-
INGENIERIA DE CONTROL I
Anlisis de Respuesta Transitoria y Estacionaria
-
INGENIERIA DE CONTROL I
2
La respuesta en el tiempo de un sistema lineal se divide en dos
partes:
)()()( tytyty st
respuesta transitoria
respuesta estacionaria (rgimen permanente) Va desde el estado
inicial
al estado final
0)(lim
tytt
(tiende a cero cuando el tiempo se hace muy grande. Da idea de
la rapidez del sistema)
depende del sistema y de las condiciones iniciales
La forma en que la salida del sistema se comporta cuando t
(permanece despus que la transitoria ha desaparecido e indica en
donde termina la salida del sistema cuando el tiempo se hace
grande)
depende de la entrada aplicada
)()(lim tyty st
-
INGENIERIA DE CONTROL I
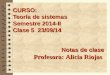
)5)(4)(2(
3)(
ssss
ssY
Ejemplo
G(s) U(s) Y(s)
)5)(4)(2(
3
||
sss
s
Estudiar la respuesta del sistema ante una entrada escaln
unitario: U(s)=1/s
-2 -3 -4 -5
Plano s
j
polo cero
Matlab: pzmap(num,den)
(1/5)
-
INGENIERIA DE CONTROL I
En Matlab:
% definimos el numerador n=[1 3]; % definimos el denominador d =
poly([0 -2 -4 -5]); % definimos un intervalo de tiempo
t=0:0.01:2.5; % obtenemos los residuos y los polos % para expandir
a fracciones parciales [r, p, k]=residue(n,d)
r = 0.1333 -0.1250 -0.0833 0.0750 p = -5.0000 -4.0000 -2.0000 0
k = []
s
d
s
c
s
b
s
a
ssss
ssY
245)5)(4)(2(
3)(
Ejemplo
-
INGENIERIA DE CONTROL I
5
Ejemplo
sssssY
075.0
2
0833.0
4
125.0
5
1333.0)(
075.00833.0125.01333.0)( 245 ttt eeety
Respuesta estacionaria
Transformada de salida
Respuesta de salida en el tiempo
-5
Plano s j
Polo de sistema
-4
Plano s j
Polo de sistema
-2
Plano s j
Polo de sistema
Plano s j
Cero de sistema
-3 0
Plano s j
Polo de entrada
Respuesta transitoria