E
scue
la P
olité
cnic
a S
uper
ior d
e Ja
én
Grad
o en I
ngen
iería
Geom
ática
y To
pogr
áfica
UNIVERSIDAD DE JAÉN Escuela Politécnica Superior (Jaén)
Trabajo Fin de Grado
TÉCNICAS GEOMÁTICAS APLICADAS A LA
MONITORIZACIÓN DE FENÓMENOS DE
INESTABILIDAD DE LADERAS Alumno: Ana Maria Buzdugan
Tutor: Prof. D. José Luis Pérez García Prof. D. Javier Cardenal Escarcena
Dpto: Ingeniería Cartográfica, Geodésica y Fotogrametría
Noviembre, 2014

Universidad de Jaén
Escuela Politécnica Superior de Jaén Departamento de Informática
Don JOSÉ LUIS PÉREZ GARCÍA y Don JAVIER CARDENAL ESCARCENA , tutores del Proyecto Fin de Carrera titulado: TÉCNICAS GEOMÁTICAS APALICADAS A LA MONITORIZACIÓN DE FENÓMENOS DE INESTABILIDAD DE LADERAS, que presenta ANA MARIA BUZDUGAN, autoriza su presentación para defensa y evaluación en la Escuela Politécnica Superior de Jaén.
Jaén, NOVIEMBRE de 2014
El alumno: Los tutores:
ANA MARIA BUZDUGAN JOSÉ LUIS PÉREZ GARCÍA JAVIER CARDENAL ESCARCENA

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Contenido
1. INTRODUCIÓN ......................................................................................................... 8
1.1. JUSTIFICACIÓN .................................................................................................................................... 9
1.2. OBJETIVO ............................................................................................................................................ 10
1.3. ANTECEDENTES .............................................................................................................................. 12
1.4. ESTRUCTURA DEL PROYECTO .................................................................................................. 14
2. PROCESO METODOLÓGICO Y APLICACIÓN PRÁCTICA ...................... 15
2.1. SITUACIÓN Y DESCRIPCIÓN DE LA ZONA ............................................................................ 17
2.2. DEFINICIÓN DEL SISTEMA DE REFERENCIA (SR) ............................................................ 18
2.2.1. Estudio de incertidumbre a priori .................................................................................. 18
2.2.2. Observación de los puntos de apoyo ............................................................................. 22
2.2.3. Procesado de los datos ........................................................................................................ 23
2.2.4. Estudio de incertidumbres a posteriori ....................................................................... 28
2.3. INSTRUMENTACIÓN Y SOFTWARE ......................................................................................... 30
2.3.1. Instrumentación ..................................................................................................................... 30
2.3.2. Software ..................................................................................................................................... 38
2.4. UAV ........................................................................................................................................................ 41
2.4.1. Planificación del vuelo ......................................................................................................... 41
2.4.2. Planificación de la red de apoyo ...................................................................................... 50
2.4.3. Ejecución del vuelo mediante UAV ................................................................................. 51
TRATAMIENTO DE LOS DATOS .......................................................................................................... 56
2.4.4. Orientación del bloque fotogramétrico ........................................................................ 56
2.4.5. Generación de la nube de puntos .................................................................................... 59
2.4.6. Elaboración de los MDEs de la zona afectada ............................................................ 60
2.5. TLS. ........................................................................................................................................................ 66
2.5.1. Planificación ............................................................................................................................. 66
2.5.2. Planificación de la Red de Apoyo .................................................................................... 67
2.5.3. Ejecución de la toma de datos .......................................................................................... 67
2.5.4. Orientación mediante Maptek I-Site de los datos escaner ................................... 69
3

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.5.5. Elaboración de los MDEs mediante técnica TLS ..................................................... 73
3. ANÁLISIS DE LOS RESULTADOS ................................................................... 76
3.1. CONTROL DE LA CAPTURA DE LA INFORMACIÓN ........................................................... 77
3.1.1. UAV .............................................................................................................................................. 77
3.1.2. TLS ............................................................................................................................................... 81
3.2. CONTROL DEL PROCESO DE ORIENTACIÓN ....................................................................... 82
3.2.1. UAV .............................................................................................................................................. 82
3.2.2. TLS ............................................................................................................................................... 83
3.3. CONTROL DE SUPERFICIES ........................................................................................................ 84
3.3.1. UAV .............................................................................................................................................. 84
3.3.2. TLS ............................................................................................................................................... 84
3.4. ANÁLISIS MULTITEMPORAL DE LAS DISTINTAS CAMPAÑAS .................................... 86
3.4.1. Análisis de la deformación comparando Modelos superficiales ........................ 86
3.4.2. Cuantificación de la deformación a partir de cálculo de volúmenes ................ 89
3.5. ANÁLISIS MULTIFUENTE ............................................................................................................ 91
3.5.1. Captura ....................................................................................................................................... 91
3.5.2. Orientación ............................................................................................................................... 91
3.5.3. Nube de Puntos ....................................................................................................................... 93
3.5.4. Modelos Superficiales .......................................................................................................... 95
3.5.5. Análisis de viabilidad ........................................................................................................... 97
4. CONCLUSIONES .................................................................................................... 98
4.1. CONCLUSIONES DE LAS TÉCNICAS EMPLEADAS .............................................................. 99
4.2. CONCLUSIONES DE LOS RESULTADOS ............................................................................... 101
ANEXOS ........................................................................................................................ 103
BIBLIOGRAFÍA ........................................................................................................... 105
4

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Índice de Figuras
Figura 1. Estructura del Proyecto ................................................................................................ 14 Figura 2. Distribución de las hojas del mapa topográfico nacional ............................................ 17 Figura 3. Ubicación de la zona de estudio ................................................................................... 17 Figura 4. Observación de los puntos de control .......................................................................... 24 Figura 5. Subunidades del sistema de vuelo ASTEC FALCON 8 .................................................... 30 Figura 6. Cámara Sony Nex-5 ...................................................................................................... 31 Figura 7. Componentes de la estación de control remoto .......................................................... 32 Figura 8. Técnicas de medición en las que se basa el láser ......................................................... 34 Figura 9. Principio de un escáner basado en el tiempo de vuelo ................................................ 35 Figura 10. Optech Ilris 3D ............................................................................................................ 36 Figura 11. Fundamento de escaneo del Optech Ilris 3D .............................................................. 36 Figura 12. Escáner Leica C10 ....................................................................................................... 37 Figura 13. Sistema Astec Falcon 8 ............................................................................................... 41 Figura 14. Posición de los disparos en la pasada cenital según cálculos .................................... 44 Figura 15. Toma cenital primera propuesta ................................................................................ 45 Figura 16. Toma cenital segunda propuesta ............................................................................... 46 Figura 17. Toma cenital tercera propuesta ................................................................................. 47 Figura 18. Planificación de la misión de vuelo para la toma cenital con UAV ............................ 48 Figura 19. Propuesta toma inclinada .......................................................................................... 49 Figura 20. Ejecución de la toma inclinada con UAV .................................................................... 49 Figura 21. Interfaz AscTec AutoPilot Control_Pasada Cenital .................................................... 52 Figura 22. Interfaz AscTec AutoPilot Control_Pasada Inclinada ................................................. 53 Figura 23. Pasadas Cenitales ...................................................................................................... 55 Figura 24. Pasadas Inclinadas ..................................................................................................... 55 Figura 25. Puntos correlados en el proceso de orientación relativa ........................................... 57 Figura 26. Situación de los Puntos de Control fotogramétricos .................................................. 58 Figura 27. Nube de puntos generada por técnica fotogramétrica ............................................. 60 Figura 28. Clasificación de la superficie ...................................................................................... 61 Figura 29. Modelado de la superficie .......................................................................................... 62 Figura 30. Edición con Socet Set .................................................................................................. 63 Figura 31. MDT obtenido mediante técnica fotogramétrica ...................................................... 64 Figura 32. Clasificación de la vegetación .................................................................................... 65 Figura 33. Deformaciones según el ángulo de toma del escáner ............................................... 66 Figura 34. Posición del escáner con respecto a la ladera ............................................................ 69 Figura 35. Posición de las estaciones de escaneo respecto de la ladera..................................... 69 Figura 36. Origen SR local del escáner ........................................................................................ 70 Figura 37. MDT obtenido por técnica TLS ................................................................................... 74 Figura 38. Clasificación del terreno mediante técnica TLS .......................................................... 75 Figura 39. Modelo diferencial TLS20140429-TLS20141021 ........................................................ 87 Figura 40. Histograma de la deferencia de MDS TLS ................................................................. 87 Figura 41. Modelo diferencial UAV20140429_UAV201402 ........................................................ 88 Figura 42. Histograma de las diferencias entre MDS UAV .......................................................... 89 Figura 43. Zonas que presentan error en orientación ................................................................. 93
5

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 44. Nube de puntos obtenida con técnicas TLS ................................................................ 94 Figura 45. Nube de puntos obtenida mediante técnicas fotogramétricas .................................. 95 Figura 46. Comparativa MDS procedentes de TLS y UAV ........................................................... 96 Figura 47. Histograma comparativo TLS y UAV .......................................................................... 96 Figura 48. Rugosidad de los MDS obtenidos por TLS vs UAV ..................................................... 97
6

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Índice de Tablas
Tabla 1. Características técnicas Leica AX 1203 .......................................................................... 19 Tabla 2. Desviación típica de los puntos medidos mediante técnica G.N.N.S ............................. 25 Tabla 3. Características técnicas de los equipos GNNS Leica System 1200 ................................ 37 Tabla 4. Parámetros de vuelo según la distancia de vuelo (en rojo se marca la altura de vuelo seleccionada) ............................................................................................................................... 43 Tabla 5. Parámetros de vuelo calculados para la pasada inclinada ........................................... 48 Tabla 6. Simulación tamaño dianas ............................................................................................ 51 Tabla 7. Precisión de los Puntos de control en el modelo orientado ........................................... 58 Tabla 8. Precisión de los puntos de chequeo ............................................................................... 72 Tabla 9. Datos planificados ......................................................................................................... 78 Tabla 10. POE resultados tras la orientación del bloque ............................................................ 79 Tabla 11. Diferencias y variaciones de los datos de vuelo .......................................................... 81 Tabla 12. Valores estadísticos de los PC, en el ajuste del bloque fotogramétrico ...................... 82 Tabla 13. Valores estadísticos de los puntos de chequeo TLS ..................................................... 83 Tabla 14. Control Superficie UAV ................................................................................................ 84 Tabla 15. Control Superficie TLS .................................................................................................. 84 Tabla 16. Diferencias volumétricas entre superficies TLS ........................................................... 90 Tabla 17. Diferencias volumétricas entre superficies UAV .......................................................... 90
7

1. INTRODUCIÓN

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
1.1. JUSTIFICACIÓN
La aparición en los últimos años de nuevas tecnologías en el ámbito de la
geomática aporta grandes ventajas en la captura de datos frente a las técnicas clásicas
empleadas tradicionalmente. Se consigue la adquisición de gran cantidad de datos con
elevado nivel de detalle en cortos periodos de tiempo.
En el presente proyecto se emplearán técnicas de fotogrametría digital y de escáner
láser terrestre para la monitorización y evaluación de un caso práctico de fenómenos de
inestabilidad de laderas. El empleo y disposición de ambas metodologías va a permitir
la fusión de las mismas así como realizar una comparación entre los resultados
obtenidos. Si se dispone de toma de datos en distintos instantes de tiempo posibilita la
realización de trabajos de análisis multitemporal y evolutivos, estudiando fenómenos a
lo largo del tiempo cualquiera que sea su origen.
La fotogrametría digital mediante el empleo de UAV (Unmanned Aerial Vehicle),
permite la captura de datos (imágenes) con una gran resolución y abre un gran abanico
de posibilidades para la explotación de imágenes y generación automática de nubes de
puntos tridimensionales con buena precisión espacial. Manipulando estos puntos se
obtienen modelos digitales de terreno y productos fotogramétricos.
Por otro lado, el escáner láser terrestre o TLS, siglas en inglés de Terrestrial Laser
Scanner, posee una alta capacidad de captura de datos 3D en un corto periodo de
tiempo. Sus ventajas más destacadas son: la observación directa del terreno, la
precisión, rentabilidad y la rapidez con la que se toman gran cantidad de datos.
9

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
1.2. OBJETIVO
El objetivo del presente trabajo es monitorizar y evaluar los fenómenos de
inestabilidad de una ladera mediante el uso de técnicas geomáticas basadas en técnicas
fotogramétricas y de escáner láser terrestre.
Con la realización de este proyecto se pretende sintetizar y poner en práctica los
conocimientos y competencias adquiridas durante la carrera, especialmente relativas a la
planificación y materialización de redes de apoyo, planificación y ejecución de vuelos
fotogramétricos, planificación y toma de datos con TLS, tratamiento de los datos,
mediante los correspondientes procesos asociados a cada una de las técnicas y
monitorización de deformaciones mediante combinación de técnicas geomáticas.
La zona objeto de estudio se sitúa en el P.K. 59 de la autovía Bailén-Motril (salida
de Cambil), en la que se han identificado importantes movimientos de ladera desde la
construcción de la citada autovía, y cuya dinámica se ha acentuado por las condiciones
climatológicas reinantes en el año 2013, con numerosos periodos de fuerte lluvias.
Se pretende realizar un análisis multitemporal, comparando los resultados
obtenidos en la campaña observada para la aplicación del presente proyecto con los
obtenidos en una campaña anterior facilitada por el grupo de investigación “TEP-213”.
A partir de este estudio multitemporal se pretenden evaluar los cambios sucedidos
durante el periodo de estudio. Además, dado que los datos son procedentes de distintas
técnicas se obtienen distintos resultados y se procede a la comparativa de dichos
resultados así como a la evaluación práctica y económica de la solución adoptada.
También se plantean una serie de objetivos secundarios que corresponden a las
fases intermedias del proyecto:
• Planificación y captura de los datos.
• Diseño, medición y compensación de la red de puntos de apoyo en la zona de
estudio para dotar con coordenadas oficiales el proyecto.
• Orientación del bloque fotogramétrico, mediante parámetros de orientación
externa.
• Orientación de los datos TLS.
• Obtención de productos a partir de los datos obtenidos por las distintas
técnicas.
10

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
• Obtención de productos multitemporales.
• Comparativa y análisis de los resultados obtenido.
11
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
1.3. ANTECEDENTES
Las técnicas en geomática representan una herramienta importante en el estudio
multitemporal de los fenómenos al que está sometido el terreno en el tiempo. Se
obtienen modelos de la realidad de las zonas objeto de estudio, suficientemente precisos
como para determinar la morfología del terreno y los elementos que se encuentren sobre
el mismo.
Los estudios multitemporales y multitécnica son posibles debido a la recopilación
de gran cantidad de datos en formato digital para su posterior tratamiento y análisis.
Es muy frecuente combinar técnicas geomáticas que integran conjuntos de datos
provenientes de diferentes sistemas de adquisición en una misma aplicación. Para ello
es necesario que estos datos sean compatibles e interoperables, esto es, que se
encuentren referidos al mismo sistema de referencia y en formato adecuado.
Existe un gran número de trabajos relacionados con el uso combinado de
fotogrametría digital y escáner laser terrestre, la mayoría son dedicados a riesgos
naturales y estudios medioambientales:
• Procesos Naturales: fenómenos que actúan desde el interior de la tierra,
procesos que actúan en su superficie y bióticos (causados por seres vivos).
• Procesos causados por la actividad humana.
Otros trabajos dedicados a estudiar fenómenos en el tiempo serían: evolución de
usos del suelo, control de deformaciones, evolución de la superficie de la corteza
terrestre debido a factores de diferente origen (climático, actividad humana, etc.),
estudio de zonas inestables. Concretamente en este trabajo se emplea la combinación de
ambas técnicas para monitorizar fenómenos de inestabilidad de laderas, estimando la
deformación horizontal y vertical del terreno.
En conclusión, en la actualidad existen diferentes líneas de investigación en este
aspecto:
• Detección y cuantificación de cambios morfológicos.
• Monitorización de desplazamientos de laderas.
• Análisis multitemporal de zonas costeras.
• Modificación del terreno debido a desastres naturales.
• Estudios forestales. Etc.
12

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Dado que el empleo de los dispositivos UAV es un sector emergente que cuenta
con un importante plan de empresas e instituciones españolas e internacionales que
prestan servicios e investigan su utilización para fines comerciales, el gobierno se ha
visto obligado a legislar el uso de los mismos mediante el Real Decreto 8/2014, de 4 de
julio.
13
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
1.4. ESTRUCTURA DEL PROYECTO
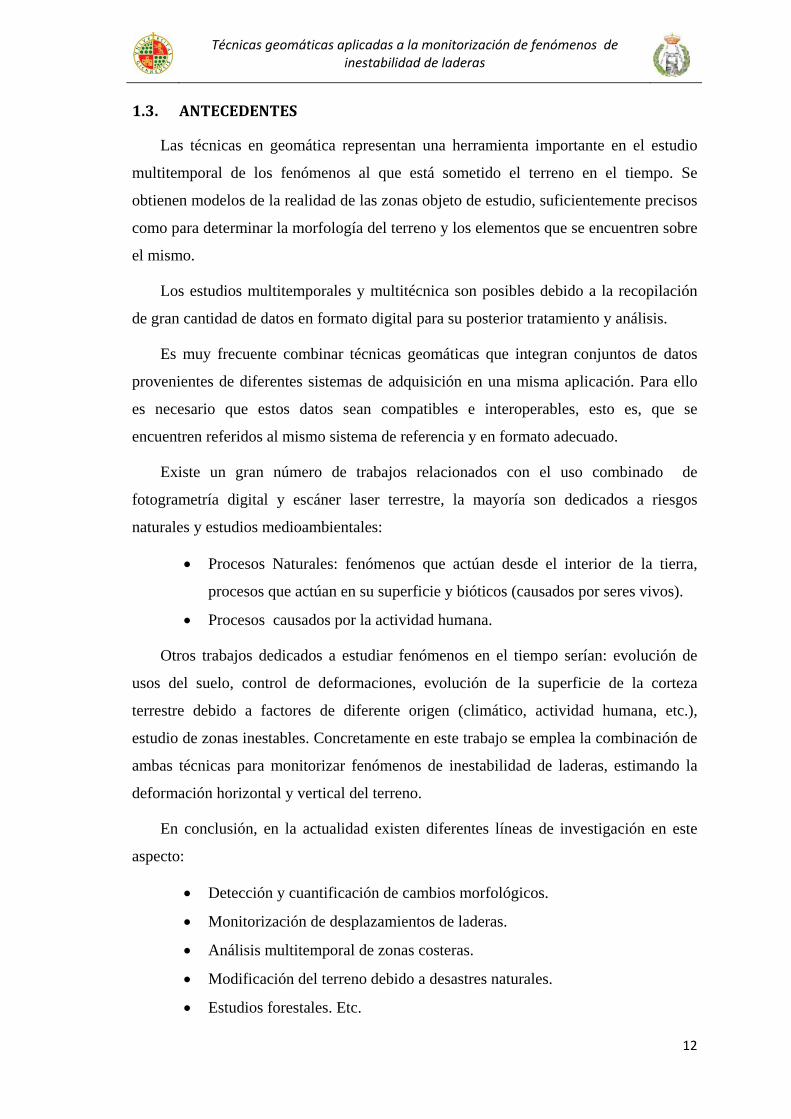
El presente proyecto se encuentra organizado en 4capítulos más los anejos, en los
que se detalla con claridad las diferente etapas del proyecto (ver Figura 1).
Figura 1. Estructura del Proyecto
En el primer capítulo se presentan los objetivos de este proyecto, se justifica la
metodología y técnicas adoptadas así como los antecedentes y la propia estructura del
proyecto.
En el segundo capítulo se detalla todo el proceso que se lleva a cabo en este
proyecto, desde la selección de la zona objeto de estudio, instrumentación empleada en
la captura de datos, tratamiento y análisis de los datos hasta la obtención de los
resultados.
En el tercer capítulo se realiza un análisis multitécnica y multitemporal de los
resultados obtenidos.
En el cuarto capítulo se extraen las conclusiones sobre las técnicas empleadas.
Los anexos que se incluyen en el proyecto detallan los resultados de los cálculos
realizados para el desarrollo del mismo.
14
2. PROCESO METODOLÓGICO Y APLICACIÓN PRÁCTICA

