JPOJ1.I TEONI OA NAOI
FACULTAD 015 INGKNXKRXA KEJÍOTTRIGA
" DISEKO Y CONSTRUCCIÓN DE UN MODULO DIDÁCTICO PARA EL
ESTUDIO DEL TROCEADOR CLASE A EN DOS CUADRANTES CON
CONTROL SIMULTANEO Y NO SIMULTANEO "
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO EN
ELECTRÓNICA Y CONTROL
VÍCTOR HUGO QUINTERO BENITEZ
Diciembre de 1.994
A MIS PADRES Y HERMANOS
Quienes con su gran abnegación y
sacrificio han sido fundamentales
para la culminanción de la
presente tesis.
AGRADECIMIENTO
Quiero dejar constancia de mi más
sincero agradecimiento al Dr.
Hugo Banda G., Director, por su
valioso apoyo y dirección en los
momentos más oportunos.
Certifico que este trabajo
ha sido realizado en su
totalidad por el señor
Víctor ÍJtwg6"""QÍITfttkero Benitez
Dr. Hugo Banda G.
DIRECTOR
ÍNDICE
Pag,
INTRODUCCIÓN 1
CAPITULO I: ASPECTOS GENERALES 4
1.1 ANÁLISIS DE LA MAQUINA DE DC CON EXCITACIÓN
INDEPENDIENTE 4
1.1.1 CIRCUITO EQUIVQLENTE Y ECUACIONES 5
1.1.2 MODELO NORMALIZADO DE LA MAQUINA DE DC
CON EXCITACIÓN INDEPENDIENTE 10
1.1.3 CARACTERÍSTICAS EN ESTADO ESTABLE 14
1.1.4 COMPORTAMIENTO DINÁMICO 18
1.1.5 MÉTODOS DE FRENADO 20
1.1.5.1 FRENADO POR INVERSIÓN 21
1.1.5.2 FRENADO DINÁMICO 22
1.1.5.3 FRENADO REGENERATIVO 23
1.1.5.4 FRENADO MECÁNICO 24
1-1.6 CUADRANTES DE OPERACIÓN DE LA MAQUINA 25
1.2 ANÁLISIS DEL TROCEADOR REDUCTOR Y ELEVADOR -
INVERTIDO. 27
1.2.1 TROCEADOR REDUCTOR 28
1.2.1 TROCEADOR REDUCTOR CON CARGA R-L-V. ,. 30
1.2.2 TROCEADOR ELEVADOR - INVERTIDO 35
1.3 ANÁLISIS DEL TROCEADOR DE DOS CUADRANTES 38
1.3.1 ANALI33.S DEL TROCEADOR CON CONTROL
NO SIMULTANEO 40
1.3.2 ANÁLISIS DEL TROCEADOR CON CONTROL
SIMULTANEO 45
1.3.3 COMPARACIÓN ENTRE LOS DOS TIPOS DE
CONTROLES 49
CAPITULO II: DISEHO DEL TROCEADOR PARA EL CONTROL DE
LA MAQUINA EN DOS CUADRANTES 52
2.1 REQUERIMIENTOS PARA EL DISERO 52
2.1.1 ESPECIFICACIONES DE LA CARGA
(MAQUINA DC) 53
2.1.2 ESPECIFICACIONES DEL CONVERTIDOR 53
2.2 ASPECTOS TÉCNICOS 55
2.2.1 INTERPRETACIÓN DEL SIGNIFICADO DE LA
POTENCIA EN CADA CUADRANTE 57
2.3 MODELO Y FUNCIÓN DE TRANSFERENCIA DEL SISTEMA
EN DOS CUADRANTES 58
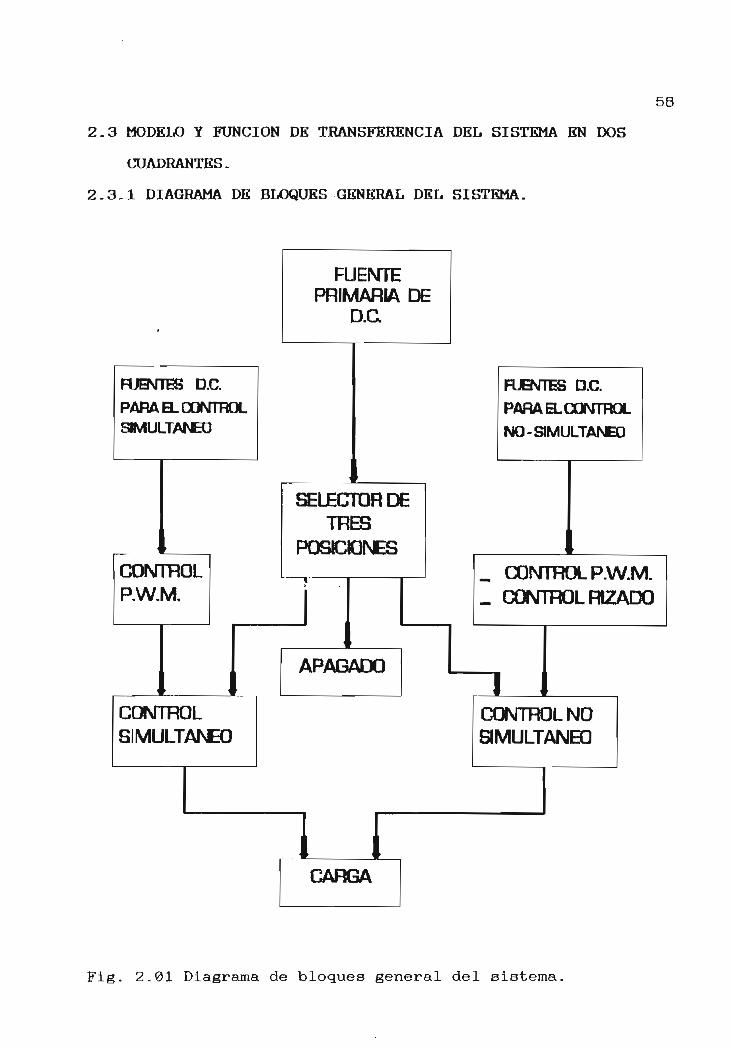
2.3.1 DIAGRAMA DE BLOQUES GENERAL DEL SISTEMA.. 58
2.3.2 MODELO DE LA MAQUINA DC CON EXCITACIÓN
INDEPENDIENTE 59
2.3.3 MODELO DEL TROCEADOR DC - DC 60
2.3.4 MODELO DEL CONTROL DE LOS INTERRUPTORES.. 60
2.3.5 MODELO GENERAL DEL SISTEMA 61
2.4 DISEÑO DEL SISTEMA 64
2.4.1 DISEÑO DEL CIRCUITO DE POTENCIA 64
2.4.2 DISEBO DE LOS MANEJADORES DE BASE PARA
LOS TRANSISTORES DE POTENCIA 73
2.4.3 DISEÑO DE LAS REDES SNUBBER 77
2.4.3 1 SNUBBER DE APAGADO 78
2.4.3.2 SNUBBER DE ENCENDIDO 82
2.4.3.3 SNUBBER DE SOBREVOLTAJE 86
2.4.3.4 SNUBBERS PARA CONFIGURACIONES
PUENTE 87
2.4.4 DISEÑO DEL CIRCUITO DE CONTROL 89
2.4.4.1 DISEÑO DEL CIRCUITO DE CONTROL
SIMULTANEO 89
2.4.4.2 DISEÑO DEL CIRCUITO DE CONTROL
NO SIMULTANEO 95
2.4.5 DISEÑO DE LAS PROTECCIONES 100
2.4.5.1 PROTECCIÓN CONTRA SOBRECORRIENTE.. 101
2.4.5.2 PROTECCIÓN CONTRA SOBREVOLTAJE 104
2.4.5.3 PROTECCIÓN CONTRA POLARIDAD
INVERTIDA 104
2.4.5.4 PROTECCIÓN CONTRA PERDIDA DE
EXCITACIÓN 105
CAPITULO III: MONTAJE Y PRUEBAS DEL EQUIPO MODULAR 106
3.1 COMPROBACIÓN DE LAS FORMAS DE ONDA EN CADA
TIPO DE CONTROL 109
3.1.1 TROCEADOR CON CONTROL SIMULTANEO
EN EL PRIMER CUADRANTE 109
3.1.2 TROCEADOR CON CONTROL SIMULTANEO
EN EL SEGUNDO CUADRANTE 112
3.1.3 TROCEADOR CON CONTROL NO SIMULTANEO
EN EL PRIMER CUADRANTE 115
3.1.4 TROCEADOR CON CONTROL NO SIMULTANEO
EN EL SEGUNDO CUADRANTE 119
3 . 2 EFECTOS QUE SE PRODUCEN 121
3.2.1 EFECTO DE LA VARIACIÓN DE LA
INDUCTANCIA DE FILTRADO 121
3.2.2 EFECTO DE LA CONMUTACIÓN ENTRE LOS
CUADRANTES I Y II EN LOS DOS TIPOS DE
CONTROL 125
3.2.3 PERDIDA DE EXCITACIÓN EN LA MAQUINA DC... 126
3.3 EFICIENCIA DEL TROCEADOR 127
3.4 COMPROBACIÓN DE LA LINEALIDAD DEL SISTEMA 140
CAPITULO IV: RESULTADOS Y CONCLUSIONES 143
4.1 CONCLUSIONES SOBRE LOS CIRCUITOS
EXPERIMENTALES 143
4.2 ANÁLISIS TÉCNICO - ECONÓMICO 147
4.3 RECOMENDACIONES 152
REFERENCIAS BIBLIOGRÁFICAS 156
ANEXOS:
ANEXO 1: MANUAL DE USO DEL EQUIPO
ANEXO 2: DIAGRAMAS CIRCUITALES
ANEXO 3: CIRCUITOS IMPRESOS
ANEXO 4: ESPECIFICACIONES UTILIZADAS
ON
Existen muchas aplicaciones en electrónica donde está
disponible sólo una fuente de alimentación primaria de DC
fija para el manejo de una carga. Guarido dicha carga, para
su manejo, requiere de tensión y corriente variables;
entonces surge la necesidad de los convertidores DC - DC o
troceadores. Estos convertidores se caracterizan por
realizar un proceso, mediante el cual se transforma energía
de un nivel de tensión continua fija en tensión continua
variable.
De manera particular, el convertidor DC - DC o troceador
que es tema de estudio del presente trabajo, involucra como
técnica de operación el control simultáneo y no simultáneo.
Los interruptores que van a producir la conmutación hay que
seleccionarlos teniendo en cuenta principalmente la corriente
de carga, la frecuencia de operación, y la potencia a
manejarse. Entre los semiconductores de potencia utilizables
como interruptores en este tipo de convertidores constan los
tiristores rápidos, el GTO, loe transistores bipolares tipo
darlington, los transistores tipo FET de potencia, y el
transistor bipolar do compuerta aislada (IGBT).
La principal aplicación de los troceadores de DC es en
el transporte, donde tradieionalmente la impulsión se ha
realizado con máquinas de DC. En el momento actual se tiende
a sustituir las máquinas de DC por máquinas de inducción,
controladas por convertidores DC - AC.
En aplicaciones de alta tensión, lo más fácil y barato
es usar tirietores rápidos. La tendencia actual consiste en
usar el GTO, pero esto implica un precio del equipo muy
superior ya que el ahorro en circuitos de conmutación no
compensa el precio del semiconductor, pero se obtiene un
equipo más ligero. En baja tensión se considera que hasta
10KW es más barato utilizar transistores darlington y a
partir de 10KW tiristores rápidos o GTO. Los transistores
bipolares y los FET quedan como elementos de interfase entre
la parte de control y la parte de potencia.
El hecho de seleccionar como semiconductores de potencia
a los tiristores hace necesaria una red de apagado extra, con
la desventaja que se limita la poca rapidez de conmutación.
En cambio los transistores de potencia pueden ser manejados
más fácilmente y a mayor frecuencia por medio de la corriente
de base.
En el presente trabajo se presenta el análisis de la
máquina de DC con excitación independiente, el estudio del
troceador reductor y elevador - invertido, el diseño del
troceador de DC en dos cuadrantes. Por tratarse de un módulo
didáctico se han previsto dos técnicas tipicas para el
control del convertidor DC - DC: simultáneo y no simultáneo.
Las pruebas del equipo comprueban las formas de onda en cada
técnica de control asi como los efectos que se producen al
variar ciertos parámetros. Finalmente se discuten la
eficiencia del troceador, así como los resultados
experimentales, incluyendo un análisis técnico - económico
del proyecto y las recomendaciones pertinentes.

CAPITULO I: ASPECTOS GENERALES.
En este capítulo se realiza un análisis de la máquina de
DC con excitación independiente; tratando temas como el
circuito equivalente y las ecuaciones respectivas, el modelo
normalizado, las características en estado estable, el
comportamiento dinamito, los diferentes métodos de frenado
así como sus cuadrantes de operación.
1.1 ANÁLISIS DE LA MAQUINA DE DC CON EXCITACIÓN
INDEPENDIENTE
Para propósito de análisis se va a hacer las siguientes
consideraciones:
- La resistencia del circuito de armadura del motor es
asumida constante y se usa el valor medido con DC.
- La inductancia L del circuito de armadura es asumida
constante y su valor es medido a 60 Hz.
El flujo del campo es constante.
El motor de DC con excitación independiente está
caracterizado por su adaptabilidad a servicios que precisen
de una velocidad variable. Esta regulación se consigue
debilitando el flujo del campo para velocidades por sobre la
nominal y variando el voltaje de armadura para velocidades
inferiores a la nominal. Usualmente el circuito de campo de
5
un motor con excitación independiente es alimentado desde un
rectificador.
1-1.1 CIRCUITO EQUIVALENTE Y ECUACIONES
La máquina de DC con excitación independiente consiste
de un campo y de una armadura. El campo al ser excitado
produce un flujo magnético $ <iue se enlaza con la armadura.
La nomenclatura que se utilizará para el análisis es la
siguiente:
ea: fuerza contraelectromotríz inducida.
$: flujo por polo.
w: velocidad de la armadura.
Vt: voltaje a los terminales de la armadura.
ia: corriente de la armadura.
Ra: resistencia de armadura.
La: inductancia del circuito de armadura.
Vf: voltaje a los terminales del circuito de campo.
Lf: inductancia del circuito de campo.
Rf: resistencia de campo.
if: corriente del circuito de campo.
Te: torque electromagnético producido por la máquina.
kt, ka: constantes que dependen de loe aspectos constructivos
de la máquina.
J: momento de inercia referido al eje del motor.
B: coeficiente de roce viscoso.
Tw: torque de carga.
Tf: torque de fricción o de Coulomb.
R»
AL I M E N T A C ION +
DE
A R M A D U R A
Rf
AL I M E N T A C I O N
DE
CAMPO
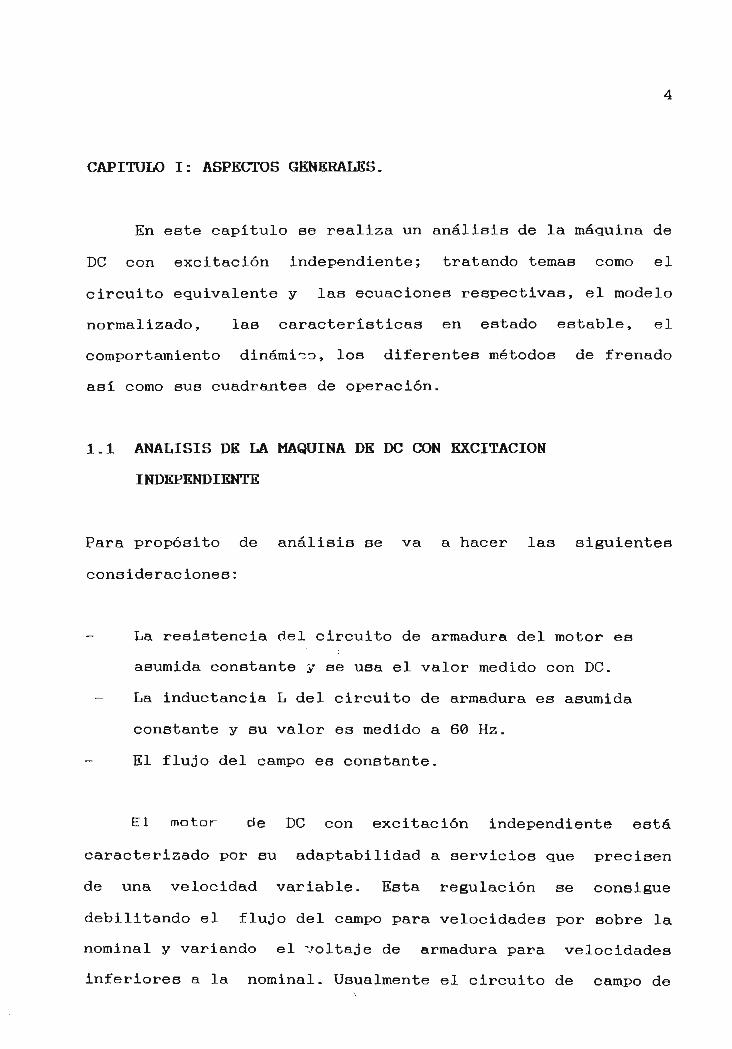
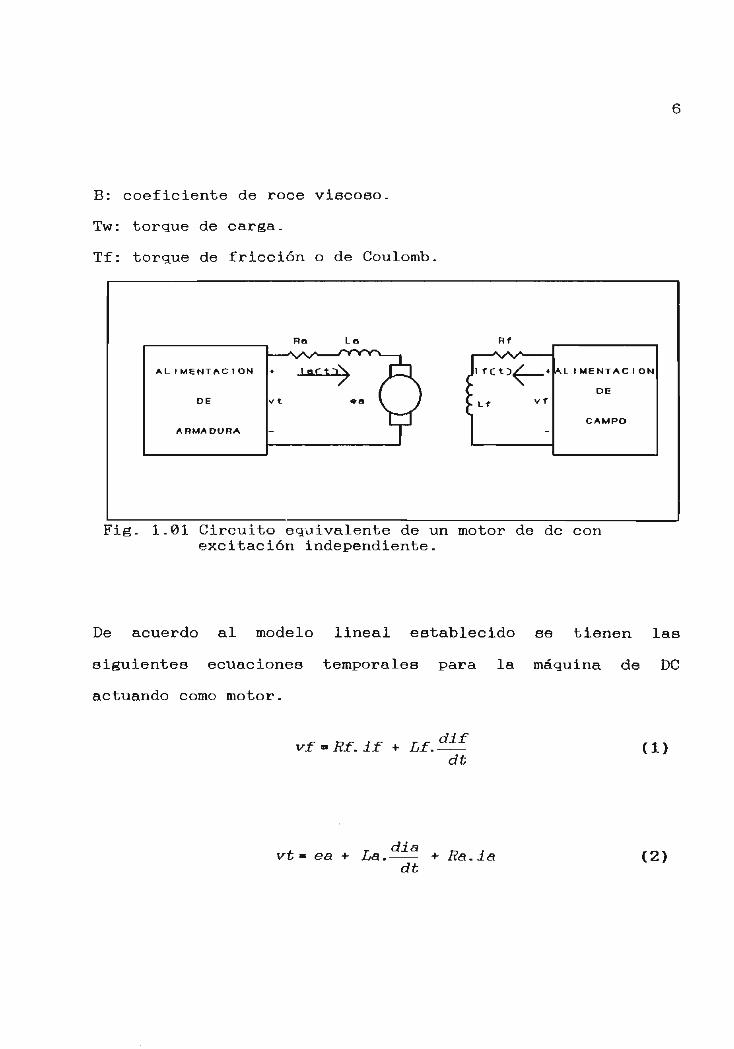
Fig. 1.01 Circuito equivalente de un motor de de conexcitación independiente.
De acuerdo al modelo lineal establecido se tienen las
siguientes ecuaciones temporales para la máquina de DC
actuando como motor.
vf **Rf. if +• Lf. difdt
(1)
T día _ea. + La. + ./te. Ja
dt(2)
Te » J.— + B. w + Tw 4- Tfdt
(3)
ea (4)
Te (5)
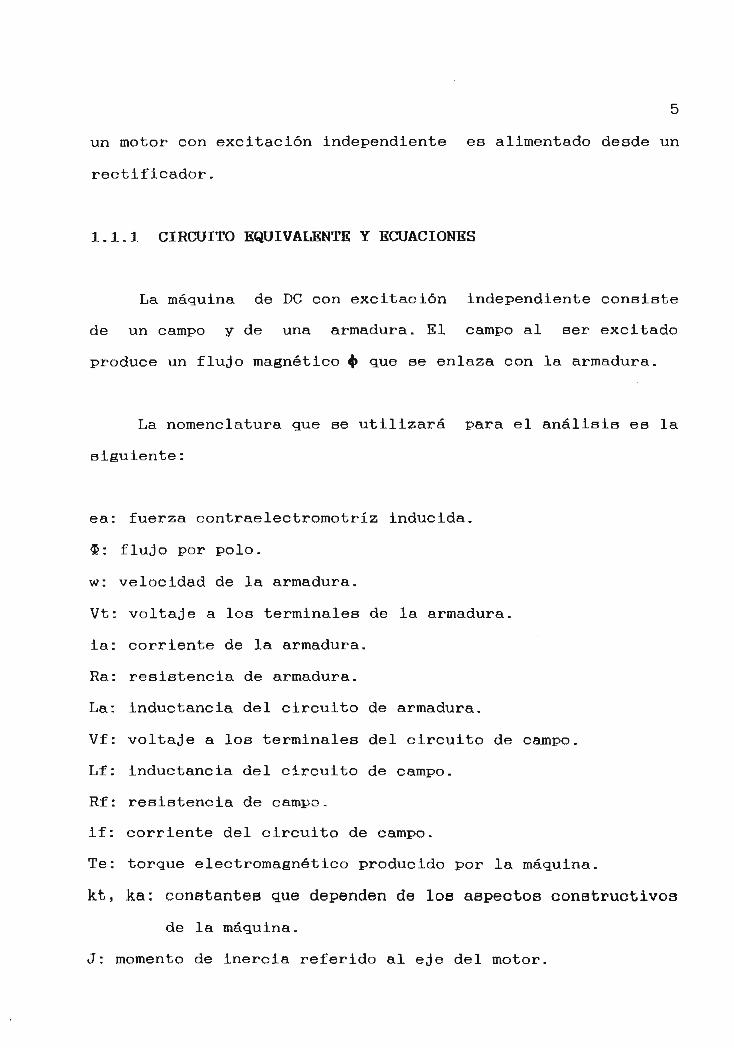
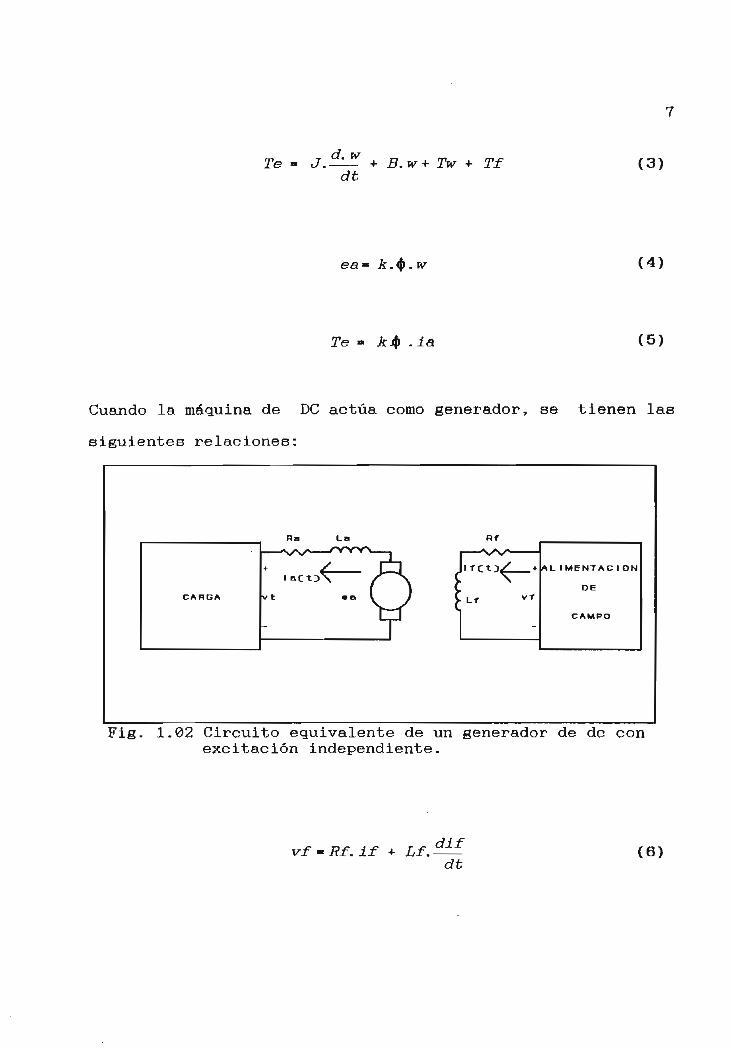
Cuando la máquina de DC actúa como generador, se tienen las
siguientes relaciones:
Ra La
vf
A L I M E N T A C I O N
DE
CAMPO
Fig. 1.02 Circuito equivalente de un generador de de conexcitación independiente.
±f difdt
(6)
a
_, CI-Z U /" "~7 \c » ea - ./?a. ia - La. (O
2V+ Tf - J.— - B.w (8)dt
ea. (9)
.la
Asumiendo que el flujo del campo es constante e igual al
flujo nominal, las ecuaciones 4, 5 y 9, 10, se transforman
en las siguientes :
Te» Jtt.ia (11)
Jrfc- k,$ N (12)
ea » ka. w
Jta- k.$ w (14)
Aplicando la transformada de Laplace a las ecuaciones
9
temporales correspondientes a la operación como motor, se
tiene:
) » ka. W(S) (15)
(16)
Te(S) » kt.
(18)
Combinando estas ecuaciones se puede llegar al modelo que
determina la función de transferencia del motor. A partir de
las ecuaciones 16 y 18 se tiene:
Ra * La.S
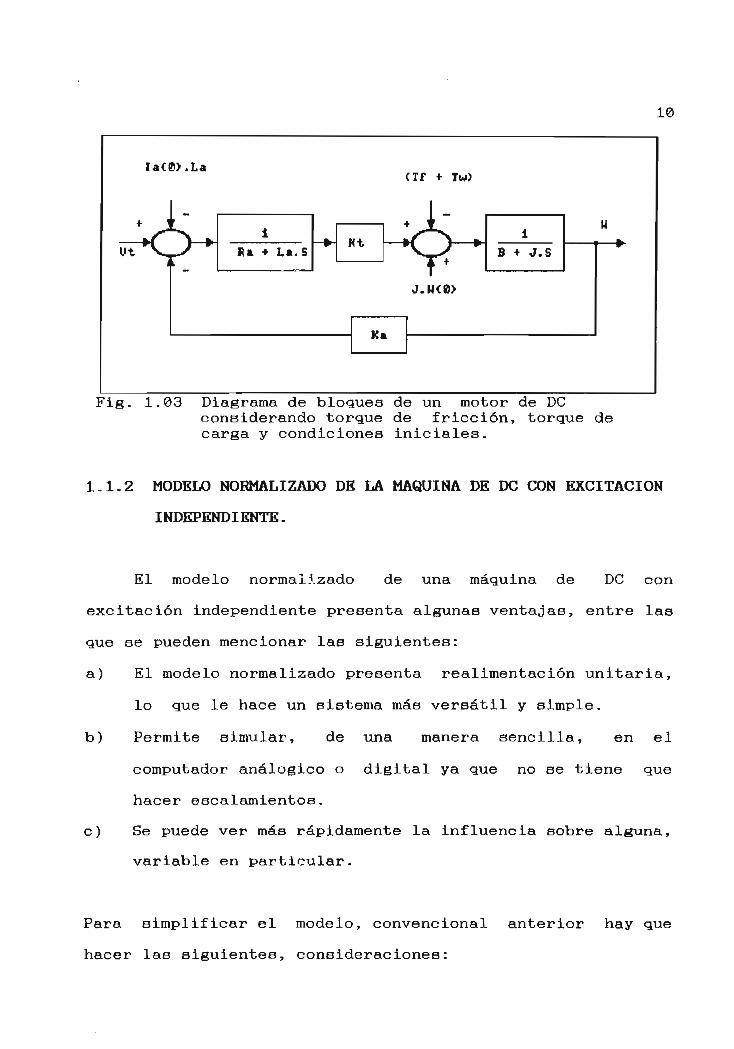
Estas ecuaciones están representadas en forma de diagrama de
bloques en la Fig. 1.03.
10
(Tf + Tw)
Ut
1Ra + L*.S
Kt
Fig. 1.03 Diagrama de bloques de un motor de DCconsiderando torque de fricción, torque decarga y condiciones iniciales.
1.1.2 MODELO NORMALIZADO DE LA MAQUINA DE DC CON EXCITACIÓN
INDEPENDIENTE.
El modelo normalizado de una máquina de DC con
excitación independiente presenta algunas ventajas, entre las
que se pueden mencionar las siguientes:
a) El modelo normalizado presenta realimentación unitaria,
lo que le hace un sistema más versátil y simple.
b) Permite simular, de una manera sencilla, en el
computador analógico o digital ya que no se tiene que
hacer escalamientos.
c) Se puede ver más rápidamente la influencia sobre alguna,
variable en particular.
Para simplificar el modelo, convencional anterior hay que
hacer las siguientes, consideraciones:
11
- Condiciones iniciales nulas, lo que quiere decir que
antes de la operación de la máquina, no existe energía
almacenada en la inductancia de armadura, y su rotor se
encuentra en repoco.
- Se desprecia el torque de fricción de Coulomb ya que en
la práctica resulta ser muy pequeño. También se
considera que la carga no tiene manera de generar un
torque propio que se oponga al torque electromagnético
del motor.
Ia(0).La - 0
J.W(0) = 0
Tf + Tw = 0
Bajo estas condiciones, las ecuaciones 15, 16, 17 y 18 quedan
reducidas a la siguiente forma:
Ea - ka.W (21)
Vt « Ea + la.(Ka + La. S) (22)
le- kt.Ia (23)
Te- W.(B + J.S) (24)
Para normalizar el modelo de la máquina, se utilizan
parámetros nominales, parámetros a rotor bloqueado y en
vacío:
12
Vtw: voltaje nominal en el terminal de armadura.
W0: velocidad de vacio a voltaje nominal.
laRB: corriente de armadura con el rotor
bloqueado,cuando aplicamos Vtw.
TCRB: torque electromagnético a rotor bloqueado.
Para la condición de vacío y con voltaje de alimentación de
armadura igual al nominal, la caida de tensión sobre Ra es
despreciable. Por lo tanto:
VtN - ka.Wq (25)
En estado estable y para rotor bloqueado:
Ra (26)
(27)
Se definen tres constantes que serán utilizadas en el modelo
re - La/Ra ; constante de tiempo eléctrica
rm = J.We/TeRB ; constante de tiempo mecánica.
Bn = B.We/TeRB ; coeficiente de roce viscoso
normalizado.
Se hacen además las siguientes definiciones:
Voltaje de armadura normalizado:
13
VtVt
n VtN(28)
Corriente de armadura normalizada:
Ja*n laRB
(29)
Velocidad angular normalizada:
*n (30)
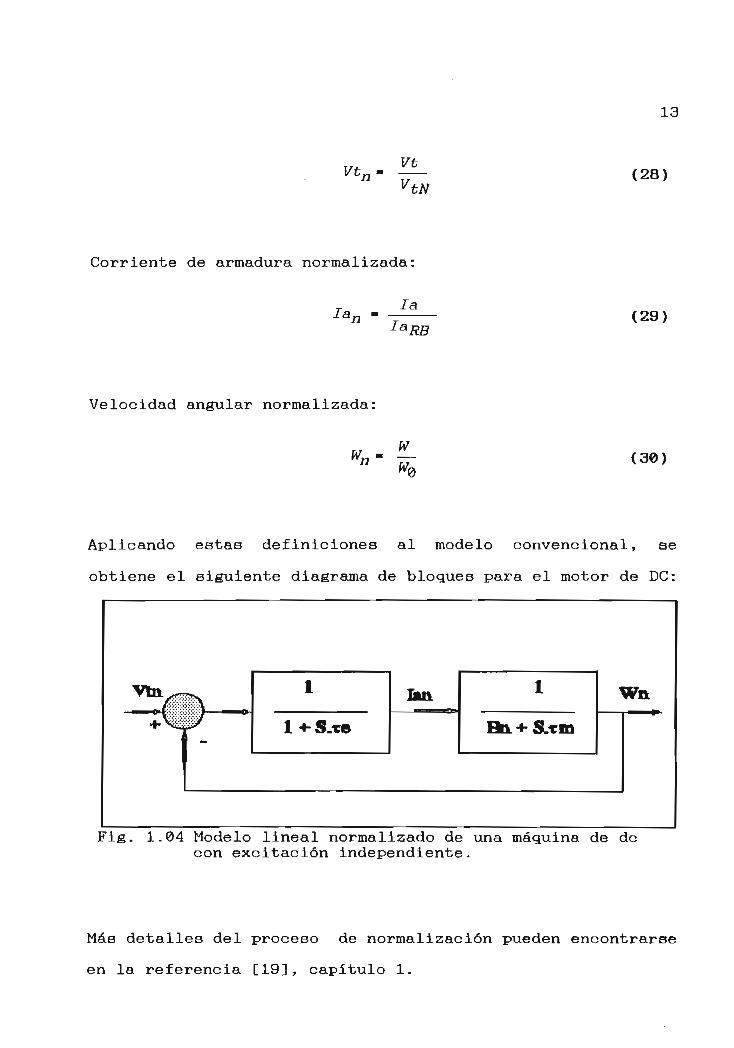
Aplicando estas definiciones al modelo convencional, se
obtiene el siguiente diagrama de bloques para el motor de DC:
Vía
•,
11 -i- S.te
bu 1
Btt+-S.Tin
iWn
Fig. 1.04 Modelo lineal normalizado de una máquina de decon excitación independiente.
Más detalles del proceso de normalización pueden encontrarse
en la referencia [19], capítulo 1.
14
1.1.3 CARACTERÍSTICAS EN ESTADO ESTABLE
Para conseguir las características de estado estable, se
toma el valor medio de las ecuaciones 1, 2, 3, 4 y 5.
Kf- Rf.If (31)
Vt « Ea + fia. la (32)
Te - k$ . la (33)
Te m B.W+ Tf +• Tw (34)
(35)
Combinando las ecuaciones anteriores, se logra obtener:
rr Vt Ra.Te" ~ " - - (36)
W0 en función de los parámetros de normalización, es igual a
VtN0 " ~~ ~
Dividiendo la ecuación 36 por la 37, se tiene:
15
W , Vt . . * N x . Te , . * N, 2m i j i j __ i \ \e la ecuación anterior, se puede observar que existen dos
formas de controlar la velocidad en una máquina de DC con
excitación independiente. La primera consiste en el control
de velocidad por variación de voltaje en la armadura y la
segunda es el control de velocidad por variación del flujo
del campo.
Por ejemplo, si se asume que $ = $N, se tiene:
W Vt Te(39)
TGRB
Esta ecuación representa una relación lineal entre la
velocidad y el voltaje de armadura. Para un torgue dado, se
tendría una recta con pendiente positiva e igual a 1. Para
diferentes valores de Te daría un conjunto de rectas
paralelas entre si.
No es recomendable subir el voltaje de armadura sobre el
voltaje nominal ya que se corre el riesgo de dañar el
colector de la máquina debido a arcos entre delgas que
podrían producirse por el voltaje elevado. Por esta razón,
esta forma de control se recomienda cuando se quiere tener
variaciones de velocidad por debajo de la velocidad nominal
de la máquina.
16
W/Wo
Vf/VflM
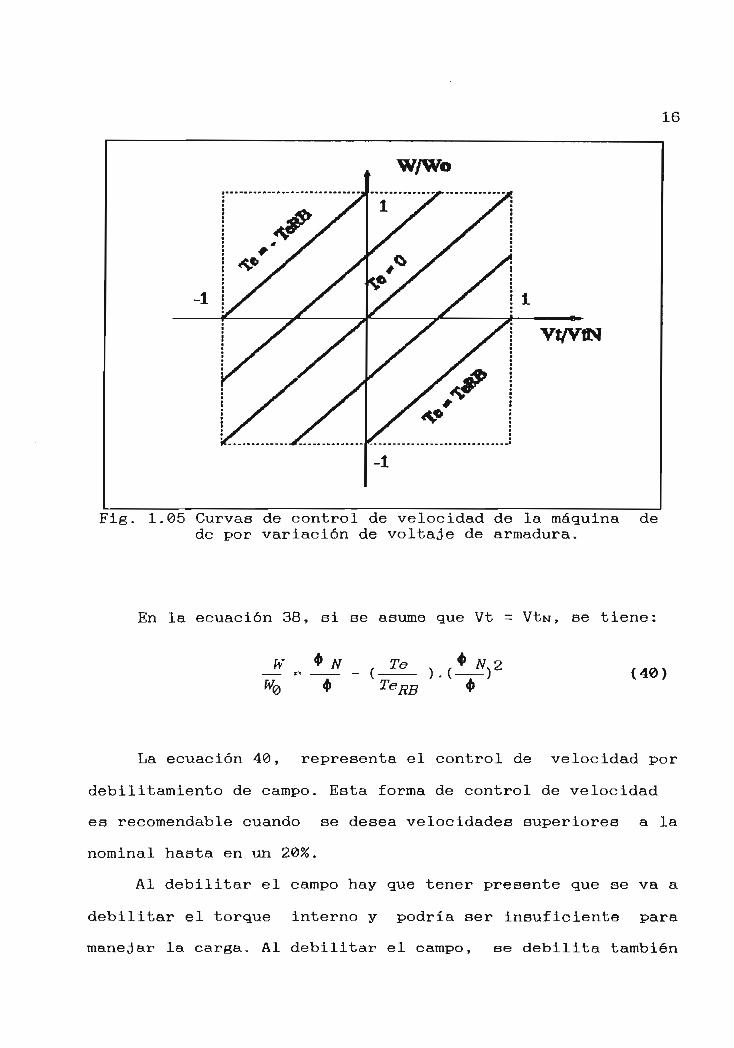
Fig. 1.05 Curvas de control de velocidad de la máquina dede por variación de voltaje de armadura.
En la ecuación 38, si se asume que Vt - VtN, se tiene:
Jv
0
* N Te N 2*•Te
(40)RB
La ecuación 40, representa el control de velocidad por
debilitamiento de campo. Esta forma de control de velocidad
es recomendable cuando se desea velocidades superiores a la
nominal hasta en un 20%.
Al debilitar el campo hay que tener presente que se va a
debilitar el torque interno y podría ser insuficiente para
manejar la carga. Al debilitar el campo, se debilita también

17
el voltaje inducido e implica que aumenta la corriente en la
misma proporción que se redujo el campo, lo cual permite
mantener el torque al eje pero con mayor corriente de
armadura. Hay que tener presente que no se exceda de la
corriente nominal del motor.
A continuación se presentan curvas de variación de
velocidad en función del debilitamiento del flujo de campo,
para valores extremos de Te.
W/Wo
-i T«.-T«RB »/*NI
Fig. 1.06 Control de velocidad de una máquina de de pordebilitamiento del flujo de campo..

18
1.1.4 COMPORTAMIENTO DINÁMICO
La función de transferencia del modelo normalizado de la
máquina de DC dado en la Fig. 1.04, representa un sistema de
lazo cerrado típico de segundo orden, en el cual:
Bnvt,
J^ ±) + S(— + Te) + ( — + 1)Bn 5n Í3
(41)
En la práctica generalmente ocurre que: 1/Bn » 17 en
consecuencia se tiene:
^ « n (TC* j_ OO T (L> . -'—
(42)
r e rffi'r e
Identificando la expresión anterior con la respuesta de un
sistema de lazo cerrado de segundo orden:
C(S) <* n zJ~ m—¿ g (43>
" " n~ n
Donde: ( , G)
representan, el factor de amortiguamiento y la frecuencia
19
natural de oscilación respectivamente.
Se puede obtener la siguiente frecuencia natural de
oscilación:
Nn- (45)
T T1 nr ' e
Te
2.
Bn)
:r=r~ (46)
El factor de amortiguamiento mayor que cero, se da
siempre, para cualquier valor de rm y de Te, por tanto se
tiene un sistema estable.
La condición de subamortiguamiento es el caso que más
comunmente se da dentro de las máquinas eléctricas. Se trata
de conseguir un valor de factor de amortiguamiento igual a
0.707, con lo cual se garantiza que en la máquina de DC no
van a existir tiempos de establecimiento y sobreimpulsos muy
grandes. De eata forma, conocido el factor de
amortiguamiento, se puede encontrar la relación entre rm y
re.
T,
2.
+ Bn
T*
{22
m
20
(47)
mBn (48)
1.1.5 MÉTODOS DE FRENADO
(49)
El máximo sobreimpulso está dado por:
100.exp( -TI. (50)
El tiempo de establecimiento será:
8.T,
T, (51)
Entre los métodos de frenado de las máquinas de DC a
ser analizados, constan los siguientes: Frenado por
inversión, frenado dinámico, frenado regenerativo y frenado
mecánico.
21
1.1.5.1 FRENADO POR INVERSIÓN
Cuando el inducido de un motor de DC funciona en un
determinado sentido y se invierte la polaridad de la tensión
aplicada al inducido, en ese instante la fuerza
contraelectromotríz está en fase con la tensión aplicada. La
tensión total aplicada en bornes del inducido no protegido es
casi dos veces la tensión presente en el momento del arranque
sin resistencia de protección en serie con el inducido.
La máxima corriente permisible (generalmente 1.5 veces
la corriente nominal) en el arranque es la misma que
circularla en el instante en que se inicia el frenado por
inversión.
Una resistencia adicional en serie con el inducido
deberá introducirse para un adecuado frenado por inversión,
de forma que limite la corriente de inducido a un valor de
seguridad.
El anterior consiste en el método más popular de
inversión, es decir, en invertir las conexiones del inducido
a pesar que han de ser interrupidas corrientes fuertes.
La otra forma de inversión, es la de inversión por
campo, lo cual trae algunos inconvenientes, como son:
Abrir el campo para fines de inversión puede ocasionar
embalamiento peligroso, inestabilidad y corrientes de
inducido demasiado altas.
- El campo es más altamente inductivo que el inducido; la
22
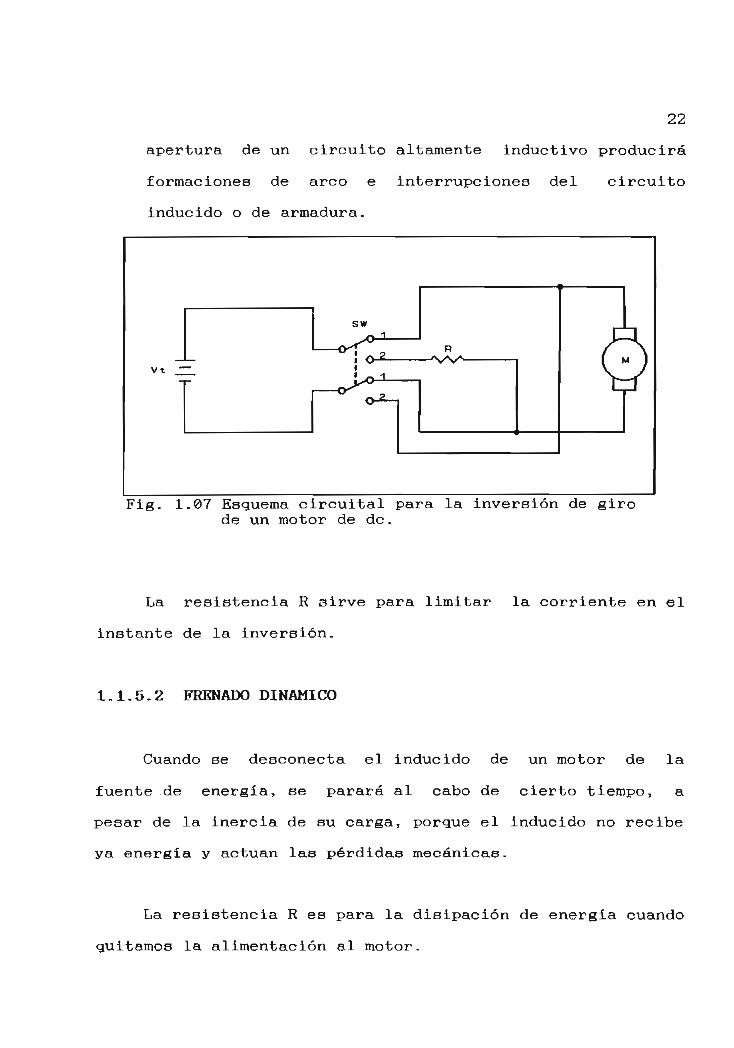
apertura de un circuito altamente inductivo producirá
formaciones de arco e interrupciones del circuito
inducido o de armadura.
Fig. 1.07 Esquema circuital para la inversión de girode un motor de de.
La resistencia R sirve para limitar la corriente en el
instante de la inversión.
1.1.5.2 FRENADO DINÁMICO
Cuando se desconecta el inducido de un motor de la
fuente de energía, se parará al cabo de cierto tiempo, a
pesar de la inercia de su carga, porque el inducido no recibe
ya energía y actúan las pérdidas mecánicas.
La resistencia R es para la disipación de energía cuando
quitamos la alimentación al motor.

23
•
Fig. 1.08 Esquema circuital para el frenado dinámico
1.1.5.3 FRENADO REGENERATIVO
El término regeneración, implica que la energía vuelve o
que la energía retorna a la fuente de alimentación. Por
naturaleza, el frenado regenerativo nace del frenado dinámico
puesto que parece muy lógico no desaprovechar la energía de
rotación de un motor grande (funcionando como generador
durante el frenado dinámico) por disipación en una
resistencia, en lugar de reintegrar esta energía a la fuente
de alimentacion.
En aplicaciones del motor de DC en locomotoras,
trolebuses, autobuses, ascensores» grúas y montacargas
eléctricos, la energía potencial es suficiente (en lo alto de
una pendiente en el caso de tracción o fuerte carga emplazada
para descender en el caso de dispositivos elevadores) para
llevar los ejes del motor a velocidades extremadamente
elevadas. La velocidad de estos motores puede reducirse
24
considerablemente, con un pequeño gasto de energía que no
requiere ningún frenado dinámico o por rozamiento, mediante
la utilización del frenado regenerativo. La energía devuelta
a la fuente puede emplearse para otros motores, dispositivos
o equipo maniobrado.
1.1.5.4 FRENADO MECÁNICO
Los frenos mecánicos accionados electromagnéticamente
suelen emplearse en combinación con el frenado eléctrico. En
el caso de frenado por inversión, la acción de frenado debida
a la polaridad inversa es bastante uniforme a toda velocidad.
En el caso de frenado dinámico, la tensión generada a baja
velocidad es pequeña y la acción de frenado no resulta tan
efectiva para un motor próximo a pararse como lo es para un
motor a la velocidad nominal.
Se utilizan diversos tipos de principios de frenado
mecánico con frenos magnéticos, pero casi todos ellos se
accionan por medio de un electroimán. Cuando se excita el
electroimán, funciona como un solenoide potente para ejercer
fuerza sobre un juego de zapatas, cintas o discos de freno
que a su vez tienden a sujetar un tambor colocado en el árbol
del motor y restringir la rotación.
La ventaja fundamental de un freno electromagnético es
que puede ser accionado eléctricamente a través de un
circuito de control.

