METODOLOGÍA PARA EL PROCESAMIENTO DE LA
INFORMACION DE UN LEVANTAMIENTO CON ESCANER LÁSER
EN PUENTES TIPO TRANSMILENIO
Presentado por:
BRYAN FELIPE MANCIPE MORENO
JHOAN SEBASTIAN VELANDIA DUARTE
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES
PROYECTO CURRICULAR DE TECNOLOGÍA EN TOPOGRAFÍA
BOGOTÁ, D.C
2019

METODOLOGÍA PARA EL PROCESAMIENTO DE LA
INFORMACION DE UN LEVANTAMIENTO CON ESCANER LÁSER
EN PUENTES TIPO TRANSMILENIO
Presentado por:
BRYAN FELIPE MANCIPE MORENO, CÓD. 20152031017
JHOAN SEBASTIAN VELANDIA DUARTE, CÓD. 20152031545
Proyecto de grado presentado en la Modalidad de Monografía para optar por el título de
Tecnólogo en Topografía
DIRECTOR
Esp. Ing. CARLOS ALFREDO RODRÍGUEZ ROJAS
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES
PROYECTO CURRICULAR DE TECNOLOGÍA EN TOPOGRAFÍA
BOGOTÁ, D.C
2019

Nota Aclaratoria
Artículo 117:
La Universidad Distrital Francisco José de Caldas
No será responsable de las ideas expuestas
Por el graduado en el trabajo de grado
Según el acuerdo 029 de 1988.
NOTA DE ACEPTACIÓN
El comité de la Universidad Distrital Francisco José de Caldas aprueba el trabajo de grado
titulado “METODOLOGÍA PARA EL PROCESAMIENTO DE LA INFORMACION DE UN
LEVANTAMIENTO CON ESCANER LÁSER EN PUENTES TIPO TRANSMILENIO” en
cumplimiento a los requisitos para obtener el título de Tecnólogo en Topografía.
Nota de aceptación
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Director
Dfdsfdgdfgdfgdfdfgfggggdfvdvdvdvdvdvdvdvd
Jurado
Esp. Carlos Alfredo Rodríguez Rojas
PhD. Wilmar Darío Fernández Gómez
5
Resumen
El avance de la tecnología en el campo de la ingeniería y arquitectura ha dado un impulso
notable en el modelado de información de construcción BIM (Building Information Modeling)
donde se ha podido solucionar inconvenientes a la hora de entregar documentos de tipo técnico,
aplicando el uso y el intercambio de representaciones digitales facilitando la interpretación de un
ciclo de vida de una construcción.
El escáner laser terrestre se emplea en numerosos campos de la ingeniería, por sus precisiones
alcanzadas y sus distintos usos que se le pueden llegar a dar, el potencial que presentan los
escáneres es altísimo, permitiendo obtener las coordenadas de todas las superficies que lo rodean
en cuestión de minutos, y sin necesidad de hacer contacto alguno con los elementos medidos.
Este trabajo se enfoca en facilitar la metodología del procesamiento de datos de un
levantamiento con escáner láser en puentes peatonales, aplicando el uso de diferentes tipos de
software que permitan la edición con el fin de generar una modelación en 3D dónde pueda ser
usado e intercambiado en el campo de ingeniería y arquitectura, siendo el punto base para la
metodología BIM (Building Information Modeling), además realizar un análisis e investigación
sobre la estructura y sistemas de georreferenciación en que nos entregan los datos (nube de puntos),
para poder así darle un uso adecuado sin generar deterioros o daños en ellos.
6
El trabajo consta de 2 Capítulos para su desarrollo, el primero será la etapa de Marco teórico
en donde se encontrará la investigación con temas referentes al proyecto y el segundo será la etapa
de Metodología en donde se encuentra el procedimiento detallado de cómo se realizó el proyecto
de manera estructurada
7
Abstract
Technological advances have given a noticeable boost for BIM construction (Building
Information Modeling) on the engineering and architecture fields. Therefore, a number of
inconveniences have been resolved when delivering documentation of technical type, applying and
exchanging digital representations and facilitating the interpretation of a building life cycle.
Terrestrial laser scanners are employed in numerous engineering fields due to their obtained
accuracy and different available uses. There is a high potential for these scanners, it permits to
retrieve coordinates from every surrounding surface in a matter of minutes, without the need of
any contact with the measured elements.
This document focuses on facilitating the data processing methodology for a topographic
survey made with laser scanner on pedestrian bridges. Different types of software allow edition in
order to generate a 3D model to be used and exchanged on the engineering and architecture fields,
being this the base point for the BIM methodology. In addition, an analysis and research of the
structure and georeferencing systems for the received data (Point cloud) is made. Thus, it can be
used adequately, without causing any deterioration or damage.
8
This paper consists of two chapters for its development. The first one will be the theoretical
framework stage where research in regards to the project is found. The second one will be the
methodological stage where the project procedure is detailed in a structured way.
7
Lista de contenido
Pág.
Introducción ............................................................................................................................ 18
Capítulo 1 MARCO TEÓRICO. ............................................................................................. 19
1.1 Tecnología LIDAR. ........................................................................................................... 19
1.1.1 LIDAR Aerotransportado. .......................................................................................... 24
1.1.2 LIDAR Terrestre. ....................................................................................................... 26
1.2 Escáner Láser. ................................................................................................................... 29
1.2.1 Principios de Medición............................................................................................... 30
1.2.2 Tipos de Escáner Laser. ................................................................................................. 34
1.2.3 Faro Focus 3D ............................................................................................................ 43
1.3 Puentes. ............................................................................................................................. 52
1.3.1 Descripción..................................................................................................................... 52
1.3.2 Clasificación por su esquema estructural. ...................................................................... 53
1.3.3 Clasificación por su función. .......................................................................................... 57
8
1.3.4 Puentes Peatonales Tipo Transmilenio. ......................................................................... 61
1.4 Inventario IDU. ................................................................................................................. 68
1.5 Metodología BIM. ............................................................................................................. 75
1.5.2 LOD ................................................................................................................................ 77
Capítulo 2 METODOLOGÍA. ................................................................................................ 82
Fase 1....................................................................................................................................... 83
2. Verificación y validación. ................................................................................................... 83
2.1 Planeación. .................................................................................................................... 83
2.2 Escenas. ......................................................................................................................... 87
2.3 Fotos en campo.............................................................................................................. 87
2.4 Carteras.......................................................................................................................... 91
Fase 2....................................................................................................................................... 92
2.2 Creación del proyecto........................................................................................................ 92
2.2.1 Vinculación de escenas. ............................................................................................. 94
2.3 Registro. ............................................................................................................................ 96
9
2.3.1 Registro por esferas. ................................................................................................... 97
2.4 Segmentación por escena. ............................................................................................... 106
2.5 Filtrado de las escenas. .................................................................................................... 111
2.6 Georreferenciación. ......................................................................................................... 111
4.3.1 Método Georreferenciación con esferas. .................................................................. 115
Fase 3..................................................................................................................................... 121
3 Exportación de archivos. .................................................................................................... 121
5. Modelación ........................................................................................................................ 124
6. RESULTADOS. ................................................................................................................ 131
7. CONCLUSIONES ............................................................................................................ 133
8. RECOMENDACIONES ................................................................................................... 134
9. REFERENCIAS BIBLIOGRÁFICAS .............................................................................. 136
10
Lista de tablas
Pág.
Tabla 2. Taxonomia para la definicion de categoria. .................................................................... 69
Tabla 3. Lista de chequeo de datos suministrados por el área de trabajo en campo. .................... 83
Tabla 4. Titulación de escenas por puente. ................................................................................... 87
11
Lista de ilustraciones
Pág.
Ilustración 1. Ejemplo de topografía LIDAR. .............................................................................. 20
Ilustración 2.Oceanografía. ........................................................................................................... 21
Ilustración 3. Modelo de elevación digital. ................................................................................... 22
Ilustración 4. Agricultura. ............................................................................................................. 23
Ilustración 5 .LIDAR Aerotransportado. ...................................................................................... 24
Ilustración 6. LIDAR Batimétrico. ............................................................................................... 25
Ilustración 7.LIDAR Topológico. ................................................................................................. 26
Ilustración 8. LIDAR Terrestre. .................................................................................................... 27
Ilustración 9. LIDAR móvil. ......................................................................................................... 28
Ilustración 10. LIDAR Estático. ................................................................................................... 29
Ilustración 11. Medición por triangulación. .................................................................................. 31
Ilustración 12.Medición mediante pulsos. .................................................................................... 32
Ilustración 13. Medición mediante diferencia de fase. ................................................................. 33
Ilustración 14. Escáner laser MDL. .............................................................................................. 34
Ilustración 15. Escáner Laser Lynx. ............................................................................................. 36
Ilustración 16. Escáner Laser Pegasus SM 70. ............................................................................. 37
Ilustración 17. Escáner Laser Riegl VMX 250. ............................................................................ 39
12
Ilustración 18. Escáner Laser Topcon IP S2 ................................................................................. 40
Ilustración 19. Escáner Laser Trimble MX8. ................................................................................ 42
Ilustración 20. Escáner Laser Faro Focus 3D. .............................................................................. 43
Ilustración 21. Deflexión del láser. ............................................................................................... 44
Ilustración 22. Rotación vertical y horizontal. .............................................................................. 46
Ilustración 23. Perfil Seleccionado. .............................................................................................. 47
Ilustración 24. Configuración resolución y calidad. ..................................................................... 48
Ilustración 25. Configuración del rango del escaneo. ................................................................... 49
Ilustración 26.Configuración parámetros de color. ....................................................................... 50
Ilustración 27. Descripción general parámetro de escaneo. .......................................................... 51
Ilustración 28. Definición de puente. ............................................................................................ 52
Ilustración 29. Estructura de un puente......................................................................................... 53
Ilustración 30. Puente en Arco. ..................................................................................................... 54
Ilustración 31. Puente de vigas. .................................................................................................... 54
Ilustración 32. Puente en armadura. .............................................................................................. 55
Ilustración 33. Puente Colgante. ................................................................................................... 56
Ilustración 34. Puente Suspendido en Cables. .............................................................................. 56
Ilustración 35. Puente Voladizo. ................................................................................................... 57
Ilustración 36. Puente de tráfico rodado. ...................................................................................... 58
13
Ilustración 37. Puente Ferroviario................................................................................................. 58
Ilustración 38. Puente para paso de poliductos. ............................................................................ 59
Ilustración 39. Puente para paso de la fauna. ................................................................................ 60
Ilustración 40. Puente Peatonal. .................................................................................................... 61
Ilustración 41. Puente Peatonal Tipo Transmilenio. ..................................................................... 61
Ilustración 42. Puente Peatonal baranda de acceso. ...................................................................... 62
Ilustración 43. Puente Peatonal rampa de acceso. ........................................................................ 63
Ilustración 44. Puente Peatonal rampa de acceso en concreto. ..................................................... 64
Ilustración 45. Puente Peatonal Dimensiones generales para pasos en las escaleras. .................. 65
Ilustración 46. Puente Peatonal Escaleras de acceso hasta el nivel de descanso de la rampa. ..... 66
Ilustración 47. Puente Peatonal Escaleras de acceso hasta el nivel de puente peatonal. .............. 67
Ilustración 48. Estadística por tipo de puente. .............................................................................. 70
Ilustración 49. Estadística de puentes por localidad. .................................................................... 71
Ilustración 50. Puente peatonal estación portal sur. ...................................................................... 72
Ilustración 51. Características puente peatonal estación portal sur. ............................................. 72
Ilustración 52. Puente peatonal Apogeo. ...................................................................................... 73
Ilustración 53. Características puente peatonal Apogeo. .............................................................. 73
Ilustración 54. Puente peatonal estación Perdomo. ...................................................................... 74
Ilustración 55. Características puente peatonal estación Perdomo. .............................................. 74
14
Ilustración 56. Metodología BIM. ................................................................................................ 75
Ilustración 57. Ciclo de vida del proyecto. ................................................................................... 76
Ilustración 58. Esquema grafico del concepto LOD de 000 a 300 ............................................... 78
Ilustración 59. Esquema grafico del concepto LOD de 400 a 600 y X00 .................................... 79
Ilustración 60. Planeación del puente Perdomo, 72 posicionamientos. ........................................ 84
Ilustración 61. Planeación del puente SuperCADE de Bosa, 80 posicionamientos. .................... 85
Ilustración 62. Planeación del puente Apogeo, 142 posicionamientos. ........................................ 86
Ilustración 63. Puente Peatonal Perdomo. .................................................................................... 88
Ilustración 64. Esquema posición del escaner. ............................................................................. 88
Ilustración 65. Tabla resolucion 1/16............................................................................................ 90
Ilustración 66. Ubicación de esferas. ............................................................................................ 90
Ilustración 67. Tabla resolución de detección de esferas. ............................................................. 91
Ilustración 68. Cartera Geo localización. ...................................................................................... 91
Ilustración 69. Creación y vinculación del proyecto. ................................................................... 92
Ilustración 70. Vinculación y titulación del proyecto. .................................................................. 93
Ilustración 71. Ubicación de la compilación de datos. ................................................................. 94
Ilustración 72. Carpeta con el contenido de cada escena. ............................................................ 95
Ilustración 73. Mensaje de importación de escenas. ..................................................................... 95
Ilustración 74. Arrastre de archivos directamente a SCENE. ....................................................... 96
15
Ilustración 75. Procesamiento de las nubes. ................................................................................. 97
Ilustración 76. Configuración General. ......................................................................................... 98
Ilustración 77. Procesamiento de las nubes. ................................................................................. 98
Ilustración 78. Configuración del procesamiento. ........................................................................ 99
Ilustración 79. Iniciar procesamiento. ........................................................................................... 99
Ilustración 80. Mensaje del proceso de resultados. ..................................................................... 100
Ilustración 81. Indicación de las nubes procesadas. ................................................................... 100
Ilustración 82. Grupo de nubes unidas. ....................................................................................... 101
Ilustración 83. Proceso de registro. ............................................................................................. 101
Ilustración 84. Consecutivo de las nubes de puntos. .................................................................. 102
Ilustración 85. Verificación de los objetos (esferas). .................................................................. 103
Ilustración 86. Verificación del registro. .................................................................................... 103
Ilustración 87. Verificación del registro final. ............................................................................ 104
Ilustración 88. Opciones del registro realizado. .......................................................................... 105
Ilustración 89. Resultado de los registros. .................................................................................. 105
Ilustración 90. Vista 3D por escena. ........................................................................................... 106
Ilustración 91. Opciones de vistas en el espacio de trabajo. ....................................................... 107
Ilustración 92. Delimitación de la nube de puntos. ..................................................................... 108
Ilustración 93. Segmentación de la nube de puntos. ................................................................... 108
16
Ilustración 94. Borrado detallado de la nube. ............................................................................. 109
Ilustración 95. Resultado segmentación individual I. ................................................................. 110
Ilustración 96. Resultado segmentación individual II................................................................. 110
Ilustración 97. Opciones de cargado en cada escena. ................................................................. 112
Ilustración 98. Opciones de vista en 3D escena. ......................................................................... 112
Ilustración 99. Vista 3D por escena. ........................................................................................... 113
Ilustración 100. Propiedades de escaneo. ................................................................................... 114
Ilustración 101. Sistema de coordenadas del escáner láser. ........................................................ 114
Ilustración 102. Vista planar. ...................................................................................................... 115
Ilustración 103. Búsqueda de objetos (esferas)........................................................................... 116
Ilustración 104. Detección de objetos automáticamente (esferas). ............................................. 116
Ilustración 105. Cantidad de objeto (esferas). ............................................................................ 117
Ilustración 106. Propiedades de coordenadas por esfera. ........................................................... 117
Ilustración 107. Asignación de coordenadas a cada esfera. ........................................................ 118
Ilustración 108. Asignación de uso y capa en cada esfera. ......................................................... 119
Ilustración 109. Configuración origen global. ............................................................................ 119
Ilustración 110. Verificación origen global. ............................................................................... 120
Ilustración 111. Exportación del proyecto. ................................................................................. 121
Ilustración 112. Software ReCap. ............................................................................................... 122
17
Ilustración 113. Review ReCap. ................................................................................................. 122
Ilustración 114. Panel de herramientas ReCap. .......................................................................... 123
Ilustración 115. Exportación ReCap. .......................................................................................... 124
Ilustración 116. Importación Nuble de puntos. ........................................................................... 124
Ilustración 117. Review Nube de puntos. ................................................................................... 125
Ilustración 118. Herramientas de modelación. ........................................................................... 125
Ilustración 119. Herramienta de cilindro para modelación. ........................................................ 126
Ilustración 120. Creación de objetos. .......................................................................................... 126
Ilustración 121. Aproximación objeto con nube de puntos. ....................................................... 127
Ilustración 122. Opciones de objetos. ......................................................................................... 128
Ilustración 123. Edición de objetos. ............................................................................................ 128
Ilustración 124.Creación caja de visualización. .......................................................................... 129
Ilustración 125. Caja de visualización. ....................................................................................... 130
Ilustración 126. Resultado modelación. ...................................................................................... 130
18
Introducción
Desde hace varios años se vienen implementando los modelos 3D en el sector de la ingeniería,
desarrollados inicialmente en aplicaciones industriales, han encontrado un amplio campo de
aplicación en actividades como la arqueología, arquitectura y la ingeniería, las nubes de puntos
producidas por los escáneres 3D pueden ser utilizadas directamente para la medición y la
visualización.
Este proyecto tiene como finalidad realizar el procesamiento de la información obtenida en un
levantamiento con escáner láser en puentes peatonales, desde el suministro de los datos hasta la
entrega de un modelo tridimensional, teniendo en cuenta aspectos como su estructura, sistema de
georreferenciación, formatos compatibles, limpieza y reconstrucción, orientada a un modelo que
pueda servir como insumo en la metodología BIM (Building Information Modeling).
19
Capítulo 1 MARCO TEÓRICO.
1.1 Tecnología LIDAR.
LIDAR es el acrónimo de (Light Detection and Ranging), es decir, detección por luz y
distancia. Se trata de un sistema láser que permite medir la distancia entre el punto de emisión de
ese láser hasta un objeto o superficie. El tiempo que tarda ese láser en llegar a su objetivo y volver
del mismo, es lo que nos dice la distancia entre los dos puntos. El resultado es que se puede obtener
un mapa en 3D de alta resolución para conocer el terreno en cuestión. (Martínez, 2017)
¿Cómo funciona LIDAR?
LIDAR sigue un principio sencillo: arrojar luz láser a un objeto en la superficie terrestre y
calcular el tiempo que tarda en volver a la fuente LIDAR. Dada la velocidad a la que viaja la luz
(aproximadamente 186.000 millas por segundo), el proceso de medición de la distancia exacta a
través de LIDAR parece ser increíblemente rápido. Sin embargo, es muy técnico. (Franzpc, 2019).
20
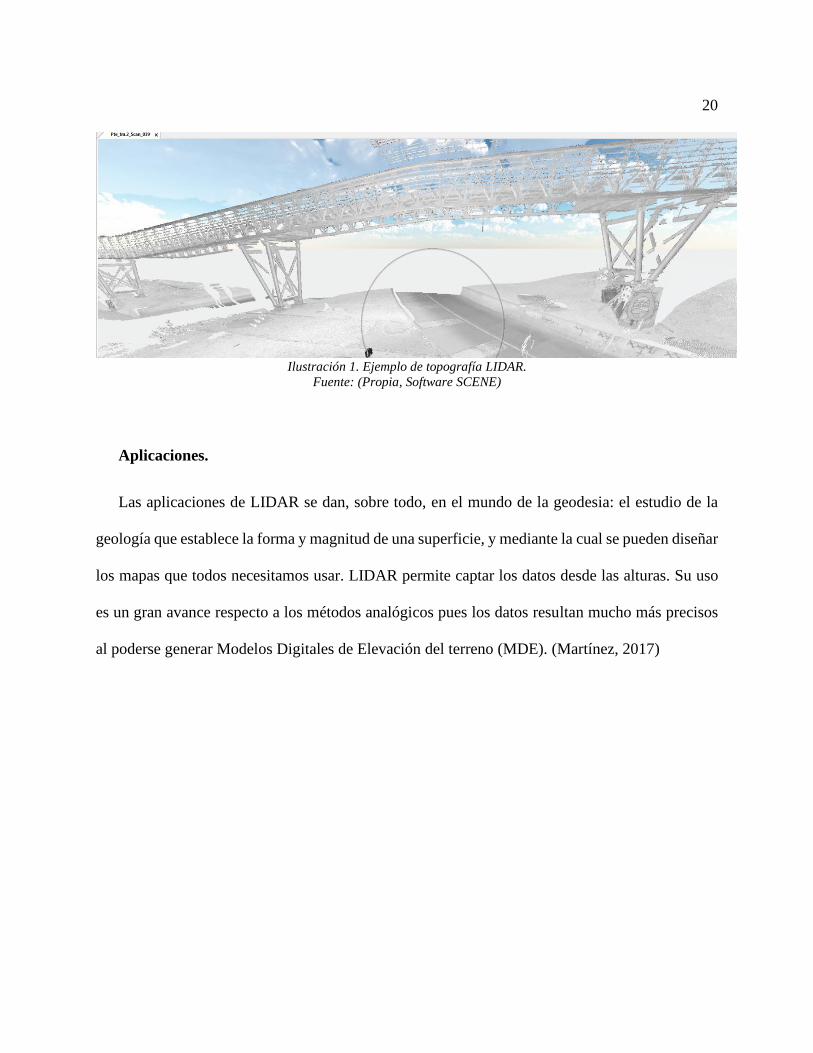
Ilustración 1. Ejemplo de topografía LIDAR.
Fuente: (Propia, Software SCENE)
Aplicaciones.
Las aplicaciones de LIDAR se dan, sobre todo, en el mundo de la geodesia: el estudio de la
geología que establece la forma y magnitud de una superficie, y mediante la cual se pueden diseñar
los mapas que todos necesitamos usar. LIDAR permite captar los datos desde las alturas. Su uso
es un gran avance respecto a los métodos analógicos pues los datos resultan mucho más precisos
al poderse generar Modelos Digitales de Elevación del terreno (MDE). (Martínez, 2017)
21
Oceanografía.
Cuando las autoridades quieren conocer la profundidad exacta de la superficie del océano para
localizar cualquier objeto en caso de accidente marítimo o con fines de investigación, utilizan la
tecnología LIDAR para cumplir su misión. Además de la localización de objetos, el LIDAR
también se utiliza para calcular la fluorescencia de fitoplancton y la biomasa en la superficie del
océano, lo que constituye un gran reto. (Franzpc, 2019).
Ilustración 2.Oceanografía.
Fuente: (Geomares, Hidrología, Oceanografía y geofísica marina)
22
Modelo digital de elevación o terreno.
Las elevaciones del terreno juegan un papel crucial durante la construcción de carreteras,
grandes edificios y puentes. La tecnología LIDAR tiene coordenadas x, y y z, lo que hace
increíblemente fácil producir la representación en 3D de las elevaciones para asegurar que las
partes interesadas puedan sacar las conclusiones necesarias con mayor facilidad. (Franzpc,2019).
Ilustración 3. Modelo de elevación digital.
Fuente: (avSAN, modelos digitales de elevación)
23
Agricultura y Arqueología.
Las aplicaciones típicas de la tecnología LIDAR en el sector agrícola incluyen el análisis de
las tasas de rendimiento, la exploración de cultivos y la dispersión de semillas. Además de esto,
también se utiliza para la planificación de campañas, mapeo bajo el dosel del bosque, y más.
(Franzpc, 2019).
Ilustración 4. Agricultura.
Fuente: (LIDAR and Radar information, 2017)
Tipos de sistemas LIDAR.
Los sistemas LIDAR se dividen en dos tipos según su funcionalidad: LIDAR aerotransportado
y LIDAR terrestre.
24
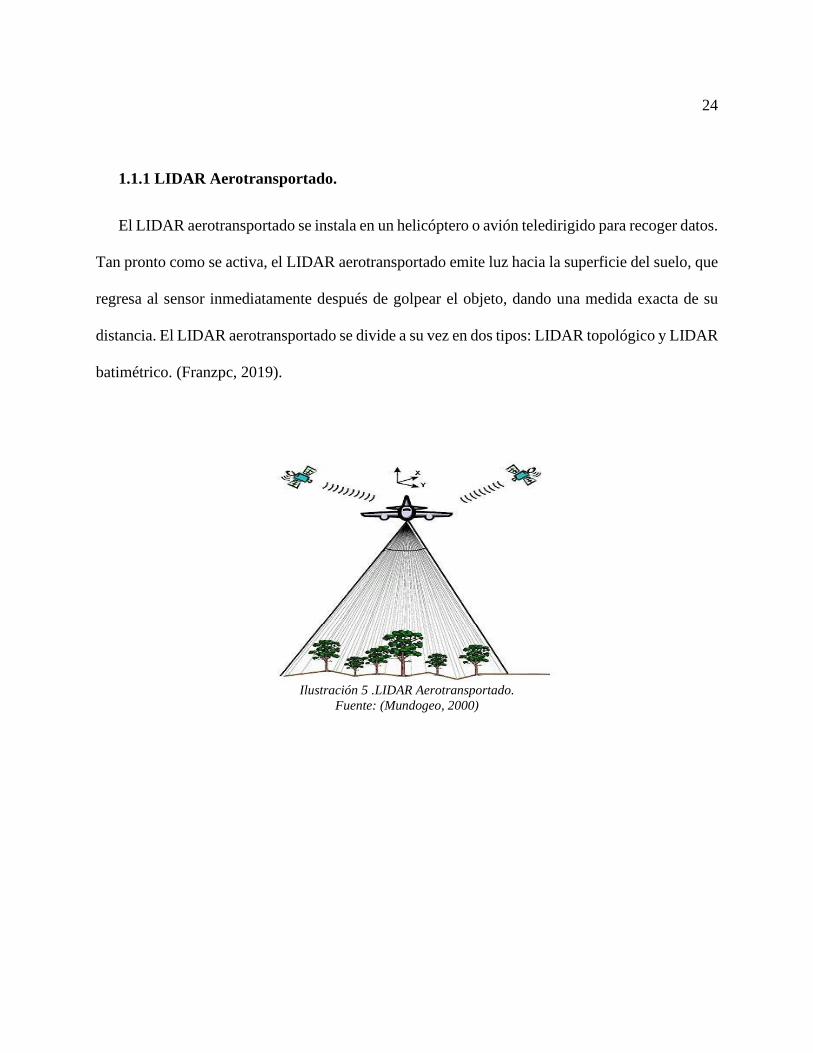
1.1.1 LIDAR Aerotransportado.
El LIDAR aerotransportado se instala en un helicóptero o avión teledirigido para recoger datos.
Tan pronto como se activa, el LIDAR aerotransportado emite luz hacia la superficie del suelo, que
regresa al sensor inmediatamente después de golpear el objeto, dando una medida exacta de su
distancia. El LIDAR aerotransportado se divide a su vez en dos tipos: LIDAR topológico y LIDAR
batimétrico. (Franzpc, 2019).
Ilustración 5 .LIDAR Aerotransportado.
Fuente: (Mundogeo, 2000)
25
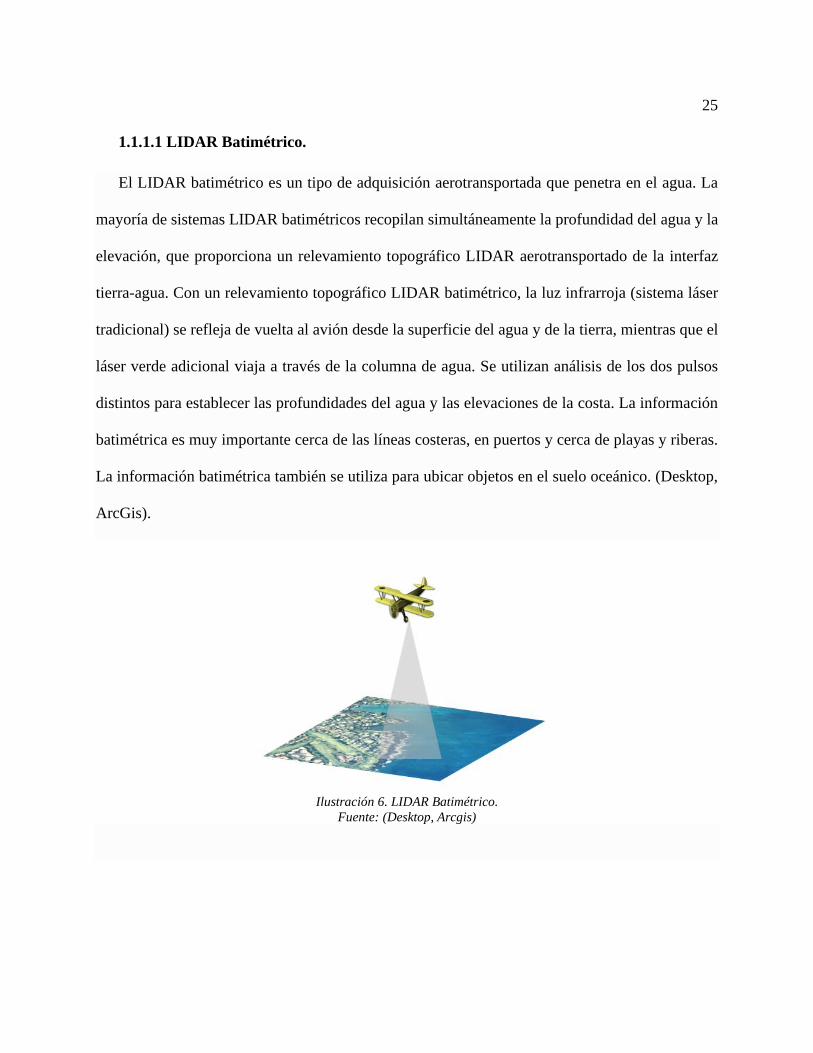
1.1.1.1 LIDAR Batimétrico.
El LIDAR batimétrico es un tipo de adquisición aerotransportada que penetra en el agua. La
mayoría de sistemas LIDAR batimétricos recopilan simultáneamente la profundidad del agua y la
elevación, que proporciona un relevamiento topográfico LIDAR aerotransportado de la interfaz
tierra-agua. Con un relevamiento topográfico LIDAR batimétrico, la luz infrarroja (sistema láser
tradicional) se refleja de vuelta al avión desde la superficie del agua y de la tierra, mientras que el
láser verde adicional viaja a través de la columna de agua. Se utilizan análisis de los dos pulsos
distintos para establecer las profundidades del agua y las elevaciones de la costa. La información
batimétrica es muy importante cerca de las líneas costeras, en puertos y cerca de playas y riberas.
La información batimétrica también se utiliza para ubicar objetos en el suelo oceánico. (Desktop,
ArcGis).
Ilustración 6. LIDAR Batimétrico.
Fuente: (Desktop, Arcgis)
26
1.1.1.2 LIDAR Topológico.
El LIDAR topológico se puede utilizar para derivar modelos de superficie para usar en varias
aplicaciones como silvicultura, hidrología, geomorfología, planificación urbana, ecología del
paisaje, ingeniería costera, evaluaciones de relevamiento topográfico y cálculos volumétricos.
(Desktop, ArcGis).
Ilustración 7.LIDAR Topológico.
Fuente: (Desktop, Arcgis)
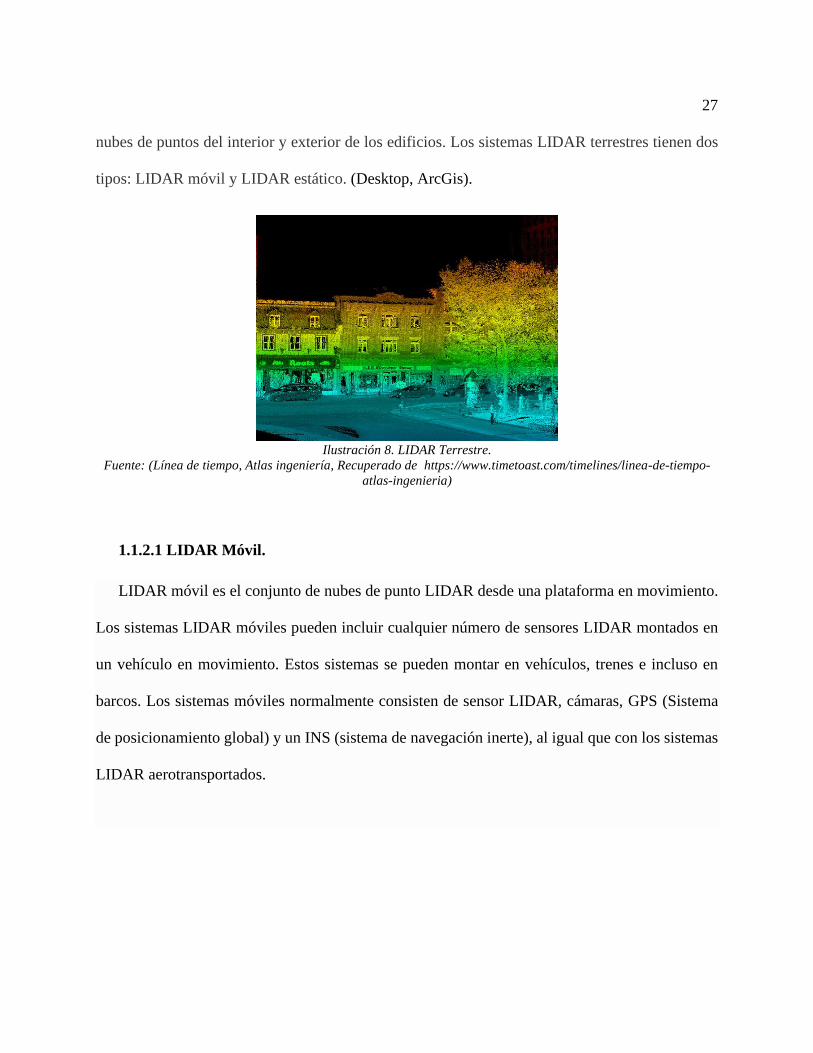
1.1.2 LIDAR Terrestre.
A diferencia de los aerotransportados, los sistemas LIDAR terrestres se instalan en vehículos
en movimiento o trípodes en la superficie terrestre para recoger puntos de datos precisos. Estos
son bastante comunes para observar las carreteras, analizar la infraestructura o incluso recoger
27
nubes de puntos del interior y exterior de los edificios. Los sistemas LIDAR terrestres tienen dos
tipos: LIDAR móvil y LIDAR estático. (Desktop, ArcGis).
Ilustración 8. LIDAR Terrestre.
Fuente: (Línea de tiempo, Atlas ingeniería, Recuperado de https://www.timetoast.com/timelines/linea-de-tiempo-
atlas-ingenieria)
1.1.2.1 LIDAR Móvil.
LIDAR móvil es el conjunto de nubes de punto LIDAR desde una plataforma en movimiento.
Los sistemas LIDAR móviles pueden incluir cualquier número de sensores LIDAR montados en
un vehículo en movimiento. Estos sistemas se pueden montar en vehículos, trenes e incluso en
barcos. Los sistemas móviles normalmente consisten de sensor LIDAR, cámaras, GPS (Sistema
de posicionamiento global) y un INS (sistema de navegación inerte), al igual que con los sistemas
LIDAR aerotransportados.
28
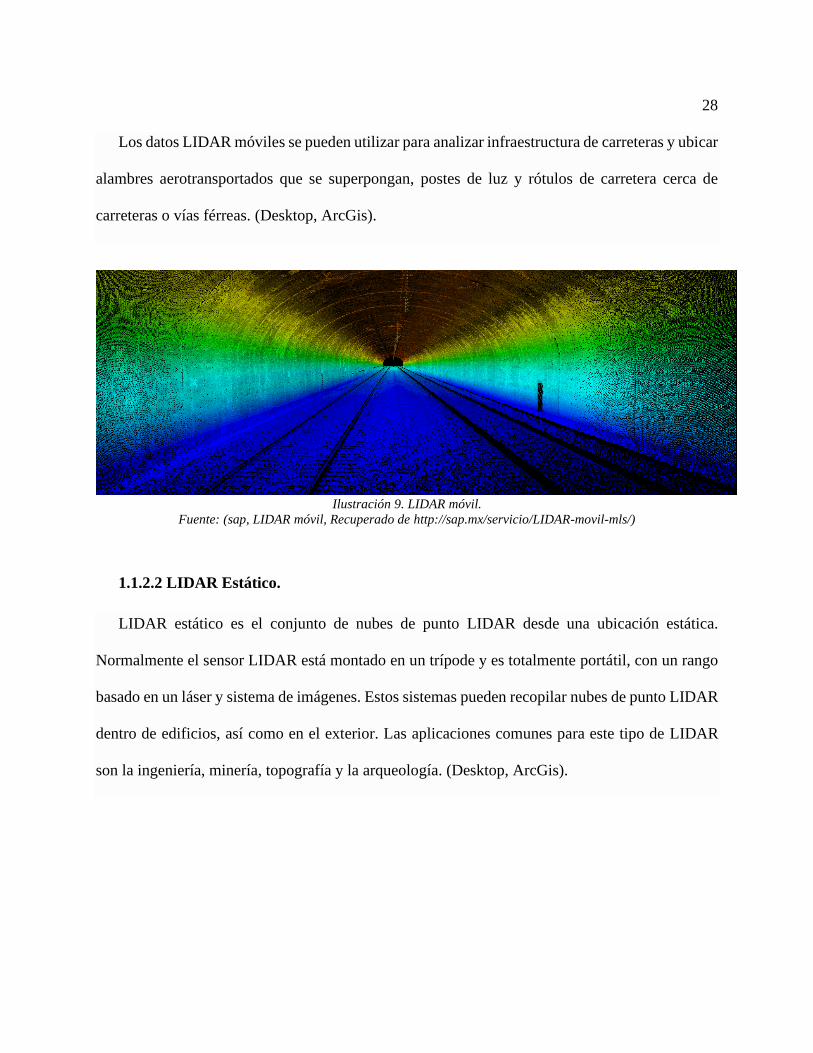
Los datos LIDAR móviles se pueden utilizar para analizar infraestructura de carreteras y ubicar
alambres aerotransportados que se superpongan, postes de luz y rótulos de carretera cerca de
carreteras o vías férreas. (Desktop, ArcGis).
Ilustración 9. LIDAR móvil.
Fuente: (sap, LIDAR móvil, Recuperado de http://sap.mx/servicio/LIDAR-movil-mls/)
1.1.2.2 LIDAR Estático.
LIDAR estático es el conjunto de nubes de punto LIDAR desde una ubicación estática.
Normalmente el sensor LIDAR está montado en un trípode y es totalmente portátil, con un rango
basado en un láser y sistema de imágenes. Estos sistemas pueden recopilar nubes de punto LIDAR
dentro de edificios, así como en el exterior. Las aplicaciones comunes para este tipo de LIDAR
son la ingeniería, minería, topografía y la arqueología. (Desktop, ArcGis).