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
La metodología propuesta, como ya se ha mencionado, tiene como objetivo
monitorizar la actividad de movimientos de ladera realizando para ello un análisis
multitemporal. Además, se estudia la viabilidad de combinar ambas técnicas, así como
plantear varías posibilidades de planificación de vuelo para este tipo de terreno con gran
pendiente.
Los pasos seguidos en el desarrollo y aplicación de la metodología se indican a continuación:
• Situación y descripción de la zona de estudio.
• Selección del sistema de referencia a emplear para controlar la deformación
• Planificación del trabajo: diseño de vuelo fotogramétrico y de la red de
apoyo mediante técnicas GNSS.
• Ejecución del vuelo mediante UAV con cámara digital incorporada.
• Ejecución de campaña de escáner láser.
• Orientación del vuelo fotogramétrico.
• Orientación mediante Maptek I-Site de los datos tomados con escáner láser.
• Elaboración de modelos digitales del terreno de la zona afectada.
• Reorientación si se procede. Comparación con campañas anteriores.
• Estudio de deformaciones
• Evaluación práctica y económica de la solución adoptada.
16
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
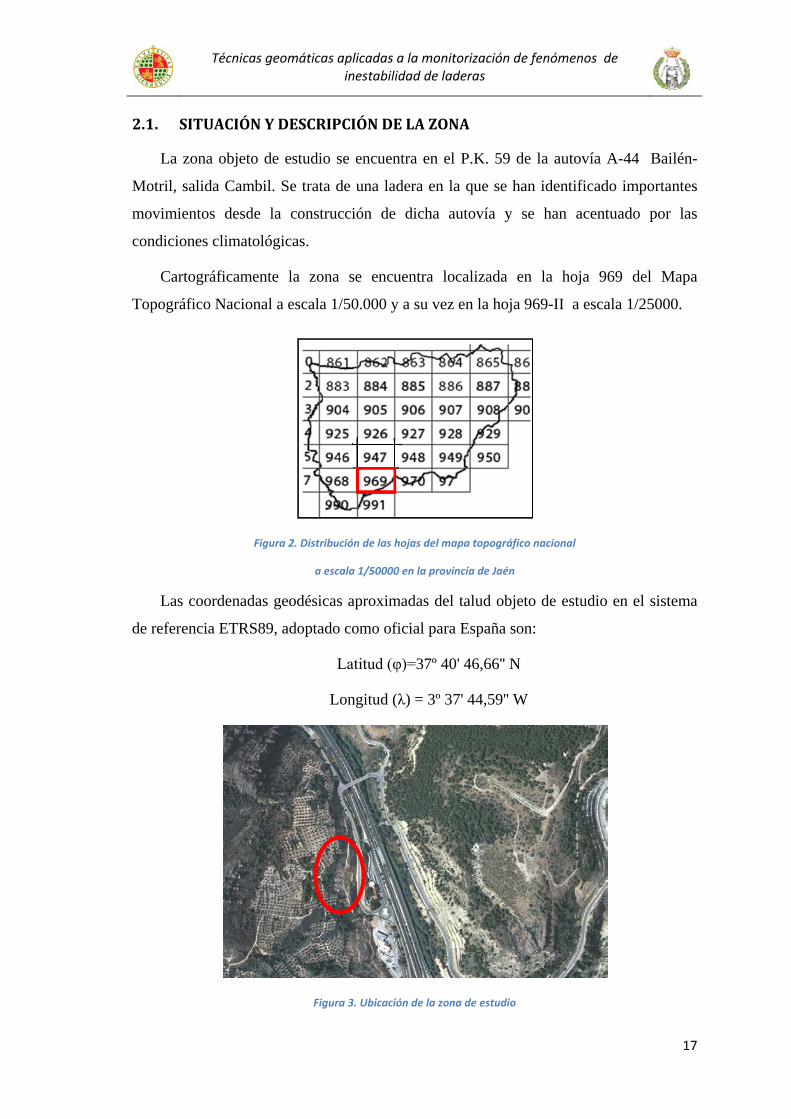
2.1. SITUACIÓN Y DESCRIPCIÓN DE LA ZONA
La zona objeto de estudio se encuentra en el P.K. 59 de la autovía A-44 Bailén-
Motril, salida Cambil. Se trata de una ladera en la que se han identificado importantes
movimientos desde la construcción de dicha autovía y se han acentuado por las
condiciones climatológicas.
Cartográficamente la zona se encuentra localizada en la hoja 969 del Mapa
Topográfico Nacional a escala 1/50.000 y a su vez en la hoja 969-II a escala 1/25000.
Figura 2. Distribución de las hojas del mapa topográfico nacional
a escala 1/50000 en la provincia de Jaén
Las coordenadas geodésicas aproximadas del talud objeto de estudio en el sistema
de referencia ETRS89, adoptado como oficial para España son:
Latitud (φ)=37º 40' 46,66'' N
Longitud (λ) = 3º 37' 44,59'' W
Figura 3. Ubicación de la zona de estudio
17

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.2. DEFINICIÓN DEL SISTEMA DE REFERENCIA (SR)
Es necesario fijar un sistema de referencia común con el objetivo de poder fusionar
y comparar datos y productos. Es de gran importancia para el análisis multitemporal, se
detecta la evolución que pueda existir o modificación de la escena en el tiempo
transcurrido entre las tomas de datos.
Por otro lado se van a fusionar y analizar datos provenientes de distintas técnicas de
adquisición, por lo que será necesario que estos datos estén referidos al mismo SR para
poder tratarlos de manera indistinta.
El sistema de referencia elegido es el ETRS89, sistema de referencia oficial en
España (regulado por el Real Decreto 1071/2007 de 27 de julio), plano de proyección
UTM, en el huso 30 (que es el uso donde se encuentra la zona objeto de estudio). Como
datum altimétrico se utiliza el elipsoide GRS80. Dado que el GPS mide altitud
elipsoidal se elige dicho sistema, aunque no es el sistema altimétrico oficial en España,
para disminuir la propagación de errores en el cálculo de la componente Z al referir las
altitudes al geoide EGM08.
Para definir el sistema de referencia se utilizan los puntos de control y las bases de
escaneo medidos para referenciar los datos fotogramétricos y los datos TLS. A
continuación se describe la planificación y toma del apoyo terrestre. Primero se
comprueba si la técnica de medición de los puntos es la adecuada.
2.2.1. Estudio de incertidumbre a priori
Es necesario realizar un estudio previo de las incertidumbres para comprobar que
tanto la metodología como la instrumentación empleada para medir los puntos de
apoyo, son las adecuadas para la realización de este trabajo.
El estudio de incertidumbres se realiza a partir de datos aproximados y de las
características técnicas de los instrumentos utilizados.
18

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Los equipos G.N.S.S empleados son los LEICA SYSTEM 1200:
Equipo Precisiones en la fase
Estático (H/V) (σ)
Precisiones en la fase de tiempo
real. Estatico (H/V) (σ)
GNNS
LEICA AX 1203
5mm + 0,5ppm
10mm + 0,5ppm
5mm+0,5pm
10 mm+0,5pm Tabla 1. Características técnicas Leica AX 1203
El estudio de incertidumbres se divide en dos partes, un estudio para la
incertidumbre planimétrica y un estudio para la incertidumbre altimétrica.
2.2.1.1. Estudio de incertidumbre en la base B1
Para calcular la incertidumbre de la base B1 se considera una distancia aproximada
entre esta y la estación de referencia permanente “UJAE” perteneciente a la RAP (Red
andaluza de posicionamiento), tomando como precisiones del equipo las mencionadas
anteriormente.
El equipo de la base B1 se estaciona en trípode, como equipo fijo se toma la
estación permanente de la Universidad de Jaén que se considera libre de error.
a) Incertidumbre planimétrica de la base B1
Teniendo en cuenta que la distancia aproximada desde la estación de referencia
permanente a la zona de trabajo es de 19 km, se obtiene:
Incertidumbre de la línea base entre la estación de referencia y la base B1:
σLB = ±�𝑎2(m) + �b(ppm) · D(m)
1000000 �2
= ±0,011m
donde a=0,005m, b=0,5ppm y D= 19.000m.
Incertidumbre posicionamiento de la estación: σe = 0,000m
Incertidumbre posicionamiento de la señal: σs = 0,002m
La incertidumbre planimétrica en la base será igual a la componente cuadrática de
las incertidumbres anteriores:
σB1P = �σe2 + σs2 + σLB2 = ±0,011m
19

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
b) Incertidumbre altimétrica de la base B1
σZLB = ±�𝑎2(m) + �b(ppm) · D(m)
1000000 �2
= ±0,014m
donde a=0,010m, b=0,5ppm y Dmáx= 19.000 m
Incertidumbre inclinación de la señal: σj = 0,000m
Incertidumbre en la altura del aparato: σi = 0,002m
La componente cuadrática de los errores calculados anteriormente nos proporciona
la incertidumbre altimétrica de la base:
σZB1 = �σi2 + σj2 + σLB2 = ±0,014m
Para este tipo de trabajo se necesita la precisión 3D de los puntos observados y la
base, por lo tanto se combina las incertidumbres obtenidas en planimetría y altimetría y
se obtiene una precisión de la base en XYZ:
𝛔𝑿𝒀𝒁=�σPB12 + σZB12= 0.018m
2.2.1.2. Estudio de incertidumbres para los puntos de apoyo
A continuación se calcula la incertidumbre de los puntos de apoyo medidos en
RTK. Se utilizan las precisiones para la metodología en RTK.
a) Incertidumbre planimétrica
Se considera una distancia aproximada entre la base B1 y un punto de apoyo
cualquiera de 100 m.
Incertidumbre de la línea base entre la estación de referencia y la base
B1:
σLB = ±�𝑎2(m) + �b(ppm) · D(m)
1000000 �2
= ±0,005m
donde a=0,005m, b=0.5ppm y Dmáx= 100m
Incertidumbre posicionamiento de la estación: σe = 0,002m
20

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Incertidumbre posicionamiento de la señal: σe = 0,002m
La incertidumbre planimétrica a priori de los puntos levantados será la componente
cuadrática de las incertidumbres calculadas anteriormente.
σP = �σe2 + σs2 + σLB2 = ±0,006m
b) Incertidumbre altimétrica. Incertidumbre en la línea base:
σZB = ±�𝑎2(m) + �b(ppm) · D(m)
1000000 �2
= ±0,010m
donde a=0,010m, b=0.5ppm y Dmáx= 100 m
Incertidumbre inclinación de la señal: Consiste en la incertidumbre en la
toma de un punto debido a la inclinación del jalón. Viene establecida por la
fórmula:
σj= m•βrad
Siendo m la altura del jalón (2 m) yβel ángulo de inclinación del jalón (8’)
σj=β"r"
·m= ± 0,005m
σj= 0.005m
Incertidumbre en la altura del aparato: σi = 0,002m
La componente cuadrática de los errores calculados anteriormente nos proporciona
la incertidumbre altimétrica de los puntos:
σZ = �σi2 + σj2 + σLB2 = ±0,011m
𝛔𝑿𝒀𝒁=√σP2 + σZ2= 0.012m
21

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.2.1.3. Concatenación final de incertidumbres
Hasta ahora se han calculado las incertidumbres que tienen por separado cada elemento,
desde la base B1 hasta cualquier punto de apoyo levantado. Por tanto, solo queda
estudiar la incertidumbre que tendrían los puntos de apoyo, considerando la
incertidumbre obtenida en la base B1.
Las incertidumbres que se estiman en cada parte son las siguientes:
INCERTIDUMBRE EN B1 ±0,018m
INCERTIDUMBRE PUNTOS DE APOYO ±0,012m
Se obtendrá la incertidumbre total expandida, teniendo en cuenta la incertidumbre
de la base.
𝛔𝐓𝑿𝒀𝒁 = √0.0182 + 0.0122 m=0.022m
La incertidumbre absoluta de los puntos de apoyo será ± 0.022m.
Estas precisión se calcula con datos aproximados a priori, lo que en realidad
interesa, son las precisiones obtenidas tras la medición.
2.2.2. Observación de los puntos de apoyo
El sistema de referencia se materializa mediante la densificación de la Red
Andaluza de Posicionamiento (RAP). Para ello se implementa una base fija que se dota
de coordenadas empleando como estación de referencia la estación permanente de la
universidad de Jaén. Desde la base fija se radian el resto de puntos de control y puntos
de estación del escáner, con ello el sistema queda perfectamente materializado.
A pie de campo se dispone a colocar las dianas conforme lo establecido en la
planificación, se clava en el centro de cada diana un clavo (ø =7mm), las marcas deben
permanecer fijas al menos durante la observación TLS, medición de los puntos por
técnicas G.N.S.S. y el vuelo, para ello se deben anclar al terreno con sus respectivos
clavos.
Para materializar sobre el terreno la base empleada para la radiación, se ubica en un
lugar despejado que no impida el buen funcionamiento del GPS. La marca es una estaca
22

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
de madera con un clavo de 4mm de diámetro y se señala en el suelo con pintura roja por
si hay que localizarla posteriormente. Se realiza su reseña para facilitar la localización,
acceso y coordenadas.
Para obtener el apoyo terrestre se emplean técnicas GNSS trabajando con dos
equipos, uno fijo estacionado sobre la base y otro móvil para medir los puntos.
Para medir la base se introduce en el equipo de referencia la estación permanente
“UJAEN” como referencia, el equipo mide y emite correcciones constantemente. El
tiempo de medición es de unos 40 minutos. El método empleado en la medición de los
puntos de control es: Radiación, considerando como referencia la base B1.
Con el receptor móvil montado en jalón, se miden los puntos de control en modo
RTK, el procedimiento es el siguiente:
situar y nivelar el jalón sobre el punto
ocupar el punto una media de 1 minuto
almacenar
pasar al siguiente punto.
2.2.3. Procesado de los datos
El procesado de los datos se ha realizado mediante el software Leica Geo Office.
Con el procesado se resuelven las ambigüedades y se compensan los errores existentes
en las líneas base. Se compensa primero la línea base entre la base B1 y la estación de
referencia UJAE, y luego las líneas base de los puntos de control y la base B1 ya
ajustada. Los puntos son observados mediante radiación desde la misma.
23

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 4. Observación de los puntos de control
Tras realizar el ajuste de las coordenadas de los puntos medidos con el software
antes mencionado, se obtienen las desviaciones típicas de dichos puntos, que quedan
reflejadas en la siguiente tabla.
ID σX(m) σY (m) σZ (m) E1 0.003 0.002 0.009 E2 0.003 0.003 0.007
d100 0.006 0.005 0.016 d101 0.006 0.005 0.016 d102 0.008 0.006 0.021 d103 0.008 0.005 0.022 d104 0.007 0.008 0.020 d105 0.005 0.005 0.012 d106 0.007 0.008 0.019 d107 0.005 0.006 0.015 d108 0.005 0.006 0.014 d109 0.005 0.005 0.013 d110 0.005 0.006 0.014 d111 0.006 0.007 0.017
d1 0.004 0.004 0.012 d2 0.004 0.003 0.010 d3 0.006 0.005 0.016 d4 0.003 0.003 0.009
24

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
ID σX(m) σY (m) σZ (m) d5 0.004 0.004 0.009 d6 0.004 0.005 0.012
scan1 0.001 0.001 0.004 scan2 0.001 0.001 0.003
Tabla 2. Desviación típica de los puntos medidos mediante técnica G.N.N.S
A los datos exportados queda aplicarles otro cálculo, hay que adaptar los datos a la
metodología TLS. El sistema de proyección cartográfica que se emplea es una
modificación de la proyección UTM. La proyección UTM utiliza un factor de escala K0
para reducir a la mitad las deformaciones lineales en las zonas más extremas del huso,
las magnitudes lineales quedan afectadas por dicho factor de escala. La técnica TLS
permite medir coordenadas 3D de forma directa, por lo que habría que aplicar este
factor de escala solo a las coordenadas planimétricas, una vez que los datos escáner
estuvieran perfectamente nivelados.
Para solucionar este problema, se opta por eliminar el factor de escala K0. Los
puntos de control (PC) se radian desde la base B1, que se considera como referencia,
por lo tanto se ha considerado el factor de escala K0 desde la misma a los PC. Se
calculan las distancias sin deformación lineal entre la base y dichos puntos, con esta
distancia se vuelven a calcular las coordenadas sin deformación lineal de los puntos.
Se obtiene un sistema de referencia local al que queda referido todo el proyecto.
A continuación se presenta la Reseña de la base de estacionamiento (B1), y la base
de referencia UJAEN.
25
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
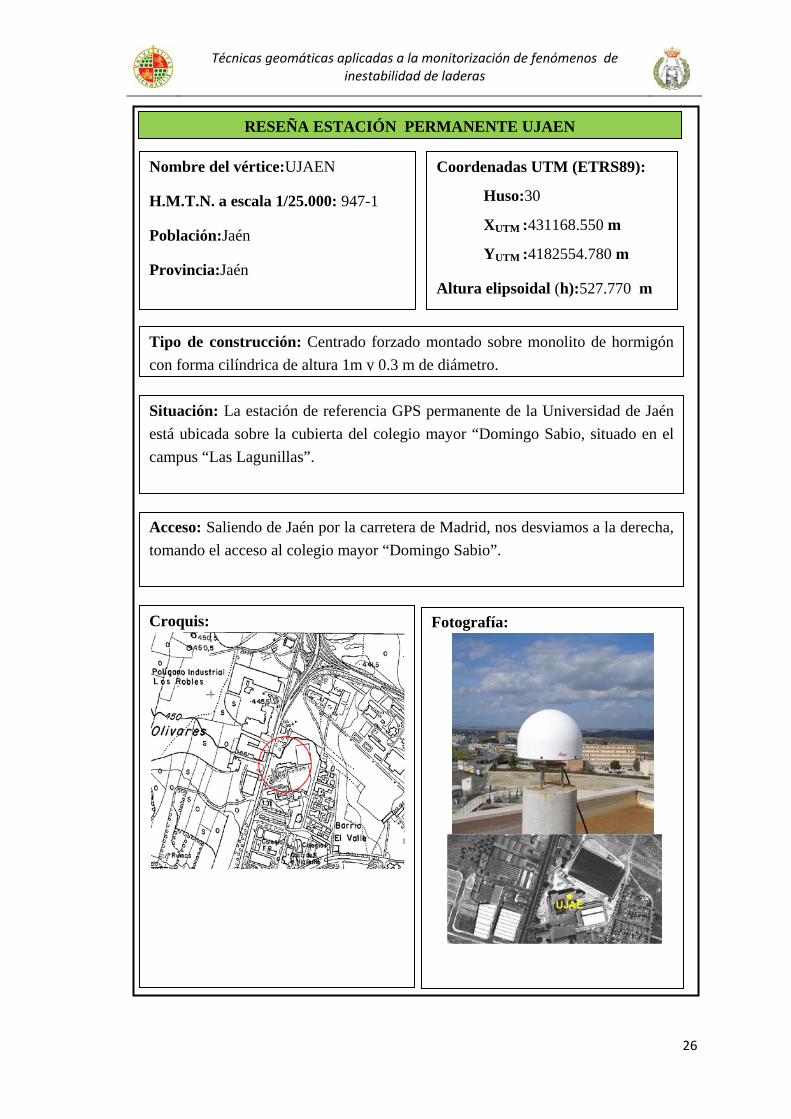
RESEÑA ESTACIÓN PERMANENTE UJAEN
Nombre del vértice:UJAEN
H.M.T.N. a escala 1/25.000: 947-1
Población:Jaén
Provincia:Jaén
Coordenadas UTM (ETRS89):
Huso:30
XUTM :431168.550 m
YUTM :4182554.780 m
Altura elipsoidal (h):527.770 m
Situación: La estación de referencia GPS permanente de la Universidad de Jaén está ubicada sobre la cubierta del colegio mayor “Domingo Sabio, situado en el campus “Las Lagunillas”.
Tipo de construcción: Centrado forzado montado sobre monolito de hormigón con forma cilíndrica de altura 1m y 0.3 m de diámetro.
Croquis:
Fotografía:
Acceso: Saliendo de Jaén por la carretera de Madrid, nos desviamos a la derecha, tomando el acceso al colegio mayor “Domingo Sabio”.
26

