Embed Size (px)
Citation preview

CAPÍTULO 1
INTRODUCCIÓN 1.1 DEFINICIÓN DE VIBRACIÓN Según la norma ISO 2041:2009 en relación con la terminología de las vibraciones, se establece que La vibración es toda variación en el tiempo, de una magnitud que describe el movimiento o la posición de un
sistema mecánico, cuando esta magnitud es alternativamente mayor o menor que cierto valor promedio de
referencia. Las vibraciones ocurren en muchos sistemas mecánicos y estructurales. Si no es controlada, la vibración puede conducir a graves problemas. Las vibraciones en máquinas herramientas pueden producir un maquinado inadecuado de las partes y disminuir la eficiencia del proceso. La vibración de la máquina herramienta, además de afectar la exactitud dimensional y el acabado de un producto, puede causar rápidamente fatiga, desgaste y ruptura de la herramienta. Las estructuras pueden fallar debido a esfuerzos dinámicos grandes desarrolladas en un temblor o por vibraciones inducidas por el viento. Una hélice desbalanceada de un helicóptero al girar a altas velocidades puede inducir la falla de la hélice y la catástrofe del helicóptero. Se encuentran aplicaciones de las vibraciones en muchas ramas de la ingeniería tales como la mecánica, civil, manufactura, aeronáutica, aeroespacial y la eléctrica. Usualmente, se requiere un modelo para analizar el problema de la vibración en un sistema de ingeniería. Los modelos son útiles en el proceso de diseño y desarrollo de un sistema de ingeniería para un buen funcionamiento con respecto a las vibraciones. El monitorio de las vibraciones, su ensayo, y experimentación son importantes en el diseño, la implementación, mantenimiento, y reparación de un sistema de ingeniería. La ciencia e ingeniería de las vibraciones cubren dos amplias categorías de aplicación:
1. La generación de las formas y cantidades requeridas de vibración deseada 2. La eliminación o supresión de vibraciones indeseadas
Tipos de vibración deseada incluyen los generados por instrumentos musicales, equipos utilizados en terapia física y aplicaciones medicas, vibradores utilizados en mezcladores, alimentadores de partes, removedores de material como taladros y pulidoras. El alineamiento de productos para procesamiento industrial puede ser realizado mediante bandas vibratorias. Tipos de vibración indeseadas y perjudiciales incluyen el movimiento estructural producido por terremotos, la interacción dinámica entre los vehículos y puentes o carriles, el ruido generado por los equipos de construcción, la vibración transmitida por maquinaría al bastidor o al medio, y el daño, el malfuncionamiento, y falla debido a cargas dinámicas, movimiento inaceptable, y fatiga causada por la vibración. La reducción de los niveles de vibración puede resultar en reducción del ruido y mejorar el medioambiente laboral, el mantenimiento de altos niveles de funcionamiento y eficiencia de la producción, mejorar el confort laboral o de los usuarios, y prolongar la vida útil de la maquinaría industrial. Se diseñan sistemas de suspensión del vehículo para garantizar condiciones de confort de los pasajeros cuando el vehículo viaja por terrenos bruscos. Se utilizan aisladores de vibración para proteger estructuras de fuerzas excesivas desarrolladas en la operación de maquinaría rotativa. Existen situaciones en que la vibración de una fuente, afecta a un sistema perjudicialmente sin que pueda ser eliminada la vibración. Existen varios métodos para el control de la vibración:
1) Aislar el sistema o la fuente de forma que la vibración no se transmita desde la fuente al sistema. 2) Modificar el sistema mediante la variación de la frecuencia natural. Este tipo de solución se utiliza
cuando se presenta el fenómeno de resonancia, fenómeno en el que la frecuencia natural del sistema coincide con la frecuencia de la vibración de la fuente.

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.2
3) Diseñar un absorbedor, se utiliza en los casos en que la frecuencia de la vibración es variable o no es económico el cambio de la frecuencia natural del sistema.
En la Figura 1.1 se presentan diferentes modelos comerciales de aisladores de vibración.
Figura 1.1 Tipos de aisladores de vibración
1.2 ANÁLISIS DE LA SEÑAL DE VIBRACIÓN Para entender, y diagnosticar correctamente las características de la vibración, es esencial entender la física de la dinámica del movimiento. Esto incluye la influencia de la rigidez y el amortiguamiento sobre la frecuencia de una masa oscilante, así como la interrelación entre la frecuencia, la fase, el desplazamiento, la velocidad, y la aceleración de un cuerpo en movimiento. La vibración se produce por diferentes factores, algunos de ellos son: desbalanceo de un rotor, desalinamiento en el montaje, problemas de resonancia o velocidades críticas, defectos de los elementos, entre otros. Estos factores producen una vibración que se transmite en toda la máquina. Muchos problemas mecánicos se reconocen inicialmente por cambios en las amplitudes de la vibración en la maquinaría. Como la maquinaría industrial, en general, es de tipo rotativo, las vibraciones originadas son del

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.3
tipo periódico y sus componentes de frecuencia serán los principales indicadores para la identificación de las causas y su posterior corrección. La clave del análisis de vibraciones es buscar las periodicidades de las fuerzas que se generan, ya que la vibración es causada por una fuerza que está variando en magnitud o dirección, o punto de aplicación. Las características de desplazamiento, velocidad y aceleración de la vibración son medidas para determinar la severidad de la vibración, y son referenciadas como la amplitud de la vibración. En términos de la operación de la máquina, la amplitud de la vibración es el primer indicador del estado de la condición de operación de la máquina. Generalmente, una mayor amplitud de la vibración corresponde a mayores niveles de los defectos en la máquina. La relación entre la aceleración, velocidad y desplazamiento con respecto a la amplitud de la vibración y la salud de la máquina, redefine la medición y la técnica de análisis de los datos que debe utilizarse. Movimientos inferiores a los 10 Hz, 600 min-1, produce muy bajo vibración en términos de la aceleración, vibración moderada en términos de la velocidad, y gran vibración relativa en términos del desplazamiento, ver Figura 1.2. Por lo que el desplazamiento es utilizado en este rango.
Figura 1.2 Relación entre el desplazamiento, velocidad, y aceleración a velocidad constante
Para frecuencias altas, el valor de la aceleración tiende a ser más significativo que los de velocidad y desplazamiento. Por lo tanto, para frecuencias superiores a 1 kHz, 60.000 min-1, la medición preferida para la vibración es la aceleración. Es generalmente aceptado que entre los 10 Hz y los 1000 Hz, la velocidad da una buena indicación de la severidad de la vibración, y por encima de 1 kHz la aceleración es el único indicador bueno. Mediante el análisis de vibraciones se extraen el máximo de información relevante que ella posee. Para esto existen diferentes técnicas de análisis tanto en el dominio tiempo como en el dominio frecuencia, las cuales tienen sus propias ventajas para algunas aplicaciones en particular. Para el diagnóstico de las vibraciones se utilizan diferentes herramientas en el proceso de medición, como por ejemplo:
1) Análisis de la forma de onda 2) Análisis de la fase entre la fuente y la señal de la vibración 3) Análisis de frecuencia 4) Análisis de orbita
Estos análisis, con su correspondiente interpretación, son una herramienta poderosa en el diagnóstico de las vibraciones, lo cual permite determinar la fuente de la vibración y la posible corrección del problema o el control de la vibración si la primera no es posible.

