UNIVERSIDAD POLITÉCNICA DE MADRID
ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA INDUSTRIAL
PUESTA EN MARCHA DE UN SISTEMA DE MEDICIÓN DE
HUMEDAD Y TEMPERATURA EN UN INVERNADERO
TRABAJO FIN DE MASTER
Autor: Carlos Enrique Loor Loor
Tutores: Dra. Cecilia García Cena Dr.
Dr. Basil Mohammed Al-Hadithi
Madrid 2013

II
PENSAMIENTO
Cambiar de horizontes, cambiar de método de vida y de atmósfera, es provechoso a la
salud y a la inteligencia
Gustavo Adolfo Bécquer

III
DEDICATORIA
Dedico este Trabajo Fin de Máster a mi mayor fortaleza IVONNE que con su astucia es mi
consejera, mi apoyo económico, amiga incondicional, mi gran amor, mi esposa. A mis
hijos; la alegría e inspiración de mis días JEAN CARLO e IANS ENRIQUE, quienes con su
viveza, espontaneidad e inteligencia se convirtieron en mis cómplices y me exigen dar
más de mí. A mi pequeña y dulce SAMANTHA, por quien se me dilata el universo, con su
ternura engrandece el amor que necesito para soportar la distancia que en las noches me
derrota "mi tan amada hija".
A mis maestros por haber sido mis guías e impulsores, y en especial a mis tenaces tutores
CECILIA y BASIL, quienes me envían de vuelta con una armadura más dura que el acero al
campo de batalla de la vida profesional.
IV
AGRADECIMIENTOS
Este Trabajo Fin de Master se realizó bajo la dirección de los profesores Dra. Cecilia García
Cena y Dr. Basil Mohammed Al-Hadithi a ellos mi más sincero agradecimiento por su
empeño y por su ayuda en mis más profundos desalientos para llegar a la meta y
proyectarme a un futuro muy esperanzador.
Cabe señalar que para realizar este Máster en España, se concretó gracias a la
colaboración del gobierno de Ecuador, a través de la Secretaría Nacional de Educación
Superior Ciencia y Tecnología SENESCYT, a ellos, mi más sincera gratitud.
Sin el apoyo moral y espiritual de mi familia, mi esposa, mis hijos, mis padres adoptivos
Manuel y Pepina, a mi madre Piedad a mis hermanos a mi primo Henry y su esposa Lupe,
no hubiera sido posible mi viaje y mucho menos la culminación de este trabajo, va para
ellos mi reconocimiento y el más profundo de mi agradecimiento.
Y por último a mis compañeros y amigos Washington, Pablo, José Manuel, Arquímedes,
Juan Carlos y Meliton hiperactivos, competitivos, talentosos y muy trabajadores, me
brindaron su mano amiga y sin egoísmo; muy espontáneos y emotivos fueron mis piernas
y brazos en muchos momentos del peregrinar académico....pues a ellos mis hermanos o
¿por qué no? mis hijos, los llevare por siempre en mi agradecido corazón.
V
INDICE DE CONTENIDO
PENSAMIENTO ....................................................................................................................... II
DEDICATORIA ........................................................................................................................ III
AGRADECIMIENTOS .............................................................................................................. IV
INDICE DE CONTENIDO .......................................................................................................... V
INDICE DE FIGURAS............................................................................................................. VIII
INDICE DE TABLAS................................................................................................................ XII
RESUMEN ............................................................................................................................ XIII
CAPÍTULO 1 ............................................................................................................................ 1
1 INTRODUCCIÓN .............................................................................................................. 1
1.1 Marco de trabajo .................................................................................................... 1
1.2 Estructura del trabajo ............................................................................................. 3
CAPÍTULO 2 ............................................................................................................................ 4
2 ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES .. 4
2.1 Antecedentes históricos de los invernaderos. ........................................................ 4
2.2 Estado del arte de los modelos matemáticos para invernaderos. ......................... 8
2.3 Antecedentes contextuales: el invernadero del laboratorio de la EUITI. ............ 13
CAPÍTULO 3 .......................................................................................................................... 16
3 ANALISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO ................ 16
3.1 Variables de estado que se consideran. ............................................................... 16
3.2 Modelo dinámico de la temperatura interior de invernadero ............................. 16
3.2.1 Energía útil disponible en invernadero ......................................................... 17
3.2.2 Balance de energía para el volumen de aire del interior .............................. 18
3.3 Modelo dinámico de la humedad en el interior de invernadero ......................... 25
3.4 Particularización del modelo general al modelo del invernadero SIGrAL. ........... 27
VI
3.5 Análisis teórico de la linealización ....................................................................... 31
3.6 Linealización del modelo matemático no lineal del sistema SIGrAL .................... 33
CAPÍTULO 4 .......................................................................................................................... 40
4 ARQUITECTURA HARDWARE Y SOFTWARE PARA DETERMINAR LAS SEÑALES DE
ENTRADA – SALIDA DEL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL .................... 40
4.1 Arquitectura hardware. ........................................................................................ 40
4.1.1 Descripción del sensor de temperatura IR MLX90614 .................................. 40
4.1.2 Descripción del sensor de humedad relativa HIH-4000-002 ......................... 43
4.1.3 Descripción de la placa ARDUINO UNO ......................................................... 44
4.2 Arquitectura software de SIGrAL. ......................................................................... 46
4.3 Arquitectura software del sistema sensorial ASSS. .............................................. 47
CAPÍTULO 5 .......................................................................................................................... 51
5 IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL ..... 51
5.1 Diseño, ejecución y recogida de datos de los experimentos................................ 51
5.2 Identificación de los parámetros del modelo ...................................................... 60
5.2.1 Experimento 1 ............................................................................................... 62
5.2.2 Experimento 2 ............................................................................................... 62
5.2.3 Experimento 3 ............................................................................................... 64
5.2.4 Experimento 4 ............................................................................................... 67
5.2.5 Experimento 5 ............................................................................................... 69
5.2.6 Experimento 6. .............................................................................................. 72
CAPÍTULO 6 .......................................................................................................................... 77
6 ANÁLISIS COMPARATIVO ............................................................................................. 77
6.1 Modelos de temperatura ...................................................................................... 77
6.2 Modelos de humedad ........................................................................................... 79
VII
CAPÍTULO 7 .......................................................................................................................... 84
7 CONCLUSIONES ............................................................................................................ 84
BIBLIOGRAFIA ...................................................................................................................... 88
ANEXOS ................................................................................................................................ 91
A. ANEXO 1: Pasos de construcción del invernadero SIGrAL ........................................... 91
B. ANEXO 2: programa residente en el ARDUINO UNO ................................................... 94
C. ANEXO 3: programa procesamiento en MATLAB ........................................................ 96
D. ANEXO 4: datos del sensor MLX90614 ....................................................................... 101
E. ANEXO 5: datos del sensor HIH-4000-002 ................................................................. 111
VIII
INDICE DE FIGURAS
Figura 2.1. Invernadero SIGrAL vista desde la parte frontal. .............................................. 14
Figura 3.1. Evolución de la temperatura del aire y del suelo del interior del invernadero
respecto de la del aire exterior. Fuente (Castilla Prados, 2007). ......................................... 17
Figura 3.2. Representación esquemática de los flujos implicados en el balance de energía
térmica de un invernadero. ................................................................................................. 19
Figura 3.3. Representación esquemática de los flujos implicados en el balance de vapor de
agua del aire. ....................................................................................................................... 25
Figura 3.4. Proceso de linealización de un sistema con modelo no lineal. .......................... 31
Figura 3.5. Diagrama de bloques del modelo lineal de SIGrAL representado en el espacio
de estado. ............................................................................................................................ 35
Figura 3.6. Polos y ceros de la función de transferencia teórica de la temperatura. .......... 37
Figura 3.7. Polos de la función de transferencia de la humedad absoluta. ........................ 38
Figura 4.1. El MLX90614. ..................................................................................................... 41
Figura 4.2. Vista superior del MLX90614. ............................................................................ 42
Figura 4.3. El HIH=4000-002 de Honeywell. ........................................................................ 43
Figura 4.4. Descripción de los terminales del HIH-4000-002. .............................................. 44
Figura 4.5. Descripción de la Placa ARDUINO UNO Fuente: (Enríquez Herrador, 2009). .... 45
Figura 4.6 Diagrama de conexión de los sensores con el ARDUINO UNO y la PC. ............. 46
Figura 4.7.Diagrama de flujo del programa que corre en el ARDUINO UNO y LabVIEW. ... 48
Figura 4.8. Panel Frontal del programa SIGrAL.vi. .............................................................. 49
Figura 4.9. Diagrama de bloques del programa SIGrAL.vi. ................................................. 50
Figura 5.1. Modelo de identificador de parámetros de un sistema. ................................... 52
Figura 5.2. Señal del sensor de humedad relativa sin potencia de entrada. ....................... 53
Figura 5.3. Señal del sensor de temperatura sin potencia de entrada. ............................... 54
Figura 5.4. Señal del sensor de humedad sin filtrar (negro) y filtrada (azul). .................... 55
IX
Figura 5.5. Señal del sensor de temperatura. ...................................................................... 56
Figura 5.6. Señal del sensor de humedad sin filtrar (negro) y filtrada (azul). ..................... 57
Figura 5.7. Señal del sensor de temperatura. ...................................................................... 57
Figura 5.8. Señal del sensor de humedad relativa sin filtrar (negro) y filtrada (azul). ........ 58
Figura 5.9. Señal del sensor de temperatura. ...................................................................... 58
Figura 5.10. Señal del sensor de humedad sin filtrar (negro) y filtrada (azul). ................. 59
Figura 5.11. Señal del sensor de temperatura. .................................................................... 59
Figura 5.12. Señal del sensor de humedad sin filtrar (azul) y filtrada (rojo). ..................... 60
Figura 5.13. Señal del sensor de temperatura. .................................................................... 60
Figura 5.14. Modelo de la humedad con un polo. ............................................................... 62
Figura 5.15. Modelo de la humedad con dos polos. ............................................................ 62
Figura 5.16. Modelo de la humedad con tres polos. ........................................................... 63
Figura 5.17. Modelo de temperatura con un polo. ............................................................. 63
Figura 5.18. Modelo de la temperatura con dos polos. ...................................................... 64
Figura 5.19. Modelo de la humedad con un polo. ............................................................... 64
Figura 5.20. Modelo de humedad con dos polos. ................................................................ 65
Figura 5.21. Modelo de humedad con tres polos. ............................................................... 65
Figura 5.22. Modelo de temperatura con un polo. ............................................................. 66
Figura 5.23. Modelo de temperatura con dos polos. .......................................................... 66
Figura 5.24. Modelo de la humedad con un polo. ............................................................... 67
Figura 5.25. Modelo de humedad con dos polos. ................................................................ 67
Figura 5.26. Modelo de humedad con tres polos. ............................................................... 68
Figura 5.27. Modelo de temperatura con un polo. ............................................................. 68
Figura 5.28. Modelo de temperatura con dos polos. ......................................................... 69
Figura 5.29. Modelo de la humedad relativa con un polo. .................................................. 69
X
Figura 5.30. Modelo de humedad con dos polos. ................................................................ 70
Figura 5.31. Modelo de humedad con Tres polos. .............................................................. 70
Figura 5.32. Modelo de temperatura con un polo. ............................................................. 71
Figura 5.33. Modelo de temperatura con dos polos. .......................................................... 71
Figura 5.34. Modelo de la humedad relativa con un polo. .................................................. 72
Figura 5.35. Modelo de humedad con dos polos. ................................................................ 72
Figura 5.36. Modelo de humedad con tres polos. ............................................................... 73
Figura 5.37. Modelo de temperatura con un polo. ............................................................. 73
Figura 5.38. Modelo de temperatura con dos polos. .......................................................... 74
Figura 6.1.Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) para la temperatura el experimento 4. ....................................................................... 77
Figura 6.2. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la temperatura para el experimento 5. .................................................................. 78
Figura 6.3.Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la temperatura para el experimento 6. .................................................................. 79
Figura 6.4. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la humedad relativa para el experimento 4. .......................................................... 80
Figura 6.5. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la humedad relativa para el experimento 5. .......................................................... 81
Figura 6.6. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la humedad relativa para el experimento 6. .......................................................... 82
Figura A.1. Ensamblando la estructura. .............................................................................. 91
Figura A.2. Instalando los sensores. .................................................................................... 91
Figura A.3. Estructura de SIGrAL. ........................................................................................ 92
Figura A.4. Altura de la tierra de cultivo. ............................................................................ 92
Figura A.5. Espacio disponible para el crecimiento de las plantas. ..................................... 93
XI
Figura A.6. Ubicación de los sensores. ................................................................................. 93
Figura A.7. Conexión de los sensores. .................................................................................. 93
Figura C.1. Espacio de trabajo con MATLAB. ...................................................................... 96
Figura C.2 Interfaz gráfica de usuario (GUI). ....................................................................... 98
Figura C.3. Ventana para introducir los datos. .................................................................... 98
Figura C.4. Ventana para introducir el modelo de la función de transferencia. ................. 99
XII
INDICE DE TABLAS
Tabla 2.1. Área de invernadero en los países de la Unión Europea. Fuente (Von Elsner, et
al., 2000). ............................................................................................................................... 7
Tabla 2.2. Superficie estimada (en miles de ha) de cultivo protegido en el mundo en el año
2006. Fuente (Castilla Prados, 2007). .................................................................................... 8
Tabla 3.1: Conductividad térmica de algunos materiales de cubierta. Fuente: (Valera, et
al., 2008). ............................................................................................................................. 21
Tabla 3.2: fórmulas empíricas para el coeficiente de convección exterior. Fuente: (Valera,
et al., 2008). ......................................................................................................................... 22
Tabla 3.3: Orden de magnitud de los coeficientes utilizados en los modelos simplificados.
............................................................................................................................................. 28
Tabla 4.1. Descripción de pines del MLX 90614. ................................................................. 42
Tabla 4.2. Descripción de pines del sensor HIH-4000-002. .................................................. 44
Tabla 5.1. Datos de Ta, qa y Pi. ............................................................................................ 53
Tabla 5.2. Datos de Ta, qa y Pi. ............................................................................................ 54
Tabla 5.3. Datos de Ta, qa y Pi. ............................................................................................ 56
Tabla 5.4. Datos de Ta, qa y Pi. ............................................................................................ 57
Tabla 5.5. Datos de Ta, qa y Pi. ............................................................................................ 58
Tabla 5.6. Datos de Ta, qa y Pi. ............................................................................................ 59
Tabla 5.7. Funciones de transferencia para la temperatura. .............................................. 74
Tabla 5.8. Funciones de transferencia para la humedad relativa de uno y dos polos. ....... 75
Tabla 5.9. Funciones de transferencia para la humedad relativa de tres polos.................. 75
Tabla 5.10. Resumen de funciones de transferencia con dos polos. ................................... 76
XIII
RESUMEN
El uso de invernaderos se ha extendido mucho en España y el mundo pero no se ha
encontrado literatura relacionada con invernaderos interiores con iluminación artificial,
por este motivo surge la necesidad de realizar esta investigación y como primer paso
determinar el modelo matemático teórico que refleje el comportamiento experimental
del invernadero construido en el Laboratorio de Investigación y Proyectos Final de Carrera
de la EUITI.
En este estudio se propone un modelo matemático formulado en base a los principales
procesos de transferencia de masa y energía, y luego comparado con modelos estimados
a partir de los datos experimentales recogidos con sensores de temperatura y humedad
mediante un programa desarrollado en LabVIEW como interfaz de usuario y ARDUINO
UNO como tarjeta de adquisición de datos.
Los datos guardados en un archivo de texto por LabVIEW son importados a MATLAB para
ser manipulados con la función ident y la Interfaz Gráfica de Usuario GUI (por sus siglas
en inglés) asociada a dicha función.
CAPÍTULO 1: INTRODUCCIÓN
1
CAPÍTULO 1
1 INTRODUCCIÓN
En este capítulo se expresa una justificación, para posteriormente formular el problema y
plantear el objetivo de esta investigación (Marco de trabajo), describiendo los diferentes
capítulos en los que se compone este Trabajo Fin de Master TFM. (Estructura del trabajo).
1.1 Marco de trabajo.
Un invernadero es una estructura cubierta y abrigada artificialmente para proteger las
plantas del cultivo de las inclemencias de la naturaleza tales como: lluvia, granizo, viento,
plagas, etc, construida con materiales transparentes para aprovechar la luz solar. Sobre
esta instalación se ejerce control en determinados parámetros productivos, como:
temperatura ambiental y del suelo, humedad relativa del aire y humedad del suelo,
concentración de anhídrido carbónico en el aire y cantidad de luz, en valores lo más
cercanos posibles a los valores óptimos para el desarrollo normal de los cultivos dentro
del invernadero.
Los invernaderos generalmente están formados por estructuras o armazones ligeros que
pueden ser de metal, madera y/o de hormigón, sobre la que se asienta una cubierta de
algún tipo de material transparente como: vidrio, polietileno EVA, policarbonato,
polietileno de vinilo, poliéster, etc, con ventanas frontales o laterales y cenitales y puertas
para el ingreso.
España a partir de la década del 60 del siglo veinte ha tenido un enorme auge en la
siembra de cultivos en invernaderos, llegando a cultivar un área de más de seiscientas mil
hectáreas de terreno, ubicándose estas áreas de cultivo principalmente en la Provincia de
Almería.
Pero los niveles de producción por metro cuadrado de superficie no ha seguido el mismo
ritmo de crecimiento llegando a ubicarse en aproximadamente la mitad comparado con
otros países como Holanda e inclusive Israel. El desarrollo alcanzado en estos países se
debe fundamentalmente a la aplicación que ha tenido la evolución de las tecnologías de
información y comunicación de los procesos industriales, que ha permitido que dichos
sistemas se adapten al mercado, mejorando sus niveles de competitividad, elevando su
CAPÍTULO 1: INTRODUCCIÓN
2
eficiencia y permitiendo el desarrollo de controladores de los parámetros que influyen en
el micro clima del invernadero y de esta manera se eliminen costos y desperdicios en el
proceso de producción de cultivos.
Desde el punto de vista científico el desarrollo de modelos matemáticos permite
sintetizar e incrementar el conocimiento que ya se tiene de un sistema. El análisis y
estudio de las variables y los parámetros del microclima de los invernaderos no son la
excepción, pero todo lo desarrollado en relación a los modelos matemáticos de los
invernaderos se refiere a los que están expuestos en el exterior y reciben directamente la
luz solar.
En el Laboratorio de Investigación y Proyectos Final de Carrera de la Escuela Universitaria
de Ingeniería Técnica Industrial EUITI, se ha diseñado un invernadero inteligente interior
con iluminación artificial (ver ANEXO 1) y que en adelante se lo llamará SIGrAL acrónimo
de: Smart Indoor Greenhouse with Artificial Lighting, (por sus siglas en inglés) con el fin de
determinar el modelo matemático para este invernadero cuya única fuente de energía es
la generado por una lámpara LED de 90 [W] y cuatro 4 lámparas alógenas de 70 [W].
El primer paso para el control de dos de los parámetros como son la temperatura y
humedad relativa de SIGrAL, es conocer el modelo matemático que rige dicho sistema.
De lo anterior surge el problema científico: ¿cómo determinar el modelo matemático que
rige los procesos dinámicos de temperatura y humedad del invernadero SIGrAL?, a partir
de lo anterior el objetivo de esta investigación es: determinar el modelo matemático que
rige los procesos dinámicos del invernadero SIGrAL que tome en cuenta la temperatura y
la humedad como parámetros de salida.
Para cumplir con el objetivo se determinan las siguientes tareas:
Determinar el estado del arte de los modelos matemáticos de los invernaderos.
Caracterizar los parámetros del invernadero SIGrAL.
Diseñar el sistema sensorial para la recogida de datos del invernadero SIGrAL.
Determinar experimentalmente los parámetros de SIGrAL.
Comparar los resultados teóricos respecto de los experimentales.
CAPÍTULO 1: INTRODUCCIÓN
3
1.2 Estructura del trabajo.
En correspondencia con lo anterior y para demostrar el cumplimiento del objetivo y
resolver el problema planteado, el TFM está organizado en los siguientes capítulos con
sus correspondientes epígrafes.
Capítulo 1: Introducción. En este capítulo se describe el problema de esta
investigación y se plantean los objetivos de la misma.
Capítulo 2: Antecedentes históricos conceptuales y contextuales. En este capítulo se
describe y se caracterizan brevemente los antecedentes históricos, de los
invernaderos, el estado del arte de los modelos matemáticos y los contextuales.
Capítulo 3: Análisis y modelo matemático del microclima de invernadero. En este
capítulo se presenta el modelo matemático del invernadero considerando primero
las principales variables que intervienen en el mismo, segundo se proponen las
ecuaciones diferenciales de las variables de estado, tercero se analiza el balance de
energía en el volumen de aire interior del invernadero, y por último se propone un
modelo para el invernadero en estudio.
Capítulo 4: Linealización del modelo matemático del invernadero SIGrAL. En este
capítulo se estudia y propone un modelo lineal a partir de la información del capítulo
anterior.
Capítulo 5: Arquitectura Hardware y software para determinar las señales de
entrada – salida del modelo matemático del invernadero SIGrAL. En este capítulo
en primer lugar se describen los componentes electrónicos que sirven para medir los
parámetros de temperatura y humedad relativa del aire y que componen el sistema
sensorial de SIGrAL (SS-SIGrAL) y la forma en la que se conectan, y en segundo lugar
se describe el software utilizado para el mismo sistema sensorial.
Capítulo 6: Identificación de los parámetros del modelo del invernadero SIGrAL. En
este capítulo primero se diseña y se describen los pasos que se llevaron a cabo para
realizar los experimentos que en este caso fueron de 6, y luego se recogen los datos
mostrándolos en las diferentes gráficas y segundo se describe y se usa el toolbox de
identificación de MATLAB para determinar las funciones de trasferencia de las
señales de entrada – salida para cada experimento.
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
4
CAPÍTULO 2
2 ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
Con el propósito de tener una idea clara del contenido de este capítulo se define como
objeto de estudio de investigación a los invernaderos en general, y por otro lado se define
como campo de acción del investigador los modelos matemáticos para resolver el
problema planteado.
Por lo anterior este capítulo se divide en tres partes:
Primero los antecedentes históricos de los invernaderos, que describe la evolución
histórica de los invernaderos y la cantidad estimada de área para dicho cultivo por lo
que se convierte en un factor importante de investigación.
Segundo, el estado del arte de los modelos matemáticos, en la que se hace evidente
el desarrollo de los diferentes modelos que se encuentran en la literatura y
relacionando el campo de acción de investigación con el objeto de estudio, y
Tercero los antecedentes contextuales, en esta parte se describe los componentes
que forman el invernadero SIGrAL.
2.1 Antecedentes históricos de los invernaderos.
Desde la más remota época de la civilización, el cultivo del campo ha proveído de
alimentos al ser humano, los granjeros realizaban sus labores con los más variados
instrumentos agrícolas, pero nada o muy poco podían hacer con las inclemencias del
tiempo o el ataque de plagas y enfermedades.
En los países que se encuentran por arriba del trópico de cáncer y por debajo del trópico
de capricornio el año manifiesta cuatro estaciones con meses de mucho calor (verano) y
meses de mucho frio (invierno), pero en la zona tórrida lo que predomina son las altas
temperaturas, mucha humedad relativa e intensas lluvias en una época del año mientras
que secas en otra época.
De lo anterior surge la necesidad de proteger el cultivo de dichas inclemencias tales como
las bajas y/o altas temperaturas, los daños causados por el viento, de los climas
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
5
sumamente áridos y desérticos, de plagas y enfermedades, de la excesiva radiación y de
la escases o exceso de agua de lluvia (López, et al., 2008).
Los primeros datos documentados de los que se tiene noticias de un control rudimentario
de los cultivos protegidos son los expuestos por el historiador Columella (4 d. C – 70 d. C ),
en la época del imperio romano, durante el reinado del emperador Tiberio César, los
cultivadores empleaban estructuras móviles que se usaban en el cultivo del pepino,
sacándolas al exterior si el clima era propicio o se guardaban bajo cubierta si el clima era
desfavorable, como material de cerramiento se utilizaban láminas de mica y alabastro
(Wittwer & Castilla, 1995). No fue sino hasta la época del renacimiento cuando en
Inglaterra, Holanda, Francia, Japón y China aparecieron los precursores de los
invernaderos actuales, con estructuras muy rudimentarias de madera o bambú, cubierta
con paneles de vidrio o papel aceitado (Enoch, 1999).
En Asia la protección de cultivos se hacía con papel engrasado, en China ya se conocía
desde la Edad Media que el papel engrasado era un material con transmisividad suficiente
para proteger los cultivos. Los agricultores chinos tenían además un conocimiento
empírico de la influencia que ejerce la orientación del invernadero en el microclima
interno (Gonzalez Real & Baille, 2005).
En el transcurso del tiempo en el hemisferio norte de Europa se construyeron
invernaderos cuya cubierta era a una sola agua orientada al sur y con la pared del lado
norte de ladrillo, en ellos se hicieron los primeros intentos de calefacción aprovechando la
gran masa térmica que presenta este tipo de pared. De noche se protegían con mantas de
paja y/o caña como aislantes. Este tipo de protección de cultivo era limitado a jardines
botánicos (Castilla Prados, 2007).
La construcción muy popular de los invernaderos del siglo XVIII motivó como
consecuencia que muchos constructores se dieran cuenta y experimentaran de forma
directa la capacidad que tiene el vidrio de retener el calor solar (Vázquez Espí, 1999),
especialmente en los invernaderos construidos en Inglaterra.
Es en el siglo XIX cuando aparecen los invernaderos con cubierta a dos aguas se
generalizan los cultivos de uva, melocotones, melones, fresas y a finales de este mismo
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
6
siglo se introducen los tomates, una hortaliza que, años antes, se la consideraba
venenosa. (Castilla Prados, 2007).
Es en la primera mitad del siglo XIX que aparecen realmente los primeros cambios
notables en la construcción de invernaderos. Los invernaderos y protecciones temporales
pasan de ser un pasatiempo para ricos a agricultores y campesinos que tenían sus fincas
cercanas a las grandes ciudades de Europa y de América del Norte. Se inventan las
técnicas para fabricar hierro fundido (Enoch, 1999) y se mejoran los métodos de
fabricación del vidrio. Las placas de vidrio pasan de tener pequeñas dimensiones
(13cmx23 cm) a formar paneles de 30 cm de ancho y más del doble de largo (Gonzalez
Real & Baille, 2005). La fabricación de las primeras placas de vidrio con 141 cm de
longitud aparece en Bélgica en 1880 (Enoch, 1999). Consecuentemente, el desarrollo de
invernaderos de vidrio de gran superficie va a ser paralelo al desarrollo de la arquitectura
del hierro y del vidrio.
La expansión de los invernaderos desde Europa a América y Asia se dio muy rápidamente,
ubicándose en las cercanías de las grandes ciudades (Enoch, 1999). Y desde el siglo XX, el
desarrollo económico impulsó, especialmente después de la segunda guerra mundial, la
construcción de invernaderos de vidrio, principalmente en Holanda, superando dicho país
las 5000 ha a mediados del siglo XX, mayoritariamente dedicadas al tomate (Wittwer &
Castilla, 1995).
En Israel con el afán de ahorrar agua y la máxima utilización de la tierra se ha expandido
significativamente la agricultura de invernadero, ésta ha tenido mucho éxito debido al uso
de tecnologías avanzadas y la investigación científica, en los invernaderos israelís la
producción de tomate es de 300 toneladas por hectárea (Rivera, 2007).
El primer uso de polietileno como cubierta de invernadero en los Estados Unidos fue en
1948, cuando el Profesor Emery Myers Emmert (1900) en la Universidad de Kentucky
emplea este material en lugar de vidrio, que era la cubierta de invernadero tradicional y
más costosa. El Dr. Emmert es conocido como el padre de plásticos agrícolas en los EE.UU.
y ha desarrollado el uso de plásticos agrícolas a través de su investigación en
invernaderos, hileras de plantas cubiertas y el acolchado. Más recientemente, en el
noreste de Estados Unidos, el Dr. Otho Wells de la Universidad de New Hampshire jugó
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
7
un papel clave en el desarrollo de técnicas adecuadas de plasticultura para el clima de esa
región y luego ayudó a educar a los productores y colegas acerca de su uso. (Jensen,
2001).
A partir de las investigaciones del profesor Emmert y con la disminución de los costos en
la producción de plástico y la calidad de los mismos para resistir en la intemperie más
tiempo que los usados en primera instancia, los invernaderos con cubierta de plástico se
han popularizado en todo el mundo.
Un análisis de la proporción de invernaderos de vidrio respecto de los de plástico nos
arroja los siguientes datos.
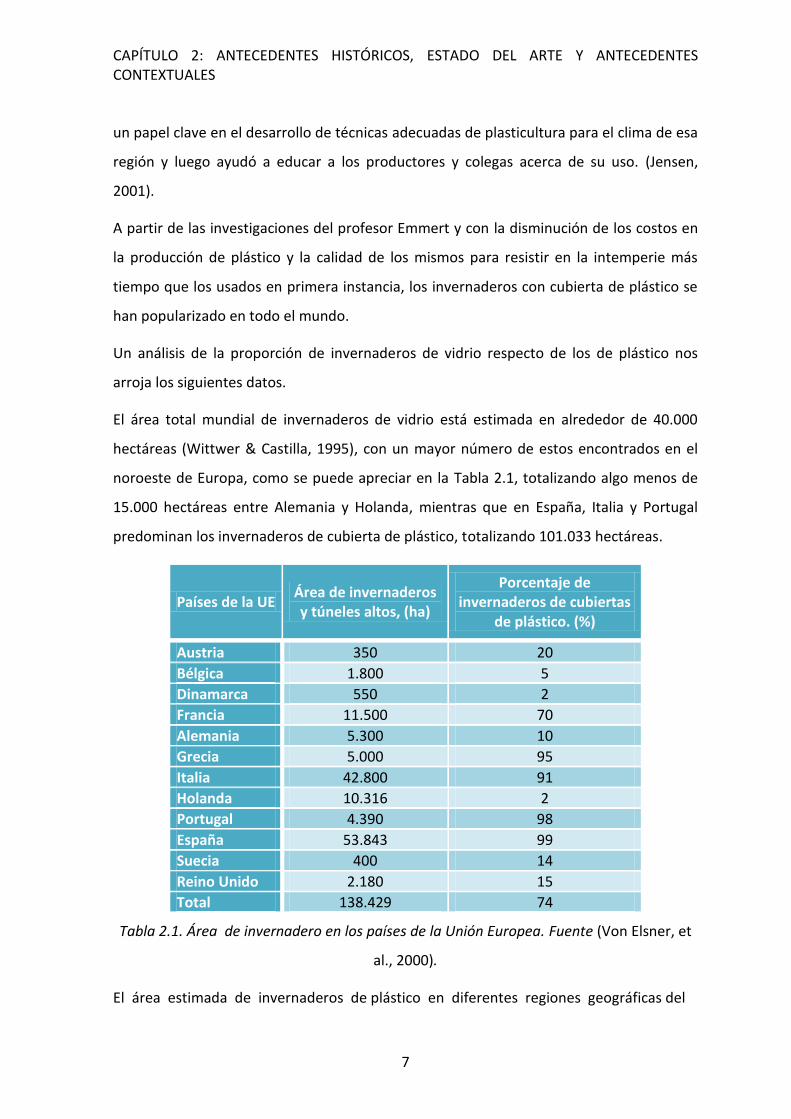
El área total mundial de invernaderos de vidrio está estimada en alrededor de 40.000
hectáreas (Wittwer & Castilla, 1995), con un mayor número de estos encontrados en el
noroeste de Europa, como se puede apreciar en la Tabla 2.1, totalizando algo menos de
15.000 hectáreas entre Alemania y Holanda, mientras que en España, Italia y Portugal
predominan los invernaderos de cubierta de plástico, totalizando 101.033 hectáreas.
Países de la UE Área de invernaderos y túneles altos, (ha)
Porcentaje de invernaderos de cubiertas
de plástico. (%)
Austria 350 20
Bélgica 1.800 5
Dinamarca 550 2
Francia 11.500 70
Alemania 5.300 10
Grecia 5.000 95
Italia 42.800 91
Holanda 10.316 2
Portugal 4.390 98
España 53.843 99
Suecia 400 14
Reino Unido 2.180 15
Total 138.429 74
Tabla 2.1. Área de invernadero en los países de la Unión Europea. Fuente (Von Elsner, et
al., 2000).
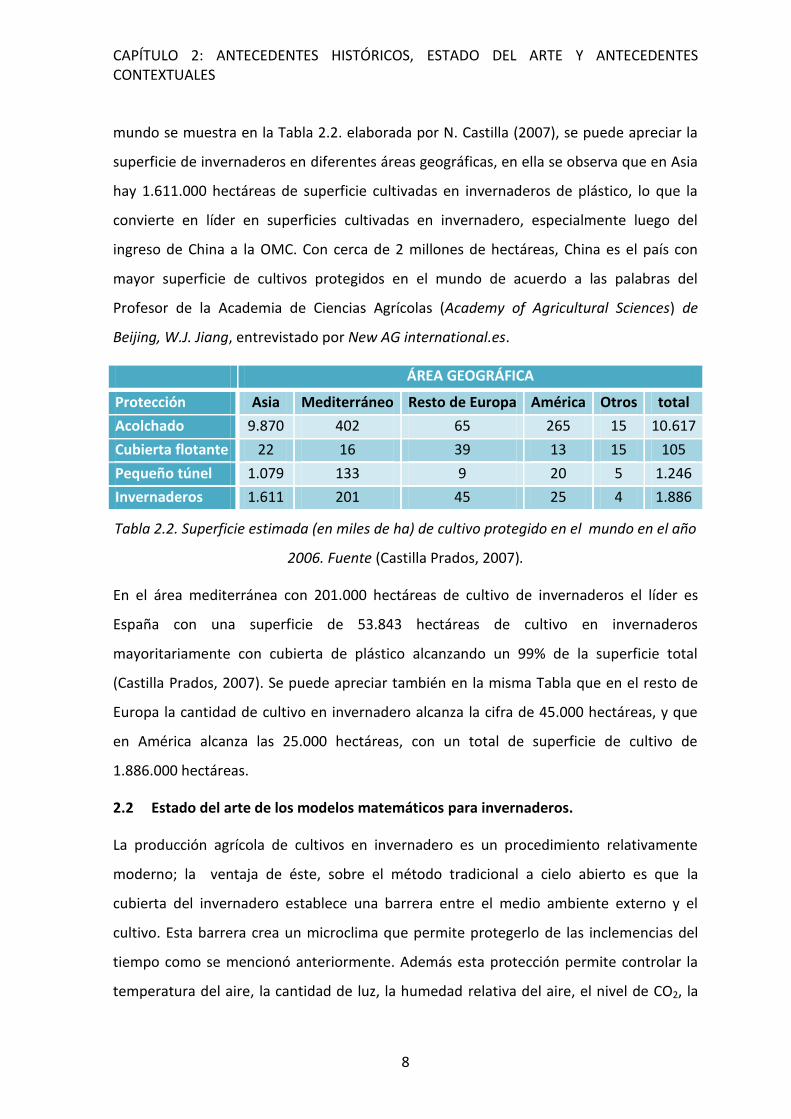
El área estimada de invernaderos de plástico en diferentes regiones geográficas del
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
8
mundo se muestra en la Tabla 2.2. elaborada por N. Castilla (2007), se puede apreciar la
superficie de invernaderos en diferentes áreas geográficas, en ella se observa que en Asia
hay 1.611.000 hectáreas de superficie cultivadas en invernaderos de plástico, lo que la
convierte en líder en superficies cultivadas en invernadero, especialmente luego del
ingreso de China a la OMC. Con cerca de 2 millones de hectáreas, China es el país con
mayor superficie de cultivos protegidos en el mundo de acuerdo a las palabras del
Profesor de la Academia de Ciencias Agrícolas (Academy of Agricultural Sciences) de
Beijing, W.J. Jiang, entrevistado por New AG international.es.
ÁREA GEOGRÁFICA
Protección Asia Mediterráneo Resto de Europa América Otros total
Acolchado 9.870 402 65 265 15 10.617
Cubierta flotante 22 16 39 13 15 105
Pequeño túnel 1.079 133 9 20 5 1.246
Invernaderos 1.611 201 45 25 4 1.886
Tabla 2.2. Superficie estimada (en miles de ha) de cultivo protegido en el mundo en el año
2006. Fuente (Castilla Prados, 2007).
En el área mediterránea con 201.000 hectáreas de cultivo de invernaderos el líder es
España con una superficie de 53.843 hectáreas de cultivo en invernaderos
mayoritariamente con cubierta de plástico alcanzando un 99% de la superficie total
(Castilla Prados, 2007). Se puede apreciar también en la misma Tabla que en el resto de
Europa la cantidad de cultivo en invernadero alcanza la cifra de 45.000 hectáreas, y que
en América alcanza las 25.000 hectáreas, con un total de superficie de cultivo de
1.886.000 hectáreas.
2.2 Estado del arte de los modelos matemáticos para invernaderos.
La producción agrícola de cultivos en invernadero es un procedimiento relativamente
moderno; la ventaja de éste, sobre el método tradicional a cielo abierto es que la
cubierta del invernadero establece una barrera entre el medio ambiente externo y el
cultivo. Esta barrera crea un microclima que permite protegerlo de las inclemencias del
tiempo como se mencionó anteriormente. Además esta protección permite controlar la
temperatura del aire, la cantidad de luz, la humedad relativa del aire, el nivel de CO2, la
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
9
humedad del suelo y hacer un control químico y biológico efectivo para proteger el
cultivo. Así, la producción en invernadero tiene rendimientos más altos que los
tradicionales (Castañeda Miranda, et al., 2007).
Desde el punto de vista científico el desarrollo de modelos matemáticos permite
sintetizar e incrementar el conocimiento que ya se tiene de un sistema, para poder
interactuar con ellos. El análisis y estudio de las variables y los parámetros del microclima
de los invernaderos no son la excepción.
Los modelos matemáticos permiten la regulación, el control y la optimización de los
parámetros del microclima para aumentar la productividad y lograr mayor calidad, con
costos relativamente bajos, los cuales están relacionados con las condiciones climáticas
específicas de cada región en la que se encuentre el invernadero. Como ejemplo se puede
decir que un invernadero como el ubicado en la ciudad de Almería en España, que cuenta
con un clima mediterráneo, le basta con una cubierta de plástico para cumplir con los
requerimientos del cultivo, mientras que en un clima frio como el de Holanda un
invernadero necesita sistemas de calefacción y cubierta de vidrio. Debido a lo anterior los
modelos climáticos para invernadero deben elaborarse explícitamente para cada zona en
la que se localice el invernadero, considerando todos los factores presentes (Leal Iga &
Pissani Zúñiga, 2010).
En general existen tres tendencias de modelización matemática: modelos empíricos,
modelos teleonómicos y modelos mecanicistas (Thorney & Jhonson, 1990). Los modelos
empíricos se fundamentan en la relación entre los datos y las variables observadas
resumiendo la relación entre ellos mediante regresión simple, regresión múltiple o redes
neuronales. Los modelos teleonómicos se formulan explícitamente en términos de
objetivos. Los modelos mecanicistas generalmente son modelos determinísticos, que
mediante un conjunto o sistema de ecuaciones diferenciales ordinarias de primer orden
no-lineales describen el comportamiento de las variables de estado, variables que
representan las propiedades o atributos relevantes del sistema (Thorney & Jhonson,
1990).
Para el caso del microclima del invernadero el modelo mecanicista se basa en términos
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
10
por un lado de leyes físicas, como la conservación de la masa y energía y la primera ley de
la termodinámica y por otro lado de un conjunto de intercambios de naturaleza
fisiológica, que se dan en los cultivos como la fotosíntesis, la transpiración y la respiración
vegetal.
Dentro de los sistemas mecanicistas actualmente hay dos tendencias de los procesos de
transferencia de energía y de masa en los invernaderos. La primera realiza una
descripción pormenorizada de los mecanismos de intercambio energéticos que tienen
lugar a nivel de los diferentes elementos que integran el sistema invernadero tales como:
pared de cubierta, sistema de calefacción, aire interior, cultivo y suelo (Gonzalez Real &
Baille, 2005). Estos modelos son muy utilizados para optimizar los sistemas invernaderos.
El segundo método de abordar el problema consiste en relacionar el invernadero a un
volumen de control delimitado por fronteras y formular los procesos de transferencia de
masa y energía a través de estas fronteras, con este último enfoque, el balance
energético del invernadero se aborda con una o dos ecuaciones diferenciales y un
número limitado de variables de entrada y de parámetros. Este método presenta las
ventajas de, en primer lugar ser simple y en segundo lugar sus parámetros son fáciles de
identificar, permitiendo de esta manera evaluar rápidamente y de manera global el
comportamiento energético del invernadero. Este tipo de modelo llamado también
funcional se utiliza frecuentemente para objetivos de control y regulación de procesos
(Gonzalez Real & Baille, 2005).
De lo anterior se puede concluir que para determinar cualquier modelo se debe pensar en
los objetivos que se plantean. Para objetivos de investigación o de optimización del
diseño, los modelos explicativos detallados son los más aconsejables. Si el objetivo es el
control y la gestión, los modelos funcionales son los más aptos.
De acuerdo a Javier Leal Iga, y otros (2006), dos de las primeras propuestas de
modelación del microclima de invernadero fueron realizadas en la Universidad Agrícola de
Wageningen, Holanda en 1983. El primer modelo fue desarrollado por Alexander Udink
ten Caten (1983) y el segundo modelo fue desarrollado por Gerard Bot (1983). Ambos
modelos consideran ecuaciones para la temperatura dentro del invernadero, e incluyen el
efecto del calentamiento mediante sistemas de calefacción externos y la apertura de
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
11
ventanas para la refrigeración, además consideran al invernadero como un tanque
mezclado perfectamente, en el cual las variables climáticas son uniformes.
El modelo de Bot maneja un gran número de variables de estado: para la temperatura del
aire del invernadero, temperatura de cubierta, temperatura del cultivo y debido a que en
el análisis de la transferencia de energía que se da en el suelo, éste es dividido en algunas
capas, por lo que para cada límite de capa define una temperatura como variable (Leal-
Iga, et al., 2006).
El modelo de Udink ten Cate trata el efecto de la radiación de manera empírica sin
considerar el efecto de la radiación de onda larga de la atmósfera, este modelo se
obtiene por linealización del proceso del clima en invernadero en la vecindad de un punto
de trabajo, y por lo tanto de considerarlo como un proceso de primer orden (Leal-Iga, et
al., 2006).
Posteriormente Van Henten (1994) en su tesis doctoral incorpora respecto al modelo de
Udink ten Cate cálculos más precisos de la respiración, transpiración y fotosíntesis, así
como modelos mejorados para el intercambio de aire con el exterior además de una
ecuación para el crecimiento del cultivo (Leal-Iga, et al., 2006). La calibración la realizó de
manera no formal, cambiando los valores de los parámetros manualmente, mediante
prueba y error, hasta lograr que los valores de las variables estimadas estuvieran lo más
cerca posible de los valores medidos, donde por parámetros se refiere a los coeficientes
involucrados en el modelo matemático (Guzmán Cruz, et al., 2010).
Fran Tap (2000), propone un modelo mejorado a partir del modelo de Van Henten
porque incluye el efecto que tiene la humedad relativa del aire dentro del invernadero y
el intercambio de calor latente por efecto de la renovación del aire por ventilación. En
este caso la calibración del modelo también se hizo en forma manual (Guzmán Cruz, et
al., 2010). Además se consideran cuatro ecuaciones diferenciales una para cada variable
de estado, que son: temperatura del aire, temperatura del suelo, humedad relativa del
aire interior y nivel de concentración de CO2 (Leal-Iga, et al., 2006).
Posteriormente Leal-Iga y otros (2006), basados en los trabajos de Tap tomaron las
mismas cuatro ecuaciones diferenciales modificándolas en cuanto a considerar que la
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
12
densidad del aire no es constante dentro del invernadero, y el efecto que ésta causa
sobre la temperatura del invernadero fue corroborado en el toolbox Simulink de Matlab.
La ecuación diferencial de la temperatura considerando la densidad del aire variante en el
tiempo es mucho más sensible a las variaciones de las entradas al invernadero que el
modelo de Tap, cosa que se corresponde con la realidad (Leal-Iga, et al., 2006).
Los investigadores del Laboratorio de Biotrónica de la Facultad de Ingeniería de la
Universidad Autónoma de Querétaro dirigidos por R. Guzmán-Cruz (2008) desarrollaron
un modelo que pronostica el comportamiento del ambiente interno del invernadero. El
objetivo del trabajo fue el de ajustar el modelo matemático de Tap para el ambiente
interno de un invernadero bajo condiciones climáticas de la región centro de México
(Guzmán Cruz, et al., 2010). Además de hacer la calibración del modelo usando algoritmos
genéticos también se usó mínimos cuadrados y posteriormente los compararon para
determinar el más eficiente.
Se realizó el análisis de sensibilidad, la calibración y la validación del modelo
determinando el coeficiente de correlación (r). Las variables de entrada del modelo
fueron la temperatura y humedad relativa externas, la velocidad del viento y la radiación
solar. Los resultados mostraron que la temperatura estimada en el interior del
invernadero tuvo un mejor ajuste a la temperatura interna medida (r = 0.86) y, la
humedad relativa interna estimada tuvo un menor ajuste a la humedad relativa medida (r
= 0.78) (Guzmán Cruz, et al., 2010).
En Venezuela en el Estado de Mérida en el instituto de Investigaciones Agropecuarias de
la Universidad de Los Andes, los investigadores Leyde Briceño, y otros (2011),
desarrollaron un modelo que lo llamarón SIMICROC. El modelo combina un conjunto de
seis ecuaciones diferenciales no lineales de primer orden, que caracterizan los balances
de energía para la cubierta, el aire interior, el cultivo, el suelo, además el balance de
humedad y concentración de dióxido de carbono para el aire interior del invernadero. El
sistema de ecuaciones se resuelve numéricamente por el método predictor-corrector de
Adams-Bashforth-Moulton con un programa escrito en el lenguaje matemático Fortran
77. La solución describe la variación de la temperatura de la cubierta, de la temperatura
del cultivo, de la temperatura del aire interior, de la temperatura del suelo, de la
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
13
humedad relativa y de la concentración de dióxido de carbono dentro del invernadero, en
su respuesta a las condiciones externas (radiación solar, velocidad, dirección del viento,
temperatura, humedad relativa y concentración de dióxido de carbono).
El modelo fue validado para un invernadero con cultivo de tomate, y con ventilación
natural, cuyos datos teóricos presentan unos coeficientes de correlación promedios
respecto de los datos medidos experimentalmente de, R = 0,88 para la temperatura del
aire interior, R = 0,87 para la temperatura del cultivo, R = 0.97 para la temperatura de la
cubierta, R = 0,97 para la temperatura del suelo y R = 0.79 para la humedad relativa del
aire interior (Briceño Medina, et al., 2011).
2.3 Antecedentes contextuales: el invernadero del laboratorio de la EUITI.
En el Laboratorio de Investigación y Proyectos Final de carrera de la Escuela Universitaria
de Ingeniería Técnica Industrial EUITI se ha diseñado un invernadero inteligente interior
con iluminación artificial (ver ANEXO 1) y que en adelante se lo llamará SIGrAL acrónimo
de: Smart Indoor Greenhouse with Artificial Lighting, (por sus siglas en inglés) con el fin de
determinar el modelo matemático para este invernadero cuya única fuente de energía es
la generada por una lámpara LED de 90 [W] y 4 lámparas alógenas de 70 [W]. El control
de cada una de las lámparas, es un sistema cuyo desarrollo es externo a este Trabajo Fin
de Master TFM.
El invernadero SIGrAL tiene una estructura de metal. Las dimensiones en milímetros son:
alto 1780, ancho 1000 y profundidad 500, de todo este volumen en la parte inferior se
dejó una altura de 280 mm, para el drenaje del agua de las macetas, luego hay un
volumen para alojar las macetas de 300 mm, hay que aclarar que las macetas no están
completamente llenas de tierra de cultivo, por lo que se considera como altura de las
macetas la altura de la tierra.
Posteriormente se tiene un volumen para el desarrollo del cultivo 950 mm de alto en cuya
parte superior se encuentran una lámpara LED de 90 [W] y cuatro bombillas
incandescentes de 70 [W] cada una, y por último un volumen para alojar la circuitería de
control de la lámpara LED y las bombillas incandescentes del invernadero, con una altura
de 250 mm.
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
14
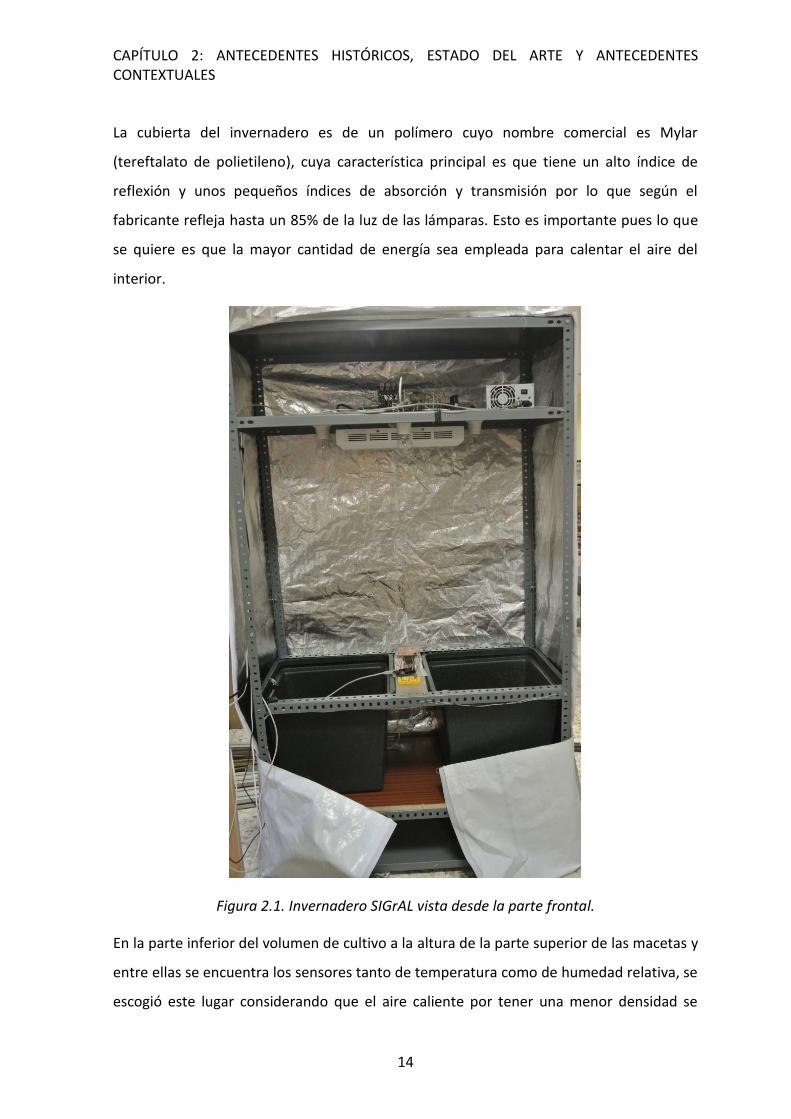
La cubierta del invernadero es de un polímero cuyo nombre comercial es Mylar
(tereftalato de polietileno), cuya característica principal es que tiene un alto índice de
reflexión y unos pequeños índices de absorción y transmisión por lo que según el
fabricante refleja hasta un 85% de la luz de las lámparas. Esto es importante pues lo que
se quiere es que la mayor cantidad de energía sea empleada para calentar el aire del
interior.
Figura 2.1. Invernadero SIGrAL vista desde la parte frontal.
En la parte inferior del volumen de cultivo a la altura de la parte superior de las macetas y
entre ellas se encuentra los sensores tanto de temperatura como de humedad relativa, se
escogió este lugar considerando que el aire caliente por tener una menor densidad se
CAPÍTULO 2: ANTECEDENTES HISTÓRICOS, ESTADO DEL ARTE Y ANTECEDENTES CONTEXTUALES
15
encontrará en la parte superior y por lo tanto el aire en la parte inferior es más frio y es el
que está alrededor de las plantas de cultivo el que afecta los procesos físicos y biológicos
(fisiológicos) de las mismas, para su normal desarrollo.
El invernadero SIGrAL tiene una cubierta frontal de Mylar (tereftalato de polietileno)
como se dijo en párrafos anteriores, que en su perímetro tiene cosido un sistema de
apertura y cierre rápido de velcro para ser unido con las partes laterales y de fondo que
forman una sola pieza de recubrimiento.
La parte frontal está cosida con el resto solo en la parte superior dejando los laterales
para ser unido con velcro con el resto de la cubierta con el propósito poder abrir el
invernadero y tener acceso al interior del mismo cuando sea necesario, la Figura 2.1 nos
da una idea del invernadero SIGrAL.
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
16
CAPÍTULO 3
3 ANALISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
En este capítulo se presenta el modelo matemático del invernadero considerando los
siguientes aspectos:
Se establecen las principales variables de estado del invernadero.
Se proponen las ecuaciones diferenciales de las variables de estado definidas en el
apartado anterior.
Se analiza el balance de energía en el volumen de aire interior del invernadero.
Se propone un modelo para el invernadero de estudio.
3.1 Variables de estado que se consideran.
Las variables más importantes que se controlan en un invernadero son: la temperatura,
la humedad relativa, y el nivel de CO2 del aire interior, además del nivel de luz,
temperatura y humedad del suelo. En este proyecto fin de Máster solamente se van a
considerar las dos primeras por ser las variables que más se ven afectadas por los
procesos de transferencia de masa y energía entre el volumen del aire interior y los
diferentes componentes del invernadero y que están relacionadas entre sí. Por las
consideraciones anteriores, entonces, las variables de estado son: la temperatura (T) y la
humedad relativa (q) del aire del invernadero.
3.2 Modelo dinámico de la temperatura interior de invernadero.
En un invernadero la principal fuente de energía es la radiación solar complementándose
con energía de calefacción si fuera el caso, parte de la energía solar se almacena en el
suelo durante el día. Durante la noche, la fuente de energía proviene del suelo en forma
de radiación infrarroja de onda larga y también complementándose con calefacción si el
caso lo amerita.
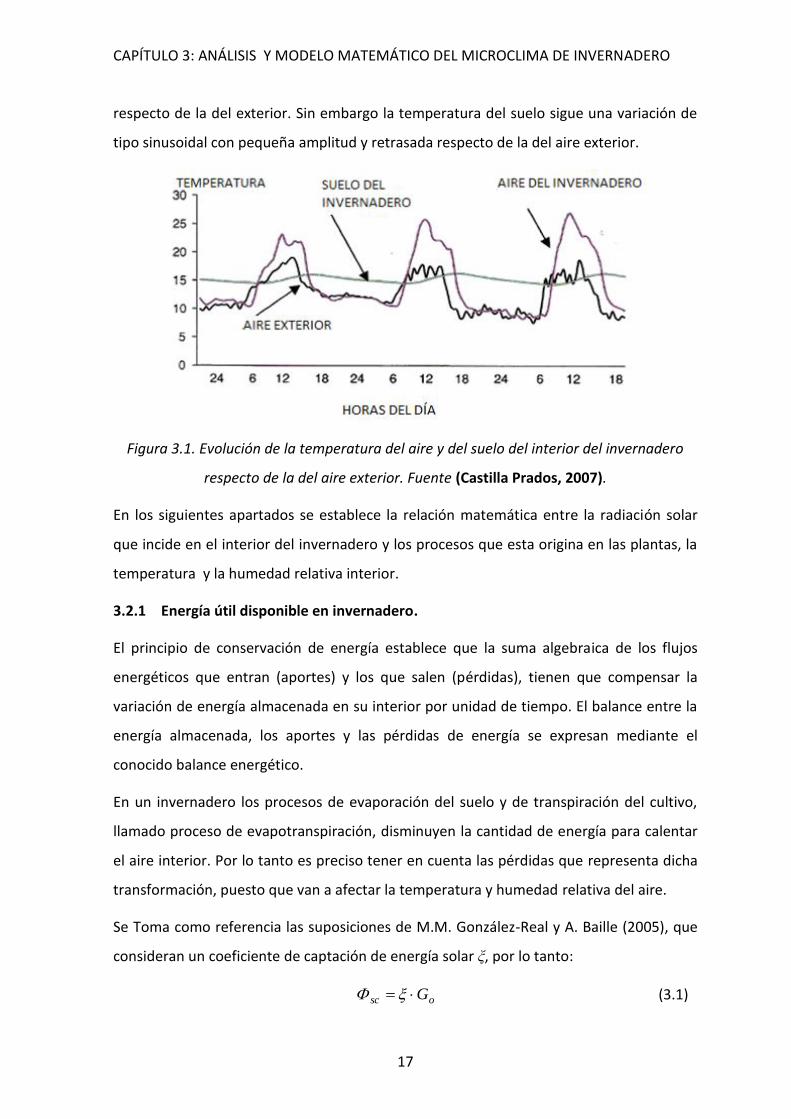
La temperatura de los invernaderos es el resultado del balance energético de los procesos
que dentro del mismo se producen. En la Figura 3.1 se muestra la variación de la
temperatura al interior de un invernadero sin calefacción, en ella se puede observar que
durante la noche la temperatura del aire interior es ligeramente mayor que la del exterior
y durante el día debido al efecto invernadero la temperatura del aire interior es mayor
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
17
respecto de la del exterior. Sin embargo la temperatura del suelo sigue una variación de
tipo sinusoidal con pequeña amplitud y retrasada respecto de la del aire exterior.
Figura 3.1. Evolución de la temperatura del aire y del suelo del interior del invernadero
respecto de la del aire exterior. Fuente (Castilla Prados, 2007).
En los siguientes apartados se establece la relación matemática entre la radiación solar
que incide en el interior del invernadero y los procesos que esta origina en las plantas, la
temperatura y la humedad relativa interior.
3.2.1 Energía útil disponible en invernadero.
El principio de conservación de energía establece que la suma algebraica de los flujos
energéticos que entran (aportes) y los que salen (pérdidas), tienen que compensar la
variación de energía almacenada en su interior por unidad de tiempo. El balance entre la
energía almacenada, los aportes y las pérdidas de energía se expresan mediante el
conocido balance energético.
En un invernadero los procesos de evaporación del suelo y de transpiración del cultivo,
llamado proceso de evapotranspiración, disminuyen la cantidad de energía para calentar
el aire interior. Por lo tanto es preciso tener en cuenta las pérdidas que representa dicha
transformación, puesto que van a afectar la temperatura y humedad relativa del aire.
Se Toma como referencia las suposiciones de M.M. González-Real y A. Baille (2005), que
consideran un coeficiente de captación de energía solar ξ, por lo tanto:
osc G (3.1)
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
18
Donde, Go es la radiación solar incidente [W m-2], que es variable a lo largo del día y cero
en las noches, para simplificar en muchos casos se usa un promedio anual de entre 70 –
100 [W m-2], Φsc representa la energía solar captada, ξ es un número adimensional, que
dependiendo del tipo de cubierta oscila entre 0.7 – 0.8 (Gonzalez Real & Baille, 2005).
Por otro lado la energía solar captada, Φsc, se reparte en tres componentes que son:
Energía sensible que se transfiere por convección al aire del invernadero. Φc.
Energía sensible que se transfiere por conducción al suelo. Φcd.
Energía sensible que se transforma en calor latente (proceso de evapotranspiración).
ΦLsv.
Reemplazando en la ecu. (3.1), tenemos:
LsvcdcoG (3.2)
La energía captada en forma de calor sensible por convección, Φc, es la que va a
contribuir a calentar el aire del invernadero. Por lo tanto, lo que interesa es conocer la
energía sensible útil, teniendo en cuenta las pérdidas que representan el proceso de
evapotranspiración y el flujo de conducción de calor en el suelo.
Lsvcdoc G (3.3)
3.2.2 Balance de energía para el volumen de aire del interior.
En la Figura 3.2 se representan esquemáticamente las componentes del balance de
energía de un invernadero como un volumen de control (el volumen del aire) delimitado
por la pared de cubierta y la masa térmica (suelo-vegetación), formulando los procesos de
transferencia de energía a través de estas fronteras, sin detallar los procesos que
intervienen al interior del volumen de control (Gonzalez Real & Baille, 2005).
Los términos que intervienen en el balance energético de un invernadero se indican en
forma de flujo de energía. Según el primer principio de la termodinámica, la energía
ganada por el sistema se equilibra con la energía perdida por el mismo. Sin embargo
existen muchos autores que consideran una serie de componentes del balance energético
despreciando otros. El modelo que se tomó de referencia es el desarrollado por Wu Xiu-
hua y otros (2011), que presentan la siguiente ecuación de balance térmico para un
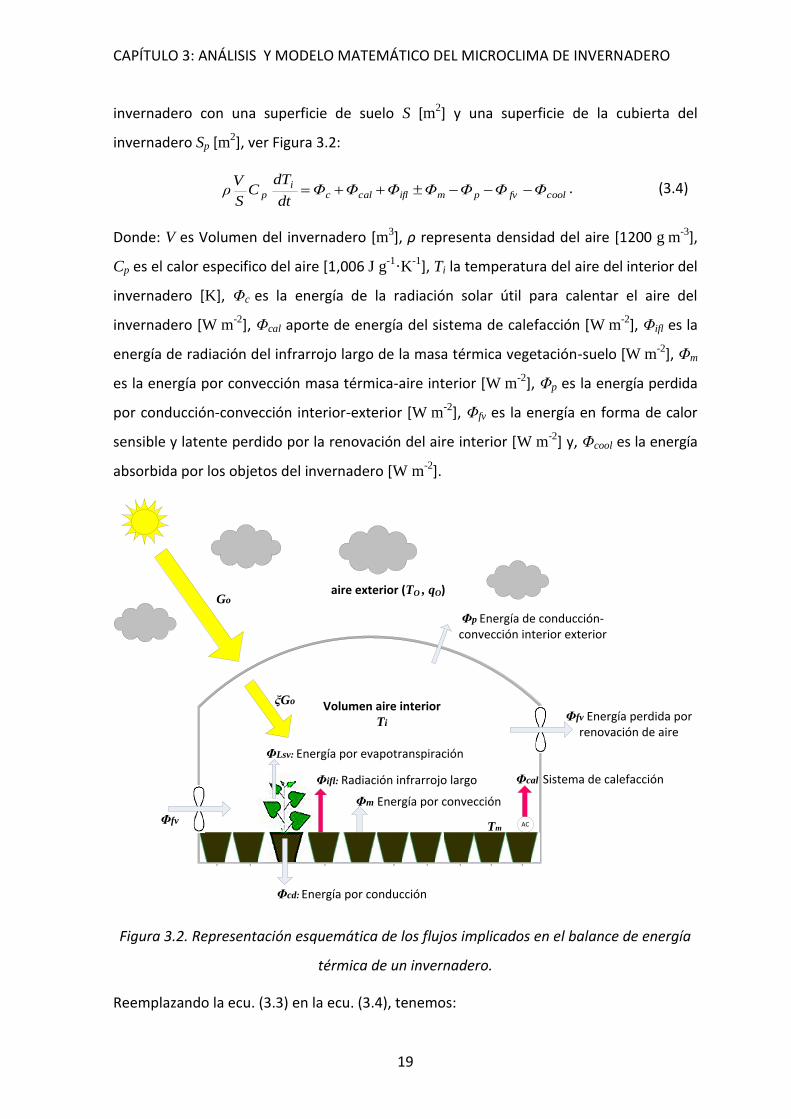
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
19
invernadero con una superficie de suelo S [m2] y una superficie de la cubierta del
invernadero Sp [m2], ver Figura 3.2:
coolfvpmiflcalc
ip Φ ΦΦΦΦΦΦ
dt
dTC
S
Vρ . (3.4)
Donde: V es Volumen del invernadero [m3], ρ representa densidad del aire [1200 g m-3],
Cp es el calor especifico del aire [1,006 J g-1
·K-1], Ti la temperatura del aire del interior del
invernadero [K], Φc es la energía de la radiación solar útil para calentar el aire del
invernadero [W m-2], Φcal aporte de energía del sistema de calefacción [W m
-2], Φifl es la
energía de radiación del infrarrojo largo de la masa térmica vegetación-suelo [W m-2], Φm
es la energía por convección masa térmica-aire interior [W m-2], Φp es la energía perdida
por conducción-convección interior-exterior [W m-2], Φfv es la energía en forma de calor
sensible y latente perdido por la renovación del aire interior [W m-2] y, Φcool es la energía
absorbida por los objetos del invernadero [W m-2].
aire exterior (TO , qO)
Volumen aire interiorTi
AC
ξGo
Go
Φcal Sistema de calefacción
Φm Energía por convección
Φfv
Φcd: Energía por conducción
Φfv Energía perdida por renovación de aire
Φp Energía de conducción-convección interior exterior
ΦLsv: Energía por evapotranspiración
Φifl: Radiación infrarrojo largo
v v v vvv v
Tm
v
Figura 3.2. Representación esquemática de los flujos implicados en el balance de energía
térmica de un invernadero.
Reemplazando la ecu. (3.3) en la ecu. (3.4), tenemos:
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
20
coolfvpmiflcalLsvdcoi
p Φ ΦΦΦΦΦΦGdt
dTC
S
Vρ (3.5)
Comparadas con las demás energías, las pérdidas de energía que se transfiere por
conducción al suelo Φcd y la energía absorbida por los objetos del invernadero Φcool, son
muy pequeñas, por ello serán despreciadas (Wu & Lei, 2011), quedando la ecu. (3.5)
finalmente reducida a la siguiente expresión:
fvpmiflcalLsvoi
p ΦΦΦΦΦGdt
dTC
S
Vρ (3.6)
El término Φm, que representa la energía por convección masa térmica-aire interior
puede ser un aporte o una pérdida. De noche, siendo la temperatura de la masa térmica
superior a la del aire, (Tm > Ti), Φm representa un aporte de energía al volumen de aire.
Sin embargo, de día representa una pérdida (Tm < Ti).
Los términos del lado derecho de la ecu. (3.6) serán analizados uno por uno a
continuación con el fin de establecer la expresión para Ti que es la primera variable que
se va a considerar.
a) Energía perdida por conducción-convección interior-exterior Φp.
Los intercambios de energía por conducción - convección se presentan en todas las
estructuras existentes dentro del invernadero, en este trabajo se consideran las que
ocurren con aire exterior el material de cubierta y el aire interior, dado que es la que más
influye sobre la temperatura interna.
La energía por unidad de superficie de cubierta [m2] y por unidad de tiempo [s], en los
intercambios energéticos por conducción-convección entre el interior del invernadero y el
ambiente exterior, Φp, [W m-2], puede expresarse mediante la ecu. (3.7) (Valera, et al.,
2008):
oicc
p
p TT·KS
SΦ (3.7)
Donde: Ti [K] es la temperatura del interior, To [K] la temperatura del exterior, y Kcc es el
coeficiente global de pérdidas de calor por conducción-convección [W m-2
·K-1] y se
calcula con la siguiente expresión (Valera, et al., 2008):
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
21
ec
c
i
cc
h
1
λ
e
h
1
1K
(3.8)
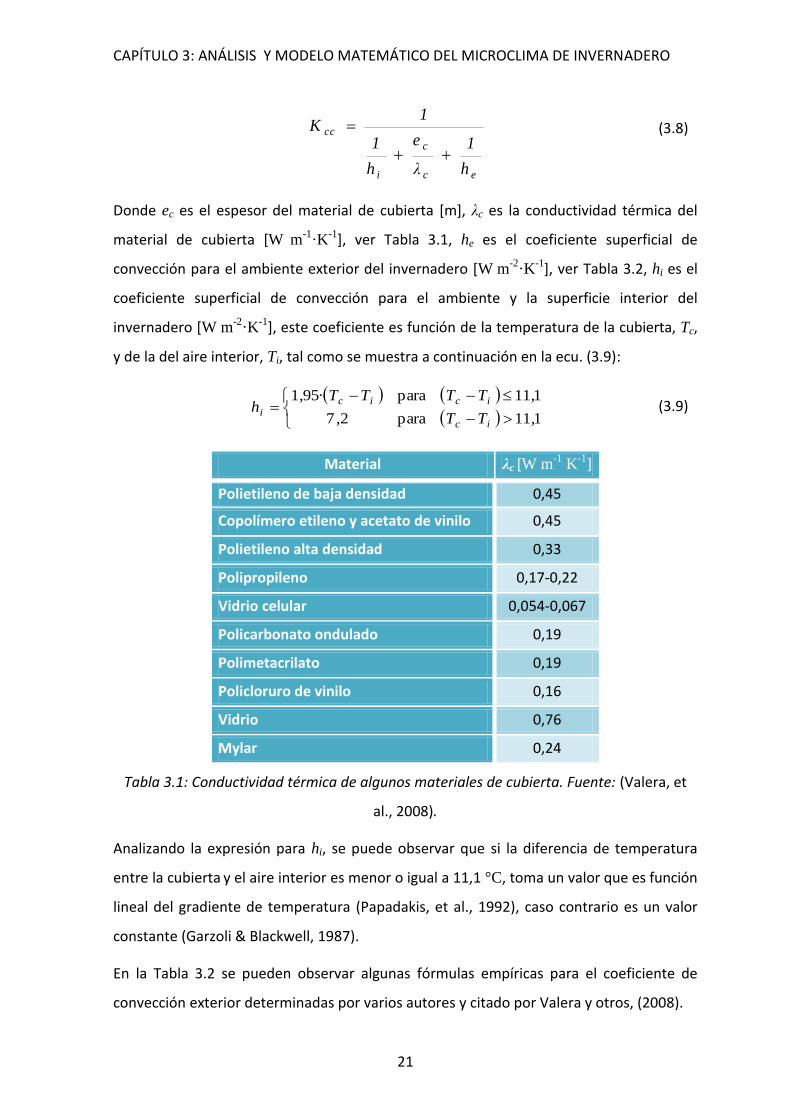
Donde ec es el espesor del material de cubierta [m], λc es la conductividad térmica del
material de cubierta [W m-1
·K-1], ver Tabla 3.1, he es el coeficiente superficial de
convección para el ambiente exterior del invernadero [W m-2
·K-1], ver Tabla 3.2, hi es el
coeficiente superficial de convección para el ambiente y la superficie interior del
invernadero [W m-2
·K-1], este coeficiente es función de la temperatura de la cubierta, Tc,
y de la del aire interior, Ti, tal como se muestra a continuación en la ecu. (3.9):
111para27
111para951
,TT,
,TTTT·,h
ic
icici (3.9)
Material λc [W m-1
K-1
]
Polietileno de baja densidad 0,45
Copolímero etileno y acetato de vinilo 0,45
Polietileno alta densidad 0,33
Polipropileno 0,17-0,22
Vidrio celular 0,054-0,067
Policarbonato ondulado 0,19
Polimetacrilato 0,19
Policloruro de vinilo 0,16
Vidrio 0,76
Mylar 0,24
Tabla 3.1: Conductividad térmica de algunos materiales de cubierta. Fuente: (Valera, et
al., 2008).
Analizando la expresión para hi, se puede observar que si la diferencia de temperatura
entre la cubierta y el aire interior es menor o igual a 11,1 °C, toma un valor que es función
lineal del gradiente de temperatura (Papadakis, et al., 1992), caso contrario es un valor
constante (Garzoli & Blackwell, 1987).
En la Tabla 3.2 se pueden observar algunas fórmulas empíricas para el coeficiente de
convección exterior determinadas por varios autores y citado por Valera y otros, (2008).
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
22
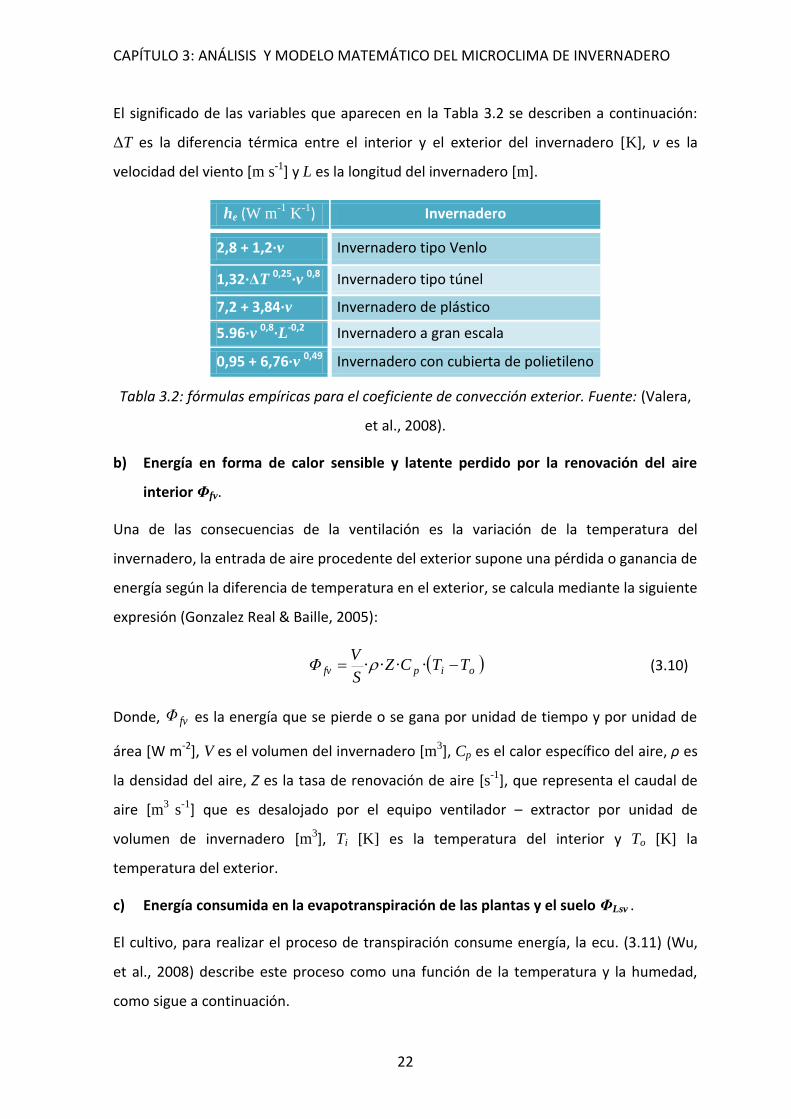
El significado de las variables que aparecen en la Tabla 3.2 se describen a continuación:
ΔT es la diferencia térmica entre el interior y el exterior del invernadero [K], v es la
velocidad del viento [m s-1] y L es la longitud del invernadero [m].
he (W m-1
K-1) Invernadero
2,8 + 1,2·v Invernadero tipo Venlo
1,32·ΔT 0,25·v 0,8 Invernadero tipo túnel
7,2 + 3,84·v Invernadero de plástico
5.96·v 0,8·L-0,2 Invernadero a gran escala
0,95 + 6,76·v 0,49 Invernadero con cubierta de polietileno
Tabla 3.2: fórmulas empíricas para el coeficiente de convección exterior. Fuente: (Valera,
et al., 2008).
b) Energía en forma de calor sensible y latente perdido por la renovación del aire
interior Φfv.
Una de las consecuencias de la ventilación es la variación de la temperatura del
invernadero, la entrada de aire procedente del exterior supone una pérdida o ganancia de
energía según la diferencia de temperatura en el exterior, se calcula mediante la siguiente
expresión (Gonzalez Real & Baille, 2005):
oipfv TT·C·Z··S
VΦ (3.10)
Donde, fvΦ es la energía que se pierde o se gana por unidad de tiempo y por unidad de
área [W m-2], V es el volumen del invernadero [m3], Cp es el calor específico del aire, ρ es
la densidad del aire, Z es la tasa de renovación de aire [s-1], que representa el caudal de
aire [m3 s
-1] que es desalojado por el equipo ventilador – extractor por unidad de
volumen de invernadero [m3], Ti [K] es la temperatura del interior y To [K] la
temperatura del exterior.
c) Energía consumida en la evapotranspiración de las plantas y el suelo ΦLsv .
El cultivo, para realizar el proceso de transpiración consume energía, la ecu. (3.11) (Wu,
et al., 2008) describe este proceso como una función de la temperatura y la humedad,
como sigue a continuación.

