ESTUDIO TOPOGRAFICO PREVIO PARA LA
REALIZACION DE ESTUDIOS Y DISEÑOS DE
DIAGNOSTICO ESTRUCTURAL Y ACTUALIZACION
SÍSMICA DE PUENTES VEHICULARES DE LA AVENIDA
CIUDAD DE QUITO POR AVENIDA DE LOS
COMUNEROS (AV. CALLE 6), AVENIDA CIUDAD DE
QUITO POR AVENIDA CENTENARIO, AVENIDA
CIUDAD DE LIMA (AV. CALLE 19) POR AVENIDA
CIUDAD DE QUITO, AVENIDA CIUDAD DE QUITO
POR AVENIDA JORGE ELICER GAITAN (AV. CALLE 26)
Y AVENIDA CENTENARIO (AV. CALLE 13) POR AV.
BOYACA” GRUPO C –IDU-CMA-SGDU-033-2017.
2019
Mayra Daniela Díaz Romero. Juan Sebastian Martinez Riveros
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS.
INGENIERÍA TOPOGRÁFICA
ESTUDIO TOPOGRAFICO PREVIO PARA LA REALIZACION DE ESTUDIOS Y DISEÑOS DE DIAGNOSTICO ESTRUCTURAL Y ACTUALIZACION SÍSMICA
DE PUENTES VEHICULARES DE LA AVENIDA CIUDAD DE QUITO POR AVENIDA DE LOS COMUNEROS (AV. CALLE 6), AVENIDA CIUDAD DE QUITO
POR AVENIDA CENTENARIO, AVENIDA CIUDAD DE LIMA (AV. CALLE 19) POR AVENIDA CIUDAD DE QUITO, AVENIDA CIUDAD DE QUITO POR
AVENIDA JORGE ELICER GAITAN (AV. CALLE 26) Y AVENIDA CENTENARIO (AV. CALLE 13) POR AV. BOYACA” GRUPO C –IDU-CMA-SGDU-033-2017.
PRESENTADO:
Mayra Daniela Díaz Romero. Código: 20142032103. Juan Sebastian Martinez Riveros. Código: 20142032081.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS. FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES.
PROYECTO CURRICULAR: INGENIERÍA TOPOGRÁFICA. PROYECTO DE GRADO: MODALIDAD PASANTÍA
2019
ESTUDIO TOPOGRAFICO PREVIO PARA LA REALIZACION DE ESTUDIOS Y DISEÑOS DE DIAGNOSTICO ESTRUCTURAL Y ACTUALIZACION SÍSMICA
DE PUENTES VEHICULARES DE LA AVENIDA CIUDAD DE QUITO POR AVENIDA DE LOS COMUNEROS (AV. CALLE 6), AVENIDA CIUDAD DE QUITO
POR AVENIDA CENTENARIO, AVENIDA CIUDAD DE LIMA (AV. CALLE 19) POR AVENIDA CIUDAD DE QUITO, AVENIDA CIUDAD DE QUITO POR
AVENIDA JORGE ELICER GAITAN (AV. CALLE 26) Y AVENIDA CENTENARIO (AV. CALLE 13) POR AV. BOYACA” GRUPO C –IDU-CMA-SGDU-033-2017.
PRESENTADO:
Mayra Daniela Díaz Romero. Código: 20142032103. Juan Sebastian Martinez Riveros. Código: 20142032081.
REVISA:
ING. ROBINSON QUINTANA.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS. FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES.
PROYECTO CURRICULAR: INGENIERÍA TOPOGRÁFICA. PROYECTO DE GRADO: MODALIDAD PASANTÍA
2019
TABLA DE CONTENIDO
1. INTRODUCCION. ..................................................................................................... 7
2. OBJETIVOS. ............................................................................................................. 8
2.1. OBJETIVO GENERAL. ...................................................................................................................... 8
2.2. OBJETIVOS ESPECÍFICOS. ............................................................................................................... 8
3. MARCO TEORICO. ................................................................................................... 9
3.1. POSICIONAMIENTO ESTÁTICO. ...................................................................................................... 9
3.2. LEVANTAMIENTO DE DETALLES. ................................................................................................. 10
3.3 LEVANTAMIENTO DE SITIOS ESPECIALES. ................................................................................... 10
3.3. LEVANTAMIENTO CON ESCÁNER LÁSER. ..................................................................................... 11
3.4. INSPECCIÓN DE REDES CON GPR. ................................................................................................ 11
4. DESARROLLO DE PROCESOS. ................................................................................. 15
4.1 GEODESIA. .......................................................................................................................................... 15
4.1.1 MATERIALIZACIÓN DE VERTICES: ................................................................................................ 15
4.1.2 LOCALIZACIÓN. ............................................................................................................................ 16
4.1.3 ASPECTOS TÉCNICOS. .................................................................................................................. 17
4.1.4 EQUIPOS UTILIZADOS. ................................................................................................................. 17
4.1.5 EQUIPO DE OFICINA. ....................................................................................................................... 17
4.1.6 PROCESO DE POSICIONAMIENTO. .............................................................................................. 17
4.1.7 PROCESOS DE CÁLCULO. ............................................................................................................. 18
4.1.7.1 DATOS DE ORIGEN. .............................................................................................................. 19
4.1.7.2 PUNTOS DE CONTROL HORIZONTAL Y VERTICAL................................................................. 19
4.1.7.3 CALCULOS Y PROCESO DE INFORMACIÓN. .......................................................................... 19
4.1.7.4 POSTPROCESO DE INFORMACIÓN. ...................................................................................... 21
4.1.8 CÁLCULO DE VELOCIDADES. ........................................................................................................ 22
4.2 POLIGONALES CERRADA. .................................................................................................................... 24
4.2.1 TRABAJO DE CAMPO. .................................................................................................................. 25
4.2.2 TRABAJO DE OFICINA. ................................................................................................................. 25
4.2.3 DATOS DE POLIGONALE NQS-AV CALLE 6. .................................................................................. 26
4.3 NIVELACIÓN GEOMÉTRICA. ................................................................................................................ 29
4.4 LEVANTAMIENTO DE DETALLES. ......................................................................................................... 30
4.4.1 LEVANTAMIENTO DE SITIOS ESPECIALES. ................................................................................... 31
4.4.1.1 ESCÁNER LÁSER. .................................................................................................................. 31
4.4.1.2 PREPARACIÓN DEL LEVANTAMIENTO. ................................................................................. 32
4.4.1.3 ESTACIONAMIENTO DEL ESCANER. ..................................................................................... 32
4.4.1.4 DEFINICIÓN DEL ÁREA A ESCANEAR .................................................................................... 33
4.4.1.5 TOMA DE DATOS .................................................................................................................. 33
4.4.1.6 INSPECCIÓN DE REDES CON GPR. ........................................................................................ 33
4.5.6 ESTIMACIÓN DE DIAMETROS MEDIANTE GPR. ........................................................................... 34
4.5.7 ETAPA DE CAMPO. ...................................................................................................................... 35
4.5.7.1 ADQUISICIÓN DE DATOS. ..................................................................................................... 35
4.5.8 HERRAMIENTAS Y EQUIPOS. ....................................................................................................... 37
4.5.9 PARÁMETROS PARA LA ADQUISICIÓN DE DATOS GPR ............................................................... 38
5. RESULTADOS. ........................................................................................................ 39
5.1. GEODESIA. ................................................................................................................................... 39
5.1.1. FORMATOS DE LOCALIZACIÓN. .......................................................................................... 39
5.2. POLIGONAL. ................................................................................................................................. 42
5.3. NIVELACIÓN GEOMETRICA. ......................................................................................................... 44
5.4. ESCANER LASER. .......................................................................................................................... 47
5.5. SALIDAS GRAFICAS. ..................................................................................................................... 58
5.6. RESULTADOS ESCANEO GPR. ....................................................................................................... 61
6. REGISTRO FOTOGRÁFICO. ..................................................................................... 66
7. CONCLUSIONES. .................................................................................................... 68
8. BIBLIOGRAFÍA. ...................................................................................................... 69
LISTA DE ILUSTRACIONES
Ilustración 1. Principios básicos de Georadar. ...................................................................................14
Ilustración 2. Localización de vértices. ...............................................................................................16
Ilustración 3. Triangulación Entre Vértices Geodésicos. ....................................................................21
Ilustración 4. Resumen De Tiempos GPS. ..........................................................................................22
Ilustración 5. Calculo de Velocidades Para GS01. ..............................................................................23
Ilustración 6. Calculo de Velocidades Para GS02. ..............................................................................24
Ilustración 7. Poligonal. ......................................................................................................................28
Ilustración 8. Hoja de cálculo de poligonal. .......................................................................................29
Ilustración 9. Certificación punto 1-BGT IGAC. ..................................................................................30
Ilustración 10. Sección de Georadar Interpretada - Radargrama (Ejemplo).....................................35
Ilustración 11. Profundidades alcanzadas por tecnología GPR. .........................................................38
Ilustración 12. Formato de localización GS-01. ..................................................................................40
Ilustración 13. Coordenadas finales. ..................................................................................................41
Ilustración 14. Incrustación Placa GS-01. ...........................................................................................41
Ilustración 15. Posicionamiento. ........................................................................................................42
Ilustración 16 Calculo de Nivelación Geométrica ..............................................................................47
Ilustración 17 Localización de Escaneos ............................................................................................48
Ilustración 18 Escenas panorámicas del escaneo ..............................................................................55
Ilustración 19 Nube de Puntos LAS puente calle 6 ............................................................................58
Ilustración 20 Salidas graficas CAD Planta General............................................................................60
Ilustración 21 Perfiles Estructurales del segundo nivel puente calle 6 ..............................................61
Ilustración 22 Tubería subterránea captada por el GPR ....................................................................62

LISTA DE TABLAS
Tabla 1. Coordenadas Finales. ...........................................................................................................22
Tabla 2 Velocidades. .........................................................................................................................22
Tabla 4 Coordenadas puntos de amarre ...........................................................................................26
Tabla 5 Coordenadas Ajustadas Poligonal ........................................................................................26
Tabla 6 Datos de cierre angular Poligonal cerrada ...........................................................................27
Tabla 7 Datos de cierre en distancia Poligonal cerrada. ...................................................................27
Tabla 8 Datos de ajuste de nivelación ...............................................................................................30

1. INTRODUCCION.
En el presente documento se describen las actividades que se realizaron en la
ejecución de las labores de topografía planeadas con el fin de dar cumplimiento al
contrato IDU 1436 que tiene como objeto “ Estudios y diseños de diagnóstico
estructural y actualización sísmica de puentes vehiculares de la avenida ciudad de
quito por avenida de los comuneros (Av. Calle 6), avenida ciudad de quito por
avenida centenario, avenida ciudad de lima (Av. Calle 19) por avenida ciudad de
quito, avenida ciudad de quito por avenida Jorge Eliécer Gaitán (Av. calle 26) y
avenida centenario (Av. calle 13) por av. Boyacá” Grupo C –IDU-CMA-SGDU-033-
2017.”
El actual documento ahonda en las labores específicas de topografía para los
puentes ubicados la avenida ciudad de quito por avenida de los comuneros (Av.
Calle 6), en donde se mostrara todas las actividades de topografía que se realizaron
para la ejecución del proyecto, para que la entidades pertinentes a partir de la
topografía base puedan diagnosticar el estado de la estructura y poder ejecutar la
mejor solución de refuerzo para la misma.
Donde se pretende implementar varias tecnologías para dar cabida al
requerimiento del IDU como lo son , escáner laser geodesia y topografía
convencional como poligonales nivelaciones, inspección de redes de GPR
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
8
2. OBJETIVOS.
2.1. OBJETIVO GENERAL.
Describir plenamente las actividades ejecutadas en terreno y oficina para la
realización de los levantamientos topográficos, de redes e información previa que
servirán como insumo base necesario para la determinación del estado actual de
los puentes Avenida ciudad de Quito por la Avenida de los Comuneros (Av. Calle
6), Avenida ciudad de Quito por la Avenida Centenario, Avenida ciudad de Lima (Av.
Calle 19) por la Avenida ciudad de Quito, Avenida ciudad de Quito por Avenida Jorge
Eliecer Gaitán (Av. Calle 26) y Avenida Centenario (Av. Calle 13) por Av. Boyacá.
2.2. OBJETIVOS ESPECÍFICOS.
Utilizar el Sistema de coordenadas de la Red Geodésica del país en fundamento
de las Coordenadas Sistema de Referencia Espacial Magna- Sirgas utilizadas
por Instituto Geográfico Agustín Codazzi (IGAC).
Presentar los resultados de las distintas fases del componente de topografía y
las metodologías implementadas durante su ejecución.
Crear u modelo a partir de puntos obtenidos con LIDAR TERRESTRE.
Realizar orthofoto a partir de imágenes captadas con aeronaves no tripuladas.
Realizar un levantamiento de las redes de servicios públicos existentes en el
área de los puentes con GRP.
Realizar inspección de las redes de acueducto y alcantarillado existentes en el
área de los puentes.
Realizar los productos gráficos finales planos de planta, perfiles longitudinales y
transversales de los puentes.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
9
3. MARCO TEORICO.
3.1. POSICIONAMIENTO ESTÁTICO.
Esta labor se realiza con receptores satelitales de última generación mediante la
utilización del sistema GNSS (Sistema Global de Navegación por Satélite)
compuesto por diferentes constelaciones puestas en funcionamiento pos los
servicios militares de los países pioneros en materia de navegación global. La
constelación principal del sistema GNSS es GPS Navstar.
El Sistema GPS es una tecnología aeroespacial financiada por el gobierno de los
Estados Unidos, con participación de individuos y corporaciones expertos en
comunicaciones. La base del sistema es una constelación de 21 satélites y 3 de
repuesto ubicados en 6 planos. Cada satélite le da 2 veces diariamente la vuelta al
mundo en una órbita fijada aproximadamente a 10.900 millas náuticas. La
información que provee es precisa y se transmite en tiempo real.
El sistema GPS es muy exacto por ser extremadamente resistente a las
inclemencias del tiempo y a las interferencias de las señales de radio en tierra,
gracias a las altas frecuencias de transmisión.
Cada Satélite trasmite dos frecuencias para Posicionamiento denominadas L1 y L2
que son coherentes y moduladas por varias señales a saber: Un código de ruido
pseudo-aleatorio (PRN) llamado código C/A que tiene una frecuencia de 1.025 MHz
y se repite cada milisegundo, a su vez cada una de las portadores L1 y L2 están
moduladas con el código P que es también un (PRN), pero con una frecuencia DIEZ
(10) veces mayor que la del código C/A. Adicionalmente las dos frecuencias
transmiten un mensaje de satélite que le informa al usuario sobre la salud y posición
de cada uno de los satélites (Efemérides).
Midiendo el tiempo que demora en llegar una señal de radio emitida por el satélite
al punto donde está el receptor y conociendo la posición exacta de cada satélite en
el espacio, podemos determinar la distancia que hay del satélite al receptor
aplicando la fórmula d = velocidad de la luz x tiempo; luego, trilaterando con mínimo
cuatro (4) satélites, podemos determinar la posición exacta del receptor en X, Y, Z.
en elipsoide WGS 84.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
10
El posicionamiento fue de tipo estático diferencial con equipos multifrecuencia L1/
L2/L5 de fase portadora completa y código, multi-constelación GPS, GLONASS,
GALILEO, SBAS, BeiDou, etc. Escogidos de doble frecuencia para obtener mayor
precisión en cada uno de los vectores, cumpliendo con la normatividad IGAC y los
tiempos determinados en función de la distancia existente entre los puntos
materializados y las estaciones permanentes de la red MAGNA ECO más cercanas
a la zona del proyecto.
3.2. LEVANTAMIENTO DE DETALLES.
Adicionalmente al escaneo de cada puente, se realiza un levantamiento de detalles
que sirve para alcanzar las zonas no cubiertas por el escáner y como puntos de
comparación y verificación de la calidad de los datos adquiridos, estos datos fueron
tomados con estación total de topografía y procesados con el software Topcon Link
y Gestor de Mediciones.
El resultado de estos levantamientos es una nube de puntos que se incluye al plano
de planta general para realizar las verificaciones necesarias y complementar la
información escasa.
3.3 LEVANTAMIENTO DE SITIOS ESPECIALES.
Como complemento al levantamiento de detalles y escaneo de cada puente, fue
necesario realizar el levantamiento de las zonas cerradas en las bases del puente,
este levantamiento se realizó con estación total de topografía accediendo a estos
espacios por orificios hechos por el contratante.
Desde los puntos de amarre geodésico y los puntos ajustados de la poligonal, se
realiza traslado de coordenadas al interior de los sitios necesarios donde utilizando
el puntero laser de la estación y linternas se identificaron los detalles faltantes para
completar la correcta representación gráfica de la estructura del puente.
Simultáneamente, el profesional encargado de la adquisición de los datos, levantó
a mano alzada un bosquejo de los elementos levantados y comprobó con cinta
métrica las medidas tomadas.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
11
3.3. LEVANTAMIENTO CON ESCÁNER LÁSER.
El escaneado láser describe un método mediante el cual una superficie se muestrea
o escanea usando tecnología láser. Se analiza un entorno u objeto real para tomar
datos sobre su forma y, posiblemente, su apariencia (por ejemplo, el color). Los
datos capturados pueden ser usados más tarde para realizar reconstrucciones
digitales, planos bidimensionales o modelos tridimensionales útiles en una gran
variedad de aplicaciones.
La ventaja del escaneado láser es el hecho de que puede tomar una gran cantidad
de puntos con una alta precisión en un periodo de tiempo relativamente corto. Es
como tomar una fotografía con información de profundidad.
Y al igual que en el caso de la fotografía, los escáneres láser son instrumentos de
línea de vista. Por tanto, es necesario realizar múltiples capturas desde diferentes
estaciones para garantizar una cobertura completa de una estructura.
La tecnología actual de los escáneres láser se puede dividir en dos categorías,
estático y dinámico. Cuando el escáner se mantiene en una posición fija durante la
toma de datos, se llama escaneado láser estático. Las ventajas de este método son
la alta precisión y la alta densidad de puntos. El láser escáner estático suele ser el
método más extendido a la hora de realizar escaneados terrestres.
3.4. INSPECCIÓN DE REDES CON GPR.
El georadar o radar de penetración terrestre (Ground penetrating radar, gpr) es una
técnica geofísica que emplea ondas electromagnéticas de radiofrecuencia del orden
de 10 a 2500 MHz, la técnica es similar en sus principios teóricos al sonar y a la
sísmica de reflexión.
Los fundamentos del radar de penetración terrestre son simples, una antena
transmite ondas de radiofrecuencia a través del subsuelo, cuando llegan a la
interface entre dos materiales con propiedades electromagnéticas diferentes
conductividades, constante dieléctrica, velocidad de propagación, permeabilidad
magnética), parte de ellas se reflejan, mientras otras son refractadas. La unidad de