25
1.1.6 CUADRANTES DE OPERACIÓN DE LA MAQUINA
Para hacer la representación de los cuadrantes de
operación de la máquina, se ubica sobre un par de ejes
coordenados las variables velocidad versus torque de la
máquina; ambas variables estarán normalizadas.
En el primer cuadrante de operación, torque y velocidad
normalizadas son positivos, es decir, que el torque tiende a
producir una rotación del eje de la máquina en el mismo
sentido en que éer.e gira (esto es lo que se denomina
velocidad positiva o un sentido de rotación positivo).
En el segundo cuadrante de operación, la velocidad sigue
siendo positiva pero el torque ahora es negativo, es decir,
que la máquina trabaja como generador.
En el tercer cuadrante, tanto velocidad como torque son
negativos, es decir, que se tiene a la máquina nuevamente
trabajando como motor al igual que en el primer cuadrante,
pero la diferencia radica en que ahora el sentido de giro que
es contrario o gira con velocidad negativa.
Finalmente, la operación en el cuarto cuadrante, se
tiene un torque positivo y una velocidad negativa, lo cual
hace que la máquina trabaje como generador pero con sentido
de rotación contrario al que se tenía en el segundo cuadrante
y esto es debido a que la polaridad del voltaje generado es
contraria al segundo cuadrante.
En los casos en que la máquina trabaj a como motor, esto
es en el primero y tercer cuadrante, existe un flujo de
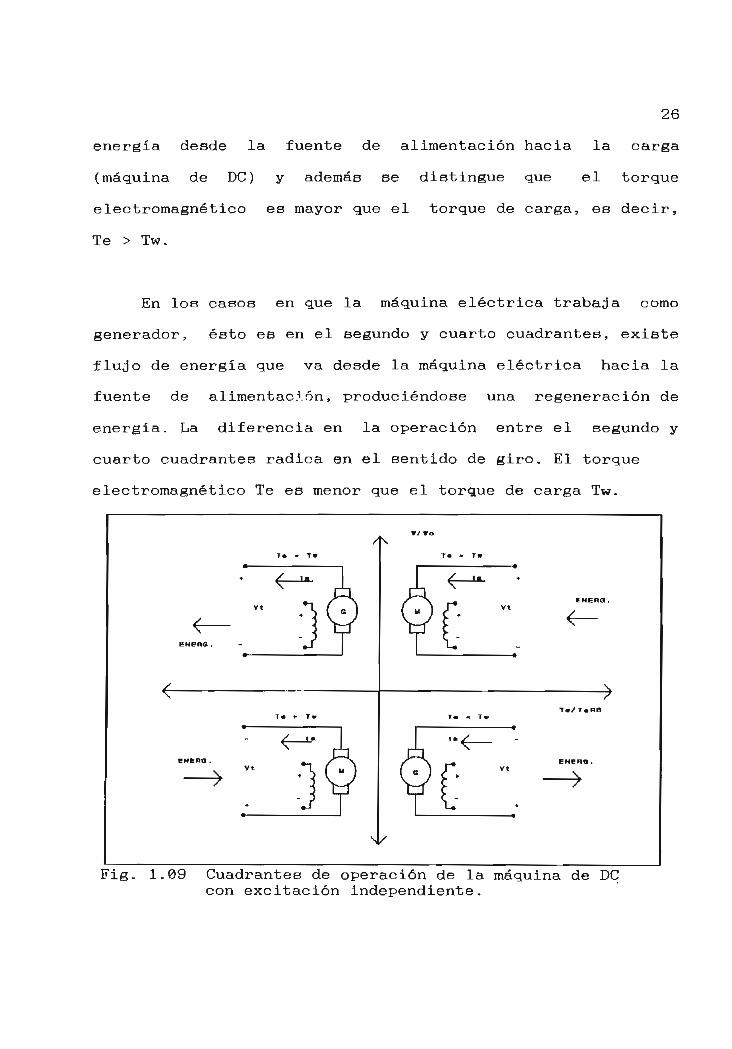
26
energía desde la fuente de alimentación hacia la carga
(máquina de DC) y además se distingue que el torque
electromagnético es mayor que el torque de carga, es decir,
Te > Tw.
En los casos en que la máquina eléctrica trabaja como
generador, ésto es en el segundo y cuarto cuadrantes, existe
flujo de energía que va desde la máquina eléctrica hacia la
fuente de alimentación, produciéndose una regeneración de
energía. La diferencia en la operación entre el segundo y
cuarto cuadrantes radica en el sentido de giro. El torque
electromagnético Te es menor que el torque de carga Tw.
\/
Fig. 1.09 Cuadrantes de operación de la máquina de DCcon excitación independiente.
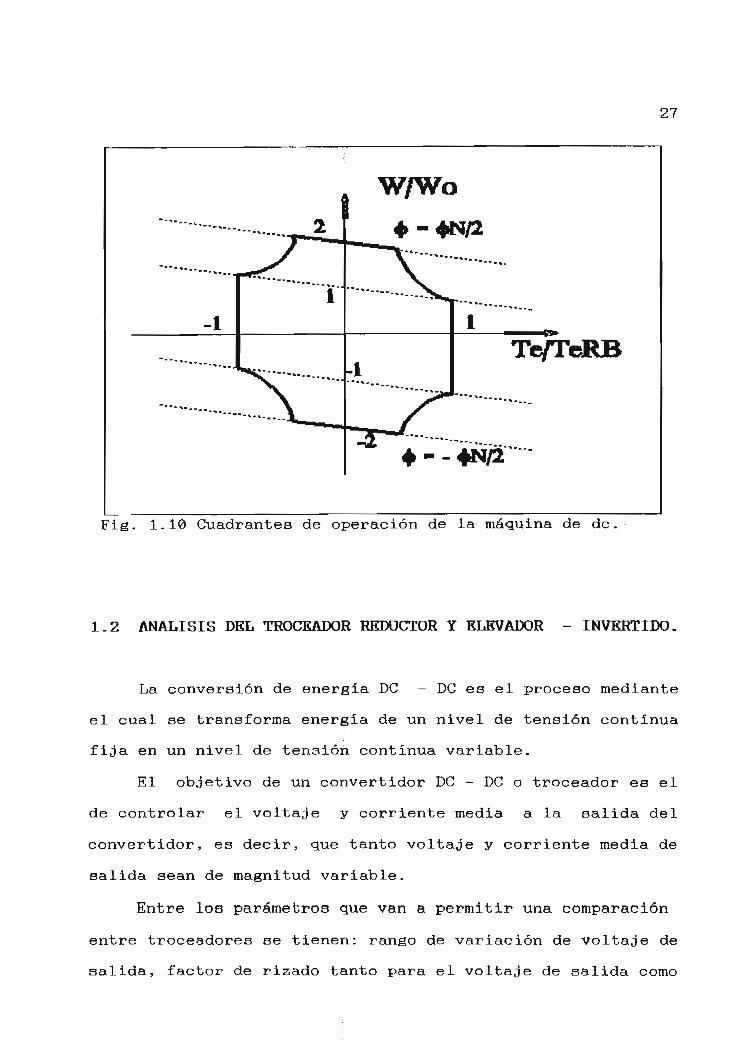
27
Te/TeRB
Fig. 1.10 Cuadrantes de operación de la máquina de de
1-2 ANÁLISIS DEL TROCEADOR REDUCTOR Y ELEVADOR INVERTIDO.
La conversión de energía DC - DC es el proceso mediante
el cual se transforma energía de un nivel de tensión continua
fija en un nivel de tenaióñ continua variable.
El objetivo de un convertidor DC - DC o troceador es el
de controlar el voltaje y corriente media a la salida del
convertidor, es decir, que tanto voltaje y corriente media de
salida sean de magnitud variable.
Entre los parámetros que van a permitir una comparación
entre troceadores se tienen: rango de variación de voltaje de
salida, factor de rizado tanto para el voltaje de salida como
28
para la corriente de salida, rendimiento del convertidor o
troceador, potencia del convertidor, rizado de corriente de
la fuente.
La fuente de alimentación de un troceador podría ser un
banco de baterías o la calida de un rectificador.
Las cargas típicas para convertidores DC - DC son de
tipo R ~ L - V, en el manejo de máquinas de corriente
continua.
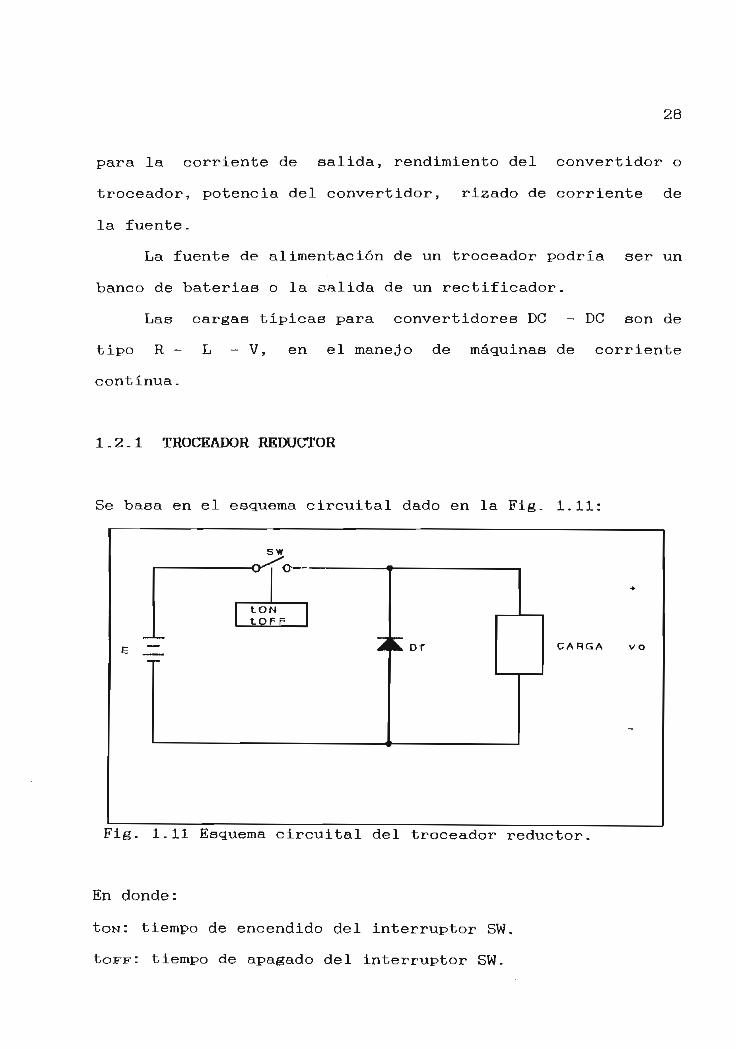
1.2.1 TROCEADOR REDUCTOR
Se basa en el esquema circuital dado en la Fig. 1.11:
sw
DT CARGA vo
Fig. 1.11 Esquema circuital del troceador reductor.
En donde:
ton: tiempo de encendido del interruptor SW.
: tiempo de apagado del interruptor SW.

29
Tch: período de operación del troceador.
Sea: tow = a = ancho del pulso de encendido del SW.
toFF = b - ancho del pulso de apagado del SW.
Tch ~ a + b
La forma de onda ideal de voltaje sobre la carga es la
siguiente:
B
vo
toa
Tth•iBl! I! •!•••
taff
Vo t
Fig. 1.12 Voltaje de salida del troceador reductor.
El valor medio del voltaje de salida está dado por:
CH
VoCH 0
(52)
Vo « -- .BTCH
(53)
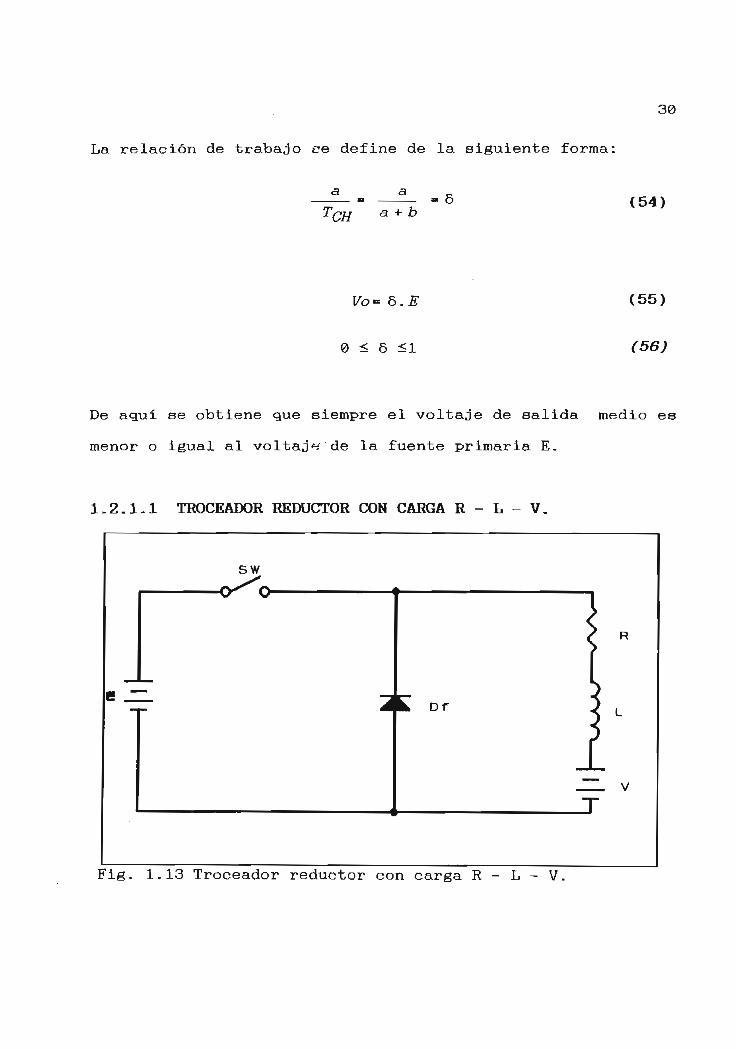
La relación de trabajo se define de la siguiente forma:
TCH a+b(54)
Vo m 8 . E
0 < 6 <
(55)
(56)
De aquí se obtiene que siempre el voltaje de salida medio es
menor o igual al voltaje de la fuente primaria E_
1.2.1.1 TROCEADOR REDUCTOR CON CARGA R - L - V.
sw
R
Fig. 1.13 Troceador reductor con carga R - L - V.
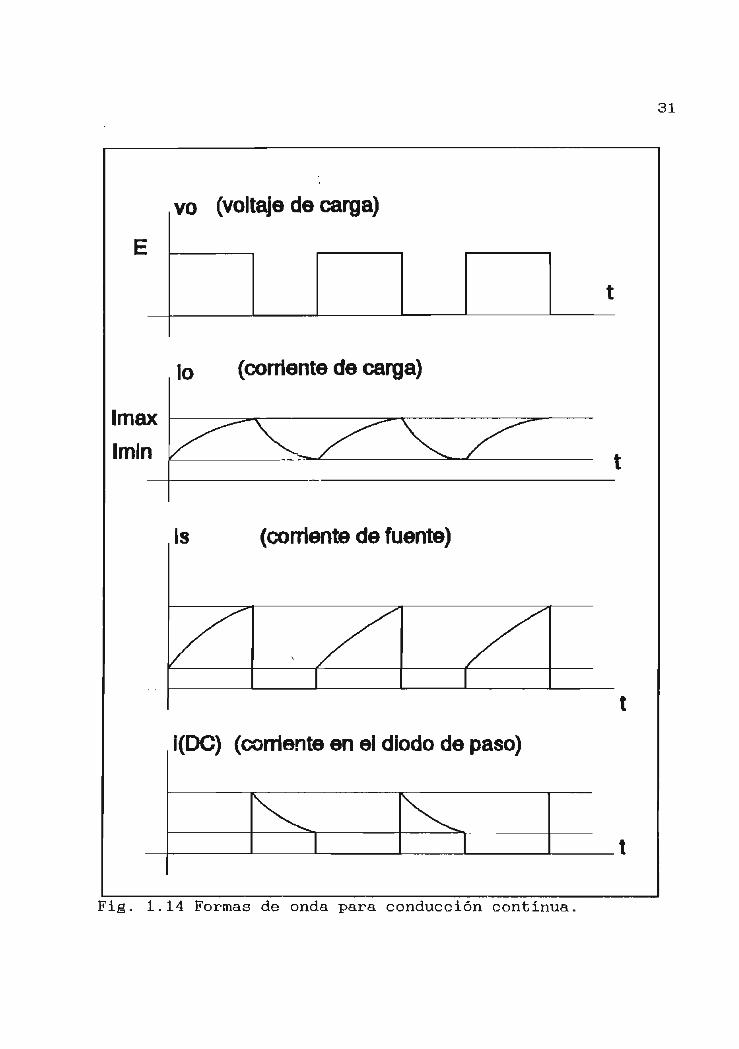
31
vo (voltaje de carga)
ImaxImln
io (corriente de carga)
Is (corriente de fuente)
i(DC) (corriente en el diodo de paso)
Fig. 1.14 Formas de onda para conducción continua,
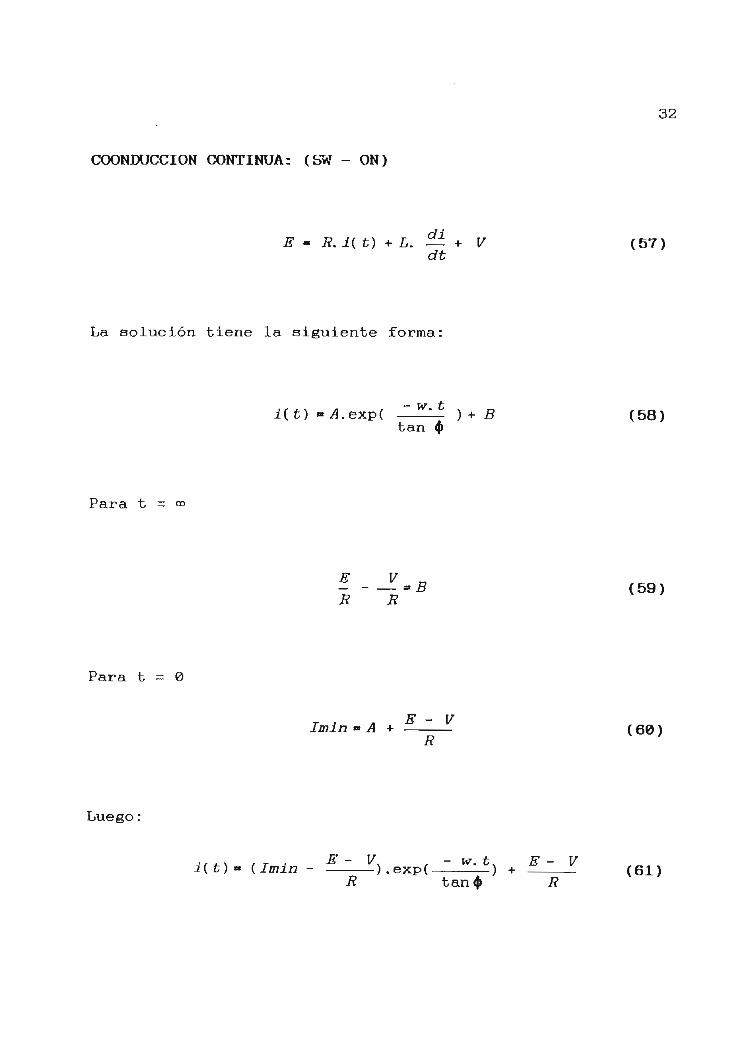
COONDUCCION CONTINUA: (SW - ON)
La solución tiene la siguiente forma:
Para t = °o
Para t - 0
Luego:
tan
32
E « 7?. i( t) + L. — + V (57)dt
(58)
E V- - — ~B (59)R R
E - VImin^A + (60)
(Imin - £ -).exp( " w* fc) * Z (61)? tan 4» ^

33
Para t = a, i = Imáx
T- r „ - v. a. E- V , . , - t v . a ^ , , ««*I/nax = 7/?3Írí.exp( ) + -. (1 - exp( )) (62)taníj» R tan
SWITCH OFF:
0 - R. i( t) + L. — + V (63)c/fc
La solución tiene la forma:
- w. ttan
Para t -
Para t = 0, i = Imax
Para t - b, i - Imín
* (Imax+ -— ).exp(tan 7?
(64)
B» -— (65)
Imax« A - — (66)
34
Para Imín e Imáx se tiene:
f f ~ - \ - . . ,„„,__ . (exp( - ) - exp( - ) ) - — (68)R tan <£ tan <p R
E. , , - <a. a. .-(1 - exp( - — ))r R tañí VImax - - - —
., . - v.Tch.. R(1 - exp(tan
Para el rizado de corriente de salida se tiene:
A lo • 7/nax - Imin
A Jo * £ tan * tan * (71)R .. . - ox rc(1 -exp( —- ) )
tan <p
1.2.2 TROCEADOR ELEVADOR - INVERTIDO.
LF
\W
< >
Eg
Fig. 1.15 Esquema circuital del troceadorelevador a ser utilizado.
35
El modelo circuital es el siguiente:
*1 sw
<
Fig. 1.16 Esquema circuital del troceadorelevador con carga R - L - V.
36
CONDUCCIÓN CONTINUA
veEo
(voltaje do «alkte)
tlo (corriera» do aaltóa)
Fig. 1.17 Formas de onda de voltaje de salida,corriente de salida y corriente ensw para conducción continua en eltroceador elevador.
SW ON:
0 —dt
V (72)
La solución general tiene la forma:
¿(t)tan 4»
(73)
Para t ~ 0, i - Imin
A + B (74)

Para t =
37
(75)
Con lo que se obtiene:
tan $ ./?(76)
SW OFF:
t) + L. — + Edfc
(77)
La solución general tiene la forma:
¿(t)-¿.exp(tan <p
(78)
Para t = 0 , i = Imáx
Imax» A + B (79)
Para t =
BR
(80)

38
Con lo que se tiene lo siguiente :
(Imax- ).exp( " ) + (Bl)^ tan $ R
Para Imín e Imáx, se tiene:
V , <a .Tch^ E ,- -exp( - - — ) - -.exp( -
, , R tan* R tan $ RImln « - - - - - -1 . u.Tch.l-exp( - - -)
tan *
V - E
R<a. Tch.
Di — )tr \tan 4*
ER
<a atan*
VR
6) _ Tch1 _ e*vnf ~ }
Imax1 - exp( -
tan *
El rizado de la corriente será:
ER
aTchtan *
^ /) 4- — . ( exp ( -R
<o. a ^tan *
4- exp( - <a £?tan*
£"~fí
. . to.Tch.\ pavní — >
tan 4»
1.3 ANÁLISIS DEL TROCEADOR DE DOS CUADRANTES:
Este troceador, fundamentalmente está conformado por el
acople de dos tipos de troceadores ya estudiados, el reductor
y el elevador - invertido. La técnica de control del
troceador de dos cuadrantes puede ser con control simultáneo
y con control no simultáneo.
39
S1D2
\ S2
LF
D1
Fig. 1.18 Esquema circuital del troceador en doscuadrantes.
Para definir los cuadrantes, se utiliza el plano formado por
los ejes torque (X) y velocidad (Y).
Justamente los dos tipos de controles se diferencian en
la forma de manejarse o de controlarse los interruptores SI y
S2.
En el control simultáneo, el troceador reductor opera al
cerrarse SI durante una fracción del período de operación del
troceador, durante este tiempo el ewitch S2 estará abierto,
es decir, que el troceador elevador no estará en operación.
En el resto de la fracción del periodo operará el
troceador elevador, apagándose el reductor, es decir, S2

40
cerrado y SI abierto. Podemos decir que en un período
completo de operación del troceador han trabajado el
troceador reductor y el freno regenerativo, el uno en una
fracción del período total de operación y el otro en el resto
del tiempo de dicho período.
En el control no simultáneo, en un período de operación
del troceador, sólo ur.o de los troceadores que lo conforman
puede operar a la vez.
1-3.1 ANÁLISIS DEL TROCEADOR CON CONTROL NO SIMULTANEO.
En este caso el control de los interruptores se lo
realiza de la siguiente forma: SI por la técnica de
modulación del ancho de pulso (PWM) y S2 por la técnica de
control de rizado.
En el primer caso, del troceador reductor, la energía
fluye de la fuente primaria E hacia la carga, en este caso la
máquina opera como motor, teniéndose sobre la carga un
voltaje medio de salida que varía entre 0 y E, y con una
corriente media de salida que es positiva, por lo cual la
máquina opera en el primer cuadrante.
El troceador elevador - invertido actúa como freno
regenerativo, la energía fluye de la máquina eléctrica hacia
la fuente primaria E, ^n este caso, la máquina opera como
generador en el segundo cuadrante, debido a que sobre la
41
carga se tiene voltaje medio de salida positivo y corriente
media de salida que es negativa.
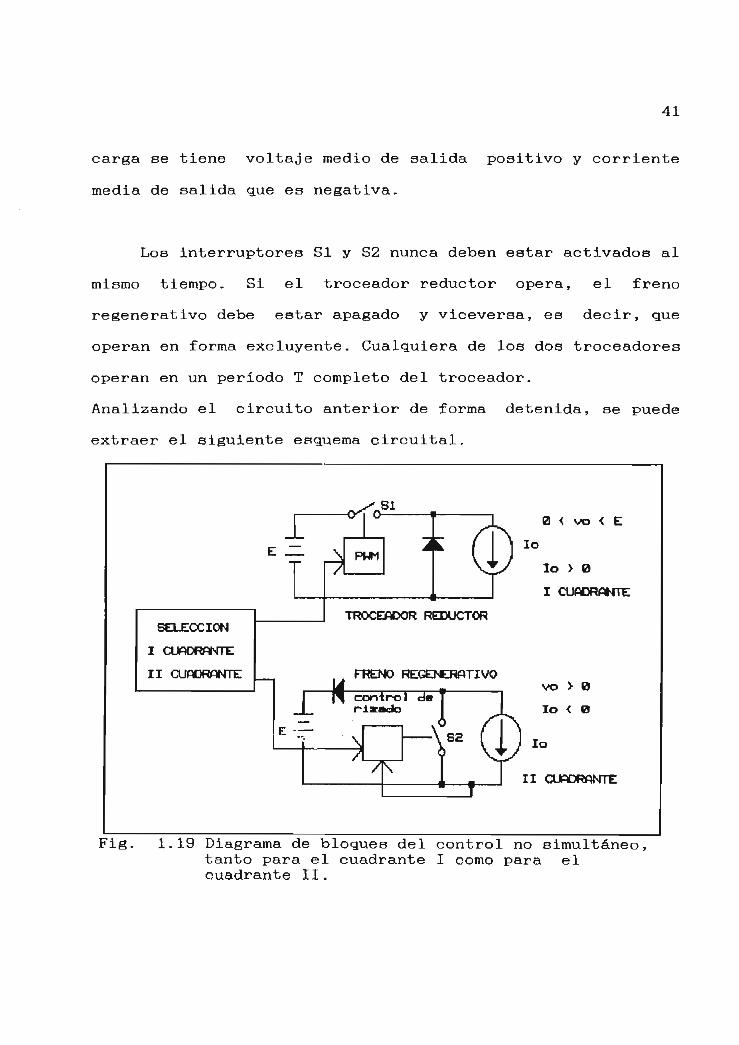
Los interruptores SI y S2 nunca deben estar activados al
mismo tiempo. Si el troceador reductor opera, el freno
regenerativo debe estar apagado y viceversa, es decir, que
operan en forma excluyente. Cualquiera de los dos troceadores
operan en un periodo T completo del troceador.
Analizando el circuito anterior de forma detenida, se puede
extraer el siguiente esquema circuital.
0 < vo < E
10 > 0
1 CUfiDRñMTE
SELECCIÓN
I CUñDRfiNTE
ii
II CUftDRftNTE
Fig. 1.19 Diagrama de bloques del control no simultáneo,tanto para el cuadrante I como para elcuadrante II .
42
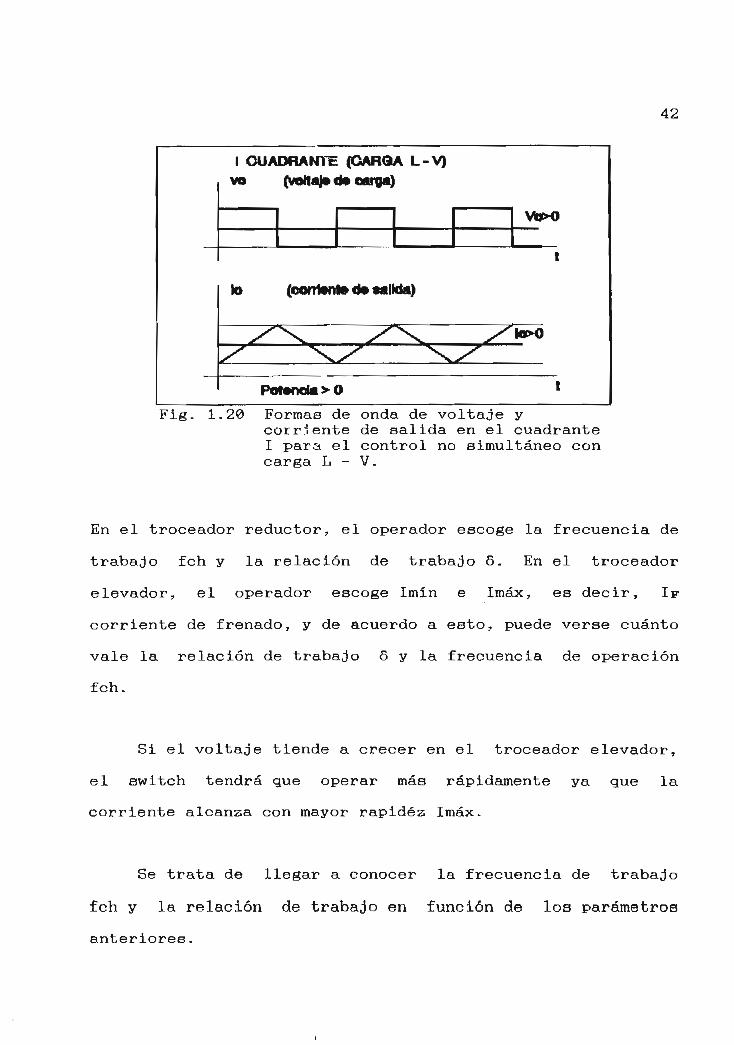
1 CUADRARTE (GAHOA L-V)
vo>c
i
Fig. 1.20 Formas de onda de voltaje ycorriente de salida en el cuadranteI para el control no simultáneo concarga L - V.
En el troceador reductor, el operador escoge la frecuencia de
trabajo fch y la relación de trabajo 6. En el troceador
elevador, el operador escoge Imín e Imáx, es decir, IF
corriente de frenado, y de acuerdo a esto, puede verse cuánto
vale la relación de trabajo 6 y la frecuencia de operación
fch.
Si el voltaje tiende a crecer en el troceador elevador,
el switch tendrá que operar más rápidamente ya que la
corriente alcanza con mayor rapidez Imáx.
Se trata de llegar a conocer la frecuencia de trabajo
fch y la relación de trabajo en función de los parámetros
anteriores.
43
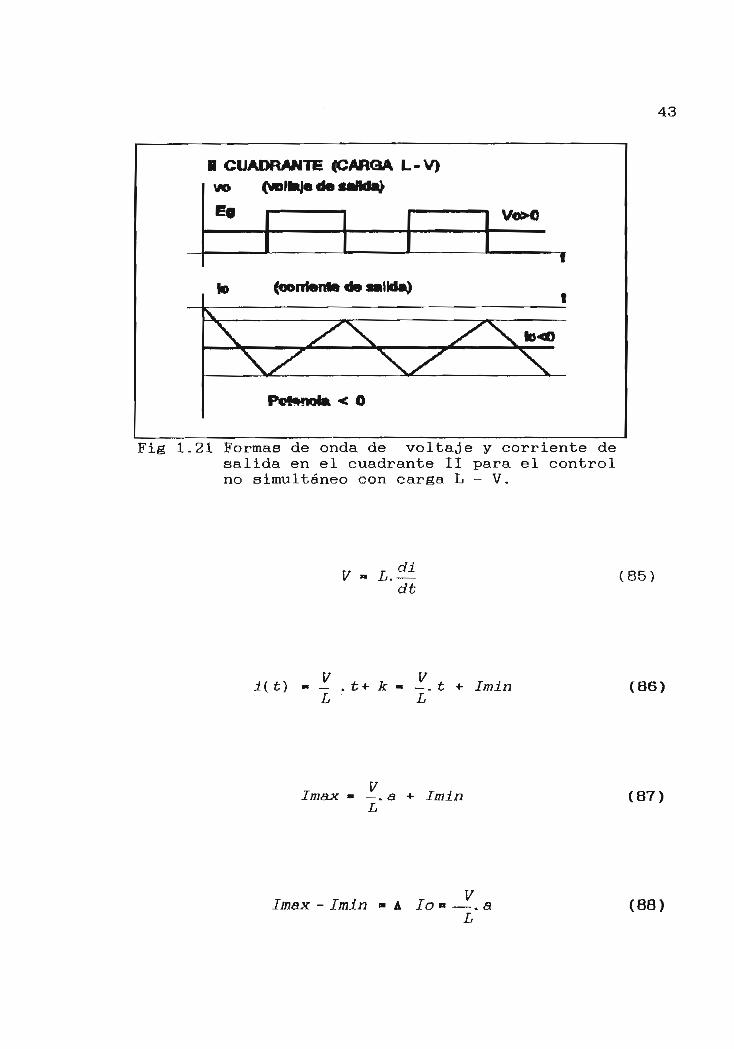
U CUADRANTE (CARQA L-V>ve-
lo (oontonto «te mlWk)
Fig 1.21 Formas de onda de voltaje y corriente desalida en el cuadrante II para el controlno simultáneo con carga L - V.
V » L. (85)
i( t) * - . t+ k - -. t -i- IminL L
(86)
Imax « — .a +• IminL
(87)
I/nax - Jjniw « A lo « —.aL
(88)

Cuando SW OFF:
E ~ V
Por lo tanto, se puede escribir lo siguiente
aV
bE - V
44
V- J E T - L-— <8 9>dt
.t +Imax (90)
Imln , - E - V. b + Imax (91)
Imax - Jinln- A Jo *» — - ¿> (92)
(93)
A Jo- (94)
45
Tch - a+ £> - U lo. £).( + ——) (95)V E - V
6 - _JL - •g" y « (1 - Y.) (96)j£ E
1.3.2 ANÁLISIS DEL TROCKADOR CON CONTROL SIMULTANEO.
El esquema circuital permanece igual que en el control
no simultáneo. La diferencia radica en el hecho de que aquí
los dos interruptores son controlados por la técnica PWM,
pero siempre considerando que nunca los dos interruptores
estarán activados al mismo tiempo.
Considerando la operación del troceador en un período,
en este tipo de control, el troceador reductor opera durante
una fracción del período total, es decir, k.T, donde 0 < k <
1 y el resto del período, es decir (1 - k.T) opera el freno
regenerativo.
En la Fig. 1.22 «e presenta un análisis de las formas de
onda de vo e io para distintos valores de relación de
trabajo.
En los gráficos a presentarse, Pn, representa la
potencia neta en un período completo de operación.
En la Fig. 1.22, se observa, que para una relación de
trabajo 6 que tiende a 1, al cerrar el switch SI, la
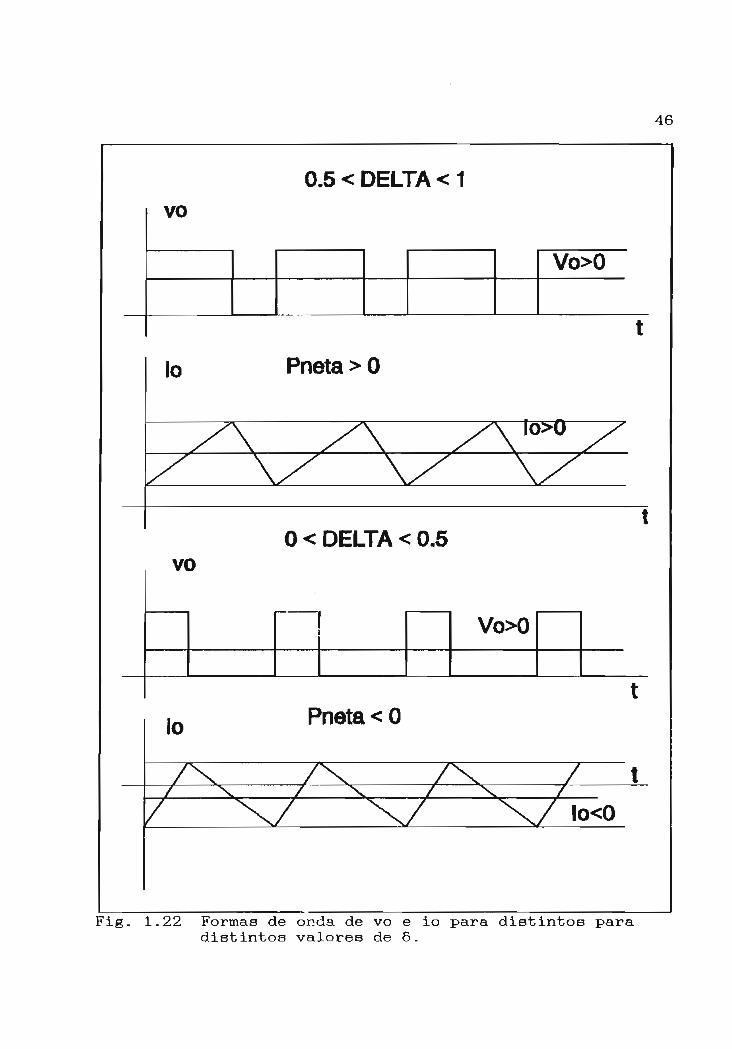
46
VO
io
0.5 < DELTA < 1
Pneta > O
Vo>0
ToXX
voO < DELTA < 0.5
Vo>0
io Pneta < O
lo<0
Fig. 1.22 Formas de onda de vo e io para distintos paradistintos valores de 6.
47
corriente circula hacia la carga, y el voltaje sobre la carga
es E, al abrir SI entra a conducir el diodo DI y el voltaje
sobre la carga es prácticamente cero. En este caso S2 no
entra en conducción. El flujo de potencia neta es de la
fuente primaria hacia la carga y la máquina eléctrica
funciona como motor en el cuadrante I.
En el segundo caso, para 8 > 0.5, cuando la corriente en
DI es cero, entra a conducir el switch S2 y la corriente
empieza a incrementarse negativamente, la carga se comporta
como fuente de corriente en sentido contrario, por lo que al
abrir S2, la corriente fluye desde la carga a través de D2
hacia la fuente primaria. Cuando la corriente es cero, el
diodo D2 deja de conducir y entra nuevamente el switch SI.
Tomando como referencia un período completo de
operación, existen intervalos de período en los que la
potencia instantánea es mayor que cero, y otros intervalos en
los que la potencia instantánea es menor que cero; es decir
que hay fracciones de período donde la energía fluye de la
fuente hacia la carga y otras fracciones donde la energía
fluye de la carga hacia la fuente. En todo caso, el flujo
neto de potencia en un período completo de operación es
positivo, es decir, que en estado estable el flujo neto de
potencia es de la fuente hacia la carga y el troceador opera
en el cuadrante I.
48
En el caso en que la relación de trabajo 6 es semejante
a 0 . 5, la corriente media de salida es lo = 0. La potencia
neta en un periodo completo de operación es cero, lo que
quiere decir que las fracciones de periodo donde la potencia
instantánea es mayor que cero son iguales a las fracciones de
periodo donde la potencia instantánea es menor que cero. Lo
anterior significa que el flujo de potencia en las fracciones
de periodo que va de la fuente hacia la carga es igual al
flujo de potencia en las fracciones de período de la carga
hacia la fuente. Pero la potencia neta en un periodo completo
de operación es cero.
En el caso en que la relación de trabajo 6 < 0.5, la
corriente media de salida es negativa, por lo que el flujo
neto de potencia en un período completo es negativo, esto
hace que el flujo neto de potencia por período sea de la
máquina eléctrica hacia la fuente, teniéndose que en estado
estable el troceador opera en el segundo cuadrante.
Cuando la relación de trabajo 8 tiende a cero, la
corriente media de salida es negativa, el flujo neto de
potencia es de la máquina eléctrica hacia la fuente primaria,
y en estado estable el troceador opera en el cuadrante II.
Para este caso, los únicos que actúan son S2 y D2, esto
en la etapa de freno regenerativo.
49
1.3.3 COMPARACIÓN ENTRK LOS DOS TIPOS DE CONTROLES.
En el modo de control no simultáneo:
- La operación de los dos troceadores es excluyente.
- El cambio de un cuadrante a otro se produce de forma
brusca.
Cada uno de los troceadores componentes opera en un
período completo de trabajo.
Es un circuito autoprotegido, por lo que se pueden
efectuar arranques bruscos a la máquina.
En un período completo de operación del troceador, el
flujo de potencia es unidireccional, dependiendo del
troceador que se haya elejido.
En el modo de control simultáneo:
- Existe un potenciómetro para efectuar la conmutación de
un cuadrante a otro, es decir, la conmutación se realiza
de forma suave a través del potenciómetro que varía la
relación de trabajo 6.
Se requiere aquí que la carga sea activa: R - L - V.
No es un circuito autoprotegido.
50
- Uno de los trcceadores componentes opera por una
fracción del período total y el resto del tiempo opera
el otro troceador.
En un período completo de operación del troceador, se
tiene flujos de potencia bidireccionales.
La relación exacta de trabajo que permite cambiar de un
cuadrante a otro en este tipo de control se produce cuando
Io=0.
Cuando SI está cerrado, se tiene que:
8.(E - V) = (1 - 6).V
donde: 6 = V / E Sin componente
resistiva en la carga.
Suponiendo que la carga tiene componente resistiva.
6 = V 4- R.Io
donde: 6 = (V + R.Io) / E
CONTROLES:
Un control realimentado de velocidad, no tiene sentido,
ya que no interesa en absoluto mantener una velocidad
constante en un punto prefijado de trabajo.
El control de velocidad se lo hará por variación de
voltaje de inducido, por lo cual se deberá poder variar
el ancho del pulso del 0% al 100% con el fin de lograr
51
un control desde 0 r.p.m. hasta la velocidad nominal.
El control de aceleración - frenado, lo constituirá el
selector por medio del cual el operador puede elejir el
cuadrante de operación de la máquina en el momento que
desee.
11
TROOKADOR PARA KL
OK HA MAQUINA KN DOS

