Embed Size (px)
Citation preview
Equipo de los rudos
1er avance

ANTECEDENTES. Primeras ideas. Robot podadora, robot fresadora para
pasto.
ELECCIÓN FINAL. Por último se decidió construir un robot bar tender
que va a tener menos complejidad por el hecho que va a ser un robot que no necesita movilidad sobre una superficie.
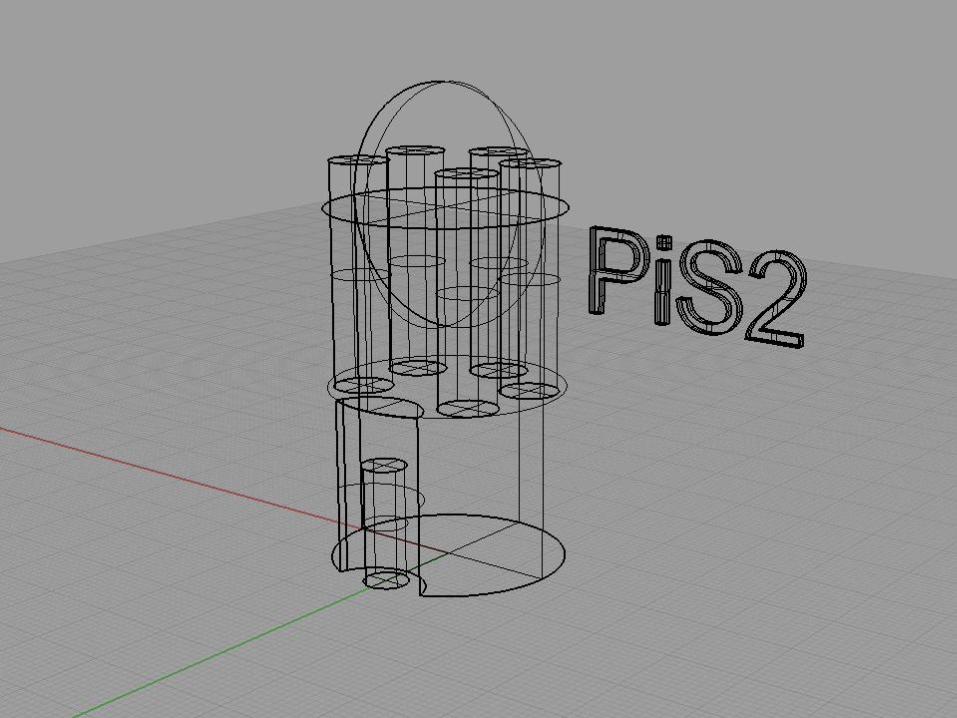
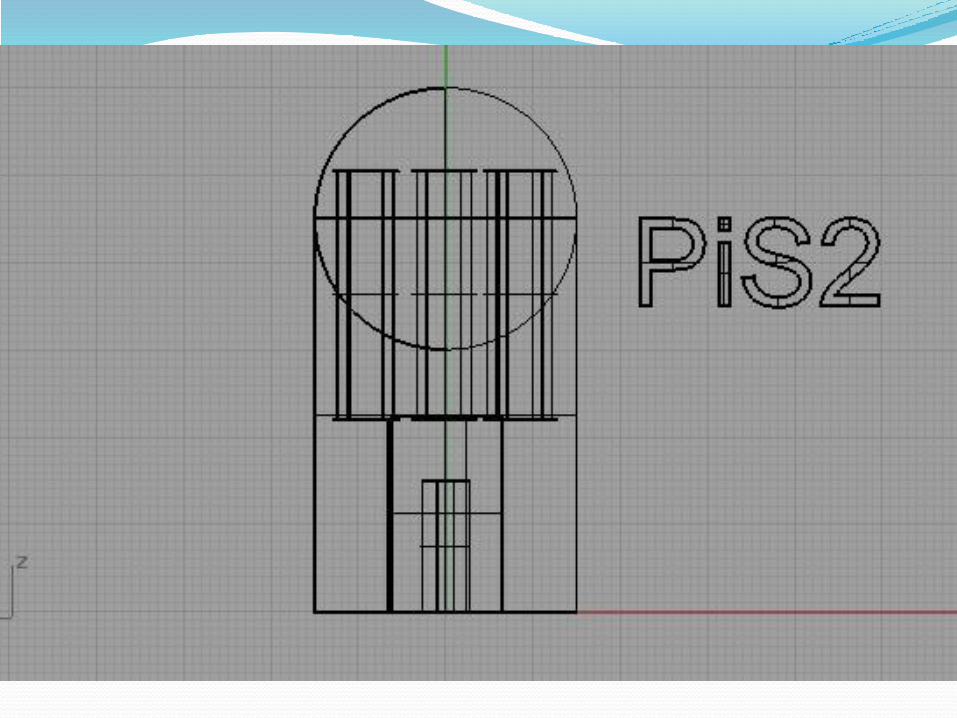
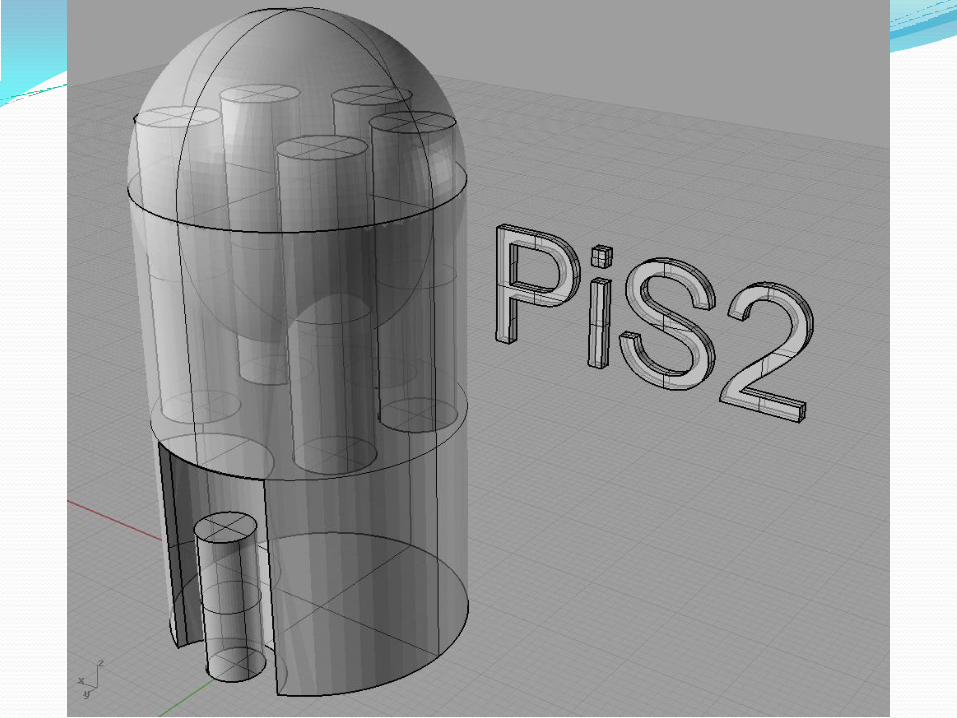
LAS MEZCLAS.

