ESCUELA [POLITÉCNICA 1SI ACIÓN AL
FACULTAD DE INGENIERIA ELECTRICA
'MODELACIÓN DIGITAL DE UN GENERADOR
DE INDUCCIÓN ACOPLADO A UNA BARRA
INFINITA"
TESIS PREVIA A LA OBTENCIÓN
DEL TITULO DE INGENIERO EN
ELECTRÓNICA Y CONTROL
GARLO S OSWALDO GRIJALVA GARRIDO
QUITO, DICIEMBRE DE
CERTIFICO QUE EL PRESENTE TRABAJO
FUE REALIZADO EN SU TOTALIDAD POR
EL BEKOR OSWALDO G R I J A L V A GARRIDO
BAJO MI DIRECCIÓN.
ING. JORGE MORA.
Director de Tesis
A MI MADREY HERMANOS.

AGRADEOIMIENTO
Mi más sincero agradecimiento al Sr. Ing. Jorge Mora,Director de Tesis, con cuya valiosa colaboración hapermitido realizar la elavoración del presentetrabaj o.

Í N D I C E
Página
INTRODUCCIÓN
CAPITULO I : EL GENERADOR DE INDUCCIÓN ACOPLADO A UN S.E.P.
Introducción
1.1 TEORÍA DEL GENERADOR DE INDUCCIÓN 2
1.1.1 Ecuaciones generales 5
1.1.1.1 Voltajes y corrientes en el estator 5
1.1.1.2 Circuito equivalente 7
1.1.1.3 Diagrama fasorial de la máquina de inducción
como generador 9
1.2 ECUACIONES DE LA MAQUINA DE INDUCCIÓN EN LOS
EJES a, b, c 10
1.2.1 Consideraciones para el análisis 10
1.2.2 Ecuaciones de voltaje 12
1.2.3 Ecuaciones de la máquina referidas al estator 14
1.2.4 Ecuación del torque electromagnético 15
1.3 TRANSFORMACIÓN DE LAS ECUACIONES DE LA MAQUINA
A UN SISTEMA DE EJES ARBITRARIOS DE REFERENCIA
q.d.o 16
1.3.1 Ecuaciones de las concatenaciones de flujo en
variables q,d,o 19
1.3.2 Ecuaciones de voltaje en variables q,d,o .... 21
1.3.3 Ecuaciones del torque electromagnético 23
1.3.4 Ecuación del torque electromecánico 23
1.3.5 Representación del sistema en variables de
estado 24
1.4 CIRCUITOS EQUIVALENTES DE LA MAQUINA DE
INDUCCIÓN 27
1.4.1 Circuitos equivalentes en ejes q,d,o 27
1.4.2 Circuito equivalente en estado estable 29
1.5 CARACTERÍSTICAS DEL SISTEMA 30
1.5.1 El generador de inducción acoplado a una barra
infinita a través de una línea de transmisión. 30
1.5.2 Saturación del núcleo 32
1.5.3 Voltajes y corrientes del sistema en estado
estable 34
1.5.4 Transferencia de potencia activa y reactiva
entre generador y barra infinita 36
1.6 MODELACIÓN DEL SISTEMA DE POTENCIA EN CONJUNTO 38
1.6.1 Modelación del compensador de potencia reactiva 38
1.6.2 Modelación de la línea de transmisión y barra
infinita 40
1.6.3 Modelo del sistema para cortocircuito trifásico 41
1.6.4 Modelo del sistema para cortocircuito fase -
tierra 42
1.6.5 Modelo del sistema para cortocircuito dos fases
tierra 46
1.6.6 Modelo del sistema para cortocircuito dos fases 48
1.6.7 Modelo del sistema para apertura y reconexión
de fases 50
1.6.8 Análisis electromecánico 52
1.7 ECUACIONES DIFERENCIALES DEL SISTEMA MOTOR -
GENERADOR EN POR UNIDAD 54
CAPITULO II : MODELACIÓN DEL SISTEMA EN CONJUNTO
Introducción
2.1 MÉTODO DE SOLUCIÓN 58
2.1.1 Condiciones de iniciales 58
2.1.2 Método de solución del programa digital 59
2.2 DESCRIPCIÓN DE LOS ALGORITMOS 61
2.2.1 Programa principal 61
2.2.2 Descripción de subprogramas 64
2 . 3 DIAGRAMAS DE FLUJO 67
CAPITULO III : PRUEBAS EXPERIMENTALES DE LABORATORIO
Introducción
3.1 CARACTERÍSTICAS DE ESTADO ESTABLE 76
3.1.1 Generador sin conexión de capacitores 77
3.1.2 Generador con conexión de capacitores 78
3.2 CARACTERÍSTICAS DE ESTADO DINÁMICAS 80
3.2.1 Falla: Cortocircuito trifásico 80
3.2.1.1 Cortocircuito trifásico sin conexión de capaci-
tores 81
3.2.1.2 Cortocircuito trifásico con conexión de capaci-
tores 81
3.2.1.3 Simulaciones de cortocircuito trifásico 82
3.2.2 Falla: Cortocircuito fase - tierra 87
3.2.2.1 Cortocircuito fase - tierra sin conexión de ca-
pacitores 88
3.2.2.2 Cortocircuito fase - tierra con conexión de ca-
pacitores 88
3.2.2.3 Simulaciones de cortocircuito fase - tierra.... 89
3.2.3 Falla : Cortocircuito dos fases - tierra 94
3.2.3.1 Cortocircuito dos fases - tierra sin capacitores 95
3.2.3.2 Cortocircuito dos fases - tierra con capacitores 95
3.2.3.2 Simulaciones de cortocircuito dos fases - tierra 96
3.2.4 Falla: Cortocircuito dos fases 101
3.2.4.1 Cortocircuito dos fases sin conexión de capaci-
toree 102
3.2.4.2 Cortocircuito dos fases con conexión de capaci-
tores 102
3.2.4.3 Simulaciones de cortocircuito dos fases 103
3.2.5 APERTURA Y RECONEXION DE FASES 108
3.2.5.1 Apertura y reconexión sin conexión de capacito-
res 109
3.2.5.2 Apertura y reconexión con conexión de capacito-
res 110
3.2.5.3 Simulaciones de apertura y reconexión de fases. 111
CAPITULO IV : ANÁLISIS DE RESULTADOS
4.1 EFECTOS DEL S.E.P. EN LA OPERACIÓN DEL GENERADOR
DE INDUCCIÓN 117
4.2 COMPARACIÓN Y ANÁLISIS DE RESULTADOS 122
4.2.1 Funcionamiento en estado estable 122
4.2.2 Cortocircuito trifásico 124
4.2.3 Cortocircuito fase - tierra 125
4.2.4 Cortocircuito dos fases - tierra 126
4.2.5 Cortocircuito dos fases tierra 126
4.2.6 Apertura y reconexión de fases 127
CONCLUSIONES 130
RECOMENDACIONES 136
APÉNDICE Al : PARÁMETROS DE LA MAQUINA DE INDUCCIÓN
APÉNDICE A2 : MEDIDA DE LOS PARÁMETROS DE LA LINEA DE ALIMENTA-
CIÓN Y DEL MOTOR DE CORRIENTE CONTINUA
APÉNDICE A3 : MANUAL DE USO DEL PROGRAMA
BIBLIOGRAFÍA
I N T R O D U C C I Ó N
El presente trabado va encaminado a realizar un estudio de
la máquina de inducción funcionando como generador cuando
recibe la potencia reactiva de excitación desde la red eléc-
trica.
Se realiza un análisis del comportamiento que presenta el
generador funcionando en estado estable, asi como cuando se
tienen fenómenos transitorios no previstos, como es el caso de
cortocircuitos y desconexión de fases.
Aprovechando del computador digital, se realiza un programa
que simula la operación de estos inconvenientes en base a
ecuaciones matemáticas. Se ofrece una gran versatilidad y
facilidad de manejo al estar diseñado como un programa interac-
tivo.
En el desarrollo del trabajo se incluye el comportamiento
que tiene el generador de inducción, cuando se conectan capaci-
tores por fase en sus terminales estatoricos, cuya función va
encaminada a regular el factor de potencia y el voltaje así
como la de constituir en soporte de potencia reactiva.
En el primer capítulo se desarrolla el proceso matemático,
que permite establecer el modelo ideal de funcionamiento de la
máquina, con las debidas consideraciones y restricciones.
Valiéndose de artificios matemáticos se realiza la trnasforma-
ción de ecuaciones expresadas en el tiempo al sistema de ejes
QDO, obteniéndose un desarrollo más sencillo; posteriormente
estas ecuaciones se representan en el sistema por unidad que
reducen aun más su complejidad. Se incluye además el comporta-
miento que tiene el motor de corriente continua que constituye
la máquina motriz del generador.
En el segundo capítulo se describen los métodos, algoritmos,
diagramas de flujo y consideraciones realizados para el desa-
rrollo del programa digital.
Las pruebas experimentales de laboratorio, asi como loe
resultados obtenidos de la simulación son presentados en el
tercer capitulo, para los estados estable y transitorio de
funcionamiento de la máquina.
El cuarto capítulo se orienta a realizar una comparación
y análisis de los resultados obtenidos, que permite establecer
la validez del modelo matemático.
C A P I T U L O I
EL GENERADOR DE INDUCCIÓN ACOPLADO A UN S.E.P.
Introducción .-
El propósito de este capítulo es realizar el modelo matemá-
tico, que responde al comportamiento de la máquina que se
conecta a la barra infinita a través de una línea de transmi-
sión, donde además se incluye la saturación magnética del
núcleo, la conexión de capacitores a los terminales del estator
y la respuesta entregada por la máquina motriz.
El generador para su funcionamiento requiere de una potencia
reactiva, la misma que proviene de un generador sincrónico o de
la red eléctrica, siendo su velocidad superior a la sincrónica
la misma que es controlada por la máquina motriz que se encuen-
tra acoplada al eje del rotor.
En caso de producirse una emergencia eléctrica, se pueden
instalar generadores de inducción teniendo presente que es
condición ineludible, que la potencia total de los generadores
ha de ser inferior a la potencia mínima necesaria en la red, a
fin de tener escasa influencia sobre la instalación.
Cabe mencionar que el acoplamiento del generador a la red
eléctrica no presenta dificultades, la máquina motriz es
arrancada primero y cuando alcanza una velocidad por encima de
la sincrónica entonces se pone en marcha el generador» este
procedimiento no requiere gran precisión una vez en línea.
1.1 TEORÍA DEL GENERADOR DE INDUCCIÓN [1, 9, 13, 14]
El generador de inducción es una máquina convertidora de
energía, compuesta por devanados estatoricos y devanados
rotóricos, separados por un entrehierro.
Cuando se excita a los devanados del estator con una co-
rriente alterna polifásica, se crea en el entrehierro un campo
magéntlco rotativo que gira a la velocidad sincrónica ws,
determinada por el número de polos y por la frecuencia f de la
red aplicada al estator, dada por:
ws ~ 2 TI f [ rad. eléctricos / seg ] (1-1)
2 K fws [ rad. mecánicos / seg ] (1.2)
P / 2
120 fws = [R. P. M.] (1.3)
P
donde: f = frecuencia de la red
P = número de polos del generador
La corriente necesaria para la excitación ha de ser total-
mente reactiva proveniente de un generador sincrónico o de la
red.
El rotor puede ser bobinado, con un devanado polifásico
similar al estator y con el mismo número de polos o en su lugar
un rotor Jaula de ardilla cuyo devanado está formado por
varillas conductoras alojadas en ranuras aplicadas en el hierro
del propio rotor y cortocircuitadas en ambos extremos mediante
dos platos conductores dispuestos en cada lado del rotor.
2
La máquina de inducción basa su funcionamiento en la inter-
acción electromagnética entre el campo magnético giratorio y
los voltajes y corrientes inducidos en el rotor.
La interacción electromagnética entre estator y rotor es
posible sólo cuando la velocidad del campo magnético giratorio
ws y la velocidad del rotor wr son distintas, no habrá ningún
efecto de inducción si ambas velocidades son iguales.
Al girar el rotor con la velocidad wr en el campo magné-
tico que gira con la velocidad ws, todo sucede como si el rotor
estubiese inmóvil y el flujo $ gira respecto del rotor con la
velocidad ws, diferencia que se conoce con el nombre de desli-
zamiento:
ws - wr8 r
ws
La máquina de inducción puede funcionar como: transforma-
dor, freno electromagnético, motor y generador.
Cuando la máquina funciona como transformador el rotor se
mantiene en reposo, sea en circuito abierto o cerrado, el campo
magnético del estator gira a una velocidad ws e induce en el
devanado del rotor una fuerza electromotriz Er que tiene la
misma frecuencia f del sistema al que se conecta.
En funcionamiento de la máquina de inducción como motor es
fundamental, en éste régimen la energía se transmite por medio

del campo magnético desde el estator al rotor, así como en el
transformador, con la diferencia de que en este caso la conver-
sión de energía es de eléctrica aplicada al estator a energía
mecánica en el eje del rotor. La velocidad del motor de in-
ducción depende de su carga y se cumple:
0 < wr < ws
o su deslizamiento s: 0 < s < 1
El funcionamiento como freno electromagnético, se da
cuando por un medio motriz externo se hace girar al rotor de la
máquina de inducción en sentido contrario al del campo magnéti-
co, en este caso se recibe energía eléctrica desde el sistema
al que se conecta y desde el medio motriz energía mecánica , la
velocidad del rotor comprende teóricamente entre:
- co < wr < 0
o su deslizamiento s: 0 < s < 1
El funcionamiento como generador de la máquina, se da
cuando se lleva la velocidad del rotor por encima de la veloci-
dad sincrónica, por medio motriz externo, teniendo en cuenta
que el estator está conectado a un sistema polifásico, puesto
que se puede tener operando independiente de la conexión a un
sistema externo. Como generador, la energía mecánica aplicada
al eje del rotor se convierte en energía eléctrica que es
entregada al sistema eléctrico. La condición para el funciona-
miento como generador es:
ws < wr < oo
o su deslizamiento s: - °o < s < 0
1.1.1 Ecuaciones Generales.
1.1.1.1 Voltajes y Corrientes en el Estator.
Cuando está el estator de la máquina de inducción conectado
a un sistema polifásico de voltaje terminal Vt por fase y
frecuencia f, el flujo principal giratorio induce una f.e.m. en
los devanados del estator y rotor.
A rotor.bloqueado las f.e.m. están dadas por las siguientes
ecuaciones generales :
Es = 4.44 f Ns Kdevs $ [V] (1.5)
Er = 4.44 f Nr Kdevr $ [V]
donde:
Es, Er : valor eficaz de los voltajes inducidos por
fase en los devanados del estator y rotor.
Ns, Nr : número de espiras por fase en el estator y
rotor.
Kdevs, Kdevr : factores de bobinado del estator y rotor.
$ : flujo principal por polo [Mx]
Generalmente se considera que el flujo principal $m gira a
una velocidad n respecto al rotor inmóvil, donde:
n = ws - wr (1.6)
por lo que la frecuencia en el devanado rotórico es:
P nf r = — x — (1.7)
2 60
reemplazando las ecuaciones (1.3) , (1.4) , (1.6) en (1.7) se
obtiene:
fr = s.f (1.8)
La f.e.m. en los devanados del rotor , incluyendo su rota-
ción queda de la siguiente forma:
Esr = 4.44 s f Nr Kdevr $ [V] (1.9)
Esr = s Er [V]
Por tanto tenemos, que la f.e.m. inducida en rotación Esr es
igual a (s) veces la f.e.m. inducida en el rotor inmóvil Er.
Las corrientes Is e Ir que circulan por el estator y rotor
producen flujos de dispersión que inducen f.e.m. dadas en forma
fasorial por:
Els = j Is Xls
Elr - o Ir Xlrs (1.10)
donde:
Els, Elr : f.e.m. de dispersión por fase del estator y rotor
Is, Ir : corriente por fase del estator y rotor
Xls, Xlrs : reactancia de dispersión por fase del estator y
rotor en movimiento.
a su vez tenemos:
Xls = 2 TC f Ls
Xlrs = 2 TC fr Lr (1.11)
Xlrs = s Xlr
donde:
Ls, Lr: inductancias de dispersión por fase del estator y
rotor.
Xlr : reactancia de dispersión por fase del rotor inmóvil.
Al tomar en cuenta la caida de tensión de la resistencia
óhmica y el flujo de dispersión de cada devanado, las ecuacio-
nes de equilibrio de voltaje escritas en forma fasorial comple-
ja para cada devanado son:
Vt - Es + Is (rs + jxls)
0 = Ers - Ir (rr + jxlrs) (1.12)
donde: rs, rr son las resistencias por fase del estator y
rotor.
en función de los parámetros a rotor inmóvil se tiene:
0 = Er - Ir ( rr / s 4- j xlr) (1.13)
1.1.1.2 Circuito Equivalente.
La determinación del circuito equivalente de la máquina de
inducción por fase consiste en sustituir idealmente el circuito
rotórico por otro, cuyo número de fases, espiras por fase y
factor de devanado sean iguales a los del circuito del estator.
Se distinguen mediante apostrofes los parámetros del rotor
reducidos al estator.
Designamos por Kr y Ki los factores de reducción de las
tensiones y de las corrientes respectivamente. Así se tienen:
Es E'r 4.44 f Ns Kdevs $ Ns Kdevs
Er Er 4.44 f Nr Kdevr $ Nr Kdevr
E'r = Ke Er = Es
Expresando que la f.m.m. del rotor reducido F'r se conserva
igual a la del original Fr para así determinar la misma f.m.m.
resultante, se tiene:
.45 qr Kdevr Nr Ir / p = .45 qs Kdevs Ns I'r / p
de donde Ki resulta ser:
Ir qs Kdevs Ns IrKi = = : I'r = — (1.15)
I'r qr Kdevr Nr Ki
donde: qs, qr son los números de fase del estator y rotor.
La reducción de la resistencia y reactancia de dispersión
del rotor, se obtiene observando que son cocientes de caídas de
tensión para corrientes, por lo tanto:
r'r = Ke Ki rr (1.16)
X'lr = Ke Ki Xlr (1.17)
Aplicando las ecuaciones de reducción a la ecuación (1.13)
de equilibrio de voltajes del circuito rotórico, se tiene:
r'r 1 - s= r'r + r'r (1.18)
s s
por lo que:
1 - 8
E'r = I'r (r'r + r'r + j X'lr)s
(1.19)
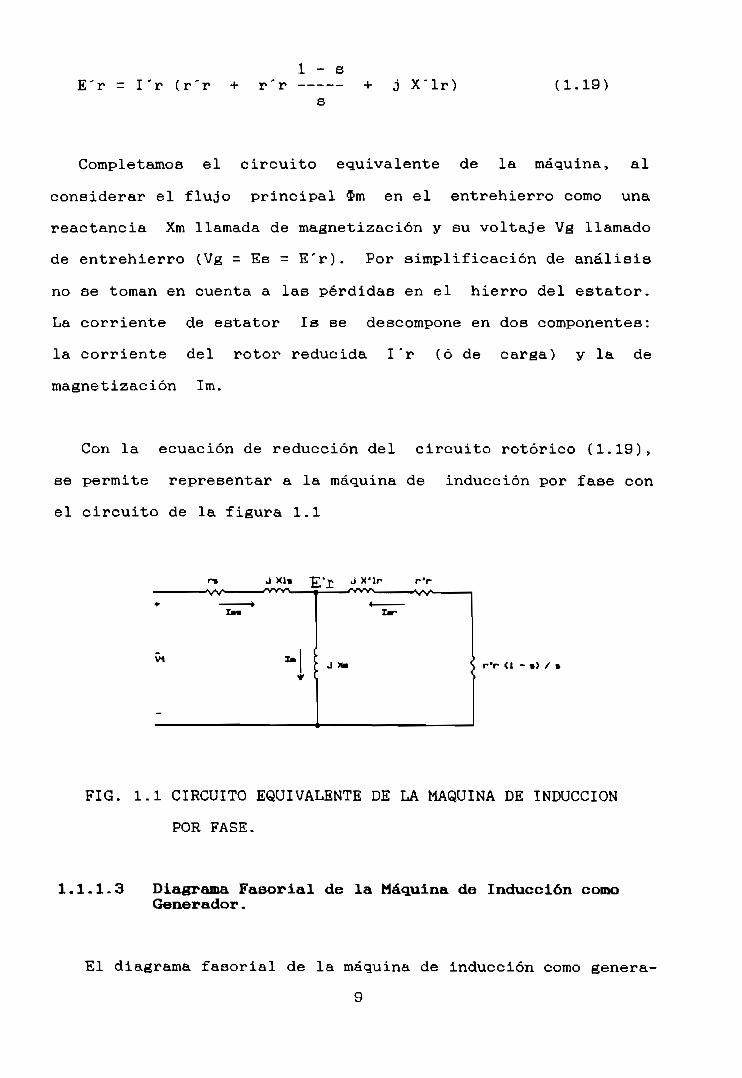
Completamos el circuito equivalente de la máquina, al
considerar el flujo principal $m en el entrehierro como una
reactancia Xm llamada de magnetización y su voltaje Vg llamado
de entrehierro (Vg = Es = E'r). Por simplificación de análisis
no se toman en cuenta a las pérdidas en el hierro del estator.
La corriente de estator Is se descompone en dos componentes:
la corriente del rotor reducida I'r (ó de carga) y la de
magnetización Im.
Con la ecuación de reducción del circuito rotórico (1.19),
se permite representar a la máquina de inducción por fase con
el circuito de la figura 1.1
J xu J XMr r'r
S r'r U -
FIG. 1.1 CIRCUITO EQUIVALENTE DE LA MAQUINA DE INDUCCIÓN
POR FASE.
1.1.1.3 Diagrama Fasorial de la Máquina de Inducción comoGenerador.
El diagrama fasorial de la máquina de inducción como genera-
9
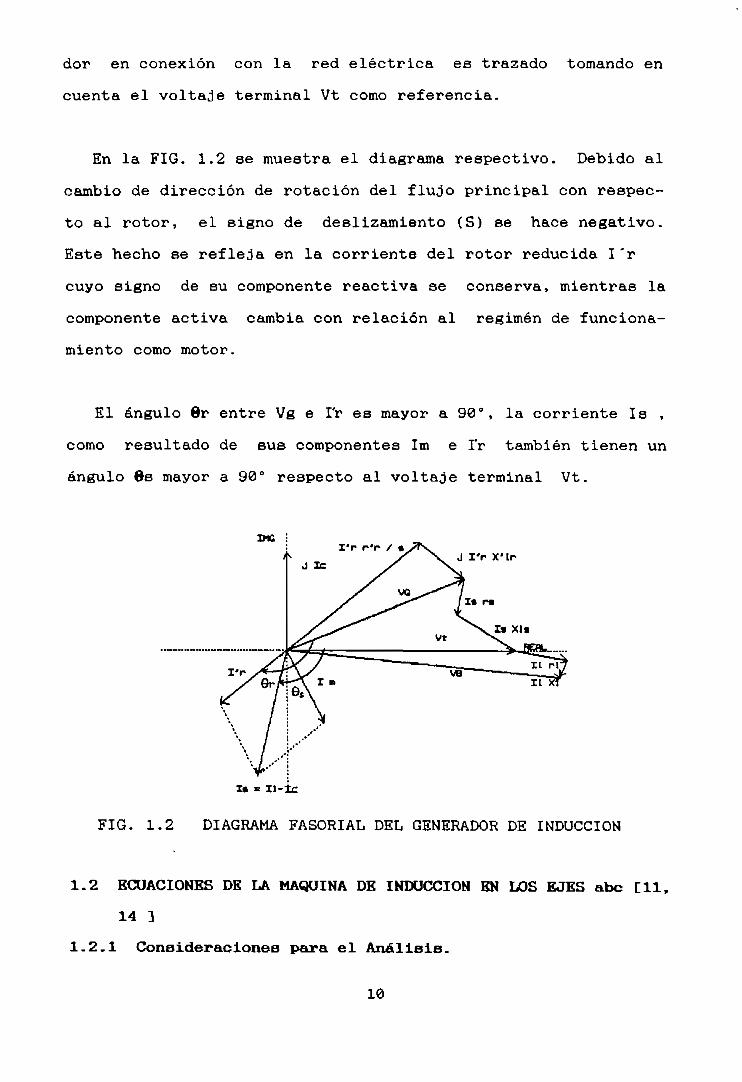
dor en conexión con la red eléctrica es trazado tomando en
cuenta el voltaje terminal Vt como referencia.
En la FIG. 1.2 se muestra el diagrama respectivo. Debido al
cambio de dirección de rotación del flujo principal con respec-
to al rotor, el signo de deslizamiento (S) se hace negativo.
Este hecho se refleja en la corriente del rotor reducida I'r
cuyo signo de su componente reactiva se conserva, mientras la
componente activa cambia con relación al régimen de funciona-
miento como motor.
El ángulo 6r entre Vg e I'r es mayor a 90°, la corriente Is ,
como resultado de sus componentes Im e I'r también tienen un
ángulo Os mayor a 90° respecto al voltaje terminal Vt.
IMG •J I'r XMr
Im = XI-±c
FIG. 1.2 DIAGRAMA FASORIAL DEL GENERADOR DE INDUCCIÓN
1.2 ECUACIONES DE LA MAQUINA DE INDUCCIÓN EN LOS EJES abe [11,
14 ]
1.2.1 Consideraciones para el Análisis.
10
Con el objeto de tener un modelo matemático que responda al
comportamiento adecuado de la máquina, se considera a esta
constituida por un sistema trifásico de bobinados uno en el
estator y otro en el rotor.
Se iniciará el análisis, considerando una máquina trifásica
ideal que cumpla con las siguientes características.
1.- Se considera una máquina trifásica con devanados estatori-
cos simétricos, de tal manera que las autoinductancias del
estator Ls, sean de igual valor y constantes, asi como las
autoinductancias del rotor Lr. Además dichos devanados están
uniformemente distribuidos en el estator y rotor de tal manera
que la onda espacial de fuerza magnetomotriz sea completamente
sinusoidal.
2.- Las inductancias mutuas entre bobinados del estator son de
igual valor y constantes al igual que las inductancias mutuas
rotóricas. Las inductancias mutuas entre bobinados estatóricos
y rotóricos variarán en función del ángulo que forman sus ejes
magnéticos respectivos.
3.- Se considera un entrehierro completamente uniforme, para
garantizar que las f.m.m. y densidad de flujo sean completa-
mente sinusoidales y sin contenido armónico.
4.- Se desprecia la variación de las resistencias con la tem-
peratura.
11
1.2.2 Ecuaciones de Voltaje.
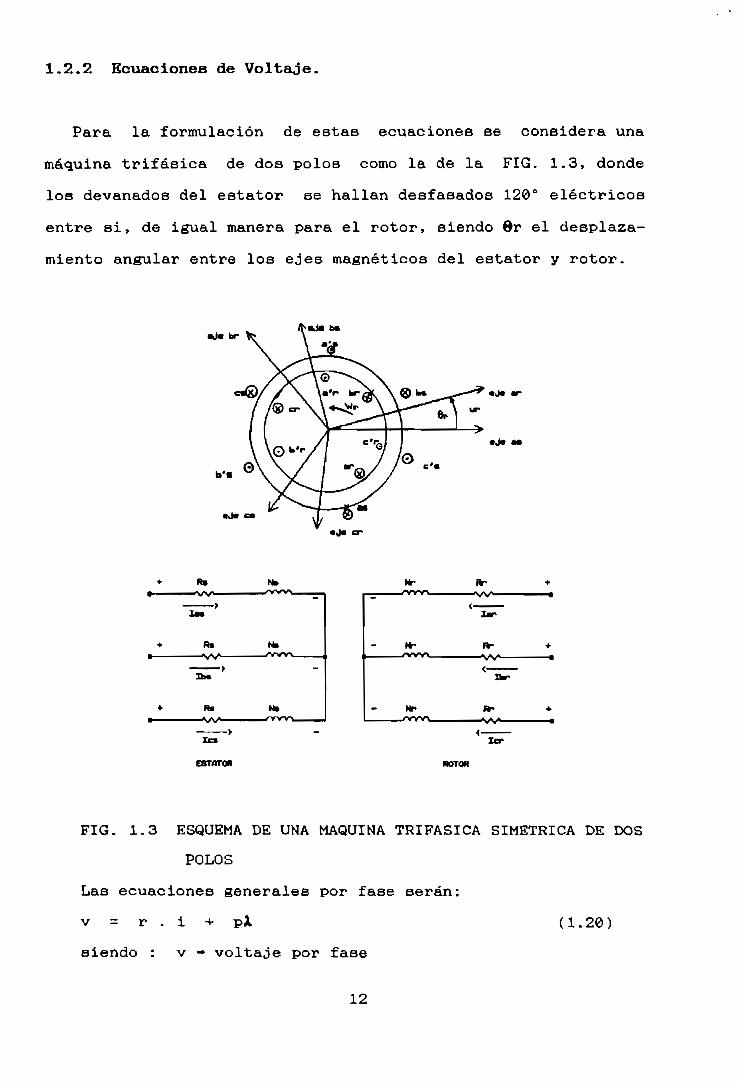
Para la formulación de cetas ecuaciones se considera una
méquina trifásica de dos polos como la de la FIG. 1.3, donde
los devanados del estator se hallan desfasados 120° eléctricos
entre si, de igual manera para el rotor, siendo 9r el desplaza-
miento angular entre los ejes magnéticos del estator y rotor.
•J* br
mjm c*
•J* «r
•J* *•
R»»W*-
IM
Ib»
X»
N»
H»
N»
Br
-vV^
Tur-
Icr
ROTOR
FIG. 1.3 ESQUEMA DE UNA MAQUINA TRIFÁSICA SIMÉTRICA DE DOS
POLOS
Las ecuaciones generales por fase serán:
v = r . i + pA (1.20)
siendo : v •* voltaje por fase
12
r •* resistencia total por fase
i -* corriente por fase
p •* operador d / dt
X •* concatenaciones de flujo totales por bobina
En forma matricial los voltajes de fase-neutro, tanto para
estator como para rotor serán:
[Vabca]
[Vabcr]
donde:
[Vabc«] =
Ciabc»] =
[rs] ¡ [0]
C0] ¡Crr]
[iabc.]
[iabcrO
[Xabca]
[XabcrO
(1.21)
VasVbsVes
iasibsics
A asXbsXcs
[Vabc^] =VarVbrVer
iaribricr
¿arAbrXcr
(1.22)
Los subíndices (s y r) se usan para denotar las variables
del estator y rotor respectivamente, además todas las magni-
tudes rotóricas son referidas al estator mediante las relacio-
nes de transformación correspondientes.
Las concatenaciones de flujo responden a la ecuación
X = L . i, que expresada en forma fasorial queda:
13
Xabcc
A. abe 3
donde :
[La]
[Lar] ! [Lr]
Lis + Lms00
[iabca]
0Lis + Lms
0
(1.23)
00
Lis + Lms
[Lr]Llr + Lmr
00
0Llr + Lmr
0
00
Llr + Lmr
[Lar] =
COS 8r* 008(8* + 2TC/3)COS(8r - 2TI/3) COS 8x»cos(8r + 2u/3) cos(8r - 2n/3)
COB(8r -
COS(8r + 2TC/3)
cos 8̂
(1.24)
Las Inductancias Ll« y Llr corresponden a las inductancias
de dispersión del estator y rotor respectivamente.
Lms» Lmr : inductancias de magnetización de estator y rotor.
Lsr : magnitud de acoplamiento mutuo entre los devana-
dos del estator y rotor.
8r : desplazamiento angular entre el eje del estator y
rotor,
1.2.3 Ecuaciones de la Máquina Referidas al Estator.
Se puede referir las ecuaciones del rotor al estator multi-
plicando por la relación de espiras.
14

] - CNr / Ns] [
[V'abcxO = CNs / Nrl
Cr ' r ] = CNs / Nr]2
(1.25)
Las ecuaciones de voltaje en variables abe en forma
matricial quedan :
p[L«] [labe»][Vabc*]
[V'abcrO
(1.26)
donde el superindice T indica la transpuesta de la matriz.
1.2.4 Ecuación del Torque Electromagnético.
La coenergía instantánea almacenada por el campo magnético
sera:
W = p / 2
donde:
[L] [i]
[iabcr]T
(1.27)
(1.28)
[L] = (1.29)
15