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.4
El análisis de la forma de la vibración en el tiempo a veces puede proveer información complementaria al análisis espectral. Este análisis es adecuado para reconocer los siguientes tipos de problemas como el impacto, el rozamiento, modulaciones de la amplitud y fase, problemas en ruedas dentadas y rodamientos, entre otros. La fase es la posición relativa de un objeto vibrando con respecto a otro para un instante particular del tiempo. La Figura 1.3 muestra dos cuerpos que vibran con una diferencia de fase de 90°. La fase también puede ser dada con respecto a un cuerpo fijo. Utilizando el límite superior del movimiento la fase puede ser expresada en grados.
Figura 1.3 Diferencia de fase entre dos cuerpos
Se puede definir la diferencia de fase entre dos vibraciones de igual frecuencia como la diferencia en tiempo o en grados con que ellas llegan a sus valores máximos, mínimos o cero. El análisis de diferencias de fase a la velocidad de giro de la máquina entre las vibraciones horizontal y vertical o entre las vibraciones axiales de los diferentes descansos del sistema motor máquina, permite determinar los movimientos relativos entre ellos, y diferenciar entre problemas que generan vibraciones a frecuencia 1x rpm: - Desbalanceamiento - Desalineamiento - Eje doblado - Resonancia - Poleas excéntricas o desalineadas. La esencia del análisis espectral es descomponer la señal vibratoria en el dominio del tiempo en sus componentes espectrales en frecuencia. Esto permite, en el caso de las máquinas, correlacionar las vibraciones medidas generalmente en sus descansos, con las fuerzas que actúan dentro de ella. En la Figura 1.4 se representa la señal de la vibración horizontal tomado en un modelo de análisis de balanceo del Laboratorio de Vibraciones de la Universidad Tecnológica de Pereira, con el motor operando a 1800 min-1. Se observa claramente que la señal es una función periódica. El análisis de vibraciones, se basa en el hecho que en muchos casos es posible relacionar las frecuencias de vibración con el problema específico encontrado, mientras que la amplitud de la misma da una indicación de la severidad del problema. Existen procedimientos matemáticos para obtener la descomposición de esta función periódica en funciones armónicas de diferente frecuencia y amplitud. El procedimiento más implementado en la transformada rápida de Fourier, FFT por sus siglas en inglés. En la Figura 1.5 se presenta el espectro de frecuencia de la señal mostrada en la Figura 1.4. Es de resaltar que en la señal tomada, se tiene componentes a la velocidad de operación de la máquina y varios múltiplos de esta velocidad. En el apartado 1.4 se profundizará sobre la interpretación en la frecuencia de una señal. Existe mucha literatura sobre la transformada rápida de Fourier que se puede consultar en textos de manejo e interpretación de señales o consultarlo en internet.

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.5
Figura 1.4 Señal de vibración en el tiempo
Figura 1.5 Espectro de frecuencia de la señal mostrada en la Figura 1.4
La órbita representa el movimiento del centro del eje del rotor en un plano perpendicular a su eje. Se obtiene combinando los desplazamientos vibratorios captados por dos sensores ubicados relativamente entre ellos a 90°. Una gran cantidad de problemas puede ser identificado del análisis de la orbita del eje, observando la posición del centro en relación a la posición del rodamiento. En el análisis de orbita se utilizan sensores de no contacto, generalmente de corrientes parásitas, para medir el movimiento del eje dentro del rodamiento. Las figuras del movimiento del eje son referidas como patrones de Lissajous. En el caso que el movimiento relativo del eje sea no apreciable, se observaría un punto en el patrón. Una condición de desbalanceo, puede generar una figura circular en la que las amplitudes horizontal y vertical son iguales. Un patrón esférico se presenta sí la amplitud en una dirección es mayor, la que puede ser asociado a una excentricidad del rodamiento. Una figura en forma de ocho es el resultado de un movimiento del eje predominante vertical pero con una fuerte componente al doble de la frecuencia de operación puede ser debida a un problema de desalineación. Una figura errática puede ser debida a un problema de fricción o turbulencia.

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.6
Figura 1.6 Vista lateral del modulo: 1) sensores de proximidad, 2) bases magnéticas, 3) actuador neumático,
4) driver del sensor de proximidad
a)
0 0,1 0,2 0,3
7.80
7,85
7,90
7,95
8,00
8,05
8,10
8,15
x [mm]
t [s]
10,20
10,25
10,30
10,35
10,40
10,45
0 0,1 0,2 0,3
y [mm]
t [s]
b)
7.80 7.85 7.90 7.95 8.00 8.05 8.1010.20
10.25
10.30
10.35
10.40
10.50
10.45
Desplazamiento horizotal [mm]
Des
pla
zam
ien
tov
erti
cal
[mm
]
Figura 1.7 Señales obtenidas en el módulo de rodamiento: a) Señal de los sensores de proximidad, b) análisis de órbita

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.7
En la Figura 1.6 se muestra el montaje realizado en el módulo de rodamientos del Laboratorio de Vibraciones en el que se tienen dos sensores de proximidad para medir el desplazamiento horizontal y vertical del extremo libre del eje. En la Figura 1.7.a se muestran las señales del desplazamiento horizontal y vertical del eje. En la Figura 1.7.b se muestra el movimiento del eje mediante del análisis de orbita tomando señales de los sensores de proximidad durante 0,6 segundos. Se observa que existe una tendencia del eje en repetir la órbita. Actualmente el análisis de vibraciones se utiliza como técnica de mantenimiento predictivo y como una herramienta de respaldo para las decisiones de mantenimiento de la maquinaria. La ocurrencia de fallas en las máquinas es indicada por un incremento del nivel de vibraciones de la misma. Al medir y analizar las vibraciones de una máquina, es posible determinar la naturaleza y la severidad del defecto, y por lo tanto predecir el fallo de la misma. La señal de vibración global de una máquina se ve afectada por muchos componentes y estructuras que pueden estar acoplados. Sin embargo, los defectos mecánicos producen vibraciones características a diferentes frecuencias, y pueden ser relacionados con fallos específicos de la máquina. Al analizar los espectros de frecuencia contra tiempo se pueden detectar los defectos y la naturaleza de los componentes causantes del problema. 1.3 TIPOS DE VIBRACIÓN Las vibraciones se pueden clasificar dependiendo de la forma que se adiciona energía al sistema:
1) Vibración libre 2) Vibración forzada 3) Vibración autoexcitada
En la vibración libre, el sistema recibe una perturbación inicial que produce un desplazamiento de la posición de equilibrio o una velocidad inicial. El sistema vibra libremente sin que existan fuerzas externas, pero exista la presencia de energía cinética o elástica en el sistema. Las vibraciones libres o naturales son manifestación del comportamiento oscilatorio en sistemas mecánicos, como resultado del intercambio repetitivo de las energías potencial y cinética entre los componentes del sistema. La respuesta oscilatoria se encuentra también presente en sistemas diferentes a los mecánicos tales como los eléctricos, neumáticos e hidráulicos, debido al intercambio de dos tipos de energía entre los componentes del sistema. Algunos sistemas tienen fuerte presencia de mecanismos disipadores de energía que atenúan la energía inicial antes de completar un simple ciclo de oscilación. La disipación es realizada por amortiguamiento o fricción en los sistemas mecánicos, y resistencias en los sistemas eléctricos. En los sistemas mecánicos, el amortiguamiento ocurre como resultado de la fricción entre los cuerpos en movimiento o entre los cuerpos en movimiento y el medio externo (por ejemplo, rugosidad superficial, aire, fluidos). El amortiguamiento convierte la energía mecánica de un sistema vibrando, en otro tipo de energía como calor o ruido. La presencia de amortiguamiento produce el decaimiento de la amplitud de la vibración libre. En la vibración forzada existe una fuerza actuando sobre el sistema, la cual generalmente es una fuerza periódica. Por su gran aplicación, se estudia la respuesta a una fuerza armónica. Si la frecuencia de la fuerza coincide o es cercana a la frecuencia natural del sistema, la respuesta del sistema comienza a incrementar significativamente; este fenómeno se denomina como resonancia. El control de la vibración es una de los aspectos principales en el diseño de estructuras y máquinas. Se puede implementar intencionalmente amortiguamiento en el sistema para eliminar la resonancia. Ejemplos de problemas de vibración forzada son masas desbalanceadas, desalinamiento en los acoples, eje doblado, rotor excéntrico, soltura mecánica, excitación eléctrica, excitación externa, problemas en ruedas dentadas, poleas, y rodamientos. Los problemas de vibración forzada generalmente son resueltos removiendo o reduciendo la fuerza conductora o excitadora. Estos tipos de problemas son típicamente más fáciles de identificar y resolver que los problemas de vibración auto−excitada. La vibración auto−excitada se presenta cuando en el sistema surgen mecanismos que adicionan energía al sistema mientras ocurre la vibración. La vibración se sostiene, luego es amplificada hasta alcanzar niveles