29
Ilustración 10. LIDAR Estático.
Fuente: (Cartografía de actividades extractivas a partir de datos LIDAR, 2017)
1.2 Escáner Láser.
El escáner láser 3D es un dispositivo de adquisición de datos masivos, basado en la tecnología
LIDAR, que nos reporta una nube de puntos tridimensional (representación discreta) de una
superficie continua, a partir de la medición de distancias y ángulo, mediante un rayo de luz láser.
Ello nos permite documentar geométrica y visualmente una realidad física con gran detalle, rapidez
y precisión. Si adicionalmente se recoge la información del color en cada punto, se puede
determinar y reproducir el color de la superficie representada. (Instop, 2018).
El escáner láser 3D captura las coordenadas geográficas de todas las superficies que lo rodean
en un radio limitado, en cuestión de minutos y sin contacto con los elementos medidos. Además,
30
cuenta con la incorporación cámaras fotográficas, que registran la información del rango visible,
lo que aporta una información infinita del objeto. (Instop, 2018).
El resultado conocido como nube de puntos 3D, es un conjunto de millones de coordenadas
(x,y,z), posicionadas en el espacio y en verdadera magnitud, que representan con rigor y precisión
la realidad escaneada.
1.2.1 Principios de Medición.
Los principios de medición de los actuales escáneres láser se basan en tres principios:
triangulación, tiempo de vuelo mediante pulsos y tiempo de vuelo mediante diferencia de fase.
31
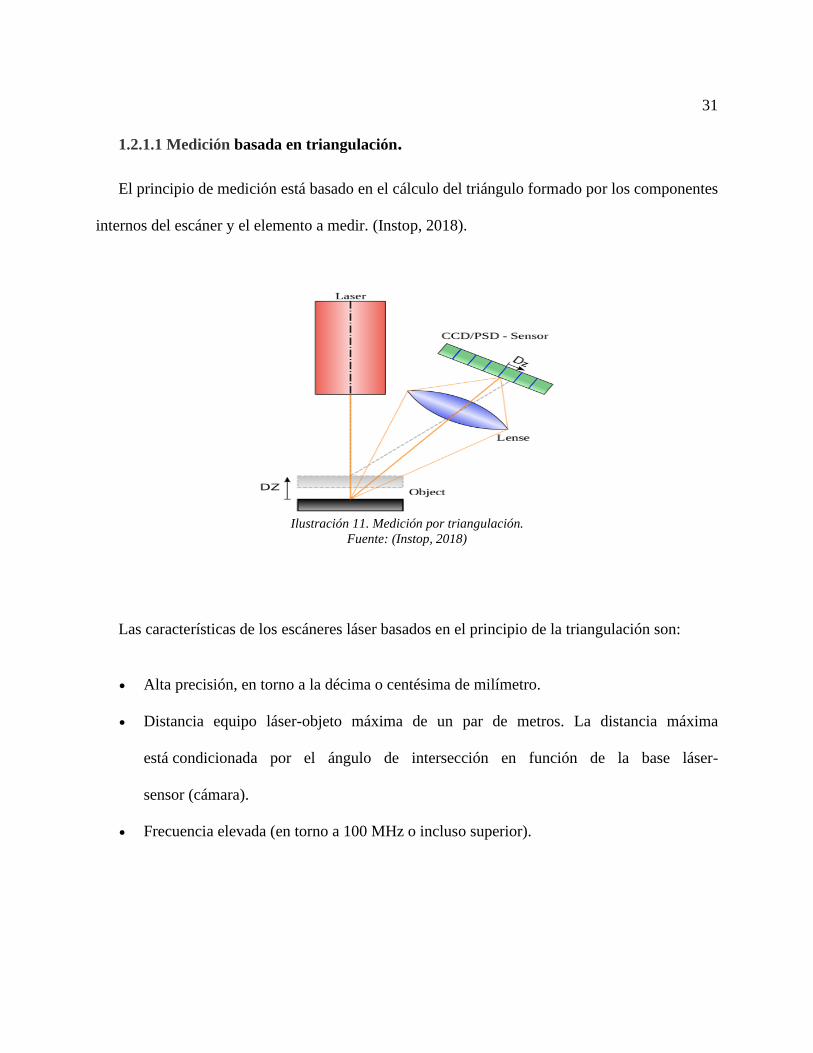
1.2.1.1 Medición basada en triangulación.
El principio de medición está basado en el cálculo del triángulo formado por los componentes
internos del escáner y el elemento a medir. (Instop, 2018).
Ilustración 11. Medición por triangulación.
Fuente: (Instop, 2018)
Las características de los escáneres láser basados en el principio de la triangulación son:
• Alta precisión, en torno a la décima o centésima de milímetro.
• Distancia equipo láser-objeto máxima de un par de metros. La distancia máxima
está condicionada por el ángulo de intersección en función de la base láser-
sensor (cámara).
• Frecuencia elevada (en torno a 100 MHz o incluso superior).
32
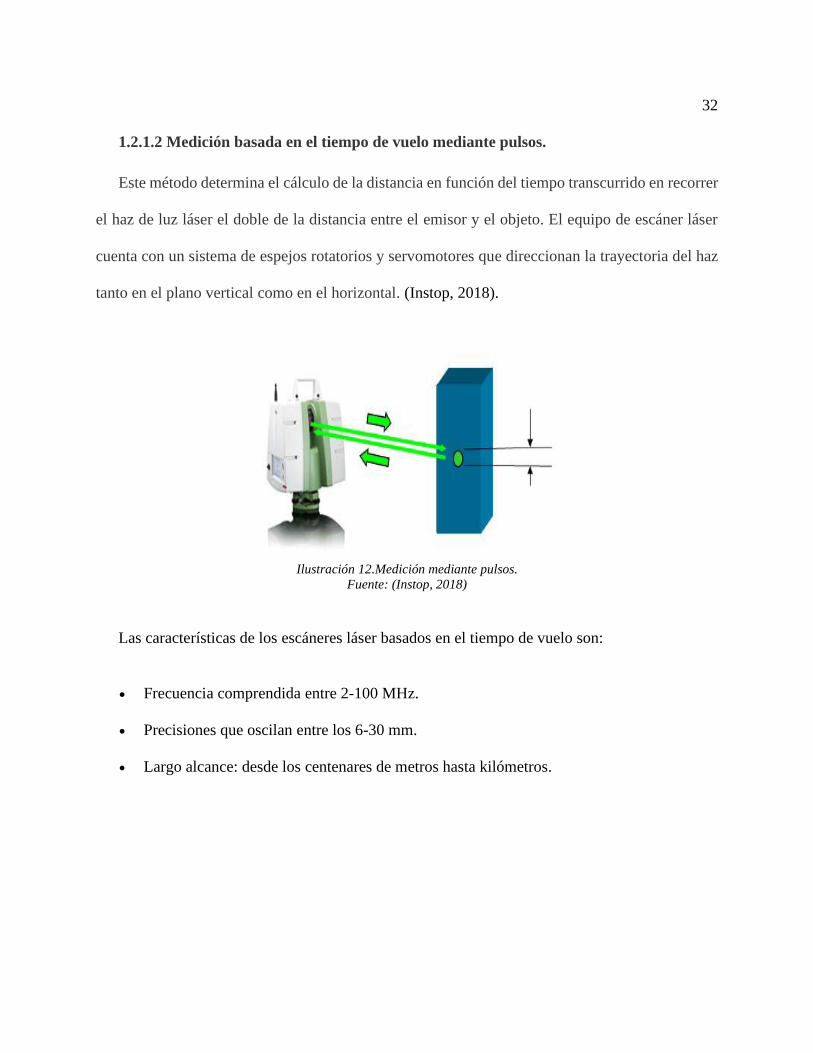
1.2.1.2 Medición basada en el tiempo de vuelo mediante pulsos.
Este método determina el cálculo de la distancia en función del tiempo transcurrido en recorrer
el haz de luz láser el doble de la distancia entre el emisor y el objeto. El equipo de escáner láser
cuenta con un sistema de espejos rotatorios y servomotores que direccionan la trayectoria del haz
tanto en el plano vertical como en el horizontal. (Instop, 2018).
Ilustración 12.Medición mediante pulsos.
Fuente: (Instop, 2018)
Las características de los escáneres láser basados en el tiempo de vuelo son:
• Frecuencia comprendida entre 2-100 MHz.
• Precisiones que oscilan entre los 6-30 mm.
• Largo alcance: desde los centenares de metros hasta kilómetros.
33
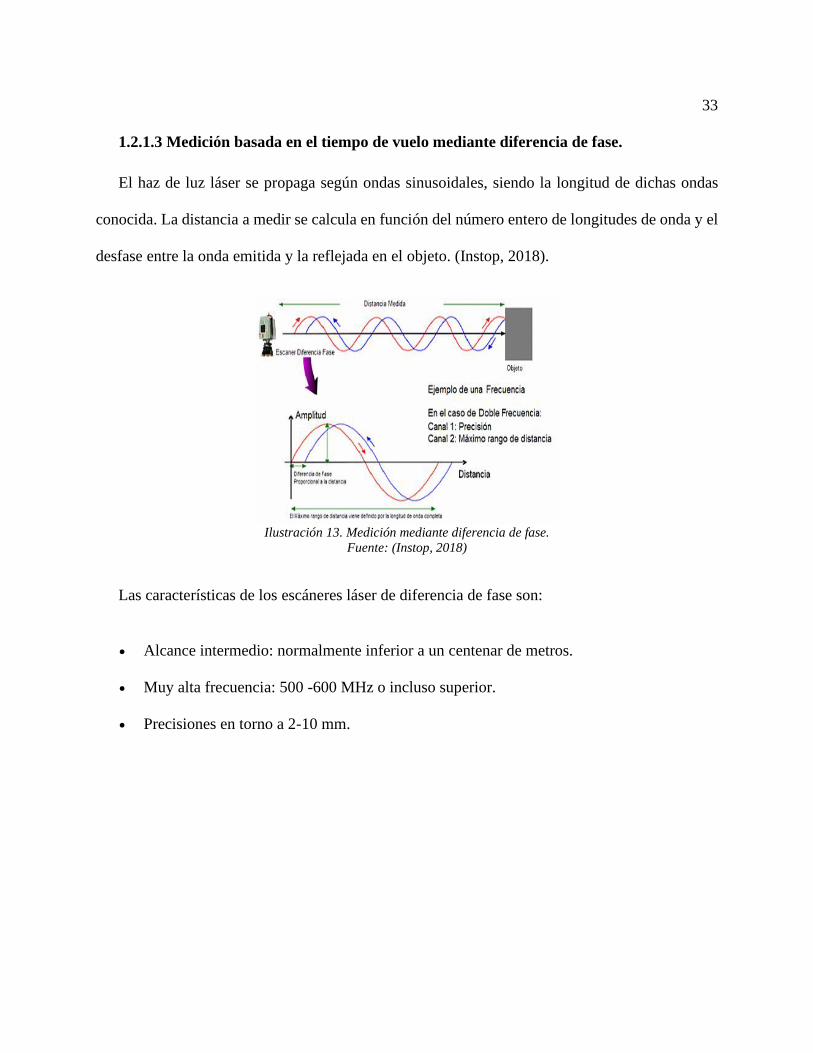
1.2.1.3 Medición basada en el tiempo de vuelo mediante diferencia de fase.
El haz de luz láser se propaga según ondas sinusoidales, siendo la longitud de dichas ondas
conocida. La distancia a medir se calcula en función del número entero de longitudes de onda y el
desfase entre la onda emitida y la reflejada en el objeto. (Instop, 2018).
Ilustración 13. Medición mediante diferencia de fase.
Fuente: (Instop, 2018)
Las características de los escáneres láser de diferencia de fase son:
• Alcance intermedio: normalmente inferior a un centenar de metros.
• Muy alta frecuencia: 500 -600 MHz o incluso superior.
• Precisiones en torno a 2-10 mm.
34
1.2.2 Tipos de Escáner Laser.
A continuación, se pueden apreciar los escáneres y sus especificaciones los cuales son los más
utilizados y recomendados para el campo de la ingeniería.
ESCÁNER LASER MDL
Ilustración 14. Escáner laser MDL.
Fuente: (ResearchGate)
35
• El láser escáner MDL es el más barato que existe cuyo valor es de unos 90000 euros.
• Tiene un rango de entre 150 y 500 metros, con una precisión de +-5cm.
• El equipo se puede transportar fácilmente como puede ser el ingreso de equipaje en
aerolíneas de aviones civiles ya que posee un tamaño y un peso pequeño.
• Se puede instalar el equipo en cualquier vehículo o embarcación disponible en el sitio
de trabajo, de esta forma se puede acceder a sitios limitados o difíciles como pueden
ser zonas boscosas, parques, caminos estrechos etc.
• No necesita una calibración in-sito viene calibrado de fábrica y alineado.
• Los errores no tienen ningún efecto sobre los datos de la nube de puntos que cada uno
se corrige de forma dinámica con el GPS y el INSS.
• Tiene una gran durabilidad ya que no posee espejos giratorios y no tiene mecanismos
de escaneado dedicados.
• Tiene una resolución espacial de 30 Hz y es capaz de tomar unos 36000 puntos por
segundo. (ResearchGate).
36
ESCÁNER LÁSER LYNX
Ilustración 15. Escáner Laser Lynx.
Fuente: (Microgeo)
• El láser escáner LYNX es casi de los mejores que existe en el mercado con un valor
de 400.000 euros.
• Tiene un calibrado y refinado espacialmente.
• Tiene una precisión de 5 cm. Es capaz de medir 1.000.000 puntos por segundo.
• El campo de visión es de unos 360º con una resolución de 1 cm.
• Este láser ofrece una gran cantidad de detalles en 3D a velocidades de hasta 100 km/h.
• Se monta encima del coche alojando los dos sensores LIDAR orientados, así como la
plataforma para el sistema IMU y las antenas GPS es un sistema rígido que garantiza
la precisión entre los sensores y la navegación en el equipo se mantiene.
37
• Posee el Applanix POS/LV 420 que se utiliza para corregir la orientación y la
posición de los dos sensores de generación automáticamente o completo geo-
referenciada de nube de puntos. El POS contiene 3 acelerómetros y tres giroscopios
que miden la aceleración y velocidad angular necesaria para el cálculo de todos los
aspectos del movimiento del vehículo; posición, aceleración rotación y orientación.
• Este escáner tiene que ser calibrado una vez que se haya montado en el vehículo.
(Microgeo).
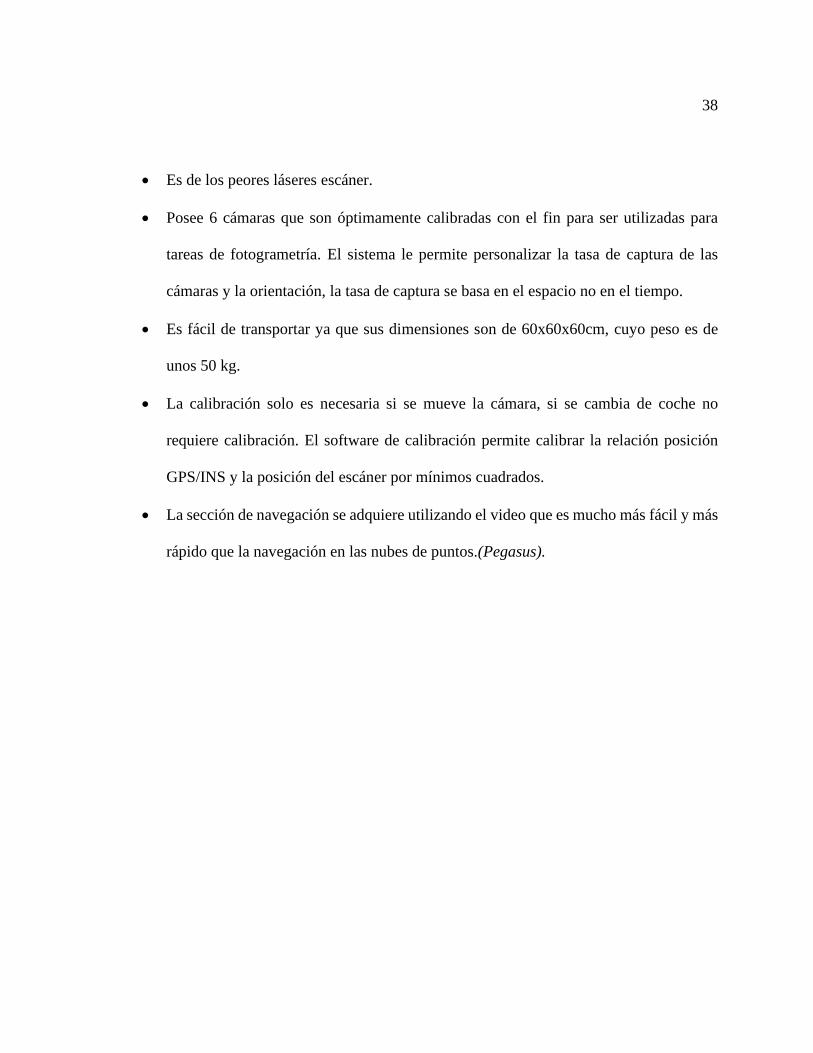
ESCÁNER LÁSER PEGASUS SM 70.
Ilustración 16. Escáner Laser Pegasus SM 70.
Fuente: (Pegasus)
38
• Es de los peores láseres escáner.
• Posee 6 cámaras que son óptimamente calibradas con el fin para ser utilizadas para
tareas de fotogrametría. El sistema le permite personalizar la tasa de captura de las
cámaras y la orientación, la tasa de captura se basa en el espacio no en el tiempo.
• Es fácil de transportar ya que sus dimensiones son de 60x60x60cm, cuyo peso es de
unos 50 kg.
• La calibración solo es necesaria si se mueve la cámara, si se cambia de coche no
requiere calibración. El software de calibración permite calibrar la relación posición
GPS/INS y la posición del escáner por mínimos cuadrados.
• La sección de navegación se adquiere utilizando el video que es mucho más fácil y más
rápido que la navegación en las nubes de puntos.(Pegasus).
39
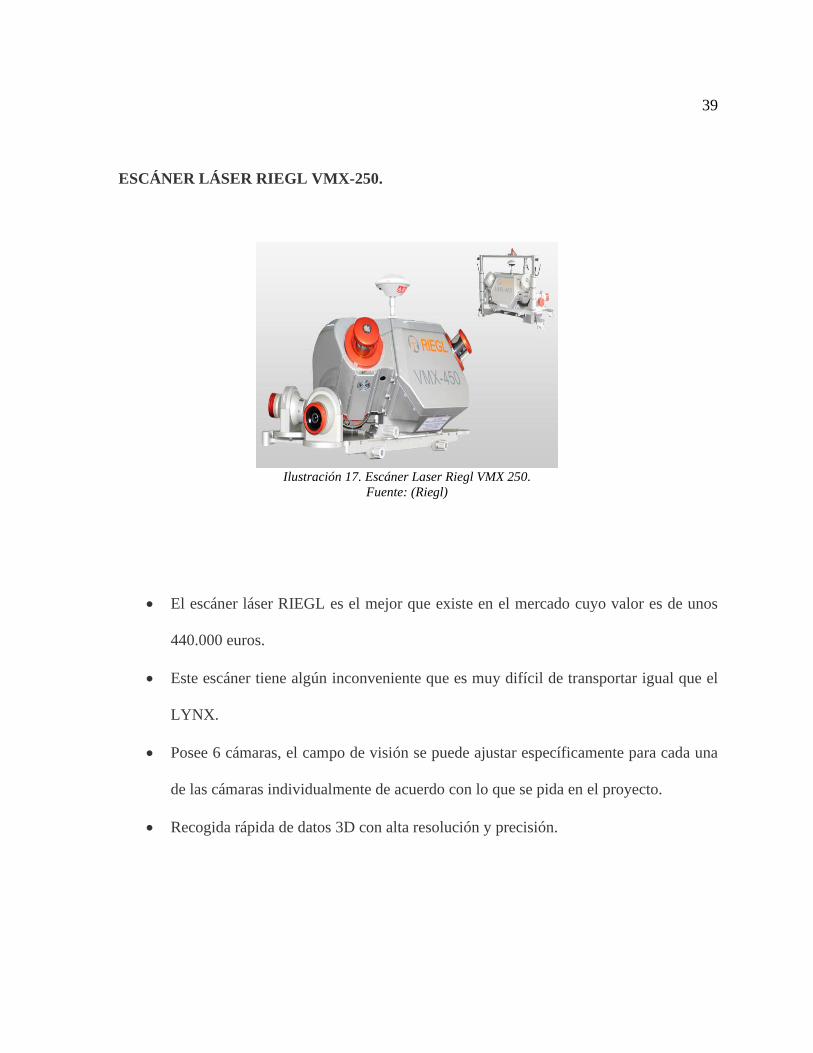
ESCÁNER LÁSER RIEGL VMX-250.
Ilustración 17. Escáner Laser Riegl VMX 250.
Fuente: (Riegl)
• El escáner láser RIEGL es el mejor que existe en el mercado cuyo valor es de unos
440.000 euros.
• Este escáner tiene algún inconveniente que es muy difícil de transportar igual que el
LYNX.
• Posee 6 cámaras, el campo de visión se puede ajustar específicamente para cada una
de las cámaras individualmente de acuerdo con lo que se pida en el proyecto.
• Recogida rápida de datos 3D con alta resolución y precisión.
40
• Tiene un alcance de hasta 500metros.
• Es capaz de realizar hasta 200 líneas por segundo, siendo la medición de la frecuencia
de 600000 puntos por segundo.
• Para calibrarlo se tiene que calibrar en fábrica, por lo tanto, eso es un poco caro.
• Este láser posee un bajo nivel de ruido, y tiene un giro de 360º. (Riegl)
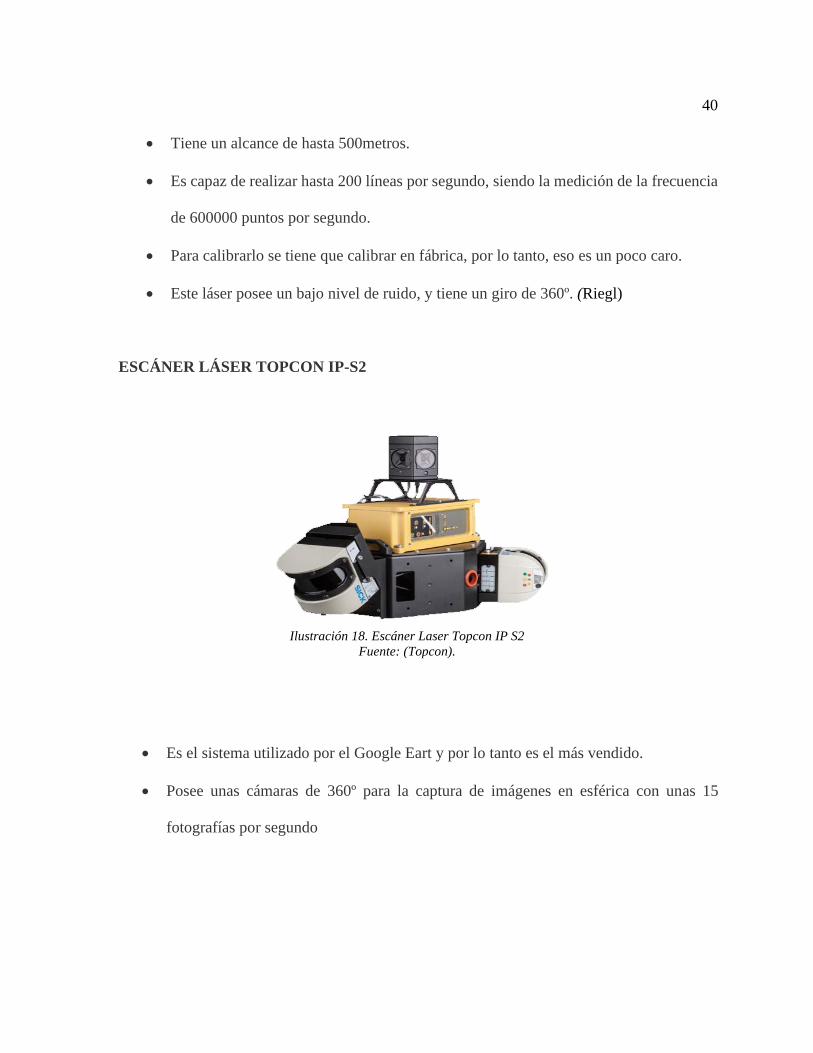
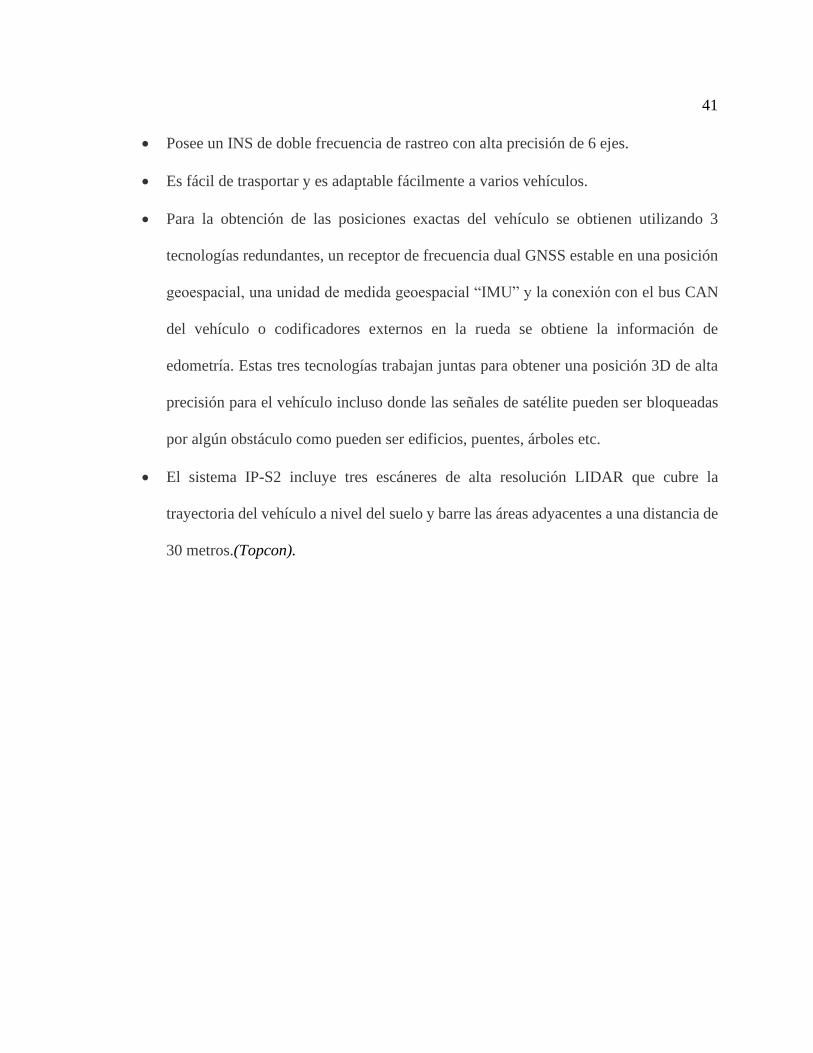
ESCÁNER LÁSER TOPCON IP-S2
Ilustración 18. Escáner Laser Topcon IP S2
Fuente: (Topcon).
• Es el sistema utilizado por el Google Eart y por lo tanto es el más vendido.
• Posee unas cámaras de 360º para la captura de imágenes en esférica con unas 15
fotografías por segundo
41
• Posee un INS de doble frecuencia de rastreo con alta precisión de 6 ejes.
• Es fácil de trasportar y es adaptable fácilmente a varios vehículos.
• Para la obtención de las posiciones exactas del vehículo se obtienen utilizando 3
tecnologías redundantes, un receptor de frecuencia dual GNSS estable en una posición
geoespacial, una unidad de medida geoespacial “IMU” y la conexión con el bus CAN
del vehículo o codificadores externos en la rueda se obtiene la información de
edometría. Estas tres tecnologías trabajan juntas para obtener una posición 3D de alta
precisión para el vehículo incluso donde las señales de satélite pueden ser bloqueadas
por algún obstáculo como pueden ser edificios, puentes, árboles etc.
• El sistema IP-S2 incluye tres escáneres de alta resolución LIDAR que cubre la
trayectoria del vehículo a nivel del suelo y barre las áreas adyacentes a una distancia de
30 metros.(Topcon).
42
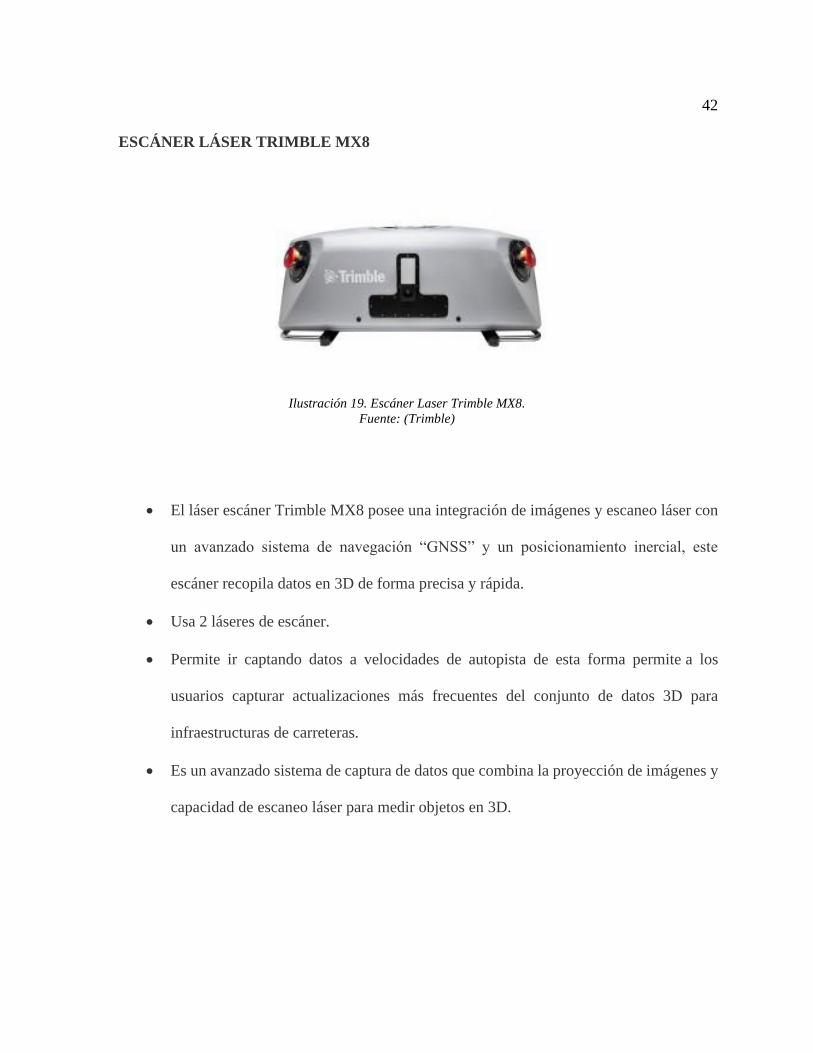
ESCÁNER LÁSER TRIMBLE MX8
Ilustración 19. Escáner Laser Trimble MX8.
Fuente: (Trimble)
• El láser escáner Trimble MX8 posee una integración de imágenes y escaneo láser con
un avanzado sistema de navegación “GNSS” y un posicionamiento inercial, este
escáner recopila datos en 3D de forma precisa y rápida.
• Usa 2 láseres de escáner.
• Permite ir captando datos a velocidades de autopista de esta forma permite a los
usuarios capturar actualizaciones más frecuentes del conjunto de datos 3D para
infraestructuras de carreteras.
• Es un avanzado sistema de captura de datos que combina la proyección de imágenes y
capacidad de escaneo láser para medir objetos en 3D.