52
CAPITULO II: DISEKO DEL TROCEADOR PARA EL CONTROL DE LA
MAQUINA EN DOS CUADRANTES.
En este capitulo se tratarán los requerimientos para el
diseño, es decir, las especificaciones de la carga y las
especificaciones del troceador; aspectos tecnológicos que se
refieren a la máquina cuando ésta es controlada mediante cada
técnica de control, la interpretación de la potencia en cada
cuadrante, consta aquí el diagrama general de bloques, modelo
del control, modelo del troceador, modelo de la carga, modelo
general en base a datos medidos en el equipo; diseño del
sistema, donde constan los diseños del circuito de potencia,
circuito de control, circuitos manejadores de base, snubbers
y protecciones de todo el módulo didáctico.
2,1 REQUERIMIENTOS PARA EL DISERO
Los requerimientos necesarios para realizar un buen
diseño contemplan el conocimiento de la carga que se va a
manejar, es decir, el dato de placa de la máquina de DC.
53
2.1.1 ESPECIFICACIONES DE LA CARGA (MAQUINA DE DC)
En lo que tiene que ver a las especificaciones técnicas
de la carga, se tienen las siguientes que son extraídas del
respectivo dato de placa de la máquina.
MAQUINA 1: MAQUINA 2:
Cat. No. CDP 3440 Cat. No. CDP 3455
SPEC. 34-4401-3662 SPEC. 34-4401-3865
Frame; 56c 428p Frame; 56c 435p
Potencia: 3/4 HP. Potencia: 1 HP.
Voltaje: 90 V. Voltaje: 180 V.
Corriente: YA. Corriente: 5A.
Clase B Clase F
Carga continua Carga continua
SER. No. W386 SER. No. w586
Temp. Amb: 40 C Temp. Amb: 40 C
Las dos máquinas están disponibles en el Laboratorio de
Electrónica de Potencia y están acopladas mecánicamente a
través de su eje.
ESPECIFICACIONES DEL CONVERTIDOR
El convertidor que se ha elegido es el convertidor DC -
DC a base de transistores con control simultáneo y no
simultáneo.
54
La configuración escogida permite controlar una máquina
DC en dos cuadrantes (I y II).
En el control simultáneo operan los dos transistores en
un mismo periodo de trabajo, obteniéndose el funcionamiento
de la máquina DC como motor y como generador. Si el valor de
corriente media sobre la carga es mayor que cero, la máquina
funciona como motor en el cuadrante I con un flujo neto de
potencia en un periodo completo que va desde la fuente hacia
la carga. La técnica de control empleada es la modulación por
ancho de pulso, teniéndose además acceso a variar la
frecuencia desde 100 Hz. hasta 2.5 KHz aproximadamente. Si el
valor medio de corriente sobre la carga es menor que cero, la
máquina funciona como generador en el segundo cuadrante, con
un flujo neto de potencia en un periodo completo que va desde
la carga hacia la fuente.
En el control no simultáneo, sólo puede operar un
transistor en un periodo completo de trabajo, el que se
elija. Si se escoge al transistor superior del semipuente, lo
hará con técnica PWM, con opción asi mismo a variar
frecuencia de operación entre 100Hz y 2.5 KHz y relación de
trabajo 6 entre 0 y 1, con esto se consigue controlar la
velocidad del motor desde 0 hasta la velocidad nominal. En
este caso la máquina opera como motor en el primer cuadrante.
Cuando se selecciona el transistor inferior del
semipuente se realiza un control de rizado, donde es posible
elejir la corriente de carga máxima y minima para operación,
es decir, una cierta corriente media de frenado. El circuito
55
sensa a través de una resistencia de bajo valor la corriente
de carga y en función cíe esto se tiene el cierre o apertura
del transistor de potencia. Para este caso, la relación de
trabajo y la frecuencia de convertidor estarán dadas en
función de Imáx e Imín.
Teniendo en cuenta lo anterior y las características de
la carga se pueden escribir los siguientes especificaciones
generales del troceador:
a) XÍPQ de convertidor.!. Troceador DC - DC, configuración
semipuente (cuadrantes I y II).
b) Voltaje de alimentación: 150 VDC.
c) Go_r.r_ie_nte nQminaJL_de salida: 7A.
d) £oJ ejicJ a_dfe ^ 1 HP.
e) Tipo de Control: - Control Simultáneo.
- Control No-Simultáneo.
f) Raneo de variación de velocidad: 0 - 100% de velocidad
nominal.
g) Fuente Primaria de DC: Externa, 0 - 150VDC.
h) Fuentes del circuito de control: 4 fuentes independientes
de + 12V, +5V, -5V, -12V.
2.2 ASPECTOS TÉCNICOS.
El funcionamiento de la máquina de DC en uno u otro
cuadrante de operación va a depender del tipo de troceador
que esté en funcionamiento.
Por ejemplo, si un vehículo eléctrico, que disponga de
control no simultáneo, y está en pleno ascenso, tendrá su
56
máquina de DC trabajando como motor. Es decir, se está
entregando energía desde las baterias a la máquina. En el
caso de que el vehículo eléctrico esté en descenso, la
energía potencial se transforma en energía cinética para que
sea aprovechada por el sistema. Deberá existir en el propio
vehículo uri sistema detector de pendiente con objeto de
efectuar la conmutación automática del primero al segundo
cuadrante. En este caso la máquina trabaja como generador
obteniéndose un freno regenerativo. Ahora, la corriente de
regeneración fluye desde la máquina hacia el banco de
baterías, provocando su recarga. Cabe señalar, que este tipo
de freno sólo va a lograr que el vehículo reduzca su
velocidad. Para lograr que el vehículo se detenga, el freno
regenerativo debe estar respaldado por un freno mecánico.
En el caso de una banda transportadora con motor DC para
su tracción y que disponga de control simultáneo, va a
existir fracciones del período de trabajo donde hay
regeneración y otras fracciones de período de trabajo donde
la energía fluye de la fuente DC hacia la carga. En este
caso, cuando se cargue a la banda transportadora, ésta
sufrirá una pequeña disminución en la velocidad que luego de
corto tiempo se verá recuperada por la propia acción del
control, ya que durante un mismo período de trabajo existe
tanto la acción de frenado regenerativo, como la acción
motriz.
A través de este tipo de control se obtienen mejores
características dinámicas en la respuesta del sistema.
57
2-2.1 INTERPRETACIÓN DEL SIGNIFICADO DE LA POTENCIA EN CADA
CUADRANTE.
Se denominará como potencia positiva a aquel flujo neto
de potencia que en un período completo de operación va desde
la fuente primaria hacia la carga (máquina DC), obteniéndose
que la máquina funcione como motor.
Potencia negativa es aquella en que el flujo neto de
potencia en un período completo de operación va desde la
carga hacia la fuente primaria, obteniéndose la operación
de la máquina como generador.
En la operación del control no simultáneo en el
cuadrante I se tiene siempre potencia positiva y la máquina
funcionando como motor. En el cuadrante II se tiene potencia
negativa y la máquina trabajando como generador.
En el control simultáneo, para cierto rango de relación
de trabajo, se tiene que en un período completo de operación
del troceador, existen tramos del período total en los que la
potencia es positiva y otros tramos en donde la potencia es
negativa. Dependiendo de cual tiene mayor potencia, se tiene
la potencia neta en un período completo y su respectivo
cuadrante de operación. Existe un determinado valor de
relación de trabajo 8 para el cual los tramos de potencia
positiva y negativa son iguales en un período completo de
operación; esto quiere decir que el flujo neto de potencia es
cero y el valor medio de corriente de salida es cero.
58
2.3 MODELO Y FUNCIÓN DE TRANSFERENCIA DEL SISTEMA EN DOS
CUADRANTES.
2.3.1 DIAGRAMA DE BLOQUES GENERAL DEL SISTEMA.
FUHMTBS D.C.PARA BL CONTROLSIMULTANEO
CONTROLP.W.M.
CONTROLSIMULTANEO
FUENTEPRIMARIA DE
D.C,
SELECTOR DETRES
POSICIONES
APAGADO
CARGA
FUBsmES D.C.
PARA B. CONTROL
NO-SIMULTANEO
_ CONTROL P.W.M._ CONTROL RIZADO
CONTROL NOSIMULTANEO
Fig. 2.01 Diagrama de bloques general del sistema,
59
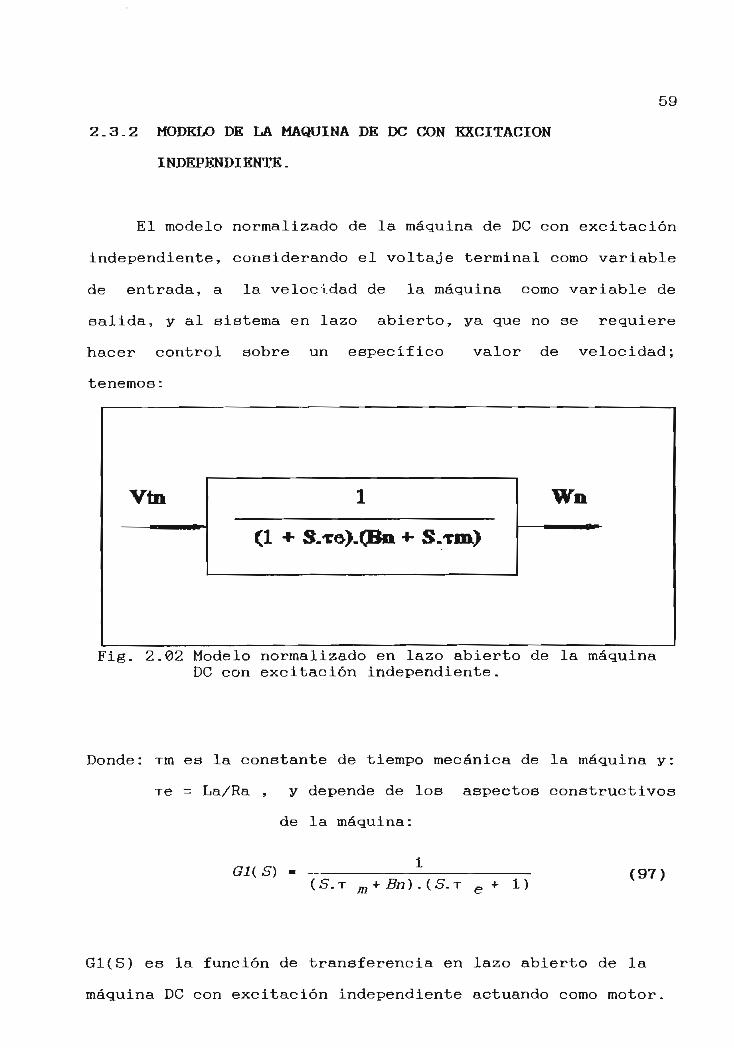
2.3.2 MODELO DE LA MAQUINA DE DC CON EXCITACIÓN
INDEPENDIENTE.
El modelo normalizado de la máquina de DC con excitación
independiente, considerando el voltaje terminal como variable
de entrada, a la velocidad de la máquina como variable de
salida, y al sistema en lazo abierto, ya que no se requiere
hacer control sobre un especifico valor de velocidad;
tenemos:
Vto 1
(1 •*• S.Tc)-CBa •*• S.Tm)
Wn
Fig. 2.02 Modelo normalizado en lazo abierto de la máquinaDC con excitación independiente.
Donde: rm es la constante de tiempo mecánica de la máquina y:
Te = La/Ra , y depende de los aspectos constructivos
de la máquina:
G1(S)(¿T.T (97)
e
G1(S) es la función de transferencia en lazo abierto de la
máquina DC con excitación independiente actuando como motor.
60
2.3.3 MODELO DEL TROCEADOR DC - DC.
Haciendo referencia al troceador reductor, en el cual se
tiene: Vo = Ó#E ; siendo E el voltaje de la fuente primaria
y 8 es la relación de trabajo que en este caso podrá variar
de 0 a 1, por lo cual el voltaje a la salida del troceador
será menor o a lo mucho igual al voltaje E.
Considerando que la variable de salida es Vo y la de
entrada es 6, se tiene G2(S) la función de transferencia del
troceador:
G2(S) » -— - E (98)
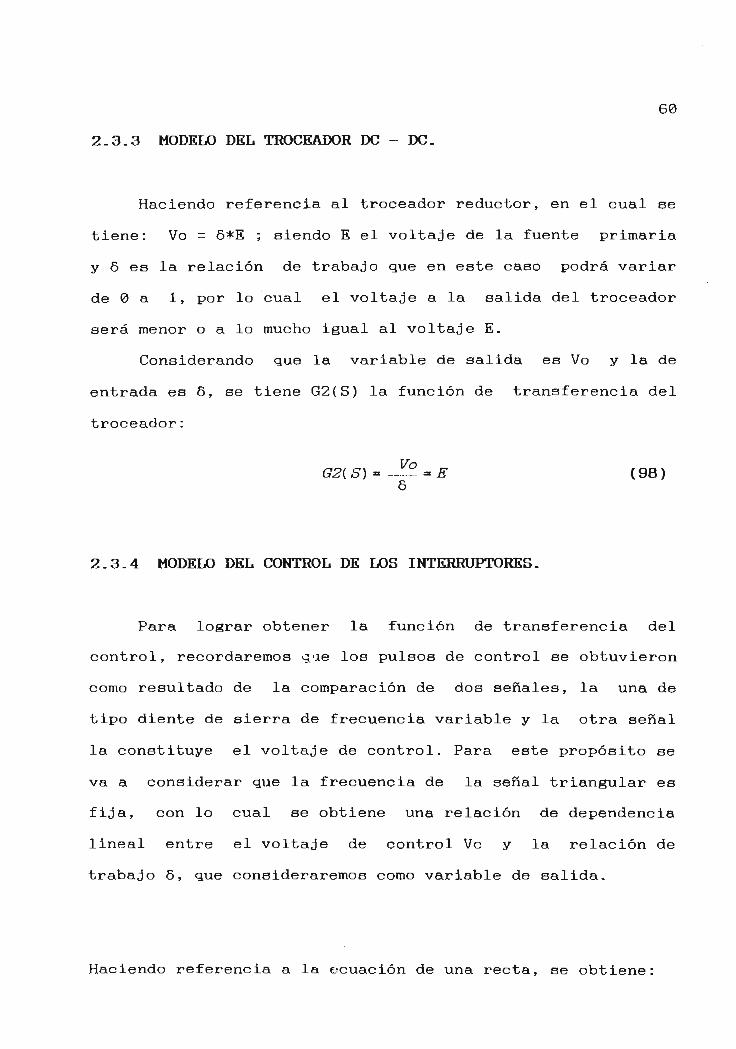
2.3.4 MODELO DEL CONTROL DE LOS INTERRUPTORES.
Para lograr obtener la función de transferencia del
control, recordaremos qae los pulsos de control se obtuvieron
como resultado de la comparación de dos señales, la una de
tipo diente de sierra de frecuencia variable y la otra señal
la constituye el voltaje de control. Para este propósito se
va a considerar que la frecuencia de la señal triangular es
fija, con lo cual se obtiene una relación de dependencia
lineal entre el voltaje de control Ve y la relación de
trabajo 5, que consideraremos como variable de salida.
Haciendo referencia a la ecuación de una recta, se obtiene:
61
Ve
Fig. 2.03 Relación de linealidad entre el voltaje decontrol Ve y la relación de trabajo 8.
JKT. Vc -c 1
KVcl
(99)
(100)
8 = 1 - Vcva (101)
2.3.5 MODELO GENERAL DEL SISTEMA.
El modelo del sistema en el cuadrante I, propone el
siguiente diagrama de bloques:
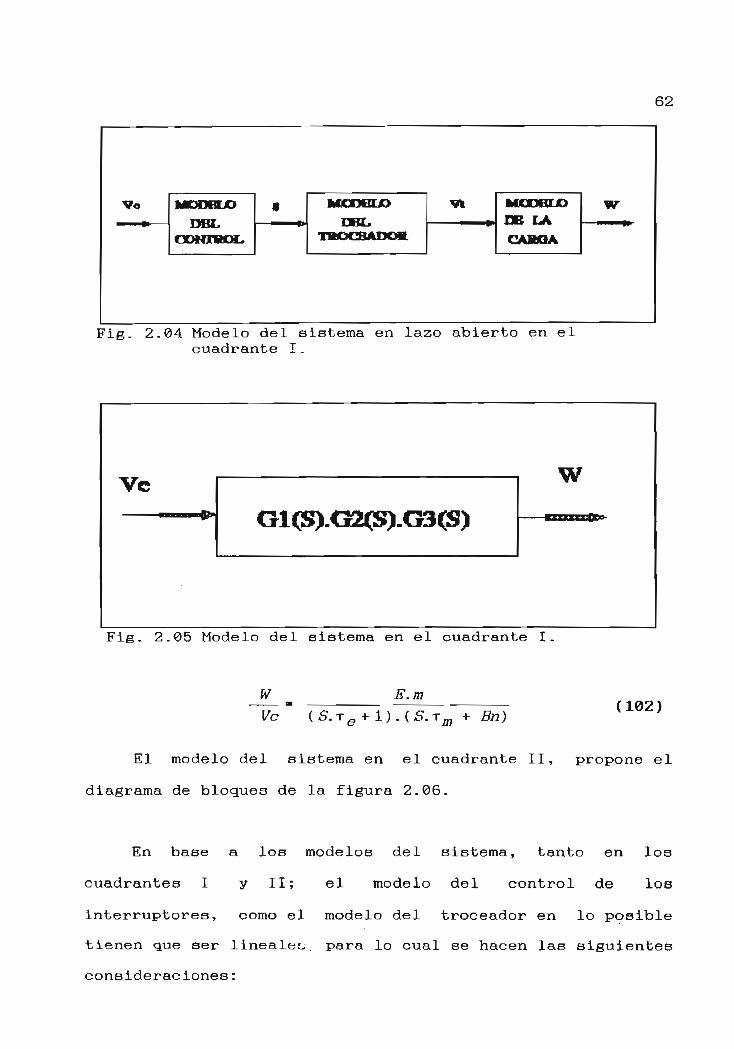
62
v« MDDBLODKL
oramos
* MCOGLOmu,
TODCBADQR
VI MDGDBUOOS LA
CAHOA
W
Fig, 2.04 Modelo del sistema en lazo abierto en elcuadrante I.
Ve W
Fig. 2.05 Modelo del sistema en el cuadrante I.
E.m
Ve 4- Bn)(102)
El modelo del sistema en el cuadrante II, propone el
diagrama de bloques de la figura 2.06.
En base a los modelos del sistema, tanto en los
cuadrantes I y II; el modelo del control de los
interruptores, como el modelo del troceador en lo posible
tienen que ser lineales, para lo cual se hacen las siguientes
consideraciones:
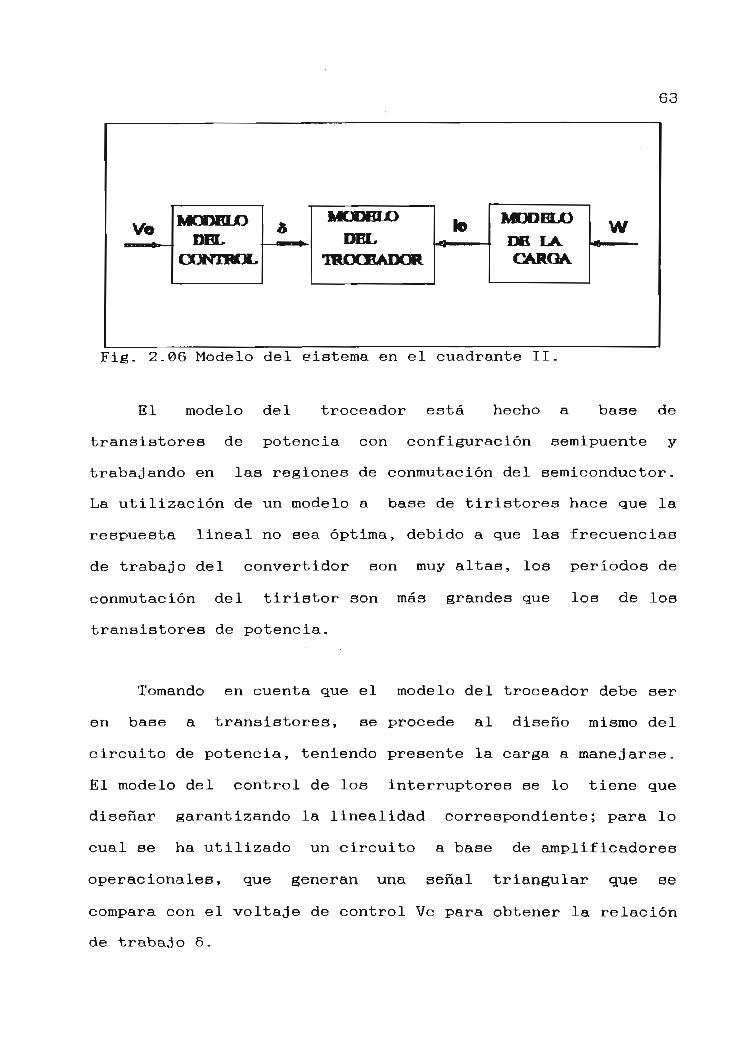
63
MODELODEL
CONTROL
MOOBLODEL
TOOOELADGR
lo MODELODB IXCARGA,
w
Fig. 2.06 Modelo del eistema en el cuadrante II.
El modelo del troceador está hecho a base de
transistores de potencia con configuración semipuente y
trabajando en las regiones de conmutación del semiconductor.
La utilización de un modelo a base de tiristores hace que la
respuesta lineal no sea óptima, debido a que las frecuencias
de trabajo del convertidor son muy altas, los períodos de
conmutación del tiristor son más grandes que los de los
transistores de potencia.
Tomando en cuenta que el modelo del troceador debe ser
en base a transistores, se procede al diseño mismo del
circuito de potencia, teniendo presente la carga a manejarse.
El modelo del control de los interruptores se lo tiene que
diseñar garantizando la linealidad correspondiente; para lo
cual se ha utilizado un circuito a base de amplificadores
operacionales, que generan una señal triangular que se
compara con el voltaje de control Ve para obtener la relación
de trabajo 6.
64
2.4 DISEHO DEL SISTEMA.
2.4.1 DISEftO DEL CIRCUITO DE POTENCIA.
La parte de potencia del sistema únicamente lo va a
constituir el diseño de los interruptores y diodos de poder
así como de la inductancia de filtrado, a través de los
cuales va a circular la corriente de carga en algún instante
en la operación del troceador.
El circuito de potencia se lo va a diseñar de acuerdo a
las características de la carga que se va a manejar.
El motor DC que constituye la carga del sistema está
disponible en el Laboratorio de Electrónica de Potencia, con
los siguientes datos.
P = 1 H.P.
larm.N = 7 A.
Varm.N = 180 VDC.
Considerando la potencia, frecuencia de operación y la
técnica de conmutación, se escogieron transistores de
potencia tipo darlington como interruptores del troceador.
El darlington de potencia, se lo dimensiona para dos
veces la corriente nominal del motor, es decir, para una
corriente semejante a los 15A.
El voltaje colector - emisor máximo del darlington debe ser
mayor que el voltaje de armadura nominal del motor, es decir:
Vcemáx > Varm.N
65
Otro parámetro de consideración en la elección del
transistor son sus tiempos de conmutación, especialmente el
de tiempo de apagado del dispositivo ya que de él dependen en
muy buena parte las pérdidas dinámicas del semiconductor.
Dichas pérdidas son muy elevadas con tiempos de apagado
altos. El tiempo de apagado del dispositivo debe escogerse de
acuerdo a la máxima frecuencia de trabajo de los
transistores.
Con estos parámetros se elije el darlington de potencia
ECG2317 que tiene las siguientes especificaciones:
PD = 150W.
Ic = 15A.
tf = 0.5 us. typ.
Vces = 500V.
Vceo = 450V.
Vebo = 5V.
hfe = 300 mín.
Con estos datos se puede obtener la máxima corriente en
la base que se debe inyectar al transistor:
IBmáx = ICmáx/hfe = 15 A/300 = 50 mA.
66
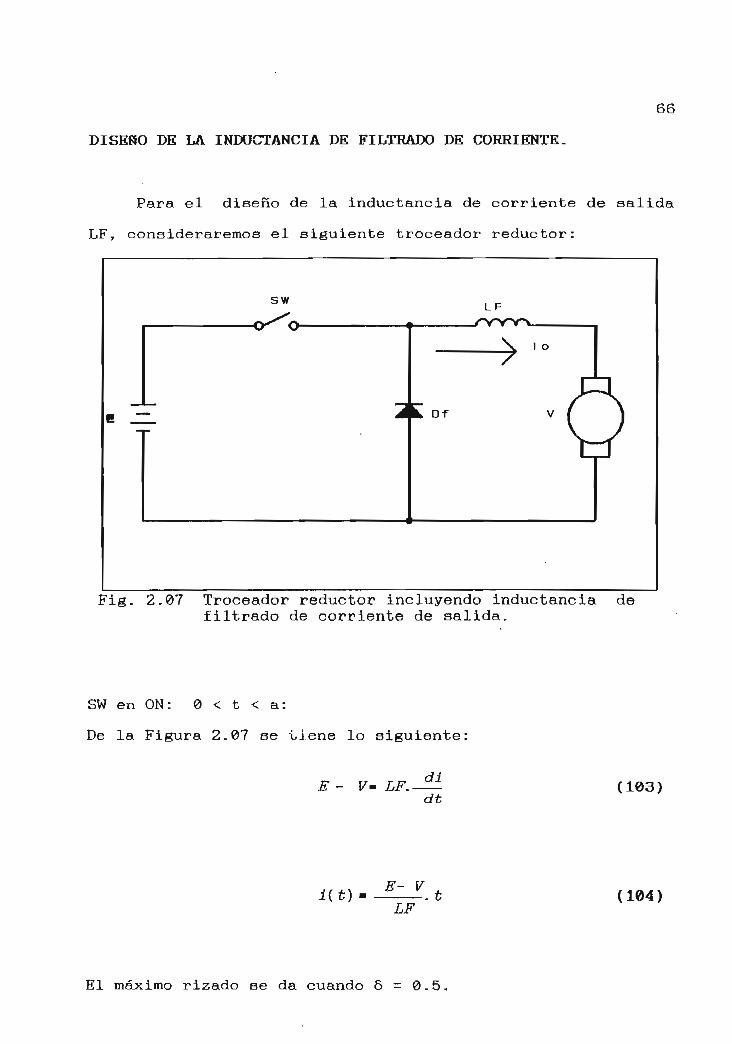
DISEHO DE LA INDUCTANCIA DE FILTRADO DE CORRIENTE.
Para el diseño de la inductancia de corriente de salida
LF, consideraremos el siguiente troceador reductor:
e
Fig. 2.07 Troceador reductor incluyendo inductancia defiltrado de corriente de salida.
SW en ON: 0 < t < a:
De la Figura 2.07 Be -Llene lo siguiente:
E - V- LF.dt
(103)
i ( t )E- V± - 1.
LF(104)
El máximo rizado se da cuando 6 = 0.5.

67
5.a - 2. Jo (105)
Considerando para este caso que:
Tcha
2 2 . íc/i
Se logra obtener el rango para la inductancia LF:
LF > (107 )Q.fch, lo
El peor de los casos sería trabajar con una frecuencia
de operación baja. Hacemos fch = 100 Hz, con lo cual se
obtiene:
LF> 2G.7BmH (10B)
El valor seleccionado de inductancia de filtrado es:
LF « 60/ntf (109)
Se procede ahora al diseño mismo de la inductancia LF,
con el conocimiento de cirtos parámetros adicionales como
son: lo = 7A; V = 150 VDC; Po = 1050W y a = regulación = 1%.
Ke -0.145. Po.Bdc 2.10~4
68
Ke- 0.145 * 1050* (1.2)2 * 10" 4 = 0 . 021924
2Energía - L.
Ke . a
U.47)2 98.67
1.2* 0.48 *259
Se procede a determinar el calibre del conductor:
(113)
0.02192 * 1
Se dispone del núcleo E - I 175 7 donde Kg = 75.9
Ap * tf¿;* Ao -14.8 * 17.5 »259cjw 4 (115)
La densidad de corriente J está dada por:
47 2 * Energía * 10 (116)
Em * Au * Ap
Donde: Bm - 1.2 tesla
Ku = 0.48 para núcleo laminado.
J«

69
0.0353cm 2 (118)J 198
AWG12 - 0. 03308 cm 2 (119)
El área de la ventana efectiva se la considera un 75% de Wa.
% * Wa - 0.75 * 14.8 - ll.lc/n2 (120)
La sección del conductor calibre # 12 con aislamiento es:
Awi - 0. 03564 cm 2 (121)
Se calcula el número de vueltas N con la siguiente expresión
S2(122)
Awi
Donde S2 es un factor de seguridad, para nuestro caso S2 =
0.6.
1 * 0 • 6 186. 86 vueltas (123)0.03564
El entrehierro respectivo está dado por:
ls „ 0-4 * Tt*// *¿c * 10" (124)
JÜ
(186)2*17.5* 10" 8 ft ._«0.12C773
0.06
70
Para recalcular el número de vueltas N, existe el factor F:
~ , lg , 2 * (7• (126)
F- 1. 13 ( 127 )
Ig * LF
0.4 * TC * .Ac * F* 10"8
(128)
(129)
En base del número de vueltas de conductor calibre # 12,
se puede conocer las libras que se requieren.
Una vez construida la inductancia con el núcleo
disponible, número de vueltas y entrehierro calculado, se
procede a su respectiva medición, para lo cual se realiza dos
pruebas la una en AC y la otra en DC.
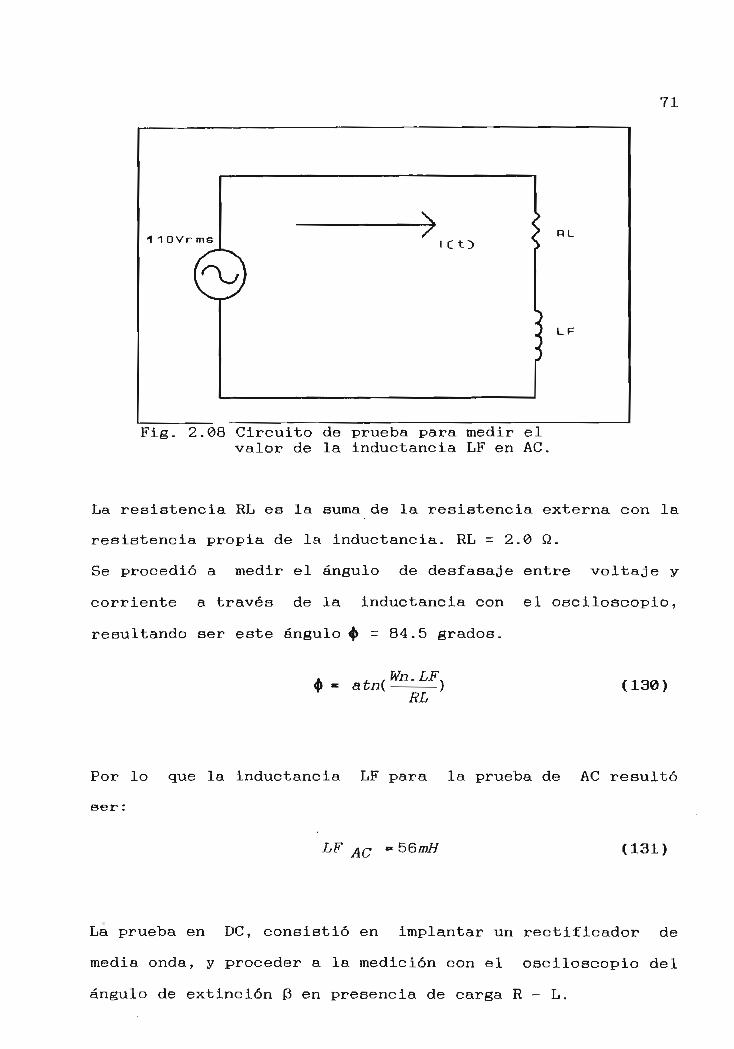
La prueba en /VC, consistió en armar el siguiente
circuito de la Figura 2.08,
71
•1 1 OVr ms RL
\O
LF
Fig. 2.08 Circuito de prueba para medir elvalor de la inductancia LF en AC.
La resistencia RL es la suma de la resistencia externa con la
resistencia propia de la inductancia. RL = 2.0 Q.
Se procedió a medir el ángulo de desfasaje entre voltaje y
corriente a través de la inductancia con el osciloscopio,
resultando ser este ángulo 4> - 84.5 grados.
.4»
. .atn(
Wn.LF.- )
EL(130)
Por lo que la inductancia LF para la prueba de AC resultó
ser
AC (131)
La prueba en DC, consistió en implantar un rectificador de
media onda, y proceder a la medición con el osciloscopio del
ángulo de extinción 0 en presencia de carga R - L.
1 1 O V r ms RL
LF
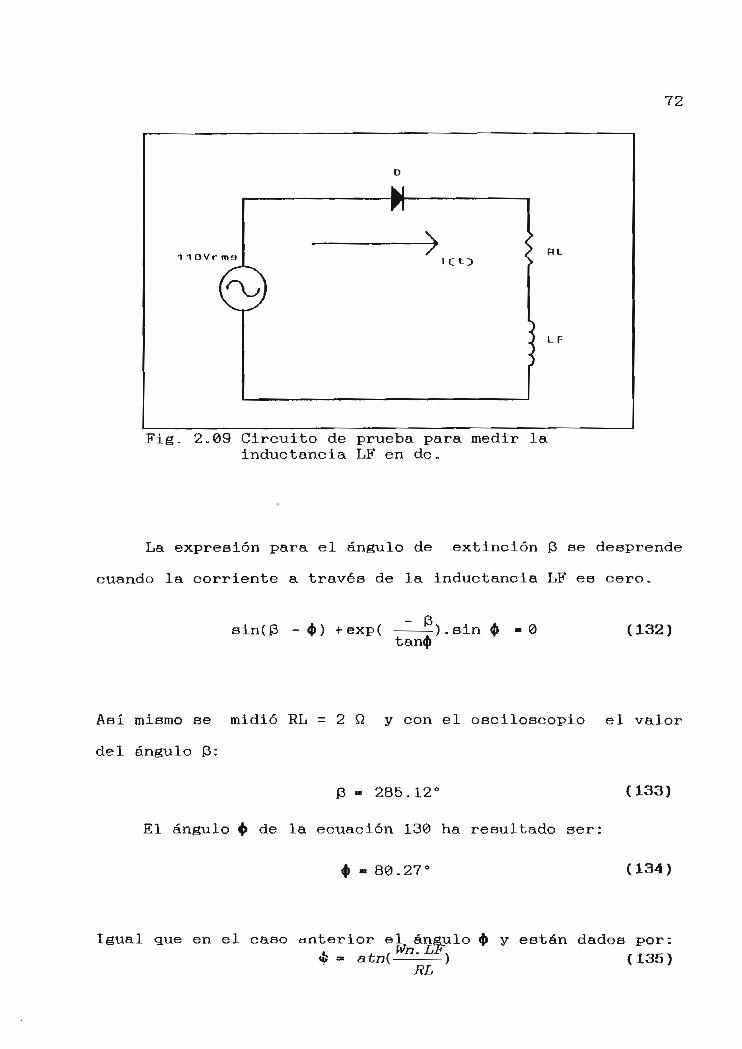
72
Fig. 2.09 Circuito de prueba para medir lainductancia LF en de.
La expresión para el ángulo de extinción 0 se desprende
cuando la corriente a través de la inductancia LF es cero.
sin(í3 - 4») ~ — ~tanífr
. sin <fr » 0 (132)
Asi mismo se midió RL = 2 Q y con el osciloscopio el valor
del ángulo 0:
13 « 285.12° (133)
El ángulo 4» de la ecuación 130 ha resultado ser:
4» « 80.27' (134)
Igual que en el caso anterior el ángulo ó y están dados por:wn. LF
& m atn( ) (135)RL
73
De estas ecuaciones resulta que el valor de la inductancia LF
para la prueba de DC. es:
LF DC = 30.93/ntf (136)
Se han obtenido los valores para la inductancia LF mediante
las dos pruebas de AC y de DC, resultando que el valor de LF
en AC es mayor que el valor de LF en DC, lo cual es
explicable en razón de que la inductancia se satura más
rápidamente en presencia de DC.
2.4,2 DISERO DE LOS MENEJADORES DE BASE PARA LOS
TRANSISTORES DE POTENCIA.
El diseño de los manejadores de base para circuitos con
transistores de potencia son considerablemente más
complicados para operaciones en condiciones más severas.
Primero el bajo hfe para transistores de potencia significa
que sus corrientes de base son grandes, algunas veces en las
que no pueden manejar directamente al transistor de potencia.
Un estado de ganancia intermedia hacen a los transistores de
potencia necesitar de una capacidad de corriente que debe ser
abastecida por el manejador de base. Esto significa que la
potencia de disipación en el circuito no debe ser considerada
como disipación de potencia en el transistor principal.
Segundo hay que considerar una corriente de base
negativa que se debe -jsar en el apagado del transistor de
74
potencia, porque de otro caso, el tiempo de apagado seria muy
grande y por consiguiente una potencia de disipación muy
grande en el instante del apagado. Tercero, algunas veces es
necesario poner transistores de potencia para incrementar la
capacidad de corriente total del manejador de base. El diseño
del manejador de base debe tener una buena conflabilidad, de
lo contrario sobrevoltajes y oscilaciones podrían ocurrir a
través del transistor de potencia.
El emisor del transistor debe ser considerado como punto
de referencia de voltaje para el correspondiente circuito
manejador de base.
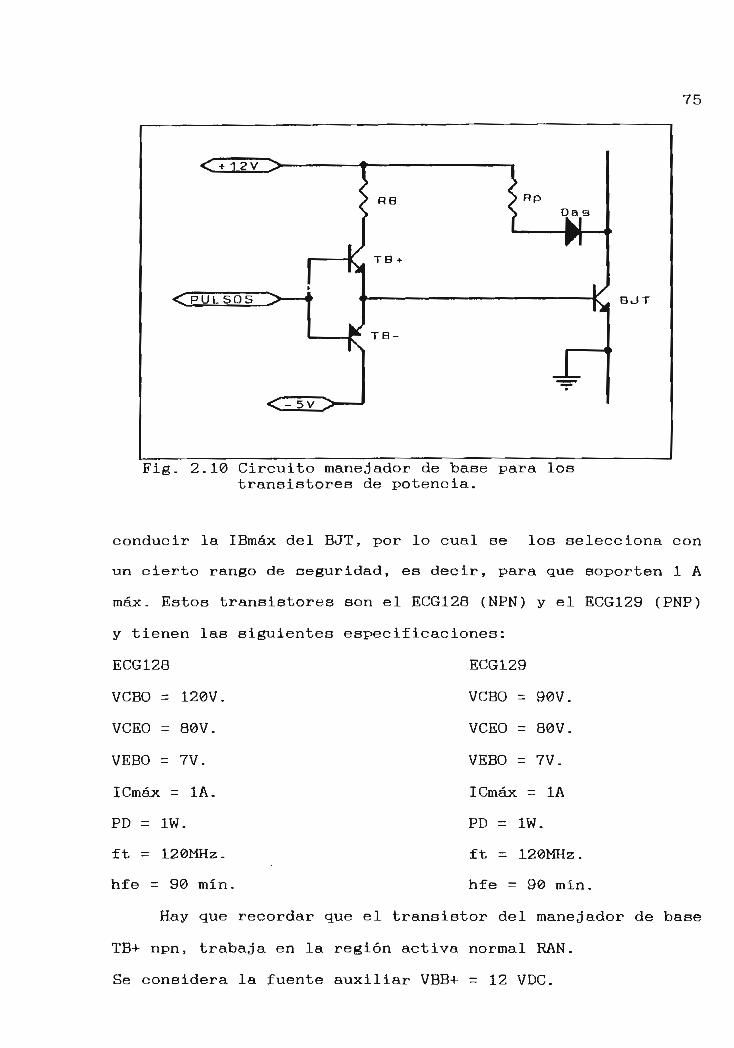
La fuente auxiliar necesaria para el manejador de base debe
estar aislado a través de un transformador. Se propone el
siguiente circuito manejador de base de la Figura 2.10 para
el manejo de los transistores darlington de potencia:
En lo que se refiere al diodo de antisaturación Das,
éste debe ser capaz de conducir la IBmáx por lo menos, y
debe tener un tiempo de recuperación reversa menor que el
tiempo de almacenamiento del BJT, por lo cual se lo ha
seleccionado el diodo ECG5B7 con las siguientes
características:
Trr = 35 ns máx - tiempo de recuperación reversa.
PRV = 200V. ~ voltaje reverso pico.
lo = 1 A.
Los transistores TB+ y TB~ también deben ser capaces de
75
BJT
Fig. 2.10 Circuito manejador de base para lostransistores de potencia.
conducir la IBmáx del BJT, por lo cual se los selecciona con
un cierto rango de seguridad, es decir, para que soporten 1 A
máx. Estos transistores son el ECG128 (NPN) y el ECG129 (PNP)
y tienen las siguientes especificaciones:
ECG128 ECG129
VCBO = 120V. VCBO = 90V.
VCEO = 80V. VCEO = 80V.
VEBO = 7V. VEBO = 7V.
ICmáx ~ 1A. ICmáx ~ 1A
PD = 1W. PD = 1W.
ft = 120MH2. ft = 120MHz.
hfe = 90 mín. hfe - 90 mín.
Hay que recordar que el transistor del manejador de base
TB+ npn, trabaja en la región activa normal RAN.
Se considera la fuente auxiliar VBB+ = 12 VDC.
76
VBB + - Ic(TB+}.RB + VCS(TB+) + VB(on} (137)
Para condiciones de operación se considera Ic = 0.3 A.
Entonces: RB = (12 - 2 - l)V./0-3A = 30 Q.
PRB - (0.3)~2*30 = 2.7W.
La resistencia RB seleccionada es de 33 Q y de 10W, por
seguridad.
Para el dimensionamiento de Rp:
VBB 4- m Ip.Rp + VDas + V Q¿(on) (138)
Se considera Ip = 0. 3A.
Entonces: Rp = ( 12 - 1 - 0.6)V./0.3A. = 34.67 Q.
PRp = (0.3) 2*34.67 = 3.12W.
La resistencia Rp seleccionada es de 39 Q y de 10W.
La fuente auxiliar VBB- es de - 5VDC y sirve para el apagado
más rápido del transistor.
El diodo de antisaturación Das sirve para mantener el voltaje
VCE del transistor principal ligeramente por encima del valor
de saturación. Este debe ser un diodo de recuperación rápida
con tiempo de recuperación reversa más pequeño que el tiempo
de almacenamiento del BJT.

77
2.4.3 DISERO DE LOS StíUBBERS.
Los snubbers para transistores convencionales y
darlington de potencia, son circuitos utilizados para
proteger al transistor durante las conmutaciones que se
producen. Existen básicamente tres tipos de snubbers:
Snubber de apagado.
- Snubber de encendido.
- Snubber de sobrevoltaje .
Para explicar la necesidad de los snubbers se puede
decir, que durante la conmutación de apagado en un
convertidor reductor por ejemplo sin snubbers, el voltaje
colector - emisor del transistor comienza a crecer pero la
corriente permanece igual durante un cierto tiempo hasta
cuando el diodo de conmutación comienza a conducir, entonces
la corriente en el transistor comienza a decrecer y la
velocidad de decrecimiento es dictaminada por la propiedad
del transistor y del manejador de base. El voltaje en el
transistor puede ser expresado como:
VCE - Vd-L a . (139)
Donde La = Ll 4- L2 + . . . , que significan la presencia de las
inductancias parásitas, que resultan en un sobrevoltaje.
Durante el encendido del transistor la corriente
comienza a crecer a una velocidad que depende de las
propiedades del transistor y del manejador de base.

78
2.4-3.1 SNUBBER DE APAGADO.
Para evitar problemas en el apagado, este snubber provee
de voltaje cero a través del transistor mientras la corriente
se extingue. Este snubber lo constituye una red R - C - D a
través del transistor como muestra la Figura 2.11.
Cs
Fig. 2.11 Esquema circuital de un snubber de apagadocon coversor reductor.
Previo al apagado, la corriente en el transistor es lo y
el voltaje es escencialmente cero. En el apagado, la
presencia del snubber hace que la corriente del transistor se
reduzca como una constante di/dt y (lo - ic) fluye en el
capacitor a través del diodo del snubber Ds. Existe una caída
de corriente en un tiempo tf. La corriente del capacitor
puede ser escrita como:
79
Esto es válido para: 0 < t < tfi
Donde ic« es cero antes del apagado. El voltaje del capacitor
es el mismo a través del transistor.
ff.*j 0
Lo cual es válido durante el tiempo de caida de la corriente .
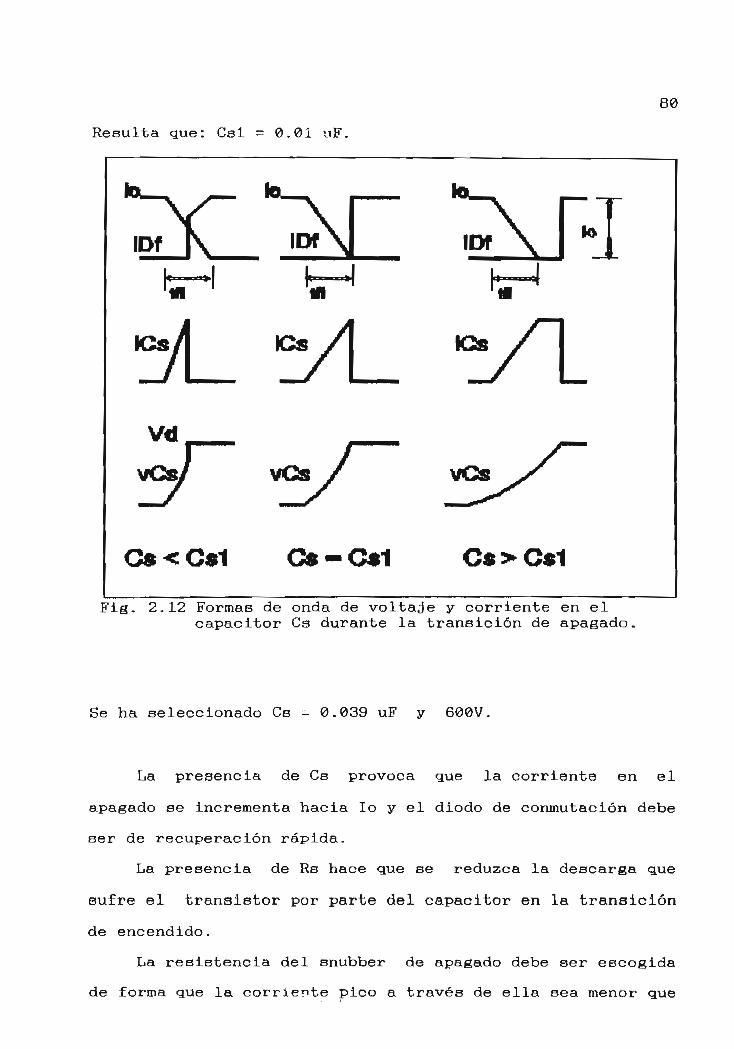
Las formas de onda de voltaje y corriente se muestran en la
Figura 2.12, para tres valores de capacitor de snubber Cs.
Para valores pequeños de capacitor, el voltaje del capacitor
alcanza Vd antes de yue la caida de corriente termine .
Para el valor de capacitor Cs = Csl, provoca que el voltaje
del capacitor alcance E exactamente cuando la caida de
corriente ha terminado; Csl puede ser calculado por
substitución de t = tfi y VCs = Vd? por lo tanto, tenemos:
3l - ~ (142)lJ-
Para el caso del diseño, se tiene:
lo = 7 A.
tfi = 0.5 us.
Vd = 180 VDC.
80
Resulta que: Csl = 0.01 uF.
IDT
rt
C*<C*1
vCs
C«
Fig. 2.12 Formas de onda de voltaje y corriente en elcapacitor Cs durante la transición de apagado.
Se ha seleccionado Cs - 0.039 uF y 600V.
La presencia de Cs provoca que la corriente en el
apagado se incrementa hacia lo y el diodo de conmutación debe
ser de recuperación rápida.
La presencia de Rs hace que se reduzca la descarga que
sufre el transistor por parte del capacitor en la transición
de encendido.
La resistencia del snubber de apagado debe ser escogida
de forma que la corriente pico a través de ella sea menor que
81
la corriente de recuperación reversa del diodo de
conmutación; así:
< Irr (143)Rs
Generalmente Irr = 20% lo o menos, por tanto, la expresión
anterior queda así:
E « 0.2* Jo (144)
Por lo tanto: Rs = IBÜtf./(0.2*7)A. = 128.57 fí.
La corriente de carga lo va a circular durante el tiempo
de crecimiento de la corriente tr - 0.5 us. que constituye un
pequeño porcentaje del periodo total (en el peor de los casos
a máxima frecuencia) ~ 2.5KHz. Este porcentaje representa el
1% máximo, lo cual indica que la corriente media a través de
Rs es del 1% de la corriente de carga lo.
PRs - IRs"2*Rs = (0.01*7r2*128.57 = 0.63 W.
Con estos datos se ha seleccionado la resistencia Rs -
150 Q y PRs = 5W.
Algunas ventajas podrían mencionarse al respecto del
snubber de apagado durante la transición de encendido del
transistor:
Toda la energía del capacitor es disipada en el resistor
Rs.
No ocurre disipación de energía adicional en el
82
transistor debido al snubber de apagado.
La corriente pico que el transistor debe conducir no es
incrementada debido al snubber de apagado.
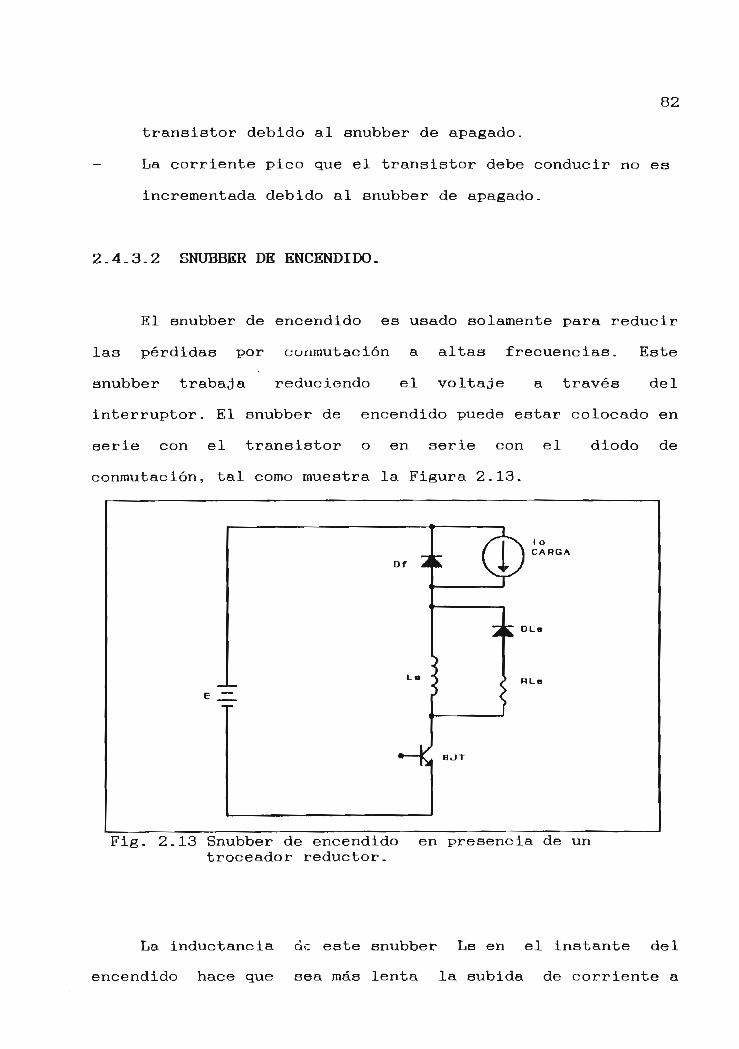
2.4.3.2 SNUBBER DE ENCENDIDO.
El snubber de encendido es usado solamente para reducir
las pérdidas por conmutación a altas frecuencias. Este
snubber trabaja reduciendo el voltaje a través del
interruptor. El snubber de encendido puede estar colocado en
serie con el transistor o en serie con el diodo de
conmutación, tal como muestra la Figura 2.13.
or
I oC A RGA
DLa
Le
BJT
Fig. 2.13 Snubber de encendido en presencia de untroceador reductor.
La inductancia ác este snubber Ls en el instante del
encendido hace que sea más lenta la subida de corriente a

83
través de los transistores de potencia
La reducción de voltaje a través del transistor se debe
a la caida de tensión a través de Ls, esta reducción está
dada por la ecuación 143.
. r . ._ .CE ra - — (145)
tri
donde: tri es el tiempo de crecimiento de la corriente, como
se muestra en la Figura 2,14, donde para pequeños valores de
Ls, di/dt es determinado solo por las características del
transistor y el circuito manejador de base, de forma igual
que sin snubber de encendido. La corriente pico de
recuperación reversa en el diodo es también la misma que sin
snubber de encendido.
Para reducir la corriente pico de recuperción reversa en
el diodo hay que poner un valor de Ls más grande, como
muestra la Figura 2.14. En este caso el di/dt es controlado
por Ls y el voltaje a través del transistor es casi cero
durante el tiempo de crecimiento de la corriente.
Durante el estado de encendido del transistor, Ls
conduce la corriente de carga lo. Cuando el transistor se
apaga, la energía es almacenada en el inductor del snubber, y
está dada por:
T 210 (146)

84
le
vCE
La pequeña üs grande
Fig. 2.14 Formas de onda de voltaje y corriente en eltransistor para valores de Ls grande y pequeño,
Esta energía será disipada en el resistor del snubber
RLs. La constante de tiempo del snubber es rL - Ls/RLs.
Para la selección de la resistencia RLs deben ser
considerados ciertos factores. Primero, durante el apagado
del transistor, el snubber de encendido genera un
sobrevoltaje a través del transistor y está dado por:
A VCEmax " RLs'Io (147)
Para el seleccionamiento de RLs, se ha considerado el peor de
los casos:
Vd (148)
lo = 7A.
Por lo tanto, RLs = 25,71 Q,