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
23
mLsv E (3.11)
Donde LsvΦ es la energía absorbida para la transpiración por unidad de tiempo y por
unidad de área de cultivo [J m-2
·h-1
], λ representa el calor latente de transpiración [J g-1],
Como λ varia levemente dentro de rangos de temperaturas normales, se considera un
valor constante de 2450 [J g-1] (Allen, et al., 2006) y Em representa la intensidad de la
transpiración del cultivo [g m-2
h*1], que se calcula con la siguiente ecuación (Wu, et al.,
2008).
iT
em q·,··k,E ie 15,23x109321 (3.12)
Donde qi es la humedad absoluta del aire interior [g m-3] y ke es el coeficiente de
evaporación [g h-1] el cual está relacionado con la velocidad del aire del interior por
medio de una función f(vair) y se calcula con la siguiente ecuación (Wu, et al., 2008).
aire vf·k ,, 14902230 (3.13)
Reemplazando la ecu. (3.12) en la ecu. (3.11), y expresándola en [W m-2] se tiene:
3600
3,9x101,22.45015,23
iT
eLsv
q···k·Φ
ie
Resolviendo para cada término y ordenando con respecto a Ti y qi, se tiene:
ieT
eLsv ·q·k··kΦ ,, ie 82010185315,23
(3.14)
d) Energía por convección masa térmica-aire interior Φm.
La masa térmica suelo vegetación interactúa con el aire interior mediante el mecanismo
de convección. Se puede formular a través del coeficiente de intercambio debido a la
convección, hm [W m-2
·K-1] y del gradiente de temperatura entre la masa térmica, Tm y el
aire interior Ti de acuerdo con la ecu. (3.15).
immm TTh (3.15)
e) Energía de radiación del infrarrojo largo de la masa térmica vegetación-suelo Φifl.
Todos los cuerpos a temperaturas mayores a cero Kelvin emiten radiación térmica, a
diferencia de la conducción y convección la radiación no necesita un medio de transición

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
24
y puede ocurrir en el vacío, la radiación térmica suele considerarse como un fenómeno
superficial para los sólidos que son opacos a la radiación térmica, como los metales, la
madera y las rocas. El flujo de radiación térmica se modela según la ley de Stefan-
Boltzmann de acuerdo con la ecu. (3.16).
44imifl TT·· (3.16)
Donde: Φifl es la energía por unidad de tiempo y por unidad de área [W m-2], ε es una
constante de proporcionalidad cuyo valor está entre cero y uno llamada emisividad, la
cual depende del material que irradia la energía, que en este caso es el suelo, σ es la
constante de Stefan-Boltzmann [5,67x10-8 W m-2
·K-4], Tm es la temperatura absoluta de la
superficie del suelo [K] y Ti la temperatura del aire interior [K].
En la ecu (3.16) se ha asumido que la emisividad del aire es mucho mayor que la del suelo
y que la temperatura de las paredes del interior de la cubierta es la misma que la del aire
interior.
f) Energía del sistema de calefacción Φcal.
El calor que es necesario suministrar mediante el sistema de calefacción se puede
expresar conforme la ecu. (3.17).
irpcal TT·h (3.17)
Donde hp es el coeficiente de transferencia de calor [W m-2
·K-1], Tr es la temperatura
interior deseada [K]y Ti representa la temperatura del aire interior [K].
Una vez establecidos todos los miembros del lado derecho de la ecu. (6), se reemplazan
en ella las ecs. (3.7), (3.10), (3.14), (3.15), (3.16), (3.17), y se obtiene:
oipoicc
p
immie
Te
irpimoi
p
TT·C·Z··
S
VTT·K
S
S
TTh·q·k,
··k,
TT·hTT··G
dt
dTC
S
Vρ
ie
820
101853 15,23
44
Resolviendo para dTi/dt se obtiene la expresión para la variación de la temperatura que se
muestra en la ecu (3.18).
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
25
oioi
p
pcc
im
p
mi
p
eT
p
e
ir
p
p
i
p
m
p
o
p
i
TT·ZTT·
ρVC
S·K
TT
ρVC
S·h·q
ρVC
S··k,·
ρVC
S··k,
TT·
ρVC
S·hT·
ρVC
S··T·
ρVC
S··G
ρVC
S·
dt
dT
ie
830101853
15,23
44
(3.18)
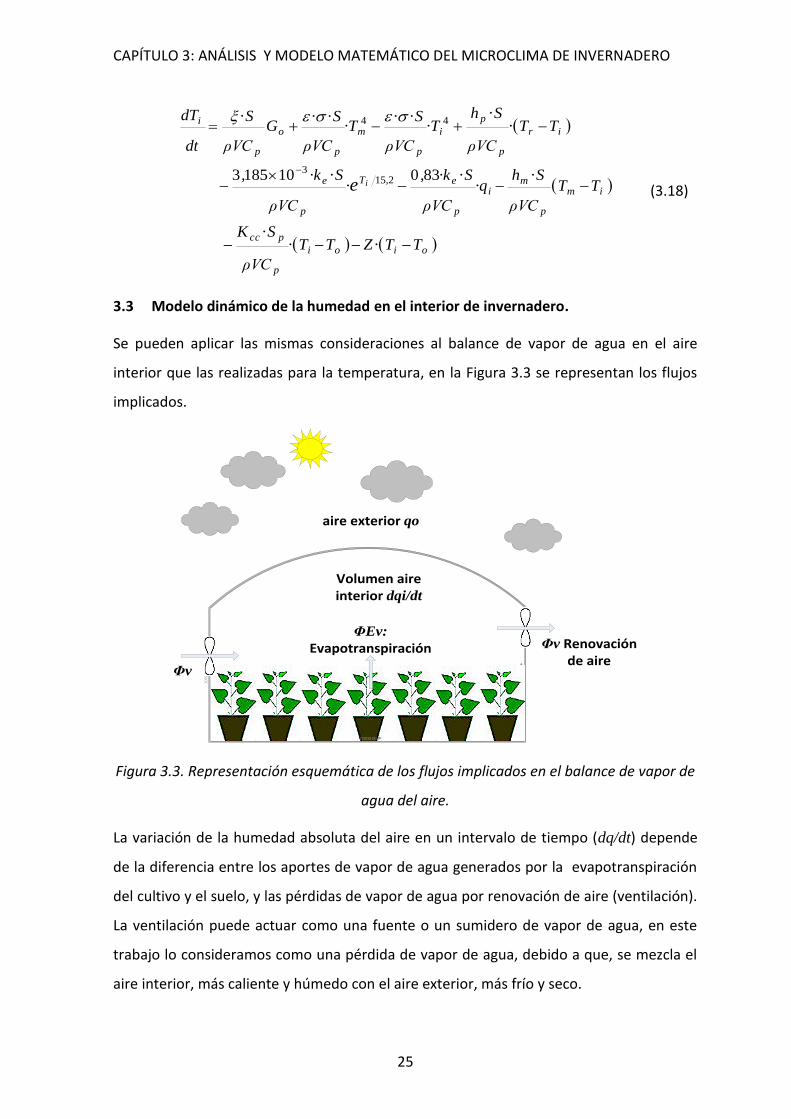
3.3 Modelo dinámico de la humedad en el interior de invernadero.
Se pueden aplicar las mismas consideraciones al balance de vapor de agua en el aire
interior que las realizadas para la temperatura, en la Figura 3.3 se representan los flujos
implicados.
22000.00
1000
0.00
1000
0.00
aire exterior qo
Volumen aire interior dqi/dt
Φv
Φv Renovación de aire
ΦEv: Evapotranspiración
Figura 3.3. Representación esquemática de los flujos implicados en el balance de vapor de
agua del aire.
La variación de la humedad absoluta del aire en un intervalo de tiempo (dq/dt) depende
de la diferencia entre los aportes de vapor de agua generados por la evapotranspiración
del cultivo y el suelo, y las pérdidas de vapor de agua por renovación de aire (ventilación).
La ventilación puede actuar como una fuente o un sumidero de vapor de agua, en este
trabajo lo consideramos como una pérdida de vapor de agua, debido a que, se mezcla el
aire interior, más caliente y húmedo con el aire exterior, más frío y seco.
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
26
El modelo dinámico de la humedad en invernadero que considera lo anterior, asumiendo
que no existe condensación y que no se aporta humedad por otros medios (nebulización
o paneles evaporantes) es como sigue (Wu & Lei, 2011):
oimi qq·Z
V
E·S
dt
dq (3.19)
Donde qo es la humedad absoluta del exterior [g m-3], y qi la humedad absoluta del
interior del invernadero [g m-3].
Sustituyendo la ecu. (3.12) en la ecu. (3.19), se tiene:
oi
i,T
ei qq·Z
q·,k·,V
S
dt
dqie
3600
10x93212153
Resolviendo para Ti y qi y ordenando, tenemos la expresión que se muestra en la ecu
(3.21):
oie,Tei q·Zq
V
S·k,Z
V
S·k·,
dt
dqie
4215
6 1033310x31 (3.20)
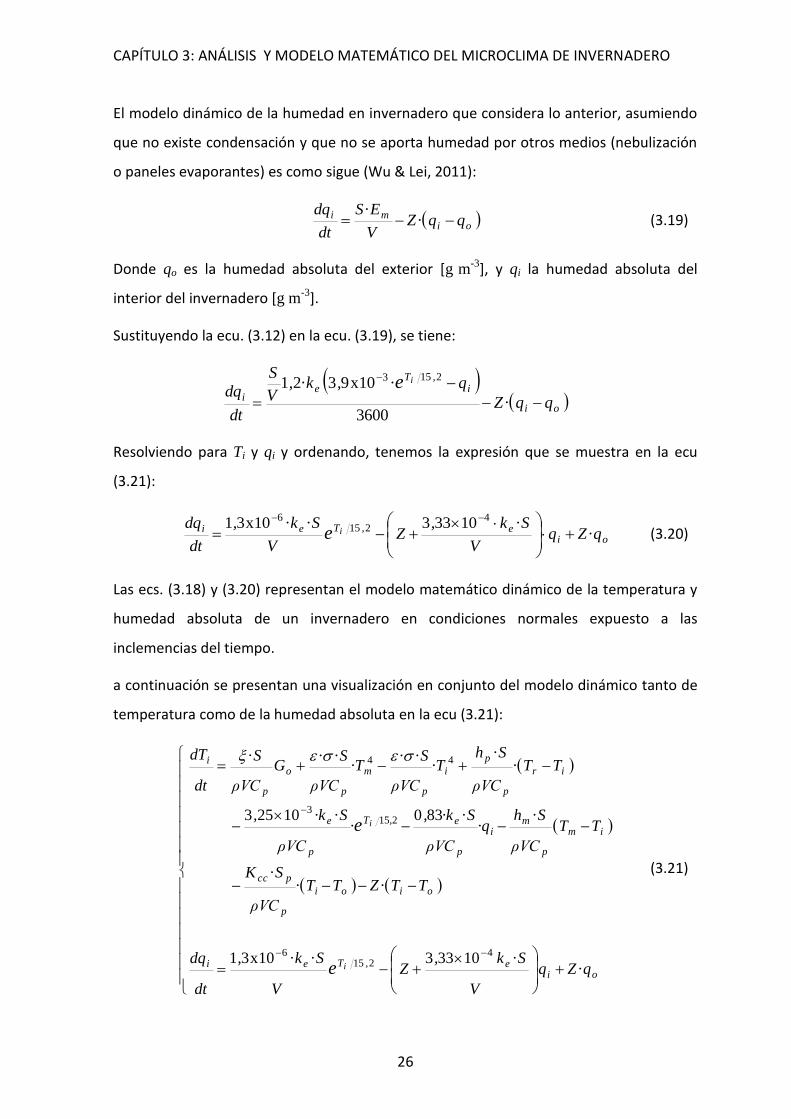
Las ecs. (3.18) y (3.20) representan el modelo matemático dinámico de la temperatura y
humedad absoluta de un invernadero en condiciones normales expuesto a las
inclemencias del tiempo.
a continuación se presentan una visualización en conjunto del modelo dinámico tanto de
temperatura como de la humedad absoluta en la ecu (3.21):
oie,Tei
oioi
p
pcc
im
p
mi
p
eT
p
e
ir
p
p
i
p
m
p
o
p
i
q·Zq
V
S·k,Z
V
S·k·,
dt
dq
TT·ZTT·
ρVC
S·K
TT
ρVC
S·h·q
ρVC
S··k,·
ρVC
S··k,
TT·
ρVC
S·hT·
ρVC
S··T·
ρVC
S··G
ρVC
S·
dt
dT
i
i
e
e
4215
6
15,23
44
1033310x31
83010253
(3.21)
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
27
3.4 Particularización del modelo general al modelo del invernadero SIGrAL.
Para el invernadero SIGrAL del laboratorio tomamos como punto de partida el sistema de
la ecu. (3.21), para particularizar las ecuaciones de las variables de estado temperatura y
humedad absoluta para este caso.
En el invernadero SIGrAL no se va a usar calefacción, por lo que no hay aporte calórico
para aumentar la temperatura, entonces el término que corresponde a la energía del
sistema de calefacción Φcal es cero, tal como lo expresa la siguiente ecuación.
0 ir
p
pTT·
ρVC
S·h
La fuente de energía no es el sol, es una lámpara LED de 90 [W] y 4 bombillos de alógeno
de 70 [W] por lo que el término que involucra Go se anula y en su lugar se reemplaza por
una nueva variable que se llamará Pi y que representa la energía por unidad de área y
unidad de tiempo que suministra la lámpara LED expresada en [W m-2].
El invernadero tiene un área S de 0,5 [m2] para el cultivo y un volumen V de 0,5 [m3], con
estos datos analizamos el coeficiente del término de Tm4 como sigue.
Asumiendo constantes los otros parámetros como la densidad ρ, el calor específico del
aire Cp y la constante de Boltzmann:
11
8
10x697400615021
5010x675,
.,,
,,
ρVC
S··
p
Entonces el término completo presenta la siguiente expresión:
41110x6974 mT,
Si se considera que la temperatura de la superficie del suelo es menor que la temperatura
del aire interior por tener una mayor inercia, como se muestra en la Figura 3.1 y dándole
un valor aproximado de 290 [K], se tiene:
332029010x6974411 ,,
Si el suelo fuera un cuerpo negro perfecto, entonces ε = 1, por lo que se tendría una
contribución de 0,38 [W/m2], este valor es muy pequeño comparado con los 180 [W/m
2]