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
12
control medirá el tiempo transcurrido entre las ondas transmitidas y las reflejadas,
esta sucesión de eventos se repite en intervalos de tiempo muy cortos del orden de
nanosegundos (1 ns=1x10-9 s) mientras la antena está en movimiento y las ondas
reflejadas se representan como trazas dibujadas consecutivamente que
corresponden a las posiciones de la antena sobre la superficie del terreno y forman
un perfil continuo llamado radargrama.
El radar de subsuelo es un método de investigación no destructiva del interior de
medios materiales. Utiliza pulsos electromagnéticos de muy corta duración, 1‐60
nanosegundos (1 ns=10‐9 segundos), en la banda de VHF/UHF (20‐1500 MHz),
que se repiten con una frecuencia de 50 KHz.
Cuando las señales inciden en una interfaz que separa dos zonas caracterizadas
por constantes dieléctricas diferentes se produce la reflexión de parte de la energía
incidente. Esta energía regresa hacia la superficie del medio y es captada por la
antena receptora situada sobre esa superficie. Parte de la energía se refracta en la
discontinuidad y continúa propagándose hacia el interior del medio muestra
esquemáticamente cómo se produce la emisión, propagación, reflexión y registro
posterior de la energía, junto con el radargrama que se obtiene tras este proceso.
Los cambios de parámetros electromagnéticos en el interior de un medio pueden
estar relacionados con variaciones en las propiedades físicas. Puede corresponder,
por ejemplo, con cambios de estrato geológico, con la presencia de oquedades,
objetos o zonas con distinto contenido de agua.
La antena receptora incorpora un circuito electrónico, “demodulador”, conectado al
circuito electrónico de amplificación y recepción; una vez que las reflexiones la
alcanzan, este circuito convierte el pulso electromagnético de alta frecuencia en otro
de banda de audiofrecuencia que es enviado a través de un cable coaxial altamente
apantallado a la unidad central, donde la señal es reconstruida, procesada y
almacenada.
La unidad central está conectada a las antenas y a un sistema de almacenamiento
masivo de datos provisto de una pantalla de visualización en tiempo real donde se
reproduce la señal que se va recibiendo.
Cada señal o grupo de señales que se reciben se registran como una traza. El
operario puede definir el número de señales emitidas cada metro. La posibilidad de
emitir un elevado número de estas señales cada metro permite que, al mover la
antena sobre la superficie del terreno o de la estructura, se obtenga un registro
continuo que refleja la estratigrafía y/o la existencia de anomalías en el subsuelo o

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
13
en el interior de la estructura explorada. Las trazas son señales que muestran la
amplitud de la onda en función del tiempo de propagación (o profundidad si se
conoce la velocidad de la onda en el medio) hasta un tiempo máximo limitado por la
ventana temporal seleccionada. El conjunto de trazas consecutivas proporciona el
registro continuo. Este registro es un diagrama bidimensional que tiene como eje
horizontal la distancia sobre la superficie del medio (posición de la traza recibida) y
como eje vertical el tiempo doble de propagación de la onda (o la profundidad si se
conoce la velocidad de la señal). Puede presentarse como un apilamiento de
amplitudes, pero, para obtener una mejor visualización de las anomalías se suele
asignar un color de una determinada escala a cada rango de amplitud.
El alcance de la técnica aplicada de prospección geofísica (Ground Penetration
Radar – GPR) que permite un estudio no destructivo del interior de medio subsuelo.
El funcionamiento de este método está basado en el fenómeno de propagación de
señales electromagnéticas en medios materiales. El equipo emite pulsos
electromagnéticos de muy corta duración de entre 1 y 60ns en la banda de
frecuencias VHF y UHF de entre 20 y 2000 MHz, que se repiten con una frecuencia
de 50 KHz. Estos pulsos se agrupan en paquetes de ondas compuestos por 1.000
- 15.000 de ellos. Como resultado de esta emisión, la antena genera una onda
electromagnética formada por tres semiperiodos. Esta onda se propaga por el
interior del medio que se desea analizar a una velocidad que depende
principalmente de las propiedades electromagnéticas de los materiales que lo
componen conductividad eléctrica, conductancia dieléctrica y permeabilidad
magnética. La velocidad se puede calcular de forma sencilla en los casos en los que
es posible una aproximación de pequeñas perdidas. Esto ocurre cuando los medios
por los que se propaga la señal son dieléctricos casi perfectos. Bajo estas
condiciones, la velocidad se puede estimar utilizando una ecuación que depende
únicamente de la velocidad de la luz en el vacío (C 30 cm ns) y de la permisividad
dieléctrica relativa del medio.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
14
Ilustración 1. Principios básicos de Georadar.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
15
4. DESARROLLO DE PROCESOS.
En aras del correcto y eficiente cumplimiento al objetivo de la presente pasantía,
se ha estipulado la siguiente lista de actividades las cuales se describen a
continuación.
4.1 GEODESIA.
4.1.1 MATERIALIZACIÓN DE VERTICES:
la información geodésica que se describe a continuación corresponde al
posicionamiento estático diferencial realizado a 02 vértices geodésicos en el distrito
capital; vértices que fueron materializados con el fin de establecer una red
geodésica de precisión para la realización de los levantamientos topográficos
necesarios para dar cumplimiento al objeto del contrato IDU 1436 de 2017 “ Estudios
y diseños de diagnóstico estructural y actualización sísmica de puentes vehiculares
de la avenida ciudad de quito por avenida de los comuneros (Av. Calle 6), avenida
ciudad de quito por avenida centenario, avenida ciudad de lima (Av. Calle 19) por
avenida ciudad de quito, avenida ciudad de quito por avenida Jorge Eliécer Gaitán
(Av. calle 26) y avenida centenario (Av. calle 13) por av. Boyacá” Grupo C –Idu-cma-
sgdu-033-2017.”. en la siguiente información se describen las actividades realizadas
tanto en terreno como en oficina, las metodologías utilizadas para la materialización
y captura de información, los procedimientos y lineamientos seguidos para la
ejecución del cálculo y finalmente los resultados obtenidos.
Se georreferenciaron dos vértices mediante posicionamiento estático diferencial y
se vincularon a la red geodésica nacional en fundamento de las coordenadas
establecidas por el Instituto Geográfico Agustín Codazzi IGAC en el Sistema de
Referencia Espacial Magna- Sirgas, Los puntos materializados tienen identificado
en sus placas los datos del proyecto en cuestión, y la nomenclatura asignada para
cada una de ellas, esta nomenclatura va en un orden numérico precedidos por el
prefijo “GS”.
Para este se utilizó el Sistema de coordenadas de la Red Geodésica del país en
fundamento de las Coordenadas Sistema de Referencia Espacial Magna- Sirgas
utilizadas por Instituto Geográfico Agustín Codazzi (IGAC).

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
16
Además, fue necesaria la obtención de las coordenadas de los dos vértices en el
sistema de coordenadas Planas Cartesianas origen Bogotá y altura geométrica en
dátum buenaventura.
4.1.2 LOCALIZACIÓN.
Los vértices están localizados en la ciudad de Bogotá, ubicados a lo largo de los
espacios públicos y separadores vehiculares del corredor vial de la Av. Carrera 30,
el primero de ellos en la carrera 30 con la calle 6 y el segundo la Avenida Carrera
30 con calle 7.
Ilustración 2. Localización de vértices.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
17
4.1.3 ASPECTOS TÉCNICOS.
Para la ejecución del proyecto se dispuso de un cuerpo de profesionales altamente
calificados y equipos electrónicos de tecnología de punta de tal manera que se
pudiera colectar de manera sistematizada la información.
4.1.4 EQUIPOS UTILIZADOS.
(01) Receptor GNSS geodésico marca CHC modelo X91. Multifrecuencia
L1/L2/L5, rastreo en constelaciones Navstar GPS, GLONASS, BeiDou,
Galileo, SBAS.
(01) Receptor GNSS geodésico marca CHC modelo X90. Multifrecuencia
L1/L2/L5, rastreo en constelaciones Navstar GPS.
4.1.5 EQUIPO DE OFICINA.
Workstations DELL XPS 8500.
Programas de Procesamiento Leica Geo-Office v.8.4
Programas de Procesamiento Topcon Tools v.8.2.3
4.1.6 PROCESO DE POSICIONAMIENTO.
Una vez materializado y/o incrustado los vértices simultáneamente se arman los
equipos en cada uno de los vértices y a la vez se debe colocar un equipo en un
vértice fijo cuyas coordenadas sean conocidas o certificadas, esto cuando se parte
de vértices pasivos o puntos materializados con anterioridad. Para la realización de
la presente red geodésica se utilizaron como puntos de referencia vértices activos