85
Segundo, durante el estado de apagado, la corriente en
la inductancia debe decaer a un valor bajo, por ejemplo a
0.1*Io, de modo que el snubber puede ser efectivo durante el
próximo encendido. ?or eso, el mínimo intervalo para el
estado de apagado del transistor debería ser:
* off- átate > 2 - 3 ~ (149)
Considerando el peor de los casos, es decir, a máxima
frecuencia = 2.5KHz y máxima relación de trabajo 6 = 0.9.
t off-state = (1-0-9) * 0-5 ¿?£r=0.05 ms. (150)
Entonces: 0.05 ms > 2.3* Ls/RLs
donde: Ls < 558 uH.
Se ha trabajado con una Ls = 30 uH. , con la cual se ha
obtenido buenos resultados prácticos. El calibre del
conductor de la bobina debe soportar la corriente de carga
lo, por lo que se utilizó el calibre ft 13 en conductor
esmaltado -
De la ecuación 157, se tiene:
ELs - 0.0006125 J.
Debido a que la energía de la inductancia Ls se descarga
sobre la resistencia RLs, podemos conocer la potencia de RLs.
1.225Tch
86
Por lo tanto, se elije PRLs = 10W.
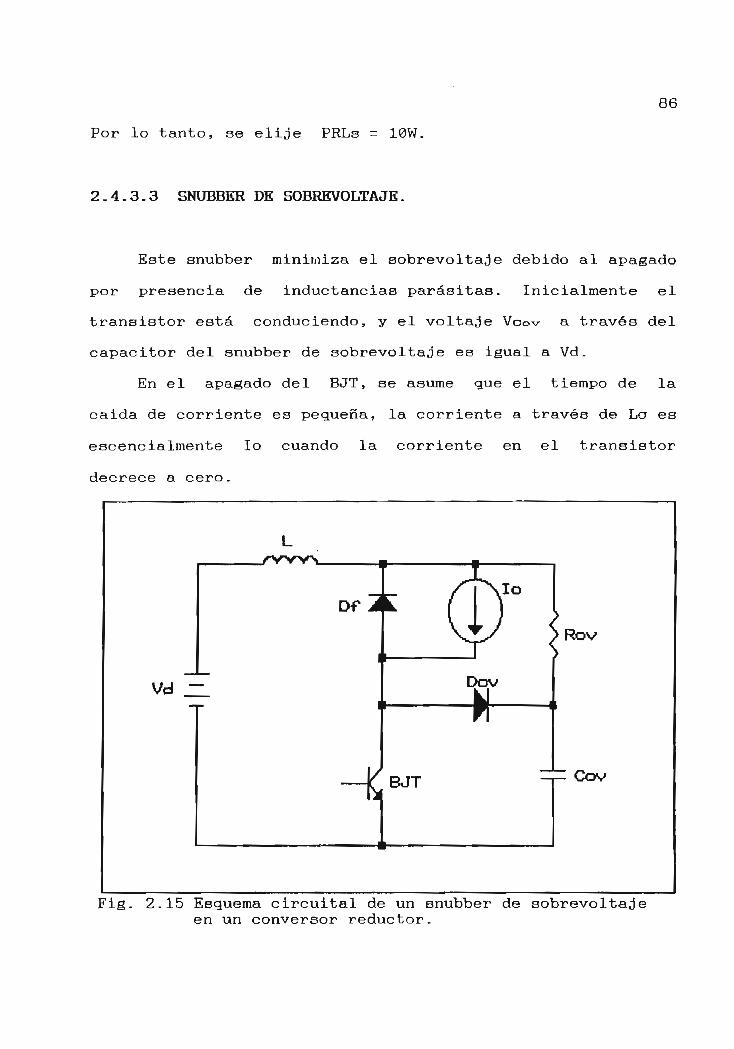
2.4.3.3 SNUBBER DE SOBREVOLTAJK.
Este snubber minimiza el sobrevoltaje debido al apagado
por presencia de inductancias parásitas. Inicialmente el
transistor está conduciendo, y el voltaje Vcov a través del
capacitor del snubber de sobrevoltaje es igual a Vd.
En el apagado del BJT, se asume que el tiempo de la
caida de corriente es pequeña, la corriente a través de Lo es
escencialmente lo cuando la corriente en el transistor
decrece a cero.
Vd
Rov
Cov
Fig. 2.15 Esquema circuital de un snubber de sobrevoltajeen un conversor reductor.
87
En un sobrevoltaje por ejemplo, la variación de voltaje
colector - emisor máximo - 0.1*E, es aceptable.
L .lo(152)
tfi
y además:
2 2OV -A vCEm&x ' L a - Io (153)
Subst ituyendo 150 en 151, se tiene:
100. k. lo. tfi 100 *0 .1 *7¿*0 . 5 us ,-.-„*OV " " (154)uv E 180 V
Por tanto: Cov = 0.19 uF.
Se ha seleccionado un condensador Cov = 2uF , 400V.
2.4.3.4 SNUBBKR'S PARA CONFIGURACIONES PUENTE.
En aplicaciones con modulación por ancho de pulso, como
modo de control de convertidores en conuraciones de medio
puente y puente completo para manejo de motores o fuentes
ininterrumpidas de poder, la corriente de carga puede ser
tratada como constante lo, por ciclo de conmutación.
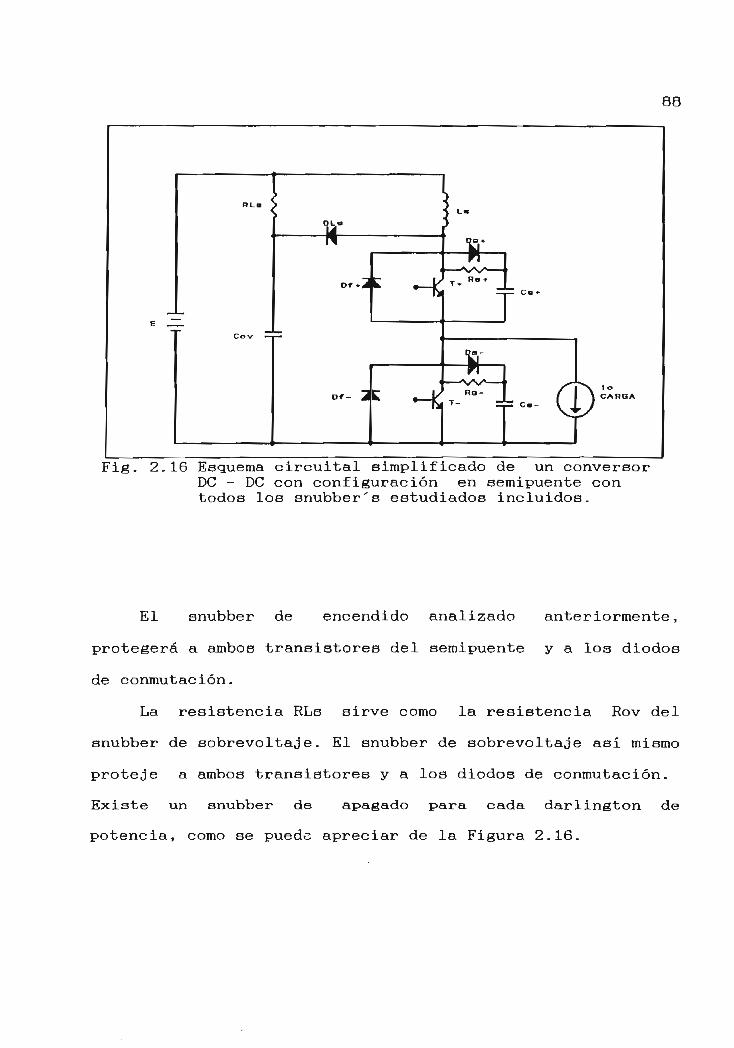
La Figura 2.16 representa un circuito simplificado en
donde se incluyen todos los snubber's estudiados en presencia
de un convertidor DC - DC en una configuración de medio
puente.
88
<
*~~Kj T
loCARGA
Fig. 2.16 Esquema circuital simplificado de un conversorDC - DC con configuración en semipuente contodos los snubber's estudiados incluidos.
El snubber de encendido analizado anteriormente,
protegerá a ambos transistores del semipuente y a los diodos
de conmutación.
La resistencia RLs sirve como la resistencia Rov del
snubber de sobrevoltaje. El snubber de sobrevoltaje así mismo
proteje a ambos transistores y a los diodos de conmutación.
Existe un snubber de apagado para cada darlington de
potencia, como se puede apreciar de la Figura 2.16.
89
2.4.4 DISEHO DEL CIRCUITO DE CONTROL.
2.4.4.1 DISEHO DEL CIRCUITO DE CONTROL SIMULTANEO.
Qf-f
Df-
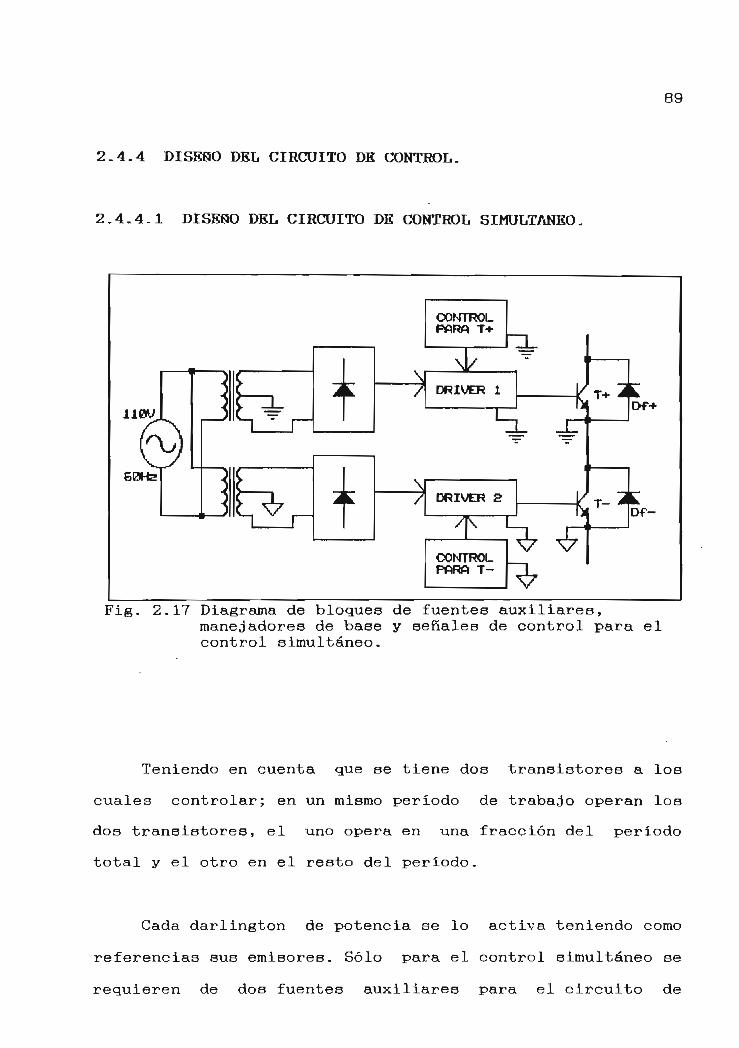
Fig. 2.17 Diagrama de bloques de fuentes auxiliares,manejadores de base y señales de control para elcontrol simultáneo.
Teniendo en cuenta que se tiene dos transistores a los
cuales controlar; en un mismo período de trabajo operan los
dos transistores, el uno opera en una fracción del período
total y el otro en el resto del período.
Cada darlington de potencia se lo activa teniendo como
referencias sus emisores. Sólo para el control simultáneo se
requieren de dos fuentes auxiliares para el circuito de

90
control que sean independientes completamente, es decir, se
requieren de dos transformadores para las dos fuentes
auxiliares del circuito de control. La Figura 2.17 muestra lo
dicho con anterioridad.
El diagrama de bloques del control simultáneo
implantado, obedece al de la Figura 2.18.
GENERACIÓNDE ONDA
TRIANGULARCOMPARADOR
NIVEL DE D.C.WRIABLE0 - 12VDC
1fCOMPARADOR
JT INVERSO*
J
DRIVERi
* TOANSISTORSUPERIOR
DE LA RAMA
J_
OPTOACOPLADQR
V V
•TOANSISTORINFERIOR
DE LA RAMA
Fig. 2.18 Diagrama de bloques general del controlsimultáneo.
- DISKSO DE LA SEfiAL TRIANGULAR.
La señal triangular generada, es de amplitud variable
entre 0 y 12VDC, así como de frecuencia variable entre 100Hz
y 2.5KHz.
Se consideran las fuentes de polarización -*-V y -V de
-Í-12VDC y de -12VDC, respectivamente.
Los diodos zener's en conexión antiparalelo son de 5.IV
y de 1/2 watt.
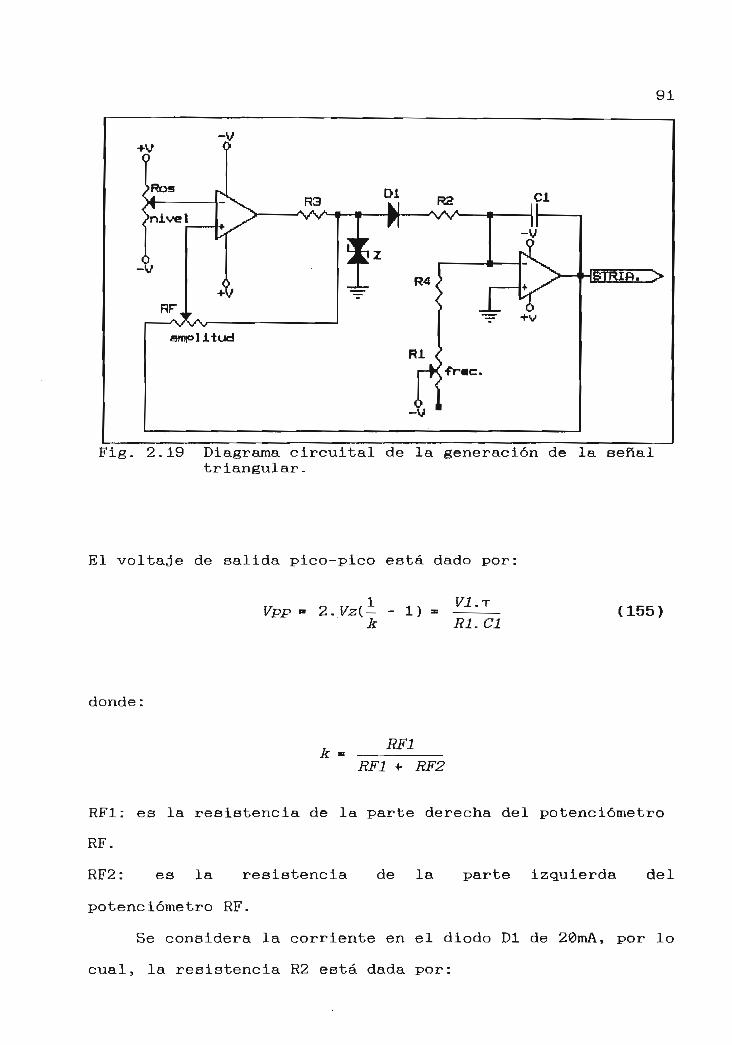
91
>Roa
RF.
R3DI
1
ALj
r¡jz
R4
Ri
STRIft. >
Fig. 2.19 Diagrama circuital de la generación de la señaltriangular.
El voltaje de salida pico-pico está dado por:
Vpp -k
V1-rR1.C1
(155)
donde:
RF1
RF1 + RF2
RF1: es la resistencia de la parte derecha del potenciómetro
RF.
RF2: es la resistencia de la parte izquierda del
potenciómetro RF.
Se considera la corriente en el diodo DI de 20mA, por lo
cual, la resistencia R2 está dada por:
92
R2- VZ-VD .J5.1-0.4) VI diodo
R2 = 235 Q.
Se ha seleccionado una resistencia R2 = 220 Q.
Para el capacitor Cl, se tiene la siguiente expresión:
V(158)
Considerando el peor de los casos, en que se tiene
mínima frecuencia = 100 Hz, Tch máx = 0.01 seg.; la carga del
capacitor se hará hasta unos 10VDC y asumiendo un valor de
capacitor de 0.01 uF y 25VDC, se logra obtener el valor de la
corriente a través de Rl.
(0'01 "F"10 V) = 6 uA. (159)
Por lo que:
V n 10 V
IR1 6 uA1.67Af.Q (160)
Se ha seleccionado un potenciómetro para variar la frecuencia
Rl = 2.2 MQ. La resistencia R4 está presente para eliminar la
zona muerta del potenciómetro Rl, en este caso R4 = 10 KQ da
buenos resultados.
Considerando que en el instante anterior a la saturación el
93
amplificador operacional, el voltaje de salida pico-pico es
de 11.5 VDC.
a.18JT 2 . fe 10 . 2
de donde K = 0.46
Asumiendo el valor RF1 - 50 KQ., obtenemos el valor del
potenciómetro RF.
R0 ff" Q+ RF2) - — A.M 108 Q (162)
0.46
Asi se ha seleccionado un potenciómetro RF de amplitud de
100K.
Con un valor de potenciómetro de Ros = 10K, el cual
proporciona el nivel de la señal triangular, y se obtiene
buenos resultados.
Se selecciona el amplificador operacional LM318, con una
corriente de salida de unos 20mA, para un valor de fuente de
polarización de 12VDC. Este es un operacional de un gran
slew-rate - 70 V/us, es decir, que es lo suficientemente
rápido en las conmutaciones considerando las frecuencias de
trabajo mencionadas.
Por lo cual, la resistencia R3 está dada por:
,.,_ Vsal max - Vz 11.5 F - 5.1 F n ,100*E3 » —-— » —— —-— » 320 Q (163)Isal 2®mA
Para la resistencia R2, se tiene:
94
(5.1-20 mA 20 mA
Q
En este caso se ha escogido una R2 ~ 150 Q.
- DISKRO DEL CIRCUITO BLANKING TIME.
En configuraciones puente o semipuente, existen dos
transistores que están conectados en serie en una rama del
convertidor; es importante proveer de un "blanking - time", o
zona muerta para que la entrada de control que activa a un
transistor tenga una duración respecto de la entrada de
control de apagado del otro transistor. Con esto se asegura
verdaderamente que los dos transistores nunca van a estar
activados en un mismo instante.
El "blanking - time", debe ser escogido conservadoramente
teniendo en cuenta cual es la frecuencia máxima de trabajo,
lo cual constituye el peor de los casos,
Esta zona muerta introduce una no - linealidad indeseada
en la característica de transferencia del convertidor. Esta
zona muerta puede ser minimizada por el uso de diodos de
antisaturación que reducen el tiempo de almacenamiento como
la variación del tiempo de almacenamiento del BJT.
El circuito blanking - time, esté constituido por una red
H - C y un Schmitt trigger, introduciendo una duración de
tiempo significativa en el encendido del BJT. Su esquema se
representa en la Figura 2.20.
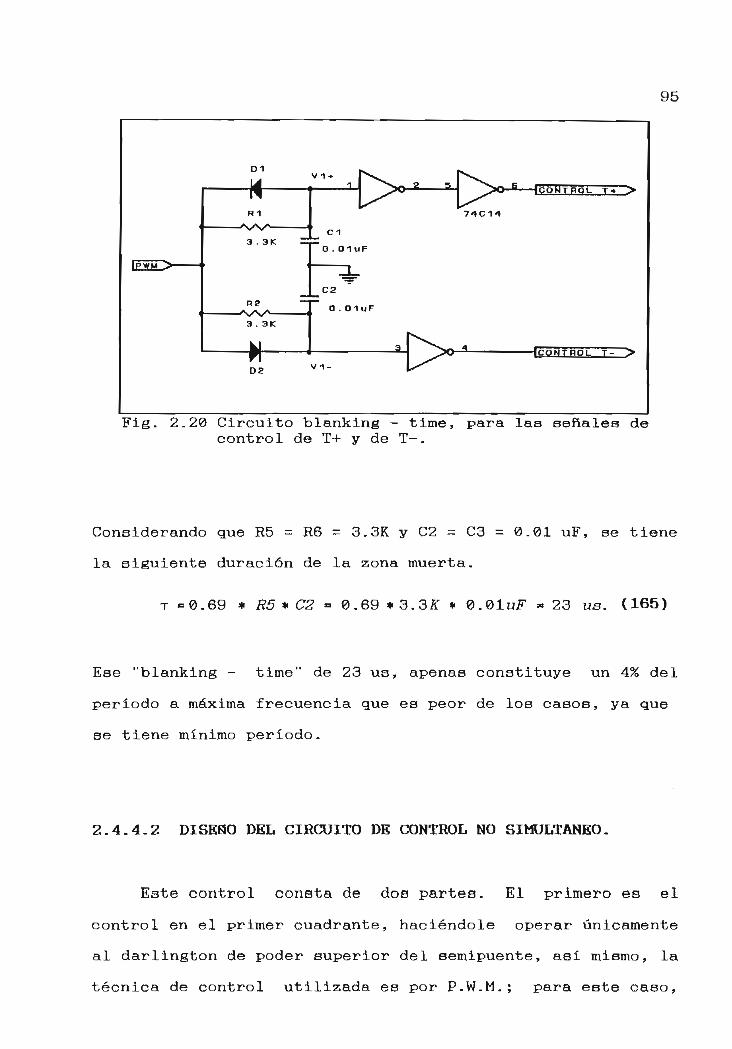
95
DI
ICONTROL T* >
-ICONTRDL T- >
Fig. 2.20 Circuito blanking - time, para las señales decontrol de T+ y de T-.
Considerando que R5 = R6 = 3.3K y C2 - C3 = 0.01 uF, se tiene
la siguiente duración de la zona muerta.
r «0.69 * R5 * C2 = 0.69 * 3.3Ar * 0.0 luí* - 23 us. (165)
Ese "blanking - time" de 23 us, apenas constituye un 4% del
período a máxima frecuencia que es peor de los casos, ya que
se tiene mínimo periodo.
2.4.4.2 DISKRO DEL CIRCUITO DE CONTROL NO SIMULTANEO.
Este control consta de dos partee. El primero es el
control en el primer cuadrante, haciéndole operar únicamente
al darlington de poder superior del semipuente, así mismo, la
técnica de control utilizada es por P.W.M.; para este caso,

96
Vfaontr.
VlHh
lo
VbT-
I btanMankinQ-tlm»
znnamuwta
Fig. 2.21 Formas de onda de voltaje de control, V1+,V1-,VcT+ y VcT-.
ya no se tiene el circuito generador de "blanking - time" que
utilizábamos para el control simultáneo, ya que la señal de
control activa únicamente a un transistor, el T-K El segundo
lo constituye el control en el segundo cuadrante, llamado
también control de rizado o freno regenerativo, donde se hace
operar únicamente al transistor de la parte inferior del
semipuente dependiendo de los valores de corriente máxima y
mínima que se hayan calibrado en el circuito de control; para
este caso se requiere necesariamente que la carga sea activa.
Cuando no se ha alcanzado el valor de Imáx en la
máquina, el transistor de poder T- se halla aun activado,
teniéndose sobre la carga un voltaje de 0V, aquí la corriente
se encierra en la malla formada por el transistor T- y el
generador. Cuando el valor de corriente de la máquina alcance
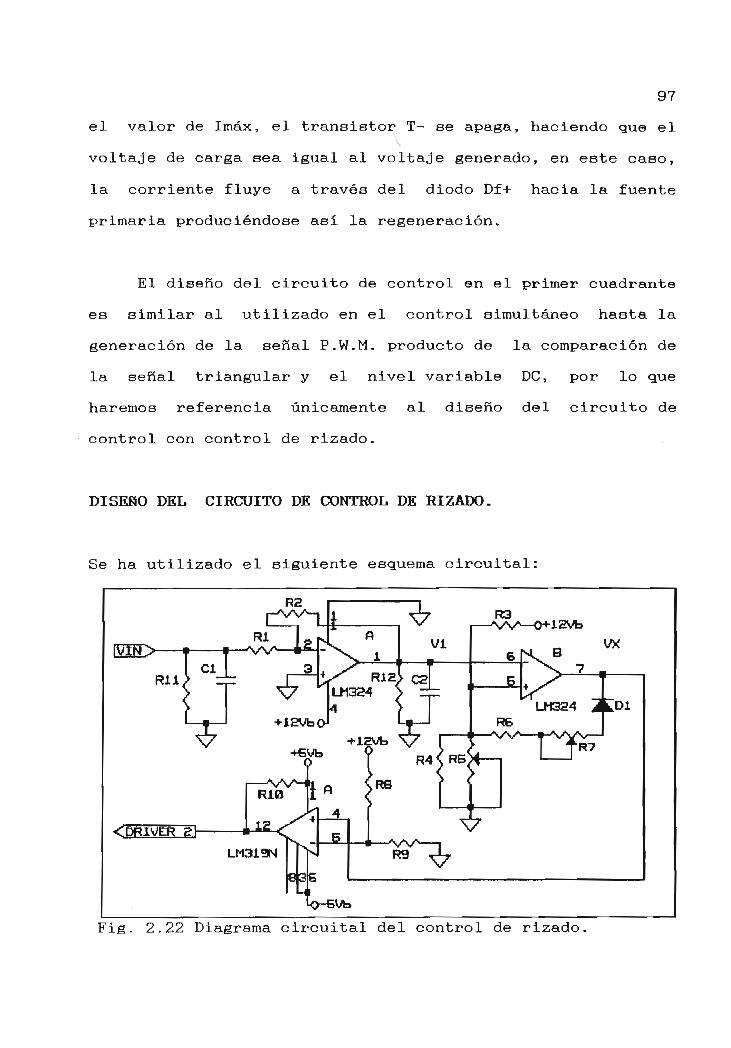
97
el valor de Imáx, el transistor T- se apaga, haciendo que el
voltaje de carga sea igual al voltaje generado, en este caso,
la corriente fluye a través del diodo DJE+ hacia la fuente
primaria produciéndose asi la regeneración.
El diseño del circuito de control en el primer cuadrante
es similar al utilizado en el control simultáneo hasta la
generación de la señal P.W.M. producto de la comparación de
la señal triangular y el nivel variable DC, por lo que
haremos referencia únicamente al diseño del circuito de
control con control de rizado.
DISEKO DEL CIRCUITO DE CONTROL DE RIZADO.
Se ha utilizado el siguiente esquema circuital:
Fig. 2.22 Diagrama circuital del control de rizado.

98
El.
0.15 otvn! IUIFT>
Fig. 2.23 Esquema circuital que indica endonde debe tomarse la señal VIN,
La agrupación de Rll, Cl y de R12, C2 ; constituyen los
filtros de entrada y salida del amplificador A, y sirven para
tomar una muestra de corriente en la máquina lo más limpia
posible y transferirla de A a B sin presencia de ruido. El
amplificador A está conectado como amplificador de ganancia -
R2/R1 y es para amplificar la muestra de corriente de forma
que la comparación posterior se realice sin dificultad.
Para nuestro caso, hacemos: R2/R1 = 10, con lo cual la
muestra de corriente inicial es amplificada adecauadamente.
Si R2 = 100 K, se tiene que Rl = 10 K.
El filtro de entrada al amplificador A, es diseñado para
eliminar señales de alta frecuencia, en este caso superior a
la frecuencia de trabajo del convertidor, es decir,
superiores a 2.5 KHz.
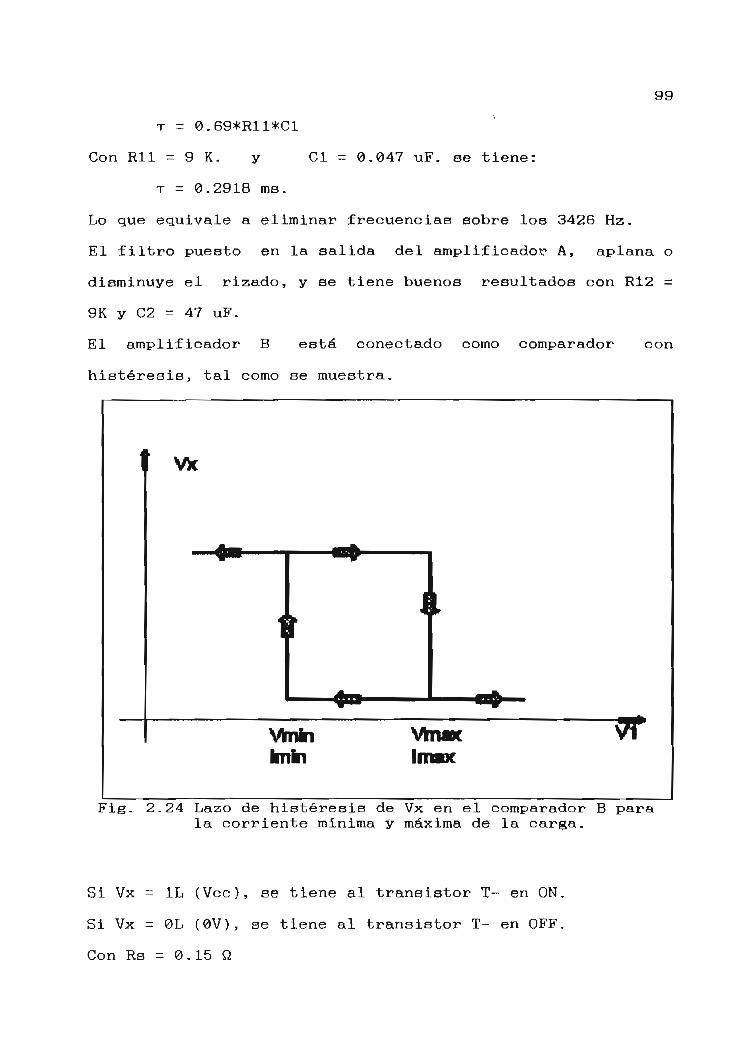
99
T = 0.69*R11*C1
Con Rll = 9 K. y Cl = 0.047 uF. se tiene:
T = 0.2918 ms.
Lo que equivale a eliminar frecuencias sobre los 3426 Hz.
El filtro puesto en la salida del amplificador A, aplana o
disminuye el rizado, y se tiene buenos resultados con R12 =
9K y C2 = 47 uF.
El amplificador B está conectado como comparador con
histéresis, tal como se muestra.
f Vk
Vhninbnki
Vknaotlirax
Fig. 2.24 Lazo de histéresis de Vx en el comparador B parala corriente minima y máxima de la carga.
Si Vx - 1L (Vcc), se tiene al transistor T- en ON.
Si Vx = 0L (0V), se tiene al transistor T- en OFF.
Con Rs = 0.15 Q

100
El máximo voltaje presente en el pin 5 del LM324 va a ser de
6V debido a las resistencias R3 y R4 que son de 10KQ, lo que
quiere decir que el voltaje antes de ser amplificado en el
instante de la conmutación es 6V/10 - 0.6V.
Lo que implica que la corriente Imáx = 0.6V/0.15Q - 4A
Cuando el voltaje Vx es 0L, el voltaje en el pin 5 del LM324
es el voltaje equivalente del divisor de tensión tomando en
cuenta que las resistencias R6 y R7 se encuentran en paralelo
con las resistencias R4 y R5 debido a que el voltaje Vx - 0V.
El voltaje en el pin 5 resulta ser de 5.4V. Por tanto, la
corriente mínima Imin = 3.6A.
La presencia del circuito integrado LM319 es únicamente
para cambiar los niveles de voltaje de los pulsos, ya que los
pulsos que salen del LM324 son de 0V a 12V de amplitud, y los
que salen del LM319N son de -5V a +5V de amplitud. Este
cambio en los niveles de voltaje sirve porque la señal
negativa de tensión apaga al transistor de poder más
rápidamente y la señal de positiva de tensión satura al
transistor. Esta señal es adecuada para que ingrese al
manejador de base correspondiente al transistor de potencia
de la parte inferior del semipuente.
2.4.5 DISEHO DE LAS PROTECCIONES.
Dentro de los circuitos que contemplan las protecciones
del equipo constan la protección de sobrecorriente a cada
darlington de potencia, protección de sobrevoltaje del
101
sistema, protección de polaridad invertida y la protección
contra la pérdida de excitación en el caso de que la carga
sea un motor DC con excitación independiente.
2.4.5.1 PROTECCIÓN CONTRA SOBRECORRIENTE.
Para el control simultáneo, se tiene que la protección de
sobrecorriente se la efectúa para cada transistor de
potencia; a través de sensar la corriente que circula por
cada darlington mediante una resistencia de 0.1Q y 25W puesta
en el emisor de cada transistor.
La Figura 2.25 indica de donde son tomadas las muestras de
corriente para cada transistor.
En el diseño mismo de la protección de sobrecorriente se
tuvieron ciertos problemas. Primero las muestras de corriente
en cada transistor no eran totalmente puras por lo que fue
necesario insertar un filtro pasábalo en la entrada del
amplificador LM348 del anexo de protección de sobrecorriente.
Dicho amplificador está conectado como amplificador de
ganancia G con inversión. Justamente al controlar la ganancia
G controlamos la referencia de corriente donde se quiere que
opere la protección. En nuestro caso, la ganancia G es:
G = 9K/820Q = 11
A la salida del amplificador de ganancia G (pin 14 del LM348)
existe un filtro que consiste en una resistencia y un
condensador conectados en paralelo, y sirve para aplanar el
rizado existente y que la señal amplificada ingrese sin

102
#
0
H5
T&
1 I <ja¿3_>
Fig. 2.25 Esquema circuital que indica donde se debentomar las muestras de sobrecorriente.
dificultad a un doble inversor Schmitt Trigger (CD40106) para
poder obtener estados lógicos definidos correspondientes a la
sobrecorriente o al estado normal de operación.
Es asi que:
Sobrecorriente...
No Sobrecorriente,
Pin 4 (CD40106)
5V.
0V.
Ahora lo que se necesita es enclavar la señal, ya que en
el caso de existir una sobrecorriente, dicho estado lógico
permanezca. Esto se logra con un SCR (ECG5400), es decir, que
en el cátodo del SCR se tiene la señal enclavada, y es Cl, la
103
cual está referida a T-K
Exactamente lo mismo se hace para el transistor inferior del
semipuente T-, y se obtiene la señal enclavada C2. La
diferencia radica en que esta señal C2 está referida a T-,
por lo que es enviada a un optoacoplador (ECG3083) con el fin
de tener la señal C2 referida a T+.
Una vez obtenidas las dos señales bajo una misma referencia
se las envia como entradas de una compuerta ÑOR para obtener
el estado lógico que es respuesta de la sobrecorriente en
cualquiera de los transistores.
La sobrecorriente en el transistor T-*~ es detectada cuando ha
existido sobrecorriente en el troceador funcionando en el
primer cuadrante, y en transistor T- cuando ha existido
sobrecorriente del troceador funcionando en el segundo
cuadrante.
Para el caso del control no simultáneo, sólo se requiere
protección de sobrecorriente cuando se trabaja en el primer
cuadrante y su diseño es similar a lo explicado en el control
simultáneo, con la diferencia de que no existe aquí la
compuerta ÑOR, ya que los pulsos de control a ser
interrumpidos en el instante de la sobrecorriente son sólo
para el transitor T+. Cuando se trabaja en el segundo
cuadrante no se requiere hacer protección de sobrecorriente
ya que el control de rizado es un circuito autoprotegido.
104
2.4.5.2 PROTECCIÓN CONTRA SOBREVOLTAJE.
El sistema cuenta con protección de sobrevo1taje en el
supuesto caso de que el operador ignorase los rangos máximos
de operación del equipo. Su funcionamiento se basa en el
hecho de sensar el voltaje existente en un divisor de tensión
puesto en la entrada de la alimentación primaria y compararlo
con un voltaje de referncia, de forma que si ocurriese un
sobrevoltaje la salida del comparador cambiará de alto a
bajo. Esta señal es enviada a una de las entradas de una
compuerta NAND. El esquema circuital respectivo consta en los
anexos de protección de sobrevoltaje.
Cuando suceda un sobrevoltaje, se abrirá un contacto que
alimenta al semipuente dejando sin voltaje DC primario al
semipuente y haciendo que el voltaje en la carga sea cero.
2.4.5.3 PROTECCIÓN CONTRA POLARIDAD INVERTIDA.
En el supuesto caso de que el operador conectase en
forma invertida la polaridad de la fuente primaria DC, el
equipo está calibrado para abrir un contacto de forma que se
deje sin la alimentación de la fuente primaria en el caso de
sobrepasar los 155 VDC, para este caso únicamente quedarán
aplicados los pulsos de control a las bases de los
transistores. El anexo respectivo indicará el circuito de
protección contra polaridad invertida.

105
Esta protección evita que haya un cortocircuito franco
en la fuente primaria DC a través de los diodos que están
entre colector y emisor de cada transistor
2.4.5.4 PROTECCIÓN CONTRA PERDIDA DK EXCITACIÓN.
Cuando la carga seleccionada a trabajar sea un motor DC
con excitación independiente existirá el riesgo de perder la
excitación o el campo, logrando así el embalamiento del motor
con las consiguientes desventajas de esto.
Esta protección se hizo necesaria en vista de que al perder
el campo el motor, la operación del motor tiende a salirse de
los rangos de operación segura permisibles.
X X X
MONTAJE Y X>EX. EQUI1PO MODUX^VR
106
CAPITULO III: MONTAJE Y PRUEBAS DEL EQUIPO MODULAR.
Constan en este capitulo fotos acerca de los detalles
constructivos, comprobación de las formas de onda en cada
técnica de control; efectos que se producen cuando no ee
considera la inductancia de filtrado de corriente de salida
del troceador, efecto de la conmutación de un cuadrante a
otro mediante cada técnica de control, efecto de la pérdida
de excitación en lo que tiene que ver a la operación de la
protección; análisis completo de la eficiencia del troceador,
para lo cual, se presentan datos y curvas de rendimiento en
función otros parámetros medidos en el equipo, así como el
rendimiento calculado a base de las pérdidas presentes en los
semiconductores de potencia.
107
Iroto 1, Detalles constructivos .
Foto 2. Detalles constructivos.
108
Foto 3. Detalles constructivos.
¡<
Foto 4. Detalles constructivos.

109
3.1 COMPROBACIÓN DE LAS FORMAS DE ONDA EN CADA TÉCNICA DE
CONTROL.
3.1.1 TROCEADOR CON CONTROL SIMULTANEO EN EL PRIMER
CUADRANTE.
O
O
Fig. 3.00 Voltaje y corriente en la carga,6 > 0.5
Escalas: Eje Y: Vo: 50 V/div.
lo: 2 V/div.
Eje X: Frecuencia: 0.5 ms/div.
Rm: resistencia de muestreo. Rm = 1.6 Q
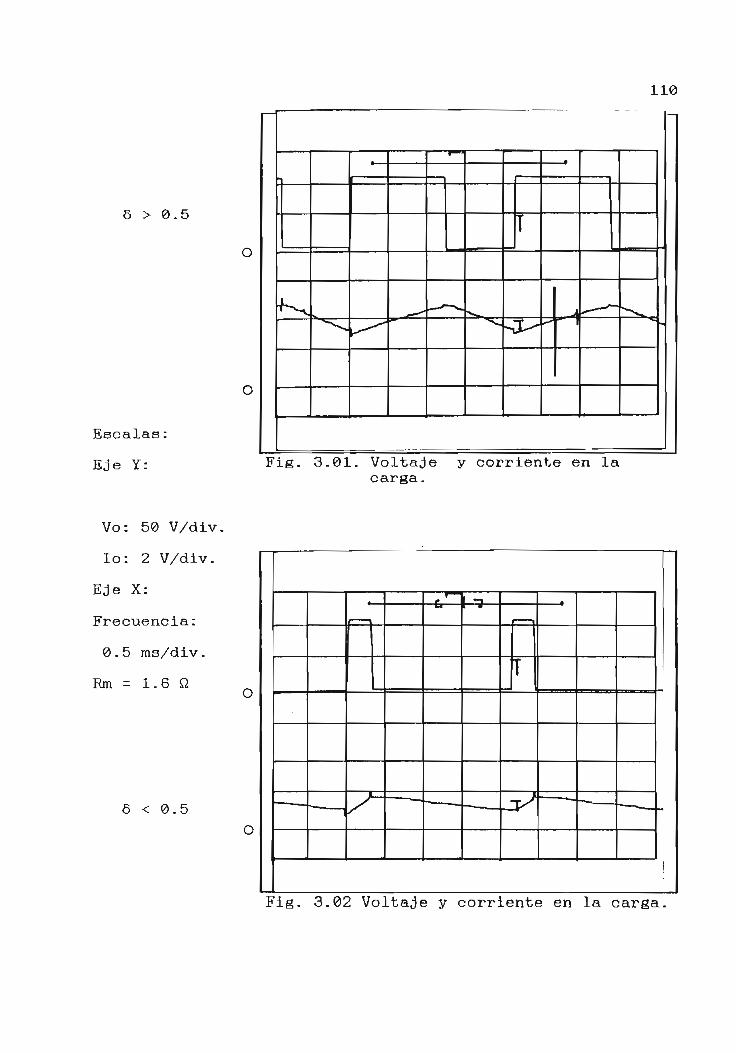
110
6 > 0.5
O
O
Escalas:
Eje Y:
^ -" _, — •
*~"
OTBM
-~s—^
Fig. 3.01. Voltaje
_
•g
t
-J --*
•
^""H-'-"• "" —
X
-
y corriente en lacarga.
Vo: 50 V/div.
lo: 2 V/div.
Eje X:
Frecuencia:
0.5 ms/div.
Rm = 1.6 QO
6 < 0.5O
í
Fig. 3.02 Voltaje y corriente en la carga.
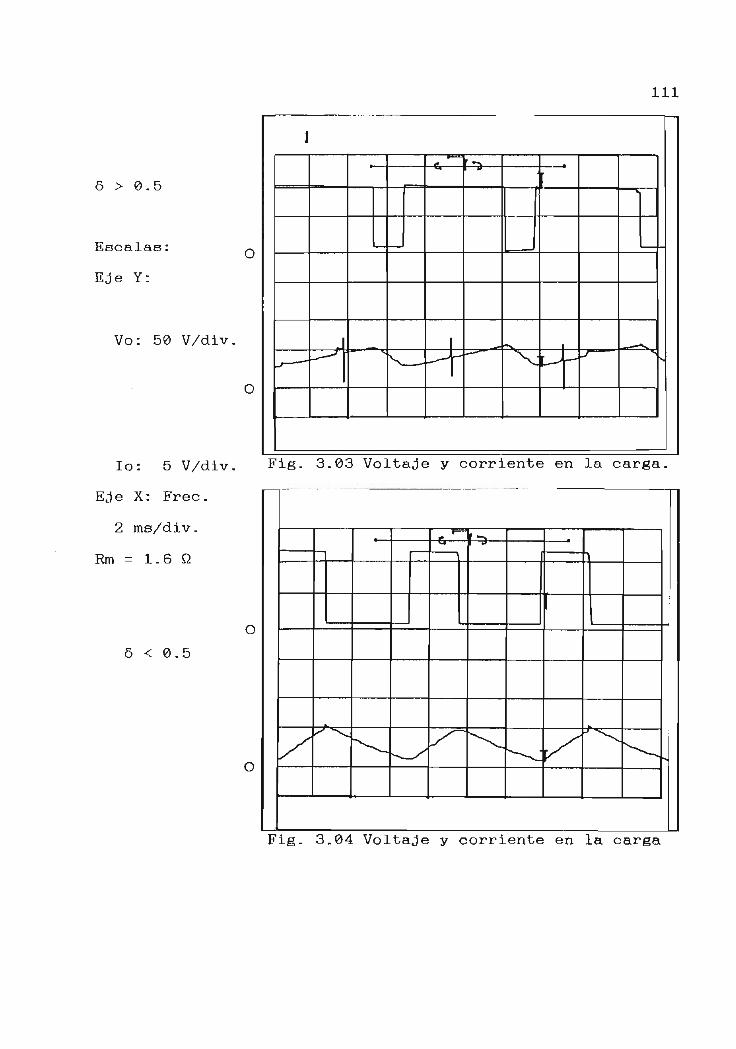
111
6 > 0.5
Escalas:
Eje Y:
Vo: 50 V/div.
O
O
lo: 5 V/div.
Eje X: Frec.
2 ms/div.
Rm = 1.6 Q
Fig. 3.03 Voltaje y corriente en la carga.
O
5 < 0.5
O
Fig. 3.04 Voltaje y corriente en la carga
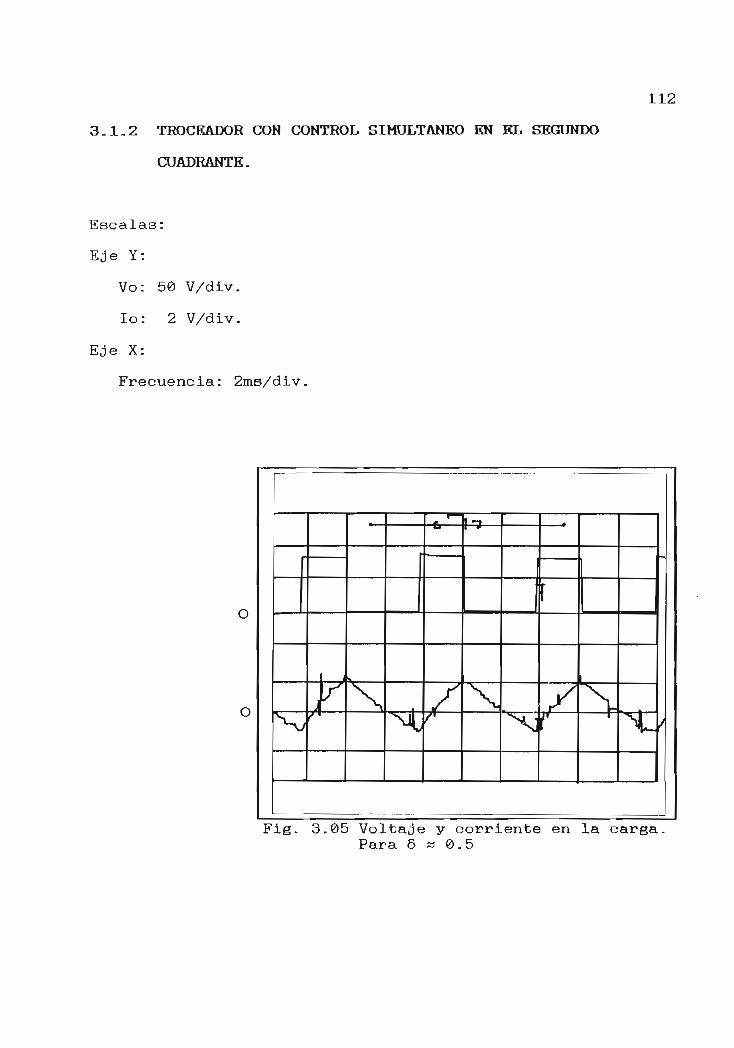
112
3.1.2 TROCEADOR CON CONTROL SIMULTANEO EN EL SEGUNDO
CUADRANTE-
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 2 V/div.
Eje X:
Frecuenc ia: 2ms/div.
O
O t
Fig. 3.05 Voltaje y corriente en la carga.Para 5 ss 0.5
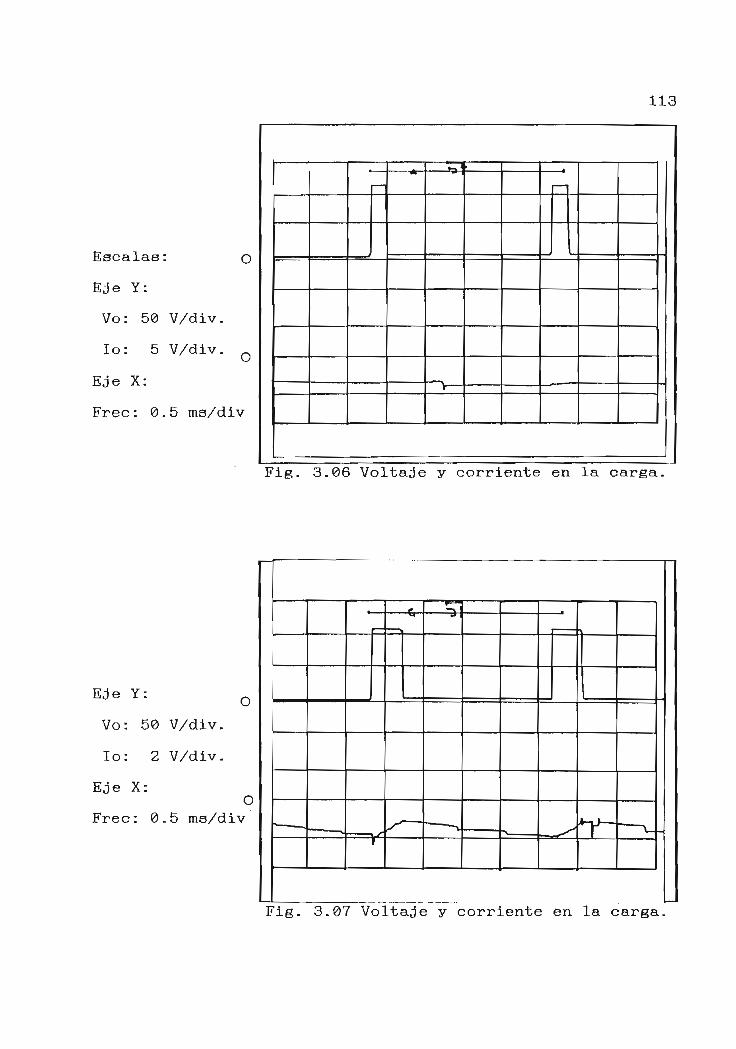
113
Eacalas: o
Eje Y:
Vo: 50 V/div,
lo: 5 V/div
Eje X:
Frec: 0.5 ms/div
O
Fig. 3.06 Voltaje y corriente en la carga.
Eje Y:
Vo: 50 V/div.
lo: 2 V/div.
Eje X:
O
OFrec: 0.5 ms/div
Fig. 3.07 Voltaje y corriente en la carga.
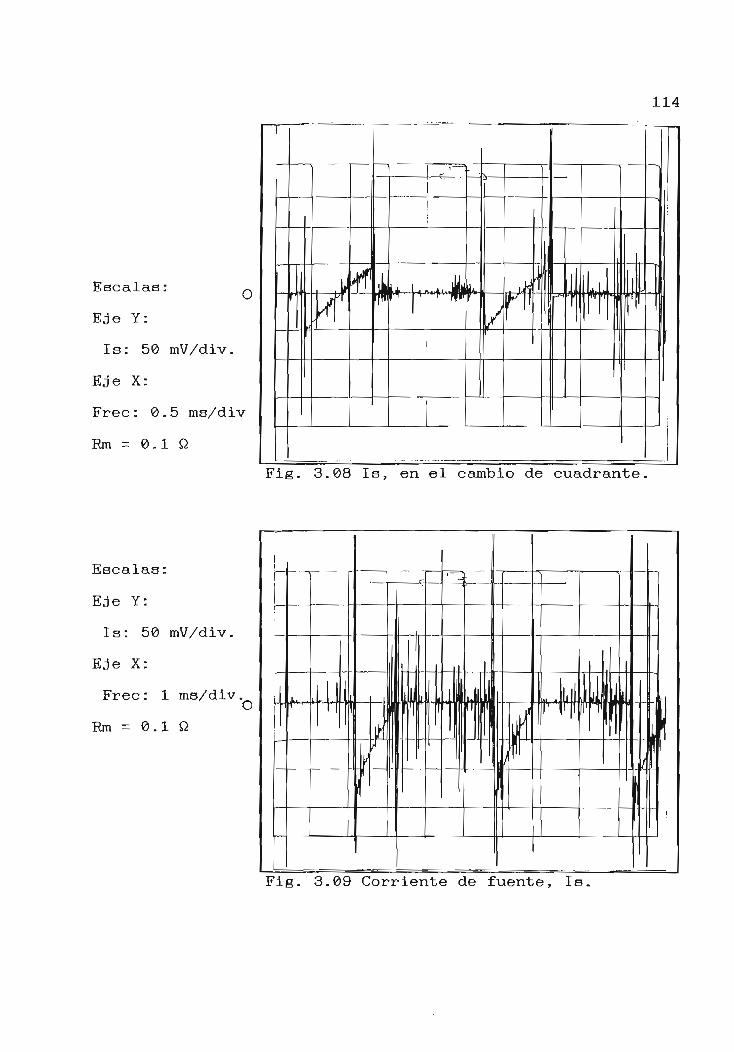
114
Is: 50 mV/div.
Freo: 0.5 ms/div
Fig. 3.08 Is, en el cambio de cuadrante
Escalas:
Eje Y:
Is: 50 mV/div.
Eje X:
Freo: 1 ms/div
Rm = 0.1 QO
Fig. 3.09 Corriente de fuente, Is.