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.8
peligrosos. Ejemplos de vibración auto−excitada incluyen casos como el batido o latigazo de aceite, fricción interna, resonancia estructural, resonancia de rotores, resonancia acústica, excitación aerodinámica, excitación hidrodinámica. Este tipo de problemas requieren modificaciones físicas de la maquinaría. 1.4 LAS VBRACIONES EN LAS MÁQUINAS La vibración en una máquina es una perturbación que debe ser corregida y son un síntoma del estado de la máquina o de la instalación. Desde el punto de vista de la perturbación, existen normas como la ISO 10816 que establecen condiciones y procedimientos para la medición y evaluación de la vibración en maquinaría, medidas externamente sobre partes no rotativas o sobre los soportes de los rodamientos. La norma ISO 10816 – 1995 define para un grupo específico de máquinas unos límites típicos de zonas de evaluación que dependen del valor rms de la velocidad de la vibración cuando operan dentro de un margen de frecuencia denominado banda frecuencial. La tabla 1 muestra el contenido de la norma.
Tabla 1.1 Criterio provisional de vibración para un grupo específico de máquinas según la norma ISO 10816 - 1995
Velocidad de vibración
valor eficaz mm/s
Clase I
Clase II
Clase III
Clase IV
0,28 Normal
Normal Normal
Normal
0,45 0,71 1,12
Admisible 1,8
Admisible 2,8
Límite Admisible 4,5
Límite Admisible 7,1
No permisible
Límite 11,2
No permisible Límite
18 No permisible 28
No permisible 45
A continuación se presenta la clasificación de las máquinas según esta norma. Clase I: Componentes individuales de máquinas i motores, íntegramente conectado a la máquina completa, con condiciones normales de operación, motores de potencia menor a 15 kW. Clase II: Máquinas de dimensión mediana, motores entre 15 – 300 kW sin cimentación especial; máquinas hasta 300 kW con soporte especial. Clase III: Máquinas grandes con inercias giratorias instaladas en cimientos rígidos y pesos que son relativamente rígidos en la dirección de la medición de la vibración. Clase IV: Máquinas grandes de 10 MW que operan a velocidades superiores a la velocidad crítica o a la frecuencia natural. En la norma ISO 10816 - 1995 se propone que los límites de la zona de evaluación sean constantes en una banda central de frecuencias y en los extremos se modifiquen para disminuir en las frecuencias bajas y altas. En la Figura 1.8 se presenta la forma general de los niveles de vibración en las zonas de evaluación, según la norma ISO 10816 – 1995
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.9
Zona B
Zona A
Zona C
Zona D
f1 fx fy f2
f [Hz]
vrms
Figura 1.8 Forma general de niveles de vibración (norma ISO 10816 – 1995) 1.5 LA VIBRACIÓN EN ESTRUCTURAS Y EDIFICIOS
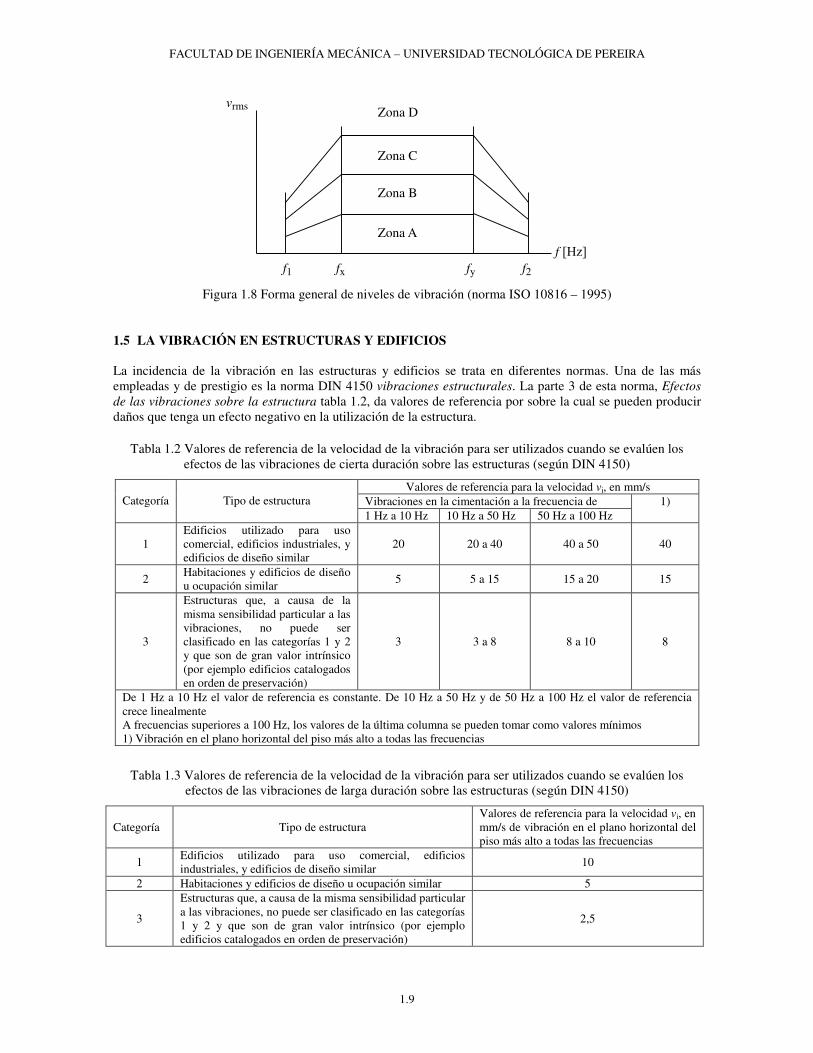
La incidencia de la vibración en las estructuras y edificios se trata en diferentes normas. Una de las más empleadas y de prestigio es la norma DIN 4150 vibraciones estructurales. La parte 3 de esta norma, Efectos
de las vibraciones sobre la estructura tabla 1.2, da valores de referencia por sobre la cual se pueden producir daños que tenga un efecto negativo en la utilización de la estructura.
Tabla 1.2 Valores de referencia de la velocidad de la vibración para ser utilizados cuando se evalúen los efectos de las vibraciones de cierta duración sobre las estructuras (según DIN 4150)
Categoría
Tipo de estructura
Valores de referencia para la velocidad vi, en mm/s Vibraciones en la cimentación a la frecuencia de 1) 1 Hz a 10 Hz 10 Hz a 50 Hz 50 Hz a 100 Hz
1 Edificios utilizado para uso comercial, edificios industriales, y edificios de diseño similar
20 20 a 40 40 a 50 40
2 Habitaciones y edificios de diseño u ocupación similar
5 5 a 15 15 a 20 15
3
Estructuras que, a causa de la misma sensibilidad particular a las vibraciones, no puede ser clasificado en las categorías 1 y 2 y que son de gran valor intrínsico (por ejemplo edificios catalogados en orden de preservación)
3 3 a 8 8 a 10 8
De 1 Hz a 10 Hz el valor de referencia es constante. De 10 Hz a 50 Hz y de 50 Hz a 100 Hz el valor de referencia crece linealmente A frecuencias superiores a 100 Hz, los valores de la última columna se pueden tomar como valores mínimos 1) Vibración en el plano horizontal del piso más alto a todas las frecuencias
Tabla 1.3 Valores de referencia de la velocidad de la vibración para ser utilizados cuando se evalúen los
efectos de las vibraciones de larga duración sobre las estructuras (según DIN 4150)
Categoría
Tipo de estructura
Valores de referencia para la velocidad vi, en mm/s de vibración en el plano horizontal del piso más alto a todas las frecuencias
1 Edificios utilizado para uso comercial, edificios industriales, y edificios de diseño similar
10
2 Habitaciones y edificios de diseño u ocupación similar 5
3
Estructuras que, a causa de la misma sensibilidad particular a las vibraciones, no puede ser clasificado en las categorías 1 y 2 y que son de gran valor intrínsico (por ejemplo edificios catalogados en orden de preservación)
2,5

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.10
1.6 LAS VIBRACIONES EN HUMANOS La norma más importante y ampliamente conocida es la norma ISO 2631: "Mechanical vibration and shock. Evaluation of human exposure to whole-body vibration. Part 1: General requirements", cuya primera edición fue publicada en 1972. La revisión más reciente corresponde a 1997. Este estándar define y da valores numéricos para los límites de exposición a los que puede estar sometido un ser humano. Estos límites establecen valores que permiten cuantificar diferentes efectos de las vibraciones sobre el individuo: - Daño en la salud o seguridad de las personas. - Disminución de la eficiencia en el trabajo. - Disminución del confort de la persona. Las quejas médicas incluyen dolor vertebragénico, deformaciones de la columna vertebral, fatiga, enfermedades de los músculos del esqueleto, desórdenes hemorroidales, etc. Esta norma utiliza para evaluar la severidad vibratoria la aceleración RMS entre 1 y 80 (Hz) medida en tres direcciones mutuamente ortogonales. Limita el nivel vibratorio de acuerdo con la frecuencia de la vibración. La manera que un movimiento oscilatorio afecta a la salud depende de la frecuencia, dirección y duración del movimiento de manera similar al efecto de la vibración sobre el confort.
Frecuencia (Hz) Frecuencia (Hz)
Ejes x, y
Eje z
a (ms-2 r.m.s.)a (ms-2 r.m.s.)
ISO 2631 (1985)
límites de exposición
BS 6841 (1987) 15 VDV
ISO 2631 (1985)
límites de exposición
BS 6841 (1987) 15 VDV
Figura 1.9 Comparación de la norma ISO 2631 (1985) y la norma británica 6841 (1987) 1.7 LAS VIBRACIONES COMO TÉCNICA DE MANTENIMIENTO Entre las diferentes técnicas de mantenimiento predictivo se encuentra las termografías, análisis de aceites, tintas penetrantes, vibraciones mecánicas, entre otras. El análisis de vibraciones mecánicas es una de las técnicas de mantenimiento preventivo más utilizada debido al menor costo en relación con las otras técnicas, a la posibilidad de efectuarlo sin necesidad de hacer una parada en el proceso de producción y gracias a sus buenos resultados en el diagnóstico de fallas en máquinas rotativas. En la mayoría de los casos un diagnóstico acertado de la falla está directamente relacionado con la experiencia del técnico en el análisis del espectro obtenido y con la agudeza de sus sentidos (visión, tacto, oído, olfato) en función de determinar las relaciones de la máquina con su entorno de trabajo y el entendimiento de los principios físicos y mecánicos que rigen el funcionamiento de la máquina. Un error en la interpretación del espectro de vibración generalmente conlleva el cambio inadecuado de piezas, pérdida de tiempo y en general la generación de gastos adicionales.