43
• Combinado con el software permite realizar líneas de rotura del vial, extracción
automatizada de señales de tráfico.
• Por lo tanto, captura datos georreferenciados, extrae características y atributos.
(Trimble).
1.2.3 Faro Focus 3D
Ilustración 20. Escáner Laser Faro Focus 3D.
Fuente: (Faro, 2013).
1.2.3.1 Características.
Las principales características son:
• Hypermodulationtm.
• Alta precisión.
• Alta resolución.
44
• Alta velocidad.
• Control intuitivo a través de la pantalla táctil incorporada.
• Gran movilidad gracias a su tamaño reducido, peso liviano y a la batería de carga rápida
integrada.
• Escaneos 3D con color foto realistas gracias a la cámara color integrada.
• Compensador de eje doble integrado para nivelar automáticamente los datos de escaneo
capturados.
• Brújula y altímetro integrados para dar a los escaneos información sobre orientación y altura.
• Red WLAN para controlar el escáner de manera remota.
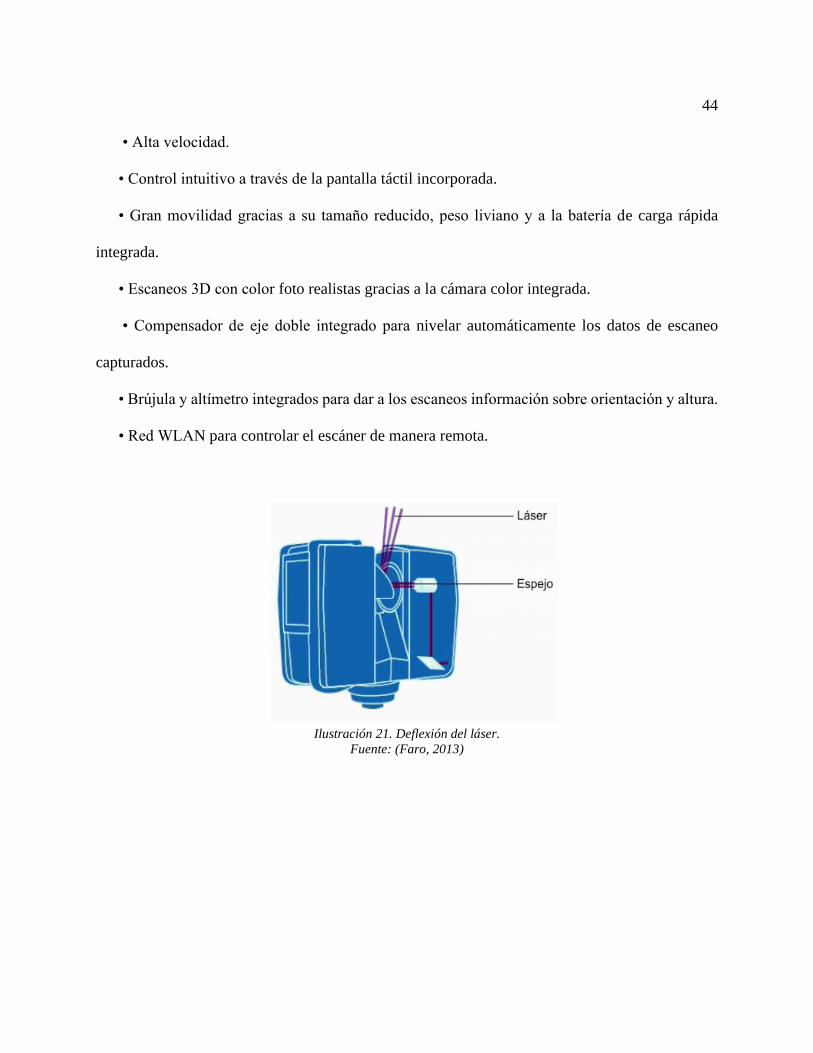
Ilustración 21. Deflexión del láser.
Fuente: (Faro, 2013)
45
El Focus3D funciona por medio del envío de un haz de láser infrarrojo hacia el centro de un
espejo giratorio. El espejo desvía el láser en rotación vertical alrededor del entorno que se escanea,
y luego la luz dispersada de los objetos circundantes se refleja en el escáner. (Faro, 2013).
1.2.3.2 Funcionamiento.
La distancia del escáner al objeto se determina con exactitud al medir los desfasajes en las
ondas de luz infrarroja. Las coordenadas X, Y y Z de cada punto se calculan utilizando
codificadores de ángulos para medir la rotación del espejo y la rotación horizontal del Focus3D.
Estos ángulos se codifican simultáneamente con la medición de la distancia. La distancia, el
ángulo vertical y el ángulo horizontal forman una coordenada polar (δ, α, β), que luego se
transforma en una coordenada cartesiana (x, y, z).
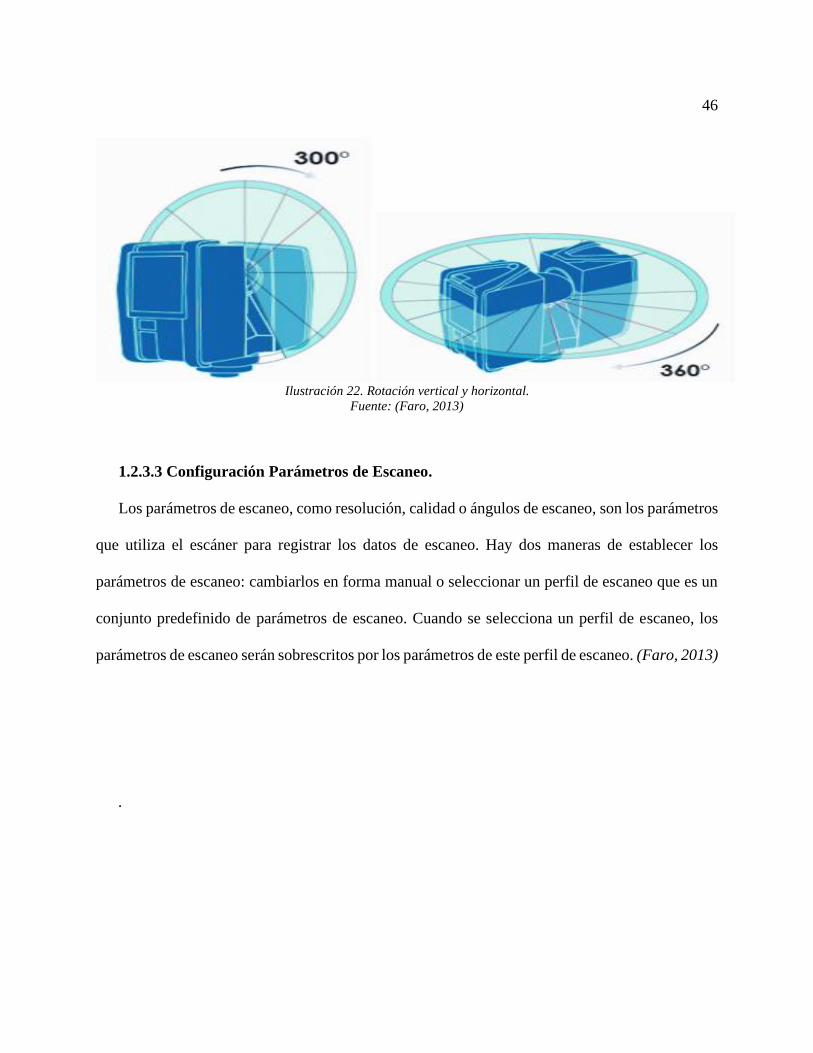
El escáner cubre un campo de visión de 360° x 300°. Los escaneos láser se registran en una
tarjeta de memoria SD extraíble y se pueden Transferir fácilmente a SCENE, el software de
manipulación de nube de puntos De FARO. (Faro, 2013).
46
Ilustración 22. Rotación vertical y horizontal.
Fuente: (Faro, 2013)
1.2.3.3 Configuración Parámetros de Escaneo.
Los parámetros de escaneo, como resolución, calidad o ángulos de escaneo, son los parámetros
que utiliza el escáner para registrar los datos de escaneo. Hay dos maneras de establecer los
parámetros de escaneo: cambiarlos en forma manual o seleccionar un perfil de escaneo que es un
conjunto predefinido de parámetros de escaneo. Cuando se selecciona un perfil de escaneo, los
parámetros de escaneo serán sobrescritos por los parámetros de este perfil de escaneo. (Faro, 2013)
.
47
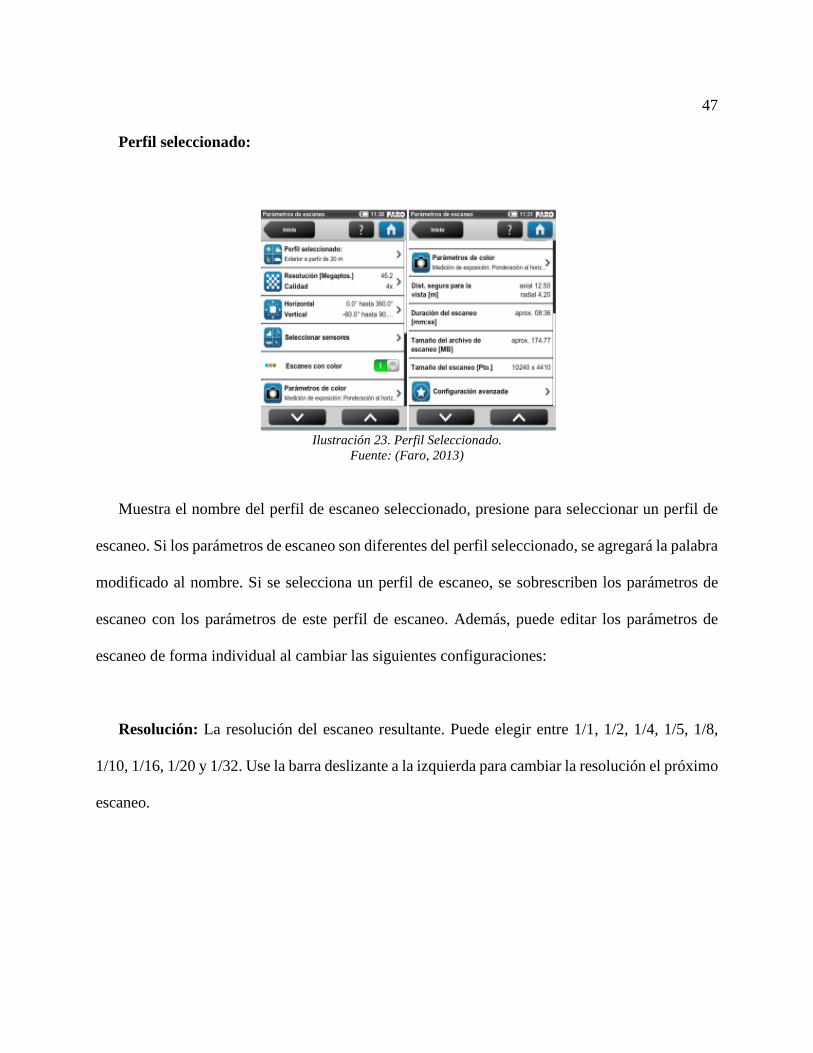
Perfil seleccionado:
Ilustración 23. Perfil Seleccionado.
Fuente: (Faro, 2013)
Muestra el nombre del perfil de escaneo seleccionado, presione para seleccionar un perfil de
escaneo. Si los parámetros de escaneo son diferentes del perfil seleccionado, se agregará la palabra
modificado al nombre. Si se selecciona un perfil de escaneo, se sobrescriben los parámetros de
escaneo con los parámetros de este perfil de escaneo. Además, puede editar los parámetros de
escaneo de forma individual al cambiar las siguientes configuraciones:
Resolución: La resolución del escaneo resultante. Puede elegir entre 1/1, 1/2, 1/4, 1/5, 1/8,
1/10, 1/16, 1/20 y 1/32. Use la barra deslizante a la izquierda para cambiar la resolución el próximo
escaneo.
48
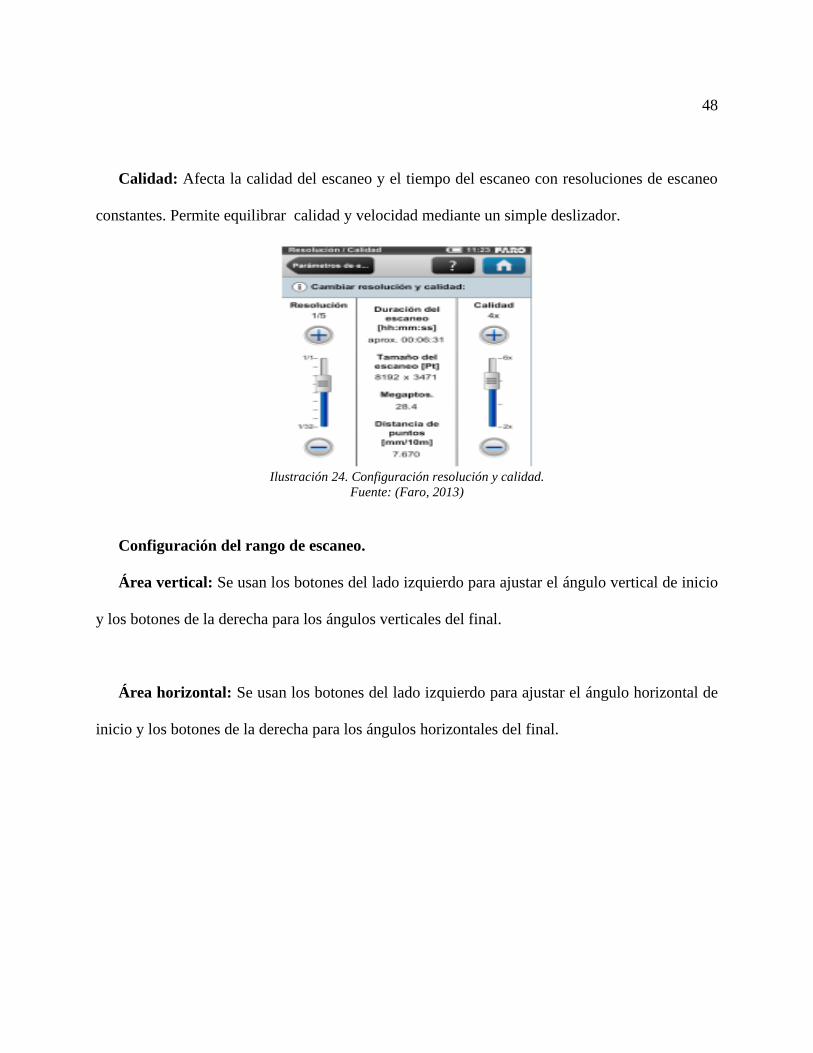
Calidad: Afecta la calidad del escaneo y el tiempo del escaneo con resoluciones de escaneo
constantes. Permite equilibrar calidad y velocidad mediante un simple deslizador.
Ilustración 24. Configuración resolución y calidad.
Fuente: (Faro, 2013)
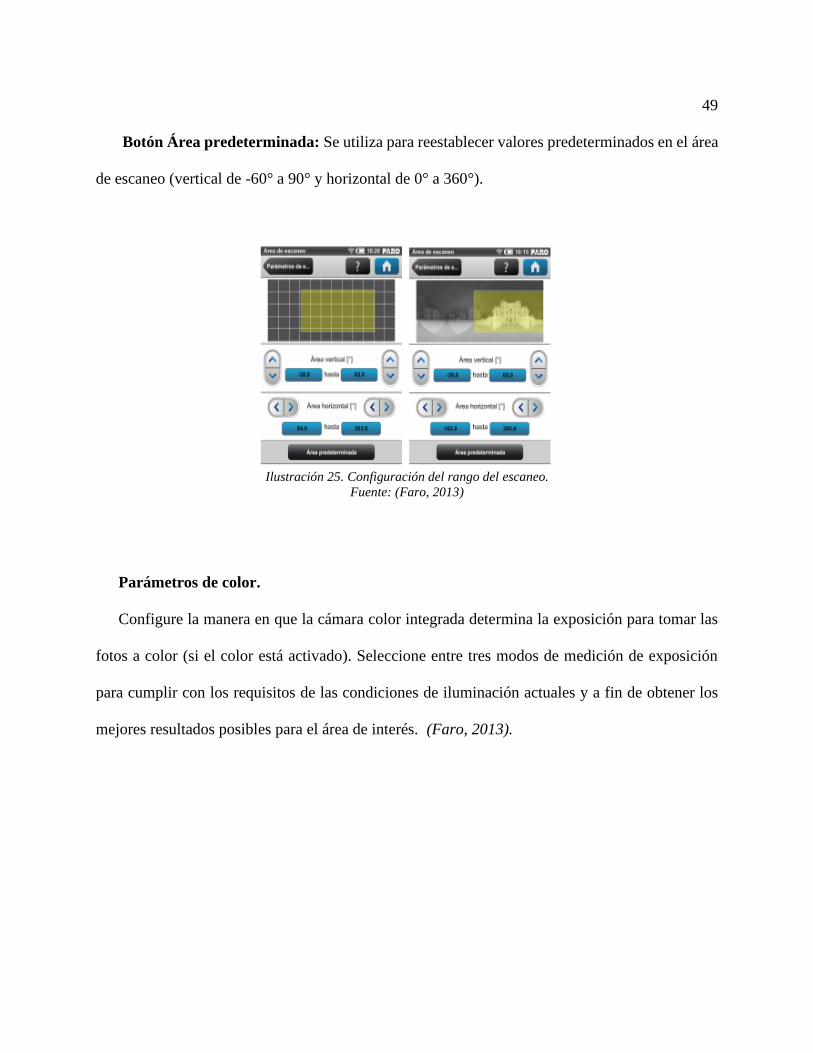
Configuración del rango de escaneo.
Área vertical: Se usan los botones del lado izquierdo para ajustar el ángulo vertical de inicio
y los botones de la derecha para los ángulos verticales del final.
Área horizontal: Se usan los botones del lado izquierdo para ajustar el ángulo horizontal de
inicio y los botones de la derecha para los ángulos horizontales del final.
49
Botón Área predeterminada: Se utiliza para reestablecer valores predeterminados en el área
de escaneo (vertical de -60° a 90° y horizontal de 0° a 360°).
Ilustración 25. Configuración del rango del escaneo.
Fuente: (Faro, 2013)
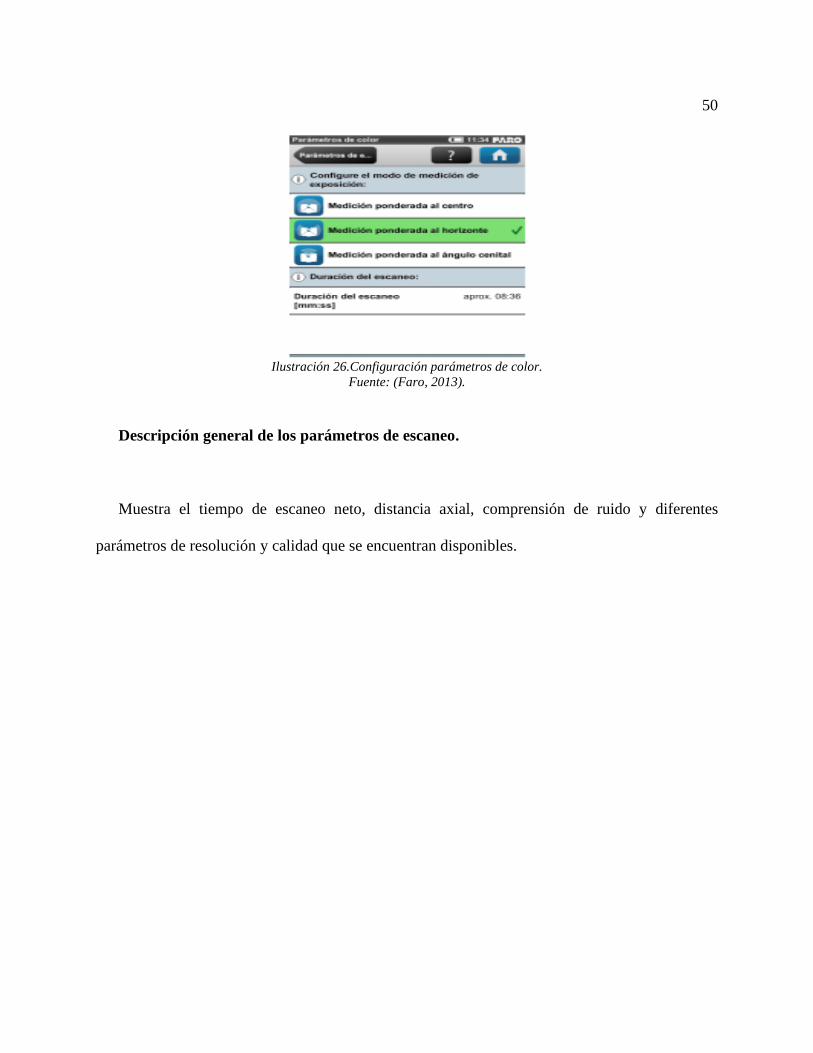
Parámetros de color.
Configure la manera en que la cámara color integrada determina la exposición para tomar las
fotos a color (si el color está activado). Seleccione entre tres modos de medición de exposición
para cumplir con los requisitos de las condiciones de iluminación actuales y a fin de obtener los
mejores resultados posibles para el área de interés. (Faro, 2013).
50
Ilustración 26.Configuración parámetros de color.
Fuente: (Faro, 2013).
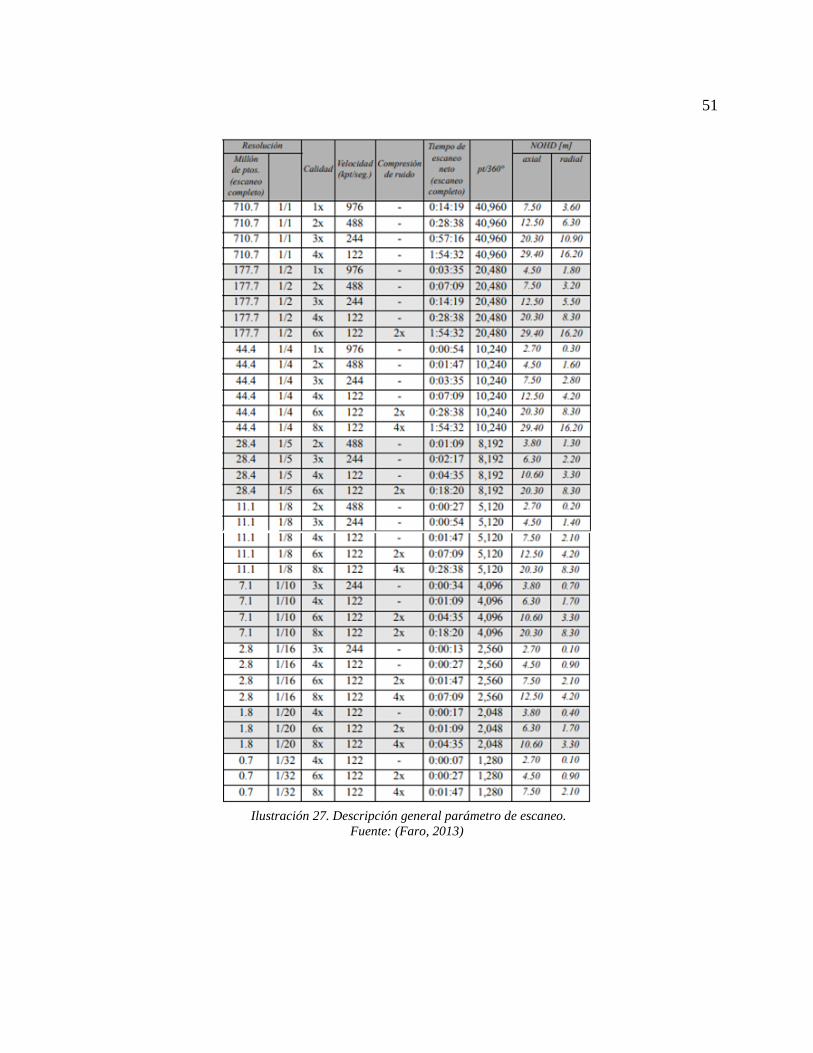
Descripción general de los parámetros de escaneo.
Muestra el tiempo de escaneo neto, distancia axial, comprensión de ruido y diferentes
parámetros de resolución y calidad que se encuentran disponibles.
51
Ilustración 27. Descripción general parámetro de escaneo.
Fuente: (Faro, 2013)

52
1.3 Puentes.
1.3.1 Descripción.
Los puentes son estructuras destinada a salvar obstáculos naturales, como ríos, valles, lagos o
brazos de mar, y obstáculos artificiales, como vías férreas o carreteras, con el fin de poder
transportar mercancías, permitir la circulación de las gentes y trasladar sustancias de un sitio a
otro.
Ilustración 28. Definición de puente.
Fuente: (Dobooku, 2018/)

53
Ilustración 29. Estructura de un puente.
Fuente: (Ingenierocivilinfo, 2012)
Básicamente un puente está formado por 2 partes principales: el tablero y los apoyos.
Normalmente además de estas dos partes también llevan una armadura.
1.3.2 Clasificación por su esquema estructural.
Puentes de arco.
Estos puentes usan el arco como componente estructural principal. Están hechos con una o más
bisagras, dependiendo de qué tipo de carga y fuerzas de estrés deben soportar.
54
Ilustración 30. Puente en Arco.
Fuente: (Ingenierocivilinfo, 2012)
Puentes de vigas.
Tipo muy básico de puentes apoyados por varios travesaños de varias formas y tamaños.
Pueden ser inclinados o en forma de V.
Ilustración 31. Puente de vigas.
Fuente: (Ingenierocivilinfo, 2012)
55
Puentes de armadura.
Diseños de puentes muy populares que usan malla diagonal de postes sobre el puente. Los dos
diseños más comunes son los postes principales (dos postes diagonales soportados por una sola
columna vertical en el centro) y postes principales (dos postes diagonales, dos potes verticales y
postes horizontales que conectan dos postes verticales en la parte superior).
Ilustración 32. Puente en armadura.
Fuente: (Ingenierocivilinfo, 2012)
Puentes colgantes.
Son puentes sostenidos por un arco invertido formado por numerosos cables de acero, del que
se suspende el tablero del puente mediante tirantes verticales. Al igual que el puente de arco, es un
puente que resiste gracias a su forma. Las fuerzas principales en este tipo de puentes son de tracción
en los cables principales y de compresión en los pilares.
56
Ilustración 33. Puente Colgante.
Fuente: ((Ingenierocivilinfo, 2012)
Puentes de suspensión.
Puentes que utilizan cuerdas o cables de la suspensión vertical para soportar el peso de la
cubierta del puente y el tráfico. Ejemplo de puente colgante es Golden Gate Bridge en San
Francisco.
Ilustración 34. Puente Suspendido en Cables.
Fuente: (Ingenierocivilinfo, 2012).
Puentes voladizos.
De apariencia similar a los puentes en arco, pero soportan su carga no a través de los soportes
verticales sino a través de los arrostramientos diagonales. A menudo utilizan la formación de Truss
tanto debajo como encima del puente.
57
Ilustración 35. Puente Voladizo.
Fuente: (Ingenierocivilinfo, 2012)
1.3.3 Clasificación por su función.
Un criterio por el cual se pueden clasificar en según su función y tipo de circulación que este
permita.
Tráfico Rodado.
Los puentes vehiculares son parte de los proyectos y obras de infraestructura de transporte que
favorecen el desarrollo del país, mejoran la movilidad, facilitan la circulación vehicular y conectan
el territorio nacional.