[i] = (1.30)
Por definición, el torque electromagnético en función de la
coenergía magnética estaré dado por la ecuación:
P dWTe - — .
2 d6r>(1.31)
siendo P el número de polos de la máquina.
Reemplazando la ecuación ( 1 . 27 ) en ( 1 . 31 ) se t iene la
siguiente expresión matricial para el torque electromagnético:
1 PTe = — . -- .
2 2
6L.[i] (1.32)
El desarrollo de esta última expresión, produce una ecuación
muy complicada debido a las funciones sinusoidales que aparecen
en las inductancias mutuas entre estator y rotor, por tanto se
reducirá la complejidad de las ecuaciones de voltaje y torque
hasta este punto desarrolladas.
1.3 TRANSFORMACIÓN DE LAS ECUACIONES DE LA MAQUINA A UN
SISTEMA DE EJES ARBITRARIOS DE REFERENCIA q, d, o.
[11, 16]
Debido a las inductancias mutuas entre fases del estator y
rotor que varían como función sinusoidal de la posición relati-
va entre ejes magnéticos estatórico y rotórico, existe la
dificultad para resolver las ecuaciones de voltaje y torque
electromagnético en ejes abe.
16
Por esta razón se usa un sistema de ejes arbitrarios de
referencia para eliminar este problema. Por este método todas
las variables del estator y rotor se refieren a un sistema de
referencia que gira a una velocidad angular arbitraria w, en
tanto que los ejes del estator están fijos y los del rotor
giran a una velocidad wr.
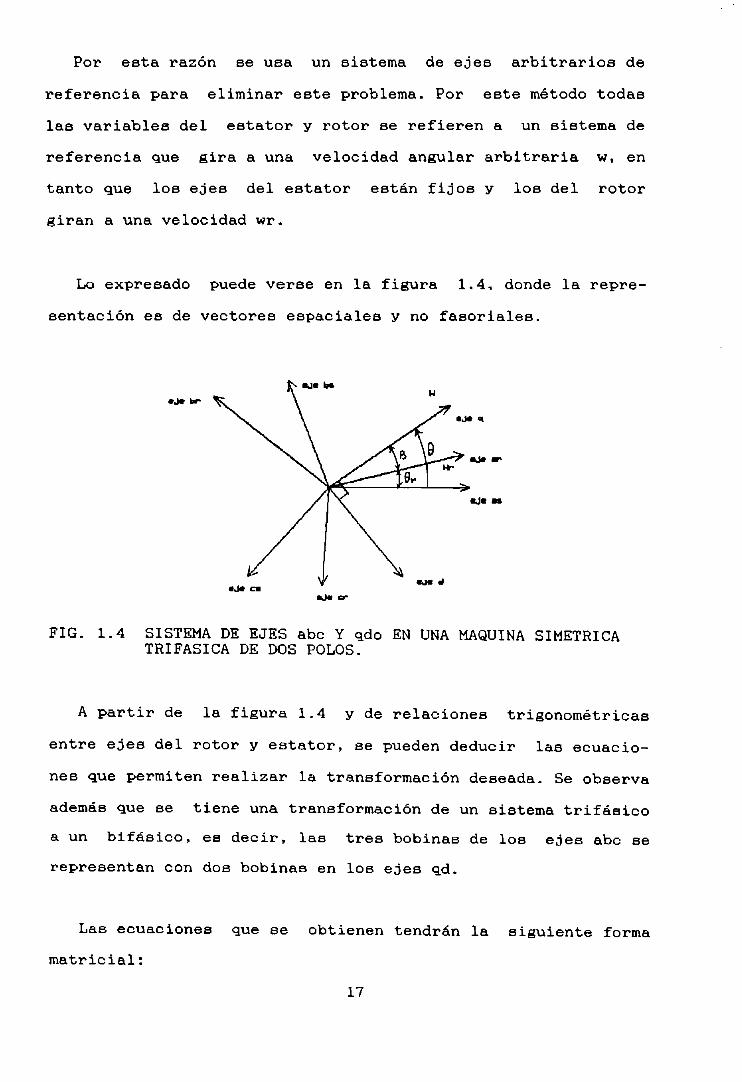
Lo expresado puede verse en la figura 1.4, donde la repre-
sentación es de vectores espaciales y no fasoriales.
• J» br
•J* M
mjm cm
FIG. 1.4 SISTEMA DE EJES abe Y qdo EN UNA MAQUINA SIMÉTRICATRIFÁSICA DE DOS POLOS.
A partir de la figura 1.4 y de relaciones trigonométricas
entre ejes del rotor y estator, se pueden deducir las ecuacio-
nes que permiten realizar la transformación deseada. Se observa
además que se tiene una transformación de un sistema trifásico
a un bifásico, es decir, las tres bobinas de los ejes abe se
representan con dos bobinas en los ejes qd.
Las ecuaciones que se obtienen tendrán la siguiente forma
matricial:
17
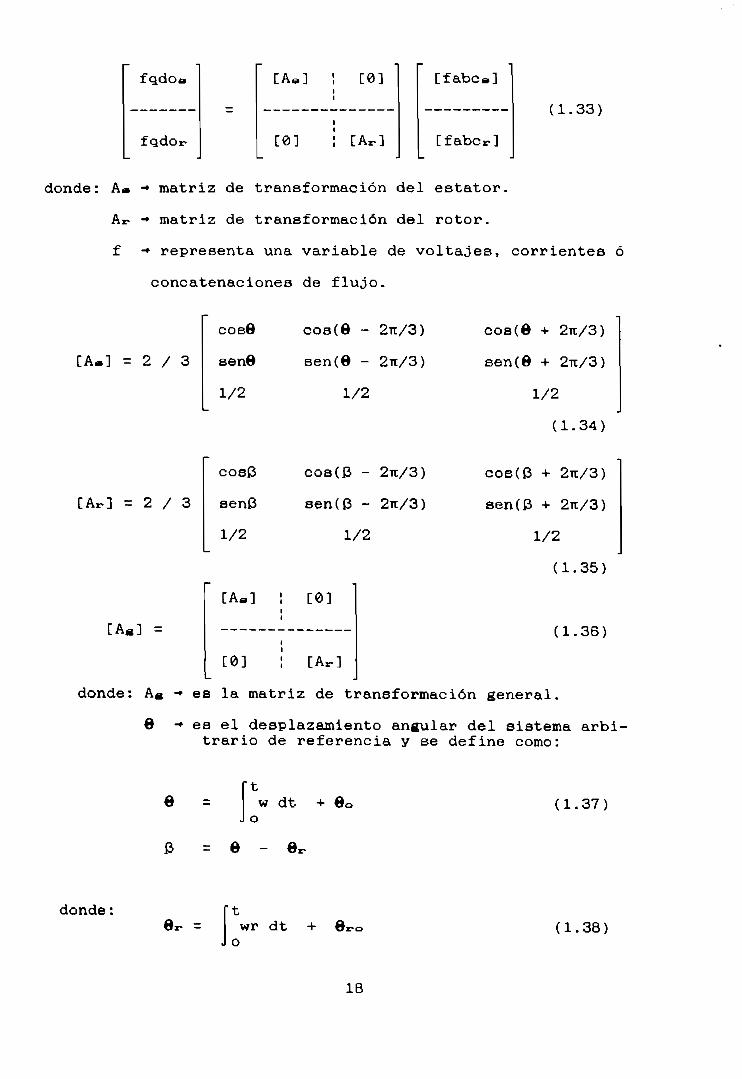
fqdOí
fqdOí C0] CA.O
[fabc«]
[fabo*]
(1.33)
donde: A» •* matriz de transformación del estator.
Ar •* matriz de transformación del rotor,
f -* representa una variable de voltajes, corrientes ó
concatenaciones de flujo.
[A.] -2/3
[Ar] = 2 / 3
CA«] =
COSO COS(0 - 2TC/3)
senQ sen(6 - 2n/3)
1/2 1/2
cosíB cos(B - 2u/3)
sen0 sen(í3 -
1/2 1/2
CA-] [0]
C0]
cos(6 + 2it/3)
sen(6 + 2̂ /3)
1/2
(1.34)
cos(í3 + 2TC/3)
sen(í3 + 2TC/3)
1/2
(1.35)
(1.36)
donde: A« •* es la matriz de transformación general.
6 -* es el desplazamiento angular del sistema arbi-trario de referencia y se define como:
fte w dt + (1 - 37 )
= 8 - 6 ,
donde:wr dt + 6» (1.38)
18
En las matrices de transformación, se puede ver la presencia
de variables cero, las mismas que no están asociadas con el
sistema de ejes arbitrario de referencia, sin embargo están
relacionadas aritméticamente con las variables abe, indepen-
diente de 8 . Estas variables cero se introducen en la trans-
formación con el fin de hacer consistente la transformación,
apareciendo solamente cuando se produce funcionamiento desba-
lanceado ó asimétrico, pero sin influir en los demás ejes.
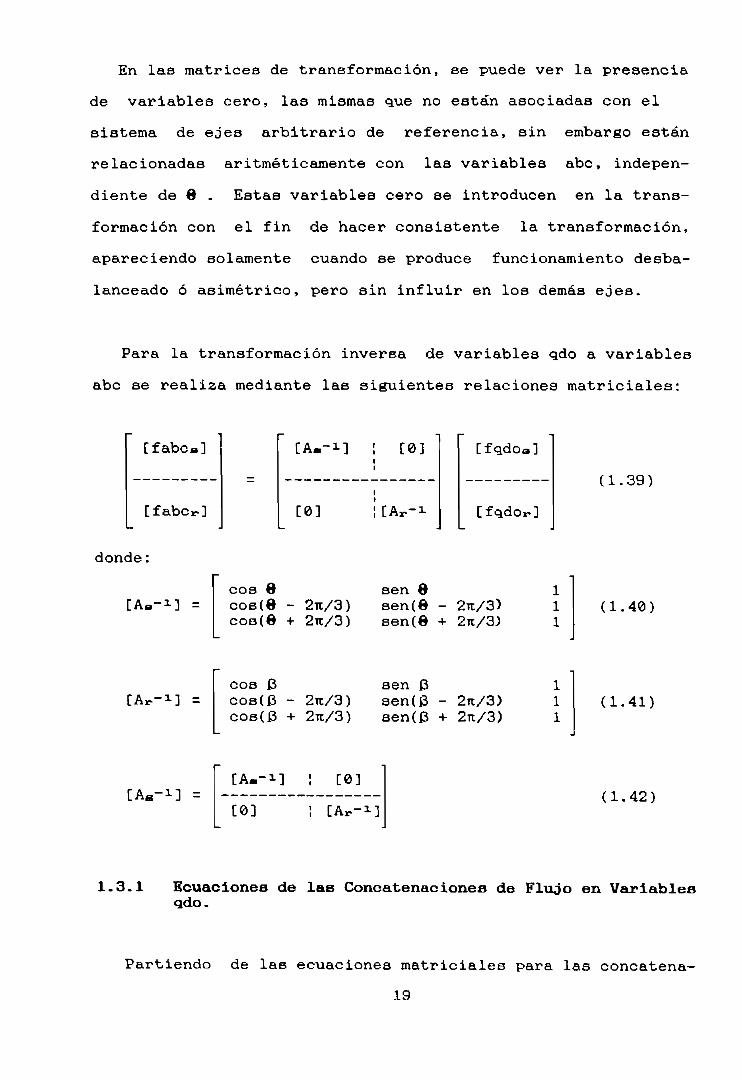
Para la transformación inversa de variables qdo a variables
abe se realiza mediante las siguientes relaciones matriciales:
[fabca]
[fabcr]
[A«-i] ! [0]i
i
[0] ¡CAr-i
CfqdOo]
[fqdOr]
donde:
eos 8cos(8 - 2u/3)cos(8 + 2ir/3)
eos Í3cos(0cos(í3 2it/3)
[01
[0]
sen 8sen (8 - 2tt/3>sen(8 + 2rc/3)
sen 0sen (13 - 2n/3)sen(0 +
111
(1.39)
(1.40)
(1.41)
(1.42)
1.3.1 Ecuaciones de las Concatenaciones de Flujo en Variablesqdo.
Partiendo de las ecuaciones matriciales para las concatena-
19
clones de flujo en variables abe ec. (1.23) y teniendo en
cuenta las ecuaciones (1.24), se puede realizar la transforma-
ción al sistema qdo utilizando las respectivas ecuaciones de
transformación.
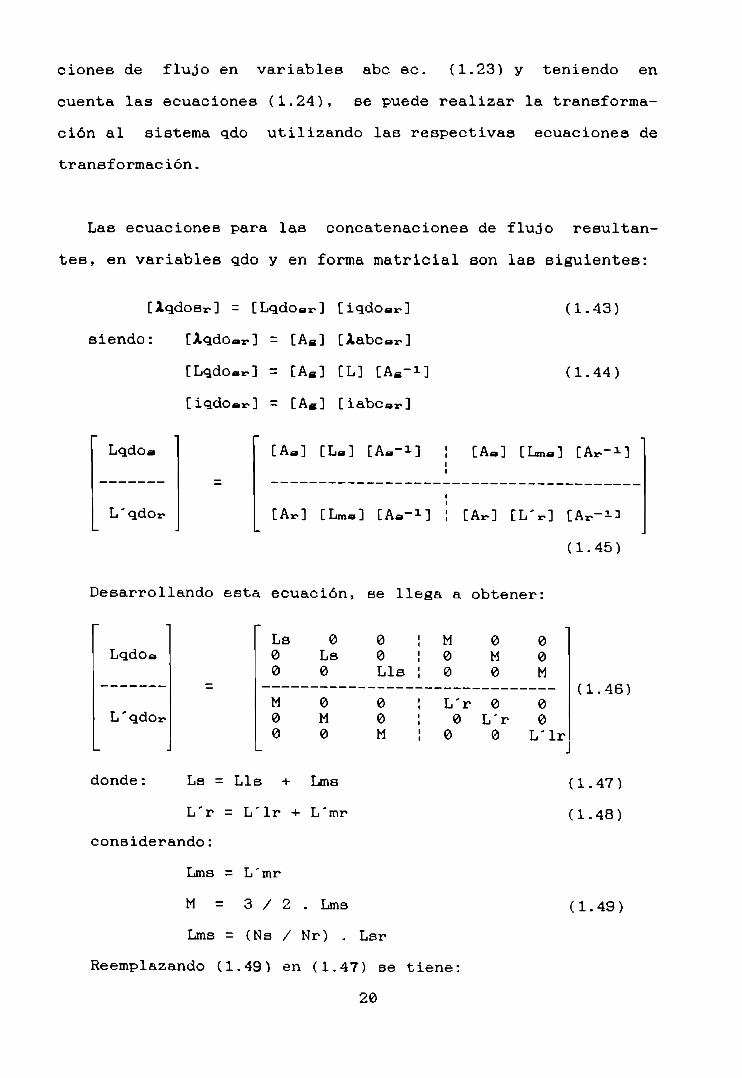
Las ecuaciones para las concatenaciones de flujo resultan-
tes, en variables qdo y en forma matricial son las siguientes:
siendo:
= [LqdOar]
[iqdo«0 = [Aa] [Aabc«r]
[Lqdo«] = [A«] [L] [A«-
rO = [Aa]
(1.43)
(1.44)
Lqdoi
L *qdor-
CA«] [La] [A.-1]
CAr] [Lma]
[A.]
[Ar]
(1.45)
Desarrollando esta ecuación, se llega a obtener:
LqdOa
L'qdOr-
donde : Ls = Ll
L'r = L
Ls00
M0
0
3 +
'Ir +
0
Ls0
0
M0
Lms
L'mr
00
Lis
00
M
M0
0
L'r00
0
M0
0L'r0
00M
0
0
L'lr
/ 1 >i c \ 1.4b)
( 1 . 47 )
(1-48)
considerando:
Lms = L'mr
M = 3 / 2 . Lms
Lms = (Ns / Nr) . Lsr
Reemplazando (1.49) en (1.47) se tiene:
20
(1.49)
Ls - Lis + M
L'r = I/Ir + M (1.50)
De esta manera se ha logrado eliminar la dependencia de las
inductancias mutuas entre estator y rotor, de la posición del
rotor y por lo tanto del tiempo.
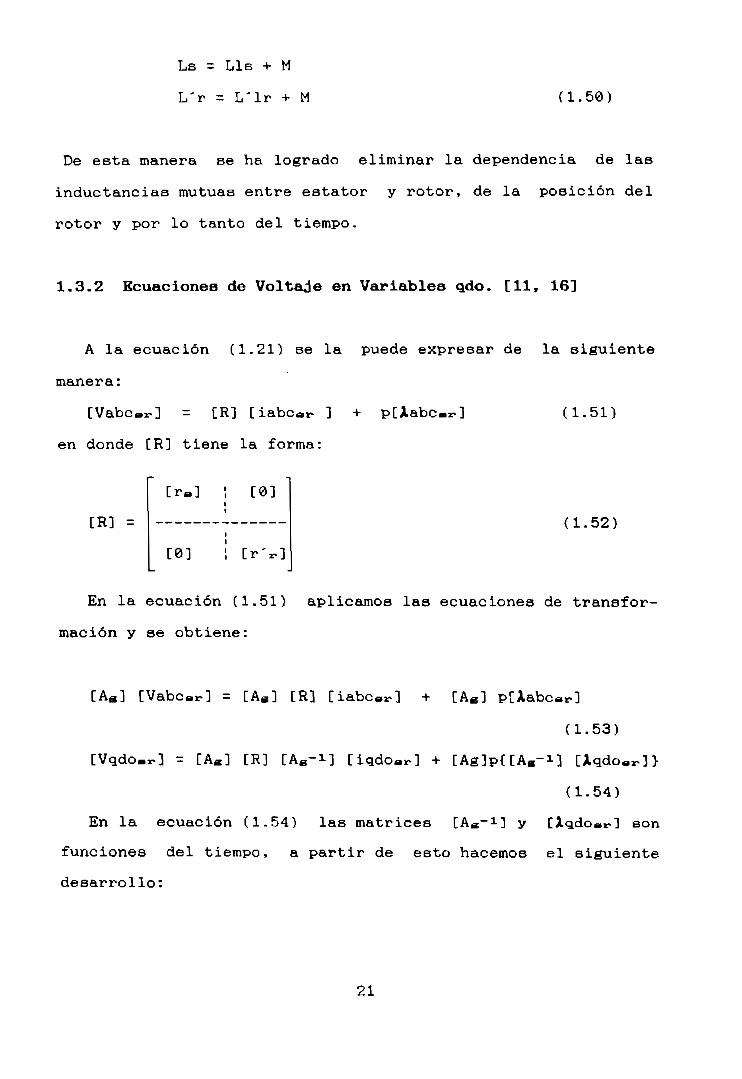
1.3.2 Ecuaciones de Voltaje en Variables qdo. [11, 16]
A la ecuación (1.21) se la puede expresar de la siguiente
manera:
[Vabc«0 = [R] [iabcar- ] + p[Jlabc«0 (1.51)
en donde [R] tiene la forma:
CR] =
[0]
C0]
(1.52)
En la ecuación (1.51) aplicamos las ecuaciones de transfor
mación y se obtiene:
[Aa] [R] [iabc«O + [Afi] pü
(1.53)
r] = [A«] [R] [Ag-i]
(1-54)
En la ecuación ( 1 . 54) las matrices CAa"1] y [Xqdo»*-] son
funciones del tiempo, a partir de esto hacemos el siguiente
desarrollo:
21
[A
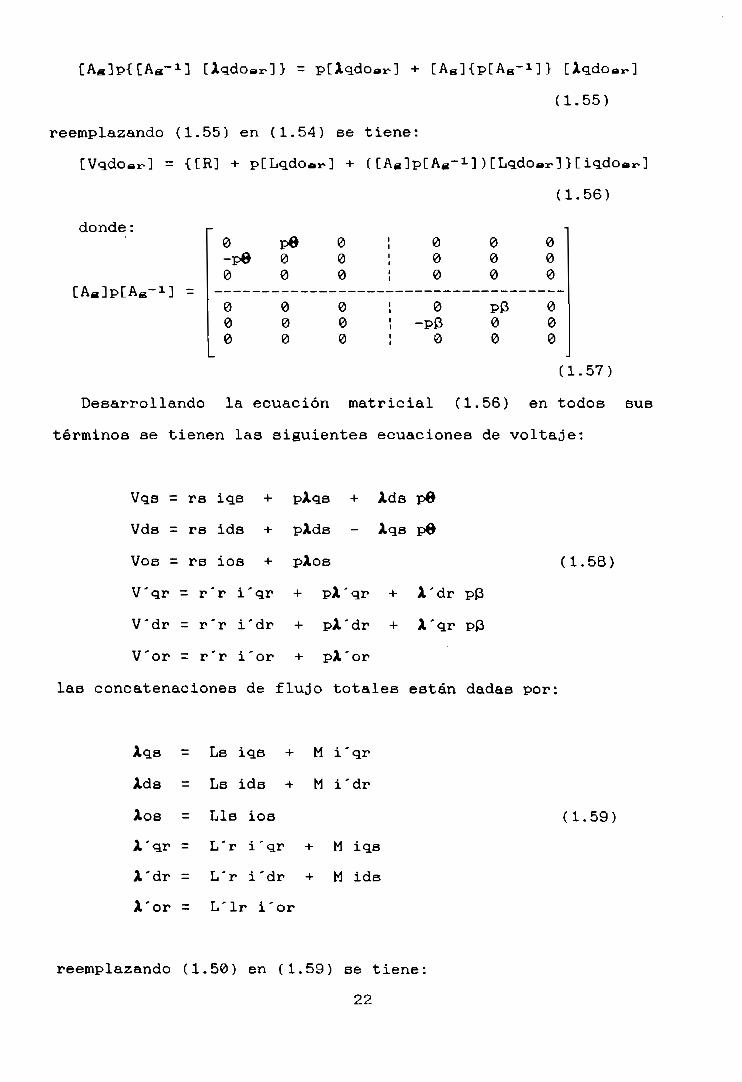
reemplazando (1.55) en (1.54) se tiene:
donde
(1.55)
*] + p[Lqdo«0 + ([A«]p[A«-i
0-pe0
0
00
pe00
00
0
0
0
0
0
0
0
0
0
0
0
-PB0
])[Lqd
000
PÍ300
o«r]}[iqd
(1.56)
00
0
00
0
(1.57)
Desarrollando la ecuación matricial (1.56) en todos sus
términos se tienen las siguientes ecuaciones de voltaje:
Vqs = rs iqs + pJLqs + JLds pe
Vds = rs ids + pXds - Aqs pe
Vos = rs ios + pAos
V * qr = r' r i' qr + pA' qr + jt' dr pí3
Vdr = r*ri*dr + pA'dr + Jt'qr pí3
V'or = r'r i'or + pJl'or
las concatenaciones de flujo totales están dadas por:
(1.58)
Xqs = Ls iqs + M i'qr
Ada = Ls ids + M i'dr
JLos = Lis ios
A'qr= L'ri'qr + M iqs
A'dr = L-r i'dr + M ids
Jt'or = L'lr i'or
(1.59)
reemplazando (1.50) en (1.59 ) se tiene:
22
JLqs = Lis iqs + M(iqs + i'qr)
Xds = Lis ids + M(ids + i'dr)
JLos = Lis ios
JL'qr = L'qr i'qr + M(iqs + i'qr)
I'dr = L'lr i'dr + Míids + i'dr)
A'or = L'lr i'or (1.60)
Las ecuaciones (1.58) y (1.60) representan las ecuaciones
generales de la máquina de inducción.
1.3.3 Ecuaciones del Torque Electromagnético. [11]
Al realizar la transformación de la ecuación del torque
electromagnético (1.32), se obtiene la siguiente expresión para
el torque electromagnético en función de variables qdo.
Te = (n / 2) (P / 2) M (iqs.i'dr - ida.i'qr) (1.61)
En función de las concatenaciones de flujo se tiene:
Te = (n / 2) . (P / 2) . (A'qr i'dr - Jl'dr i'qr) (1.62)
donde: n •* es el número de fases.
P -̂ es el número de polos.
1.3.4 Ecuación del Torque Electromecánico.
El comportamiento electromecánico del generador de inducción
está definido por la siguiente ecuación:
23
Te + Tm = (Jp + D) wr (1-63)
donde :
J -*• momento de inercia de la máquina
D •* coeficiente angular de fricción viscosa.
Jpwr -* torque de aceleración.
Dwr •* torque de amortiguamiento mecánico
Tm -* torque mecánico de entrada.
Te -* torque electromagnético.
Para el caso del generador de inducción, Tm tiene signo
positivo y Te es de signo negativo.
1,3.5 Representación del Sistema en Variables de Estado.
Las ecuaciones obtenidas se representarán en variables de
estado con el objeto de simplicar la solución matemática del
sistema de ecuaciones diferenciales que rigen el comportamiento
de la máquina trifásica de inducción.
A las ecuaciones (1.59) se les multiplica por la velocidad
angular eléctrica we, las ecuaciones obtenidas son:
= Xls iqs + Xm ( iqs + i'qr)
fds = Xls ids + Xm ( ids + i'dr)
fos = Xls ios (1.64)
fqr = X'lr i'qr + Xm (iqs + i'qr)
fdr = X'lr i'dr + Xm (ids + i'dr)
f or = X'lr i'or
donde :
f •* representa concatenación de flujo por segundo
24

X •* es una reactancia.
además f = we JL
Xm - we M
Xls = we Lis
X'lr - we L'lr (1.65)
El flujo de magnetización por segundo tanto para el estator
como para el rotor, viene dado por las siguientes ecuaciones.
fmq = Xm ( iqs + i'qr)
fmd = Xm (ids + i'dr) (1.66)
Reemplazando (1.66) en (1.64) se tiene:
fqs = Xls iqs + fmq
fds = Xls ids + fmd
fos = Xls ios (1.67)
f'qr = X'lr i'qr + fmq
f'dr = X'lr i'dr + fmd
f'or = X'lr i'or
Despejando las corrientes en función de las concatenaciones
de flujo por segundo, se tiene:
iqs = (fqs - fmq) / Xls
ids = (fds - fmd) / Xls
ios = fos / Xls (1.68)
i'qr = (f'qr - fmq) /X'lr
i'dr = (f'dr - fmd) / X'lr
i'or = f'or / X'lr
25
Con el fin de eliminar las corrientes de las ecuaciones del
flujo de magnetización por segundo (1.66), se reemplazan las
ecuaciones (1.68) en las ecuaciones mencionadas, obteniendo:
fmq = Xmq (fqs/ Xls + f'qr / X'lr)
= Xmd (»ds/ Xls + f dr / X'lr) (1.69)
donde:
Xmq = Xmd = (1 / Xm + 1 / Xls + I/ X'
(1.70)
Siguiendo un procedimiento similar con las ecuaciones de
voltaje (1.58), esto es multiplicando ambos miembros de las
ecuaciones por we y reemplazando p8 por W y pO por W - Wr
se obtienen las ecuaciones siguientes.
we Vqs = we rs iqs -*- pfqs + w fds
we Vds = we rs ids + pfds - w fqs
we Vos = we rs ios + pfos
we V'qr = we r'r i'qr + pfqr + (w - wr) f'dr
we V'dr = we r'r i'dr + pfdr - (w - wr) ̂ 'qr
we V'or = we r'r i'or + pf or
(1.71)
Para el presente estudio consideramos al sistema de referen-
cia de ejes qdo fijo en el estator, por tanto W = 0 , por otro
lado el voltaje aplicado en el rotor será igual a cero, obte-
niendo el siguiente grupo de ecuaciones al despejar las deriva-
26

das de los flujos con respecto al tiempo en ec. (1.71)
= we Vqs + we rs fmq / Xls - we rs fqs / Xls
pfds = we Vds + we rs fmd / Xls ~ we rs tds / *le
pfos = we Voa - we rs fos / Xls
pf qr = wr f'dr + we r'r fmq / X'lr - we r'r fqr / X'lr
pf dr = wr f* qr -f we r'r fmd / X'lr - we r'r f* dr / X'lr
pf or = -we r'r ̂ os /X'lr
(1.72)
La ecuación del torque electromagnético (1.61), puede
escribirse en función de las concatenaciones de flujo por
segundo, multiplicándola por we / we.
Te = (n / 2) . (P / 2) . (f'qr i'dr - f'dr i'qr) / we
(1.73)
Como se puede ver, todas las ecuaciones se hallan expresa-
das, directa o indirectamente, en función de las concatenacio-
nes de flujo por segundo que constituyen las variables de
estado.
1.4 CIRCUITOS EQUIVALENTES DE LA MAQUINA DE INDUCCIÓN [13, 16]
1.4.1 Circuitos Equivalentes en Ejes qdo.
En el presente estudio se considera el sistema de referencia
fijo en el estator y los circuitos equivalentes qdo de una
máquina simétrica trifásica de inducción obtenidos apartir de
las ecuaciones (1.58) y (1.60) son los siguientes:
27

eje q
Ll» L'lr r'r
Ll»
eje d
L'lr r»
eje o
FIG. 1.5 CIRCUITOS EQUIVALENTES QDO DE UNA MAQUINA SIMÉTRICATRIFÁSICA CON REFERENCIA FIJA EN EL ESTATOR.
Los términos Xqs p8, Xds pO, i'qr p3, A'dr p£ representan
voltajes de velocidad debido a la rotación de los ejes.
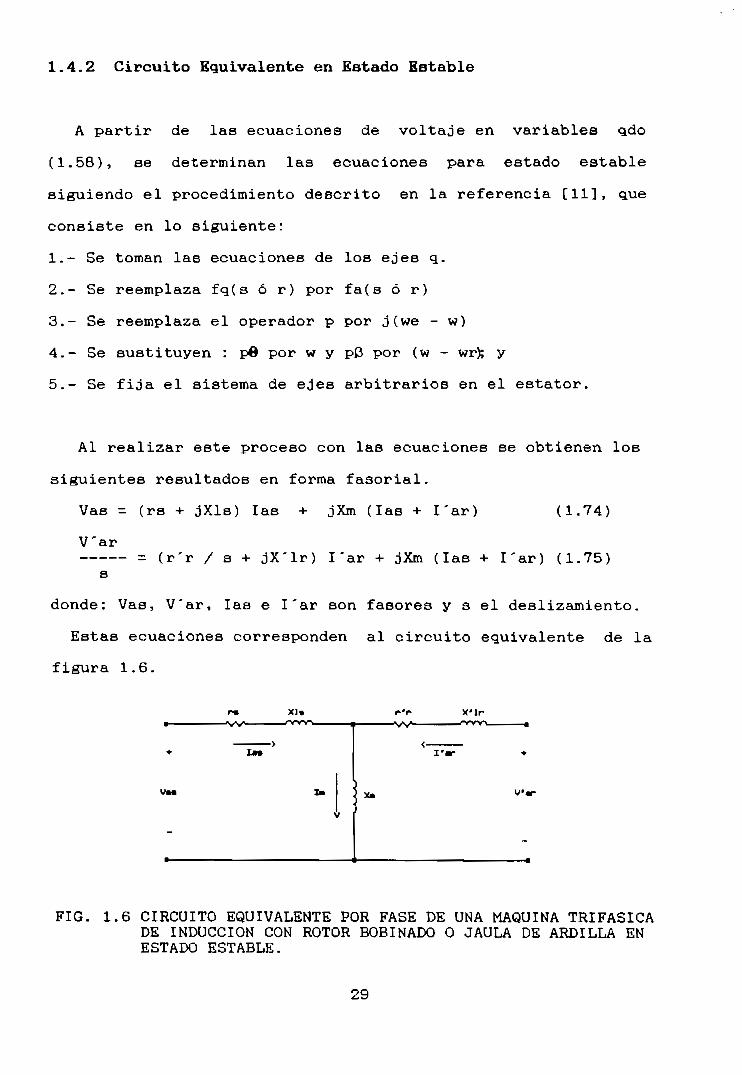
1.4.2 Circuito Equivalente en Estado Estable
A partir de las ecuaciones de voltaje en variables qdo
(1.58), se determinan las ecuaciones para estado estable
siguiendo el procedimiento descrito en la referencia [11], que
consiste en lo siguiente:
1.- Se toman las ecuaciones de los ejes q.
2.- Se reemplaza fq(s ó r) por fa(s ó r)
3.- Se reemplaza el operador p por j(we - w)
4.- Se sustituyen : p6 por w y p0 por (w - wr); y
5.- Se fija el sistema de ejes arbitrarios en el estator.
Al realizar este proceso con las ecuaciones se obtienen los
siguientes resultados en forma fasorial.
Vas - (rs + jXls) las + jXm (las + I'ar) (1.74)
V'ar= (r'r / s + jX'lr) I'ar + jXm (las + I'ar) (1.75)
s
donde: Vas, V'ar, las e I'ar son fasores y s el deslizamiento.
Estas ecuaciones corresponden al circuito equivalente de la
figura 1.6.
r» XI» r'r XMr
I*»
1 X«
V
FIG. 1.6 CIRCUITO EQUIVALENTE POR FASE DE UNA MAQUINA TRIFÁSICADE INDUCCIÓN CON ROTOR BOBINADO O JAULA DE ARDILLA ENESTADO ESTABLE.
29

1.5 CARACTERÍSTICAS DEL SISTEMA. [3, 4, 12]
1.5.1 El Generador de Inducción Acoplado a una Barra Infinita a
Través de una Linea de Transmisión.
La máquina de inducción operando como Generador acoplado a
una barra infinita, es manejada por una máquina motriz por
sobre la velocidad sincrónica, el deslizamiento es negativo y
la resistencia equivalente r'r / s del circuito del rotor es
negativa.
Aparece la denominación de Generador Acoplado a una Barra
Infinita, al ser la barra la que determina el voltaje terminal,
la frecuencia y proporciona la potencia reactiva.
Para el presente estudio, el generador de inducción funcio-
nará conectando sus terminales estatóricos a una barra infinita
a través de una linea de alimentación y de la misma forma se
estudia su comportamiento cuando se conecta un capacitor por
fase en sus terminales.
Un capacitor sin pérdidas y conectado a una red, se consi-
dera como un receptor de corriente en adelanto 90 grados
respecto a la tensión de la red ó como un generador de corrien-
te en atraso 90 grados respecto a la tensión de la red. De
esta forma se hace posible sustituir parcialmente el suministro
de corriente en atrazo que demanda el generador de inducción
para la excitación de su circuito magnético.
En la figura 1.7 se presenta un esquema general del funcio-
30
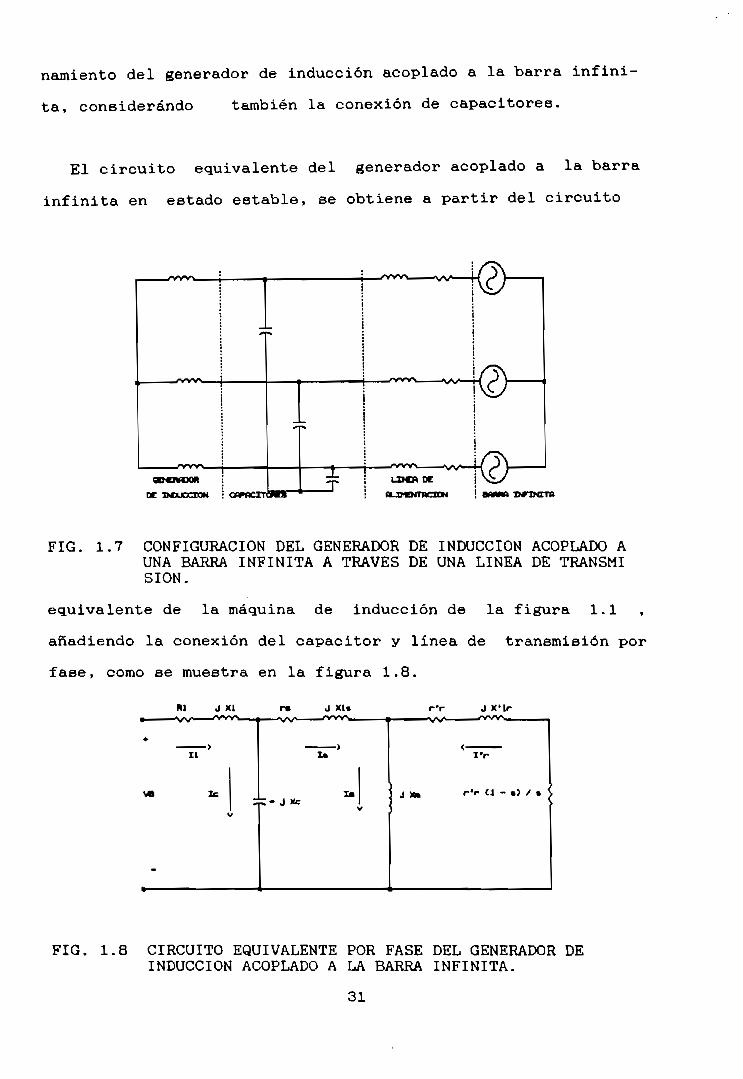
namiento del generador de inducción acoplado a la barra infini-
ta, considerando también la conexión de capacitores.
El circuito equivalente del generador acoplado a la barra
infinita en estado estable, se obtiene a partir del circuito
AAAX.
QOCIMXM
'%
*» ^
±
, TLDCB DC
FIG. 1.7 CONFIGURACIÓN DEL GENERADOR DE INDUCCIÓN ACOPLADO AUNA BARRA INFINITA A TRAVÉS DE UNA LINEA DE TRANSMISION.
equivalente de la máquina de inducción de la figura 1.1 ,
añadiendo la conexión del capacitor y linea de transmisión por
fase, como se muestra en la figura 1.8.
» V V • • • • • "^
+•̂ 111 >
11
VB Ic•<
V
-• II >I»
I"t- J Xc\
q- -IV
J Mi rV ti - » > / » <
FIG. 1.8 CIRCUITO EQUIVALENTE POR FASE DEL GENERADOR DEINDUCCIÓN ACOPLADO A LA BARRA INFINITA.
31
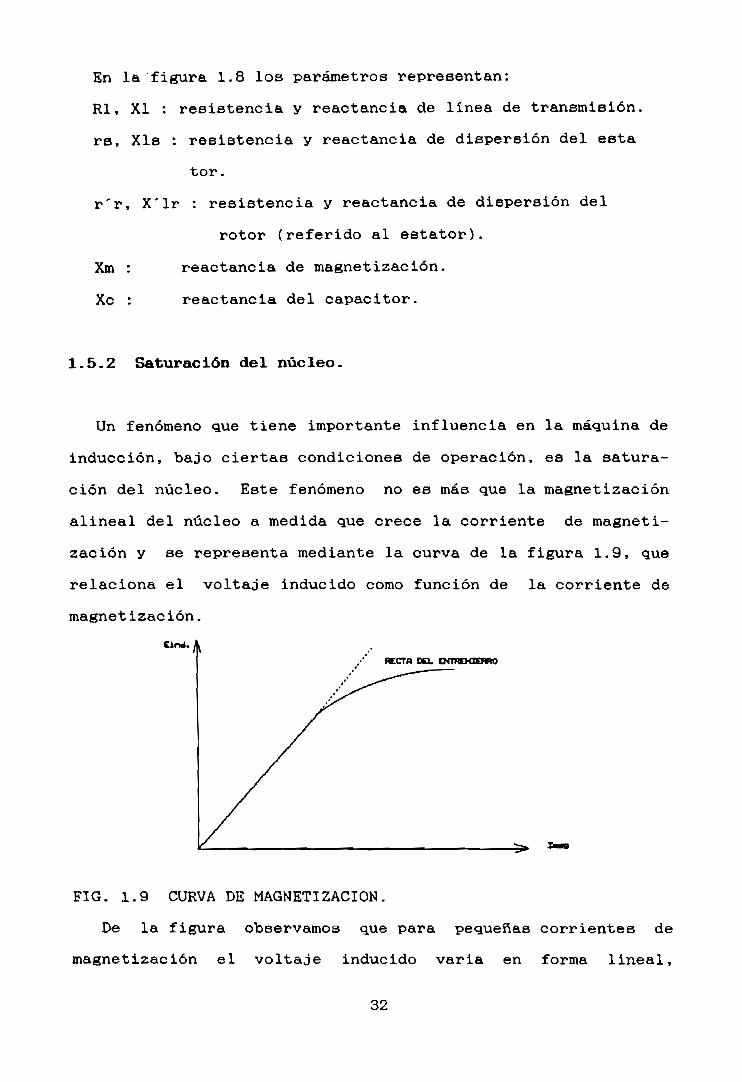
En la figura 1.8 los parámetros representan:
Rl, XI : resistencia y reactancia de línea de transmisión.
rs, Xls : resistencia y reactancia de dispersión del esta
tor,
r'r, X'lr : resistencia y reactancia de dispersión del
rotor (referido al estator).
Xm : reactancia de magnetización.
Xc : reactancia del capacitor.
1.5.2 Saturación del núcleo.
Un fenómeno que tiene importante influencia en la máquina de
inducción, bajo ciertas condiciones de operación, es la satura-
ción del núcleo. Este fenómeno no es más que la magnetización
alineal del núcleo a medida que crece la corriente de magneti-
zación y se representa mediante la curva de la figura 1.9, que
relaciona el voltaje inducido como función de la corriente de
magnetización.
Cinri.
RECTA DO. CNTRDOCRRO
FIG. 1.9 CURVA DE MAGNETIZACIÓN.
De la figura observamos que para pequeñas corrientes de
magnetización el voltaje inducido varia en forma lineal,
32
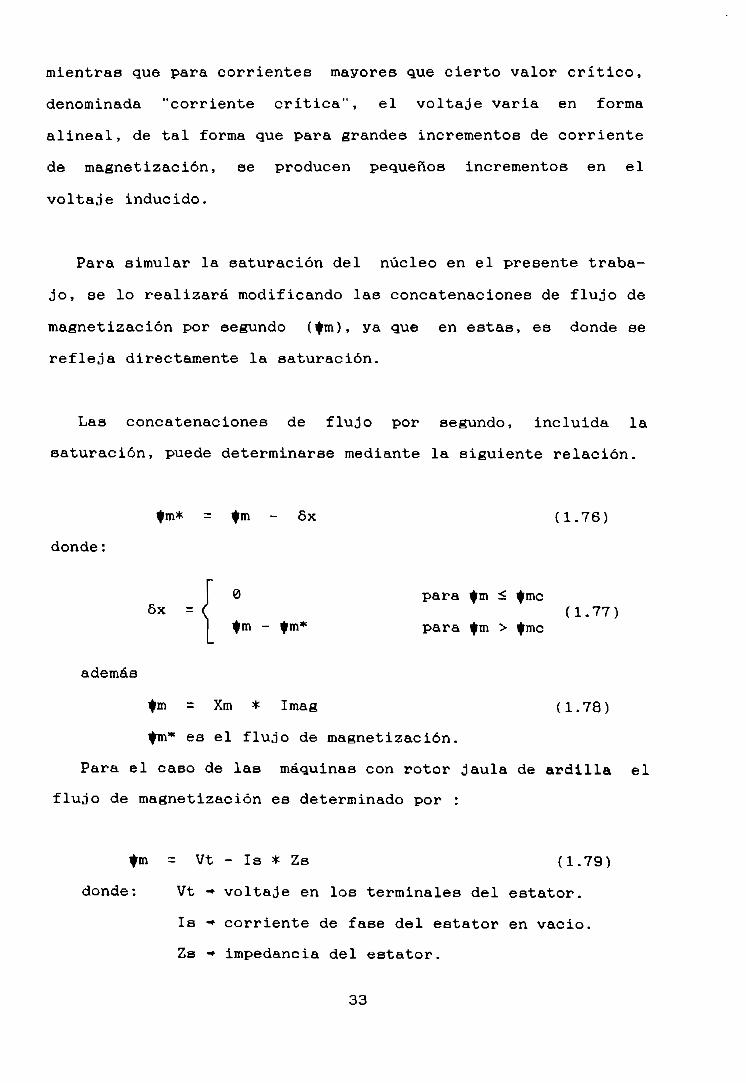
mientras que para corrientes mayores que cierto valor crítico,
denominada "corriente crítica", el voltaje varia en forma
alineal, de tal forma que para grandes incrementos de corriente
de magnetización, se producen pequeños incrementos en el
voltaje inducido.
Para simular la saturación del núcleo en el presente traba-
jo, se lo realizará modificando las concatenaciones de flujo de
magnetización por segundo (fin), ya que en estas, es donde se
refleja directamente la saturación.
Las concatenaciones de flujo por segundo, incluida la
saturación, puede determinarse mediante la siguiente relación.
fm* = fm - 6x (1.76)
donde :
0 para fm < fmc(1.77)
para fm > fmc
además
f m = Xm * Imag (1.78)
fm* es el flujo de magnetización.
Para el caso de las máquinas con rotor jaula de ardilla el
flujo de magnetización es determinado por :
fm ~ Vt - Is * Zs (1.79)
donde: Vt •* voltaje en los terminales del estator.
Is •* corriente de fase del estator en vacio.
Zs -* impedancia del estator.
33