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
28
que aporta la lámpara LED, por lo que se desprecia esta componente, entonces:
04 m
p
T·ρVC
S··
Se analiza el siguiente término relacionado con la masa térmica:
im
p
m TTρVC
S·h
Reemplazando los valores conocidos para cada una de las constantes de la expresión
anterior tenemos:
Th,TT
.,,
,·hmim
m 410x2848
00615021
50
Observando la Figura 3.1, se aprecia que entre la temperatura del suelo y la temperatura
del aire hay una variación máxima de aproximadamente 10 [°C], por lo que se puede
considerar como hipótesis que una variación de temperatura de 20 [°C] entre la
temperatura del aire y la temperatura del suelo se podría dar en este caso como máximo,
por lo que para la expresión anterior introduciendo este incremento de temperatura
quedaría:
mim
p
m h,TTρVC
S·h 01660
Parámetros Símbolo Valor Unidades
Coeficiente de captación de energía solar ξ 0,6 – 7
Absorción de la radiación solar por la masa térmica
Vegetal poco desarrollado
Suelo con cobertura plástica
αam
αam
0,1 – 0,15
≈ 0,05
Coeficiente de intercambio hm 4 – 5 W m-2
K-1
Conductividad del suelo ks 1,0 – 1,5 W m-1
K-1
Capacidad calorífica de la masa térmica CTm 0,1 – 0,3 MJ/ m-2
K-1
Tabla 3.3: Orden de magnitud de los coeficientes utilizados en los modelos simplificados.
En esta última ecuación el término de convección entre el suelo y el aire depende del

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
29
coeficiente de intercambio hm. Gonzales Real y otros (2005) determinaron el orden de
magnitud de algunos parámetros utilizados en los modelos simplificados de invernaderos.
De acuerdo a los datos presentados en la Tabla 3.3 el coeficiente de intercambio hm está
entre 4 y 5 [W/m-2
·K-1], por lo que se toma el mejor de los casos, entonces:
2-m W0 0830 ,TTρVC
S·him
p
m
Se desprecia este término también, por lo que el sistema de la ecu. (3.21) quedaría
reducido a la siguiente expresión:
oieTei
oioi
p
pcc
i
p
e
T
p
ei
p
i
p
i
q·ZqV
S·k,Z
V
S·k·,
dt
dq
TT·ZTT·ρVC
S·K·q
ρVC
S··k,
·ρVC
S··k,T·
ρVC
S··P
VC
S
dt
dT
i
i
e
e
415,2
6
15,23
4
1033310x31
820
101853
(3.22)
Ordenando la ecu. (3.22) con respecto a Ti y qi, tenemos la ecu (3.23):
oie,Tei
i
p
o
p
pcc
i
p
e
i
p
pccT
p
ei
p
i
q·ZqV
S·k,Z
V
S·k·,
dt
dq
PVC
STZ
ρVC
S·K·q
ρVC
S··k,
TZρVC
S·K·
ρVC
S··k,T·
ρVC
S··
dt
dT
i
i
e
e
4215
6
15,23
4
1033310x31
830
101853
(3.23)
Conocidos los valores de superficie de cultivo S = 0,5 [m2], volumen de aire V = 0,5 [m3],
superficie de convección conducción de la cubierta Sp = 3 [m2] y asumiendo constante la
densidad ρ = 1200 [g m-3], la constante de emisividad del Mylar ε = 0.833 y el calor
especifico del aire Cp = 1,006 [J g-1
·K-1], y si se considera que el invernadero SIGrAL no se
encuentra herméticamente cerrado, y no se va a ventilar, entonces el valor de Z (la tasa
de renovación de aire [s-1]) es de acuerdo a Gonzales Real y otros (2005) para
invernaderos estancos como el del laboratorio de:
s.Z
110173 4

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
30
Si se asume que el coeficiente de pérdidas de calor por conducción – convección es de:
K
.K cc2m
W 472
Y que el coeficiente de evapotranspiración es de:
h
.K e
g 50
Reemplazando en el sistema que representa la ecu. (3.23), todos los valores señalados, se
obtiene la ecu (3.24):
oi,Ti
ioi
iT
ii
q.q,,dt
dq
P,T,·q,
T,T,dt
dT
i
i
e
e
4421510
338
315,210411
10173101731081
1083010591210559
102,591 1066310913
(3.24)
Para una mejor presentación del modelo, y poder facilitar su lectura en lugar de los
coeficientes de los términos de la ecu. (3.24) se usarán las siguientes constantes a0, a1, a2,
a3, a4, b0, b1 y b2, por lo que:
021215
0
543215,2
14
0
qbqbbdt
dq
PaTa·qaTa·aTadt
dT
i,Ti
ioiiT
ii
i
i
e
e (3.25)
Donde:
1110913 .ρVC
S··a
p
o
103
1 10663101853
,ρVC
S··k,a
p
e
32 105912
,Z
ρVC
S·Ka
p
pcc
83 10559
830 ,ρVC
S··k,a
p
e
34 105912
,Z
ρVC
S·Ka
p
pcc
35 10830 ,
VC
Sa
p

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
31
106
10x8110x31
,V
S·k·,b e
o
44
1 1017310333
,
V
S·k,Zb e
42 10173 ,Zb̀
La ecu (3.25) claramente es no lineal, por lo que un primer paso es linealizarla, en las
siguientes secciones se dan las ideas fundamentales y luego se linealiza.
3.5 Análisis teórico de la linealización.
Una gran parte de la teoría desarrollada para el diseño de sistemas de control emplea
modelos matemáticos lineales del proceso que se desea controlar a lazo cerrado. Sin
embargo, el caso que nos ocupa, el sistema SIGrAL exhibe una conducta no lineal.
Una forma simple de resolver esta situación es empleando alguna forma de transformar
el sistema no lineal en uno lineal. De esta manera el modelo linealizado puede ser
empleado para el diseño del sistema de control del modelo no lineal original. Un posible
enfoque para el diseño del sistema de control se muestra en la Figura 3.4.
El estudio de este TFM se centra en los dos primeros bloques, como pasos previos para el
diseño del controlador, de las pruebas del mismo .y comprobación de los resultados para
demostrar la utilidad del modelo y que tan bien se aproxima al modelo real.
Modelo no lineal del sistema
Modelo lineal del sistema
Diseño del controlador
Prueba del controlador
Resultados
Figura 3.4. Proceso de linealización de un sistema con modelo no lineal.
Si se tiene un sistema dinámico no lineal el cual consiste de una variable de entrada (u) y
de dos variables de salida (x1, x2), este sistema está representada por la ecuación, que se
muestra a continuación:
u,x,xf
dt
dx
u,x,xf
dt
dx
2122
2111

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
32
Y se desea aproximar el comportamiento de este sistema no lineal por la de un sistema
lineal alrededor de un punto
___
s u,x,xP 21 el cual es un punto de estado estacionario
del sistema representado por la ecuación anterior.
Empleando la serie de Taylor se realiza una expansión entorno al punto de estado
estacionario Ps al lado derecho de la ecuación anterior (que es la que contiene el término
no lineal) hasta la primera derivada, despreciando las derivadas de mayor orden,
tenemos:
_
P
_
P
_
P
s
_
P
_
P
_
P
s
uuu
fxx
x
fxx
x
fPfu,x,xf
dt
dx
uuu
fxx
x
fxx
x
fPfu,x,xf
dt
dx
sss
sss
222
2
211
1
22212
2
122
2
111
1
11211
1
En virtud de que el punto Ps es estacionario (no existe variación en el dominio del tiempo
de las variables que estamos considerando que para el caso son las variables de entrada
(u) y de salida (x1, x2) por lo tanto se cumple la condición de que la variación de cambio de
fi respecto al tiempo es cero, expresando matemáticamente la idea anterior y
considerando a Ps como punto de estado estacionario, se tiene la expresión que se
muestra a continuación:
0
0
22122
12111
s
___
s
___
Pfu,x,xfdt
dx
Pfu,x,xfdt
dx
Para una mejor manipulación de las ecuaciones se definen nuevas variables como se
puede ver a continuación:
_
.._
.._
uuw
xvxxv
xvxxv
22222
11111
Reemplazando el cambio de variables y sustituyendo la condición de la no variabilidad en
estado estacionario en la ecuación de la expansión de Taylor tenemos:

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
33
wu
fv
x
fv
x
fu,x,xf
dt
dv
wu
fv
x
fv
x
fu,x,xf
dt
dv
sss
sss
PPP
PPP
22
2
21
1
2212
2
12
2
11
1
1211
1
Las ecuaciones anteriores son las ecuaciones lineales de f1 y f2, en función de las variables
de entrada y salidas, estas se pueden representar en forma matricial como se muestra a
continuación:
w
u
f
u
f
v
v
x
f
x
f
x
f
x
f
s
s
ss
ss
P
P
PP
PP
.v
.v
2
1
2
1
2
2
1
2
2
1
1
1
2
1
3.6 Linealización del modelo matemático no lineal del sistema SIGrAL.
Con el criterio anterior es posible linealizar la ecu. (3.25) en la vecindad del punto de
operación Ps(Tr, qr, Pr):
ri
Pi
ri
Pi
rrriiii
ri
Pi
ri
pi
ri
Pi
rrriiii
qqq
gTT
T
gP,q,TgP,q,Tg
dt
dq
PPP
fqq
q
fTT
T
fP,q,TfP,q,Tf
dt
dT
ss
sss (3.26)
A continuación se determinan cada uno de los términos a partir de la ecu (3.26):
00 fP,q,Tf rrr (3.27)
00 gP,q,Tg rrr (3.28)
2
2151302
215130
2152154 4 ae
aTa
T
fae
aTa
T
f ,rT
r
Pi
,iT
i
i ,,s
(3.29)
33 aq
fa
q
f
sPii
(3.30)
21502150
215215
,T
Pi
,T
i
r
s
i eb
T
ge
b
T
g
,,
(3.31)

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
34
11 bq
gb
q
g
sPii
(3.32)
5aP
f
sPi
(3.33)
Reemplazamos las ecs. (3.27), (3.28), (3.29), (3.30), (3.31), (3.32) y (3.33), en la ecu.
(3.26), se tiene:
riri,T
iii
riri
ri,T
riii
qqbTTe,
bgq,Tg
dt
dq
PPaqqa
TTaea
Tafq,Tfdt
dT
r
r
,
12150
0
53
221513
00
215
4215
(3.34)
Con el propósito de facilitar la nomenclatura algebraica utilizada se sustituirán los
coeficientes de la ecu. (3.34) por símbolos fáciles de comprender, el resultado se lo puede
observar en la ecu. (3.35) de la siguiente manera:
ririiiii
riririiiii
qqgTTgP,q,Tgdt
dq
PPaqqfTTfP,q,Tfdt
dT
0201
50201
(3.35)
Donde:
2
21513001 215
4 aea
Taf,rT
r,
302 af
215001
215
,rTe
,
bg
102 bg
Manipulando la ecu. (3.35) y representándola en forma matricial (Pinto Bermúdez &
Matía Espada, 2010) (Ogata, 2010), se tiene:
ri
ri
ri
iii
iii
i
i
PPa
TT
gg
ff
P,q,Tg
P,q,Tf
dt
dqdt
dT
0
5
0201
0201 (3.38)
En este momento se considera los siguientes cambios de variable para una mejor
visualización del modelo:
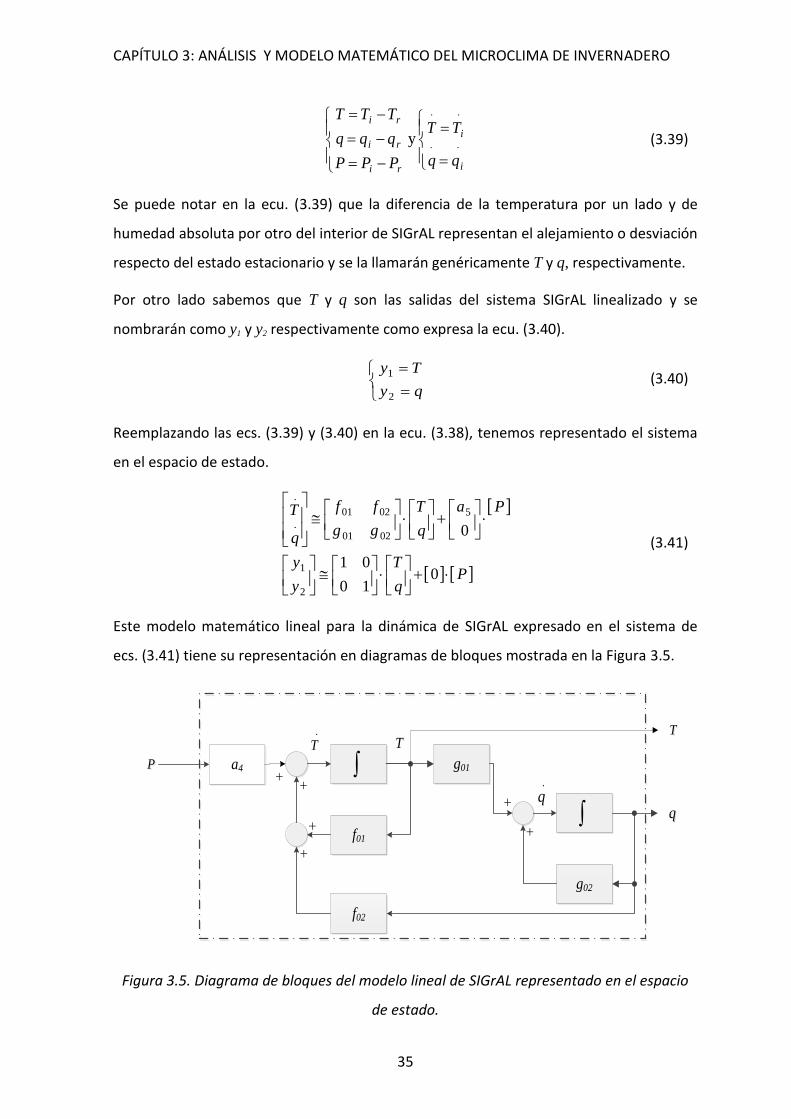
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
35
i
i
ri
ri
ri
TT
PPP
qqq
TTT
y (3.39)
Se puede notar en la ecu. (3.39) que la diferencia de la temperatura por un lado y de
humedad absoluta por otro del interior de SIGrAL representan el alejamiento o desviación
respecto del estado estacionario y se la llamarán genéricamente T y q, respectivamente.
Por otro lado sabemos que T y q son las salidas del sistema SIGrAL linealizado y se
nombrarán como y1 y y2 respectivamente como expresa la ecu. (3.40).
qy
Ty
2
1 (3.40)
Reemplazando las ecs. (3.39) y (3.40) en la ecu. (3.38), tenemos representado el sistema
en el espacio de estado.
Pq
T
y
y
Pa
q
T
gg
ff
q
T.
.
010
01
0
2
1
5
0201
0201
(3.41)
Este modelo matemático lineal para la dinámica de SIGrAL expresado en el sistema de
ecs. (3.41) tiene su representación en diagramas de bloques mostrada en la Figura 3.5.
g01
f01
f02
g02
PP
.
T
.
q
T
TT
a4
Figura 3.5. Diagrama de bloques del modelo lineal de SIGrAL representado en el espacio
de estado.

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
36
A continuación se procede a encontrar la función de transferencia del sistema linealizado
de la dinámica de SIGrAL.
A partir de la ecu. (3.41), que se puede escribir de la siguiente manera.
qgTgq
PaqfTfT.
.
0201
50201 (3.42)
Tomando las transformadas de Laplace de estas dos ecuaciones, suponiendo condiciones
iniciales nulas, y agrupando términos semejantes se obtiene.
sPasQfsTfs 50201 (3.43)
sTgsQgs 0102 (3.44)
Si se resuelve la ecu. (3.44) para Q(s), se sustituye en la ecu. (3.43) y se simplifica, se
obtiene:
sPasTgs
gfsTfs
5
02
010201
sPgsasTgfgfsgfs 0250102020102012
De donde se sigue que:
0102020102012
025
gfgfsgfs
gsa
sP
sT
(3.45)
De las ecs. (3.45) y (3.44) se tiene:
0102020102012
015
gfgfsgfs
ga
sP
sQ
(3.46)
Las ecs. (3.45) y (3.46) son las funciones de transferencia para la temperatura y la
humedad absoluta del sistema SIGrAL.
A partir de la ecu (3.45) y ecu (3.46) se puede observar que la función de transferencia de
la temperatura y la humedad absoluta presentan un mismo denominador, la diferencia
radica en el numerador, que aparte de la ganancia la función de transferencia de la
temperatura presenta un cero respecto de la función de transferencia de la humedad.

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
37
Si se asume que la temperatura de referencia Tr es de 27 °C (300 K), que es la
temperatura óptima para muchos cultivos, calculamos los coeficientes de las ecs. (3.45) y
(3.46).
32
21513001
1079254
215
.aea
Taf,rT
r
,
8302 10559 ,af
3215001 10424
215
.e,
bg
,rT
4102 10173 ,bg
Y a continuación las funciones de trasferencia correspondientes.
632
44
10188101126
1017310830
,s,s
,s,
sP
sT (3.46)
Y para la humedad relativa.
632
7
10188101126
10673
,s,s
.
sP
sQ (3.47)
En este punto utilizamos el programa procesamiento en MATLAB para determinar los
polos y los ceros de las funciones de transferencia representadas en las ecs. (3.46) y
(3.47.), y el resultado se muestra a continuación:
42
44
632
44
1017310582
1017310830
10188101126
1017310830
,s,s
,s,
,s,s
,s,
sP
sT (3.48)
42
7
632
7
1017310582
10673
10188101126
10673
.s,s
.
,s,s
.
sP
sQ (3.49)
En la Figura 3.6 se ilustra la ubicación de los polos y los ceros para la temperatura.
Figura 3.6. Polos y ceros de la función de transferencia teórica de la temperatura.
-0.03 -0.025 -0.02 -0.015 -0.01 -0.005 0-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Pole-Zero Map
Real Axis
Imagin
ary
Axi
s
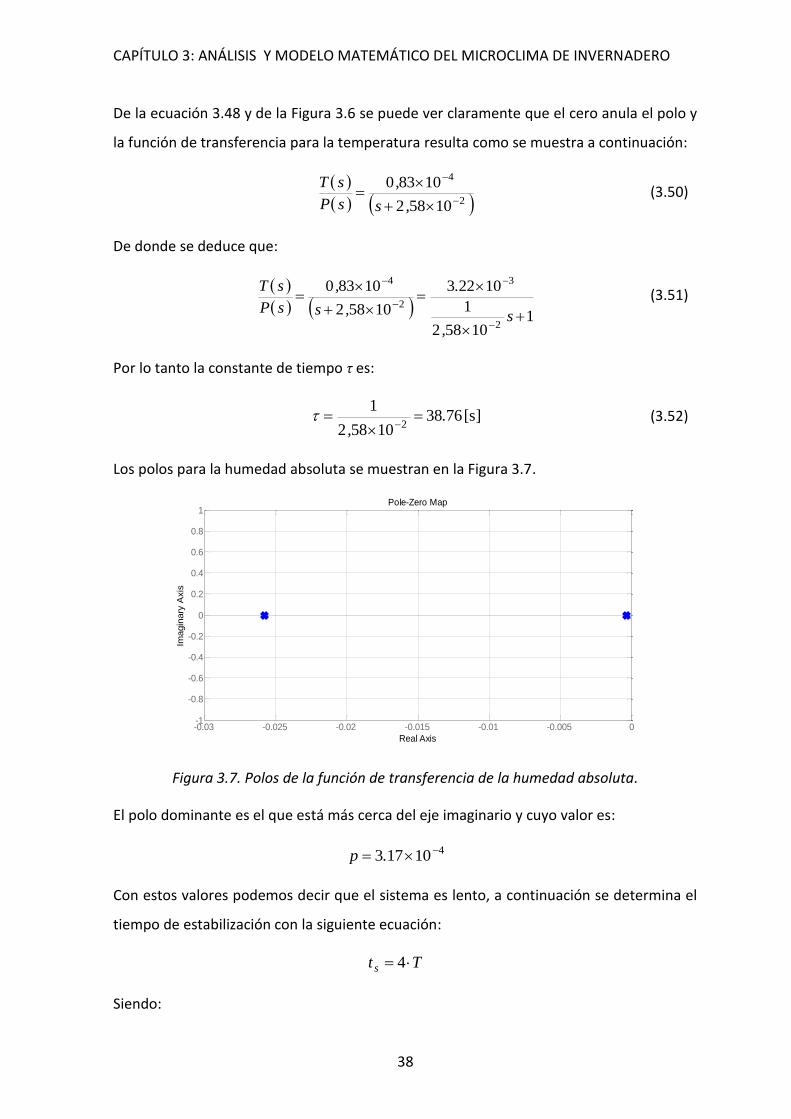
CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
38
De la ecuación 3.48 y de la Figura 3.6 se puede ver claramente que el cero anula el polo y
la función de transferencia para la temperatura resulta como se muestra a continuación:
2
4
10582
10830
,s
,
sP
sT (3.50)
De donde se deduce que:
110582
1
10223
10582
10830
2
3
2
4
s,
.
,s
,
sP
sT (3.51)
Por lo tanto la constante de tiempo τ es:
[s] 763810582
12
.,
(3.52)
Los polos para la humedad absoluta se muestran en la Figura 3.7.
Figura 3.7. Polos de la función de transferencia de la humedad absoluta.
El polo dominante es el que está más cerca del eje imaginario y cuyo valor es:
410173 .p
Con estos valores podemos decir que el sistema es lento, a continuación se determina el
tiempo de estabilización con la siguiente ecuación:
Tt s 4
Siendo:
-0.03 -0.025 -0.02 -0.015 -0.01 -0.005 0-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Pole-Zero Map
Real Axis
Imagin
ary
Axis