Válvula probada.
MotivosVentajas Desventajas
Ya se a utilizado anteriormente.
Tiene un fácil uso
No requiere un circuito complicado para interfaz de potencia
Sólo tenemos una
Tiene poco flujo
Dicho flujo no es constante
No tiene precisión
Tamaño
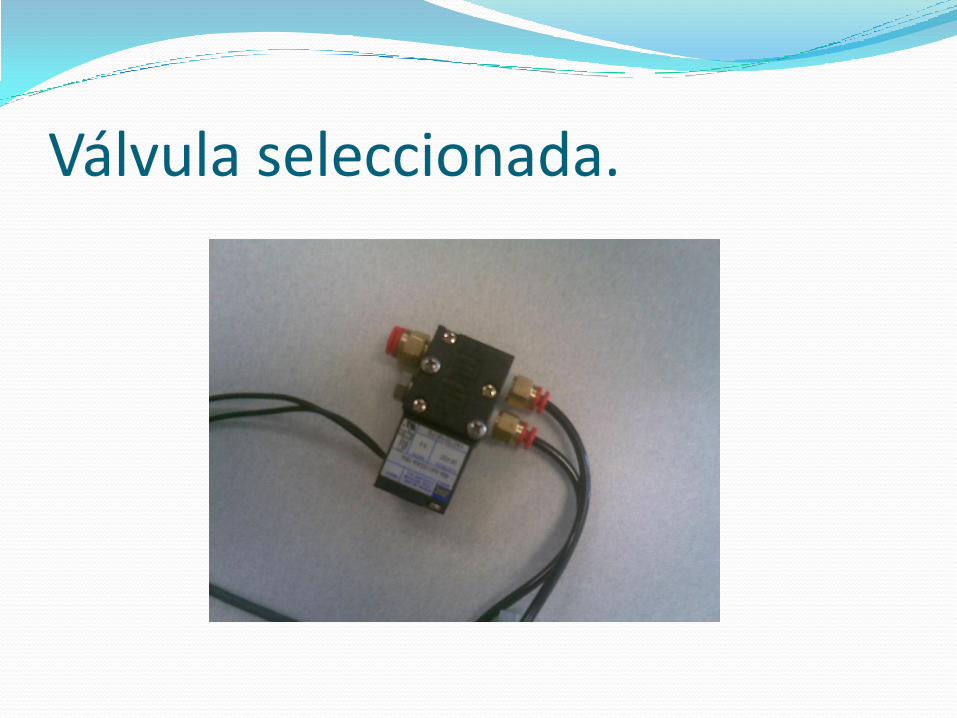
Válvula seleccionada.
Sensores. Infrarojo. Al principio se consiguió un sensor digital de
marca Honeywell que sensa la distancia, pero debido a la poca estabilidad que van a tener los líquidos que se van a servir, el sensor nos regresaba datos erroneos, por lo cual se decidó usar un sensor ultrasónico.
Sensores. Ultrasónico. El sensor o sensores que se usarán para
este robot bar tender van a ser ultrasónicos que nos indicarán cuando la bebida esté servida. Y nos sensará la cantidad exacta de ingredientes.
Sensor OMRON E4A-3K
Sensor 134491


Microcontrolador.Kit Freescale DEMOQE128 .
INTERFACE CON EL USUARIO. Arduino.