Al incluir la saturación en las ecuaciones de la máquina, se
modifican las ecuaciones de las concatenaciones de flujo de
magnetización por segundo, de la siguiente manera.
Xmq= fmq - . Óx
Xm(1.80)
Xmdf*md = fmd - . óx
Xm
donde 6x esta dado por (1.77).
Cuando se desee incluir la saturación, bastará con utilizar
las ecuaciones (1.80) para determinar las concatenaciones de
flujo de magnetización por segundo, con lo que todas las demás
magnitudes se verán también afectadas por la saturación.
1.5.3 Voltajes y Corrientes del Sistema en Estado Estable.
De acuerdo al circuito equivalente de la figura 1.8, repre-
sentamos el estado estable de la máquina de inducción.
Resolviendo el circuito, se obtienen las corrientes en
variables abe del estator y rotor, que están representadas por:
Vaslas = (1.81)
2
ZmI'ar = - . las (1.82)
Zm + Zr
34
donde: Z = Zs + Zl
Zr * ZmZl -
Zr + Zm
Zs = rs + jXla ; Zr - rr/s + oXlr ; Zm = jXm
Las corrientes en variables abe en la línea de alimen-
tación trifásica y en el capacitor cuando esta presente son:
VBa - Vaslal = ó Tal = las + lac (1.B3)
Zl
Vaslac = (1.84)
Zc
donde: Zl = Rl + jXl
Zc = jXc
en aucencia de conexión de capacitor, se cumple:
lal = las (1.65)
en la barra infinita se cumple :
VBa = Vas + Zl . lal (1.86)
la corriente de magnetización Im esta expresada por:
ZrIm - - .I'r ; Im = las -*- I'ar (1.87)
Zm
el deslizamiento s tiene la forma:
s = 1 - v (1.88)
donde v ~ wr / ws
el torque electromagnético se expresa como:
P r rTem = .ql . i'ar . (1.89)
s
35
dondep - número de polos.
ql = número de fases.
1.5.4 Tranaferncia de Potencia Activa y Reactiva entre
Generador y Barra Infinita.
El flujo de potencia en cualquier punto a lo largo de una
línea de alimentación puede encontrarse si se conocen la
tensión, la corriente y el factor de potencia.
Por definición matemática, la potencia aparente S, está dada
por:
S = V * I * = P + jQ (1.90)
donde: I*-* es la conjugada de la corriente.
P -* potencia activa
Q -* potencia reactiva
De acuerdo a lo expresado, se tiene que el flujo de potencia
en los terminales estatoricos, esta determinado por:
Ss = Vs . Is* = Ps + jQs (1.91)
donde
Ps •* flujo de potencia activa desde generador a barra.
Qs •* flujo de potencia reactiva entre generador y barra.
Cuando se conecta capacitores por fase en los terminales del
estator se tiene por (1.83), que la corriente Is se incrementa
en su componente reactiva con la proveniente del capacitor. La
potencia aparente en este caso queda expresada como sigue:
36
Sis = Vs . II* = Pls + jQls (1.92)
donde:
Pls -* flujo de potencia activa desde generador a barra.
Qls •* flujo de potencia reactiva entre generador y barra.
Se determina la dirección del flujo de potencia, consideran-
do de acuerdo al esquema circuital de la figura 1.8, una acción
motora en el lado del generador. Una vez obtenidos los valores
de potencia activa (P) y potencia reactiva (Q) en este punto,
se establecen las siguientes consideraciones:
- Si P (positivo), la máquina absorbe potencia activa.
- Si P (negativo), la máquina entrega potencia activa.
- Si Q (positivo), la máquina absorbe potencia reactiva.
- Si Q (negativo), la máquina entrega potencia reactiva.
De acuerdo a lo expresado, encontramos que para funciona-
miento de la máquina como generador, necesita ser provista de
potencia reactiva para su excitación a cambio de producir
potencia activa, lo que conduce a que se tenga un valor para P
(negativo) y un Q(positivo).
En el caso de la inclusión del capacitor como soporte de
potencia reactiva, encontramos en el funcionamiento en estado
estable, que la potencia reactiva que necesita la máquina
proviene de la barra infinita y del capacitor mientras la
corriente de éste sea inferior a la componente reactiva de la
corriente de estator. Cuando el capacitor produce corrientes
mayores, esta será suficiente para la excitación de la máquina,
37
por tanto se presenta un cambio en la dirección del flujo de
potencia reactiva entre el generador y la barra infinita.
1.6 MODELACIÓN DEL SISTQ1A DE POTENCIA EN CONJUNTO. [1, 2, 11]
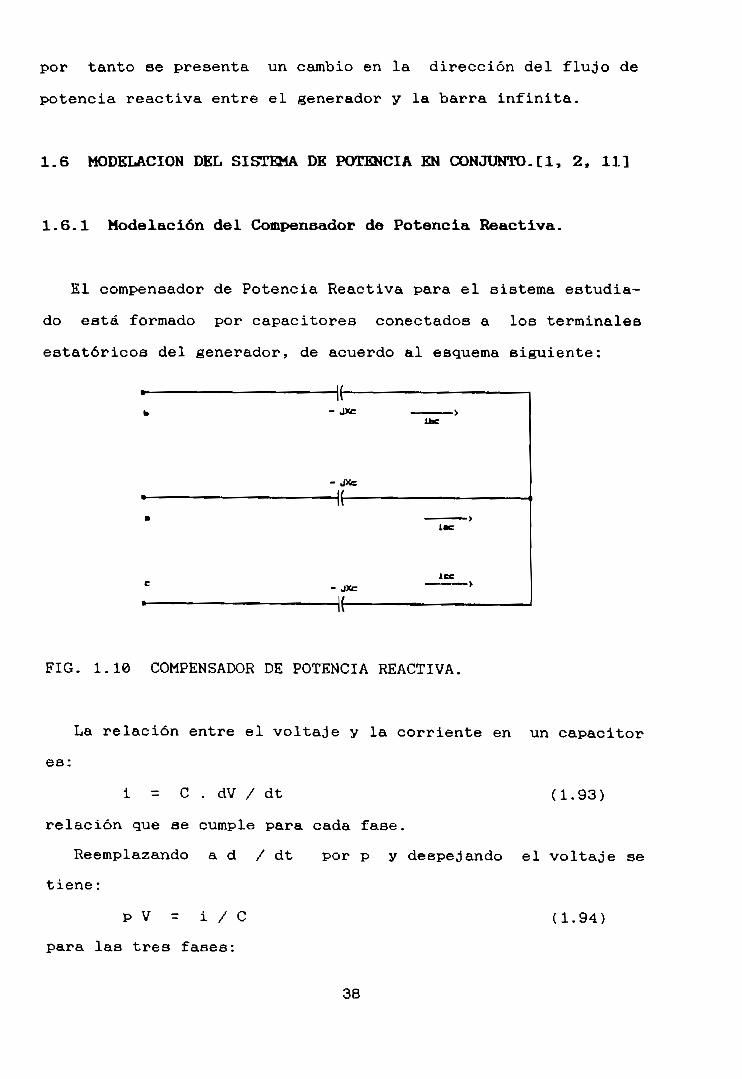
1.6.1 Modelación del Compensador de Potencia Reactiva.
El compensador de Potencia Reactiva para el sistema estudia-
do está formado por capacitores conectados a los terminales
estatóricos del generador, de acuerdo al esquema siguiente:
- jxc
- JXc
Hf-
- jxc
Hf-
ihc
ice
FIG. 1.10 COMPENSADOR DE POTENCIA REACTIVA.
La relación entre el voltaje y la corriente en un capacitor
es:
(1.93)i = C . dV / dt
relación que se cumple para cada fase.
Reemplazando a d / dt por p y despejando el voltaje se
tiene:
P V = i / C (1.94)
para las tres fases:
38

p [Vabc«] = (1 / C ) [iabcc]
Aplicando las ecuaciones de transformación a los ejes qdo se
tiene:
[ As ] p [ Vabc» ] = (1 / C) [ As ] . [ iabco ]
Aplicando la transformación inversa dentro del operador se
tiene:
[As] p { [As-a.] [Vqdo.] } - (1 / C) [iqdoc]
Derivando el producto y multiplicando
[As] {{ p[As-i]} [Vqdo-] + [As-*] pCVqdOa]} = (1 / C) [iqdOe]
[As] { p[As-i]} [Vqdo«] + p[Vqdo«] = (1 / C) [iqdoc]
de donde:
[As] pCAs-i] = [B] =
-0-w0
W00
000
con lo cual se obtiene
[B] [Vqdo*] + p[Vqdo«] = (1 / C ) Ciqdoc]
La matriz [B] depende de la velocidad de los ejes qdo,
entonces
p[Vqdo«] = (1 / C) [iqdoo]
reemplazando Xc - 1 / we Xc se tiene
p [ Vqdo« ] = we Xc [iqdoo] (1.95)
donde Xc es la reactancia de los capacitores por fase a la
39
frecuencia we.
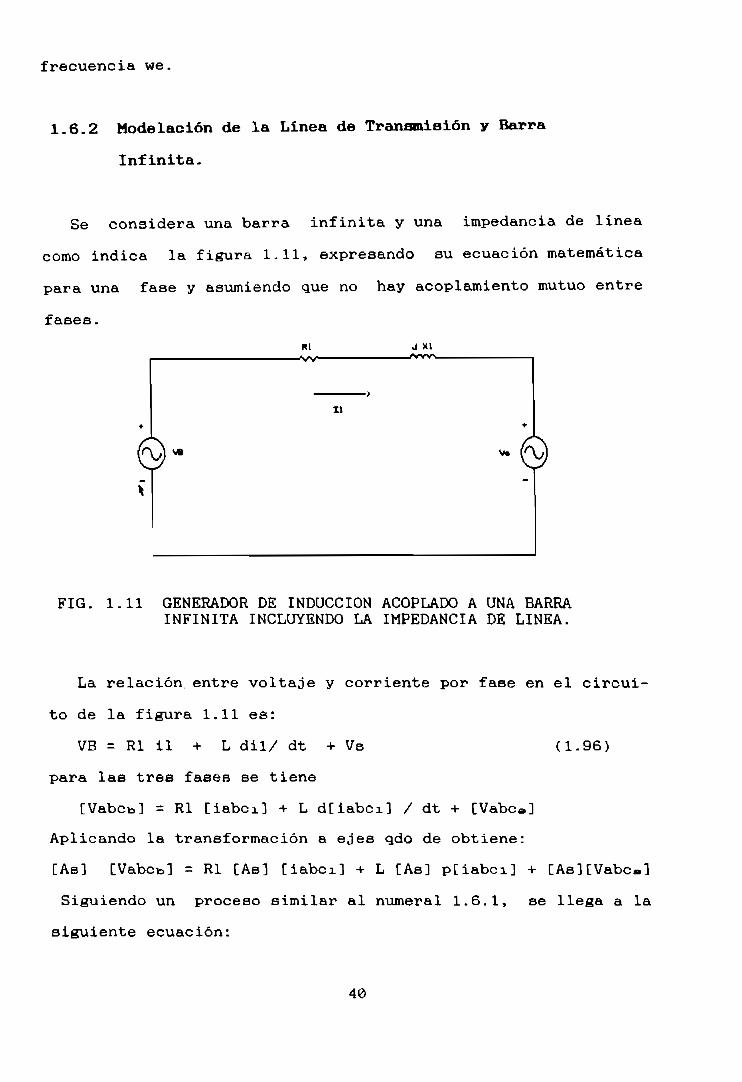
1.6.2 Modelación de la Línea de Transmisión y Barra
Infinita.
Se considera una barra infinita y una impedancia de línea
como indica la figura 1.11, expresando su ecuación matemática
para una fase y asumiendo que no hay acoplamiento mutuo entre
fases.
Rl J XI
II
FIG. 1.11 GENERADOR DE INDUCCIÓN ACOPLADO A UNA BARRAINFINITA INCLUYENDO LA IMPEDANCIA DE LINEA.
La relación entre voltaje y corriente por fase en el circui-
to de la figura 1.11 es:
VB = Rl il + L dil/ dt + Vs (1.96)
para las tres fases se tiene
[Vabcto] = Rl [iabci] + L d[iabci] / dt + [Vabc«]
Aplicando la transformación a ejes qdo de obtiene:
[As] tVabct>] = Rl [As] Ciabci] + L [As] pCiabci] + [As][Vabc«]
Siguiendo un proceso similar al numeral 1.6.1, se llega a la
siguiente ecuación:
we
XI
we Rl we[iqdi] + pCiqdi] + ---- [Vqd«]
XI XI
en forma explícita queda:
iql
idl
we
XI
Vqb
Vdb
we
XI
Vqs
Vds
we Rl
XI
— •iql
idl(1.97)
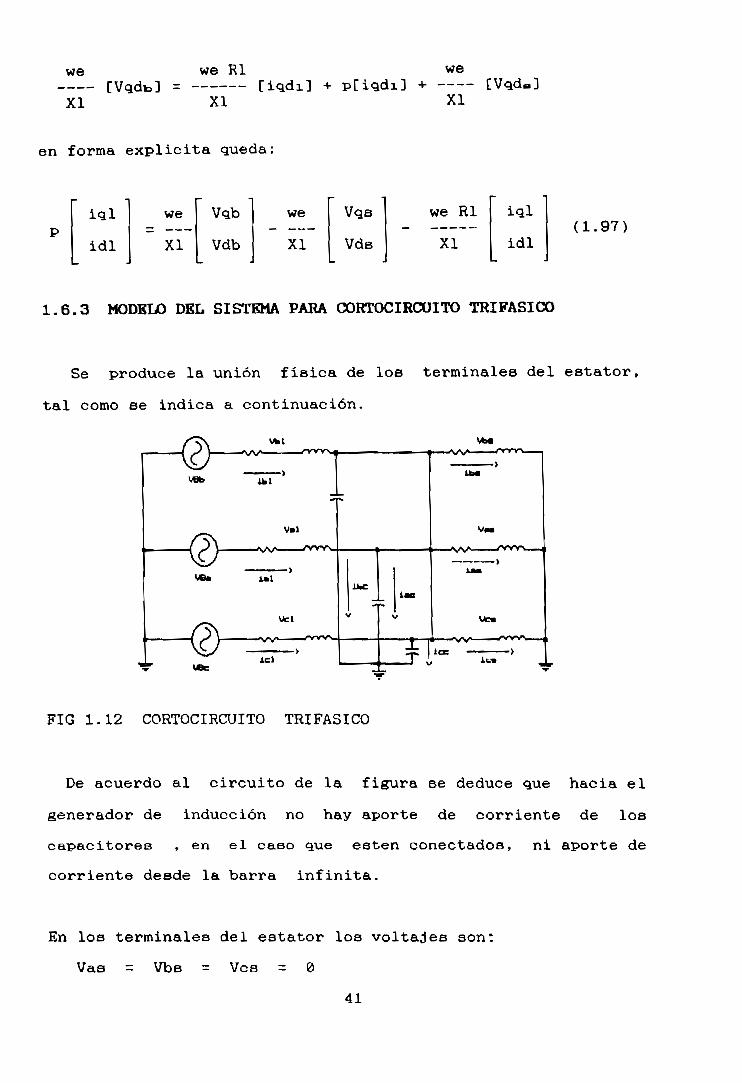
1.6.3 MODELO DEL SISTEMA PARA CORTOCIRCUITO TRIFÁSICO
Se produce la unión física de los terminales del estator,
tal como se indica a continuación.
«•
IfaC
••V
wi
i«c
t
•L \ Jiceicl
FIG 1.12 CORTOCIRCUITO TRIFÁSICO
De acuerdo al circuito de la figura se deduce que hacia el
generador de inducción no hay aporte de corriente de los
capacitores , en el caso que estén conectados, ni aporte de
corriente desde la barra infinita.
En los terminales del estator los voltajes son:
Vas = Vbs = Ves = 0
41

por lo cual
Vqs = Vds = Vos = e
Por lo tanto las ecuaciones que determinan el comportamiento
eléctrico, con y sin conexión de capacitores son las siguien-
tes:
pfqs = we rs fmq / Xls - we rs fqs / XlB
P<rds = we rs fmd / Xls - we rs fds / Xls
pf qr = we wr f dr + we r'r fmq / X'lr - we r'r f qr / X'lr
pf'dr = -we wr f'qr + we r'r fmd / X'lr - we r'r f'dr / X'lr
(1.9B)
donde fmq y fmd son obtenidos en ecuaciones (1,69).
1.6.4 MODELO DEL SISTEMA PARA CORTOCIRCUITO FASE - TIERRA.
En esta falla se produce la unión física de la fase A del
estator a la línea de tierra, teniendo por tanto el circuito
esquematizado de la siguiente forma en la figura 1.13.
Ubi
Stit»
Lm\l
icl
iba
T
Ve*
FIG. 1.13 CORTOCIRCUITO FASE A - TIERRA,
42
Las condiciones de falla deducidas del circuito de la figura
1.13 son:
CASO 1.- Con conexión de capacitores.
Vas = 0
ial = 0
ibs + ibc - ibl = 0
ics + ice - icl = 0
(1.99)
CASO 2.- Sin conexión de capacitores.
Vas = 0
ial = 0
ibs - ibl = 0
iCS - icl = 0
(1.100)
Para el sistema de ejes qdo, fijo en el estator [As] y
[As-1] vienen expresados de la siguiente forma.
As-1 =
As =
1-1/2-1/2
2/301 / 3
0 1-V3 / 2 1V3 / 2 1
- 1 / 3-f 3 / 31 / 3
1 / 3V3 / 31 / 3
(1.101)
(1.102)
Para calcular los voltajes y corrientes en los ejes abe se
utiliza la siguiente expresión matricial.
fafbfe
1 0- 1 / 2 - V 3 / 2- 1 / 2 V3 / 2
111
fqfdfo
(1.103)
Desarrollando el caso 1 con Vas = 0 en (1.103) se tiene;
43
Vos = - Vqs (1.104)
Haciendo ial = 0 en (1.103) se tiene:
iol = - iql (1.105)
Reemplazando las ecuaciones de corriente obtenidas de
(1.103) en ecuaciones de corriente de (1.99) y con el ordena-
miento debido se tiene:
- 1/2 iqs - V3/2 ids + ios - 1/2 iqc - -T3/2 idc + ioc + 1/2 iql
f V3/2 idl - iol - 0 (1.106)
-1/2 iqs + V3/2 ids + ios - 1/2 iqc + V3/2 idc -+• ioc + 1/2 iql
-V3/2 idl - iol = 0 (1.107)
Luego de reemplazar en (1.106) y (1.107) las ecuaciones
(1.104), (1.105) y (1.95) se obtiene:
(1 / (2 we Xc)) (pVqs - V3 pVds) = 1 / 2 iqs + V3 / 2 ids + ios
- 1 / 2 iql + V3 / 2 idl
(1 / (2 we Xc)) (pVqs + V3 pVds) = 1 / 2 iqs - -T3 / 2 ids - ios
- 1 / 2 iql - -T3 / 2 idl
Al realizar operaciones se llega a:
pVqs = (- we Xc / 3) iqs + (2 we Xc / 3) ios + we Xc iql
(1.108)
pVds = - we Xc ids + we Xc idl (1.109)
Reemplazando en (1.108) y (1.109), ees. (1.68) se tiene
44
pVqs = (- we Xc / 3 Xls) (fqs - fmq) + (2 we Xc / 3 Xls) Jos
+ we Xc iql. (1.110)
pVds = (- we Xc / 3 Xls) (fds - fmd) + we Xc idl (1-111)
En la línea de alimentación se cumple:
= we Ll [iqdi] - XI [iqdi] (1.112)
donde: XI •* reactancia de línea, a la frecuencia we.
Reemplazando (1.112) en ecuaciones (1.110) y (1.111) se
tiene
pVqs = (- we Xc / 3 Xls ) (fqs - fmq) + (2 we Xc / 3Xls) fos
+ (we Xc / XI) fql (1.113)
pVds = (- we Xc / Xls) (fds - fmd) + (we Xc / XI) fdl (1.114)
Multiplicando (1.97) por XI y sustituyendo por (1.112) se
obtienen las ecuaciones de concatenaciones de flujo por segundo
de la línea de alimentación. Así se tiene completo el modelo
matemático para esta falla.
= we Vqb - we Vqs - (we Rl / XI) . fql (1.115)
Pfdl = we Vdb - we Vds - (we Rl / XI) . fdl (1.116)
De esta manera las ecuaciones que rigen el comportamiento de
la máquina de inducción en forma global se detalla a continua-
ción.
45

pfqs = we Vqs + (we rs / Xls) fmq - (we rs / Xls) fqs
pfds = we Vds + (we rs / Xls) fmd ~ <we rs / Xlsí tds
pfos ~ - we Vos - (we rs / Xls) fos
pf'qr = we wr f'dr + (we r'r / X'lr) fmq - (we r'r / X'lr) f * qr
pf'dr = -we wr f'qr + (we r'r / X'lr) fmd - (we r'r /X'lr) f dr
Para cuando se tiene la conexión de capacitores adicional-
mente se tienen las ecuaciones siguientes.
pVqs = (-we Xc / 3Xls) (fqs - fmq) + (2 we Xc / 3 Xls) fos
+ (we Xc / XI) fql
pVds = (-we Xc /Xls) (fas - *md) + (we Xc / XI ) fdl
pfql = we Vqb - we Vqs - (we Rl / XI) fql
Pfdl = we Vdb - we Vds - (we Rl / XI) fdl (1.117)
1.6.5 MODELO DEL SISTEMA PARA CORTOCIRCUITO DOS FASES TIERRA.
El circuito en el momento de la falla se muestra en la
figura 1.14, con la unión física entre las fases A y B del
estator y la linea de tierra.
Sfel
leí
T
ibc
T
FIG. 1.14 CORTOCIRCUITO DOS FASES TIERRA
46

Las condiciones para esta falla se detallan a continuación:
CASO 1.- Con conexión de capacitores.
Vas = 0
Vbs = 0
ial = 0 (1.118)
ibl = 0
ics + ice - icl = 0
CASO 2.- Sin conexión de capacitores.
Vas = 0
Vbs = 0
ial = 0 (1.119)
ibl = 0
ics - icl = 0
Aplicando (1.103), se obtienen las siguientes igualdades:
Vds = - -T3 Vqs
Vos = - Vqs
idl = - V3 iql (1.120)
Í01 = - iql
Siguiendo un desarrollo similar al párrafo 1.6.5 , se
obtienen las ecuaciones que rigen el comportamiento eléctrico
de la máquina de inducción, en este estado de funcionamiento,
pfqs = we Vqs + (we rs / Xls) fmq - (we rs / Xls) <rqs
pjrds = -"T3 we Vqs - (we rs / Xls) fmd - (we rs / Xls) fds
pfos = - we Vqs - (we rs / Xls) fos
pf*qr = -we wr J'dr + (we r*r / X'lr)fmq - (we r'r / X'lr) f'qr
pf'dr = -we wr f'qr -»• (we r'r / X'lr)fmd - (we r'r / X'lr) f'dr
47
En la conexión de capacitores, se tienen adicionalmente las
siguientes ecuaciones :
pVqs = (-we Xc / 6 Xls) (fqs - fmq) -t- ( we Xc / 3 Xls ) fos
K3 we Xc / 6 Xls) (fds - fmd) + (we Xc / XI ) fql
~ we Vqb - we Vqs - (we Rl / XI) fql
(1.121)
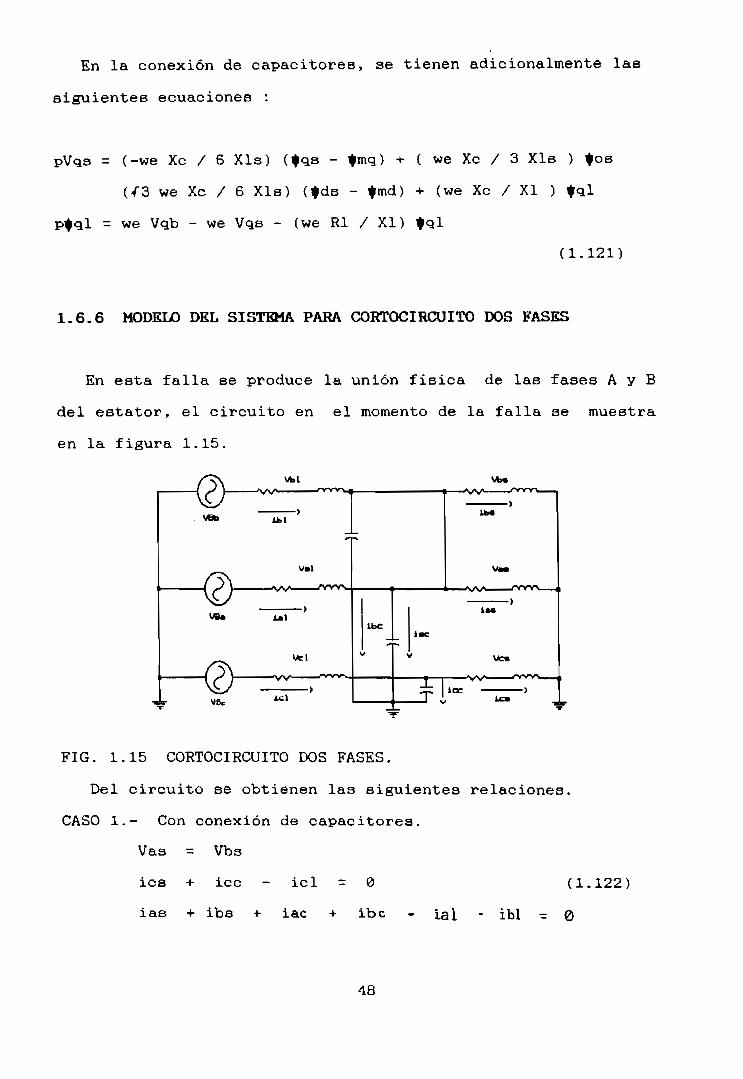
1.6.6 MODELO DEL SISTEMA PARA CORTOCIRCUITO DOS FASES
En esta falla se produce la unión física de las fases A y B
del estator, el circuito en el momento de la falla se muestra
en la figura 1 . 15 .
Vbl NA*
leí
IbC
US»
_J
FIG. 1.15 CORTOCIRCUITO DOS FASES.
Del circuito se obtienen las siguientes relaciones.
CASO 1.- Con conexión de capacitores.
Vas = Vbs
ics + ice - icl = 0 (1.122)
ias + ibs + iac + ibc - ÍQ\ ibl = 0
48

CASO 2.- Sin conexión de capacitores.
Vas = Vbs
ics - icl = O (1.123)
ias + ibe - ial - ibl = 0
Aplicando ecuación (1.103), se obtiene la siguiente igual-
dad:
Vds = - /3 Vqe (1.124)
Siguiendo un desarrollo similar al párrafo 1.6.5., se
obtienen las ecuaciones que rigen el comportamiento eléctrico
de la máquina de inducción para esta falla.
pfqs = we Vqs -*- (we rs / Xls) fmq - (we rs / Xls) fqs
pfds = -f3 we Vqs + (we rs / Xls) fmd - (we rs / Xls) fds
pfos = we Vos - (we rs / Xls) fos
pf'qr = we wr fdr + (we r'r / X'lr) fmq - (we r'r / X'lr)f'qr
pf dr = -we wr f'qr + (we r'r / X'lr)fmd - (we r'r / X'lr)fdr
Con la conexión de capacitores, se tienen adicionalmente las
siguientes ecuaciones:
pVqs = (-we Xc / 4 Xls) (fqs - fmq) -»- (we Xc / 4 XI)
+ (f3 we Xc / 4 Xls)(fds - fmd) - (V3 we Xc / 4
pVos = (-we Xc / Xls) fos - (we Xc / XI) fol
pfql = we Vqb - we Vqs - (we Rl / XI) fql
Pfdl = we Vdb - we Vds - (we Rl / XI) fdl
- we Vob - we Vos - (we Rl / XI) fol (1.125)
De acuerdo al grupo de ecuaciones (1.125), se encuentra que
49

las componentes del eje cero, sólo tienen interrelación entre
ellas. Se tiene además que los valores iniciales de las va-
riables de estado en el eje cero son nulos, por tanto estas
ecuaciones no influyen en el modelo matemático, retirándolas
del mismo. Por lo que el grupo de ecuaciones definitivo que
rige el comportamiento del generador en este estado de funcio-
namiento serán :
pfqs = we Vqs + (we rs / Xls) jmq - (we rs / Xls) fqs
pfds = -V3 we Vqs + (we rs / Xls) fmd - (we rs / Xls) jas
Pt'qr = we wr f 'dr + (we r'r / X'lr) fmq - (we r'r / X'lr)f qr
pfdr = -we wr f'qr + (we r'r / X'lr)^md - (we r'r / X'lr)f'dr
pVqs = (-we Xc / 4Xls) (fqs - fmq) + (we Xc / 4 XI) fql
(V3 we Xc / 4 Xls) (fds - fmd) - (V3 we Xc / 4 XI) fdl
Pfql = we Vqb - we Vqs - (we Rl / XI) t̂ l
= we Vdb - we Vds - (we Rl / XI) fdl (1.126)
1.6.7. MODELO DEL SISTEMA PARA APERTURA Y RECONEXION DE FASES.
Cuando las tres fases del estator son desconectadas de la
red de alimentación» las corrientes por fase de la máquina son
cero, asi:
ias = ibs = íes = 0 ( 1 . 127 )
por lo que en variables qdo se tiene:
iqs = ids = ios = 0 (1.128)

reemplazando en (1.68) se obtiene:
fqs = fmq
fds = fmd (1.129)
De acuerdo a (1.69), reemplazando (1.129) se tiene:
= (Xm / (Xm + X'lr)) f'qr
fmd = (Xm / (Xm + X'lr)) f'dr (1.130)
reemplazando (1.129) en (1.72) se obtiene
Vqs = p f qs / we
Vds = P t<*s / we (1.131)
Para el caso de desconexión de fases, se tiene que el aporte
de corriente por parte de los capacitores a la máquina es nulo,
por tanto las ecuaciones matemáticas que fijan el funcionamien-
to son las siguientes:
pf'qr = we wr fdr + (we r'r / X'lr) fmq - (we r'r / X'lr) f ' qr
pf'dr = -we wr fqr + (we r'r / X'lr)fmd - (we r'r / X'lr) f'dr
(1.132)
En algunos casos luego de la desconexión de fases se produce
la reconexión de las mismas, luego los últimos valores de
concatenaciones de flujo, corrientes rotóricas, velocidad y
torques, integrados en el instante anterior inmediato a la
reconexión, servirán como condiciones iniciales para el proceso
establecido.
51
Al realizarse la reconexión, existe aporte de corriente de
los capacitores a la máquina de inducción. Para la simulación
digital , las ecuaciones matemáticas que determinan este nuevo
estado de funcionamiento son las siguientes :
pfqs = we Vqs + (we rs / Xls) fmq - (we rs / Xls) fqs
pfds = we Vds -t- (we rs / Xls) fmd - (we rs / Xls) fds
Pt'̂ r - we wr t'cLr + (we r'r / X'lr) fmq - (we r'r / X'lr) f'qr
pf'dr = -we wr <r'qr + (we r'r / X"lr)^md - (we r'r / X'lr) f dr
(1.133)
En caso de conexión de capacitores se añaden las ecuaciones:
pVqs = (we Xc / Xls) (fmq - fqs) + (we Xc / XI)
pVds - (we Xc / Xls) (fmd - fas) + (we Xc / XI) fdl
= we Vqb - we Vqs - (we Rl / XI) fql
= we Vdb - we Vds - (we Rl / XI) fdl (1.134)
1.6.8 ANÁLISIS ELECTROMECÁNICO
Para el estudio desarrollado, la máquina motriz que se
encuentra acoplada mecánicamente al generador de inducción , es
un motor de corriente continua de excitación independiente.
De acuerdo a la ecuación (1.63), se considera despreciable
el coeficiente de amortiguamiento mecánico de donde obtenemos:
p wr = (Te + Tm) / J (1.135)
El par magnético desarrollado por el motor de corriente
52
continua y entregado al generador es:
Tm = Kf if ia (1.136)
donde: Kf e if son constantes cuando se trata de un motor con
excitación independiente.
Del motor de corriente continua se desprenden las siguientes
ecuaciones:
Vt = Ea + La pia + Ra ia (1.137)
Ea = Kf if wr (1.138)
donde: Vt -* tensión en bornes del circuito inducido.
Ea -* tensión inducida.
La -* autoinducción del circuito de inducido.
Ra •* resistencia del circuito de inducido.
De ecuación (1.137) se obtiene:
Pia = (Vt - Kf if wr - Ra ia) / La (1.139)
De esta forma las ecuaciones (1.135) y (139), determinan el
comportamiento electromecánico del sistema. Para la simulación
digital del estado estable y transitorio del sistema, se exige
la inclusión de las ecuaciones de comportamiento eléctrico
desarrolladas para cada falla en secciones anteriores, así como
laa ecuaciones presentadas en esta sección.
53
1.7 ECUACIONES DIFERENCIALES DEL SISTEMA MOTOR - GENERADOR EN
POR UNIDAD. [11, 16]
La representación de las ecuaciones diferenciales motor-
generador en el "Sistema por Unidad", es una gran ventaja,
puesto que cada magnitud se expresa con relación a otra tomada
como base .
Se toman como valores base, los datos de placa de potencia,
voltaje y frecuencia, definiendo posteriormente el resto de
valores base, así tenemos:
SB : potencia aparente base por fase.
VB : voltaje base [ voltios / fase],
fB : frecuencia base [ berta].
De estos valores base, se obtienen los siguientes valores
base:
IB = SB / VB [amperios]
ZB = VB / IB [ohmios]
WB = 2 TI f B [ rad / seg ] (1.140)
LB = ZB / WB [ henrios ]
= LB IB
Multiplicando en ecuación de concatenaciones de flujo por WB
se tiene:
fB = XB IB
pero XB = ZB
54
con lo que se tiene:
= VB
El torque base se define por:
VB IBTB = (1.141
(2/n) (2/P) WB
donde P es el número de polos.
Definidos los valores base, para cada uno de los parámetros
que intervienen en el modelo matemático, se puede expresar
cualquier valor del sistema motor - generador con relación a
estos, utilizando la siguiente relación general:
Valor realValor p. u. = (1.142)
Valor base
El pasar al sistema en por unidad es simple, ya que aplican-
do la relación (1.142) se obtiene que las ecuaciones no se
alteran, con excepción de la ecuación de torque electromag-
nético , la misma que queda de la siguiente manera:
Te = f'qr i'dr - fdr i'qr (1.143)
Reemplazando los valores de i'dr e i'qr definidos en (1.68),
se llega a la siguiente expresión para el torque electromagné-
tico.
Te = (f'clr fmq - f'qr fmd ) / X'lr (1.144)
55
Además en las ecuaciones diferenciales del modelo matemático
para el sistema en por unidad, se reemplaza We por WB.
Para la velocidad del rotor se tiene :
pwr = ( Te + Tm ) / 2 H (1.145)
donde: H : es la constante de inercia de la máquina
definida por la siguiente expresión.
5.48 J Ws2 10-6H = (1.146)
Sn
siendo J : momento de inercia de la máquina en [Kg m2]
Ws : velocidad sincrónica de la máquina deinducción en R.P.M.
Sn : potencia aparente nominal de la máquina enKVA.
Con respecto a la ecuación de corriente de armadura (1.139),
no se la transforma al sistema en por unidad. Se calcula el
torque electromecánico en por unidad en el momento que sea
necesario, para el correcto funcionamiento de la simulación
digital; estas ecuaciones quedan de la siguiente manera:
pia = Kl - K2 wr - K3 ia (1.147)
Tm = K4 ia / TB p.u. (1.148)
donde Kl = Vt / La
K2 = Kf if WB / (La P)
K3 = Ra / La
K4 = Kf if
56
C A P I T U L O II
MODELACIÓN DIGITAL DEL SISTEMA EN CONJUNTO.
Introduce ion.-
Para dar una mejor comprensión del programa digital realiza-
do, en el desarrollo del capítulo se presenta el método se-
guido, con la descripción del programa principal y sus subpro-
gramas.
La simulación de la máquina de inducción en estado estable,
se realiza resolviendo el circuito equivalente con sus paráme-
tros expresados en por unidad, trabajando con valores fracció-
nales de un valor base escogido .
Para el funcionamiento en estado transitorio también se
utiliza el sistema por unidad, para este caso se resuelve un
sistema de ecuaciones diferenciales las mismas que requieren de
valores iniciales; esto se lo hace en base al algoritmo de
Runge - Kutta de cuarto orden, posteriormente los valores
obtenidos en el sistema de ejes qdo son transformados al
sistema de ejes abe en el tiempo, permitiendo la representación
gráfica de cada una de las variables.
Se muestra el desarrollo de los distintos diagramas de
flujo, algunos de los cuales han sido resumidos debido a que
resultan extensos y algunos de ellos innecesarios.
El desarrollo del programa se realiza de tal manera que
permita una operación interactiva con el usuario, haciendo
posible modificar datos y controlar el ingreso de los mismos
para evitarse errores.
2.1 MKTODO DE SOLUCIÓN
En el capitulo primero se determinan las ecuaciones de la
máquina de inducción y de continua y la manera de implementar
los distintos casos a simular, pero para la simulación de
cualquier tipo de falla se necesitan datos para realizar el
proceso de cálculo y presentar los resultados mediante gráficos
que permitan realizar un análisis de las distintas variables de
la máquina de inducción, estos datos se agrupan gradualmente a
medida que se va desarrollando el programa.
La máquina de inducción y el banco de capacitores, soporte
de potencia reactiva funcionan en conexión Y puestos a tierra.
2.1.1 Condiciones iniciales
a) Máquina de Inducción .- En la solución de las ecuacio-
nes diferenciales, siempre se requiere de valores iniciales,
los mismos que son obtenidos resolviendo el circuito equivalen-
te por fase de la máquina asumiendo un valor de deslizamiento
que es determinado por la velocidad del rotor.
Los valores en los ejes qdo, para el estado estable de
cualquier variable se puede obtener partiendo del módulo y el
ángulo del fasor de la variable, teniendo en cuenta que la
58
referencia del sistema esta fija en el estator ( W = 0 ) y la
componente de cualquier variable en el eje cero es nula.
b) Máquina de Continua .- Con la finalidad de tener conoci-
miento de la variación del torque motriz, se calculan los
valores de corriente de armadura (ia) y de campo (if), para una
determinada operación del generador.
Las corrientes de armadura (ia) y de campo (if) en la
máquina de continua funcionando como motor se expresa de la
siguiente forma:
Ra ia2 - Vt ia + Wr Te = 0 (2.1)
Teif = (2.2)
Kf ia
2.1.2 Método de solución del programa digital
El proceso seguido en el desarrollo del programa digital se
describe a continuación:
Ingresar los parámetros de las máquinas de inducción y de
continua.
Seleccionar en la simulación escogida, si se incluye el
banco de capacitores conectados a los terminales del
generador.
Seleccionar si en la simulación se incluye la saturación
59
magnética del núcleo.
Ingresar los valores de velocidad angular y de impedancia de
la linea de transmisión.
Hallar las condiciones de funcionamiento en estado estable.
Ingresar el ángulo en el cual se produce la falla asimétri-
ca en los terminales del generador.
Para el caso de apertura y reconexión de las tres fases se
ingresa el tiempo de desconexión de las fases.
Ingresar el voltaje de alimentación de la máquina motriz, en
el caso de realizar la simulación incluyendo la variación
del torque electromecánico.
Transformación de valores en estado estable, al sistema de
ejes QDO constituyendo las condiciones iniciales para la
solución de las distintas fallas estudiadas.
Integrar las ecuaciones diferenciales por el método de Runge
Kutta de cuarto orden.
Transformación de variables QDO a variables ABC en el
estator.
Graficación de los transitorios obtenidos de la simulación
de fallas y de apertura - reconexión de fases, para cada
60
variable.
2.2 DESCRIPCIÓN DE LOS ALGORITMOS
Para la implementación del programa digital se hace necesa-
rio desarrollar algoritmos que simplifican la solución matemá-
tica, los mismos que se encuentran especificados en subprogra-
mas.
El desarrollo consta de un programa principal, de donde se
derivan los diferentes subprogramas realizados.
2.2.1 Programa principal
El proceso seguido por el programa principal, se agrupa en
el desarrollo de menús que permiten realizar el ingreso de
datos, impresión de resultados , simulaciones de fallas asi
como la representación gráfica de las variables.
Antes del ingreso al menú principal, el programa solicita
los parámetros de la máquina de inducción y de la máquina
motriz, que se lo hace directamente o a través de archivos
cargados previamente.
Los menús que forman el programa son los siguientes:
Menú Principal
Menú de Simulaciones
- Menú de Gráficos
61

a) Menú Principal.- Este menú presenta las siguientes opcio-
nes:
* Hacer Simulaciones
* Datos de la Máquina de Inducción
* Cambiar Datos de la Máquina de Inducción
* Datos de la Máquina Motriz
* Cambiar Datos de la Máquina Motriz
* Hacer Impresión de Resultados.
* Finalizar el Programa
En la opción "hacer simulaciones ", se ingresa a un menú de
simulaciones que permite escoger el estudio a realizarse.
La opción " datos de la máquina de inducción ", presenta los
valores de los parámetros (rs, Xls, Xm, X'lr, r'r, H, VN,
IN, P, f), los mismos que pueden ser cambiados utilizando la
respectiva opción.
La opción "datos de la máquina motriz", presenta los valores
de los parámetros (Ra, La, Kf, VN, IN), y de la misma forma
se cambian haciendo uso de la opción respectiva.
La opción "hacer impresión de resultados", da la posibilidad
de pasar a un impresor los datos de las máquinas, los
resultados que se obtienen cuando el generador opera en
estado estable así como datos adicionales provenientes de la
simulación en estado transitorio.
La opción "finalizar el programa", permite al usuario
62
terminar con la ejecución del mismo, no sin antes realizar
la verificación respectiva.
b) Menú de Simulaciones. - Dentro de este menú se presentan
los posibles casos a simular:
* Generador en Estado Estable
* Cortocircuito Trifásico
* Cortocircuito Fase - Tierra
* Cortocircuito Dos Fases - Tierra
* Cortocircuito Dos Fases
* Apertura y Reconexión de Fases
* Regresar al Menú Principal
Para todos los casos indicados de simulación, el programa da
la posibilidad de incluir la conexión del banco de capacitores
y de considerar la saturación magnética del núcleo.
Para el caso de la simulación del generador en estado
estable, se ingresa la impedancia de la linea de transmisión y
la velocidad angular, obteniendo los resultados respectivos.
Para los casos de simulación de estado transitorio, luego de
obtener los resultados en estado estable se calculan las
condiciones iniciales que incluyen: ingreso del ángulo de falla
sea en voltaje o corriente de fase, cálculo de variables de la
máquina motriz y transformación de variables del generador al
sistema QDO con las condiciones de falla respectivas; para
finalmente resolver las ecuaciones diferenciales.
63

c) Menú de Gráficos.- Dentro de este menú, el programa da la
posibilidad de escoger las variables que se quiere graficar en
la pantalla, entre los que se incluyen corrientes de fase,
voltajes de fase, torque electromagnético y torque mecánico,
velocidad angular entre otros.
2.2.2 Descripción de Subprogramaa
El desarrollo de subprogramas constituye una gran ayuda,
pues simplifica el desarrollo y da rapidez a la ejecución. A
continuación se describe la función realizada por cada uno de
ellos:
a) Subprograma CINIVAR .- En este subprograma se procede al
cálculo de condiciones iniciales de la máquina motriz, ingreso
del ángulo de falla sea en el voltaje o corriente de la fase a,
ingreso del tiempo de desconexión para el caso de apertura y
reconexión de fases, cálculo de concatenaciones de flujo Xmq y
Xmd incluyendo la posibilidad de la saturación y se indica el
número de ecuaciones diferenciales a tomarse en cuenta según la
falla con el respectivo cálculo de las variables de estado.
b) Subprograma INTEGRADIF .- En este subprograma se realiza la
solución de las ecuaciones diferenciales para lo que se asigna
un paso de integración que va aproximando a las funciones por
rectas, por lo que ésta aproximación debe ser ponderada de tal
forma de no perder puntos importantes de los fenómenos que se
analiza. Un paso de integración muy pequeño trae problemas al
obtenerse resultados erróneos.
64