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
18
o estaciones permanentes de rastreo pertenecientes a la red geodésica nacional
BOGT, APBW y ABCC.
Los equipos utilizados deben estar centrados y nivelados correctamente en cada
uno de los vértices nuevos a los cuales se les van a asignar un valor de coordenadas
a partir de la Base, cumpliendo algunas características especiales como:
Distancia entre el equipo base y el equipo móvil (línea base)
Buenas condiciones climáticas y atmosféricas
Que no hallan superficies reflexivas que puedan causar trayectoria múltiple.
Obstrucciones menores a 15°
Sitio seguro y libre de tráfico
Sin transmisiones poderosas (antenas de radio, televisión, etc.)
Que los dos equipos estén completamente capturando información al mismo
tiempo con el fin de obtener tiempos comunes de captura de satélites
Tiempos de grabación simultánea con un mínimo de tiempo respecto a la
longitud entre la base y el rover.
Antes y durante la toma de la información en campo se llenaron los formatos de
descripción del sitio y formato de posicionamiento de campo, anexos a este
documento, que contienen toda la información de la sesión del posicionamiento
Geodésico.
Tiempos de rastreos en función de la distancia a las bases.
Intervalo de grabación cada 5 y 15 segundos para obtener mayor número de
épocas grabadas.
4.1.7 PROCESOS DE CÁLCULO.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
19
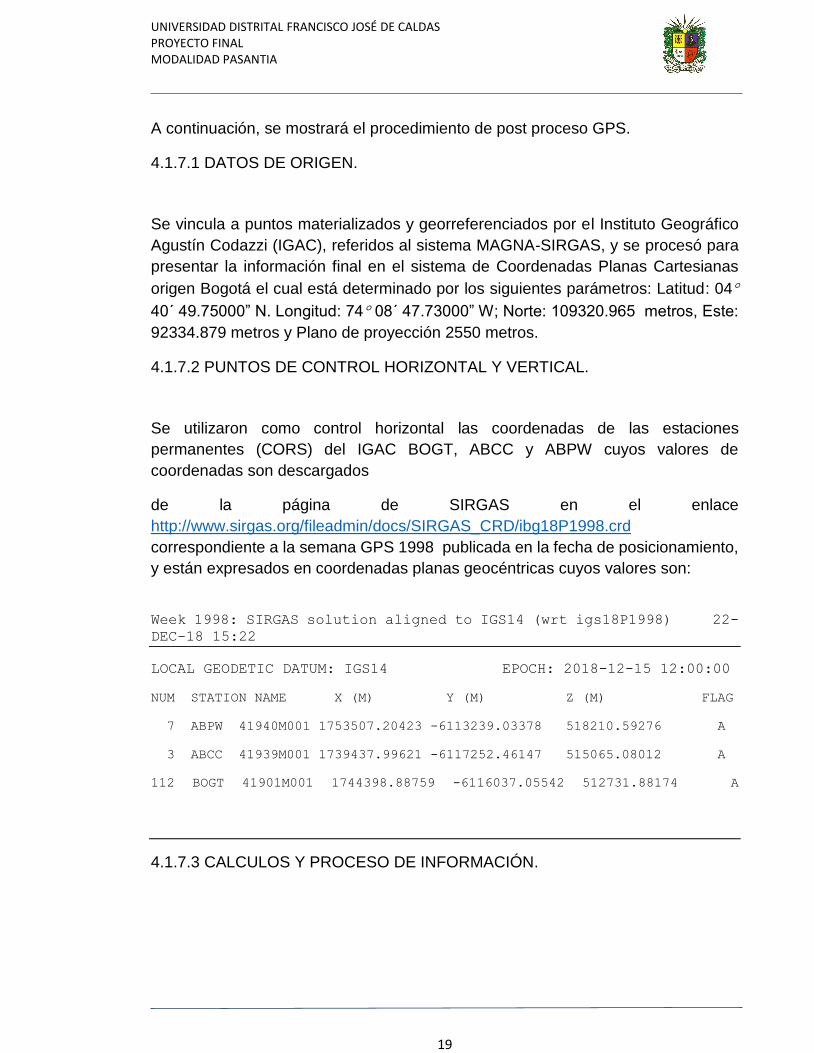
A continuación, se mostrará el procedimiento de post proceso GPS.
4.1.7.1 DATOS DE ORIGEN.
Se vincula a puntos materializados y georreferenciados por el Instituto Geográfico
Agustín Codazzi (IGAC), referidos al sistema MAGNA-SIRGAS, y se procesó para
presentar la información final en el sistema de Coordenadas Planas Cartesianas
origen Bogotá el cual está determinado por los siguientes parámetros: Latitud: 04
40´ 49.75000” N. Longitud: 74 08´ 47.73000” W; Norte: 109320.965 metros, Este:
92334.879 metros y Plano de proyección 2550 metros.
4.1.7.2 PUNTOS DE CONTROL HORIZONTAL Y VERTICAL.
Se utilizaron como control horizontal las coordenadas de las estaciones
permanentes (CORS) del IGAC BOGT, ABCC y ABPW cuyos valores de
coordenadas son descargados
de la página de SIRGAS en el enlace
http://www.sirgas.org/fileadmin/docs/SIRGAS_CRD/ibg18P1998.crd
correspondiente a la semana GPS 1998 publicada en la fecha de posicionamiento,
y están expresados en coordenadas planas geocéntricas cuyos valores son:
Week 1998: SIRGAS solution aligned to IGS14 (wrt igs18P1998) 22-
DEC-18 15:22
LOCAL GEODETIC DATUM: IGS14 EPOCH: 2018-12-15 12:00:00
NUM STATION NAME X (M) Y (M) Z (M) FLAG
7 ABPW 41940M001 1753507.20423 -6113239.03378 518210.59276 A
3 ABCC 41939M001 1739437.99621 -6117252.46147 515065.08012 A
112 BOGT 41901M001 1744398.88759 -6116037.05542 512731.88174 A
4.1.7.3 CALCULOS Y PROCESO DE INFORMACIÓN.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
20
Para el cálculo se empleó el software Leica Geo Office 8.3, utilizando el siguiente
flujo de trabajo:
Descarga de datos crudos de los receptores GPS mediante el software nativo
“CHC” licenciado.
Exportación de los datos crudos en formato CHC a formato RINEX.
Creación del proyecto e Importación de los datos RINEX en el software Leica
Geo Office 8.3.
Descarga e importación de efemérides precisas de la web
ftp://cddis.gsfc.nasa.gov/gnss/products/2002/igr20024.sp3.Z para las la
semana de posicionamiento correspondiente a la 2002 en formato SP3.
Definición de los puntos de control y rovers, definición de los parámetros de
cada una de las antenas dentro del software.
Revisión de información registrada, alturas de las antenas, intervalo de
registro, etc.
Procesamiento de los vectores calculados para la red.
Revisión preliminar del reporte de procesamiento. Análisis de satélites y ruido
en la señal.
Ajuste de los triángulos formados por los receptores simultáneos.
Calculo del circuito de cierre. (Loop Misclosure)
Calculo por doble comparación y ajuste de la triangulación.
Transformación de coordenadas Geodésicas WGS84 a planas cartesianas
Nivelación geométrica a los vértices
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
21
Reporte final de coordenadas.
Formatos de Acceso para cada vértice nuevo.
4.1.7.4 POSTPROCESO DE INFORMACIÓN.
Para el cálculo de los vértices geodésicos se utilizaron cuatro bases de rastreo
permanente correspondientes a la red geodésica Magna Sirgas del IGAC, las
cuales fueron ABCC,
BOGT y ABPW, de las cuales se ligó y se calcularon los tiempos a partir de estas
bases. Una vez calculados estos puntos se procedió a realizar el ajuste entre la
mayoría de ellos teniendo en cuenta los tiempos de rastreo que tenían en común y
así generar su triangulación.
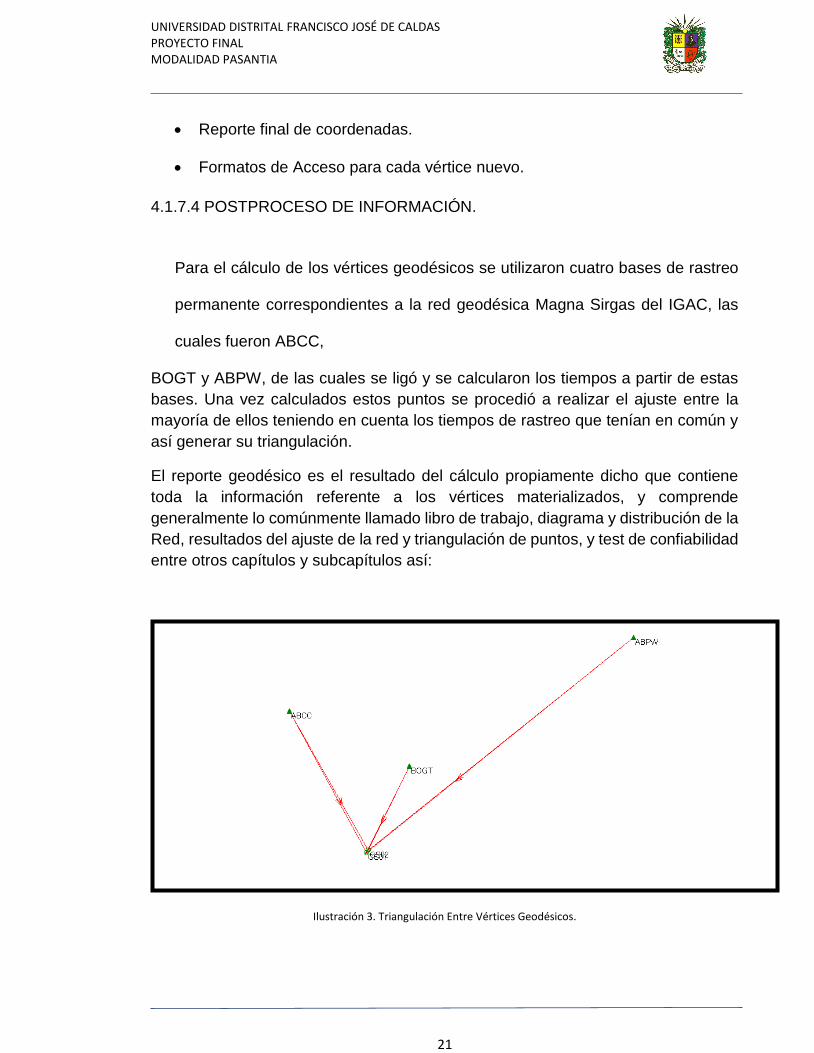
El reporte geodésico es el resultado del cálculo propiamente dicho que contiene
toda la información referente a los vértices materializados, y comprende
generalmente lo comúnmente llamado libro de trabajo, diagrama y distribución de la
Red, resultados del ajuste de la red y triangulación de puntos, y test de confiabilidad
entre otros capítulos y subcapítulos así:
Ilustración 3. Triangulación Entre Vértices Geodésicos.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
22
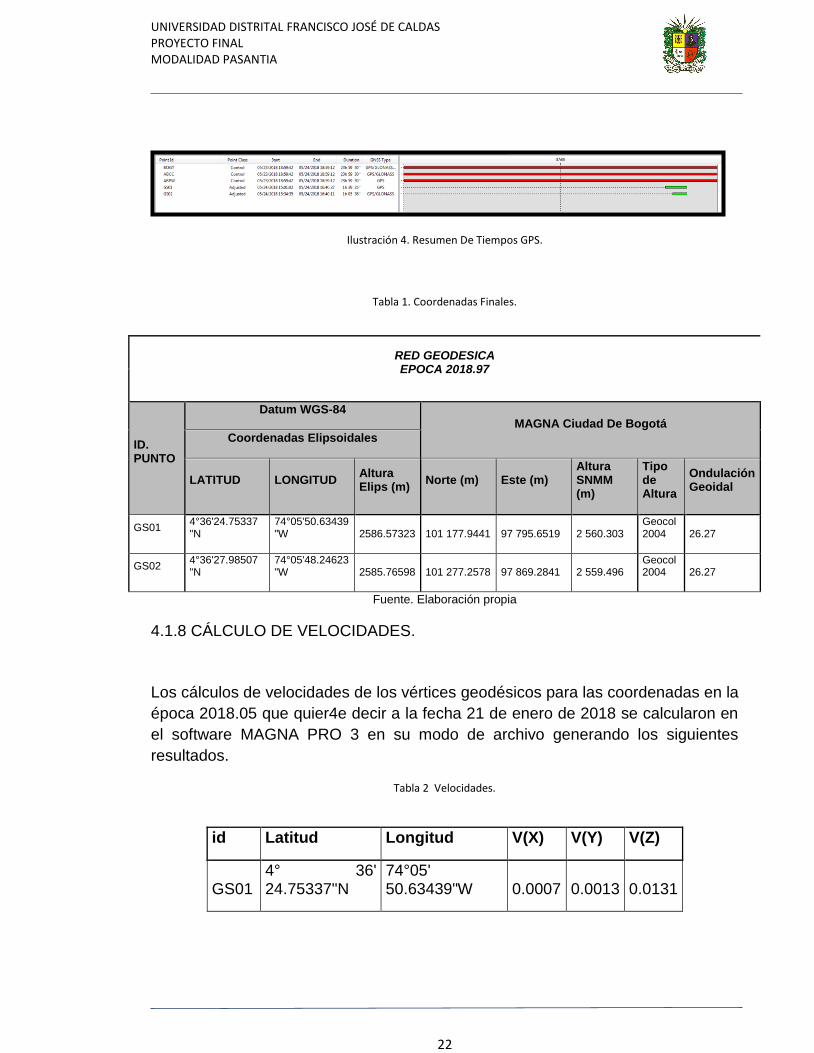
Ilustración 4. Resumen De Tiempos GPS.
Tabla 1. Coordenadas Finales.
Fuente. Elaboración propia
4.1.8 CÁLCULO DE VELOCIDADES.
Los cálculos de velocidades de los vértices geodésicos para las coordenadas en la
época 2018.05 que quier4e decir a la fecha 21 de enero de 2018 se calcularon en
el software MAGNA PRO 3 en su modo de archivo generando los siguientes
resultados.
Tabla 2 Velocidades.
id Latitud Longitud V(X) V(Y) V(Z)
GS01 4° 36' 24.75337"N
74°05' 50.63439"W 0.0007 0.0013 0.0131
RED GEODESICA EPOCA 2018.97
ID. PUNTO
Datum WGS-84
MAGNA Ciudad De Bogotá
Coordenadas Elipsoidales
LATITUD LONGITUD Altura Elips (m)
Norte (m) Este (m) Altura SNMM (m)
Tipo de Altura
Ondulación Geoidal
GS01 4°36'24.75337 "N
74°05'50.63439 "W 2586.57323 101 177.9441 97 795.6519 2 560.303
Geocol 2004 26.27
GS02 4°36'27.98507 "N
74°05'48.24623 "W 2585.76598 101 277.2578 97 869.2841 2 559.496
Geocol 2004 26.27
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
23
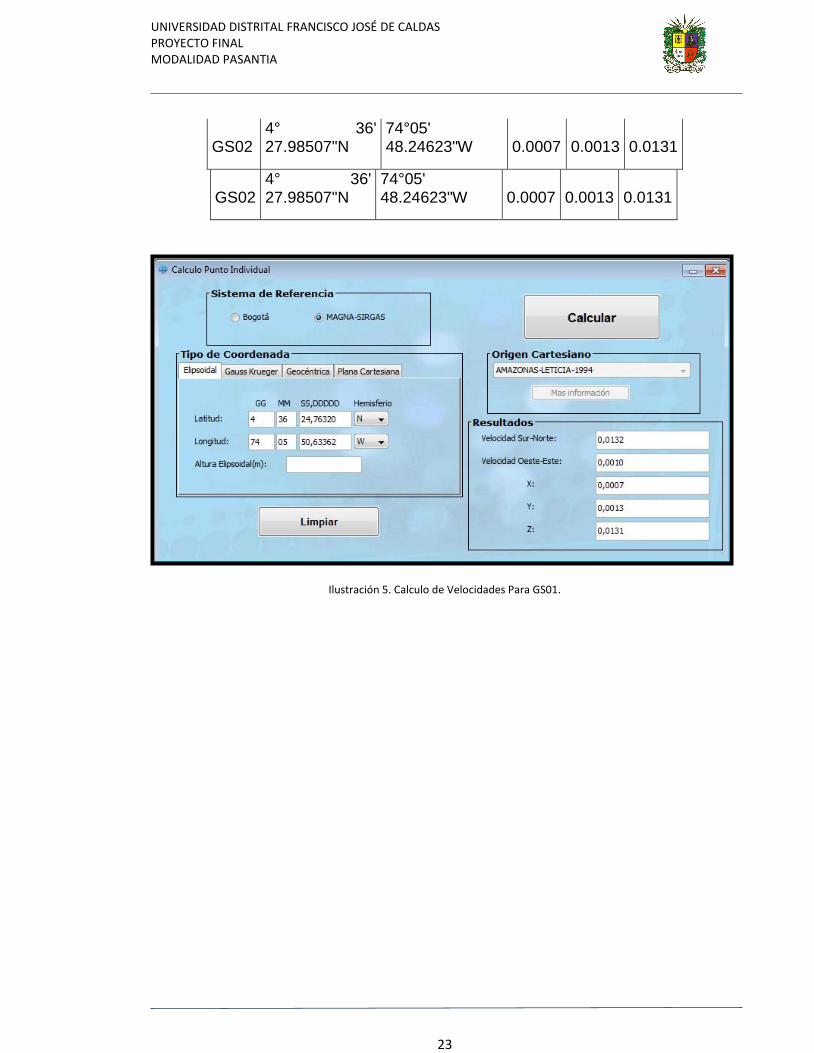
GS02 4° 36' 27.98507"N
74°05' 48.24623"W 0.0007 0.0013 0.0131
GS02 4° 36' 27.98507"N
74°05' 48.24623"W 0.0007 0.0013 0.0131
Ilustración 5. Calculo de Velocidades Para GS01.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
24
Ilustración 6. Calculo de Velocidades Para GS02.
Como resultado final se observa que los valores de las desviaciones estándar
de coordenadas en norte, este y altura no superan la tolerancia para redes
de segundo orden como en este caso para fines topográficos de 5 cm,
obteniéndose en casi todos los casos 1 centímetro y milímetros de precisión.
Para todos los vértices se utilizaron como mínimo dos estaciones
permanentes fijas, para un apropiado cálculo.
El cálculo de doble comparación arroja excelentes resultados y la
consistencia de la red supera en todos los casos el 80%, a pesar de la pobre
densificación de la red pasiva por parte del IGAC, lo que hace casi imposible
hacer planeamiento de los ángulos internos de las triangulaciones desde la
oficina.
El hecho de haber usado equipos de última tecnología GPS/GLONASS/GALILEO
doble frecuencia, entre los vectores homólogos de señal, permitió la consistencia
del cálculo Geodésico y disminución de los tiempos de rastreo en campo,
garantizando en todo momento la precisión, el PDOP y la disponibilidad de satélites.
4.2 POLIGONALES CERRADA.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
25
4.2.1 TRABAJO DE CAMPO.
Antes y durante la toma de la información en campo se llenaron los formatos de
descripción del sitio y formato de posicionamiento de campo, anexos a este
documento, que contienen toda la información de la sesión del posicionamiento
Geodésico
Reconocimiento del terreno, inicialmente se recorrió el terreno y se hace el
gráfico correspondiente; se puede realizar por partes a medida que se
avanza en el terreno o se puede realizar de manera total, lo anterior depende
del tamaño y características del terreno.
Se instaló el equipo en el punto de inicio que debe tener coordenadas
conocidas y se visa al punto de orientación que a su vez debe también tener
coordenadas conocidas, se fija el circulo horizontal en 0º0’0” y se lee el
ángulo hacia el primer punto de traslado de la poligonal, los datos son
almacenados en la estación total y se cambia de punto de estación.
Se lleva el equipo al delta nuevo y se visa el punto anteriormente ocupado
fijando circulo horizontal en 0º0’0” y barriendo hacia el siguiente delta.
Este procedimiento se repite en cada delta, teniendo en cuenta que la
poligonal no se cruce y que no quede ninguna zona sin cubrir.
Finalmente se arma nuevamente el equipo en el punto de inicio y se visa al último delta barriendo el ángulo hacia el primer delta del polígono, de esta forma se da cierre angular a la poligonal.
4.2.2 TRABAJO DE OFICINA.
Se calcula el azimut inicial, desde el punto inicial hasta el punto de referencia,
según las coordenadas de dichos puntos
Se realiza la sumatoria de ángulos de la poligonal, se ajustan o corrigen
dichos ángulos.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
26
Se calculan los azimuts de las líneas de la poligonal y de los deltas a cada
uno de los detalles del levantamiento.
Se calculan las proyecciones de los deltas de la poligonal.
Calcular la precisión de la poligonal y verificar que se cumple con la precisión
requerida según el tipo de proyecto
Se ajustan y corrigen las proyecciones de la poligonal.
Se calculan las proyecciones de los detalles, según desde el delta que fueron
tomados.
Calcular las coordenadas de todos y cada uno de los deltas.
Con las coordenadas de cada delta y las proyecciones de cada detalle, se
calculan las coordenadas de los detalles.
4.2.3 DATOS DE POLIGONALE NQS-AV CALLE 6.
La poligonal realizada parte de los puntos GS01 y GS02, y se extiende por los
vértices M1, M2, M3, M4 y M5, en una longitud de 378.440m, a continuación, se
presentan los valores de cierres.
Tabla 3 Coordenadas puntos de amarre
COORDENADAS DE AMARRE
PUNTO NORTE ESTE ALTURA
GS01 101177.944 97795.6519 2563.151
GS02 101277.258 97869.2841 2562.341
Las siguientes son las coordenadas ajustadas de los vértices de la poligonal.
Tabla 4 Coordenadas Ajustadas Poligonal