CAPÍTULO 3: ANÁLISIS Y MODELO MATEMÁTICO DEL MICROCLIMA DE INVERNADERO
39
n
T
1
De la ecu. (3.49) obtenemos los siguientes valores.
33
3 1005132
1011261011262
,
,, nnn
Entonces:
5676100613
13
.,
T
Por último para un margen del 2%.
s,t s 3066764 (3.53)
Este valor nos dice que en aproximadamente 5 minutos la humedad llega al 98% de su
valor de estado estable.
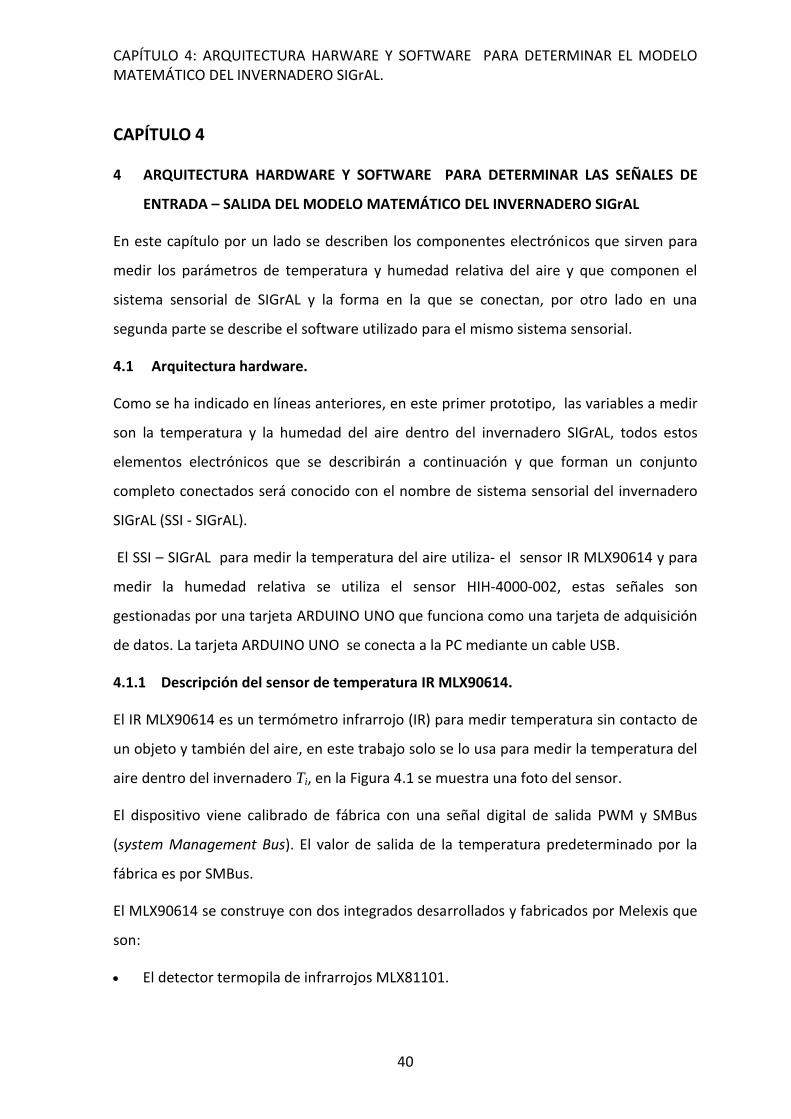
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
40
CAPÍTULO 4
4 ARQUITECTURA HARDWARE Y SOFTWARE PARA DETERMINAR LAS SEÑALES DE
ENTRADA – SALIDA DEL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL
En este capítulo por un lado se describen los componentes electrónicos que sirven para
medir los parámetros de temperatura y humedad relativa del aire y que componen el
sistema sensorial de SIGrAL y la forma en la que se conectan, por otro lado en una
segunda parte se describe el software utilizado para el mismo sistema sensorial.
4.1 Arquitectura hardware.
Como se ha indicado en líneas anteriores, en este primer prototipo, las variables a medir
son la temperatura y la humedad del aire dentro del invernadero SIGrAL, todos estos
elementos electrónicos que se describirán a continuación y que forman un conjunto
completo conectados será conocido con el nombre de sistema sensorial del invernadero
SIGrAL (SSI - SIGrAL).
El SSI – SIGrAL para medir la temperatura del aire utiliza- el sensor IR MLX90614 y para
medir la humedad relativa se utiliza el sensor HIH-4000-002, estas señales son
gestionadas por una tarjeta ARDUINO UNO que funciona como una tarjeta de adquisición
de datos. La tarjeta ARDUINO UNO se conecta a la PC mediante un cable USB.
4.1.1 Descripción del sensor de temperatura IR MLX90614.
El IR MLX90614 es un termómetro infrarrojo (IR) para medir temperatura sin contacto de
un objeto y también del aire, en este trabajo solo se lo usa para medir la temperatura del
aire dentro del invernadero Ti, en la Figura 4.1 se muestra una foto del sensor.
El dispositivo viene calibrado de fábrica con una señal digital de salida PWM y SMBus
(system Management Bus). El valor de salida de la temperatura predeterminado por la
fábrica es por SMBus.
El MLX90614 se construye con dos integrados desarrollados y fabricados por Melexis que
son:
El detector termopila de infrarrojos MLX81101.
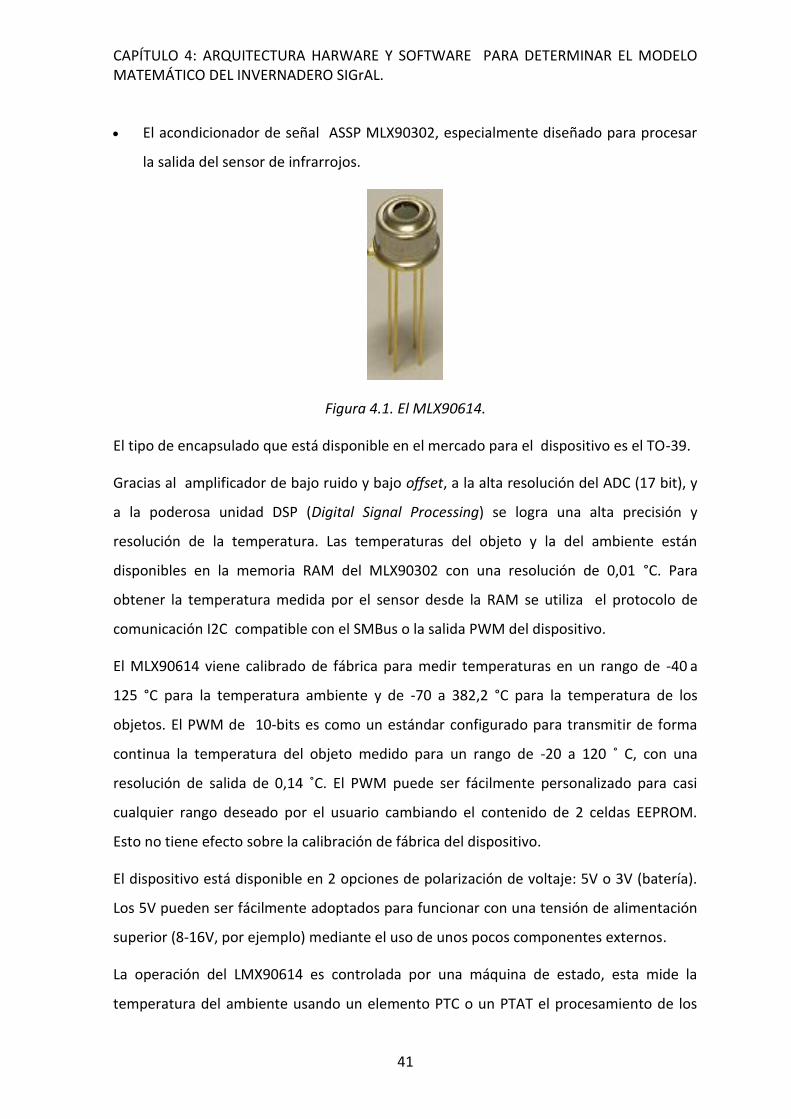
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
41
El acondicionador de señal ASSP MLX90302, especialmente diseñado para procesar
la salida del sensor de infrarrojos.
Figura 4.1. El MLX90614.
El tipo de encapsulado que está disponible en el mercado para el dispositivo es el TO-39.
Gracias al amplificador de bajo ruido y bajo offset, a la alta resolución del ADC (17 bit), y
a la poderosa unidad DSP (Digital Signal Processing) se logra una alta precisión y
resolución de la temperatura. Las temperaturas del objeto y la del ambiente están
disponibles en la memoria RAM del MLX90302 con una resolución de 0,01 °C. Para
obtener la temperatura medida por el sensor desde la RAM se utiliza el protocolo de
comunicación I2C compatible con el SMBus o la salida PWM del dispositivo.
El MLX90614 viene calibrado de fábrica para medir temperaturas en un rango de -40 a
125 °C para la temperatura ambiente y de -70 a 382,2 °C para la temperatura de los
objetos. El PWM de 10-bits es como un estándar configurado para transmitir de forma
continua la temperatura del objeto medido para un rango de -20 a 120 ˚ C, con una
resolución de salida de 0,14 ˚C. El PWM puede ser fácilmente personalizado para casi
cualquier rango deseado por el usuario cambiando el contenido de 2 celdas EEPROM.
Esto no tiene efecto sobre la calibración de fábrica del dispositivo.
El dispositivo está disponible en 2 opciones de polarización de voltaje: 5V o 3V (batería).
Los 5V pueden ser fácilmente adoptados para funcionar con una tensión de alimentación
superior (8-16V, por ejemplo) mediante el uso de unos pocos componentes externos.
La operación del LMX90614 es controlada por una máquina de estado, esta mide la
temperatura del ambiente usando un elemento PTC o un PTAT el procesamiento de los
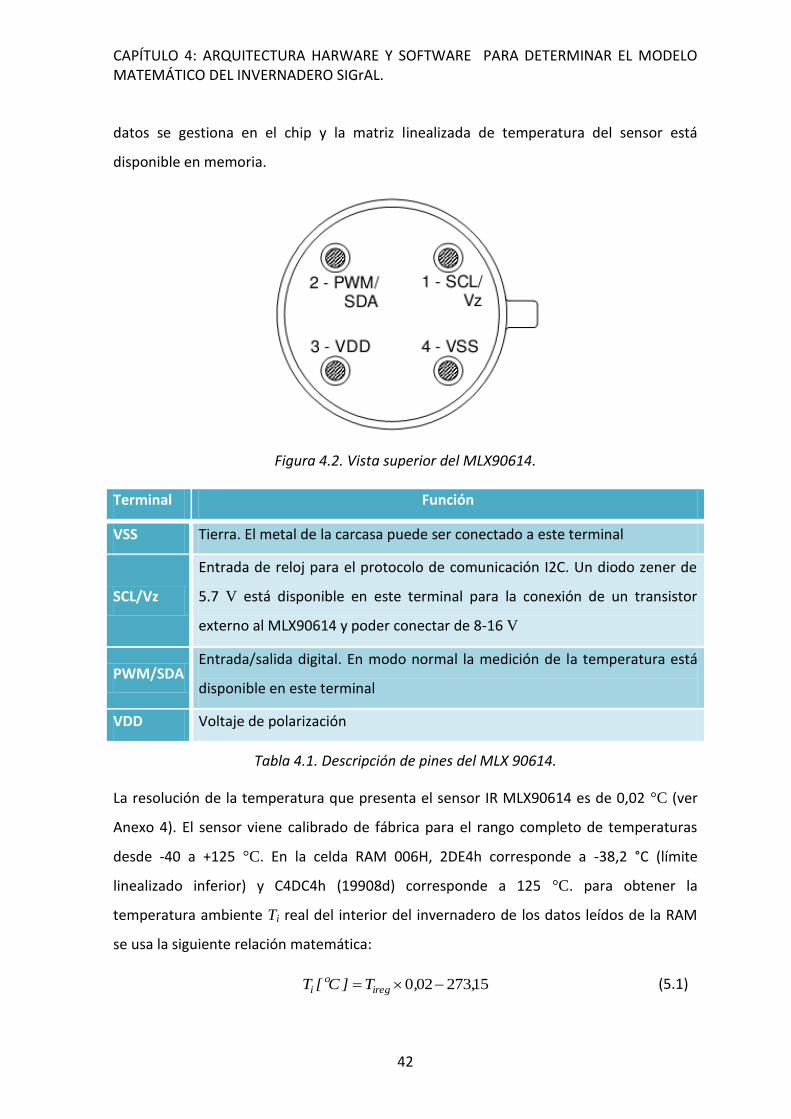
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
42
datos se gestiona en el chip y la matriz linealizada de temperatura del sensor está
disponible en memoria.
Figura 4.2. Vista superior del MLX90614.
Terminal Función
VSS Tierra. El metal de la carcasa puede ser conectado a este terminal
SCL/Vz
Entrada de reloj para el protocolo de comunicación I2C. Un diodo zener de
5.7 V está disponible en este terminal para la conexión de un transistor
externo al MLX90614 y poder conectar de 8-16 V
PWM/SDA Entrada/salida digital. En modo normal la medición de la temperatura está
disponible en este terminal
VDD Voltaje de polarización
Tabla 4.1. Descripción de pines del MLX 90614.
La resolución de la temperatura que presenta el sensor IR MLX90614 es de 0,02 °C (ver
Anexo 4). El sensor viene calibrado de fábrica para el rango completo de temperaturas
desde -40 a +125 °C. En la celda RAM 006H, 2DE4h corresponde a -38,2 °C (límite
linealizado inferior) y C4DC4h (19908d) corresponde a 125 °C. para obtener la
temperatura ambiente Ti real del interior del invernadero de los datos leídos de la RAM
se usa la siguiente relación matemática:
15273020 ,,T]C[T irego
i (5.1)
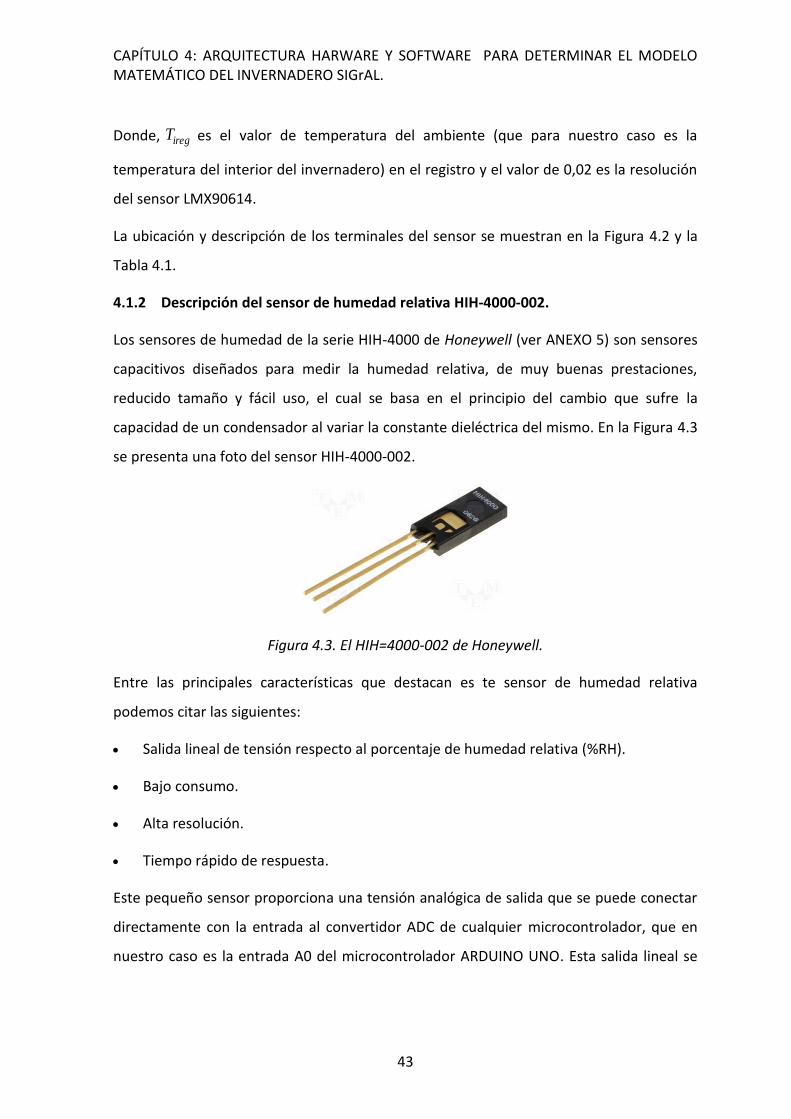
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
43
Donde, iregT es el valor de temperatura del ambiente (que para nuestro caso es la
temperatura del interior del invernadero) en el registro y el valor de 0,02 es la resolución
del sensor LMX90614.
La ubicación y descripción de los terminales del sensor se muestran en la Figura 4.2 y la
Tabla 4.1.
4.1.2 Descripción del sensor de humedad relativa HIH-4000-002.
Los sensores de humedad de la serie HIH-4000 de Honeywell (ver ANEXO 5) son sensores
capacitivos diseñados para medir la humedad relativa, de muy buenas prestaciones,
reducido tamaño y fácil uso, el cual se basa en el principio del cambio que sufre la
capacidad de un condensador al variar la constante dieléctrica del mismo. En la Figura 4.3
se presenta una foto del sensor HIH-4000-002.
Figura 4.3. El HIH=4000-002 de Honeywell.
Entre las principales características que destacan es te sensor de humedad relativa
podemos citar las siguientes:
Salida lineal de tensión respecto al porcentaje de humedad relativa (%RH).
Bajo consumo.
Alta resolución.
Tiempo rápido de respuesta.
Este pequeño sensor proporciona una tensión analógica de salida que se puede conectar
directamente con la entrada al convertidor ADC de cualquier microcontrolador, que en
nuestro caso es la entrada A0 del microcontrolador ARDUINO UNO. Esta salida lineal se
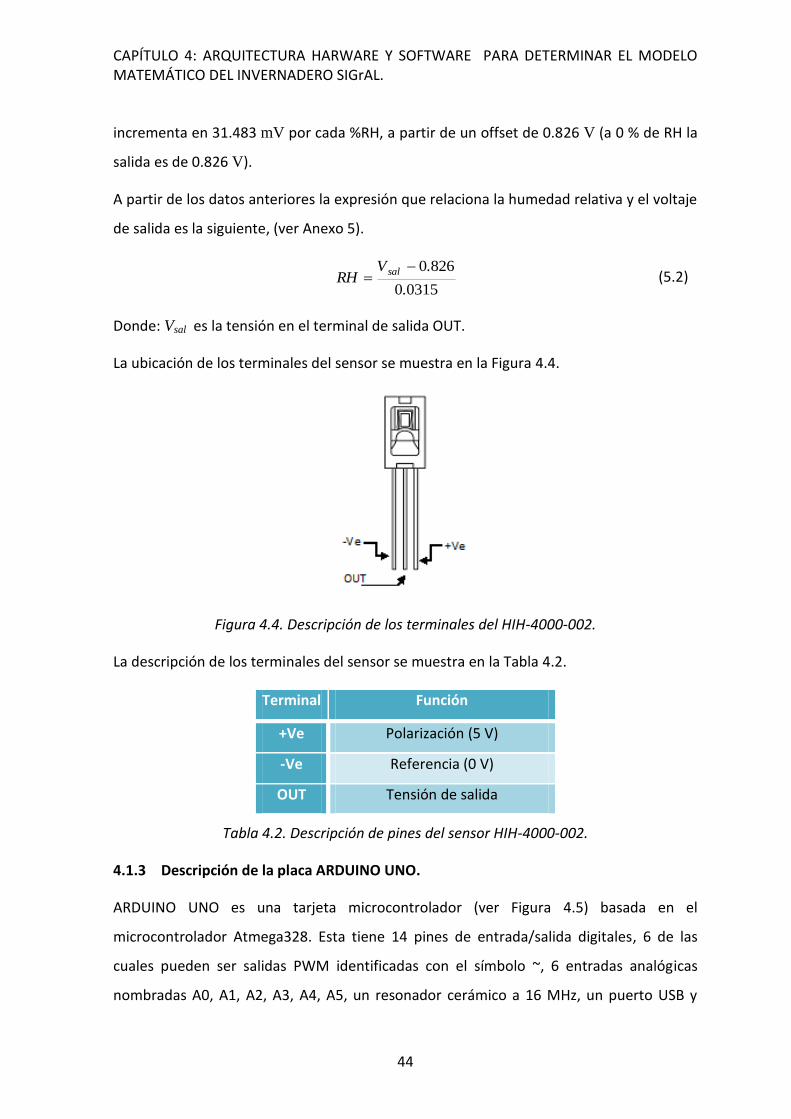
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
44
incrementa en 31.483 mV por cada %RH, a partir de un offset de 0.826 V (a 0 % de RH la
salida es de 0.826 V).
A partir de los datos anteriores la expresión que relaciona la humedad relativa y el voltaje
de salida es la siguiente, (ver Anexo 5).
03150
8260
.
.VRH
sal (5.2)
Donde: Vsal es la tensión en el terminal de salida OUT.
La ubicación de los terminales del sensor se muestra en la Figura 4.4.
Figura 4.4. Descripción de los terminales del HIH-4000-002.
La descripción de los terminales del sensor se muestra en la Tabla 4.2.
Terminal Función
+Ve Polarización (5 V)
-Ve Referencia (0 V)
OUT Tensión de salida
Tabla 4.2. Descripción de pines del sensor HIH-4000-002.
4.1.3 Descripción de la placa ARDUINO UNO.
ARDUINO UNO es una tarjeta microcontrolador (ver Figura 4.5) basada en el
microcontrolador Atmega328. Esta tiene 14 pines de entrada/salida digitales, 6 de las
cuales pueden ser salidas PWM identificadas con el símbolo ~, 6 entradas analógicas
nombradas A0, A1, A2, A3, A4, A5, un resonador cerámico a 16 MHz, un puerto USB y
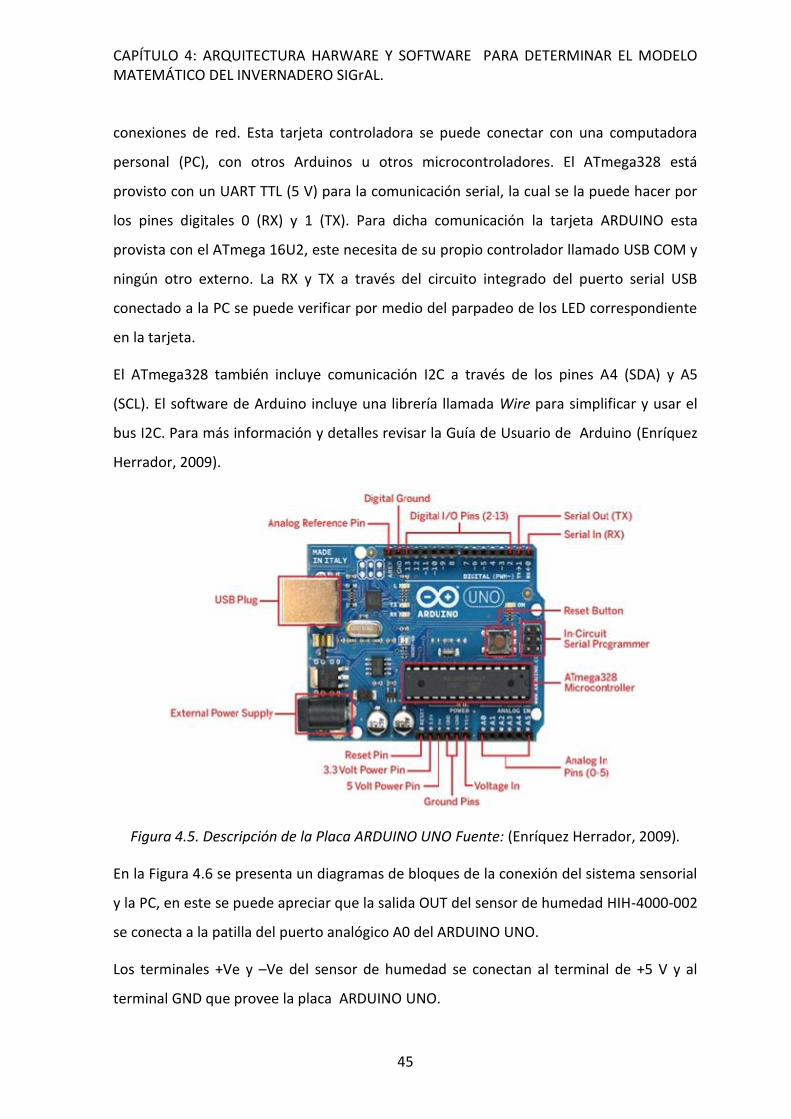
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
45
conexiones de red. Esta tarjeta controladora se puede conectar con una computadora
personal (PC), con otros Arduinos u otros microcontroladores. El ATmega328 está
provisto con un UART TTL (5 V) para la comunicación serial, la cual se la puede hacer por
los pines digitales 0 (RX) y 1 (TX). Para dicha comunicación la tarjeta ARDUINO esta
provista con el ATmega 16U2, este necesita de su propio controlador llamado USB COM y
ningún otro externo. La RX y TX a través del circuito integrado del puerto serial USB
conectado a la PC se puede verificar por medio del parpadeo de los LED correspondiente
en la tarjeta.
El ATmega328 también incluye comunicación I2C a través de los pines A4 (SDA) y A5
(SCL). El software de Arduino incluye una librería llamada Wire para simplificar y usar el
bus I2C. Para más información y detalles revisar la Guía de Usuario de Arduino (Enríquez
Herrador, 2009).
Figura 4.5. Descripción de la Placa ARDUINO UNO Fuente: (Enríquez Herrador, 2009).
En la Figura 4.6 se presenta un diagramas de bloques de la conexión del sistema sensorial
y la PC, en este se puede apreciar que la salida OUT del sensor de humedad HIH-4000-002
se conecta a la patilla del puerto analógico A0 del ARDUINO UNO.
Los terminales +Ve y –Ve del sensor de humedad se conectan al terminal de +5 V y al
terminal GND que provee la placa ARDUINO UNO.
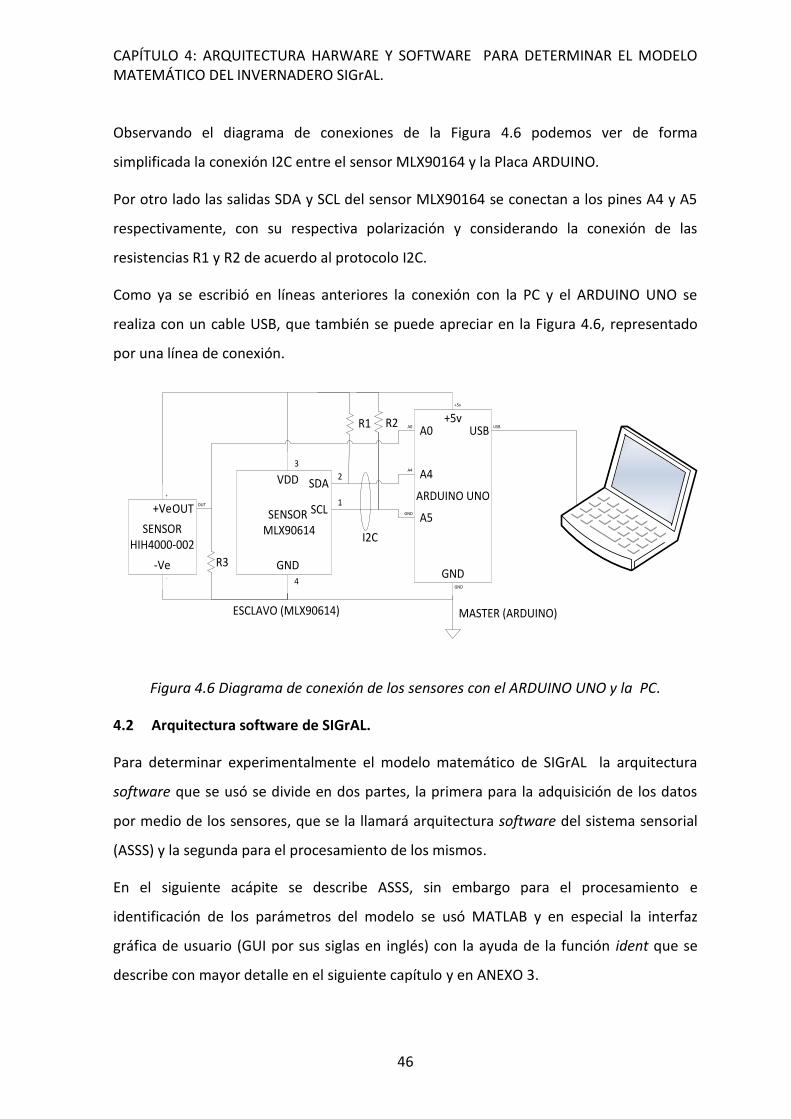
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
46
Observando el diagrama de conexiones de la Figura 4.6 podemos ver de forma
simplificada la conexión I2C entre el sensor MLX90164 y la Placa ARDUINO.
Por otro lado las salidas SDA y SCL del sensor MLX90164 se conectan a los pines A4 y A5
respectivamente, con su respectiva polarización y considerando la conexión de las
resistencias R1 y R2 de acuerdo al protocolo I2C.
Como ya se escribió en líneas anteriores la conexión con la PC y el ARDUINO UNO se
realiza con un cable USB, que también se puede apreciar en la Figura 4.6, representado
por una línea de conexión.
A0A0
A4A4
GND
A5
USB USB+5v
+5v
GNDGND
ARDUINO UNOSDA
SCL
2
1
VDD
3
GND4
SENSOR MLX90614
OUT OUT+Ve+
-Ve-
SENSORHIH4000-002
MASTER (ARDUINO)ESCLAVO (MLX90614)
R1 R2
R3
I2C
Figura 4.6 Diagrama de conexión de los sensores con el ARDUINO UNO y la PC.
4.2 Arquitectura software de SIGrAL.
Para determinar experimentalmente el modelo matemático de SIGrAL la arquitectura
software que se usó se divide en dos partes, la primera para la adquisición de los datos
por medio de los sensores, que se la llamará arquitectura software del sistema sensorial
(ASSS) y la segunda para el procesamiento de los mismos.
En el siguiente acápite se describe ASSS, sin embargo para el procesamiento e
identificación de los parámetros del modelo se usó MATLAB y en especial la interfaz
gráfica de usuario (GUI por sus siglas en inglés) con la ayuda de la función ident que se
describe con mayor detalle en el siguiente capítulo y en ANEXO 3.
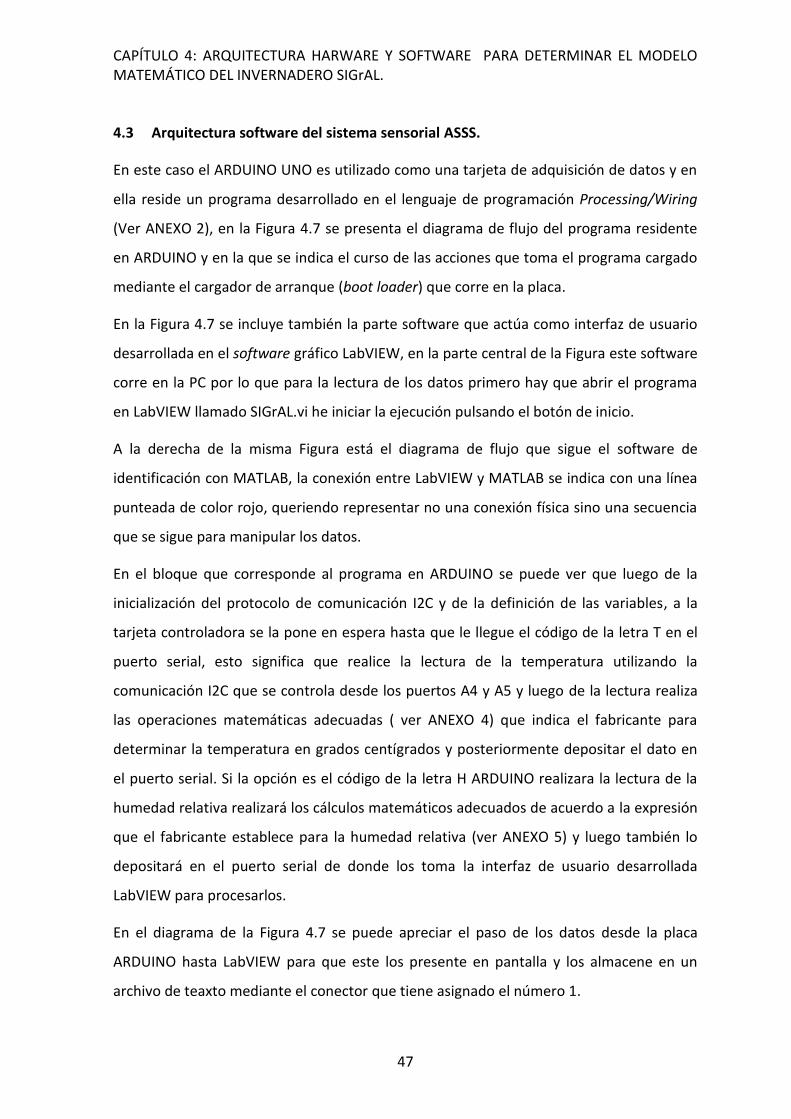
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
47
4.3 Arquitectura software del sistema sensorial ASSS.
En este caso el ARDUINO UNO es utilizado como una tarjeta de adquisición de datos y en
ella reside un programa desarrollado en el lenguaje de programación Processing/Wiring
(Ver ANEXO 2), en la Figura 4.7 se presenta el diagrama de flujo del programa residente
en ARDUINO y en la que se indica el curso de las acciones que toma el programa cargado
mediante el cargador de arranque (boot loader) que corre en la placa.
En la Figura 4.7 se incluye también la parte software que actúa como interfaz de usuario
desarrollada en el software gráfico LabVIEW, en la parte central de la Figura este software
corre en la PC por lo que para la lectura de los datos primero hay que abrir el programa
en LabVIEW llamado SIGrAL.vi he iniciar la ejecución pulsando el botón de inicio.
A la derecha de la misma Figura está el diagrama de flujo que sigue el software de
identificación con MATLAB, la conexión entre LabVIEW y MATLAB se indica con una línea
punteada de color rojo, queriendo representar no una conexión física sino una secuencia
que se sigue para manipular los datos.
En el bloque que corresponde al programa en ARDUINO se puede ver que luego de la
inicialización del protocolo de comunicación I2C y de la definición de las variables, a la
tarjeta controladora se la pone en espera hasta que le llegue el código de la letra T en el
puerto serial, esto significa que realice la lectura de la temperatura utilizando la
comunicación I2C que se controla desde los puertos A4 y A5 y luego de la lectura realiza
las operaciones matemáticas adecuadas ( ver ANEXO 4) que indica el fabricante para
determinar la temperatura en grados centígrados y posteriormente depositar el dato en
el puerto serial. Si la opción es el código de la letra H ARDUINO realizara la lectura de la
humedad relativa realizará los cálculos matemáticos adecuados de acuerdo a la expresión
que el fabricante establece para la humedad relativa (ver ANEXO 5) y luego también lo
depositará en el puerto serial de donde los toma la interfaz de usuario desarrollada
LabVIEW para procesarlos.
En el diagrama de la Figura 4.7 se puede apreciar el paso de los datos desde la placa
ARDUINO hasta LabVIEW para que este los presente en pantalla y los almacene en un
archivo de teaxto mediante el conector que tiene asignado el número 1.
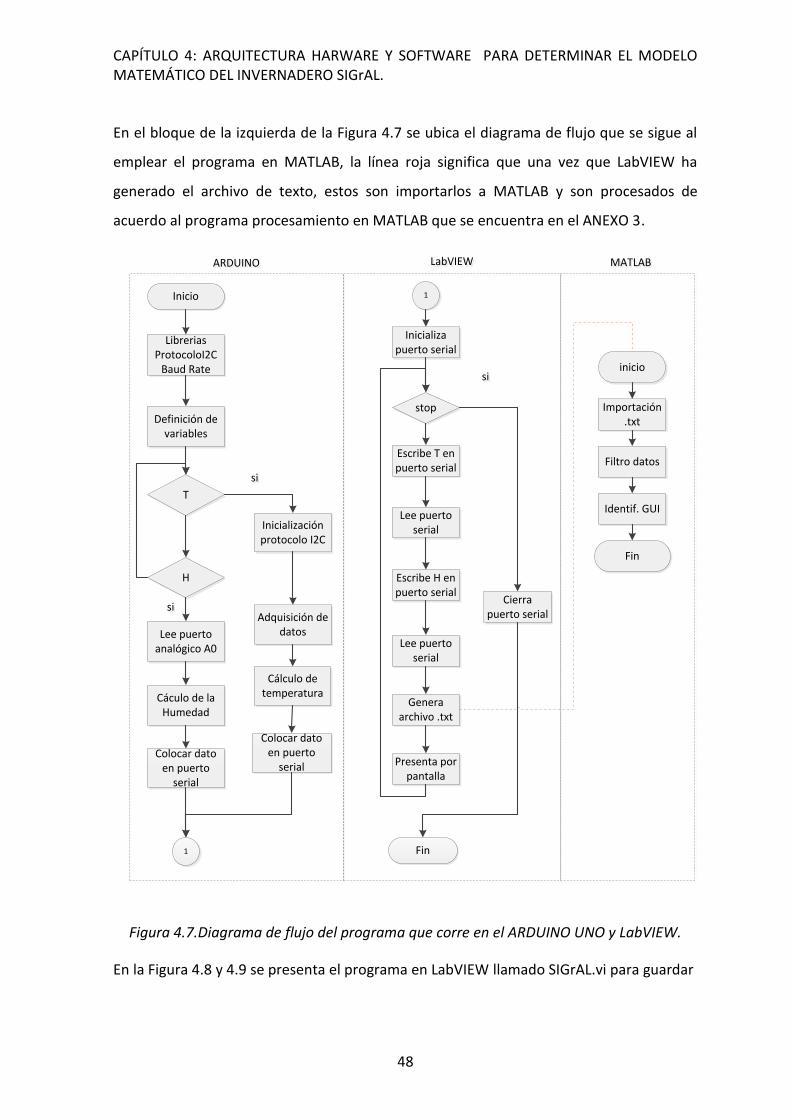
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
48
En el bloque de la izquierda de la Figura 4.7 se ubica el diagrama de flujo que se sigue al
emplear el programa en MATLAB, la línea roja significa que una vez que LabVIEW ha
generado el archivo de texto, estos son importarlos a MATLAB y son procesados de
acuerdo al programa procesamiento en MATLAB que se encuentra en el ANEXO 3.
Inicio
Fin
LibreriasProtocoloI2C
Baud Rate
Definición de variables
Cáculo de la Humedad
Lee puerto analógico A0
Cálculo de temperatura
Inicialización protocolo I2C
Colocar dato en puerto
serial
Colocar dato en puerto
serial
Adquisición de datos
T
H
Inicializa puerto serial
1
1
Escribe T en puerto serial
stop
Lee puerto serial
Escribe H en puerto serial
sisi
sisi
sisi
Lee puerto serial
Genera archivo .txt
Presenta por pantalla
Cierra puerto serial
ARDUINOARDUINO LabVIEWLabVIEW
Importación .txt
inicio
Filtro datos
Identif. GUI
Fin
MATLABMATLAB
Figura 4.7.Diagrama de flujo del programa que corre en el ARDUINO UNO y LabVIEW.
En la Figura 4.8 y 4.9 se presenta el programa en LabVIEW llamado SIGrAL.vi para guardar
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
49
los datos medidos de humedad relativa y temperatura en un archivo de texto para su
posterior manipulación con MATLAB.
En la Figura 4.8 se presenta el panel frontal en la que se grafica la variación tanto de la
humedad como de la temperatura y se presenta una tabla que registra los datos medidos
en tiempo real. La figura capta un momento en el que LabVIEW está registrando los
valores de temperatura y humedad.
Figura 4.8. Panel Frontal del programa SIGrAL.vi.
En la Figura 4.9 se presenta el diagrama de bloques, del programa SIGrAL.vi, en la que se
aprecia a la izquierda la inicialización del puerto serial y la entrada a un lazo While Loop,
todo el programa se realiza en secuencia por eso se usa una Flat Sequence structure,
comenzando con la escritura de ‘T’ por medio de VISA write y luego leer el dato medido
de temperatura por el sensor y presentarlo en pantalla y además guardarlo en un archivo
de texto que para el efecto se lo llama dato con extensión .txt.