En el desarrollo del programa se asigna un DT = 0.001
segundos para el caso de fallas sin conexión de capacitores. La
inclusión del banco de capacitores trae consigo el desarrollo
de altas frecuencias introduciendo perturbaciones en los
resultados por lo que se hace necesario tener un paso de
integración muy pequeño en este caso un DT = 0.000075 segundos.
c) Subprograma GRAFIOS .- Este subprograma se encarga de
graficar en la pantalla los resultados obtenidos de la simula-
ción en estado transitorio. Se presentan gráficos de voltajes y
corrientes de fase, torques electromagnético y electromecánico,
potencia trifásica , velocidad angular, voltajes y corrientes
de barra, corrientes en la línea de transmisión, dando la
posibilidad de variar el tiempo de muestra de la falla hasta un
cierto valor limite. Al salir del subprograma GRAFIOS, se
pierden los datos y gráficos obtenidos por lo que antes se
realiza una verificación. Se encuentran valores máximos y
mínimos de las variables a graficar para lo cual se llama al
subprograma MAXMIN.
d) Subprograma TQDOABC .- En este subprograma se realiza la
transformación de variables desde sistema de ejes QDO al
sistema de ejes en el tiempo ABC. Los valores que se obtienen
permiten realizar la respectiva graficación de las variables,
para lo cual se llama al subprograma GRAFIOS.
e) Subprograma MINDUCCION .- Mediante este subprograma se
ingresan los valores en por unidad de los parámetros de la
máquina de inducción haciendo una verificación, los mismos que
65

son cargados en un archivo.
f) Subprograma MCONTINUA .- Mediante este subprograma se
ingresan los parámetros de la máquina motriz, realizando su
respectiva verificación y cargándolos en un archivo.
g) Subprograma LINEAT .- Se encarga de ingresar los valores en
por unidad de los parámetros de la impedancia de la linea de
transmisión, dando un mensaje de error cuando se tienen datos
fuera de rango.
h) Subprograma ALRUKUTTA . - En este subprograma se desarrolla
el algoritmo matemático Runge - Kutta de cuarto orden, para la
solución de las ecuaciones diferenciales, el mismo que es
llamado por el subprograma INTEGRADIF en cada paso de integra-
ción.
i) Subprograma SATURAC .- En este subprograma se desarrolla
las ecuaciones que determinan la saturación magnética del
núcleo y para tal efecto es llamado por los subprogramas
CINIVAR y ALRUKUTTA.
á) Subproarama OPESTABLE .- Dentro de este subprograma se
calculan las condiciones de funcionamiento en estado estable
del generador de inducción en voltajes y corrientes. Se obtiene
además los resultados de flujos de potencia activa y reactiva
desde el generador hacia la barra infinita. Entre datos adicio-
nales calculados se incluye el factor de potencia, torque
electromagnético y deslizamiento.
66
k) Subprocrama CEDTF .- En vista de que las ecuaciones diferen-
ciales necesitan ser evaluadas en cada paso de integración y
debido a la inconveniencia que resulta repetir los cálculos de
los coefientes que acompañan a las variables de estado, en este
subprograma se cumple con tal cometido.
2.3 DIAGRAMAS DE FLUJO
A fin de tener una mejor comprensión de la estructura del
programa, se desarrollan los diagramas de flujo del programa
principal y de los principales subprogramas, algunos de los
cuales han sido resumidos por lo extensos que resultan.
67
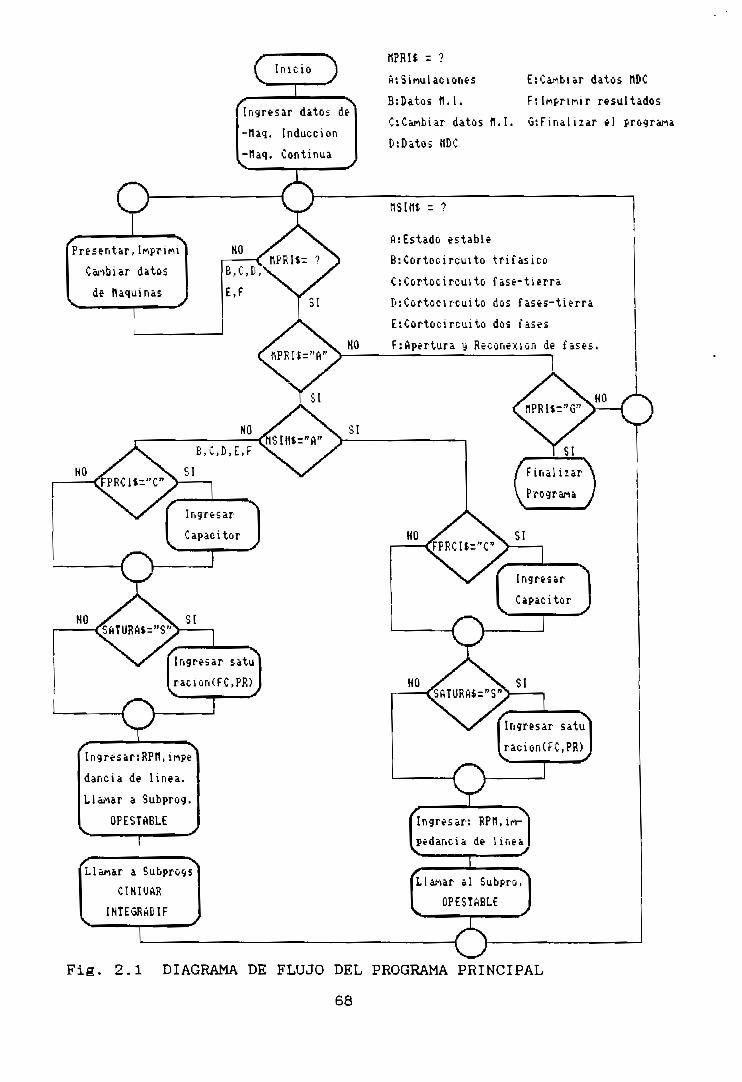
{ I n i c i o
Ingresar datos de
-tlaq. Inducción
-flaq. Continua
oPresentar,
C¿Tibiar datos
de Raqui ñas
| Ingresar satu|
l racÍQn(FC,PJí)J
I n g r e s a r i R P U , i
danc ía de I inea .
a Subprog.
OPESTABLE
a SubprogsCIHIUñR
IHIEGRADIF
ttPRU = ?
H' .SiMulaciones E:Canbiar datos flDC
B:Datüs f l . I . F : l M p r i f n i r resultados
C:Canbiar datos F l . I . G:Finál i iar el programa
B:Datos HDC
= ?
H:Estado estableB i C o r t o c i r c u i t o t r i f á s i co
C:Cortocircuito fase-tierra
['¡Cortocircuito dos íases-tierra
E:Cortocircuito dos fases
F:fipertura y Reconexion de fases.
¡Ingresar: R P n , i r t - |Ipedanc ia de l i n e a l
ÍLla^ar al Subpro.
ÜPESTABLE
Fig. 2.1 DIAGRAMA DE FLUJO DEL PROGRAMA PRINCIPAL
68
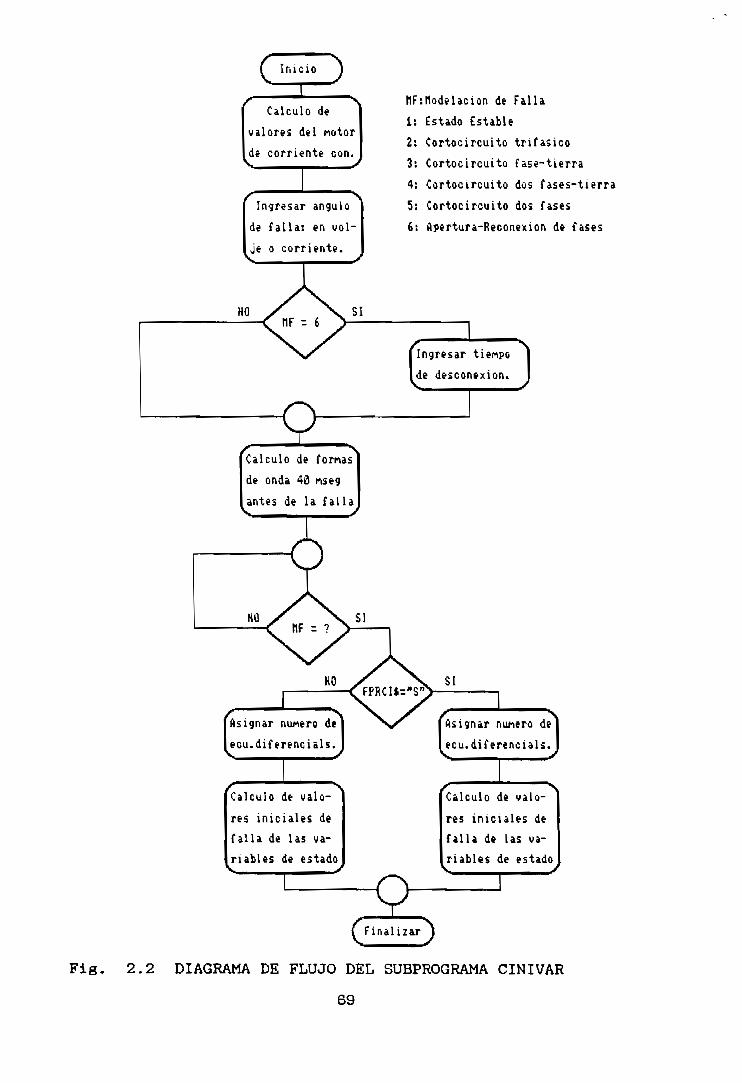
( Inicio J
p I _«^— !.»..• ̂
Calculo de
yalores del Motor
de corriente con.
Ingresar ángulo
de falla: en vol-
je o corriente.
NO
Calculo de Tornas
de onda 40 hseg
antes de la falla
HFirtodelacion de Falla
i: Estado Estable
2: Cortocircuito trifásico
3; Cortocircuito fase-tierra
4: Cortocircuito dos fases-tierra
5: Cortocircuito dos fases
6: Apertura-Reconexion de fases
[Ingresar t iewpo |
Ide desconexión. J
Jftsignar nu«ero dej \/̂ ¡Asignar nurtero de|
lecu.diferenciáis.J Iecu.diferenciáis.J
Calculo de valo-
res iniciales de
falla de las va-
riables de estado
Calculo de valo-
res iniciales de
falla de Las va-
riables de estado
( F i n a l i z a r J
Fifi. 2.2 DIAGRAMA DE FLUJO DEL SUBPROGRAMA CINIVAR
69

Llagar a Subpro-
gra*i CEDIF
(TF = .C57 segl ÍTF = .
JDT = .000075sl (DI = .
= .3
001 seg T=.091seg
ÍLlanar a Subprog
I ftLRUXUTTA
Subprogras
r Q D O A B C i G R f t F I C S
Fig. 2.3 DIAGRAMA DE FLUJO DEL SUBPROGRAMA INTEGRADIF
70
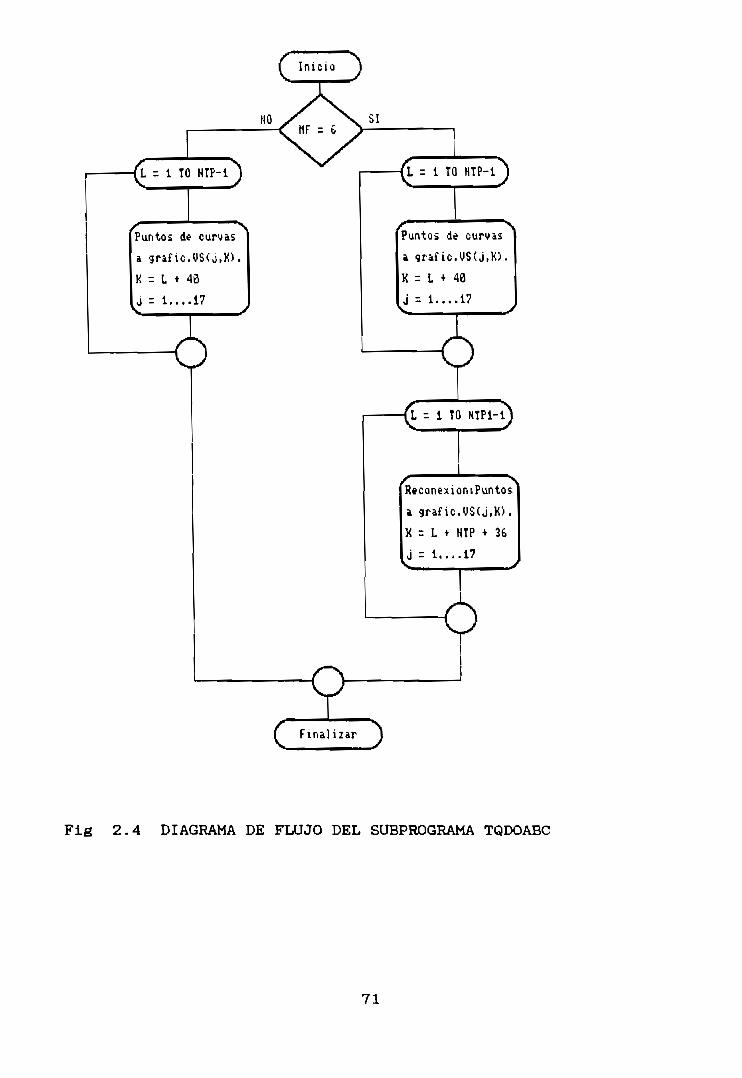
Puntos d* curvas
a g r a f i c . U S ( j , K ) .
K = L + 40
J = 1....17
O
cFinalizar
Puntos de curvas
a granc.USCJ,K>.
K = L + 40
J = i....17
ri = i TO HTPI-
ReconexioniPuntos
a grafic.USíj.K).
X = L + NTP + 36
j = 1....17
Ó
Fifi 2.4 DIAGRAMA DE FLUJO DEL SUBPROGRAMA TQDOABC
71

HO
-. . .Ingresar nombre
del archivo de
datos.V ... _, <*
f \r los datos
almacenados a los
parámetros de naqV J
r >Ingresar paráme-
tros de m. induce:
w.Xls.Xn.X1 Ir,
r'r , H.^
S "\r datos de
placa de n.induc;
UN,IN,f,NP.V J
S NVerificación de
los valores de pa
rametros.V ... *
f NAlmacenar datos
ingresados en ar-
chivo del sistemaV J
c\
F i n a l i z a r
Fig. 2.5 DIAGRAMA DE FLUJO DEL SUBPROGRAMA MINDUCCION
72

Ingresar nombre
de archivo de da
tos.
Asignar los datos
almacenados a los
parámetros de naq
Comprobación de
los datos asigna-
dos.
NO
O
Ingresar paráme-
tros de Maquina:
Ra,La, Kf.
Ingresar datos de
placa de Maquina:
UN , IH.
Datos alhacenados
en un archivo del
sisteria.
C Finalizar J
Fifí. 2.6 DIAGRAMA DE FLUJO DEL SUBPROGRAMA MCONTINUA
73
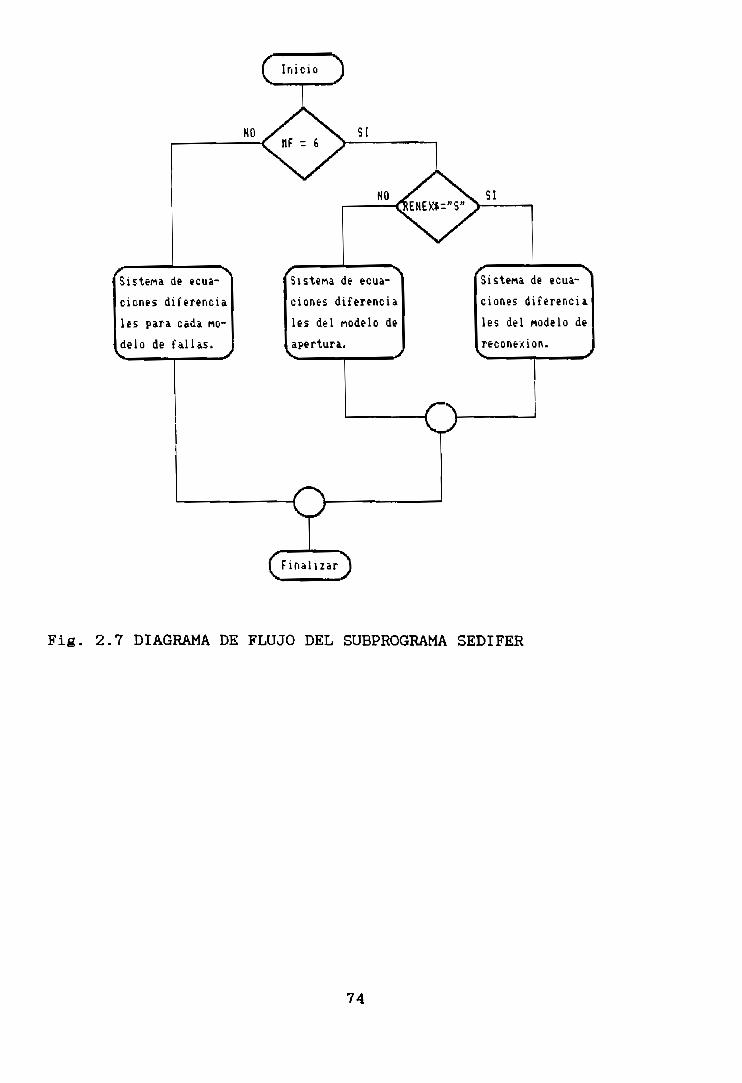
Sistema de ecua-
ciones diferencia
les para cada MO-
délo de fallas.
Si siena de ecua-
ciones diferencia
les del modelo de
apertura.
de ecua-
ciones diferencia
les del Modelo de
reconexion.
O
f Finalizar j
Fig. 2.7 DIAGRAMA DE FLUJO DEL SUBPROGRAMA SEDIFER
74
C A P I T U L O III
PRUEBAS EXPERIMENTALES DE LABORATORIO.
Introduceion.-
Corresponde a este capítulo presentar los resultados experi-
mentales de las pruebas realizadas en el laboratorio y los
resultados obtenidos del modelo matemático.
Las pruebas experimentales son realizadas utilizando el
motor de 2.25 HP, 220 / 380 voltios, 7 / 4.04 amperios, co-
nexión del estator D/Y, 4 polos, 60 Hz y de rotor bobinado.
Los parámetros de la máquina de inducción trifásica (Xls,
X'lr, r'r y Xm ) son determinados mediante las pruebas de vacio
y de rotor bloqueado. Para hallar la constante de inercia del
sistema H se calcula el momento de inercia J, para lo cual se
usa el método electromecánico realizando las pruebas de vacio
desacoplado y desaceleración. La curva de magnetización y la
relación de espiras son determinadas dejando el rotor en
circuito abierto con el estator en conexión estrella aplicando
a este el voltaje trifásico nominal de de 220 voltios a la
frecuencia nominal de 60 Hz. , tomando luego los datos respecti-
vos para cada caso. Todas las pruebas para encontrar estos
parámetros se encuentran descritos en el Apéndice I.
Los parámetros de la línea de alimentación trifásica (RL,
XL) , así como los del motor de corriente continua (Kf, Ra, La)
son determinados de acuerdo a los procedimientos desarrollados
en el Apéndice II.
Para las pruebas de laboratorio en funcionamiento estable y
posteriormente en la realización de fallas, la configuración
del estator en la máquina de inducción como en los capacitores,
se lo hace en conexión estrella.
En el desarrollo de las pruebas se procede primeramente
arrancando el motor de corrinete continua. Cuando la máquina
motriz ha alcanzado una velocidad por encima de la sincrónica
Ws.el generador es llevado a la línea, procedimiento que no
requiere gran presición. Con el sistema en marcha se toman
datos de las variables del generador y del motor DC. y se
realiza la falla grabando al mismo tiempo las ondas de voltaje
o corriente en un oeciloscopio, para luego pasar la señal a un
grafizador que por las limitaciones de este, sólo es posible
pasar una onda para su graficación.
3.1 CARACTERÍSTICAS DE ESTADO ESTABLE.
Con la puesta en marcha del sistema motor - genrador,
estabilizando su funcionamiento a una determinada velocidad, se
obtiene la respuesta en cuanto a valores de corriente y volta-
jes en la máquina de inducción, línea de alimentación, capaci-
tores y barra infinita, aaí como las potencias activa y reacti-
va provenientes del generador y barra infinita respectivamente.
Los resultados que se obtienen son tomados en base a la res-
puesta que da la conexión o no de los capacitores.
76
3.1.1 Generador sin conexión de capacitores.
Para una velocidad de operación determinada (Wr) en estado
estable del generador de inducción, con voltaje de alimentación
entre lineas de 220 voltios a la frecuencia nominal se obtienen
los siguientes valores:
Para
Wr = 1850 [RPM]
Resistencia de línea de alimentación (RL) = 0.006046 [p.uJ
Reactancia de línea de alimentación (XL) = 0.003282 [BU]
Se obtiene:
deslizamiento (S) = -.002777
Torque eleetromagnético (Tm) = - 3.9495 [N.m]
Factor de potencia (f.p.) = -.4621892
Potencia activa (P) = -719.4503 [Watt]
Potencia reactiva (Q) = 1380.377 [Var]
De aquí se desprende que la potencia reactiva que absorbe la
máquina de inducción Q es igual a la potencia reactiva que
entrega la barra infinita Qb. Luego se tiene que: Q = Qb.
En lo que tiene que ver con corrientes y voltajes se obtie-
nen los siguientes valores dados en por unidad:
77
Fasor Fase
Voltaje de estator (Vs) : 1.0 0.0
Corriente de estator (Is) : 0.583788 -117.5285
Corriente de rotor ref.est.(I*r) : 0.2930677 4.464896
Corriente de magnetización (Im) : 0.495383 -87.41327
Corriente de línea (IL) : 0.5837888 117.5285
Voltaje de barra infinita (Vb) : 1.000046 -0.2274307
Los valores base que se toman en consideración son los
sigientes:
SB = 889.119 [VA]
VB = 220 [V]
IB = 4.04145 [A]
TB = 7.075385 [N.m]
ZB = 54.43591 [Q]
fB = 60 [Ha]
WB = 377 [rad/seg]
3.1.2 Generador con conexión de capacitores.
Para una determinada velocidad de operación en estado
estable con voltaje de alimentación de 380 V entre líneas a la
frecuencia nominal y con capacitores conectados en los termina-
les del generador se obtienen los siguientes resultados:
Para:
Wr = 1850 [RPM]
Capacitor por fase (C) =20 CuF]
78
Resistencia de línea de alimentación (RL) = 0.006046 [p.u]
Reactancia de linea de alimentación (XL) = 0.003282
Se obtiene:
Deslizamiento (S) = -0.002777
Torque electromagnético (Tm) = -3.949572 [N.m]
Factor de potencia (f.p.) = -0.9294471
Potencia activa (P) = 719.4503 [Watt]
Potencia reactiva desde capacitor (Qc) = 1094.782 [Var]
Potencia reactiva desde la barra (Qb) = 285-595 [Var]
Con la conexión de capacitores se cumple que la potencia Q
necesaria para el generador está dada por Q = Qc -»• Qb, mientras
Qc < Q. Para cuando se tiene Qc >= Q, no existe flujo de
potencia reactiva desde la barra infinita al generador, dando
origen a una autoexitación.
En lo referente a valores de corrientes y voltajes obtenidos
se tienen los siguientes expresados en por unidad:
Voltaje de estator (Vs)
Corriente de estator
Corriente de rotor ref. esta.(I'r)
Corriente de magnetización (Im)
Corriente de estator (Ic)
Corriente de línea (IL)
Voltaje de barra ( Vb)
Fasor
= 1.0
= 0.583788
= 0.2930677
= 0.4953B3
= 0.4105844
= 0.2903025
= 0.9987248
Fase
0.0
-117.5285
4.464896
-87.41327
89.99998
-158.3488
-0.086491
79
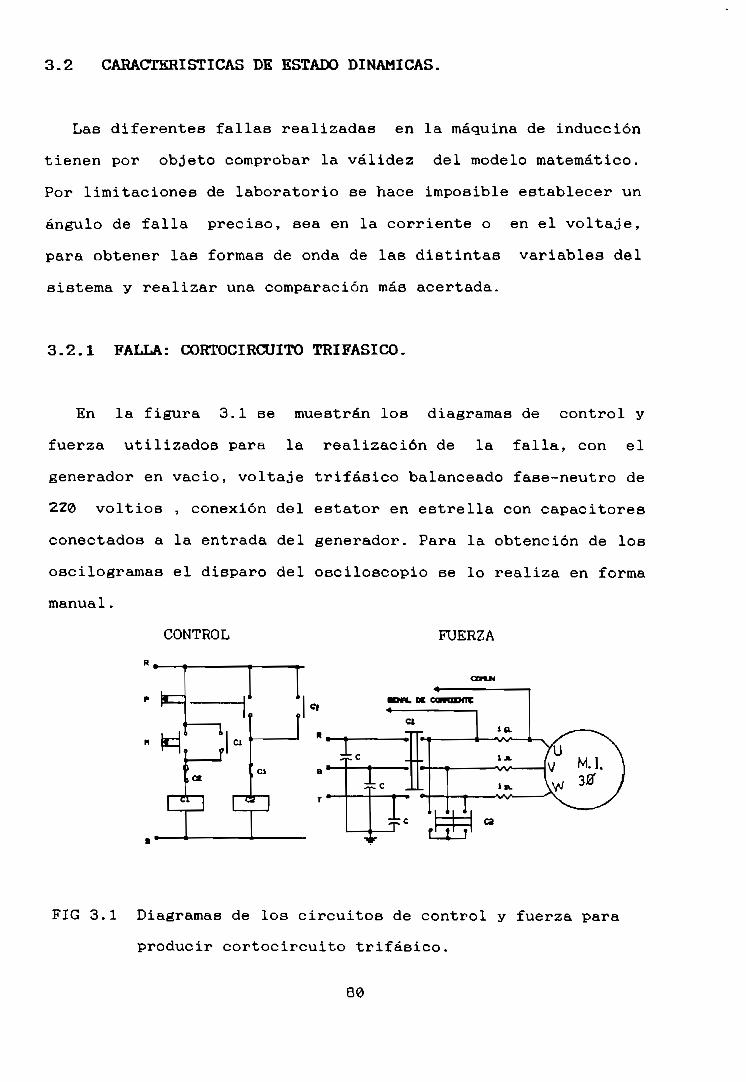
3.2 CARACTERÍSTICAS DE ESTADO DINÁMICAS.
Las diferentes fallas realizadas en la máquina de inducción
tienen por objeto comprobar la validez del modelo matemático.
Por limitaciones de laboratorio se hace imposible establecer un
ángulo de falla preciso, sea en la corriente o en el voltaje,
para obtener las formas de onda de las distintas variables del
sistema y realizar una comparación más acertada.
3.2.1 FALLA: CORTOCIRCUITO TRIFÁSICO.
En la figura 3.1 se muestran los diagramas de control y
fuerza utilizados para la realización de la falla, con el
generador en vacio, voltaje trifásico balanceado fase-neutro de
220 voltios , conexión del estator en estrella con capacitores
conectados a la entrada del generador. Para la obtención de los
oscilogramas el disparo del osciloscopio se lo realiza en forma
manual.
CONTROL FUERZA
a
ci
",
•O*L DC CgfVUDfTC
Ct
nn r*~]
~c
J0 .
i<f 1' T
FIG 3.1 Diagramas de los circuitos de control y fuerza para
producir cortocircuito trifásico.
80
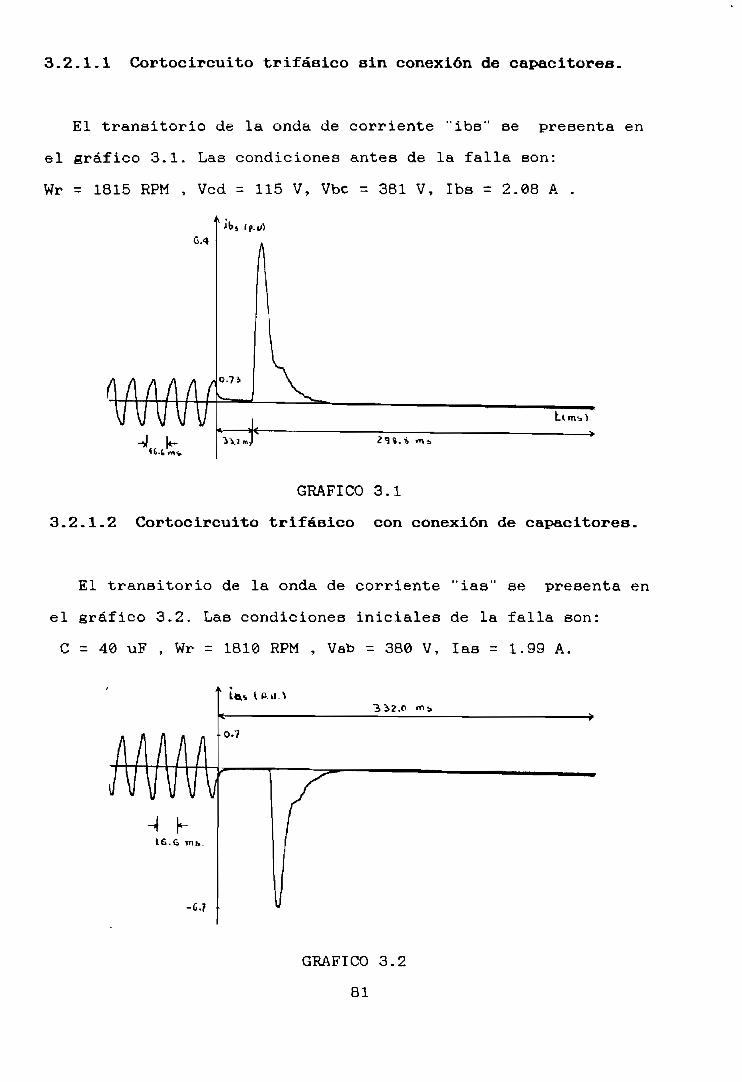
3.2.1.1 Cortocircuito trifásico sin conexión de capacitores.
El transitorio de la onda de corriente "ibs" se presenta en
el gráfico 3.1. Las condiciones antes de la falla son:
Wr = 1815 RPM , Ved = 115 V, Vbc = 381 V, Ibs = 2.08 A .
Ip.trt
GRÁFICO 3.1
3.2.1.2 Cortocircuito trifásico con conexión de capacitores.
El transitorio de la onda de corriente "las" se presenta en
el gráfico 3.2. Las condiciones iniciales de la falla son:
C = 40 uF , Wr = 1810 RPM , Vab - 380 V, las = 1.99 A.
0.7
-6.7
GRÁFICO 3.2
81
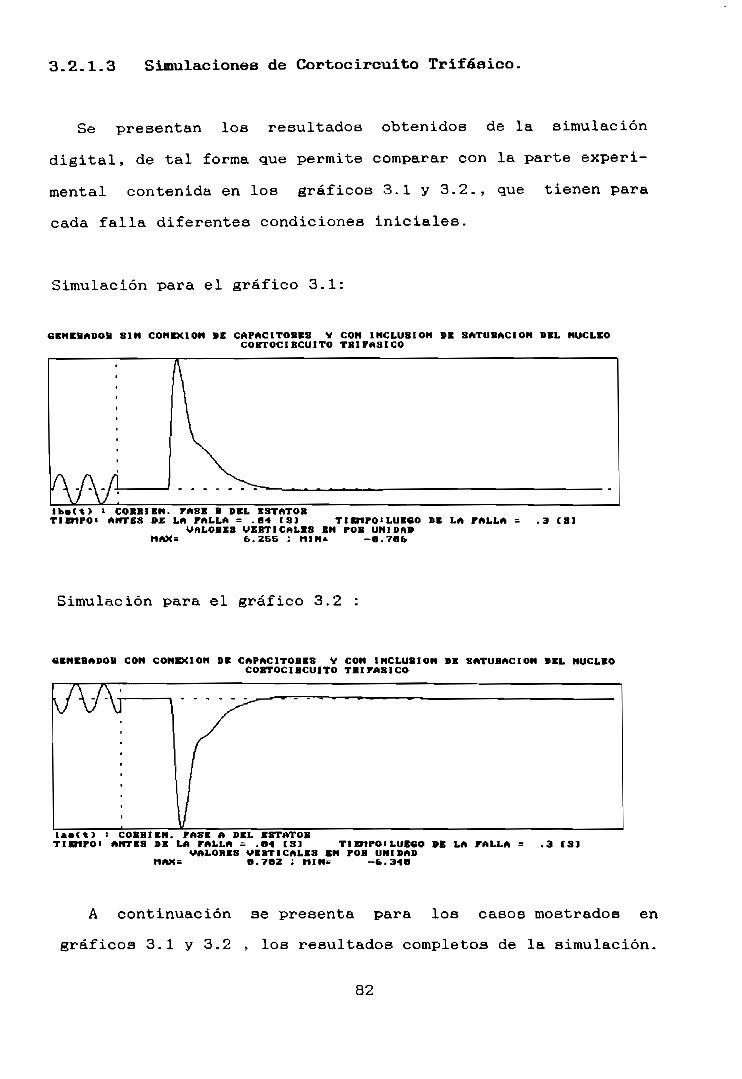
3.2.1.3 Simulaciones de Cortocircuito Trifásico.
Se presentan los resultados obtenidos de la simulación
digital, de tal forma que permite comparar con la parte experi-
mental contenida en los gráficos 3.1 y 3.2., que tienen para
cada falla diferentes condiciones iniciales.
Simulación para el gráfico 3.1:
GENEBADOB SIN CONEXIÓN DE CAPACITOBES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO TRIFÁSICO
l b » < t > i COBBIEN. FASE • DEL ESTATORTIEMPO! ANTES DE LA FALLA = . fl4 fSJ TI EflPOl LUE«O DE LA FALLA =
VALOBE8 VERTICALES EN POB UNIDADHAX= 6.Z5B ; M1N- -B,7Ob
. 3 131
Simulación para el gráfico 3.2
GENERADOR CON CONEXIÓN DE CAPACITOBES Y CON INCLUSIÓN DE SATUBACION DEL NÚCLEOCOBTOCIBCUITO TRIFÁSICO
\AAr
!*•<*> i COBBIEN. FASE A DEL ESTATOBANTES DE LA PALLA - .Oí 131 TIEMPOILUEGO DE LA FALLA =
VALORES MBBT1 CALES BN POB UNIDAD«AX= O.7O2 ; »1IH= -6.34B
.3 ÍSI
A continuación se presenta para los casos mostrados en
gráficos 3.1 y 3.2 » los resultados completos de la simulación.
82