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
27
PUNTO NORTE ESTE ALTURA
M1 101210.976 97747.741 2562.777
M2 101180.063 97696.143 2563.724
M3 101114.128 97676.977 2563.182
M4 101084.974 97740.815 2563.388
M5 101107.365 97785.455 2564.039
Tabla 5 Datos de cierre angular Poligonal cerrada
ERROR ANGULAR G° M' S''
SUMA TEÓRICA 720° 0' 0''
SUMA REAL 719° 59' 58''
ERROR 0° 0' 2''
Tabla 6 Datos de cierre en distancia Poligonal cerrada.
LONGITUD DE LA POLIGONAL = (x) 378.440
ERROR √((∆EW)²+(∆NS)²) = (y) 0.004
PRECISIÓN x/y 1 : 89264.4744
La precisión obtenida como se muestra anteriormente es de 1:89264.474 lo cual
significa que se tiene un error de un metro cada 89264 metros, nuestra poligonal
tiene una distancia total de 378.440m y un error en distancia de 4 milímetros.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
28
Ilustración 7. Poligonal.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
29
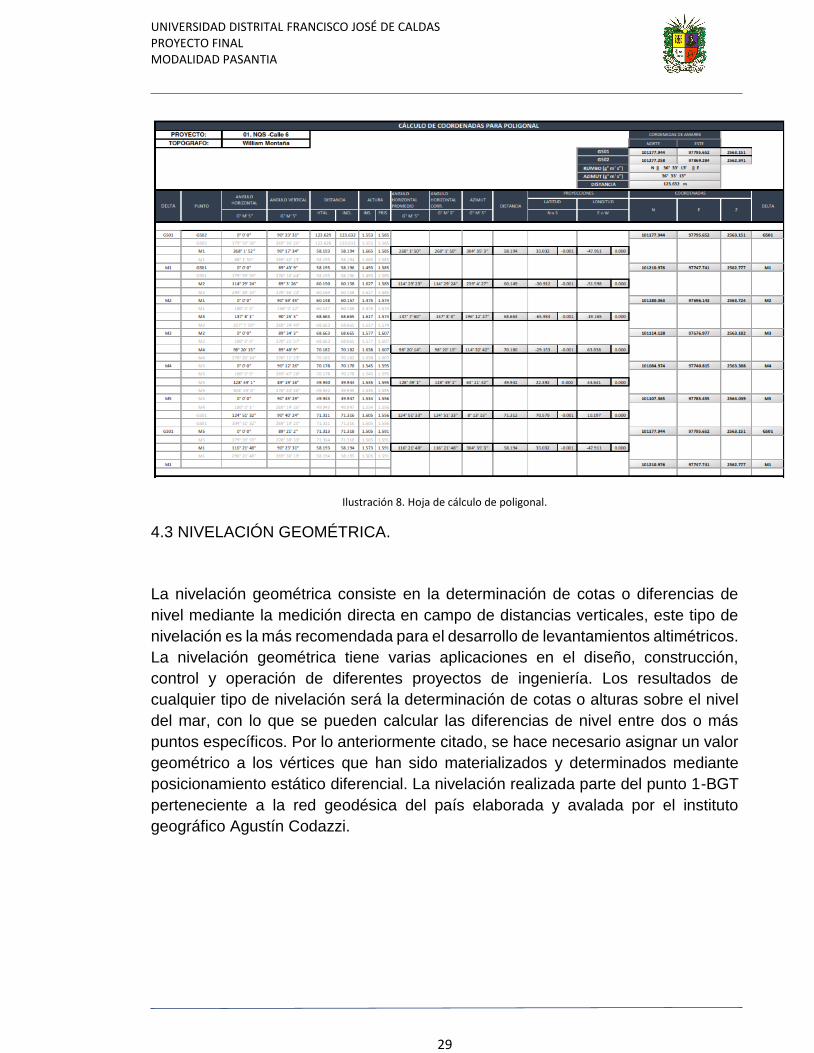
Ilustración 8. Hoja de cálculo de poligonal.
4.3 NIVELACIÓN GEOMÉTRICA.
La nivelación geométrica consiste en la determinación de cotas o diferencias de
nivel mediante la medición directa en campo de distancias verticales, este tipo de
nivelación es la más recomendada para el desarrollo de levantamientos altimétricos.
La nivelación geométrica tiene varias aplicaciones en el diseño, construcción,
control y operación de diferentes proyectos de ingeniería. Los resultados de
cualquier tipo de nivelación será la determinación de cotas o alturas sobre el nivel
del mar, con lo que se pueden calcular las diferencias de nivel entre dos o más
puntos específicos. Por lo anteriormente citado, se hace necesario asignar un valor
geométrico a los vértices que han sido materializados y determinados mediante
posicionamiento estático diferencial. La nivelación realizada parte del punto 1-BGT
perteneciente a la red geodésica del país elaborada y avalada por el instituto
geográfico Agustín Codazzi.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
30
Ilustración 9. Certificación punto 1-BGT IGAC.
Desde el punto 1-BGT se realiza traslado hasta los vértices GS01 y GS02 en una
distancia total de nivelación de 6.75Km con un error de 0.001m. La nivelación es
llevada a cabo utilizando equipos de precisión inferior al milímetro lo cual garantiza
un dato de calidad y plenamente confiable.
Tabla 7 Datos de ajuste de nivelación
ERROR MÁXIMO
PERMITIDO
km nivelados
1.25776132 0.897 Error máx
en cm
Ʃ V+ 29.473
Ʃ V- 29.472
0.012*√km nivelados 0.009 Error máx en m
Error Obtenido
0.001
¿Cumple? Si Cumple
4.4 LEVANTAMIENTO DE DETALLES.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
31
Adicionalmente al escaneo de cada puente, se realiza un levantamiento de detalles
que sirve para alcanzar las zonas no cubiertas por el escáner y como puntos de
comparación y verificación de la calidad de los datos adquiridos, estos datos fueron
tomados con estación total de topografía y procesados con el software Topcon Link
y Gestor de Mediciones.
El resultado de estos levantamientos es una nube de puntos que se incluye al plano
de planta general para realizar las verificaciones necesarias y complementar la
información escasa.
4.4.1 LEVANTAMIENTO DE SITIOS ESPECIALES.
Como complemento al levantamiento de detalles y escaneo de cada puente, fue
necesario realizar el levantamiento de las zonas cerradas en las bases del puente,
este levantamiento se realizó con estación total de topografía accediendo a estos
espacios por orificios hechos por el contratante.
Desde los puntos de amarre geodésico y los puntos ajustados de la poligonal, se
realiza traslado de coordenadas al interior de los sitios necesarios donde utilizando
el puntero laser de la estación y linternas se identificaron los detalles faltantes para
completar la correcta representación gráfica de la estructura del puente.
Simultáneamente, el profesional encargado de la adquisición de los datos, levantó
a mano alzada un bosquejo de los elementos levantados y comprobó con cinta
métrica las medidas tomadas.
4.4.1.1 ESCÁNER LÁSER.
El escaneado láser describe un método mediante el cual una superficie se muestrea o escanea usando tecnología láser. Se analiza un entorno u objeto real para tomar datos sobre su forma y, posiblemente, su apariencia (por ejemplo, el color). Los datos capturados pueden ser usados más tarde para realizar reconstrucciones digitales, planos bidimensionales o modelos tridimensionales útiles en una gran variedad de aplicaciones.
La ventaja del escaneado láser es el hecho de que puede tomar una gran cantidad
de puntos con una alta precisión en un periodo de tiempo relativamente corto. Es
como tomar una fotografía con información de profundidad.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
32
Y al igual que en el caso de la fotografía, los escáneres láser son instrumentos de
línea de vista. Por tanto, es necesario realizar múltiples capturas desde diferentes
estaciones para garantizar una cobertura completa de una estructura.
La tecnología actual de los escáneres láser se puede dividir en dos categorías,
estático y
dinámico. Cuando el escáner se mantiene en una posición fija durante la toma de
datos, se llama escaneado láser estático. Las ventajas de este método son la alta
precisión y la alta densidad de puntos. El láser escáner estático suele ser el método
más extendido a la hora de realizar escaneados terrestres.
De momento no hay ningún proceso estándar para la planificación de un escaneado
láser terrestre. Sin embargo, la planificación debe contener, como mínimo, los
siguientes puntos:
Determinar los objetivos.
Análisis del área a levantar.
Determinar las técnicas de medición y el equipamiento.
Gestión de los datos.
4.4.1.2 PREPARACIÓN DEL LEVANTAMIENTO.
La fase de preparación del levantamiento incluye la toma de decisión de la técnica de registro a usar. Estas técnicas se pueden subdividir en tres categorías: registro mediante resección de dianas escaneadas, registro mediante estacionamiento en puntos de referencia conocidos y registro utilizando constreñimientos punto a punto.
4.4.1.3 ESTACIONAMIENTO DEL ESCANER.
Montaje del trípode: Se abre el trípode y se extienden sus patas. Hay que asegurarse de que el trípode está en un suelo estable. Normalmente, el escáner se coloca a la altura de los ojos. Cuando la superficie del suelo tiene que ser escaneada es mejor una posición más alta porque proporciona un mejor ángulo de inclinación.
Sujetar el escáner al trípode colocándolo sobre él y anclándolo. ƒ Dependiendo de la técnica de registro, el escáner se deberá poner sobre un

