Control Automático
Compensadores en el dominio de la frecuencia:
Compensador de atraso

Contenido
◼ Introducción
◼ Estrategia
◼ Conceptos
◼ Corrección del error de estado estacionario
◼ Corrección del ancho de banda
◼ Corrección del margen de fase
◼ Ejemplos y ejercicios

Introducción
◼ Se utilizan las gráficas de magnitud y de fase en función de la frecuencia (Bode)
◼ Este método es conveniente cuando tales gráficas son la única fuente disponible de información sobre el comportamiento del sistema
◼ El diseño de sistemas de control utilizando las técnicas de Bode implica determinar y redeterminar los diagramas de magnitud y de fase hasta satisfacer las especificaciones del sistema.
◼ El método implica obtener valores a partir de gráficas, con los errores inherentes a este proceso; por lo que sus resultados son siempre aproximados y los requisitos laxos

Estrategia
◼ Ya que existe interacción entre los diferentes compensadores,
procederemos a escoger una secuencia de cálculo que minimice tal
interacción
◼ Se corregirá primero el error de estado estacionario procurando que la
influencia negativa de esta etapa se mantenga lejos de las frecuencias de
interés para el margen de fase
◼ Se corregirán luego las características dinámicas con un compensador
cuya ganancia a baja frecuencia sea unitaria (0dB) para que no afecte el
error de estado estacionario previamente compensado

Conceptos
Estabilidad: Si la frecuencia de cruce
de la ganancia es menor que la
frecuencia de cruce de la fase (esto
es, cg < cf), entonces el sistema en
lazo cerrado será estable. Esto
equivale a que los márgenes de
ganancia y de fase sean positivos.
Margen de fase = 45°
El sistema es estable en LC
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
Fase (
deg
)
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 45 deg (at 11.8 rad/sec)
Frecuencia [rad/s] (rad/sec)
-80
-60
-40
-20
0
20
40
System: untitled1
Frequency (rad/sec): 17.9
Magnitude (dB): -6.03
System: untitled1
Frequency (rad/sec): 0.012
Magnitude (dB): 25.3
Mag
nit
ud
(d
B)
MF=45°

Conceptos (2)
Ancho de banda: Se define como la frecuencia a la cual la respuesta de magnitud de lazo cerrado es igual a -3dB.
Si usamos una aproximación a un sistema de segundo orden, el ancho de banda BW de lazo cerrado es igual a la frecuencia en la cual la respuesta de magnitud de lazo abierto se encuentra entre -6 y -7.5dB; asumiendo que la fase de lazo abierto se encuentra entre -135º y -225º
Ancho de banda = 17.9 rad/s
Tiempo de subida:
tr 1.8/BW = 1.8/17.9 = 0.1s
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
Fase (
deg
)
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 45 deg (at 11.8 rad/sec)
Frecuencia [rad/s] (rad/sec)
-80
-60
-40
-20
0
20
40
System: untitled1
Frequency (rad/sec): 17.9
Magnitude (dB): -6.03
System: untitled1
Frequency (rad/sec): 0.012
Magnitude (dB): 25.3
Mag
nit
ud
(d
B)
MF=45°
17.9
-6

Conceptos (3)
Error de estado estacionario: El valor
en dB de los coeficientes de error (Kp,
Kv y Ka, dependiendo del tipo de
sistema) se obtienen leyendo la
intersección de la recta en = 1 con la
asíntota de la curva de magnitud a = 0.
KpdB = 25.3 dB
Kp = 18.41
ess =1/(1+Kp)
ess=1/(1+18.41) = 5.15%
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
Fase (
deg
)
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 45 deg (at 11.8 rad/sec)
Frecuencia [rad/s] (rad/sec)
-80
-60
-40
-20
0
20
40
System: untitled1
Frequency (rad/sec): 17.9
Magnitude (dB): -6.03
System: untitled1
Frequency (rad/sec): 0.012
Magnitude (dB): 25.3
Mag
nit
ud
(d
B)
MF=45°
25.3

Conceptos (4)
Tiempo de subida: Es el tiempo
entre el 10% y el 90% del valor
final de la respuesta
tr 1.8/BW
tr 1.8/17.9 = 0.1s
Error de estado estacionario:
ess =1/(1+Kp)
ess=1/(1+18.41)
ess = 5.15%
Respuesta ante escalón
Tiempo [s] (sec)
Am
plitu
d
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
1.2
1.4
System: untitled1
Rise Time (sec): 0.105
System: untitled1
Final Value: 0.948
tr
ess