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.11
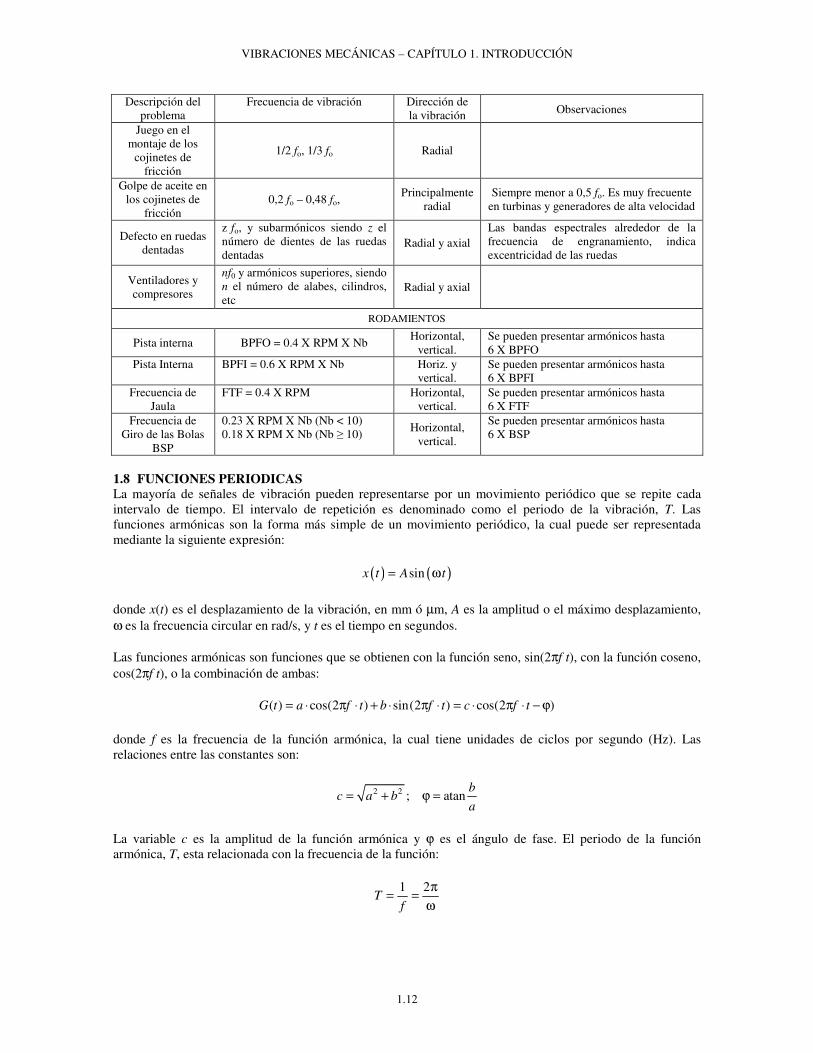
La medición y análisis de vibraciones se utiliza, en conjunto con otras técnicas, en todo tipo de industrias como método de diagnóstico de fallas y evaluación de la integridad de máquinas y estructuras. En el caso de los equipos rotatorios, la ventaja que presenta el análisis vibratorio con respecto a otras técnicas como tintas penetrantes, radiografía y ultrasonido, es que la evaluación se realiza durante la operación normal de la máquina, evitando con ello la pérdida en la producción que genera una detención. En el diagnóstico de fallas en vibraciones mecánicas las transformaciones de Fourier son el método tradicional de análisis, que presenta altos porcentajes de aciertos para fallas con componentes periódicos. Este tipo de análisis, debido a su deficiencia para tratar con señales no estacionarias, se ha venido complementando con variados métodos de procesamiento de señales. En general, las vibraciones en una máquina no son buenas: pueden causar desgaste, fisuras por fatiga, pérdida de efectividad de sellos, rotura de aislantes, ruido, etc. Pero al mismo tiempo las vibraciones son la mejor indicación de la condición mecánica de una máquina y pueden ser una herramienta de predicción muy sensible de la evolución de un defecto. Las fallas catastróficas en una maquinaria muchas veces son precedidas, a veces con meses de anticipación, por un cambio en las condiciones de vibración de la misma. Las señales de vibración de una máquina en operación contienen información sobre su condición de operación, así como una máquina en condiciones normales de operación tiene una señal característica, denominada firma de la vibración, una falla cambia esta firma en una forma bien definida. De esta forma, el análisis de vibración entrega información sobre las condiciones internas de operación de máquina sin tener que apagarla. La vibración de la máquina es medida en dos formas fundamentales: i) desplazamiento relativo del eje en sus rodamientos utilizando sensores de proximidad, y ii) el movimiento absoluto de la carcaza (generalmente en los rodamientos) utilizando un sensor de movimiento absoluto. Los sensores de proximidad pueden ser diseñados en la máquina y son utilizados en turbomáquinas de velocidades altas con rodamientos con película de aceite. Estos son utilizados para el monitoreo permanente de parámetros como el desplazamiento relativo pico a pico, y la órbita de onda (en el rodamiento) y son utilizados para proteger máquinas críticas para realizar una parada si se presenta una vibración excesiva. Debido a que las vibraciones representan un cambio entre la energía potencial (en la forma de energía elástica) y la energía cinética, la velocidad de la vibración es el parámetro más relacionado con el esfuerzo, y el parámetro utilizado para evaluar la severidad en la mayor de los criterios de vibración. Por la misma razón, un espectro de velocidad es usualmente más plano sobre un rango ancho de frecuencias. En comparación, el desplazamiento de la vibración tiene a sobredimensionar las frecuencias bajas, mientras que la aceleración tiene a sobredimensionar las frecuencias altas. La señal de aceleración puede ser en algunas ocasiones útil para determinar fallas, como en los elementos rodantes en rodamientos. En la Tabla 1.4 se presenta un listado de las frecuencias comúnmente encontradas en espectros de vibración de las máquinas, junto con las causas probables de los problemas asociados a las mismas.
Tabla 1.4 Frecuencias de vibración y origen probable de falla
Descripción del problema
Frecuencia de vibración Dirección de la vibración
Observaciones
Desbalanceo fo Radial Causa muy común de vibración en
máquinas. La amplitud es proporcional al desequilibrio
Desalinamiento fo, 2 fo, 3 fo Radial y axial
Causa principal de las vibraciones en máquinas, el desalineamiento puede ser angular o lineal o la combinación.
Elementos deteriorados de un
rodamiento
Vibraciones a muy altas frecuencias (>20 kHz)
relacionadas con la velocidad de los elementos rodantes
Radial y axial
VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.12
Descripción del problema
Frecuencia de vibración Dirección de la vibración
Observaciones
Juego en el montaje de los
cojinetes de fricción
1/2 fo, 1/3 fo Radial
Golpe de aceite en los cojinetes de
fricción 0,2 fo – 0,48 fo,
Principalmente radial
Siempre menor a 0,5 fo. Es muy frecuente en turbinas y generadores de alta velocidad
Defecto en ruedas dentadas
z fo, y subarmónicos siendo z el número de dientes de las ruedas dentadas
Radial y axial Las bandas espectrales alrededor de la frecuencia de engranamiento, indica excentricidad de las ruedas
Ventiladores y compresores
nf0 y armónicos superiores, siendo n el número de alabes, cilindros, etc
Radial y axial
RODAMIENTOS
Pista interna BPFO = 0.4 X RPM X Nb Horizontal,
vertical. Se pueden presentar armónicos hasta 6 X BPFO
Pista Interna BPFI = 0.6 X RPM X Nb Horiz. y vertical.
Se pueden presentar armónicos hasta 6 X BPFI
Frecuencia de Jaula
FTF = 0.4 X RPM Horizontal, vertical.
Se pueden presentar armónicos hasta 6 X FTF
Frecuencia de Giro de las Bolas
BSP
0.23 X RPM X Nb (Nb < 10) 0.18 X RPM X Nb (Nb ≥ 10)
Horizontal, vertical.
Se pueden presentar armónicos hasta 6 X BSP
1.8 FUNCIONES PERIODICAS La mayoría de señales de vibración pueden representarse por un movimiento periódico que se repite cada intervalo de tiempo. El intervalo de repetición es denominado como el periodo de la vibración, T. Las funciones armónicas son la forma más simple de un movimiento periódico, la cual puede ser representada mediante la siguiente expresión:
( ) ( )sinx t A t= ω
donde x(t) es el desplazamiento de la vibración, en mm ó µm, A es la amplitud o el máximo desplazamiento, ω es la frecuencia circular en rad/s, y t es el tiempo en segundos. Las funciones armónicas son funciones que se obtienen con la función seno, sin(2πf t), con la función coseno, cos(2πf t), o la combinación de ambas:
( ) cos(2 ) sin(2 ) cos(2 )G t a f t b f t c f t= ⋅ π ⋅ + ⋅ π ⋅ = ⋅ π ⋅ − ϕ
donde f es la frecuencia de la función armónica, la cual tiene unidades de ciclos por segundo (Hz). Las relaciones entre las constantes son:
2 2 ; atanb
c a ba
= + ϕ =
La variable c es la amplitud de la función armónica y ϕ es el ángulo de fase. El periodo de la función armónica, T, esta relacionada con la frecuencia de la función:
1 2T
f
π= =
ω
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.13
Una señal periódica, x(t), con periodo T y frecuencia f 1 = 1/T, (frecuencia fundamental) puede ser expresada por una suma de senos y cosenos mediante las series de Fourier. El físico y matemático francés Jean Fourier determinó que funciones no armónicas como las señales de vibración son la suma matemática de funciones armónicas simples:
( ) ( )01
1
( ) cos 2 sin 2 ;2 n n n n n
n
ax t a f t b f t f n f
∞
=
= + π + π = ⋅ ∑
Los coeficientes an y bn dependen de la señal periódica:
( ) ( )00 0 0
2 2 2( ) d ; cos 2 ( ) d ; sin 2 ( ) d ;
T T T
n n n na x t t a f t x t t b f t x t tT T T
= = π ⋅ = π ⋅∫ ∫ ∫
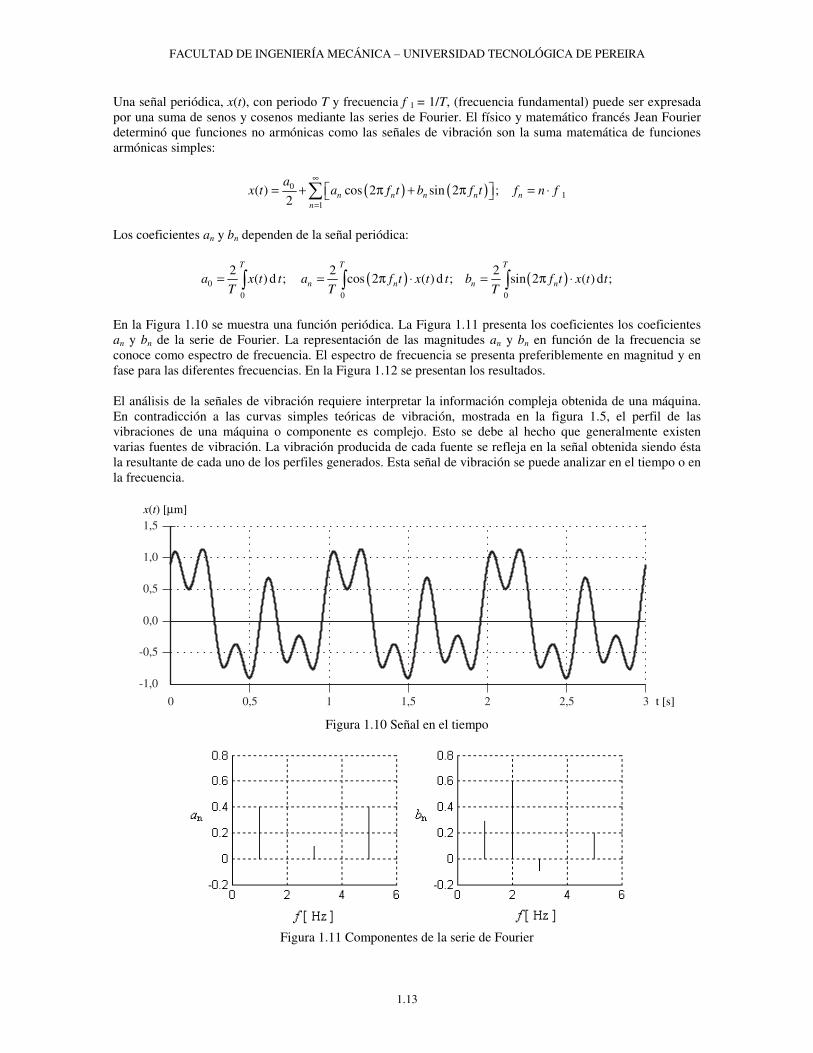
En la Figura 1.10 se muestra una función periódica. La Figura 1.11 presenta los coeficientes los coeficientes an y bn de la serie de Fourier. La representación de las magnitudes an y bn en función de la frecuencia se conoce como espectro de frecuencia. El espectro de frecuencia se presenta preferiblemente en magnitud y en fase para las diferentes frecuencias. En la Figura 1.12 se presentan los resultados. El análisis de la señales de vibración requiere interpretar la información compleja obtenida de una máquina. En contradicción a las curvas simples teóricas de vibración, mostrada en la figura 1.5, el perfil de las vibraciones de una máquina o componente es complejo. Esto se debe al hecho que generalmente existen varias fuentes de vibración. La vibración producida de cada fuente se refleja en la señal obtenida siendo ésta la resultante de cada uno de los perfiles generados. Esta señal de vibración se puede analizar en el tiempo o en la frecuencia.
0 0,5 1 1,5 2 2,5 3
0,0
-1,0
-0,5
0,5
1,0
1,5
t [s]
x(t) [µm]
Figura 1.10 Señal en el tiempo
Figura 1.11 Componentes de la serie de Fourier