115
3.1.3 TROCEADOR CON CONTROL NO SIMULTANEO EN EL PRIMER
CUADRANTE.
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 2 V/div.
Eje X:
Freo: 0.2 ms/div,
5 « 1
Rm = 1.6 Q
O
O
Fig. 3.10 Voltaje y corriente en la carga.
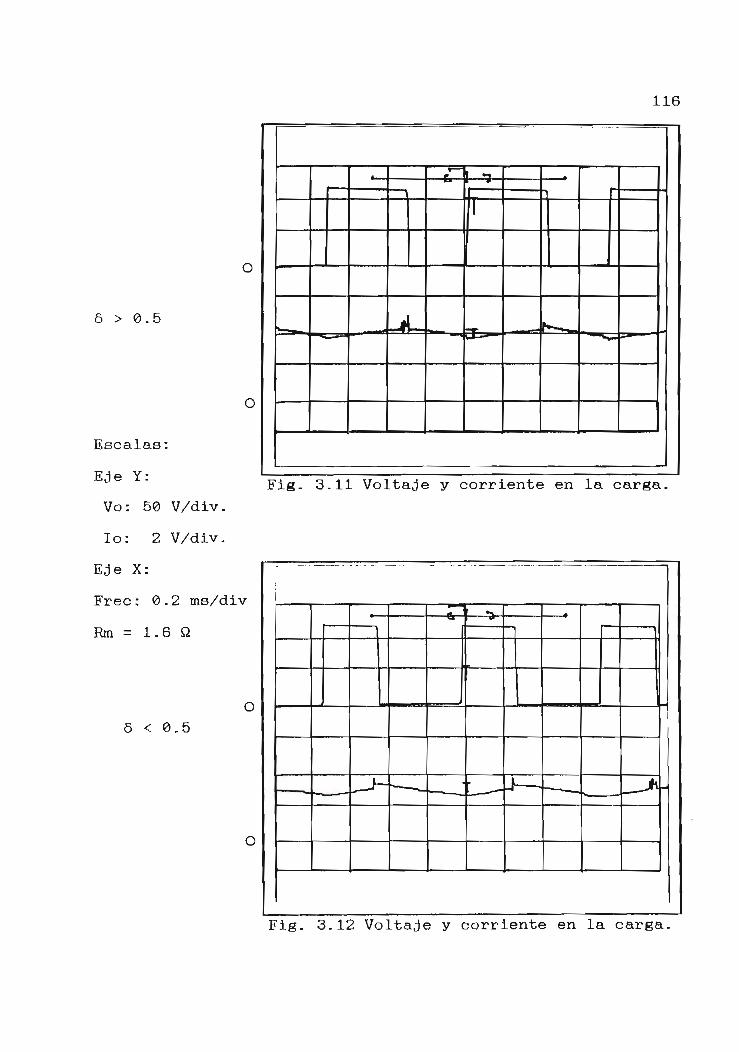
116
O
6 > 0.5
O
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 2 V/div.
Eje X:
Freo: 0.2 ms/div
Rm = 1.6 Q
Fig. 3.11 Voltaje y corriente en la carga,
O6 < 0.5
O
Fig. 3.12 Voltaje y corriente en la carga,

117
6 > 0.5O
O
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 5 V/div.
Eje X:
Frec: 1 ms/div.
Rm = 1.6 Q
Fig. 3.13 Voltaje y corriente en la carga.
O
6 < 0.5
O
Fig. 3.14 Voltaje y corriente en la carga.
-í
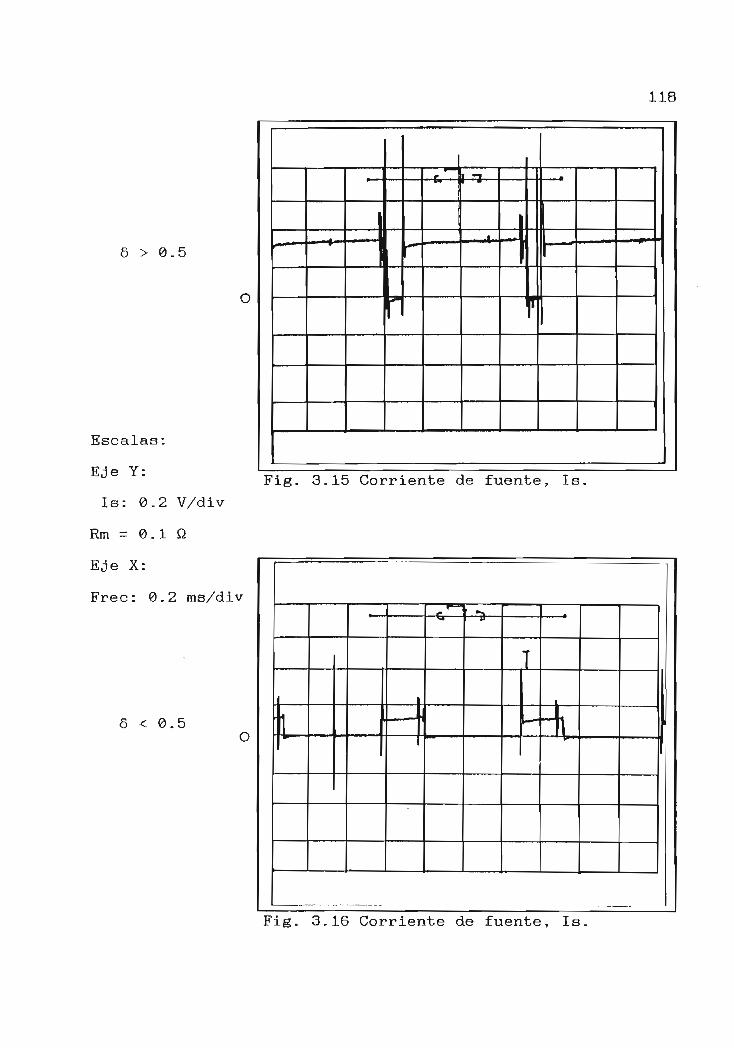
118
6 > 0.5
O
Escalas:
Eje Y:
Is: 0.2 V/div
Rm = 0.1 Q
Eje X:
Freo: 0.2 ms/div
Fig. 3.15 Corriente de fuente, Is.
6 < 0.5O
Fig. 3.16 Corriente de fuente, Is.
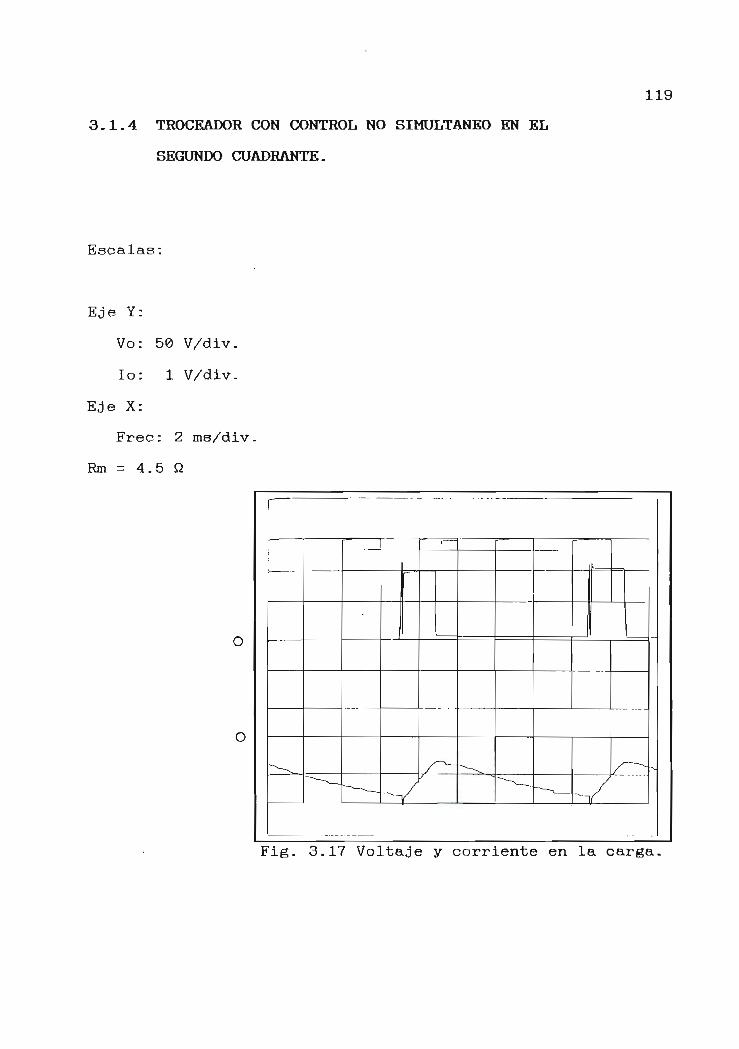
119
3.1.4 TROCEADOR CON CONTROL NO SIMULTANEO EN EL
SEGUNDO CUADRANTE.
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 1 V/div.
Eje X:
Frec: 2 ms/div,
Rm = 4.5 Q
O
O
Fig. 3.17 Voltaje y corriente en la carga.
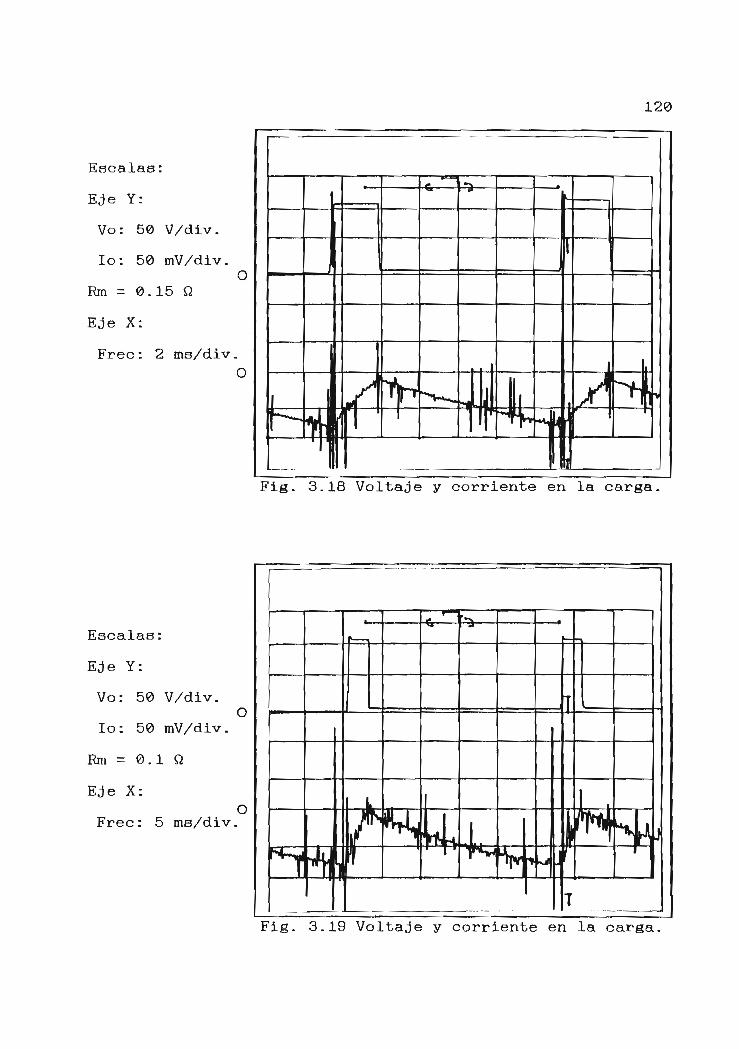
120
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 50 mV/div.
Rm = 0.15 Q
Eje X:
Frec: 2 ms/div
O
O
Fig. 3.18 Voltaje y corriente en la carga.
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 50 mV/div.
Rm = 0.1 Q
Eje X:
Frec: 5 ms/div.
O
O
Fig. 3.19 Voltaje y corriente en la carga.
121
3.2 EFECTOS QUE SE PRODUCEN:
3.2.1 EFECTO DE LA VARIACIÓN DE LA INDUCTANCIA DE FILTRADO.
El efecto de variar la inductancia de filtro de
corriente a la salida del convertidor es de suma importancia.
Esta inductancia debe ser capaz de conducir la corriente
nominal de la máquina, por lo que, si aumentamos el valor de
la inductancia LF, aumentará el costo, tamaño y peso del
equipo.
De las formas de onda de corriente y voltaje sobre la
carga a diferentes valores de inductancia se concluye que al
aumentar el valor de la inductancia LF, se logra aplanar la
onda de corriente sobre la carga pero con la desventaja de
aumentar costo, tamaño y peso del equipo.
Las figuras 3.20 y 3.21 muestran el efecto sobre la
corriente de salida del troceador cuando se hace funcionar la
máquina primero sin inductancia de filtro y luego con
inductancia de filtro. Esta prueba se la hizo para el mismo
valor de frecuencia, observándose un aplanamiento de la señal
de corriente de salida.
Nótese que en la figura 3.20, si se disminuye la
frecuencia de operación del troceador, comenzarla la
conducción discontinua, lo cual resulta desventajoso para la
operación de la máquina misma.

SIN LF:
122
O
O
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 5 V/div.
Rm = 1.6 Q
Eje X:
Frec: 0.2 ms/div
Fig. 3.20 Voltaje y corriente en la carga,
O
CON LF:
O
Fig. 3.21 Voltaje y corriente en la carga.

123
O
O
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 1 V/div.
Rm = 4.5 Q
Eje X:
Freo: 0.5 ms/div
O
Fig. 3.22 Límite de continuidad sin LF.
O
Fig. 3.23 Conducción discontinua sin LF.
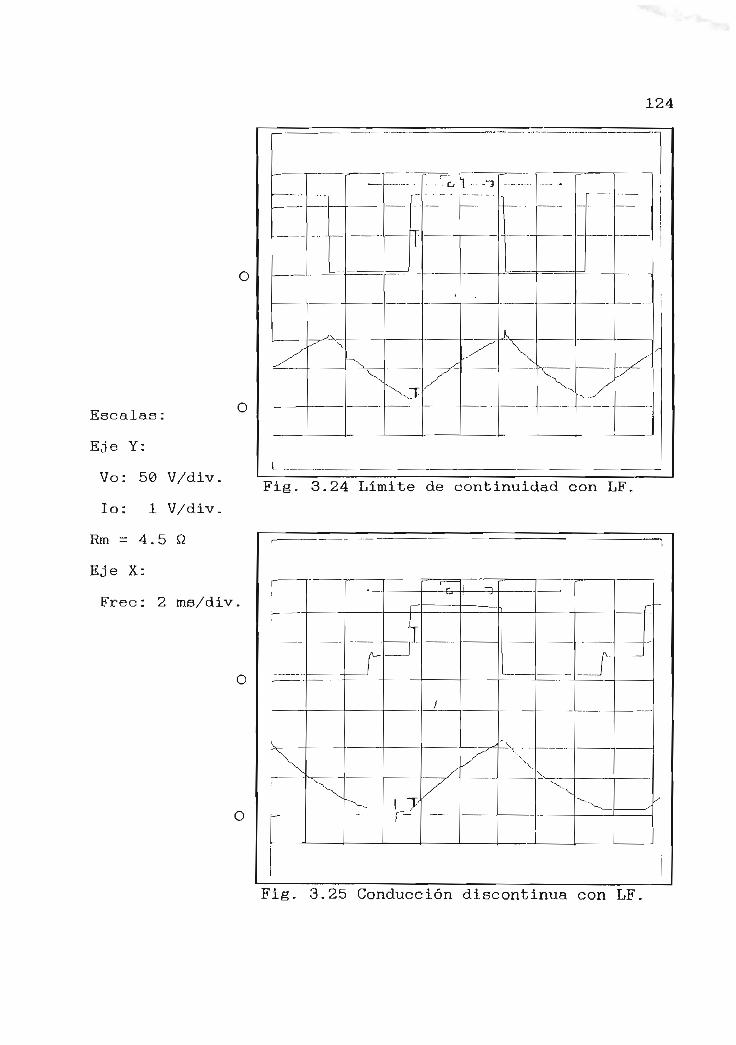
124
O
Escalas:
Eje Y:
Vo: 50 V/div.
lo: 1 V/div.
Rm - 4.5 Q
Eje X:
Freo: 2 ms/div.
O
T
T
Fig. 3.24 Limite de continuidad con LF,
O
O
_I
7
Fig. 3.25 Conducción discontinua con LF.
125
3.2-2 EFECTO DE LA CONMUTACIÓN ENTRE EL I Y II CUADRANTE EN
LOS DOS TIPOS DE CONTROLES.
Refiriéndonos al control simultáneo, la conmutación
entre el cuadrante I y el cuadrante II, se la realiza a
través del respectivo potenciómetro que controla la relación
de trabajo. Cuando la relación de trabajo está entre 0.5 y
1.0, aproximadamente, y al equipo está conectado carga
activa, la máquina se comporta como motor, donde se tiene
valor medio de corriente sobre la carga que es positivo y con
cierto rizado.
Cuando la relación de trabajo está entre 0 y 0.5,
aproximadamente, y al equipo está conectada carga activa, la
máquina se comporta como generador, donde el valor medio de
corriente sobre la carga es negativo, lográndose así la
regeneración en el control simultáneo.
De esta forma, la conmutación entre el cuadrante I y II
a través del potenciómetro de delta es de forma suave ya que
primero el valor medio de la corriente sobre la carga se debe
hacer cero para poder cambiar de cuadrante de operación.
Para este caso, trabajan los dos transistores de potencia en
forma complementaria durante un mismo período de trabajo.
En el control no simultáneo, durante un mismo período de
trabajo sólo está activo uno de los dos transistores de
potencia, que puede ser el superior o el inferior del
semipuente, dependiedo del cuadrante que se haya escogido a
través del selector de dos posiciones; por lo tanto al

126
conmutar dicho selector de una posición a otra, es decir, del
cuadrante I al II, lo que se obtiene es un cambio brusco, ya
que ahora la corriente no se ha hecho cero antes de provocar
el cambio de cuadrante. Sin embargo de todo esto, hay que
señalar que el control de rizado es un circuito
autoprotegido, y la opción de cambio de cuadrante es sólo del
cuadrante I al II.
3.2.3 PERDIDA DE EXCITACIÓN EN LA MAQUINA DE DC
El efecto de la pérdida de excitación en la máquina de
DC con excitación independiente sobre troceador radica en el
hecho de incrementar la corriente de armadura, de forma que
la protección de sobrecorriente para los transistores de
potencia actuarla, apagando los semiconductores.
El efecto de la pérdida de excitación sobre la máquina
misma, radicaría eri su incremento de velocidad debido a la
ausencia de campo.
El equipo dispone de una protección contra pérdida de
excitación, a través de la cual se sensa el voltaje de campo
y si este voltaje es menor que un valor mínimo o si es que no
hay campo, existe un contacto que se abre y deja sin
alimentación a la armadura del motor haciendo que el motor se
frene _
Como el equipo ya dispone de esta protección, ésta es la
que primero actúa y no la protección de eobrecorriente, ya
que hasta que la corriente alcance un valor límite debido a
la pérdida de excitación ha transcurrido cierto tiempo que es

127
mayor al que se demora en operar el contacto que esta en
serie con la armadura del motor.
3.3 EFICIENCIA DEL TROCEADOR:
La eficiencia del troceador dependerá de las pérdidas en
los darlington de potencia principalmente. Las pérdidas en
los semiconductores de potencia van a depender de la
frecuencia de operación, y es asi que se tiene:
- Para bajas frecuencias, las pérdidas estáticas son
mayores que las dinámicas,
Para altas frecuencias las pérdidas dinámicas son
mayores que las estáticas.
La expresión para el cálculo de la potencia media o de
pérdidas en cada transistor de potencia está dada por:
j.
I .]vCE.i c.dt C166)per.0
La potencia de entrada al troceador será:
P * £.1 = Vd.I (167)
La potencia de salida del convertidor estará dada por:

p o p ' - pf
El rendimiento del troceador es:
128
(168)
O100 (169)
Para el cálculo de las pérdidas en loe transistores de
potencia, se considera la Fig. 3.26, donde se observan las
transiciones de corte a saturación del semiconductor.
VO»
<MIM*__ «-«
Fig. 3.26 Formas de onda de voltaje colector-emisor,corriente de colector y potencia.
Hay que considerar que este cálculo de rendimiento es un
cálculo aproximado ya que el voltaje colector-emisor y la
corriente de colector han sido considerados lineales en los
instantes de conmutación tanto en corte como en saturación.

129
En vista de que las frecuencias límites de operación del
convertidor son de 100 Hz y 2.5 KHz se procederá al cálculo
de las pérdidas en los transistores a estas frecuencias.
Considerando un sólo transistor, se tiene:
IPULSQS
VCC = Í50V
lo = 7A
tON = 0.5uS
tQFF = i.EuS
VCE sat. =
Fig. 3.27 Esquema de troceador con un transistor.
a) Para 100 Hz, se obtiene los siguientes resultados:
0.5 us
P - 60 ( í VCE-
(170) 0
0.0166646^
J0
v CE-
1.5 us
-i- f v rw. ícdt)1 L^zS
0
P m 60(0.117)^. =7.02 W. (171)
Efectuando el mismo cálculo para la frecuencia máxima de
trabajo 2.5 KHz, se tiene unas pérdidas en cada transistor de
7.836W.
130
Considerando que existen dos transistores y dos diodos de
potencia y que la pérdida en cada uno es 10 W. , se tiene el
siguiente rendimiento a esta frecuencia.
P ± » 150 VDC*7A - 1050V (172)
P m P . - P* o c i ^ per
73 % * -*100 » 96.2% (174)P i
RENDIMIENTO MEDIDO:
Se presentan a continuación datos y curvas obtenidas en
el equipo de rendimiento versus relación de trabajo,
corriente de carga y frecuencia de operación, ésto con el fin
de comparar el rendimiento medido con el rendimiento
calculado y tener una idea aproximada de los rangos de
variación de cada uno de los parámetros anteriores para
mantener el rendimiento en un porcentaje aceptable.
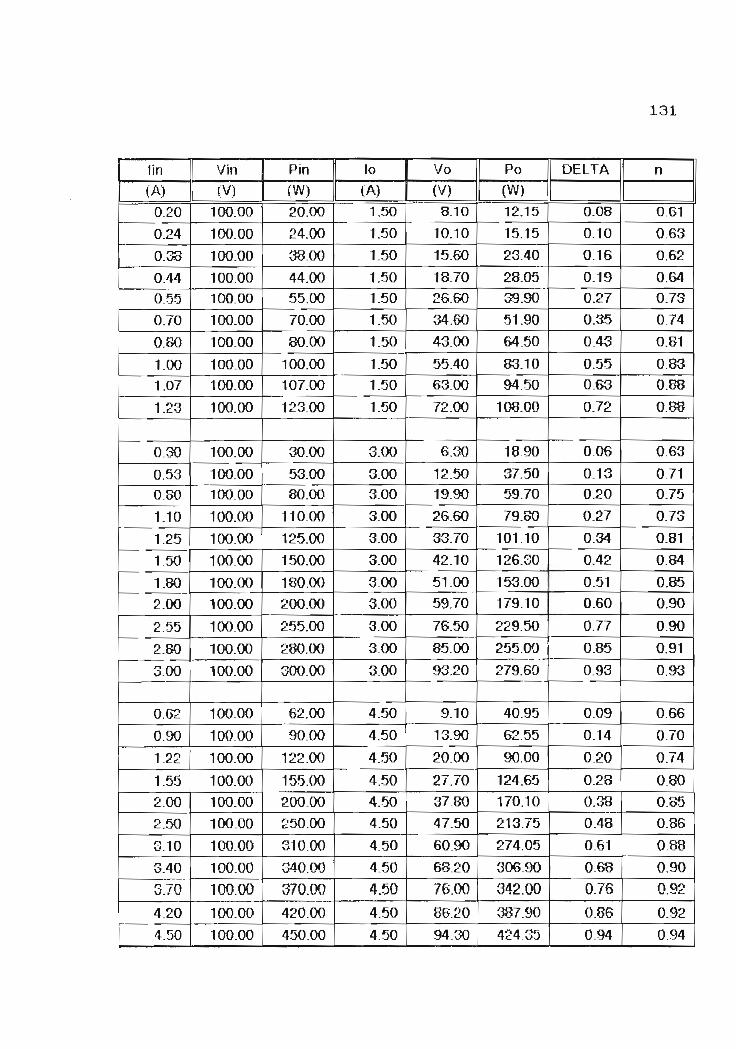
t?60
S6'0
cG'O06'0
88098'0SS'OOSO
Vl'O
010
990
S6'0
160
060
060
SS'O
wo180
CIO
Gi'oL I OG9"0
sao880
C80
ISO
vzoerowo390
£9'0190
U
WQ
98"0
SZ'O890
L9"0
evoSfí'O
SZ'O
ozofrLOGO'O
S6'0
£80
¿¿'0
0901503fr"0
freozsoosoero900
31'Q
G9'0
SS'QevoS£'0
/S'O
GL'O
9 L O
O L OSO'O
V113Q
csvet?06'¿8G
oo'2*e0690S
eo'fr¿sSZ'SI-S
O L O Z LQ9'^3l
oo'oeQS"39
GG'Oi?
09'6ZS
OO'SSS
oQ'ezs01/611.
OO'BSI.
OS9SL
O L ' I O L
08"6Z
OZ'GG
OS'IC
0681
OO'SOt
OG'fr€oresOS'W
06 IS
06'6C
SO'SS
Ofr'DS
creí.GTgL
(AA)Od
oc'fre0598
00'9Z
03"S9
06"09
OS'11?
OS'ZS
OZ'ZS
0003
06SI
OL'G
OS'CG
OO'QS
0^'9Z
OZ'6£
00 LS
oretoz'ce09'92
06 GL
QQZl
Ofí'9
OO'SZ
00 £9
Ofr'GG
OO'Sfr
09>e09'9SOZ'81
09'GL
OL'Ol
O L S
(A)
OA
OG'fr
OG'1?
05^OG'frOG'VOG'i?
05"t?
OS"*OG'frOG'l?OQfc
OO'G
oosOO'G
OO'G
OOC
OO'S
oo~eOO'CooeOO'C
OO'S
OQ't
OG'L
OS'LOfiflOG'L
OG 1
05 L
OG'tOG'L
OG'L
(V)0|
OO'OGfr
OO'OSfr
oo'oieOO'Ot'S
00 OlS
OO'OGS
00003
OQ'SSL
00'S3L
00"06
00.39
00 OOC
00'083
OO'GGS
00003
OO'OSL
OO'QGL
OO'GSl
000 U
00'08OO'SG
00~OS
oo^esi-00' 101OOOOL
OO'OS
oo-ozOO'GG
OO'frli'
00 8C
00^3
00'02
(AA)Uíd
OOOOL
OO'OOI-
OO'OOlOO'OOL
OO'OOl
00' 001
OO'OOl
OO'OOt
OOOOL
OO'OOL
OOOOL
OO'OOL
00 001-
OO'OOL
OO'OOl
OO'OOL
OOOOL
OOOOL
00^00 L
OO'OOLOOOOL
OO'OOL
OO'OOL
OO'OOL
OO'OOL
OO'OOL
OO'OOL
OO'OOLOO'OOL
00-00 L
OO'OOL
OOOOL
(A)
u[A
OG't'03fc
ÜZ'C01?'SOL'S
OS" 3
OQjSSG"l•y-?- i'>»-/ 1-
06'0
S9'0
ooe09'3
fifi'iB
OO'S
08 L
05 L
SS'LO L ' L
OfíO
CG'O
OC'O
C^L10' L
00' L
080
OZ'O
GSO
woecofó'Q
030
cjrtU!l
TGT

132
RENDIMIENTO-DELTACORRIENTE DE CARGA CONSTANTE (A)
u.y^n
O Q.y
O OK.OO
Oh-~£- O £}tu uy
5Q n "7K__ U.íO¿LLU
^ 0^0.7-
.DD-]
n R-
j* *ÍW" f-~tíf.. i 't f,
•'"^^Sf^jJ(ff££Zf- * Va" JO „ J/\~ _ ~' |« , . _
lo - 4. 5 A " "ZZX ^^-^ /
/ s^*~ ^«já_...«£ f.. m^......
/ 71 / X/ /: ...A» / M \v ^- v4/ i ... .... A- -^ J
i / lo = 1.5A$ iv: ?¿ ^
O 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1DELTA
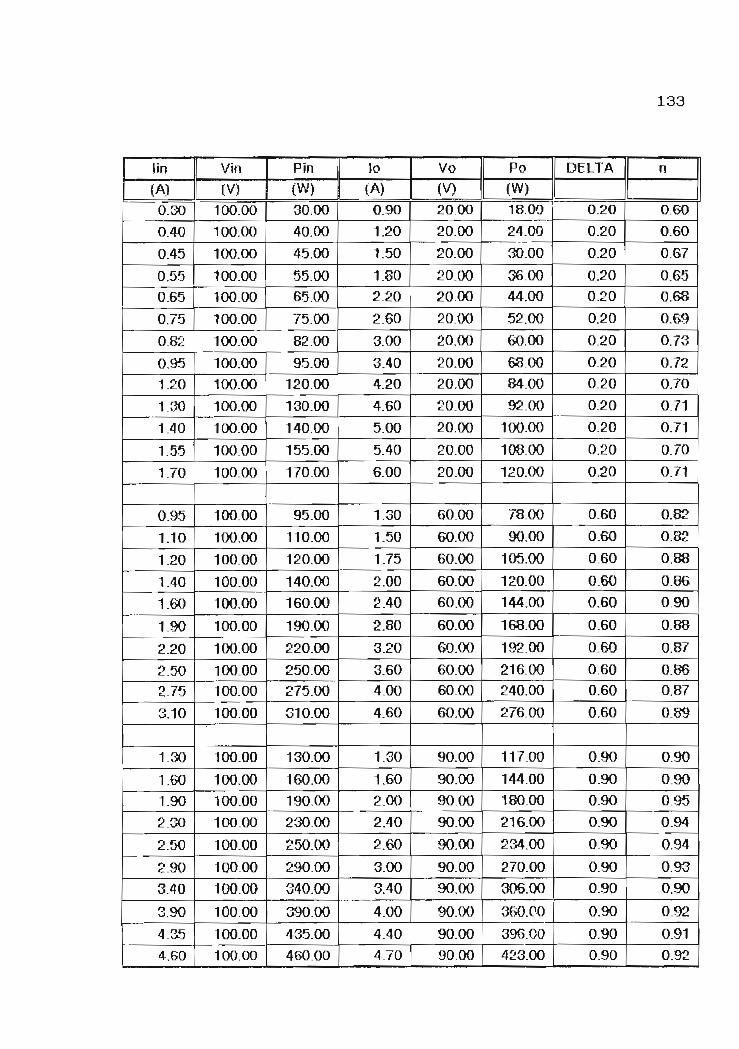
c H _J LU Q o o. o — ,fe a. .2=> C
5 s. Sí
d- 5'
C--
§ o o C-J o o o co r- 8 O OJ o cr> o g Q CO o o 8
'
rS
O co o o CM o 8 OJ g o OJ o g o o o o o o ó
co o o C'J o 8 ¡R g o C'J o LO T— 8 LO *t 0 Q LO
LO CO o o CM o g 8 g o OJ o co T— g LO 0 o o o L
OLO
cg o o o g «t 8 o C'J o CM CM 8 LO 0 o «r? co
o? co Q o OJ o 8 CM
LO g o CM o co OJ 8 LO 0 o LO
5 O o CM o g 8 8 o OJ o o co g ÍM co 0 o CNJ
CU
CM o o OJ o g g o OJ o g LO o o o o 8. ó
o o o OJ o g SE g o o C-4 g 0 r> o o C'J
T-
O o OJ o o o C'J 8 o C'J o co 8 O o o 8
- o o CM o g 8 T— g o CM O o tO g o r> o Q O S
o o o OJ o g g i— g o OJ o 8 LO L
O o o o o LO
- o o o g o f-J r- g o C-J o o g 0 h- o o o o o
8 o o co o 8 R g o o T— g LO 0 o m ff?
s o § o g wJ g s o LO g o o o o T—
co ÍO o o co o 8 8 r- g o co LO r- T— 8 o CM o o o o o OJ
ES o 8 o o o o C'J
T" g o o o OJ g o T 0 o o o o
g o s o g ? T— g o o CM g o co Q o 8
g o o co o g s r- g g o co CM 8 o Cfi o o 8
co o s o g Si ^" g o o f-d co 8 Cs
OJ
0 o o OJ
g o g o g co T— OJ g o o g o LO o o LO
N.
co o o o g o CM g o co o o g LO o o LO N.
C? Co o § o g S C'J g o CO o co g o T— o o o r—
§ o s o g T— " g o o? o g 0 o o ... 8
g o s o o o 1± T— g o O) o co r- g o co o o S
'_ 8.
g o s o o o g " g o O) g OJ g o en o o 8
s o 8 o 8 co T— OJ g o CT? o OJ g o o o 8
cS o s o 8 s Cxi 8 g o co OJ 8 o L
O o o ,-,
LO
co o g o g o r-- OJ g o co o o co g o CT5 o o 8
8 o g o g 8 co g g § co 8 o co o o _ o
OJ o g o c o g u g o CD 0 0 g o $? o o o o C?í
£ o o co o o g co g o CD o 8 LO co o o ...
LO co
OJ o o o? o o o co C
M V g o o o o 0 co 0 o 8.

134
RENDIMIENTO - CORRIENTE DE CARGADELTA CONSTANTE
U
z:LU
-^QZIUec
u. yo
O Q_.y
O Ot;_,oO
.y-1
O ytrL. _./ 3
0 -7. /
O fc£.00
O c,O
n KF;_
/^*~*~-WL ^^—j,^ DELTA = 0.9. ^ jj, .^^ - .'. .- . . . .
/ ~-*-_^ ^-^*^v. X -- -**^^ _,_ . . — •-*'' " fí " S- A, " K
. / ^ [DELTA = 0.6*_^ i
j* .X -L ^~ >_« frj~~' ~ ~*^V_ _J 1
^-- \ " X
y DELTA - 0.2
. ,/
2 3 4
CORRIENTE DE CARGA
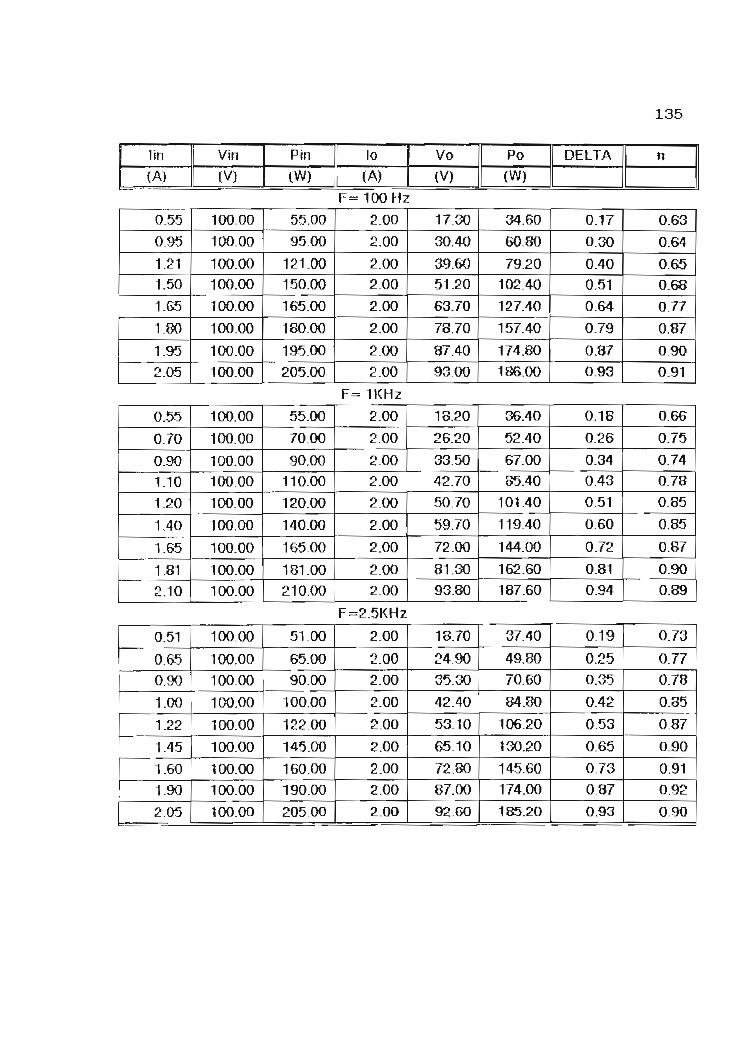
po s g o o [O o Oí ro o o ce w § § ro o o CO CO O 8
— t 8 8 o o co p rO O O CQ •J 8 •s £* 8 o co ^ o co ro
§ g o o — L o p ro o o "Vj ro § -
MÍ.
•P*
Oí C5 O O 3 o o «i.
.p» Oí g o o *Í en re o o CO oí _4 o _4 8 N5 O o co Oí o co o
—i ro ro 8 o o ro ro ro O O Oí co — -o I ro o O Oí co O 03 N
«A 8 g o o -J. o p ro o o A rO ¿h o s o: o o A ro o s
o 8 O O o o CO p ro o o co oí 8 -si o oí o o co Oí o H CO
o CO 0! 8 o o co 01 fO o o no •e* ÍO O •P*
CU ca o o ro Oí o -H|
•s]
O Oí g O o Oí _]. ro o o «4
03 ^O co -M Jh o o «J> <o o co
N
—i o g o o M ™4 o 8 ro o o co co 8 _t CO J CD o o to -fk o 3
CO — - g O o —A co_l 8 ro o o 03 — <. 8 _j.
O? ro ffío o co —: o g
CD Oí g o o _¿
CD Oí o o ro o o vi ro 8 —^ S 8 O H PO o co N
1& O 8 o o -í* o 8 ro o o Oí ¿O 3 — i
CO o o § o 03 OÍ
ro O o o o o ro O 8 ro o o Oí o o _ - o «Jl A* o o Oí _1 o 03 Oí
-a o g o Q ~¿
O 8 ro o o -fr |O XJ O a j* o o -> co o J co
g o o Cj5 O 8 ro o o co co 8 Oí -Nj o o o co *. o --J A
o J o g o o xl o 8 ro o o ro co ro O Oí ro £» O O ro CO o ->j Oí
oí Oí g o o Oí Oí 8 ro O Q —A 03 ro O g A o Q -J.
CO O S
8 b o o Oí 8 ro b o co co i b o o s o co
ss b o co Oí 8 ro b o co -j is •s Jfc co o o Si p
8 b o « o 8 ro b o *y 03 o «L
ü|N '*. O o ^co o co •s
CT?
Oí 1 O Oí 8 ro b o 01 co o i»4 ro J A o o s o J <3
— 8 b 0 O! O 8 ro b o Oí _i ro O s 4 O O bi —i o '8
ro —i b o ro 8 ro b o o co 8 3 ro O O lp» O o co Oí
*-
o CO ot b o COOí 8 ro b o co o ^o 8 O 03 O O 8
O oí Oí b o Oí Oí o o ro b o _L
^•\
CO O p I— 1 O co co
TI
íl N
< o TI
O rn p-
Oí
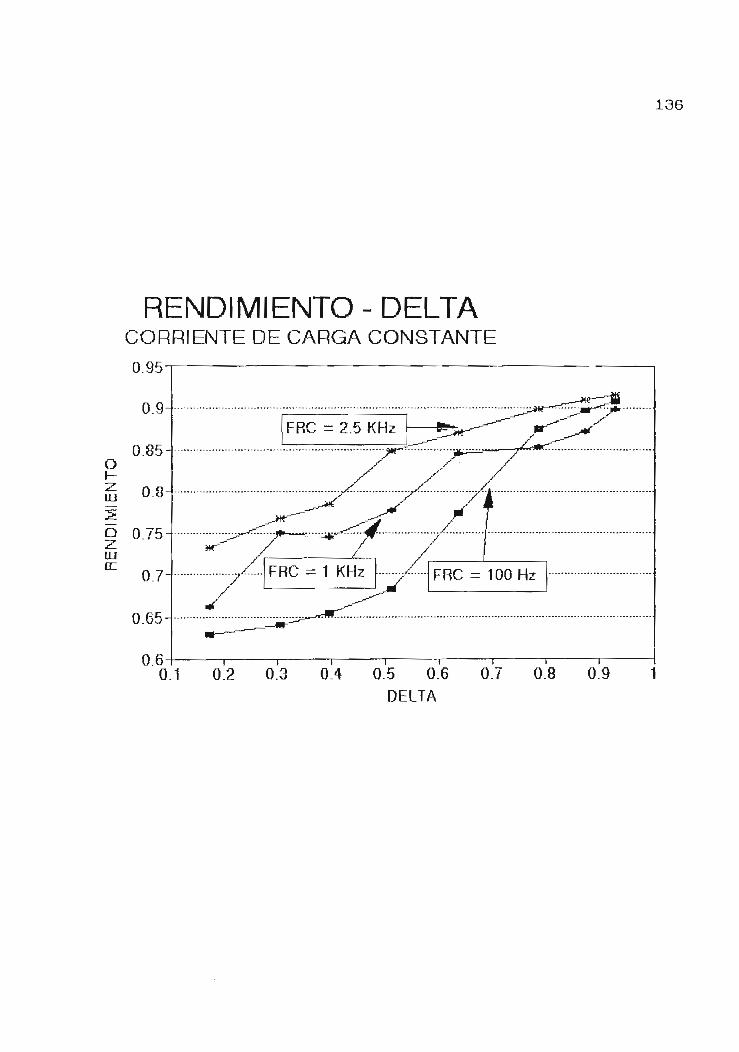
136
RENDIMIENTO-DELTACORRIENTE DE CARGA CONSTANTE
0h-UJ
10
OJce
0.9-
0.85-
0.8-
0.75-
0.7-
0.65-
n «
^_^*e— -jg.J -ÍW Jü ^N
pno •*> i~i wi i fehb. ,'-~fJ~' ... j-J"^" ,1-1 1 »W — ¿,-J I\ \¿- 9~ *#£-*- W _.J-J*Í
7- /^~~r~?*" "^ -yf-.j-
w-^ ^X / T
^ /*~~~* / 'jf i /• 1
/ . 1 FRO — 1 KHy /..... \~r\r* inn u-»7 rno i r\n¿ --^ r-HO — IUU MZ/ i jj
¿ ^m^'"
m— —^ ~~**~
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1DELTA
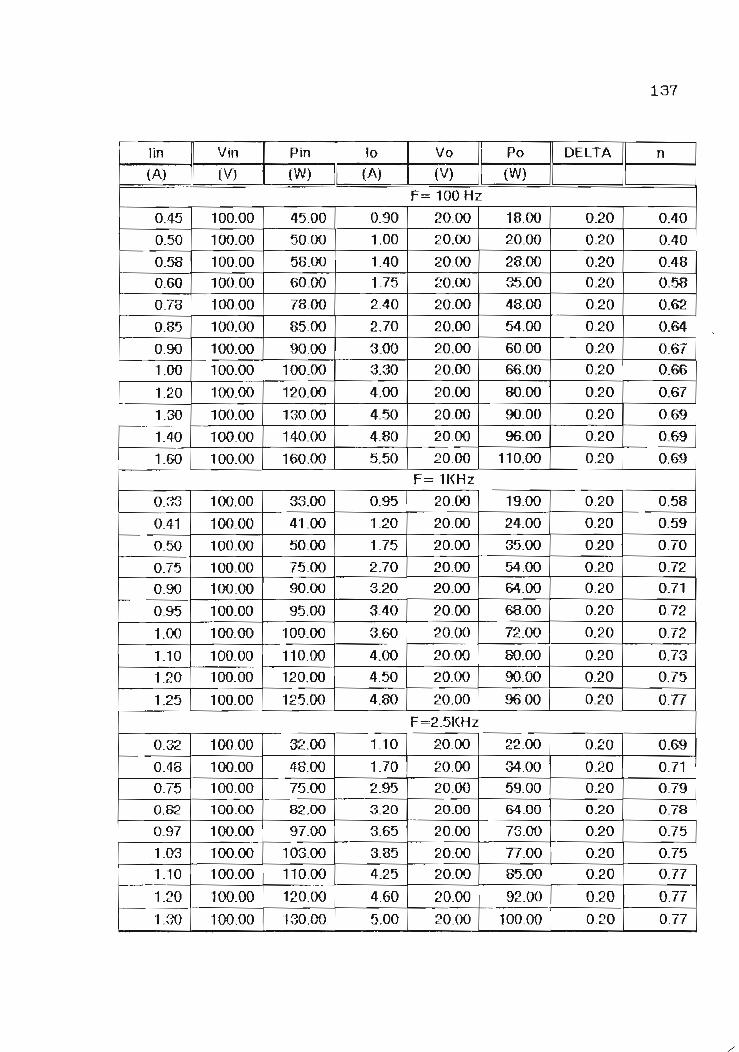
137
lin
(A)
0.45
0.50
0.58
O.GO
0.78
0.85
0.90
1.00
1.20
1.30
1.40
1.60
0.33
0.41
0.50
0.75
0.90
0.95
1.00
1.10
1.20
1.25
0.32
0.48
0.75
0.82
0.97
1.03
1.10
1.20
1.30
Vin
(V)
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100-00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100,00
100.00
Pin(W)
45.00
50.00
58.00
60.00
78.00
85.00
90.00
100.00
120.00
130.00
140.00
160.00
33.00
41.00
50.00
75.00
90.00
95.00
100.00
110.00
120.00
125.00
32.00
48.0075.00
82.00
97.00
103.00
110.00
120.00
130.00
lo
| (A)
0.90
roo1.401.75
2.40
2.70
3.003.30
4.00
4.50
4.80
5.50
0.95
1.20
1.75
2.70
3,20
3,40
3.60
4,00
4.50
4.30
1 10
1.702.95
3.20
3.65
3.85
4.25
4.60
5.00
Vo
(V)
F= 100 Hi
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
F= 1KHz
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
20.00
F=2.5KHz
20.00
20.0020.00
20.00
20.00
20.00
20.00
20.00
20.00
Po
(W)f
18.00
20.00
28.0035.00
48.00
54.00
60.0066.00
80.00
90.00
96.00
110.00
19.00
24.00
35.00
54.00
64.00
68.00
72.00
80.00
90.00
96.00
22.00
34.0059.00
64.00
73.00
77.00
85.00
92.00
100.00
DELTA
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
0.20
n
0.40
0.40
0.48
0.58
0.62
0.64
0.67
0.66
0.67
069
0.69
0.69
0.58
0.59
0.70
0.72
0.71
0.72
0.72
0.73
0.75
0.77
0.69
0.71
0.790.78
0.75
0.75
0.77
0.77
0.77
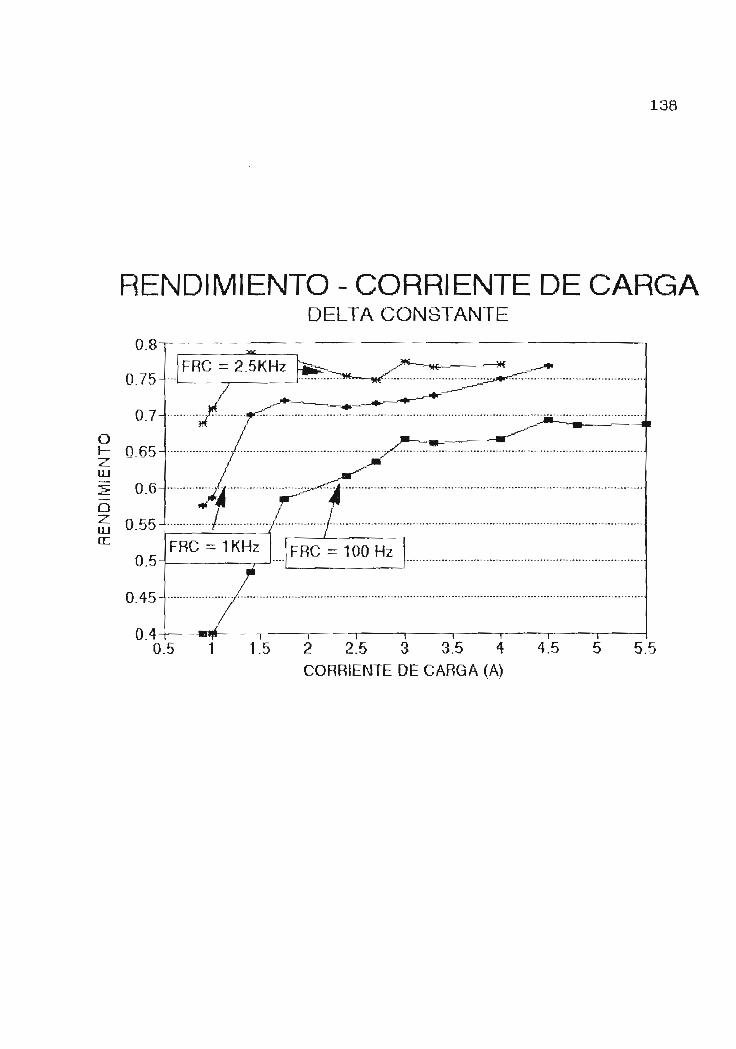
138
RENDIMIENTO - CORRIENTE DE CARGADELTA CONSTANTE
0.8
0.75-
0.7-
OH
UJ
Q
te
0.5-
0.'
/jM^-
•^
FRC = 1KHz FRC _
0.4-1 »4-0.5 1 Ts 2 23 3~ Í5 4 Í5 5 5.5
CORRIENTE DE CARGA (A)
139
De las curvas de rendimiento versus relación de trabajo,
rendimiento versus corriente de carga, para valores de
corriente de carga constante y relación de trabajo constante,
se puden extraer ciertas conclusiones:
El rendimiento del equipo aumenta cuando se aumenta la
relación de trabajo 6, la corriente de carga o la
frecuencia de operación del troceador, por lo tanto,
para no tener muchas pérdidas en el sistema hay que
tener presentes los rangos adecuados de los parámetros
anteriores.
Con estas curvas se comprueba efectivamente que conmutar
los transistores darligton a baja frecuencia (100 Hz. ) ,
da como resultado un bajo rendimiento ya que no se está
aprovechando la velocidad del semiconductor, y para este
caso las pérdidas estáticas son mayores que las
dinámicas, se otiene un gran rizado para la corriente de
salida del troceador.
A partir de una relación de trabajo de 0.3, las curvas
de rendimiento versus relación de trabajo 6, para
corrientes de carga de 3A y de 4.5A presentan un
rendimiento mayor al 85%, el cual se puede decir que es
aceptable.
En las curvas de rendimiento versus corriente de carga,
para relación de trabajo constante, se observa que para