58
Ilustración 36. Puente de tráfico rodado.
Fuente: (Construcción de puentes en Bogotá, Recuperado de http://www.eymproductostecnicos.com/construccion-
de-puentes-en-bogota)
Ferrocarril.
Los puentes ferroviarios son aquellos que tienen la finalidad de ayudarle a los trenes a sobre
pasar obstáculos y fallas geológicas.
Ilustración 37. Puente Ferroviario.
Fuente: (Ladera Sur, Recuperado de https://laderasur.com/articulo/ong-poloc-co-construyendo-el-relato-de-chile-
gracias-a-la-voz-indigena/44-puente-ferroviario-antilhue-medium/)
59
Puentes para paso de poliductos.
Estas estructuras permiten el paso de fluidos como por ejemplo agua, gases, petróleo, etc.
Ilustración 38. Puente para paso de poliductos.
Fuente: (Ladera Sur, Recuperado de https://laderasur.com/articulo/ong-poloc-co-construyendo-el-relato-de-chile-
gracias-a-la-voz-indigena/44-puente-ferroviario-antilhue-medium/)
60
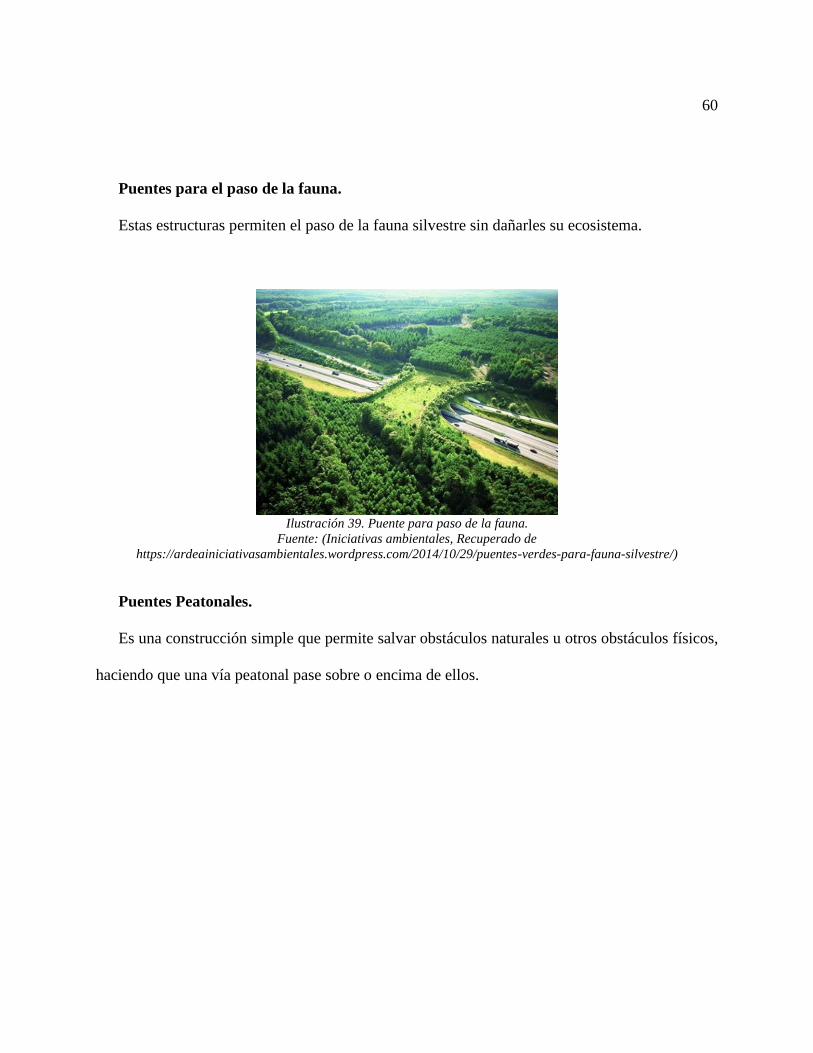
Puentes para el paso de la fauna.
Estas estructuras permiten el paso de la fauna silvestre sin dañarles su ecosistema.
Ilustración 39. Puente para paso de la fauna.
Fuente: (Iniciativas ambientales, Recuperado de
https://ardeainiciativasambientales.wordpress.com/2014/10/29/puentes-verdes-para-fauna-silvestre/)
Puentes Peatonales.
Es una construcción simple que permite salvar obstáculos naturales u otros obstáculos físicos,
haciendo que una vía peatonal pase sobre o encima de ellos.
61
Ilustración 40. Puente Peatonal.
Fuente: (planes y planos, Recuperado de https://planesyplanos.com/arquitectura/puentes-anti-peatonales-en-peru/)
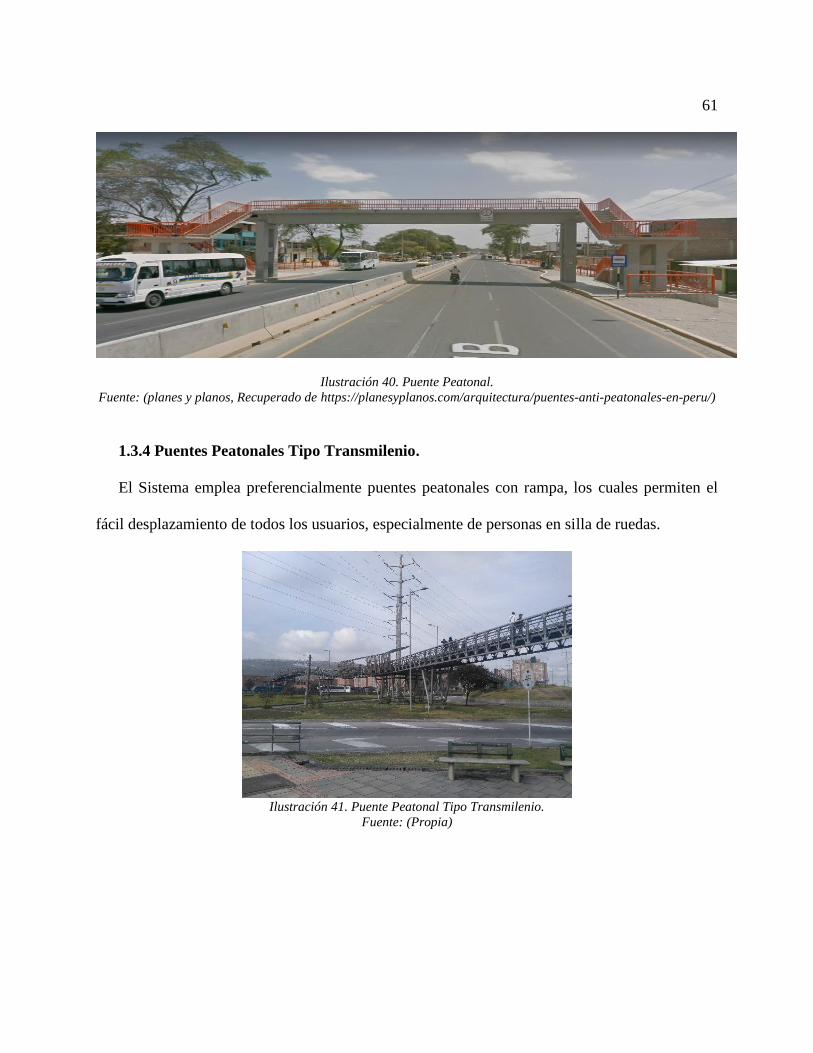
1.3.4 Puentes Peatonales Tipo Transmilenio.
El Sistema emplea preferencialmente puentes peatonales con rampa, los cuales permiten el
fácil desplazamiento de todos los usuarios, especialmente de personas en silla de ruedas.
Ilustración 41. Puente Peatonal Tipo Transmilenio.
Fuente: (Propia)
62
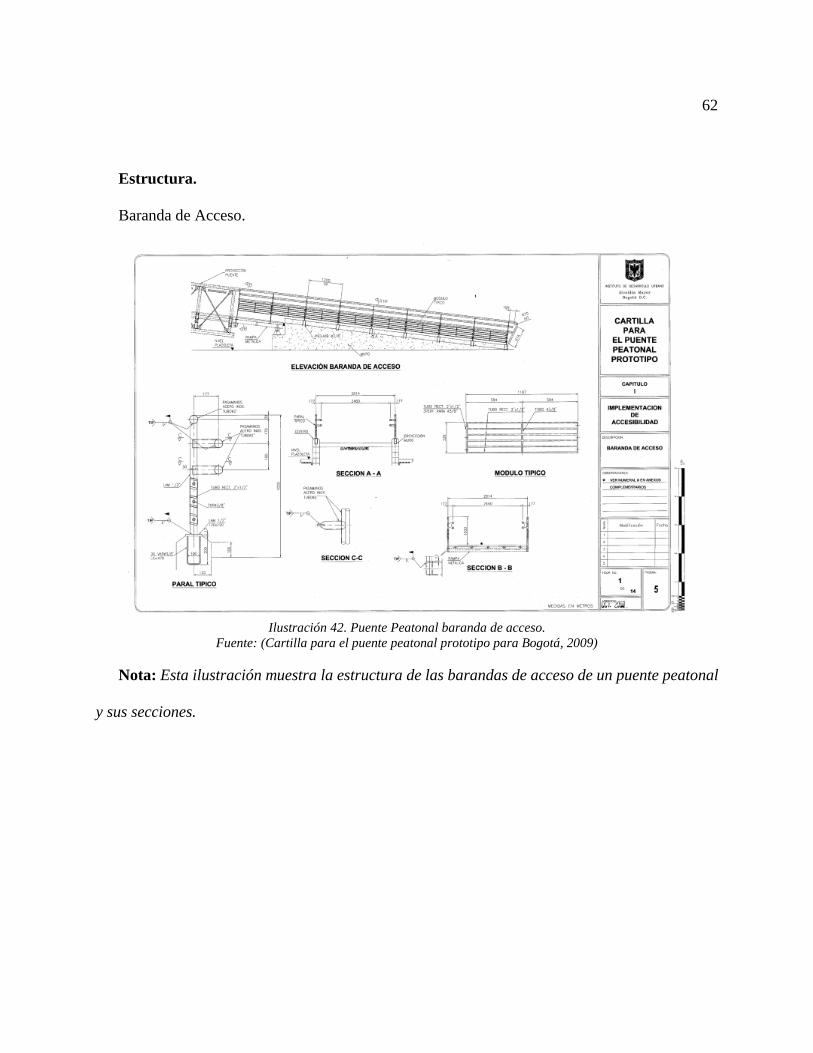
Estructura.
Baranda de Acceso.
Ilustración 42. Puente Peatonal baranda de acceso.
Fuente: (Cartilla para el puente peatonal prototipo para Bogotá, 2009)
Nota: Esta ilustración muestra la estructura de las barandas de acceso de un puente peatonal
y sus secciones.
63
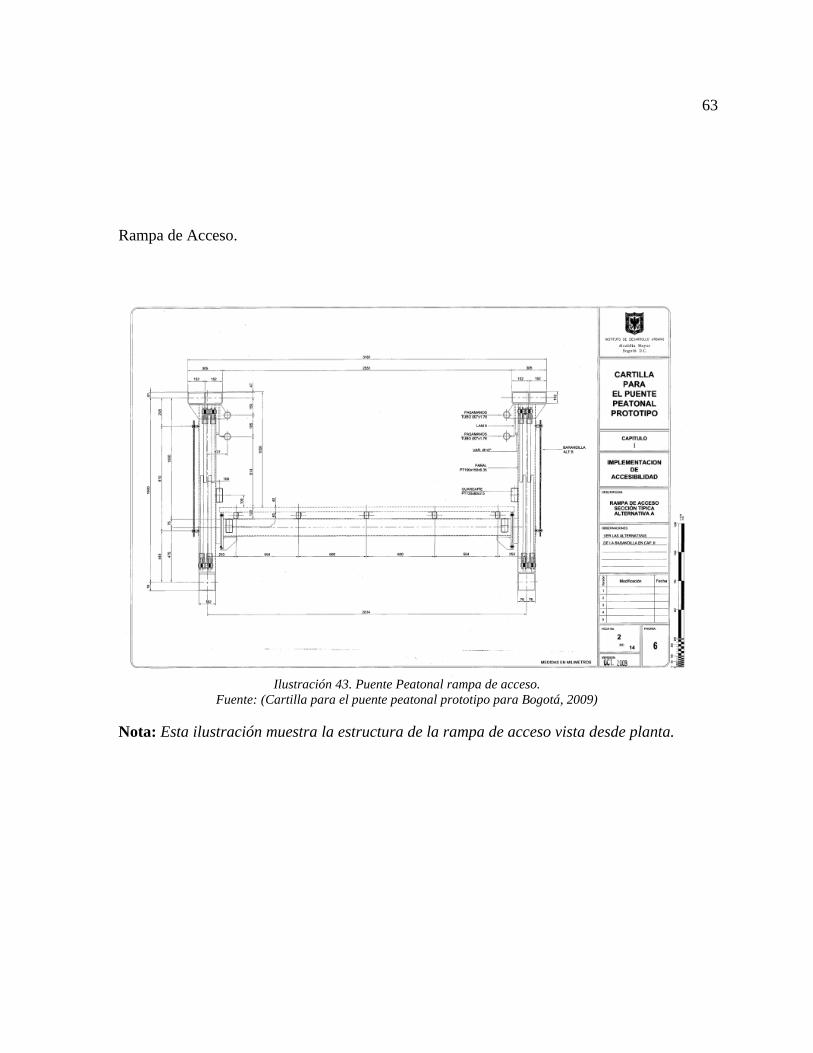
Rampa de Acceso.
Ilustración 43. Puente Peatonal rampa de acceso.
Fuente: (Cartilla para el puente peatonal prototipo para Bogotá, 2009)
Nota: Esta ilustración muestra la estructura de la rampa de acceso vista desde planta.
64
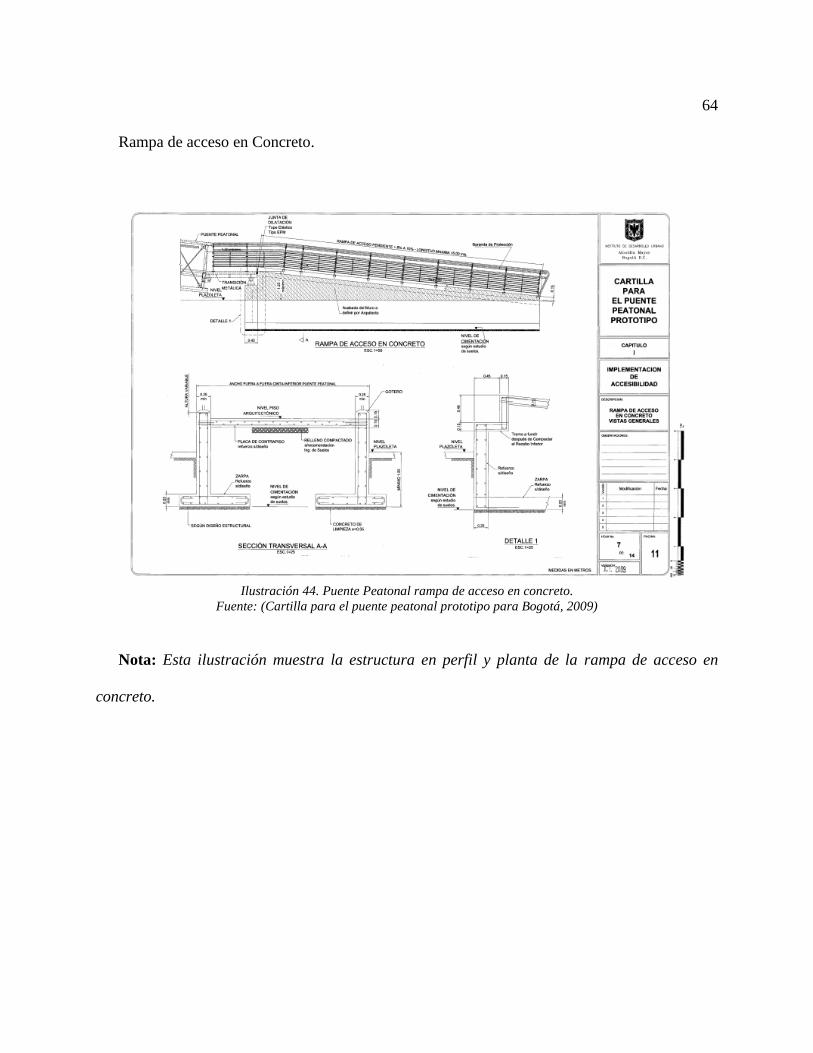
Rampa de acceso en Concreto.
Ilustración 44. Puente Peatonal rampa de acceso en concreto.
Fuente: (Cartilla para el puente peatonal prototipo para Bogotá, 2009)
Nota: Esta ilustración muestra la estructura en perfil y planta de la rampa de acceso en
concreto.
65
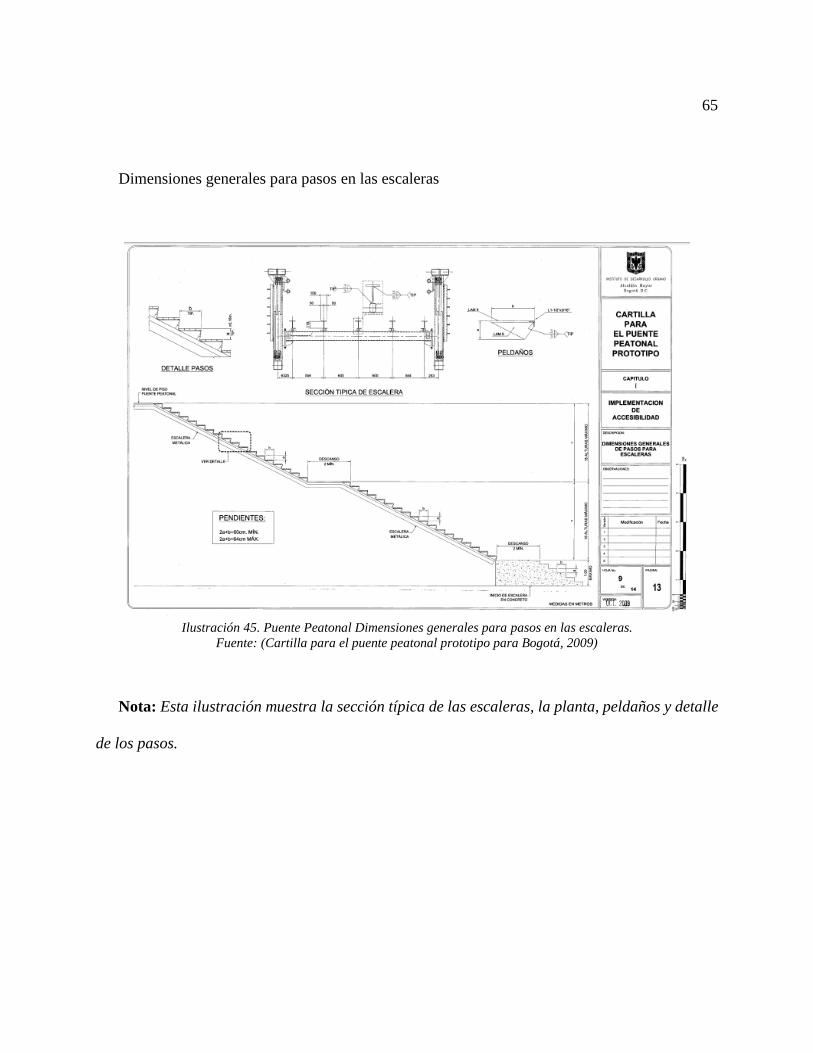
Dimensiones generales para pasos en las escaleras
Ilustración 45. Puente Peatonal Dimensiones generales para pasos en las escaleras.
Fuente: (Cartilla para el puente peatonal prototipo para Bogotá, 2009)
Nota: Esta ilustración muestra la sección típica de las escaleras, la planta, peldaños y detalle
de los pasos.
66
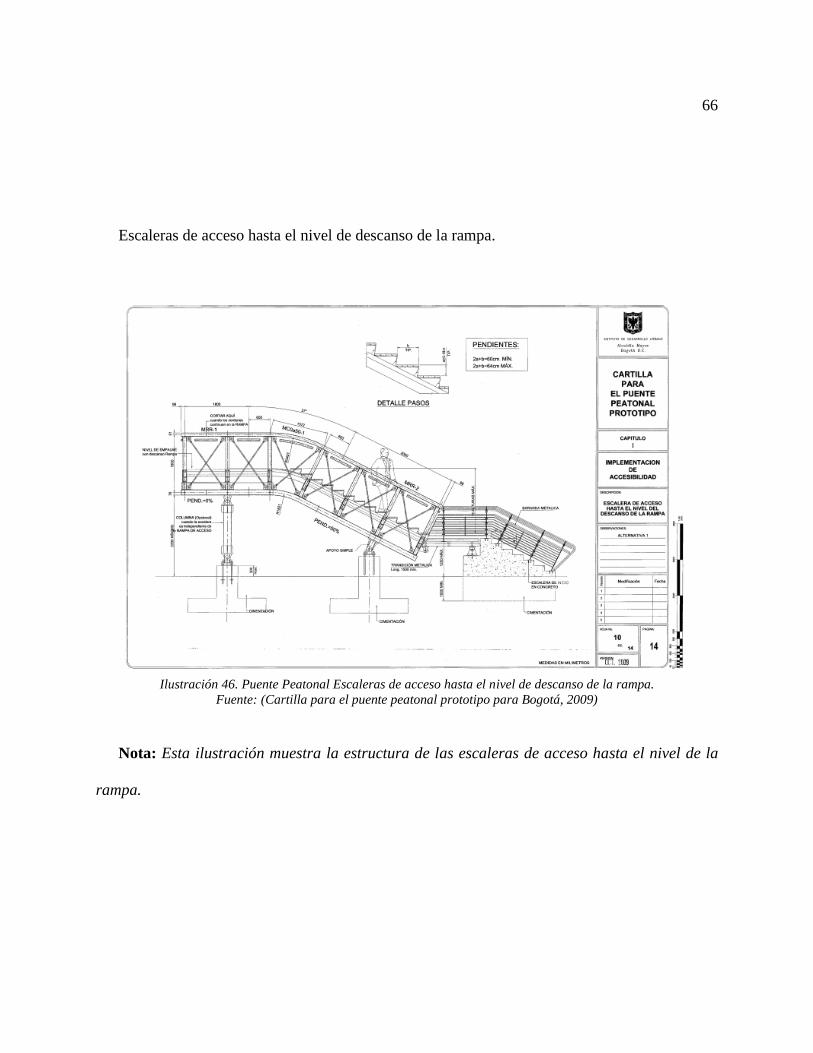
Escaleras de acceso hasta el nivel de descanso de la rampa.
Ilustración 46. Puente Peatonal Escaleras de acceso hasta el nivel de descanso de la rampa.
Fuente: (Cartilla para el puente peatonal prototipo para Bogotá, 2009)
Nota: Esta ilustración muestra la estructura de las escaleras de acceso hasta el nivel de la
rampa.
67
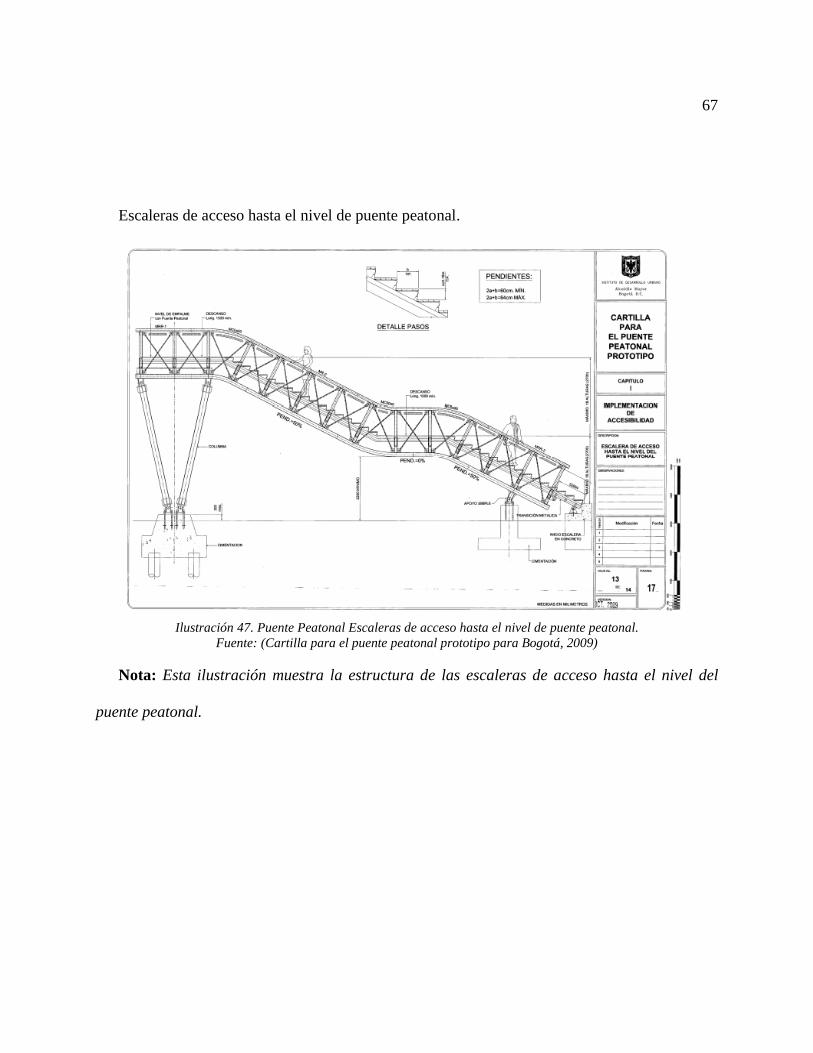
Escaleras de acceso hasta el nivel de puente peatonal.
Ilustración 47. Puente Peatonal Escaleras de acceso hasta el nivel de puente peatonal.
Fuente: (Cartilla para el puente peatonal prototipo para Bogotá, 2009)
Nota: Esta ilustración muestra la estructura de las escaleras de acceso hasta el nivel del
puente peatonal.
68
1.4 Inventario IDU.
Categoría de puentes.
Hace referencia a la subdivisión dentro del grupo de puentes para los que aplica un
levantamiento completo, con el fin de caracterizar puentes según su tipología, uso y accesibilidad,
para así definir una técnica o procedimiento para su levantamiento. La nomenclatura se debe a
solicitud realizada por el IDU para no utilizar el término “Tipo”, debido a posibles confusiones
generadas con la terminología que utiliza actualmente la Entidad.
• Categoría de puentes 1: Puentes sin acceso inferior o limitado.
• Categoría de puentes 2: Puentes cortos con acceso inferior.
• Categoría de puentes 3: Puentes largos con acceso inferior.
• Categoría de puentes 4: Puentes tipo TM.
• Categoría de puentes 5: Puentes simples en intersecciones complejas.
• Categoría de puentes 6: Puentes especiales.
69
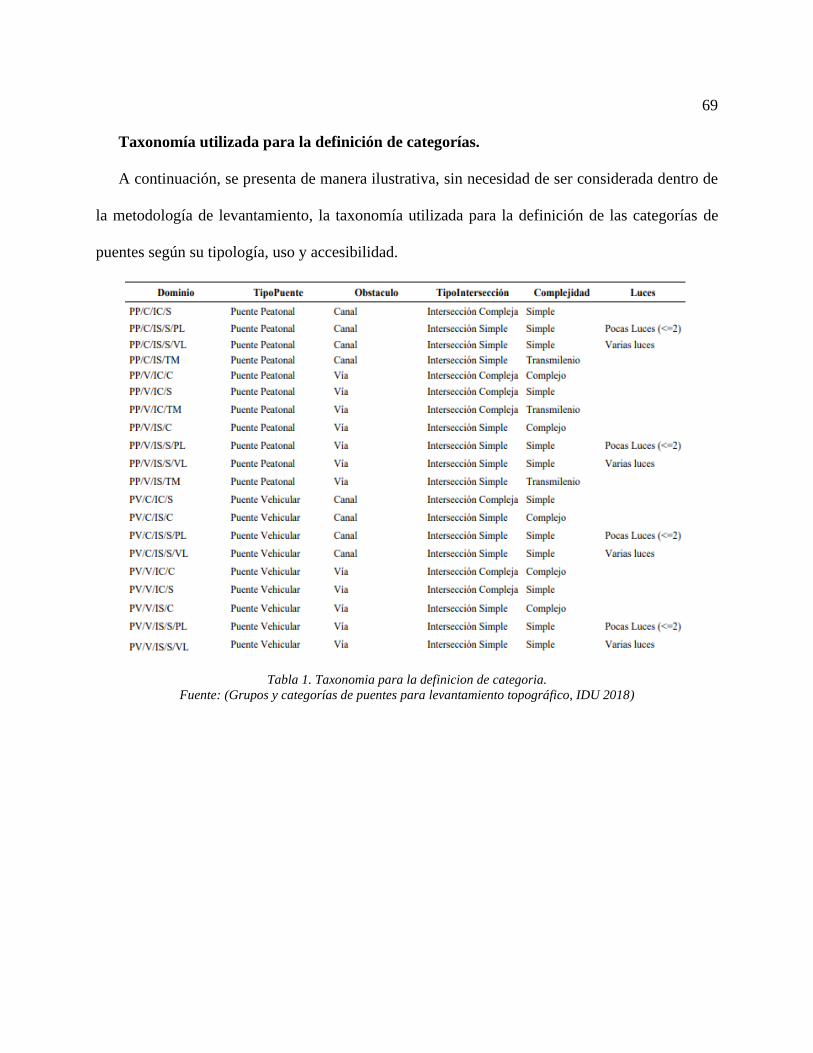
Taxonomía utilizada para la definición de categorías.
A continuación, se presenta de manera ilustrativa, sin necesidad de ser considerada dentro de
la metodología de levantamiento, la taxonomía utilizada para la definición de las categorías de
puentes según su tipología, uso y accesibilidad.
Tabla 1. Taxonomia para la definicion de categoria.
Fuente: (Grupos y categorías de puentes para levantamiento topográfico, IDU 2018)

70
Estadistica por tipo de Puente.
Ilustración 48. Estadística por tipo de puente.
Fuente: (IDU, 2018)
Nota: Esta ilustración muestra que el tipo de puente predominante en Bogotá es el vehicular
(amarillo), comparado con el peatonal (naranja).

71
Cantidad de puentes por localidad.
Ilustración 49. Estadística de puentes por localidad.
Fuente: (IDU, 2018)
Nota: Esta ilustración muestra las localidades de Bogotá y cantidad de puentes en cada una
de ellas, en donde Suba es la localidad con más puentes registrados (88) y La Candelaria la
localidad con menos puentes (8).
72
Puente peatonal tipo Transmilenio (Estación Portal Sur).
Ilustración 50. Puente peatonal estación portal sur.
Fuente: (IDU, 2018)
Nota: Esta ilustración muestra en color rojo el perímetro y la ubicación preliminar del puente
peatonal (Portal Sur).
Ilustración 51. Características puente peatonal estación portal sur.
Fuente: (IDU, 2018)

73
Puente peatonal tipo Transmilenio (Estación Apogeo)
Ilustración 52. Puente peatonal Apogeo.
Fuente: (IDU, 2018)
Nota: Esta ilustración muestra en color rojo el perímetro y la ubicación preliminar del puente
peatonal (Apogeo).
Ilustración 53. Características puente peatonal Apogeo.
Fuente: (IDU, 2018)
74
Puente peatonal tipo Transmilenio (Estación Perdomo).
Ilustración 54. Puente peatonal estación Perdomo.
Fuente: (IDU, 2018)
Nota: Esta ilustración muestra en color rojo el perímetro y la ubicación preliminar del puente
peatonal (Perdomo).
Ilustración 55. Características puente peatonal estación Perdomo.
Fuente: (IDU, 2018)
75
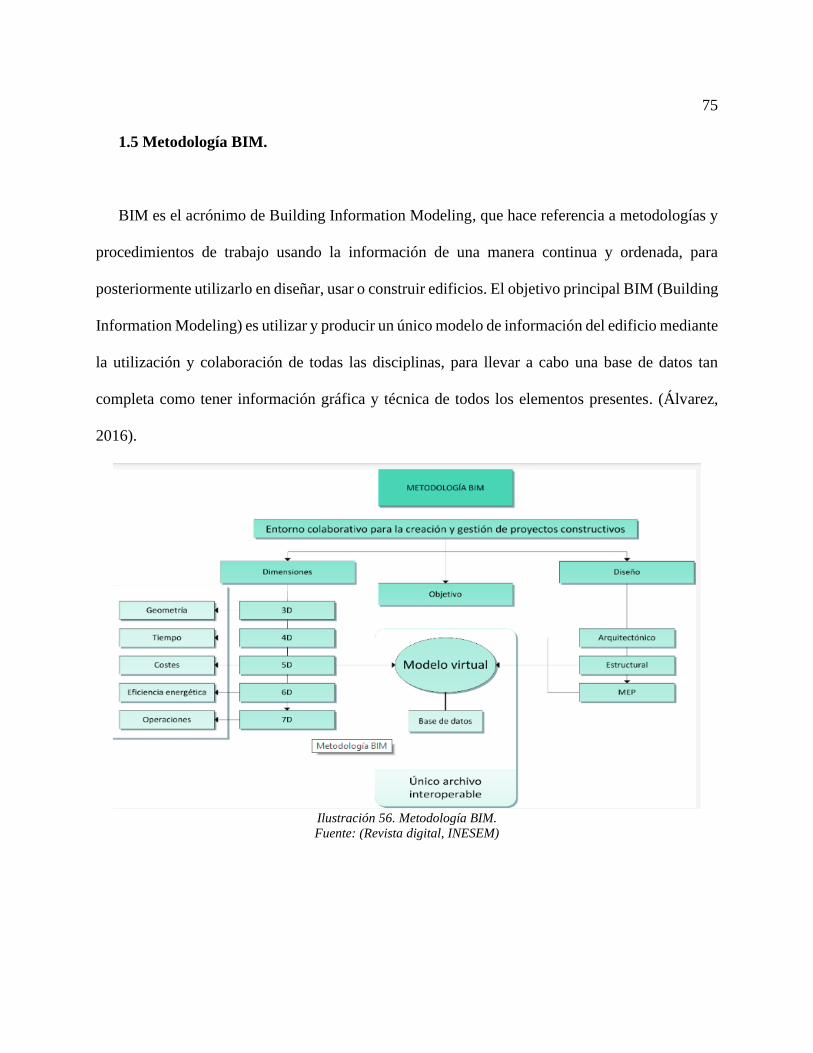
1.5 Metodología BIM.
BIM es el acrónimo de Building Information Modeling, que hace referencia a metodologías y
procedimientos de trabajo usando la información de una manera continua y ordenada, para
posteriormente utilizarlo en diseñar, usar o construir edificios. El objetivo principal BIM (Building
Information Modeling) es utilizar y producir un único modelo de información del edificio mediante
la utilización y colaboración de todas las disciplinas, para llevar a cabo una base de datos tan
completa como tener información gráfica y técnica de todos los elementos presentes. (Álvarez,
2016).
Ilustración 56. Metodología BIM.
Fuente: (Revista digital, INESEM)
76
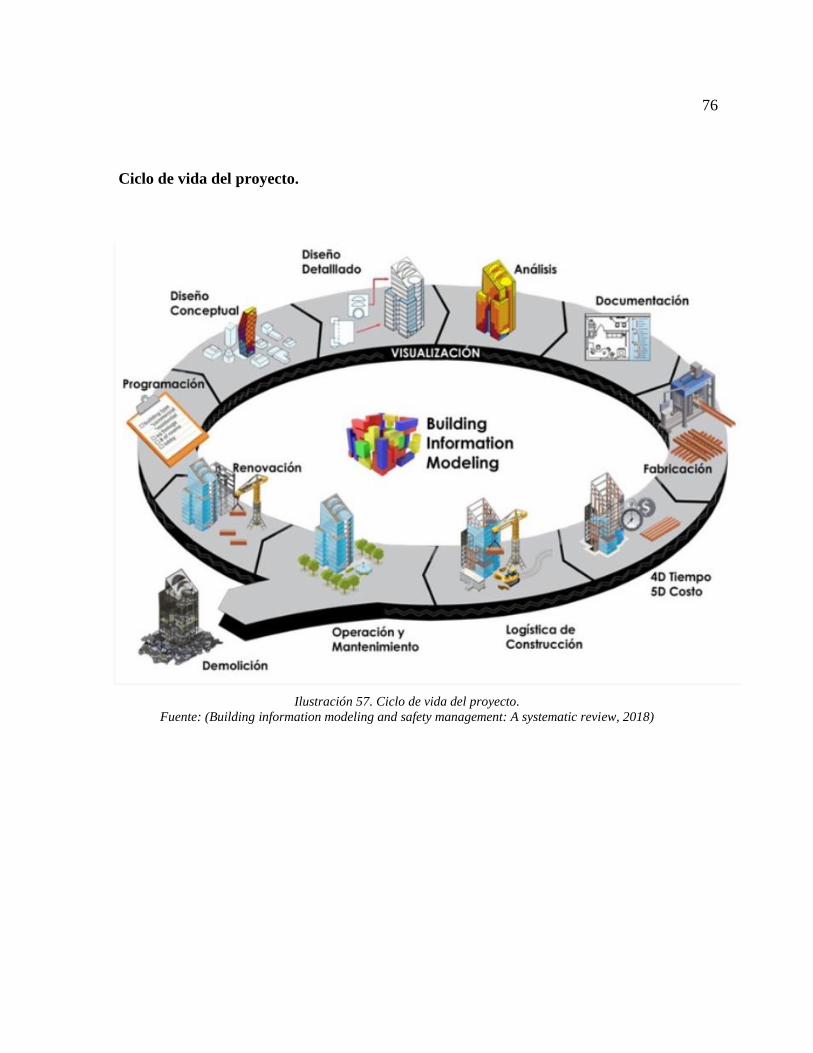
Ciclo de vida del proyecto.
Ilustración 57. Ciclo de vida del proyecto.
Fuente: (Building information modeling and safety management: A systematic review, 2018)
77
La utilización de esta metodología proporciona muchos beneficios a corto plazo, de los que
podemos destacar:
• Único modelo de datos en el que se comparte toda la información.
• Integración de múltiples disciplinas.
• Mejora continua en los procesos de trabajo.
• Detección y solución de interferencias entre disciplinas.
• Realización de presupuestos y mediciones con mayor precisión.
• Modelización y Visualización 3D.
1.5.2 LOD
NIVEL DE DESARROLLO (LOD)
LOD del inglés (Level Of Development), es un indicador que nos dice el nivel de desarrollo
que tiene un modelo BIM de cualquier infraestructura.
Esto sirve para identificar la categoría de los datos, geometría y parámetros de los que está
integrado un modelo BIM, esto se puede identificar visualmente en el modelo resultante 3D, no
obstante, no todos estos parámetros son visibles en el modelo digital, hay unos en los que es
necesario interactuar con él mismo para conocer más a fondo la estructura y elementos que lo
componen.
78
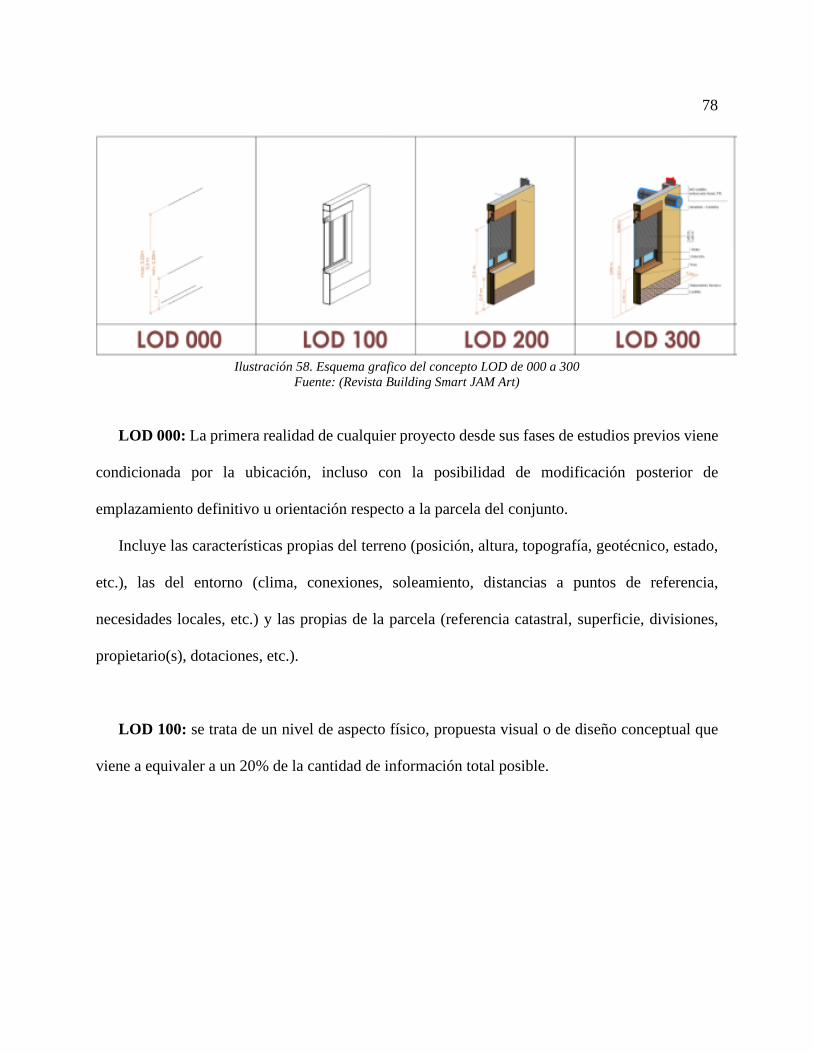
Ilustración 58. Esquema grafico del concepto LOD de 000 a 300
Fuente: (Revista Building Smart JAM Art)
LOD 000: La primera realidad de cualquier proyecto desde sus fases de estudios previos viene
condicionada por la ubicación, incluso con la posibilidad de modificación posterior de
emplazamiento definitivo u orientación respecto a la parcela del conjunto.
Incluye las características propias del terreno (posición, altura, topografía, geotécnico, estado,
etc.), las del entorno (clima, conexiones, soleamiento, distancias a puntos de referencia,
necesidades locales, etc.) y las propias de la parcela (referencia catastral, superficie, divisiones,
propietario(s), dotaciones, etc.).
LOD 100: se trata de un nivel de aspecto físico, propuesta visual o de diseño conceptual que
viene a equivaler a un 20% de la cantidad de información total posible.