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
33
punto de referencia conocido.
Nivelar el escáner. Variando la longitud de dos de las patas del trípode, se nivela la superficie superior utilizando niveles precisos. La burbuja debe estar dentro del círculo interior. Hay que ser lo más precisos posible.
4.4.1.4 DEFINICIÓN DEL ÁREA A ESCANEAR
Aunque la mayoría de los escáneres actuales pueden escanear 360º totalmente esto no es necesario siempre, por esta razón hay que definir la zona a escanear definiendo valores de distancia máxima y ángulos de apertura del escáner.
4.4.1.5 TOMA DE DATOS
Una vez se ha determinado el campo de visión y se ha fijado la resolución más adecuada, se puede empezar a escanear. El proceso de escaneo es totalmente automático. Tras apretar el botón de control en el programa de control del escáner o directamente en el control del escáner, el escáner se mueve al punto de inicio y empieza a tomar puntos. Estos puntos se almacenan en el ordenador portátil o en la memoria interna del escáner. Cuando en ordenador portátil está conectado al escáner, los puntos se visualizan directamente en tres dimensiones en la pantalla y dan una vista del área que se está escaneando. Después del escaneado, es bueno comprobar el escaneado realizado por si hubiera obstrucciones imprevistas que provoquen zonas ocultas en los datos.
4.4.1.6 INSPECCIÓN DE REDES CON GPR.
En cada proceso de inspección se definió el área a trabajar y el objetivo a
cumplir (Solicitud del cliente), ubicando los puntos de partida para cada
sección tomada y orientando estas respecto a un rumbo definido que se
establece perpendicular a cada tubería a observar.
Luego se realizó la toma de datos por secciones transversales, obteniendo
la información de datos crudos arrojados por los equipos.
La información cruda obtenida se le realizar un respectivo procesamiento
mediante los programas de procesamiento SPIVIEW y REFLEX 2D QUICK.
Luego de procesadas las imágenes se procede a realizar las respectivas
interpretaciones de tuberías y elementos encontrados en el subsuelo.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
34
La interpretación también se acompañó de la obtención de la profundidad de
las tuberías a cota Clave y la determinación de los diámetros de estas
mediante técnicas geométricas de procesamiento en la hipérbola de
reflexión.
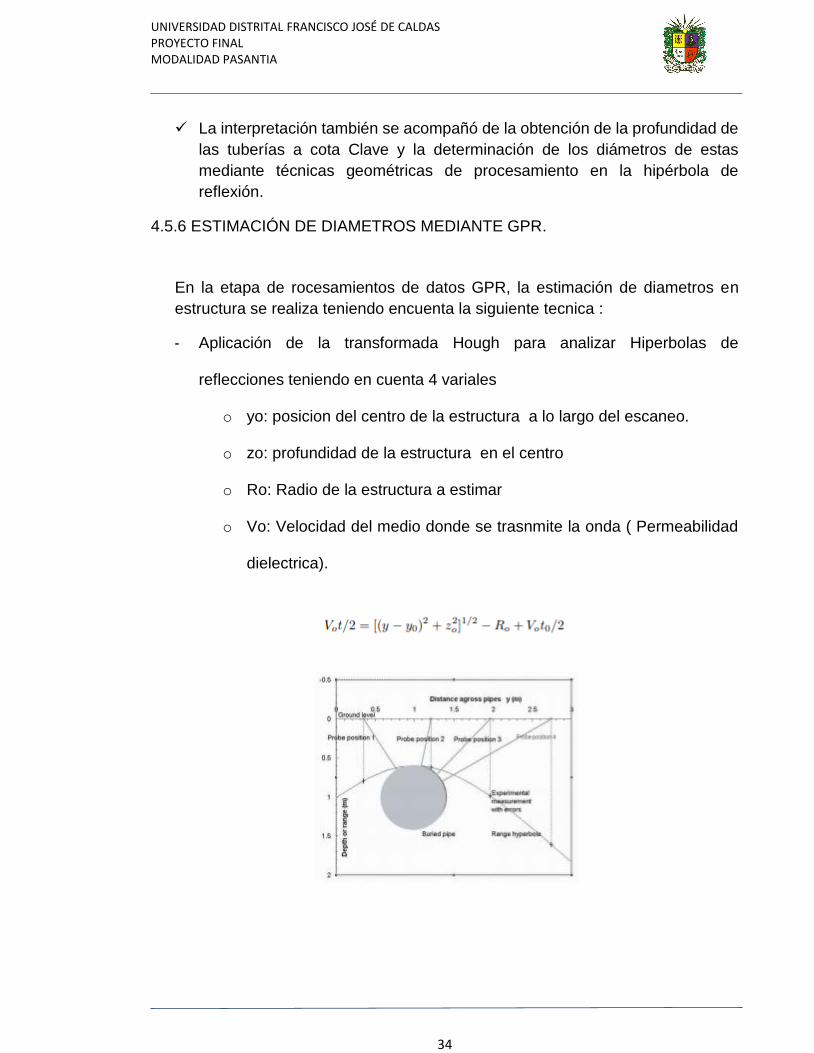
4.5.6 ESTIMACIÓN DE DIAMETROS MEDIANTE GPR.
En la etapa de rocesamientos de datos GPR, la estimación de diametros en
estructura se realiza teniendo encuenta la siguiente tecnica :
- Aplicación de la transformada Hough para analizar Hiperbolas de
reflecciones teniendo en cuenta 4 variales
o yo: posicion del centro de la estructura a lo largo del escaneo.
o zo: profundidad de la estructura en el centro
o Ro: Radio de la estructura a estimar
o Vo: Velocidad del medio donde se trasnmite la onda ( Permeabilidad
dielectrica).
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
35
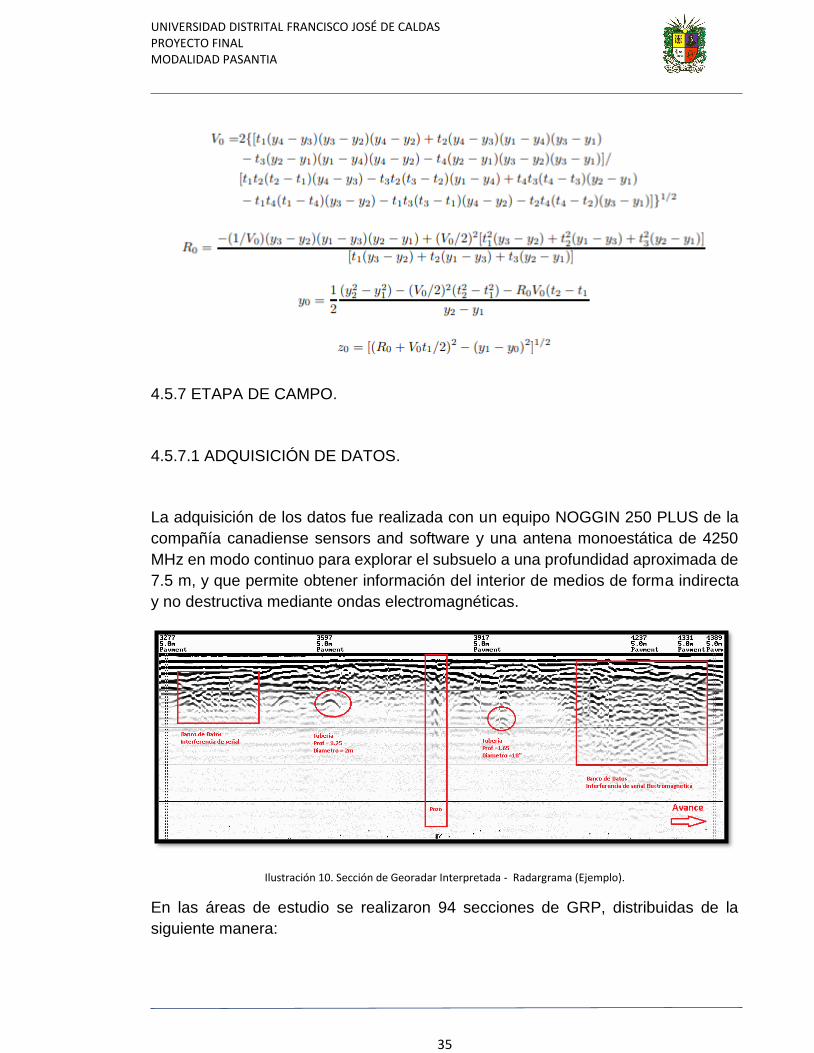
4.5.7 ETAPA DE CAMPO.
4.5.7.1 ADQUISICIÓN DE DATOS.
La adquisición de los datos fue realizada con un equipo NOGGIN 250 PLUS de la
compañía canadiense sensors and software y una antena monoestática de 4250
MHz en modo continuo para explorar el subsuelo a una profundidad aproximada de
7.5 m, y que permite obtener información del interior de medios de forma indirecta
y no destructiva mediante ondas electromagnéticas.
Ilustración 10. Sección de Georadar Interpretada - Radargrama (Ejemplo).
En las áreas de estudio se realizaron 94 secciones de GRP, distribuidas de la
siguiente manera:

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
36
- PUENTE 1: AV.BOYACA –CALLE 13 : 19 Secciones o perfiles GPR.
- PUENTE 2: CALLE 26-CRA 30: 27 Secciones o perfiles GPR.
- PUENTE 3: CALLE19-CRA30: 12 Secciones o perfiles GPR.
- PUENTE 4: CALLE13-CRA30: 14 Secciones o perfiles GPR.
- PUENTE 5: CALLE6-CRA30: 22 Secciones o perfiles GPR.
En total se recolectaron 2000m de georadar con ventana de tiempo de 50 y 60 ns,
32 trazas por segundo y 512 muestras por traza. Los datos se procesaron con el
programa Radan 6 de GSSI para remover ruido y ofrecer una mejor resolución,
normalizar la distancia horizontal y estimar la profundidad. Algunos de los procesos
empleados fueron: Filtro paso-banda con frecuencia de corte de (75-800MHz), filtro
background removal de 999 trazas, filtro running average de 7 trazas, migración,
normalización de la distancia y ajuste de ganancias.
A continuación, se enumeran las actividades seguidas en campo:
• En cada proceso de inspección se definió el área a trabajar y el objetivo a
cumplir (Solicitud del cliente), ubicando los puntos de partida para cada sección
tomada y orientando estas respecto a un rumbo definido que se establece
perpendicular a cada tubería a observar.
• Luego se realizó la toma de datos por secciones transversales, obteniendo la
información de datos crudos arrojados por los equipos.
• La información cruda obtenida se le realizar un respectivo procesamiento
mediante los programas de procesamiento SPIVIEW y REFLEX 2D QUICK .
• Luego de procesadas las imágenes se procede a realizar las respectivas
interpretaciones de tuberías y elementos encontrados en el subsuelo.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
37
• La interpretación también se acompañó de la obtención de la profundidad de
las tuberías a cota Clave y la determinación de los diámetros de estas mediante
técnicas geométricas de procesamiento en la hipérbola de reflexión.
4.5.8 HERRAMIENTAS Y EQUIPOS.
La instrumentación empleada para los trabajos de adquisición de datos con
radar de subsuelo ha sido:
• Un radar de subsuelo NOGGIN 250 PLUS.
Dos SMART CAR de la antena, equipado con un odómetro.
Una antena apantallada de frecuencia central 250 MHz.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
38
4.5.9 PARÁMETROS PARA LA ADQUISICIÓN DE DATOS GPR
Ventana temporal: 100 ns
Número de muestras por traza: 512
Número de trazas cada metro: 120
Función de amplificación (ganancia): lineal con extremos en 20 y en +49 Db
Ilustración 11. Profundidades alcanzadas por tecnología GPR.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
39
5. RESULTADOS.
5.1. GEODESIA.
5.1.1. FORMATOS DE LOCALIZACIÓN.
Se realizaron formatos de localización para cada uno de los vértices posicionados
en los que se describe la toponimia para su fácil localización además del azimut de
referencia con su pareja, indicando también si se trata de incrustación o mojón y el
equipo usado.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
40
Ilustración 12. Formato de localización GS-01.
5.1.2. COORDENADAS FINALES.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
41
Ilustración 13. Coordenadas finales.
Ilustración 14. Incrustación Placa GS-01.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
42
Ilustración 15. Posicionamiento.
5.2. POLIGONAL.
Para cada puente se realizó una poligonal cerrada con base en los dos vértices
posicionados, usando las especificaciones de toma de información del IDU, las
poligonales fueron amarradas a la red MAGNA SIRGAS del IGAC .