140
6 = 0.2, en el mejor de los casos, el rendimiento es del
73%, cuando para 6 ~ 0.6 y para 5 = 0.9, el rendimiento
siempre es mayor que el 80%
En las curvas de rendimiento versus relación de trabajo
y rendimiento versus corriente de carga, para diferentes
valores de frecuencia, se observa, que desde 6 = 0.3 y
para frecuencias de 1 y 2.5 KHz- se tienen rendimientos
mayores al 75%
3.4 COMPROBACIÓN DE LA LINKALIDAD DEL SISTEMA:
Para comprobar la linealidad de los modelos en los
cuadrantes I y II, se han efectuado las respectivas
mediciones y elaborado gráficos de la variable de salida en
función de la variable de entrada, los cuales se presentan a
continuación.
Se observa que el modelo general del sistema en los
cuadrantes I y II difiere del modelo de la máquina en un par
de constantes que constituyen cada una el modelo del
troceador y el modelo del control de los interruptores

141
Vin100.00
100.00
100.00
loo.oíT1
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
100.00
Ve
10.509.03
8.21
7.G6
6.77
6.16
5.61
5.08
4.52
3.98
3.23
3.01
2.59
2.13
1.92
1.75
1.25
0.93
Vo
0.00
5.10
10.40
16.30
27.00
34.50
40.50
47.00
55.00
60.00
65.00
72,00
77.00
30.00
35.00
36.00
94.00
95.00
DELTA10.00
0.05
0.10
0.17
0.27
0.35
0.41
0.47
0.55
0.60
0.65
0.72
0.77
0.80
0.85
O.S6
0.94
0.95
DELTAS0.13
0.24
0.32
0.36
0.44
0.49
0.53
0.58
0.62
0.67
0.73
0.75
0.73
0.32
0.34
0.85
0.90
0.92
DELTA VS. VOLTAJE DE CONTROLPRIMER CUADRANTE
<UJ,Y
(Th-
IUU
OU<t_jIDIL
1 ~
0-6
t,O.Q"
0.5"
0.4"
0.3'
0 £
0. 1
0t
*£, - -""%
*** *- -*t" *íír™*H¡r CURVA IDEAL
^m "Si.
SM "*: ".— X ~*-,»ffr....m .-
CURVA MEDIDA p^ --. ->1 1 »v ' "^
M. -v
"*^-
"m ""--v,-m,- . "*
I I t i I r 1 1 1 T — ' '
) 1 2 3 4 5 6 7 8 8 1 0 1
VOLTAJE DE CONTROL í'V>
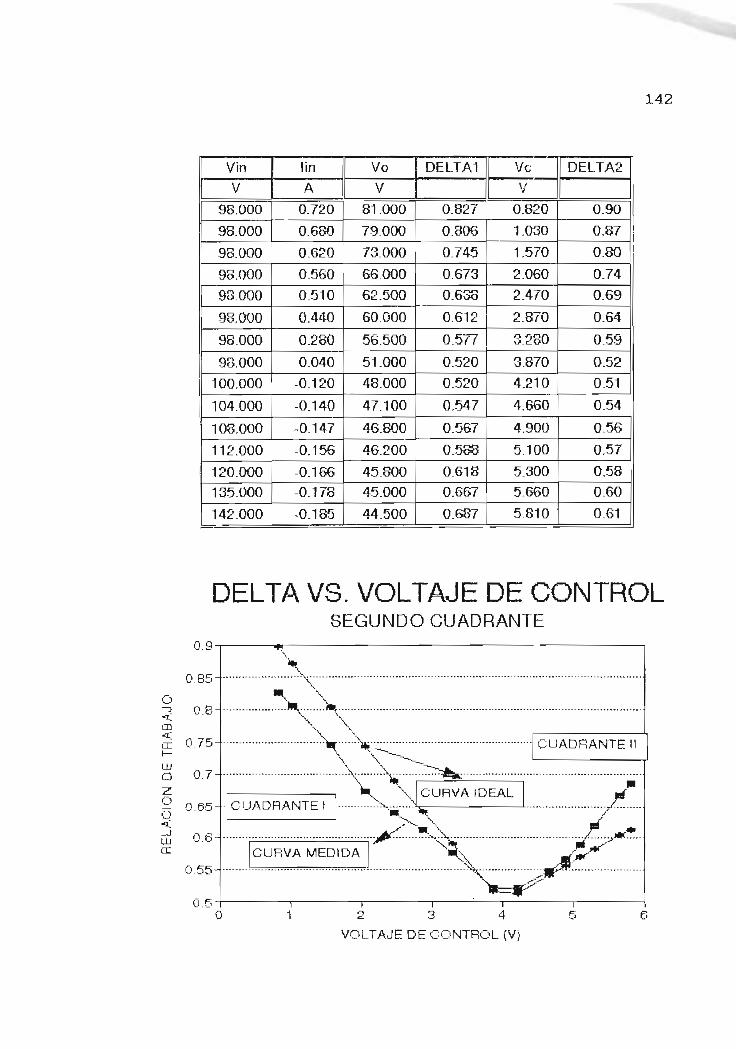
142
VinV
98.000
33.000
.98.000
98.000
98.000
98.000
98.000
98.000
100.000
104.000
108.000
112.000
120.000135.000
142.000
Un
A
0.720
0.680
0.620
0.560
0.510
0.440
0.280
0.040
-0.120
-0.140
-0.147
-0.156
-0.166-0.1 7S
-0_185
Vo
V
81 .000
79.000
73.000
66.000
62.500
60.000
56.500
51.000
48.000
47.100
46.800
46.200
45.SOO45.000
44.500
DELTA1
0.827
0.806
0.745
0.673
0.633
0.612
0.577
0.520
0.520
0.547
0.567
0.588
0.613O.G67
0.687
Ve
V
0.820
1.030
1.570
2.060
2.470
2.870
3.280
3.870
4.210
4.660
4.900
5.100
5.3005.660
5.810
DELTA2
0,90
0.87
0.80
0.74
0.69
0.64
0.59
0.52
0.51
0.54
0.56
0.57
0.58
0.60
0.61
DELTA VS. VOLTAJE DE CONTROLSEGUNDO CUADRANTE
n 9'
0.85'
Oi 0.8-LÜ-X*
LÜ
2O
uJ o.ícr
CUADRANTE!!
CUADRANTE::lJRVA
" ! » _ _ * * !
•f
¿
CURVA MEDIDA-i
2 3 4
VOLTAJE DE CONTROL (V)
IV

143
CAPITULO IV: RESULTADOS Y CONCLUSIONES.
En este capítulo se analizarán las conclusiones sobre
los circuitos experimentales, se hará un análisis técnico
económico del proyecto así como de las respectivas
recomendaciones tendientes a realizar mejoras futuras.
4.1 CONCLUSIONES SOBRE LOS CIRCUITOS EXPERIMENTALES
De las pruebas realizadas al convertidor DC - DC, se
puede extraer ciertas conclusiones:
En el control simultáneo:
En un mismo período de trabajo del troceador operan los
dos transistores con pulsos de activado complementarios.
Para este caso, a más de la operación de ambos
transistores, existe la operación de los diodos que
están entre colector y emisor de cada transistor. Los
instantes de operación de cada uno va a depender de la
relación de trabajo aplicada. Aquí se puede decir que
existen fracciones de período de trabajo en las que la
máquina de trabaja como motor y otras fracciones de
período en las que la máquina trabaja como generador;
pero al hablar de un período completo de operación hay
que observar el valor medio de la corriente de carga
para afirmar con certeza cual es el cuadrante de
operación.
144
- El cambio de cuadrante de operación se realiza en forma
suave mediante el potenciómetro que controla relación de
trabajo. El cambio de cuadrante se observa teniendo en
cuenta la referencia de la corriente de salida; ya que
cuando la máquina trabaja como motor el valor medio de
corriente de salida está sobre la referencia y cuando la
máquina trabaja como generador el valor medio de
corriente de salida está bajo la referencia.
- Para este tipo de control hubo la necesidad de
introducir un circuito denominado "blanking time" y que
evita que ambos transistores del semipuente se puedan
activar en el mismo instante. Para nuestro caso, la
duración de este tiempo fue seleccionado para el peor de
los casos que fue la máxima frecuencia de operación;
para esta frecuencia, la duración del "blanking - time"
es aún imperceptible.
En el control no simultáneo:
- El cambio del primero al segundo cuadrante se realiza en
forma brusca mediante el selector de dos posiciones.
Aquí se deshabilita el control en el primer cuadrante de
forma total para dar paso al control de rizado el cual
es un circuito con autoproteccion, es decir, que los
valores de corriente de freno son ajustables. Cuando
querramos hacer el cambio de cuadrante del segundo al
primero hay que tener el potenciómetro de relación de
145
trabajo en mínimo para que no haya una corriente elevada
en el instante del cambio. En el caso de que haya una
corriente alta en ese instante actúa la correspondiente
protección de sobrecorreinte.
En este caso en un mismo periodo de trabajo puede estar
activo sólo uno de los transistores, aquel que hayamos
seleccionado.
En las dos técnicas de control:
- Las señales grafizadas en el tercer capitulo
correspondientes a corrientes de carga presentan ciertas
alteraciones lo cual se debe al muestreo mismo de la
señal análoga en el osciloscopio para luego ser enviada
al plotter. Mayor distorsión presentan aquellas señales
que son sensadas sobre resistencias de bajo valor.
Dichas resistencias podrían ser aumentadas en valor con
el objeto de mejorar la señal, pero con la desventaja de
que la potencia sobre dichas resistencias se ve
incrementada.
Se ha comprobado que el hecho de reducir la frecuencia
de operación del convertidor bajo los 500 Hz
aproximadamente tiene como consecuencia el incremento
notable del rizado de la corriente de salida. Por eso
existe la necesidad de conmutar los transistores de
potencia a frecuencias de 1 KHz o 2 KHz., donde la
corriente de salida es prácticamente plana.
146
El efecto de aumentar frecuencia de trabajo es análogo a
incrementar la inductancia de filtrado de corriente de
salida. Cuando se realizó la prueba sin inductancia de
filtrado hubo una cierta frecuencia a partir de la cual
si bajábamos más comenzaba la conducción discontinua.
Por lo tanto, podemos salir de dicha discontinuidad
aumentando frecuencia de trabajo o inductancia de
filtro. El incrementar la inductancia de filtro genera
mayor costo y volumen del equipo, por consiguiente nos
queda la opción de efectuar la conmutación a alta
frecuencia, pero sin perder de vista las pérdidas
dinámicas.
Al respecto de la eficiencia del equipo calculada, esta
fue evaluada en el tercer capitulo con 96%
aproximadamente para lo cual fue tomado en cuenta
únicamente las pérdidas en los semiconductores de
potencia, transistores y diodos, que son las mayores. A
ésto habría que agregar las pérdidas en las resistencias
de los snubbers, en el circuito de control y en los
elementos magnéticos que existen en el equipo.
La eficiencia del equipo medida, resulta menor que la
calculada ya que aquí se consideran todas las pérdidas
existentes en el sistema, y además podemos observar las
tendencias de las curvas al variar ciertos parámetros
como relación de trabajo, corriente de carga y
frecuencia de operación del troceador.
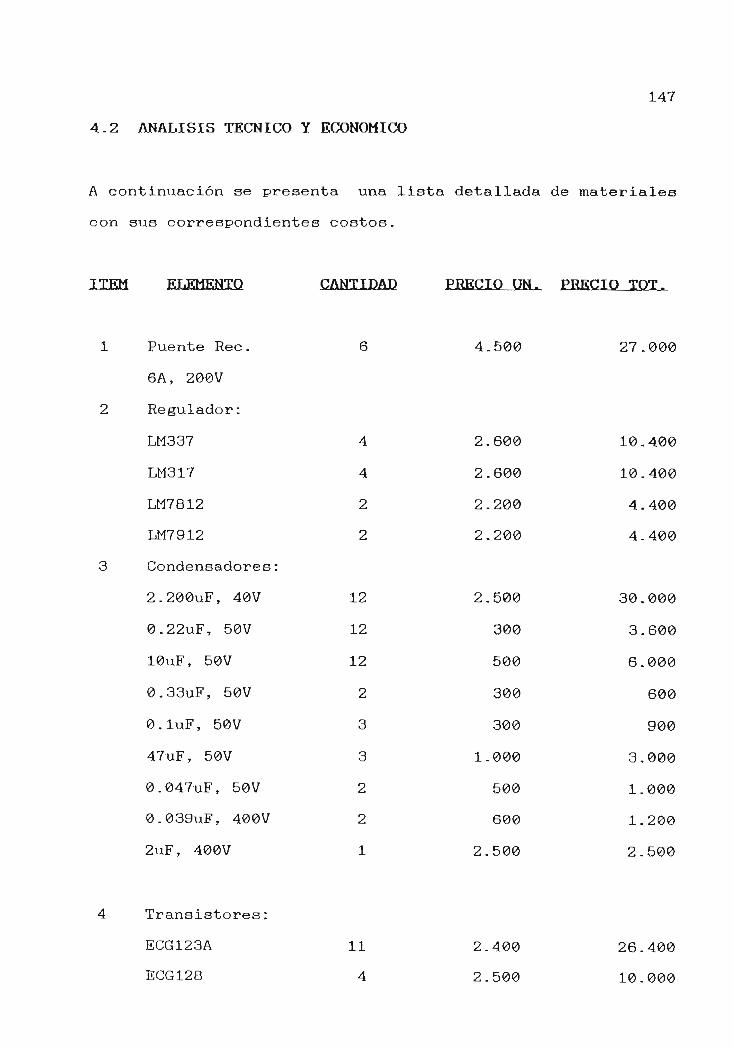
147
4.2 ANÁLISIS TÉCNICO Y ECONÓMICO
A continuación se presenta una lista detallada de materiales
con BUS correspondientes costos.
ÍTEM ERECIOJTQL.
1 Puente Reo.
6A, 200V
2 Regulador:
LM337
LM317
LM7812
LM7912
3 Condensadores:
2.200uF, 40V
0.22uF, 50V
10uF, 50V
0,33uF, 50V
0.1uF, 50V
47uF, 50V
0,047uF, 50V
0.039uF, 400V
2uF, 400V
4 Transistores:
ECG123A
ECG128
4.500 27.000
4
4
2
2
12
12
12
2
3
3
2
2
1
11
4
2.600
2.600
2.200
2.200
2.500
300
500
300
300
1.000
500
600
2.500
2.400
2.500
10
10
4
4
30
3
6
3
1
1
2
26
10
,400
.400
.400
.400
.000
.600
.000
600
900
.000
.000
.200
.500
.400
.000
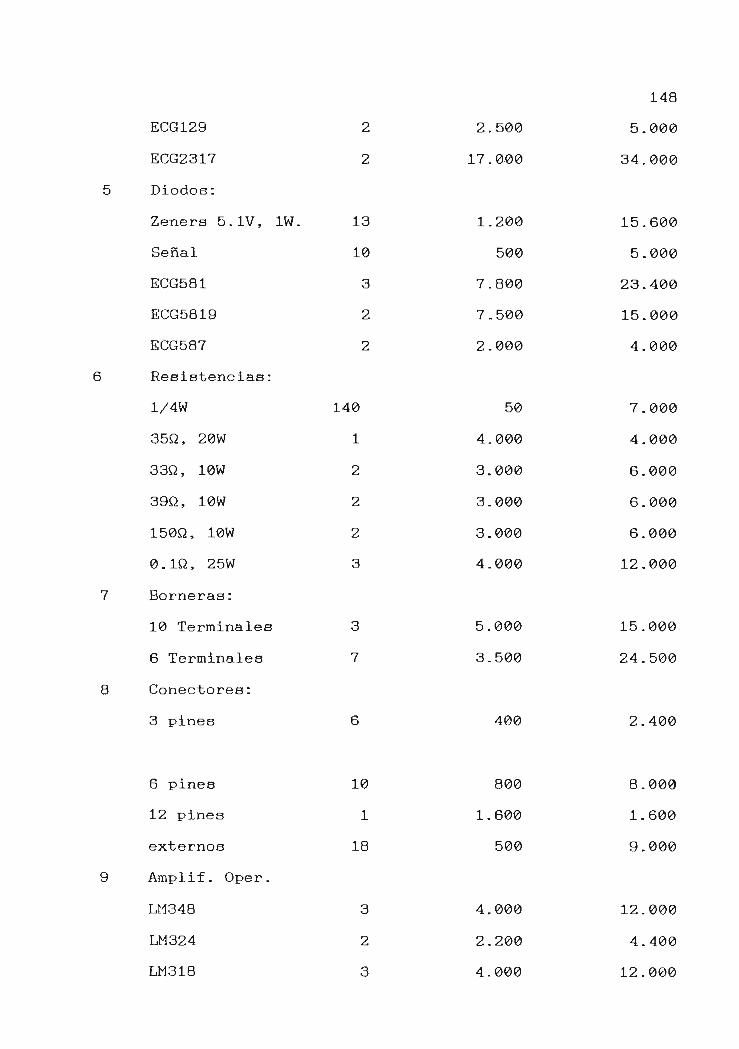
ECG129
ECG2317
5 Diodos:
Zeners 5.IV, 1W.
Señal
ECG581
ECG5819
ECG587
6 Resistencias:
1/4W
35Q, 20W
33Q, 10W
39Q, 10W
150Q, 10W
0.1Q, 25W
7 Borneras:
10 Terminales
6 Terminales
B Conectores:
3 pines
6 pines
12 pines
externos
9 Amplif. Oper.
LM348
LM324
LM318
2
2
13
10
3
2
2
140
1
2
2
2
3
3
7
6
10
1
18
3
2
3
2.500
17.0.00
1.200
500
7.800
7.500
2.000
50
4.000
3.000
3.000
3.000
4.000
5.000
3.500
400
800
1.600
500
4.000
2.200
4.000
148
5.000
34.000
15.600
5.000
23.400
15.000
4.000
7.000
4.000
6.000
6.000
6.000
12-000
15.000
24.500
2.400
8.000
1.600
9.000
12.000
4.400
12.000

LM319N
LM741
10 Inversor:
ECG40106B
11 Bilateral Switch:
ECG4066B
12 SCR
ECG5400
13 Optoacoplador:
ECG3087
ECG3083
14 Potenciómetros:
150K
1K
10K
100K
2.2M
15 Sócalos:
14 pines
8 pines
6 pines
16 Relés:
12V, 16A
12V, 8A
17 Leds
18 Portaleds
19 Transfor:
4
1
6.900
2.000
5.630
8.000
2.230
149
27.600
2.000
22.520
16.000
4.460
1
1
12
2
3
2
17
8
2
1
1
7
7
30.500
4.500
2.500
2.500
2.500
2.500
15.000
800
400
700
32.000
15.000
300
450
30.
4.
2.
5.
5.
7.
30.
13.
3.
i
32
15
2
3
500
500
500
000
000
500
000
.600
.200
.400
.000
.000
.100
.150
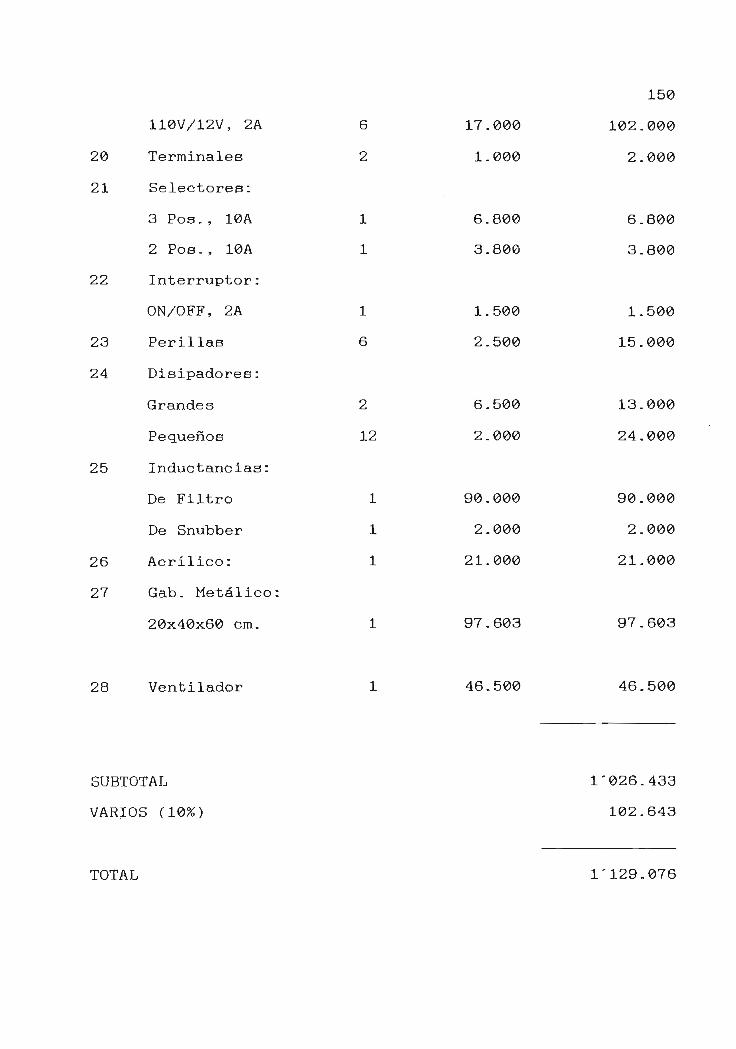
110V/12V, 2A
20 Terminales
21 Selectores:
3 Pos., 10A
2 Pos., 10A
22 Interruptor:
ON/OFF, 2A
23 Perillas
24 Disipadores:
Grandes
Pequeños
25 Inductancias:
De Filtro
De Snubber
26 Acrilico:
27 Gab. Metálico
20x40x60 cm.
6
2
1
1
1
6
2
12
1
1
1
17 . 000
1.000
6.800
3.800
1.500
2.500
6.500
2.000
90.000
2.000
21.000
150
102.000
2.000
6.800
3.800
1.500
15.000
13.000
24.000
90.000
2.000
21.000
97.603 97.603
28 Ventilador 46.500 46.500
SUBTOTAL
VARIOS (10%)
1'026.433
102.643
TOTAL 1'129.076
151
ANÁLISIS TÉCNICO:
En vista del precio de costo del equipo y aun cuando no se
haya tomado en cuenta la parte de ingeniería, resulta mas
rentable el diseño y construcción de un equipo de esta clase
con ciertos requerimientos muy particulares a tener que
adquirir uno mediante alguna casa fabricante conocida.
Esto constituye un argumento muy importante para la
construcción de este tipo de dispositivos para el control de
máquinas de DC ya que existen pocas casas proveedoras de esta
clase de productos, y aquellas que las hay presentan ofertas
que no están acordes con nuestra realidad económica, es asi,
que en una de estas casas proveedoras el precio por kilovatio
controlado, es decir, para una carga de 160 VDC y 8 A,
mediante conversor AC - DC en un cuadrante supera los 1.000
dólares.
152
4.3 RECOMENDACIONES:
En base de la experiencia adquirida con el desarrollo
del presente trabajo se pueden hacer ciertas recomendaciones
tendientes a efectuar mejoras futuras.
- Especialmente cuando se requiera construir un equipo
similar pero de mayor potencia, se requerirá por
seguridad desacoplar la parte de control de la parte de
potencia, por tanto se recomienda hacer el circuito de
control con una referencia diferente de las referencias
de los emisores de cada transistor. Para nuestro caso y
de acuerdo a las pruebas efectuadas al equipo y debido a
la potencia del mismo no resulta problemática esta
situación.
Es recomendable utilizar el microcontrolador para el
desarrollo de la parte de control mediante programación,
con el objetivo de facilitar el mantenimiento del equipo
y reducir la circuitería. El microcontrolador se
encargarla de generar los pulsos adecuados para activar
los transistores en cada control, de la lógica necesaria
para hacer operar las protecciones, asi como de la
selección de cada uno de los controles. Hacer que el
microcontrolador tenga pocas tareas hace que se lo esté
subuti1izando.
153
En vista de que el presente trabajo es de tipo
didáctico, la frecuencia de operación del troceador es
variable. Cuando en el futuro se quiera construir un
convertidor no didáctico, se recomienda que la
conmutación de los transistores de potencia sea a alta
frecuencia (2 KHz a 5 KHz) si se utiliza transistores
darlingtons, esto para reducir considerablemente el
rizado de corriente de salida. Hay que tener presente
también que efectuar conmutaciones a altas frecuencias
es ventajoso desde el punto de vista de reducir el
rizado de corriente de salida del convertidor, pero
desventajoso desde el punto de vista del propio
semiconductor, ya que es conocido que las pérdidas
dinámicas o producidas por la conmutación son mayores
que las pérdidas estáticas. Por lo tanto para una
operación óptima del convertidor hay que llegar a un
compromiso entre las influencias mencionadas.
El diseño de las redes snubbers conectadas a cada
transistor de potencia se recomienda realizarlas bajo
dos criterios; el primero consiste en un buen diseño
teórico, incluso existen ciertas herramientas como la
simulación mediante programas computacionales
existentes, y el segundo criterio es observar si los
resultados están dentro del rango esperado.
El buen funcionamiento del convertidor va a depender
mucho de un correcto diseño de la red snubber. Asi en el
snubber de encendido, hacer una buena selección de la
154
inductancia Ls asegura que la rapidez de crecimiento de
corriente es atenuada de manera que en el transistor de
potencia la conmutación se produzca dentro de la zona de
opración segura. En el apagado es conocido que las
pérdidas dinámicas o en la conmutación son criticas a
altas frecuencias. En cada transición de apagado del
transistor existe picos de sobrevoltaje que son
comparables al valor DC de la fuente primaria, dichos
picos son reducidos a un pequeño valor en presencia de
una snubber de sobrevoltaje bien seleccionado. Para
nuestro caso, el máximo sobrevoltaje obtenido en
presencia del snubber es del 8% o 9% del valor de
voltaje DC primario.
Para futuros trabajos similares de construcción de
convertidores DC- DC, se recomienda efectuar una
modelación y análisis por computador, en donde se
permita estudiar el comportamiento del convertidor ante
modos de conducción continua y discontinua mediante
algunas estrategias de control, ya sea por variación de
ancho de pulso durante el encendido o durante el
apagado. Luego de esta etapa de prediseño se debería
pasar con cierta seguridad a la selección de los
diferentes componentes del sistema. Con este seguimiento
se puede ahorrar tiempo y costo del equipo.
Debido a que la corriente de linea es de tipo
pulsatoria, existe contenido armónico de dicha corriente
155
que puede causar serias interferencias con sistemas de
comunicación, para lo cual se recomienda en el futuro la
construcción de un filtro adecuado en la entrada del
troceador.
156
[1] Lander Cyril., POWER ELECTRONICS, Me Graw Hill Book
Company, Great Britain, 1986.
[2] Mohán N. / Undeland T.M. / Robbins W.P., POWER
ELECTRONICS: CONVERTERS, APPLICATIONS AND DESIGN, Jhon
Whiley & Sons, New York, 1989.
[3] Bird B.M. / King K.G., AN INTRODUCTION TO POWER
ELECTRONICS, Jhon Wiley & Sons, New York, 1983.
[4] Leonhard W., CONTROL OF ELECTRICAL DRIVES, Springer -
Verlag, Berlín - Heidelberg, 1985.
[5] Dewan S.W. / Slemon G.R, / Straughen A., POWER
- SEMICONDUCTOR DRIVES, Jhon Wiley & Sons, Toronto, 1984,
[6] Rashid M. H., POWER ELECTRONICS, CIRCUITS, DEVICES AND
APPLICATIONS, Prentice - Hall International Inc., New
Jersey, 1988.
157
[7] De la Viesca C., CONVERTIDORES AUXILIARES PARA
FERROCARRILES, Marcombo, Boixareu Editores, Barcelona,
1985.
[8] Sebastián J. / Aparicio J.L., CIRCUITOS DE POTENCIA PARA
CONVERTIDORES CC/CC CON TRANSISTORES, Marcombo, Boixareu
Editores, Barcelona, 1985.
[9] . Poveda A. / Martínez L,, MODELACIÓN Y ANÁLISIS POR
ORDENADOR DE CONVERTIDORES CONMUTADOS CC/CC, Marcombo,
Boixareu Editores, Barcelona, 1985.
[10] Trevor L., CONTROL STRATEGIES FOR PWM DRIVES, IEEE
Transactions on Industry Applications, vol. 1A-16, No.2
March/April 1980.
[11] Harnden Jr. / Golden B., STEADY STATE INVESTIGATIONS OF A
CHOPPER FED DC MOTOR WITH SEPÁRATE EXCITATION, IEEE
Transaction on Industry and General Applications, vol.
IGA, pp 101-108, Jan/Feb. 1971.
158
[12] Harnden Jr. / Golden B., DESIGN ANALYSIS OF MULTI-PHASE
DC-CHOPPER MOTOR DRIVE, IEEE Conference Record of Fifth
Annual Meeting of Industry and General Applications Group
pp. 587-595, 1970.
[12] POWER SEMICONDUCTOR DATA BOOK, Volume 1, POWEREX, Inc.,
Pennsylvania, 1987.
[13] ECG SEMICONDUCTOR MASTER REPLACEMENT GUIDE, Phillips ECG,
Inc.., October, 1987.
[14] MOTOROLA POWER DATA BOOK, 3a. Ed. , Motorola Inc., U.S.A.,
1982.
[15] LINEAR DATA BOOK, National Semiconductor Corporation,
1980.
[16] Fitzgerald A.E. / Kingsley C. / Umans S., MAQUINAS
ELÉCTRICAS, Me Graw Hill Inc. U.S.A., 5ta. Ed. México
1992.
[17] Kosow I., CONTROL DE MAQUINAS ELÉCTRICAS, Prentice Hall
Inc Englewood Cliffs, New Jersey U.S.A., 1977.

159
[18] Burbano F., Sistema Didáctico para el Control de la
Máquina de DC en dos cuadrantes utilizando troceadores,
Quito, E.P.N., 1987.
[19] Morales G., Sistema de Control para la Operación de una
Máquina de DC en cuatro cuadrantes., Quito, E.P.N.,
1986.

ANEXO X
MANUAL DK USO
DK USO
El encendido del equipo tiene cierta secuencia, la cual
debe ser seguida para evitar algún posible daño.
Debemos tener presente primeramente que tipo de carga se
va a conectar al equipo, si es un motor de DC con excitación
independiente, carga R - L, carga R, o un motor de DC con
conexión serie.
Para el caso de que la carga sea un motor de DC con
excitación independiente con datos de placa ya mencionados, hay
que hacer la elección a través de un selector de dos posiciones
que se encuentra en una tarjeta ubicada en la parte inferior
derecha del equipo. Hay que hacer la conexión de voltaje de
campo a los respectivos terminales externos para de esta forma
sensar si existe o no campo. En el caso de que rio exista campo,
o si el voltaje de campo es menor que un voltaje mínimo
calibrado, la armadura estará desconectada y no habrá el
peligro de embalamiento del motor.
Cuando querramos hacer uso de los otros tipos de carga ya
mencionados, el selector de la tarjeta interna debe estar en la
otra posición ya que ahora no existe el riesgo del embalamiento
del motor por pérdida de excitación.
Teniendo en cuenta el paso anterior procedemos a la siguiente
secuencia:
- Se conecta primeramente el cable de control a la red,
procedemos a encender el control a través del switch de la
parte inferior izquierda, el cual tiene un indicador
luminoso interno color tomate.
- El encendido del control se puede dar aun cuando esté
conectada o no la fuente primaria de DC, ya que como aun
no hemos elejido ningún control en particular, los
transistores de poder estén apagados.
Hay que tener presente que la conexión de la fuente de DG
primaria debe ser en la polaridad correcta. En el caso de
que el operador por equivocación conectase la fuente de
DC primaria con polaridad invertida, no se cierra un
contacto que alimenta al semipuente. Esta protección
existe en vista de que puede ocurrir un cortocircuito de
la fuente de DC primaria a través de los diodos que están
entre colector y emisor de cada transistor. Para este
mismo caso de conexión de polaridad invertida, se activa
un led de indicación.
Podemos ahora seleccionar el control que deseemos a través
del selector de tres posiciones ubicado en la parte
central del equipo. Moviendo el control de dicho selector
hacia la izquierda, seleccionamos el control simultáneo,
la parte central del selector indica estado de apagado de
cualquier control. Moviendo el control del selector hacia
la derecha, seleccionamos el control no simultáneo el cual
a su vez consta de un selector de dos posiciones para
efectuar la conmutación entre el cuadrante I y II.
- Una vez seleccionado el control, procedemos a chequear loe
pulsos de control que comandan las bases de los
transistores con las respectivas referencias.
Control Simultáneo:
Cuando querramos observar el efecto del control
simultáneo, seguimos la secuencia de encendido indicada,
pero teniendo en cuenta que el potenciómetro de relación
de trabajo esté en mínimo, con el fin de tener un arranque
suave de la máquina. Para este caso la carga debe ser
activa y siempre teniendo en cuenta el mismo sentido de
giro. Para este control, existen además los potenciómetros
de frecuencia para variar la frecuencia de chopeo de los
darlingtons de poder hasta 2RHz.
Para los instantes de período de chopeo en loe cuales
existe regeneración, por precaución hay que poner carga
resistiva (focos) en paralelo con la fuente primaria de
DC.
Control No Simultáneo:
Con la misma secuencia de encendido indicada, procedo a
seleccionar el cuadrante de operación mediante el selector de
dos posiciones. Si elijo cuadrante I, sólo va a operar el
transistor superior del semipuente, chequeo los pulsos de
control y procedo a arrancar la máquina desde delta mínimo para
tener arranque suave. Para este caso la carga conectada es
pasiva. Si elijo el cuadrante II, sólo va operar el transistor
inferior del semipuente, la carga deber ser activa y se dispone
de dos potenciómetros para regular Imín e Imáx, es decir,
Ifrenado. Para este caso la fuente primaria de d.c. no tiene
sentido conectarla y mas bien cuando haya regeneración es
preciso tener conectados carga resistiva (focos) a los
terminales de la fuente primaria de DC especialmente cuando
esta fuente provenga de un convertidor AC - DC ya que existe el
riesgo de que los condensadores internos se carguen demasiado
cuando está produciéndose la regeneración. Estes focos no son
necesarios en el caso de que la fuente primaria de d.c.
provenga de un banco de baterías, ya que la regeneración
serviría para cargar dichas baterías.
Indicadores:
Indicación de Voltaje DC bajo: Existe un led de indicación de
voltaje DC bajo, el cual se encenderá hasta 45 VDC de valor de
fuente primaria; para voltajes mayores, el led se apaga, lo

cual indica que es el voltaje mínimo de operación del
troceados.
Indicación de Polaridad Invertida: Se activa en caso de que el
operador conectase con polaridad invertida la fuente de DC
primaria. Esto evita que haya un cortocircuito franco a través
de los diodos que están entre colector y emisor de cada
transistor de poder.
Indicación de Sobrevoltaje: En el caso de que sobrepasemos el
voltaje máximo de troceo del chopper que es de 150 VDC, se
encenderá este led. Cuando suceda esto se abrirá un contacto
que alimenta al semipuente, dejando sin voltaje DC al
semipuente y haciendo que el voltaje sobre la carga sea cero.
Indicación de Voltaje DC Primario: Este indicador está en la
parte inferior izquierda del equipo, y nos indica cuando está
presente la fuente de DC primaria.
Para explicar con mayor claridad todo lo anterior, se
muestra a continuación la foto 5, que indica la disposición
frontal del equipo con el objeto de apreciar la respectiva
ubicación de los componentes del panel de control.

Foto 5„ Panel frontal del equipo
ANEXO
DIAGRAMAS CIRCUÍTALES
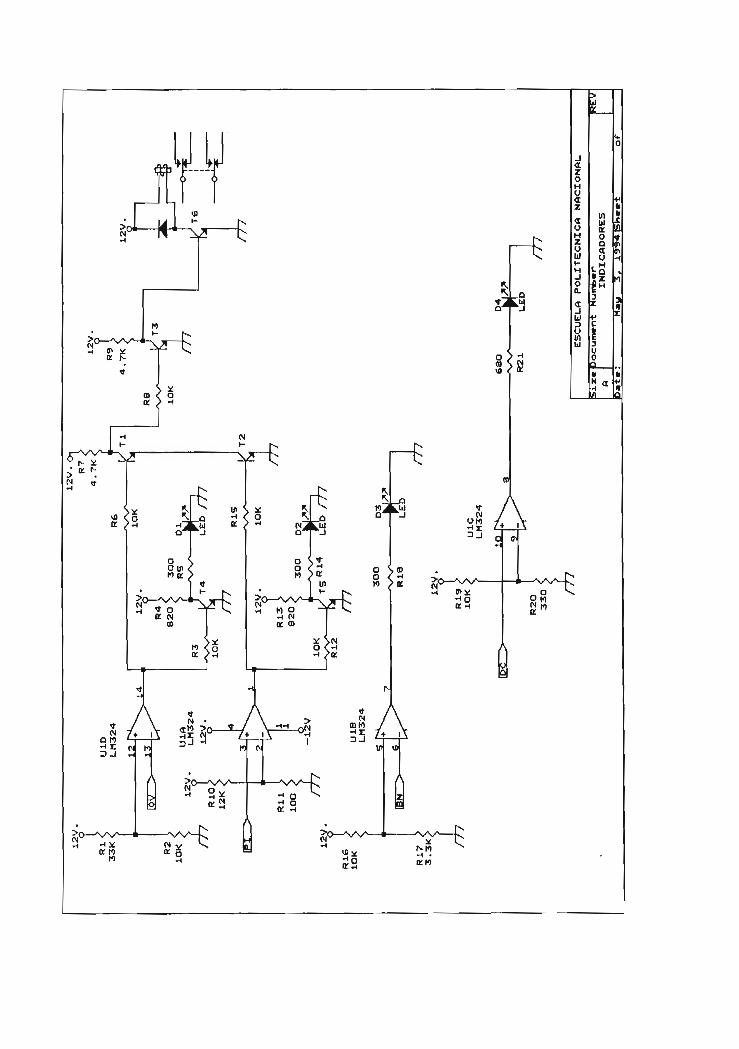
12V
.
12V
.
rhE
SC
UE
LA
P
OLIT
ÉC
NIC
A
NA
CIO
NA
L
Do
cu
me
rvtN
um
fa«
rINDICADORES

^7
ES
CU
EL
ft
PO
LIT
ÉC
NIC
O
NflC
ION
ftL
tnt
Num
b«r-
CIR
CU
ITO
D
E
CO
NT
RO
L
SIM
ULT
AN
EO
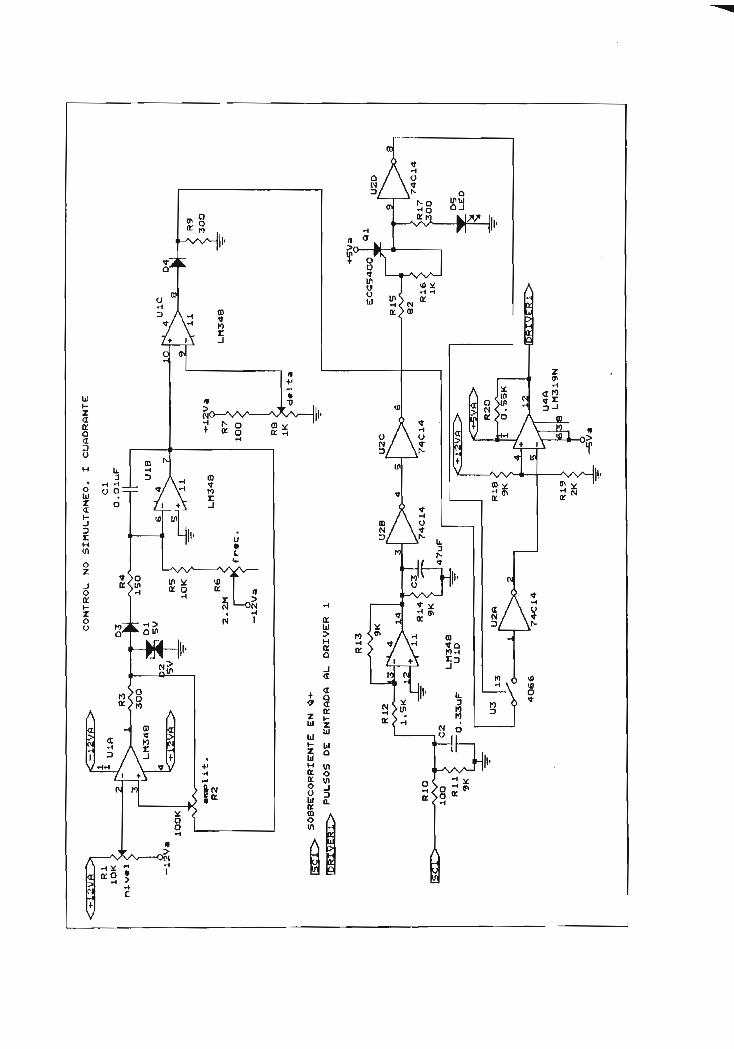
CONTROL NO SIMULTANEO, I CUADRANTE
Cl
O.OluF
SOBRECORRIENTE EN
•&-*•
PULSOS DE ENTRADA AL DRXVER 1
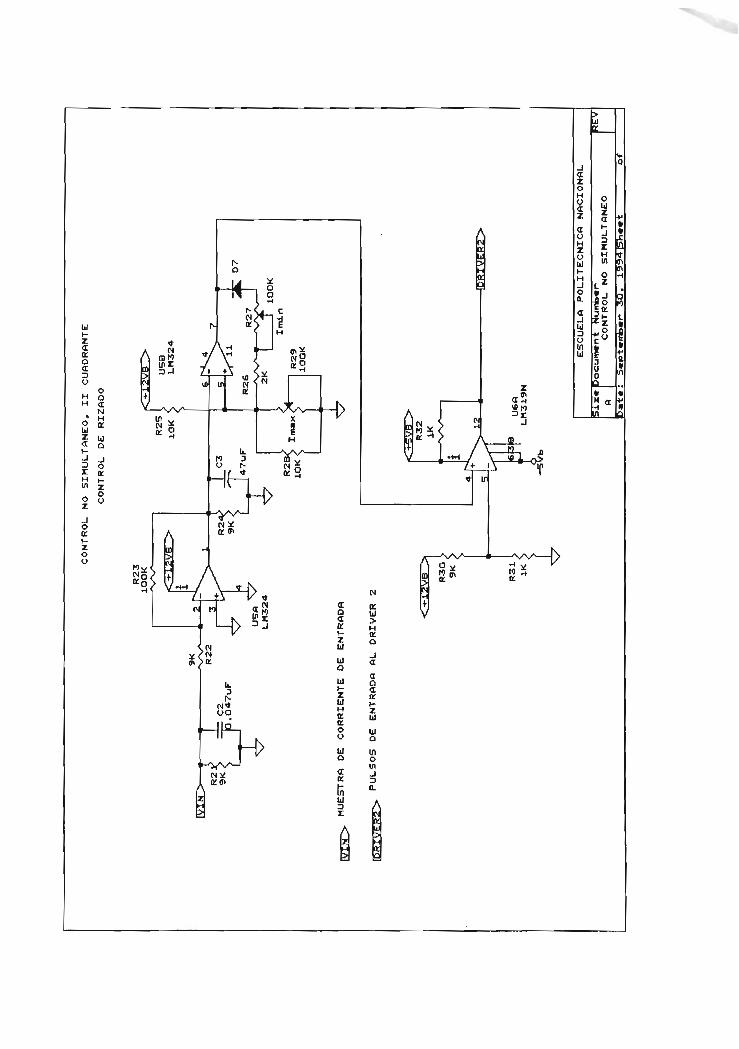
CO
NT
RO
L N
O
SIM
ULT
AN
EO
, II
C
UA
DR
AN
TE
CO
NT
RO
L
DE
R
IZA
DO
IS/l
N
>MUESTRA DE CORRIENTE DE ENTRADA
IDR
IVE
R2
>PULSOS DE ENTRADA AL DRIVER 2
ESCUELA POLITÉCNICA NACIONAL
Docum»n-fc CONTROL NO SIMULTANEO
f*
30,
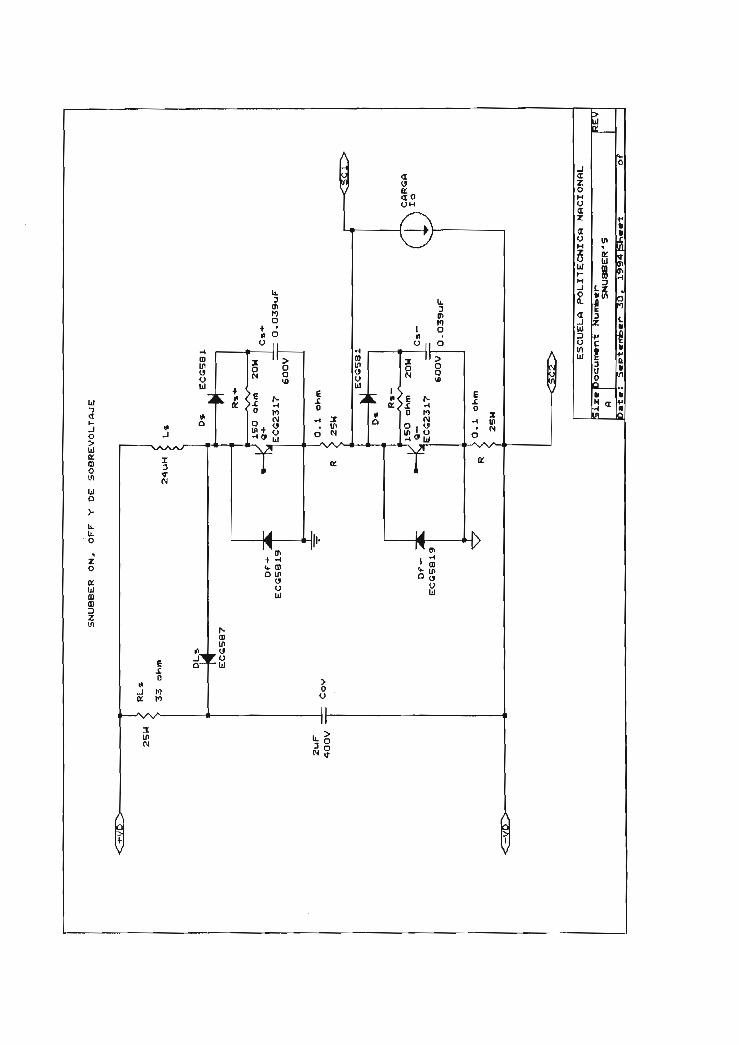
SNUBBER ON, OFF Y DE SOBREVOLTAJE
ESCUELA POLITÉCNICA NACIONAL
ocummt
SNUBBER 'S
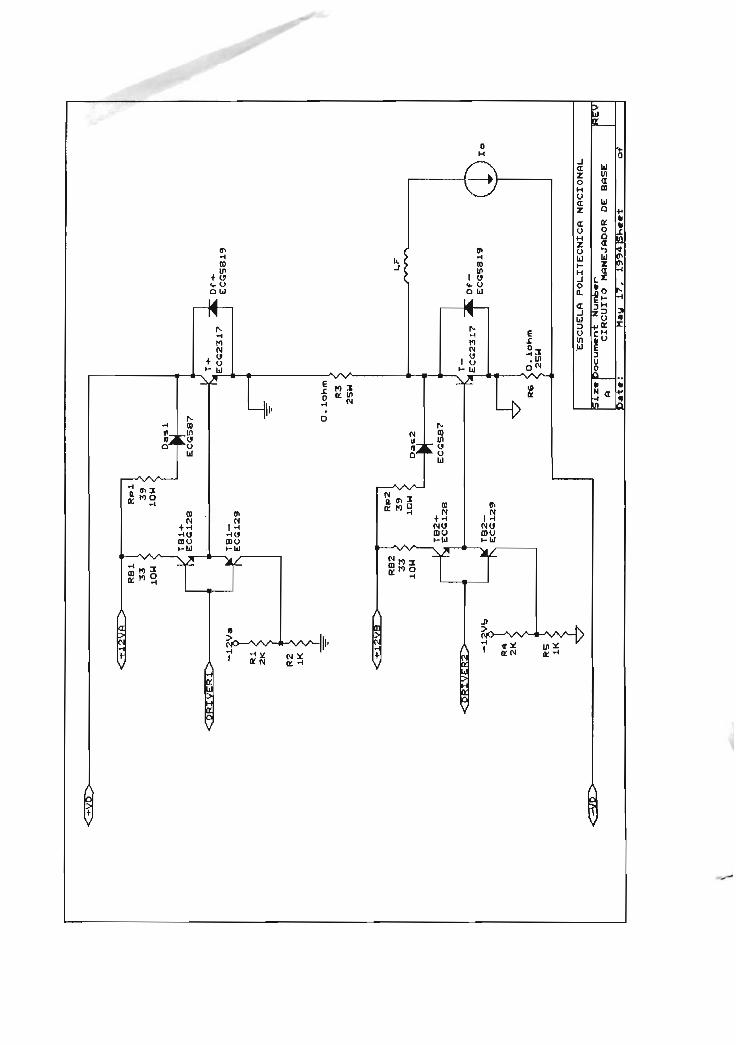
39
1OH
TB1-*-
ECG12S
ECCS87
<EEEZE52>
TB1-
ECCÍ29
O.
T-t-
ECG2317
Df-t-
ECGS819
\32SW
RP2J
39 <
TB2-«-
ECC12S
ECG587
TB2-
ECC129
LF
T-
ECG2317
ECG5S19
,0. iohm
, 25H
lo
ESCUELA POLITÉCNICA NACIONAL
DoeumiTvt Nurr4»*n
CIRCUITO MONEJADOR DE BASE
17, 1994 Shot
of