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
RESEÑA BASE (B1)
Nombre del vértice:B1
H.M.T.N. a escala 1/25.000: 969-2
Ubicación:PK 59.Autovía A-44 (salida Cambil)
Provincia:Jaén
Coordenadas UTM (ETRS89):
Huso:30
XUTM :444694.821m
YUTM :4170561.895m
Altura elipsoidal (h):640.270m
Situación:La base se sitúa en un pequeño talud enfrentado a la ladera objeto de estudio, a la espalad de los aparcamientos del restaurante “Oasis”.
Tipo de señal:Estaca de madera clavada en el terreno, en su extremidad superior clavo de acero de diámetro 4 mm.
Croquis:
Fotografía:
Acceso: Desde la autovía A-44 se toma la salida en el PK-59 dirección Granada, en la rotonda del siguiente cruce se toma la N-323 dirección Cambil, a pocos metros tras una curva pronunciada se puede observar la zona de estudio.
27

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.2.4. Estudio de incertidumbres a posteriori
Se considera que la estación de referencia “UJAEN”, es libre de error en posición, por
lo que únicamente se tiene en cuenta la incertidumbre de la base B1.
Tras realizar el ajuste se obtienen las precisiones con la que se mide la base B1:
σx: ±0.000m σy: ±0.000m σz: ±0.000m
2.2.4.1. Incertidumbre en la Base B1
a) Incertidumbre en planimetría:
Incertidumbre posicionamiento de la estación: σe = 0,000m
Incertidumbre posicionamiento de la señal: σs = 0,002m
Con las incertidumbres tenidas en cuenta anteriormente se cuantifica la
incertidumbre planimétrica en la base B.
σP = �σc2 + σe2 + σs2 = ±0,002m
b) Incertidumbre en altimetría:
Incertidumbre inclinación de la señal: σj = 0,000m
Incertidumbre en la altura del aparato: σi = 0,002m
σZ = �σz2 + σi2 + σj2 = ±0,002m
Se obtiene una incertidumbre altimétrica en la base B1 de ±0.002m.
Incertidumbre en la posición 3D de la base B1
𝛔𝑿𝒀𝒁=√σP2 + σZ2= 0.003m
2.2.4.2. Incertidumbre en los puntos de apoyo
a) Incertidumbre en planimetría:
Incertidumbre posicionamiento de la estación: σe = 0,002m
Incertidumbre posicionamiento de la señal: σs = 0,002m
Incertidumbre circular: σc = 0,010m
28

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Con las incertidumbres tenidas en cuenta anteriormente se cuantifica la
incertidumbre planimétrica de los puntos de apoyo.
σP = �σc2 + σe2 + σs2 = ±0,010m
b) Incertidumbre en altimetría:
Incertidumbre inclinación de la señal: σj = 0,005m
Incertidumbre en la altura del aparato: σi = 0,002m
Incertidumbre en Z del punto con más error: σz = 0,015m
σZ = �σz2 + σi2 + σj2 = ±0,016m
c) Incertidumbre en la posición 3D de los puntos medidos:
Posición relativa
𝛔𝑿𝒀𝒁=√σP2 + σZ2= 0.019m
La precisión obtenida en la medición de los puntos de apoyo es de 1,9 cm.
29

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.3. INSTRUMENTACIÓN Y SOFTWARE
2.3.1. Instrumentación
• Vehículo aéreo no tripulado
Los vehículos aéreos no tripulados (UAV) surgieron en los años 50, aunque se
pusieron en práctica con fines militares por el ejército norteamericano en los años 60.
Su desarrollo se ha visto fuertemente impulsado por las aplicaciones de defensa militar,
no comenzando su aplicación civil hasta los años 90. Su principal ventaja es la
capacidad para la adquisición remota de datos en entornos peligrosos o zonas
inaccesibles de manera rápida y económica.
En fotogrametría los dispositivos UAV se utilizan para la captura de información
geográfica a partir de imágenes cenitales y oblicuas, con baja altura de vuelo (menor a
400 m). Representan una herramienta novedosa de última generación que ha
revolucionado el mundo de la geomática, ya que el UAV es un vehículo aéreo no
tripulado, teleguiado, que puede seguir un plan de vuelo o se controla dinámicamente de
forma remota. El sistema empleado es una plataforma aérea que incorpora una cámara
digital para la captura de datos espaciales. Es una herramienta muy práctica que permite
la recogida de datos (fotografías) en un periodo de tiempo bastante corto y con una gran
resolución dependiendo de las características del trabajo.
El modelo empleado en el presente proyecto es ASCTEC FALCON 8, helicóptero
con 8 rotores guiado por radio control y equipado con sistema de posicionamiento y de
navegación inercial (GPS/INS).
Figura 5. Subunidades del sistema de vuelo ASTEC FALCON 8
30
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
1. Unidad central: estructura rígida y ligera de fibra de carbono, que
incorpora los distintos módulos de enlace, interruptor, batería, conector y
montura de la cámara y sistema estabilizador de vuelo.
2. Montura de la cámara con compensación automática.
3. Cuatro tubos de carbono conectados en el medio del aparato.
4. Rieles
5. Antena de enlace.
6. Antena de enlace video.
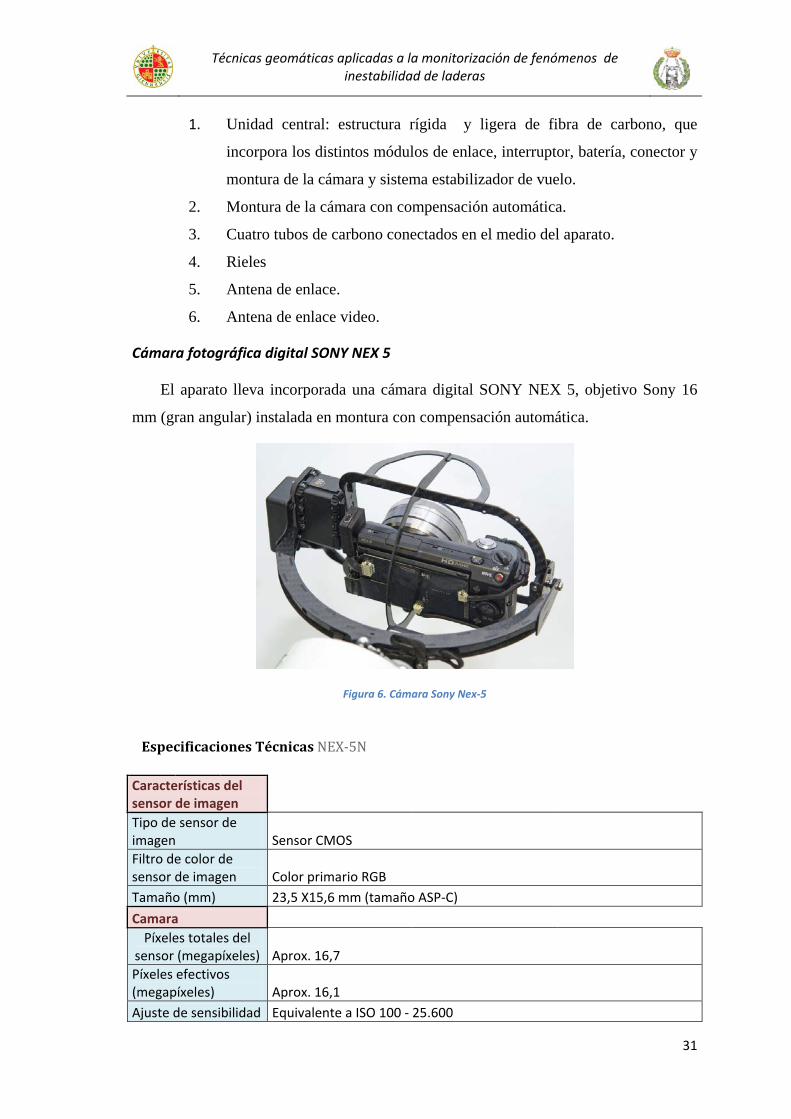
Cámara fotográfica digital SONY NEX 5
El aparato lleva incorporada una cámara digital SONY NEX 5, objetivo Sony 16
mm (gran angular) instalada en montura con compensación automática.
Figura 6. Cámara Sony Nex-5
Especificaciones Técnicas NEX-5N
Características del sensor de imagen
Tipo de sensor de imagen Sensor CMOS Filtro de color de sensor de imagen Color primario RGB Tamaño (mm) 23,5 X15,6 mm (tamaño ASP-C) Camara
Píxeles totales del sensor (megapíxeles) Aprox. 16,7 Píxeles efectivos (megapíxeles) Aprox. 16,1 Ajuste de sensibilidad Equivalente a ISO 100 - 25.600
31
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
ISO Sistema de enfoque automático Automático/Manual Obturador
Tipo Control electrónico, transversal vertical, tipo de plano focal Rango de velocidad de obturación (segundos) 1/4000 - 30 y temporizador Velocidad de sincronización con flash; segundo 1/160 Grabación
Formato de grabación
Compatible con JPEG (DCF versión 2.0, Exif versión 2.3, compatible con MPF Baseline), RAW (formato RAW 2.2 de Sony), 3D MPO (compatible con MPF Extended)
Imagen de tamaño grande: JPEG(píxeles) 4912 X 3264 (16 M) Calidad de las fotografías RAW, RAW + JPEG, JPEG fino, JPEG estándar Dimensiones
Anchura (mm) 110,8 Altura (mm) 58,8 Profundidad (mm) 38,2
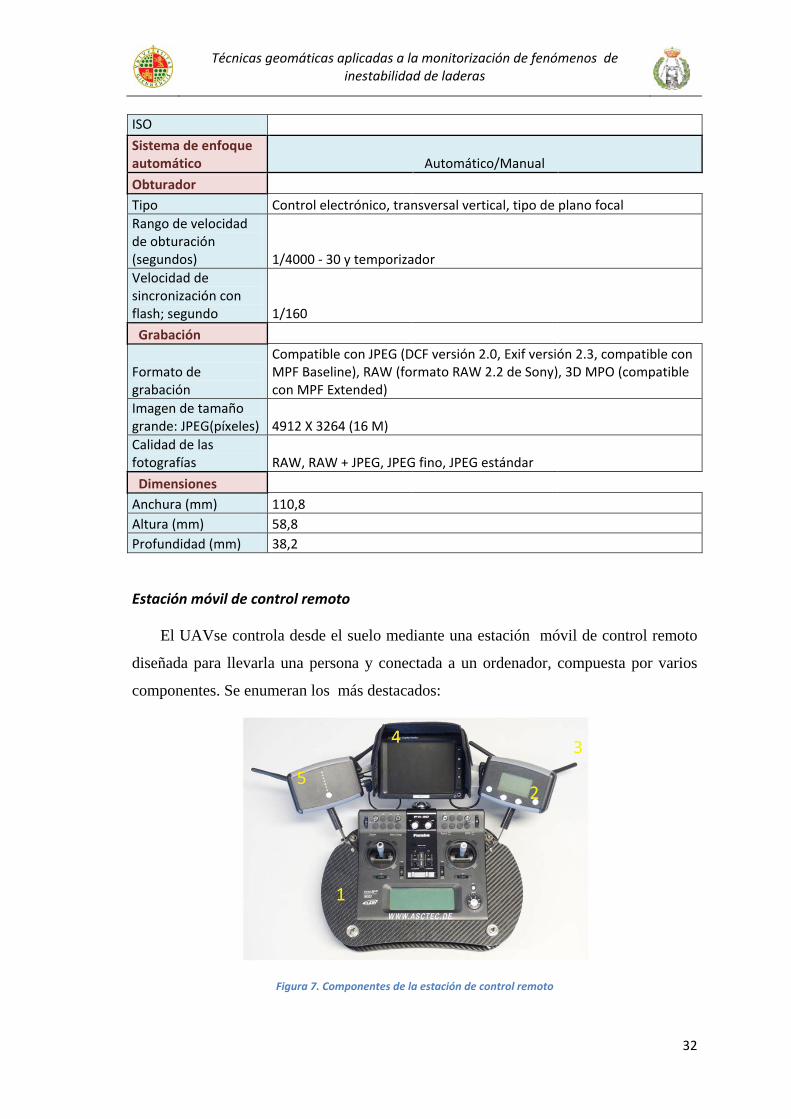
Estación móvil de control remoto
El UAVse controla desde el suelo mediante una estación móvil de control remoto
diseñada para llevarla una persona y conectada a un ordenador, compuesta por varios
componentes. Se enumeran los más destacados:
Figura 7. Componentes de la estación de control remoto
32
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
1. Control remoto, mandos de control
2. Visualización del estado de los datos de telemetría, y activar funciones.
3. Distintos enlaces de datos, transmiten y reciben los datos de vuelo.
4. Pantalla LCD, permite visualizar en directo el video con la toma de fotografías.
5. Recibe el video en directo.
• Escáner láser terrestre (TLS)
Terminología:
El Escáner laser terrestre es un dispositivo fijo en tierra que proyecta un rayo láser
estructurado sobre la superficie de un objeto con el fin de recoger información
geométrica del punto de incidencia, mide coordenadas 3D e incluye información
adicional como intensidad de la señal o el valor RGB de los puntos capturados, con el
fin de reunir datos sobre forma, dimensiones y en ocasiones intensidad y color del
objeto, permitiendo así la reconstrucción del mismo (modelado métrico).
El sistema de medición es similar al de la topográfica clásica, se miden ángulos y
distancias, es un sistema mucho más rentable permitiendo adquirir hasta 100.000 puntos
por segundo. Además su campo de visión es en forma de cono, similar a una cámara,
con la diferencia que reúne información sobre la profundidad.
Se obtiene como resultado una matriz de datos, semejante a una toma fotográfica,
que además de ángulos horizontales y verticales e intensidad de color del punto, se
dispone de la distancia en el espacio de cada punto.
Abarca un gran campo de aplicación: arqueología, arquitectura, ingeniería, etc.
Tecnología:
Principio básico de la medida: hay varias técnicas de medición 3D en los que se
basa el láser. En este trabajo se emplea instrumental cuya medición es basada en el
tiempo.
33

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 8. Técnicas de medición en las que se basa el láser
Medición basada en el tiempo: los escáneres miden un intervalo de tiempo entre dos
sucesos, hay dos principios de medición por tiempo: escáneres basados en pulso (tiempo
de vuelo -time of flight o TOF-) y basados en fase.
Escáneres basados en pulso (tiempo de vuelo): las ondas de luz viajan con una
velocidad finita y constante a través de un medio. Por consiguiente se mide el intervalo
de tiempo en el que la luz viaja de una fuente a un objeto reflectante y regresa a la
fuente, la distancia a dicha superficie, puede calcularse mediante la fórmula:
Donde: c = velocidad de la luz t= tiempo de ida y vuelta de la señal
34

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 9. Principio de un escáner basado en el tiempo de vuelo
Los escáneres por tiempo de vuelo no suelen usar haces continuos, si no un pulso
de láser. Escanean su campo de visión punto a punto cambiando la dirección del haz
mediante una unidad de desviación. Un láser escáner 3D basado en el TOF puede
medir de 2000 a 50000 puntos por segundo.
Hay que destacar que la intensidad del pulso recibido es menor que la del pulso
emitido, para que no se produzcan mediciones ambiguas, el tiempo medido debe ser
mayor que la amplitud del pulso. La máxima frecuencia del pulso está determinada por
el hecho de que el emisor no puede enviar un pulso hasta que no haya recibido el
anterior. La finalidad de esta restricción es evitar confusión en la llegada de los pulsos y
se denomina rango de certeza, depende de la duración del pulso y de su frecuencia.
Hay tres factores principales que determinan la precisión de un sistema de medida
por tiempo de vuelo:
• La capacidad de seleccionar la misma posición relativa en el pulso emitido
y recibido para medir el intervalo de tiempo.
• La precisión con la que se fija un intervalo de tiempo.
• La precisión del instrumental en la medida de los intervalos de tiempo.
La ventaja de usar un sistema de tiempo de vuelo para las mediciones láser de
distancia es la alta concentración de energía transmitida, hace posible las mediciones a
larga distancia.
35