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
43
NORTE ESTE
101177.944 97795.652 2563.151
101277.258 97869.284 2562.341
G° M' S'' G° M' S''HTAL. INCL. INS. PRIS.
G° M' S''G° M' S'' G° M' S''
GS01 GS02 0° 0' 0'' 90° 23' 31'' 123.629 123.632 1.553 1.59 101177.944 97795.652 2563.151 GS01
GS02 179° 59' 58'' 269° 36' 26'' 123.628 123.631 1.553 1.59
M1 268° 1' 52'' 90° 17' 34'' 58.193 58.194 1.665 1.59 268° 1' 50'' 268° 1' 50'' 304° 35' 3'' 58.193 33.031 0.002 -47.910 0.001
M1 88° 1' 50'' 269° 42' 13'' 58.193 58.194 1.665 1.59
M1 GS01 0° 0' 0'' 89° 43' 9'' 58.195 58.196 1.493 1.59 101210.977 97747.743 2562.777 M1
GS01 179° 59' 59'' 270° 16' 44'' 58.195 58.196 1.493 1.59
M2 114° 29' 24'' 89° 3' 26'' 60.150 60.158 1.627 1.59 114° 29' 24'' 114° 29' 15'' 239° 4' 17'' 60.150 -30.915 0.002 -51.597 0.001
M2 294° 29' 24'' 270° 56' 22'' 60.150 60.158 1.627 1.59
M2 M1 0° 0' 0'' 90° 59' 45'' 60.148 60.157 1.475 1.57 101180.064 97696.147 2563.724 M2
M1 180° 0' 0'' 269° 0' 12'' 60.147 60.156 1.475 1.57
M3 137° 8' 1'' 90° 25' 3'' 68.663 68.665 1.617 1.57 137° 8' 59'' 137° 8' 50'' 196° 13' 7'' 68.663 -65.931 0.002 -19.178 0.001
M3 317° 7' 59'' 269° 34' 49'' 68.663 68.665 1.617 1.57
M3 M2 0° 0' 0'' 89° 34' 3'' 68.663 68.665 1.577 1.61 101114.136 97676.971 2563.182 M3
M2 180° 0' 0'' 270° 25' 57'' 68.663 68.665 1.577 1.61
M4 98° 20' 15'' 89° 48' 9'' 70.182 70.182 1.638 1.61 98° 20' 14'' 98° 20' 5'' 114° 33' 11'' 70.182 -29.163 0.002 63.836 0.001
M4 278° 20' 14'' 270° 11' 23'' 70.182 70.182 1.638 1.61
M4 M3 0° 0' 0'' 90° 12' 26'' 70.178 70.178 1.545 1.6 101084.975 97740.807 2563.388 M4
M3 180° 0' 0'' 269° 47' 28'' 70.178 70.178 1.545 1.6
M5 128° 49' 1'' 89° 19' 16'' 49.940 49.944 1.535 1.6 128° 48' 60'' 128° 48' 51'' 63° 22' 2'' 49.942 22.387 0.002 44.643 0.001
M5 308° 49' 0'' 270° 40' 36'' 49.942 49.945 1.535 1.6
M5 M4 0° 0' 0'' 90° 45' 29'' 49.943 49.947 1.534 1.56 101107.364 97785.451 2564.039 M5
M4 180° 0' 1'' 269° 14' 26'' 49.943 49.947 1.534 1.56
GS01 124° 51' 32'' 90° 40' 24'' 71.311 71.316 1.605 1.56 124° 51' 32'' 124° 51' 23'' 8° 13' 24'' 71.311 70.578 0.002 10.200 0.001
GS01 304° 51' 32'' 269° 19' 20'' 71.311 71.316 1.605 1.56
GS01 M5 0° 0' 0'' 89° 21' 2'' 71.313 71.318 1.505 1.59 101177.944 97795.652 2563.151 GS01
M5 179° 59' 59'' 270° 38' 33'' 71.314 71.318 1.505 1.59
M1 116° 21' 48'' 90° 23' 31'' 58.193 58.194 1.573 1.59 116° 21' 48'' 116° 21' 39'' 304° 35' 3'' 58.194 33.032 0.002 -47.910 0.001
M1 296° 21' 48'' 269° 36' 19'' 58.194 58.195 1.505 1.59
M1 378.4408 0.01201751 0.00739011 101210.977 97747.743 2562.777 M1
0.014108
∑ E ∑ N
6 ∑ W ∑ S
720° 0' 0'' ∆EW ∆NS
720° 0' 57'' ∑E+∑w ∑N+∑S
-1° 59' 3''
PRECISIÓN x/y 1 : 26824.6445999999
ERROR EN ANGULO
LONGITUD DE LA POLIGONAL = (x) 378.441
PRECISIÓN EQUIPO a= 2" ERROR √((∆EW)²+(∆NS)²) = (y) 0.014
SUMA TEÓRICA (180* n±2) -0.007 -0.012
SUMA OBTENIDA -237.363 -252.006
No. VÉRTICES (n) 118.678 125.997
ERROR ANGULAR G° M' S'' 26824.644580
SUMA TEÓRICA 720° 0' 0''
SUMA REAL 720° 0' 57''
ERROR -1° 59' 3''
-118.685 -126.009
ANGULO
HORIZONTAL
CORR.
AZIMUT
PRECISIÓN 1 : 26824.6445999999
DISTANCIA
PROYECCIONES COORDENADAS
DELTAZ
N o S E o W
DISTANCIA ALTURA LATITUD LONGITUD
N EDELTA PUNTO
ANGULO
HORIZONTALANGULO VERTICAL
AZIMUT (g° m' s'') 36° 33' 13''
ANGULO
HORIZONTAL
PROMEDIO
DISTANCIA 123.632 m
GS01
GS02
RUMBO (g° m' s'') N ǁ 36° 33' 13' ǁ E
TOPÓGRAFO: Armando Tibavisco
CÁLCULO DE COORDENADAS PARA POLIGONAL PROYECTO: 01. NQS -Calle 6 CORDENADAS DE AMARRE
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
44
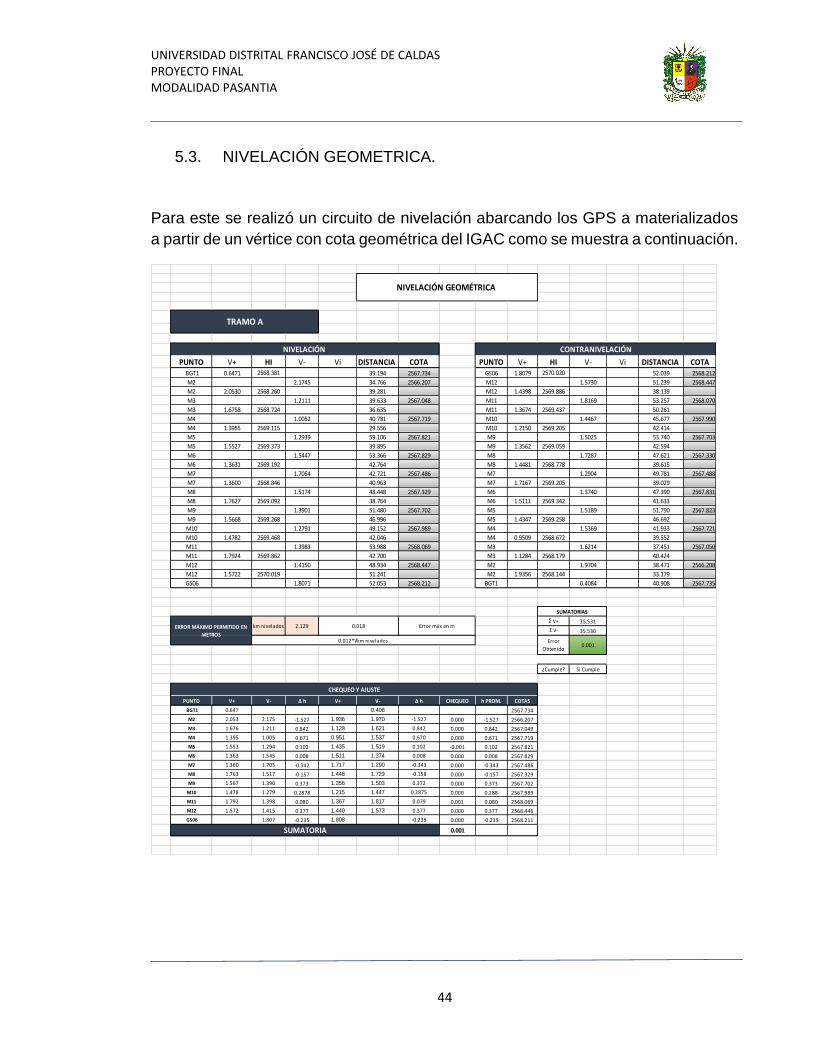
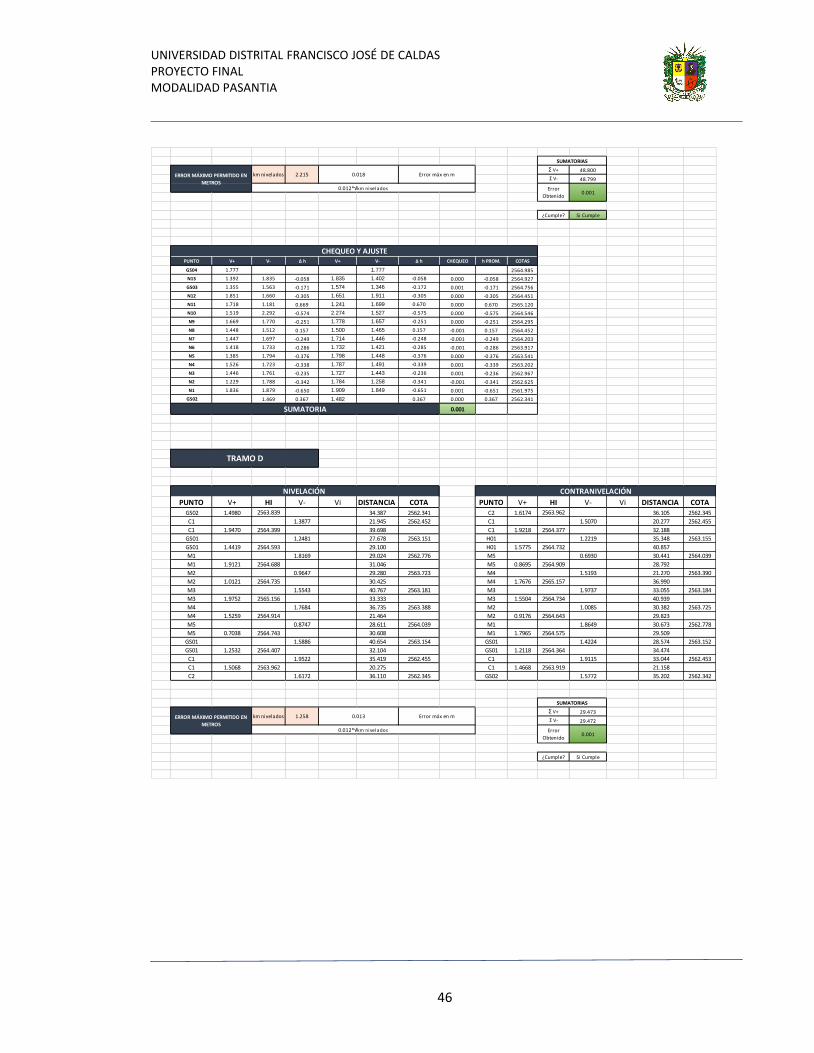
5.3. NIVELACIÓN GEOMETRICA.
Para este se realizó un circuito de nivelación abarcando los GPS a materializados
a partir de un vértice con cota geométrica del IGAC como se muestra a continuación.
PUNTO V+ HI V- Vi DISTANCIA COTA PUNTO V+ HI V- Vi DISTANCIA COTA BGT1 0.6471 2568.381 39.194 2567.734 GS06 1.8079 2570.020 52.039 2568.212
M2 2.1745 34.766 2566.207 M12 1.5730 51.239 2568.447
M2 2.0530 2568.260 39.281 M12 1.4398 2569.886 38.139
M3 1.2111 39.633 2567.048 M11 1.8169 53.257 2568.070
M3 1.6758 2568.724 36.635 M11 1.3674 2569.437 50.261
M4 1.0052 40.781 2567.719 M10 1.4467 45.677 2567.990
M4 1.3955 2569.115 29.556 M10 1.2150 2569.205 42.414
M5 1.2939 59.106 2567.821 M9 1.5025 53.740 2567.703
M5 1.5527 2569.373 39.895 M9 1.3562 2569.059 42.594
M6 1.5447 53.366 2567.829 M8 1.7287 47.621 2567.330
M6 1.3631 2569.192 42.764 M8 1.4481 2568.778 39.615
M7 1.7054 42.721 2567.486 M7 1.2904 49.781 2567.488
M7 1.3600 2568.846 40.963 M7 1.7167 2569.205 39.029
M8 1.5174 48.448 2567.329 M6 1.3740 47.390 2567.831
M8 1.7627 2569.092 38.764 M6 1.5111 2569.342 41.633
M9 1.3901 51.480 2567.702 M5 1.5189 51.790 2567.823
M9 1.5668 2569.268 46.996 M5 1.4347 2569.258 46.692
M10 1.2791 49.152 2567.989 M4 1.5369 41.933 2567.721
M10 1.4782 2569.468 42.046 M4 0.9509 2568.672 39.552
M11 1.3983 53.988 2568.069 M3 1.6214 37.451 2567.050
M11 1.7924 2569.862 42.700 M3 1.1284 2568.179 40.424
M12 1.4150 48.934 2568.447 M2 1.9704 38.471 2566.208
M12 1.5722 2570.019 51.241 M2 1.9356 2568.144 33.179
GS06 1.8071 52.053 2568.212 BGT1 0.4084 40.908 2567.735
18.220 17.742 1064.463 17.312 17.788 1064.831
Ʃ V+ 35.531
Ʃ V- 35.530
¿Cumple? Si Cumple
PUNTO V+ V- ∆ h V+ V- ∆ h CHEQUEO h PROM. COTAS
BGT1 0.647 0.408 2567.734
M2 2.053 2.175 -1.527 1.936 1.970 -1.527 0.000 -1.527 2566.207
M3 1.676 1.211 0.842 1.128 1.621 0.842 0.000 0.842 2567.049
M4 1.395 1.005 0.671 0.951 1.537 0.670 0.000 0.671 2567.719
M5 1.553 1.294 0.102 1.435 1.519 0.102 -0.001 0.102 2567.821
M6 1.363 1.545 0.008 1.511 1.374 0.008 0.000 0.008 2567.829
M7 1.360 1.705 -0.342 1.717 1.290 -0.343 0.000 -0.343 2567.486
M8 1.763 1.517 -0.157 1.448 1.729 -0.158 0.000 -0.157 2567.329
M9 1.567 1.390 0.373 1.356 1.503 0.372 0.000 0.373 2567.702
M10 1.478 1.279 0.2878 1.215 1.447 0.2875 0.000 0.288 2567.989
M11 1.792 1.398 0.080 1.367 1.817 0.079 0.001 0.080 2568.069
M12 1.572 1.415 0.377 1.440 1.573 0.377 0.000 0.377 2568.446
GS06 1.807 -0.235 1.808 -0.235 0.000 -0.235 2568.211
0.001
CHEQUEO Y AJUSTE
SUMATORIA
NIVELACIÓN GEOMÉTRICA
TRAMO A
NIVELACIÓN CONTRANIVELACIÓN
Error
Obtenido0.001
SUMATORIAS
ERROR MÁXIMO PERMITIDO EN
METROS
km nivelados 2.129 0.018 Error máx en m
0.012*√km nivelados