FUENTES DE DRIVERS, Y CIRCUITO DE CONTROL.
UlLM317
Cl
***!
OOuF
4OV
C2
=c
=
,
32 .
,
¿ R2
>
L >"
u— 0.22uF
!
^5OV
< <
i i>
Rl
> 2K
>
> RS
> 1OO
^ C3
'
luF
,sov 3
i i <3SI>
C 5. IV
e
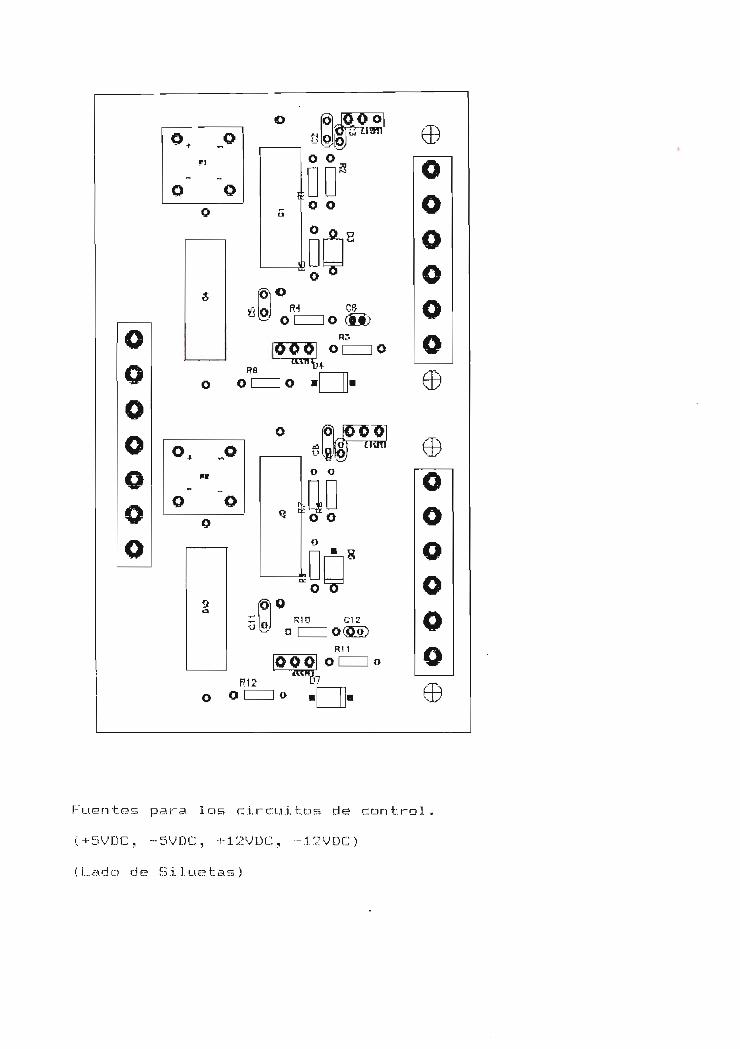
o o
o oO rt
O
R4_O i 1 O (O)
R9
O O í 1 Q •
ooo
o o
O O
o
oo
miO O l oí i o
R12O O CU o R
O
O
O
O
e
l::r n EÍ n t e s p a r a 1 o s c i. r c: t j i t; o s de c o n t r o 1
( +-5VDC , -5VDC , I-12VDC , .12VDC )
( I . . . a d c;> d e S i 1 u e tas)

F u e? n t e s p a r a 1 o s c: i r c u i. t. o s d e c o n
(i-^VDÜ , 5VDC , +12VDC , --12VDC )
(Lado Inferior)
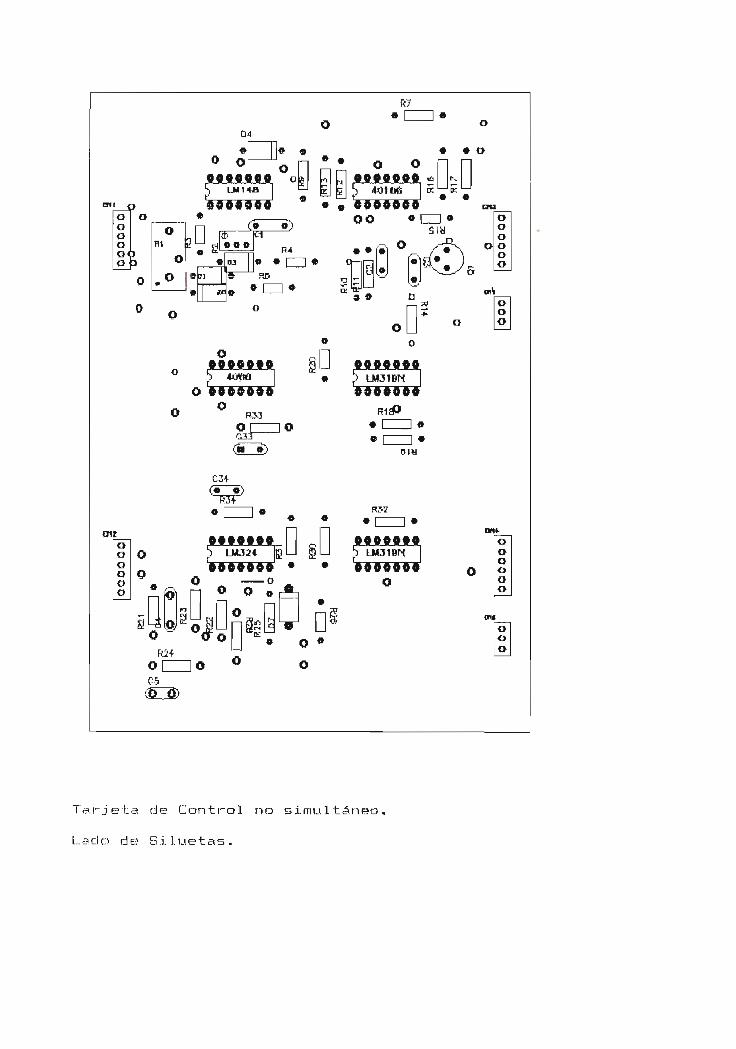
rt-
Sí-
3 ÍD 0
O
O
RZ
3
oO
0
ÍÍS
d
O
o o
r
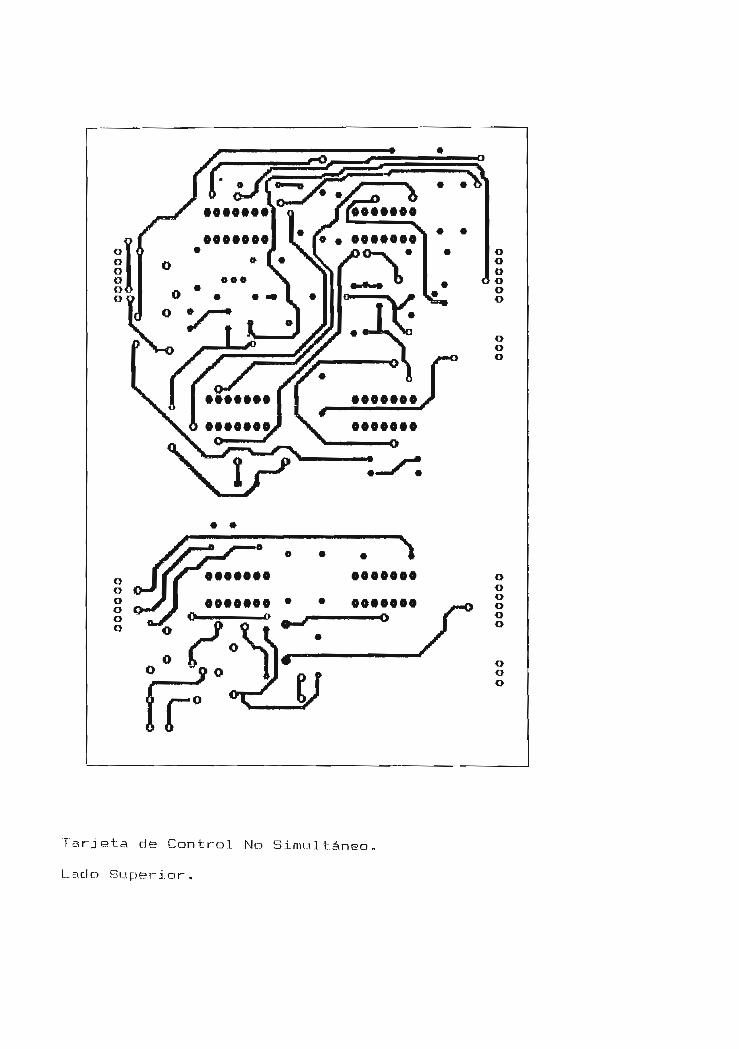
IB O _¡ rf T
OO
OC
OO
OO
OO
QO
ooo
oooo
oo0
00
OO
OO
OO
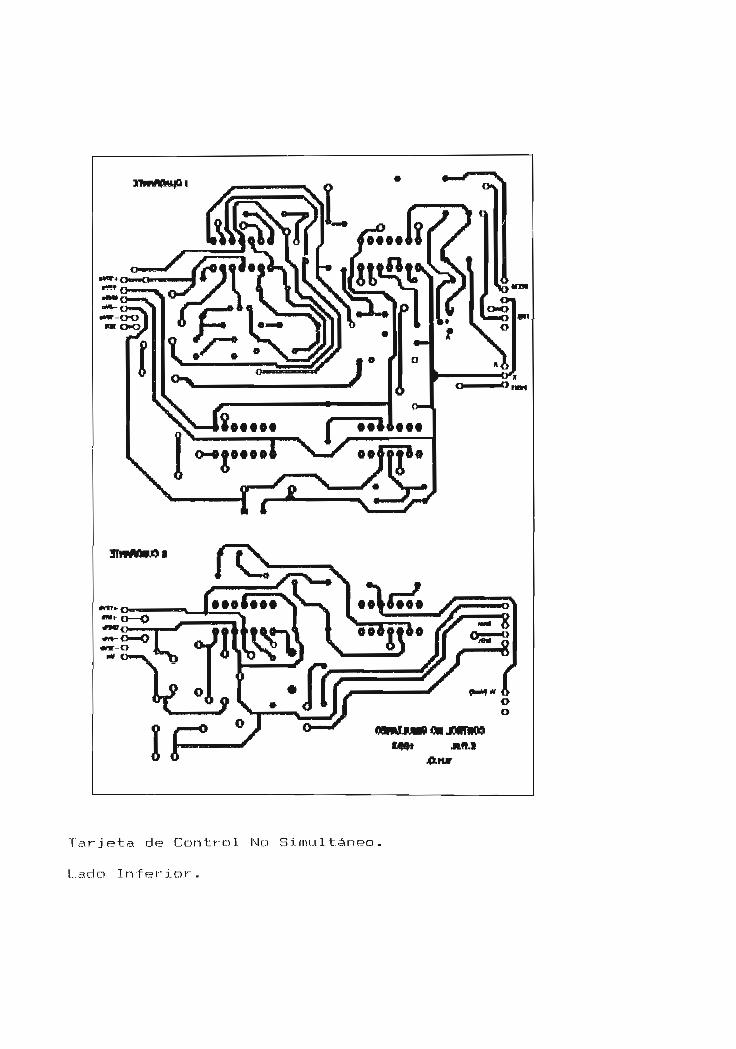
Tarjeta de? Control No Simultáneo,
Laclo Inferior.
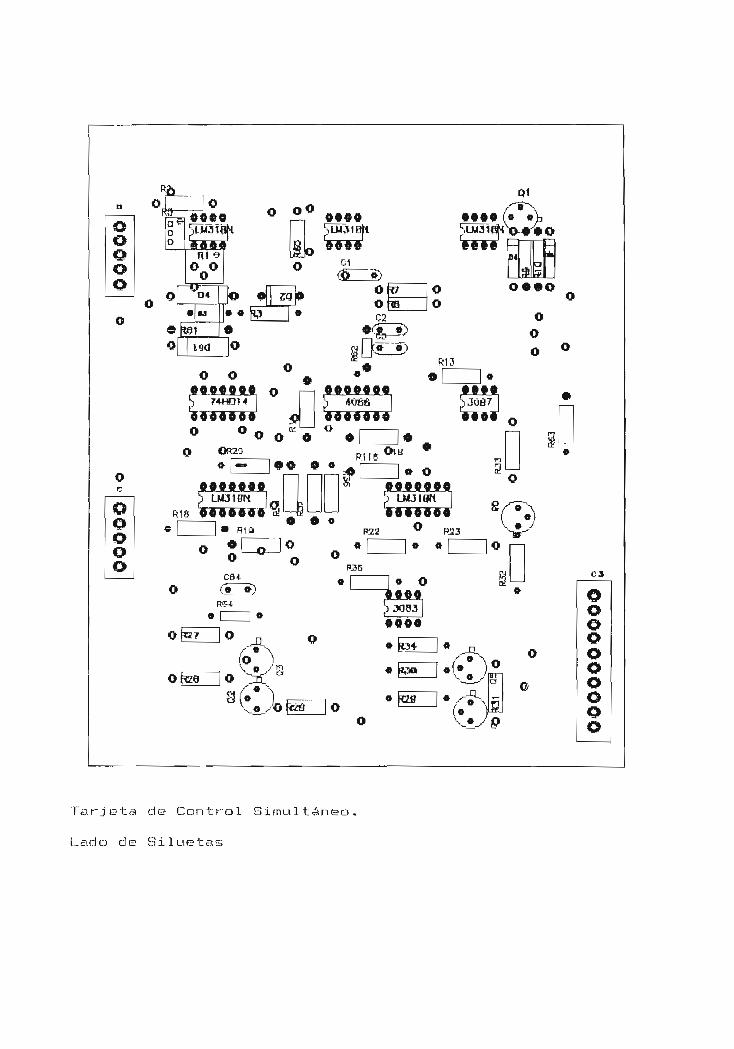
o
O
OO
O o
íí!*O Oo
9999S U-MtlK
o
o0 "D*w ~3*_lo
*M
Hb o
oD
O O ~ ft *4444444 o r-l *M*444S 74-HpM - *«wt
4444444O O
,
O OR20O o O
ORué 0ltí
R18 9999999 3
«moIL-O-J0 O
9449 (o oh3Ui31flNxMMH>
OO
oo
4444S.1ÍWI7
«
O o
CS4-R3E
O
o
»)
9999999° R33
* O
r»l~»"'
o9999
» EvT~(o
o feg 1 o jí c'3f.*)
»(« )
t .-"-Q-,(•
O
e
OOOooooooó
a r" j e t a d e C a n t r o 1 S i m u 11 & n e o ,
.. a d í::) el e S i 1 u e t a s
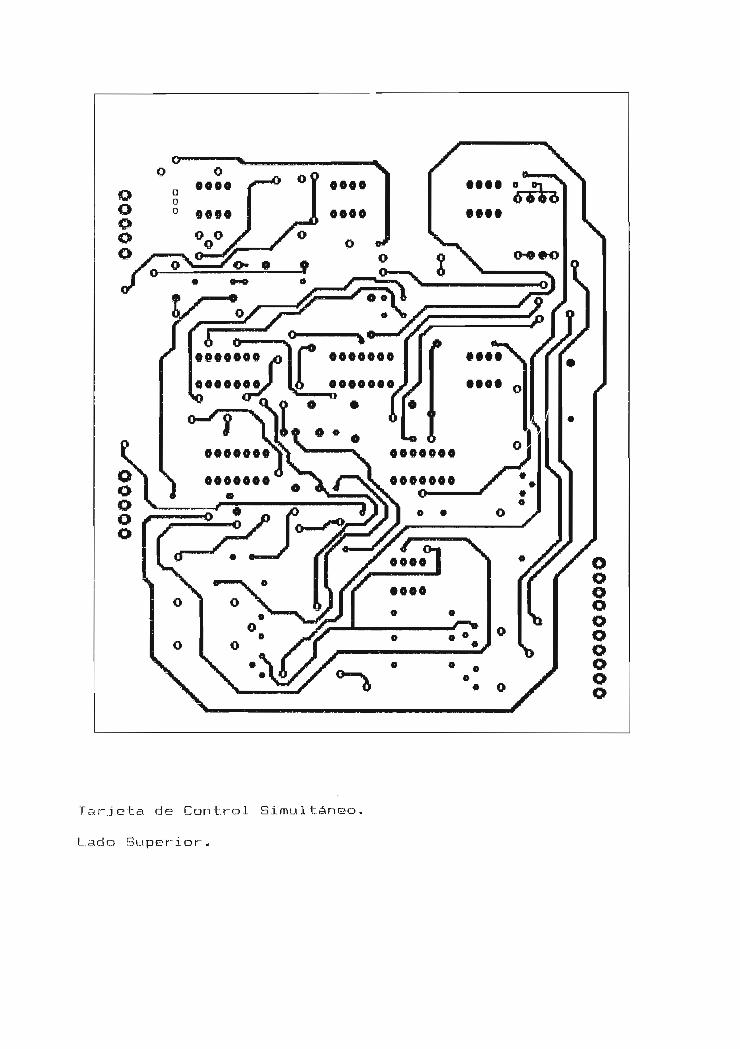
• o T ..Á a d n 9 e* p e ' ~|
• o a u y :v T n uj T cj \. j:). u o ;j a p t? :.\. a f _,f e j
0000
u » 0000
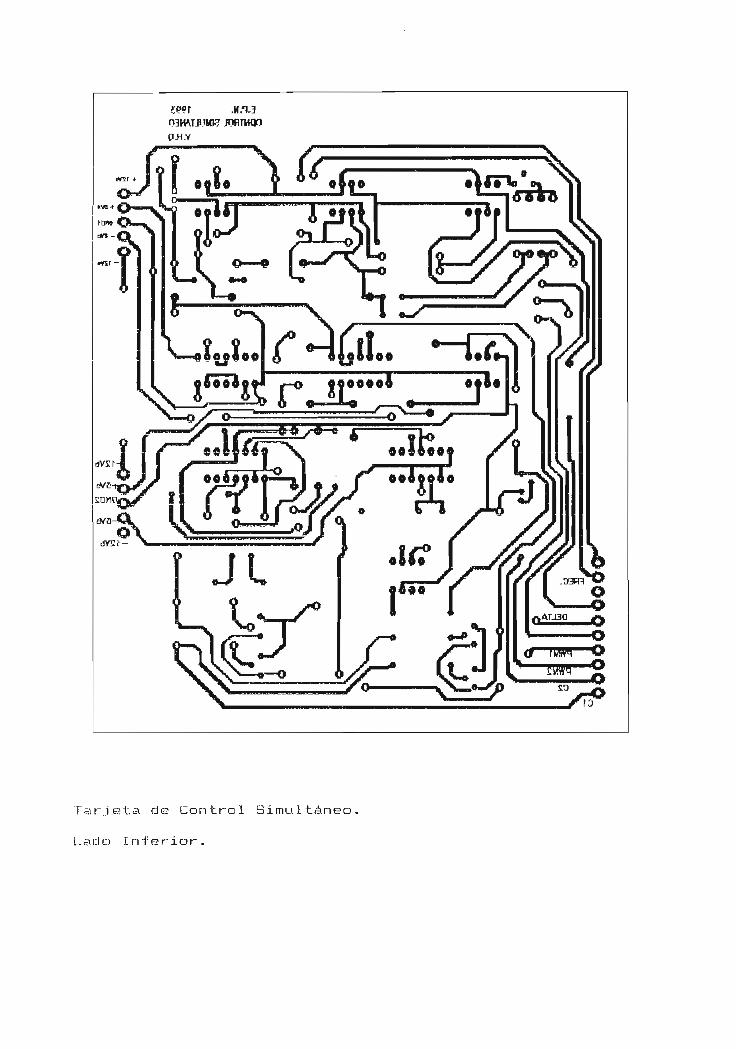
oamrjwn? JORIWOOP.HY
Z -QN~""* v——n*/*- í JJET y¡S, «i*a*f /1
a r j e 1: a d e C o n 11" o 1 S i m u 11 á n e a .
.ado I nf Brior .
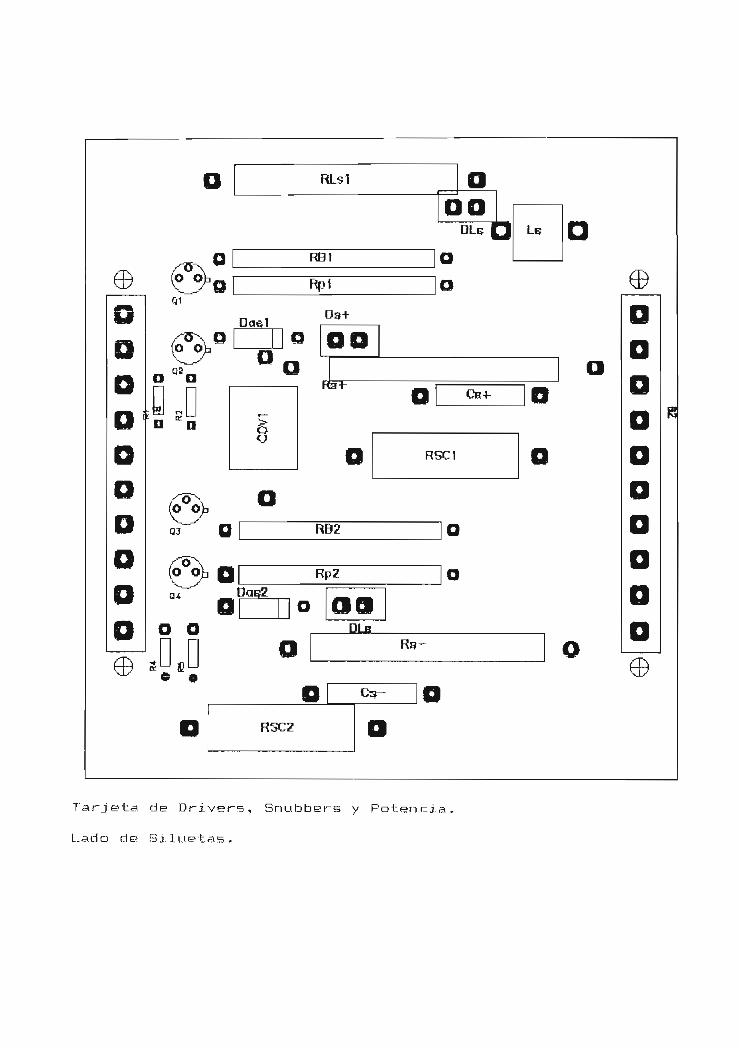
RUI o00
Of \y? * » o
R5C2
7 a r. j e? t a d e Drivers., B n u ta b e r B y P o ten c i a
L. a d o de B i 1 u e t a B -
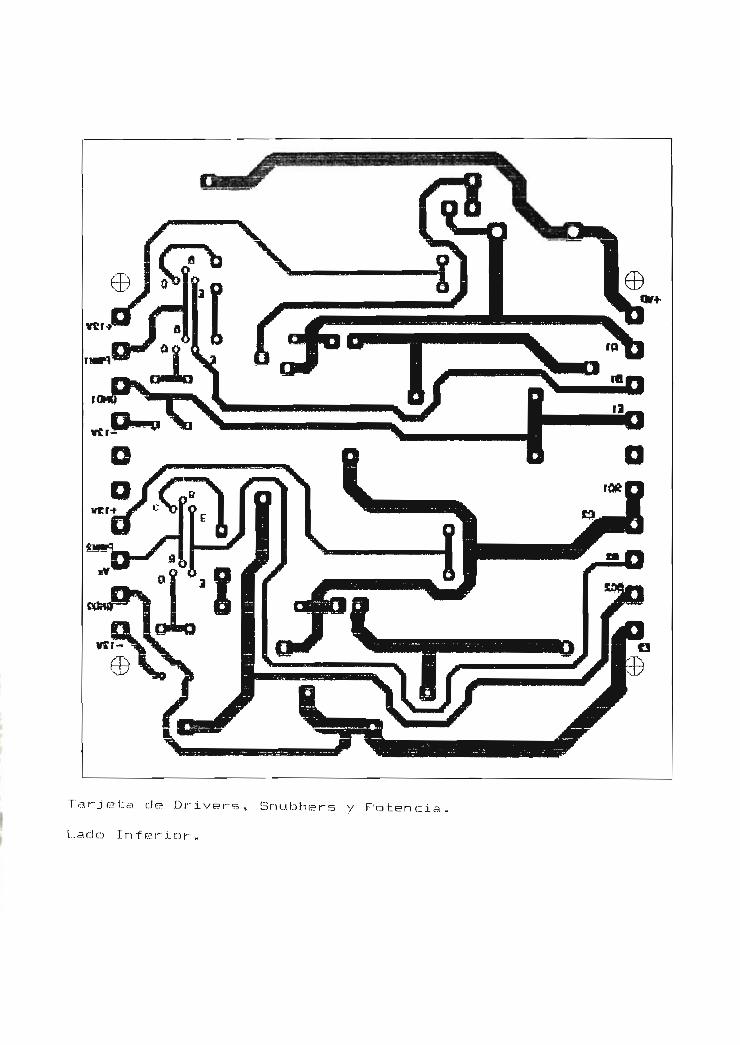
" -JOT^iaj. u i o pe
e T -3 u a 4 o ,_| X s j a q q n u 3 " B ..,i a A T .,i Q a p e:) a r ..i e
ANEXO
O/VCXONES UTX
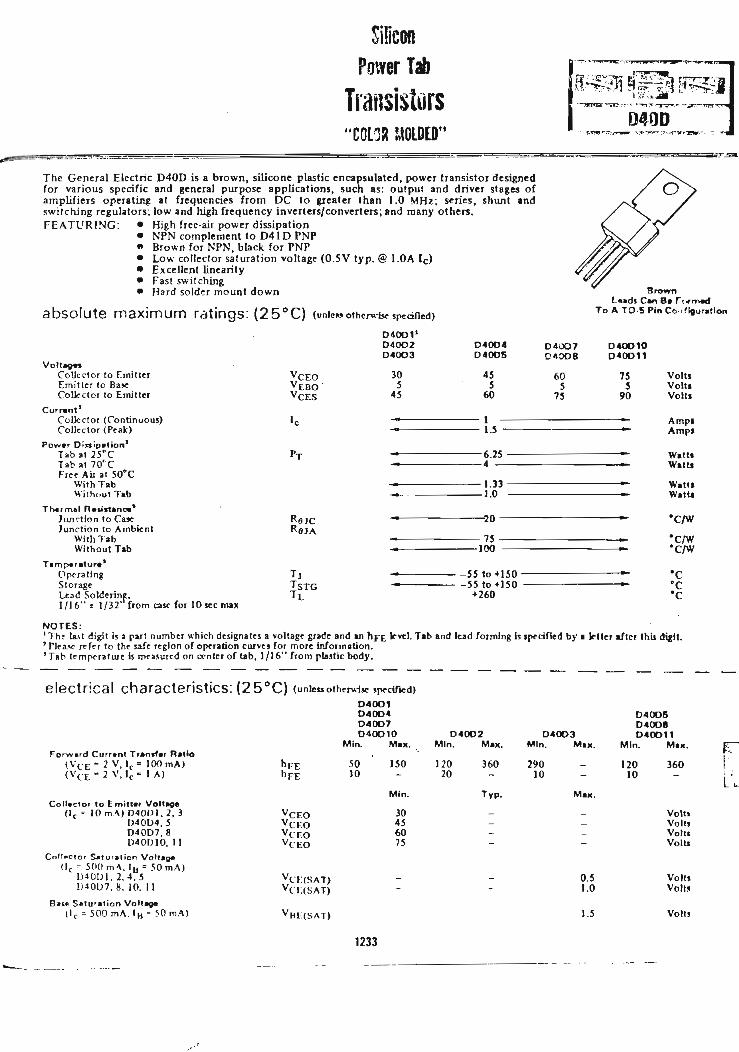
Power Tab
Traíisisturs"C013R SÍOLDED" '..W--~:rrr*m
The General Electric D40D is a brown, silicone plástic encapsulated, power tiansistor designedfor various specífíc and general purpose applícations, such as: output and driver sí ages ofamplifiers operating at frequcncies from DC to gieater than I.O MHz; seríes, shunt andswitching regulators; low and high frequency inverters/converters;and rasny others.FEATURING: • High free-air power dissipation
• NPN complement to D41D PNP« Brown for NPN, bíack for PNP• Low coílecfor saluration voltage (0.5V typ. @ l.OA Ic)• Excellent linearity• Fast switching• Hard solder mount down
absolute máximum ratings: (25°C) («me»othen*-i»spedfied)
CoUfdor to EmitterEmitter to BaseCollcctor to Emitter
Curnmt*CoUerfoi (Continuous)Collector (Peale)
Tab at 25"CTab at 70^CFrce Aii at 50°C
With Tab
VCEOVEBOVCES
Th«rm»l n»u«tanc«Jiuiction to CaseJunct ion to Ambtent
With TabWithoul Tab
OpcratingStorageLead Soldcrine.1/16" J 1/32' from case for 10 sec max
TjTSTG
D40O11
D4002D40O3
305
45
D40O4 D40O7D40O6 D40O8
45 605 5
60 75
] Q
75100
+ 260
D40D1OD40D11
755
90
*
M.
Srowni C»n R» I
To A TO-S Pin Crj iflgunrtlon
VoltsVoltiVolt*
AmpíAmpí
WattiWitU
W»ttl
•c/w
•c/w
*c*f
•c
NOTES:'Th; lajt digif is a parí numbei which designatcs a voltage grade and an hp£5 Deaw refer to íhc- safe región of opcration curves for more ínformation.'Tab tcmpcratuie ís measurcd on ccnter of tab, J/16** fiom plástic body.
Tib and lead forming is ipfdfied by • Irtter «fter this digít.
electrical characteristics: (25°C)
Forw»rd Curr«nt Tf»n«f»r R»tio
(VC F = 2 V, l c = 100 mA)( V C E « 2 V , I C » 1 A)
Col!*clor lo E millar Vo>t*g«(Ic - IOmA)O40DI,2, 3
1)4 OD4. 5D40D7. 8D40D10. 11
Coll fc iot S f l u ' n l h o o Vo'l*g«t(lc = 5(K) mA. I „ = 50 m A )
D 4 Ü D 1 . 2 , 4 , 5D40D7.8 , 10 , I I
I* SMifltion(lc = 500 mA.Ih = 50 mA)
h|:E
VCEOVCKO
CEO
"CKíSAT)
V H L ( S A T )
O40O1D40D4D40D7D40O10
Min.
5010
Max.
150
Min.
30456075
D4006D40OB
D40O2 D40O3 O40O11Min. M«x. Mtn. Max. Min. Max
120 360 290 - 12020 10 10
Typ. Max.
360
r
0.51.0
1.5
L v..
VolliVoltsVoltiVolti
VoltsVollS
Volts
1233
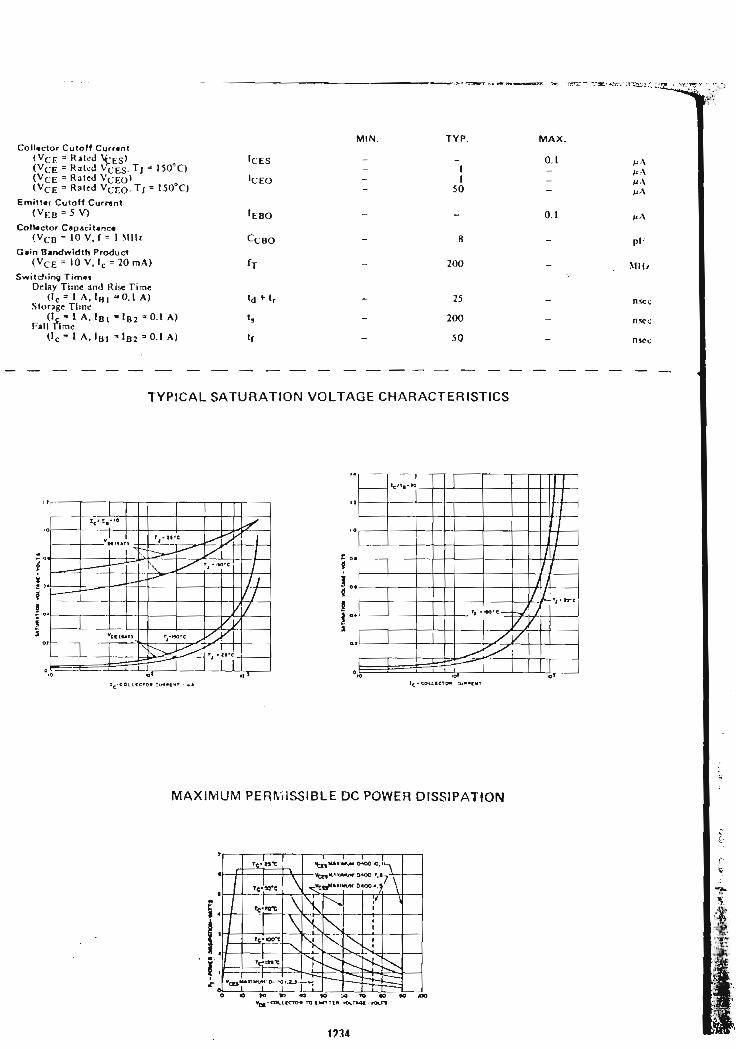
ColUctor Cutoff Curr«nt
<vCE * Rated V;Es)<VCE = Raied V C K S ,T j= 1 50* C)<VCE - Ratcd VCEÜ)(VCE = RateJ Vcro. T; = 150 C)
Emitt«r Co(off Curr^nt
Collvctor Capüctt^nc*(VCB = 10 V.f = ! MÍU
G»in Bandwidth Product
<VCE 3 10 V,lc = 20 mA)
Switcliíng TinnnDe la y Time an-l Rise Tirní
(lc»l A, IB| 3(>.l A)Storagc Time
(¡c- I A, 1B| -'82 -0.1 A)Falt fimc
( « e 3 ! A, lUi -ÍBI'0.1 A)
M)N.
ICES
•CEO
'EBO
CCBO
TYP.
I1
50
8
200
25
200
50
TYP1CAL SATURATION VOLTAGE CHARACTERISTICS
MAX.
0.1
0.1 MA
pl
MU/
nu-c
nscc
n«c
MÁXIMUM PERMISSIBLE DC POWER DISSIPATION
1714
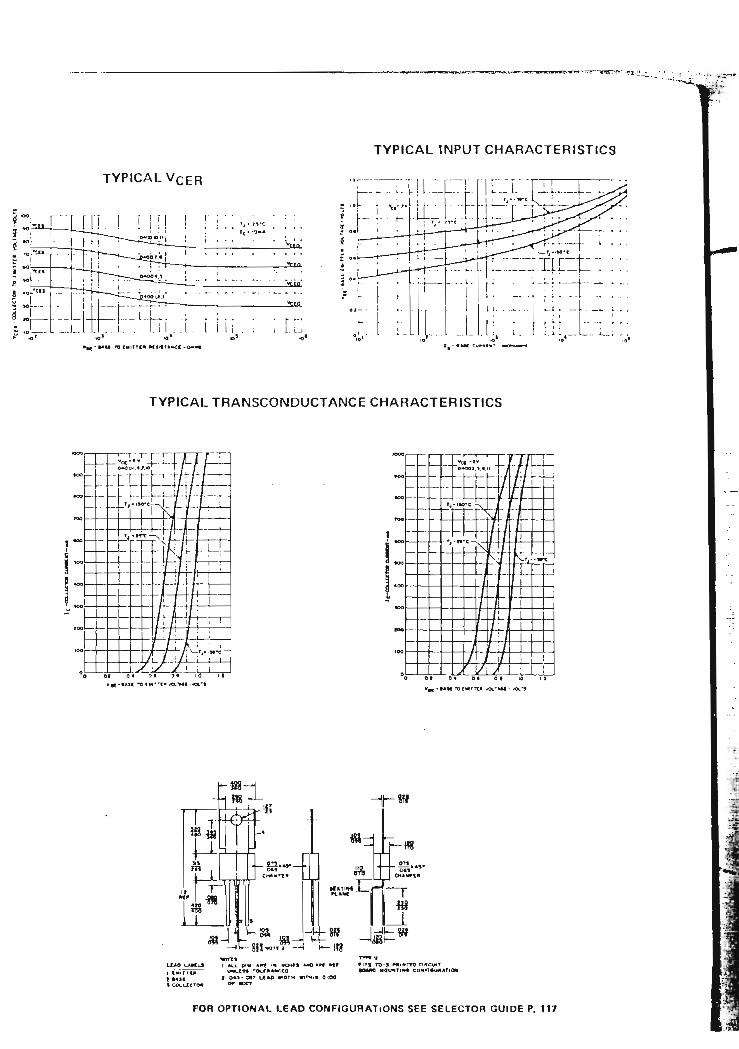
TYPICAL INPUTCHARACTERISTIC3
TYPICAL VCER
TYPICAL TRANSCONDUCTANCE CHARACTERISTICS
n
-1h%*
OTBÍL«TT^~>'"LLJ «"»*«
T«i
-fc-W J^hír-- .„ —H«SI—
• »tf »H> TO-J WtinT^
FOR OPTIONAL LGAO CONFJGURATiONS SEE SELECTOR CUIDE P. 117
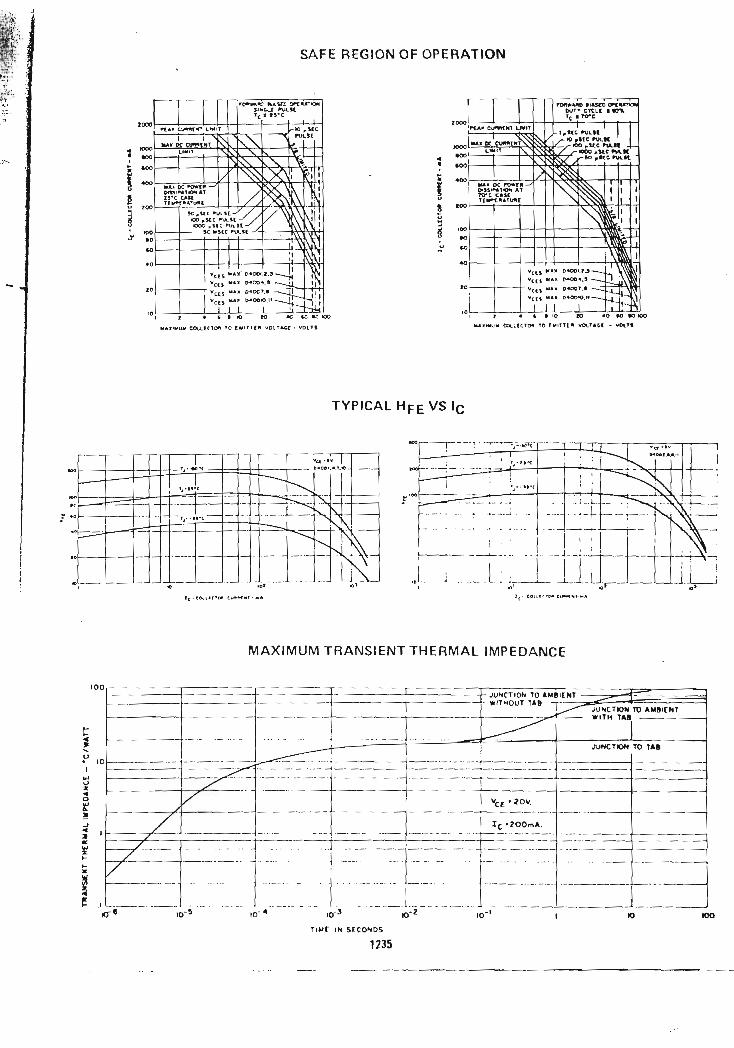
*r3F5r* TS&rr T^
SAFE REGIÓN OF OPERATION
TYPICAL HFE VS lc
MÁXIMUM TRANSIENT THERMAL IMPEDANCE
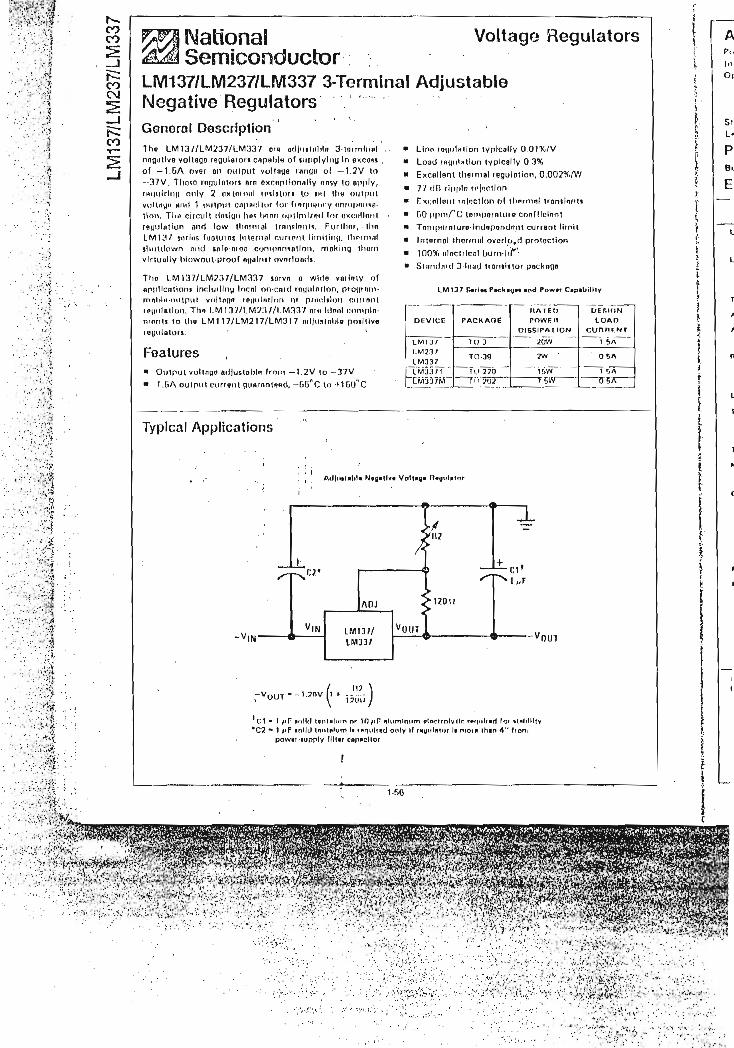
$$$$•§09co
co(N
00
NationalSemiconductor
Voltago Regulators
LM137/LM237/LM337 3-Term¡naI AdjustableNegativo RegulatorsGonoral DescríplionTho LM137/LM237/LM33/ o>n «djiutnliln 3-lttiinlnii|ndfliitlve vollano rngulfltors cnpnblH of supptyiny In excoí» ,of -1.GA ovar an oulput voltnyo rarut» o( — 1.2V to—37V. Thosn rmiulators Brn oxcnplionalty flnsv to opply,itn|ilii¡nil only '¿ .(ixli'intil icsblori VH mil ihw oulpulvoUnyd «mi 1 oil'plit copn^ltnr fiti1 (mt|1llllt(*y iintu|Htnn«-Iloit. Tlnt ciinuU it(nt()ii \\n* iwnn npUml/«(l («>r oxcitltmitreiuilntiun nnd low tlintrnol trnnslonts. Furihnr, . th«tMUU sorins fualuros Inlernnl ciurfut limllinn, ilmnii.'ilshiiuUiwn nnd snf«-nioo compnnsntlon, mnkinq itnirnvlrtuolly hloWOUt-proof nyulnit ovnrlomts.
Tlio LMUÍ7/LMÍ.17/LMn37 sorvn Q wliln vniiply ofBppHontion» Inclmllng loe ni on-cnrtl rofliilntlon, pto(ltn'"-mnlilti otiipnt voltnijrt roiiulitilfni or pr«i:l»lon currimiiVfiiilBllun. Thn I.M137/1.M7:W/I.M317 tito itlnnl cnmpltt-monts lo tlm LMU7/LM217/LM317 nil)iniiti»lo positivomyuloiors. ' '
Foatures* Outpul vollng» acljuütabln (rom -1.2V lo -37V» i .GA outptit current guaran leed, ~B5 C lo +1DU C
Lino r«it"lHiion typícally O 01%/VLoad roquíntiori lypicalty 0.3%
Excnllont thttmal regutnlion. 0.002%/W77 (IB ripplrj ft'ji'ntlnnÍKi;(t|l(Mit trt|crtlon of thr-imnl Ironiiint»
C.O piimrc IninporíiUiin confUclnntTtinipninture-indoponddiit citrrent litnitInterna! tliormul ovcrlo,d proituMíon100% i!l«ctiicol burn-in"'Sltiiulnitl 3-ltiad troniítlor packogo
tM P«:k*y« un»! Pow«r Cip«t)
LMKI/
LM237
LM33/
"LMjJ/M"
*OE
9
70
63
HA te»POWfiH
DISR1PA1ION
2ÓW
?w •
IbW
T 5W
UtfilON
tOAO
cunnENT1 5A
O S A
1 «i A05* —
Typical Applications
VOUT
-VnUT - -1.3RV 1x OUT
*C1 "" 1 f'P »«HH InnlMliiin or 10 f t T nlinnlniím elnrtrolvtlr nw|iiliiirí fm tinhll"C2 ™ 1 j'P «nlliJ innto'um I» n»r|ulf»d only If mgnliitr» !« nioiit thin 4" Irom
pow«T-füpply Mllar cnp«cUor
f