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Los equipos empleados en el presente proyecto utilizan como técnica de medición
el tiempo de vuelo.
OPTECH ILRIS 3D
ILRIS-3D es un escáner láser integrado con captura de
puntos e imagen digital. Puede ser operado a través de
una conexión cableada a través de un ordenador portátil
mediante un software específico (ILRS 3D Controller).
Su campo de visión es de 40º x 40º y las precisiones en
distancia y posicional son de 7mm/100m y 8 mm/100m,
respectivamente.
Utiliza un sistema de doble espejo para realizar el
barrido. El método para llevar a cabo el escaneo es el
siguiente: Un movimiento del espejo X produce el eje horizontal X. Un segundo
movimiento del espejo Y produce el eje vertical Y.
El espejo X se mueve de izquierda a derecha hasta llegar al extremo y forma la
primera línea de escaneo en la parte inferior del área de barrido, el espejo Y incrementa
una posición y el espejo X se mueve horizontalmente esta vez de derecha a izquierda, el
proceso es iterativo hasta completar la zona. Según el siguiente esquema
Figura 11. Fundamento de escaneo del Optech Ilris 3D
Este escáner es altamente eficiente en campo, por su velocidad de captura de datos
(hasta 2500 puntos/s) y el amplio rango dinámico de 3m-1500 m.
Figura 10. Optech Ilris 3D
36

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
LEICA C10
Es uno de los escáneres más populares a día de hoy por su
diseño compacto que incluye escáner, sensor de inclinación,
batería, controlador, almacenamiento de datos y cámara de alta
resolución. El campo de visión es completo,360º x 270º, su
alcance es de hasta 300 m con un 90 % de reflectividad, y
velocidad de captura de hasta 50000puntos/segundo. En
relación a las precisiones, en distancia es de 6mm/50m y
precisión posicional de 4mm/50m. Dispone de una interfaz
intuitiva para programar el escaneo, puede tomar imágenes de
alta resolución (cámara digital 4 megapixel) para texturizar la nube de puntos. Es
compatible con los equipos topográficos, permite montar antenas GNSS. Dispone de un
compensador de doble eje, plomada láser y base nivelante para un estacionamiento
rápido.
• Equipo GNNS Leica System1200:
Las características técnicas de estos equipos son:
Sensor Fase en Post-Proceso (𝝈) Fase en Tiempo Real (𝝈)
Estático(H/V) Cinemático (H/V) Estático (H/V) Cinemático (H/V)
GX1230 5mm +0,5ppm 10mm+1ppm 5mm+0,5ppm 10mm + 1ppm
10mm+0,5ppm 20mm+1ppm 10mm+0,5ppm 20mm + 1ppm
Tabla 3. Características técnicas de los equipos GNNS Leica System 1200
Los equipos LeicaSystem 1200 están compuestos de los siguientes elementos:
• Sensor GX1230: Receptor de doble frecuencia.
• Antena AX1202: Tiene el plano de tierra integrado. Se conecta
mediante TNC hembra y tiene una rosca para anclaje.
• Controladora: Permite acceder a las configuraciones del equipo y resto
de utilidades que nos dan un control completo del GPS.
• Accesorios:
· Base para barra telescópica.
Figura 12. Escáner Leica C10
37

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
· Elementos de sujeción para bastón.
· Soporte.
· Base nivelante.
· Gancho de alturas.
· Cables.
· Tarjeta Compact Flash.
· Baterías.
Estos equipos pueden montarse en pilar, trípode o jalón. Para la realización de este
proyecto se montaron tanto en jalón como en trípode.
2.3.2. Software
Se han empleado distintos programas en el desarrollo del presente proyecto. Este
apartado recoge aquellos específicos que se han utilizado en las distintas fases del
mismo.
• AgiSoft PhotoScan 1.0.3
Es un software fotogramétrico de reconstrucción 3D a partir de fotografías. Con
este software se pueden obtener de una manera muy efectiva nubes de puntos 3D,
generar superficie y determinar dimensiones y orientación de objetos.
La técnica de trabajo con este software es orientar primero el bloque
fotogramétrico. En un primer paso se orienta relativamente el bloque mediante la
medida automática de puntos homólogos en todas las imágenes. La orientación absoluta
se realiza empleando puntos de control. Posteriormente, se genera una malla de puntos y
se sitúa el objeto en un espacio 3D virtual. Esta nube de puntos se puede exportar para
procesarlas con otros programas, o bien se pueden generar la superficie que define el
objeto y finalmente los productos fotogramétricos deseados. También dispone de una
herramienta de filtrado o clasificación del terreno, el software calcula que puntos
pertenecen al terreno en sí y cuales pertenecen a objetos situados sobre el terreno.
Este programa se emplea en multitud de aplicaciones de ingeniería, arquitectura,
arqueología, etc.
38
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
• SOCET SET 5.6.0
Software especifico para las estaciones fotogramétricas 3D. Permite realizar todo el
proceso fotogramétrico a partir de imágenes digitales aéreas.
El programa trabaja en visión estereoscópica, monoscopica, además de contar con
herramientas como la correlación automática, triangulación automática, generación de
modelos digitales del terreno (MDTs) y de elevación MDEs, producción de ortofotos y
mosaicos. Permite además la fotointerpretación de modelos, y restitución de datos
vectoriales.
• LEICA Geo Office Combinado
Utilizado para exportar los datos tomados con GNSS procesarlos y visualizarlos. Es
la herramienta ideal para visualizar, procesar, revisar la calidad y guardar los datos antes
de exportarlos a, prácticamente, cualquier formato requerido por programas
de cartografía o ingeniería.
• Maptek I-Site Studio
Es un paquete de procesamiento de nubes de puntos3D, diseñado para aplicaciones
topográficas y de ingeniería civil.
Capacidades:
- Creación rápida de modelos 3D precisos.
- Permite realizar un gran número de análisis a partir de los modelos formados.
Características:
- Interfaz fácil de usar: utiliza un flujo de trabajo intuitivo.
- Gestiona paquetes de datos de gran tamaño, de hasta varias decenas de millones
de puntos
- Trabaja en formatos múltiples: DXF, DWG, CSV, 3DP, ZFS y PTX.
- Opciones registro, referenciación y fusión de nubes de puntos: conociendo
características superficiales y coordenadas de puntos comunes.
- Herramientas de modelado de gran alcance: crea modelos 3D precisos mediante
triangulación topográfica, superficie de fusión, y triangulación de bucle.
- Opciones de filtrado intuitivos: Filtrado de datos por grupo de datos o puntos
individuales o por región de interés mediante polígono.
39

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
- Herramientas de análisis extensos: analizar eficientemente grandes conjuntos de
datos utilizando herramientas de consulta y visualización.
- Módulo de geotécnica especializada: Analizar estructuras y superficies,
monitorizar movimientos e identificar las estructura y tendencias dominantes
- Opciones de presentación: Crear animaciones de una serie de fotogramas, salida
de vídeo digital de alta definición.
- Exportación directa a PDF 3D y formatos universales de modelos 3D.
- Interfaz de lenguaje personalizado.
40

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.4. UAV
2.4.1. Planificación del vuelo
La toma de las fotografías se lleva a cabo mediante un vehículo aéreo no tripulado
(UAV), guiado por radio control y equipado con sistemas de posicionamiento y de
navegación inercial. Lleva incorporada una cámara digital instalada en una montura con
compensación automática
Figura 13. Sistema Astec Falcon 8
La planificación del vuelo se calcula según las condiciones del proyecto
(gestionado mediante el software AscTec NAVIGATOR) se ejecuta en modo de pilotaje
automático con ayuda del sistema AscTec AutoPilot Control, que es una herramienta
que permite controlar todas las funciones del sistema de vuelo. Los comandos se envían
desde el ordenador mediante un cable USB a la estación de control.
La planificación del vuelo se realiza previamente en gabinete, empleando para ello
una imagen de la zona previamente georreferenciada. Puede ser suficiente una imagen
descargada desde algún servidor tipo Google Earth o Iberpix (IGN).
2.4.1.1. Diseño del vuelo fotogramétrico
A partir de inspecciones previas a la zona de trabajo, así como al disponerse de
campañas anteriores (proporcionadas por el Grupo de Investigación TEP-213), se
consideró la posibilidad de realizar tres pasadas verticales de forma que se cubriese toda
la zona objeto de estudio. Pero, por otro lado, también se planificaron otras tres pasadas
inclinadas que asegurasen una escala homogénea en toda la ladera.
En concreto, se trata de una zona con una pendiente aproximada del 30 %,lo cual
presentaba serios problemas a la hora de planificar el vuelo. La altura de vuelo se
escogió de modo que cumpliese las condiciones del proyecto en cuanto a solapes,
41

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
variación de escala y GSD. La planificación del vuelo se elaboró sobre la cartografía
existente (imagen de satélite georreferenciada extraída de Iberpix). Se delimitó la zona
objeto de estudio y se tomó como referencia para la línea de vuelo la carretera nacional
N-322 situado a pie de dicho talud.
Como cualquier planificación, ha sido necesario determinar los parámetros de vuelo
teniendo en cuenta las condiciones del propio proyecto: cámara con la que se realiza la
toma, solapes necesarios, zona objeto de estudio, etc. A continuación se muestran una
serie de parámetros que se han analizado para planificar la misión de vuelo final.
(*) Tamaño del pixel sobre el terreno (GSD: ground sample distance):
𝐺𝑆𝐷 =𝐷𝑓
𝑟𝑒𝑠𝑜𝑙𝑢𝑐𝑖𝑜𝑛
Formulas para determinar los parámetros de vuelo: Distancia de Vuelo (D) Anchura terreno (At) Longitud terreno (LT) Escala de vuelo (mf): mf=GSD/pix Lados del fotograma en el terreno: Lt=l*mf Recubrimiento longitudinal: (p = 65%) Recubrimiento transversal : (q = 35%) Base aérea: B= Lt *(1-p) Distancia entre pasadas: A=Lt*(1-q) Margen de seguridad longitudinal MSL =2*B Margen de seguridad Transversal MST=q Longitud de la pasada Lp =LT +2MSL Anchura que debe ser cubierta Lq =At+2MST Número de fotogramas por pasada np=(Lp/B)+1 Número de pasadas nq= (Lq-Lt)/A +1
Datos de partida: Datos de la cámara: GSD(*)máx. (mm) 20 SONY NEX 5 (GSD en mm) W H
D (m) 50 Tamaño Imagen 4912 3264 p % 65 Tamaño Formato 24 15,9479 q % 35 Distancia focal (mm) 16
GSD(*)medio(mm) 15 Tamaño medio del pixel (mm) 0,004886
42

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Así, los parámetros de vuelo calculados según la altura de vuelo son (Tabla 4):
D (m) GSD (mm) mf Lt (m) Lt (m) p (m) q (m) B (m) A (m) MSL (m) MST (m) 30 9.161 1875 45 29.902 29.25 10.466 15.750 19.437 31.5 10.466
35 10.688 2187.5 52.5 34.886 34.125 12.210 18.375 22.676 36.75 12.210
40 12.215 2500 60 39.870 39 13.954 21.000 25.915 42 13.954
45 13.742 2812.5 67.5 44.853 43.875 15.699 23.625 29.155 47.25 15.699
50 15.269 3125 75 49.837 48.75 17.443 26.250 32.394 52.5 17.443
55 16.796 3437.5 82.5 54.821 53.625 19.187 28.875 35.634 57.75 19.187
60 18.322 3750 90 59.805 58.5 20.932 31.500 38.873 63 20.932
65 19.849 4062.5 97.5 64.788 63.375 22.676 34.125 42.112 68.25 22.676
70 21.376 4375 105 69.772 68.25 24.420 36.750 45.352 73.5 24.420
75 22.903 4687.5 112.5 74.756 73.125 26.165 39.375 48.591 78.75 26.165
80 24.430 5000 120 79.740 78 27.909 42.000 51.831 84 27.909
85 25.957 5312.5 127.5 84.723 82.875 29.653 44.625 55.070 89.25 29.653
90 27.484 5625 135 89.707 87.75 31.397 47.250 58.310 94.5 31.397 Tabla 4. Parámetros de vuelo según la distancia de vuelo (en rojo se marca la altura de vuelo seleccionada)
A continuación se representa gráficamente la dirección de las líneas de vuelo y la
posición de los puntos de disparo para las pasadas cenitales, calculadas para terreno
llano, considerando como altura de vuelo D=50m sobre la vertical, la cual supone un
GSD del orden de 1.5 cm.
43

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 14. Posición de los disparos en la pasada cenital según cálculos
Sobre la cartografía existente, se han estudiado las diversas altitudes del terreno de
la zona objeto de estudio. Debido a que la pendiente es constante (aprox. 30%) se ha
considerado el mismo espaciado entre las líneas de vuelo, como si el terreno fuese llano.
Se han considerado diversas propuestas en función de la distancia de vuelo sobre la
ladera.
44

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
REDCENITAL:
Caso_1: Altura de vuelo constante D = 50 m (pte. = cte.)
Si se considera la distancia entre ejes de vuelo (A), tal y como se realiza en terreno
llano, disminuye el recubrimiento lateral en las pasadas que se realizan sobre zonas de
terreno más elevadas. En las zonas más bajas existe mucho recubrimiento pero sin
embargo hay una gran variación de escala entre los puntos comunes que aparecen en
fotos de pasadas diferentes.
Figura 15. Toma cenital primera propuesta
Recubrimiento máximo y mínimo entre las pasadas y la variación del GSD:
Pasadas Recubr._max (m) Recubr._min (m) Var. Escala
1_2 47.350 36.750 28.57% 2_3 27.410 26.250 40.00% 1_3 80.00%
45

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Caso_2: Altura de vuelo sobre talud D = 50 m (pte. = cte.)
Si se considera la altura de vuelo (D=50 m) para cada pasada habría un desnivel de
aproximadamente 20 m, según los cálculos hay suficiente solape, pero la variación de
escala no cumple con las condiciones del proyecto.
Figura 16. Toma cenital segunda propuesta
Recubrimiento máximo y mínimo entre las pasadas y variación de escala del GSD entre las diferentes pasadas:
Pasada Recubr._max (m)
Recubr._min (m)
Variación escala
1_2 27.410 7.475 40%
46

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Caso_3: Altura de vuelo variable (pte. = cte.)
Como el terreno cambia de una forma gradual, se podría aumentar la altitud del
vuelo de una forma progresiva, de modo que se mantiene la escala global tan constante
como fuera posible. En este caso varía la altura de referencia del vuelo, a medida que
varía la altura del terreno.
Figura 17. Toma cenital tercera propuesta
Recubrimiento máximo y mínimo y variación del GSD entre las 3 pasadas:
Pasdas Recubr._max Recubr._min Variación Escala
1_2 34.88603125 9.9674375 23 % 2_3 22.42673438 2.491859375 20 % 1_3 38 %
Tras la realización de los cálculos, se ha optado finalmente por realizar la toma
cenital a una altura de vuelo de 50 m sobre el talud, en todas las pasadas (Figura 18).
Con ello se simplifica la misión de vuelo y se mantiene un solape transversal cercano al
30%. La variación de escala (presente en todas las opciones) se debe resolver mediante
tomas oblicuas.
47

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 18. Planificación de la misión de vuelo para la toma cenital con UAV
TOMAINCLINADA:
En ninguno de los casos planteados anteriormente se consigue mantener una escala
uniforme en el área de interés, por lo tanto se plantea realizar una toma, inclinado la
cámara de manera que el eje de la cámara esté perpendicular al plano más aproximado
del talud. De este modo, se asegura la misma escala para toda la zona de la ladera.
Para calcular los parámetros de vuelo se inclina el plano del talud restando el
ángulo de la pendiente. Sobre el talud inclinado se calculan estos parámetros como si el
terreno fuese llano y se volará a una altura de 50 m sobre el mismo. A la hora de
planificar y ejecutar el vuelo final hay que tener en cuenta la pendiente, por lo tanto se
aplica este giro en sentido inverso a los cálculos anteriores. A diferencia del vuelo
cenital se aumenta el solape transversal a 60% ya que según se puede observar en la
Figura 19 el solape de 35% planteado previamente es insuficiente.
D (m) GSD (mm) mf Lt (m) Lt (m) p (m) q (m) B (m) A (m) 50 15.269 3125 75 49.837 50.25 28.906 24.283 17.67
Tabla 5. Parámetros de vuelo calculados para la pasada inclinada
48

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 19. Propuesta toma inclinada
En la Figura 20 se representa el esquema del vuelo ejecutado para las pasadas
inclinadas.
Figura 20. Ejecución de la toma inclinada con UAV
49

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.4.2. Planificación de la red de apoyo
Previamente a la realización del vuelo, se elaboró la planificación de la red de
apoyo en la que se determinó la ubicación de las dianas, de modo que estuviesen bien
distribuidas dentro del bloque fotogramétrico. El tamaño de estas dianas se eligió para
asegurar la visibilidad de la marca en las imágenes. Para ello se hizo un reconocimiento
previo de la zona, así como la realización de un vuelo de prueba, sobre el que se
planificó la distribución, número y tamaño de las dianas que sirvieron como puntos de
apoyo.
Los puntos de apoyo son necesarios para la correcta orientación en el espacio del
bloque fotogramétrico. En la planificación se determinó la distribución de los puntos de
apoyo repartidos por toda la zona de manera que cada punto apareciese en varias
fotografías en la misma pasada y en la siguiente.
Las marcas son dianas de forma circular impresas en vinilo, blancas sobre fondo
negro. Estas dianas disponen de una zona central marcada para posicionar el jalón en
campo o bien que esta zona aparezca en la imagen digital, facilitando su medida sobre
la imagen. Al seleccionar las dimensiones adecuadas hay que tener en cuenta ciertos
factores, tales como la altura de vuelo, el GSD y la resolución de la imagen. Las marcas
preseñalizadas deben ser perfectamente identificable de modo que puedan medirse en la
imagen sin error en la identificación y de la forma más precisa posible durante el
proceso de orientación. Para determinar el detalle, se realiza una simulación con el
tamaño de las dianas. El Grupo de Investigación TEP-213 ha proporcionado las dianas,
resultando las más apropiadas las de un radio de 11 cm. Ello asegura un tamaño medio
de las dianas a escala de la imagen de unos 0.035 mm de diámetro, lo cual suponen
dianas de unos 7 píxeles de diámetro, claramente identificables y medibles tanto
manualmente como con técnicas automáticas.
Diana de vinilo (r= 11cm) empleada para el apoyo fotogramétrico.
50