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.14
Figura 1.12 Espectro de frecuencia
En muchas aplicaciones prácticas, como en el caso de determinar experimentalmente las amplitudes de la vibración utilizando un sensor de vibraciones, no se dispone de una función, x(t), continua en el tiempo ni de una expresión matemática; se dispone de un conjunto de valores de la función tomados con intervalo de tiempo. En este caso, los coeficientes an y bn deben ser obtenidos mediante una integración numérica. Si se tiene un conjunto de N valores xk(t), tomados en un periodo T, los coeficientes se determinan mediante las siguientes expresiones:
01 1 1
2 22 2 2; cos ; sin
N N Ni i
i n i n i
i i i
n t n ta x a x b x
N N T N T= = =
π π= = =∑ ∑ ∑
Desde el punto de vista practico, las fuentes de vibración producen vibraciones armónicas simples relacionadas con la frecuencia circular de los componentes móviles. Por lo tanto, estas frecuencias son múltiplos de la velocidad de operación de la máquina, expresada en min-1, rpm ó cpm. Determinar estas frecuencias es el primer paso básico en el análisis de la condición de operación de la máquina. En la Figura 1.13 se representa una señal de vibración en el tiempo obtenida de una máquina industrial. La gráfica en el dominio del tiempo puede ser utilizada para estudiar el comportamiento global de la máquina y estudiar cambios en las condiciones de operación. Sin embargo, en el dominio de tiempo es difícil de utilizar, ya que no permite determinar la contribución de cada una de las fuentes particulares de vibración. Los datos en el dominio de la frecuencia se obtienen al convertir los datos en el tiempo, utilizando una técnica matemática conocida como transformada rápida de Fourier, FFT. Esta transformada, permite representar cada componente de vibración de la máquina mediante un espectro de valores discretos pico a una frecuencia específica. La amplitud en el dominio de frecuencia es el desplazamiento por unidad de tiempo relacionada con una frecuencia particular. En la Figura 1.14 se representa el espectro de frecuencia de la señal del ventilador.