79
LOD 200: se considera un nivel básico o esquematizado que incluye información dimensional
parametrizada y viene a equivaler a un 40% de la cantidad de información total posible.
LOD 300: en este nivel los elementos ya incluyen funciones determinadas, además de sus
dimensiones geométricas y corresponde a un 60% de la cantidad de información total posible.
Ilustración 59. Esquema grafico del concepto LOD de 400 a 600 y X00
Fuente: (Revista Building Smart JAM Art)
LOD 400: ya en este nivel los elementos cuentan con la información de un LOD 300 + los
parámetros de un modelo concreto, fabricante, coste, etc. y se contempla ya a nivel de proyecto de
contratación o construcción, equivaliendo a un 80% de la cantidad de información total posible.
LOD 500: a este nivel se le conoce como “AS BUILT”, es decir, hace referencia a un nivel en
el que el modelo es una la réplica de gran fidelidad a la edificación ya construida. Este nivel se
80
entiende que contiene el 100% de la información total posible, aunque realmente no tiene por qué
ser así, como a continuación aclararemos.
LOD 600: el elemento objeto no está definido geométricamente en detalle, pero sí lo están sus
condiciones de reciclado, como materiales propios, toxicidad, vida útil, básicas, distancia a puntos
de fabricación, reciclaje, peso y volumen, formas de traslado y desmontaje, etc. Está basada
principalmente en información no gráfica vinculada al elemento.
LOD X00: Se incluye en este nivel de desarrollo una actividad que ya se ha comenzado a
realizar, como el escaneado en 3D de edificios existentes que van a ser demolidos definitivamente,
o trasladados de su emplazamiento original, permaneciendo con el desarrollo correspondiente de
forma permanente o temporal en un mundo virtual con un grado de definición específico y
probable objeto de reproducción o desarrollo posterior.
Se entiende que a mayor LOD más características descritas de los elementos que componen el
modelo BIM, pero esto no tiene que ser estricto en el sentido en que cada LOD puede no necesitar
determinada información irrelevante para los objetivos del proyecto y aunque en general siempre
tendrá más desarrollo que su LOD antecesor, no todos los elementos han de tener ese nivel.
81
Es importante aclarar que el nivel de desarrollo de un modelo BIM (LOD) es el promedio de
LODs de los diferentes elementos que componen el modelo, es decir, puede que no todos los
elementos necesiten o simplemente no tengan el mismo nivel de desarrollo y, por tanto, debe
tenerse en cuenta la suma de elementos y sus respectivos niveles de desarrollo para promediar el
verdadero LOD del modelo en su conjunto. (BIM nD. 2017).
82
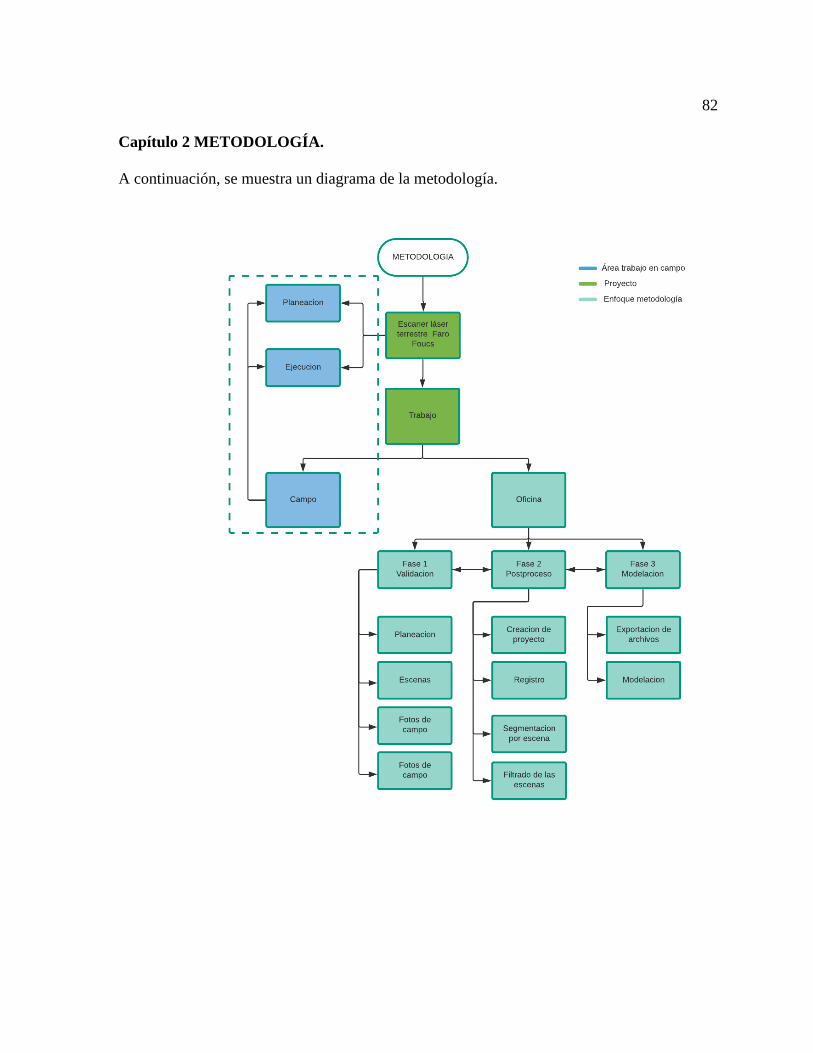
Capítulo 2 METODOLOGÍA.
A continuación, se muestra un diagrama de la metodología.
83
Fase 1
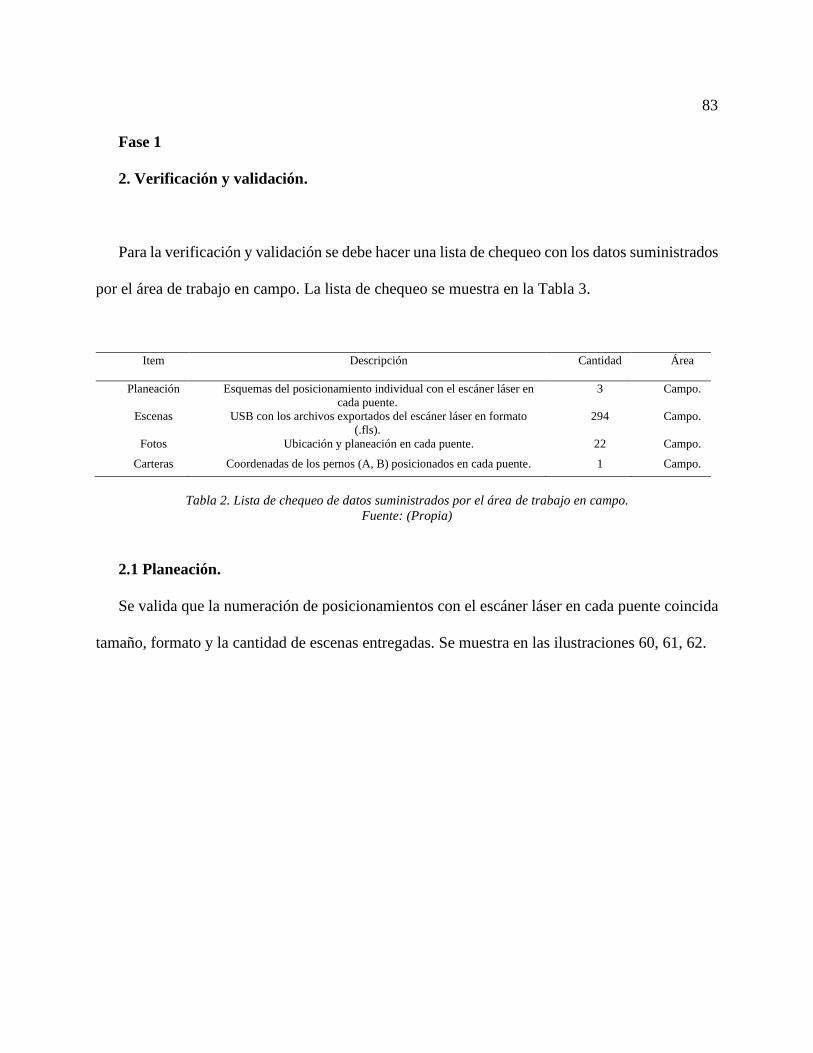
2. Verificación y validación.
Para la verificación y validación se debe hacer una lista de chequeo con los datos suministrados
por el área de trabajo en campo. La lista de chequeo se muestra en la Tabla 3.
Item Descripción Cantidad Área
Planeación Esquemas del posicionamiento individual con el escáner láser en
cada puente.
3 Campo.
Escenas USB con los archivos exportados del escáner láser en formato
(.fls).
294 Campo.
Fotos Ubicación y planeación en cada puente. 22 Campo.
Carteras Coordenadas de los pernos (A, B) posicionados en cada puente. 1 Campo.
Tabla 2. Lista de chequeo de datos suministrados por el área de trabajo en campo.
Fuente: (Propia)
2.1 Planeación.
Se valida que la numeración de posicionamientos con el escáner láser en cada puente coincida
tamaño, formato y la cantidad de escenas entregadas. Se muestra en las ilustraciones 60, 61, 62.

84
Ilustración 60. Planeación del puente Perdomo, 72 posicionamientos.
Fuente: (Mesa, 2019)
• Se valida que coincida los 72 posicionamientos con las escenas generadas por el escáner
laser.
• Proyecto es nombrado “Pte_tm_2_scan”.
• El tamaño de las 72 escenas es de 77.2 GB. (gigabytes) en formato. fls
85
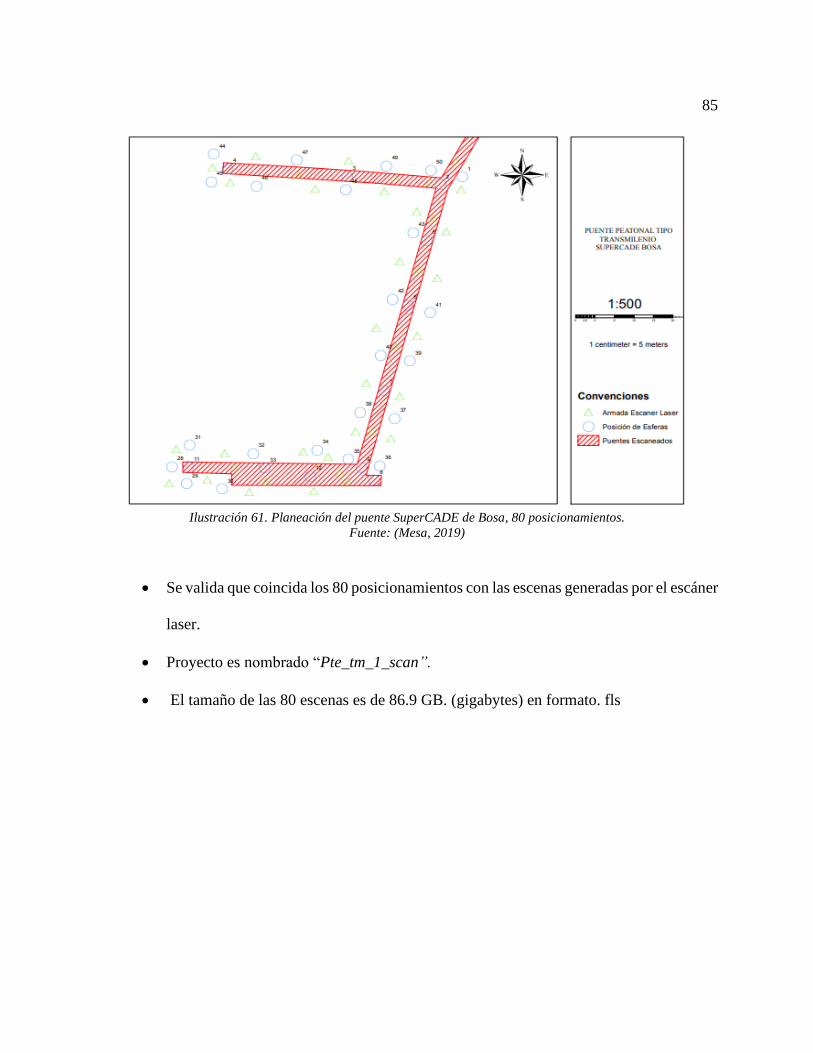
Ilustración 61. Planeación del puente SuperCADE de Bosa, 80 posicionamientos.
Fuente: (Mesa, 2019)
• Se valida que coincida los 80 posicionamientos con las escenas generadas por el escáner
laser.
• Proyecto es nombrado “Pte_tm_1_scan”.
• El tamaño de las 80 escenas es de 86.9 GB. (gigabytes) en formato. fls
86
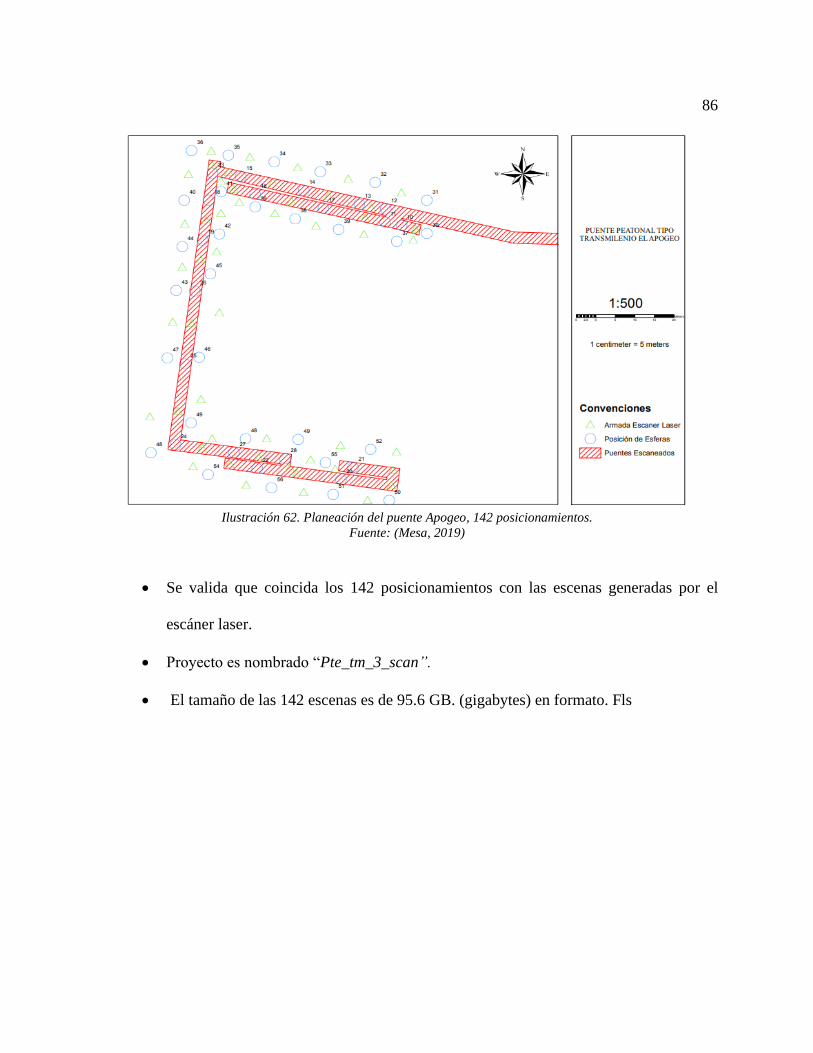
Ilustración 62. Planeación del puente Apogeo, 142 posicionamientos.
Fuente: (Mesa, 2019)
• Se valida que coincida los 142 posicionamientos con las escenas generadas por el
escáner laser.
• Proyecto es nombrado “Pte_tm_3_scan”.
• El tamaño de las 142 escenas es de 95.6 GB. (gigabytes) en formato. Fls
87
2.2 Escenas.
Se verifica el orden, titulación y formato de las escenas exportadas por el escáner láser. Se
muestra en la Tabla 4.
Puente Nombre Escenas Tamaño total Formato
SuperCADE. Pte_tm_1_scan 72 86.9GB .fls
Perdomo. Pte_tm_2_scan 80 77.2 GB .fls
Apogeo. Pte_tm_3_scan 142 95.6 GB .fls
Tabla 3. Titulación de escenas por puente.
Fuente: Propia.
Para cada una de las escenas se debe validar que no contengan ningún tipo de error, para esto
se ejecuta de manera individual en el software SCENE (Explicación 2.2.1 Vinculación de escenas).
2.3 Fotos en campo.
Las fotos suministradas por el área de trabajo en campo, son apoyo para el reconocimiento de
la geometría de cada puente y planeación de los escaneos.
88
Se analiza la geometría del puente para tener una base de comparación con el resultado final
de la modelación. Se muestra en la ilustración 63.
Ilustración 63. Puente Peatonal Perdomo.
Fuente: (Propia)
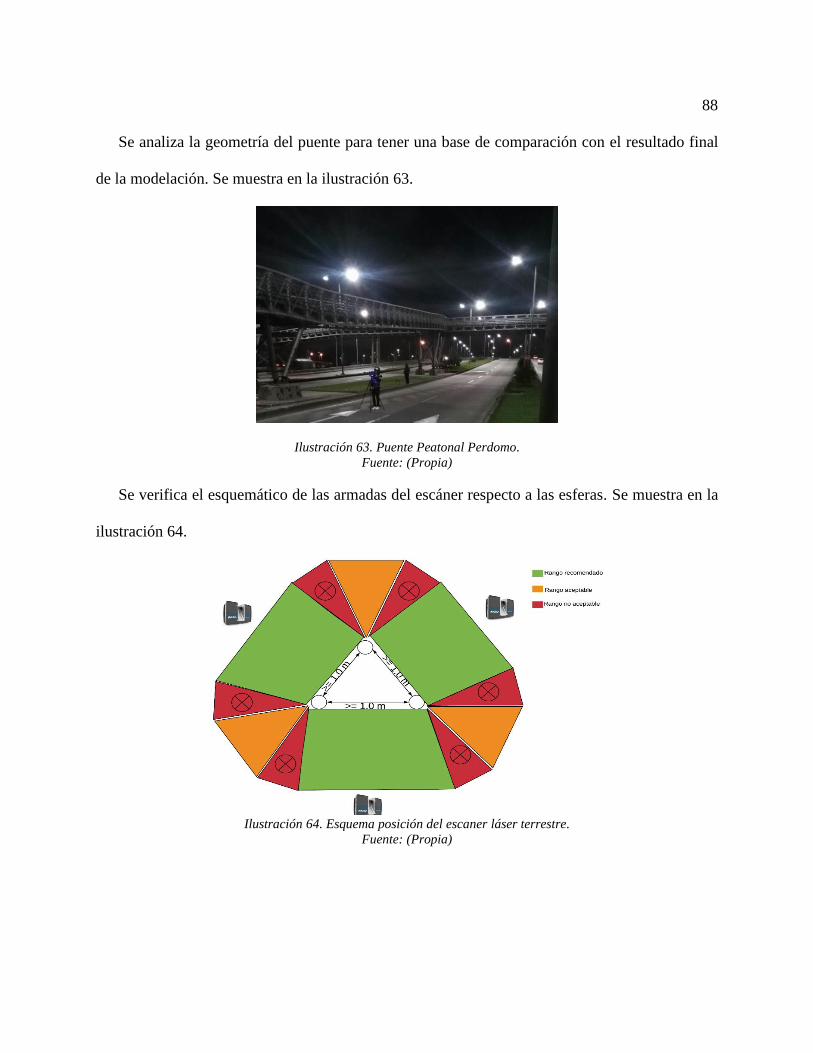
Se verifica el esquemático de las armadas del escáner respecto a las esferas. Se muestra en la
ilustración 64.
Ilustración 64. Esquema posición del escaner láser terrestre.
Fuente: (Propia)

89
Esferas de referencia.
• No deben quedar colineales.
• Deben tener aproximadamente un metro de distancia entre ellas con una buena
triangulación.
• Deben estar a 10m máximo 12m de distancia al equipo para que sean reconocidas,
según la resolución y calidad escogidas.
• Al momento de ubicarlas se debe tener presente la siguiente armada para que cumpla
los mismos requisitos.
• Deben estar en lo posible un poco más altas del suelo para que no interfiera ninguna
roca o pasto entre ellas y el escáner, ya que dañaría el reconocimiento de la geometría
de la esfera.
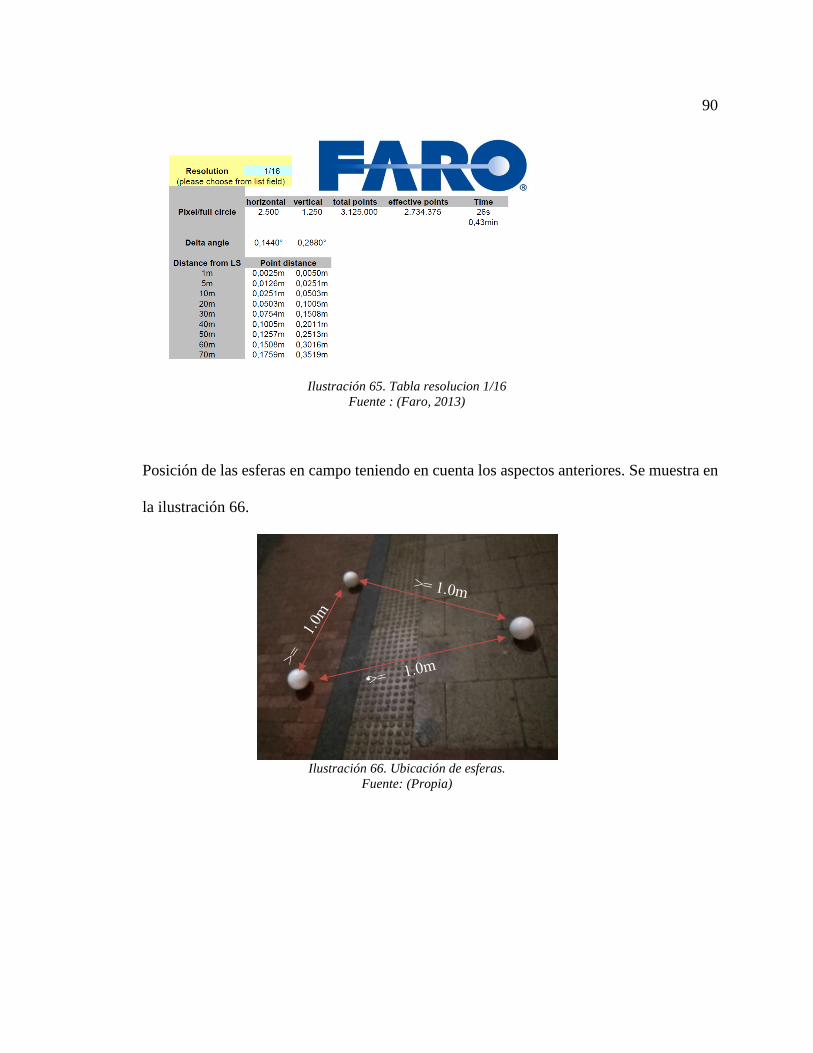
Faro presenta una comparación de distancias que se usa en la configuración de resolución 1/16
para su posicionamiento. Se muestra en la ilustración 65.
90
Ilustración 65. Tabla resolucion 1/16
Fuente : (Faro, 2013)
Posición de las esferas en campo teniendo en cuenta los aspectos anteriores. Se muestra en
la ilustración 66.
Ilustración 66. Ubicación de esferas.
Fuente: (Propia)
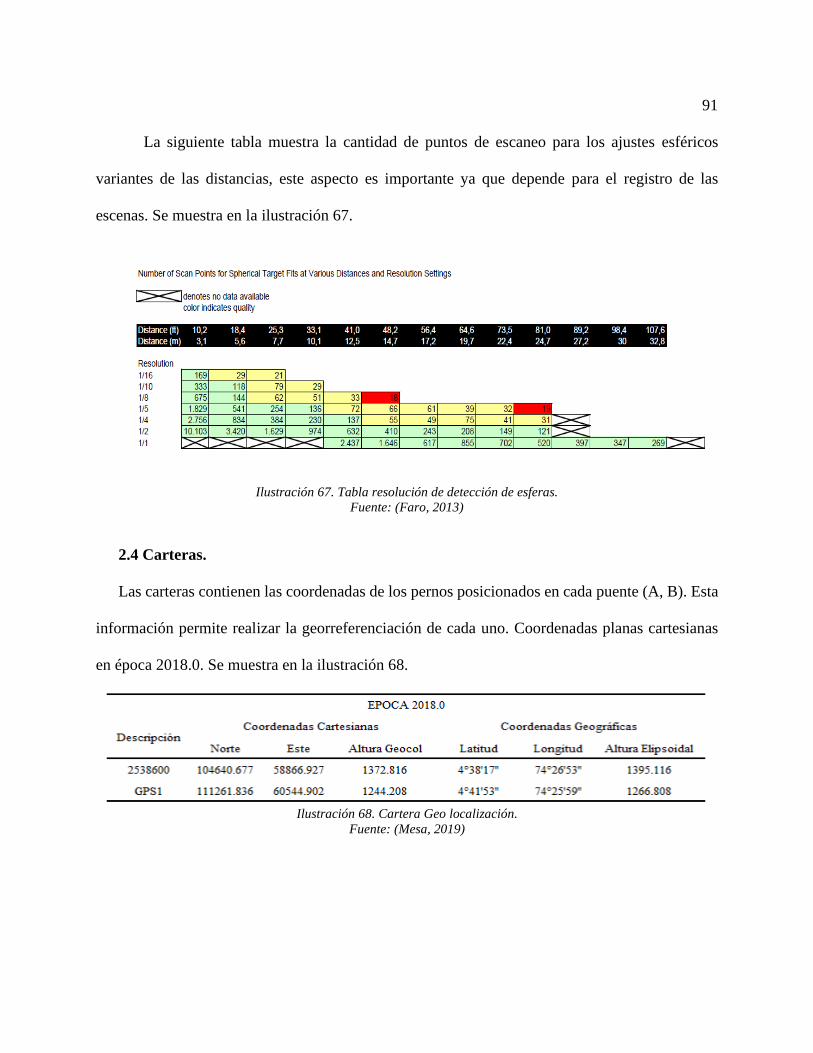
91
La siguiente tabla muestra la cantidad de puntos de escaneo para los ajustes esféricos
variantes de las distancias, este aspecto es importante ya que depende para el registro de las
escenas. Se muestra en la ilustración 67.
Ilustración 67. Tabla resolución de detección de esferas.
Fuente: (Faro, 2013)
2.4 Carteras.
Las carteras contienen las coordenadas de los pernos posicionados en cada puente (A, B). Esta
información permite realizar la georreferenciación de cada uno. Coordenadas planas cartesianas
en época 2018.0. Se muestra en la ilustración 68.
Ilustración 68. Cartera Geo localización.
Fuente: (Mesa, 2019)
92
Fase 2
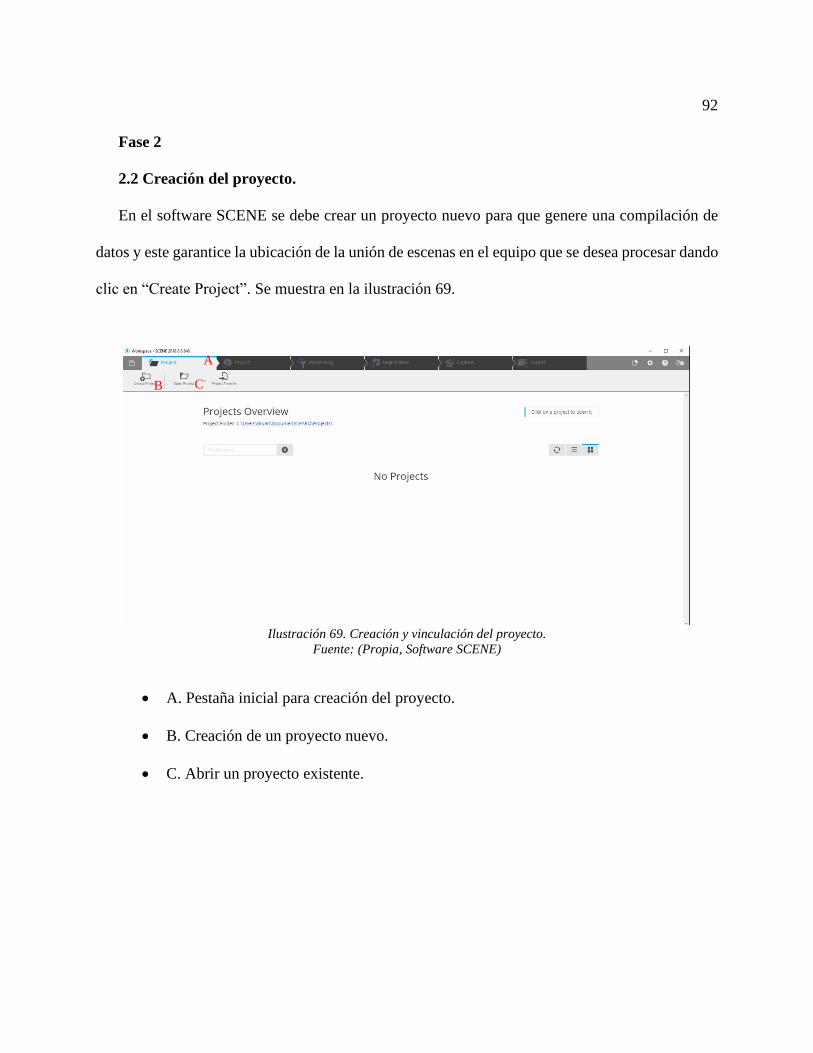
2.2 Creación del proyecto.
En el software SCENE se debe crear un proyecto nuevo para que genere una compilación de
datos y este garantice la ubicación de la unión de escenas en el equipo que se desea procesar dando
clic en “Create Project”. Se muestra en la ilustración 69.
Ilustración 69. Creación y vinculación del proyecto.
Fuente: (Propia, Software SCENE)
• A. Pestaña inicial para creación del proyecto.
• B. Creación de un proyecto nuevo.
• C. Abrir un proyecto existente.
B C
A
93
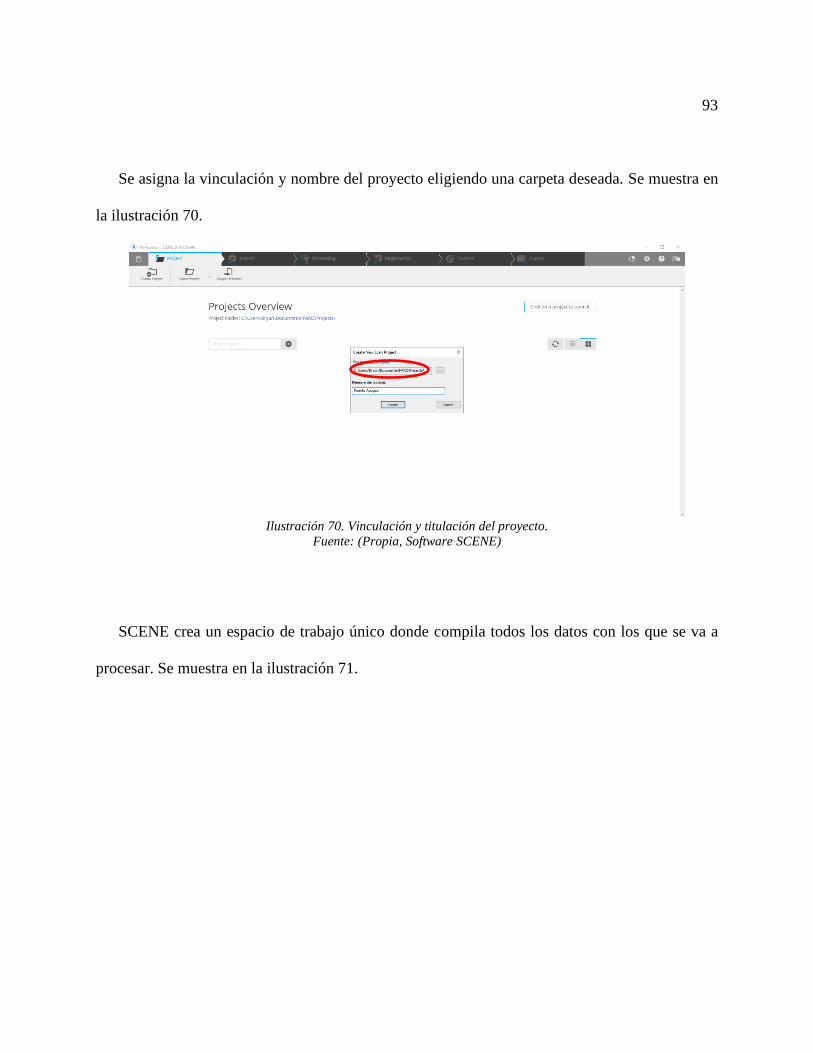
Se asigna la vinculación y nombre del proyecto eligiendo una carpeta deseada. Se muestra en
la ilustración 70.
Ilustración 70. Vinculación y titulación del proyecto.
Fuente: (Propia, Software SCENE)
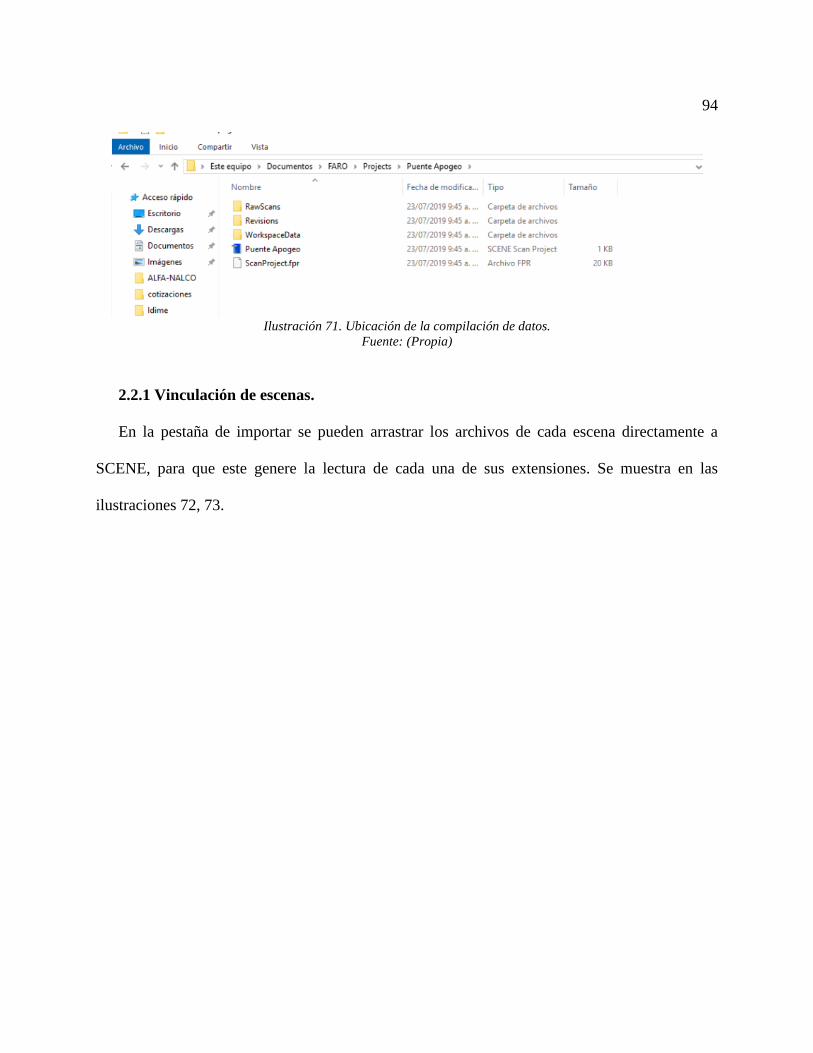
SCENE crea un espacio de trabajo único donde compila todos los datos con los que se va a
procesar. Se muestra en la ilustración 71.
94
Ilustración 71. Ubicación de la compilación de datos.
Fuente: (Propia)
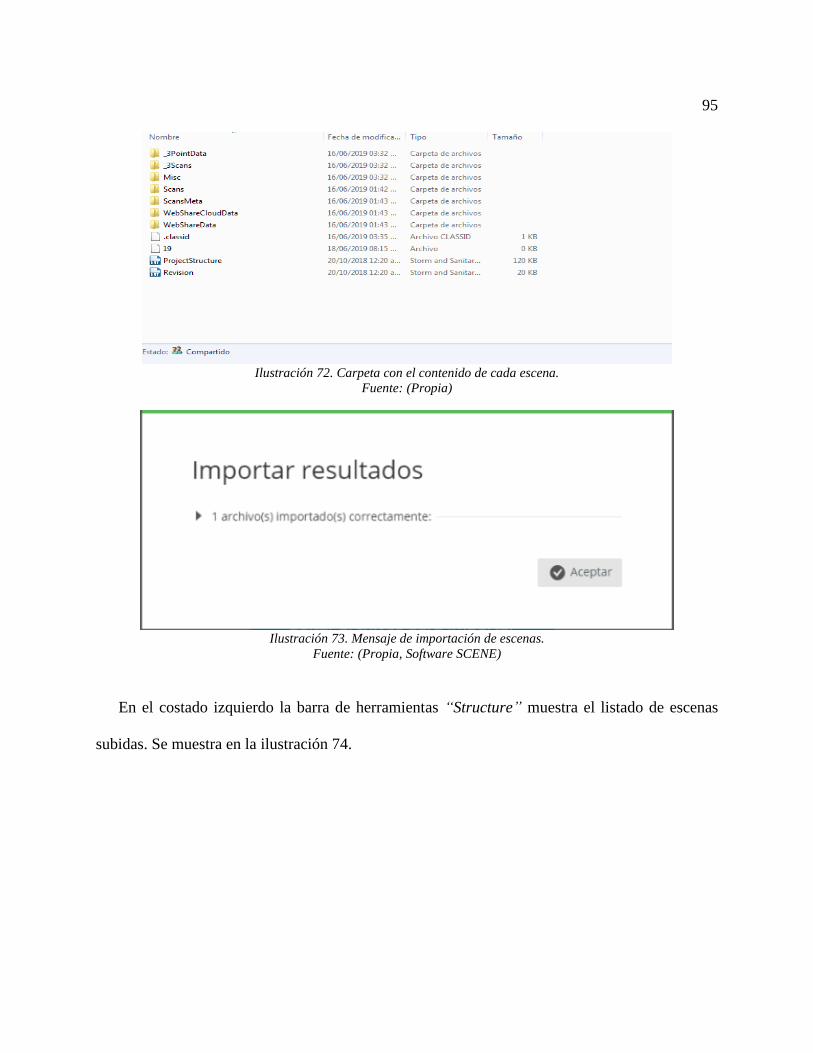
2.2.1 Vinculación de escenas.
En la pestaña de importar se pueden arrastrar los archivos de cada escena directamente a
SCENE, para que este genere la lectura de cada una de sus extensiones. Se muestra en las
ilustraciones 72, 73.
95
Ilustración 72. Carpeta con el contenido de cada escena.
Fuente: (Propia)
Ilustración 73. Mensaje de importación de escenas.
Fuente: (Propia, Software SCENE)
En el costado izquierdo la barra de herramientas “Structure” muestra el listado de escenas
subidas. Se muestra en la ilustración 74.