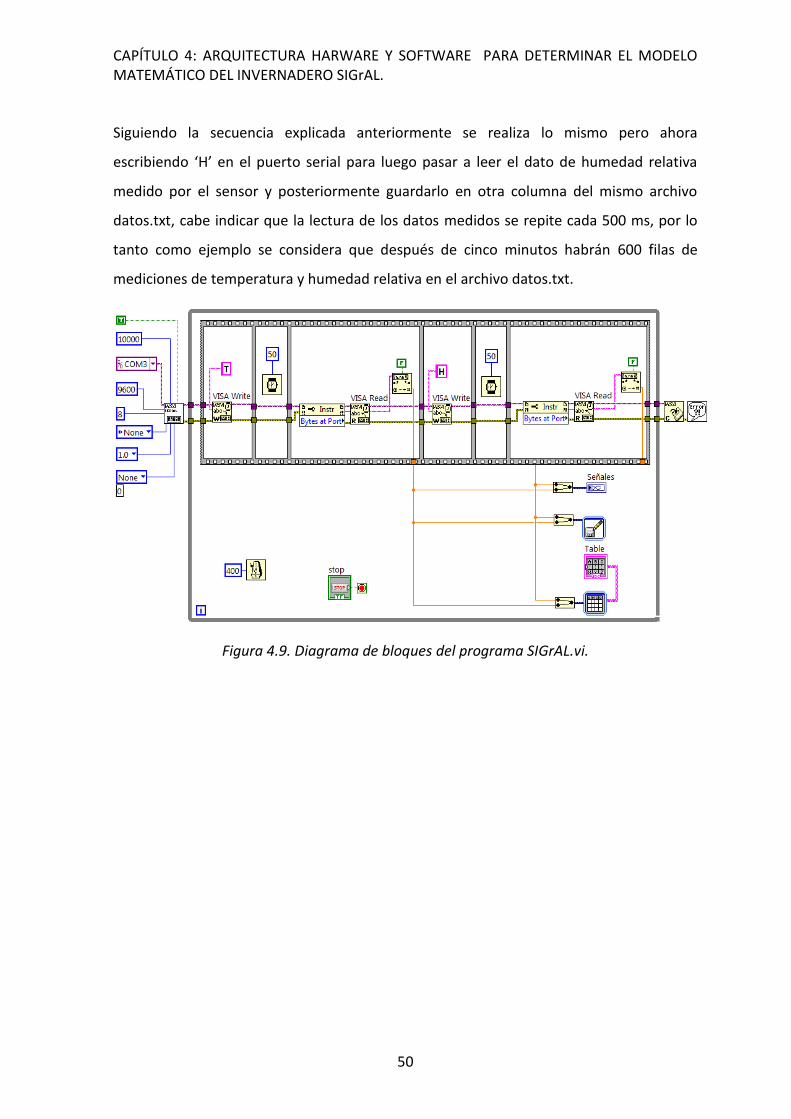
CAPÍTULO 4: ARQUITECTURA HARWARE Y SOFTWARE PARA DETERMINAR EL MODELO MATEMÁTICO DEL INVERNADERO SIGrAL.
50
Siguiendo la secuencia explicada anteriormente se realiza lo mismo pero ahora
escribiendo ‘H’ en el puerto serial para luego pasar a leer el dato de humedad relativa
medido por el sensor y posteriormente guardarlo en otra columna del mismo archivo
datos.txt, cabe indicar que la lectura de los datos medidos se repite cada 500 ms, por lo
tanto como ejemplo se considera que después de cinco minutos habrán 600 filas de
mediciones de temperatura y humedad relativa en el archivo datos.txt.
Figura 4.9. Diagrama de bloques del programa SIGrAL.vi.
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
51
CAPÍTULO 5
5 IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL
Las partes que componen este capítulo son las siguientes:
Primero se diseña y se describen los pasos que se llevaron a cabo para realizar los
experimentos que en este caso fueron de 6, y luego se recogen los datos
mostrándolos en las diferentes gráficas.
Segundo se describe y se usa el toolbox de identificación de MATLAB para
determinar las funciones de trasferencia de las señales de entrada – salida para cada
experimento.
5.1 Diseño, ejecución y recogida de datos de los experimentos.
Antes de realizar el proceso de identificación del sistema, se deben tener los datos
experimentales de entrada – salida que son los que servirán de base para la obtención del
modelo final a partir de la identificación de los parámetros del sistema SIGrAL.
El sistema SIGrAL que se está identificando se lo puede esquematizar como una caja
negra como se indica en la Figura 6.1 de la siguiente manera, por un lado la entrada de
potencia por unidad de área (W/m2) Pi y por otro lado las salidas tanto de humedad
relativa qi como de temperatura Ti, estas salidas son las entradas del sistema
identificador de parámetros que consta de dos partes, una de hardware y la otra
software. En la misma figura se puede observar dos entradas adicionales al sistema
indicadas como Tr y qr, que no son otra cosa que las entradas de referencia tanto de
temperatura como de humedad respectivamente, pero que no son entradas del
identificador de parámetros.
La parte de hardware fue descrita en el capítulo anterior y es conocida con el
nombre de SSI –SIGrAL. Para la parte de software se utilizará el toolbox de identificación
de MATLAB (ver ANEXO 3).
En esta situación se ha realizado un conjunto de 6 experimentos que consisten en variar
la potencia por unidad de área de entrada Pi (W/m2), y se miden las salidas qi y Ti con el
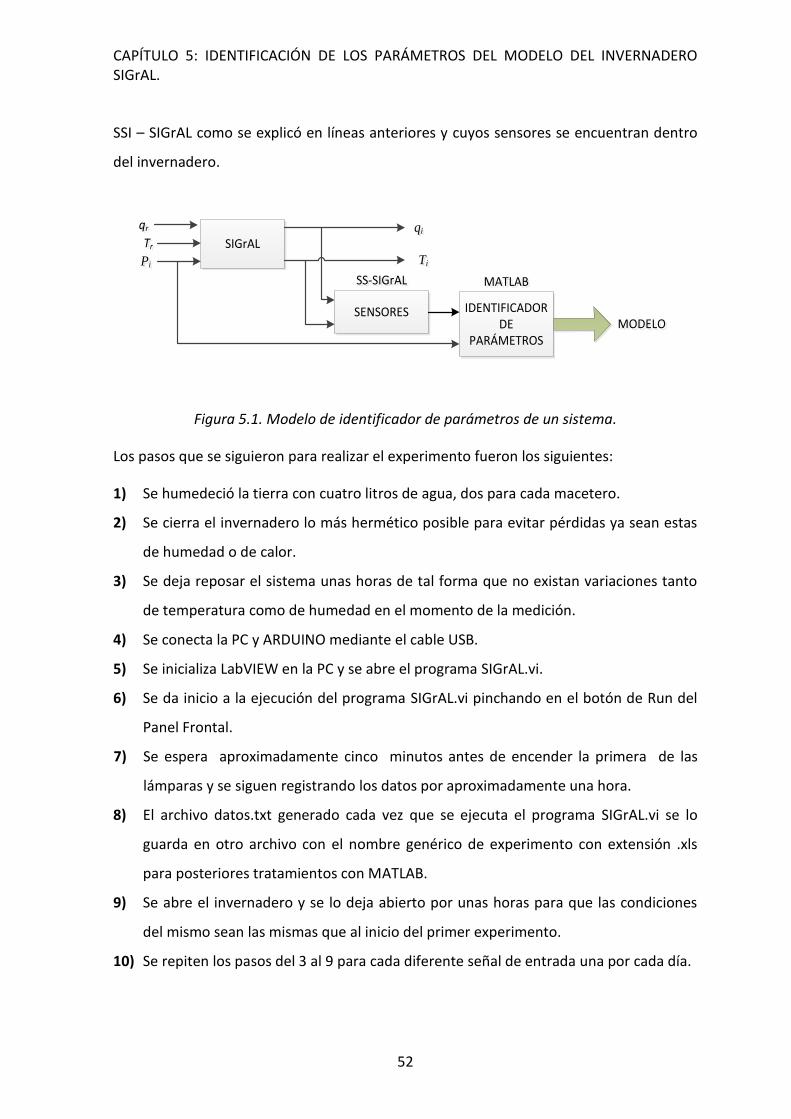
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
52
SSI – SIGrAL como se explicó en líneas anteriores y cuyos sensores se encuentran dentro
del invernadero.
SIGrALqiqi
TiTiPiPi
IDENTIFICADOR DE
PARÁMETROSMODELOMODELO
TrTr
qrqr
SENSORES
SS-SIGrALSS-SIGrAL MATLABMATLAB
Figura 5.1. Modelo de identificador de parámetros de un sistema.
Los pasos que se siguieron para realizar el experimento fueron los siguientes:
1) Se humedeció la tierra con cuatro litros de agua, dos para cada macetero.
2) Se cierra el invernadero lo más hermético posible para evitar pérdidas ya sean estas
de humedad o de calor.
3) Se deja reposar el sistema unas horas de tal forma que no existan variaciones tanto
de temperatura como de humedad en el momento de la medición.
4) Se conecta la PC y ARDUINO mediante el cable USB.
5) Se inicializa LabVIEW en la PC y se abre el programa SIGrAL.vi.
6) Se da inicio a la ejecución del programa SIGrAL.vi pinchando en el botón de Run del
Panel Frontal.
7) Se espera aproximadamente cinco minutos antes de encender la primera de las
lámparas y se siguen registrando los datos por aproximadamente una hora.
8) El archivo datos.txt generado cada vez que se ejecuta el programa SIGrAL.vi se lo
guarda en otro archivo con el nombre genérico de experimento con extensión .xls
para posteriores tratamientos con MATLAB.
9) Se abre el invernadero y se lo deja abierto por unas horas para que las condiciones
del mismo sean las mismas que al inicio del primer experimento.
10) Se repiten los pasos del 3 al 9 para cada diferente señal de entrada una por cada día.
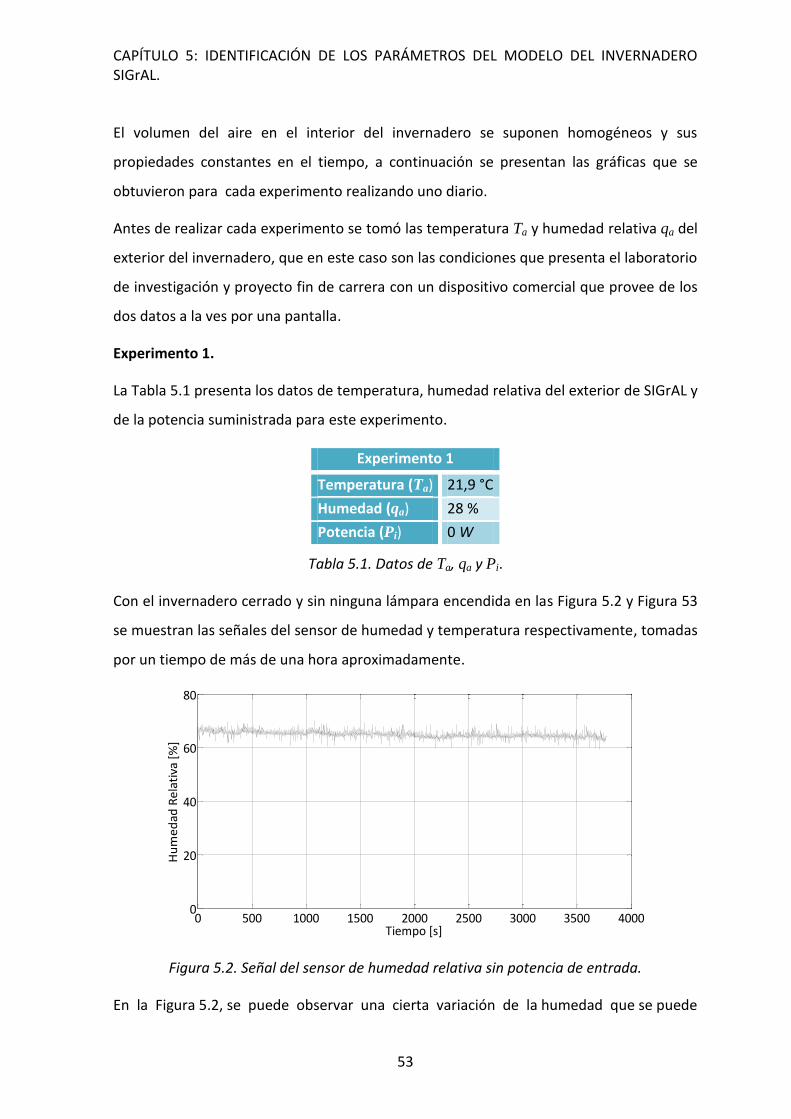
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
53
El volumen del aire en el interior del invernadero se suponen homogéneos y sus
propiedades constantes en el tiempo, a continuación se presentan las gráficas que se
obtuvieron para cada experimento realizando uno diario.
Antes de realizar cada experimento se tomó las temperatura Ta y humedad relativa qa del
exterior del invernadero, que en este caso son las condiciones que presenta el laboratorio
de investigación y proyecto fin de carrera con un dispositivo comercial que provee de los
dos datos a la ves por una pantalla.
Experimento 1.
La Tabla 5.1 presenta los datos de temperatura, humedad relativa del exterior de SIGrAL y
de la potencia suministrada para este experimento.
Experimento 1
Temperatura (Ta) 21,9 °C
Humedad (qa) 28 %
Potencia (Pi) 0 W
Tabla 5.1. Datos de Ta, qa y Pi.
Con el invernadero cerrado y sin ninguna lámpara encendida en las Figura 5.2 y Figura 53
se muestran las señales del sensor de humedad y temperatura respectivamente, tomadas
por un tiempo de más de una hora aproximadamente.
Figura 5.2. Señal del sensor de humedad relativa sin potencia de entrada.
En la Figura 5.2, se puede observar una cierta variación de la humedad que se puede
0 500 1000 1500 2000 2500 3000 3500 40000
20
40
60
80
Tiempo [s]
Hu
me
dad
Re
lati
va [
%]
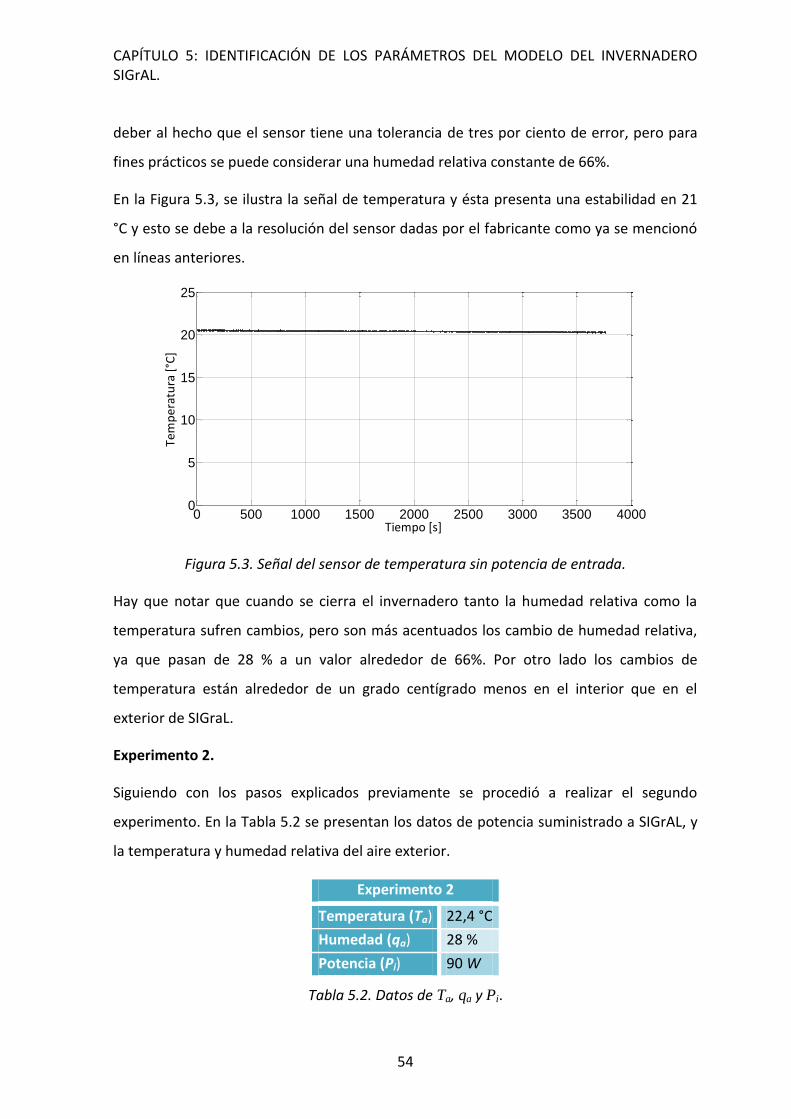
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
54
deber al hecho que el sensor tiene una tolerancia de tres por ciento de error, pero para
fines prácticos se puede considerar una humedad relativa constante de 66%.
En la Figura 5.3, se ilustra la señal de temperatura y ésta presenta una estabilidad en 21
°C y esto se debe a la resolución del sensor dadas por el fabricante como ya se mencionó
en líneas anteriores.
Figura 5.3. Señal del sensor de temperatura sin potencia de entrada.
Hay que notar que cuando se cierra el invernadero tanto la humedad relativa como la
temperatura sufren cambios, pero son más acentuados los cambio de humedad relativa,
ya que pasan de 28 % a un valor alrededor de 66%. Por otro lado los cambios de
temperatura están alrededor de un grado centígrado menos en el interior que en el
exterior de SIGraL.
Experimento 2.
Siguiendo con los pasos explicados previamente se procedió a realizar el segundo
experimento. En la Tabla 5.2 se presentan los datos de potencia suministrado a SIGrAL, y
la temperatura y humedad relativa del aire exterior.
Experimento 2
Temperatura (Ta) 22,4 °C
Humedad (qa) 28 %
Potencia (Pi) 90 W
Tabla 5.2. Datos de Ta, qa y Pi.
0 500 1000 1500 2000 2500 3000 3500 40000
5
10
15
20
25
Tiempo [s]
Te
mp
era
tura
[°C
]
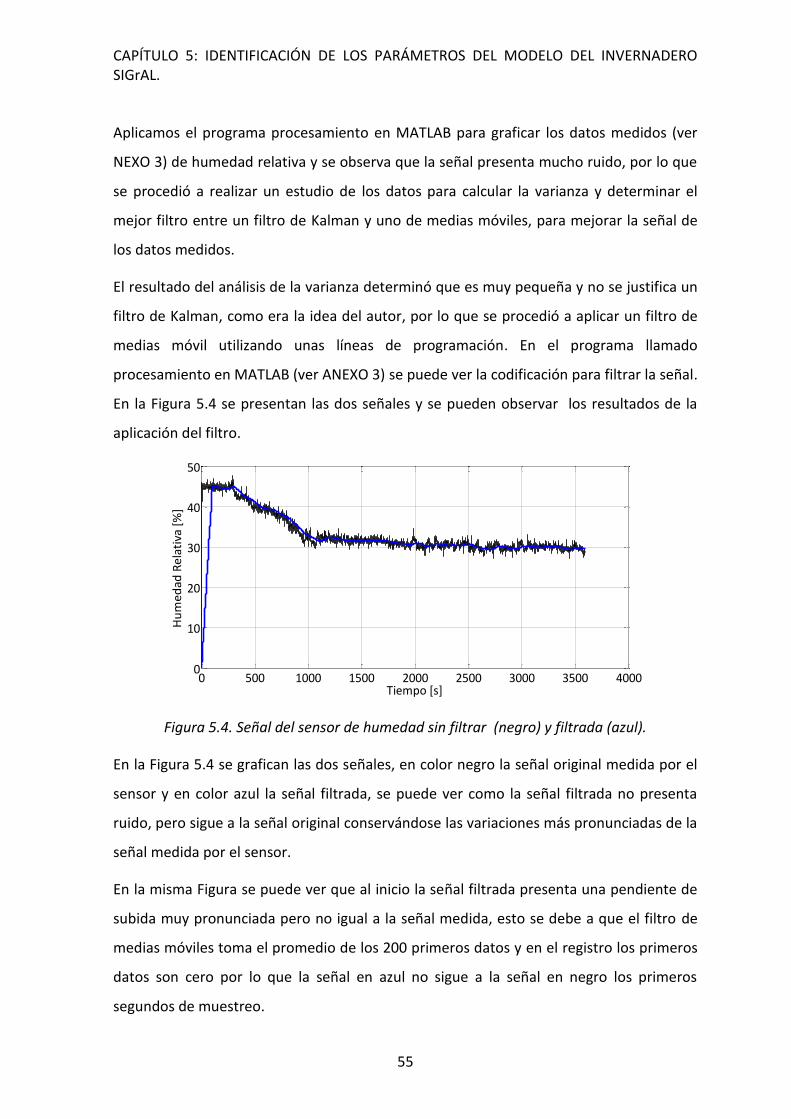
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
55
Aplicamos el programa procesamiento en MATLAB para graficar los datos medidos (ver
NEXO 3) de humedad relativa y se observa que la señal presenta mucho ruido, por lo que
se procedió a realizar un estudio de los datos para calcular la varianza y determinar el
mejor filtro entre un filtro de Kalman y uno de medias móviles, para mejorar la señal de
los datos medidos.
El resultado del análisis de la varianza determinó que es muy pequeña y no se justifica un
filtro de Kalman, como era la idea del autor, por lo que se procedió a aplicar un filtro de
medias móvil utilizando unas líneas de programación. En el programa llamado
procesamiento en MATLAB (ver ANEXO 3) se puede ver la codificación para filtrar la señal.
En la Figura 5.4 se presentan las dos señales y se pueden observar los resultados de la
aplicación del filtro.
Figura 5.4. Señal del sensor de humedad sin filtrar (negro) y filtrada (azul).
En la Figura 5.4 se grafican las dos señales, en color negro la señal original medida por el
sensor y en color azul la señal filtrada, se puede ver como la señal filtrada no presenta
ruido, pero sigue a la señal original conservándose las variaciones más pronunciadas de la
señal medida por el sensor.
En la misma Figura se puede ver que al inicio la señal filtrada presenta una pendiente de
subida muy pronunciada pero no igual a la señal medida, esto se debe a que el filtro de
medias móviles toma el promedio de los 200 primeros datos y en el registro los primeros
datos son cero por lo que la señal en azul no sigue a la señal en negro los primeros
segundos de muestreo.
0 500 1000 1500 2000 2500 3000 3500 40000
10
20
30
40
50
Tiempo [s]
Hu
me
dad
Re
lati
va [
%]
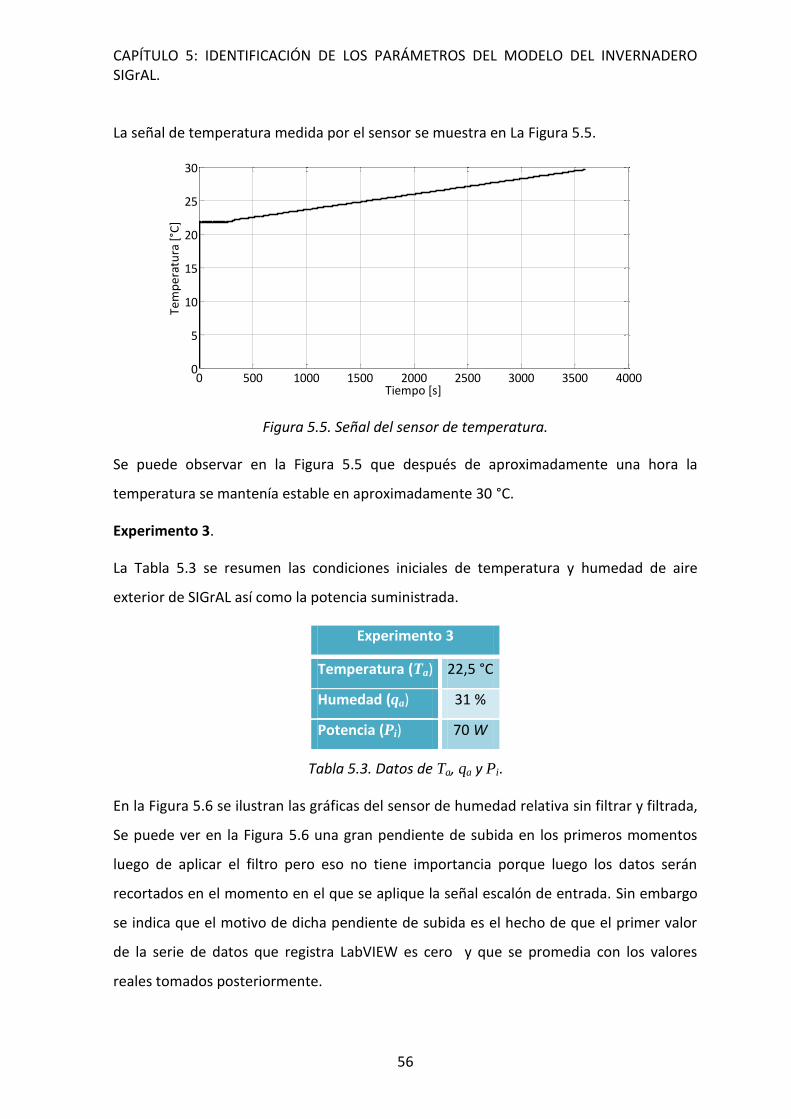
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
56
La señal de temperatura medida por el sensor se muestra en La Figura 5.5.
Figura 5.5. Señal del sensor de temperatura.
Se puede observar en la Figura 5.5 que después de aproximadamente una hora la
temperatura se mantenía estable en aproximadamente 30 °C.
Experimento 3.
La Tabla 5.3 se resumen las condiciones iniciales de temperatura y humedad de aire
exterior de SIGrAL así como la potencia suministrada.
Experimento 3
Temperatura (Ta) 22,5 °C
Humedad (qa) 31 %
Potencia (Pi) 70 W
Tabla 5.3. Datos de Ta, qa y Pi.
En la Figura 5.6 se ilustran las gráficas del sensor de humedad relativa sin filtrar y filtrada,
Se puede ver en la Figura 5.6 una gran pendiente de subida en los primeros momentos
luego de aplicar el filtro pero eso no tiene importancia porque luego los datos serán
recortados en el momento en el que se aplique la señal escalón de entrada. Sin embargo
se indica que el motivo de dicha pendiente de subida es el hecho de que el primer valor
de la serie de datos que registra LabVIEW es cero y que se promedia con los valores
reales tomados posteriormente.
0 500 1000 1500 2000 2500 3000 3500 40000
5
10
15
20
25
30
Tiempo [s]
Te
mp
era
tura
[°C
]
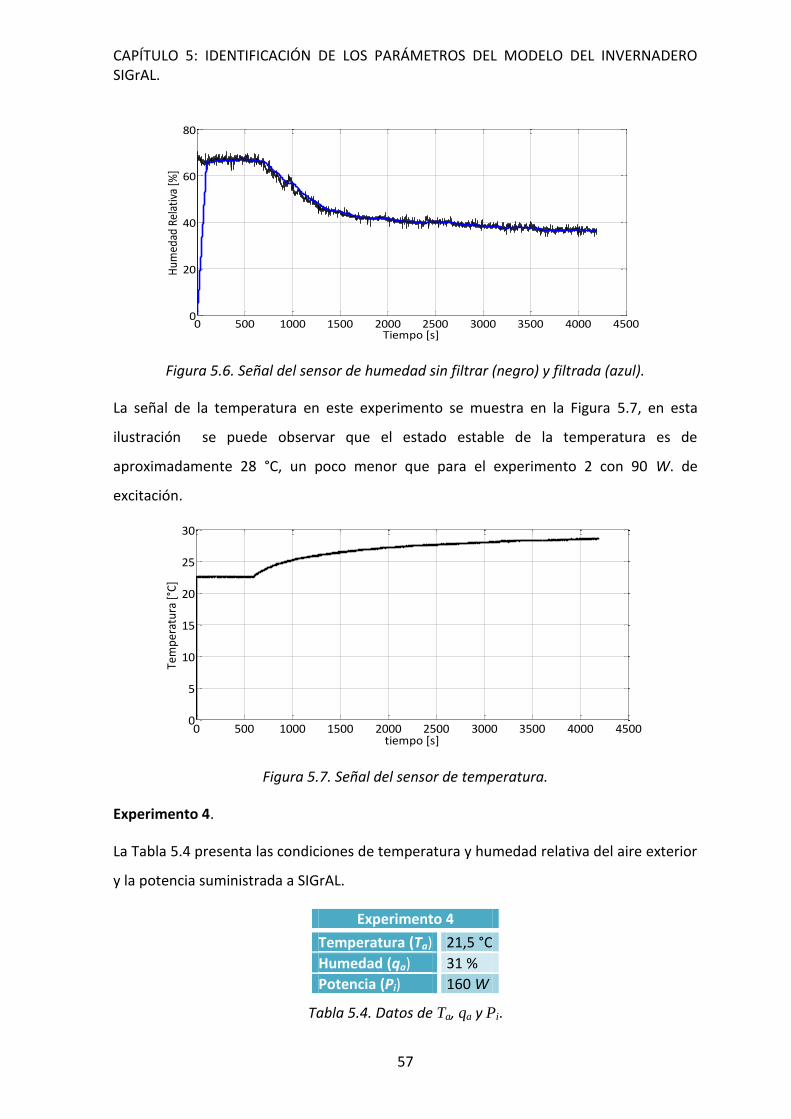
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
57
Figura 5.6. Señal del sensor de humedad sin filtrar (negro) y filtrada (azul).
La señal de la temperatura en este experimento se muestra en la Figura 5.7, en esta
ilustración se puede observar que el estado estable de la temperatura es de
aproximadamente 28 °C, un poco menor que para el experimento 2 con 90 W. de
excitación.
Figura 5.7. Señal del sensor de temperatura.
Experimento 4.
La Tabla 5.4 presenta las condiciones de temperatura y humedad relativa del aire exterior
y la potencia suministrada a SIGrAL.
Experimento 4
Temperatura (Ta) 21,5 °C
Humedad (qa) 31 %
Potencia (Pi) 160 W
Tabla 5.4. Datos de Ta, qa y Pi.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
20
40
60
80
Tiempo [s]
Hum
edad
Rel
ativ
a [%
]
0 500 1000 1500 2000 2500 3000 3500 4000 45000
5
10
15
20
25
30
tiempo [s]
Tem
per
atu
ra [
°C]
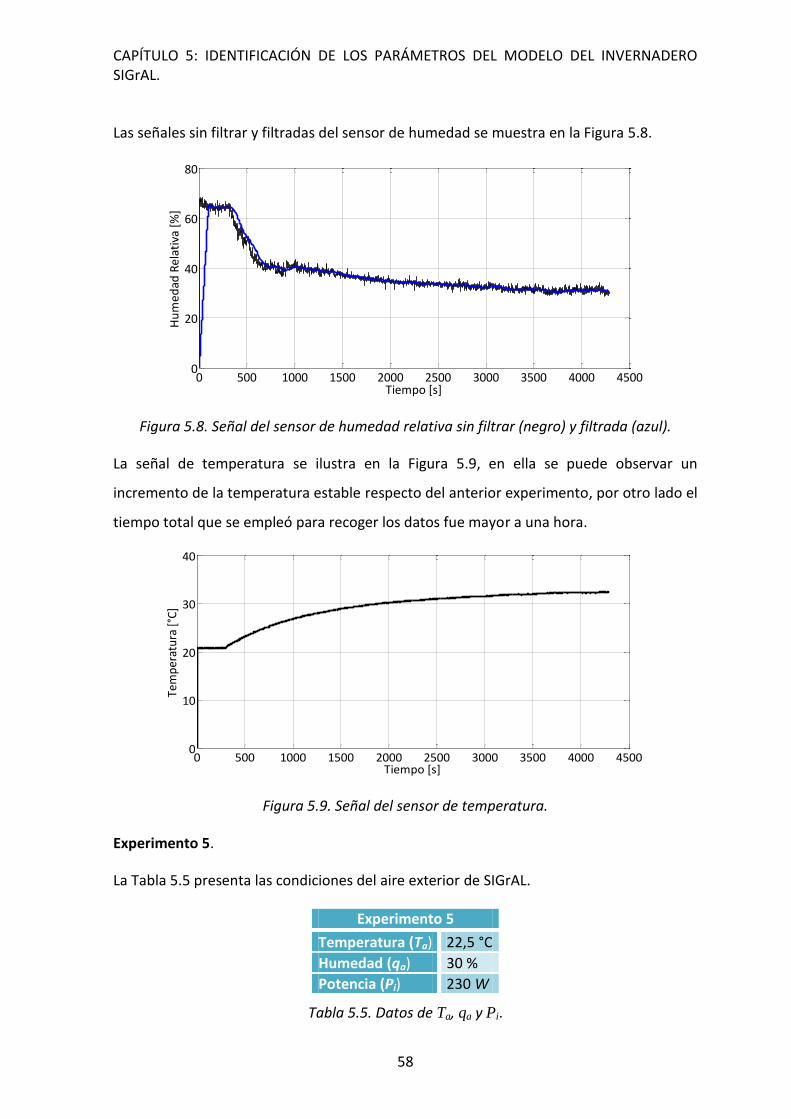
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
58
Las señales sin filtrar y filtradas del sensor de humedad se muestra en la Figura 5.8.
Figura 5.8. Señal del sensor de humedad relativa sin filtrar (negro) y filtrada (azul).
La señal de temperatura se ilustra en la Figura 5.9, en ella se puede observar un
incremento de la temperatura estable respecto del anterior experimento, por otro lado el
tiempo total que se empleó para recoger los datos fue mayor a una hora.
Figura 5.9. Señal del sensor de temperatura.
Experimento 5.
La Tabla 5.5 presenta las condiciones del aire exterior de SIGrAL.
Experimento 5
Temperatura (Ta) 22,5 °C
Humedad (qa) 30 %
Potencia (Pi) 230 W
Tabla 5.5. Datos de Ta, qa y Pi.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
20
40
60
80
Tiempo [s]
Hu
me
dad
Re
lati
va [
%]
0 500 1000 1500 2000 2500 3000 3500 4000 45000
10
20
30
40
Tiempo [s]
Tem
per
atu
ra [
°C]
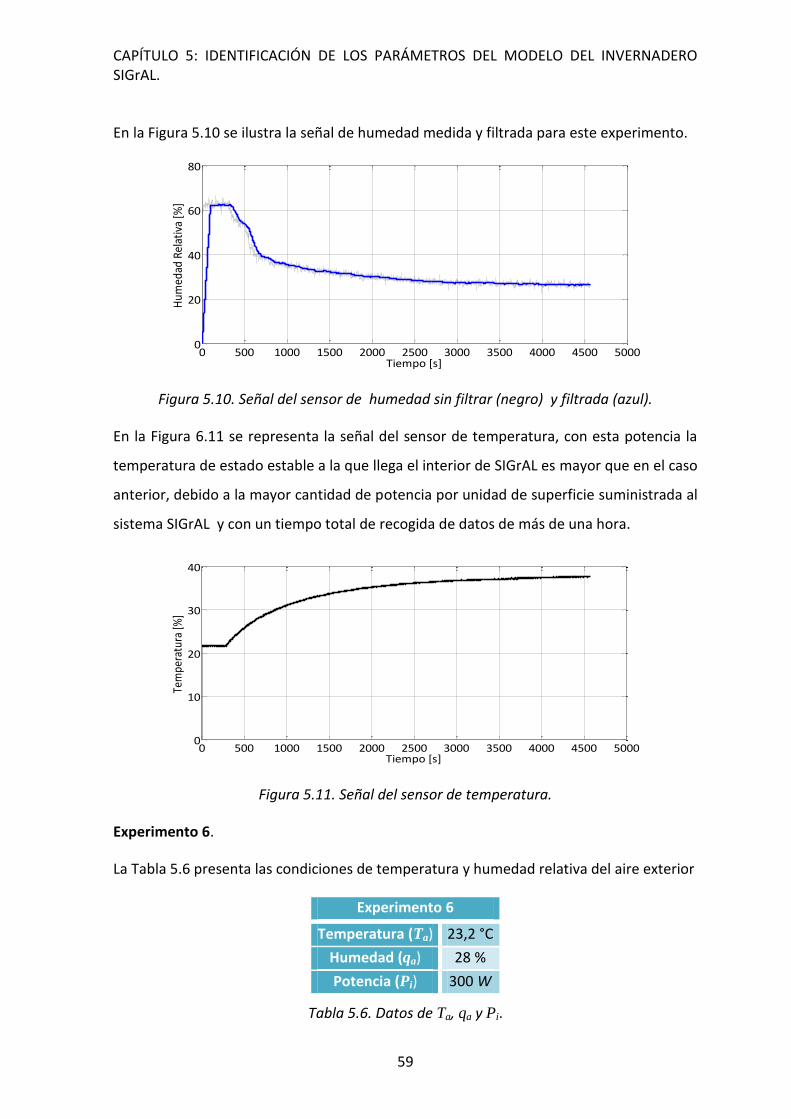
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
59
En la Figura 5.10 se ilustra la señal de humedad medida y filtrada para este experimento.
Figura 5.10. Señal del sensor de humedad sin filtrar (negro) y filtrada (azul).
En la Figura 6.11 se representa la señal del sensor de temperatura, con esta potencia la
temperatura de estado estable a la que llega el interior de SIGrAL es mayor que en el caso
anterior, debido a la mayor cantidad de potencia por unidad de superficie suministrada al
sistema SIGrAL y con un tiempo total de recogida de datos de más de una hora.
Figura 5.11. Señal del sensor de temperatura.
Experimento 6.
La Tabla 5.6 presenta las condiciones de temperatura y humedad relativa del aire exterior
Experimento 6
Temperatura (Ta) 23,2 °C
Humedad (qa) 28 %
Potencia (Pi) 300 W
Tabla 5.6. Datos de Ta, qa y Pi.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
Tiempo [s]
Hum
edad
Rel
ativ
a [%
]
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
Tiempo [s]
Tem
pera
tura
[%]
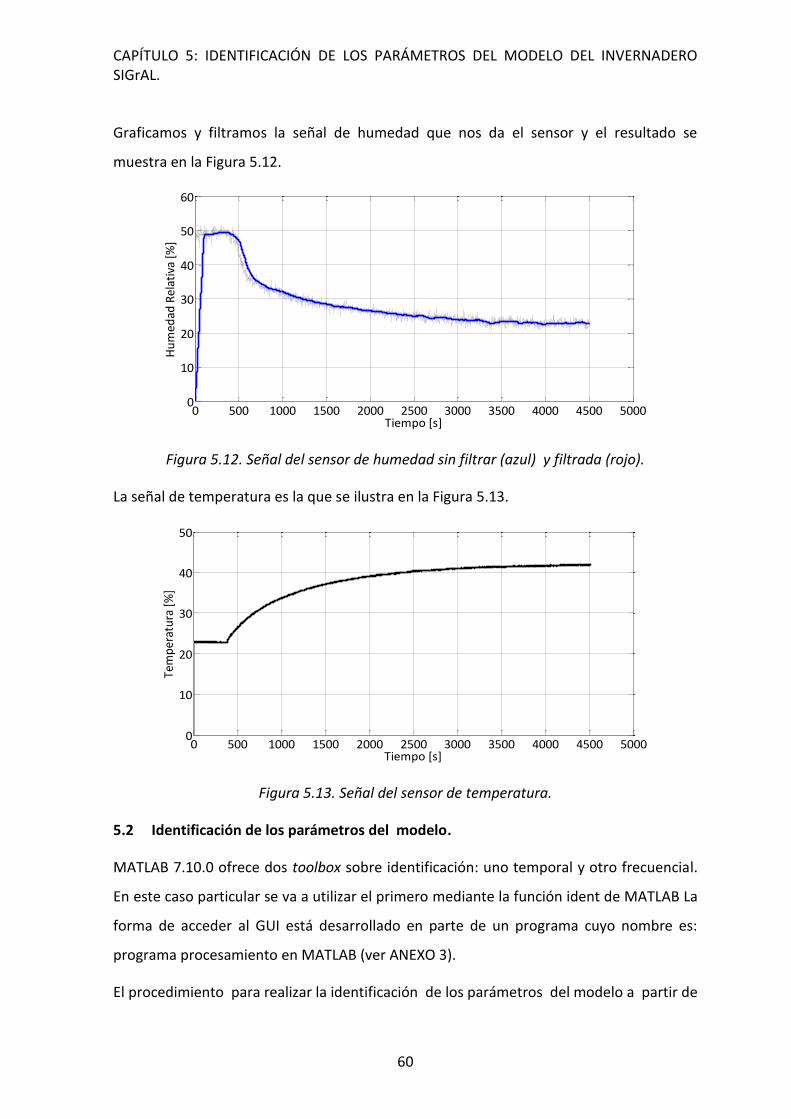
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
60
Graficamos y filtramos la señal de humedad que nos da el sensor y el resultado se
muestra en la Figura 5.12.
Figura 5.12. Señal del sensor de humedad sin filtrar (azul) y filtrada (rojo).
La señal de temperatura es la que se ilustra en la Figura 5.13.
Figura 5.13. Señal del sensor de temperatura.
5.2 Identificación de los parámetros del modelo.
MATLAB 7.10.0 ofrece dos toolbox sobre identificación: uno temporal y otro frecuencial.
En este caso particular se va a utilizar el primero mediante la función ident de MATLAB La
forma de acceder al GUI está desarrollado en parte de un programa cuyo nombre es:
programa procesamiento en MATLAB (ver ANEXO 3).
El procedimiento para realizar la identificación de los parámetros del modelo a partir de
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
60
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
Tiempo [s]
Tem
per
atu
ra [
%]
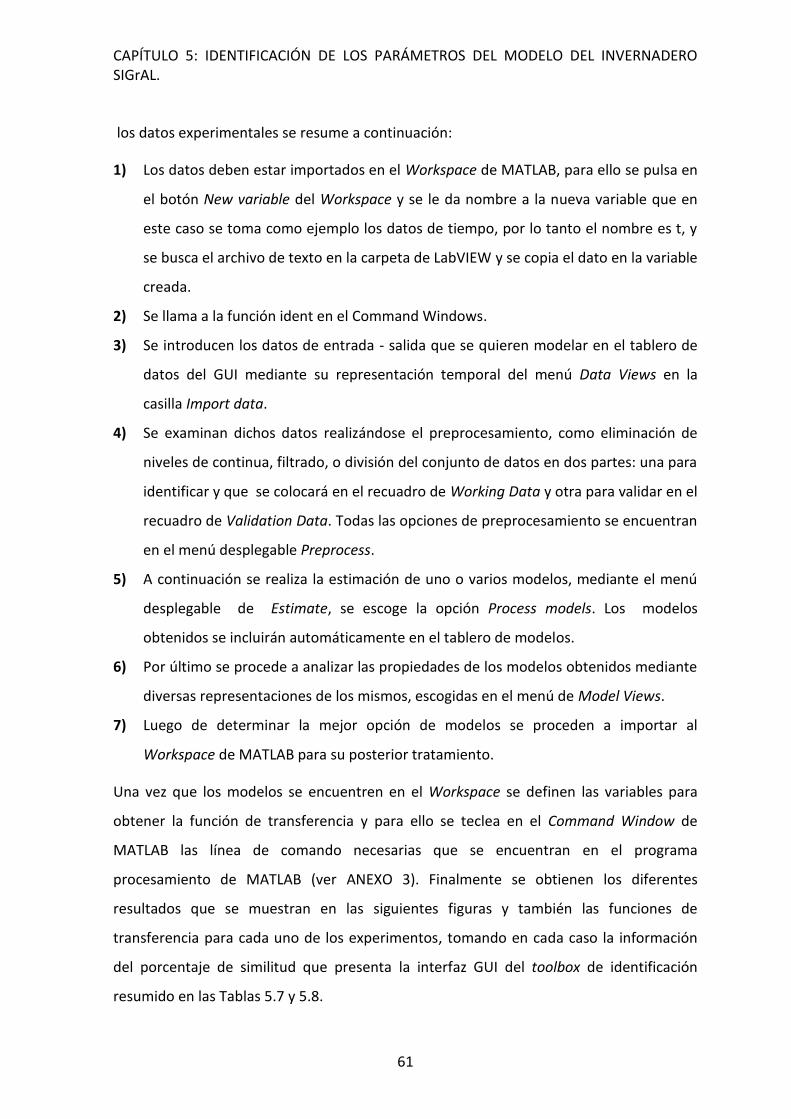
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
61
los datos experimentales se resume a continuación:
1) Los datos deben estar importados en el Workspace de MATLAB, para ello se pulsa en
el botón New variable del Workspace y se le da nombre a la nueva variable que en
este caso se toma como ejemplo los datos de tiempo, por lo tanto el nombre es t, y
se busca el archivo de texto en la carpeta de LabVIEW y se copia el dato en la variable
creada.
2) Se llama a la función ident en el Command Windows.
3) Se introducen los datos de entrada - salida que se quieren modelar en el tablero de
datos del GUI mediante su representación temporal del menú Data Views en la
casilla Import data.
4) Se examinan dichos datos realizándose el preprocesamiento, como eliminación de
niveles de continua, filtrado, o división del conjunto de datos en dos partes: una para
identificar y que se colocará en el recuadro de Working Data y otra para validar en el
recuadro de Validation Data. Todas las opciones de preprocesamiento se encuentran
en el menú desplegable Preprocess.
5) A continuación se realiza la estimación de uno o varios modelos, mediante el menú
desplegable de Estimate, se escoge la opción Process models. Los modelos
obtenidos se incluirán automáticamente en el tablero de modelos.
6) Por último se procede a analizar las propiedades de los modelos obtenidos mediante
diversas representaciones de los mismos, escogidas en el menú de Model Views.
7) Luego de determinar la mejor opción de modelos se proceden a importar al
Workspace de MATLAB para su posterior tratamiento.
