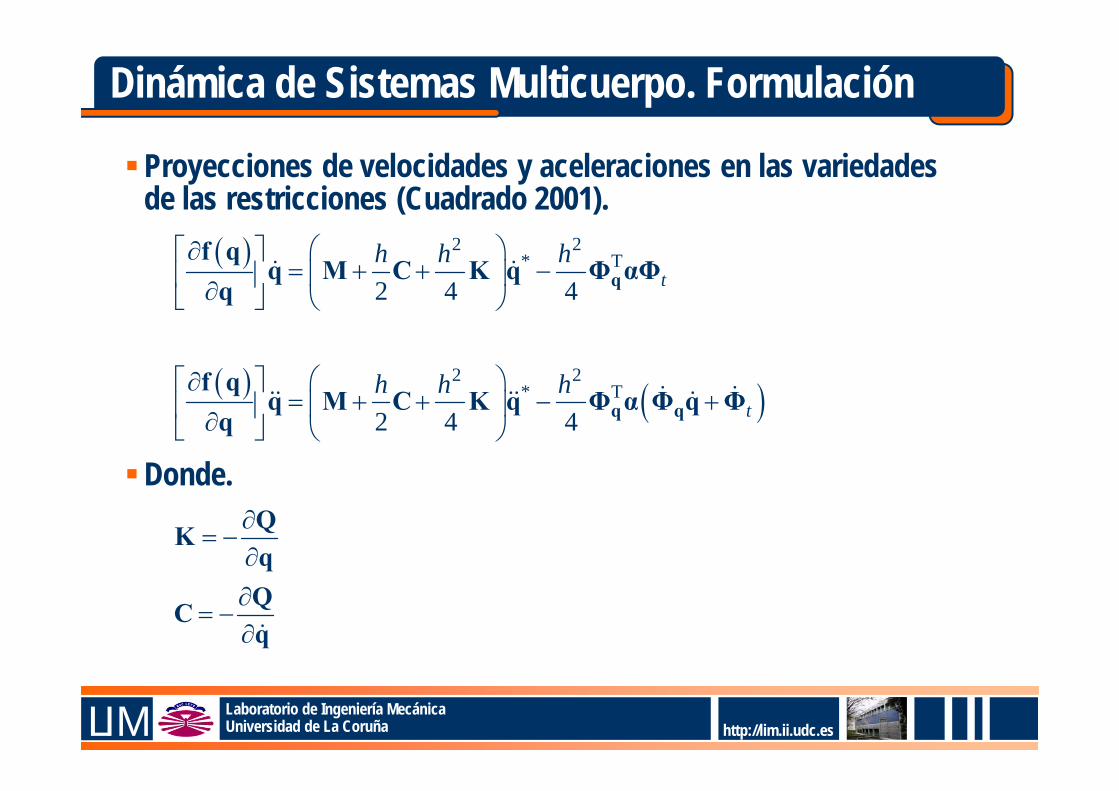
Proyecciones de velocidades y aceleraciones en las variedadesde las restricciones (Cuadrado 2001).
Donde.
2 2* T
2 2* T
2 4 4
2 4 4
t
t
h h h
h h h
q
q q
f qq M C Κ q Φ αΦ
q
f qq M C Κ q Φ α Φ q Φ
q
QΚqQCq
Dinámica de Sistemas Multicuerpo. Formulación
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Software Utilizado
MBSLIMf90SDLOSG
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
MBSLIMF90: Dinámica
Software para la simulación de máquinas y mecanismos en general. Desarrollado por el Laboratorio de Ingeniería Mecánica.
Biblioteca de funciones de Dinámica de sistemas multicuerpo.
Funciones:
Planteamiento de las ecuaciones.
Integración numérica.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
SDL: Lectura de Inputs de Usuario
Simple DirectMedia Layer (SDL). Biblioteca que proporciona un acceso sencillo al audio, teclado, ratón, joysticks y a la tarjeta gráfica vía OpenGL.
Joystick
Control de los actuadores de la grúa.
Control de la alineación del gancho.
Teclado y ratón
Control del paso de tiempo, inicio de la simulación.
Selección de cámaras.