líco
'W|í|tt||<IAU UllKljOA U'JltilllUVi U'JíiVIU\Ul | IU1IM|ljDll I|IIM tW5IAM|l p*|3*,*f [ 1
U» «lljj U)U)J[)A HtJlIKI U| I
¿Uí OL
|OÜ H |H uní IPi í l ino « H> un |>um«Huui *| in)||U|nttm pu<i~| -uni | t l |nfluj |iiunui|| Joj tni|ii>:i||t:>"<li "MI '"('"" |iwiiino;> u<* 'i**i,* I- ..*, -'í
ju «ju t,8u>p«i) oeC-Ol P
. , y» "flwn:ittu cuí o L *ii«í 0,,CJUH *s U > Ü , V 1 £ -
mi y oí "'!' >") V I U"ii J»í j , .uait- '> U 5. a,,<
'/Na - J-'lü/\-
ipiíi-,, f ,«Unían.! GI.'-OL ""ti '"1 Vi Oí** •*•,M0£ P"« ¿Oí Oí f'"« í Ül ••. -.,
.11 [.un *í'., ^) :
AVÜ.
Wü,
WJ,,
. WÜ.
%UP ,
DI'
V ,
V
V
V
V : .
Vu>
Va1
X
s •Al"
A/%
A
A'
vi-
ví'
w% .
^ 1A»u ,
•
,
A/%
S 1,1 MU
e
S'll
*
,
"•: '
aOt ,
yi. o¿
LQQ
tKIC't-
ÍU£-l-
• B
OUI
VQO
P'l(id
i-uo
JÍ L
¿i(•
c e¿f
E 'U
¿i
ÜU
tÜÜ'U
OÍD
I/ 'U
uuc e
" S ' t
9'í
UU
cuU2
CÜÜ
UHÍ'l
«Sí 1
í
auCÜÜ'O
K'U
yl
U)'U
.]A1_
; • '
«u
uruyru
. yuti i
,.,
1 ' ; - .
' '
uoí-iC I É - I -
: ;
'1 '
• • •
Ltíi".
cSI
l
L
', 9
' 1
" uy
•jt)U
uut: i -«c-i
9
Oul
Cü'Ü1a u1ÍC
£00
KVW/ti
c e¿icuti
.,<.'« .i;uu üÜÍ'U
I/U
, BUi £ C
eV
3,cuuEÜ
Oí
ÍO'O
(líl£'i-
U'iC'l
¿
MU '
£i)0'U
E ü .
' U l 1 '
IÜU
JAIiftÍ~Í//CL
ÜU
, .
íil'Ü
v¿ u
su.í 3'1
. . . •
• ''
UUC'l-
«íí-l-
1
(
»
*rT
»G«>lJirj d
»Dri»j J.
wlurnunj X
(íf)«)l'jud K
JJtiun ooül 'O.^Cl - VJ '
J'ÍUl -TUVO
'HUÍl -l'Alíl-- J-'IOA
, • /HHÜl> l> /HUl 'ü ,<J Í -V l
UllSifMd d Pu* H
] ' «l«>iJBj_Lp.Jit x
, auí)Ct -!j.'AUV-|-l"0A NlA|
yüu>ij«j j puw H
, • • . . • . Nü»>tJii<i 4. U"" X
, j A9| >|J-00A -MlAI
' AÜI :> IJ^OA -^'A'
' ' /(ut' > i-^riüA - -N i A(
. . XV^¿>l^>Nl^ i
AS < lino AIA9>|inOAl
(C «l>-'N) 'XVWj > J.ÍIÜ| "~. V"J(J1
, , le-.oNl'Aü^linOA-H.A^X^
(C "'('Ni 'AOl- > 1' n^A -W'A l í> C
( ít-.'Ni D.X-VÍ
i XV^J,S'1|;>V"MÍL
• ; «i»d««ui'jlyí-vi
(¿ «"'Ni 'A9 <tin°Al
j i ie "t"Ni 'Ay •"> UnjíA|
i xvi\ s JnO| > v*"ui ''i 'ir " vii í •;' '1 (¿ «UiM)
' A( ) f> | l f lOA-NIA(> AEXW:- Vi
: SNÜI.UUNOÜ
.
«tej oí uoitaunr 'B I»IH<,J n,».
Am.'msu,,.,^..
""'u^'"-1-"'-
inüAí"%-^N^..v,,;,,
tlWI l ¡,J..>
• iui.Mn3p.viw.-*.
AlPl^S^'. — i..
U.P.Í«."*-llt*
uy „.-*,.,.
-"•'i»,% *-•»-.
! I-I., ,,,,,,.. ,,,, ..,.
; = ..MH^U.J ,„_..,i - "• ' • ' i
• Wdttj '^í .,
uai^^vuvd
uv %OÍH
iunui|Xtí|/v
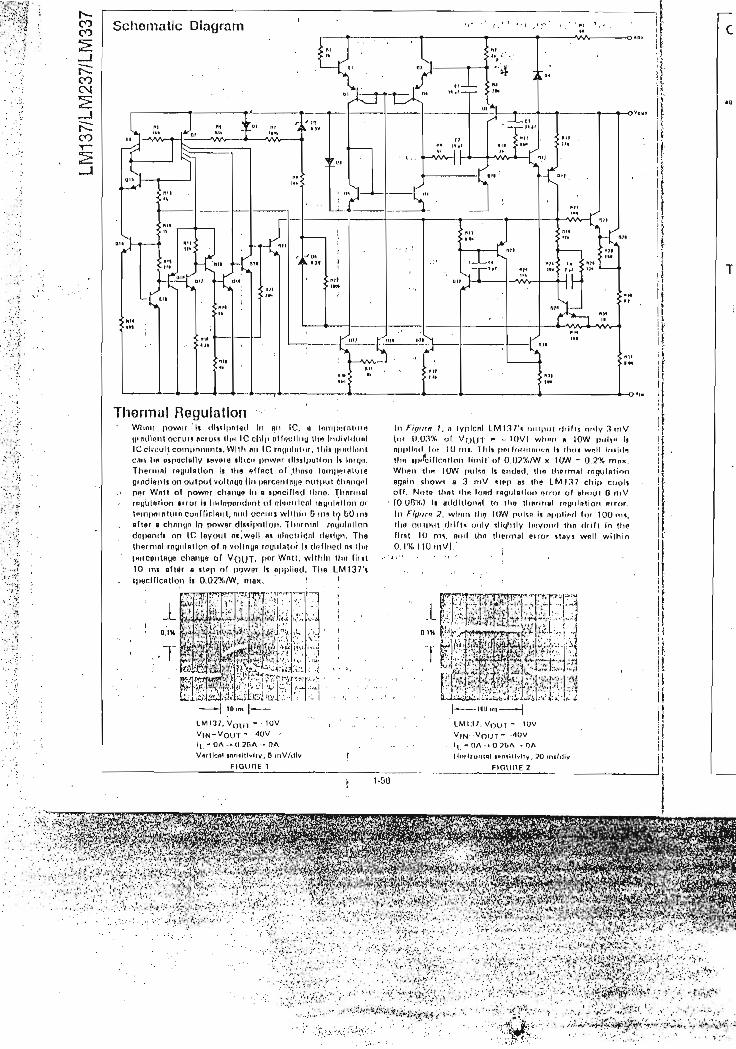
CQ
coCM
2
coY—
Üí™
:-*:
Schomatlc Diagram i
Thormal RegulationWhnn powiir Is dissfpiítud In fln IC. u tmnp'irnlurif(ji nilicnt ocruts nciuM llm IC chlp of lucllng (lio InijividunlICcluMilt compnnnnti. Wltli nn IC r«(|t i l«tfpr, thii (juidlmili.'fin |i<t Qfpoclnlly invnr« sihen pnwnr dksiputlon U Iñigo.Thennal ragulatlon is ths flffflcl of .thusfl TcinpRKili.ilogi titilen ts on output voltngu (In pnrcotitngc output ¿hanc|t>}por Wntt o( pownr chongo In u ipnctflod limo. Thnrninlnnjulniion dirui ¡s |tldopei«lant uí idnoiilcfil ingulnlion ortpmpfliaUírfl cunFfiohiit, nnd ocnuri wlilifn G im lo üO nú«ft«r a chnfign In pownr dls^ipi'llon. "Ihmmnl rfiguldllnndopondí on IC layout ní,w«ll B* eloclildtil d'jslgn. "Ihe(hernia! rG(jutation of a volinyn rt'dLilnior \t floflnod n^ llm
puicpnlHfifl chnngH of Vf)UT. ["" Wntl, vvíthin ttm fiíüt10 mi aflijr a stcp of powor It ppplii>d. Thn LM13í'í
¡j 0.02%/W/tnex. : ! !
In Fií/iirn 1, a lypiciil LMH/'í niilput di i fM only 3 mV(rjr U.O.'VK, oí Vf)V)T f - 10V| v/h«ri A 10W pulí» Unpplfird ("t }() ttti. 1 hit pnt IIHIMHMCIÍ lí thuí wrll Incidíthw ipílcíficnifon llinit of O (J?%/W x K/W - 0?% max.Wlipn thn 1UW pulsd Is ended, tlin thprmnl req\jlationsijnin shows a 3 niV stnp as the LMI37 chip coolso f f . Noto thnt thn lond rdgulaiior) (írror of dhuyt O rtiVU) UR'K.1 ¡i üddliJonnl to tliB thnrmHl ingulstion prrorIn Fif/ura 2, whim th<? 1UVV piikn i« npplicd fr>r 100 <m.tlni output dr i f ( * o'ily jliqhtly hi-yond the d r t f t in (heflrst 10 rm, and ihn thnrmal error itayí wetl wíthin0.1% ( l ü tnV) ,
¿«•I, «J:.¿4ví)fi'
lfeH:tól ||S^DÜ ' íííéit.Aí^
, *K* i'.'-^l.'í wr - * - • - • ! ' •"(^••.b/r-v^^-'.--*'';-.-. K. f^.k^áí^H^Sr^-^MfifíífrfliS ÍÍ.' 'r-:TvV !"•"'
Kr¥íW^Kv!.^P
-—it~~
I.MI37, VOL
ll. -OA-*U 2C.A • OA
V«rtícnl inruitlvlly, B uiV/Hlv
1
i Mía / , vOur - iovV[N VQIJ ^ ~ <1UV
l( - OA-'O ?f'A - OA
MoitmnUl wniílMtv. 30 P
FtOUllE 2
f
ii
'^>:^y
•):-..'s>v;?W^-' : * ' ; . • . ' • ' • : • : - ' ' ' ••'^^pv,; "i.- - í> :.^ i.,.Vv5,

Conncciiofi Dingrorru
tO.l!)
I.M.I37M
Typical Applications (Contm,^,
*oirlnf(ir
I I U r n /nú
)fl,.r m «i» opUonnl lo IfTiprov* rlppfit rcjniitlor
i .?r>ov
<- 12f)u
W'-t inC,. U lnt(]«r tlmn 50»iP, (11 protón"i" I.M137 Iti cntit rl<«! ln|íUI uippfy |i i f iorfnrf
Wr,f>nC?ii1«ronr llmrt t O / j F uncí -VOUT ||
liíO-rr tlm-t ~2W, irj pmtncii tttn LMI.17 In
TD-ÍJO ' 1070!Plflttlc t'iu.lirtun l'líttfk f'íii <
í O f Vl"-.^:rr.-4_-T-^r-.-.^-
AllllllOil UT , ! \I 1— ... ...M-.
IMCIIl 1
'*nJ- • —
^IN
i
:.':' *ñ.i • • •
,•
- - - '
O .• - " v^
LJ-. ..
1TXTT¡r :
-»--vour
*ÍN
• ' innfi virwr i t r iwr virw n<i'*r Nionhort
nn^N.l.Hh-r, I-M137MP. M.( ,.. . ?!mt NH l'nnlmnn Pf13 A
' 'fiMN3PiMfoia.Tn.1ll F'nr T«Mf-.»,nO?n?Or.f(.rN..m).».lLM33ÍMC 7H
! ¡ 1 f ñ"« NS í'ncl'nH» POSE
-B.7V Hnfliiliilor wllh EIiKtronln Stiutrlriwn» i • J
' , ' . . ' , J . ' TTI " , • ' ',, ' '' cflNinni
: : • ;~í
f
' • .ivrn-íitu
f 1 T tJr I 1yiMM
VIMM 1 X"- - .V 5I(t, , 1 jNitni ' —
i S *•-,~ 1 ;,( . 1 ,-X1 >" • I I
•i N1"1<""• _ MU % l*v
,
¡
í ' ' ' -".„'
v[iiiiLLJ—Kui " ííu1 jvir(
* •
(Mlnlmimi ontput (« — l.HV wl»nn cnfijiol luput 1» low
• i ' ' ' ' , . ;1 rfjniitlon ' : A()|d,t«h!n Hiirronl l1*n»tiMor
. • — , — , ^
' r-l'-J"\^ ' i*
' ' ; pJAfii J"1I (MUÍ f—l— — A— vw— •1 . rom ni
yiN t -i-
.
• ' " '"
'
Í'iiitl /i.nv\i 11- - 1 -. 1 •> IK-" - " ' 'T Iflin " 1 "' ) * ">'.fi n,||intnhln
Hlflli Stnlilllty -10U n«t(]iitnlnr
'. 1-. JL
—1 i
; ' (_
'"
-nú™ — A- . , ,
. . . , > . ,.-T ? . . . . • ' ,i»' •
IMDIK >1H 1 ' -k.1 1 ' _lfp_ *™ -A ,„, , ,
Sn,.H í1"UHJ >^1|K >m , „
1 — « iil 1 1 A '•'! ' •1 — L-W» u««« : . • .
|yix . :
i • ' ' ' • '•, i • *
^Ü3r—A,
oo
r~S <N?OO ;?
^ Kt""" í"r?« 12ÜSm (i-5
CO ^"cx> *^1 fí/
fM:n«/- .
1 Wnaí' '
í3fá_w^?sfc tó^M' 5jaJ^^W^
!"'<t
Í-V
II
1
1fca'l>>*«f-S*fi3l.íí vi
i
'%
§1
1•"' 1i¿*K3E
1íá¡i»*':'"'írj
P™SMt*k(V
ra;)4r(>.'¿e'.-yt.wí
í$iPli?-"•'•'. '-'Jvf. '.'.'"'*
raSBS^'.-'SÍí^S1ÍMli^^&$>
1-fi!J
í?^ \'i:;.a,-;«SíS fe
'Wt^ss*Í SlT'
^^^^^P I ^^^P^^*^?a^^^^^
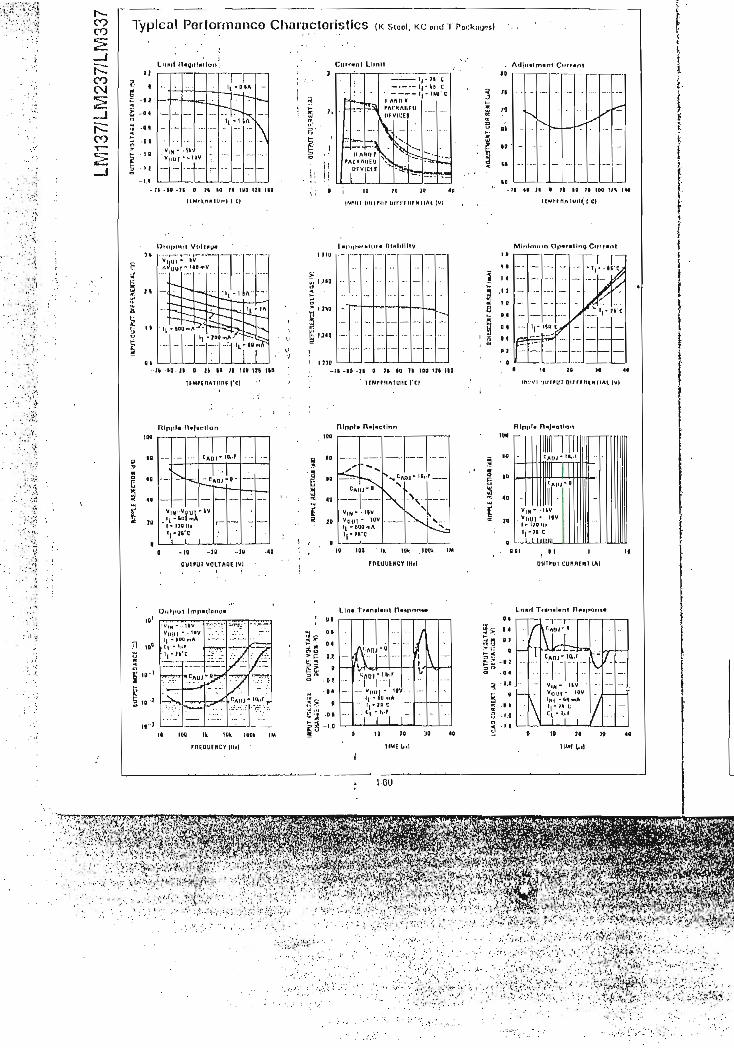
091
vi lujuum muña
I II ' IBD
imrrn—i'II Bul -I
ASI . l'K'AAll- - W I A
. «u
IM iviiNiuujuj j njiin, u. ;n
I» M Di 01
(«III A3NJlltl Í1IJ
inni idi 11 DOI
CH)AíNínnauj
Kl 1001 101 II . DOI DI B>- , oc- ar- oí- B
\fl,.r(W
API *m»AA I I - - W A
.. ¡
__
—
-r-
—
— .-
_
-0
j.-n
—^
— ,
- — *r«v
-f
- 1 •"a H.l,•HfiEI -1
V^DOS-1!M-
'*3
IfllA"
%
A«
mi ni noi til ai ií n ii-ai- ti-ltil i .
ur>t).i»f*U
P.l ÍIMIIVIIWHIJ
Olí t.ii uní i; ai si o n -ai
M) lui iNi tJ i uní nuuiii nuNí
a» ni at Bl ! I
3.1»! •>! -— — — . ..1 «.ll —•-3 Sí - ( 1 ~
V I O - 'I
J.J..
PUB ox ' [Dois >,) soijGuojoi?.iei|o
co
ro
coco
NationalSemiconductor
Voltage Regulators S—X-4
LM117/LM217/LM317 3-Terrnínal Adjustable Regulator
Gonoral Doscrlptlon RThe LM117/LM217/LM317 me íidjmtnMf!positivií vultni)i» rttqiilnlors cnpnbln of supplylhi) íii tixci'«oí 1.EA ovni o I.2V lo 3/V ttutpiít rnnytt, llipy «"i
pxri'plkmally mtsy lo us« "Hd iiii|iilrfj imly lwo oxliirnijl
rpsistnrs to iiít Ihe oiitpnl vnltfiqc. Tuitlipi, Imtli IÍMPnnrl load retjulatlon mn ImlUir thmi stítndaid líxi-r! rnjuln
tor*. Alsu, lito L M 1 1 7 M (lackanniHn iliinilnt<) tiomritoil'ni'l- mji>( which ni o i»imly nuiínm-d mid Imndli'd.
In aildition lo lti(|lnM p'M fotmiinn? lluin fiX'*il n!i|illíl|i.jn,
I he LM11 7 si'firs offfíM (u II ovniloJid prnt^clionavuilabln only i i > IC's. Incliidnd 011 Ih" cliip ai»? curmnlliinit, lhuíninl iivciloai) |ttnl(>c:(iun nud safe IHIÜI (milpr-tion Afl ovi'iload iitnH'ftion rítrniM V "'MIHÍIH (ully
fimclintinl ovHfi II ti ID iidjuitmont Inrniiniil hüiícomii'ctptl,
Footuros« AdjiíHinlílf nulinil ilown Iti I ,?V
« Gunniniopd I.BA oiit|Hit cufionl '• Llne rcíjulBlion lynicnllv 0.01%/V
• l.otift tntiulfUion ly|j¡r;illy 0.1% . ,
« Cntf(>ni liinlt constnnt with tonipifniunt?
« 100% nloclrlcn! buril -In
« Elimínales Ido ntíerl to <tock mnny vollf i i fRí
« Standard 3-liütil t iamistor packayc
" GO <IO f ¡ppl« rpjuciion
Nnimnlly. un ciipiicltuí* un1 nni'dnd unlins Itm ilnvictj iisikiHtHd Im f fom th» fnput. f i l ic r cnpncltuis In whirli
c.n« un inpnt hypass is ncnilmi. An opUonnl ontputcnpocitor cftti lio ndijucl to irtipinvii triinsifiíit tiispomo.'I IIP ftiljuMlMitnt lomttnal cnn ln> bypn<ÜOtl to ntlilnvovrty hiyli ripiiln rejertioni rn(k« wliicl» nm diífiímllto dchii'vi) with fiondnrd 3-torntlnal r<njul,ilf;>fs.
• Utuiílds i«ptiH:iny f i xc r ) rpqiilalnrs, Ihp LMl 17 is uwdilitt a wi(l(? va r i c t y of oihfr applícntmrn Si'icí- (he rpgi.iInlnr ii "(Inatinn" ntul *«•<:* only rlif» iupul to ottlfiuldtffnrotiltíll vnlhuir, íiipiilint nf tnvor.il hitmltci) vulu
cnn tic ip(|ul>i|i?d ni long ,11 I!KJ IIIGMIMMHII itiput to
Olllpllt (filIniClllinl IS MOt RKCI!IMf(!(l.
A|ÍO. It innkps tiit fípi'cifilly Onipl" iidjinliililo twilching
[ciljulllldl, « ptU(|IIIMlíiUlbl(( (iillpitl rr-ljllllilftl, (ir hyCiintiiiclinu 'i li»'"i riitfiliii h"lw"nci thi> .i'IjuiliD'iiM ati'iciutpul, ll"1 I M I ) / c.'m l.ir im-d ai ;> rneciíínn currenlri't|iiliilor Siifiplii'í wilh rlrcltntiic shuttlnwn can hu
arhiuved hy clamplnq tlin adjt i ftrnrnt inrminal to gtound
which prnijtains llie uulpiM to t .7V v^ht'rc rnoM tiMiIsitmw Httlf! cturcnt.
Thw I .MI17K, LM717K and 1MÍ1 /K iirif p.^ka^H , - -í t f i r i f lnrd t O - 3 linnmtoi pín'kai|i-s wliilo thil LM11/M,
tíiisit I()-ti iriintiütnr ftnr^;n\" Ihr I.M I 1 7 U rfllM (oíupt-tnllnn linin - fiiV'C tu i lüOG. th'> I M 7 I 7 frnro
•J[}"C lo HriU"Cnntl IrV I.MIi; frnrn Ü"C U> »I75"C.lint LM31/I and I M.l 1 /MI*, ratfd tni opi-tntinn twi a
0"C lo i T/r/'C i.ir,nc, n,* nvailahlo in n TO 220 plástic
|iiinktn|(> ¡tiid a I O 'AYÍ |)nckoi|(t, n*i|>flclfvBlV-
T(ir ¡ippllriiti'nii ic ' i iMrirM) tfir.'itr'r oulp'H f:i(trnrtt ttif»xrf« fif 3A nnd !>A, S«'P LMI5D M-iifS anrf LM138s*MÍds da tu ihaiflS, tfiSIMtctivcIv for thn niMj;Hiwe cuntplpHH'Mi. <f!ü LM137 st-r i f isdalash. '"!
LMIH Smini Purkiign •-.<! r..w«r C»|>«r>ilily
3EV1CE
Mil /
w; i ;Mil/M;M / iM:Í ! /M
1'ACKAtIF
IU J
ro iq
t ( ) 7VO
[ f j ytt?
liAIt l)
COWFH
DIRSil'AIlON
2UW
^VV
tnw/ !.v;
OFKir.N
LOAD
cunntNrÍ".6A
o HA
i SAU r,l\l Applications
\ i''-,;:'"1; •f:¿^> :••:/'.;•" •v"i«í;,- r,',«,'.".- ;'-lU> •/ , ••.•'"•;>-..';.•;':;•*"•.••• - . ' • - . " ';¿'5S»
?B«^&KW'H-
fíW^v^ ;:-;% ;-\;i^í
t$*$3$lSÍÍ¿&3 Absoluto^MaxImum Ratings
Muirle J
41) V f • •
MipüraUnt.' lÓulüi'i imj. HJ MM:oinW '
ProcondltlonlngUiirn tu tn Tlitmnpl Llmlt .
Eiectrical Characteristics IN^UJU'IÍ, All Üov
I'AHAMI. ll H
HM5 Outnul Noiii!. % of V(Hj!
R'pfilp Rf|<H-titm flntin
long lui-n Sinhüilv :
1 li.iiin.-tl HiMiOiiiH «, Jijfirtti"1 'u ('»»»
HUNDÍ riuM:;
10 ,..*•• it -; 'IMAX?r.v - iviw v(.tu!''.' 'lí)V '
:? • (V|N Vrjurl • -lov (Nnu- :iii u ni A -. IOUT "• IMAX. l>' f'MAx
VIN V()t»i - "'vK (Illd I P(lr'k,ll|i.
II Miirl P n,ii:kiMlif
VIN Vnuí1 - iiiv. !| - '?r,'(;K Itrid I Ptn;kH(((i
H añil P Purl-.íHjM
I A • ?ü'C. I" H' '• I '.- HUHí
I A - l?fi C
H Prti;kiiqr!
1 M l l / / ^ l /
MIN (VP MAX
I !í()ri
0 4 .
ti .ao
(6
0.3
I M.l I /
MfN IVf MAX
i :w
0.0!>'»
no
7 7
O II
i?
05
o o;
10(1,
007
15
3
/ 'A
fin
rlR
'c w"C.'W
c/\' C.'W
i'iy f.t¡ i; i j - - 1 MI (! f . - t ti.» i MII /, ?iv f • • i, . i'.ii f: foi rt- I.M?I; -««iH1H) , - U I A I t - r 1l>c 10 * ;„„! |M ;'nJ(..., (.tMMM muí I, ?M , - U '-, A f í ,r ti,» I f ) | riw U
ltirn,.l!¥ liuiin.il ilmín t . I ) |F ' , , I ,PI , ( , .,..- ,.pri,. nl.i.. Im ,,(r.'t«i íl-v.-initmot >)l ?W ir,, rlic
II i 'i .vxl 1 ii ;t^nttit ;t)VV t f i r tlio t i l I nmj Id J^ll. lM/yN '« I I'A (l" t)i» M.l-.t mvl lU ;Vil(iMi-kH«i» nml(M¡A I')' Un» K) r, „,>.! KJ ?r>? (i^-rVaq*-N.n« 3' Moi|ntntir)M 'l miirtiiifil n( i-nlnirtdl |'Mn Hlm i»m|!i«mliirit. tiflnrj |>li'l» tnilttirj wltli K t'»" rluly cy-rlc Cl-ninji-^ in nitlput vnltmin iluí1 m
iirnnmj "li»rn n'p rr.iv»(i>d U'i'ffi thn t!»>rlfit'Rimn fru iliHiinnl iHunltttiO'i,
NDI» 3: Síli-ctsiJ iluvtcei wllh t¡ijt>t«"<'l ic'B'tncii ruítuenc* voliHiik dvillntil».
~ I - 1 0
Typical Performance Charactoristlcs
^^SfcgEfe*^^asSiS
%fifpiPpPÍ
CRSWÍí TW1-''.'
Pfplíffg*
'•v-::
g^$$
$m-$
f• i • .
x%&
'í.
•• -
• .\.<
-//•
*• -^v
8»-'.™
¡- .
-. '•
: ,.:(
«•-
,..-
;-..i;
f«
v
¡y,
• ..:
- A: ^>
:if¿
^S^7
^Li*^^
^>l*
:i>^0
-';:;:
;i
;, : v
r- ^
S.w
'íííJ
P^
*.•.»
• Vi' -^^-'
S-S
fIJ
Í>í
áfe í-
scS
^?
W^e
SP
esa
f
P^^
l
LM11
7/LM
217/
LM31
7
S =
S =•
& >
J1
5-
= 2
a 2
3 «
= | 2
3 S
= |
g. =
= c
. =
= 5
2.
~=
-S
o=
S
c -
=
=• 5
* *
g
<,
_,
Si
»»
2'
55
' <
s
_*
.^
_ñ
—
— -
"?
—
""
" —
o
• ~
C_
3c
"^
"
ñ"
Cír
:5¡'
"*
^
=
~2
:"
ír
i;"
'1'*
.^^
c"
x*
-^
cS
""
~—
—
S'Z
."""^
1^
?
_3
~H
-¡3
S ^
o =
_
o -
o =.
_ c
- 5
3 =
— 3
i"
? 2"
" -
—
• c
"*
•&
c
J — ^
lis
f?;
-o£ •
s |
§ |
"O
.•
"
I- i; i I
a 2
= ¡|
f-3
3_
=S
5
""• =
!a E
5"
O <_ 3
c o r
. —
„ *
€ 5
« ,
» =•
-c
•" <
s C
=. T
¿
5
C =
.
£ ?
P Í
="•' *
"S
- 1
=: I
a ?
3«
ZÍ
o"
*2
* —
1 °
£• Í
I"
3O
™
cZ
*»
«5
c
O
"
C £
•"£
. _ o
'X
3"
—
*
r- 2
L Í3-
«
=•
— ?
<•
c
o1 *
í1
?
2
5
o 2
. Gs
ss
'Sl
í
i-"í
;-,í
£3
="í
Z--
i;~
3.3
3
3»
*«
-a
—
— ü
. *
— -
<"
;£
.-
•'—
-
_ -
*
ic
S ^
o
z.
5—
¿
— ?
o£
°*r
;*
5?
aS
?2
í5
£?
3'
z.
;/::.-
-
^•
;»
• -
•••
.
_T
T
||5
:
| t
VLí1
.
55
1
--
--
--
- -
-"•
- •
- -
o o •
' .-
. -
3
. •
»
• -
--
-
^ »
3 -1
Co i
tr
.5 |3
I -
-
-.„
*
S. 9
- ^
Í"
¿ - "
S 5
g 2
-g_
S _
3 =.
o
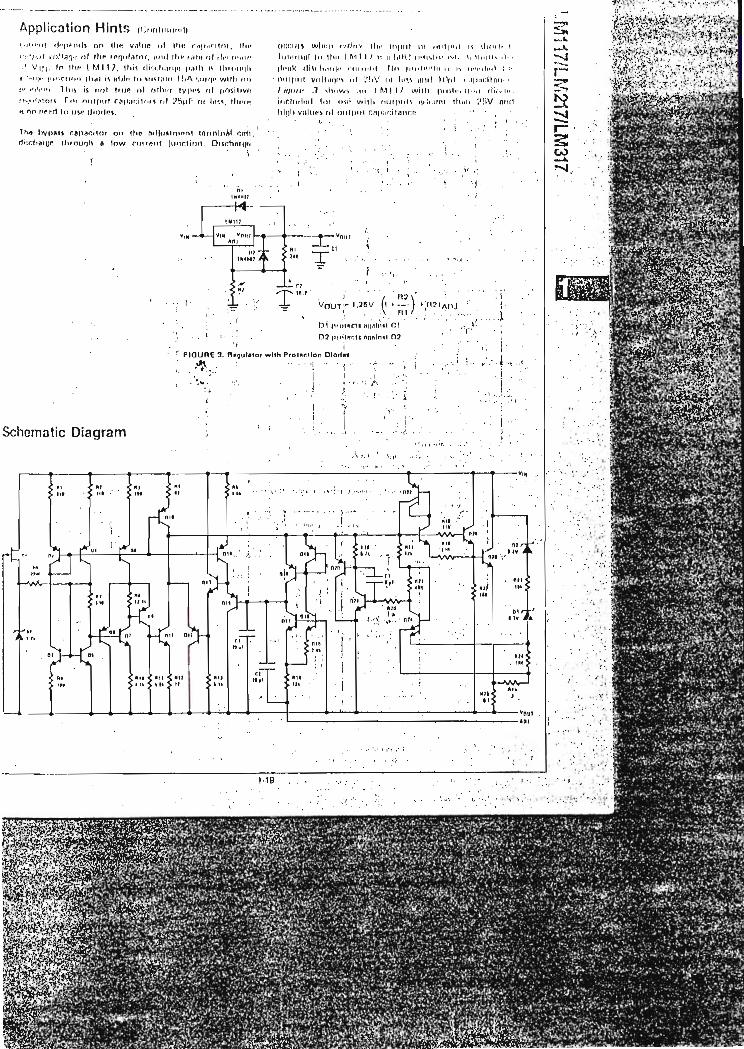
Application Hínls ^.,mttnt,w\\ (ji-pf-ndi on \í\f. Vítluií ut Km Crt|t i irrtni, (lie nmilí Whni r / f / r iv th.< Input nt MiH|n,t u s lun l -
' • * ? • . ' ? voJf^fj.r oí flir rryiil,i!nr, añil ll.i- i.itu o) <!,•< n-.*:i- ln i" iM¿i[ Id llin 1 l\-i I I / i-, n (HHf n-tr-ln- >vL h DIMÍU ,1-
' V | ' j . Ifl Ihf IM117. lliíí (l¡'t.fi,lll|i) |i,)l!l IS l lu<ill i| l> |t<-;lk tlí^ li,ili|<> Hil.l'l.l f! i» |Hí.|l"')u u i-, IMN.I|I«) (.'
t •-.,,),. (ucríiort HMI n fitjti' li, MIM.IIII I!, A ',iiM)i' with nn • i'nH|in! tfiillt»)i's ni V!,1-.' ni lit", ,|hil tH / r l i .)p,ii;fl¡Hi. •
is MÍ>| Ifiie oí f»thi:r lypi-s f i f (líisinvn / iijun- ,'t -.li.iws .m I M I ! / wilh
¿.&&: ;::,--..'--• ••-'?"•'.>:f*/.\Ví"-••'">, V
—ki
yj~*
tzsco
ÍW-.V;:;-t-.^,-;-!¿i-'iv v-tí*KOT^wgL'í*'¿¿tpSfi
^^
^r^
:-Wh? W»>>i7fJk
'¿* íJülft ?, • >•: Í?n
SÉli <-
$&m
m
' ^W^M^^iS5re*wi<«^~v',.~fr •;«••**. s-a:t '* ; ;"-i T J1
llife iSi'íí
11.--Í •':-,•
f
;^;¿nl^
A^r^fT^jK§" ."•'¡.~... i*';': ^ í¿ ?.'•*,f&*
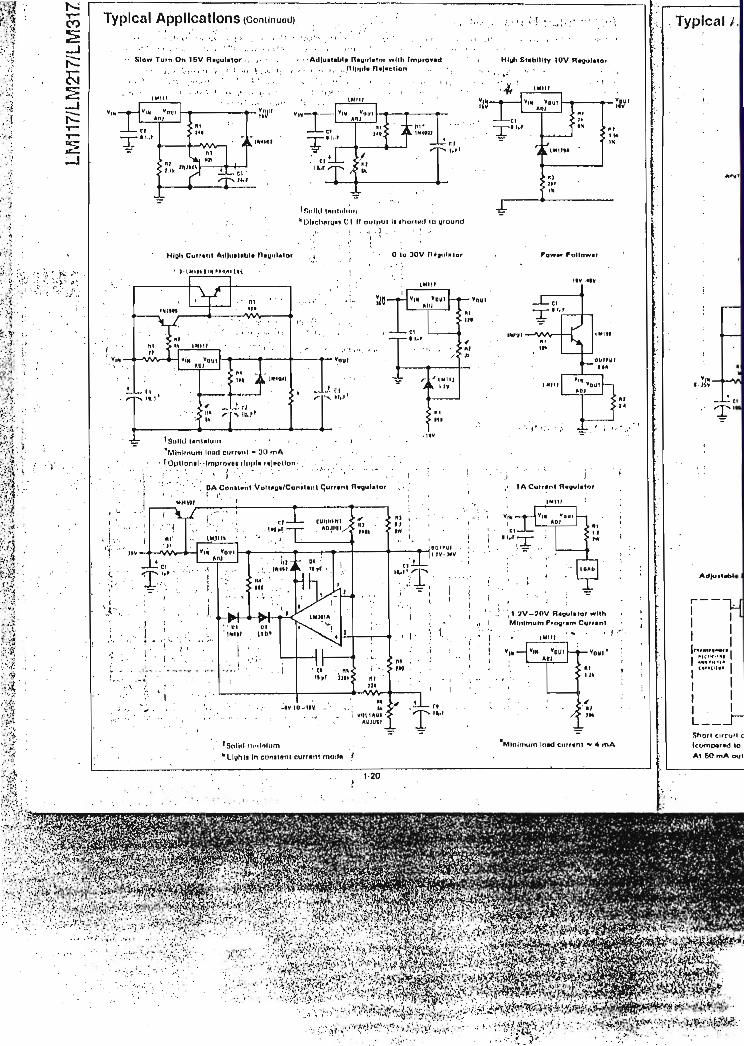
r<T-co
p|: i
$$£;'^.VVV.^ -' . . . . : ,
mZm-^ *
*••' ''-vSR$3
• *ÍS
Typlcal Applications (coniinuoü). , i , . , . ' ' - . . >,s . • v .. •> '; i
• Slow Turn On 1BV R»gul«tor •, ,- • . Ad|uil*til|i n*u>rl»tnr w (h I• ; . le ,,"l(i|»l« Ht »cr ort
Hluli .SlulilUty 10V R»guUlor
«tH—f
4r r
Xj!
*,„__.iiv T
, _J—1|
llJoIlt Iniítuli'tii ,
*Dl*chflrgM C1 U ontpiul i il>orl«i) in yrounil
0 lo 30V fl«B.ilitior
X"
, ¡"i
íl
OH« foi ow.r
..', nie,r(
V,MMj-J-VDIM
í"'< III
> k l i v
; ; Mr",'Sulti nmmlgm ' • ; . • • • . (
Mínimum Intuí cii'f«tt>( •• 31) tnA ' • .
tOptlonsl-lmpuiv»! rlppli t«|BOtlon' ' . '
j"* ]• '•; . .';" l . í 'V ' ' " '" '" :• ' ."' ' " ' " ;.''" DA Ctmilunt V»It*u»/Canitanl Cnrmttt n*gul«lor
* < ' i'
' ': ' 11A Ciirmnl n»aul«1of
'Soliit Ui'i nlwm i
"Llghli InconitBnt currtnt inotlB /
Mínimum kitd eurttrU •* 4 mA
1-20
' >, - 'f' xi.'. "' e t • : ' ' . • ' • ' •' - !t •'* -'"' '.--,-• -Vv -y>" '• ' •' '-';.'; '.• -'-- ¡ ií * ' . - * ! ,-. -. i•,---' ' • f>iW;V.'ií'><«» • V' • iuV'/f-r1 ¿',1.'. ,
Ifliív^^^ f":; • ¡ ;-',-;•;' -j $^£*^:ü$.¿ í¿4^¿' V^Í^^ "
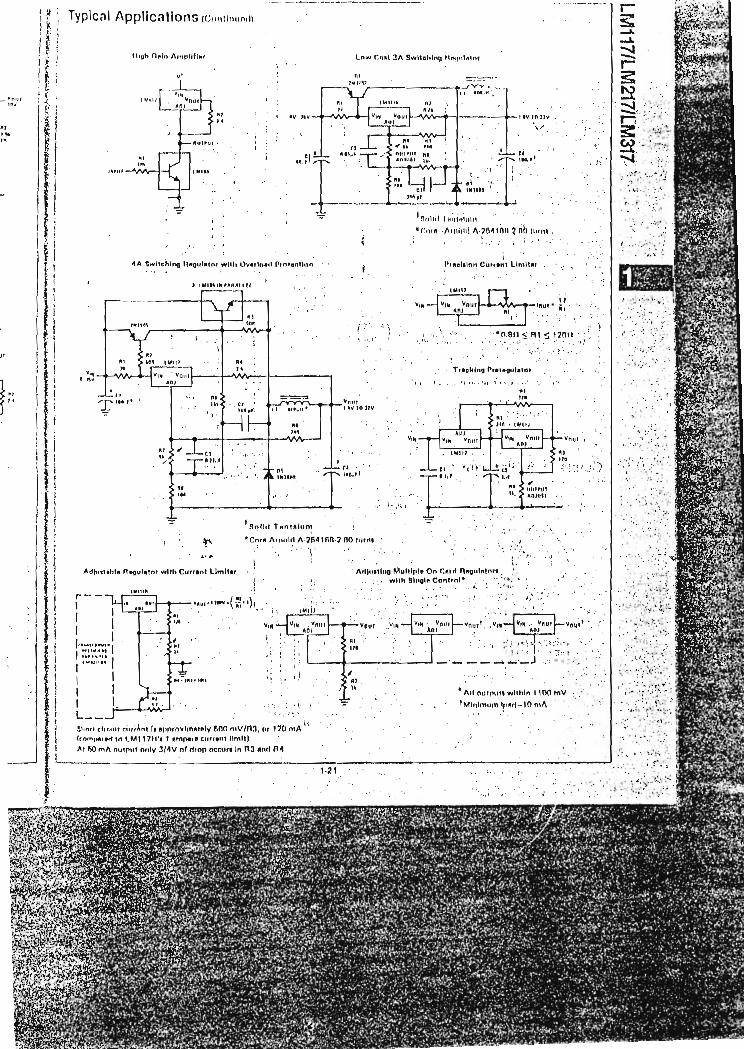
'- • •''V~-*^'S''**
í&' yv'j', ',-
'$••'&$ ""'-"¿'i'.''
1|$ $fí: . '',l''s-'-;':'*
•-r^*'-";^
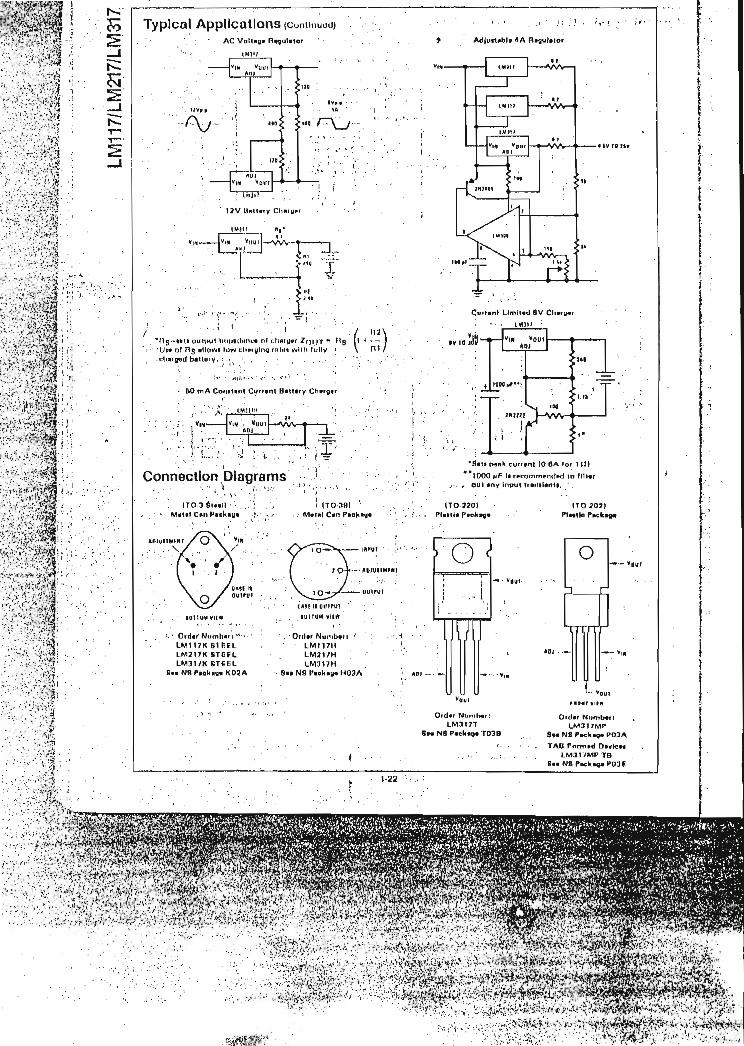
^^^'•h'^^fM jV-.wi'-^-'.-í.v'í '-'i'/•'•Sc¡í->¡á 'í•,-.:•, vi.*.-' •.-?.'.•,-.I*H-'>','^,iit í
^fe^-&^:£& - 25•Typlcal Applications (Cun
AC Votlng* R«vut«lor
IMllf
Ad|ui*«blt 4A B*Hu)Hlor
. Mg -un uutiKtl nniBil'ini.'a t>( flmtiiur Zf j i jT " "g'Uto ni Rg Hlloni low rhmglng rntiií «lili luHy-cliKtoad bal luí v-
/ n a \[I * -~ 1\' /
Curr«nt Llm mil (IV Cli*rg*r
LMltl
. . .Conneclion DIagrams
•(>nnk cuirvnl (0 6A tor 1 fl\0 i¡P li fBco'DmciidíMJ tu l¡ i«r
oul »ny Input tr»iii «nt». '
irO 220)PUitla P>Dfci
ITO 202(
10-L—HUJUlIMflKT
' Orrfic Nmnlmn Mi iI.M117K81PELLM217KST6ÍLIM31/K BTEEL
.f NS P»Dhnu* K03A
: Ordtr Ninnti*H ;
LM117HLMJ1/HLM317H
Su» N8 l'noh*u" H03A
O
LM3I7T• N8 P«e*(»u* T03B
'- VOKI» H O K ? y i t n
O'tl«f Nurnb«f!
LM31/MP
8t» NS P«*»«* P03ATAB Form»rf D.*kM
LM3I7MP TDEn* NS P«ch*o*P03E
•v ;v.\j !>tmlMl^
• - • '^->^:^ü'^''¡'':^ ^•;"':v^C
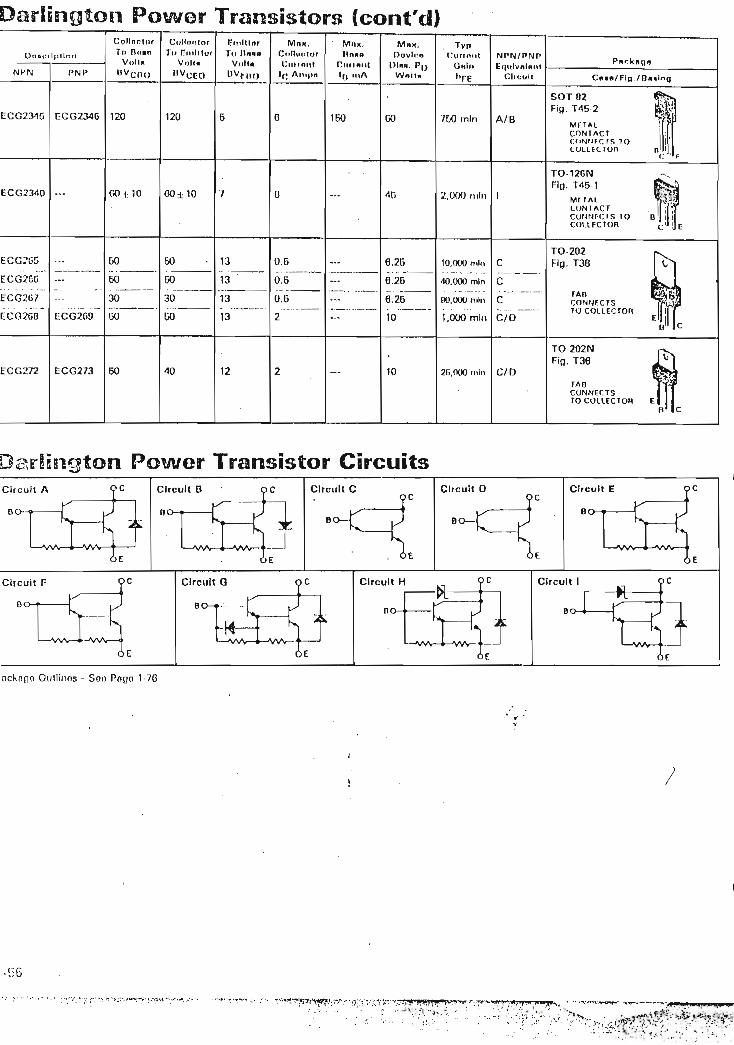
Darüngton Power Traanasistors ícont'dl)
D • 1 ni'
NPN
ECG231G
CCG23-10
ECG-65
L"CG?GG
ECG2Ü7
tCG2C¡0
ECG272
PNP
ECG234C
-
—
—
ÜCG269
HCG273
CuHnrtofTo linioVolli
120
GO \ 10
DO
50
30
50
50
CoUfti;torTo F.mlltui
V'»ll»
"Vero
120
GOj; 10
50
50
30
GO
-10
FmlllnrTu Mino
5
13
13
13
13
12
Mnx,
C "Horror
Ij; Ainpn
6
Ü
0.5
0.6
O.D
2
2
M'IK.
Un*»flHIM'lt
Ifj t»A
150
,
...
—
...
...
«.
MHM.
I > u vico
WllllR
GO
6.25
6.25
6.25
10
•
10
TVPCurtntit
>'t-e
/DO rnín
2.ÍXKJ niln
10,000 nilti
40,000 rnin
90.000 min
1,000 mi»
2r»,000 mi»
NPN/PNPF Ivnlnnl
Clioull
A/B
1
C
C
C
C/D
C/D
rS*!K(l(Jfl
C.M/na./B»ting
SOT 02 *>s
Fifl. T45-2 ||
wprAt. * fr
r;<íNNff. rs TO ! !r|(,uLt.E(, ron n1 ')
í; 'F
TO-126N
Fig. T45-1 &^MF (A l Iv^
CÚNNr-CIS TO O Í !|;|coi.iFCíon 'i ¡je
TO 202 r\. T38 O]
fe4iCONNfCfS ífá-'$
TO-202N -wFig. 136 iy\g
TAO l'-f pCONNFCTS I 1 ITO COLLECTOH E| 1 i
Oariisigton Power Transistor CircuitsClrcull C
BQ-J
Circuit D
00—
Circuit F
DO-*—
1—-WV--*—AAA, 4
¿E
Circuit H Circuit I
Oullínna - Seo Pogo 1-7G
Recommended

