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
45
PUNTO V+ HI V- Vi DISTANCIA COTA PUNTO V+ HI V- Vi DISTANCIA COTA GS06 1.2127 2569.424 26.931 2568.211 GS04 2.1433 2567.128 38.213 2564.985
T6 1.7515 24.167 2567.672 T1 1.2360 36.032 2565.892
T6 1.2874 2568.960 29.655 T1 1.7678 2567.660 39.071
GS05 1.7329 30.869 2567.227 T2 1.2997 39.149 2566.360
GS05 1.1713 2568.398 44.348 T2 1.7384 2568.099 39.372
T5 1.2942 42.965 2567.104 T3 1.4255 38.163 2566.673
T5 1.6331 2568.737 41.208 T3 1.7830 2568.456 39.318
T4 1.6716 28.956 2567.065 T4 1.3897 38.710 2567.066
T4 1.4210 2568.486 38.508 T4 1.6341 2568.701 35.231
T3 1.8143 39.674 2566.672 T5 1.5955 34.918 2567.105
T3 1.4119 2568.084 39.212 T5 1.2661 2568.371 42.529
T2 1.7243 38.323 2566.360 GS05 1.1432 44.756 2567.228
T2 1.3132 2567.673 39.121 GS05 1.7212 2568.949 29.098
T1 1.7810 39.108 2565.892 T6 1.2753 31.336 2567.674
T1 1.2349 2567.127 36.001 T6 1.7511 2569.425 24.163
GS04 2.1417 38.264 2564.985 GS06 1.2132 26.927 2568.212
10.685 13.912 577.311 13.805 10.578 576.987
Ʃ V+ 24.490
Ʃ V- 24.490
¿Cumple? Si Cumple
PUNTO V+ V- ∆ h V+ V- ∆ h CHEQUEO h PROM. COTAS
GS06 1.213 1.213 2568.211
T6 1.287 1.751 -0.539 1.751 1.275 -0.538 -0.001 -0.538 2567.673
GS05 1.171 1.733 -0.446 1.721 1.143 -0.446 0.000 -0.446 2567.227
T5 1.633 1.294 -0.123 1.266 1.596 -0.123 0.000 -0.123 2567.104
T4 1.421 1.672 -0.0385 1.634 1.390 -0.0386 0.000 -0.039 2567.066
T3 1.412 1.814 -0.393 1.783 1.426 -0.393 0.000 -0.393 2566.672
T2 1.313 1.724 -0.312 1.738 1.300 -0.313 0.000 -0.313 2566.360
T1 1.235 1.781 -0.468 1.768 1.236 -0.468 0.000 -0.468 2565.892
GS04 2.142 -0.907 2.143 -0.907 0.000 -0.907 2564.985
0.0006
PUNTO V+ HI V- Vi DISTANCIA COTA PUNTO V+ HI V- Vi DISTANCIA COTAGS04 1.7769 2566.762 31.045 2564.985 GS02 1.4818 2563.823 37.299 2562.342
N13 1.8348 21.322 2564.927 N1 1.8486 41.907 2561.975
N13 1.3920 2566.319 41.150 N1 1.9095 2563.884 36.737
GS03 1.5630 37.888 2564.756 N2 1.2582 36.651 2562.626
GS03 1.3555 2566.111 19.503 N2 1.7842 2564.410 40.300
N12 1.6604 24.434 2564.451 N3 1.4434 37.927 2562.967
N12 1.8508 2566.302 28.310 N3 1.7270 2564.694 38.322
N11 1.1815 33.870 2565.120 N4 1.4908 39.584 2563.203
N11 1.7180 2566.838 39.755 N4 1.7872 2564.990 40.935
N10 2.2924 47.330 2564.546 N5 1.4480 38.787 2563.542
N10 1.5188 2566.065 42.545 N5 1.7976 2565.340 39.856
N9 1.7699 37.824 2564.295 N6 1.4213 37.374 2563.919
N9 1.6690 2565.964 38.916 N6 1.7315 2565.650 40.737
N8 1.5124 41.322 2564.451 N7 1.4460 38.561 2564.204
N8 1.4480 2565.899 38.180 N7 1.7136 2565.918 40.861
N7 1.6971 39.560 2564.202 N8 1.4651 36.842 2564.453
N7 1.4467 2565.649 38.016 N8 1.5001 2565.953 40.245
N6 1.7328 41.308 2563.916 N9 1.6573 39.946 2564.295
N6 1.4183 2565.334 37.661 N9 1.7782 2566.074 39.741
N5 1.7944 39.586 2563.540 N10 1.5273 40.607 2564.546
N5 1.3845 2564.925 41.610 N10 2.2738 2566.820 39.666
N4 1.7229 38.125 2563.202 N11 1.6989 47.370 2565.121
N4 1.5261 2564.728 30.865 N11 1.2411 2566.362 27.965
N3 1.7609 47.036 2562.967 N12 1.9109 34.233 2564.451
N3 1.4460 2564.413 38.998 N12 1.6506 2566.102 24.277
N2 1.7875 39.192 2562.625 GS03 1.3459 19.652 2564.756
N2 1.2289 2563.854 37.560 GS03 1.5737 2566.330 39.840
N1 1.8790 35.749 2561.975 N13 1.4019 39.044 2564.928
N1 1.8357 2563.811 36.981 N13 1.8350 2566.763 21.316
GS02 1.4692 42.152 2562.342 GS04 1.7774 31.049 2564.985
23.015 25.658 1107.790 25.785 23.141 1107.630
SUMATORIAS
TRAMO C
NIVELACIÓN CONTRANIVELACIÓN
TRAMO B
NIVELACIÓN CONTRANIVELACIÓN
SUMATORIA
Error
Obtenido0.001
CHEQUEO Y AJUSTE
ERROR MÁXIMO PERMITIDO EN
METROS
km nivelados 1.154 0.013 Error máx en m
0.012*√km nivelados
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
46
Ʃ V+ 48.800
Ʃ V- 48.799
¿Cumple? Si Cumple
PUNTO V+ V- ∆ h V+ V- ∆ h CHEQUEO h PROM. COTAS
GS04 1.777 1.777 2564.985
N13 1.392 1.835 -0.058 1.835 1.402 -0.058 0.000 -0.058 2564.927
GS03 1.355 1.563 -0.171 1.574 1.346 -0.172 0.001 -0.171 2564.756
N12 1.851 1.660 -0.305 1.651 1.911 -0.305 0.000 -0.305 2564.451
N11 1.718 1.181 0.669 1.241 1.699 0.670 0.000 0.670 2565.120
N10 1.519 2.292 -0.574 2.274 1.527 -0.575 0.000 -0.575 2564.546
N9 1.669 1.770 -0.251 1.778 1.657 -0.251 0.000 -0.251 2564.295
N8 1.448 1.512 0.157 1.500 1.465 0.157 -0.001 0.157 2564.452
N7 1.447 1.697 -0.249 1.714 1.446 -0.248 -0.001 -0.249 2564.203
N6 1.418 1.733 -0.286 1.732 1.421 -0.285 -0.001 -0.286 2563.917
N5 1.385 1.794 -0.376 1.798 1.448 -0.376 0.000 -0.376 2563.541
N4 1.526 1.723 -0.338 1.787 1.491 -0.339 0.001 -0.339 2563.202
N3 1.446 1.761 -0.235 1.727 1.443 -0.236 0.001 -0.236 2562.967
N2 1.229 1.788 -0.342 1.784 1.258 -0.341 -0.001 -0.341 2562.625
N1 1.836 1.879 -0.650 1.909 1.849 -0.651 0.001 -0.651 2561.975
GS02 1.469 0.367 1.482 0.367 0.000 0.367 2562.341
0.001
PUNTO V+ HI V- Vi DISTANCIA COTA PUNTO V+ HI V- Vi DISTANCIA COTA GS02 1.4980 2563.839 34.387 2562.341 C2 1.6174 2563.962 36.105 2562.345
C1 1.3877 21.945 2562.452 C1 1.5070 20.277 2562.455
C1 1.9470 2564.399 39.698 C1 1.9218 2564.377 32.188
GS01 1.2481 27.678 2563.151 H01 1.2219 35.348 2563.155
GS01 1.4419 2564.593 29.100 H01 1.5775 2564.732 40.857
M1 1.8169 29.024 2562.776 M5 0.6930 30.441 2564.039
M1 1.9121 2564.688 31.046 M5 0.8695 2564.909 28.792
M2 0.9647 29.280 2563.723 M4 1.5193 21.270 2563.390
M2 1.0121 2564.735 30.425 M4 1.7676 2565.157 36.990
M3 1.5543 40.767 2563.181 M3 1.9737 33.055 2563.184
M3 1.9752 2565.156 33.333 M3 1.5504 2564.734 40.939
M4 1.7684 36.735 2563.388 M2 1.0085 30.382 2563.725
M4 1.5259 2564.914 21.464 M2 0.9176 2564.643 29.823
M5 0.8747 28.611 2564.039 M1 1.8649 30.673 2562.778
M5 0.7038 2564.743 30.608 M1 1.7965 2564.575 29.509
GS01 1.5886 40.654 2563.154 GS01 1.4224 28.574 2563.152
GS01 1.2532 2564.407 32.104 GS01 1.2118 2564.364 34.474
C1 1.9522 35.419 2562.455 C1 1.9115 33.044 2562.453
C1 1.5068 2563.962 20.275 C1 1.4668 2563.919 21.158
C2 1.6172 36.110 2562.345 GS02 1.5772 35.202 2562.342
14.776 14.773 628.662 14.697 14.699 629.099
Ʃ V+ 29.473
Ʃ V- 29.472
¿Cumple? Si Cumple
Error
Obtenido0.001
ERROR MÁXIMO PERMITIDO EN
METROS
km nivelados 2.215 0.018 Error máx en m
Error
Obtenido
CHEQUEO Y AJUSTE
SUMATORIA
NIVELACIÓN CONTRANIVELACIÓN
ERROR MÁXIMO PERMITIDO EN
METROS
km nivelados
0.012*√km nivelados
1.258 0.013 Error máx en m
SUMATORIAS
0.012*√km nivelados
SUMATORIAS
0.001
TRAMO D
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
47
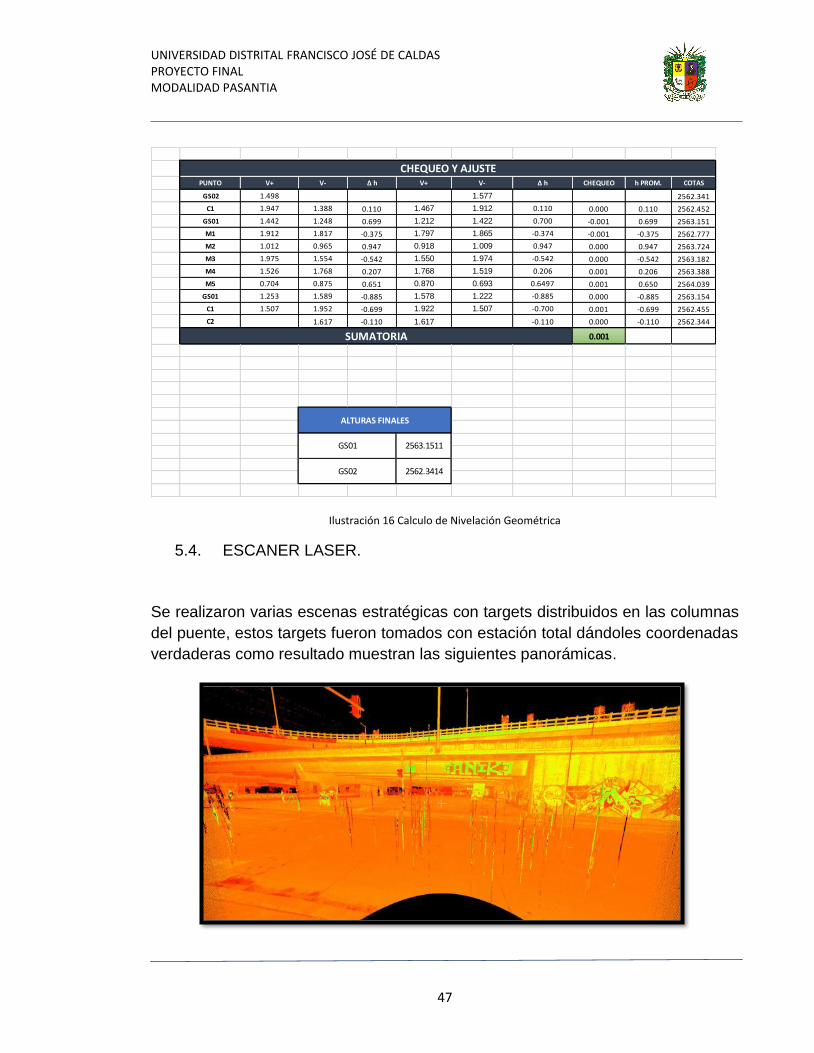
Ilustración 16 Calculo de Nivelación Geométrica
5.4. ESCANER LASER.
Se realizaron varias escenas estratégicas con targets distribuidos en las columnas
del puente, estos targets fueron tomados con estación total dándoles coordenadas
verdaderas como resultado muestran las siguientes panorámicas.
PUNTO V+ V- ∆ h V+ V- ∆ h CHEQUEO h PROM. COTAS
GS02 1.498 1.577 2562.341
C1 1.947 1.388 0.110 1.467 1.912 0.110 0.000 0.110 2562.452
GS01 1.442 1.248 0.699 1.212 1.422 0.700 -0.001 0.699 2563.151
M1 1.912 1.817 -0.375 1.797 1.865 -0.374 -0.001 -0.375 2562.777
M2 1.012 0.965 0.947 0.918 1.009 0.947 0.000 0.947 2563.724
M3 1.975 1.554 -0.542 1.550 1.974 -0.542 0.000 -0.542 2563.182
M4 1.526 1.768 0.207 1.768 1.519 0.206 0.001 0.206 2563.388
M5 0.704 0.875 0.651 0.870 0.693 0.6497 0.001 0.650 2564.039
GS01 1.253 1.589 -0.885 1.578 1.222 -0.885 0.000 -0.885 2563.154
C1 1.507 1.952 -0.699 1.922 1.507 -0.700 0.001 -0.699 2562.455
C2 1.617 -0.110 1.617 -0.110 0.000 -0.110 2562.344
0.001
CHEQUEO Y AJUSTE
SUMATORIA
GS01
GS02
2563.1511
2562.3414
ALTURAS FINALES

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
48
Ilustración 17 Localización de Escaneos

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
49
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
50

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
51

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
52

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
53

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
54

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
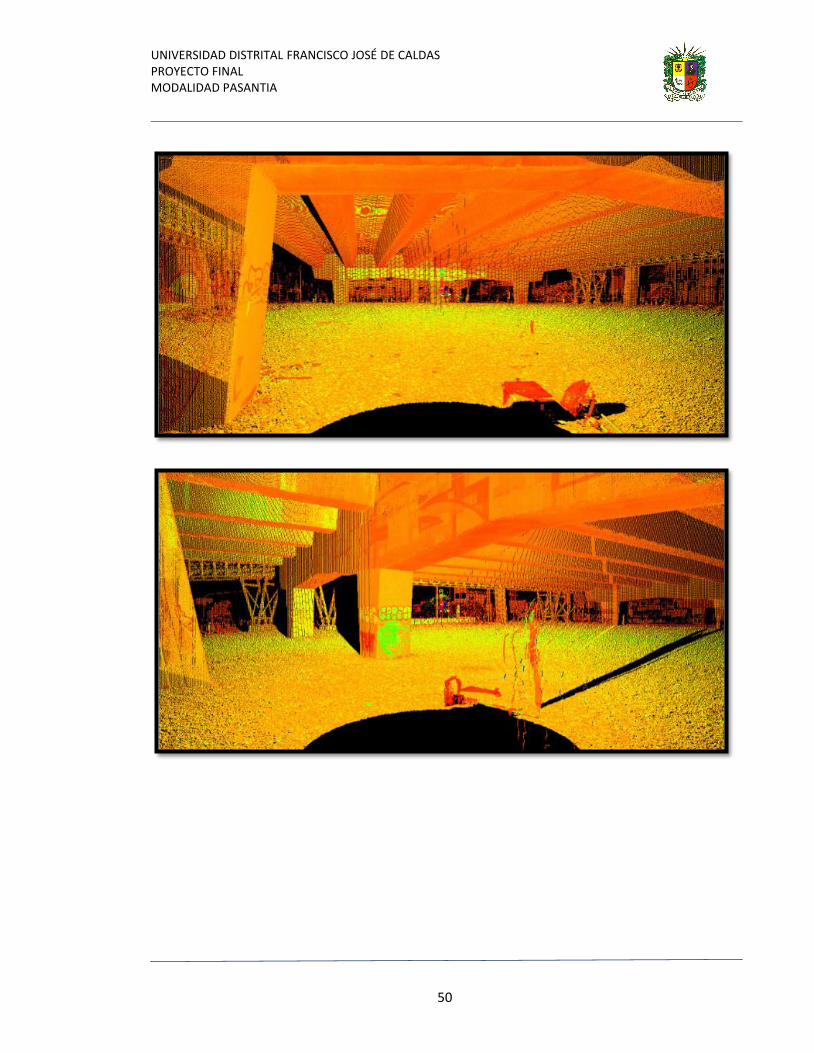
55
Ilustración 18 Escenas panorámicas del escaneo
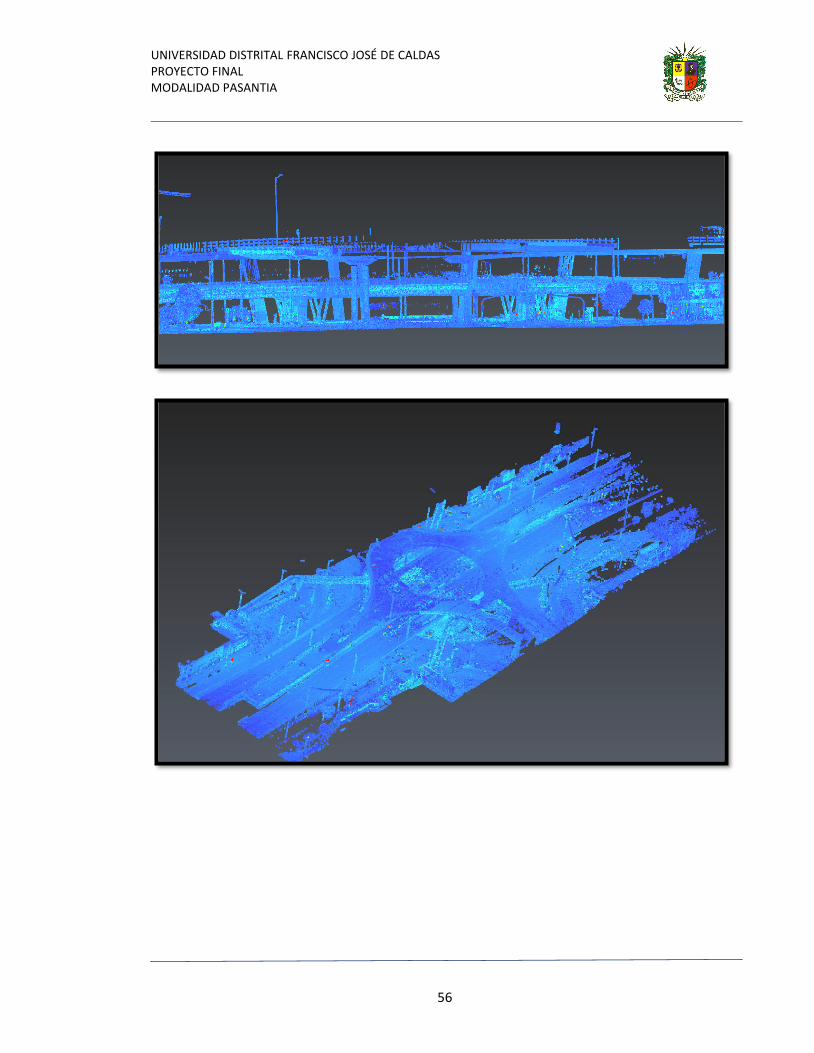
Después de tener las escenas del escáner laser se procede hacer la correlación de
elementos uniendo todas las escenas para formar una nube de puntos
tridimensional con el software Cyclone como se muestra en las siguientes imágenes
de resultados.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
56