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
f [mm] D [m] Res [mm] GSD [mm] R [mm] R [pix] N[pix]
16 50 0.0048 15.3 110 7.2 162 Tabla 6. Simulación tamaño dianas
En resumen, se ubicaron11 dianas por toda la zona, de modo que en cada foto
apareciese el mayor número de puntos de apoyo posible, lo más alejados posible uno del
otro dentro de la misma foto para así abarcar una mayor área a diferentes alturas dentro
de la ladera.
2.4.3. Ejecución del vuelo mediante UAV
La ejecución del vuelo se realizó conforme a lo establecido en la fase de
planificación de vuelo. Tal y como se ha indicó en el apartado anterior, se optó por
realizar 3 pasadas cenitales a altura de vuelo constante sobre la vertical del terreno (a 50
m), y tres pasadas inclinadas con el eje de la cámara perpendicular al plano del talud y a
una distancia constante de la ladera de 50 m. Con el gestor de la misión de vuelo del
sistema AscTec, se introdujeron los parámetros planificados en el software AscTec
AutoPilot Control. Estos parámetros son las coordenadas de los puntos de disparo en el
sistema de referencia elegido y los ángulos de inclinación de la cámara tanto para las
tomas verticales como las inclinadas.
De cara a ejecutar el vuelo hubo que tener en cuenta las condiciones apropiadas
para la correcta ejecución de la misión:
Horario: tal que la altura del Sol sobre horizonte sea mayor a 40°, evitando
horas de mucha sombra.
Meteorología: Se tomaron los datos en un día de cielo despejado, antes de
medio día, con poca sombra y escaso viento que dificultase el vuelo.
Zona de despegue y aterrizaje: despejada en un entorno de unos 10 m.
51
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
OPERAR CON ASCTEC FALCON 8:
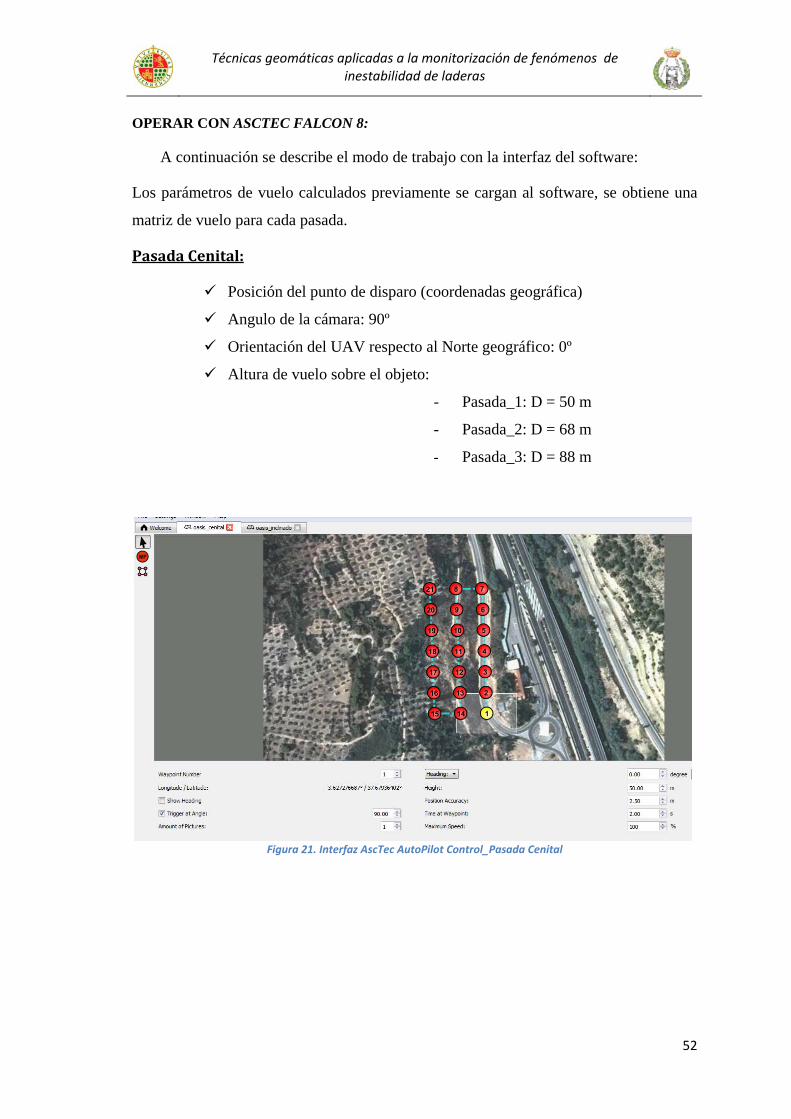
A continuación se describe el modo de trabajo con la interfaz del software:
Los parámetros de vuelo calculados previamente se cargan al software, se obtiene una
matriz de vuelo para cada pasada.
Pasada Cenital:
Posición del punto de disparo (coordenadas geográfica)
Angulo de la cámara: 90º
Orientación del UAV respecto al Norte geográfico: 0º
Altura de vuelo sobre el objeto:
- Pasada_1: D = 50 m
- Pasada_2: D = 68 m
- Pasada_3: D = 88 m
Figura 21. Interfaz AscTec AutoPilot Control_Pasada Cenital
52

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Pasada Inclinada:
Posición del punto de disparo (coordenadas geográfica)
Angulo de la cámara: 45º
Orientación del Falcon respecto al Norte geográfico: 270º (la línea de
vuelo coincide con el Norte Geográfico, pero el UAV está orientado
hacia la ladera: 0º+270º)
Altura de vuelo:
- Pasada_1: D = 42,33 m
- Pasada_2: D = 60 m
- Pasada_3: D = 77,67 m
Figura 22. Interfaz AscTec AutoPilot Control_Pasada Inclinada
Modo de vuelo:
Debido a que la planificación del vuelo es un cálculo previo, lo más lógico es volar
en modo automático “GPS Mode”, el cual permite:
- Un control automático del UAV.
- Se mantiene la orientación y nivelación del UAV y de la cámara en vuelo
53

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
- Se mantiene la posición, una vez alcanzado el way point, dentro de los límites
de la precisión del GPS (2-5m aprox.).
- Se mantiene su altura dentro de los límites del control de altura (1-3m aprox).
- Se compensa la deriva debido al viento. La compensación permite volar con
seguridad hasta un límite máximo de velocidad del viento de 10 m/s.
- En el supuesto que falle el funcionamiento GPS, se puede manipular desde
la estación de control.
Ejecutar la misión:
Pulsando el botón “Start Mission”, el vehículo se desplaza al primer punto de
disparo, realiza la toma de la fotografía y se desplaza automáticamente a todos los
puntos de disparo de uno en uno.
El lugar de lanzamiento y aterrizaje debe ser libre de obstáculos y despejado para el
buen funcionamiento del GPS (área mínima 100m2).
Fotos tomadas: se utilizan 39 fotos de las tomadas en campo, que son las que
mejor abarcan la zona objeto de estudio.
A continuación en las Figura 23 y Figura 24 se muestran los esquemas con la
posición de la cámara en el momento de cada disparo para las 3pasadas cenitales y las 3
inclinadas.
54

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 23. Pasadas Cenitales
Figura 24. Pasadas Inclinadas
55
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
TRATAMIENTO DE LOS DATOS
Los datos brutos obtenidos por ambas técnicas se han tratado de forma individual
hasta referenciarlos al mismo sistema de referencia global, de forma que se permita su
comparación y análisis conjunto.
2.4.4. Orientación del bloque fotogramétrico
Para orientar el bloque fotogramétrico se emplea el software fotogramétrico
AgisoftPhotoScan. El proceso de orientación sigue un esquema parecido al método
clásico de orientación de pares estereoscópicos de orientación en dos pasos (two steps).
En primer lugar se realiza la formación del modelo fotogramétrico de todo el bloque en
un sistema de referencia arbitrario (Orientación Relativa). El ajuste del bloque se realiza
mediante un proceso automático de matching que enlaza todas las imágenes del bloque.
Posteriormente, se concluye con la fase de orientación absoluta, dotando de
coordenadas oficiales al proyecto, gracias a los puntos de control.
A continuación se desarrolla el proceso que se lleva a cabo para orientar el bloque
fotogramétrico mediante estación fotogramétrica digital (AgiSoft PhotoScan).
El primer paso consiste en cargar las fotos que integran el bloque. Los parámetros
iniciales de orientación interna de la cámara se obtienen de forma automática, utilizando
los datos recogidos en el fichero EXIF (exchangeable image information file, donde se
recogen los metadatos del archivo de imagen) que proporciona, entre otra información
útil, las características de la cámara utilizada (dimensiones del sensor, resolución,
distancia focal nominal, etc.) y algunos datos adicionales de las imágenes importadas
del vuelo (autorotación de la imagen, datos de exposición, etc.). La orientación interna
se realiza automáticamente a partir de los datos EXIF o de los parámetros de calibración
de la cámara si se dispone de ellos, los cuales pueden ser introducidos manualmente o
importados desde diferentes formatos habituales. Estos parámetros pueden ser
aproximados, ya que si la geometría del bloque es apropiada (con número suficiente de
tomas, fotografías inclinadas, etc.) se permite la posterior autocalibración del bloque y
el refinamiento de los parámetros internos.
Una vez cargadas las fotos, lo siguiente es realizar la orientación relativa. En este
paso PhotoScan determina la posición y orientación de la cámara para cada imagen y
construye una densa nube de puntos homólogos en un sistema de referencia arbitrario.
56

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 25. Puntos correlados en el proceso de orientación relativa
Para referenciar el modelo a un sistema de referencia global se necesitan al menos
tres puntos para poder realizar la transformación.
En el presente proyecto se pasa al sistema global de coordenadas empleando los
puntos de control medidos en campo. Primero se marcan en las fotos dichos puntos
posicionando el marcador en el centro de la diana, hay que marcar cada punto en todas
las fotos en las que aparece. Se repite el proceso para todos los puntos.
Una vez marcadas las dianas en todas las fotos se importa el fichero .txt que
contiene las coordenadas UTM correspondiente a estos puntos. Se calcula la
transformación tridimensional de coordenadas (Helmert 3D) y se estiman los residuos y
el error medio cuadrático de los puntos de control.
En la Figura 26se puede observar la distribución de los PC sobre la ladera.
57

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 26. Situación de los Puntos de Control fotogramétricos
Precisión de los puntos de control: refleja la precisión en posición de los PC
trasrealizar la Transformación 3D con PhotoScan.
PC σX (m) σY(m) σZ (m) σmed(m) σpix(m) d100 0.045 0.007 -0.021 0.050 0.19 d101 0.002 0.009 -0.010 0.014 0.33 d102 0.001 0.019 0.013 0.023 0.40 d103 -0.011 -0.001 0.021 0.024 0.21 d104 -0.011 -0.028 -0.030 0.043 0.19 d105 0.013 -0.012 0.001 0.018 0.22 d106 -0.017 -0.002 -0.015 0.022 0.19 d107 0.040 -0.011 -0.012 0.043 0.23 d108 -0.032 0.029 0.016 0.046 0.21 d109 -0.014 0.010 0.034 0.039 0.29 d110 -0.016 -0.004 0.014 0.022 0.23 d111 -0.002 -0.016 -0.010 0.020 0.20 Total 0.022 0.015 0.019 0.033 0.24
Tabla 7. Precisión de los Puntos de control en el modelo orientado
58

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Optimización del proceso de orientación: PhotoScan estima los parámetros de
orientación interna y externa durante el proceso de orientación a partir de datos de las
fotos y datos de georreferenciación, por lo tanto se pueden acumular errores al final de
la orientación. Hay muchos factores como el solape entre las fotos, forma y superficie
del objeto que pueden dar lugar a deformaciones no lineales del modelo final.
Durante la georreferenciación el modelo se transforma linealmente mediante una
transformación 3D de semejanza. Esta transformación solo puede compensar algunos
tipos de errores lineales, la componente no lineal del error junto con otros errores
también lineales (afinidad por ejemplo) no se elimina. Estos errores residuales, pero
significativos, pueden eliminarse mediante la optimización de coordenadas de puntos y
parámetros de la cámara. Durante la optimización PhotoScan ajusta las coordenadas de
los puntos estimados y los parámetros de la cámara minimizando los errores. La
exactitud de la georreferenciación puede mejorar significativamente tras la optimización
llevada a cabo mediante una autocalibración en la que se pueden seleccionar los
parámetros de la cámara necesarios o que resulten significativos: distancia principal, f;
coeficientes de afinidad: cx, cy; coeficientes de distorsión radial simétrica, k1, k2, k3.
2.4.5. Generación de la nube de puntos
PhotoScan permite generar y visualizar una nube de puntos densa, que es capaz de
definir el objeto. Así el objeto, la ladera en este caso, ha quedado definida con una
resolución alta, con un total de 7.340.000 puntos. Estos puntos representan unos datos
brutos sin poder diferenciar que puntos definen la ladera en si o que puntos pertenecen
a objetos o artefactos sobre la ladera (vegetación, mallas de protección contra caídas de
rocas, postes, señales, etc.). Por tanto es necesaria la posterior edición de la nube de
puntos, no siendo efectivas para ello las herramientas de PhotoScan.
Por ello, se ha exportado la nube de puntos para su posterior tratamiento y análisis.
El fichero de exportación contiene coordenadas 3D (X, Y, Z) y el valor RGB del punto.
59

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 27. Nube de puntos generada por técnica fotogramétrica
2.4.6. Elaboración de los MDEs de la zona afectada
En este punto del proyecto se tiene los datos referidos a un sistema de coordenadas
oficial. Es necesario realizar un procesamiento de la nube de puntos que consiste en la
transformación de las nubes de puntos en producto adecuado para el análisis que se
pretende.
Los productos que se pretenden elaborar en el presente trabajo son unMDS y un
MDT texturizados, con los que será posible hacer la comparación multitécnica y el
análisis multitemporal, así como una clasificación de los elementos que se encuentran
sobre la ladera.
MDS – representa la superficie de cota máxima, es decir la superficie será
observada desde arriba. Representa el terreno y todos los objetos que se encuentren
sobre el mismo.
MDT – representa la superficie del suelo desnudo en formato digital, considerado
como la frontera entre el la tierra firme y la atmosfera o un objeto unido a él (edificio,
vegetación, etc.).
60
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 28. Clasificación de la superficie
2.4.6.1. Elaboración del MDS
Es una representación de la superficie de la ladera con todo lo que se encuentra
sobre la misma (vegetación, artefactos, construcciones, etc.). Se obtiene a partir de los
datos brutos sin clasificar, aunque es necesario hacer una mejora de estos datos
mediante un filtrado por ruido, remuestreo, filtrado por polígono recortando solamente
la zona de interés. Todo el proceso se lleva acabo empleando el software Maptek I-Site .
Filtrado del ruido: El primer paso es eliminar el ruido de los datos, se aplica un
filtro por puntos aislados, elimina los puntos que se encuentran a una cierta distancia del
resto, algunos hay que eliminarlos de forma manual.
Remuestreo: Al crear una malla el número de triángulos es más del doble que el
número de puntos. Tal cantidad de datos dificulta el procesado y, en ocasiones,
desborda la capacidad de cálculo del procesador, por lo que es necesario reducir el
número de puntos antes de crear el modelo. Se aplica un filtrado por separación
mínima, por ejemplo un punto cada 10 cm. Se reduce el tamaño de la nube de puntos sin
perder su forma geométrica. Una vez limpiada la nube de puntos se procede a la
elaboración de los modelos.
Modelado de la superficie: se genera una malla que conecta los puntos con
pequeños triángulos En este caso se ha aplicado una triangulación topográfica para
generar la malla. Ha sido necesario aplicar un giro a la ladera, ya que la triangulación
topográfica se genera sobre el plano XY, y la ladera presenta una inclinación de unos
30º sobre este plano, con ello se evitan ocultaciones. Este giro, una vez hecha la
triangulación será necesario deshacerlo.
61

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 29. Modelado de la superficie
Al generar la superficie se recortan los triángulos con lado mayor a 2 m, evitando
errores de triangulación, especialmente en los bordes. Además hay que aplicar un
suavizado al modelo generado.
Se han generado varias superficies con este tipo de modelado:
• MDS con datos fotogramétricos campaña 29/04/2014
• MDS con datos fotogramétricos campaña 07/03/2014
Los MDSs se emplean en el estudio multitécnica y de deformación de la ladera en
un periodo de tiempo.
2.4.6.2. Elaboración del MDT
Se trata de representar la superficie del suelo desnudo. Hay que filtrar los datos
hasta que queden solo los puntos considerados terreno que son con los que se genera el
MDT. Se realiza un filtrado para los datos fotogramétricos y otro para los datos escáner.
Clasificación de los datos fotogramétricos
En primer lugar se procede a elaborar la clasificación empleando PhotoScan, este
software tiene la capacidad de exportar entre otros MDSs y MDTs.
Para exportar el MDT el software clasifica los datos y emplea solo los que
considera terreno para construir la malla. El proceso es el siguiente:
- Clasificar puntos terreno utilizando el comando disponible en las herramientas.
- Construir la malla basada en puntos terreno únicamente.
- Exportar DEM georreferenciado.
62

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Tras observar la clasificación realizada automáticamente se llega a la conclusión de
que no es suficiente o más bien errónea. Sobre la ladera se encuentran rocas de gran
tamaño, que este software las clasifica como no perteneciente al terreno, las zonas de
vegetación baja se suaviza tanto que se confunde con el terreno.
Por tanto, se ha optado por editarlos datos empleando una estación fotogramétrica
estereoscópica (Socet Set). Para ello es necesario crear un proyecto, importar la nube
de puntos mejorada, las fotos de la toma cenital y los datos de la cámara. El filtrado
consiste en:
- Crear el modelo mediante una malla de triángulos (formato TIN)
- Edición interactiva del modelo soportada mediante visión 3D, eliminando las zonas
con vegetación y puntos erróneos.
Figura 30. Edición con Socet Set
- Exportar la nube de puntos editada.
Para obtener la superficie definitiva se importa la nube de puntos en el software
MaptekI-site y se procesa. Al igual que antes se genera la superficie girando un plano
teórico que engloba los puntos de la ladera y hacerlos coincidentes con el plano XY.
- Girarlos puntos de ladera hasta coincidir con el plano XY.
- Generar la superficie topográfica con los puntos importados.
- Mostrar nuevamente todos los puntos de la nube (aplicando el filtrado
correspondiente).
- Filtrar por proximidad a la superficie, se añaden los puntos que se encuentra
a cierta distancia de la superficie, se han añadido puntos de 5 en 5 cm
diferencia de cota.
- Generar una nueva superficie topográfica con los puntos añadidos.
63

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
- Iterar el proceso hasta que se incluyen todos los puntos considerados
terreno.
Fue suficiente iterar dos veces para conseguir como resultado un modelo digital del
terreno (Figura 31) eliminando finalmente los puntos que representan la vegetación que
se encuentra sobre el talud (representados en laFigura 32) y depurar los datos.
Figura 31. MDT obtenido mediante técnica fotogramétrica
64

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 32. Clasificación de la vegetación
65

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.5. TLS.
2.5.1. Planificación
Si bien no hay un proceso estándar para la planificación de un levantamiento con
TLS hay que tener en cuenta una serie de factores que, entre otras razones, además de
facilitar y optimizar el trabajo pueden influir en el resultado final. Algunas
consideraciones son:
- Determinar el objetivo final y el resultado que se pretenden obtener:
productos finales, desde planos 2D, modelos 3D o animaciones.
- El análisis del área a levantar: hay que recopilar información sobre el área
objeto de estudio para tener una idea de su complejidad y optimizar las
labores de campo.
- Analizar capturas anteriores por cualquier técnica o la cartografía existente
puede ayudar a elaborar una correcta planificación.
El escáner láser terrestre es adecuado para la toma de datos cuando: las superficies
a levantar son muy complejas, hay ausencia de formas geométricas definidas (que
impiden emplear otras técnicas), surge la necesidad de elaborar documentación 3D,
existen necesidades de medición de superficies en vez de mediciones puntuales, etc.
Antes de proceder a escanear se debe determinar la posición óptima del escáner, de
forma que se garantice una máxima cobertura y precisión. Hay que comprobar que las
posiciones cubren la mayor área posible sin obstáculos en la línea de vista y que se
producen las menos ocultaciones posibles.
Se debe comprobar que se cumplen los alcances mínimos y máximos para alcanzar
la precisión requerida. Cuanto mayor sea la distancia al objeto menor será la precisión y
la resolución. Además se debe tener en cuenta que con ángulos de incidencia muy
agudos el haz del láser puede no reflejarse muy bien o deformarse en exceso su huella,
por lo que la precisión del escáner se puede ver comprometida y el número de retornos
reducirse.
Figura 33. Deformaciones según el ángulo de toma del escáner
66