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.15
0 0,05 0,1 0,15 0,2 0,25 0,3
-15
-10
-5
0
5
10
15
t [s]
v(t) [m/s]
Figura 1.13 Señal de la vibración de un ventilador a 1800 min-1
0 50 100 150 200 250 300 350 400 450 500
0
0,5
1,0
1,5
2,0
2,5
f [Hz]
v(t) [m/s] (rms)
1x
2x
3x
5x
Figura 1.14 Espectro de frecuencia de la vibración en el ventilador El espectro de frecuencia, comúnmente se representa a frecuencias múltiples de la frecuencia de operación del motor. Esta representación es más significativa que el valor de su frecuencia absoluta. El ventilador opera a una velocidad de 1800 min-1, f = 30 Hz. Se observa del espectro de frecuencia, Figura 1.14, que las componentes de mayor amplitud ocurren a frecuencias de 30, 60, 90 y 150 Hz. Estos valores se corresponden con frecuencias a 1X, 2X, 3X, y 5X. Esta representación es de mayor utilidad para el análisis de la señal de vibración.

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.16
Ejemplo 1.1 En la Figura 1.15 se presenta un función periódica, con periodo T = 1s y amplitud de una unidad. Obtenga los coeficientes de las series de Fourier para esta función.
0 1 1,5 2
-2
0
2
t [s]0,5
A
1
-1
-0,5-1
Figura 1.15 Función periódica Por tratarse de una función impar, los términos de la función coseno, an, son cero. Los términos de la función seno, se obtienen mediante la siguiente expresión:
( )/ 2
1/ 2
2sin ( ) d ;
T
n
T
b n t x t tT
−
= ω ⋅∫
donde T = 1s, f1 = 1 Hz, 12
2T
πω = = π rad/s. La solución de la integral es dada por:
( ) ( ) ( ) ( )0 / 2
1 1/ 2 0
2 2-1 sin ( ) d 1 sin ( ) d
T
n
T
b n t x t t n t x t tT T
−
= ⋅ ω ⋅ + ⋅ ω ⋅∫ ∫
( )0 / 2
1 1
1 1/ 2 0
cos cos2 21 cos
T
n
T
n t n tb n
T n n n−
ω ω = − = − π
ω ω π
Finalmente se tiene:
0 , es par
4, es imparn
n
bn
n
= π
Por lo que la expresión en series de Fourier es dado por la siguiente expresión:
4 1 1 1( ) sin 2 1 sin 2 3 sin 2 5 sin 2 7 ...
3 5 7x t t t t t
= π⋅ + π⋅ + π⋅ + π⋅ +
π
En la Figura 1.16 se presenta el espectro de frecuencia de las amplitudes de la función estudiada.

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.17
0 5 10 15 20
0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
A
f [Hz] Figura 1.16 Espectro de frecuencia
En la Figura 1.17 se representa la suma de las componentes en el espacio tiempo frecuencia. La función resultante es la suma de cada una de estas componentes.
02
46
810
1,5
0
-1,5
2
1
0
f [Hz]
A
t [s]
13
57
9
Figura 1.17 Diagrama Amplitud vs tiempo – frecuencia
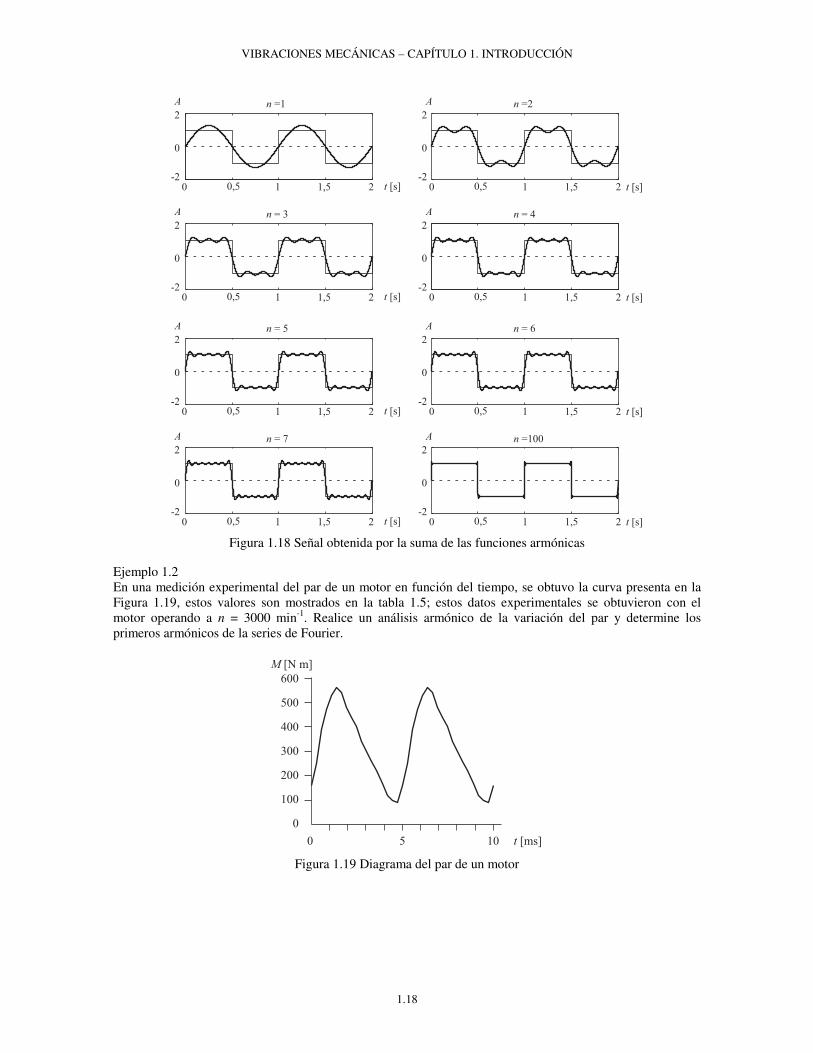
En la Figura 1.18 se representa la forma de la función cuando se considera diferente número de componentes de la función sinusoidal. Se observa que al tomar muchos componentes prácticamente se genera la misma señal. En la Figura 1.18 n representa el número de términos de la función seno. Es importante recordar que en esta serie solo se toman múltiplos impares de la frecuencia fundamental.
VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.18
0 1 1,5 2-2
0
2n =1
t [s]0,5 0 1 1,5 2-2
0
2n =2
t [s]0,5
A A
0 1 1,5 2-2
0
2n = 3
t [s]0,5 0 1 1,5 2-2
0
2n = 4
t [s]0,5
A A
0 1 1,5 2-2
0
2n = 5
t [s]0,5 0 1 1,5 2-2
0
2n = 6
t [s]0,5
A A
0 1 1,5 2-2
0
2n = 7
t [s]0,5 0 1 1,5 2-2
0
2n =100
t [s]0,5
A A
Figura 1.18 Señal obtenida por la suma de las funciones armónicas
Ejemplo 1.2 En una medición experimental del par de un motor en función del tiempo, se obtuvo la curva presenta en la Figura 1.19, estos valores son mostrados en la tabla 1.5; estos datos experimentales se obtuvieron con el motor operando a n = 3000 min-1. Realice un análisis armónico de la variación del par y determine los primeros armónicos de la series de Fourier.
0
0
100
200
300
400
500
600
t [ms]
M [N m]
105
Figura 1.19 Diagrama del par de un motor