Simulaciones para la sección 3.2.1.1
GENERADOS 8IH CONEXIÓN DE CAPACIT08ES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO TBIFÁSICO
l*«(t) l CORRÍ EN. FASE A DEL ESTATOR v*«(t) i UOLTAJE FASE A DEL ESTATORTIEMPO: ANTES DE LA FALLA = .04 [SJ TIEMPO-* LUEGO DE LA FALLA = .3 [SI
UALORfiS UERTICALES EN POR UNIDADMAX= a.7ia ; niN= -4.833 HAX= 1.411 ; MIN= -1.412
GEHEBADOB SIN CONEXIÓN DE CAPACITORES V COM'trtCWJSí-OM" DE -&rtTtlBAC!OM DEL NÚCLEOCORTOCIRCUITO TBI FASICO
it»<t) i CORRIEN. FASE B DEL ESTATOR ubcCt) i UOLTAJE FASE B DEL ESTATORTIEMPO: ANTES DE LA FALLA = .64 CSJ TIEMPO: LUEGO DE LA FALLA = .3 (Si
UALOBES UERTICALES EN POH UNIDADMAX= t.ZSS : MIN= -8.766 HAX= 1.414 ; MIN= -1.414
GENEBADOR SIN CONEXIÓN DE CftPftCITOBES V CGtt 'fHCL*U*I-OH-DE' -fifínTUBACIOH DEL NÚCLEOCOBTOCIBCUITO TRIFÁSICO
lc»(t) i CORBIEN. FASE C DEL ESTATOR wccít) i UOLTAJE FASE C DEL ESTATORTIEMPO: ftMTEC DE LA FALLA = .64 CSJ TIEMPO: LUEGO DE LA FALLA = .3 (SJ
UALOBES UERTICALES EN POR UNIDADHAX= fl.793 : MIN= -3.361 HAX= 1.414 : MIN= -1.4B7
83
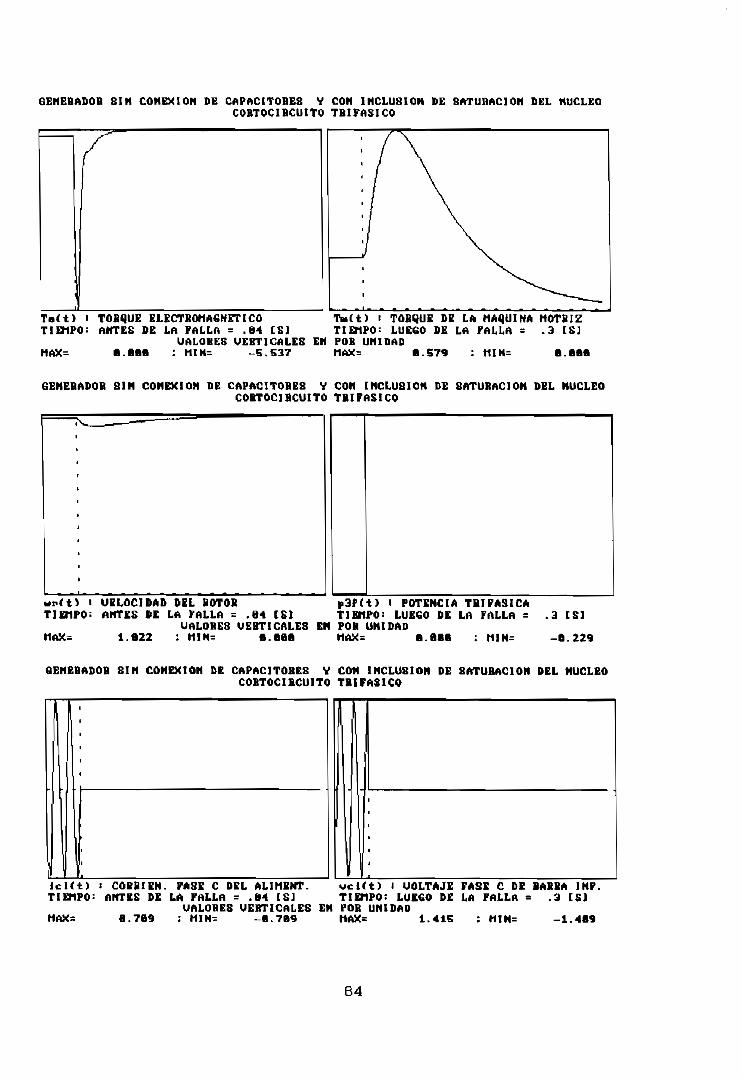
GENERADOR SIN COHEXION DE CAPACITORES V COH INCLUSIÓN BE SATURACIÓN BEL NÚCLEOCOBTOCIBCUITO TRIFÁSICO
Teít) i TORQUE ELECTROMAGNÉTICO Twít) l TOBQUE DE LA MAQUINA MOTRIZTIEMPO: flHTES BE LA FALLA = .04 CSJ TIEMPO: LUEGO DE LA FALLA = .3 CSJ
UALOHES VERTICALES EN POB UNIDADMAX= a.ftfla : MIN= -5.537 MAX= B.579 : »IN= a.ABÉ
GEHEBADOB SIN COHEXION DE CftPACITOBES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO TRIFÁSICO
1
1
1
1
1
1
1
t
1
wn<ü i UELOCIDAD DEL BOTOB P3Pít) l POTENCIA TRIFÁSICAT1ET1PO: ANTES DE LA FALLA = .04 (SI TIEMPO: LUEGO DE LA FALLA = .3 ESI
UALORES VERTICALES EH POB UNIDADHAX= 1.822 : HIN= a.aaa HAX= a. asa ; MIH= -e. 229
GENERADOR SIN COHEXIOH DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO TRIFÁSICO
Iclít) i CORBIEN. FASE C DEL ALIHENT. vci(t) I UOLTAJE FASE C DE BARBA INF.TIEMPO: ANTES DC LA FALLA = .04 m TIEMPO: LUEGO DE LA FALLA = .3 tSJ
UALORES VERTICALES EN POR UNIDADMAX= a.789 ; MIN= -B.789 MAX* 1.416 ; HIN= -1.489
64
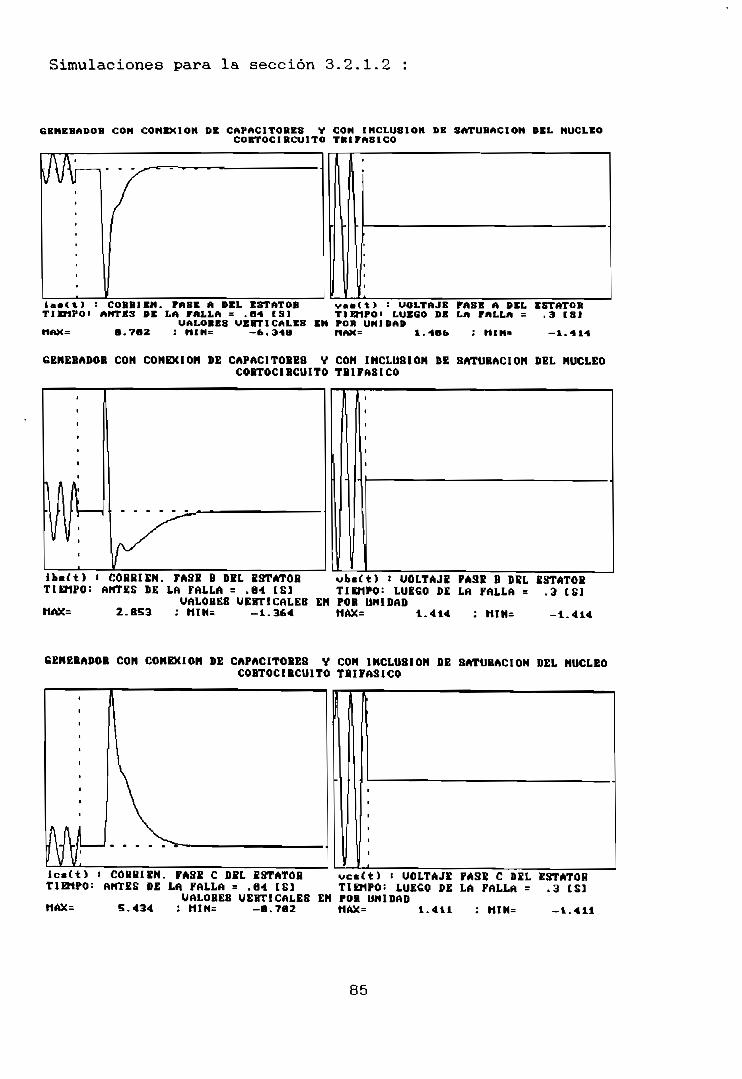
Simulaciones para la sección 3.2.1.2
GENERADOR COM CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO TRIFÁSICO
!*•<*>TIEMPO i
: CORRIEH. FASE A DEL ESTATOR v«»(t> : UOLTAJE FASE A DEL ESTATORANTES DE LA FALLA = . H4 fSI TIEMPO' LUEGO DE LA FALLA = .3 133
VALORES VERTÍ CALES EN POR UNIDADi «IN= -b.a-iB MAX= i.«eb ; MIH= -
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE 3ATUBACION DEL NÚCLEOCOBTOCIECUITO TBI FASICO
ib.ít) i CORRÍ EN. FASE B DEL ESTATOR vfc.ít) i UOLTAJE FASE B DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 [£] TIEMPO: LUEGO DE LA FALLA = .3 tSJ
UALOBE8 UEBTICALES EN POR UNIDADHAX= 2.8S3 : HtH= -1.364 HAX= 1.414 ; MIN- -1.414
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO TRIFÁSICO
lc.(t) i CORRÍ EN. PASE C DEL ESTATOR vccCt) i UOLTAJE FASE C DEL ESTATOBTIEMPO: ANTES DE LA FALLA = .64 t£J TIEMPO: LUEGO DE LA FALLA = .3 ES)
VALORES UEBTICALES EN POR UNIDADMAX= 5.434 : MIN= -B.7«2 MAX= 1.411 : MIN= -1.411
85
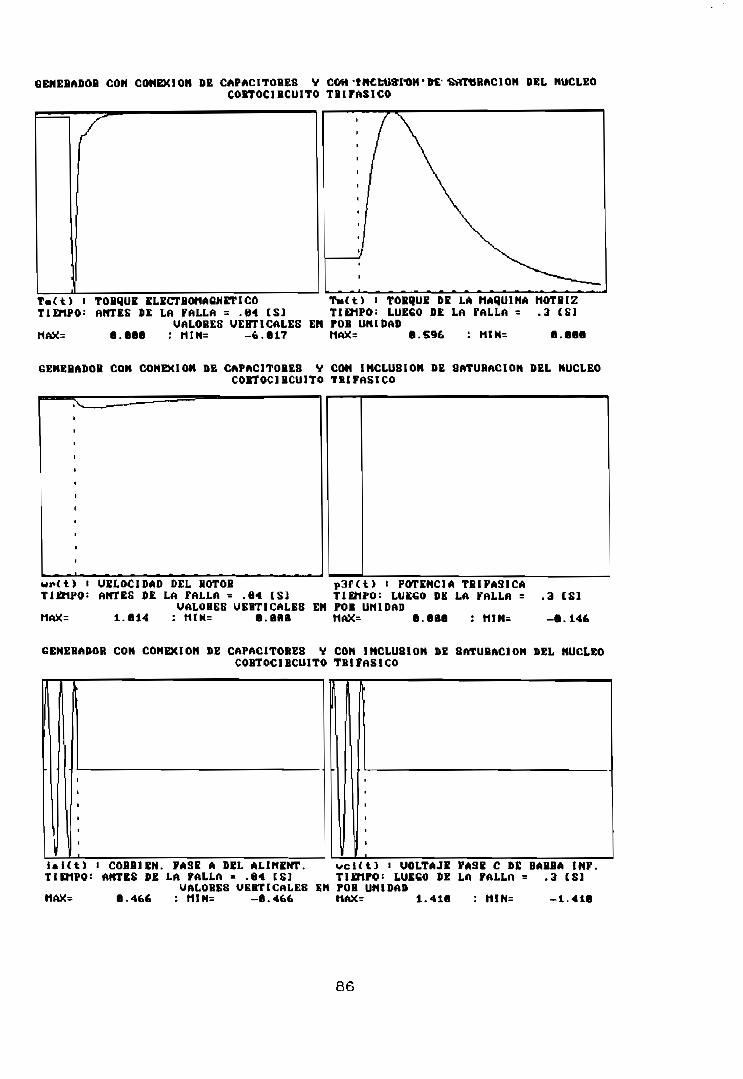
GENERADOR CON CON EX I OH DE CAPACITORES V CÜH •tNCtU9¡-OM>D£"SATURACION DEL HUCLEOCORTOCIRCUITO TRIFÁSICO
T«(t) i TORQUE ELECTROMAGNÉTICO Tutt) i TORQUE DE LA MAQUINA MOTRIZTIEtIPO: ANTES DE LA FALLA = .04 (SI TIEMPO: LUEGO DE LA FALLA = .3 tSJ
VALORES YEBTICALES EN POR UNIDADMAX= B.flBfl : MIN= -6.017 MAX= 0.S9C, : HIN= 0.000
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO TRIFÁSICO
wi*(t> i UKLOCIDAD DEL ROTOR P3f(t) t POTENCIA TRIFÁSICATIEMPO: ANTES DE LA FALLA = .84 (SI TlEtlFO: LUfiGO DE Lfl FALLA = .3 CS1
UALOREB UEHTICALE8 EN POR UNIDAD1.014 ; HIN= B.ana HAX= a.flae : tiiN= -«.146
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL HUCLEOCORTOCIRCUITO TRIFÁSICO
UUt) i CORRIEN. FASE A DEL ALINENT. vcUt) i UOLTAJE FASE C DE BARRA INF.TIIÍIPO: ANTES DE LA FALLA = .04 CS1 TIEMPO: LUEGO DE LA FALLA = .3 (SI
UALORES UEBTICALES EN POR UNIDADHAX= «.466 ; HIN= -8.466 HñX= 1.410 : HIN= -1.410
86
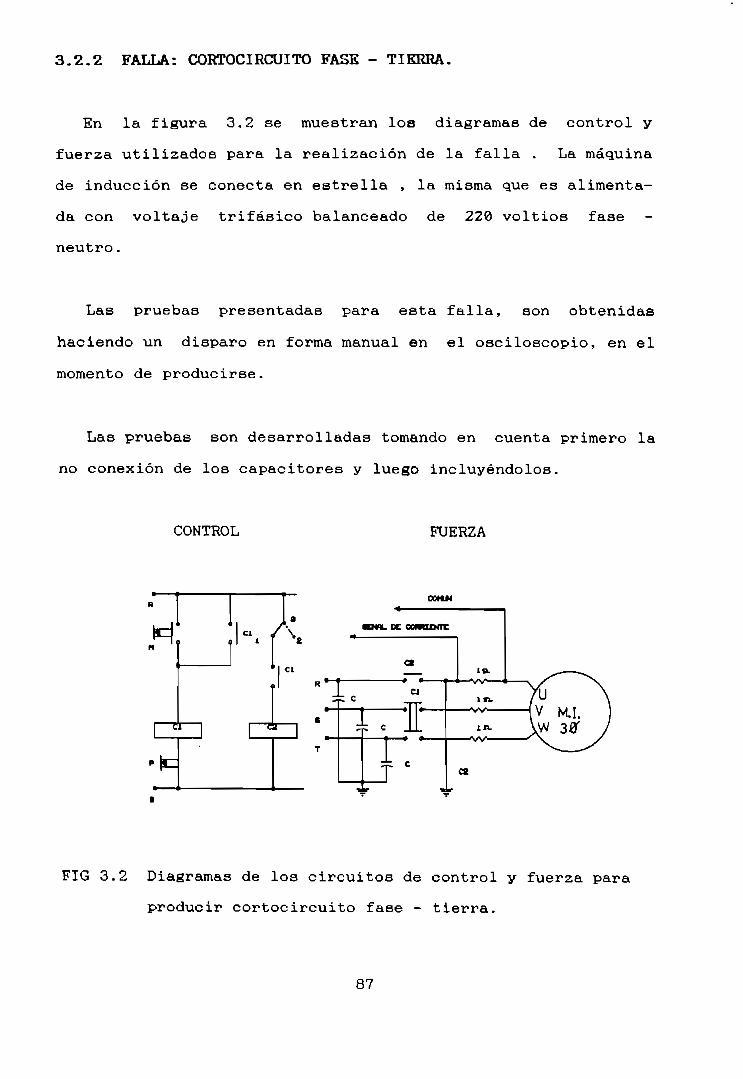
3.2.2 FALLA: CORTOCIRCUITO FASE - TIERRA.
En la figura 3.2 se muestran los diagramas de control y
fuerza utilizados para la realización de la falla . La máquina
de inducción se conecta en estrella , la misma que es alimenta-
da con voltaje trifásico balanceado de 220 voltios fase
neutro.
Las pruebas presentadas para esta falla, son obtenidas
haciendo un disparo en forma manual en el osciloscopio, en el
momento de producirse.
Las pruebas son desarrolladas tomando en cuenta primero la
no conexión de los capacitores y luego incluyéndolos.
CONTROL FUERZA
00*1*1
«NAL CC COMUNTE
•• z c
-^ c _
i;T
FIG 3.2 Diagramas de los circuitos de control y fuerza para
producir cortocircuito fase - tierra.
87
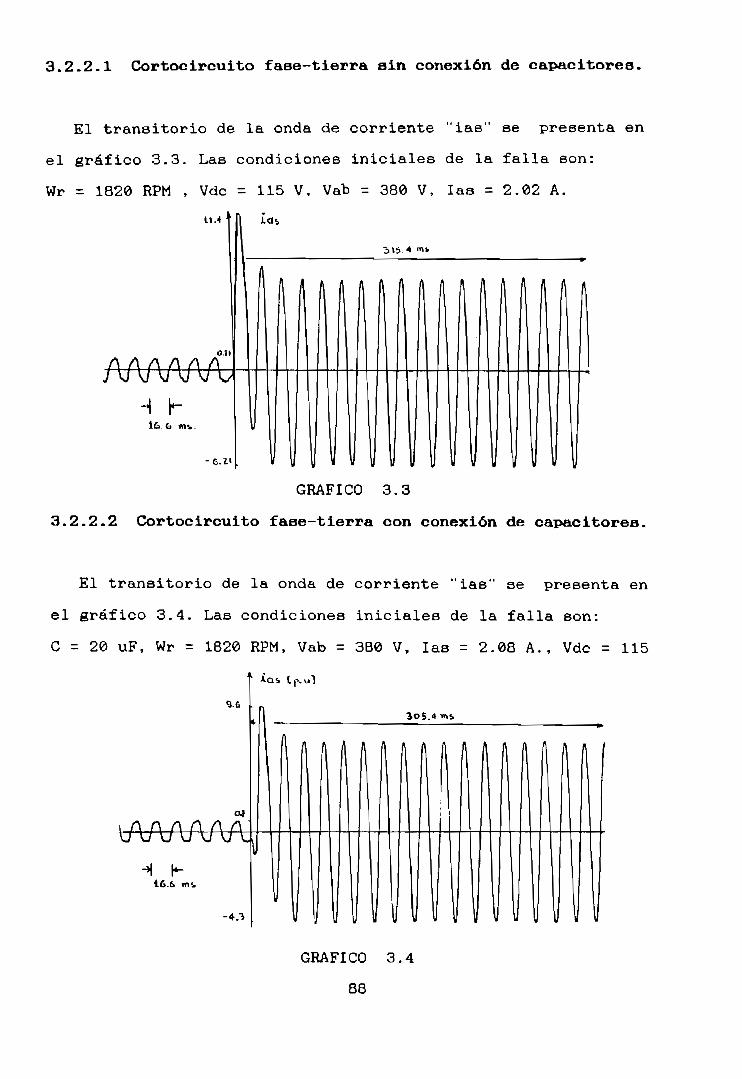
3.2.2.1 Cortocircuito fase-tierra sin conexión de capacitores.
El transitorio de la onda de corriente "ias" se presenta en
el gráfico 3.3. Las condiciones iniciales de la falla son:
Wr = 1820 RPM , Vdc = 115 V, Vab = 380 V, las = 2.02 A.
u.4
AAA/Wl^ i-16. C. «i
GRÁFICO 3.3
3.2.2.2 Cortocircuito fase-tierra con conexión de capacitores.
El transitorio de la onda de corriente "ias" se presenta en
el gráfico 3.4. Las condiciones iniciales de la falla son:
C = 20 uF, Wr = 1820 RPM, Vab = 380 V, las = 2-08 A., Vdc = 115
9.6
lAAAAAA.h
16. 6
Cp.
GRÁFICO 3.4
88
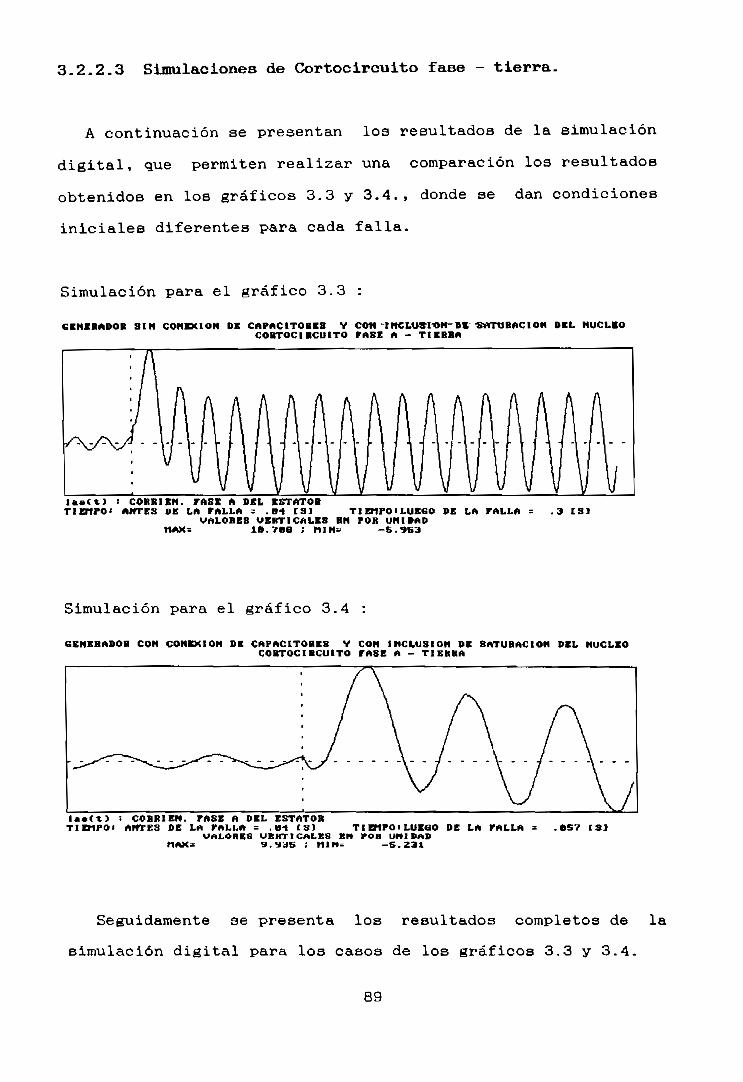
3.2.2.3 Simulaciones de Cortocircuito fase - tierra.
A continuación se presentan los resultados de la simulación
digital, que permiten realizar una comparación los resultados
obtenidos en los gráficos 3.3 y 3.4., donde se dan condiciones
iniciales diferentes para cada falla.
Simulación para el gráfico 3.3
GENERADOS StH CONEXIÓN DE CAPACITORES V COtí ~IHCLtWON- BK -SATURACIÓN BEL NÚCLEOCOBTOCIBCUITO PASE A - TIERRA
l*«(t) i CORRÍ EN. FASE A DEL ESTATORANTES DE LA PALLA = .01 [91 TlEflPOiLUEfiO PC LA PALLA =
VALOBES VERTICALES EN POB UNIDAPHAX= 16.708 ; MIH- -& , 963
.3 [SI
Simulación para el gráfico 3.4 :
GENERAPOR CON CONEXIÓN PE CAPACITORES Y CON INCLUSIÓN DE SATUBACIOH DEL NÚCLEOCORTOCIRCUITO FASE A - TIERRA
: COBRIEN. PASE A DEL ESTATORTIETIPCH ANTES DE LA PALLA = . «•* CS1 TIEHPO i LUC6O DE LA PALLA =
VALORES URBTICAL.KS EN POB UM1PAVMAX= S.93S ; H1N= -G.231
.BS7 CS1
Seguidamente se presenta los resultados completos de la
simulación digital para los casos de los gráficos 3.3 y 3.4.
89
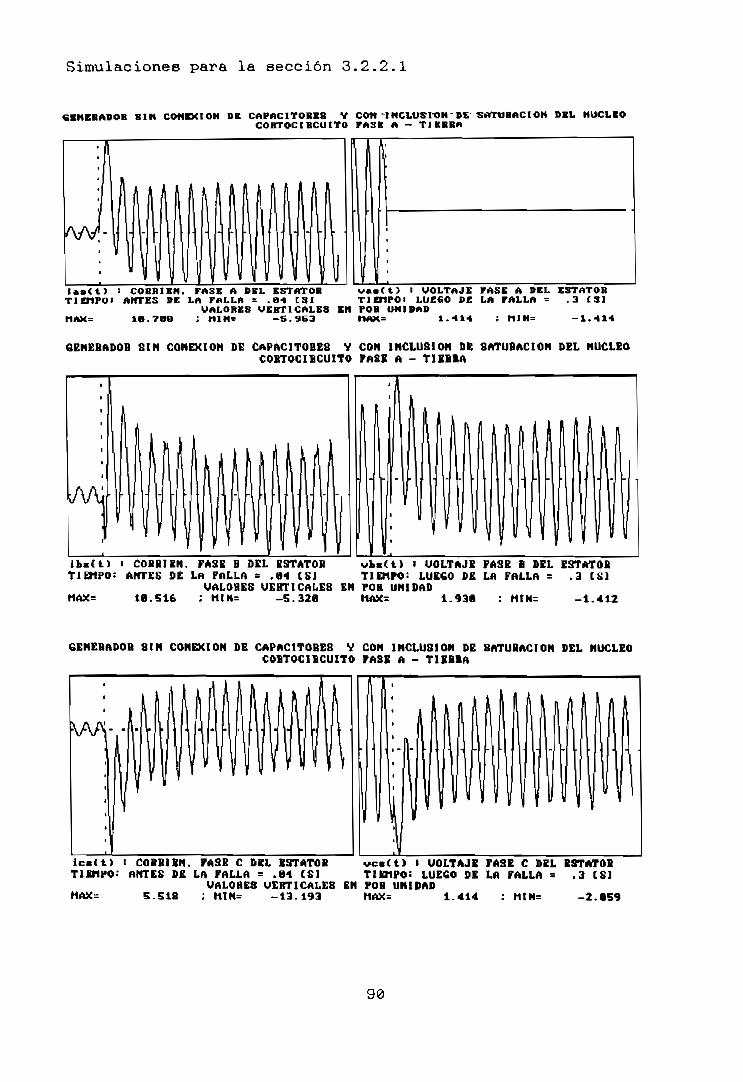
Simulaciones para la sección 3.2.2.1
GENEBADOB SIN CONEXIÓN DE CAPACITOBE8 V COtt INCUICTOH' 6K SrfTUBACION DEL NÚCLEOCOBTOCIBCUITO FASE A - TIEBBA
l*s<t) : COBRIEN. FASE A DEL ESTATOB v*«(t) l VOLTAJE FASE A PEL ESTATORTIEMPO» ANTES DÉ LA FALLA - . B-l [33 TIET1PO1 LUEGO DE LA FALLA = .3 133
VALORES VERTICALES EN FOB UN1B-ADMAX= IB.?ee ; MIH= -s.s&a HAX= 1.4H ; mu- -1.414
6ENERADOB SIN CONEXIÓN DE CAPftCITOBES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO PftSK A - TIEBlA
lh«(t) i CORRIEN. FASE B DEL ESTATOB wh.ít) i UOLTAJE FASE B DEL ESTATORTIÜIPO: ANTES DE Lfl FflLLft = .04 [SJ TIEMPO: LUEGO DE Lfl FALLA = .3 tÜJ
UALOHES UEHTICALES EN POR UNIDADHAX= 18.S16 : MIN= -5.320 HAX= 1.93B : MIH- -1.412
GEHEBADOB 81N CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO FASE A - TIEBftA
ic.ít) l CORRÍ EN. FASE C DEL ESTATOB vccCt) l UOLTAJE FASE C DEL ESTATOBANTES DE LA FALLA = .84 [S] TI HIPO: LUEGO DE LA FALLA = .3 (SI
UALORES UERTICALES EN POB UNIDAD5.518 ; HIN= -13.193 HAX= 1.414 : MIH= -2.K9
90
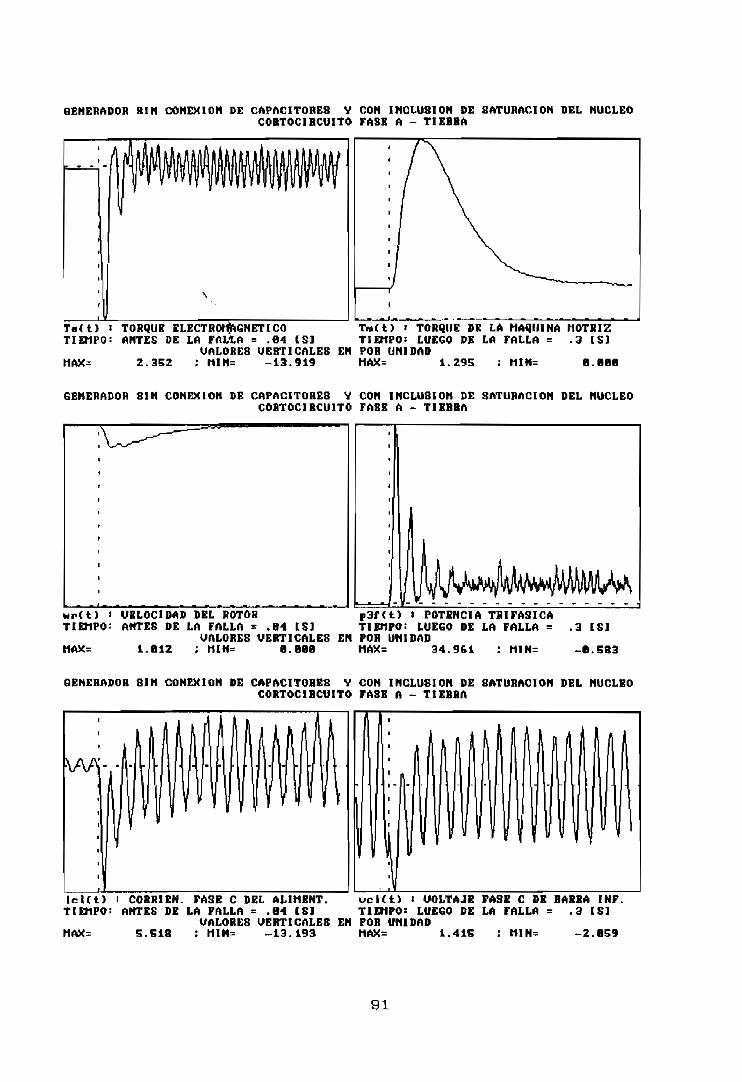
GENERADOR SIH CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - TIERRA
Te<t> i TOHQUE ELECTROMAGNÉTICO Tw(t> i TORQUE DE LA MAQUINA MOTRIZTIEMPO: fíNTES DE LA FALlA = .84 ISJ TIEMPO: LUEGO DE LA FALLA - .3 tS)
VALORES VERTICALES EN POR UNIDADMAX= 2.352 : HIN= -13.919 MñX= 1.295 ; MIN= 0.000
GENERADOR SIN CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - TIERRA
wp(t) i VELOCIDAD DEL ROTOR P3f(t) t POTENCIA TRIFÁSICATIEMPO: ANTES DE LA FALLA = .04 [SI TIEMPO: LUEGO DE LA FALLA = .3 ESI
VALORES VERTICALES EN POR UNIDADMAX= 1.012 ; HIN= 8.8B8 MAX= 34.961 : MIN= -0.583
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - TIERRA
IcUt) i CORRIEN. FASE C DEL ALIHENT. ucl(t) ' VOLTAJE FASE C DE RARRA INF.TIEMPO: ANTES DE LA FALLA = .84 [SI TIEMPO: LUEGO DE LA FALLA = .3 ÍS]
VALORES VERTICALES EN POR UNIDADHAX= 5.618 : MIN= -13.193 HAX= 1.415 : H1N= -2.059
91
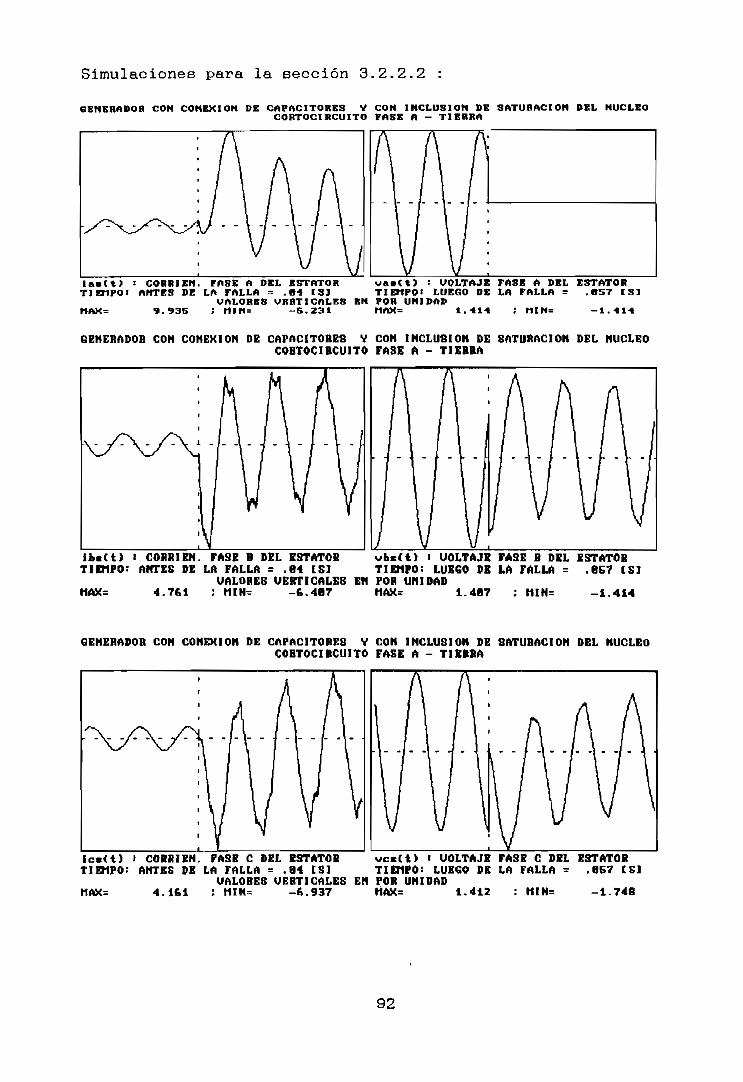
Simulaciones para la sección 3.2.2.2 :
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - TIERRA
la*(t> • CORRIEN FASE A DEL ESTATOR va«(t> • VOLTAJE FASE A DEL ESTATORTIEMPOi ANTES DE LA FALLA = .O* ISJ TIEMPO' LUEGO DE LA FALLA = .057 tSJ
VALORES VKRTICALES EN POR UNIDADMAX= 9.935 ; MIN~ -5.231 MrtX= 1.414 ; Hl N= -
GENERADOS COH CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATUBAC10N DEL NÚCLEOCOBTOCIRCUITO FASE A - TIERBA
IbtCt) i COBRIEN. FASE B DEL ESTATOR vhcft) » UOLTAJE FASE B DEL ESTATOBTIEMPO: ANTES DE LA FALLA = .84 tSJ TIEMPO: LUEGO DE LA FALLA = .657 CSI
VALORES VERTICALES EN POB UNIDADHAX= 4.761 : HINe -6.487 HAX= 1.4B7 ; HIH= -1.414
GENEBADOB CON CONEXIÓN DE CAPftCITOBEB V CON INCLUSIÓN DE 8ATUBACIOH DEL NÚCLEOCOBTOCIBCU1TO FASE A - TIKBBA
ic«(t) l CORBIEN. FASE C DEL ESTATOR vcc(t) ' UOLTAJE FASE C DEL ESTATORTIEHPQ: ANTES DE LA FALLA = .04 [SI TIEMPO: LUEGO DE LA FALLA = .097 CSI
UALOBES UERTICALES EN POR UNIDADMAX= 4.161 : MIN= -6.937 MAX= 1.412 : MIN= -1.748
92
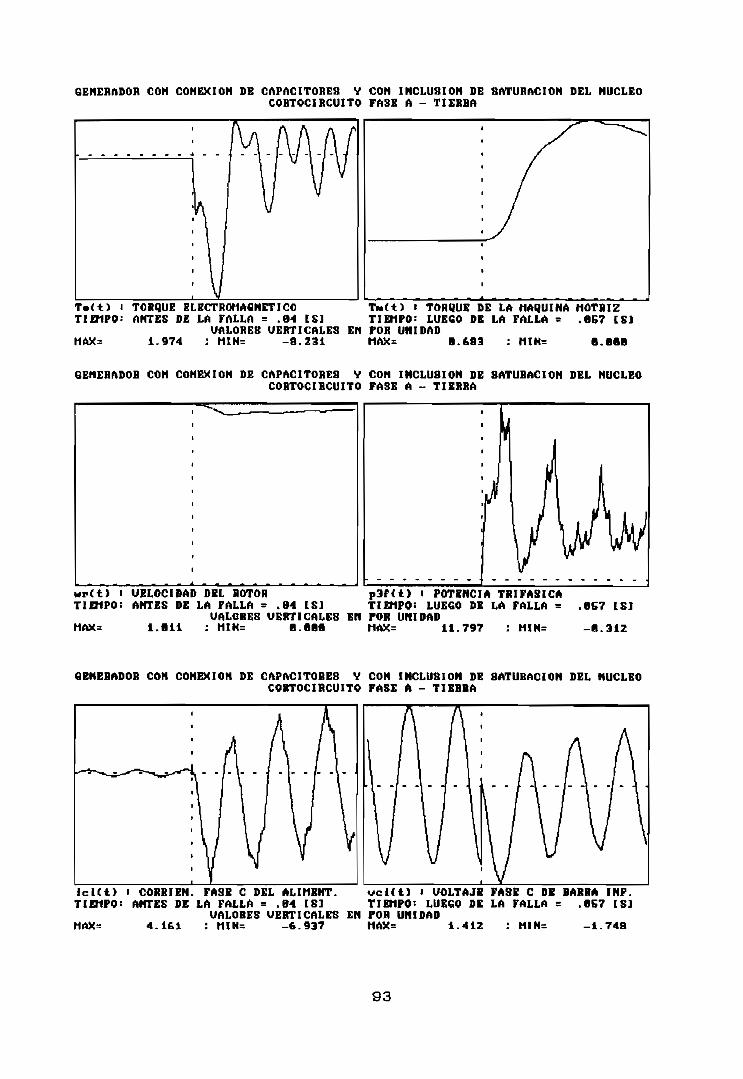
GENERADO» COK CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO FASE A - TIEBBA
T*<t) i TORflUE ELECTROMAGNÉTICO TM(Í) i TORQUE DE LA MAQUINA MOTRIZTIEMPO: ANTES DE LA FALLA = .84 [SI TIEMPO: LUEGO DE LA FALLA = .857 CSI
VALORES VERTICALES EN POR UNIDADMAX= 1.974 ; MXN= -9.231 MAX= B.&S3 : MIN= B.BBB
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO FASE A - TIEBBA
wp(t> i VELOCIDAD DEL ROTOR P3fít> i POTENCIA TRIFÁSICATIETIPO: ANTES DE LA FALLA = .84 tSJ TIEMPO: LUEGO DE LA FALLA = .867 [SI
VALORES VERTICALES EN POR UNIDADMAX= 1,611 ; MIN= B.BBB HAX= 11.797 ; HIN= -B.312
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - TIEBBA
lct(t) i CORRIEN. FASE C DEL ALIMBNT. vci(l) i VOLTAJE FASE C DE BARRA INF.TIEMPO: ANTES DE LA FALLA = .84 [SI TIEMPO: LUEGO DE LA FALLA = .857 [SI
VALORES VERTICALES EN POR UNIDADMAX= 4.161 : MIN= -6.937 MAX= 1.412 : MIN= -1.749
93

3.2.3 FALLA : CORTOCIRCUITO DOS FASES - TIERRA.
Para la realización de esta falla se implementaron los
circuitos de control y fuerza mostrados en la figura 3.3. La
máquina tiene el estator conectado en configuración estrella,
con alimentación de voltaje trifásico balanceado de 220 voltios
fase - neutro funcionando en vacio.
Para la obtención de loe oscilogramas el disparo del osci-
loscopio se lo realiza en forma manual. En el circuito de
fuerza se conectan los capacitores cuando se realiza la falla
con este elemento.
CONTROL FUERZA
SEJW_ ce conraom:
T
ca
Cl
r3fc C
„
COL
FIG. 3.3 Diagramas de los circuitos de conrol y fuerza
para producir cortocircuito dos fases - tierra.
94