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.5.2. Planificación de la Red de Apoyo
Al igual que en el proceso fotogramétrico se emplean puntos de coordenadas
conocidas (puntos de control o de apoyo) para orientar los datos escáner a un sistema de
referencia global. Dichos puntos deben aparecer en la nube de puntos, por lo tanto se
colocan antes de realizar el barrido. No se utilizan los mismos que en el apoyo
fotogramétrico básicamente por que los fotogramétricos deben abarcar toda la zona de
la ladera, y los utilizados en TLS no es necesario ya que solo se emplean como puntos
de comprobación o chequeo (check points), utilizando en la orientación las bases de
estacionamiento del escáner láser. Para su ubicación se emplean las mismas marcas
preseñalizadas y se miden mediante técnicas GNSS, por lo tanto su observación, cálculo
y tratamiento en campo es igual, independientemente de la técnica (fotogrametría o
TLS) para la cual se emplean.
Los puntos de control son fijos y fácilmente identificables. En cuanto a suposición,
las dianas que se emplean deben estar distribuidas lo más ampliamente posible, no solo
en la dirección X Y, sino también en la dirección del eje Z. Estos puntos tendrán
coordenadas oficiales y servirán para referenciar todo el bloque o como puntos de
chequeo, como es el caso.
2.5.3. Ejecución de la toma de datos
Estacionamiento del escáner:
El estacionamiento del escáner sigue generalmente un procedimiento similar al de
una estación total:
• Montaje del escáner en trípode: hay que asegurar que el trípode se sitúa en un suelo
estable, a la altura de los ojos, como en el escaneo también se incluye la carretera es
mejor una posición más alta para proporcionar mejor ángulo de inclinación.
• Nivelar el escáner lo más preciso posible con sus respectivos niveles.
En cada punto de estación el TLS tiene el origen en su propio sistema de
coordenadas, en la montura del equipo se coloca un receptor GNSS para determinar su
posición absoluta. Las coordenadas de estas estaciones permitirán transformar todos los
puntos del escaneo a un sistema de coordenadas global (oficial).
67

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Una vez ubicado el equipo TLS se procede al escaneo de la ladera, definiendo
previamente ciertos parámetros de la toma.
Definición del área a escanear:
El escáner Leíca tiene en su menú las pestañas necesarias para definir rápidamente
el área de escaneado. Por el contrario, con el escáner Optech primero se captura una
imagen de la escena y luego se selecciona sobre la misma el área a escanear.
Resolución
Es muy importante elegir la correcta resolución, se define como la distancia entre
dos puntos medidos consecutivamente y de esta manera se determina la densidad de la
nube de puntos. Queda determinada por el detalle de menor tamaño que se necesita
reconocer. En superficies cuya morfología es muy compleja como es el caso, se
necesita mayor número de puntos para modelar el objeto. La resolución del escáner
estará definida para una cierta distancia, a mayor distancia menor resolución. Se ha
fijado una resolución de 2,5 cm a una distancia de 50m empleando Leica C10, y una
resolución de 3,5 cm a una distancia de 150 m empleando Optech Ilris 3D.
Toma de datos
Una vez determinado el campo de visión y fijado la resolución más adecuada se
puede empezar a escanear. El proceso de escaneado es totalmente automático, el escáner
se mueve al punto de inicio y empieza a tomar puntos, estos puntos se almacenan en la
memoria interna del escáner. Se pueden visualizar en pantalla y dan una idea del área
escaneada. Tras el escaneo se comprueba si hay alguna obstrucción imprevista que
provoquen zonas ocultas. Como las dianas se han distribuido por la zona antes de
realizar la toma, deben aparecer en el barrido perfectamente identificables.
Se ha optado por realizar cuatro estacionamientos: dos de corto alcance empleando
el escáner Leica C10, para ello nos situamos en un pequeño talud enfrentado a la ladera,
y dos de largo alcance empleando el escáner Optech Ilris 3D, situados en un talud
enfrentado a la zona pero más alejado y a mayor cota. Esta elección se debe a que con
los escaneos de corto alcance queda mejor definida la parte baja de la ladera, la parte
alta del talud presentaría zonas de muchas ocultaciones, debido a que los ángulos de
toma serían muy agudos desde esta posición. La zona superior de la ladera queda mejor
68

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
definida en los escaneos de largo alcance además la precisión es mayor empleando
ángulos de toma más abiertos.
Figura 34. Posición del escáner con respecto a la ladera
La posición de las cuatro estaciones es conocida, ya que a ambos TLS se le puede
instalar una montura con una antena GNSS. Además, gracias a su distribución se
pueden emplear estos puntos en la orientación del bloque compuesto por todos los
escaneos a un sistema de referencia común, empleando el resto de puntos de control
medidos por técnica GNSS como puntos de chequeo.
Figura 35. Posición de las estaciones de escaneo respecto de la ladera
2.5.4. Orientación mediante Maptek I-Site de los datos escaner
Como ya se mencionó, la ladera es demasiado grande como para poder escanearse
desde una misma posición, por lo que se han necesitado varios estacionamientos del
escáner. Así, nos encontramos con cuatro escaneos diferentes, correspondientes a cada
69

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
una de las estaciones en campo, por lo que es necesario referenciar todos los escaneos a
un mismo sistema de referencia global, para lo que se siguen los siguientes pasos.
Orientación de los escaneos en un sistema local: Cada escaneo está definido en su
sistema de coordenadas escáner local correspondiente a cada estación. Se define el
sistema interno local del instrumento teniendo en cuenta que lleva en su montura una
antena GNSS:
Origen de coordenadas:Leica (0, 0, 0.1175)m
Optech (0, 0, 0.28) m
Lo primero es referenciar todos los escaneos entre sí, ya que al importar los datos,
las nubes de puntos de cada barrido están orientadas de forma independiente, cada una
en su propio sistema con origen en su estación de escaneo. Por otro lado, es
imprescindible que las nubes de puntos tengan un solape suficiente entre sí para poder
correlacionarlas y fusionarlas en una única nube global con un sistema de referencia
único para todos los datos. En una primera aproximación se traslada y gira una nube de
puntos con respecto a otra de referencia, para poder comenzar el proceso de correlación.
El procedimiento inicial de orientación o referenciación relativa consiste en
correlacionar los escaneos por características superficiales similares. Es un proceso
iterativo hasta obtener un resultado adecuado, con una precisión inferior a la resolución
de los datos. En este proceso se toma una nube de puntos como fija o de referencia y las
otras nubes de puntos se van correlando sucesivamente con la primera. Se han orientado
los escaneos realizados con el escáner Leíca por un lado y los realizados con el sistema
Optech por otro. Finalmente, se han referenciado entre sí ambos conjuntos de datos.
Como resultado todas las nubes de punto están integradas en una única nube cuyo
sistema de referencia es local y coincidente con el de la nube de puntos considerada
inicialmente como fija.
Figura 36. Origen SR local del escáner
70

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Orientación al sistema global: En el siguiente paso, la nube de puntos en el sistema
local se debe georreferenciar para situarla en el sistema de coordenadas global (oficial).
Para ello es necesario conocer al menos tres puntos en ambos sistemas que estén
adecuadamente distribuidos. Sí se conocen más de tres puntos se realiza un ajuste por
mínimos cuadrados.
Para llevar a cabo el proceso se aplica una técnica de georreferenciación indirecta
que implica el uso de dianas o puntos de coordenadas conocidas. Como ya se mencionó
en el apartado de planificación, se han medido puntos de control y puntos de estación
del TLS mediante técnicas GNSS. Así, se han distribuido 6 dianas sobre la ladera y se
ha estacionado cuatro veces: dos estaciones para escaneos de largo alcance y dos de
corto alcance.
Ya que la distribución espacial de las estaciones de escaneo es adecuada (está
distribuidas frente a la ladera y colocadas a dos alturas diferentes), se ha optado por
emplear los cuatro puntos de estación. Si la las estaciones hubiesen estado alineadas la
orientación hubiese sido débil. Otra opción hubiese sido utilizar para la transformación
las seis dianas distribuidas sobre el talud, pero se ha preferido emplear estas dianas
como puntos de comprobación (chequeo) externos para así poder estimar una posible
propagación de errores.
El proceso, llevado a cabo con el software Maptek I-Site, es el siguiente:
- En el paso anterior se crean los puntos de estación de cada escaneo en su sistema
local
- Crear puntos de enlace, marcar los centros de las dianas. Para ello se aplica un
filtrado a la nube por intensidad de los puntos que constituyen las marcas de las
diana, de esta forma solo serán visibles las dianas. Para marcar el punto central se
ajusta los puntos a un círculo, cuyo centro representa el centro de la marca que es
donde se posiciono la antena GNSS al medir.
- Importar el fichero .txt con las coordenadas de los puntos de control medidos en
campo (coordenadas de las estaciones de escaneo).
71

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
- Seleccionar los puntos de escaneo, estación y enlace.
- Medir los puntos homólogos, eligiendo como fijos los puntos de estación TLS.
- Tras realizar la transformación se calculan los puntos de chequeo (dianas) y se
comprueba la precisión obtenida en base a los residuos obtenidos. LaTabla 8muestra
la diferencia (residuos) entre las coordenadas medidas de estos puntos y las
calculadas tras realizar la orientación global del bloque. Puede apreciarse como los
valores de los residuos son concorde a la resolución de barrido dándose por correcta
la referenciación de la nube global en el sistema final de coordenadas.
ID σX (m) σY (m) σZ (m) RMS (m) d1 0.021 -0.001 0.002 0.020 d2 0.034 0.010 -0.006 0.035 d3 0.042 0.012 -0.005 0.044 d4 0.034 0.016 -0.020 0.042 d5 0.039 0.022 -0.013 0.046 d6 0.039 0.025 -0.011 0.047
Tabla 8. Precisión de los puntos de chequeo
72

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
2.5.5. Elaboración de los MDEs mediante técnica TLS
2.5.5.1. Elaboración del MDS
El proceso de elaboración del MDS es el mismo que el empleado en la obtención
del MDS de los datos fotogramétrico. Se consigue una representación de la superficie
de la ladera con todo lo que se encuentra sobre la misma (vegetación y objetos). Al
igual que antes, se obtiene a partir de datos brutos sin clasificar, pero mejorados
mediante un filtrado por ruido, remuestreo y filtrado por polígono, recortando solamente
la zona de interés. Todo el proceso se lleva acabo empleando el software Maptek I-Site.
2.5.5.2. Elaboración del MDT
Clasificación de los datos TLS
Se dispone de los datos brutos mejorados. Para clasificar los datos se realiza un
proceso complejo de filtrado que consta de los siguientes pasos:
- Filtrado topográfico proyectivo a 1 m, se extraen solo los puntos más bajos del objeto
con los que se genera una superficie base a la que se añaden puntos hasta conseguir
la superficie final del modelo. En este tipo de filtrado los rayos proyectivos son
perpendiculares al plano XY, hay que girar la ladera coincidente con este plano para
hacer los rayos proyectivos perpendiculares a la ladera y, de este modo, evitar errores
en la generación de la superficie.
- Generar la superficie base
- Filtrar mostrar todos los puntos del escaneo
- Filtrar por proximidad a la superficie. Se añaden los puntos que están a cierta
distancia de la superficie. Añadimos puntos de 5 en 5 cm.
- Con los puntos que se ha generado la superficie base y los añadidos en el paso
anterior se genera una nueva superficie.
- Se itera el proceso hasta conseguir el resultado deseado, hasta que se añadan todos
los puntos que representan la superficie terreno del talud.
73

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
- Hay que añadir de forma manual algunos puntos, los que representan las rocas de
gran tamaño, ya que tienen cota parecida a la vegetación, y si se añaden en proceso
iterativo, se introduciría vegetación en la representación del MDT.
Tras conseguir el MDT de la zona, se clasifica el resto de puntos del escaneo que
no han sido incluidos en la elaboración de esta superficie como vegetación. Se obtiene
como resultado final una superficie del suelo desnudo de la ladera (Figura 37) y la
representación de la vegetación que se encuentra unida al talud (Figura 38). A
continuación se muestran los resultados obtenidos.
Figura 37. MDT obtenido por técnica TLS
74

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 38. Clasificación del terreno mediante técnica TLS
75

3. ANÁLISIS DE LOS RESULTADOS

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.1. CONTROL DE LA CAPTURA DE LA INFORMACIÓN
3.1.1. UAV
En este apartado se va a analizar si la captura de los datos mediante UAV se ha
efectuado según la planificación previa. Se ha comprobado el nivel de exactitud cuando
se emplea este tipo de tecnología en la captura de los datos. Para ello se compara la
posición planimétrica y estabilidad altimétrica y angular del sensor. Las siguientes
tablas muestran este análisis.
LaTabla 9recoge los cálculos realizados en la planificación del vuelo. Contiene
posición de los puntos de disparo, altura de vuelo respecto a la zona de despegue y
ángulos de giro de la cámara (ángulo de inclinación y cabezeo).
La Tabla 10presenta los resultados obtenidos para los parámetros de orientación
externa (POE) de cada una de las imágenes de las distintas pasadas una vez realizada la
orientación. La tabla recoge información sobre: Coordenadas de los puntos de disparo
(X, Y, Z UTM30) referidas al ETRS89, los valores angulares (𝝎, 𝝋, 𝜿). Además se
calculan unos valores medios de la altura de vuelo y ángulos de giro de la cámara para
cada pasada.
En la Tabla 11se cuantifican las variaciones encontradas:
- Comprobar la posición GPS del sensor: estimar diferencia entre coordenadas
planimétricas calculadas en la planificación y las obtenidas tras la orientación del
bloque (dX, dY, dXY), la media de las mismas, así como la desviación estándar de
estos datos, que refleja cuanto varían respecto a la media. Para la posición
altimétrica se estima la variación en altura (dZ) de cada punto de disparo con
respecto a la media correspondiente, así como su desviación estándar.
- Comprobar la estabilidad angular del sensor, de igual modo se determina la
variación de los ángulos de giro de las cámaras con respecto a la media (d𝝎, d𝝋,
d𝜿) así como su desviación estándar (cuanto varían respecto a la media).
Estos datos son suficientes para determinar los sistematismos del sensor.
77

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Pasada Cenital ID Foto X 0(m) Y0(m) D(m) Inclinación ⁰ Heading⁰
1
DSC00174 444687.580 4170425.840
50 90 0
DSC00175 444686.748 4170452.081 DSC00176 444685.916 4170478.323 DSC00177 444685.084 4170504.564 DSC00178 444684.253 4170530.805 DSC00179 444683.421 4170557.047 DSC00180 444682.589 4170583.288
2
DSC00181 444650.205 4170583.288
68 90 0
DSC00182 444651.037 4170557.047 DSC00183 444651.869 4170530.805 DSC00184 444652.701 4170504.564 DSC00185 444653.533 4170478.323 DSC00186 444654.365 4170452.081 DSC00187 444655.197 4170425.840
3
DSC00188 444622.813 4170425.840
88 90 0
DSC00189 444621.981 4170452.081 DSC00190 444621.149 4170478.323 DSC00191 444620.317 4170504.564 DSC00192 444619.486 4170530.805 DSC00193 444618.654 4170557.047 DSC00194 444617.822 4170583.288
Pasada Inclinada ID Foto X 0(m) Y0(m) D(m) Inclinación ⁰ Heading⁰
1
DSC00196 444704.470 4170567.070
42.33 45 270
DSC00197 444704.110 4170542.390 DSC00198 444703.750 4170517.710 DSC00199 444703.390 4170493.030 DSC00200 444703.030 4170468.350 DSC00201 444702.670 4170443.670
2
DSC00202 444685.000 4170443.650
60 45 270
DSC00203 444685.360 4170468.330 DSC00204 444685.720 4170493.010 DSC00205 444686.080 4170517.690 DSC00206 444686.440 4170542.370 DSC00207 444686.800 4170567.050
3
DSC00208 444669.130 4170567.070
77.67 45 270
DSC00209 444668.770 4170542.390 DSC00210 444668.410 4170517.710 DSC00211 444668.050 4170493.030 DSC00212 444667.690 4170468.350 DSC00213 444667.330 4170443.670
Tabla 9. Datos planificados
78

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Pasada Cenital ID Foto X 0(m) Y0(m) Z0 (m) Omega ⁰ Phi⁰ Kappa⁰
1
DSC00174 444686.990 4170425.561 687.061 -5.7991 2.0260 1.9472 DSC00175 444691.697 4170448.039 685.457 -0.6736 7.0833 -14.2667 DSC00176 444687.462 4170474.390 686.102 -0.1882 4.1392 0.0203 DSC00177 444685.058 4170500.420 685.711 -0.1137 3.0494 0.8203 DSC00178 444685.220 4170526.877 685.745 -0.2299 2.5641 -3.9588 DSC00179 444684.218 4170552.913 685.453 -1.0510 3.2816 -1.5107 DSC00180 444683.613 4170580.011 685.167 -0.3129 3.1225 -5.9841
Media 685.814 -1.1955 3.6094 -3.2761
2
DSC00181 444652.387 4170580.452 702.721 -3.0411 7.0258 -4.7010 DSC00182 444651.095 4170556.048 703.550 -5.7610 2.4895 0.3964 DSC00183 444651.690 4170529.841 703.549 -6.9988 0.9461 2.6112 DSC00184 444653.646 4170504.279 703.540 -6.9671 0.7195 6.1669 DSC00185 444654.327 4170478.096 703.749 -6.3285 0.7678 3.8218 DSC00186 444654.548 4170451.214 703.850 -5.5862 2.0713 1.1288 DSC00187 444656.104 4170424.570 704.161 -5.2489 2.8657 1.2562
Media 703.589 -5.7045 2.4122 1.5258
3
DSC00188 444625.842 4170423.870 722.578 -3.6268 4.0727 -0.3825 DSC00189 444623.126 4170448.406 722.747 -0.6665 2.6772 -2.4434 DSC00190 444621.033 4170474.525 722.868 -2.5051 2.5381 -2.1121 DSC00191 444621.373 4170500.618 722.552 -1.1237 2.6545 2.3614 DSC00192 444620.031 4170527.913 722.395 -0.1344 2.0428 -2.8276 DSC00193 444619.196 4170553.515 722.052 -0.2487 2.4160 -4.1905 DSC00194 444617.984 4170579.230 722.145 -0.3197 2.4399 -0.3637 Media 722.477 -1.2321 2.6916 -1.4226
Pasada Inclinada ID Foto X 0(m) Y0(m) Z0 (m) Omega ⁰ Phi⁰ Kappa⁰ 1 DSC00196 444705.003 4170562.961 680.411 3.2767 41.9801 88.6692
DSC00197 444702.940 4170540.971 680.333 6.1034 42.1526 70.7515 DSC00198 444704.143 4170516.132 680.045 5.1857 40.9582 73.6771 DSC00199 444703.253 4170491.303 679.830 4.4285 42.4002 74.3480 DSC00200 444703.030 4170466.507 680.015 5.2164 42.7259 73.4011 DSC00201 444702.529 4170442.386 679.917 5.8755 42.0383 71.7343 Media 680.092 5.0144 42.0426 75.4302
2 DSC00202 444684.733 4170440.923 695.280 2.9144 45.2991 79.7806 DSC00203 444684.103 4170465.314 696.236 13.2746 39.9431 67.0220 DSC00204 444685.206 4170489.521 696.600 9.7021 42.9444 77.5062 DSC00205 444684.299 4170514.647 696.201 6.7960 41.2839 79.1357 DSC00206 444686.392 4170539.908 696.176 9.9333 42.8509 78.4627 DSC00207 444686.991 4170565.437 695.879 10.7729 41.3544 76.7925 Media 696.062 8.8989 42.2793 76.4500
3 DSC00208 444670.665 4170566.023 712.035 12.8384 45.4541 68.1269 DSC00209 444667.959 4170541.834 712.821 8.6715 42.7425 70.8961 DSC00210 444669.121 4170517.254 713.166 4.6153 42.0564 74.3741 DSC00211 444667.990 4170492.267 713.064 3.7704 41.5803 74.3519 DSC00212 444668.341 4170467.980 713.202 3.8448 42.8355 74.5901 DSC00213 444667.383 4170443.245 713.075 3.1917 43.8307 74.8661 Media 712.894 6.1554 43.0832 72.8675
Tabla 10. POE resultados tras la orientación del bloque
79