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.19
Tabla 1.5 Mediciones experimentales del par en un ciclo
t [ms] 0 0,278 0,556 0,833 1,111 1,389 1,667 M [N m] 160 250 390 470 530 560 540 t [ms] 1,944 2,222 2,5 2,778 3,056 3,333 3,611 M [N m] 480 440 400 340 300 260 220 t [ms] 3,889 4,167 4,44 4,722 5 M [N m] 170 120 100 90 160
En las señales obtenidas del motor se presenta una repetición del par motor cada 5 ms, con lo que se obtiene una frecuencia f =1 /0,005 ms = 200 Hz, y una frecuencia angular ω = 2 π / 0,005 = 1256,6 rad/s. Los coeficientes se obtienen mediante:
19
01 1
2 2629,474 N m
19
N
i i
i i
a M MN = =
= = =∑ ∑
( ) ( )19
1 11 1
2 2cos 2 cos 2
19
N
n i i i i
i i
a M n f t M n f tN = =
= π = π∑ ∑
( ) ( )19
1 11 1
2 2sin 2 sin 2
19
N
n i i i i
i i
b M n f t M n f tN = =
= π = π∑ ∑
En la tabla 1.6 se presenta el cálculo de los tres primeros coeficientes an y bn. Sólo se presentan estos valores por motivos de espacio. Es importante recordar que la frecuencia fundamental es f = 200 Hz.
i t [ms] Mi n = 1 n = 2 n = 3
Mi cos(2πf ti) Mi sin(2πf ti) Mi cos(4πf ti) Mi sin(4πf ti) Mi cos(6πf ti) Mi sin(6πf ti) 1 0,00 160 160,00 0,00 160,00 0,00 160,00 0,00 2 0,28 250 234,92 85,51 191,51 160,70 125,00 216,51 3 0,56 390 298,76 250,69 67,72 384,08 -195,00 337,75 4 0,83 470 235,00 407,03 -235,00 407,03 -470,00 0,00 5 1,11 530 92,03 521,95 -498,04 181,27 -265,00 -458,99 6 1,39 560 -97,24 551,49 -526,23 -191,53 280,00 -484,97 7 1,67 540 -270,00 467,65 -270,00 -467,65 540,00 0,00 8 1,94 480 -367,70 308,54 83,35 -472,71 240,00 415,69 9 2,22 440 -413,46 150,49 337,06 -282,83 -220,00 381,05
10 2,50 400 -400,00 0,00 400,00 0,00 -400,00 0,00 11 2,78 340 -319,50 -116,29 260,46 218,55 -170,00 -294,45 12 3,06 300 -229,81 -192,84 52,09 295,44 150,00 -259,81 13 3,33 260 -130,00 -225,17 -130,00 225,17 260,00 0,00 14 3,61 220 -38,20 -216,66 -206,73 75,24 110,00 190,53 15 3,89 170 29,52 -167,42 -159,75 -58,14 -85,00 147,22 16 4,17 120 60,00 -103,92 -60,00 -103,92 -120,00 0,00 17 4,44 100 76,60 -64,28 17,36 -98,48 -50,00 -86,60 18 4,72 90 84,57 -30,78 68,94 -57,85 45,00 -77,94 19 5,00 160 160,00 0,00 160,00 0,00 160,00 0,00
∑ 5980 -834,5 1626 -287,2 214,36 95 25,981 2
19()⋅∑ 629,47 -87,84 171,16 -30,24 22,564 10 2,735
La función de aproximación de los datos experimentales es dado por:
( ) 314,735 87,84cos(400 ) 171,16sin(400 ) 30,24cos(800 ) 22,564sin(800 )
10cos(1200 ) 2,375sin(1200 ) 16,82cos(1600 ) 2,45sin(1600 )
M t t t t t
t t t t
= − π + π − π + π
+ π + π + π + π
En la Figura 1.20 se presenta la función de aproximación con diferente número de términos. Para obtener el espectro de frecuencia, se requiere calcular los coeficientes Cn obtenido mediante la raíz cuadrada de la suma de los cuadrados de los coeficientes An y Bn; en la Figura 1.21 se presenta el espectro de frecuencia.

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.20
0 1 2 3 4 5
0
100
200
300
400
500
600
0 1 2 3 4 5
0
100
200
300
400
500
600
0 1 2 3 4 5
0
100
200
300
400
500
600
0 1 2 3 4 5
0
100
200
300
400
500
600
t [ms]
t [ms]
t [ms]
t [ms]
M [Nm] M [Nm]
M [Nm] M [Nm]
n = 1 n = 2
n = 3 n = 4
Figura 1.20 Aproximación de los datos experimentales del motor
0 200 400 600 800 1000 1200
0
50
100
150
200
250
300
350
f [Hz]
M [N m]
Figura 1.21 Espectro de frecuencia de los datos experimentales En un proceso real se tendría la captura de valores con una frecuencia alta y un número de datos elevados. Generalmente se tienen datos en los que se tendrían varios periodos de la señal. En la mayoría de los procesos, no es sencillo identificar un periodo, por lo que se toma como frecuencia, la frecuencia de muestreo de captura de datos, dividido por la mitad del número de datos. La serie de Fourier puede ser representado en términos de números complejos. Una función exponencial puede ser representado mediante:
j jcos jsin ; cos jsint te t t e t tω ωω ω ω ω−= + = −
Una función periódica puede ser representado mediante
( )2
j( )
π∞
=−∞
= ∑k t
Tk
k
x t X f e
donde ( ) j2
0
1( ) dk
T
f t
kX f x t e tT
π−= ∫
Cuando el periodo tiende a ser infinito, lo que ocurre en funciones aperiódicas, el componente a una frecuencia fk es dado por:

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.21
( ) j2( ) df tX f x t e t
π∞
−
−∞
= ∫
En la versión discreta de la representación compleja de un vector x con N datos, se tiene que el conjunto de datos se puede obtener mediante la siguiente serie:
j 2 ( 1) ( 1) /1( ) ( ) ; 1k n N
k
x n X k e n NN
π − ⋅ −= ≤ ≤∑
Los coeficientes X(k), que son los utilizados en el espectro de frecuencia, se definen mediante:
j 2 ( 1) ( 1) /
1
( ) ( ) ; 1N
k n N
n
X k x n e k Nπ− − ⋅ −
=
= ≤ ≤∑
1.9 REPRESENTACIÓN VECTORIAL Y MEDIANTE NÚMEROS COMPLEJOS Una forma muy conveniente de representar una oscilación armónica es mediante los números complejos. Utilizando esta representación es posible obtener una solución simple a la ecuación diferencial de muchos sistemas. La clave está en obtener la solución en frecuencia y no en el tiempo. En la Figura 1.22 se representa a Z en el plano complejo. El número complejo Z es compuesto de una parte real y una parte imaginaria:
Z = x + j y En forma polar, Z tiene una magnitud y un argumento
Z = r e iωt
abc
Im
Re x
y
ωt
π/2
π/2
Z
Zi ω
Z−ω2
Figura 1.22 Representación gráfica de un fasor
Una señal armónica del desplazamiento )cos( trx ω= es la parte real del número complejo Z; la relación entre
la representación compleja y sus componentes es dada por la siguiente relación:
ie cos( ) i sin( )tZ r r t r tω= = ω + ω
El número complejo reiωt contiene información de la amplitud y la fase y es llamado el fasor del movimiento armónico.
VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.22
La representación del fasor de la vibración armónica es conveniente y puede ser resuelta por métodos gráficos o métodos analíticos. La velocidad se obtiene al derivar con respecto al tiempo al favor del desplazamiento, v = i ω r eiωt = i ω Z, y la aceleración es la segunda derivada con respecto al tiempo, a = −ω
2reiωt = −ω
2Z.
Ambas variables también son fasores y se representan en el mismo plano de Z. Una derivada es equivalente a girar al favor por π/2 en sentido antihorario y multiplicar por ω; la integral, operación inversa de la derivada, equivale a girar π/2 en sentido horario y dividir por ω. 1.10 MEDICIÓN DE PARÁMETROS La señal de la vibración puede ser representada mediante gráficos como la forma de onda o el espectro de frecuencia. Estas gráficas son basadas en parámetros medibles como la frecuencia y la amplitud. La frecuencia es el número de repeticiones de una función específica o una componente de la vibración sobre una unidad de tiempo específica. La frecuencia puede ser expresada en ciclos por minuto, cpm, o expresada en ciclos por segundo, cps o Hz. Por simplicidad las frecuencias de vibración de los elementos de una máquina son expresadas como múltiplos de la frecuencia de operación de la máquina, ver figura 1.9. Esta representación es porque muchos fallas tienden a presentarse a determinadas frecuencias, con lo que se puede diferenciar algunas fallas de otras. La amplitud se refiere al valor máximo del movimiento de la vibración. Este valor puede representarse en términos de desplazamiento (mils o micras), velocidad (pulg/s ó mm/s), o aceleración (pulg/s2 ó mm/s2). Para la caracterización de la amplitud de la vibración, es común definir términos como valor pico a pico, valor cero a pico, valor RMS (valor cuadrático medio). El valor pico a pico es la suma del máximo valor positivo y el máximo valor negativo. El valor cero a pico es el valor más grande, positivo o negativo, de la señal durante el periodo de la vibración. El valor de la señal rectificada, es el valor en un intervalo T, de la señal tomada como positiva. Este valor se obtiene mediante:
∫=
T
m tdtxT
x0
)(1
El valor cuadrático medio, valor eficaz o valor RMS, es la raíz cuadrada del cuadrado de la señal medida en el periodo T.
∫=
T
rms tdtxT
x0
2 )(1
Ejemplo 1.3 Determine el valor eficaz de una función armónica dado por
( ) ( )sin 2x t A f t= π
El periodo de la función es dado por
T = 1 / f El valor rms de la función armónica es:
( )2
2 2rms
0
1 1sin 2
2 2
TA A
x A f t d tT T f
= π = =∫
FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.23
Para señales discretas, vector x de dimensión N, se define mediante
2
1
N
rms n
n
x x N=
= ∑
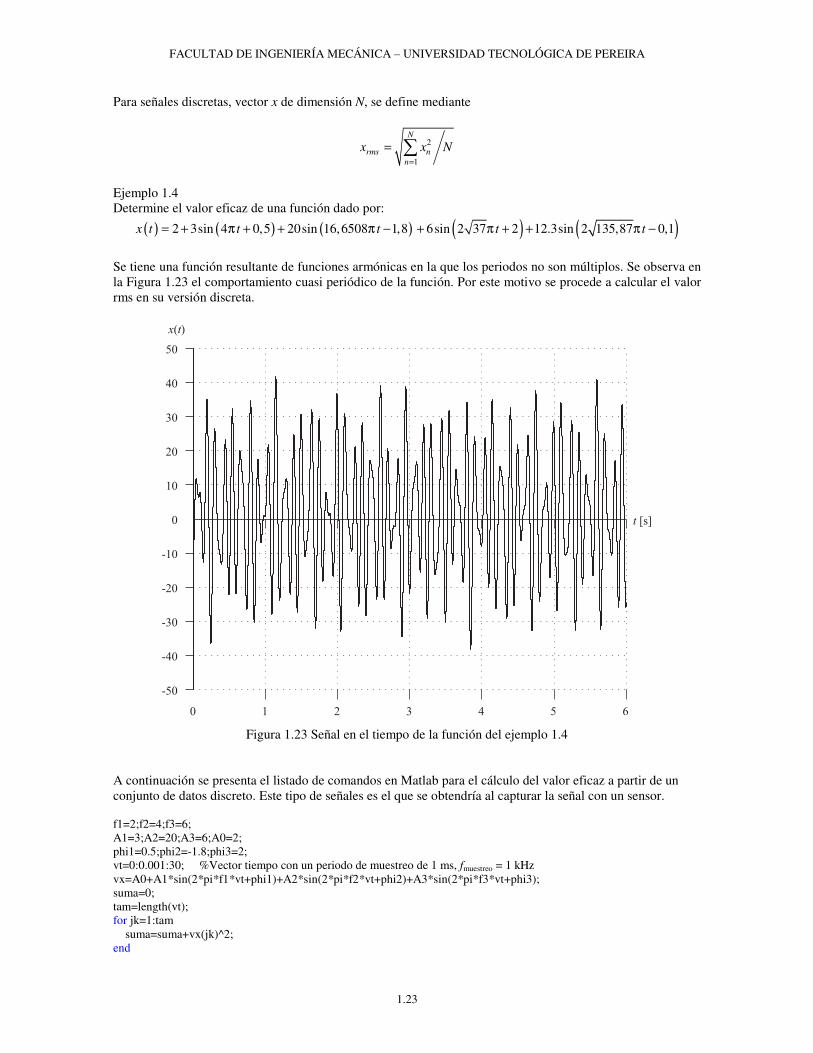
Ejemplo 1.4 Determine el valor eficaz de una función dado por:
( ) ( ) ( ) ( ) ( )2 3sin 4 0,5 20sin 16,6508 1,8 6sin 2 37 2 12.3sin 2 135,87 0,1x t t t t t= + π + + π − + π + + π −
Se tiene una función resultante de funciones armónicas en la que los periodos no son múltiplos. Se observa en la Figura 1.23 el comportamiento cuasi periódico de la función. Por este motivo se procede a calcular el valor rms en su versión discreta.
0 1 2 3 4 5 6
-50
-40
-30
-20
-10
0
10
20
30
40
50
x(t)
t [s]
Figura 1.23 Señal en el tiempo de la función del ejemplo 1.4 A continuación se presenta el listado de comandos en Matlab para el cálculo del valor eficaz a partir de un conjunto de datos discreto. Este tipo de señales es el que se obtendría al capturar la señal con un sensor. f1=2;f2=4;f3=6; A1=3;A2=20;A3=6;A0=2; phi1=0.5;phi2=-1.8;phi3=2; vt=0:0.001:30; %Vector tiempo con un periodo de muestreo de 1 ms, fmuestreo = 1 kHz vx=A0+A1*sin(2*pi*f1*vt+phi1)+A2*sin(2*pi*f2*vt+phi2)+A3*sin(2*pi*f3*vt+phi3); suma=0; tam=length(vt); for jk=1:tam suma=suma+vx(jk)^2; end

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.24
valor=sqrt(suma/tam) R: xrms = 15,0458 Una segunda alternativa consiste en calcular el valor rms a partir de las amplitudes de las funciones armónicas que componen la señal:
2 2 2 22
rms2 2 2 3 20 6
/ 14,98332 2 4ix A N
+ + += = =∑
Esta evaluación es posible ya que los fasores son independientes. Para la representación de los niveles de vibración es común utilizar escalas lineales y logarítmicas. El interés en utilizar escalas logarítmicas es en general, valorar los cambios en los niveles de vibración por el incremento relativo con respecto a los niveles normales de operación. La escala logarítmica se define en decibeles para comparar los niveles de vibración. El decibel de un nivel x1 con respecto a un nivel de referencia x0 se determina mediante:
[ ] 1
0
db 20logx
Nx
=
1.11 EJERCICIOS 1.1 En un ventilador centrifugo, el aire impulsado en la tubería, tiene un comportamiento de una función
impulso correspondiéndose a la descarga del paso del alabe en la región de descarga, tal como se muestra en la figura 1. La frecuencia de estos impulsos es determinado por la velocidad de rotación del eje del ventilador, n, y del número de alabes, N. Considerando que el ventilador gira a n = 100 min-1, y tiene cuatro alabes, determina los primeros cuatro armónicos para la fluctuación de la presión en la tubería.
pmáx = 600 kPa
t [s]0 T/4 T 5T/4 2T 9T/4 3T 9T/4
Figura P.1.1
1.2 Realice el análisis armónico, incluyendo los tres primeros armónicos de la función dada a continuación
Tabla P 1.2
ti 0,0 0,02 0,04 0,06 0,08 0,10 0,12 0,14 xi 0 5 -8 -8 -6 -8 -6 6 ti 0,16 0,18 0,20 0,22 0,24 0,26 0,28 0,30 xi 17 14 8 3 -10 -14 -10 0
1.3 Determine la ecuación de desplazamiento s(t) del pistón del mecanismo biela manivela. Considere que la
manivela gira con velocidad angular constante a 6 rad/s. Determine las componentes armónicas y represente el espectro de frecuencia para la amplitud y la fase. Considere r = 30 mm, L = 75 mm. Compare la función que se obtiene utilizando 2, 3, 4 y 5 armónicos con la función de desplazamiento.

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.25
L
θ
r
r+L
s
Figura P 1.3
1.4 La fuerza de impacto creado por una máquina forjadora puede ser modelada tal como se muestra en la figura. Determine la expansión en series de Fourier de la fuerza de impacto.
0 2 4 6 8 100
100
200
300
400
500
600
1 3 t [s]
F [N]
Figura P 1.4
La fuerza puede ser representada, aproximadamente, mediante la función:
( )2 3 4 5 63 478,92 213,86 60,344 9,805 0,815 0,0272 , 0 1
0 ,1 4
t t t t t t tF t
t
− + − + − + − ≤ ≤=
< <
1.5 En la figura P 1.5 se representa el mecanismo de la limadora y el par motor requerido en la manivela para
su accionamiento. Determine los cinco primeros armónicos para el par motor. En la tabla P.1.4 se presentan los valores del par en función del tiempo. Reconstruya la figura con los armónicos obtenidos, represente el espectro de frecuencia.

VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
1.26
Figura P 1.5
Tabla P 1.5
t [s] 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2 M [Nm] 9,832 11,321 11,917 11,776 11,062 9,949 8,6 7,128 5,59 3,988 2,297 t [s] 0,22 0,24 0,26 0,28 0,3 0,32 0,34 0,36 0,38 0,4 0,42 M [Nm] 0,523 -1,185 -2,364 1,304 9,602 19,312 23,34 11,85 -7,514 -12,38 -5,84 t [s] 0,44 0,46 0,48 0,5 M [Nm] -0,02 2,885 7,214 9,832
1.6 1.7

FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
1.27
0.05
0.1
0.15
0.2
5
10
15
20
0
10
-10
f [Hz]
t [s]