Una vez que los modelos se encuentren en el Workspace se definen las variables para
obtener la función de transferencia y para ello se teclea en el Command Window de
MATLAB las línea de comando necesarias que se encuentran en el programa
procesamiento de MATLAB (ver ANEXO 3). Finalmente se obtienen los diferentes
resultados que se muestran en las siguientes figuras y también las funciones de
transferencia para cada uno de los experimentos, tomando en cada caso la información
del porcentaje de similitud que presenta la interfaz GUI del toolbox de identificación
resumido en las Tablas 5.7 y 5.8.
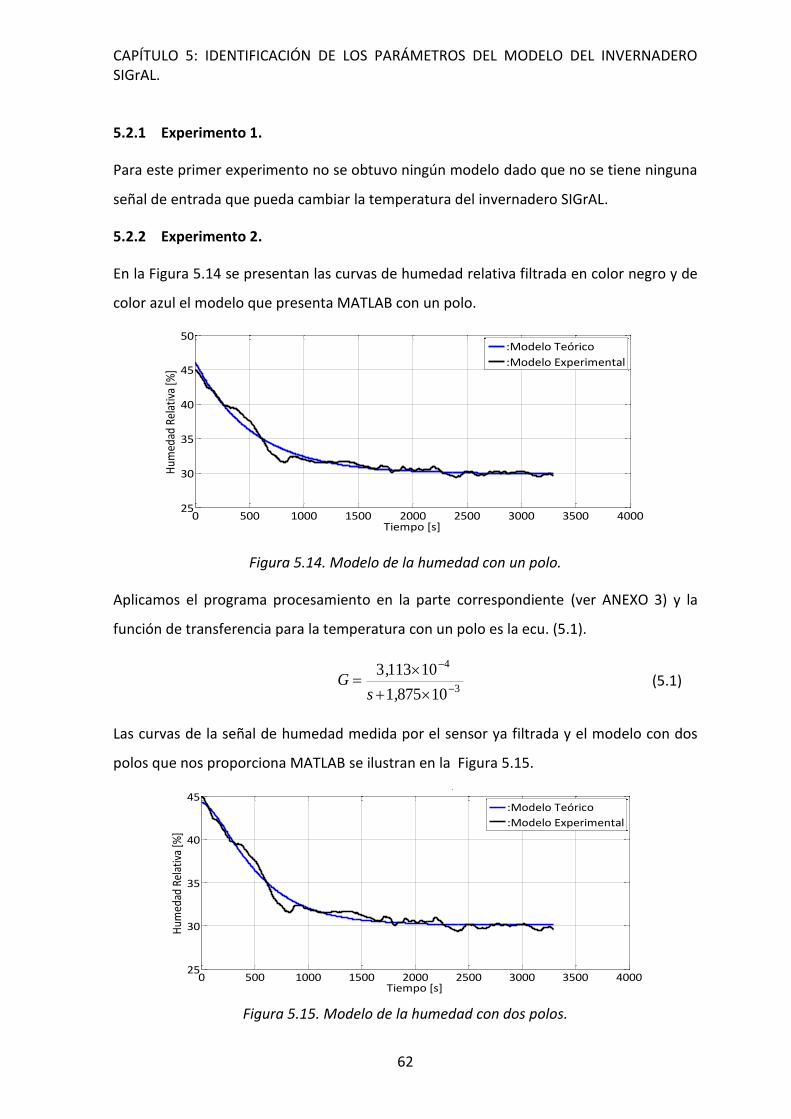
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
62
5.2.1 Experimento 1.
Para este primer experimento no se obtuvo ningún modelo dado que no se tiene ninguna
señal de entrada que pueda cambiar la temperatura del invernadero SIGrAL.
5.2.2 Experimento 2.
En la Figura 5.14 se presentan las curvas de humedad relativa filtrada en color negro y de
color azul el modelo que presenta MATLAB con un polo.
Figura 5.14. Modelo de la humedad con un polo.
Aplicamos el programa procesamiento en la parte correspondiente (ver ANEXO 3) y la
función de transferencia para la temperatura con un polo es la ecu. (5.1).
3
4
108751
101133
,s
,G (5.1)
Las curvas de la señal de humedad medida por el sensor ya filtrada y el modelo con dos
polos que nos proporciona MATLAB se ilustran en la Figura 5.15.
Figura 5.15. Modelo de la humedad con dos polos.
0 500 1000 1500 2000 2500 3000 3500 400025
30
35
40
45
50
Tiempo [s]
Hum
edad
Rel
ativ
a [%
]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400025
30
35
40
45
Tiempo [s]
Hum
edad
Rel
ativ
a [%
]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
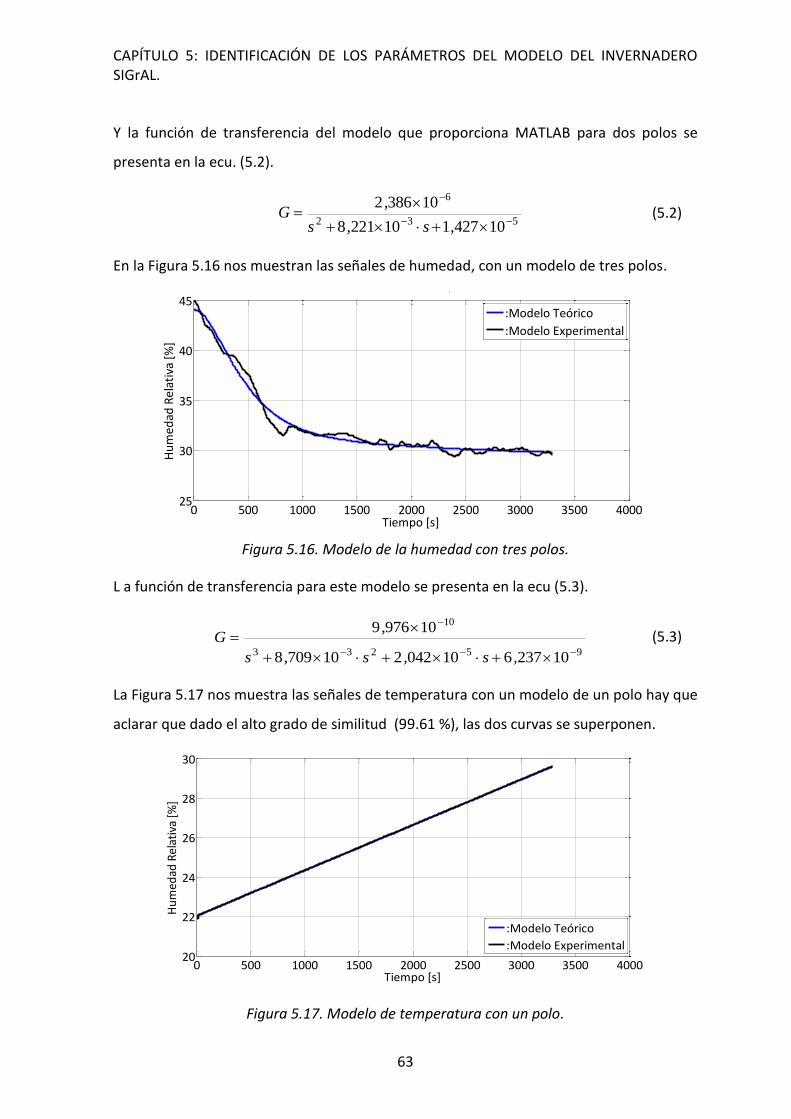
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
63
Y la función de transferencia del modelo que proporciona MATLAB para dos polos se
presenta en la ecu. (5.2).
532
6
104271102218
103862
,s,s
,G (5.2)
En la Figura 5.16 nos muestran las señales de humedad, con un modelo de tres polos.
Figura 5.16. Modelo de la humedad con tres polos.
L a función de transferencia para este modelo se presenta en la ecu (5.3).
95233
10
102376100422107098
109769
,s,s,s
,G (5.3)
La Figura 5.17 nos muestra las señales de temperatura con un modelo de un polo hay que
aclarar que dado el alto grado de similitud (99.61 %), las dos curvas se superponen.
Figura 5.17. Modelo de temperatura con un polo.
0 500 1000 1500 2000 2500 3000 3500 400025
30
35
40
45
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400020
22
24
26
28
30
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
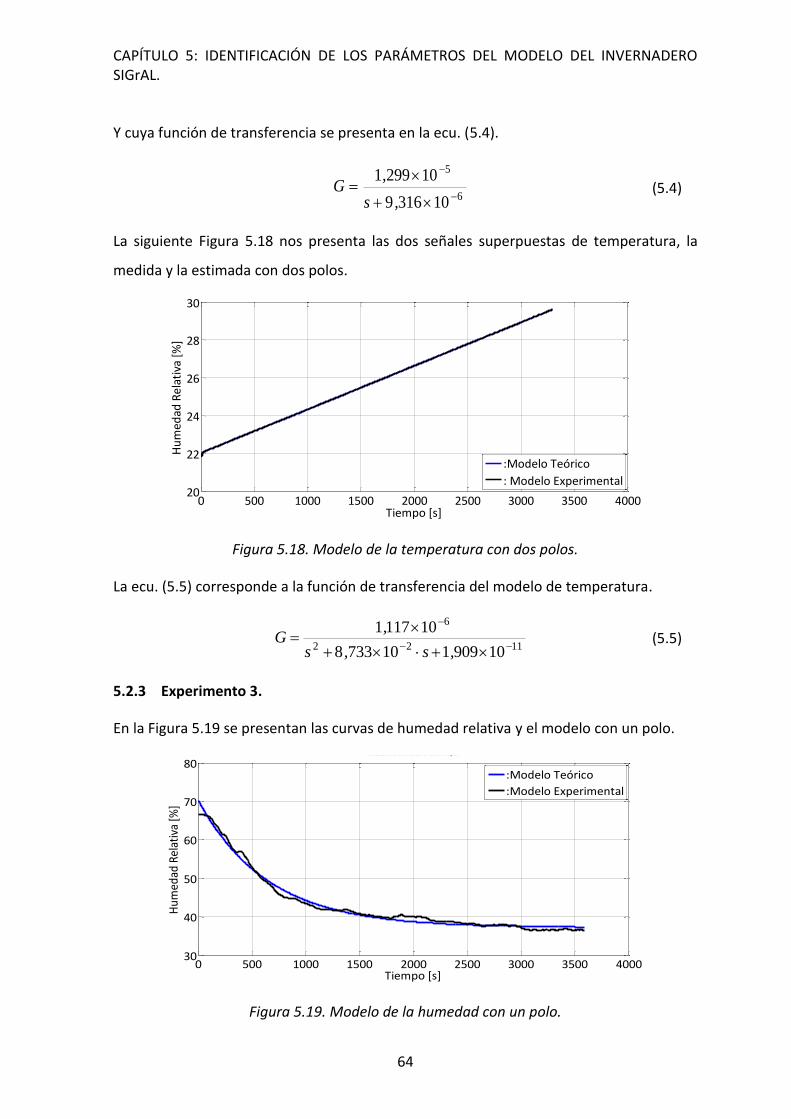
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
64
Y cuya función de transferencia se presenta en la ecu. (5.4).
6
5
103169
102991
,s
,G (5.4)
La siguiente Figura 5.18 nos presenta las dos señales superpuestas de temperatura, la
medida y la estimada con dos polos.
Figura 5.18. Modelo de la temperatura con dos polos.
La ecu. (5.5) corresponde a la función de transferencia del modelo de temperatura.
1122
6
109091107338
101171
,s,s
,G (5.5)
5.2.3 Experimento 3.
En la Figura 5.19 se presentan las curvas de humedad relativa y el modelo con un polo.
Figura 5.19. Modelo de la humedad con un polo.
0 500 1000 1500 2000 2500 3000 3500 400020
22
24
26
28
30
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo Teórico
: Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400030
40
50
60
70
80
Tiempo [s]
Hum
edad
Rel
ativ
a [%
]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
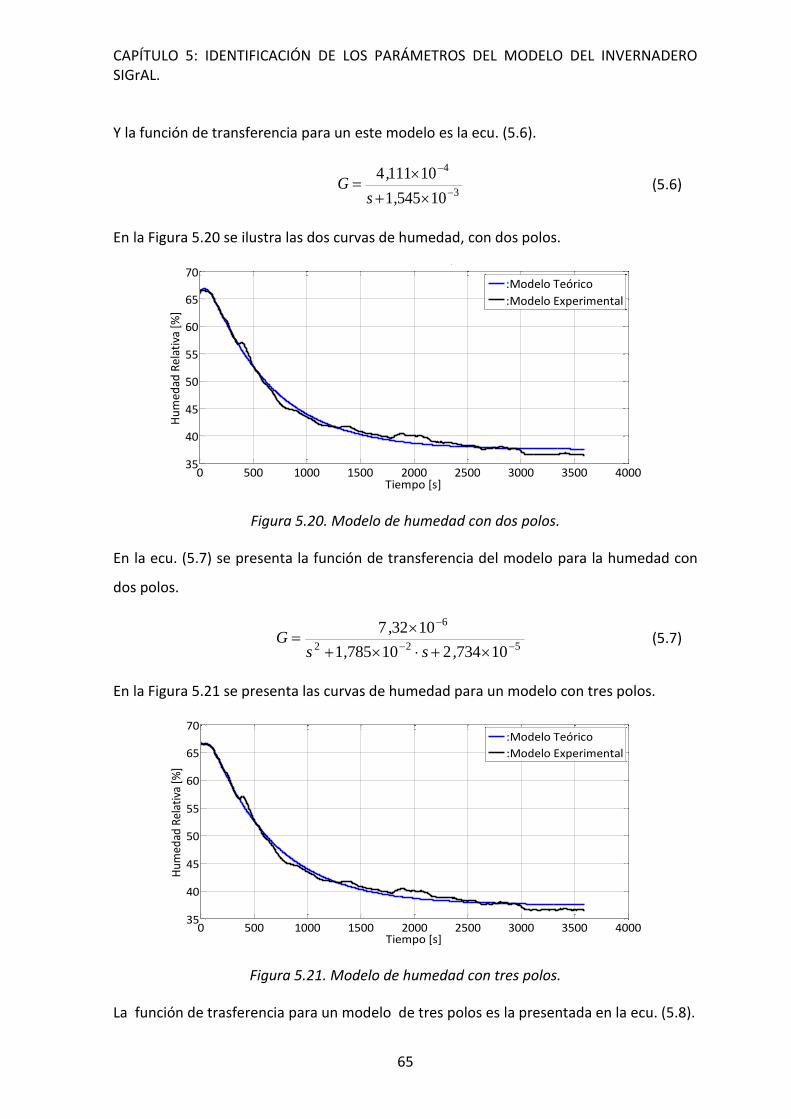
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
65
Y la función de transferencia para un este modelo es la ecu. (5.6).
3
4
105451
101114
,s
,G (5.6)
En la Figura 5.20 se ilustra las dos curvas de humedad, con dos polos.
Figura 5.20. Modelo de humedad con dos polos.
En la ecu. (5.7) se presenta la función de transferencia del modelo para la humedad con
dos polos.
522
6
107342107851
10327
,s,s
,G (5.7)
En la Figura 5.21 se presenta las curvas de humedad para un modelo con tres polos.
Figura 5.21. Modelo de humedad con tres polos.
La función de trasferencia para un modelo de tres polos es la presentada en la ecu. (5.8).
0 500 1000 1500 2000 2500 3000 3500 400035
40
45
50
55
60
65
70
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400035
40
45
50
55
60
65
70
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
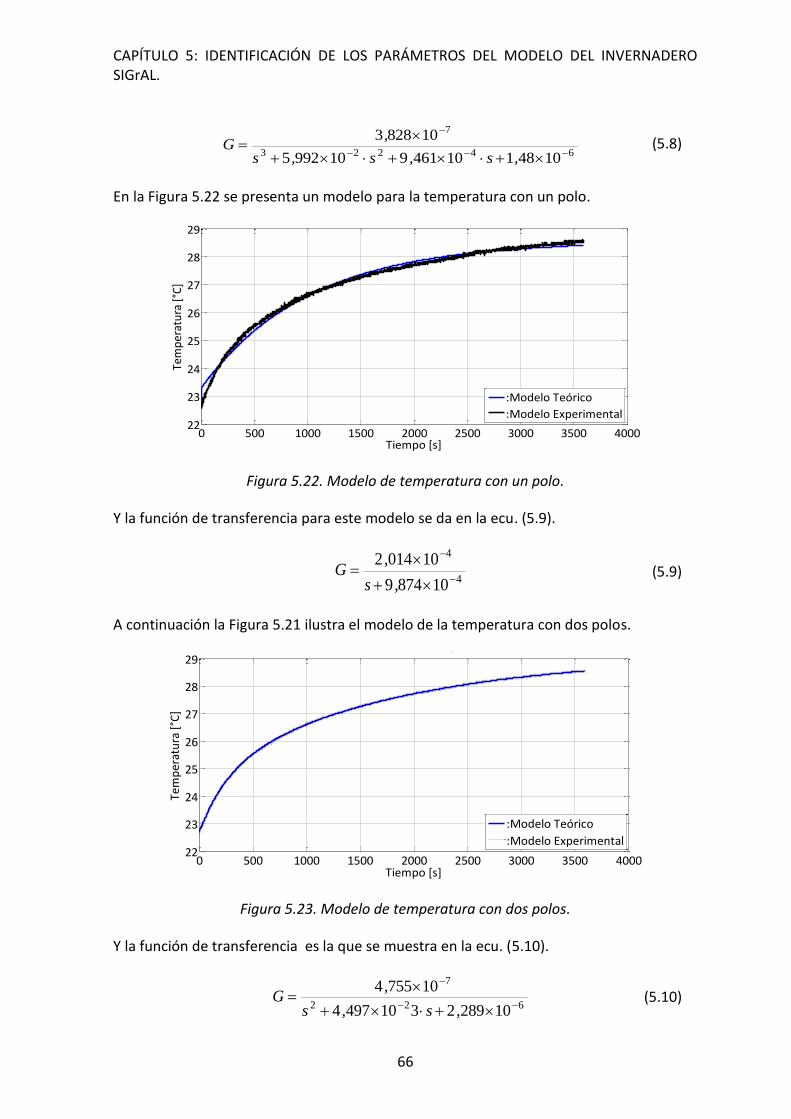
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
66
64223
7
10481104619109925
108283
,s,s,s
,G (5.8)
En la Figura 5.22 se presenta un modelo para la temperatura con un polo.
Figura 5.22. Modelo de temperatura con un polo.
Y la función de transferencia para este modelo se da en la ecu. (5.9).
4
4
108749
100142
,s
,G (5.9)
A continuación la Figura 5.21 ilustra el modelo de la temperatura con dos polos.
Figura 5.23. Modelo de temperatura con dos polos.
Y la función de transferencia es la que se muestra en la ecu. (5.10).
622
7
1028923104974
107554
,s,s
,G (5.10)
0 500 1000 1500 2000 2500 3000 3500 400022
23
24
25
26
27
28
29
Tiempo [s]
Tem
per
atu
ra [
°C]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400022
23
24
25
26
27
28
29
Tiempo [s]
Tem
per
atu
ra [
°C]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
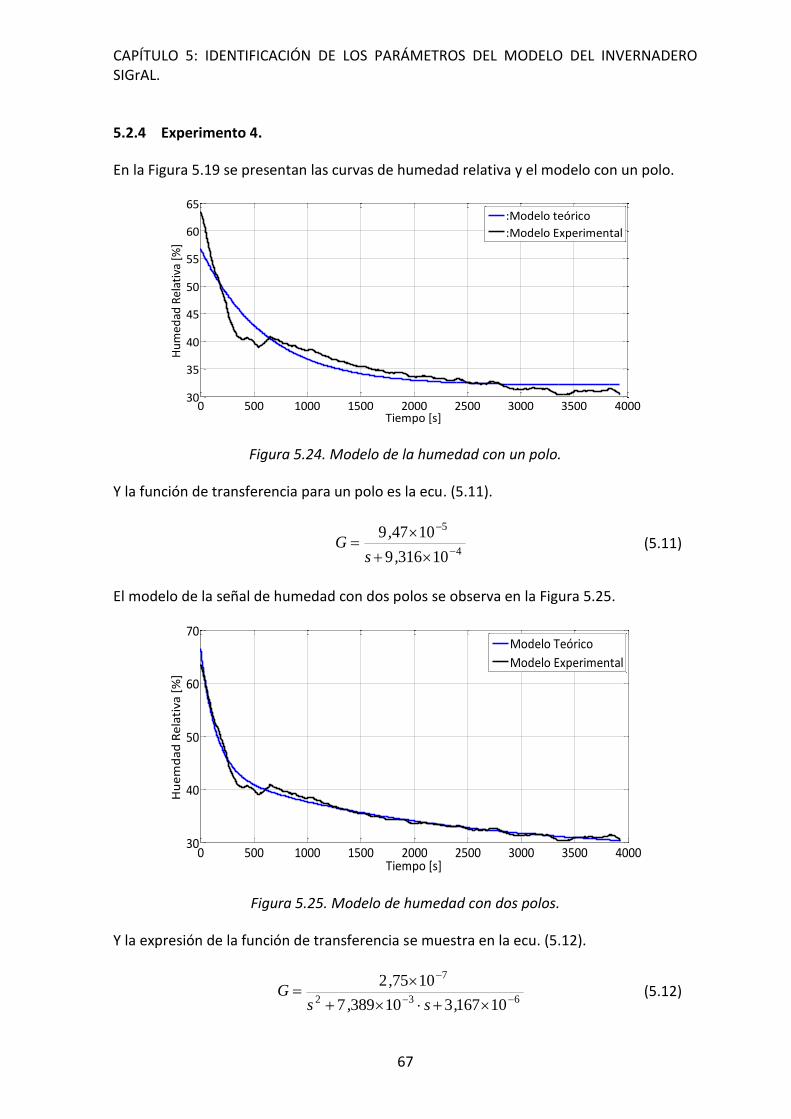
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
67
5.2.4 Experimento 4.
En la Figura 5.19 se presentan las curvas de humedad relativa y el modelo con un polo.
Figura 5.24. Modelo de la humedad con un polo.
Y la función de transferencia para un polo es la ecu. (5.11).
4
5
103169
10479
,s
,G (5.11)
El modelo de la señal de humedad con dos polos se observa en la Figura 5.25.
Figura 5.25. Modelo de humedad con dos polos.
Y la expresión de la función de transferencia se muestra en la ecu. (5.12).
632
7
101673103897
10752
,s,s
,G (5.12)
0 500 1000 1500 2000 2500 3000 3500 400030
35
40
45
50
55
60
65
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400030
40
50
60
70
Tiempo [s]
Hu
em
da
d R
ela
tiva
[%
]
Measured and simulated model output
Modelo Teórico
Modelo Experimental
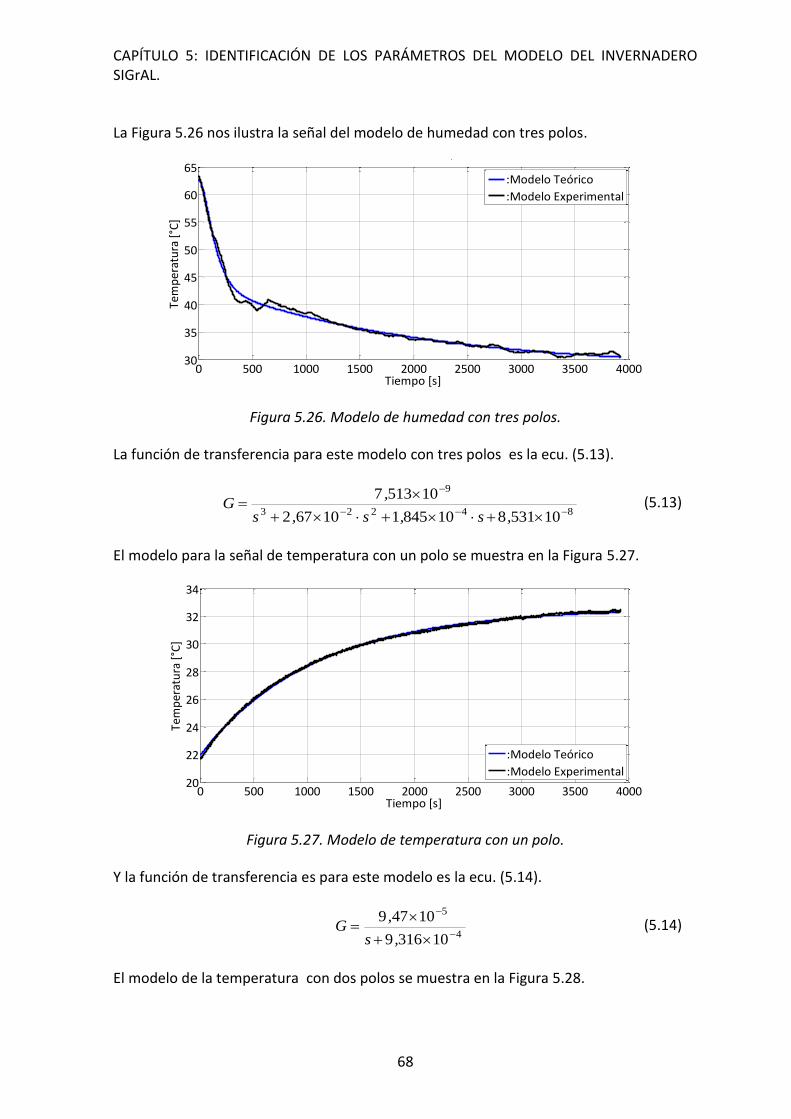
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
68
La Figura 5.26 nos ilustra la señal del modelo de humedad con tres polos.
Figura 5.26. Modelo de humedad con tres polos.
La función de transferencia para este modelo con tres polos es la ecu. (5.13).
84223
9
10531810845110672
105137
,s,s,s
,G (5.13)
El modelo para la señal de temperatura con un polo se muestra en la Figura 5.27.
Figura 5.27. Modelo de temperatura con un polo.
Y la función de transferencia es para este modelo es la ecu. (5.14).
4
5
103169
10479
,s
,G (5.14)
El modelo de la temperatura con dos polos se muestra en la Figura 5.28.
0 500 1000 1500 2000 2500 3000 3500 400030
35
40
45
50
55
60
65
Tiempo [s]
Tem
per
atu
ra [
°C]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 400020
22
24
26
28
30
32
34
Tiempo [s]
Tem
per
atu
ra [
°C]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
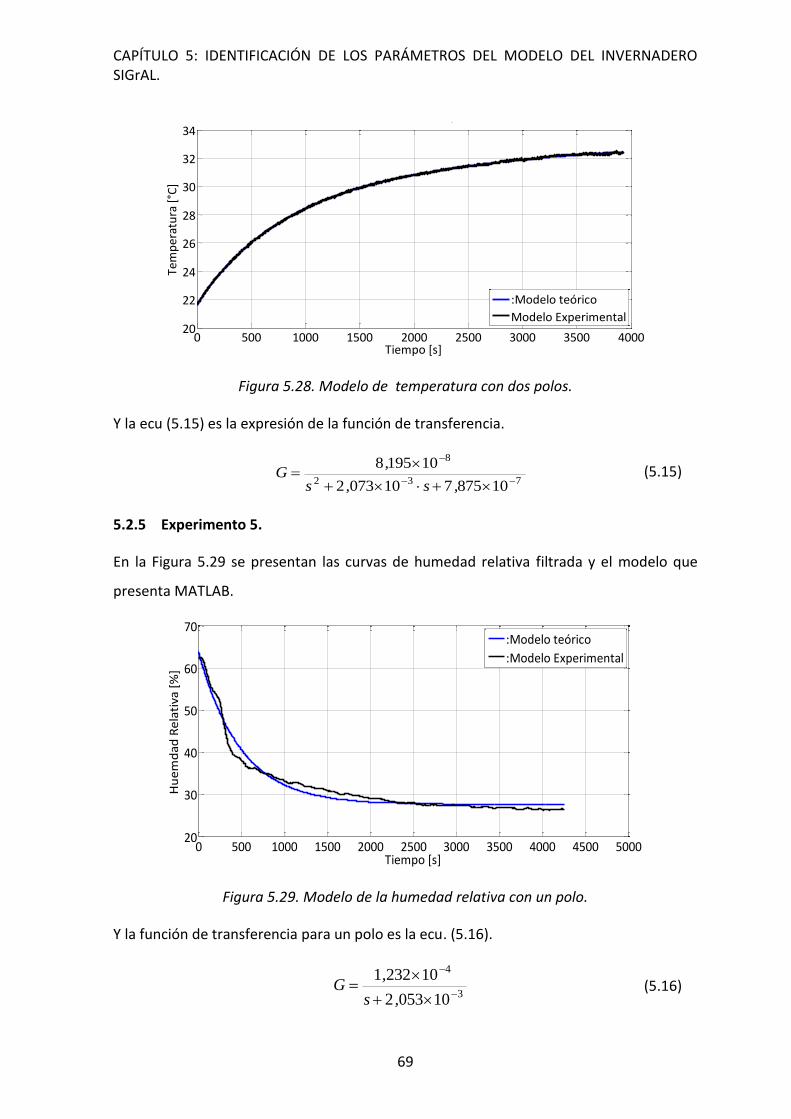
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
69
Figura 5.28. Modelo de temperatura con dos polos.
Y la ecu (5.15) es la expresión de la función de transferencia.
732
8
108757100732
101958
,s,s
,G (5.15)
5.2.5 Experimento 5.
En la Figura 5.29 se presentan las curvas de humedad relativa filtrada y el modelo que
presenta MATLAB.
Figura 5.29. Modelo de la humedad relativa con un polo.
Y la función de transferencia para un polo es la ecu. (5.16).
3
4
100532
102321
,s
,G (5.16)
0 500 1000 1500 2000 2500 3000 3500 400020
22
24
26
28
30
32
34
Tiempo [s]
Tem
per
atu
ra [
°C]
Measured and simulated model output
:Modelo teórico
Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
30
40
50
60
70
Tiempo [s]
Hu
em
dad
Re
lati
va [
%]
Measured and simulated model output
:Modelo teórico
:Modelo Experimental
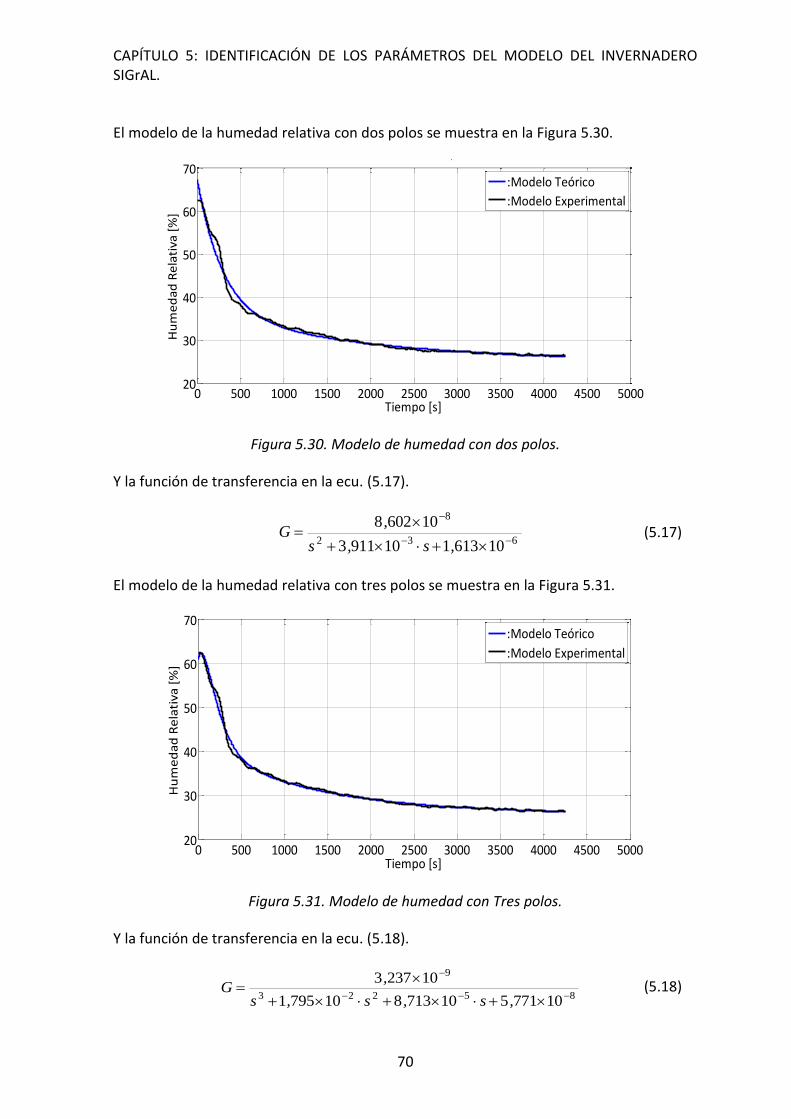
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
70
El modelo de la humedad relativa con dos polos se muestra en la Figura 5.30.
Figura 5.30. Modelo de humedad con dos polos.
Y la función de transferencia en la ecu. (5.17).
632
8
106131109113
106028
,s,s
,G (5.17)
El modelo de la humedad relativa con tres polos se muestra en la Figura 5.31.
Figura 5.31. Modelo de humedad con Tres polos.
Y la función de transferencia en la ecu. (5.18).
85223
9
107715107138107951
102373
,s,s,s
,G (5.18)
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
30
40
50
60
70
Tiempo [s]
Hu
me
da
d R
ela
tiva
[%
]Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
30
40
50
60
70
Tiempo [s]
Hu
me
da
d R
ela
tiva
[%
]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
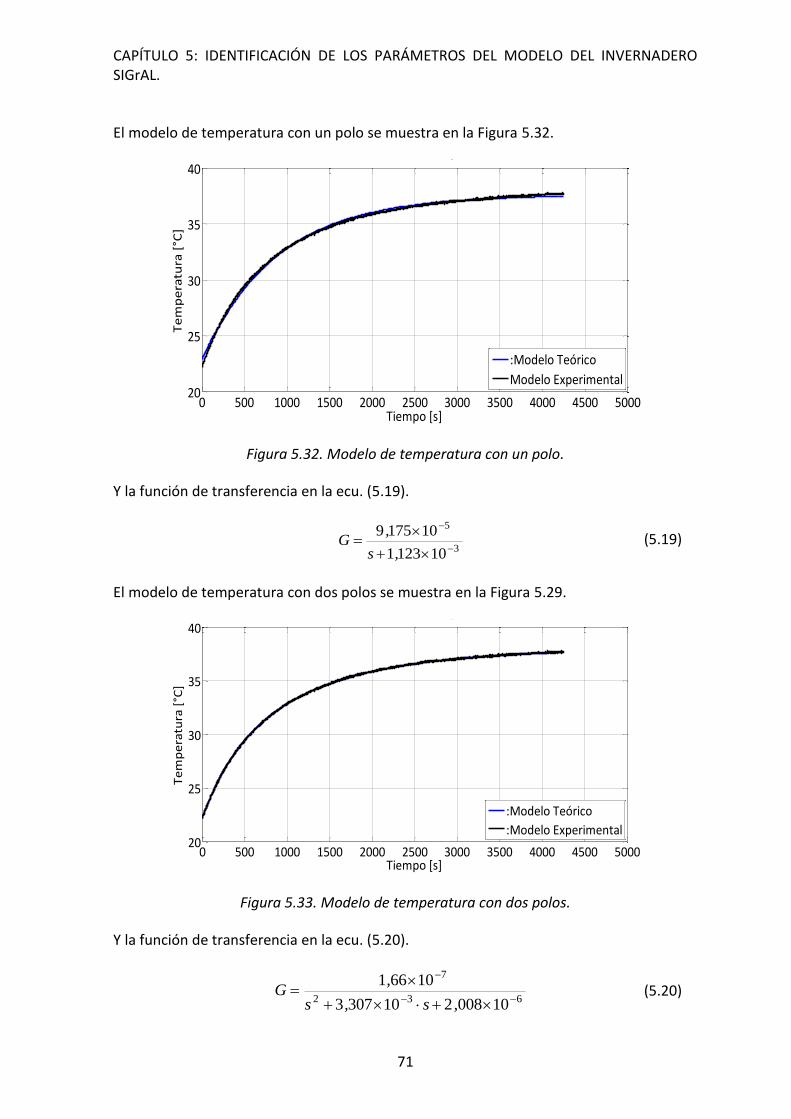
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
71
El modelo de temperatura con un polo se muestra en la Figura 5.32.
Figura 5.32. Modelo de temperatura con un polo.
Y la función de transferencia en la ecu. (5.19).
3
5
101231
101759
,s
,G (5.19)
El modelo de temperatura con dos polos se muestra en la Figura 5.29.
Figura 5.33. Modelo de temperatura con dos polos.
Y la función de transferencia en la ecu. (5.20).
632
7
100082103073
10661
,s,s
,G (5.20)
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
25
30
35
40
Tiempo [s]
Te
mp
era
tura
[°C
]
Measured and simulated model output
:Modelo Teórico
Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
25
30
35
40
Tiempo [s]
Te
mp
era
tura
[°C
]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
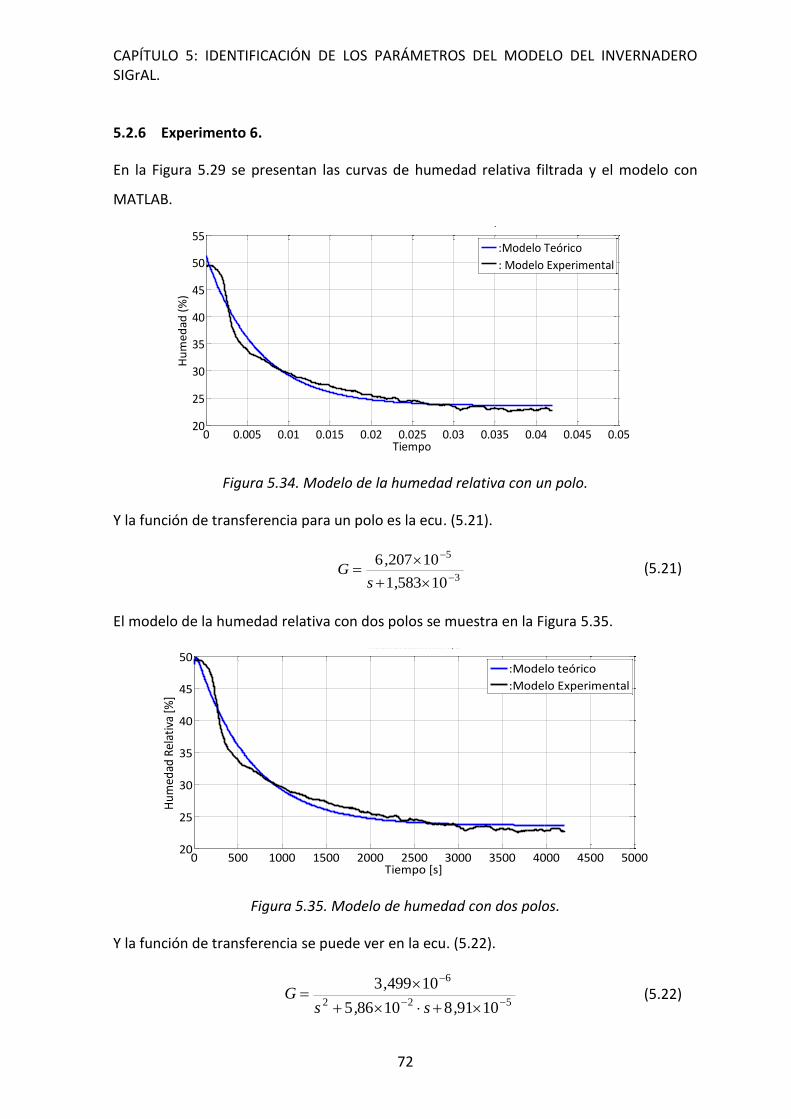
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
72
5.2.6 Experimento 6.
En la Figura 5.29 se presentan las curvas de humedad relativa filtrada y el modelo con
MATLAB.
Figura 5.34. Modelo de la humedad relativa con un polo.
Y la función de transferencia para un polo es la ecu. (5.21).
3
5
105831
102076
,s
,G (5.21)
El modelo de la humedad relativa con dos polos se muestra en la Figura 5.35.
Figura 5.35. Modelo de humedad con dos polos.
Y la función de transferencia se puede ver en la ecu. (5.22).
522
6
1091810865
104993
,s,s
,G (5.22)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.0520
25
30
35
40
45
50
55
Tiempo
Hu
me
dad
(%
)
Measured and simulated model output
:Modelo Teórico
: Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
25
30
35
40
45
50
Tiempo [s]
Hu
med
ad R
elat
iva
[%]
Measured and simulated model output
:Modelo teórico
:Modelo Experimental
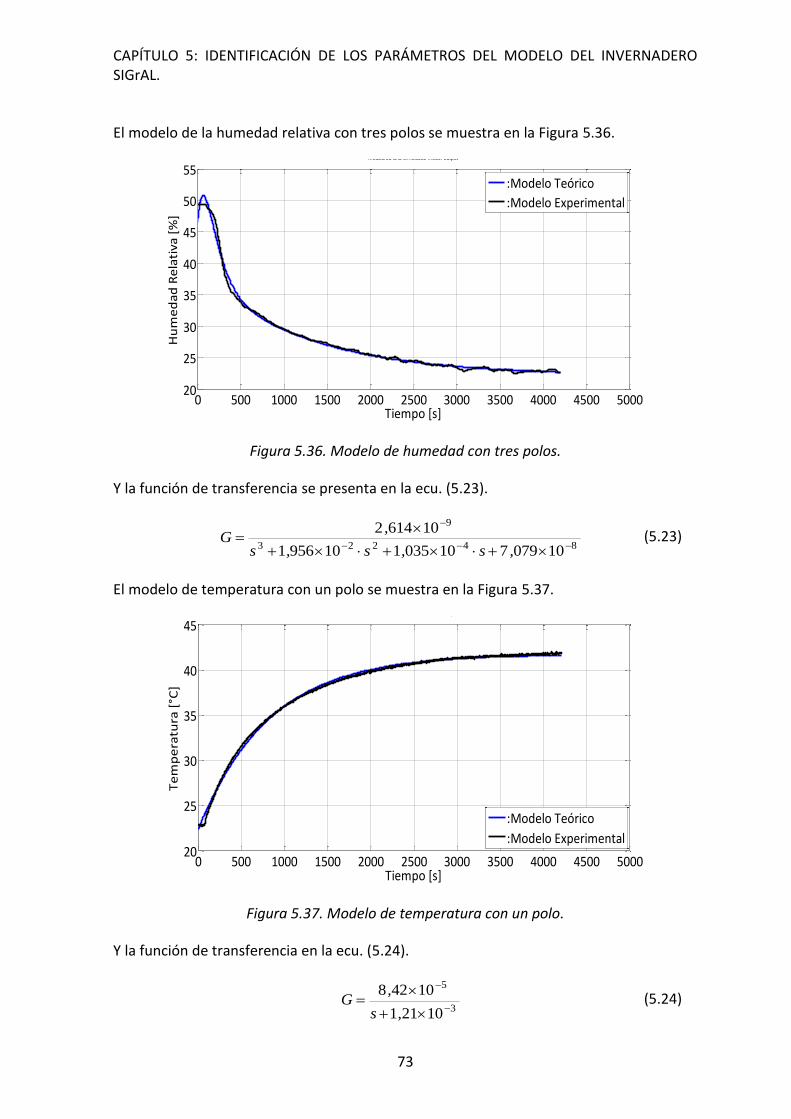
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
73
El modelo de la humedad relativa con tres polos se muestra en la Figura 5.36.
Figura 5.36. Modelo de humedad con tres polos.
Y la función de transferencia se presenta en la ecu. (5.23).
84223
9
100797100351109561
106142
,s,s,s
,G (5.23)
El modelo de temperatura con un polo se muestra en la Figura 5.37.
Figura 5.37. Modelo de temperatura con un polo.
Y la función de transferencia en la ecu. (5.24).
3
5
10211
10428
,s
,G (5.24)
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
25
30
35
40
45
50
55
Tiempo [s]
Hu
me
da
d R
ela
tiva
[%
]Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
25
30
35
40
45
Tiempo [s]
Te
mp
era
tura
[°C
]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
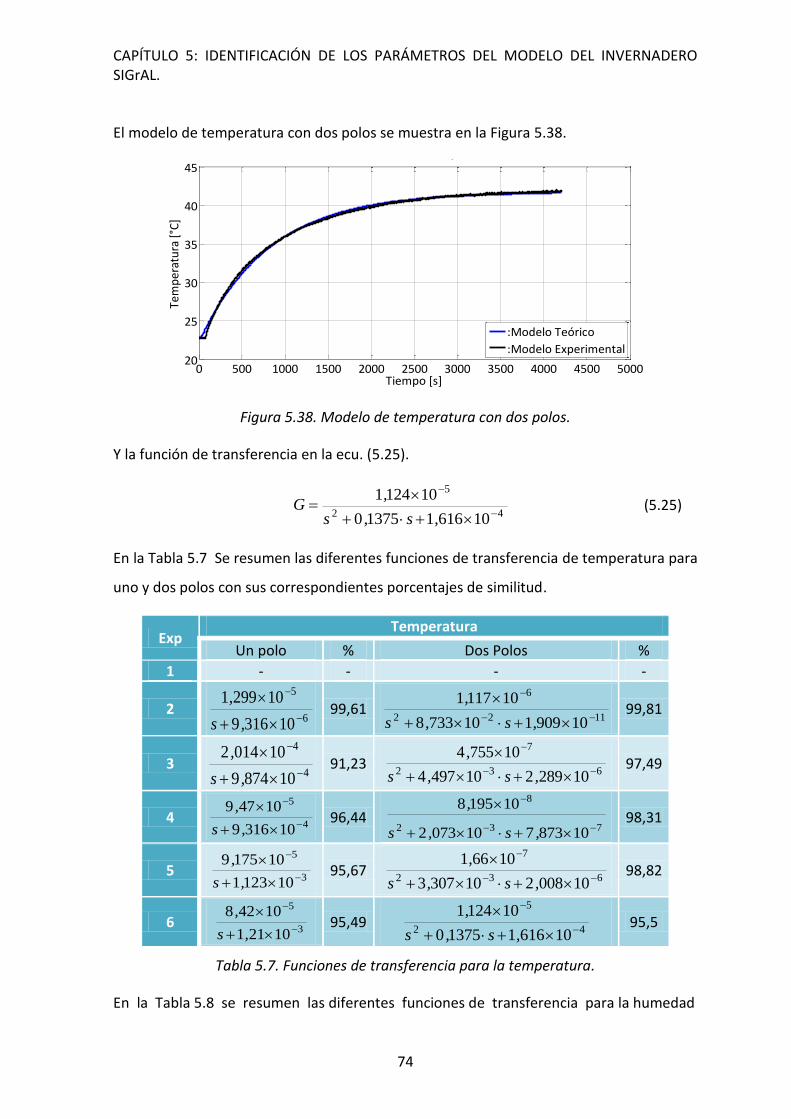
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
74
El modelo de temperatura con dos polos se muestra en la Figura 5.38.
Figura 5.38. Modelo de temperatura con dos polos.
Y la función de transferencia en la ecu. (5.25).
42
5
10616113750
101241
,s,s
,G (5.25)
En la Tabla 5.7 Se resumen las diferentes funciones de transferencia de temperatura para
uno y dos polos con sus correspondientes porcentajes de similitud.
Exp Temperatura
Un polo % Dos Polos %
1 - - - -
2 6
5
103169
102991
,s
, 99,61
1122
6
109091107338
101171
,s,s
, 99,81
3 4
4
108749
100142
,s
, 91,23
632
7
102892104974
107554
,s,s
, 97,49
4 4
5
103169
10479
,s
, 96,44
732
8
108737100732
101958
,s,s
, 98,31
5 3
5
101231
101759
,s
, 95,67
632
7
100082103073
10661
,s,s
, 98,82
6 3
5
10211
10428
,s
, 95,49
42
5
10616113750
101241
,s,s
, 95,5
Tabla 5.7. Funciones de transferencia para la temperatura.
En la Tabla 5.8 se resumen las diferentes funciones de transferencia para la humedad
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500020
25
30
35
40
45
Tiempo [s]
Tem
per
atu
ra [
°C]
Measured and simulated model output
:Modelo Teórico
:Modelo Experimental
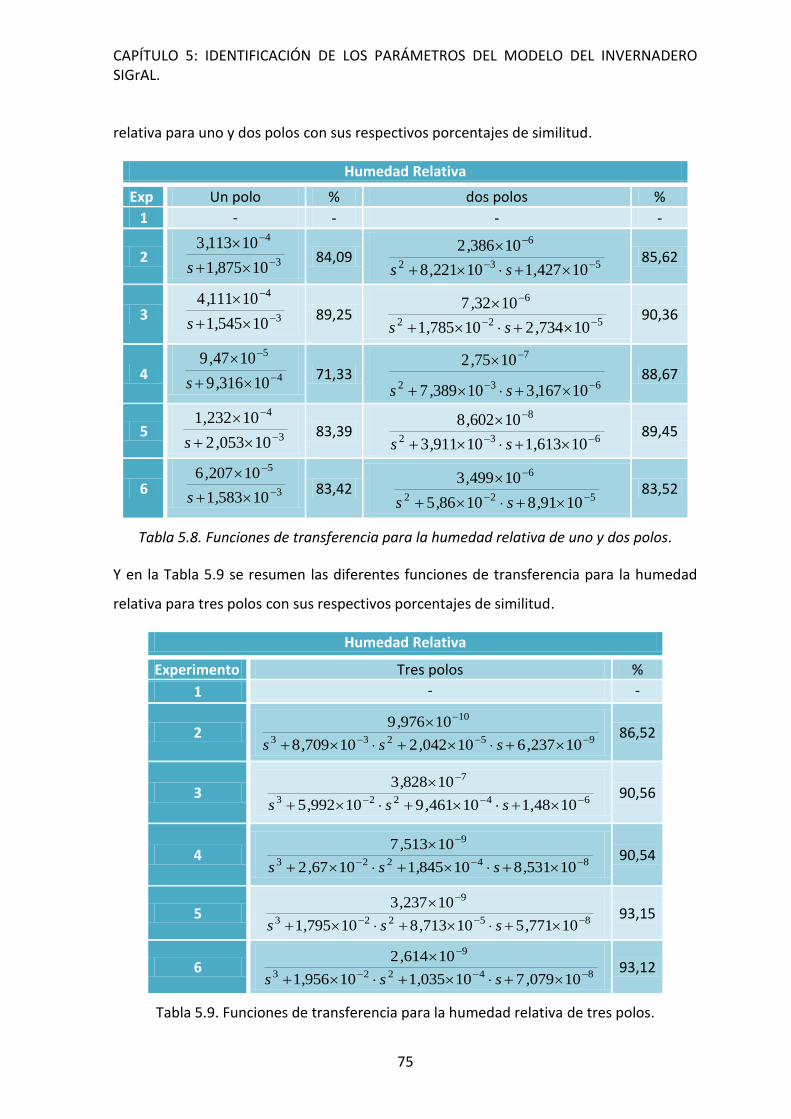
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
75
relativa para uno y dos polos con sus respectivos porcentajes de similitud.
Humedad Relativa
Exp Un polo % dos polos %
1 - - - -
2 3
4
108751
101133
,s
, 84,09
532
6
104271102218
103862
,s,s
, 85,62
3 3
4
105451
101114
,s
, 89,25
522
6
107342107851
10327
,s,s
, 90,36
4 4
5
103169
10479
,s
, 71,33
632
7
101673103897
10752
,s,s
, 88,67
5 3
4
100532
102321
,s
, 83,39
632
8
106131109113
106028
,s,s
, 89,45
6 3
5
105831
102076
,s
, 83,42
522
6
1091810865
104993
,s,s
, 83,52
Tabla 5.8. Funciones de transferencia para la humedad relativa de uno y dos polos.
Y en la Tabla 5.9 se resumen las diferentes funciones de transferencia para la humedad
relativa para tres polos con sus respectivos porcentajes de similitud.
Humedad Relativa
Experimento Tres polos %
1 - -
2 95233
10
102376100422107098
109769
,s,s,s
, 86,52
3 64223
7
10481104619109925
108283
,s,s,s
, 90,56
4 84223
9
10531810845110672
105137
,s,s,s
, 90,54
5 85223
9
107715107138107951
102373
,s,s,s
, 93,15
6 84223
9
100797100351109561
106142
,s,s,s
, 93,12
Tabla 5.9. Funciones de transferencia para la humedad relativa de tres polos.
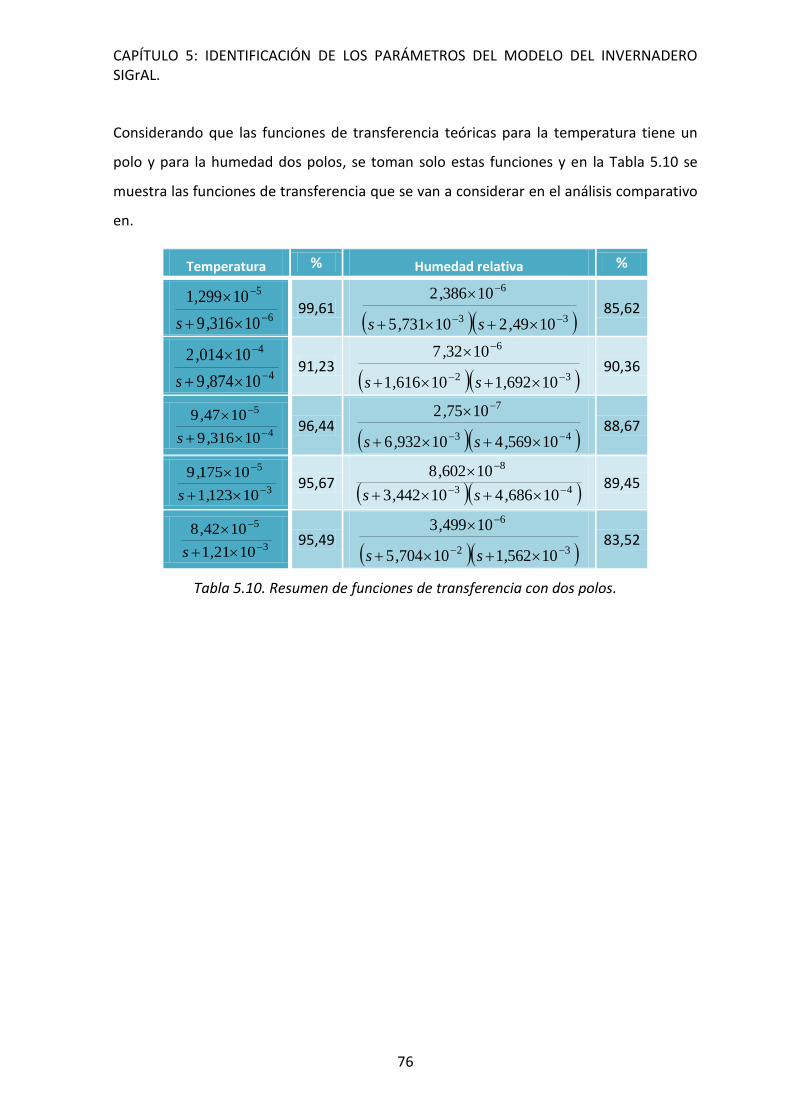
CAPÍTULO 5: IDENTIFICACIÓN DE LOS PARÁMETROS DEL MODELO DEL INVERNADERO SIGrAL.
76
Considerando que las funciones de transferencia teóricas para la temperatura tiene un
polo y para la humedad dos polos, se toman solo estas funciones y en la Tabla 5.10 se
muestra las funciones de transferencia que se van a considerar en el análisis comparativo
en.
Temperatura % Humedad relativa %
6
5
103169
102991
,s
, 99,61
33
6
10492107315
103862
,s,s
, 85,62
4
4
108749
100142
,s
, 91,23
32
6
106921106161
10327
,s,s
, 90,36
4
5
103169
10479
,s
, 96,44
43
7
105694109326
10752
,s,s
, 88,67
3
5
101231
101759
,s
, 95,67
43
8
106864104423
106028
,s,s
, 89,45
3
5
10211
10428
,s
, 95,49
32
6
105621107045
104993
,s,s
, 83,52
Tabla 5.10. Resumen de funciones de transferencia con dos polos.
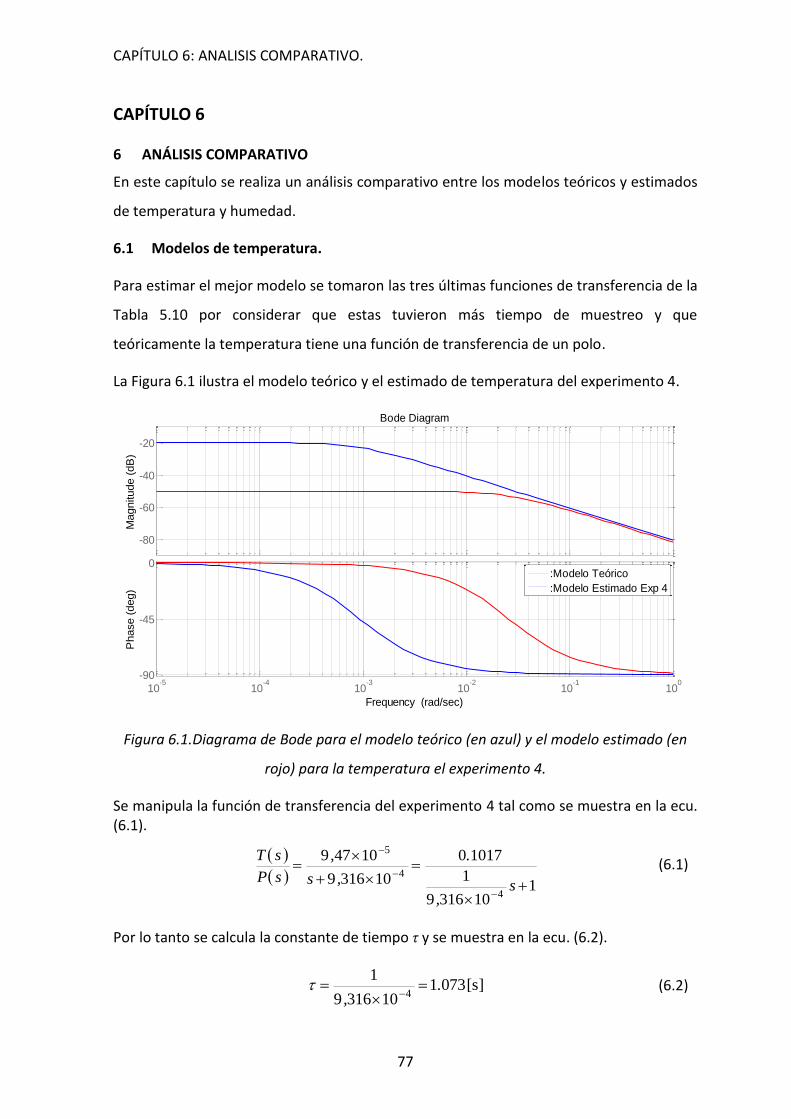
CAPÍTULO 6: ANALISIS COMPARATIVO.
77
CAPÍTULO 6
6 ANÁLISIS COMPARATIVO
En este capítulo se realiza un análisis comparativo entre los modelos teóricos y estimados
de temperatura y humedad.
6.1 Modelos de temperatura.
Para estimar el mejor modelo se tomaron las tres últimas funciones de transferencia de la
Tabla 5.10 por considerar que estas tuvieron más tiempo de muestreo y que
teóricamente la temperatura tiene una función de transferencia de un polo.
La Figura 6.1 ilustra el modelo teórico y el estimado de temperatura del experimento 4.
Figura 6.1.Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) para la temperatura el experimento 4.
Se manipula la función de transferencia del experimento 4 tal como se muestra en la ecu. (6.1).
1
103169
1
10170
103169
10479
4
4
5
s,
.
,s
,
sP
sT (6.1)
Por lo tanto se calcula la constante de tiempo τ y se muestra en la ecu. (6.2).
[s] 0731103169
14
.,
(6.2)
-80
-60
-40
-20
Magnitude (
dB
)
Bode Diagram
Frequency (rad/sec)
10-5
10-4
10-3
10-2
10-1
100
-90
-45
0
Phase (
deg)
:Modelo Teórico
:Modelo Estimado Exp 4