96
Ilustración 74. Arrastre de archivos directamente a SCENE.
Fuente: (Propia, Software SCENE)
• A. Pestaña para importar archivos.
• B. Importar escenas individuales.
• C. Importar varias escenas.
• D. Espacio de trabajo para las escenas.
2.3 Registro.
Se conoce como registro a la acción de unir las escenas tomadas en el levantamiento
topográfico con escáner laser por medio de puntos de referencia conocidas como estaciones o bien
llamadas esferas y/o elementos relacionados.
B
D
C
A
97
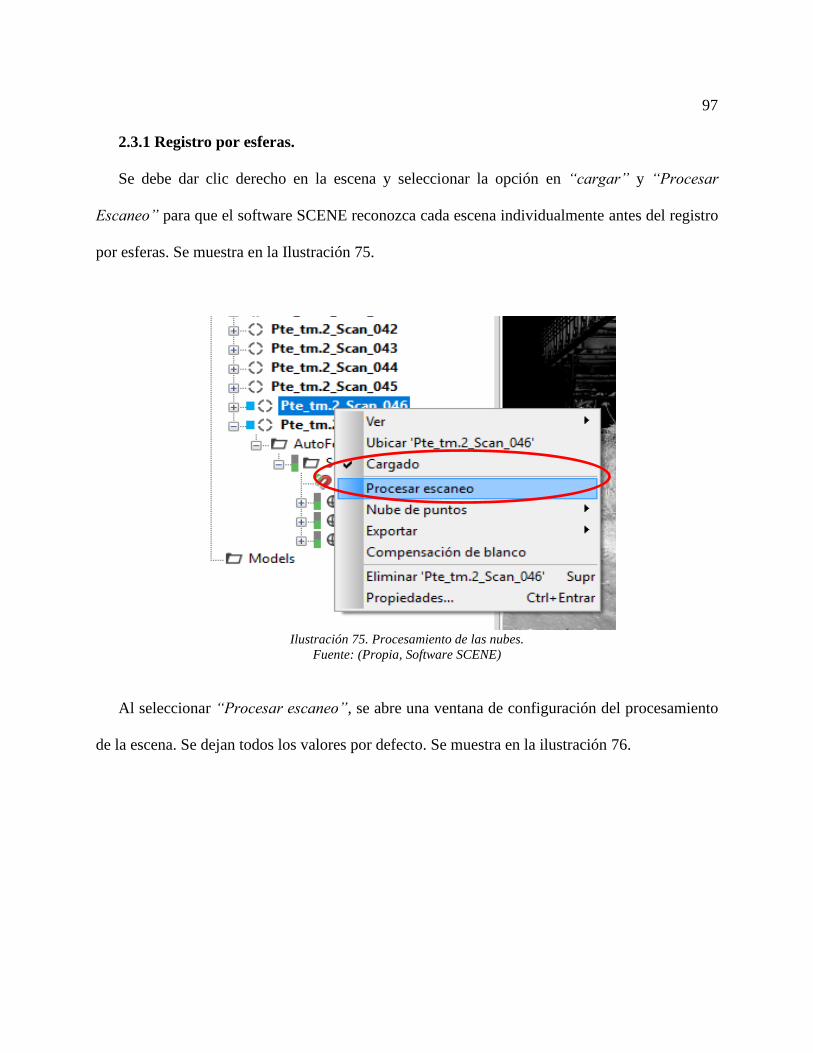
2.3.1 Registro por esferas.
Se debe dar clic derecho en la escena y seleccionar la opción en “cargar” y “Procesar
Escaneo” para que el software SCENE reconozca cada escena individualmente antes del registro
por esferas. Se muestra en la Ilustración 75.
Ilustración 75. Procesamiento de las nubes.
Fuente: (Propia, Software SCENE)
Al seleccionar “Procesar escaneo”, se abre una ventana de configuración del procesamiento
de la escena. Se dejan todos los valores por defecto. Se muestra en la ilustración 76.
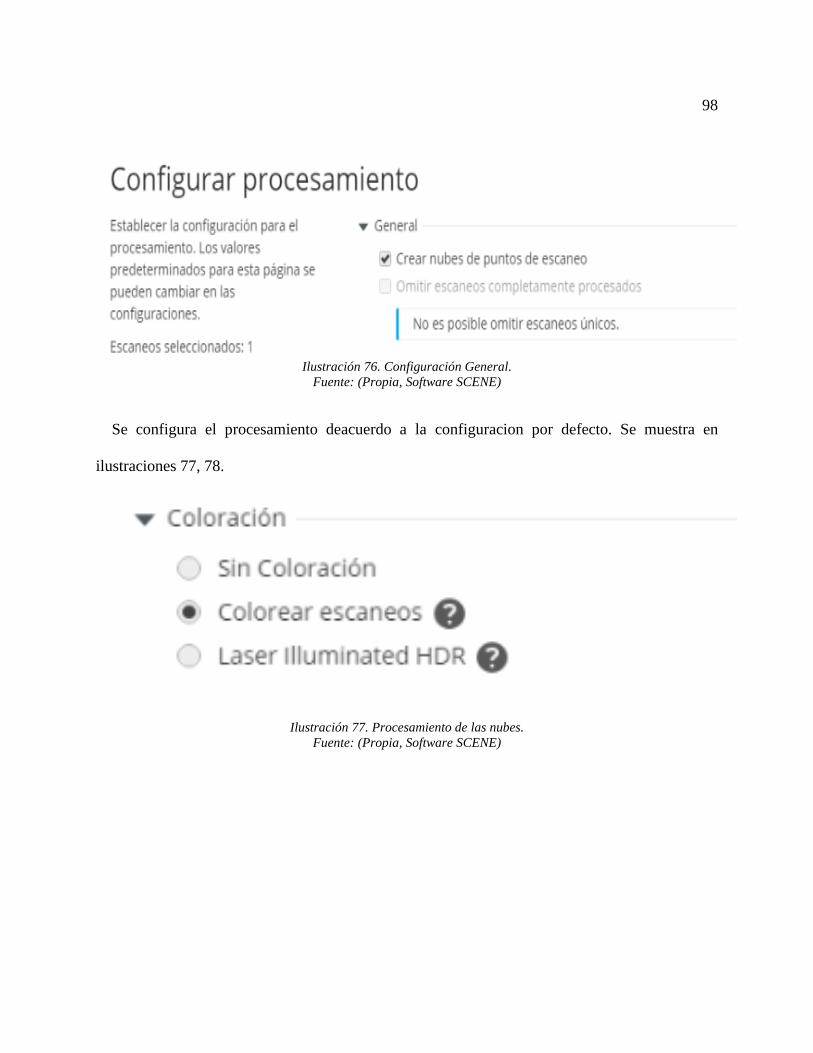
98
Ilustración 76. Configuración General.
Fuente: (Propia, Software SCENE)
Se configura el procesamiento deacuerdo a la configuracion por defecto. Se muestra en
ilustraciones 77, 78.
Ilustración 77. Procesamiento de las nubes.
Fuente: (Propia, Software SCENE)
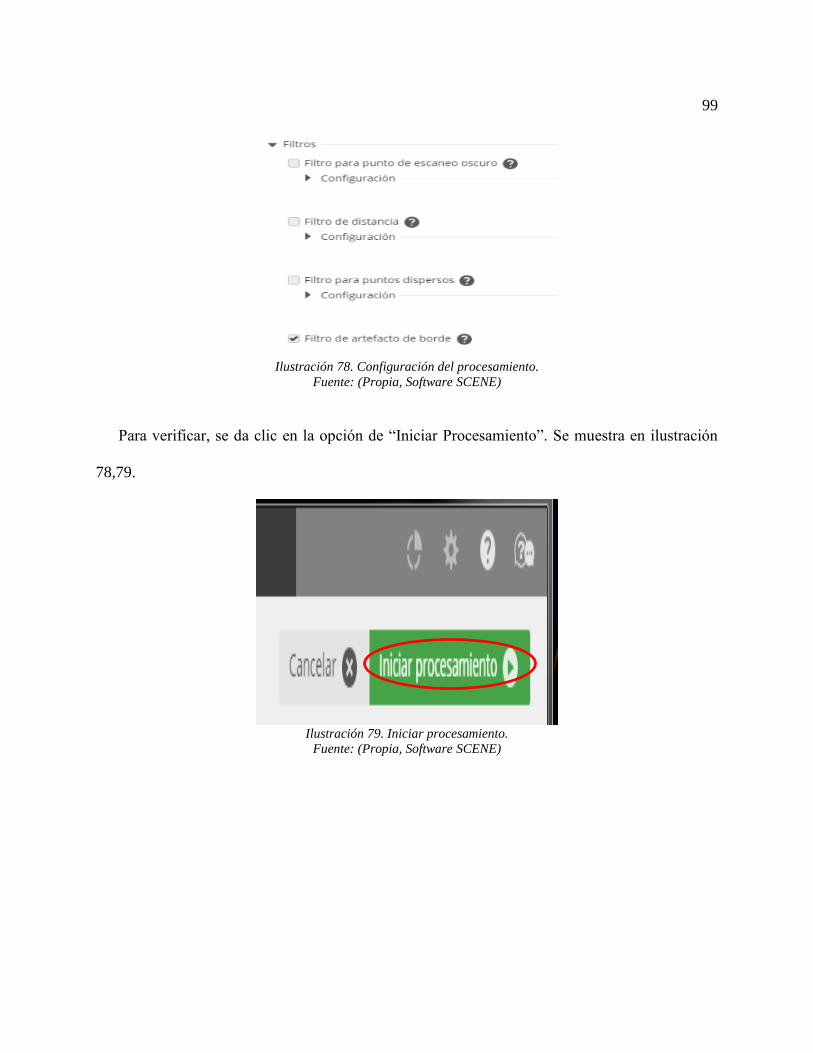
99
Ilustración 78. Configuración del procesamiento.
Fuente: (Propia, Software SCENE)
Para verificar, se da clic en la opción de “Iniciar Procesamiento”. Se muestra en ilustración
78,79.
Ilustración 79. Iniciar procesamiento.
Fuente: (Propia, Software SCENE)
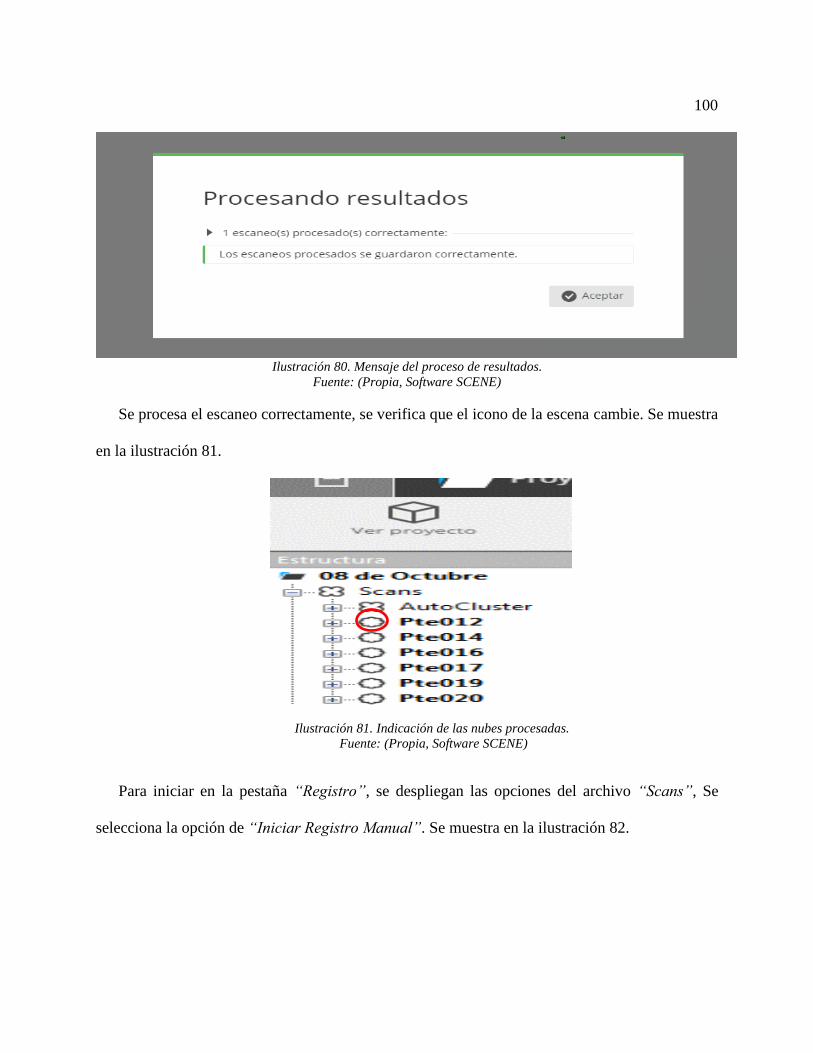
100
Ilustración 80. Mensaje del proceso de resultados.
Fuente: (Propia, Software SCENE)
Se procesa el escaneo correctamente, se verifica que el icono de la escena cambie. Se muestra
en la ilustración 81.
Ilustración 81. Indicación de las nubes procesadas.
Fuente: (Propia, Software SCENE)
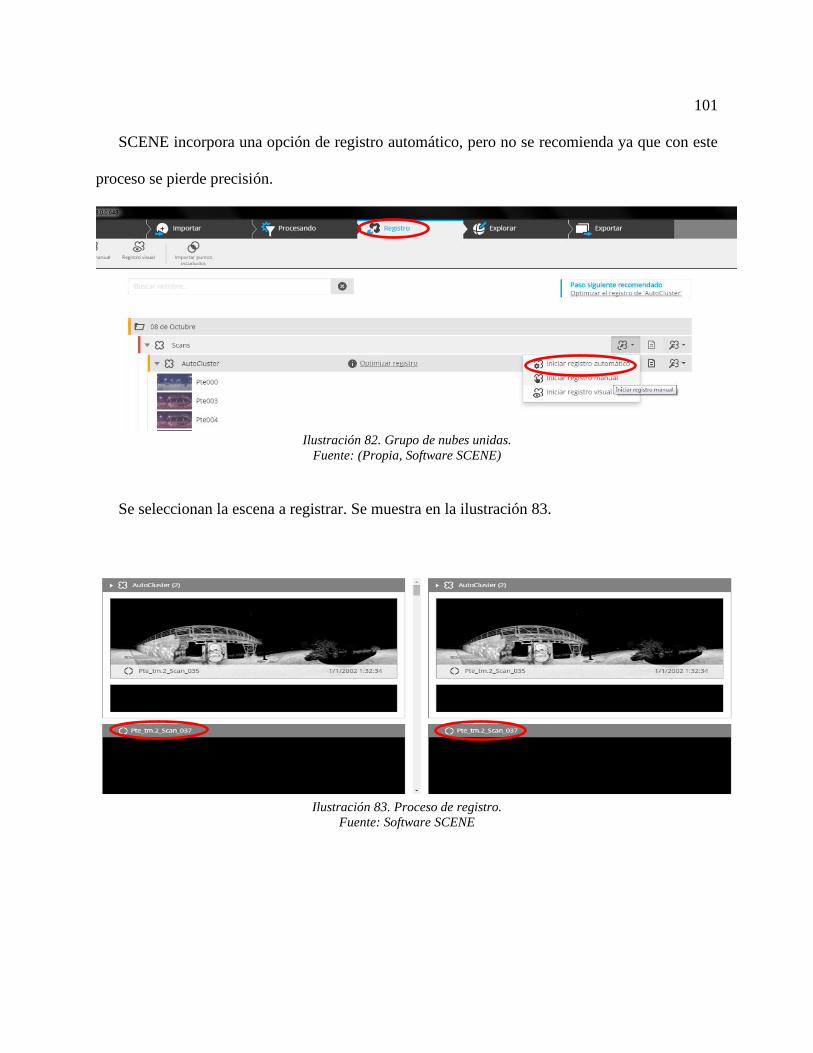
Para iniciar en la pestaña “Registro”, se despliegan las opciones del archivo “Scans”, Se
selecciona la opción de “Iniciar Registro Manual”. Se muestra en la ilustración 82.
101
SCENE incorpora una opción de registro automático, pero no se recomienda ya que con este
proceso se pierde precisión.
Ilustración 82. Grupo de nubes unidas.
Fuente: (Propia, Software SCENE)
Se seleccionan la escena a registrar. Se muestra en la ilustración 83.
Ilustración 83. Proceso de registro.
Fuente: Software SCENE
102
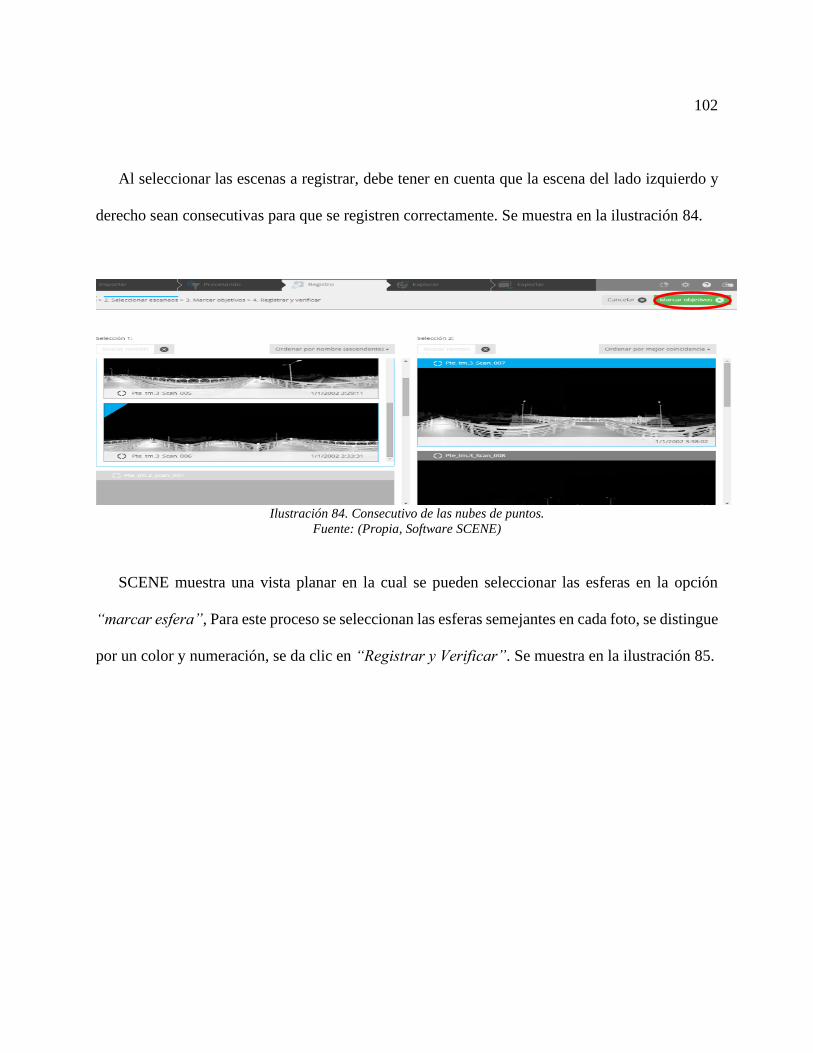
Al seleccionar las escenas a registrar, debe tener en cuenta que la escena del lado izquierdo y
derecho sean consecutivas para que se registren correctamente. Se muestra en la ilustración 84.
Ilustración 84. Consecutivo de las nubes de puntos.
Fuente: (Propia, Software SCENE)
SCENE muestra una vista planar en la cual se pueden seleccionar las esferas en la opción
“marcar esfera”, Para este proceso se seleccionan las esferas semejantes en cada foto, se distingue
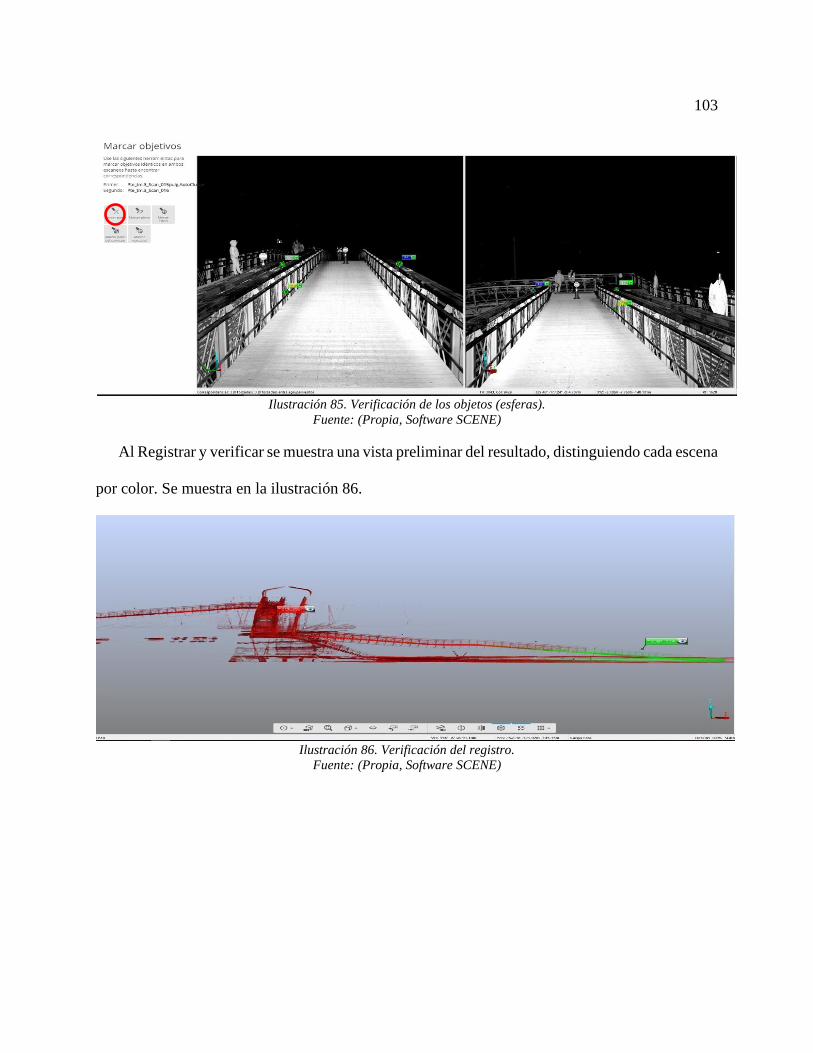
por un color y numeración, se da clic en “Registrar y Verificar”. Se muestra en la ilustración 85.
103
Ilustración 85. Verificación de los objetos (esferas).
Fuente: (Propia, Software SCENE)
Al Registrar y verificar se muestra una vista preliminar del resultado, distinguiendo cada escena
por color. Se muestra en la ilustración 86.
Ilustración 86. Verificación del registro.
Fuente: (Propia, Software SCENE)

104
Se despliegan unos parámetros que muestran “Color Único” y la opción de “¿Está satisfecho
con el resultado?”. En caso afirmativo, marcar “Si”, Seleccionar “Próximo par” y en caso
contrario devolverse y verificar. Se muestra en la ilustración 87.
Ilustración 87. Verificación del registro final.
Fuente: (Propia, Software SCENE)
Al realizar este proceso con todas las escenas se muestra un aviso de registro optimizado.
Se debe dar opción “volver al panel de registro”, ya que la optimización puede alterar cambios
en el registro de escenas. Se muestra en la ilustración 88.
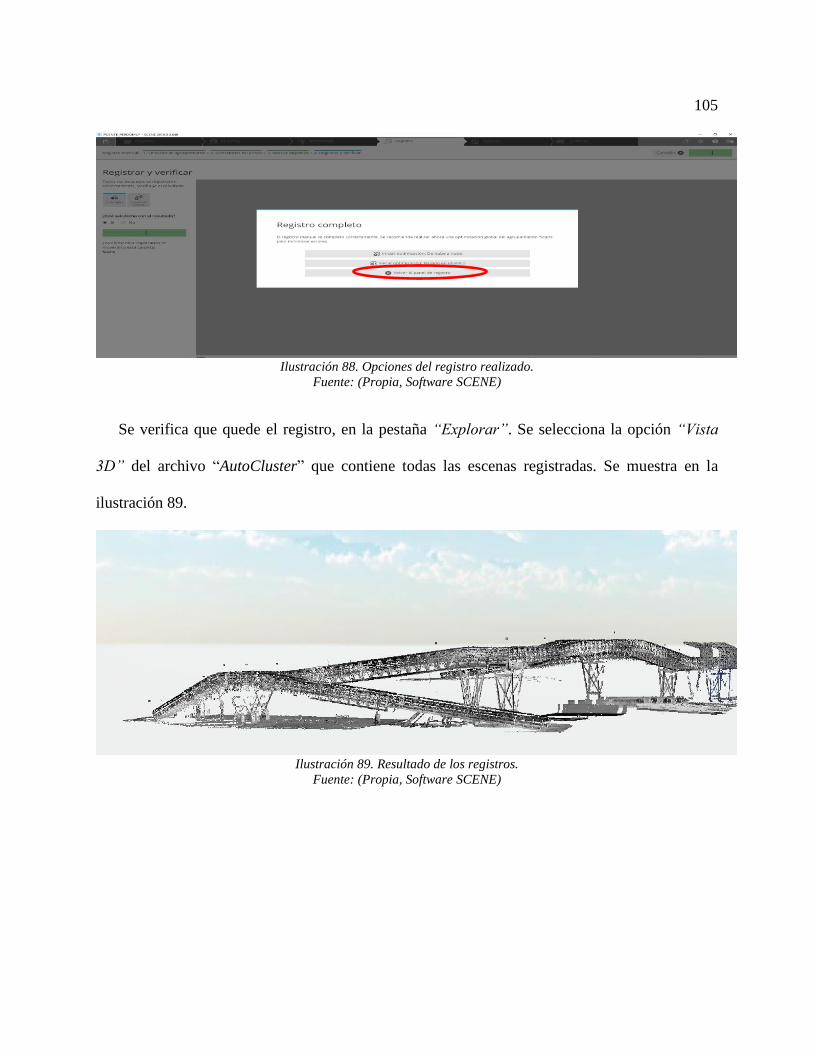
105
Ilustración 88. Opciones del registro realizado.
Fuente: (Propia, Software SCENE)
Se verifica que quede el registro, en la pestaña “Explorar”. Se selecciona la opción “Vista
3D” del archivo “AutoCluster” que contiene todas las escenas registradas. Se muestra en la
ilustración 89.
Ilustración 89. Resultado de los registros.
Fuente: (Propia, Software SCENE)
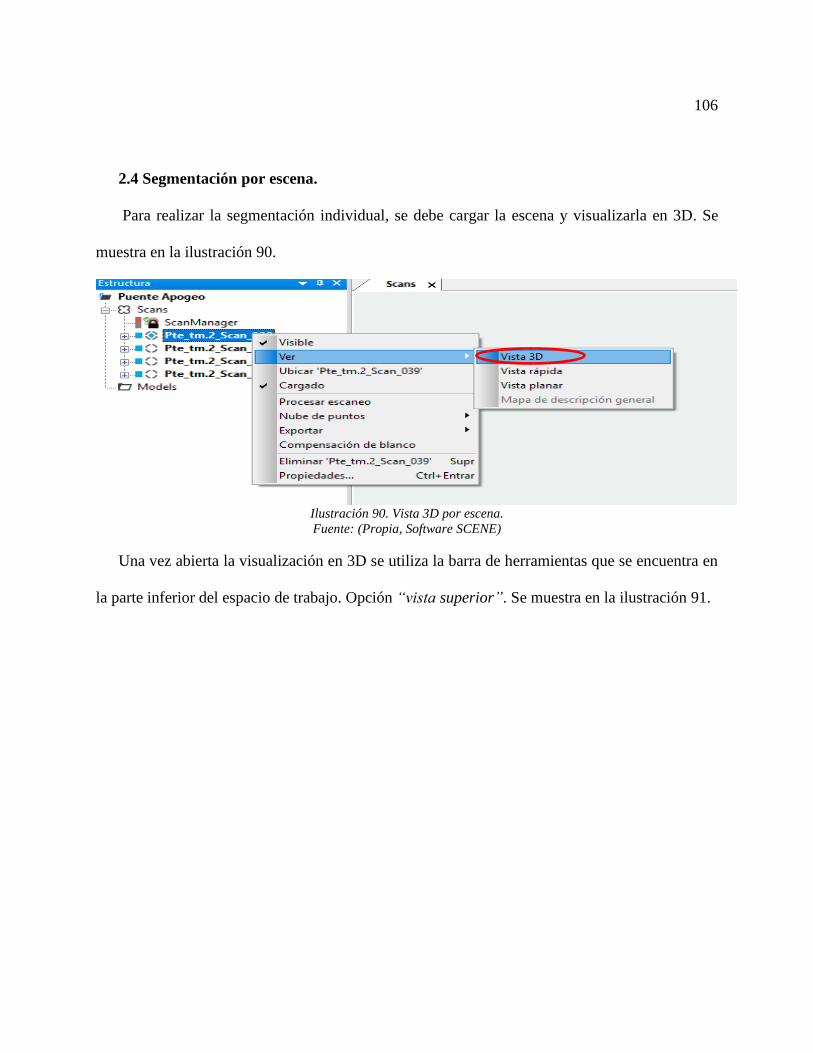
106
2.4 Segmentación por escena.
Para realizar la segmentación individual, se debe cargar la escena y visualizarla en 3D. Se
muestra en la ilustración 90.
Ilustración 90. Vista 3D por escena.
Fuente: (Propia, Software SCENE)
Una vez abierta la visualización en 3D se utiliza la barra de herramientas que se encuentra en
la parte inferior del espacio de trabajo. Opción “vista superior”. Se muestra en la ilustración 91.
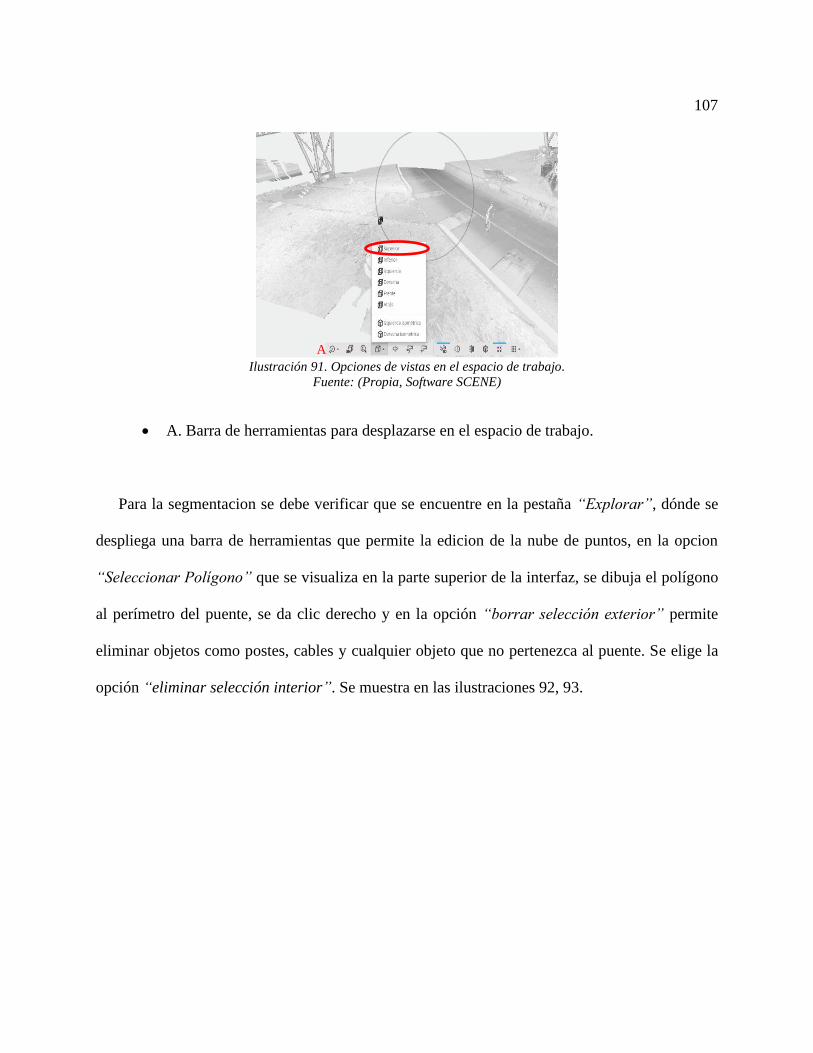
107
Ilustración 91. Opciones de vistas en el espacio de trabajo.
Fuente: (Propia, Software SCENE)
• A. Barra de herramientas para desplazarse en el espacio de trabajo.
Para la segmentacion se debe verificar que se encuentre en la pestaña “Explorar”, dónde se
despliega una barra de herramientas que permite la edicion de la nube de puntos, en la opcion
“Seleccionar Polígono” que se visualiza en la parte superior de la interfaz, se dibuja el polígono
al perímetro del puente, se da clic derecho y en la opción “borrar selección exterior” permite
eliminar objetos como postes, cables y cualquier objeto que no pertenezca al puente. Se elige la
opción “eliminar selección interior”. Se muestra en las ilustraciones 92, 93.
A