Relación entre el dominio del tiempo y el de
la frecuencia
◼ Se convierten las especificaciones en el dominio del tiempo a
especificaciones de y n de un sistema prototipo de orden dos.
◼ La especificación de amortiguamiento relativo , se convierte a margen
de fase.
◼ La especificación de frecuencia natural n, se convierte a ancho de
banda.
◼ Dependiendo del tipo de sistema, la especificación de error de estado
estacionario se convierte a un valor de coeficiente de error (KP, KV o Ka)
adecuado.

Resumen de fórmulas
Tipo de sistema 0 1 2
Coeficiente KP KV Ka
eSS
r
nt
8.1
BWn
2
2
ln1
ln
+
=
M
M
60 MF ,100
MF
n
St
4%2
P
SSK
Ae
+=
1 V
SSK
Ae =
a
SSK
Ae =

Corrección del error de estado estacionario
◼ Una vez determinada la ganancia de baja frecuencia necesaria para corregir el error de estado estacionario, se tiene la posibilidad de aplicarla de tres formas:
◼ Ganancia estática
◼ Usualmente disminuye el margen de fase y aumenta el ancho de banda. También amplifica el ruido de alta frecuencia.
◼ Compensador de atraso
◼ Se comporta como un filtro pasa-bajas. Su influencia negativa en el margen de fase y ancho de banda puede minimizarse
◼ Compensador de atraso + ganancia estática

Corrección del error de estado estacionario
con K estática
◼ Generalmente es usada cuando se desea corregir el error de estado estacionario y además aumentar el ancho de banda; o no se pueden medir el ancho de banda y el margen de fase (no tenemos cruce ganancia a 0dB)
◼ Como la ganancia afecta todas las frecuencias, la gráfica de magnitud sube (para ganancias mayores que la unidad) o baja, sin afectar su forma o la fase.
◼ Se debe de tomar en cuenta que aumentar la ganancia estática usualmente disminuye el margen de fase; así que debemos eventualmente aplicar una corrección a éste.
◼ Se aplica la ganancia K sumando su valor en dB (20*log10 K [dB]) a la escala de magnitud. Por ejemplo, si K se aumenta en 10, a la escala de magnitud debe sumársele +20dB.
◼ Se obtienen nuevos valores para el ancho de banda y el margen de fase

Corrección del eSS con un compensador de
atraso
◼ Generalmente se usa cuando no se desea afectar el ancho de banda o
el margen de fase
◼ Se ubica el cero del compensador y luego se calcula el polo a través de la
relación K = z/p, donde K es la ganancia deseada de esta etapa.
◼ Para disminuir su influencia negativa el cero se ubica, dependiendo del tipo
de sistema:
◼ Tipo 0: En un valor menor a la frecuencia en la cual la fase alcanza -45°.
◼ Tipo 1 y superior: En un valor muy cercano a frecuencia cero, formando un
dipolo con el polo.

Fórmulas del compensador de atraso
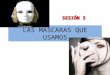
El compensador de atraso tiene
ganancia alta a bajas frecuencias.
La ganancia es unitaria en altas
frecuencias (las frecuencias de
cruce de ganancia)
1 ;1
11)(
+
+= a
Tj
aTj
ajKLAG
1/T- p T,1/- z 1, ;
)1
(
)1
(
)(
)()( 00
0
0 ==
+
+
=−
−= aa
Ts
aTs
ps
zssKLAG
ajKtK LAG
jLAG
t
1)(lim)(lim
0==
→→
1)(lim)(lim0
==→→
jKtK LAGj
LAGt

Gráficas de Bode del compensador de atraso
0
5
10
15
20
Mag
nit
ud
(d
B)
Diagrama de Bode
Frecuencia normalizada = w*a*T (rad/sec)
10-3
10-2
10-1
100
101
102
-60
-30
0
Fase (
deg
)
a=0.1
a=0.1
a=0.5
a=0.5
a=0.3
a=0.3