CAPÍTULO 6: ANALISIS COMPARATIVO.
78
Comparando la ecu (3.52) con la ec (6.2) la diferencia es de aproximadamente 96 %.
Observando el diagrama de bode que se presenta en la Figura 6.1, se puede apreciar que
el modelo estimado esta retazado con respecto al teórico en aproximadamente una
década y que la ganancia del modelo teórico es de 30 dB menos con respecto al modelo
estimado.
Por otro lado comparando las constantes de tiempo se aprecia una gran diferencia entre
el valor del modelo teórico y el estimado con un error del 96 %.
La Figura 6.2 ilustra el modelo teórico y el estimado de temperatura del experimento 5.
Figura 6.2. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la temperatura para el experimento 5.
Se manipula la función de transferencia del experimento 5 tal como se muestra en la ecu (6.3).
1
101231
1
08170
101231
101759
3
3
5
s,
.
,s
,
sP
sT (6.3)
Por lo tanto se calcula la constante de tiempo τ y se muestra en la ecu (6.4).
[s] 890101231
13
, (6.4)
Comparando la ecu (3.52) con la ecu (6.4) el error es de aproximadamente 95%.
-80
-60
-40
-20
Magnitude (
dB
)
10-5
10-4
10-3
10-2
10-1
100
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
:Modelo Teórico
:Modelo Estimado Exp 5
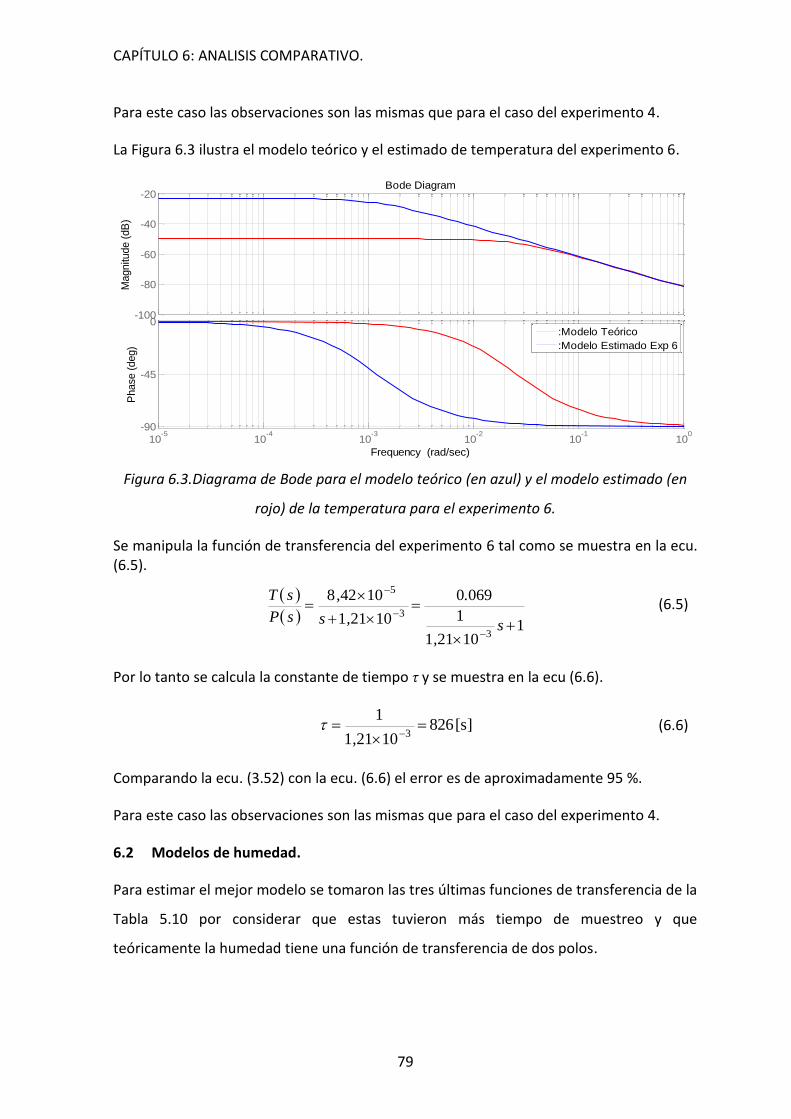
CAPÍTULO 6: ANALISIS COMPARATIVO.
79
Para este caso las observaciones son las mismas que para el caso del experimento 4.
La Figura 6.3 ilustra el modelo teórico y el estimado de temperatura del experimento 6.
Figura 6.3.Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la temperatura para el experimento 6.
Se manipula la función de transferencia del experimento 6 tal como se muestra en la ecu. (6.5).
1
10211
1
0690
10211
10428
3
3
5
s,
.
,s
,
sP
sT (6.5)
Por lo tanto se calcula la constante de tiempo τ y se muestra en la ecu (6.6).
[s] 82610211
13
, (6.6)
Comparando la ecu. (3.52) con la ecu. (6.6) el error es de aproximadamente 95 %.
Para este caso las observaciones son las mismas que para el caso del experimento 4.
6.2 Modelos de humedad.
Para estimar el mejor modelo se tomaron las tres últimas funciones de transferencia de la
Tabla 5.10 por considerar que estas tuvieron más tiempo de muestreo y que
teóricamente la humedad tiene una función de transferencia de dos polos.
-100
-80
-60
-40
-20
Magnitude (
dB
)
Bode Diagram
Frequency (rad/sec)
10-5
10-4
10-3
10-2
10-1
100
-90
-45
0
Phase (
deg)
:Modelo Teórico
:Modelo Estimado Exp 6
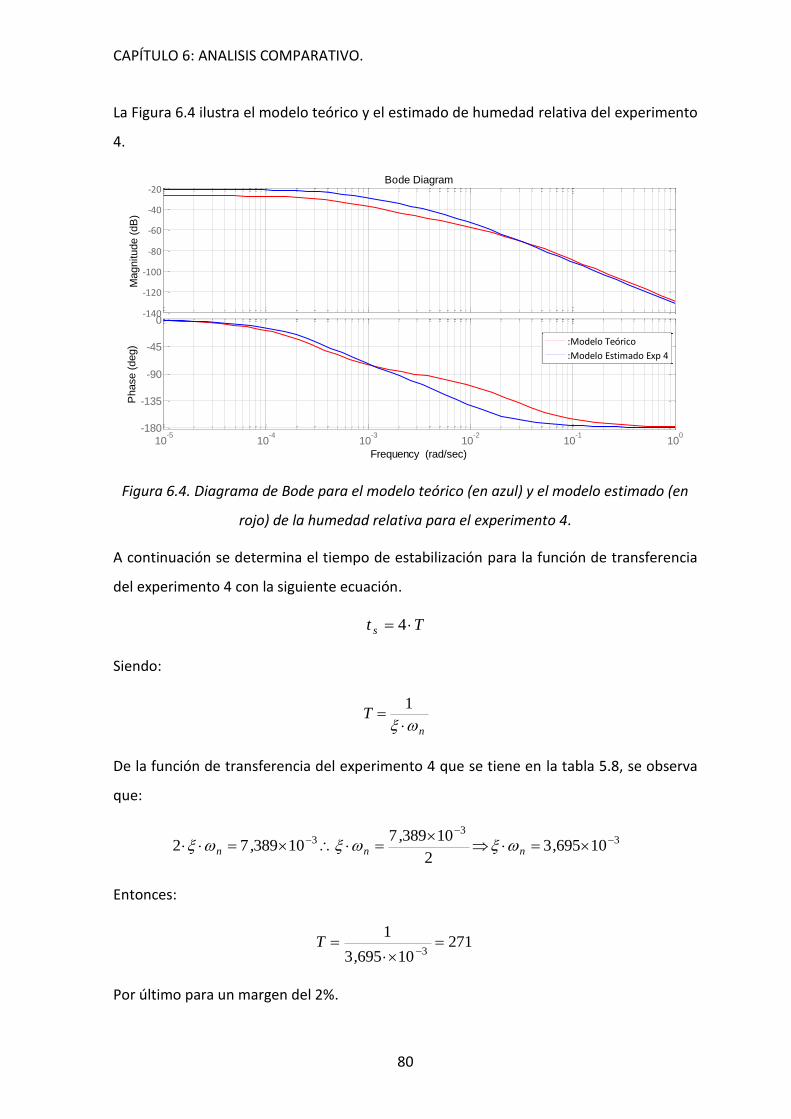
CAPÍTULO 6: ANALISIS COMPARATIVO.
80
La Figura 6.4 ilustra el modelo teórico y el estimado de humedad relativa del experimento
4.
Figura 6.4. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la humedad relativa para el experimento 4.
A continuación se determina el tiempo de estabilización para la función de transferencia
del experimento 4 con la siguiente ecuación.
Tt s 4
Siendo:
n
T
1
De la función de transferencia del experimento 4 que se tiene en la tabla 5.8, se observa
que:
33
3 1069532
1038971038972
,
,, nnn
Entonces:
271106953
13
,T
Por último para un margen del 2%.
-140
-120
-100
-80
-60
-40
-20
Magnitude (
dB
)
10-5
10-4
10-3
10-2
10-1
100
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
:Modelo Teórico
:Modelo Estimado Exp 4
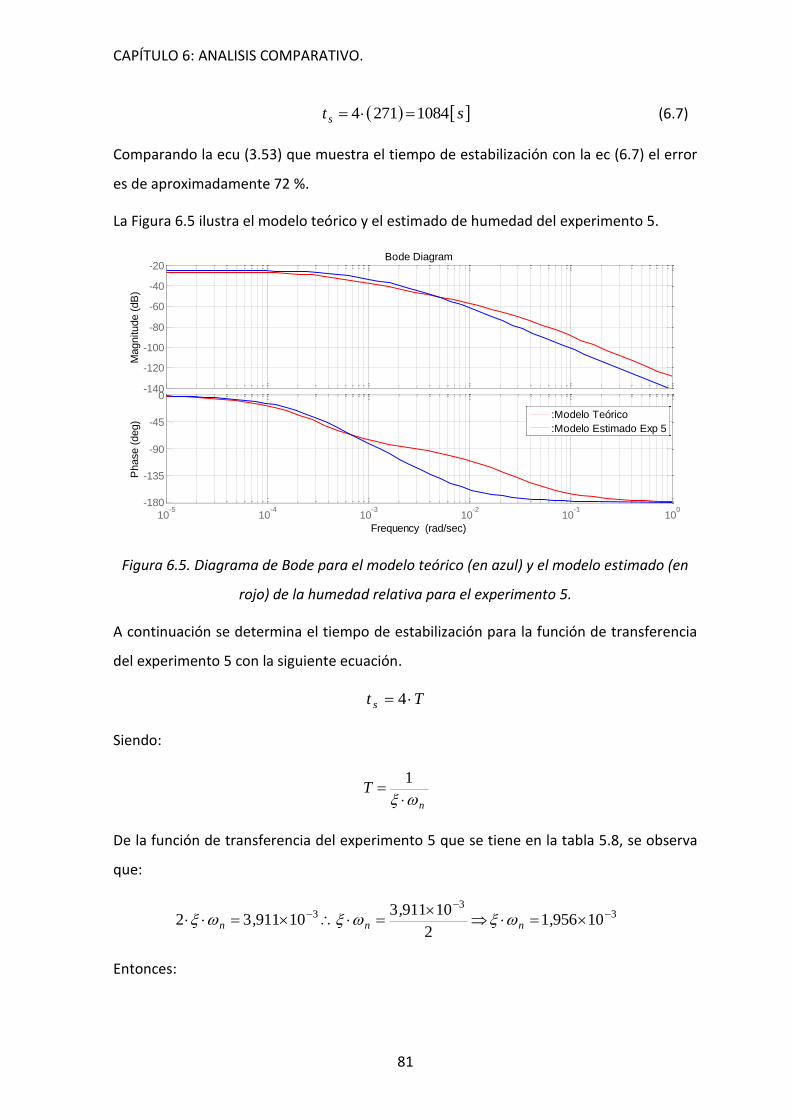
CAPÍTULO 6: ANALISIS COMPARATIVO.
81
st s 10842714 (6.7)
Comparando la ecu (3.53) que muestra el tiempo de estabilización con la ec (6.7) el error
es de aproximadamente 72 %.
La Figura 6.5 ilustra el modelo teórico y el estimado de humedad del experimento 5.
Figura 6.5. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en
rojo) de la humedad relativa para el experimento 5.
A continuación se determina el tiempo de estabilización para la función de transferencia
del experimento 5 con la siguiente ecuación.
Tt s 4
Siendo:
n
T
1
De la función de transferencia del experimento 5 que se tiene en la tabla 5.8, se observa
que:
33
3 1095612
1091131091132
,
,, nnn
Entonces:
-140
-120
-100
-80
-60
-40
-20
Magnitude (
dB
)
10-5
10-4
10-3
10-2
10-1
100
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
:Modelo Teórico
:Modelo Estimado Exp 5
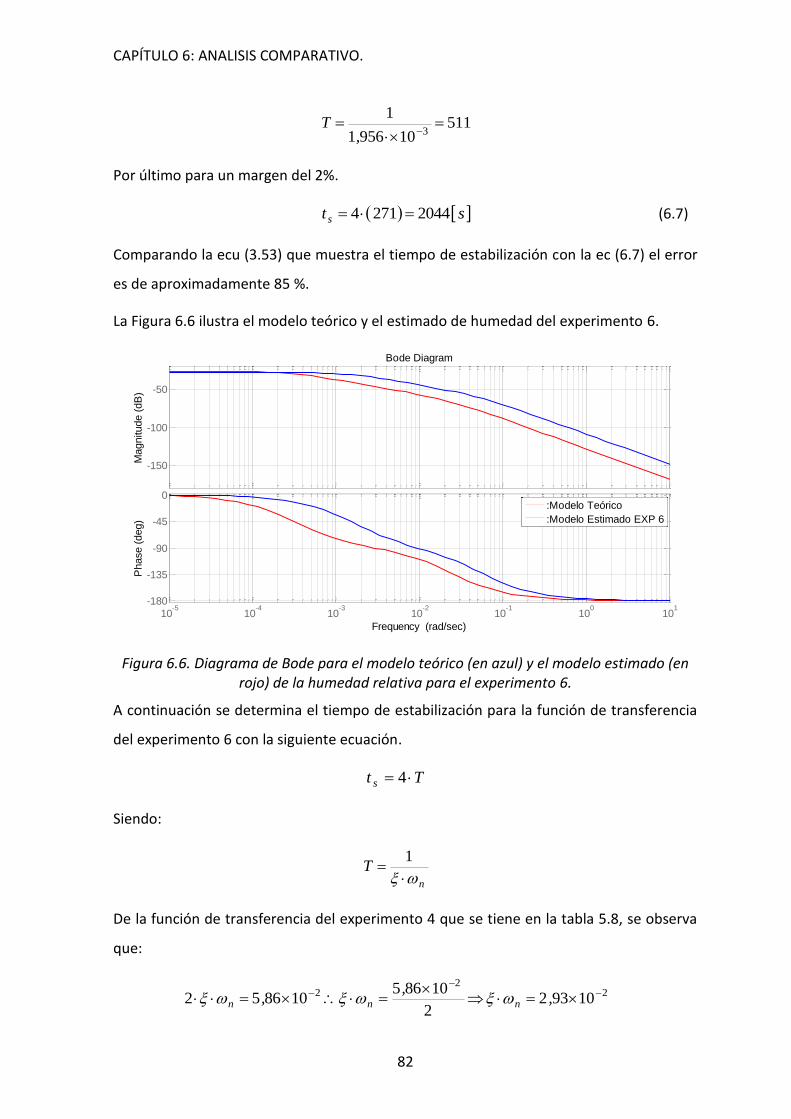
CAPÍTULO 6: ANALISIS COMPARATIVO.
82
511109561
13
,T
Por último para un margen del 2%.
st s 20442714 (6.7)
Comparando la ecu (3.53) que muestra el tiempo de estabilización con la ec (6.7) el error
es de aproximadamente 85 %.
La Figura 6.6 ilustra el modelo teórico y el estimado de humedad del experimento 6.
Figura 6.6. Diagrama de Bode para el modelo teórico (en azul) y el modelo estimado (en rojo) de la humedad relativa para el experimento 6.
A continuación se determina el tiempo de estabilización para la función de transferencia
del experimento 6 con la siguiente ecuación.
Tt s 4
Siendo:
n
T
1
De la función de transferencia del experimento 4 que se tiene en la tabla 5.8, se observa
que:
22
2 109322
10865108652
,
,, nnn
-150
-100
-50
Magnitude (
dB
)
10-5
10-4
10-3
10-2
10-1
100
101
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
:Modelo Teórico
:Modelo Estimado EXP 6
CAPÍTULO 6: ANALISIS COMPARATIVO.
83
Entonces:
3410932
12
,T
Por último para un margen del 2 %.
st s 136344 (6.7)
Comparando la ecu (3.53) que muestra el tiempo de estabilización con la ec (6.7) el error
es de aproximadamente 55 %.
Observando los diagramas de bode de la Figura 6.4, Figura 6.5 y Figura 6.6 se determina
que la mejor aproximación es el modelo del experimento 6.
CAPÍTULO 7: CONCLUSIONES
84
CAPÍTULO 7
7 CONCLUSIONES
En el presente TFM se presenta dos modelos, uno teórico y otro estimado de las variables
temperatura y humedad del invernadero inteligente interior con iluminación artificial que
se encuentra en el Laboratorio de Investigación y Proyectos Final de Carrera de la EUITI, y
que se lo identifica con el nombre de SIGrAL acrónimo de: Smart Indoor Greenhouse with
Artificial Lighting, (por sus siglas en inglés).
Cabe destacar que el título de este TFM no refleja toda la investigación realizada porque
en principio la Puesta en Marcha del Sistema de Medición de Humedad y Temperatura se
lo realizó en un primer momento y se encuentra integrado a este trabajo con el nombre
de Sistema Sensorial de SIGrAL (SS-SIGrAL), por lo que los tutores en conjunto con el
autor de este trabajo reformularon los objetivos iniciales y se desarrollaron nuevos
objetivos divididos en dos partes, una primera, usando el sistema SS-SIGrAL
implementado tomar datos de las variables humedad y temperatura y mediante el
toolbox de identificación de MATLAB estimar un modelo para luego compararlo con el
modelo teórico que aquí también se presenta. La segunda parte queda para un trabajo
posterior que es el desarrollo de un sistema de control optimo que tenga como base el
modelo aquí presentado y corroborado experimentalmente.
Para cumplir con el nuevo objetivo y las tareas impuestas, primero se realizó un análisis
histórico de los invernaderos construidos en exteriores identificando el tipo de estructura
y de cubierta que para proteger el cultivo existen en la actualidad, además se hiso un
análisis comparativo de hectáreas cultivadas en invernaderos de vidrio y de plástico, a
partir de este análisis se observa que los invernaderos de plástico han tenido un gran
impulso por lo económico y fácil que resulta su construcción, segundo se presenta el
estado del arte de los modelos matemáticos y de las variables que se consideran en el
interior de un invernadero, y por último los dos primeros sirvieron para concretizar en la
construcción de SIGrAL.
Con el análisis histórico y enfocado en el estado del arte de los modelos matemáticos y
usando el método deductivo se pudo particularizar para el invernadero SIGrAL,
CAPÍTULO 7: CONCLUSIONES
85
describiendo sus elementos y partes constitutivas, determinándose la ubicación del
sensor de temperatura así como de humedad.
El análisis histórico y el estado del arte también contribuyó a dejar instalados dos
ventiladores uno de ellos trabajando como extractor, con el propósito de dejar listo el
invernadero para el control de las variables temperatura y humedad como segunda etapa
de esta investigación.
En la construcción del invernadero se dejó en la parte inferior un espacio para alojar el
sistema de riego que en este momento está en fase de diseño y en la que el autor de este
TFM también está participando en conjunto con un grupo de dos estudiantes de
pregrado.
Cabe señalar que todos los modelos matemáticos parten de la ley fundamental de la
conservación de la masa y la energía para formular las ecuaciones diferenciales para las
variables más importantes como la temperatura del aire, la humedad la temperatura del
suelo y la concentración de CO2.
Por otro lado gracias al avance de las tecnologías de la información y comunicación se han
propuesto modelos teóricos cuyas ecuaciones diferenciales se resuelven con programas
informáticos y se comparan los resultados obtenidos con los datos experimentales en
dependencia del contexto en el que se realiza los experimentos.
Se han caracterizado y analizado los parámetros que intervienen en los modelos
dinámicos de temperatura y humedad, se toman diferentes autores para formular los
diferentes términos que en estos procesos se dan, llegando a un modelo teórico que se
particulariza para el invernadero SIGrAL.
Como resultado de la caracterización y particularización, el modelo teórico obtenido de
humedad y temperatura resultó un modelo claramente no lineal por lo tanto se lo
linealizó y se determinaron los parámetros tales como área de cultivo, volumen del
interior, coeficiente global de pérdidas de calor por conducción-convección, coeficiente
de evaporación, densidad del aire, la tasa de renovación de aire y el calor especifico del
aire, que sirvieron para obtener la función de transferencia teórica tanto de temperatura
como de humedad. Se hizo un análisis de estas funciones de transferencia
CAPÍTULO 7: CONCLUSIONES
86
determinándose la constante de tiempo para la temperatura y el tiempo de
estabilización para la humedad.
Se diseñó el sistema sensorial SS-SIGrAL usando sensores tanto de temperatura como de
humedad, ambos presentando diferentes características constructivas y de software que
se tomaron en cuenta para el diseño de este sistema. El sensor de temperatura provee de
una señal digital con comunicación I2C, mientras que el sensor de humedad relativa
provee de una señal analógica.
Las señales de los sensores son leídas por el ARDUINO UNO y trasmitidas por éste por el
puerto serial para ser leídas por la interfaz de usuario de la computadora desarrollada en
el programa LabVIEW, el cual presenta en pantalla y en tiempo real las señales,
paralelamente las guarda en un archivo de texto.
Una vez puesto a punto el sistema sensorial se realizaron seis experimentos cada uno con
una señal escalón de potencia por unidad de área diferente y se guardaron los datos en
archivo de texto, para ser importados a MATLAB para su análisis y estimar las funciones
de transferencia a partir de los datos experimentales utilizando la Toolbox de
identificación de parámetros.
Al analizar las señales de los sensores la de humedad era la que más ruido presentaba por
lo que se diseñó un filtro de medias móviles en MATLAB para filtrarla y tener una señal
más pura.
En este TFM se ha presentado numerosas alternativas de funciones de transferencias
estimadas a partir de los datos experimentales resumidas en tres tablas una para la
temperatura en la que se muestran funciones de transferencia de uno y dos polos, otra
para la humedad relativa también con uno y dos polos y por último una tercera con
funciones de transferencia para la humedad relativa de tres polos.
Obtenidas las funciones de transferencia teórica y estimada se compararon para estudiar
la validez del modelo teórico frente al estimado y se llegó a la conclusión de que el
modelo teórico a pesar de que es una primera aproximación hay que mejorarlo
considerando otros factores que intervienen en el proceso dinámico de la temperatura
que se asumieron que no influían en el mismo tales como considerar que la transferencia
de calor del aire al suelo y a los elementos constitutivos de SIGrAL son despreciable, esto
CAPÍTULO 7: CONCLUSIONES
87
puede ser así para un corto periodo de tiempo pero en este caso la temperatura de
estado estable del interior del invernadero estará por más horas que las propuestas
inicialmente, por lo tanto el efecto debe ser considerado.
Trabajos Futuros.
A la vista de los resultados obtenidos en esta investigación se recomienda seguir en la
misma línea para mejorar el modelo teórico y posteriormente en base a este modelo
mejorado plantearse la necesidad de diseñar un control de tipo predictivo para un
determinado cultivo que puede ser tomate cherry u otra hortaliza para aprovechar al
máximo las condiciones en las que se encuentra el invernadero SIGrAL.
También para continuar con la investigación se debe incluir una expresión para el
crecimiento de las plantas como variable a controlar en el modelo de SIGrAL, para ello se
ha pensado, en conjunto el autor con los tutores de este TFM en instalar una cámara de
visión artificial que permita incluir dicha variable en el proceso.
En párrafos anteriores se escribió acerca del sistema de riego, que como trabajo futuro se
debe instalar. Sistema que constará con una bomba, un depósito de agua adecuada para
la situación física que presenta SIGrAL, de sensores de humedad del suelo y el hardware y
software adecuado. Esto implica una nueva variable a considerar en el modelo, que es la
humedad del suelo.
Todos estos trabajos futuros garantizaran que el nombre dado de “invernadero
inteligente interior con iluminación artificial (SIGrAL)” se vea reflejado en la realidad.
BIBLIOGRAFÍA
88
BIBLIOGRAFÍA
Al-Helal, I. & Abdel-Ghany, A., 2011. Energy partition and conversion of solar and
thermal radiation into sensible and thermal radiation into sensible and latent heat in a
greenhouse under arid conditions. Energy and Buildings, Volumen 43, pp. 1740-1747.
Allen, R. G., Pereira, L. S., Raes, D. & Smith, M., 2006. Evapotranspiración del cultivo
Guías para la determinación de los requerimientos de agua de los cultivos, Roma: FAO.
Briceño Medina, L., Ávila Marroquín, M. V. & Jaimez Arellano, R. E., 2011. SIMICROC:
Modelo de Simulación del Microclima de un Invernadero. Agrociencia, pp. 801-813.
Brooker, D., 1967. Mathematical model of psychometric chart. Trans. ASAE, Volumen
10, pp. 558–560.
Castañeda Miranda, R., Ventura Ramos, E., Peniche Vera, R. & Herrera Ruiz, G., 2007.
Ánalisis y simulación del modelo Físico de un invernadero bajo condiciones climáticas de
la región central de Mexico. Agrociencia, pp. 317-335.
Castilla Prados, N., 2007. INVERNADEROS DE PLASTICO Tecnología y manejo. Madrid:
Mundi-Prensa.
Enoch, H. Z., 1999. Greenhouse Ecosystems. Amsterdam: Elsevier.
Enríquez Herrador, R., 2009. Guia de usuario de ARDUINO, Cordoba: I.T.I. Sistemas,
Universidad de Cordaba.
Garzoli, K. V. & Blackwell, J., 1987. An analysis of the nocturnal heat loss from a double
skin plastic greenhouse. Journal of Agricultural Engineering Research, Volumen 36, pp.
75–86.
Gonzalez Real, M. M. & Baille, A., 2005. Tecnología de invernaderos. Cartagena: Área de
Ingeniería Agroforestal. Universidad Politécnica de Cartagena.
Guzmán Cruz, R. y otros, 2010. Algoritmos genéticos para la calibración del modelo
climático de un invernadero. Revista Chapingo Serie Horticultura, pp. 23-30.
Honeywell, 2006. HIH4000 humidity sensor. [En línea] Available at:
http://catalog.sensing.honeywell.com/printfriendly.asp?FAM=humiditymoisture&PN.
[Último acceso: 22 junio 2012].
BIBLIOGRAFÍA
89
Jensen, M. H., 2001. Producción Hidropónica en Invernaderos. RED HIDROPONIA, Julio.
Leal Iga, J. & Pissani Zúñiga, J. F., 2010. Modelo del clima para un invernadero en Marín,
Nuevo Leon, Mexico. s.l., s.n., pp. 64-71.
Leal-Iga, J., Alcorta-García, E. & Rodríguez-Fuentes, H., 2006. Efecto de la variación de la
densidad del aire en la temperatura bajo condiciones de invernadero. Ciencia UANL, pp.
290-297.
López, J. C. y otros, 2008. Incorporación de Tecnología al invernadero mediterráneo.
Barcelona: Cajamar.
Melexis, s.f. Melexis Semiconductors. [En línea] Available at:
http://www.melexis.com/Products-By-Category/Infrared-Thermometer-Sensors-
155.aspx [Último acceso: 2 7 2012].
Ogata, K., 2010. Ingeniería de control moderna. Madrid: PEARSON.
Papadakis, G., Frangoudakis, A. & Kyritsis, S., 1992. mixed, forced and free convection
heat transfer at the greenhouse cover. Journal of Agricultural Engineering Research,
Volumen 51, pp. 191–205.
Pinto Bermúdez, E. & Matía Espada, F., 2010. Fundamentos de control con MATLAB.
Madrid: PEARSON.
Rivera, R. D., 2007. LA TECNOLOGIA DE INVERNADERO EN EL VALLE DEL YAQUI Una
Alternativa para el Desarrollo Regional. Culiacán-Mexico, Universidad Autónoma de
Sinaloa.
Serrano Cermeño, Z., 2005. Construcción de Invernadero. tercera ed. Madrid: Grupo
Mundi-Prensa.
Takakura, T., 2002. Climate Under Cover. Bellingham, WA, U.S.A: Springer.
Thorney, J. H. M. & Jhonson, I. R., 1990. Plant and crop modelling: A mathematical
approach to plant and crop physiology. Oxford and New York: Clarendon Press.
Valera, D. L., Molina, F. D. & Álvarez, A. J., 2008. Ahorro y Eficiencia Energética en
Invernaderos. Madrid: Instituto para la Diversificación y Ahorro de la Energía IDAE.
BIBLIOGRAFÍA
90
Vázquez Espí, M., 1999. Una brevísima historia de la arquitectura solar. [En línea]
Available at: http://habitat.aq.upm.es/boletin/n9/amvaz.html [Último acceso: 30 marzo
2012].
Von Elsner, B. y otros, 2000. Review of structural and functional characteristics of
greenhouse in European Union countris: Part I:Desing requirements. Journal of
Agricultural Engineering Research, 75(1), pp. 1–16.
Wittwer, S. H. & Castilla, N., 1995. Protected cultivation of horticultural crops
worldwide. HortTechnology, pp. 6-23.
Wittwer, S. H. & Castilla, N., 1995. Protected cultivation of horticultural crops
worldwide. HortTechnology, pp. 6-23.
Wu, X.-h. & Lei, Z., 2011. Simulation on temperature and humidity nonlinear controller
of greenhouses. Shenzhen, Guangdong, IEEE Computer Society, pp. 500-503.
Wu, X.-h., Piao, Z.-l., Yang, P. & Fu, L.-s., 2008. Design of the Affine Nonlinear
Temperature-Humidity Controller in Champignon-Drying Machine Using heat and Solar
Energies. New York, IEEE, 345 E 47TH ST, NEW YORK, NY 10017 USA, pp. 1693-1697.
ANEXOS
91
ANEXOS
A. ANEXO 1: Pasos de construcción del invernadero SIGrAL
En las Figuras A.1 y A.2 se puede observar algunos momentos de la secuencia de
construcción de SIGrAL.
Figura A.1. Ensamblando la estructura.
Figura A.2. Instalando los sensores.
ANEXOS
92
La estructura completa de SIGrAL y los diferentes compartimentos se pueden observar
en la Figura A.3.
Figura A.3. Estructura de SIGrAL.
En la Figura A.4 se puede ver el nivel de la tierra en los maceteros y además en la parte
inferior el espacio disponible para el drenaje del agua de riego.
Figura A.4. Altura de la tierra de cultivo.