3.2.3.1 Cortocircuito dos fases tierra sin capacitores.
El transitorio de la onda de corriente "ibs" se presenta en
el gráfico 3.5. Las condiciones iniciales de la falla son:
Wr = 1850, Vdc = 115 V, Vbc = 380 V, las = 2.05 A.
GRÁFICO 3.5
3.2.3.3 Cortocircuito dos fases tierra con capacitores.
El transitorio de la onda de corriente "ibs" se presenta en
el gráfico 3.6. Las condiciones iniciales de la falla son:
C - 20 uF Wr = 1810 RPM, Vdc - 113 V, Vbc = 380 V.Ibs = 2.05 A.
GRÁFICO 3.6
95
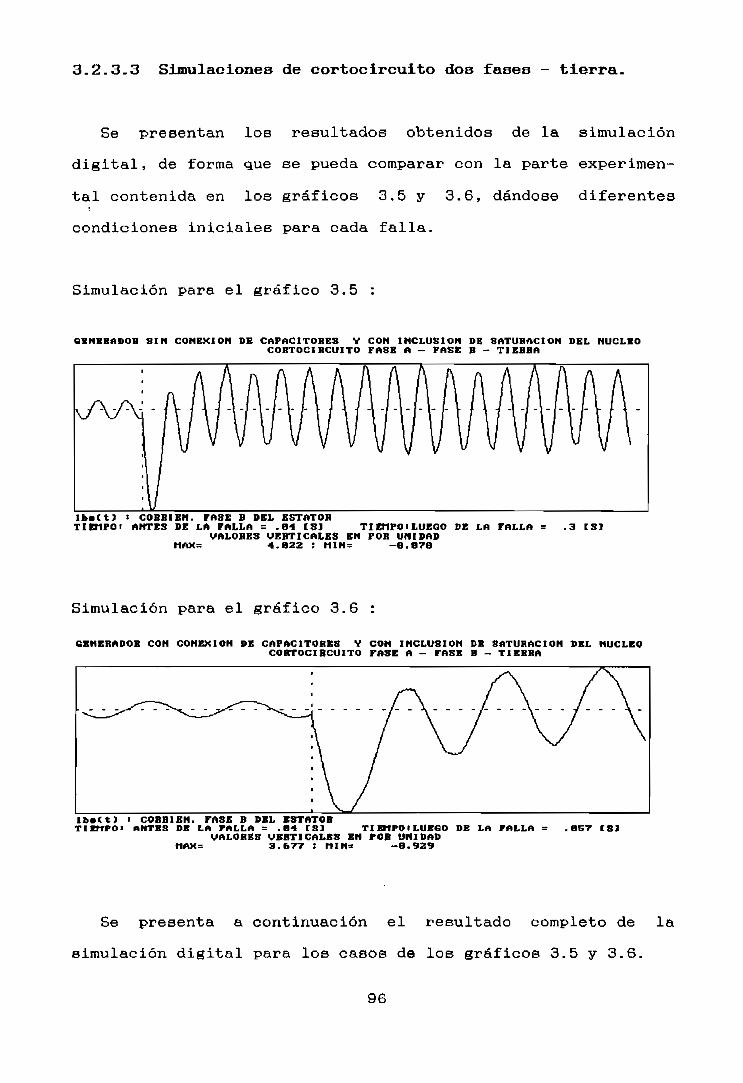
3.2.3.3 Simulaciones de cortocircuito dos fases - tierra.
Se presentan los resultados obtenidos de la simulación
digital, de forma que se pueda comparar con la parte experimen-
tal contenida en los gráficos 3.5 y 3.6, dándose diferentes
condiciones iniciales para cada falla.
Simulación para el gráfico 3.5 :
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
lfe»tt> ¡ COBBIEH. FASE B DEL ESTATORTI HIPO i ANTES DE LA FALLA = .84 CSJ TIEMPO'LUEGO DE LA FALLA =
VALORES VERTICALES EN POR UNIDADMAX= 4.B22 : MIN= -8.678
.3 ESI
Simulación para el gráfico 3.6 :
GENERADOR CON CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
tb»(t> i CORRÍ EN. FASE B DEL ESTATORTIEMPO• ANTES DE LA FALLA = .04 CS1 TIEMPOI LUEGO DE LA FALLA =
VALORES VERTICALES EN POR UNIDAD3.677 ; MIN= -8.929
.057 CSJ
Se presenta a continuación el resultado completo de la
simulación digital para los casos de los gráficos 3.5 y 3.6.
96
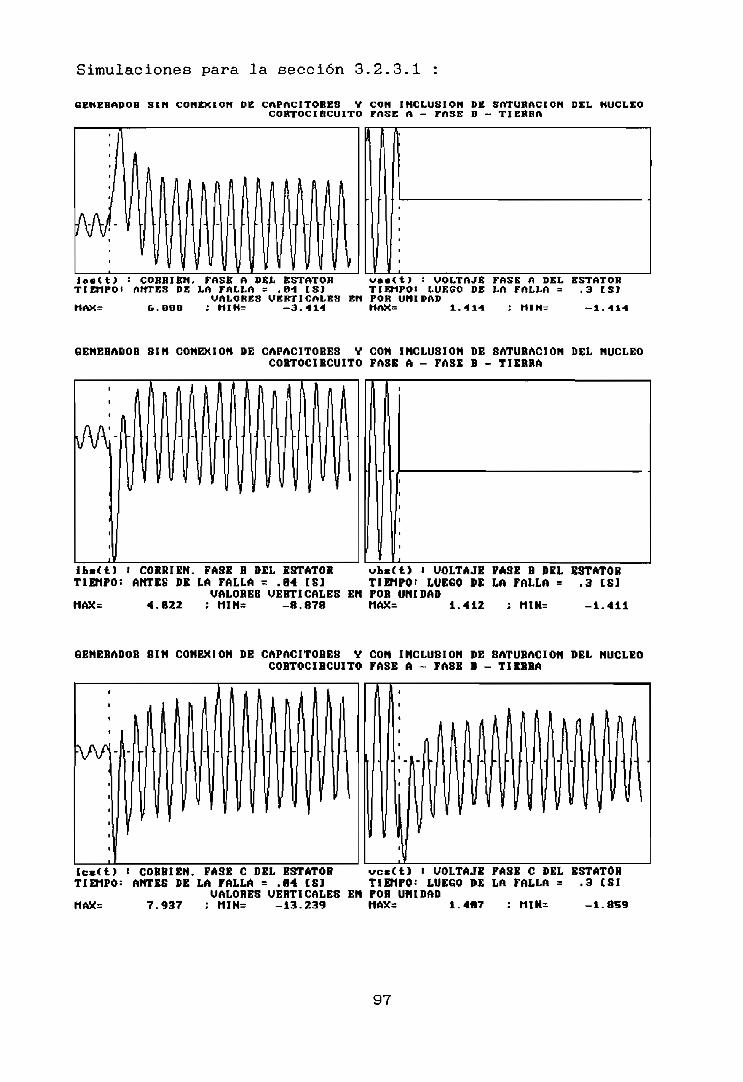
Simulaciones para la sección 3.2.3.1 :
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
la»(t) : COBRIEN. FASE A DEL ESTATOR vos(t) • VOLTAJE FASE A DEL ESTATORTI CUPOl ANTES DE LA FALLA = .84 tSJ TIEMFOl LUEGO DE LA FALLA = .3 ES]
VALORES VERTICALES En POR UNIDADMAX- &.B09 ; MIN= -3.414 MAX= 1.41-4 ¡ M1N- -1.414
GENERADOR 3IM COHEXIOH DE CAPACITORES V CON INCLUSIOH DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
U»«<t) i CORRÍ EN. FASE B DEL ESTATOR vhsít) i UOLTAJE PASE B DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 CSJ TIEMPO-' LUEGO DE LA FALLA = .3 tSJ
VALOREE VERTICALES EN POR UNIDADHAX= 4.822 ; MIN= -8.878 HAX= 1.412 ; MIN= -1.411
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
ic*(t> i CORRÍ EN. FASE C DEL ESTATOR vcs(t) l UOLTAJE FASE C DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 CSJ TIEMPO-' LUEGO DE LA FALLA = .3 CS3
UALORES VERTICALES EN POR UNIDADMftX= 7.937 : MIN= -13.239 MAX= 1.487 : MIN= -1.859
97
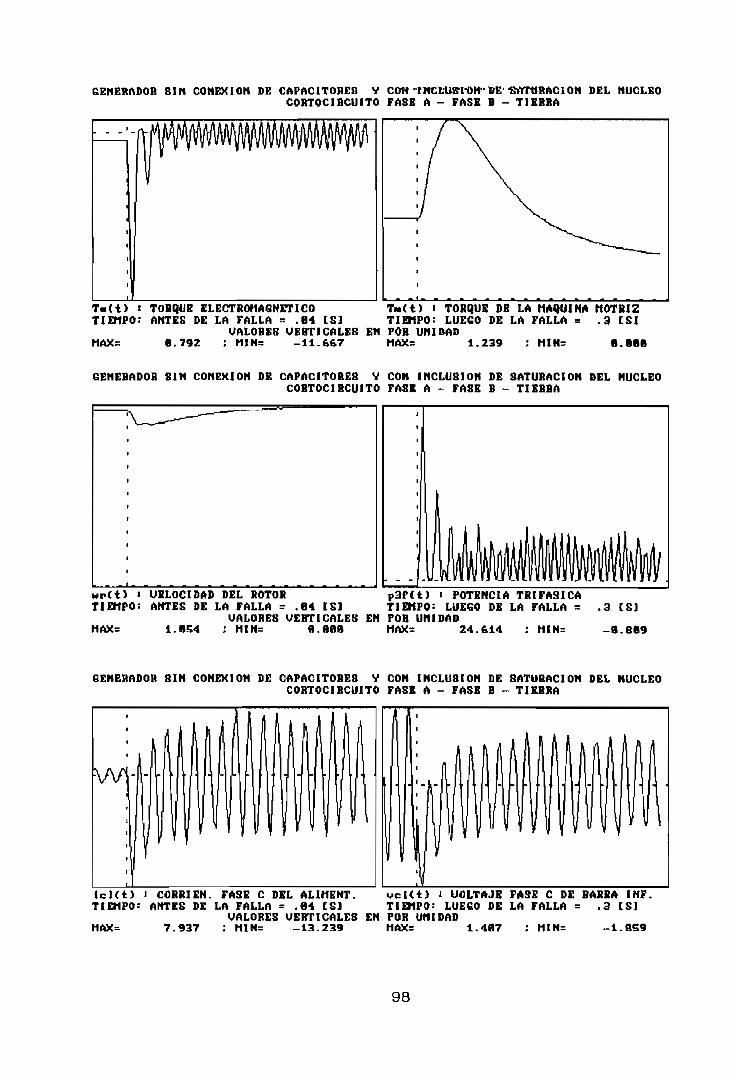
GENERADOR 8 I H CONEXIÓN DE CAPACITORES Y COH ~1 NCtlHffMW'DE1 «flTttB ACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE R - TIERRA
TaCt) i TORQ.UE ELECTROMAGNÉTICO Trn(t) i TORQUE DE LA MAQUINA MOTRIZTIEMPO: ANTES DE LA FALLA = .84 CS3 TIEMPO: LUEGO DE LA FALLA = .3 CS1
VALORES VERTÍ CALES EN POR UNIDADHAX= 0.792 ; HIN- -11.667 MAX= 1.239 : M1N= fl.000
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASK A - FASE R - TIERRA
wp<t> i UELOCXDAD DEL ROTOR p3P<t> i POTENCIA TRIFÁSICATIEMPO: ANTES DE LA FALLA = .04 IS1 TIEMPO: LUEGO DE LA FALLA = .3 ISJ
VALORES VERTICALES EN POR UNIDADMAX= 1.054 ; MIN= 0.000 MAX? 24.614 : MIN= -0.809
GENERADOR SIN CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
IcUt) i CORRIEN. FASE C DEL ALIMENT. vciCt) i UOLTAJE FASE C DE BARRA INF.TIEMPO: ANTES DE LA FALLA = .04 ESI TIEMPO: LUEGO DE LA FALLA = .3 ES]
VALORES VERTICALES EN POR UNIDADMAX= 7.937 ; MIN= -13.239 MAX= 1.407 : MIN= -1.8S9
98
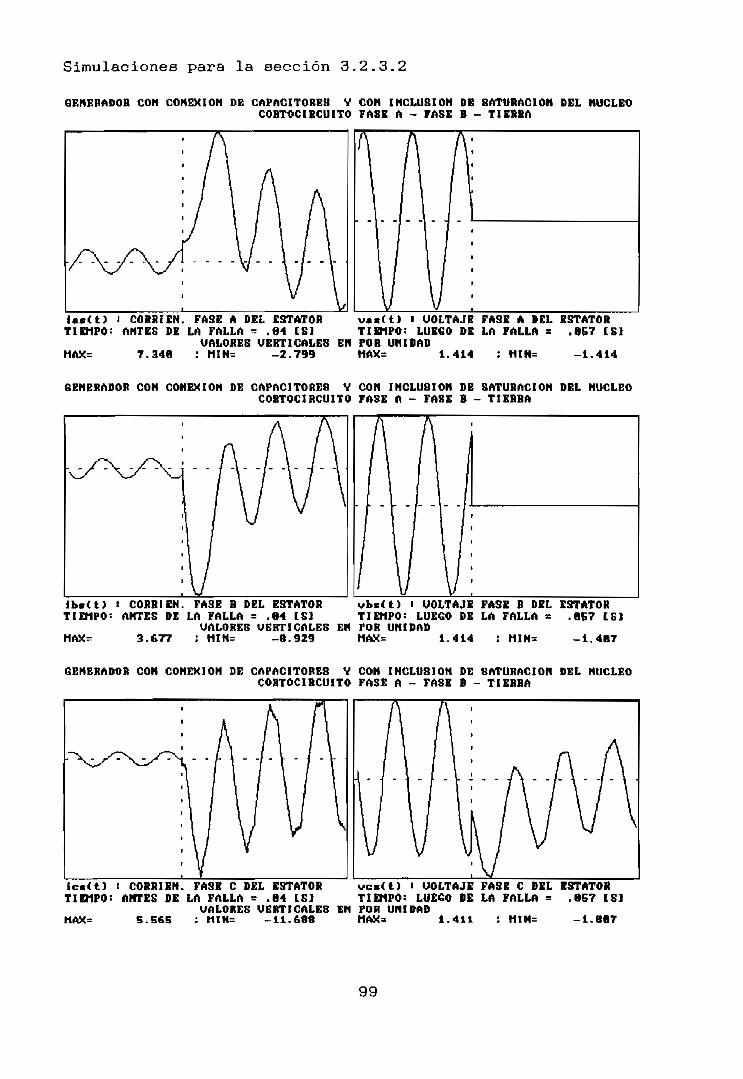
Simulaciones para la sección 3.2.3.2
GEHERADOB COK CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIEBHA
U«(t) i CORRIEN. FASE A DEL ESTATOR vam(t) l UOLTAJE FASE A DEL ESTATORTIEMPO: ANTES DE LA FALLA = .64 (SI TIEMPO: LUEGO DE LA FALLA = .867 m
UALORES VERTICALES EN POR UNIDADMAX= 7.348 : MIN= -2.799 MAX= 1.414 ; MIN= -1.414
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE D - TIERRA
Ib«(t) i CORRIEN. FASE B DEL ESTATOR vbc(t) ' UOLTAJE FASE B DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 tSJ TIEMPO: LUEGO DE LA FALLA = .857 (SI
VALORES VERTICALES EN POR UNIDADMAX= 3.¿77 ; MIN= -tt.929 MAX= 1.414 ; MIN= -1.487
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIERRA
lcc(t) i CORRIEN. FASE C DEL ESTATOR vcc(t) ' UOLTAJE FASE C DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 LS3 TIEMPO: LUEGO DE LA FALLA = .857 CSJ
VALORES VERTICALES EN POR UNIDADMAX* 5.565 : MIN= -11.688 MAX= 1.411 : HIH= -1.8117
99
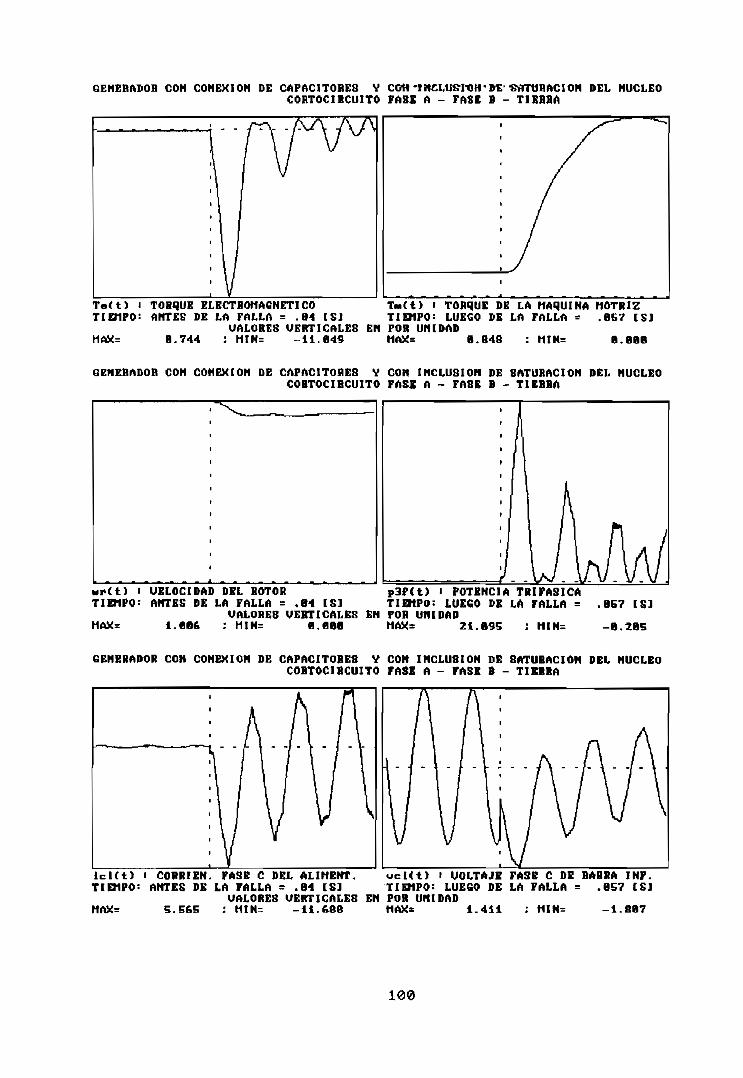
GENERADOS COH CONEXIÓN DE CAPACITORES V COH 1NCLU&roH-B'E"SVrnSRACION DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIEBBA
Teít) i TOBqUE ELECTROMAGNÉTICO TM(Í> ' TORQUE DE LA MAQUINA MOTRIZTIEMPO: ANTES DE LA FALLA = .04 tSJ TIEMPO: LUEGO DE LA FALLA = .067 (SI
VALORES VERTICALES EN POR UNIDADMAX= B.744 : MIN= -11.049 MAX= B.84B : MIN= 0.800
GENERADOR COH CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOCIBCUITO FASE A - FASE B - TIEBBA
ui*Ct) i VELOCIDAD DEL BOTOR P3F<t) i POTENCIA TRIFÁSICATIEMPO: ANTES DE LA FALLA = .84 tSJ TIEMPO: LUEGO DE LA FALLA = .857 (SJ
VALORES VERTICALES EN POR UNIDADMAX= 1.006 : HIN= 0.000 MAX= 21.095 ; MIN= -0.205
GENERADOR COH CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B - TIEBBA
lcl(t) i CORRIEN. FASE C DEL ALIHENT, ucUt) i VOLTAJE FASE C DE BARRA INF.TIEMPO: ANTES DE LA FALLA = .64 [SJ TIEMPO: LUEGO DE LA FALLA = .057 tfiJ
VALORES VERTICALES EN POR UNIDADMAX= 5.565 : MIN= -11.688 MAX= 1.411 ; MIN= -1.807
100

3.2.4 FALLA : CORTOCIRCUITO DOS FASES.
De igual forma para la realización de esta falla se imple-
menta loa circuitos de control y fuerza descritos en la figura
3.4. La máquina recibe una alimentación trifásica de voltaje
balanceado de 220 voltios fase - neutro, estando la configura-
ción del estator en conexión estrella con los terminales del
rotor cortocircuitados entre si.
En el momento de la falla el disparo del osciloscopio se lo
realiza en forma manual.
Para la realización de la falla se toma en cuenta el compor-
tamiento que tiene la falla cuando se incluye los capacitores.
CONTROL FUERZA
KNPL oe conRicwc
ce
_ r- c
Jf
_
U
1
c
; c
FIG. 3.4 Diagrama de los circuitos de control y fuersa para
producir cortocircuito dos fases.
101
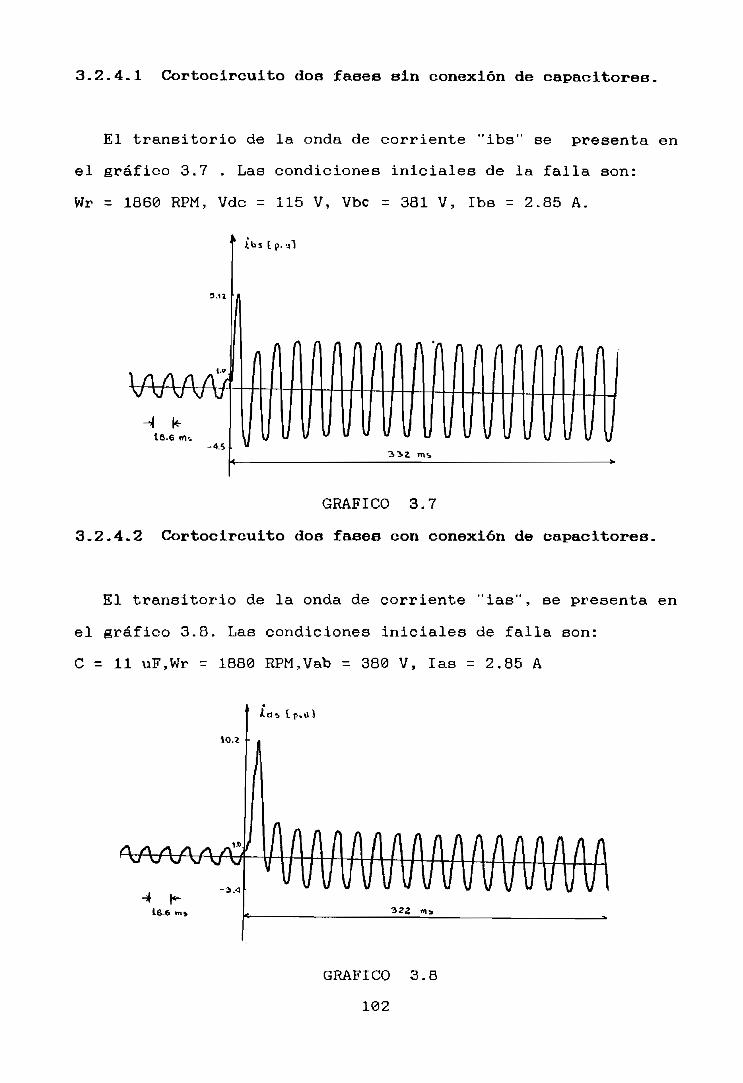
3.2.4.1 Cortocircuito dos fases sin conexión de capacitores.
El transitorio de la onda de corriente "ibs" se presenta en
el gráfico 3.7 . Las condiciones iniciales de la falla son:
Wr = 1860 RPM, Vdc = 115 V, Vbc - 381 V, Ibs = 2.85 A.
k-lñ-6 m-.
-4.5
f \ f \ { \ ( \ f \ f \ f \ t \ f \ f \L T f\ A f
GRÁFICO 3.7
3.2.4.2 Cortocircuito dos faaea con conexión de capacitores.
El transitorio de la onda de corriente "las", se presenta en
el gráfico 3.8. Las condiciones iniciales de falla son:
C = 11 uF,Wr = 1880 RPM,Vab = 380 V, las = 2.85 A
GRÁFICO 3.B
102

3.2.4.3 Simulaciones de cortocircuito doe fases-
A continuación se presenta los resultados de la simulación
digital, para realizar la respectiva comparación con los
obtenidos experimentaImente en los gráficos 3.7 y 3.8.
Simulación para el gráfico 3.7 :
GENERADOR Sin CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE R
lkw(t> ' CORRIEN. FASE B DEL ESTATORTIEMPO i ANTES DE LA PALLA - .84 ISJ TIEMPO'LUEGO DE LA FALLA
VALORES VERTICALES EN POB UNIDADMAX- 4.B3B ; MIH= -4.ase
.3 tS]
Simulación para el gráfico 3.8 :
GENERADOR CON CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
lA«Ct> : CORRIEN. FASE A DEL ESTATORTIEMPO i ANTES DE LA FALLA = .84 ES) TIEMPO'LUEGO DE LA FALLA =
VALORES VERTICALES EN POR UNIDAD1O.676 ;
.857 ES]
Seguidamente se detalla el resultado completo de la simula-
ción digital para los casos de las secciones 3.2.4.1 y 3.2.4.2,
103

Simulaciones para la sección 3.2.4.1 :
GENERADOR SIN GONEXIOH DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCOBTOC1BCUITO FASE A - FASE B
Ui(t) i CORRÍEH. FASE A DEL ESTATOR v*c(t) i UOLTAJE FASE A DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 CSJ TIEMPO: LUEGO DE LA FALLA = .3 IS3
VALORES VERTICALES EN POR UNIDADMAX= 4.369 : MIN= -S.783 MAX= 1.413 : MIN= -1.409
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
ib.(t) i CORRIEN. FASE B DEL ESTATOR vbs(t) i UOLTAJE FASE B DEL ESTATORTIEMPO: ANTES DE LA FALLA = .04 CS] TIEMPO' LUEGO DE LA FALLA = .3 [SI
VALORES VERTICALES EN POR UNIDADHAX= 4.938 ; HIN= -4.356 MAX= 1.414 ; MIN= -1.414
GENERADOR SIN CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
l»<t> i CORRIEN. FASE C DEL ESTATOR vcc(t) i VOLTAJE FASE C DEL ESTATORTIEMPO: ANTES DE LA FALLA = .04 CS] TIEMPO: LUEGO PE LA FALLA = .3 (SI
VALORES VERTICALES EN POR UNIDADHAX= 8.198 ; MIN= -5.424 HAX= 1.583 : HIN= -1.420
104
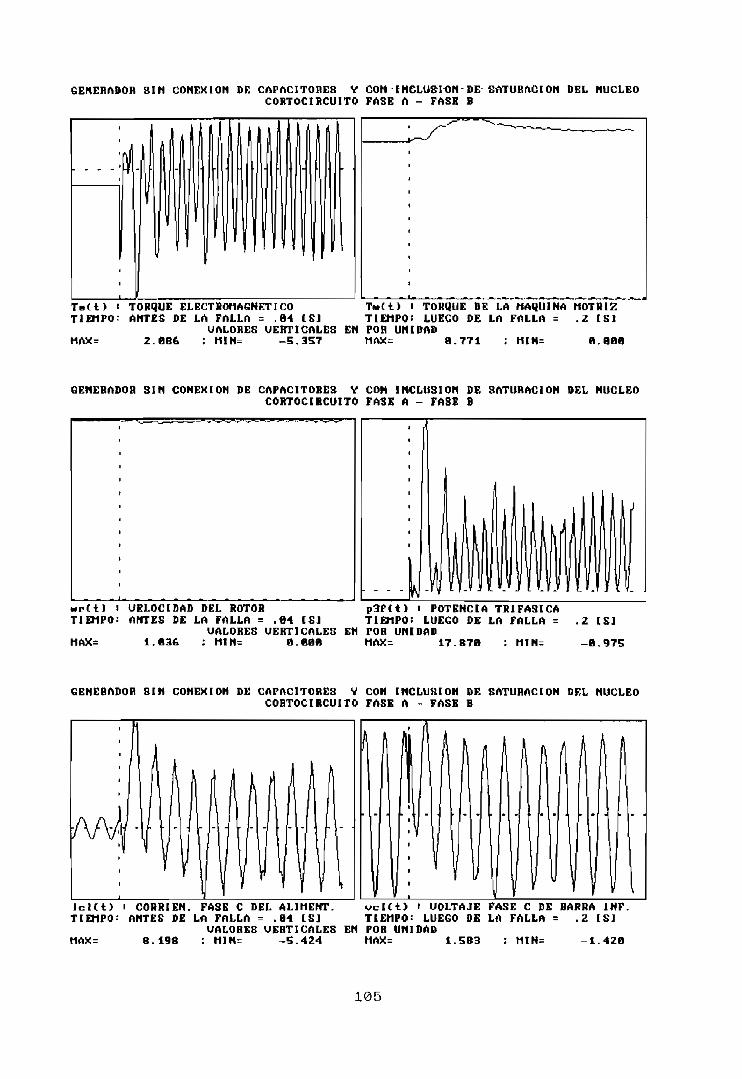
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
rt
T»(t) * TOHQUE ELECTROMAGNÉTICO Tnttt) i TORQUE DE LA MAQUINA MOTRIZTIEMPO: ANTES DE LA FALLA = .84 (SJ TIEMPO: LUEGO DE LA FALLA = .2 ISJ
VALORES VERTICALES EN POR UNIDADHAX= 2.B96 ; MIN= -5.357 MAX= 8.771 ; MIN= R.8BB
GENERADOR 3IM CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
wr(t) i UELOCIDAD DEL ROTOR P3P(t) > POTENCIA TRIFÁSICATIEMPO: flNTES DE LA FALLA = .04 CSJ TIEMPO: LUEGO DE LA FALLA = .2 CSJ
VALORES VERTICALES EN POR UNIDAD1.036 : MIN= a.aan MAX= 17.87B : MIN= -a.975
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
Icl(t) i CORRIEN. FASE C DEL AL1HEHT. uci(t> > VOLTAJE FASE C DE BARRA INF.TIEMPO: ANTES DE LA FALLA = .84 tSJ TIEMPO: LUEGO D£ LA FALLA = .2 (SJ
VALORES VERTICALES EN POR UNIDADMAX= 8.198 : HIN= -5.47.4 HAX= 1.583 : MIN= -1.4Z0
105
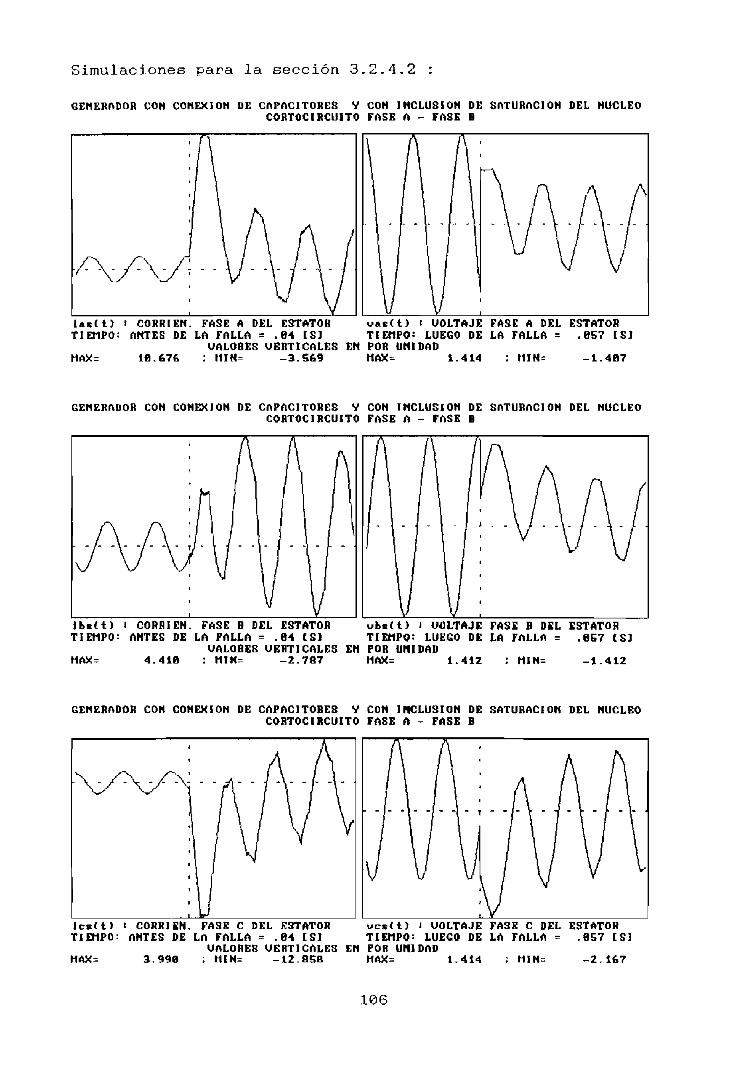
Simulaciones para la sección 3.2.4.2 :
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
las(t) i CORREEN. FASE A DEL ESTATOR v«e(t> : UOLTAJE FASE A DEL ESTATORTIEMPO: ANTES DE LA FALLA = .04 [SI TIEMPO-' LUEGO DE LA FALLA = .057 CSJ
UALOHES VERTICALES EN POR UNIDADHAX= 18.676 ; MIM= -3.569 MAX= 1.414 : MIN= -1.4B7
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
ibc(t) i CORRÍ EN. FASE B DEL ESTATOR vb*(t) ¡ UOLTAJE FASE B DEL ESTATORTIEMPO: ANTES DE LA FALLA = .84 tSl TIEMPO: LUEGO DE LA FALLA = .657 CSJ
UALORES VERTICALES EN POR UNIDADMAX= 4.418 : M1N= -2.787 MAX= 1.412 : MIN= -1.412
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
J c c < t > i CORR1EN. FASE C DEL ESTATOR vcs(t) i UOLTAJE FASE C DEL ESTATORTIEMPO: ANTES DE Ln FALLA = .04 CSJ TIEMPO: LUEGO DE LA FALLA = .057 [S3
UALOREG VERTICALES EN POR UNIDADMAX= 3.998 ; MIN= -12.85B MAX= 1.414 : MIN= -2.167
.106
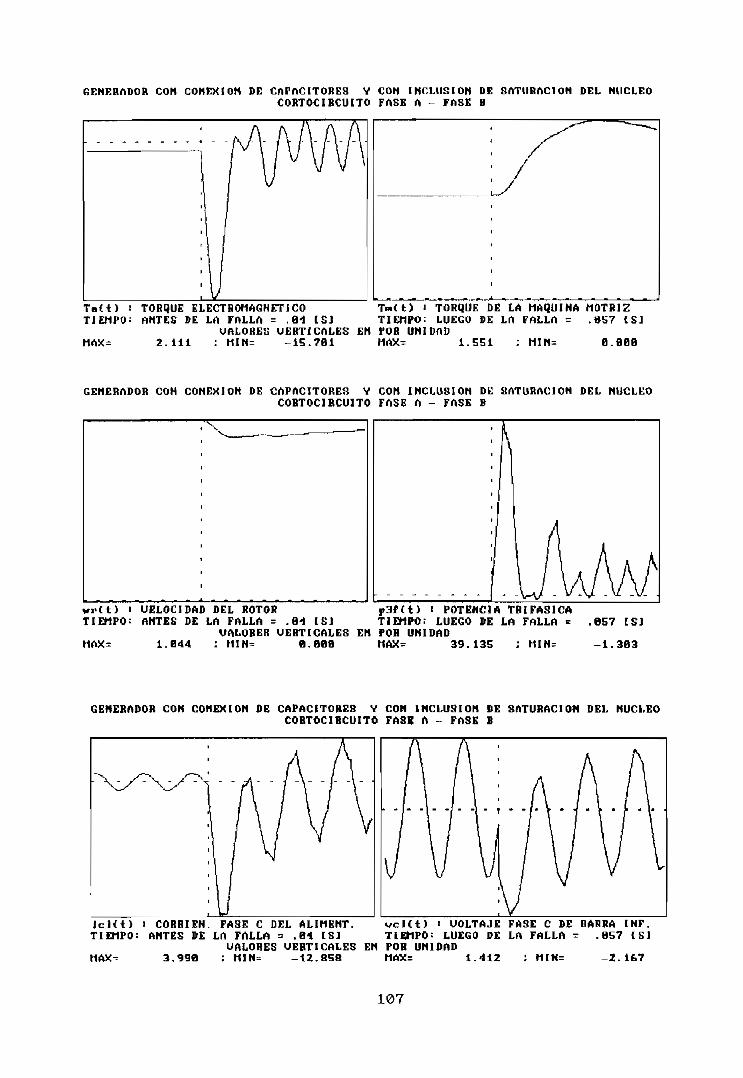
GENERADOR COH CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
Teít) : TORQUE ELECTROMAGNÉTICO Tm(fc) ¡ TORQUE DE LA MAQUINA MOTRIZTIEMPO; AHTES DE LA FALLA = .84 m TIEMPO: LUEGO DE Ln FALLA = .957 isj
UALOHE8 UEHTI CALES EN POR UNIDADHAX= 2.111 ; M1N= -15.701 MAX= 1.551 ; MIN= 0.000
GENERADOR COH CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE A - FASE B
wr(t) i UELOCIDAD DEL ROTOR p3f(t) ' POTENCIA TRIFÁSICATIEMPO- ANTES DE LA FALLA = .84 [SI TIEMPO: LUEGO DE LA FALLA = .957 [SI
VALORES UERT1CALES EN POR UNIDADHAX= 1.044 : MIH= 0.000 MAX= 39.135 ; MIN= -1.303
GENERADOR CON CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOCORTOCIRCUITO FASE ft - FASE B
Icl(t) > CORRIEN. FASE C DEL ALIHENT. vcUt) ' UOLTAJE FASE C DE BARRA INF.TIEMPO: ANTES DE LA FALLA = .84 (SI TIEMPO: LUEGO DE LA FALLA = .857 CSI
UALORES VERTICALES EN POR UNIDAD3.990 : MIN= -12.858 HAX= 1.412 ', MIN= -2.167
107
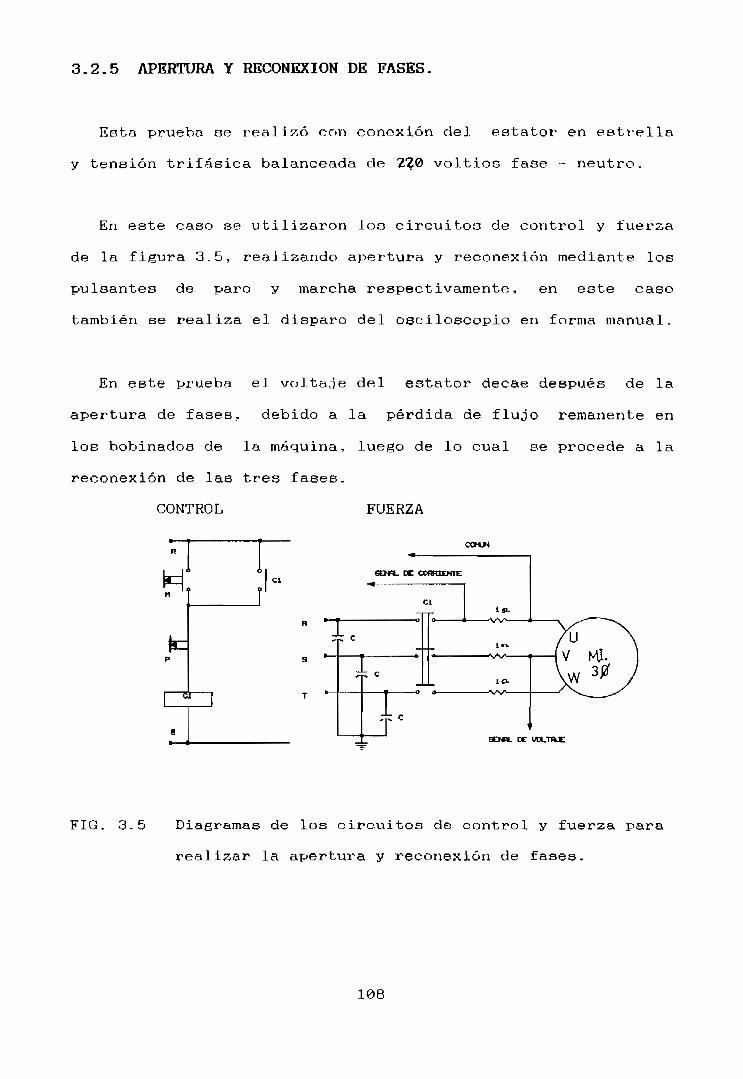
3.2.5 APERTURA Y RECONEXION DE FASES.
Esta prueba se real izó con conexión del estator en estrella
y tensión trifásica balanceada de 220 voltios fase - neutro.
En este caso se u til izar orí loo circuitos de control y fuerza
de la figura 3.5, realizando apertura y reconexión mediante los
pulsantes de paro y marcha respectivamente, en este caso
también se realiza el disparo del osciloecopio en forma manual.
En este prueba el voltaje del estator decae después de la
apertura de fases, debido a la pérdida de flujo remanente en
los bobinados de la máquina, luego de lo cual se procede a la
reconexión de las tres fases.
CONTROL FUERZA
C CORRXENIE
CllSL
J*• ; c
1€
TSENOL DC VOLTAJE:
FIG. 3.5 Diagramas de los circuitos de control y fueraa para
realizar la apertura y reconexión de fases.
108
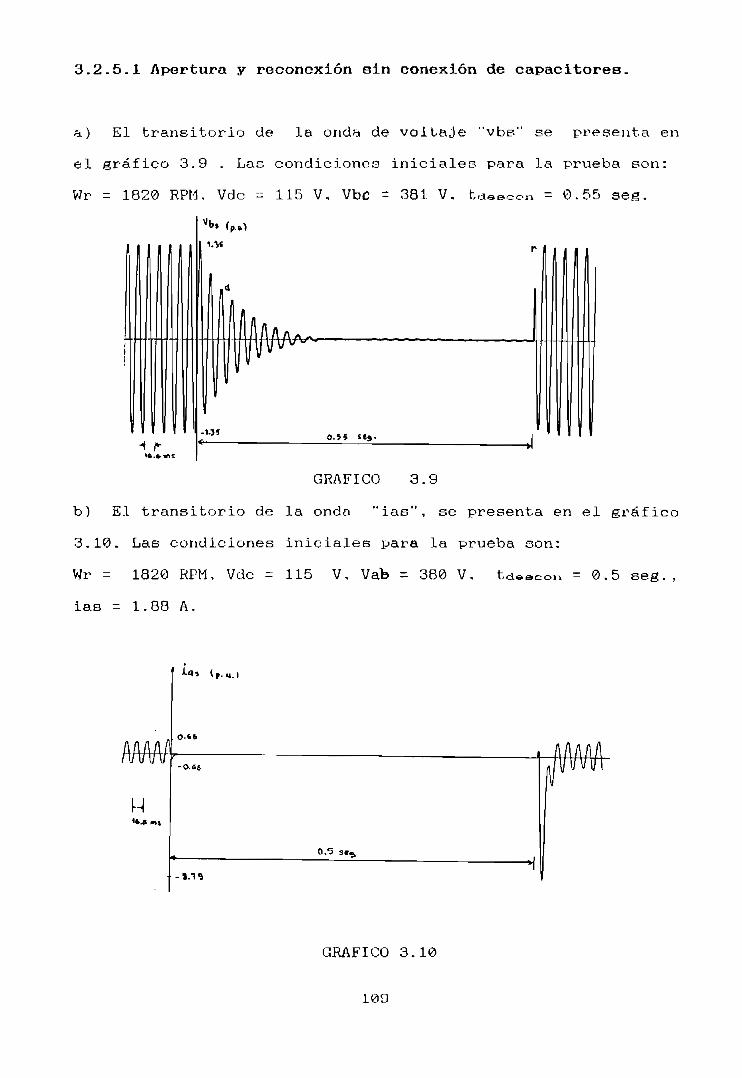
3.2.5-1 Apertura y reconoxión sin conexión de capacitores.
a) El transitorio de la onda de voltaje "vbs" se presenta en
el gráfico 3.9 . Las condiciones iniciales para la prueba son:
Wr = 1820 RPM, Vdc - 115 V, Vbc = 381 V, tdseeon = 0.55 seg.
0.55 «t»-
GRÁFICO 3.9
b) El transitorio de la onda "las", se presenta en el gráfico
3.10. Las condiciones iniciales para la prueba son:
Wr = 1820 RPM, Vdc = 115 V, Vab = 380 V, taMe0n = 0.5 seg.,
ias = 1.88 A.
o-6 e.
-O. fié
H
O.fí
GRÁFICO 3.10
109