Corrección del eSS con una combinación K
+ comp. atraso
◼ Se usa cuando se requiere aumentar el ancho de banda; pero no afectar demasiado el margen de fase
◼ Se divide la ganancia total en dos partes:
◼ Una ganancia estática suficiente para ubicar el ancho de banda o margen de fase en el valor deseado
◼ El resto de la ganancia se aplica como compensador de atraso
◼ Para cada parte se usa la técnica descrita antes

Ejemplo 1: Descripción
Dado el sistema
cuya gráfica de bode se muestra en la siguiente figura, haga que:
◼ El error de estado estacionario debe ser menor que o igual a /10 rad/s, cuando la entrada es una rampa con pendiente 2 rad/s
◼ Resuelva usando ganancia estática y compensador de atraso. Compare los resultados
G s H ss s s
( ) ( )( )( )
=+ +
24
2 6H s( ) = 1

Ejemplo 1: Usando K estática
21
1 10 20
6
=
=
+
vK
vK dB
dB
20
)10/(
2
)10/(
2
2
=
V
V
K
AK
𝐾𝐶 =𝐾𝑉2𝐾𝑉1
=20
2= 10
𝐾𝐶[𝑑𝐵] = 20 dB
−= 20FM
El margen de fase será negativo,
por lo que debe mejorarse mucho
-40
-30
-20
-10
0
10
20
30
Mag
nit
ud
(d
B)
10-1
100
101
-225
-180
-135
-90
Fase (
deg
)
Diagrama de Bode
Gm = 12 dB (at 3.46 rad/sec) , Pm = 38.1 deg (at 1.54 rad/sec)
Frecuencia [rad/s] (rad/sec)
MF
MG
6
MF’
38°
12dB
Tangente a = 0
Recta ⊥ a = 1
0db
-20db
40db
BWde Aumento

-40
-20
0
20
40
60
80
100
Mag
nit
ud
(d
B)
10-4
10-3
10-2
10-1
100
101
-225
-180
-135
-90
-45
0
Fase (
deg
)
Diagrama de Bode
Frecuencia (rad/sec)
Compensado
Compensador
Original
Ejemplo 1: Usando compensador de atraso
21
1 10 20
6
=
=
+
vK
vK dB
dB
20
)10/(
2
)10/(
2
2
=
V
V
K
AK
102
20
1
2 ===V
VC
K
KK
001.0
1001.0
10
−=
=−=
==
p
pz
p
zKC
( )( )001.0
01.0)(
+
+=
s
ssKlag

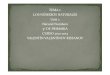
Ejemplo 1: K + Klag(s)
KT = 20dB
KT = K*z/p=10
Kc = 3.16 (10dB)
z/p= 3.16 (10dB)
-100
-50
0
50
100
Mag
nit
ud
(d
B)
10-3
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Fase (
deg
)
Diagrama de Bode
Frecuencia (rad/sec)
Original
Compensado
00316.0
16.301.0
16.3
−=
=−=
=
p
pz
p
z
( )( )
)(
)(
0
0
00316.0
01.016.3)(
ps
zsK
lag
C
s
ssK
−
−
+
+=
ฏAumento de BW

Ejemplo 1: Análisis de resultados
◼ Al utilizar solo ganancia estática, un sistema estable, con margen de fase positivo, eventualmente se vuelve inestable (MF’ = -20°)
◼ Al utilizar un compensador de atraso, correctamente ajustado, no se afecta ni el ancho de banda ni se afecta el margen de fase. Las frecuencias de cruce de ganancia y fase permanecen invariables
◼ Escogiendo adecuadamente el dipolo, el atraso de fase introducido discurre en frecuencias muy por debajo de las frecuencias de interés para BW y MF.
◼ Utilizando una combinación de ganancia y compensador de atraso se pueden evitar muchos de los efectos negativos de la ganancia estática y modificar (aumentar) el ancho de banda

Referencias
[1] Ogata, Katsuhiko. „Ingeniería de Control Moderna“, Pearson, Prentice Hall, 2003, 4ª Ed., Madrid.
[2] Kuo, Benjamin C.. „Sistemas de Control Automático“, Ed. 7, Prentice Hall, 1996, México.
[3] Dorf, Richard, Bishop Robert. „Sistemas de control moderno“, 10ª Ed., Prentice Hall, 2005, España
Recommended