ANEXOS
93
En la Figura A.5, se observa el espacio disponible para el crecimiento de las plantas,
también se observa la lámpara LED y los bombillos de alógeno en la parte superior,
adicionalmente a los costados se han instalado dos ventiladores uno en la parte inferior
izquierda para ingresar aire y el otro en la parte superior derecha para sacar aire del
espacio de crecimiento.
Figura A.5. Espacio disponible para el crecimiento de las plantas.
Los sensores se colocaron en la parte inferior del volumen de crecimiento en medio de
los maceteros para obtener tanto la temperatura como la humedad cerca de las plantas,
en la Figura A.6 se presenta la posición y en la Figura A.7 un detalle de las conexiones de
los sensores.
Figura A.6. Ubicación de los sensores.
Figura A.7. Conexión de los sensores.
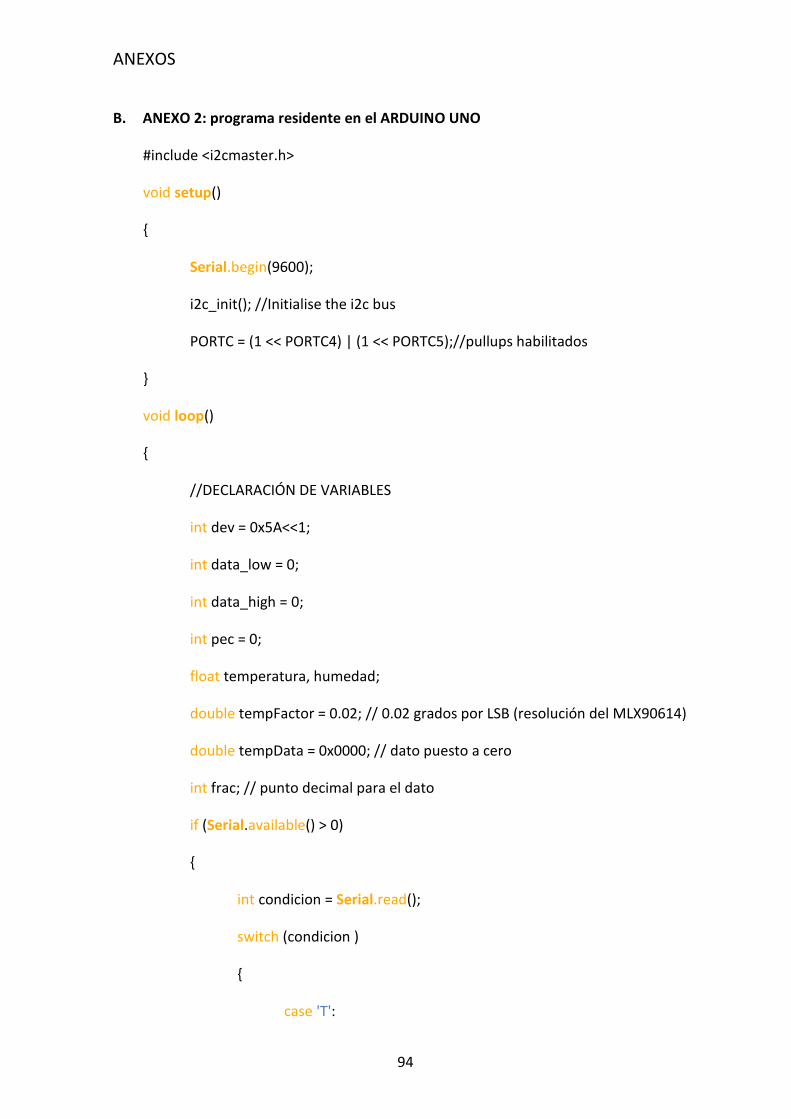
ANEXOS
94
B. ANEXO 2: programa residente en el ARDUINO UNO
#include <i2cmaster.h>
void setup()
{
Serial.begin(9600);
i2c_init(); //Initialise the i2c bus
PORTC = (1 << PORTC4) | (1 << PORTC5);//pullups habilitados
}
void loop()
{
//DECLARACIÓN DE VARIABLES
int dev = 0x5A<<1;
int data_low = 0;
int data_high = 0;
int pec = 0;
float temperatura, humedad;
double tempFactor = 0.02; // 0.02 grados por LSB (resolución del MLX90614)
double tempData = 0x0000; // dato puesto a cero
int frac; // punto decimal para el dato
if (Serial.available() > 0)
{
int condicion = Serial.read();
switch (condicion )
{
case 'T':
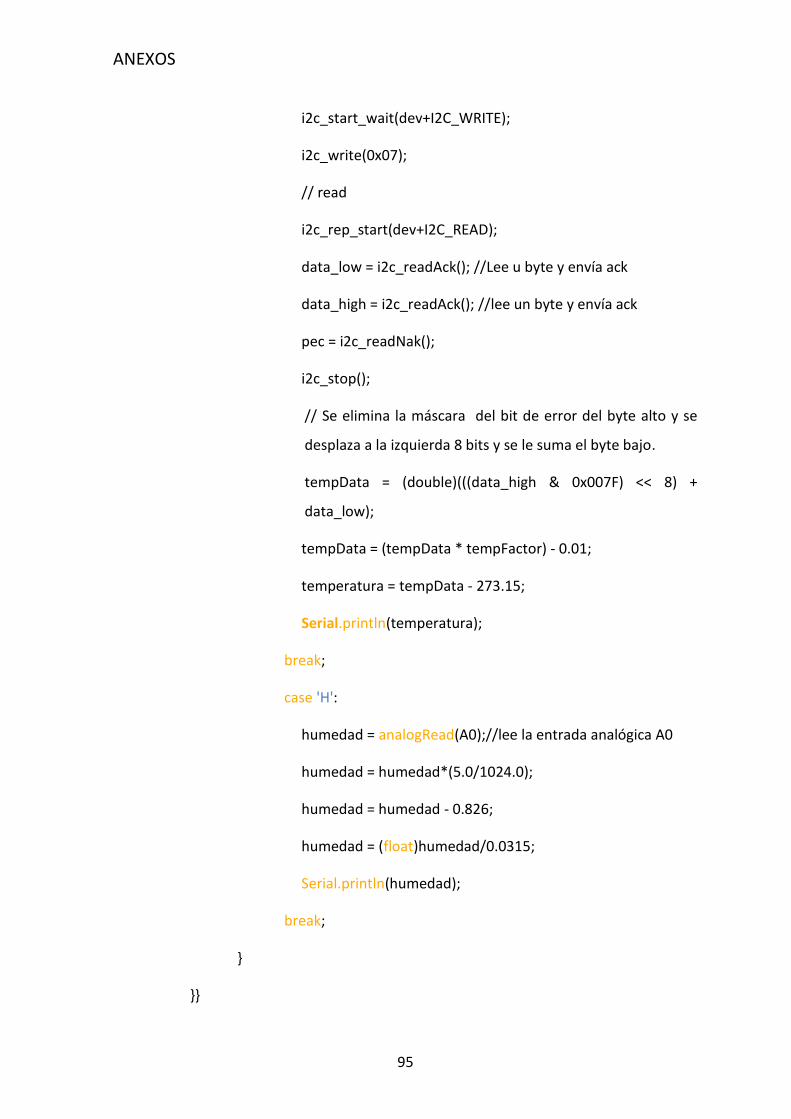
ANEXOS
95
i2c_start_wait(dev+I2C_WRITE);
i2c_write(0x07);
// read
i2c_rep_start(dev+I2C_READ);
data_low = i2c_readAck(); //Lee u byte y envía ack
data_high = i2c_readAck(); //lee un byte y envía ack
pec = i2c_readNak();
i2c_stop();
// Se elimina la máscara del bit de error del byte alto y se
desplaza a la izquierda 8 bits y se le suma el byte bajo.
tempData = (double)(((data_high & 0x007F) << 8) +
data_low);
tempData = (tempData * tempFactor) - 0.01;
temperatura = tempData - 273.15;
Serial.println(temperatura);
break;
case 'H':
humedad = analogRead(A0);//lee la entrada analógica A0
humedad = humedad*(5.0/1024.0);
humedad = humedad - 0.826;
humedad = (float)humedad/0.0315;
Serial.println(humedad);
break;
}
}}
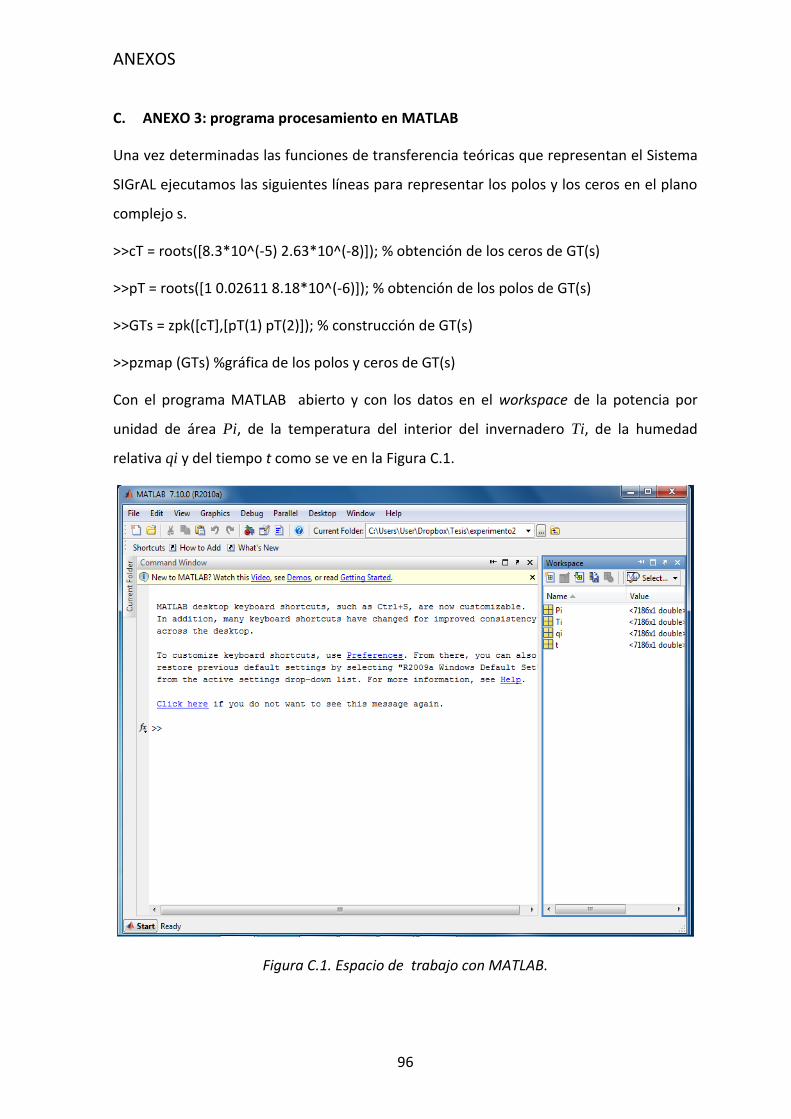
ANEXOS
96
C. ANEXO 3: programa procesamiento en MATLAB
Una vez determinadas las funciones de transferencia teóricas que representan el Sistema
SIGrAL ejecutamos las siguientes líneas para representar los polos y los ceros en el plano
complejo s.
>>cT = roots([8.3*10^(-5) 2.63*10^(-8)]); % obtención de los ceros de GT(s)
>>pT = roots([1 0.02611 8.18*10^(-6)]); % obtención de los polos de GT(s)
>>GTs = zpk([cT],[pT(1) pT(2)]); % construcción de GT(s)
>>pzmap (GTs) %gráfica de los polos y ceros de GT(s)
Con el programa MATLAB abierto y con los datos en el workspace de la potencia por
unidad de área Pi, de la temperatura del interior del invernadero Ti, de la humedad
relativa qi y del tiempo t como se ve en la Figura C.1.
Figura C.1. Espacio de trabajo con MATLAB.
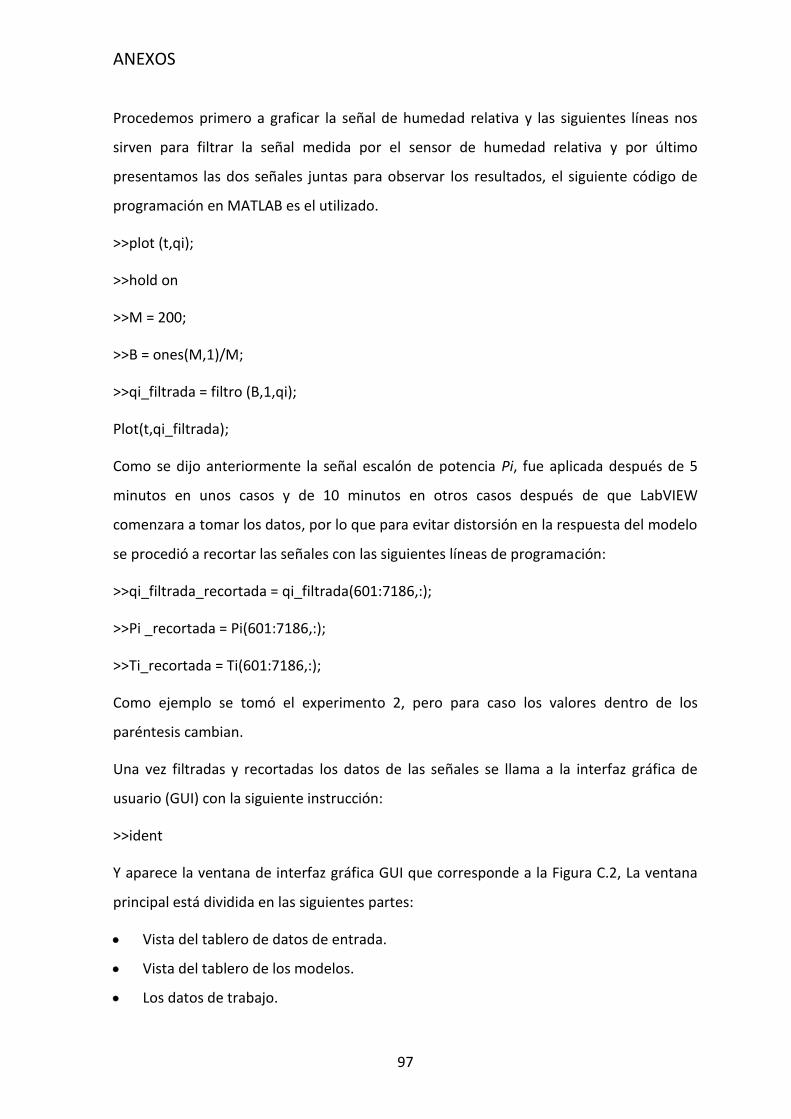
ANEXOS
97
Procedemos primero a graficar la señal de humedad relativa y las siguientes líneas nos
sirven para filtrar la señal medida por el sensor de humedad relativa y por último
presentamos las dos señales juntas para observar los resultados, el siguiente código de
programación en MATLAB es el utilizado.
>>plot (t,qi);
>>hold on
>>M = 200;
>>B = ones(M,1)/M;
>>qi_filtrada = filtro (B,1,qi);
Plot(t,qi_filtrada);
Como se dijo anteriormente la señal escalón de potencia Pi, fue aplicada después de 5
minutos en unos casos y de 10 minutos en otros casos después de que LabVIEW
comenzara a tomar los datos, por lo que para evitar distorsión en la respuesta del modelo
se procedió a recortar las señales con las siguientes líneas de programación:
>>qi_filtrada_recortada = qi_filtrada(601:7186,:);
>>Pi _recortada = Pi(601:7186,:);
>>Ti_recortada = Ti(601:7186,:);
Como ejemplo se tomó el experimento 2, pero para caso los valores dentro de los
paréntesis cambian.
Una vez filtradas y recortadas los datos de las señales se llama a la interfaz gráfica de
usuario (GUI) con la siguiente instrucción:
>>ident
Y aparece la ventana de interfaz gráfica GUI que corresponde a la Figura C.2, La ventana
principal está dividida en las siguientes partes:
Vista del tablero de datos de entrada.
Vista del tablero de los modelos.
Los datos de trabajo.
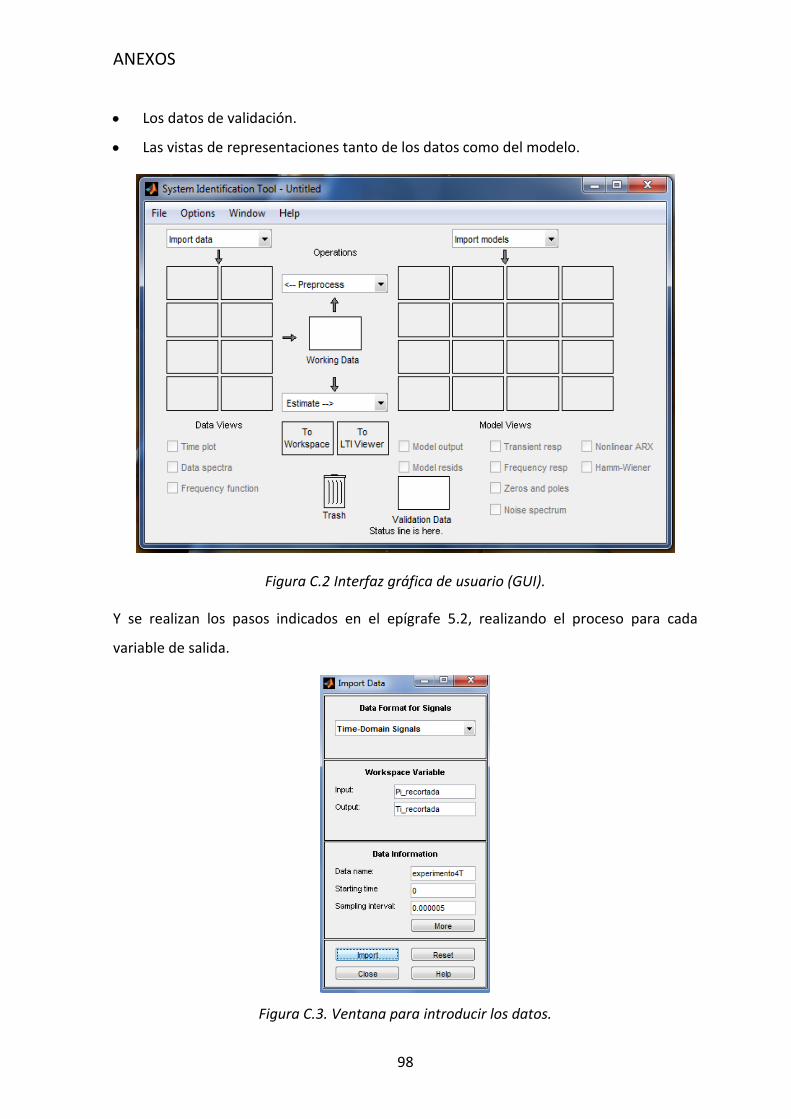
ANEXOS
98
Los datos de validación.
Las vistas de representaciones tanto de los datos como del modelo.
Figura C.2 Interfaz gráfica de usuario (GUI).
Y se realizan los pasos indicados en el epígrafe 5.2, realizando el proceso para cada
variable de salida.
Figura C.3. Ventana para introducir los datos.
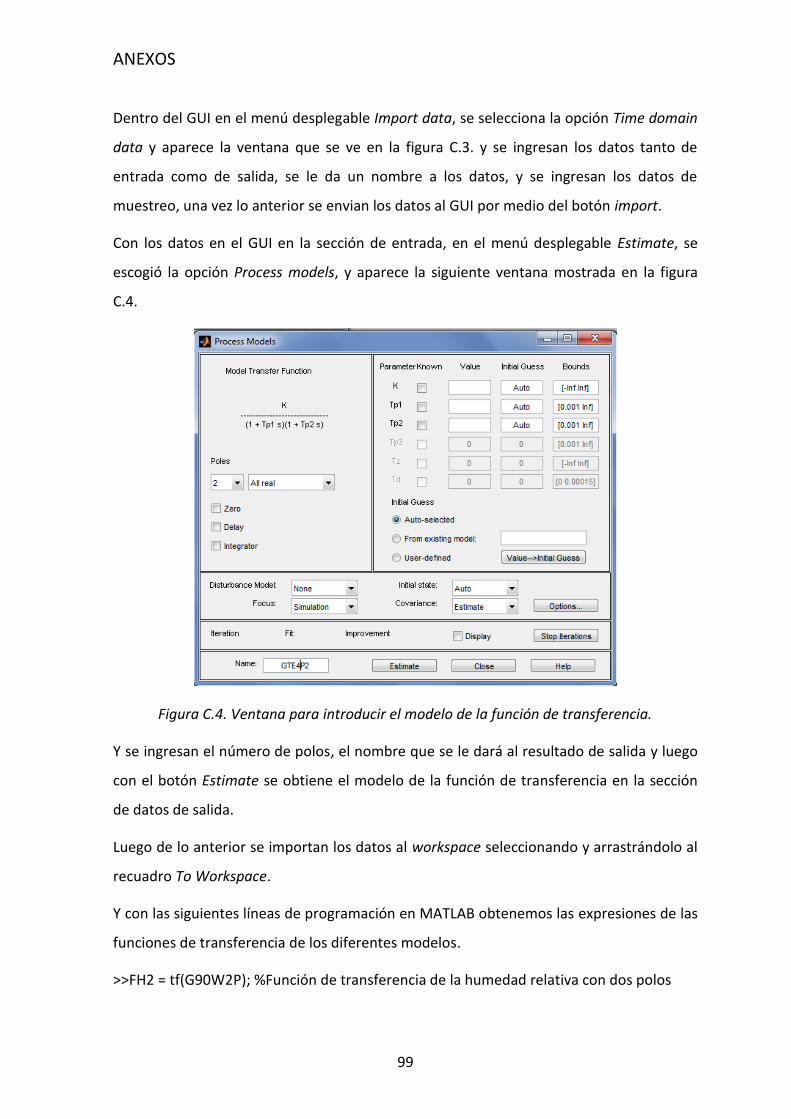
ANEXOS
99
Dentro del GUI en el menú desplegable Import data, se selecciona la opción Time domain
data y aparece la ventana que se ve en la figura C.3. y se ingresan los datos tanto de
entrada como de salida, se le da un nombre a los datos, y se ingresan los datos de
muestreo, una vez lo anterior se envian los datos al GUI por medio del botón import.
Con los datos en el GUI en la sección de entrada, en el menú desplegable Estimate, se
escogió la opción Process models, y aparece la siguiente ventana mostrada en la figura
C.4.
Figura C.4. Ventana para introducir el modelo de la función de transferencia.
Y se ingresan el número de polos, el nombre que se le dará al resultado de salida y luego
con el botón Estimate se obtiene el modelo de la función de transferencia en la sección
de datos de salida.
Luego de lo anterior se importan los datos al workspace seleccionando y arrastrándolo al
recuadro To Workspace.
Y con las siguientes líneas de programación en MATLAB obtenemos las expresiones de las
funciones de transferencia de los diferentes modelos.
>>FH2 = tf(G90W2P); %Función de transferencia de la humedad relativa con dos polos
ANEXOS
100
>>FH3 = tf(G90W3P); %Función de transferencia de la humedad relativa con tres polos
>>FT1 = tf(G90W1P); %Función de transferencia de la temperatura con un polo
>>FT2 = tf(G90W2P); %Función de transferencia de la temperatura con dos polos
Una vez elegidas las funciones de transferencia estimadas que representan el Sistema
SIGrAL ejecutamos las siguientes líneas para representar los polos y los ceros en el plano
complejo s.
>> nE2=2.386*10^(-6); %numerador de la función de transferencia del experimento 2
>> dE2=[1 8.221*10^(-3) 1.427*10^(-5)]; %denominador
>> GTE2s=tf(nE2,dE2) % construcción de GT(s)
>>GTE2s = zpk(GTE2 ); % representación en polos y ceros
>>pzmap (GTs) %gráfica de los polos y ceros de GT(s)
>>axis([-300 1 -1 1])% escalado de ejes
>>sgrid % activación de rejilla en plano s
Para determinar la representación de las funciones de transferencia en el espacio de
estado se escriben las siguientes líneas en MATLAB.
>>TF = [tf([819.7], [1 207.3 7875]); tf([473.2], [1 207.3 7875])]; % se define una matriz de
%funciones de transferencia
>>EE = ss(TF); % se convierten las funciones de transferencia al espacio de estado
Minreal(EE) % con el mínimo número de variables de estado
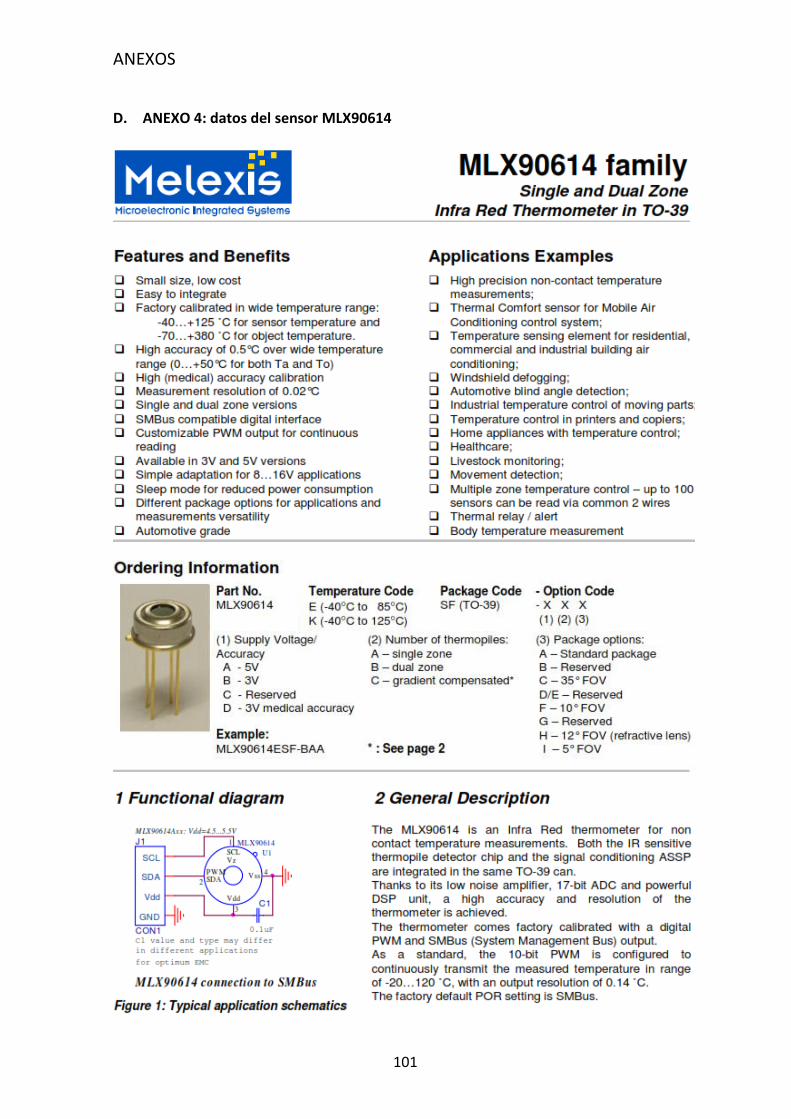
ANEXOS
101
D. ANEXO 4: datos del sensor MLX90614
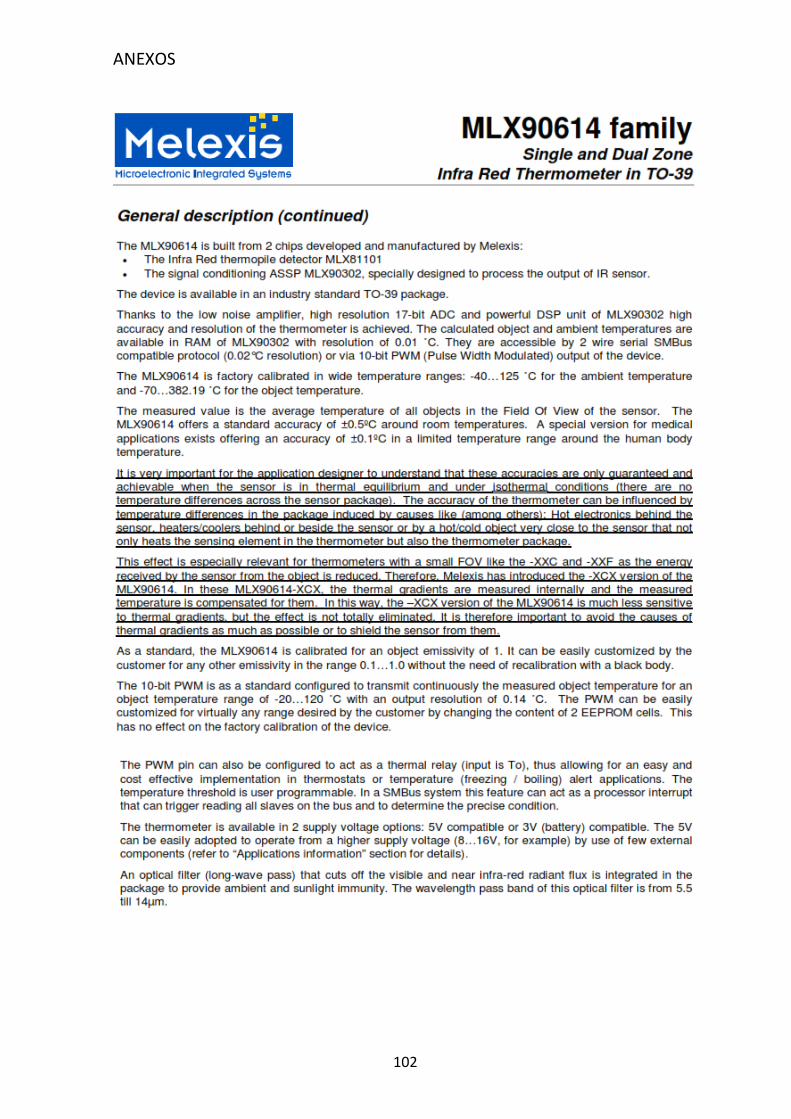
ANEXOS
102
ANEXOS
103
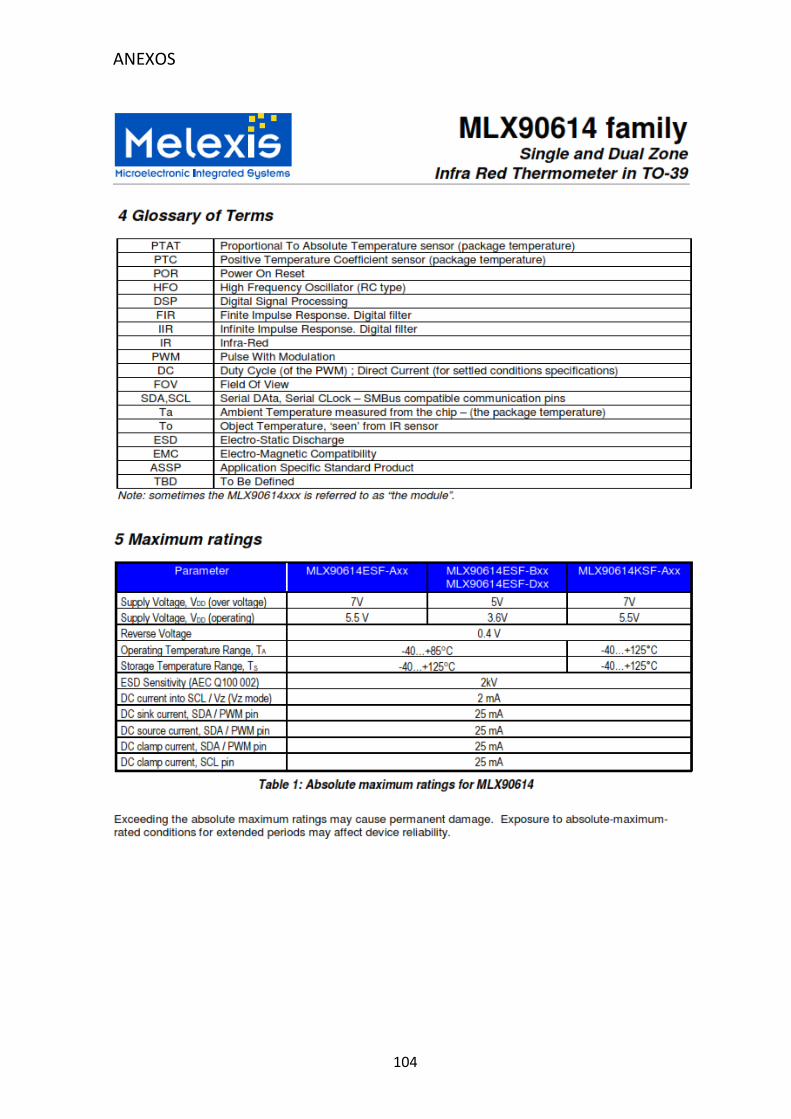
ANEXOS
104
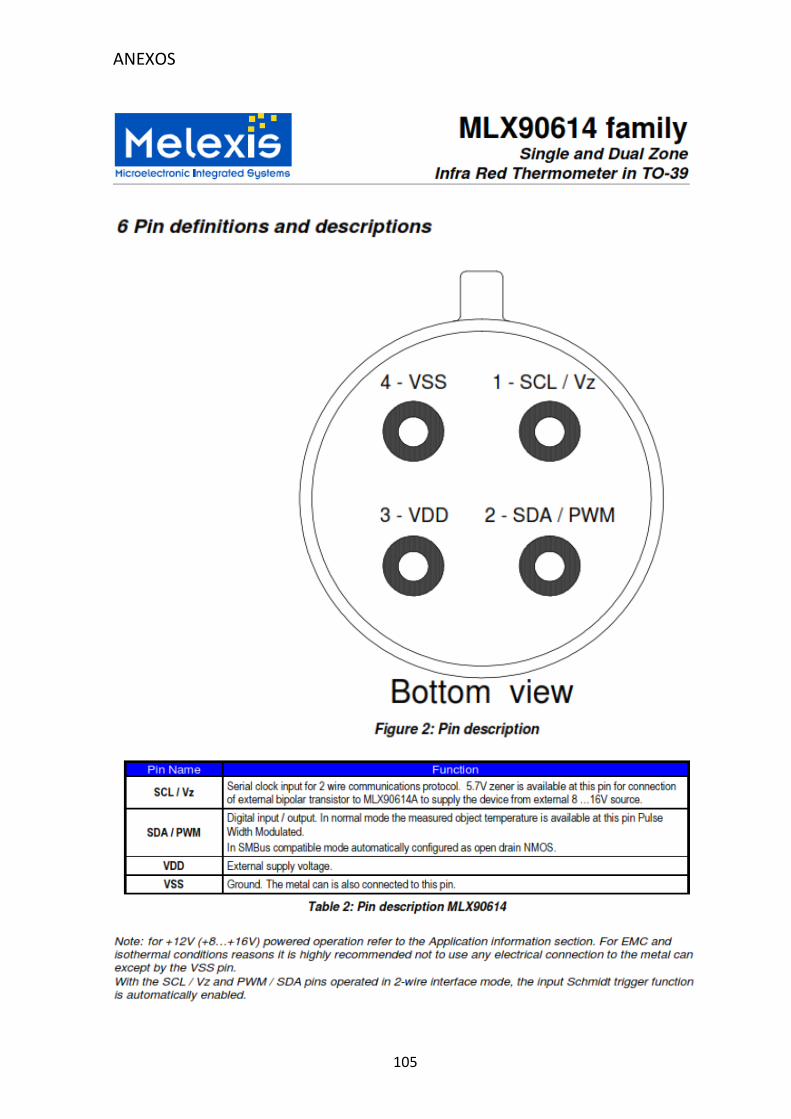
ANEXOS
105
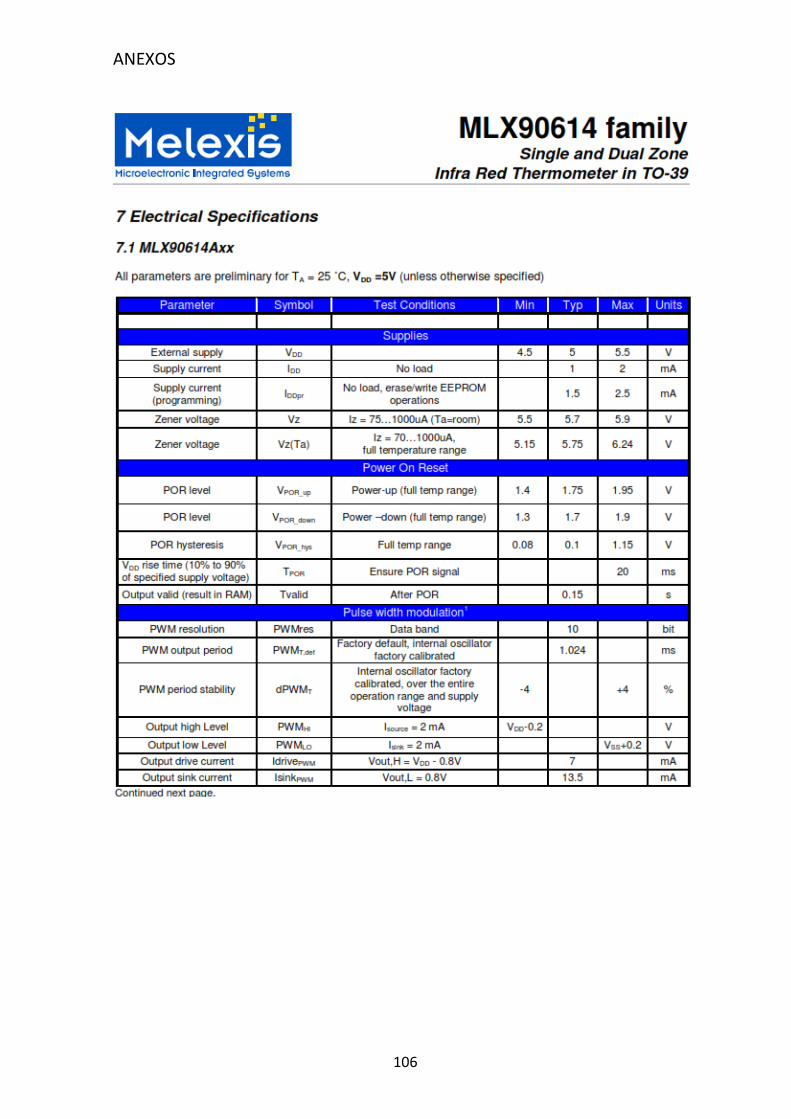
ANEXOS
106
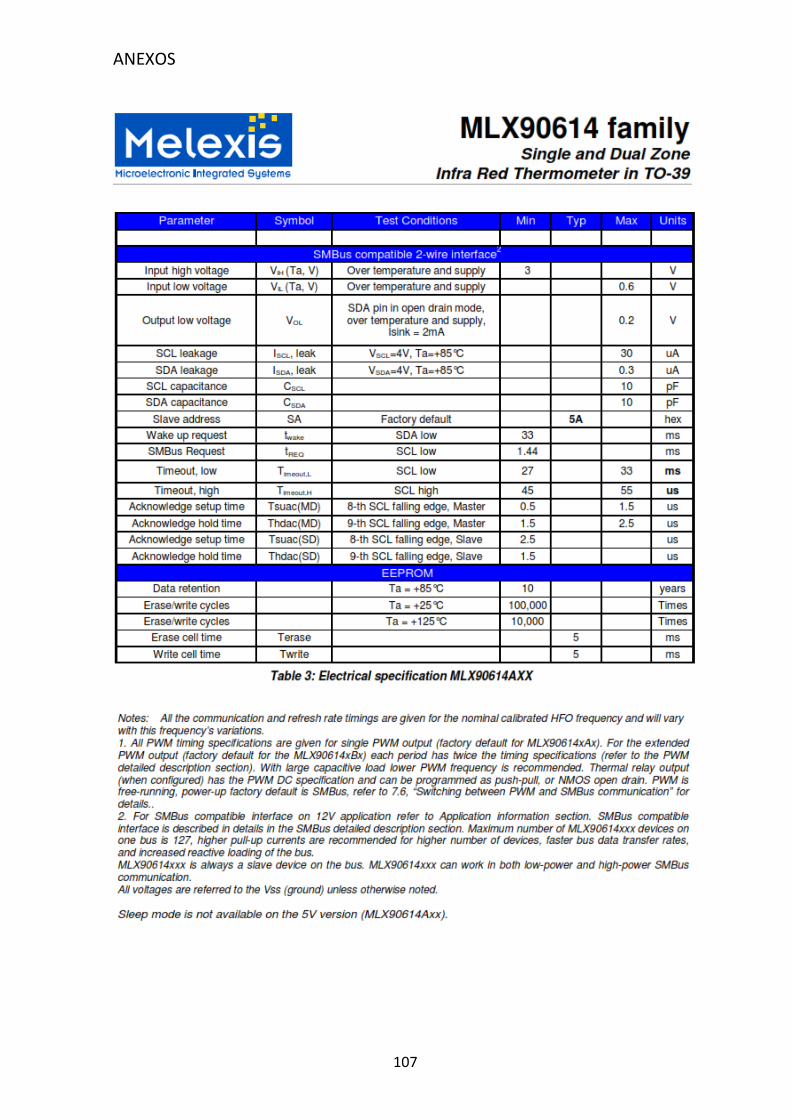
ANEXOS
107
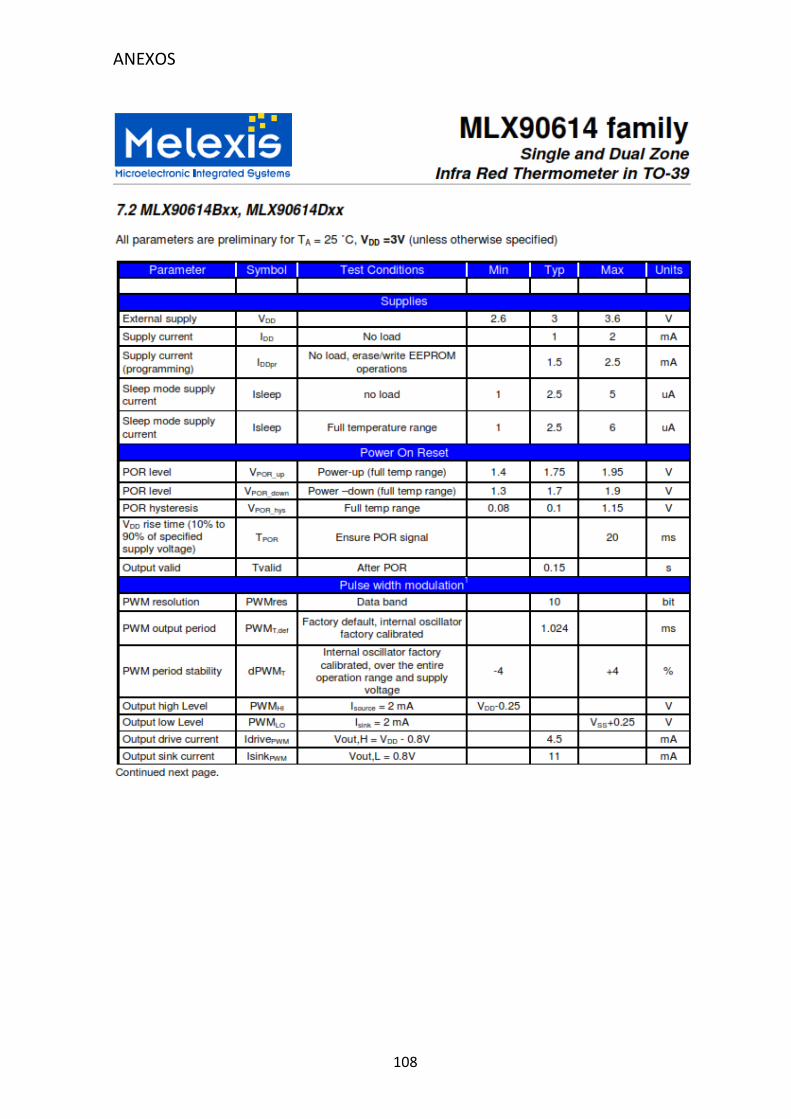
ANEXOS
108
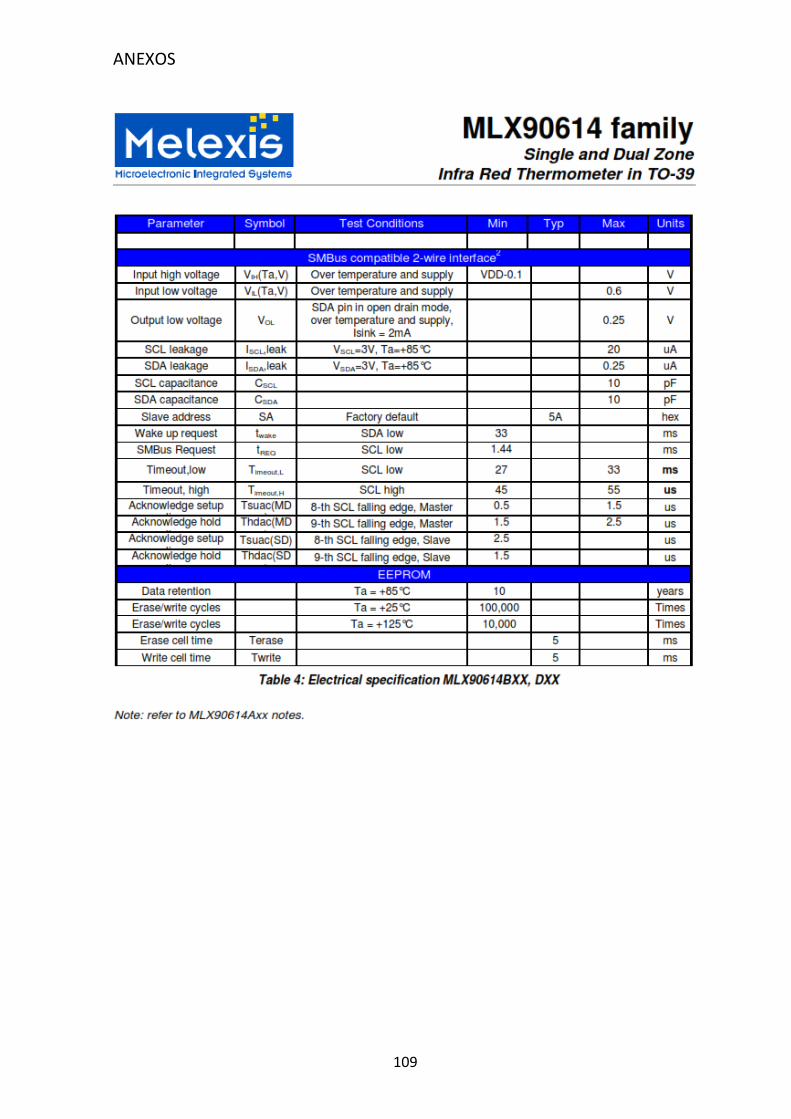
ANEXOS
109
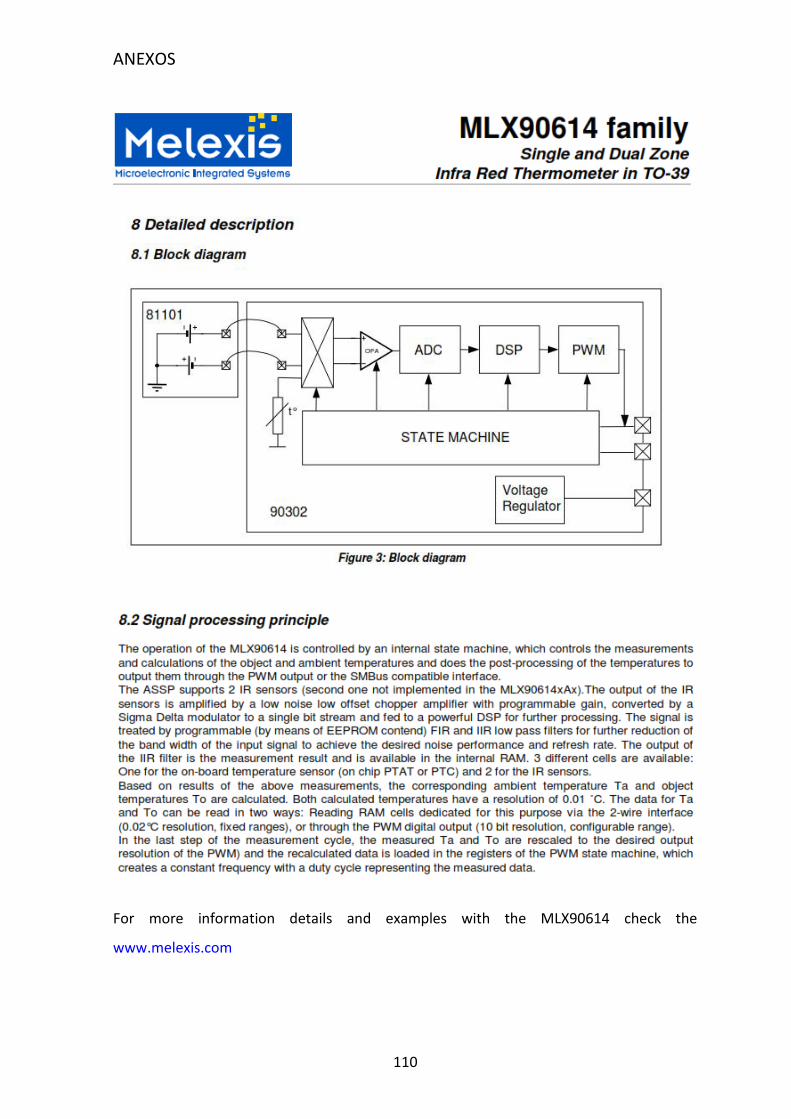
ANEXOS
110
For more information details and examples with the MLX90614 check the
www.melexis.com
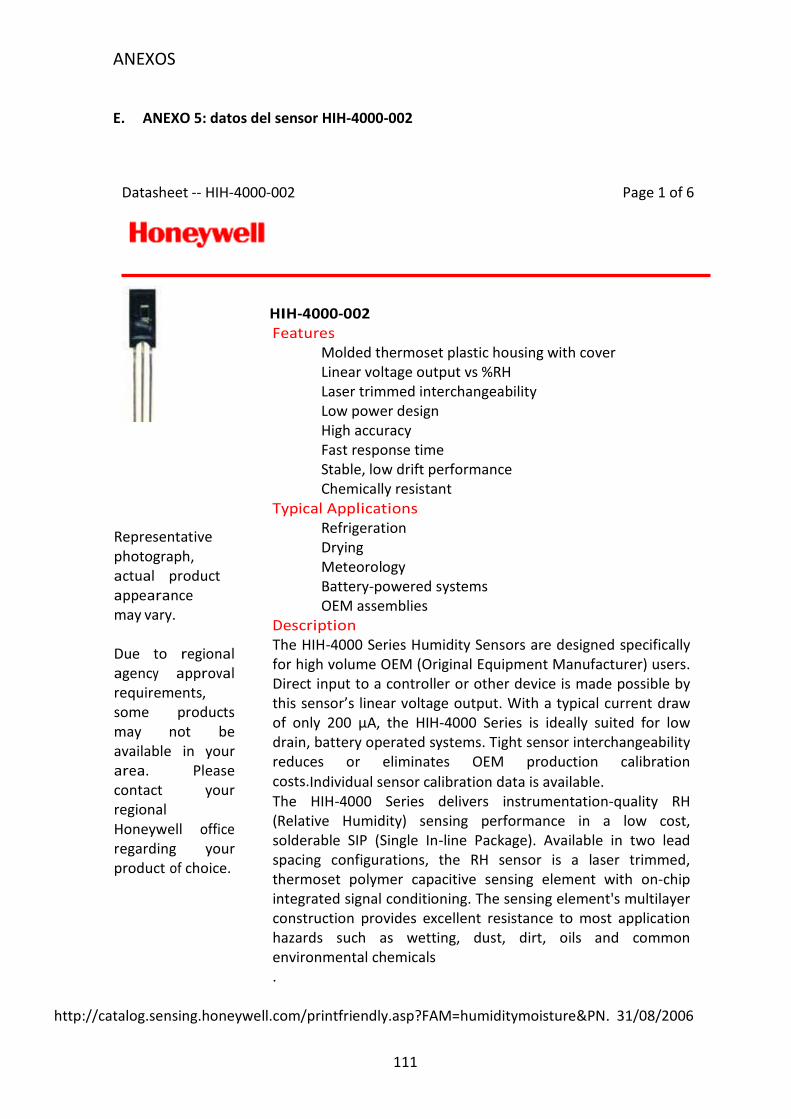
ANEXOS
111
E. ANEXO 5: datos del sensor HIH-4000-002
Datasheet -- HIH-4000-002 Page 1 of 6
Representative photograph, actual product appearance may vary. Due to regional agency approval requirements, some products may not be available in your area. Please contact your regional Honeywell office regarding your product of choice.
HIH-4000-002
Features Molded thermoset plastic housing with cover Linear voltage output vs %RH Laser trimmed interchangeability Low power design High accuracy Fast response time Stable, low drift performance Chemically resistant
Typical Applications Refrigeration Drying Meteorology Battery-powered systems OEM assemblies
Description The HIH-4000 Series Humidity Sensors are designed specifically for high volume OEM (Original Equipment Manufacturer) users. Direct input to a controller or other device is made possible by this sensor’s linear voltage output. With a typical current draw of only 200 µA, the HIH-4000 Series is ideally suited for low drain, battery operated systems. Tight sensor interchangeability reduces or eliminates OEM production calibration costs.Individual sensor calibration data is available.
The HIH-4000 Series delivers instrumentation-quality RH (Relative Humidity) sensing performance in a low cost, solderable SIP (Single In-line Package). Available in two lead spacing configurations, the RH sensor is a laser trimmed, thermoset polymer capacitive sensing element with on-chip integrated signal conditioning. The sensing element's multilayer construction provides excellent resistance to most application hazards such as wetting, dust, dirt, oils and common environmental chemicals .
http://catalog.sensing.honeywell.com/printfriendly.asp?FAM=humiditymoisture&PN. 31/08/2006
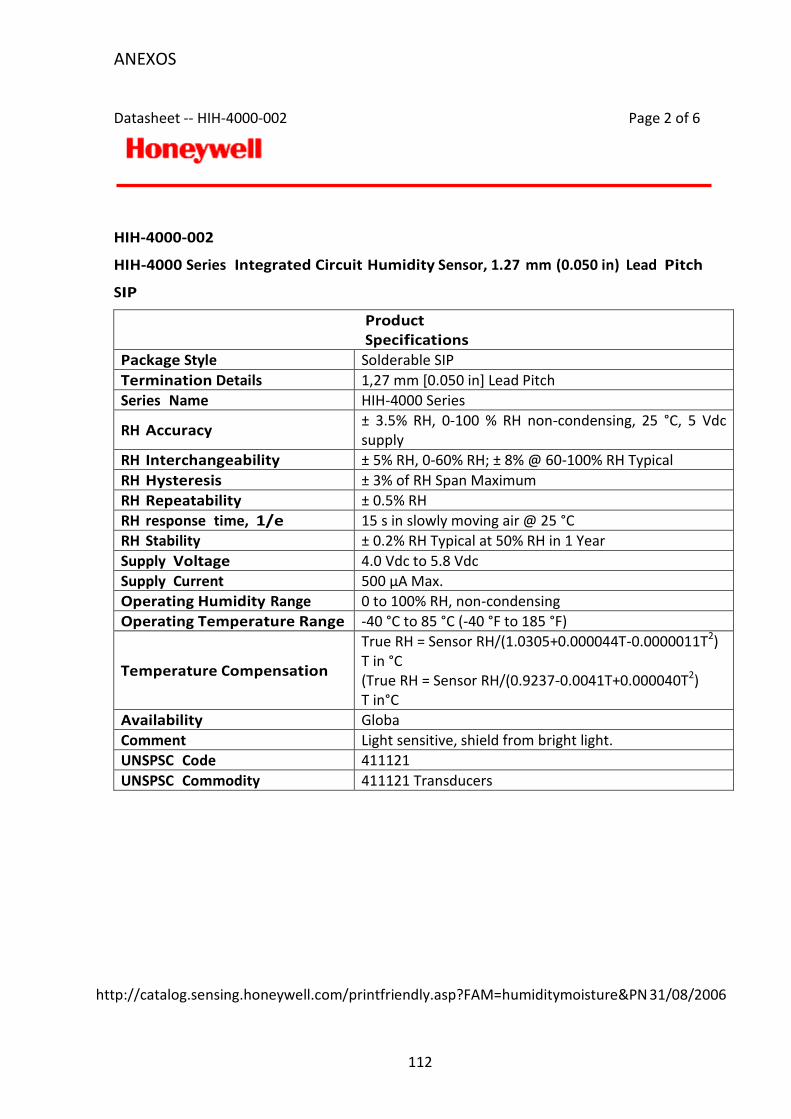
ANEXOS
112
Datasheet -- HIH-4000-002 Page 2 of 6
HIH-4000-002
HIH-4000 Series Integrated Circuit Humidity Sensor, 1.27 mm (0.050 in) Lead Pitch
SIP
Product Specifications
Package Style Solderable SIP
Termination Details 1,27 mm [0.050 in] Lead Pitch
Series Name HIH-4000 Series
RH Accuracy ± 3.5% RH, 0-100 % RH non-condensing, 25 °C, 5 Vdc supply
RH Interchangeability ± 5% RH, 0-60% RH; ± 8% @ 60-100% RH Typical
RH Hysteresis ± 3% of RH Span Maximum
RH Repeatability ± 0.5% RH
RH response time, 1/e 15 s in slowly moving air @ 25 °C
RH Stability ± 0.2% RH Typical at 50% RH in 1 Year
Supply Voltage 4.0 Vdc to 5.8 Vdc
Supply Current 500 µA Max.
Operating Humidity Range 0 to 100% RH, non-condensing
Operating Temperature Range -40 °C to 85 °C (-40 °F to 185 °F)
Temperature Compensation
True RH = Sensor RH/(1.0305+0.000044T-0.0000011T2) T in °C (True RH = Sensor RH/(0.9237-0.0041T+0.000040T2) T in°C
Availability Globa
Comment Light sensitive, shield from bright light.
UNSPSC Code 411121
UNSPSC Commodity 411121 Transducers
http://catalog.sensing.honeywell.com/printfriendly.asp?FAM=humiditymoisture&PN 31/08/2006
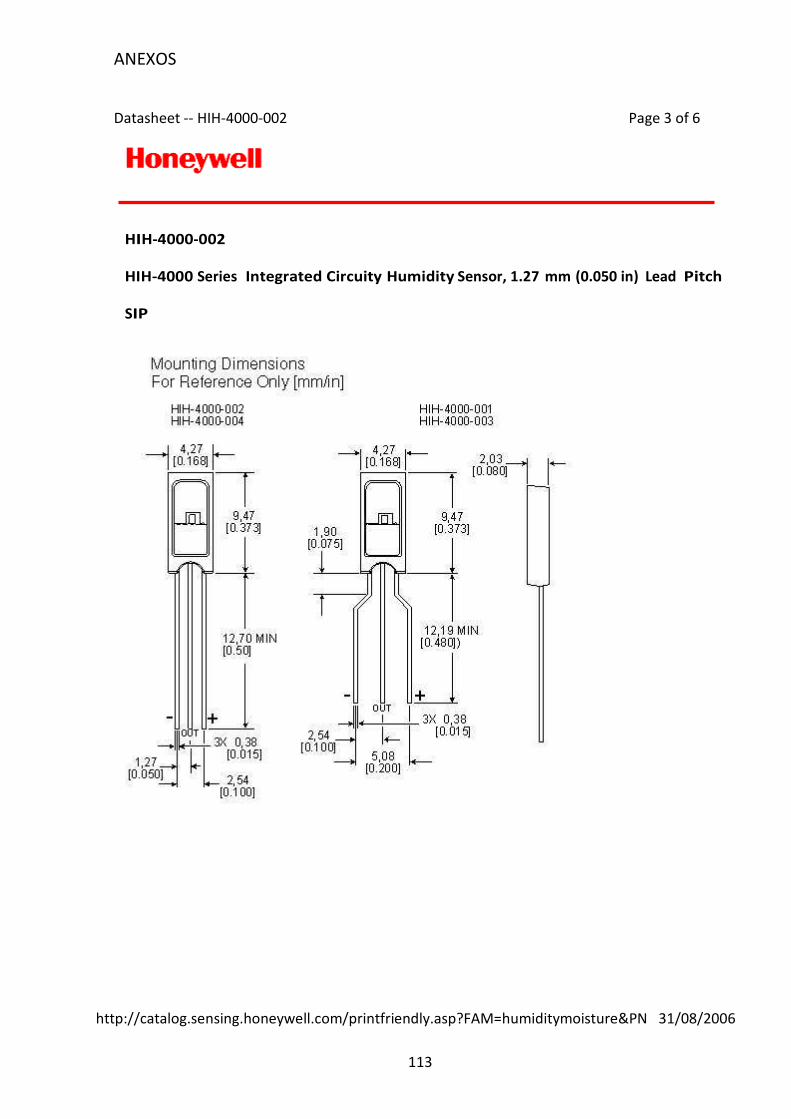
ANEXOS
113
Datasheet -- HIH-4000-002 Page 3 of 6
HIH-4000-002
HIH-4000 Series Integrated Circuity Humidity Sensor, 1.27 mm (0.050 in) Lead Pitch
SIP
http://catalog.sensing.honeywell.com/printfriendly.asp?FAM=humiditymoisture&PN 31/08/2006
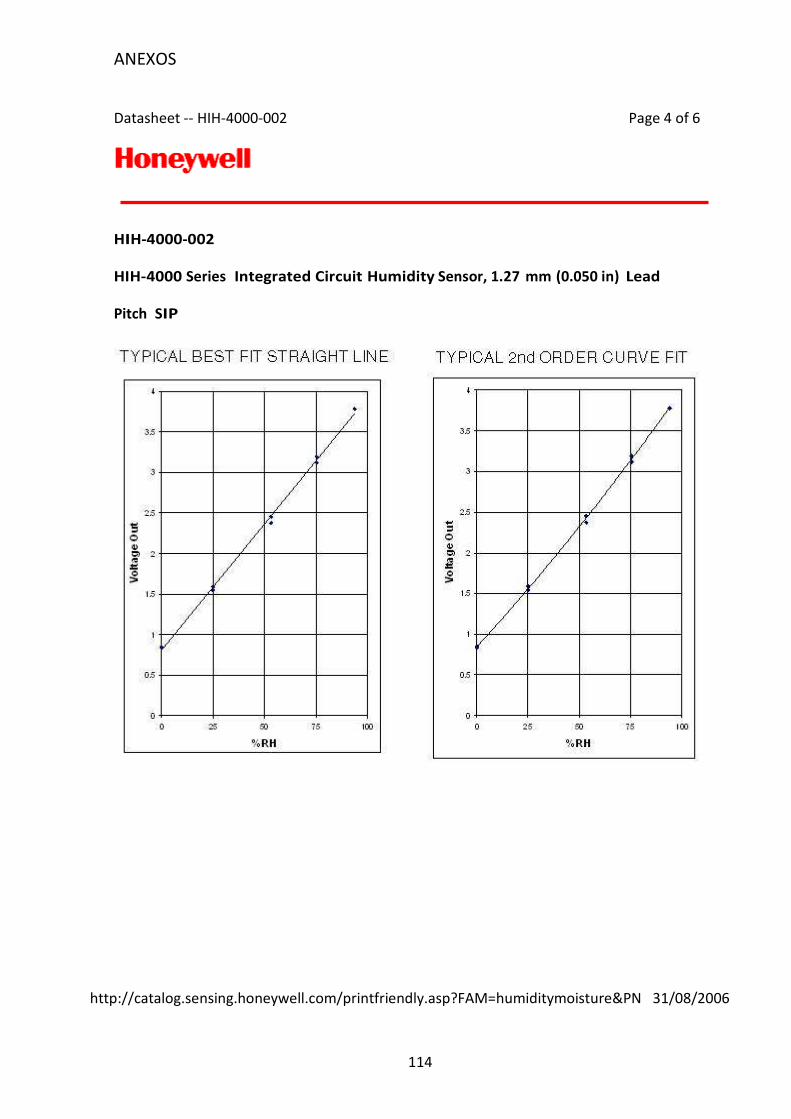
ANEXOS
114
Datasheet -- HIH-4000-002 Page 4 of 6
HIH-4000-002
HIH-4000 Series Integrated Circuit Humidity Sensor, 1.27 mm (0.050 in) Lead
Pitch SIP
http://catalog.sensing.honeywell.com/printfriendly.asp?FAM=humiditymoisture&PN 31/08/2006
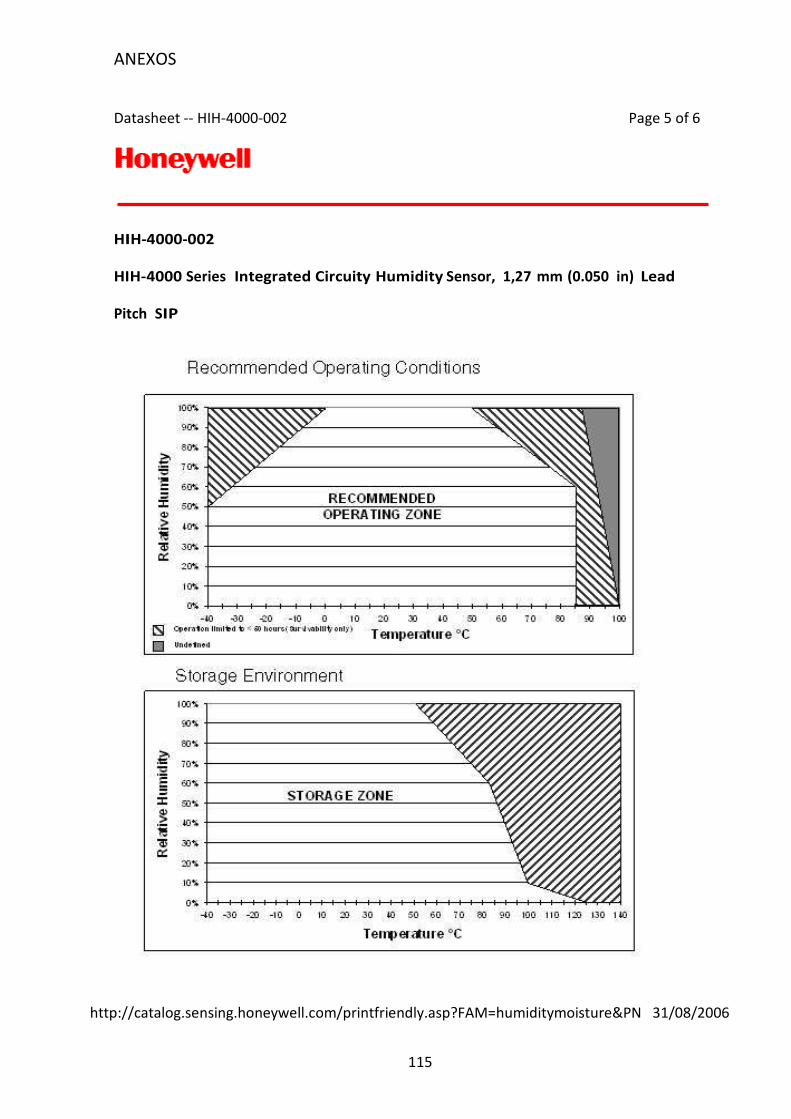
ANEXOS
115
Datasheet -- HIH-4000-002 Page 5 of 6
HIH-4000-002
HIH-4000 Series Integrated Circuity Humidity Sensor, 1,27 mm (0.050 in) Lead
Pitch SIP
http://catalog.sensing.honeywell.com/printfriendly.asp?FAM=humiditymoisture&PN 31/08/2006

ANEXOS
116
Recommended

