Trackball.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
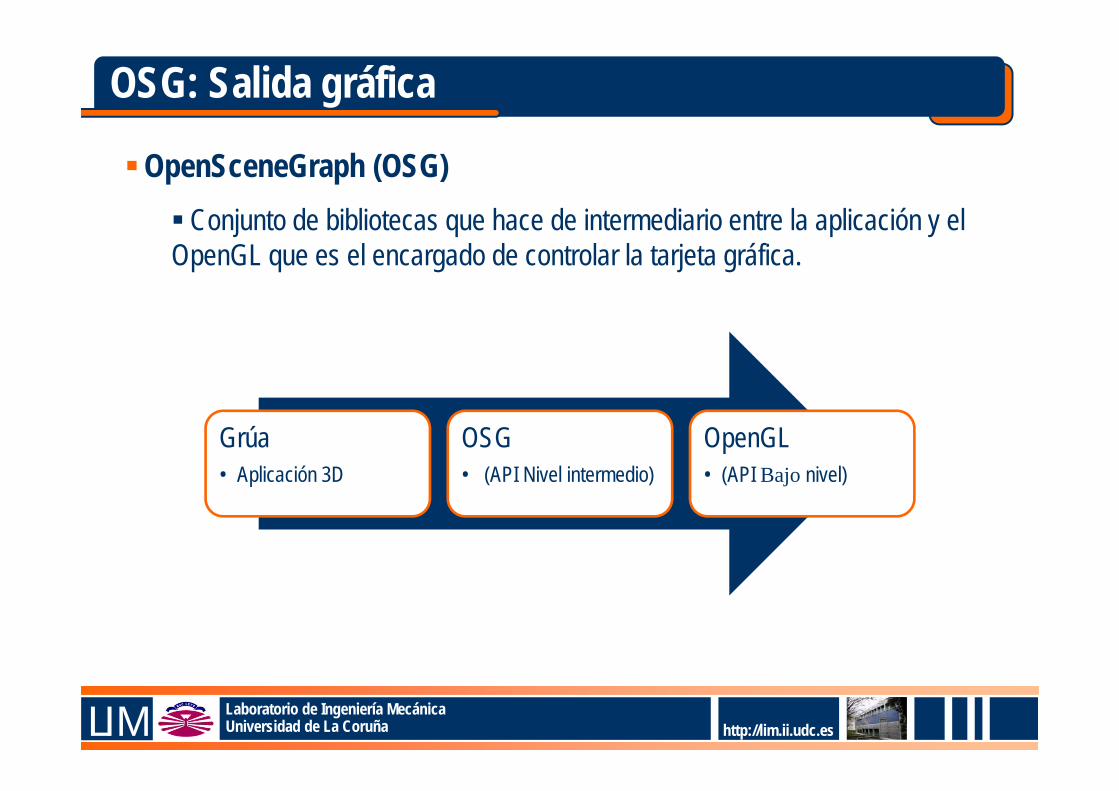
OSG: Salida gráfica
OpenSceneGraph (OSG) Conjunto de bibliotecas que hace de intermediario entre la aplicación y el OpenGL que es el encargado de controlar la tarjeta gráfica.
Grúa• Aplicación 3D
OSG• (API Nivel intermedio)
OpenGL• (API Bajo nivel)
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Conclusiones
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
ConclusionesSe desarrolló un simulador de grúa.Dinámica de gran precisión en tiempo-real.
Human-in-the-loop.
Extraordinaria robustez.
Interfaz de sencillo manejo.
Utilidades: Entrenamiento de operarios.
Diseño.Calculo de curvas de carga. Estimación de esfuerzos.Comprobar prestaciones de la máquina.
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Simulación

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
Simulador de grúa hidráulica para aplicaciones marinas.
Proyecto de fin de carrera.
Autor: Pedro Cobo Beltrán
Tutor: Daniel Dopico Dopico
Enero, 2011
Ingeniería Industrial.
Recommended















![Verónica dopico rces memoria proxecta 2013 2014]](https://img.pdfslide.es/doc/110x75/559363721a28aba3478b475b/veronica-dopico-rces-memoria-proxecta-2013-2014.jpg)