108
Ilustración 92. Delimitación de la nube de puntos.
Fuente: (Propia, Software SCENE)
• A. Pestaña Explorar el espacio de trabajo.
• B. Seleccionar figuras geométricas para la segmentación.
• C. Herramientas para medir sobre la nube de puntos.
Ilustración 93. Segmentación de la nube de puntos.
Fuente: Software SCENE.
A
B C
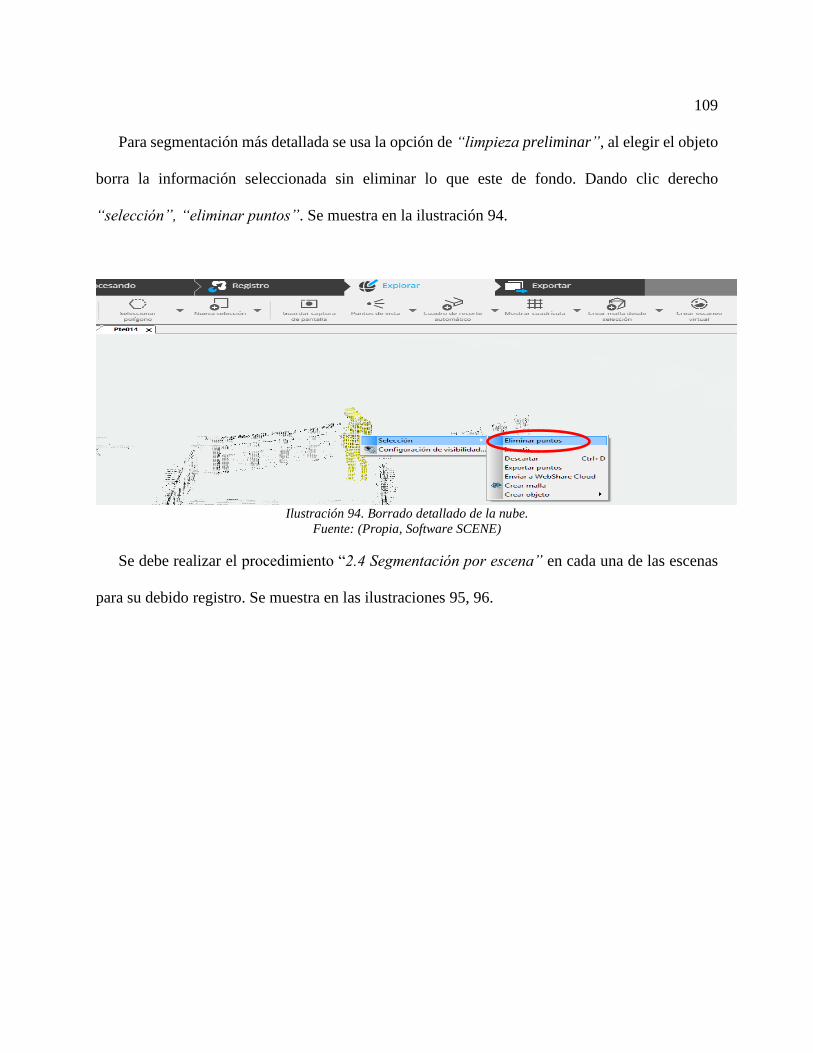
109
Para segmentación más detallada se usa la opción de “limpieza preliminar”, al elegir el objeto
borra la información seleccionada sin eliminar lo que este de fondo. Dando clic derecho
“selección”, “eliminar puntos”. Se muestra en la ilustración 94.
Ilustración 94. Borrado detallado de la nube.
Fuente: (Propia, Software SCENE)
Se debe realizar el procedimiento “2.4 Segmentación por escena” en cada una de las escenas
para su debido registro. Se muestra en las ilustraciones 95, 96.
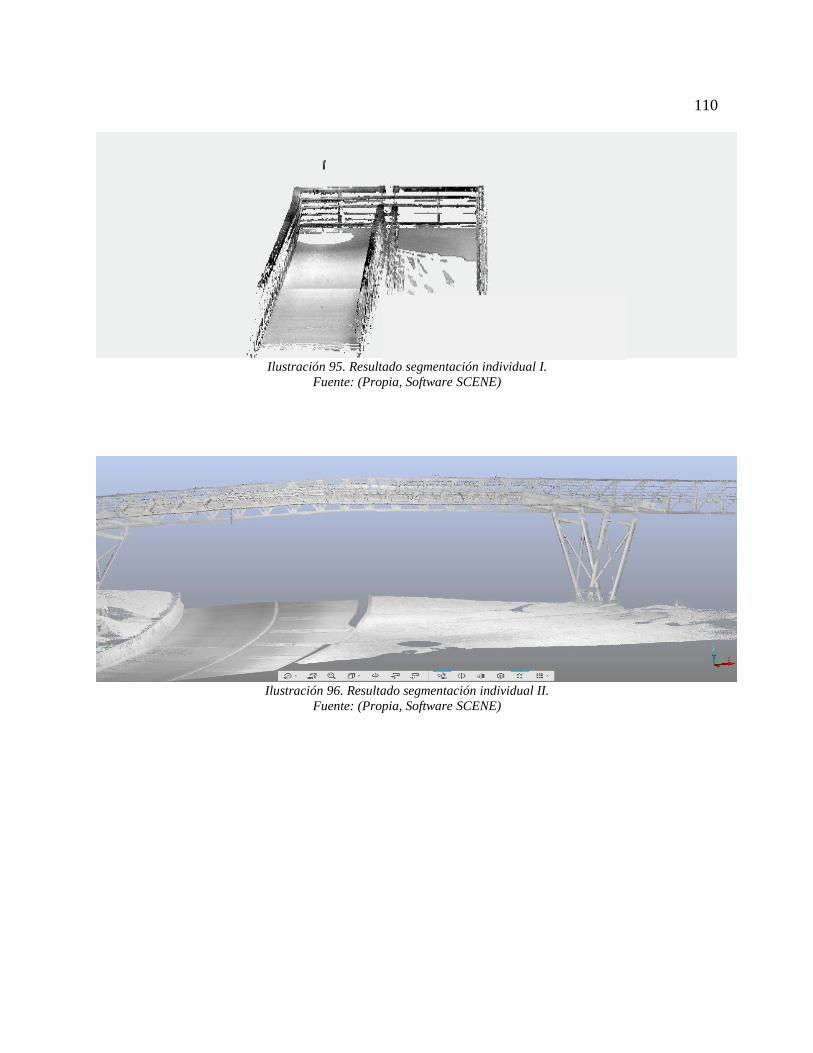
110
Ilustración 95. Resultado segmentación individual I.
Fuente: (Propia, Software SCENE)
Ilustración 96. Resultado segmentación individual II.
Fuente: (Propia, Software SCENE)
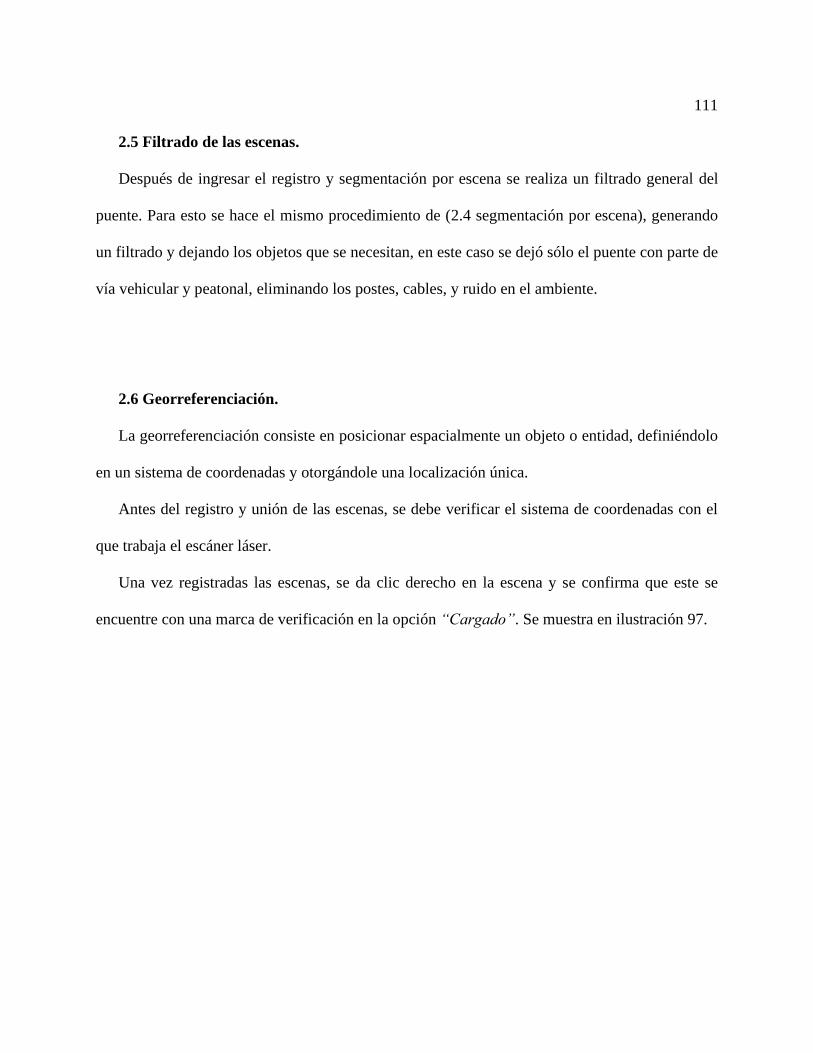
111
2.5 Filtrado de las escenas.
Después de ingresar el registro y segmentación por escena se realiza un filtrado general del
puente. Para esto se hace el mismo procedimiento de (2.4 segmentación por escena), generando
un filtrado y dejando los objetos que se necesitan, en este caso se dejó sólo el puente con parte de
vía vehicular y peatonal, eliminando los postes, cables, y ruido en el ambiente.
2.6 Georreferenciación.
La georreferenciación consiste en posicionar espacialmente un objeto o entidad, definiéndolo
en un sistema de coordenadas y otorgándole una localización única.
Antes del registro y unión de las escenas, se debe verificar el sistema de coordenadas con el
que trabaja el escáner láser.
Una vez registradas las escenas, se da clic derecho en la escena y se confirma que este se
encuentre con una marca de verificación en la opción “Cargado”. Se muestra en ilustración 97.
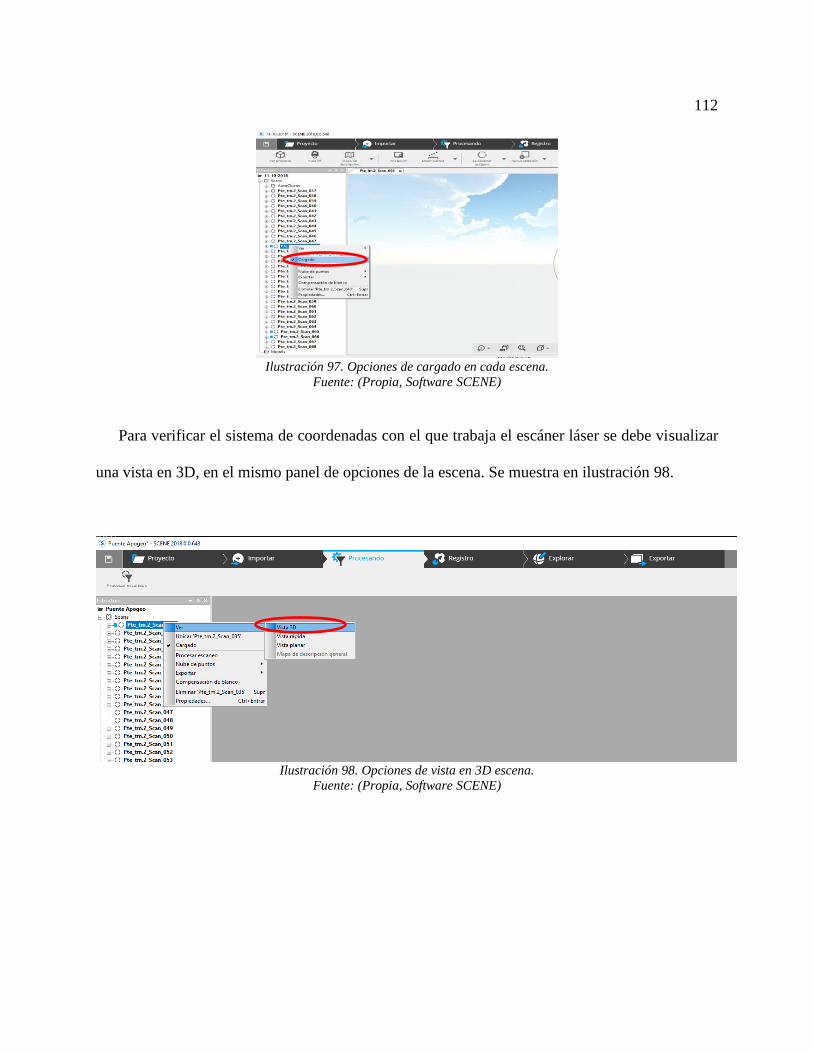
112
Ilustración 97. Opciones de cargado en cada escena.
Fuente: (Propia, Software SCENE)
Para verificar el sistema de coordenadas con el que trabaja el escáner láser se debe visualizar
una vista en 3D, en el mismo panel de opciones de la escena. Se muestra en ilustración 98.
Ilustración 98. Opciones de vista en 3D escena.
Fuente: (Propia, Software SCENE)
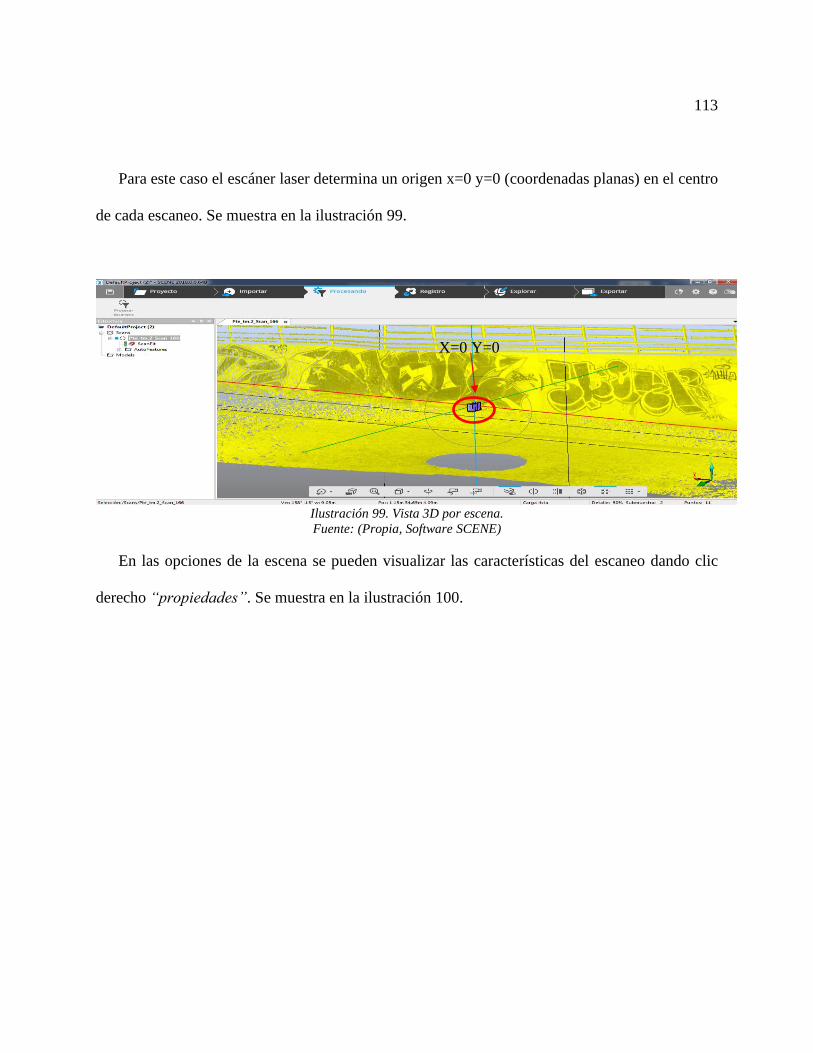
113
Para este caso el escáner laser determina un origen x=0 y=0 (coordenadas planas) en el centro
de cada escaneo. Se muestra en la ilustración 99.
Ilustración 99. Vista 3D por escena.
Fuente: (Propia, Software SCENE)
En las opciones de la escena se pueden visualizar las características del escaneo dando clic
derecho “propiedades”. Se muestra en la ilustración 100.
X=0 Y=0
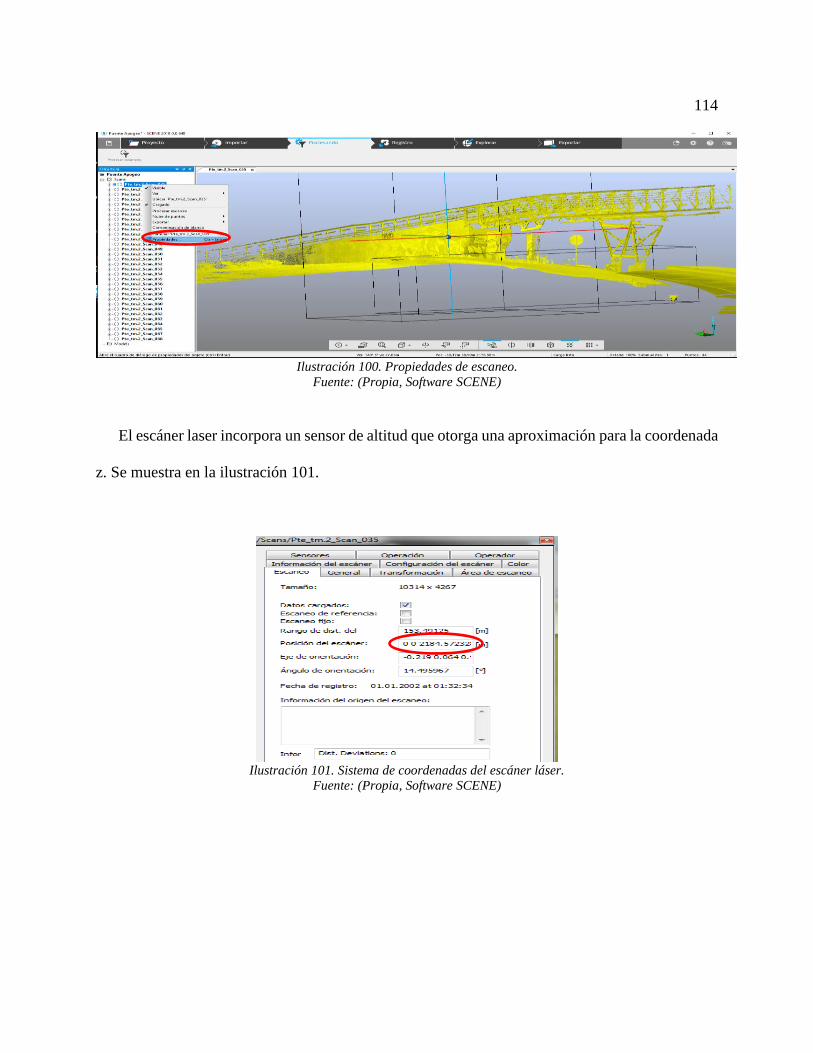
114
Ilustración 100. Propiedades de escaneo.
Fuente: (Propia, Software SCENE)
El escáner laser incorpora un sensor de altitud que otorga una aproximación para la coordenada
z. Se muestra en la ilustración 101.
Ilustración 101. Sistema de coordenadas del escáner láser.
Fuente: (Propia, Software SCENE)
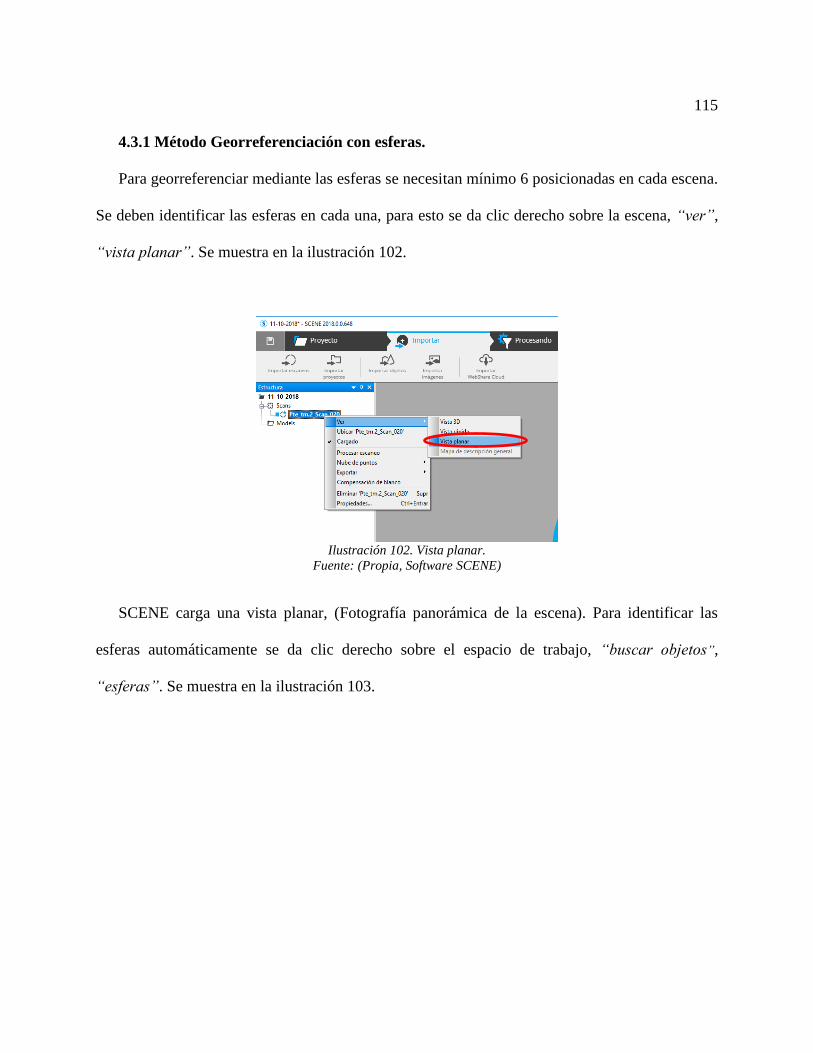
115
4.3.1 Método Georreferenciación con esferas.
Para georreferenciar mediante las esferas se necesitan mínimo 6 posicionadas en cada escena.
Se deben identificar las esferas en cada una, para esto se da clic derecho sobre la escena, “ver”,
“vista planar”. Se muestra en la ilustración 102.
Ilustración 102. Vista planar.
Fuente: (Propia, Software SCENE)
SCENE carga una vista planar, (Fotografía panorámica de la escena). Para identificar las
esferas automáticamente se da clic derecho sobre el espacio de trabajo, “buscar objetos”,
“esferas”. Se muestra en la ilustración 103.
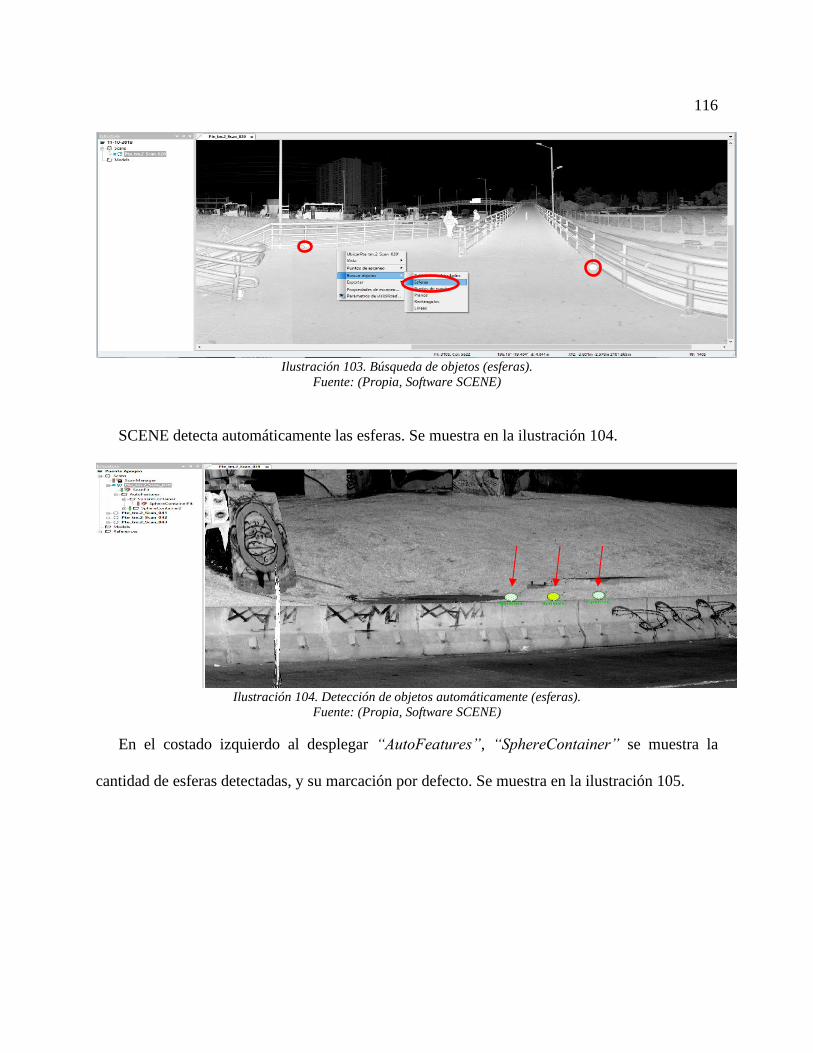
116
Ilustración 103. Búsqueda de objetos (esferas).
Fuente: (Propia, Software SCENE)
SCENE detecta automáticamente las esferas. Se muestra en la ilustración 104.
Ilustración 104. Detección de objetos automáticamente (esferas).
Fuente: (Propia, Software SCENE)
En el costado izquierdo al desplegar “AutoFeatures”, “SphereContainer” se muestra la
cantidad de esferas detectadas, y su marcación por defecto. Se muestra en la ilustración 105.
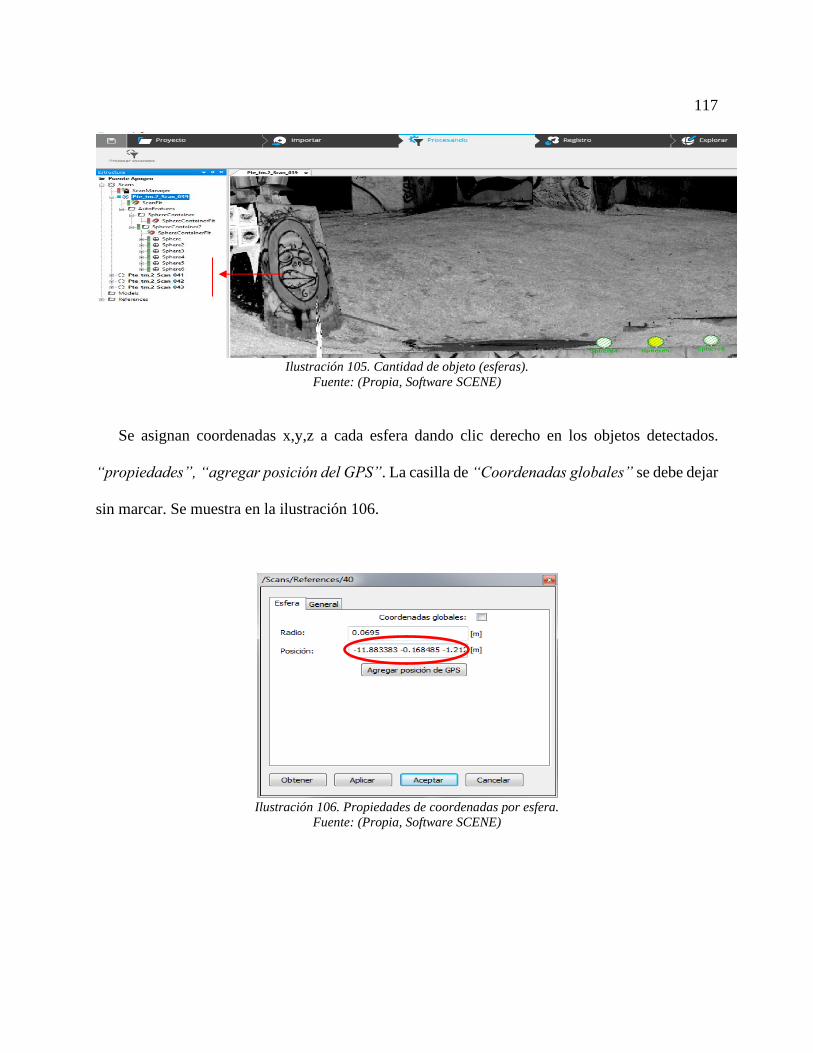
117
Ilustración 105. Cantidad de objeto (esferas).
Fuente: (Propia, Software SCENE)
Se asignan coordenadas x,y,z a cada esfera dando clic derecho en los objetos detectados.
“propiedades”, “agregar posición del GPS”. La casilla de “Coordenadas globales” se debe dejar
sin marcar. Se muestra en la ilustración 106.
Ilustración 106. Propiedades de coordenadas por esfera.
Fuente: (Propia, Software SCENE)
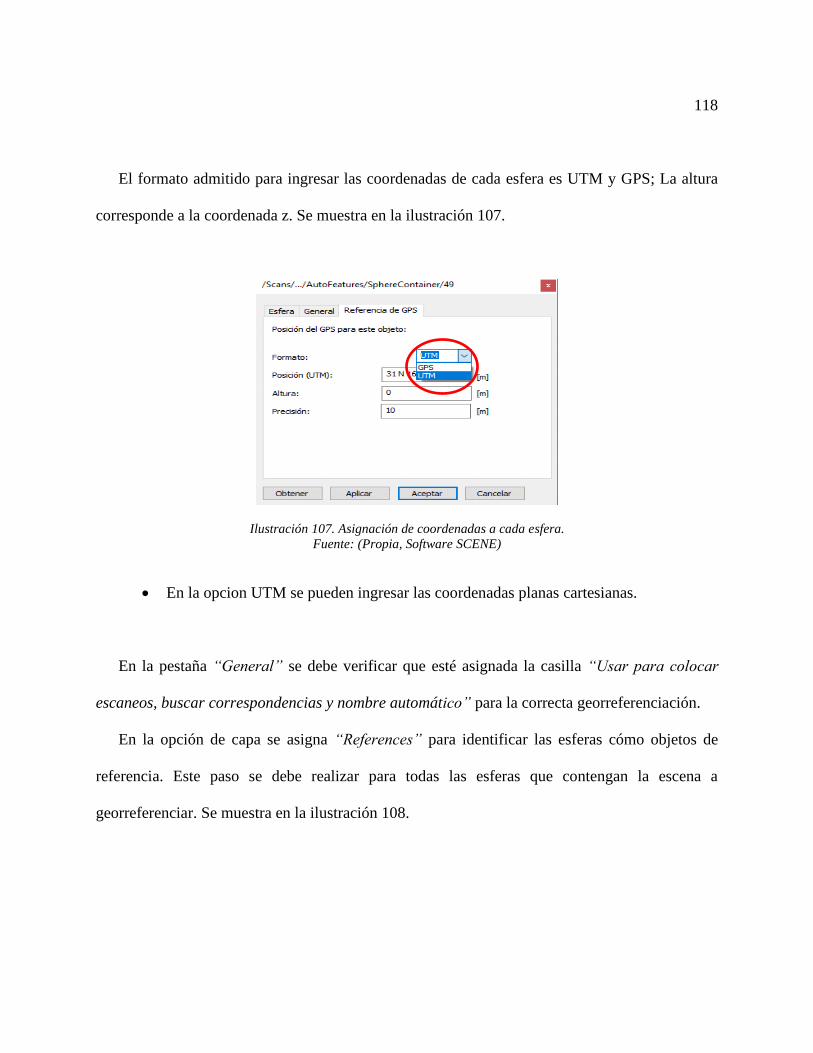
118
El formato admitido para ingresar las coordenadas de cada esfera es UTM y GPS; La altura
corresponde a la coordenada z. Se muestra en la ilustración 107.
Ilustración 107. Asignación de coordenadas a cada esfera.
Fuente: (Propia, Software SCENE)
• En la opcion UTM se pueden ingresar las coordenadas planas cartesianas.
En la pestaña “General” se debe verificar que esté asignada la casilla “Usar para colocar
escaneos, buscar correspondencias y nombre automático” para la correcta georreferenciación.
En la opción de capa se asigna “References” para identificar las esferas cómo objetos de
referencia. Este paso se debe realizar para todas las esferas que contengan la escena a
georreferenciar. Se muestra en la ilustración 108.