3.2.5.2 Apertura y reconexión con conexión de capacitores
a) El transitorio de la onda de voltaje "ves" se presenta en el
gráfico 3.11. Las condiciones iniciales para la prueba son:
C = 11 uF, Wr = 1820 RPM, Vdc = 115 V, Vea = 380 V,
= 0.506 Seg.
O.SOG
GRÁFICO 3.11
b) El transitorio de la onda de corriente "ios", se presenta en
el gráfico 3.12. Las condiciones iniciales para la prueba son:
C = 45 uF, Wr = 1820 RPM, Vdc = 114 V, ibs = 1.94 A
VbC = 380 V, tdeacon =0.6 S6g.
10.9
.o.*.»
16.6
-o.tí
GRÁFICO 3.12
110
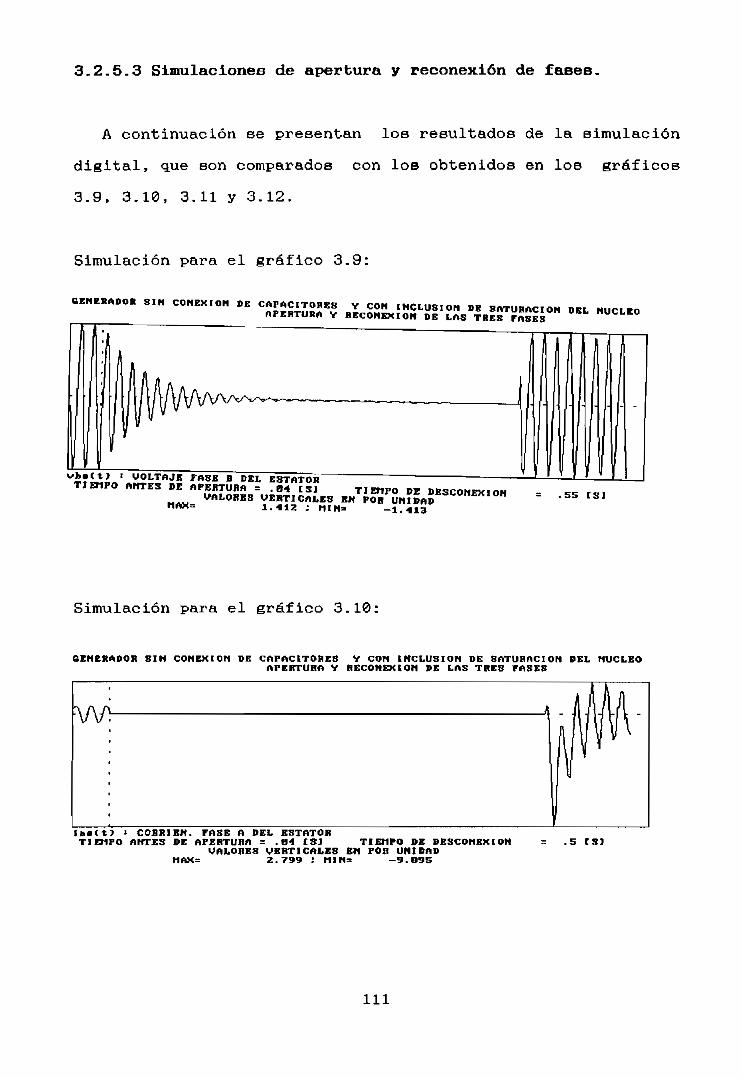
3.2.5.3 Simulaciones de apertura y reconexión de fases.
A continuación se presentan los resultados de la simulación
digital, que son comparados con los obtenidos en los gráficos
3.9, 3.10, 3.11 y 3.12.
Simulación para el gráfico 3.9:
GENERADOR SIN CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA y RECONEXIOH DE LAS TRES FASES ""CLEO
'£¡í~;.« ""-"-- *r,«- B DEL ESTATORTIEMPO AMTES DE APERTURA = .8* CSJ TIEMPO DE DESCONEXIÓN
VALORES VERTICALES EN POR UNIDADMAXt= 1.412 ; MIH= -1.413
.55 CSJ
Simulación para el gráfico 3.10:
GENERADOR SIN CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECONEXION DE LAS TRES FASES
w
l*«(t> t CORRIEN. FASE A DEL ESTATORTIEMPO ANTES DE APERTURA = .0-1 IS1 TIEMPO DE DESCONEXIÓN
VALORES VERTICALES EN POR UNIDADMftX= 2.799 í MIN= -9.B95
.5 CS3
111
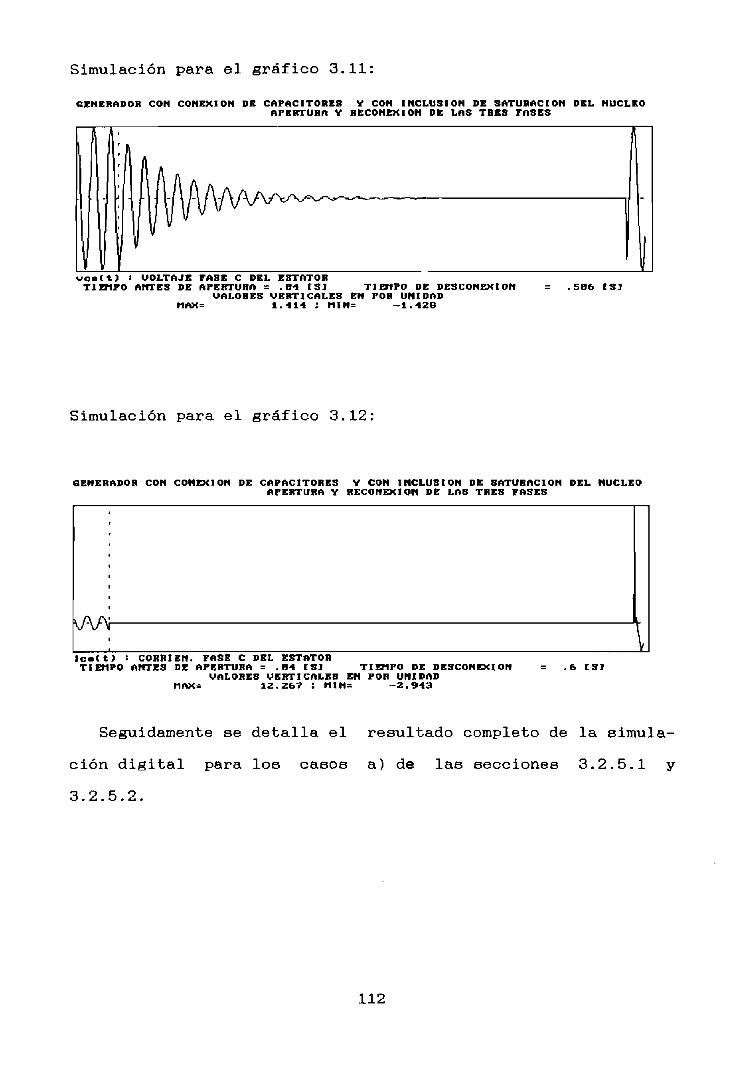
Simulación para el gráfico 3.11:
GENERADOS CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECONEXIÓN DE LAS TRES FASES
vo«(t) 1 VOLTAJE FASE C DEL ESTATORTIEMPO ANTES DE APERTURA = . B4 [SI T1ET1PO DE DESCONEXIÓN
VALORES VERTICALES EN POR UNIDADMAX= 1.414 ; niN= -1.428
.506 [SI
Simulación para el gráfico 3.12:
GENERADOR CON CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECONEXION DE LAS TRES FASES
Ic*Ct> : COBRIEN. FASE C DEL ESTATORTIEMPO ANTES DE APERTURA = . B4 [SI TIEMPO DE DESCONEXIÓN
VALORES VERTICALES EN POR UNIDADiz.267 : MIN=: -2.943
.6 [SI
Seguidamente se detalla el resultado completo de la simula-
ción digital para los casos a) de las secciones 3.2.5.1 y
3.2.5.2.
112
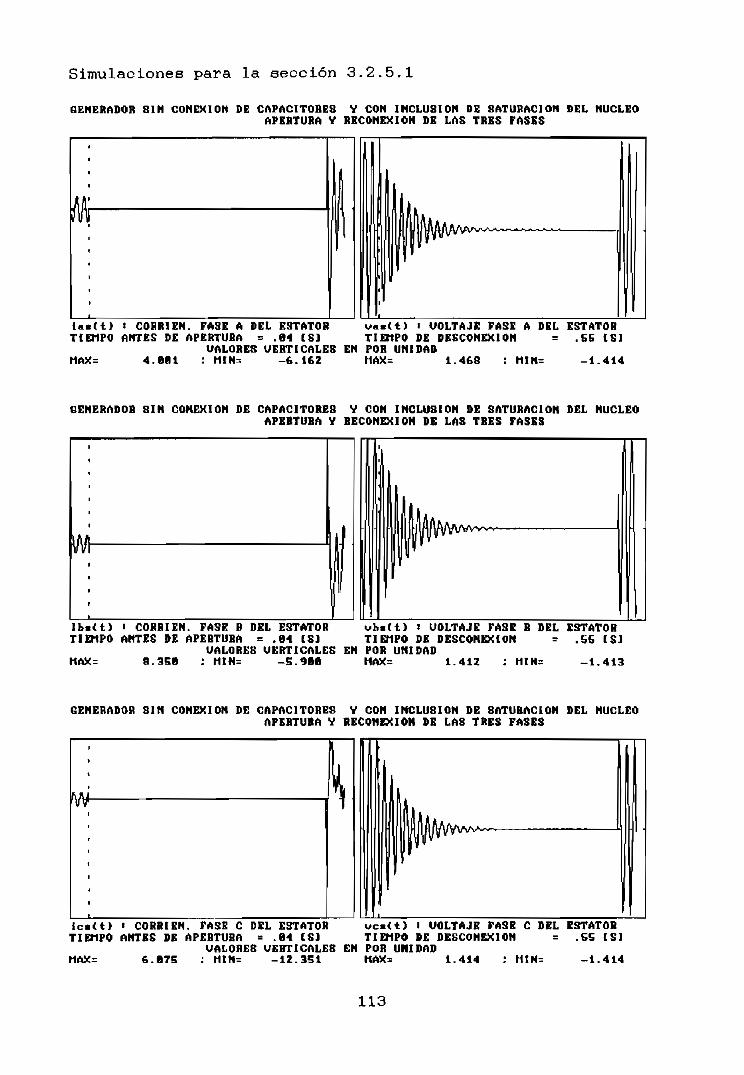
Simulaciones para la sección 3.2.5.1
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECONEXIOH DE LAS TRES FASES
U«(t) i CORRIEN. FASE A DEL ESTATOR ua*<t) i UOLTAJE FASE A DEL ESTATORTIEMPO ANTES DE APERTURA = .84 CSJ TIEMPO DE DESCONEXIÓN = .55 (SI
VALORES VERTICALES EN POR UNIDADMAX= 4.BH1 : H!N= -6.162 MAX= 1.468 \= -1.414
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECOHEXIOH DE LAS TRES FASES
Ib.(t) i CORBIEN. FASE B DEL ESTATOR vh.fi) i UOLTAJE FASE B DEL ESTATORTIEMPO ANTES DE APERTURA = .84 [SI TIEMPO DE DESCONEXIÓN = .56 ISJ
VALORES VERTICALES EN POR UNIDAD8.asa : MIN= -S.9flfl MAX= 1.41Z ; HIN= -1.413
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECONEXION »E LAS TRES FASES
w-
ic.(t) i CORRIEN. FASE C DEL ESTATOR vcs(t) I UOLTAJE FASE C DEL ESTATORTIEMPO ANTES DE APERTURA = .84 (SI TIEMPO DE DESCONEXIÓN = .65 tSJ
VALORES VERTICALES EN POR UNIDADMAX= 6.«75 : MIN= -12.351 MAX= 1.414 : MIN= -1.414
113
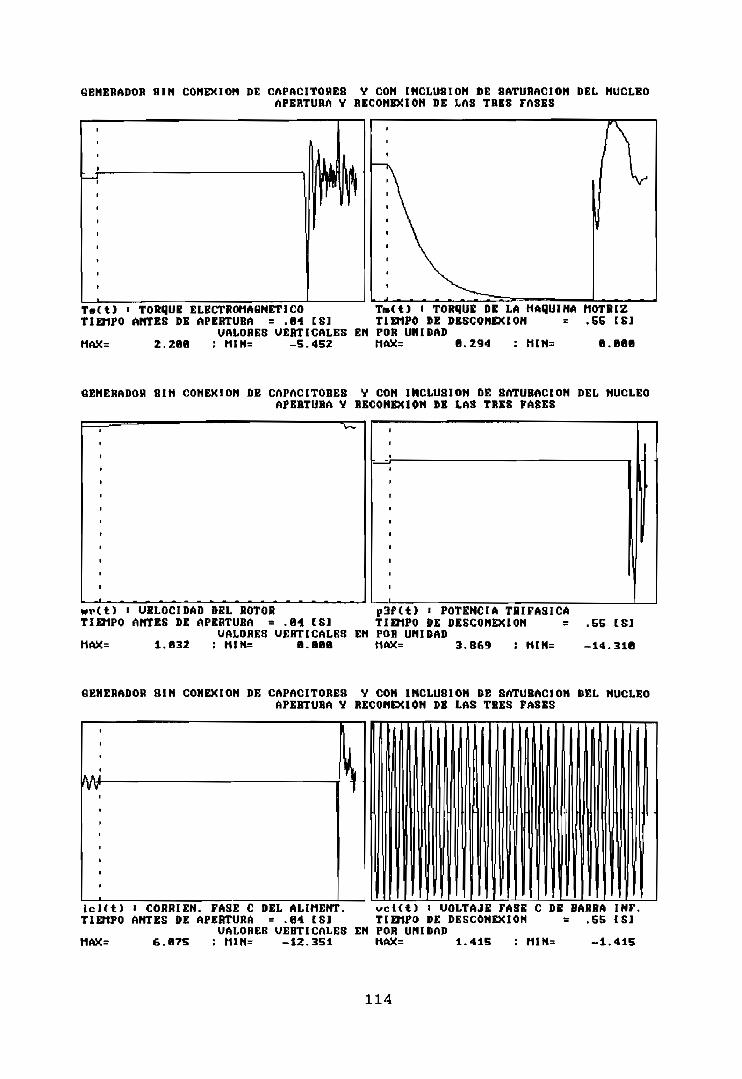
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA V RECONEXION DE LAS TRES FASES
T»(t) i TORQUE ELECTROMAGNÉTICO Tm(t) l TORQUE DE LA MAQUINA MOTRIZTIEMPO ANTES DE APERTURA = .04 LS] TIEMPO DE DESCONEXIÓN = .55 [SI
UALORES VERTICALES EN POR UNIDADMftX= 2.280 : MIN= -5.452 MAX= 0.294 : MIH= 0.000
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA V RECONRX10N DE LAS TRES FASES
wp(t) i UELOCIDAD DEL ROTOR P3f(t) : POTENCIA TRIFÁSICATIEMPO ANTES DE APERTURA = .04 CS3 TIEMPO DE DESCONEXIÓN = .55 CS1
UALORES VERTICALES EN POR UNIDADMAX- 1.032 : MIN= A.000 MAX= 3.B69 : MIN= -14.310
GENERADOR SIN CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA Y RECONEXION DE LAS TRES FASES
IcHt) i CORRIEN. FASE C DEL ALIMENT. vcUt) ' UOLTAJE FASE C DE BARRA INF.TIEMPO ANTES DE APERTURA = .04 CS] TIEMPO DE DESCONEXIÓN = .55 tSJ
UALORE8 VERTICALES EN POR UNIDADMAX= 6.07S : MIM= -12.351 MAX= 1.415 : MIN= -1.415
114
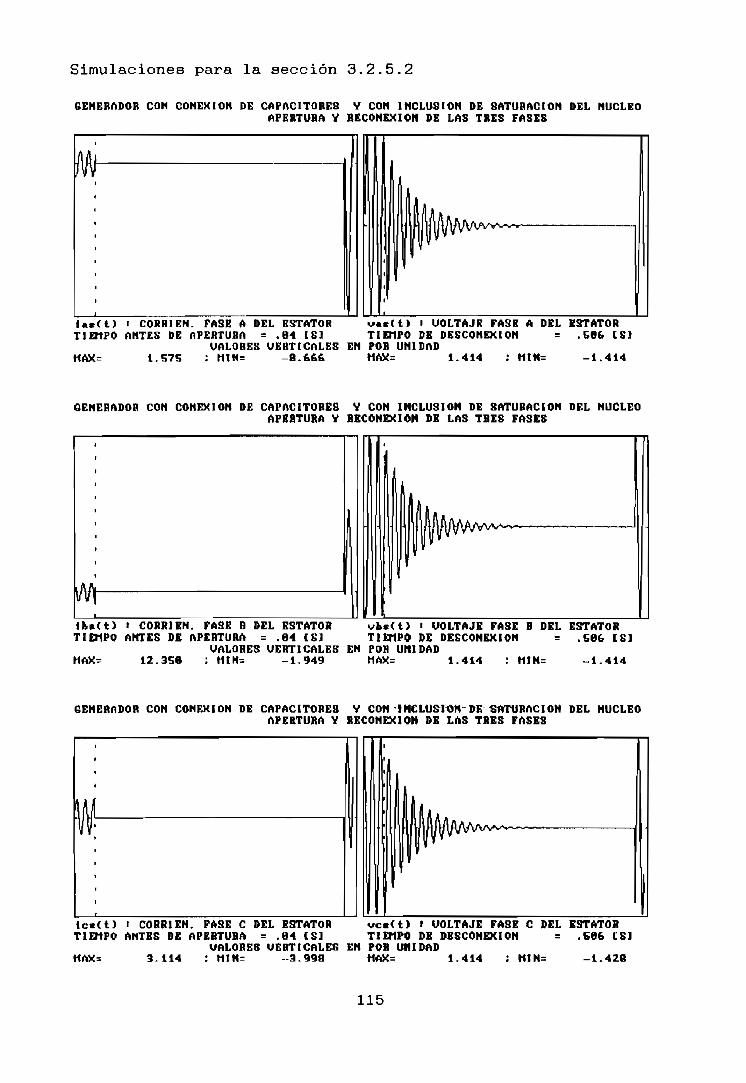
Simulaciones para la sección 3.2.5.2
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA V RECONEXION DE LAS TRES FASES
I«c<t) i CORRIEN. FASE A DEL ESTATOR v»c(t) i UOLTAJR PASE A DEL ESTATORTIEMPO ANTES DE APERTURA = . B4 tSl TIEMPO DE DESCONEXIÓN = .586 CS)
VALORES VERTICALES EN POR UNIDADMAX= 1.575 : MIN= -9.£66 MAX= 1.414 ; MIN= -1.414
GENERADOR CON CONEXIÓN DE CAPACITORES Y CON INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPERTURA V RECONEXION DE LAS TRES FASES
ib.ít) i CORRIEN. FASE D DEL ESTATOR vbs(t) ' VOLTAJE FASE R DEL ESTATORTIEMPO ANTES DE APERTURA = .64 tSÍ TIEMPO DE DESCONEXIÓN = .G6& [SI
VALORES VERTICALES EN POR UNIDADMAX= 12.358 ; HIN= -1.949 MAX= 1.414 : MIN= -1.414
GENERADOR CON CONEXIÓN DE CAPACITORES V CON INCLUSIÓN BE SftTURrtCIOH DEL NÚCLEOAPERTURA Y RECONEXION DE LAS TRES FASES
Ic«<t> t CORRIEN. FASE C DEL ESTATOR vc«(t) i VOLTAJE FASE C DEL ESTATORTIEMPO ANTES DE APERTURA = .84 ÍS1 TIEMPO DE DESCONEXIÓN = .586 CS]
VALORES VERTICALES EN POR UNIDADMAX= 3.114 : MIH- -3.998 MAX= 1.414 : H!N= -1.428
115
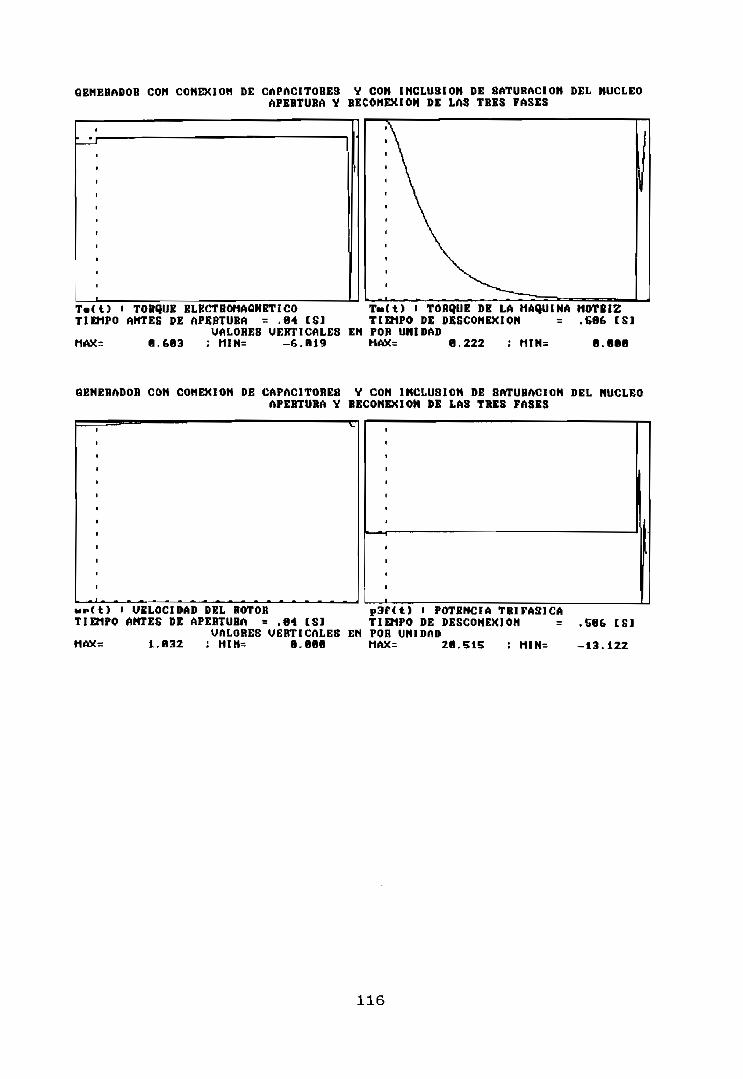
GEHEHADOH CON COHEXION DE CAPACITORES V COH IHCLU3ION DE SATURACIÓN DEL HUCLEOAPERTURA V RECOHEXIOH DE LAS TRES FASES
T«(t) i TOIHJUE ELECTROMAGNÉTICO Tm(t) I TORQUE DE LA MAQUINA MOTÍI2TIEMPO ANTES DE APERTURA = .84 (SI TIEMPO DE DESCONEXIÓN = .686 (SI
VALORES VERTICALES EN POR UNIDADMAX= 8.683 : H1N= -6.819 HAX= 8.222 ; MIN= B.808
GENERADOR COH CONEXIÓN DE CAPACITORES V COH INCLUSIÓN DE SATURACIÓN DEL NÚCLEOAPEBTUBA Y RECOHEXIOH DE LAS TRES FASES
i UELOCIDAD DEL ROTOR P3f(t) i POTENCIA TRIFÁSICATIEMPO ANTES DE APERTURA = .81 ISJ TIEMPO DE DESCONEXIÓN =
UALORES VERTICALES EN POR UNIDADHAX= 1.832 : MIN= 8.888 MAX= 28.515 : MIH= -13.122
.586 IS3
116
C A P I T U L O I V
ANÁLISIS DE RESULTADOS.
4.1 Efectos del S.E.P. en la operación del Generador de
Inducción.
Reacción e.iercida sobre .el S.E.P.
Como se sabe, para la excitación del estator, el generador
de inducción necesita potencia reactiva que es proporcionada
por la central principal del sistema eléctrico . Para la
condición de funcionamiento a plena carga, la potencia reactiva
suministrada por el sistema eléctrico aunmenta y como conse-
cuencia empeora el factor de potencia, produciéndose el calen-
tamiento de los generadores sincrónicas que forman la central
principal; de esto se desprende que se debe determinar la
potencia de los mismos, teniendo en cuenta las exigencias de la
central de reserva compuesta por generadores de inducción.
Una disminución considerable de carga dentro de la red
eléctrica, haría que las condiciones de trabajo de la central
principal se hagan desfavorables, pudiéndose dar el caso que el
generador cubra la carga de la red con exceso. La producción
sobrante del generador de inducción llegaría a la central
principal y los generadores sincrónicos que estén funcionando,
trabajarán como motores perdiendo el ritmo de frecuencia.
De lo descrito se puede decir que resulta ventajoso instalar

un generador de inducción sobre un sistema eléctrico donde ya
se tienen generadores sincrónicos, si la potencia instalada en
la red es mucho mayor que la potencia prevista para dicho
generador.
La instalación de capacitores por fase en los terminales de
la máquina de inducción, hace que se mejoren las circunstancias
relativas al factor de potencia, pero esto trae consigo desde
un punto de vista económico que se encaresca la instalación y
que se haga difícil de conducir; perdiendo por tanto la senci-
llez que caracteriza a la máquina.
Características de generadores de inducción v sincrónicos.
Excitación.-
En la excitación del generador de inducción se requiere de
una fuente externa de potencia reactiva, la misma que puede ser
suplida desde el sistema eléctrico de potencia o desde un banco
de capacitores conectados a la línea.
En la máquina sincrónica el sistema de excitación requerido
comprende una fuente de corriente continua, la cual alimenta al
devanado de campo del rotor.
Factor de potencia.-
Normalmente la instalación de una máquina de inducción a un
sistema eléctrico trae consigo que el factor de potencia del
118
sistema tienda a bajar, ocasionando problemas de funcionamiento
normal en la central principal. Para operación de la máquina
como generador se tiene que al aunmentar la velocidad de rota-
ción hasta plena carga, en algo disminuye este inconveniente,
pero siempre manteniendo valores de factor de potencia por
debajo de lo aconsejable. Una de las formis de solucionar este
problema ha sido instalando bancos de capacitores en los termi-
nales del estator que de paso mantienen el voltaje en el
generador.
En la máquina sincrónica se puede operar virtualmente a
cualquier valor de factor de potencia dentro de ciertos limi-
tes, ajustando la excitación de corriente continua sobre el
devanado de campo del rotor. En resumen se tiene que el genera-
dor sincrónico puede imponer el factor de potencia del sistema
mientras el generador de inducción tiende a bajarlo.
Velocidad y carga.-
La velocidad obtenida en el eje del generador, determinada
por la máquina motriz , tiene su efecto sobre la potencia
activa entregada por el generador al sistema eléctrico, no
influyendo en nada en la frecuencia de salida.
En el generador* sincrónico en cambio la velocidad del
sistema motriz principal (turbina), determina la frecuencia de
operación del sistema, debiendo ser regulada la velocidad
constantemente para que la frecuencia de salida esté dentro de
un estrecho limite.
119

En lo que respecta a la potencia de salida del generador de
inducción, ésta se encuentra determinada por la velocidad
rotórica. En el generador sincrónico la potencia activa de
salida se encuentra determinada por el torque aplicado al
sistema motriz principal (turbina).
Eficiencia.-
La utilización del generador sincrónico para la obtención de
la energía eléctrica ha dado resultados satisfacorios, teniendo
una eficiencia que alcanza hasta el 98 % . En los generadores
de inducción la eficiencia es más baja que en los sincrónicos,
así por ejemplo en una máquina de 3000 KW con dos polos se
tiene una eficiencia de 96.3 % , pero puede ser mejorada
sustancialmente usando un rotor especialmente diseñado de baja
resistencia que daría como resultado un bajo torque de acelera-
ción y una disminución de las pérdidas (I2R). También es
importante mencionar que el generador de inducción tiene un
mejor rendimiento mientras el factor de potencia de la carga es
cercano a 1.
Características dal generador de inducción: autoexcitado v
acoplado a una barra infinita.
En el generador de inducción acoplado a la barra infinita el
voltaje y la frecuencia en los terminales son establecidos por
la barra, en tanto que el generador excitado por capacitores el
voltaje terminal y la frecuencia no son conocidos, teniéndose
que calcular para una velocidad, capacitor de excitación e
120
impedancia de carga determinados.
El valor de la reactancia de magnetización se mantiene
constante cuando el generador se conecta a la barra, mientras
que para el caso excitado por capacitores, esta reactancia
depende de la velocidad angular, de las condiciones de carga,
constituyéndose en un valor muy importante ha ser calculado
para efectos de realizar una modelación.
Con el generador acoplado a la barra se mantiene una tensión
fija en sus terminales, no asi en el generador autoexcitado
donde para mantener la tensión constante, es necesario variar
la velocidad de la máquina motriz.
Desde un punto de vista económico el generador de inducción
autoexcitado resulta una instalación costosa para potencias
elevadas, por la inclusión de los capacitores, resultando
adecuada su utilización en centrales de pequeña potencia,
aisladas y donde no es posible proveer un mantenimiento cons-
tante .
El origen de fallas trae en el generador autoexcitado, que
las corrientes no se mantengan, pues los voltajes en los
capacitores se hacen cero rápidamente. En el generador acoplado
a la barra infinita las corrientes de falla se mantienen para
los caeos de cortocircuitos a tierra y entre fases dándose un
decaimiento en los voltajes terminales del estator.
El funcionamiento en los dos casos del generador de in-
121
ducción, esta condicionado a la potencia reactiva disponible en
el estator, siendo mayor su eficiencia para factores de poten-
cia cercanos a 1, si se excede en carga con el autoexcitado
puede perder excitación.
4.2 COMPARACIÓN Y ANÁLISIS DE RESULTADOS.
Para realizar la comparación y análisis de los resultados,
se toman en cuenta los datos que se obtienen de la simulación
digital y de la parte experimental. Se desarrolla un cuadro
comparativo donde se obtienen los márgenes de error que origi-
nan las respuestas, en los estados estable y transitorio de
funcionamiento del generador.
Los análisis son realizados tomando en cuenta las respuestas
de corriente o voltajes que se obtiene del generador, hacién-
dose difícil tener datos experimentales de otras variables por
limitaciones del laboratorio, pero que sí ee obtienen por medio
del programa digital.
4.2.1 Funcionamiento en estado estable
Las respuestas obtenidas en este estado de funcionamiento
del generador, son obtenidas a partir de los cálculos realiza-
dos dentro del circuito equivalente. El comportamiento de las
variables de corriente y voltaje en el estator del generador se
muestra en los oscilogramas momentos antes de producirse las
fallas, donde se puede apreciar las formas de onda sinusoidales
oscilando normalmente con su respectiva frecuencia y con sus
122
valores máximos y mínimos correspondientes.
En los resultados obtenidos de la simulación, las formas de
onda de corriente y voltaje en el estator, como el resto de
variables, muestran el comportamiento que tienen en este estado
en 40 milisegundos, luego de lo cual se da paso a la simulación
en estado transitorio. Los valores máximos y mínimos de las
formas de onda se transforman a valores eficases para efectos
de comparación con los valores numéricos provenientes de la
simulación digital.
La respuesta obtenida en estado estable en el programa,
abarca el flujo de potencia activa y reactiva entre generador y
barra infinita, el factor de potencia del sistema, indicando el
comportamiento de estos parámetros para valores de velocidad
desde vacio hasta plena carga y para valores de capacitores en
sus terminales. De lo desarrollado, el incremento de la veloci-
dad trae consigo el incremento de la salida de potencia activa
y el suministro de potencia reactiva desde la barra infinita
hacia el generador de igual forma el factor de potencia se ve
afectado al sufrir leves incrementos, pero siempre mantenién-
dose en valores por debajo de los permisibles.
Con la inclusión de los capacitores se tiene una fuente
adicional de potencia reactiva, permitiendo corregir el proble-
ma comparando con lo obtenido cuando no se tienen los capacito-
res. Así mismo el incremento excesivo de reactivos en los
terminales del estator daría lugar a una autoexcitación de la
máquina, a la aparición de sobrevoltajes y a una bajada del
123
factor de potencia del sistema, existiendo un rango de capaci-
tores óptimos que permiten mantener el factor de potencia y las
condiciones de funcionamiento dentro de lo apropiado para una
determinada velocidad de operación.
4.2.2 Cortocircuito Trifásico_
De acuerdo a los oscilogramas presentados en los gráficos
3.1 y 3.2 comparados con los de la simulación, se comprueba que
tienen características semejantes como son la forma de onda,
los picos máximos y mínimos y los cruces por cero de la varia-
ble considerada. Sin embargo en los valores de los picos existe
diferencias mínimas, que obedece a las resistencias utilizadas
para llevar las muestras al osciloscopio, lo que no sucede con
los resultados del modelo.
En el momento de la falla se observa que se produce un
crecimiento del torque electromagnético en sentido negativo
para luego decrecer y hacerse cero.
Para la realización del cortocircuito se implementa un
circuito de control y fuerza como se indica en la sección
3.2.1, de acuerdo a esto, primero se desconecta la línea de
alimentación para posteriormente producir la unión de los
terminales estatoricos que lleva aproximadamente unos 32
milisegundos ( dos ciclos ), siendo esta la explicación para
obtener las formas de onda de corriente, donde se observa el
intervalo inicial igual a cero para luego tener el pico posi-
tivo o negativo.
124

Los valores de los picos de corriente alcanzados, dependen
de los ángulos de corriente en donde se produce las fallas.
Los valores picos, los de funcionamiento estable y los
errores que originan las varables en consideración se presen-
tan en la tabla comparativa 4.1.
4.2.3 Cortocircuito fase - tierra.
De acuerdo a los oscilogramas de los gráficos 3.3 y 3.4
comparados con las respectivas simulaciones los resultados son
idénticos en cuanto a su forma de onda con sus picos y máximos
incluidos. Por desarrollo del programa digital, se tiene en la
simulación con conexión de capacitores, que el tiempo conside-
rado después de la falla es de aproximadamente tres ciclos
resultando muy convenientes para efectos de comparación.
Resultaría muy adecuado tener en un solo gráfico variables
importantes que denotan el comportamiento de la máquina, como
son el torque electromagnético, voltaje y corriente, pero por
limitaciones en el laboratorio se hace imposible. Con el
resultado de la simulación se observa que el torque en el
momento de la falla tiende a crecer en sentido negativo para
luego alcanzar una oscilación positiva - negativa.
En lo referente a la velocidad del rotor, esta disminuye en
el momento de la falla, para luego crecer en forma gradual
hasta alcanzar aproximadamente la velocidad que mantenía antes,
debido a que en el instante de la falla ciertos flujos concate-
125
nados existen en el circuito del rotor, los mismos que no
pueden cambiar instantáneamente y por tanto se incrementan las
corrientes de estator y rotor para mantener estos flujos
constantes.
Los valores obtenidos de la simulación y de las pruebas
experimentales con BUS respectivos cálculo de errores, se
muestran en la tabla comparativa 4.1.
4.2.4 Cortocircuito dos fases - tierra.
Los oscilogramas de los gráficos 3.5 y 3.6 comparados con
sus respectivas simulaciones dan una coincidencia total, que
comprueba la valides; del modelo matemático planteado para el
estudio.
Como en los casos anteriores, los valores picos máximos y
mínimos dependen del ángulo en el cual se produce la falla. Con
la conexión de los capacitores el pequeño tiempo de estado
transitorio mostrado en la simulación, no impide realisar una
comparación adecuada.
Los valores picos y de estado estable con sus respectivos
errores se muestran en el cuadro comparativo de tabla 4.1.
4.2.5 Cortocircuito dos fases.
Realizando la comparación de los gráficos 3.7 y 3.8 con sus
respectivas simulaciones el resultado es idéntico, en lo que se
126

refiere a las características de formas de onda y valores picos
máximos y mínimos de las variables comparadas.
De la forma de onda del torque electromagnético se observa
la tendencia a crecer en forma negativa después de producirse
la falla, para luego permanecer oscilando, tomando valores
positivos y negativos.
El comportamiento de las corrientes en las fases que se
cortocircuitan, es alcanzar valores picos elevados en tanto que
los voltajes de fase decaen a valores menores a los mantenidos
antes de la falla.
En cuanto al torque mecánico entregado por la máquina de
continua al generador, no tiene una influencia apreciable,
debido al tiempo de duración del transitorio en la máquina de
inducción. Por otro lado dentro de la simulación de la falla se
tiene la opción de considerar constante o variable el valoi^ del
torque mecánico mientras dura la falla, para tener un comporta-
miento más real.
En el cuadro comparativo de la tabla 4.1 se muestran los
valores de estado estable y transitorio medidos y simulados con
sus respectivos cálculo de errores.
4,2.6 Apertura y reconexión de fases.
De acuerdo a los gráficos 3.9 y 3.10 y sus correspondientes
127
simulaciones, las características en lo referente a sus formas
cíe onda, valores picos máximos y mínimos de las variables
comparadas confirman la validez del modelo matemático.
De las formas de onda de los voltajes de fase obtenidos, se
observa que estos decaen en forma exponencial, mientras las
corrí en ten p,e hocen cero bruscamente, Ina mi fMiia» que causan el
tener los valores picos de voltaje.
Por otro lado el torque electromagnético se hace cero luego
de producirse la apertura, en tanto que la velocidad del rotor
tiende a un embalamiento.
Luego de la reconexión se producen transitorios que dependen
directamente del tiempo que dura la apertura, para luego
estabilizarse.
De la misma forma que los casos anteriores, cuando se tiene
la conexión de capacitores en el desarrollo de la simulación,
el tiempo presentado luego de la reconexión es mínimo, sin
embargo es importante, para efectos de tomar valoree máximos o
mínimos y de observar la tendencia de la variable considerara-
da.
128

GRAFIC
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3. 12
ESTADOESTABLE
Mp.u.
.52
.5
.5
.52
.51
.51
.63
.71
.46
.47
.482
.486
IS
Sp.u
.5
.49
.508
.508
.49
.49
.619
.7
.508
.508
.508
.508
E%
-3.84
-2.0
-1.93
-2.3
-3.92
-2.74
-1.74
-1.4
8.2
7.6
5.3
4.5
VS
Mp.u.
.99
1.004
.99
.99
.98
.98
1.004
1.007
.96
.95
.985
.988
Sp.u.
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
E%
1.01
-.39
1.01
1.01
2.04
2.04
-.39
-.69
3.1
2.5
1.5
1.2
V AA NR AI LA IB ZL AAE D
A
lbma>e
ibmJ.ii
Íarnei>c
iamln
IQmjBuc
Ía.m JLti
Iclmax
iamln
ÍDma.>c
íbmin
iDmax
ibmin
ÍbmeL>e
ibmin
13majc
iamln
VDma.it
Vbm«L>e
1 cima, x
iamln
VCmttíc
VCmsLJt1 Cm.ei.3cíífcmin
ESTADOTRANSITORIO
Mp.u.
Sp.u.
E%
CortocircuitoTrifásico .
6.40.0
0.0-6.7
6.030.00.0
-6.34
-5.80.0
0.0
-5.4
Cortocircuitofase - tierra.11.45-6.219.62
-4.33
10.70-5.959.93
-4.54
-6.4-4.2
*3 OO . tL,
4.7
Cortocircuitodos fases-tierra
4.04-8.833.92
-8.66
3.84-9.253.67
-8.93
-4.94.7
-6.33.1
Cortocircuitodos fases5.12
-4.5310.25-3.43
4.83-4.3510.67-3.567
-5.6-3.9
4.03.9
Apertura yreconexión0.631.232.58
-8.790.651.25
10.92-3.03
0.7061.4122.799
-9.8950.7071.414
12.267-2.943
10.514.5
B.412.57.3
13.1IB. 914.2
M - valor medido : S = valor simulado : E = error
CUADRO 4.1
129
C O N C L U S I O N E S
El estudio realizado eri el presente trabajo, cumple con lo
establecido inicialmente, esto es, el desarrollar un modelo
adecuado que permite simular el funcionamiento del generador de
inducción en estado estable y transitorio desarrollando las
fallas más comunes que pueden presentarse, cuando se encuentra
acoplado a una barra infinita.
Para la implementación del programa digital, se utiliza el
compilador Quick Basic, cuya utilización reduce considerable-
mente el tiempo de ejecución del programa, el mismo que consta
de un programa fuente de donde se derivan subprogramas. Estos
eubprogramas realizan directamente funciones como: ingreso de
datos, manipulación de los distintos menús, cálculos matemáti-
cos desarrollados en algoritmos y graficación de las distantas
variables .
En el estudio del sistema motor - generador de inducción se
pone especial énfasis al desarrollo del estado transitorio en
lo referente a las fallas y la apertura y reconexión de fases,
con la obtención de curvas. El desarrollo del estado estable de
funcionamiento de la máquina se limita a obtener los resultados
en forma numérica en lo que se refiere a voltajes, corrientes.
factor de potencia, transferencia de potencia activa y reacti-
va , deslizamiento, velocidad rotórica, sin tener el desarrollo
de formas de onda.
El modelo matemático desarrollado para la obtención de los
transitorios, se basa en la utilización de la transformación de
ejes abe en el tiempo a ejes ortogonnales qdo fijos en el
estator, disminuyendo la complejidad que implicaría realizar el
análisis en ejes en el tiempo.
De la posibilidad que brinda el modelo de incluir la satura-
ción magnética del núcleo, se concluye de los resultados
obtenidos que ésta no tiene mayor influencia en el comporta-
miento de las variables, debido a que solamente se considera la
saturación de la reactancia de magnetización y además a la
dificultad para determinar con exactitud los valores de la
curva de magnetización.
La inclusión de los capacitores conectados a los terminales
de la máquina, determinan el comportamiento que tiene la misma
en cuanto a sus características y funcionalidad. La aplicación
de los capacitores es importante, debido a que se constituyen
en un soporte de potencia reactiva y además porque regulan el
voltaje terminal y el factor de potencia. El valor del capaci-
tor que se conecte por fase debe ser limitado, de no ser así,
la máquina corre el peligro de autoexitarse, lo que trae como
consecuencia la formación de sobrevoltajes en los terminales
del estator y bajar el factor de potencia del sistema.
En el desarrollo del modelo matemático se plantean para cada
falla modelos matemáticos particulares, facilitando de esta
forma el manejo de las ecuaciones diferenciales para su resolu-
ción , así como los tiempos e intervalos de integración.
Se comprueba plenamente los planteamientos teóricos realiza-
131
dos para la máquina de inducción entre ellos podemos citar:
para su funcionamiento requiere de una potencia reactiva la
cual es suplida por el sistema eléctrico de potencia al cual se
encuentra conectada, se comprueba que la frecuencia de salida
así como el voltaje en los terminales del generador esta
determinado por el sistema al que se conecta. El cambio en la
velocidad de giro del rotor origina también tener un cambio en
la potencia de salida del generador.
Las características similares de las formas de onda de la
simulación comparadas con las obtenidas experimentalmente para
cada variable considerada en las fallas del sistema, comprueba
lo útil del modelo matemático desarrollado, existiendo de por
medio pequeños errores debidos enteramente a las particula-
ridades de la máquina y de los aparatos de medida.
En el cortocircuito trifásico las corrientes de falla de
cada fase tienen un alto valor inicial, pero decrecen a cero en
un tiempo determinado, que para un diseño típico esta en el
orden de uno a tres ciclos. Se justifica este comportamiento
debido a que los voltajes en el estator se hacen cero y al no
disponer la máquina de una excitación interna que mantenga esas
corrientes.
En loe cortocircuitos fase - tierra, dos fases - tierra y
dos fases desarrollados, se tiene que las corrientes de falla
permanecen oscilando siriusoidalmente entre valores positivos y
negativos, superiores a los mantenidos en funcionamiento
normal, debido a que el generador de inducción sigue recibien-
132
do voltaje en sus terminales no involucrados y por tanto se
mantiene el flujo de potencia de excitación desde la barra
infinita. Resulta importante por tanto concluir que las co-
rrientes de falla para esta operación del generador, guarda
similitud con las corrientes de falla del generador sincrónico
pues las dos se mantienen, a pesar de no tener excitación
interna la máquina de inducción que si lo posee la sincrónica.
En cambio con el generador autoexcitado estas corrientes de
falla se hacen cero, al no poseer la excitación desde los
capacitores cuyos voltajes tienden también a cero.
Para el caso de apertura de las tres fases, la máquina
pierde excitación gradualmente por la disminución de la energía
almacenada en la reactancia del rotor y en la reactancia de
magnetización, se observa que se producen picos de voltaje
elevados en las fases, siendo mayores cuando se tienen valores
de corrientes máximos en el momento de la apertura. Haciendo
una comparación con el generador autoexcitado, para este caso
se observa que tienen un comportamiento igual con el conectado
a la barra, pues en ambos casos el sistema sube de velocidad,
pero baja el torque de la máquina motriz con lo que el creci-
miento de la velocidad se hace más lento.
La reconexión de las fases posterior a la apertura, tiene
características peculiares, debido a que se producen cuando la
máquina no ha perdido totalmente la excitación en sus bobina-
dos. Los transitorios de corriente tienen similitud entre los
obtenidos en el arranque inicial de la máquina, caracterizados
por picos elevados, que sobrepasan los valores nominales.
133
El factor de potencia tiene valores deficientes en tanto que
la carga y la velocidad sean reducidos, manteniéndose por abajo
de los valores nominales. La razón para esto es que mientras el
voltaje del entrehierro se mantiene constante igualmente la
corriente de magnetización se mantiene constante; de esta forma
la corriente reactiva requerida por el generador es sustancial-
mente constante a lo largo de toda la operación. Consecuente-
mente para obtener el más favorable fac tor de potencia, la
máquina debería operar cerca a plena carga todo el tiempo.
Los valores obtenidos de corriente de magnetización en
generadores de pequeña potencia como el utilizado en el labora-
torio, se constituyen entre un 25% a 45 % de la corriente
nominal de la máquina y se suministra al generador bajo la
tensión de la barra infinita, lo que conduce a afirmar que la
potencia de excitación en kilovoltamperios constituye también
en un 25% a 45% de la potencia del generador, esto significa
que si en una central eléctrica se han instalado dos a cuatro
generadores de inducción de igual potencia» entonces para la
excitación de la central, debe emplearse totalmente un genera-
dor sicrónico de la misma potencia que los de induce ion, lo
que implica que a este nivel su utilización no resulta ventajo-
sa . Para generadores de inducción de gran potencia su excita-
ción es menor del 1 %.
La pérdida de estabilidad en el generador de inducción, esta
condicionada a la potencia reactiva de que dispone, pues de lo
contrario no tendría excitación interna suficiente, como ocurre
cuando se producen cortocircuitos, que se manifiesta al tener
134
corrientes elevadas, voltajes decaídos al igual que insufi-
cientes torques. Los generadores de inducción funcionan mejor
para factores de potencia cercanos a 1, en cambio para loo
generadores sincrónicos se tiene una mayor estabilidad y pueden
fuñeionar a factores de potencia bajos.
En régimen de funcionamiento permanente, el flujo de poten-
cia activa y reactiva entre generador y barra infinita, esta
sujeto al deslizamiento, poniendo especial atención en no
exceder su rango. Se tiene un límite aceptable para funciona-
miento normal de la máquina, el considerar hasta un 10 % el
aunmento de la velocidad del eje con respecto a la velocidad
sincrónica, fuera de lo cual se tendría una inestabilidad,
manifiesta en violentas fluctuaciones de voltaje y frecuencia.
135