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Pasada Cenital ID Foto dX (m) dY (m) dXY(m) dZ (m) dOmega⁰ dPhi⁰ dKappa⁰
1
DSC00174 0.590 0.279 0.653 -1.248 -4.604 1.583 1.329 DSC00175 -4.949 4.042 6.389 0.357 0.522 -3.474 -10.991 DSC00176 -1.546 3.933 4.226 -0.289 1.007 -0.530 3.256 DSC00177 0.026 4.144 4.144 0.103 1.082 0.560 2.456 DSC00178 -0.967 3.929 4.046 0.069 0.966 1.045 -0.683 DSC00179 -0.797 4.134 4.210 0.361 0.144 0.328 1.765 DSC00180 -1.025 3.277 3.434 0.646 0.883 0.487 -2.708
Media -1.238 3.391 3.872 0.000 0.000 0.000 -0.796 σ 1.785 1.404 1.695 0.623 2.0568 1.6636 5.5773
2
DSC00181 2.182 -2.836 3.578 0.868 2.663 -4.614 -3.175 DSC00182 0.058 -0.998 1.000 0.038 -0.056 -0.077 1.129 DSC00183 -0.179 -0.965 0.981 0.039 -1.294 1.466 -1.085 DSC00184 0.946 -0.285 0.988 0.048 -1.263 1.693 -4.641 DSC00185 0.794 -0.227 0.826 -0.160 -0.624 1.644 -2.296 DSC00186 0.183 -0.867 0.886 -0.262 0.118 0.341 0.397 DSC00187 0.908 -1.270 1.561 -0.572 0.456 -0.453 0.270
Media 0.699 -1.064 1.403 0.000 0.000 0.000 -1.343 σ 0.792 0.870 0.989 0.444 1.3526 2.2110 3.3731
3
DSC00188 3.029 -1.970 3.613 -0.101 -2.395 -1.381 1.040 DSC00189 1.145 -3.675 3.849 -0.270 0.566 0.014 -1.021 DSC00190 -0.116 -3.798 3.799 -0.391 -1.273 0.153 -0.689 DSC00191 1.056 -3.946 4.085 -0.076 0.108 0.037 -0.939 DSC00192 0.545 -2.892 2.943 0.081 1.098 0.649 -1.405 DSC00193 0.543 -3.532 3.574 0.425 0.983 0.276 -2.768 DSC00194 0.162 -4.059 4.062 0.332 0.912 0.252 1.059
Media 0.909 -3.410 3.704 0.000 0.000 0.000 -0.675 σ 1.037 0.740 0.389 0.300 1.3349 0.6445 2.1477
Pasada Inclinada ID Foto dX (m) dY (m) dXY(m) dZ (m) dOmega⁰ dPhi⁰ dKappa⁰
1
DSC00196 0.533 -4.109 4.143 -0.319 1.7377 0.0625 -13.2390 DSC00197 -1.170 -1.419 1.839 -0.241 -1.0890 -0.1101 4.6787 DSC00198 0.393 -1.578 1.626 0.047 -0.1713 1.0843 1.7531 DSC00199 -0.137 -1.727 1.732 0.262 0.5859 -0.3576 1.0822 DSC00200 0.000 -1.843 1.843 0.076 -0.2020 -0.6834 2.0291
DSC00201 -0.141 -1.284 1.292 0.175 -0.8611 0.0043 3.6959
Media -0.087 -1.993 2.079 0.000 0.000 0.000 0.000 σ 0.600 1.056 1.031 0.231 1.0354 0.5978 6.6209
2
DSC00202 -0.267 -2.727 2.740 0.782 5.9845 -3.0198 -3.3306 DSC00203 -1.257 -3.016 3.267 -0.174 -4.3758 2.3362 9.4279
DSC00204 -0.514 -3.489 3.526 -0.538 -0.8032 -0.6651 -1.0563
DSC00205 -1.781 -3.043 3.526 -0.139 2.1028 0.9954 -2.6857 DSC00206 -0.048 -2.462 2.463 -0.114 -1.0344 -0.5716 -2.0127 DSC00207 0.191 -1.613 1.625 0.183 -1.8740 0.9249 -0.3426
Media -0.613 -2.725 2.858 0.000 0.000 0.000 0.000 σ 0.758 0.644 0.742 0.447 3.5947 1.8543 4.7429
3 DSC00208 1.535 -1.047 1.859 0.858 -6.6831 -2.3709 4.7406 DSC00209 -0.811 -0.556 0.984 0.073 -2.5162 0.3408 1.9714
80

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
DSC00210 0.711 -0.456 0.845 -0.272 1.5400 1.0269 -1.5066 DSC00211 -0.060 -0.763 0.766 -0.170 2.3850 1.5029 -1.4844 DSC00212 0.651 -0.370 0.749 -0.308 2.3106 0.2478 -1.7225 DSC00213 0.053 -0.425 0.428 -0.181 2.9637 -0.7474 -1.9986
Media 0.347 -0.603 0.938 0.000 0.000 0.000 0.000 σ 0.804 0.258 0.487 0.441 3.8256 1.3907 2.7494
Tabla 11. Diferencias y variaciones de los datos de vuelo
Tras analizar los resultados, se puede observar que la planificación y ejecución
coincide a excepción de algunos valores anómalos, que pueden ser debidos a rachas de
viento. Para la toma se ha establecido una tolerancia de 3 m en el way point y 5 s hasta
alcanzar la posición. Estas anomalías coinciden casi siempre con las primeras
posiciones de disparo posiblemente debido a que el sensor no llega alcanzar su posición
dentro de las tolerancias fijadas. Los datos en general son correctos
Se puede observar un sesgo en el posicionamiento del UAV respecto a lo
planificado, pero una desviación estándar bastante pequeña, por lo que hace pensar que
el error es de inicialización del GPS manteniéndose bastante estable tras la
inicialización del mismo. En cuanto a los ángulos, se puede observar que son bastante
estables, dado que la desviación estándar respecto a la media está en torno a 3-5 grados.
Con estos resultados se puede concluir que la ejecución se ha realizado conforme a
la planificación, permitiendo cumplir los condicionantes geométricos del vuelo
fotogramétrico respecto a recubrimiento, escala y normalidad de las tomas.
3.1.2. TLS
La captura de los datos TLS se llevó a cabo según lo planificado, respetándoselas
posiciones de estacionamiento y el ángulo de barrido establecido para las diferentes
escenas. Por tanto, existe el solape necesario entre las distintas tomas para cubrir la zona
de interés y el dato obtenido es óptimo.
81

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.2. CONTROL DEL PROCESO DE ORIENTACIÓN
Para realizar cualquier tipo de análisis, como ya se mencionó, fue necesario referir
todos los datos a un mismo sistema de referencia global. Para ello se acomete el proceso
de orientación, el cuales llevado a cabo por distintos métodos según la técnica
empleada.
A continuación se presentan los resultados obtenidos en el proceso de orientación
para la campaña que ha sido realizada como parte de la aplicación práctica del presente
proyecto.
3.2.1. UAV
El control se lleva a cabo evaluando el error medio cuadrático de los puntos de
control una vez realizada la orientación.
En la siguiente tabla se muestra un resumen de los valores de las precisiones
obtenidas en la orientación del bloque fotogramétrico.
RMS σX (m) σY(m) σZ (m) σTOTAL(m) σpix(m) 0.022 0.0153 0.0186 0.032 0.25
Tabla 12. Valores estadísticos de los PC, en el ajuste del bloque fotogramétrico
Se obtuvo un error máximo en la orientación del bloque fotogramétrico de 3,2 cm.
Los puntos de control están medidos con una precisión media en torno a 2 cm y el
tamaño del GSD está en torno a unos 2 cm, por lo tanto los datos obtenidos son
correctos en cuanto a los requisitos exigidos por la precisión de este trabajo. Además,
los resultados de orientación se encuentran por debajo del límite aconsejado de 2/3 de
píxeles.
La orientación depende de la calidad posicional de los puntos de control empleados
y por tanto, el aumento del GSD de los vuelos no va a proporcionar mejores resultados
dado que los puntos de control limitan la precisión del trabajo.
Por otro lado, la distribución de los puntos de control debe ser adecuada para evitar
extrapolaciones en el cálculo del proceso de orientación. Esto es, el área encerrada por
el apoyo debe ser máxima y cubrir la zona de estudio.
82

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.2.2. TLS
Para el proceso de registro y georreferenciación de datos procedentes de técnica
TLS se ha utilizado control externo con los cuatro puntos de estacionamiento. Se ha
obtenido un error medio cuadrático de 0.036 m en la orientación global con Maptek I-
site.
Además, se realiza una comprobación externa de la calidad de la orientación
mediante la utilización de los puntos de chequeo (dianas) ubicados sobre el talud. Para
ello se realiza la diferencia entre las coordenadas obtenidas mediante GNSS y las
coordenadas de los mismos tras la transformación 3D rígida.
En la Tabla 13se muestran los valores medios de dicho análisis.
RMS σX (m) σY(m) σZ (m) σTOTAL(m) 0.035 0.014 -0.009 0.040
Tabla 13. Valores estadísticos de los puntos de chequeo TLS
Tras analizar los resultados se puede comprobar que para la componente
planimétrica existe un sesgo positivo, siendo más acusado en la coordenada X que en la
coordenada Y. Sin embargo, para la coordenada altimétrica este sesgo es negativo e
inferior al centímetro.
Los puntos empleados para realizar la transformación al sistema global se
encuentran fuera del área de estudio. Por ello, se produce extrapolación de la
orientación del objeto. Este efecto se ve reflejado en la parte superior de la ladera ya que
esta zona está más alejada de los puntos empleados en la orientación. Este fenómeno es
más acusado cuanto mayor sea la distancia a estos puntos. Los resultados, en cualquier
caso son coherentes con la precisión de los puntos utilizados en la referenciación de las
nubes de puntos así como con la resolución de la misma.
83

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.3. CONTROL DE SUPERFICIES
Adicionalmente se ha realizado un análisis a partir de las superficies. Para ello se
ha recurrido al cálculo de distancia entre los puntos de control asociados a una técnica
con respecto al MDS generado por la otra técnica. Esto es, los puntos de control
empleados para el vuelo fotogramétrico son los utilizados para el control de la
superficie obtenida mediante TLS, y viceversa.
3.3.1. UAV
Para el estudio de la superficie generada a partir de técnicas fotogramétricas se ha
empleado la totalidad de los puntos de control que fueron utilizados durante la captura
de datos con técnicas TLS. Dado que la distribución de dichos puntos solo cubre la
parte inferior del talud, el control se ajusta sobre dicha zona y no sobre todo el área que
cubre la superficie. Los resultados obtenidos se muestran en la Tabla 14.
ID D (m) 1 0.006 2 0.004 3 -0.030 4 -0.010 5 0.008 6 0.030
Prom (m) 0.015 σ(m) 0.012
Tabla 14. Control Superficie UAV
3.3.2. TLS
Para la ejecución del vuelo fotogramétrico se emplearon 11 puntos de control. Sin
embargo, sólo se emplean cinco puntos de control, que son los que se encuentran en el
área definido por los datos escáner. El resto de puntos están fuera de dicho área por lo
tanto no se pueden comprobar. Los resultados obtenidos se muestran en la Tabla 15.
ID D (m) 1 -0.009 2 0.022 3 0.038 4 0.014 5 0.032
Prom (m) 0.023 σ(m) 0.012
Tabla 15. Control Superficie TLS
84

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Como se puede observar, los resultados obtenidos son idóneos. El punto de control
con más error que chequea la superficie fotogramétrica se encuentra a unos3 cm de
distancia mientras que para la superficie TLS dista 4 cm, la desviación estándar de
ambos controles es de 1,2 cm. Uno de los motivos que justifica este hecho es el grosor
de la marca preseñalizada empleada. En cualquier caso, estos residuos son coherentes
con las precisiones alcanzadas con ambos métodos empleados de forma individual y
con la resolución final de los MDS sometidos a procesos de filtrado y depuración.
85

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.4. ANÁLISIS MULTITEMPORAL DE LAS DISTINTASCAMPAÑAS
En el presente trabajo, el análisis multitemporal consiste en detectar los fenómenos
de inestabilidad de ladera a los que un terreno pueda estar sometido en un periodo de
tiempo. Pero además es necesario identificar y cuantificar tales movimientos, lo cual
estará en función de la precisión y fiabilidad de los métodos aplicados. Para hacer
posible el análisis, se dispone de datos que representan el objeto, tomados en diferentes
fechas.
Para el análisis multitemporal de las distintas campañas se realiza un análisis
exhaustivo de los MDSs obtenidos. Para realizar el estudio se comparan los MDS
obtenidos de las distintas épocas en las que se han tomado los datos. El estudio se
dividirá en dos partes, por un lado se determina si ha habido deformación debido al
movimiento de la ladera y por otro se cuantifica dicha deformación. Para ello, el
software Maptek I-site dispone de herramientas específicas en el tratamiento de
modelos de superficie.
3.4.1. Análisis de la deformación comparando Modelos superficiales
Para identificar los movimientos de ladera se disponen de modelos digitales de
superficie, generados a partir de datos tomados en diferentes fechas. Se dispone por lo
tanto de cuatro modelos con los que trabajar, comparando por un lado los MDS
obtenidos por técnicas TLS y por otro los MDS obtenidos por técnicas fotogramétricas.
Para llevar a cabo el proceso, el software MaptekI-site dispone de una herramienta
que permite calcular la distancia normal entre superficies y cuantificar este cálculo
mediante una escala de colores que diferencia los movimientos ocurridos que se
traducen en acumulaciones y pérdidas de material.
En este proyecto, existen dos campañas. Los datos de la primera de ellas han sido
facilitados por el grupo de investigación TEP-213 de la Universidad de Jaén y se
corresponde a dos campañas de campo de TLS a fecha 21/01/2014 y otra de UAV a
fecha 07/03/2014. La segunda campaña, realizada para el desarrollo de este proyecto y
ya tratada en apartados previos, tiene lugar el 29/04/2014. Con la información facilitada,
se generan nuevos modelos superficiales y se comparan los resultados obtenidos con los
obtenidos en nuestra campaña.
86

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.4.1.1. Comparación de MDSs obtenidos por técnicas TLS
A continuación se presentan los resultados obtenidos mediante el análisis de los
modelos. Se ha calculado un modelo diferencial resultante a partir de los modelos que
representan el objeto de estudio en las distintas épocas.
Se toma como superficie de referencia la generada a partir de datos de la primera
campaña.
Figura 39. Modelo diferencial TLS20140429-TLS20141021
Figura 40. Histograma de la deferencia de MDS TLS
A nivel visual se puede comprobar que realmente hubo deformación de la ladera en
el periodo transcurrido. Hay zona de la superficie tomada posteriormente que se
encuentran por debajo de la superficie base (valores negativos color naranja), y zonas
que están por encima de la superficie base (valores positivos color azul), lo cual es
87