119
Ilustración 108. Asignación de uso y capa en cada esfera.
Fuente: (Propia, Software SCENE).
Una vez establecidas las coordenadas a las 6 esferas se debe crear un origen, para esto se da
clic derecho en “SphereContainer”, “Operaciones”, “Sistema global”, “Configurar como origen
global”. Se muestra en la ilustración 109.
Ilustración 109. Configuración origen global.
Fuente: (Propia, Software SCENE)
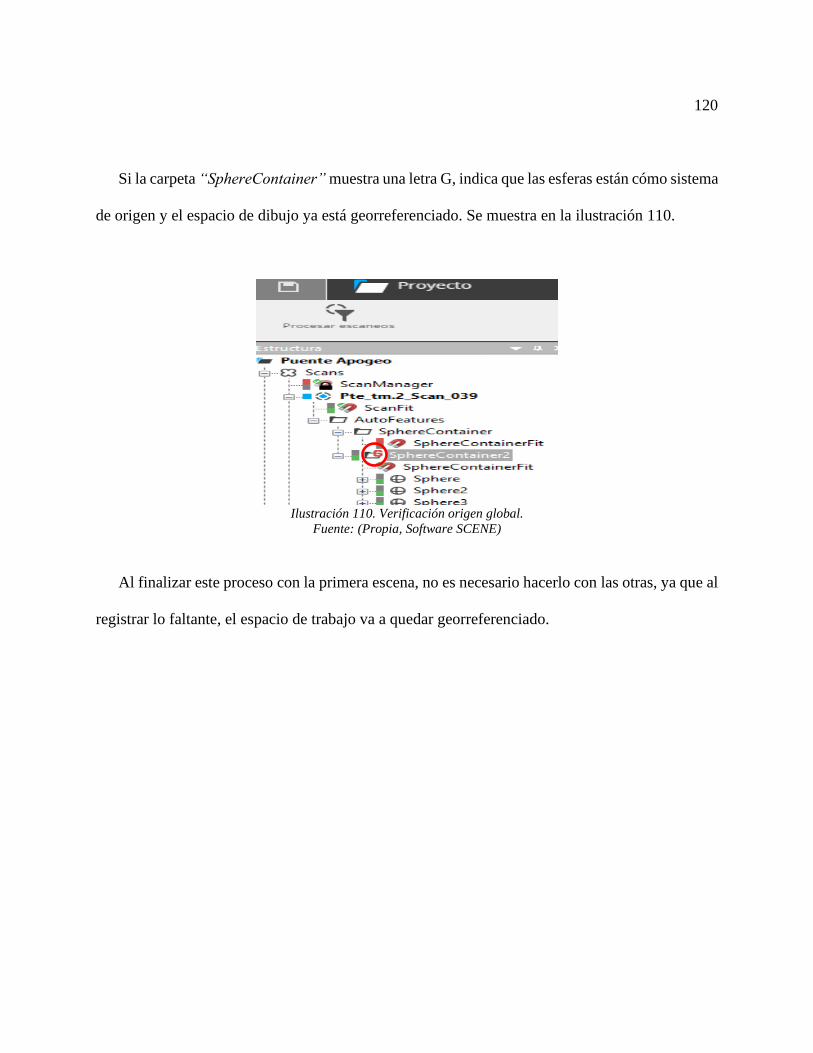
120
Si la carpeta “SphereContainer” muestra una letra G, indica que las esferas están cómo sistema
de origen y el espacio de dibujo ya está georreferenciado. Se muestra en la ilustración 110.
Ilustración 110. Verificación origen global.
Fuente: (Propia, Software SCENE)
Al finalizar este proceso con la primera escena, no es necesario hacerlo con las otras, ya que al
registrar lo faltante, el espacio de trabajo va a quedar georreferenciado.
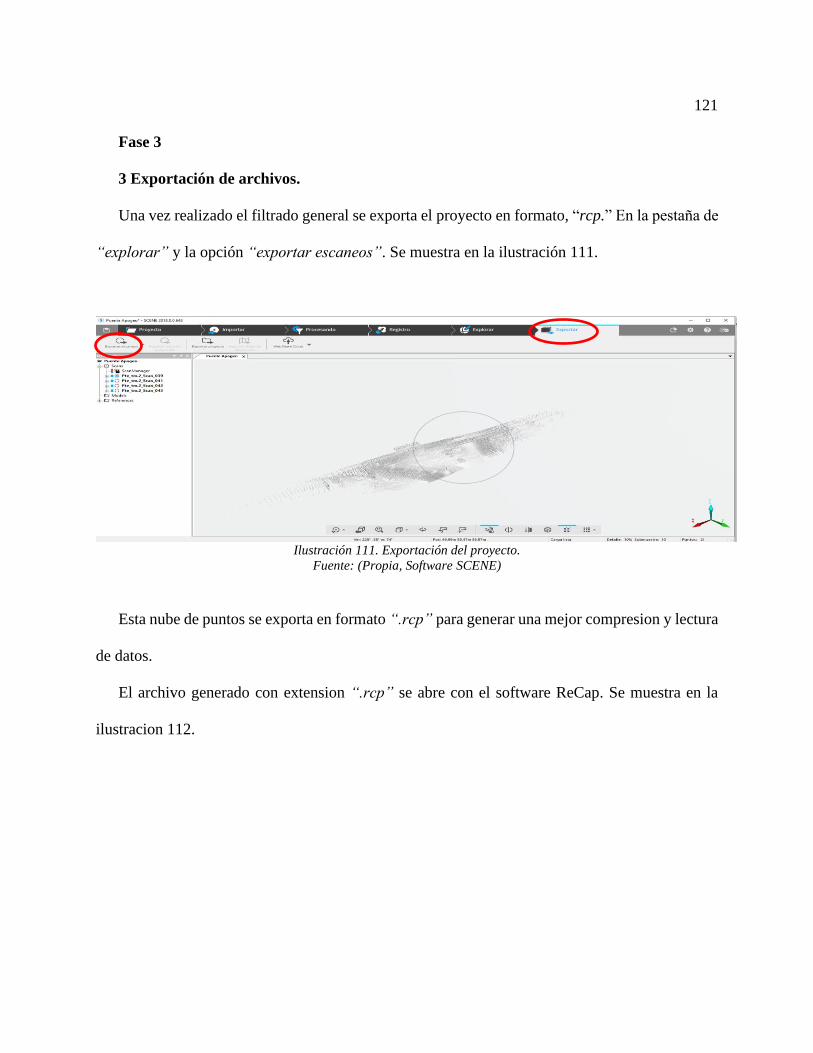
121
Fase 3
3 Exportación de archivos.
Una vez realizado el filtrado general se exporta el proyecto en formato, “rcp.” En la pestaña de
“explorar” y la opción “exportar escaneos”. Se muestra en la ilustración 111.
Ilustración 111. Exportación del proyecto.
Fuente: (Propia, Software SCENE)
Esta nube de puntos se exporta en formato “.rcp” para generar una mejor compresion y lectura
de datos.
El archivo generado con extension “.rcp” se abre con el software ReCap. Se muestra en la
ilustracion 112.
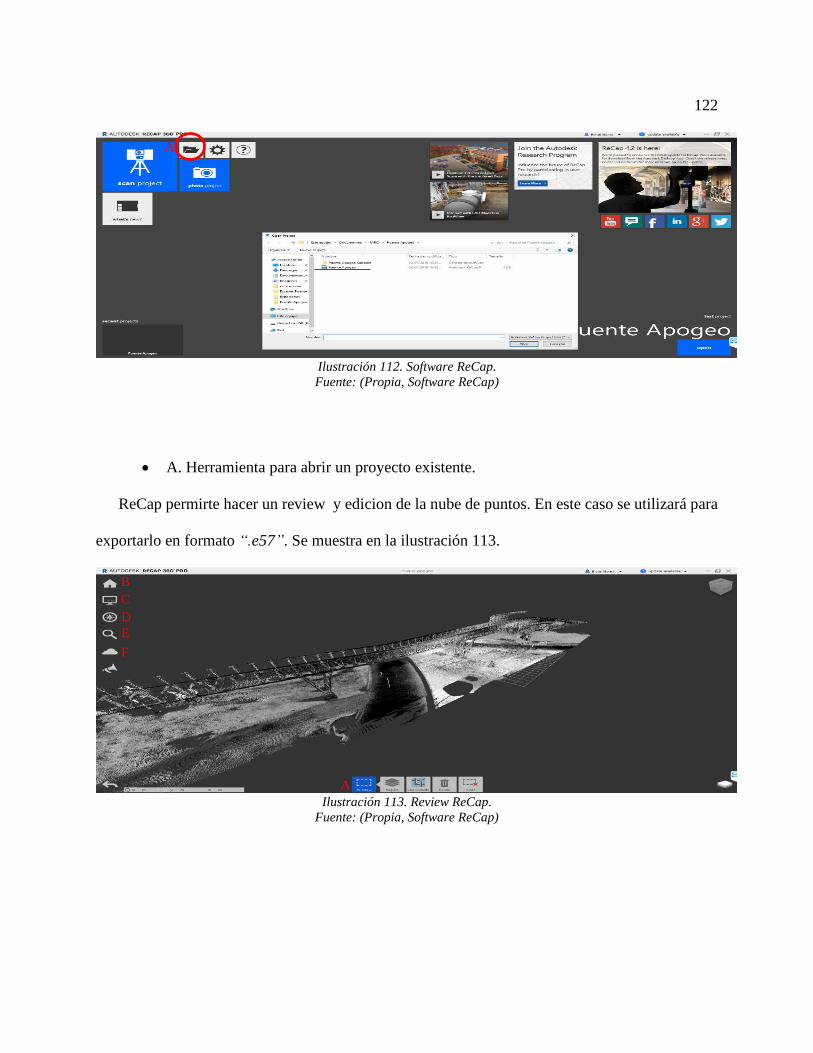
122
Ilustración 112. Software ReCap.
Fuente: (Propia, Software ReCap)
• A. Herramienta para abrir un proyecto existente.
ReCap permirte hacer un review y edicion de la nube de puntos. En este caso se utilizará para
exportarlo en formato “.e57”. Se muestra en la ilustración 113.
Ilustración 113. Review ReCap.
Fuente: (Propia, Software ReCap)
A
A
B
C
D
E
F
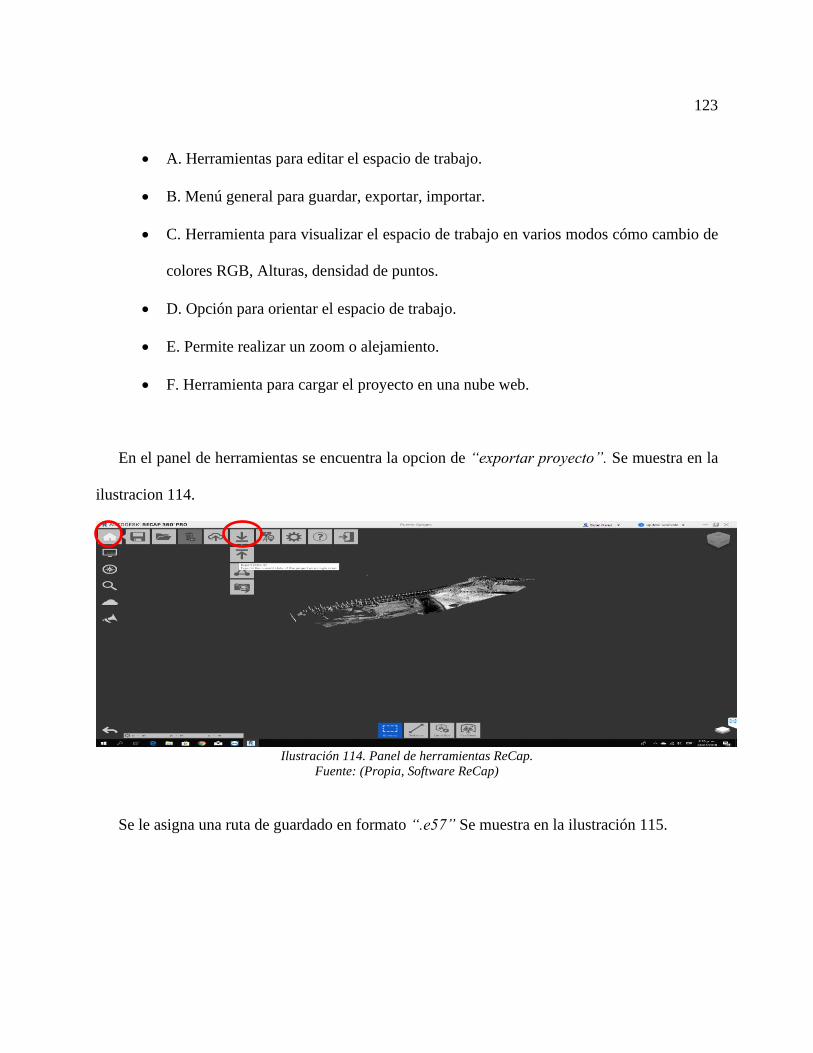
123
• A. Herramientas para editar el espacio de trabajo.
• B. Menú general para guardar, exportar, importar.
• C. Herramienta para visualizar el espacio de trabajo en varios modos cómo cambio de
colores RGB, Alturas, densidad de puntos.
• D. Opción para orientar el espacio de trabajo.
• E. Permite realizar un zoom o alejamiento.
• F. Herramienta para cargar el proyecto en una nube web.
En el panel de herramientas se encuentra la opcion de “exportar proyecto”. Se muestra en la
ilustracion 114.
Ilustración 114. Panel de herramientas ReCap.
Fuente: (Propia, Software ReCap)
Se le asigna una ruta de guardado en formato “.e57” Se muestra en la ilustración 115.
124
Ilustración 115. Exportación ReCap.
Fuente: (Propia, Software ReCap)
5. Modelación
Para la modelación se utilizará a preferencia el software 3DReshaper.
Se abre el archivo generado por el software ReCap con extensión “.e57”. Se muestra en las
ilustraciones 116, 117.
Ilustración 116. Importación Nuble de puntos.
Fuente: (Propia, 3DReshaper)
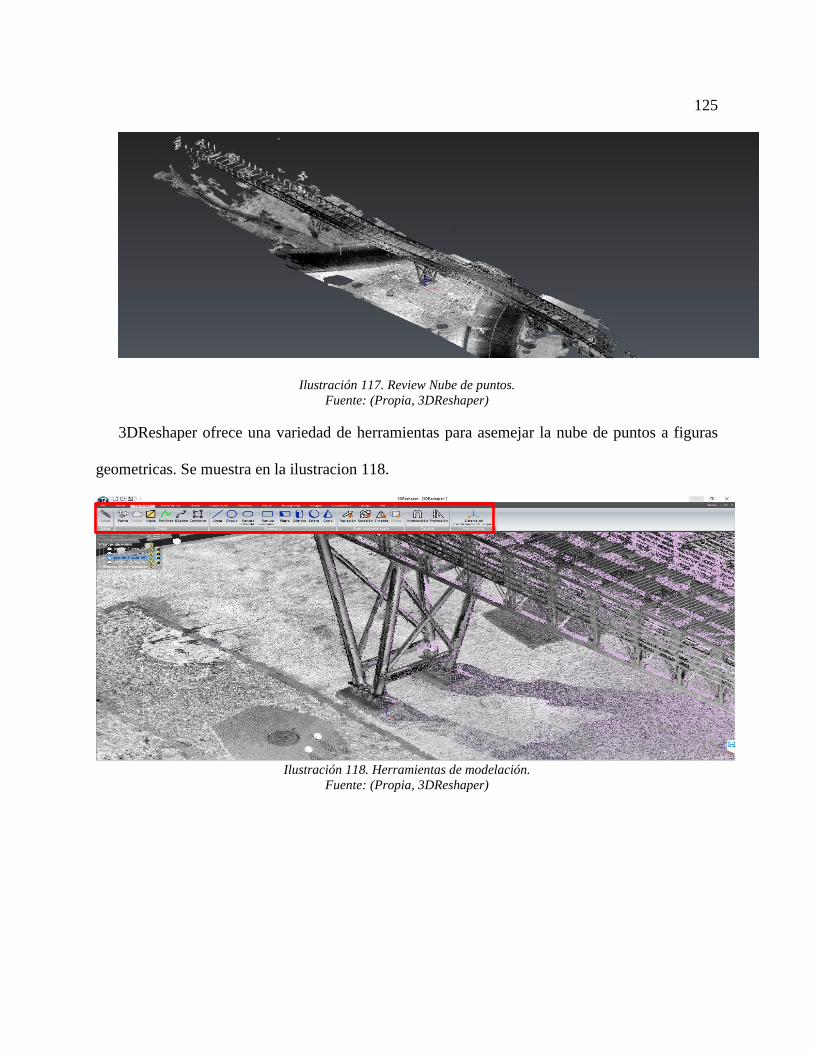
125
Ilustración 117. Review Nube de puntos.
Fuente: (Propia, 3DReshaper)
3DReshaper ofrece una variedad de herramientas para asemejar la nube de puntos a figuras
geometricas. Se muestra en la ilustracion 118.
Ilustración 118. Herramientas de modelación.
Fuente: (Propia, 3DReshaper)
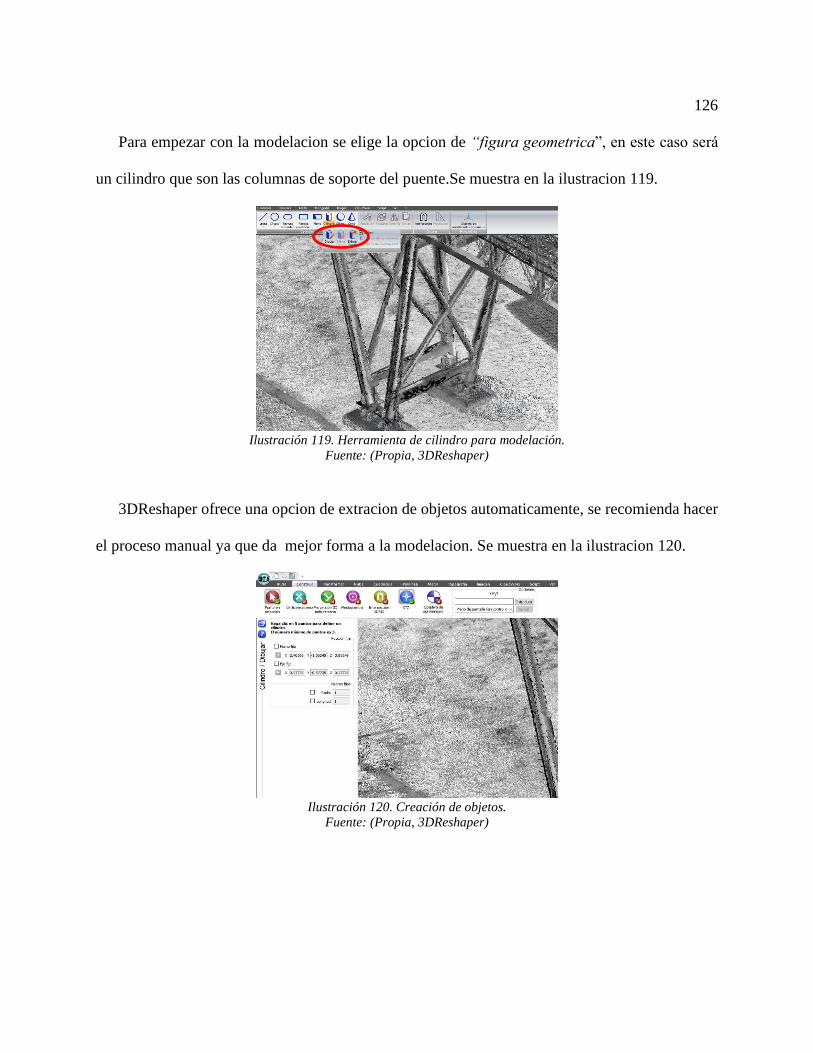
126
Para empezar con la modelacion se elige la opcion de “figura geometrica”, en este caso será
un cilindro que son las columnas de soporte del puente.Se muestra en la ilustracion 119.
Ilustración 119. Herramienta de cilindro para modelación.
Fuente: (Propia, 3DReshaper)
3DReshaper ofrece una opcion de extracion de objetos automaticamente, se recomienda hacer
el proceso manual ya que da mejor forma a la modelacion. Se muestra en la ilustracion 120.
Ilustración 120. Creación de objetos.
Fuente: (Propia, 3DReshaper)

127
Al dibujar se debe rotar el espacio de trabajo para seleccionar todas las caras del cilindro
teniendo oprimido clic derecho y desplazando el mouse, así permite una mejor aproximacion del
objeto que se va a dibujar. Se muestra en la ilustracion 121.
Ilustración 121. Aproximación objeto con nube de puntos.
Fuente: (Propia, 3DReshaper)
Despúes de crear el cilindro se genera un grupo geometrico en la parte izquierda del panel,
donde se pueden editar los objetos y así asemejarlos a su geometría real. Se muestra en la
ilustracion 122.
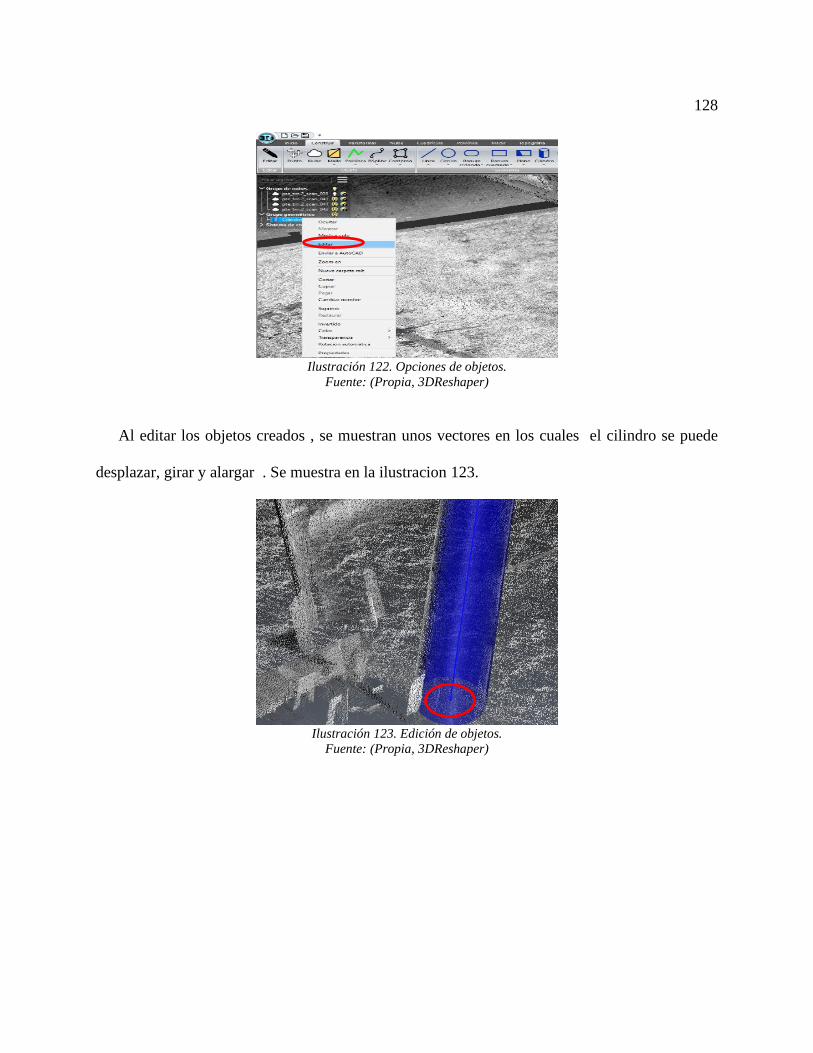
128
Ilustración 122. Opciones de objetos.
Fuente: (Propia, 3DReshaper)
Al editar los objetos creados , se muestran unos vectores en los cuales el cilindro se puede
desplazar, girar y alargar . Se muestra en la ilustracion 123.
Ilustración 123. Edición de objetos.
Fuente: (Propia, 3DReshaper)
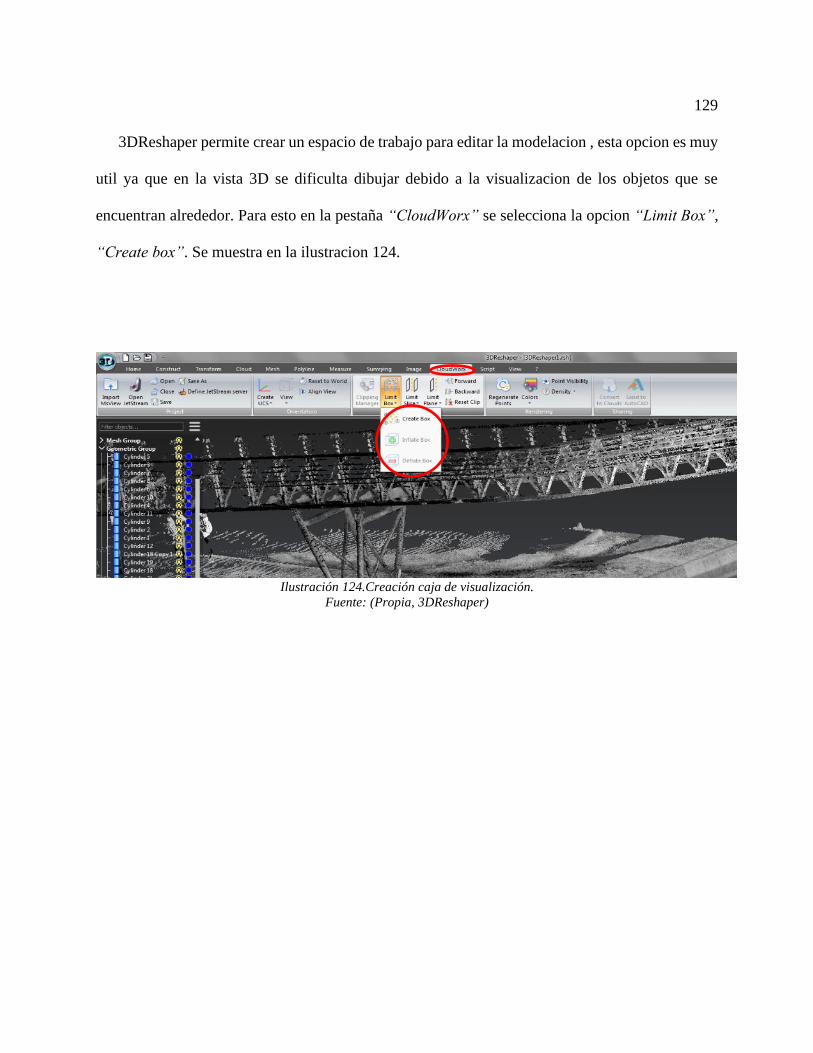
129
3DReshaper permite crear un espacio de trabajo para editar la modelacion , esta opcion es muy
util ya que en la vista 3D se dificulta dibujar debido a la visualizacion de los objetos que se
encuentran alrededor. Para esto en la pestaña “CloudWorx” se selecciona la opcion “Limit Box”,
“Create box”. Se muestra en la ilustracion 124.
Ilustración 124.Creación caja de visualización.
Fuente: (Propia, 3DReshaper)
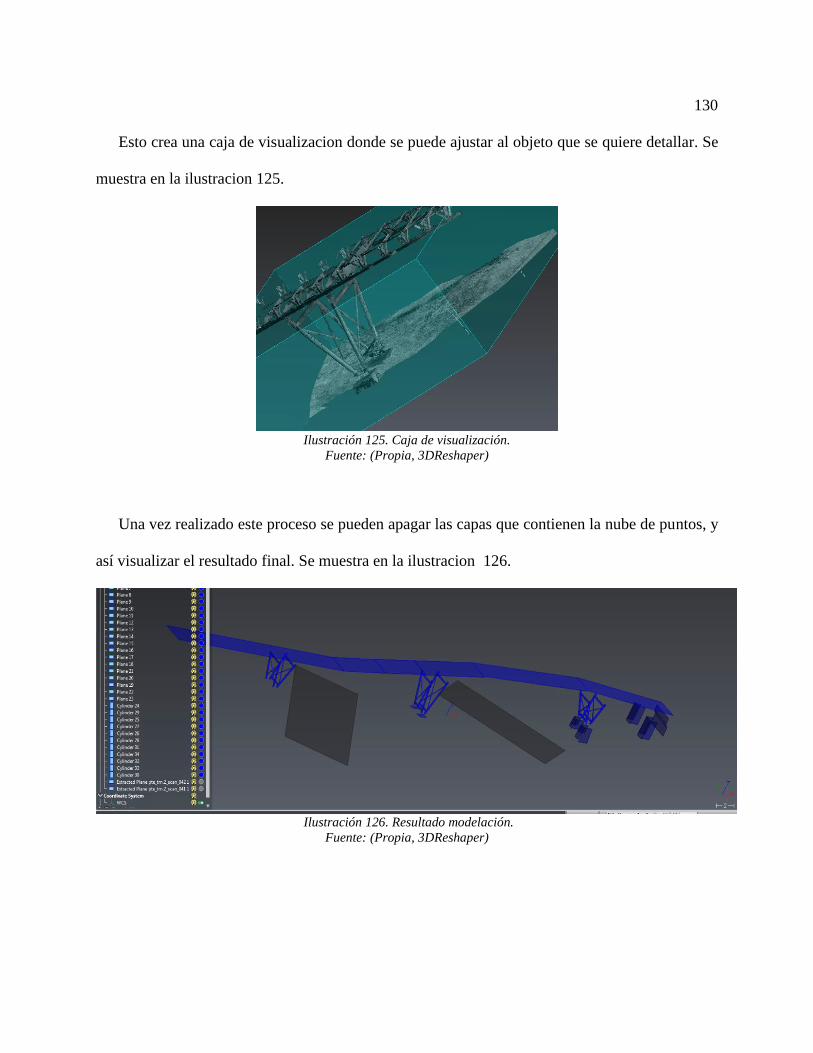
130
Esto crea una caja de visualizacion donde se puede ajustar al objeto que se quiere detallar. Se
muestra en la ilustracion 125.
Ilustración 125. Caja de visualización.
Fuente: (Propia, 3DReshaper)
Una vez realizado este proceso se pueden apagar las capas que contienen la nube de puntos, y
así visualizar el resultado final. Se muestra en la ilustracion 126.
Ilustración 126. Resultado modelación.
Fuente: (Propia, 3DReshaper)
131
6. RESULTADOS.
1. Se registraron 3 puentes levantados con escáner laser con el software SCENE teniendo
cómo resultado:
a. El puente Apogeo, al filtrar y segmentar la nube de puntos se redujo el tamaño del
proyecto a 80.1GB en formato .fls.
b. El puente SuperCADE, al filtrar y segmentar la nube de puntos se redujo el tamaño
del proyecto a 74.2GB en formato fls.
c. El puente Perdomo, al filtrar y segmentar la nube de puntos se redujo el tamaño del
proyecto a 65.3GB en formato fls.
2. Se logró georreferenciar los 3 puentes registrados respecto a los puntos posicionados
en campo con el siguiente error:
a. El puente Apogeo, error +-3mm + 1ppm.
b. El puente SuperCADE, error +-3mm + 1ppm.
c. El puente Perdomo, error +-2mm + 1ppm.
3. Se exportaron los 3 proyectos registrados (nube de puntos) de .fls a .e57
a. El puente Apogeo, formato .e57 125MB.
b. El puente SuperCADE, formato .e57 112MB.
c. El puente Perdomo, formato .e57 97MB.
132
4. Para los 3 proyectos (nube de puntos) se generó una modelación de las partes
generales del puente con el software 3DReshaper.
5. El resultado los 3 puentes fue nivel de desarrollo tipo LOD 100 para la metodología
BIM (Building Information Modeling).
133
7. CONCLUSIONES
➢ Los levantamientos topográficos con tecnología LIDAR a diferencia de lo convencional
dónde normalmente se refleja una precisión de -+2cm, en este proyecto la precisión de los
puentes fue de -+3mm aproximadamente.
➢ En el registro es importante la detección de esferas ya que en el primer puente SuperCADE,
se localizaron esferas de color amarillo y rojo, debido a esto, se tuvo que repetir una serie
de escaneos. Se debe tener en cuenta (2.3 Fotos en campo.Ilustración 127. Tabla resolución
de detección de esferas.)
➢ La precisión depende de la planeación de los posicionamientos del escáner láser terrestre
ya que al realizar el levantamiento del ultimo puente (Perdomo) mejoró -+1mm respecto a
los otros.
134
8. RECOMENDACIONES
1. Para conocer más sobre el procedimiento del trabajo realizado en campo se
recomienda consultar: “DOCUMENTO GUÍA PARA EL LEVANTAMIENTO
TOPOGRÁFICO DE PUENTES PEATONALES, MEDIANTE
ESCENOGRAFÍA LASER TERRESTRE”. Que es complemento de este proyecto.
2. Para realizar el postproceso se recomienda utilizar un equipo que cumpla las
siguientes características básicas, ya que el software SCENE requiere de recursos
altos para ejecutar nubes con millones de puntos:
• Procesador: 8 núcleos físicos, por ejemplo Intel Core i7/i9/Xeon.
• Tarjeta gráfica: Tarjeta gráfica específica, OpenGL 4.1 o superior, como mínimo 16
GB de memoria, renderizado en estéreo: NVIDIA Quadro.
• Memoria principal: 64 GB de RAM.
• Disco duro: disco duro de estado sólido de 1 TB y HDD convencional.
• Sistema operativo Windows™ de 64 bits.
135
• Nota: Para este proyecto el tiempo aproximado de procesamiento por puente fue de 5
días, teniendo en cuenta los requisitos de hardware anteriores.
3. Llevar una secuencia al momento de registrar las escenas ya que estas tienen
aspectos similares y pueden ocasionar registros erróneos.
4. Antes de realizar el postproceso se debe verificar toda la información de campo ya
que se pueden presentar errores en los archivos generados por el escáner láser y este
puede ocasionar problemas al momento de registrar una secuencia de escenas.
5. Se deben guardar los archivos en una carpeta ya que el software SCENE genera
subcarpetas y extensiones que permiten el uso de la misma.
6. En la modelación no es aconsejable utilizar la detección automática de figuras
geometrías ya que pierde precisión respecto a la nube de puntos.
7. Para la segmentación de escenas se debe ir guardando continuamente en el software
SCENE debido que presenta cierres inesperados y se puede perder el progreso del
proyecto.
136
8. REFERENCIAS BIBLIOGRÁFICAS
• Faro. (2011). Ram required to load scans at full resolution. Microsoft Excel.
• Faro. (2008). Number of Scan Points for Spherical Target Fits at Various Distances and
Resolution Settings. Microsoft Excel.
• Faro. (2013). Manual del Faro Laser Scanner Focus 3D. Obtenido de
https://faro.app.box.com/s/0k0lvfzt1508t96aiodjy76zigqgpga2
• Building Smart (s.f) Nivel de desarrollo LOD. Definiciones, innovaciones y adaptación
a España. Recuperado de
https://escuelaedificacion.org/images/zoo/uploads/PDF/PRESENCIALES/MBIM/Rev
ista_Building_Smart_JAM_Art.pdf
• Geosystems. (s.f.). Leica ScanStation P40 / P30 - High-Definition 3D Laser Scanning
Solution. Hexagon Geosystems. Recuperado de https://leica-
geosystems.com/products/laser-scanners/scanners/leica-scanstation-p40--p30
• Geomares (s.f) Hidrología, Oceanografía y geofísica marina, Recuperado de
http://geomares.com/hidrografia-oceanografia-y-geofisica-marina/
• LIDAR and RADAR Information (2017) Recuperado de http://lidarradar.com/apps/15-
lidar-applications-in-agriculture
137
• Desktop (s.f) Recuperado de (http://desktop.arcgis.com/es/arcmap/10.3/manage-
data/las-dataset/GUID-A93C964C-F417-4523-B391-4931C05AFF31-web.png)
• Instop (2018) Que es un escáner laser 3D, Recuperado de
http://blog.instop.es/qu%C3%A9-%C3%A9s-un-escaner-laser-3d
• Martinez (2017) Aplicaciones tecnología LIDAR, Recuperado de
https://www.nobbot.com/futuro/tecnologia-lidar/
• IDU (2018) Inventario de puentes, Recuperado de
http://idu.maps.arcgis.com/apps/Cascade/index.html?appid=58f2471284f7498495127
bc853246dd3
Recommended