R E C O M E N D A C I O N E S
Dada la sencillez que presta la máquina de inducción para su
instalación y su bajo costo de mantenimiento, resulta ventajosa
su utilización a nivel industrial o en sectores rurales. Gene-
radores de inducción de moderada capacidad de entre 3.500 y
10.000 Kw., son particularmente bien adaptados para sistemas
de potencia, donde la corriente de excitación del generador de
inducción puede ser derivada directamente desde los alternado-
res. Son adaptables ventajosamente en sistemas donde hay
aparatos sincrónicos tales como un convertidor sincrónico,
motor sincrónico. Por ejemplo en la calle 59, una subestación
que se encuentra conectada al sistema eléctrico de la ciudad de
Nueva York, tiene instalada cinco generadores de inducción de
7500 Kw, cada uno movida con turbinas de vapor y la potencia
generada por las máquinas, es sincronizada automáticamente con
los alternadores, obteniéndose buenos resultados.[8]
Los avances realizados en el desarrollo de compensadores
estáticos, hace ambiciosa su utilización para controlar proble-
mas que se presentan en la máquina de inducción tales como el
flujo de potencia reactiva, la aparición de resonancia subsin-
crónica sea en la corriente o el voltaje asi como la elimina-
ción de posibles oscilaciones que se presentan entre máquinas
de inducción, esto lleva a sugerir se realice un estudio de la
funcionalidad de la máquina cuando se encuentra acoplado a
estos componentes electrónicos dé potencia.[7]
En el esquema siguiente se muestra una máquina de inducción
movida por una turbina y conectada a la barra infinita a través
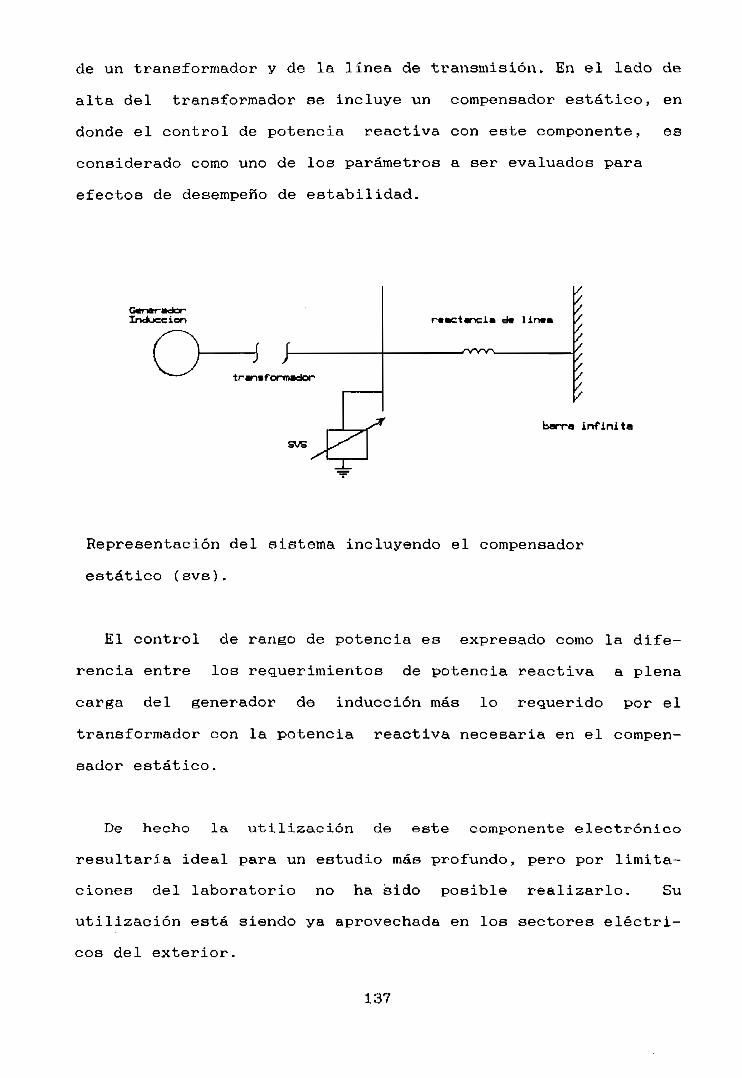
de un transformador y de la línea de transmisión. En el lado de
alta del transformador se incluye un compensador estático, en
donde el control de potencia reactiva con este componente, es
considerado como uno de los parámetros a ser evaluados para
efectos de desempeño de estabilidad.
GvnarradorInckjccion
-4 ftransformador
SVS
reactancia d« linca
/
/
/
barra infinita
Representación del sistema incluyendo el compensador
estático (svs).
El control de rango de potencia es expresado como la dife-
rencia entre los requerimientos de potencia reactiva a plena
carga del generador de inducción más lo requerido por el
transformador con la potencia reactiva necesaria en el compen-
sador estático.
De hecho la utilización de este componente electrónico
resultaría ideal para un estudio más profundo, pero por limita-
ciones del laboratorio no ha sido posible realizarlo. Su
utilización está siendo ya aprovechada en los sectores eléctri-
cos del exterior.
137
La utilización del presente trabajo, en un posible estudio
que involucre al compensador estático de potencia, resultaria
muy conveniente en la medida de que se tiene un conocimiento
adecuado, en lo que respecta a flujos de potencia activa y
reactiva y al desarrollo de modelos matemáticos que fijan el
comportamiento de la máquina, para perturbaciones producidas.
Se tendría que centrar el estudio, en la forma como obtener un
modelo adecuado para el compensador estático, basado en sus
características y funcionalidad.
La utilización del programa digital desarrollado prestaría
una gran ayuda, para efectos de comparación cuando las pruebas
de fallas sean realizadas utilizando dispositivos electrónicos
que puedan controlar el ángulo de disparo en la onda sometida a
observación.
138
A P É N D I C E A l
PARÁMETROS DE LA MAQUINA DE INDUCCIÓN [113,[13]
Los parámetros del circuito equivalente de la máquina de
inducción son obtenidos en base a loe datos de las pruebas de
vacio y de rotor bloqueado.
En este apéndice se incluye la medición de la resistencia
por fase del estator, la determinación de la relación de
espiras y la constante de inercia.
Por otro lado, se presentan los valores obtenidos para
trazar la curva de magnetización del núcleo del hierro.
Al.l Medida de re,
La resistencia por fase se midió aplicando un voltaje
continuo a una fase del estator, desde donde se tomaron valores
de voltaje y de corriente. Así se tiene:
VDC = 6.5 V
IDC = 4.108 A
de aquí se tiene
rs = 1.582 Q
Al.l
Al.2 Medida de Xls, X'lr, r'r y Xm.
De la prueba de vacio se obtienen los siguientes datos:
VVAGIO - 220 V
IVAOIO = 3.4 A
PVACIO = 210 W
De la prueba de rotor bloqueado se obtiene:
VRB = 52.5 V
IRB = 7 A
PRB = 290 W
Con estos datos se tiene, que los parámetros por fase para
la máquina con rotor bobinado son los siguientes:
Xls - 5.802 Q
X'lr = 5.802 Q
Xm = 104.7453 Q
r'r = 4.9155 Q Al.l
Para la obtención de valores en por unidad, de todos los
parámetros de la máquina, se parte de los datos de placa de la
máquina que se consideran como valores base, así:
VB = 220 V
IB = 7.04 / -T3 A Al.2
ZB = VB / IB = 54.4358 Q
De acuerdo a la definición de la ecuación (1.142.) se obtie-
nen los parámetros en por unidad, quedando:
Al. 2
rs = 0.02754 p.u.
Xls = 0.1066 p.u.
X'lr = 0.1066 p.u. Al.3
Xm = 1.9242 p.u.
r'r = 0.0903 p.u.
Al.3 Medida de la relación de espiras (a)
Para la determinación de la relación de espiras, se deja los
terminales del rotor en circuito abierto y se aplica al estator
el voltaje trifásico nominal a la frecuencia nominal, se mide
el voltaje inducido en cada fase del rotor y la relación de
espiras es determinada por la siguiente relación:
VIa = — Al. 4
V2
donde VI : voltaje aplicado por fase al estator.
V2 : voltaje inducido en cada fase del rotor.
Para la realización de esta prueba, se conecta al estator de
la máquina en conexión delta, mientras el rotor en estrella. Se
aplica al estator el voltaje nominal VI = 220 V, midiendo luego
el voltaje inducido entre fases del rotor Vr = 141 V, con lo
que se tiene:
VI = Vs = 220 V
Vr 141V2 = = V
f3 -T3
Al. 3

por tantoVI 220 V
V2 141/V3 V
a = 2.70249 Al.5
Al.4 Hedida de la constante de inercia (H)
Para la obtención de la constante de inercia, primeramente
se calcula el momento de inercia utilizando el método electro-
mecánico. Por definición se tiene:
J P Wr + A Wr2 = 0 Al.6
donde J : Momento de inercia.
P Wr : Pendiente de la recta en la parte lineal de
la curva de desaceleración.
A Wr2 : Fuerza de rozamiento y fricción del aire.
de ecuación Al.6 se obtiene:
AJ = [m= Kg] Al.7
P Wr
Para la obtención de A Wr2 y p Wr se realizan las pruebas de
vacio desacoplado y desaceleración respectivamente.
En la prueba de vacio desacoplado, se obtubo en la medición
los siguientes valores:
Al.4
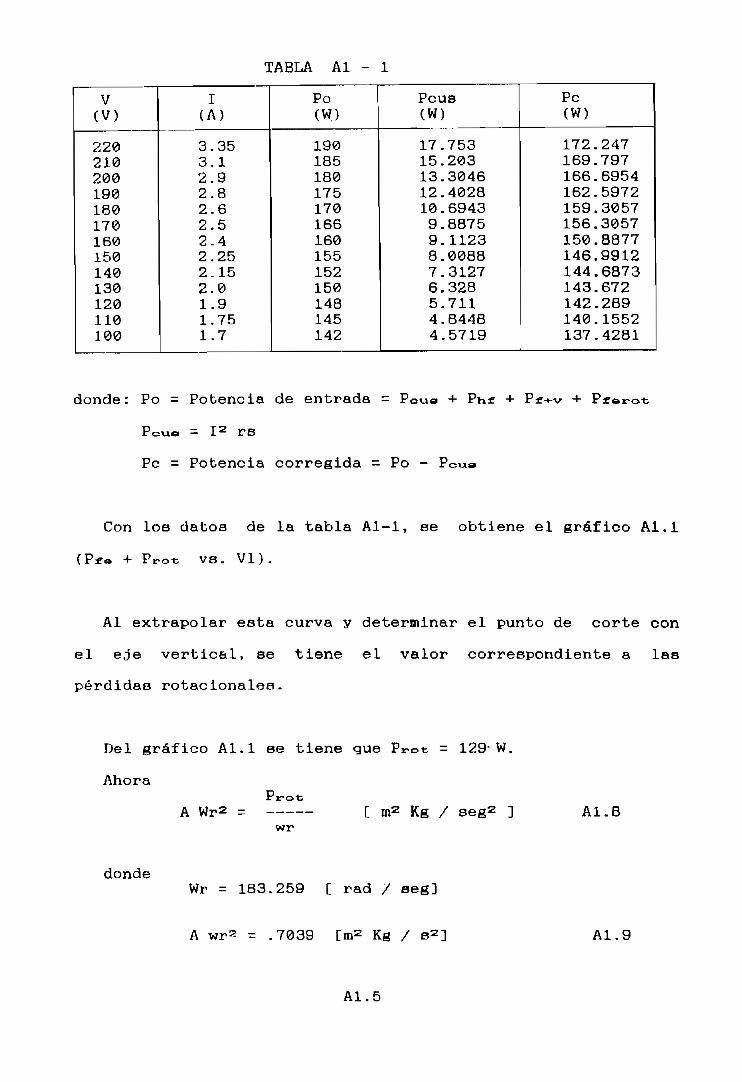
TABLA Al - 1
V(V)
220210200190180170160150140130120110
100
I(A)
3.353.12.92.82.62.52.42.252.152.01.91.751.7
Po(W)
190185180175170166160155152150148145142
Pcus(W)
17.75315.20313.304612.402810.69439.88759.11238.00887.31276.3285.7114.84484.5719
Pe(W)
172.247169.797166.6954162.5972159.3057156.3057150.8877146.9912144.6873143.672142.289140.1552137.4281
donde: Po =
Povu
Pe =
Potencia de entrada = Poua + Pnr + P*-*-v +
= I2 rs
Potencia corregida = Po - Pcua
Con loe datos de la tabla Al-1, se obtiene el gráfico Al.l
« + P^ot vs. VI).
Al extrapolar esta curva y determinar el punto de corte con
el eje vertical, se tiene el valor correspondiente a las
pérdidas rotacionales.
Del gráfico Al.l se tiene que Prot = 129-W.
AhoraProt
A Wr2 = C m2 Kg /wr
Al. 8
dondeWr = 183.259 [ rad / seg]
A = .7039 Kg / Al.9
Al.5
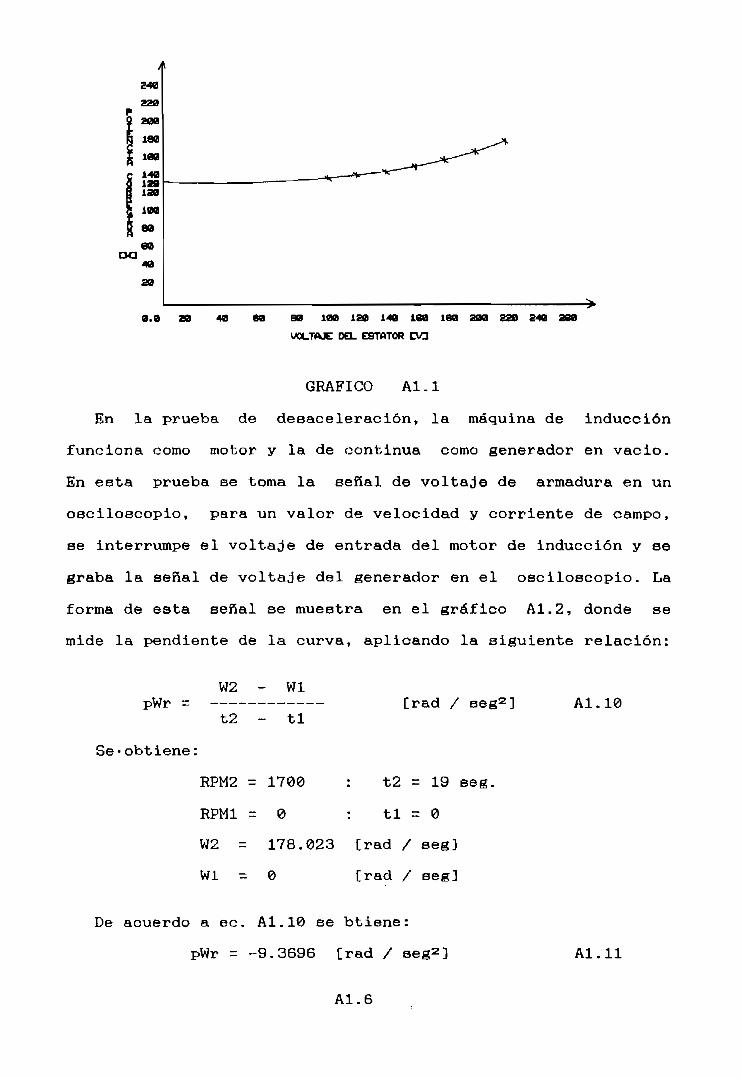
DO
240
220
sea190
iao140129120
1WJ
80
eo40
20
0.0 20 40 80 B0 100 120 140 ISO 180 200 220 240 260
VOLTAJE DEL ESTATOR CV3
GRÁFICO Al.l
En la prueba de desaceleración, la máquina de inducción
funciona como motor y la de continua como generador en vacio.
En esta prueba se toma la señal de voltaje de armadura en un
osciloscopio, para un valor de velocidad y corriente de campo,
se interrumpe el voltaje de entrada del motor de inducción y se
graba la señal de voltaje del generador en el osciloscopio. La
forma de esta señal se muestra en el gráfico Al.2, donde se
mide la pendiente de la curva, aplicando la siguiente relación:
W2 -pWr =
Se* obtiene:
t2
RPM2 =
RPM1 :
W2 -
Wl =
Wl
ti[rad / seg2] Al. 10
1700 : t2 = 19 seg.
0 : ti = 0
178-023 [rad / seg]
0 [rad / seg]
De acuerdo a ec. Al.10 se btiene
pWr = -9.3696 [rad / Al. 11
Al. 6
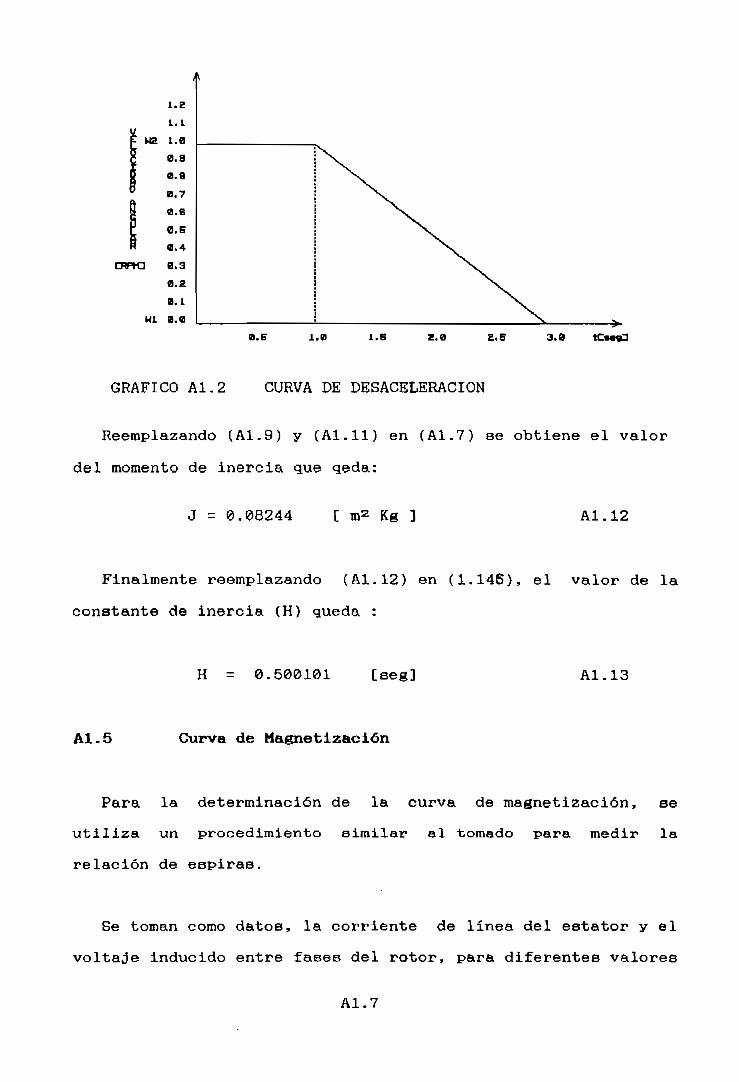
l.E
1.1
wa i.a0.a0.8
0.7
a.e0.50.4
OVK3 0.3
0.2
a. iMi 0.0
0.B 1.0 1.6 2.0 2.5 3.0
GRÁFICO Al.2 CURVA DE DESACELERACIÓN
Reemplazando (Al.9) y (Al.11) en (Al.7) se obtiene el valor
del momento de inercia que qeda:
J = 0.08244 [ Kg ] Al. 12
Finalmente reemplazando (Al.12) en (1.146), el valor de la
constante de inercia (H) queda :
H = 0.500101 [seg] Al. 13
Al.5 Curva de Magnetización
Para la determinación de la curva de magnetización, se
utiliza un procedimiento similar al tomado para medir la
relación de espiras.
Se toman como datos, la corriente de linea del estator y el
voltaje inducido entre fases del rotor, para diferentes valores
Al.7

de la primera. Puesto que el modelo desarrollado es por fase,
se tiene que transformar los valores medidos a valores de fase
con las siguientes ecuaciones:
ILT-P —
-T3Al.14
V«Vf =
-T3
Se calcula el voltaje de fase del rotor referido al estator,
con la ecuación:
Vf' = a Vf Al. 15
TABLA Al.2
IL (A)
1.01.21.41.61.82.02.42.83.43.84.14.65.46.27.08.09.010. p
VL (V)
52.761.872.984.991.898.4115.8128.6145.8153.7159.2164.5172.0180.0186.0196.0203.0207.0
If (A)
0.577350.692820.808290.923761.039231.154701.385641.616581.962992.193932.367132.655813.117693.579574.041454.618805.196155.77350
Vf (V)
30 . 4263535.6802442.0888349.0170353.0007556.8112666.8571674.2472484.1776688.7387391.9141694.9741199.30424103.92304107.38715113.16065117.20210119.5115
Vf- (V)
82.226996.42549113.74464132.46803143.23399153.53186180.68080200.65242227.48928239.81553248.39710256.6660268.36871280.85099290.21269305.81553316.73751322.97864
Curva de Magnetización
En base a la tabla Al. 2, se calculan las concatenaciones de
fludo sin saturación y con saturación, de la siguiente forma:
If Xm
K Vf'
Al. 16
Al. 17
Al.8

donde
K : es tomado de la región lineal, en la cual se
cumple que $m = fm* cuyo valor es K = 0.799
Finalmente se determina 6x, de la manera siguiente:
Óx = Al.18
Todos los valores calculados de fm ,
en la tabla siguiente.
, 8x se presentan
TABLA Al.3
tm(V)
60.47472.56984.66496.759108.854120.854145.139169.329205.613229.803247.945278.183326.563374.943423.322483.797544.272604.746
fm*(V)
65.7877.1490.99105.974114.587122.824144.544160.521181.991191.852198.717205.328214.685224.630232.197244.737253.385258.358
6x(V)
0.5958.80823.62237.95149.22872.855111.878150.313191.125239.060290.887346.388
fm*(P.u.)
0.2990.3500.4130.4810.5200.5580.6570.7290.827
: 0.8720.9030.9330.9751.0211.0551.1121.1511.174
6x(P.u.)
0.00270.0400.10730.17250.22370.33110.50850 . 68320.86871.08661.32221.5744
Datos de la curva de Magnetización
En base a la tabla Al.3, se obtiene la curva
que se presenta en el gráfico Al-3.
6x =
Aproximando la curva del gráfico Al-3 a una recta se obtiene
la función lineal:
Al. 9 I

2.B
2.4
2.2
a.ai.a1.8
1.4
1.2
1.0
o.e0.6
a.40.2
0.0 0.1 0.2 0.3 0.4 0.6 0.8 0.7 0.8 0.8-961.0 1.1 1.2
i
GRÁFICO Al.3 Curva 6x vs. f m*
6x = PCV + PR fin*
donde
PCV : punto de corte de la recta con el eje vertical.
PR : pendiente de la recta.
Se determina el valor de fmc = . 0.96 y la ecuación de la
recta queda de la siguiente forma:
6x = - 7.056 + 7.35 tm*
Tanto PR como fmc , son utilizados como datos que deben
ingresarse en la simulación digital.
Al. 10
A P É N D I C E A2
Medida de los Parámetros de la Linea de Alimentación y del
Motor de Corriente Continua.
A2.1 Medida de los parámetros de la linea de alimentación.[16]
Para el cálculo de la impedancia de la línea de alimentación
que conecta a la máquina de inducción con la barra infinita, se
toman en cuenta los siguientes enlaces:
1.- Enlace que conecta la mesa de trabajo #11 del Laborato-
rio de Máquinas con el tablero de control del laboratorio
realizado con conductor NQ 10 AWG de 2.3 mm de diámetro y
30 metros de longitud.
2.- Enlace entre el tablero de control y el autotransformador
(220 V - 504 V) con dos conductores NQ 2 AWG de 6.5 mm de
diámetro y 10 metros de longitud.
3.- Enlace desde el autotransformador al tablero principal de
distribución con dos conductores NQ 2 AWG de 6.5 mm de
diámetro y 10 m. de longitud.
4.— Enlace entre el tablero principal de distribución y el
transformador principal (acometida) con dos conductores NQ
2/0 de 12 metros de longitud.
Con estos datos, se calculan las impedancias respectivas
A2.1

para cada conductor, que son sumadas a las impedancias del
transformador y autotraneformador. Así se obtienen los siguien-
tes valores:
Conductor NQ 10 AWG
Conductor NQ 2 AWG
Conductor NQ 2 / 0
Transformador
Autotransformador
RL
0.1161
0.0061
0.0018
0.002
0.20312
XL
0.0016
0.0009
0.0099
0.16627
0.329125 d 0-17867 Q
el valor en por unidad de la impedancia de línea es:
ZL p.u. = 0.006046 + j 0.003282
Características del Transformador
ELIN
Conexión DY5
170 KVA
ALTA
6300 - 6150 V.
6000 - 5700 V.
BAJA 231 - 133 V.
Impedancia 3.95 %
A2.2
A2_2 Medida de los Parámetros del Motor de Corriente Contí
nua [13].
A2.2.1 Medida de Kf.
Este valor se obtiene haciendo funcionar a la máquina de
continua como generador. Se aplica una corriente de campo If a
una determinada velocidad y se mide el voltaje generado Va en
vacio . Los valores obtenidos son:
Kf [V s / A]
Kf 1 = ?
Kf2 = ?
If [A]
0.3
0.4
R.P.M.
1870
1810
Va [V]
109
108
Aplicando:
VaKf r: A2.1
If Wr
se tiene:
Kfl = 1.85510
Kf2 = 1.42448
haciendo un valor promedio se tiene:
Kf = 1.63979 [V s / A]
A2.2.2 Medida de Ra.
Este valor se obtiene realizando una prueba de carga con la
máquina de continua funcionando como generador. Se aplica una
corriente de carga If a una determinadad velocidad , se mide el
voltaje generado Va y la corriente de carga la. La relación que
A2.3

determina la resistencia de armadura Ra ee dada por la siguien-
te igualdad:
Kf If Wr - VaTDQ — _________________ A O OX\o. — f\¿, . ¿t
la
los valores medidos son:
If = 0.4 [A] ;
R.P.M. = 1710
Va = 114.5 [V]
la = 3.5 [A]
Reemplazando en A2.2 se obtiene:i
Ra = 0.84439 Q I
A2.2.3 Medida de La
El valor de La se lo obtiene, graficando en el osciloscopio
el transitorio de corriente que ee produce al aplicar un
voltaje en la armadura de la máquina.
La respuesta transitoria para la corriente en esta prueba
esta determinada por la siguiente expresión:
i(t) = (V / R) ( 1 - e-CR/La>ti) ¿2.3
donde
R = Rx + Ra ; Rx = 1 Q
El valor de ti es determinado de acuerdo al transitorio de
corriente cuyo valor es 7 mseg.
A2.4
Realizando operaciones en la ecuación de corriente A2.3, se
llega a determinar la siguiente expresión para La:
La = ti ( Ra 4- Rx ) A2.4
Reemplazando valores se obtiene:
La - 12.91 mH.
A2.5

A P É N D I C E A 3
MANUAL DE USO DEL PROGRAMA
El programa digital desarrollado en el presente trabajo
permite simular el funcionamiento del generador de inducción
en estado estable y transitorio.
El lenguaje de programación utilizado es el Quick Basic, que
permite optimizar el tiempo de ejecución del programa y aprove-
char de las varias opciones, que ayudan en el proceso de solu-
ción.
El programa es desarrollado para que pueda ejecutarse en los
computadores IBM PC :XT, AT, IBM PS ó compatibles que tengan
640 Kilobytes de memoria RAM como mínimo, que dispongan de
tarjeta gráfica sea MGA también referida como Hércules, CGA ó
VGA. Cuando se dispone de la tarjeta gráfica Hércule, se debe
correr primeramente un programa emulador que para el caso del
Quick Basic es el archivo QBHERC.COM.
El programa consta de un archivo con la extensión . BAS, que
se constituye en el programa fuente y desde donde se da origen
a los distintos subprogramas desarrollados.
El programa no genera archivos de datos que puedan ser
leidos en otros programas. Para graficar las formas de onda de
las variables del sistema se corre primeramente el programa
Pizazz con el archivo ejecutable PZ.COM, el cual es utilizado
A3.1
para pasar gráficos mostrados en la pantalla del minitor a un
impresor.
El ingreso al programa Quick Basic se lo realiza con el
archivo QB.COM, luego de lo cual se carga el archivo TESIS1.BAS
ejecutándolo con la instrucción Shift - F5.
El programa ha sido desarrollado de forma que trabaje en
forma interactiva con el usuario, esto se lo hace mediante un
menú Principal, un submenú de Simulaciones y un submenü de
Gráficos, que permiten seleccionar distintas opciones.
Antes de realizarse el ingreso al menú principal, el progra-
ma pide el ingreso de los parámetros en por unidad de las
máquinas de inducción y de continua, que se realizan directa-
mente a través del teclado ó desde un archivo de datos.
1.- Descripción de la función que realizan las distintas
opciones del Menú Principal.
A.- Simulaciones.- Esta opción permite ingresar a un submenú
de simulaciones, que detalla las varias opciones a ser proba-
das.
B_- Datos de la máquina de Inducción.- Esta opción permite
presentar los datos de placa de la máquina de inducción, asi
como los datos obtenidos apartir de las pruebas de vacio y de
rotor bloqueado.
A3.2
C.- Cambiar datos de la máquina de Inducción.- Con esta
opción se puede ingresar nuevos datos de la máquina de induc-
ción, reemplazando a los anteriores.
D.- Datos de la máquina Motriz»— De idéntica forma a la
opción A, se presentan los parámetros del motor de corriente
continua en por unidad, obtenidos de las pruebas de laborato-
rio .
E.- Cambiar datos de la máquina Motriz.- Esta opción permite
el ingreso de nuevos parámetros reemplazando a los anteriores.
F.- Hacer impresión de resultados.- Esta opción permite
imprimir los resultados numéricos de la simulación escogida y
de todas las partes del programa en las cuales se obtenga
resultados posibles de impresión, pudiéndose repetir las
impresiones que sean necesarias.
G.- Finalizar el programa.- Con esta opción se finaliza la
ejecución del programa no sin antes hacer la confirmaciónt
debida.
2.- Descripción de la función que realizan las distintas
opciones del eubmenú de Simulaciones.
La saturación magnética del núcleo como la conexión de
capacitores a los terminales del estator, hace necesario que en
las opciones consideradas dentro del submenú de simulaciones se
tome en consideración primero estos puntos, dando la posibili-
A3.3
dad de incluirlos o no en la simulación con el ingreso de los
respectivos parámetros.
A.— Generador en estado estable.— Mediante esta opción se
hace el cálculo de corrientes, voltajes, torques, deslizamien-
to, flujo de potencia activa y reactiva desde el generador a la
barra infinita , para lo cual se pide el ingreso de los paráme-
tros de la impedancia del alimentador y de la velocidad a la
que se quiere opere la máquina, a más de los indicados ante-
riormente.
B.- Cortocircuito Trifásico.- Esta opción permite simular
esta condición anormal de funcionamiento para lo cual se tienen
que calcular condiciones iniciales (que lo constituyen los
valores obtenidos en estado estable), para la integración de
las ecuaciones diferenciales que conforman el modelo matemáti-
co.
!¡
i
Obtenido el comportamiento estable, se pide escoger la
variación o no del torque de la máquina motriz Tm, en el caso
de ser afirmativo se tiene que ingresar el voltaje de armadura
del motor de continua. Siguiendo con el desarrollo se ingresa
el ángulo en el cual se produce la falla, el mismo que puede
ser en el voltaje o la corriente de la fase a.
Idéntico procedimiento se tiene con las siguientes opciones:
C.- Cortocircuito fase - tierra.
D.- Cortocircuito dos fases - tierra.
E.- Cortocircuito dos fases.
A3.4
F.- Apertura y Reconexión de Fases.- El desarrollo para esta
opción es similar a los casos anteriores. Las condiciones
iniciales necesarias en la integración de las ecuaciones
diferenciales de la reconexión, lo constituyen los últimos
valores de concatenaciones de flujo, corrientes rotóricas,
velocidad y torques integrados en el instante anterior inmedia-
to a la reconexión. El tiempo de desconexión de la máquina se
pone en consideración al usuario dentro de límites estableci-
dos, el mismo que varia de acuerdo a las condiciones de funcio-
namiento de la máquina.
3.- Descripción del Submenú Gráficos.
Las opciones que presenta este submenú ofrece la posibilidad
de observar las formas de onda que las distintas variables del
sistema presentan en el estado estable y transitorio.
Las opciones consideradas haceh referencia a corrientesi
eetatóricae y del alimentador, voltajes de estator y barra
infinita, torques motriz y electromagnética, potencia activa y
velocidad rotórica.
La forma de onda se la puede apreciar en el instante anteri-
or y posterior al que se produce la falla. En el caso de tener
los capacitores en la simulación, el tiempo de observación
posterior a la falla es mínimo debido a que el tiempo de
computación es muy largo.
El tiempo escogido para graficar la onda, comprende 40
A3.5
milisegundos anterior a la falla y el tiempo posterior a la
falla va desde los 150 milisegundos hasta el timpo que fue
escogido para integrar las ecuaciones diferenciales. Cuando se
tienen capacitores el tiempo va desde 45 milisegundos , pudién-
dose mostrar hasta tres ciclos de la forma de onda aproximada-
mente .
Las opciones además dan la posibilidad de mostrar en la
pantalla dos curvas de las variables del sistema, de escoger el
tiempo posterior a la falla para graficar, así como de presen-
tar datos como: tipo de falla estudiada, valores base de los
gráficos, ángulo de falla, valor del capacitor.
Finalmente mediante una opción se permite regresar al menú
principal, no sin antes confirmar, puesto que esto implica la
pérdida completa de datos de la simulación realizada.
A3.6

B I B L I O G R A F Í A
1.- ADKINS B., " The General Theory of Electrical Machines
Ed. tercera, Ed. Chapman and Hall Ldd, London 1972.
2.- FITZGERALD A. E., KINGSLEY C. H., KUSKO A-, " Teoría y
Análisis de las Máquinas Eléctricas ", Ed. Hispano Europea,
Barcelona 1980.
3.- THALER G. C., WILCOX M. L-? " Máquinas Eléctricas: Estado
Dinámico y Permanente ", Ed. primera, Ed. Limusa, México
1974.
4.- STEVENSON WILLIAN, " Análisis de Sistemas Eléctricos de
Potencia ", Ed. Me Graw - Hill, México 1979.
5.- CONTÉ S. D., CARL DE BOOR, " Análisis Numérico Elemental ",
Editorial Me Graw - Hill, Méxiéo 1979.
6.- Enciclopedia CEAC de Electricidad, " Máquinas Motrices,
Generadores de Energía Eléctrica ", Ediciones CEAC S.A.,
Barcelona 1972.
7.- DE MELLO F. P., FELTES J. W., HANNETT L. N., WHITE J. C.,
" Aplication of Induction Generators in Power Systems ",
IEEE Transactions on Powers and Systems, Vol. PAS - 101,
No. 9, pp 3385 - 3393, September 1982.
8.- TSAO T. C., TSANG N. F., " The Squirrel - Cage - Induction
Generator for Power Generation ", AIEE Transactions,
Vol 51, pp 793 - 795 , September 1951.
9.- BARKLE J. E., FERGUSON R. W., " Induction Generator Theory
and Aplicatton ", AIEE Transactions, Vol 73, pp 12 - 19,
Febrary 1954.
10.- PARSONS JOHN R., " Cogeneration Application of Induction
Generatore ", IEEE Transactions on Industry Applications,
Vol. 1A - 20, No. 3, PP 497 - 503, May / June 1984.
11.- PONCE RUBÉN, " Operación Asimétrica de la Máquina Trifá
sica de Inducción ", EPN, Quito 1985.
12.- POZO MAURICIO, " Modelo Digital de la Máquina Trifásica de
Inducción con Rotor Bobinado, Jaula y Doble Jaula de
Ardilla para Estudio transitorio ", EPN, Quito 19B9.
13.- SALAZAR GUSTAVO, " Modelación Digital de un Generador de
Inducción en Estado Dinámico ", EPN, Quito 1990.
14.- RIVERA FREDDY, " La Máquina de Inducción como Generador ",
EPN, Quito 1987.
15.- BONILLA ÁNGEL, " Transitorios en la Reconexión de Motores
de Inducción ", EPN, Quito 1981.
16.- MANCERO FERNANDO, " Comportamiento Dinámico de Motores de
Inducción con Capacitores Serie y Paralelo ", EPN, Quito
19B3.
Recommended