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
lógico, ya que como se puede observar hubo un desplazamiento de materiales de las
zonas más altas del talud y se han ido depositando en la zonas más bajas.
En color gris representan las zonas coincidentes de ambas superficies, y las zonas
representadas en azul oscuro o verde son zonas fuera del rango establecido en el cálculo
de la distancia y ello es debido a que no aparecen en ambas representaciones.
El histograma de la Figura40 representa la distancia que hay entre los distintos
modelos, definidos con un rango de 25 cm. El pico de la curva se encuentra en el cero,
la orientación de ambas campañas TLS es correcta, el modelo presenta un error medio
cuadrático entorno a0 cm, por lo que se puede considerar que no hay problemas de
orientación en los datos respecto al sistema de referencia marcado. Las diferencias
observadas, están entorno a pocos cm (0-5), que pueden estar justificadas por la
variación de la superficie entre campañas y por los errores propios atribuibles al
sistema.
3.4.1.2. Comparación de MDSs obtenidos por técnica fotogramétrica
A continuación se representa el modelo diferencial resultante a partir de los
modelos generados mediante técnica fotogramétrica que representan el objeto de
estudio en distintas épocas.
Figura 41. Modelo diferencial UAV20140429_UAV201402
88
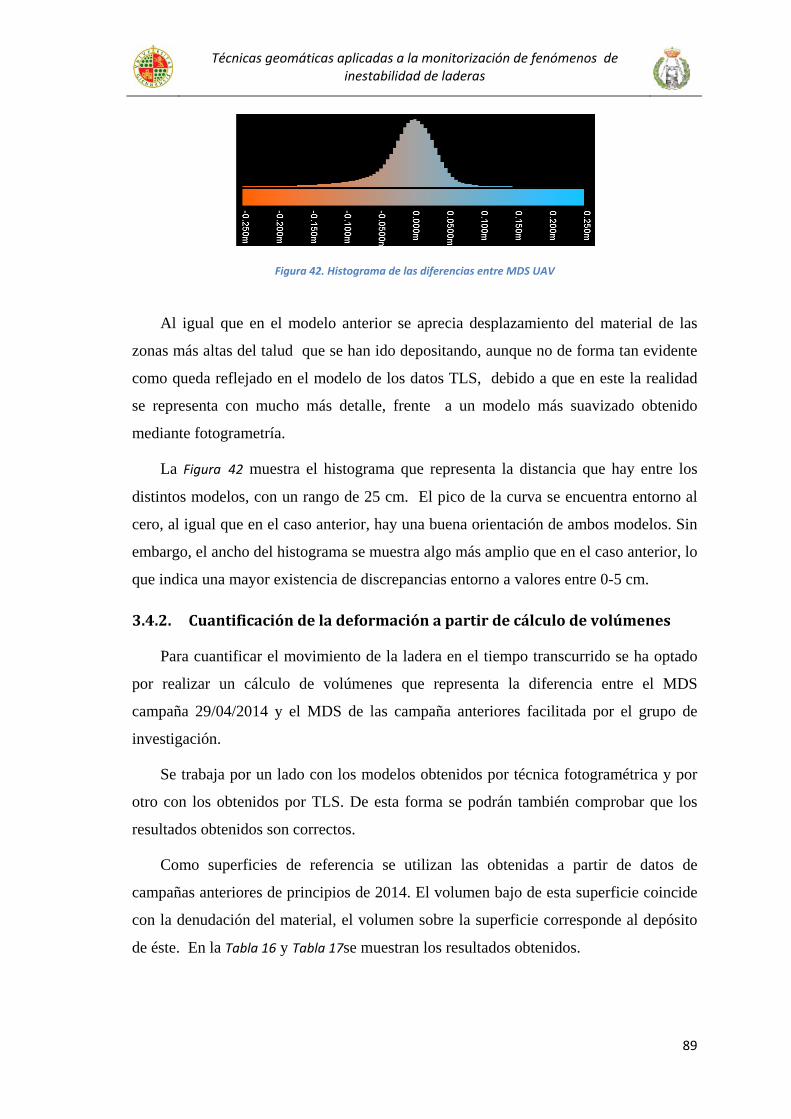
Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 42. Histograma de las diferencias entre MDS UAV
Al igual que en el modelo anterior se aprecia desplazamiento del material de las
zonas más altas del talud que se han ido depositando, aunque no de forma tan evidente
como queda reflejado en el modelo de los datos TLS, debido a que en este la realidad
se representa con mucho más detalle, frente a un modelo más suavizado obtenido
mediante fotogrametría.
La Figura 42 muestra el histograma que representa la distancia que hay entre los
distintos modelos, con un rango de 25 cm. El pico de la curva se encuentra entorno al
cero, al igual que en el caso anterior, hay una buena orientación de ambos modelos. Sin
embargo, el ancho del histograma se muestra algo más amplio que en el caso anterior, lo
que indica una mayor existencia de discrepancias entorno a valores entre 0-5 cm.
3.4.2. Cuantificación de la deformación a partir de cálculo de volúmenes
Para cuantificar el movimiento de la ladera en el tiempo transcurrido se ha optado
por realizar un cálculo de volúmenes que representa la diferencia entre el MDS
campaña 29/04/2014 y el MDS de las campaña anteriores facilitada por el grupo de
investigación.
Se trabaja por un lado con los modelos obtenidos por técnica fotogramétrica y por
otro con los obtenidos por TLS. De esta forma se podrán también comprobar que los
resultados obtenidos son correctos.
Como superficies de referencia se utilizan las obtenidas a partir de datos de
campañas anteriores de principios de 2014. El volumen bajo de esta superficie coincide
con la denudación del material, el volumen sobre la superficie corresponde al depósito
de éste. En la Tabla 16 y Tabla 17se muestran los resultados obtenidos.
89

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Superficie nueva TLS_20140429 Superficie original TLS_20140121 Volumen bajo la superficie original (corte) 538.610m3
Volumen sobre la superficie original (relleno) 478.182m3
diferencias de volúmenes -60.428m3 Tabla 16. Diferencias volumétricas entre superficies TLS
Superficie nueva UAV_20140429 Superficie original UAV_201402.. Volumen bajo la superficie original (corte) 206.968m3
Volumen sobre la superficie original (relleno) 156.857m3
diferencias de volúmenes -50.112m3 Tabla 17. Diferencias volumétricas entre superficies UAV
Con el cálculo de volúmenes se pretende cuantificar los movimientos de la ladera,
los resultados obtenidos son coherentes, ya que el volumen depositado es menor, es
lógico que en el periodo transcurrido hubiera pérdida del material.
Los cálculos dependen también de la técnica empleada en la obtención de las
superficies, como se verá en el siguiente apartado, la técnica TLS ofrece mucho más
detalle frente a técnica fotogramétrica que suaviza bastante el modelo. Sin embargo,
aunque los resultados finales son parecidos (varían en unos 10 m3), la variación puede
ser debida a la técnica y/o a que las primeras campañas de referencia TLS y UAV no se
tomaron el mismo día, si no con diferencia de más de un mes, tiempo en el cual la
ladera pudo haber presentado algún tipo de movimiento. En todo caso la tendencia es la
misma, hay pérdida de material (en la misma magnitud) con el paso del tiempo.
90

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
3.5. ANÁLISIS MULTIFUENTE
En este apartado se pretende hacer un análisis de viabilidad de las técnicas
empleadas, analizando las posibilidades que ofrecen desde la captura de datos hasta la
obtención de los productos finales.
3.5.1. Captura
En ambos casos la captura de los datos es un proceso rápido, se capturan grandes
cantidades de datos en un periodo relativamente corto, y con gran resolución.
Algunas ventajas del UAV frente a TLS son claras en cuanto al modo de captura.
El UAV se desplaza sobre la zona de forma automática según una planificación y puede
acceder desde zonas sobre elevadas a diferencia del TLS que necesita estacionamiento
terrestre para la captura de datos. Estas limitaciones pueden solventarse si el UAV
pudiera incorporar un escáner laser y hacer un barrido de la zona desde el aire, si bien
en este caso se requeriría un UAV de mayor peso (y coste), o bien un LiDAR de tamaño
y peso ligeros, cuyas precisiones en la actualidad están comprometidas.
El punto de vista de toma de los datos es diferente según la técnica. El punto de
vista del UAV puede modificarse según las necesidades de trabajo mientras que el
escáner está más limitado por el punto de estacionamiento. En este caso práctico existe
zonas de oclusión importantes en la técnica TLS que sin embargo quedan capturadas
con la técnica fotogramétrica.
Los datos capturados mediante TLS presentan ventaja a la hora de representar la
realidad ya que estos se toman de forma directa sobre el objeto, resultando en modelos
muy densos y de gran detalle. Sin embargo, los datos primarios fotogramétricos son las
imágenes con una valiosa información semántica a partir de las cuales se generan los
otros productos. Por tanto, se trata de un método de observación indirecto. En cualquier
caso, en caso de ser posible, la combinación de ambas técnicas puede ser la solución
ideal.
3.5.2. Orientación
El proceso de orientación de las técnicas se elabora de forma diferente aunque se
llega al mismo resultado que consiste en una nube de puntos referida a un mismo
sistema de referencia global.
91

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
En fotogrametría la nube de puntos final son datos calculados a partir de unos datos
iníciales que son las imágenes, es necesario conocer la geometría del haz, orientar las
imágenes en un sistema de referencia local a partir de los puntos de paso generados
mediante correlación automática y las coordenadas tridimensionales en el sistema de
referencia global mediante el empleo de una transformación 3D conforme.
En la técnica TLS los datos medidos son directamente la nube de puntos, referidos
a un sistema local propio del instrumento con el que se realiza la toma. Para pasar del
sistema local al global se calcula una transformación 3D rígida.
En ambos casos se necesitan puntos comunes en ambos sistemas para realizar las
transformaciones respectivas, siendo éstos los puntos de control medidos en campo
mediante técnicas GNSS.
Para finalizar el análisis, se compara la orientación de los datos TLS frente a datos
calculados mediante el UAV. A pesar de que los valores estadísticos muestran mejores
resultados para los datos de orientación fotogramétrica, la orientación con técnicas TLS
es más robusta ya que no interviene en el cálculo del factor de escala, pues se trata,
como bien se mencionó antes, de una observación directa y para efectuar la orientación
absoluta se emplea una transformación 3D rígida.
Se observa errores de orientación de los datos fotogramétricos en los bordes del
modelo, coincidiendo con la zona en las que no existen puntos de control y por tanto se
produce extrapolación de los datos. En la zona central se consigue una buena
orientación, los modelos elaborados por ambas técnicas quedan mejor ajustados.
En la Figura 43 se pueden apreciar de forma visual dichas anomalías, el modelo
generado mediante fotogrametría presenta diferencias en los bordes con respecto al
modelo generado mediante técnica TLS.
92

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 43. Zonas que presentan error en orientación
Los errores de orientación que los datos TLS podrían presentar se deben a que se
han empleado para la orientación absoluta del bloque las bases de estacionamiento ya
que su distribución lo permite al no tratarse de estaciones alineadas. El bloque se
ajustaría más a esta zona, extrapolando la orientación para los puntos altos de la ladera o
empleando algunos puntos de control en esas áreas.
Este método es de gran aplicación cuando el acceso para distribuir las dianas y
medirlas con equipos GPS es difícil.
En todo caso los resultados de la orientación son idóneos en ambas técnicas, como
se puede observar en el apartado de análisis de los resultados obtenidos en orientación.
3.5.3. Nube de Puntos
La nube de puntos generada mediante TLS son datos medidos directamente por lo
tanto la realidad queda mejor representada. Esta nube es mucho más densa y de mayor
resolución, el nivel de detalle es mucho más elevado debido a la profundidad con la que
es capaz de capturar los datos el escáner láser pero estas ventajas derivan también en la
presencia de ruido.
93

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 44. Nube de puntos obtenida con técnicas TLS
Como ya se ha comentado, la nube de puntos generada con técnicas fotogramétricas
se obtiene mediante procesos realizados sobre las imágenes capturadas, es decir, de
manera indirecta. Asimismo, la densidad de dicha nube depende de factores tales como
la calidad de las imágenes, la perspectiva de las mismas, la similitud radiométrica, etc.
Por tanto, todos estos factores implican que la nube de puntos sea mucho más suave que
la obtenida mediante TLS.
El software AgiSoftPhotoScan presenta distintos niveles de resolución. Existen
cinco niveles, desde bajos hasta muy altos. A medida que se aumenta en resolución, se
gana en definición de detalle, textura y rugosidad al mismo tiempo que aumenta el coste
computacional. Concretamente, la nube de puntos generada para el presente proyecto ha
sido con una densidad media.
94

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 45. Nube de puntos obtenida mediante técnicas fotogramétricas
3.5.4. Modelos Superficiales
Los modelos del terreno se obtienen a partir de la nube de puntos por lo tanto
presentan las mismas características que las nubes.
Los MDS obtenidos mediante técnicas TLS presentan un nivel de rugosidad más
elevado, frente a los modelos suavizados obtenidos por las técnicas fotogramétricas.
Además, el nivel de detalle de los objetos que se encuentran ligados al talud también es
mayor empleando TLS. Los elementos que encontramos son básicamente vegetación,
además de una valla de contención para el material desplazado. En los modelos
fotogramétricos hay detalles que no se aprecian como sería la valla y gran parte de la
vegetación queda confundida con la superficie del terreno.
Se pueden observar zonas de ocultación en los modelos generados mediante TLS,
debido al punto de vista desde el que se toman los datos, es decir, desde estaciones en
tierra donde el eje de observación no es perpendicular a la totalidad del objeto de
estudio. En cambio los datos fotogramétricos pueden ser capturados mediante un eje de
observación perpendicular al plano que define la zona de interés. En este caso práctico,
se lleva a cabo mediante la realización de tomas inclinadas. Además, también se han
llevado a cabo pasadas cenitales. Mediante la combinación de ambos se asegura el
95

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
registro completo del objeto evitando zonas de oclusiones. Por tanto, queda manifiesto
que la captura de los datos queda reflejada en el producto final.
Figura 46. Comparativa MDS procedentes de TLS y UAV
Figura 47. Histograma comparativo TLS y UAV
Además, tal y como se observa en laFigura 47 la diferencia existente entre ambas
metodologías están en consonancia con las precisiones de orientación de los bloques. El
dato de referencia es el modelo UAV mientras que el calculado es el modelo TLS, el
histograma no es simétrico por lo que se observa un desplazamiento positivo de los
datos TLS y se concluye que el modelo TLS se encuentra ligeramente por encima de los
datos UAV. Esto es debido a que los modelos obtenidos por fotogrametría son mucho
más suaves, la técnica TLS tiene más penetrabilidad sobre el objeto, los modelos
obtenidos son más rugosos, como se puede observar en la Figura 48.
96

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Figura 48. Rugosidad de los MDS obtenidos por TLS vs UAV
3.5.5. Análisis de viabilidad
Las técnicas empleadas tienen un gran potencial para este tipo de estudios de
análisis multitemporales. Los resultados obtenidos mediante una u otra técnica son
similares y permiten monitorizar el proceso evolutivo que presenta la ladera de estudio.
A partir de la escala de trabajo fijada, se ha podido detectar cambios en el estado
del objeto de estudio que además han sido cuantificados y representados.
En cuanto a la captura de datos el UAV presenta ventajas a la hora de acceder a
zonas más complicadas, para solventar está desventaja del TLS frente a UAV, lo ideal
sería la incorporación de escáner láser a plataforma aéreas
Por otro lado, considerando las ventajas en la captura de los datos, las precisiones
ofrecidas, precio del instrumental, rendimiento en el flujo de trabajo en gabinete, coste
del software, se optaría por trabajar con UAV para este tipo de estudios. No por ello
está técnica es mejor que la técnica TLS.
97

4. CONCLUSIONES

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
En este trabajo se ha llevado a cabo tanto el proceso metodológico como una
aplicación práctica del mismo empleando las técnicas TLS y UAV.
A continuación se presentan las conclusiones finales atendiendo a la tecnología y
resultados obtenidos a lo largo de este proceso.
4.1. CONCLUSIONES DE LAS TÉCNICAS EMPLEADAS
Se ha realizado un análisis de viabilidad de las técnicas geomáticas en auge,
fotogrametría con UAV y TLS, para la monitorización de laderas y se ha comprobado
que son óptimas para este tipo de trabajo. Dichas técnicas presentan potenciales
similares, pero del mismo modo presentan ventajas e inconvenientes una respecto a la
otra.
Con este trabajo se han llevado a cabo de forma paralela todas las fases del proceso
para ambas técnicas, desde la definición del marco de referencia, pasando por la
planificación de la captura de la información, la edición de los datos (orientación y
registro, obtención de la nube de puntos y clasificación de los datos), hasta la obtención
de productos.
Resulta imprescindible la correcta definición del marco de referencia para
garantizar la coherencia espacial de los datos. De este modo, cualquier cambio puede
ser atribuido al fenómeno de estudio y no a la falta de coincidencia o de coherencia de
los datos.
La captura de los datos se ha llevado a cabo conforme a lo establecido en la fase
previa de planificación. La información capturada es válida para los objetivos
propuestos y por tanto para la consecución de las siguientes fases.
Las técnicas empleadas presentan diferencias en cuanto a la captura de datos. La
información capturada mediante UAV son imágenes mientras que con técnicas TLS son
las coordenadas tridimensionales del objeto de estudio. Por otro lado, el uso de
dispositivos UAV permite acceder a la zona, independientemente de las características
de las mismas (inaccesibilidad, orografía acusada, etc.), mientras que la captura con
técnicas TLS se ve limitada al estacionamiento del instrumento. Esta limitación
quedaría solventada si fuera posible incorporar un instrumento TLS en la aeronave.
99

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Para la orientación de datos mediante técnica UAV es imprescindible la ubicación
de puntos de control dentro la zona de estudio. Sin embargo, el TLS no es necesario
disponer de puntos de control sobre la zona estudiada dado que se pueden utilizar los
centros de escaneo como puntos de control.
En cuanto a la obtención de la nube de puntos, las capturadas con TLS representan
mejor la realidad que las obtenidas a partir de técnicas fotogramétricas debido a que la
primera es una observación directa del objeto frente al método indirecto de la segunda.
Sin embargo, esta ventaja presenta el inconveniente de generar nubes de puntos muy
densas con ruido, necesitando la posterior depuración en sistemas informáticos de alta
capacidad.
Las superficies se generan a partir de las nubes de puntos, por tanto heredan las
mismas características. Las superficies obtenidas con UAV suavizan más la realidad
mientras que las superficies obtenidas con TLS definen la realidad con mayor
rugosidad, textura, detalle a la vez que ruido. El método de triangulación cobra gran
importancia ya que la elección de uno u otro determinará la correcta adaptación de la
superficie a la realidad. Se ha optado por una triangulación topográfica adaptándose el
plano del talud a un plano XY.
Analizando ambos métodos se pueden observar claras diferencias, no por ello una
de las técnicas es menos válida que la otra para este tipo de trabajo, sería válido fusionar
datos provenientes de ambas técnicas, ya que pueden completarse mutuamente, por un
lado la gran potencia en la adquisición de datos espaciales por parte del TLS y, por otro
lado, la importante información semántica inherente a la imagen.
100

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
4.2. CONCLUSIONES DE LOS RESULTADOS
Los resultados de las orientaciones han sido satisfactorios en todos los casos,
estando los resultados estadísticos dentro de los requisitos exigidos por el GSD de vuelo
y densidad de los datos de TLS, y la calidad posicional de los puntos de control
utilizados.
Las superficies obtenidas con ambas técnicas son válidas para llevar a cabo el
estudio multitemporal, permitiendo la identificación y cuantificación del movimiento de
la ladera.
En el análisis multitemporal, se han obtenido resultados muy similares para ambas
técnicas, atribuyendo las pequeñas diferencias a las particularidades de las superficies
obtenidas mediante las diferentes técnicas. Se permite distinguir el desplazamiento de
material, cuantificando pérdidas y deposiciones.
101


ANEXOS

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
Hoja de cálculo de la Planificación del vuelo (Proyecto_Vuelo.xlsx) se plantea
las diversas posibilidades de ejecución vuelo para la zona, determinando los
parámetros de vuelo según unos datos de partida establecidos (GSD, solape,
etc).
Tratamiento y precisiones de los datos medidos en campo (Punto_Control.xlsx)
contiene coordenadas ajustadas tras la medición, corrección del factor de escala
propio de la proyección UTM, chequeo de los puntos de control tras realizar la
orientación.
Resultados de la orientación fotogramétrica con Photoscan (informe_pscan.pdf).
104

BIBLIOGRAFÍA

Técnicas geomáticas aplicadas a la monitorización de fenómenos de inestabilidad de laderas
A continuación se indica la bibliografía empleada en la elaboración del presente
proyecto:
• Apunte Fotogrametría III. Universidad de Jaén
• Pérez Álvarez, J.A. Apuntes de Fotogrametría III. Universidad de Extremadura,
2001.
• Manual operador Astec Falcon 8.
• Manual usuario Agisoft PhotoScan
• Lerma García, J.L.; Biosca Tarongers, J. M. Teoría y práctica del Escaneado Láser
Terrestre.
• Ilris-3D Operation Manual, Manual Usuario Leica ScanStatión C10.
• Teritorios a examen II, Universidad de Santiago de Compostela.
• Tutoriales Internet.
106
Recommended

