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
57
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
58
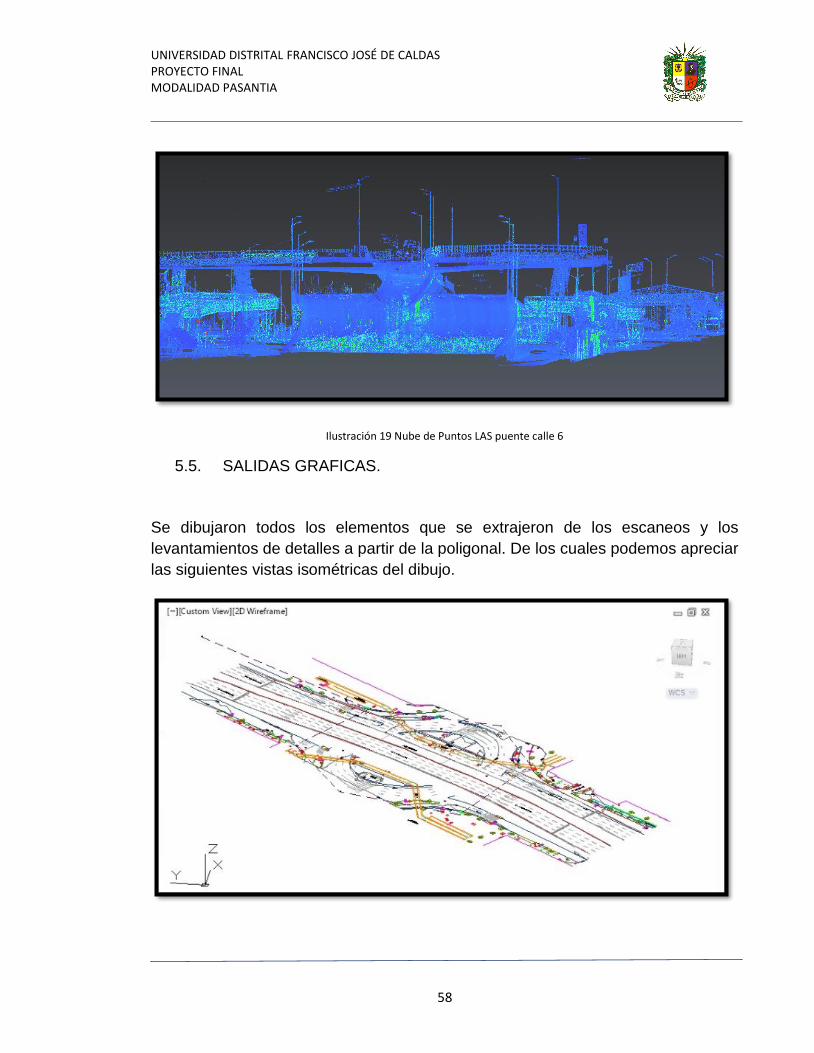
Ilustración 19 Nube de Puntos LAS puente calle 6
5.5. SALIDAS GRAFICAS.
Se dibujaron todos los elementos que se extrajeron de los escaneos y los
levantamientos de detalles a partir de la poligonal. De los cuales podemos apreciar
las siguientes vistas isométricas del dibujo.

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
59
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
60
Ilustración 20 Salidas graficas CAD Planta General
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
61
Ilustración 21 Perfiles Estructurales del segundo nivel puente calle 6
5.6. RESULTADOS ESCANEO GPR.
La determinación de las redes secas de servicios públicos como,
acueducto, línea de gas, redes de comunicación y demás redes que se
encuentran en la zona de influencia del puente se detectaron con este
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
62
sistema a continuación se muestra los resultados de las redes
determinadas mediante el análisis
Se realizaron 11 perfiles GPR en ambos costados del puente vehicular, cinco en el
costado Norte y seis en el costado Sur, dentro de las redes encontradas se
encuentra principalmente la línea de tubería de acueducto, así como también redes
de energía y redes de telefonía.
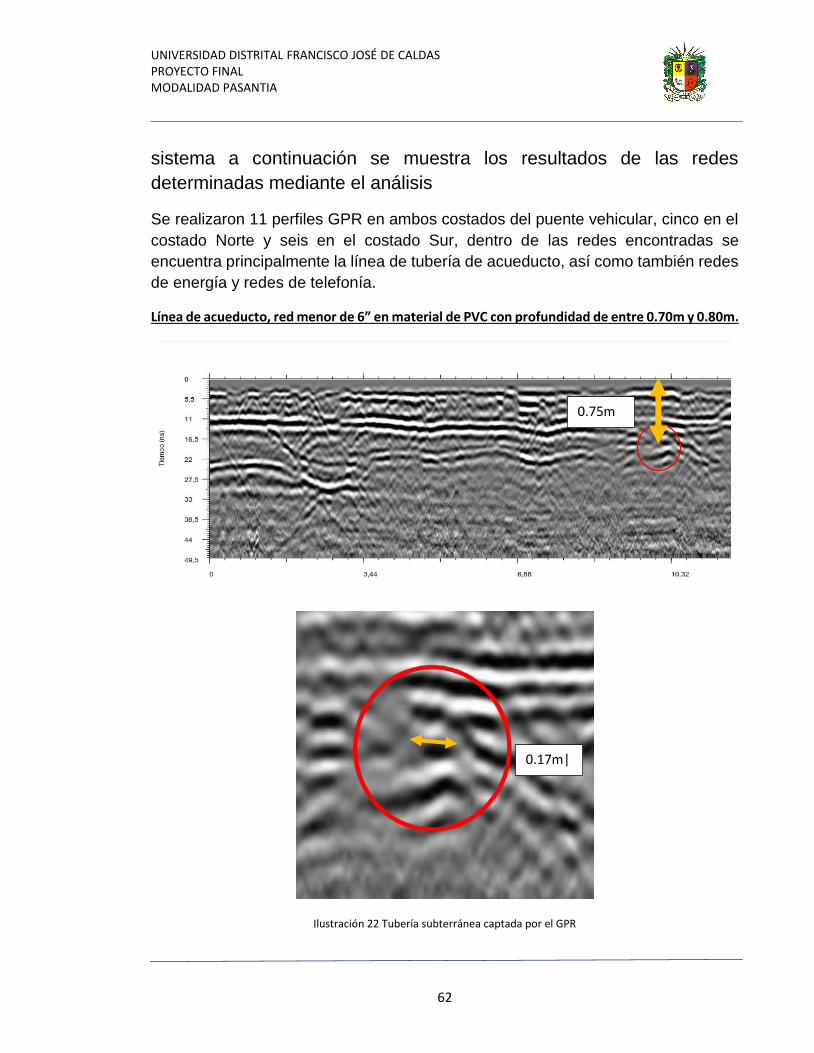
Línea de acueducto, red menor de 6” en material de PVC con profundidad de entre 0.70m y 0.80m.
Ilustración 22 Tubería subterránea captada por el GPR
0.75m
0.17m|

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
63
El diámetro, como se menciona anteriormente es determinado con las trazas de
GPR en campo y verificado con los perfiles procesados según la escala del perfil,
en el caso de la red de acueducto la distancia medida en campo es de 0.17m lo cual
se asume como una tubería de 6”.
Se realizaron perfiles de GPR en ambos costados de los puentes vehiculares en
cuestión, encontrando redes de acueducto de red menor y red matriz, redes de
energía, redes de telefonía y en algún caso específico. A continuación, se presentan
las conexiones de acueducto encontradas y los criterios utilizados para su
determinación.
La existencia de la tubería se determina por la geometría de la onda marcada en el
perfil, se logra identificar un registro completo sin rastro de interferencia en la parte
superior o inferior de la misma. El diámetro de la tubería se determina pasando el
GPR completamente por la zona donde se detectó la presencia de la tubería,
posteriormente se devuelve el equipo hasta donde se marca el inicio de la onda y
desde este punto se mide la distancia que la onda abarca, esta distancia debe ser
comparada con los diámetros comúnmente utilizados en metros y se asigna el valor
más cercano.
La profundidad de la red es medida de igual manera en campo hasta la zona más
fuerte y estable de la onda, esta distancia puede ser corroborada en los archivos
pos procesados en caso de presentarse alguna duda con respecto a la información
capturada en campo.
A continuación, se mostrará los perfiles del puente de la calle 6 con NQS

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
64
PERFIL 1
PERFIL 2
PErfil
PERFIL 3
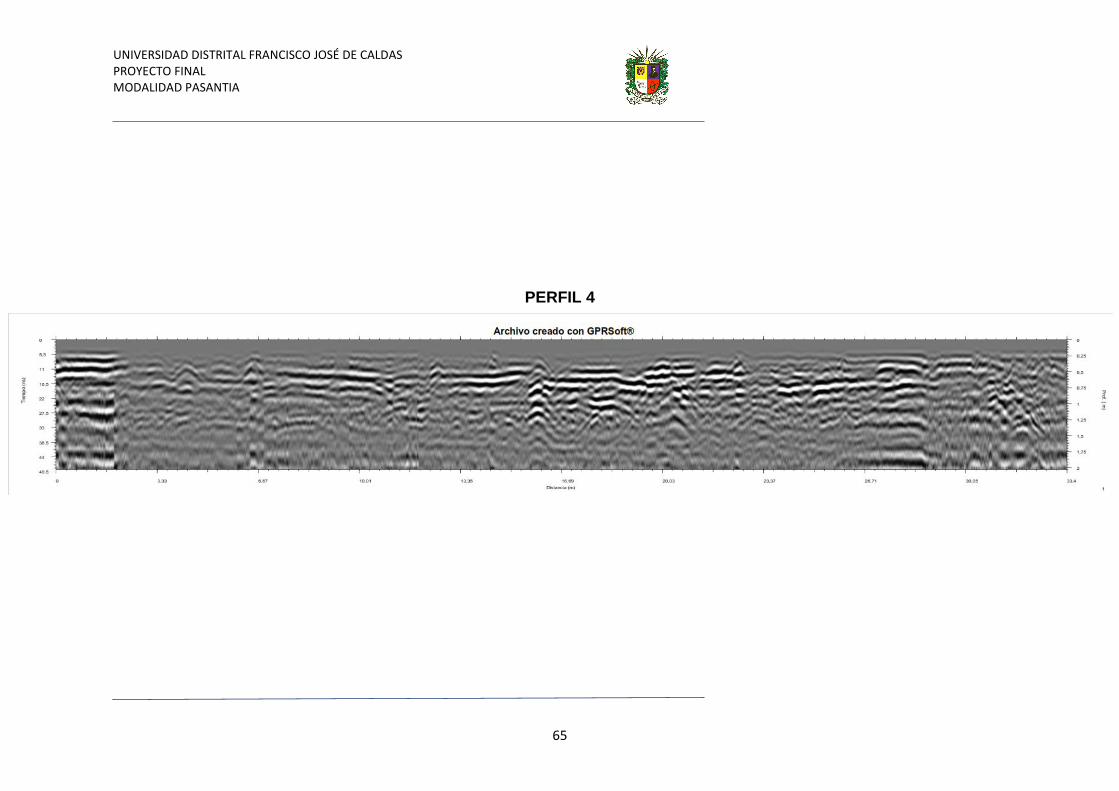
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
65
PERFIL 4
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
66
6. REGISTRO FOTOGRÁFICO.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
67

UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
68
7. CONCLUSIONES.
La actualización topográfica realizada para el puente de la NQS con Calle 6 y su
entorno inmediato permite considerar las condiciones, el estado actual de la
estructura y sus componentes, atendiendo a los aspectos físicos y dimensionales
de la estructura, las preexistencias y plasmarlas en planos bidimensionales que
expresan de manera clara su configuración.
Los métodos y tecnologías empleadas para la obtención de información topográfica
primaria en el puente de la NQS con calle 6 ofrecen un nivel de detalle y precisión
suficiente que permite construir modelaciones a partir de la nube de puntos
haciendo evidentes las deformaciones de los elementos estructurales presentes en
la actualidad.
Para el proyecto del estudio topográfico previo para la realización de estudios y
diseños de diagnóstico estructural y actualización sísmica como pasantes se pudo
estar en cada etapa del proyecto participando activamente en las labores tanto en
campo y en oficina, desde la primera etapa de georreferenciación hasta la
culminación con los planos estructurales en CAD, en este proyecto como en
cualquier otro tubo complicaciones tanto en planeación como en ejecución pero con
las habilidades y conocimientos obtenidos en toda la carrera se pudo dar solución
adecuada a estos casos.
Todos los puentes mencionados en el proyecto se trabajaron de la misma manera
con los mismos resultados variando las estructuras obtenidas con los diferentes
estudios, pero se enfatizó más en el puente de la calle 6 donde se tuvo mayor
participación, en este puente de 3 niveles se tubo toda la información estructural
como lo son riostras, columnas, bajo puente y demás información estructural qu8e
el cliente requería para hacer el diagnostico estructural.
El manejo de equipos y software nuevos para nosotros como pasantes nos refuerza
todo lo aprendido en la carrera además que se pudo aportar nuevas maneras de
trabajo la cual la empresa GeoScan Ingeniería SAS nos dio apoyo para ejecutarlas.
El procedimiento del escáner y análisis GPR fue un conocimiento nuevo adquirido
debido a que se nos permitió participar en este proceso tanto en campo como en
oficina.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS PROYECTO FINAL MODALIDAD PASANTIA
69
8. BIBLIOGRAFÍA.
academia.edu. (2010). www.academia.edu. Obtenido de
https://www.academia.edu/6949235/NIVELACI%C3%93N_TOPOGR%C3%81FICA
geospatial. (s.f.). www.geospatial.com.co. Obtenido de
http://www.geospatial.com.co/servicios/tecnologia-lidar.html
Guitierrez, J. M. (2004). cartesia.org. Obtenido de
http://cartesia.org/geodoc/topcart2004/conferencias/23.pdf
IGAC. (2004). www.igac.gov.co. Obtenido de
https://www.igac.gov.co/sites/igac.gov.co/files/procesamiento_de_informacion.pdf
Lapazaran, J. J. (2004). oa.upm.es. Obtenido de http://oa.upm.es/223/1/09200443.pdf
LEICA. (s.f.). leica-geosystems.com. Obtenido de https://leica-geosystems.com/es-
ES/products/laser-scanners
MEXICO, U. N. (2008). www.ptolomeo.unam.mx. Obtenido de
http://www.ptolomeo.unam.mx:8080/xmlui/bitstream/handle/132.248.52.100/8071/Tesi
s_Completa.pdf?sequence=1
realgroupinteractive. (2008). www.realgroupinteractive.com. Obtenido de
http://www.realgroupinteractive.com/?gclid=Cj0KCQjwyoHlBRCNARIsAFjKJ6CpqqEWJ2Q8
tFrj2PHjNZrBkAcjaB26evyomrNfdjtPPazYHZL3qrAaAuxzEALw_wcB
Round-Radar. (2018). www.ground-radar-gpr.com. Obtenido de http://www.ground-radar-
gpr.com/radar-de-penetracion-de-suelo/es/
Recommended