Embed Size (px)
Citation preview

Sistemas de Control Industrial Sistemas de Control Industrial
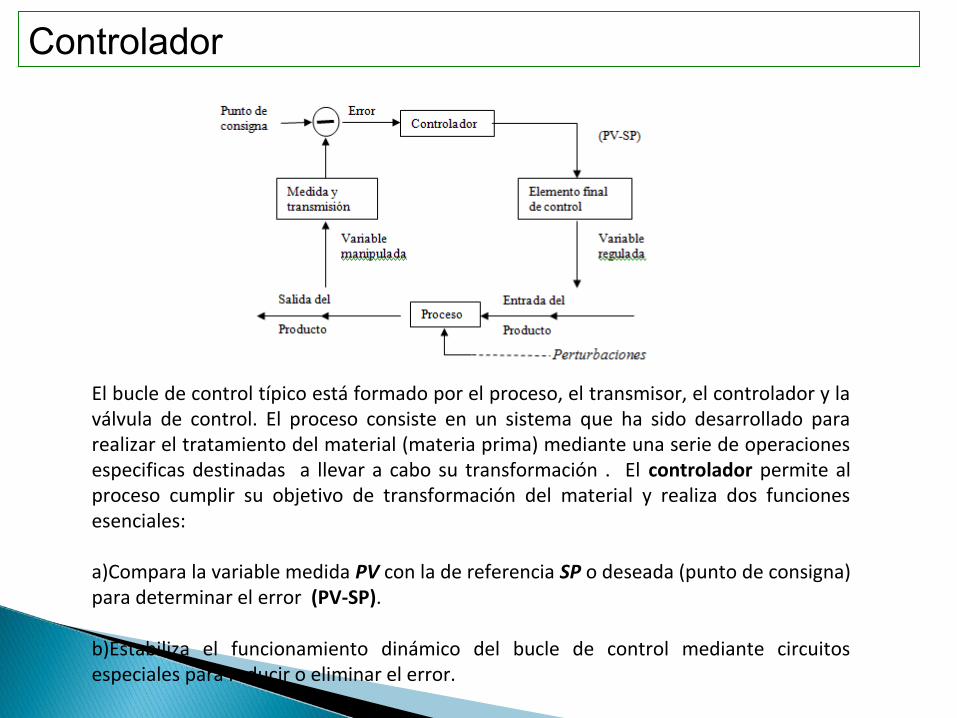
El bucle de control típico está formado por el proceso, el transmisor, el controlador y la válvula de control. El proceso consiste en un sistema que ha sido desarrollado para realizar el tratamiento del material (materia prima) mediante una serie de operaciones especificas destinadas a llevar a cabo su transformación . El controlador permite al proceso cumplir su objetivo de transformación del material y realiza dos funciones esenciales:
a)Compara la variable medida PV con la de referencia SP o deseada (punto de consigna) para determinar el error (PV-SP).
b)Estabiliza el funcionamiento dinámico del bucle de control mediante circuitos especiales para reducir o eliminar el error.
Controlador

• Control ON-OFF. En la regulación todo o nada (ON-OFF) el elemento final de control se mueve rápidamente entre una de dos posiciones fijas a la otra, para un valor único de la variable controlada. Se aplica en el control de nivel y temperatura en procesos de gran capacidad.
Sistemas de control
• Control Proporcional de tiempo variable. En este sistema de regulación existe una relación predeterminada entre el valor de la variable controlada y la posición media en tiempo del elemento final de control de dos posiciones. Es decir, la relación del tiempo de conexión al de desconexión final es proporcional al valor de la variable controlada. La longitud de un ciclo completo es constante pero la relación entre los tiempos a desconexión dentro de cada ciclo varía al desviarse la variable controlada del punto de consigna.

Sistemas de control• Control proporcional. En el sistema de posición proporcional, existe una relación lineal continua entre el valor de la variable controlada y la posición del elemento final de control. Se aplica en procesos donde la presencia de offset no es un problema.
• Control proporcional + integral En el control integral, el elemento final se mueve de acuerdo con una función integral en el tiempo de la variable controlada. La acción integral mueve la válvula a una velocidad proporcional a la desviación con respecto al punto de consigna.

Sistemas de control
• Control proporcional + derivativoEn la regulación derivada existe una relación lineal continua entre la velocidad de variación de la variable controlada y la posición del elemento final de control. Es decir, el movimiento de la válvula es proporcional a la velocidad de cambio de la variable. Por ejemplo, la temperatura, cuanto más rápidamente varíe ésta tanto mas se moverá la válvula. La acción derivada corrige la posición de la válvula proporcionalmente a la velocidad de cambio de la variable controlada.
• Control proporcional + integral + derivativo PIDEl sistema PID integra los tres sistemas de control anteriores en donde es posible ajustar las variables de ganancia: g, k´ y k´´ . Se aplican en procesos rápidos y retardos apreciables , donde las perturbaciones del proceso no sean bien conocidos.

La lógica borrosa o difusa se basa en lo relativo de lo observado. Este tipo de lógica toma dos valores aleatórios, pero contextualizados y referidos entre sí. Así, por ejemplo, una persona que mida 2 metros es claramente una persona alta, si previamente se ha tomado el valor de persona baja y se ha establecido en 1 metro. Ambos valores están contextualizados a personas y referidos a una medida métrica lineal.La lógica difusa (o borrosa) es una de ellas, que se caracteriza por querer cuantificar esta incertidumbre: Si P es una proposición, se le puede asociar un número v(P) en el intervalo [0,1] tal que: Si v(P) = 0, P es falso. Si v(P) = 1, P es verdadero. La veracidad de P aumenta con v(P).
Lógica Difusa

Redes neuronales
En el campo de la inteligencia artificial se refiere habitualmente de forma más sencilla como redes de neuronas o redes neuronales, las redes de neuronas artificiales (denominadas habitualmente como RNA o en inglés como: "ANN"1) son un paradigma de aprendizaje y procesamiento automático inspirado en la forma en que funciona el sistema nervioso de los animales. Se trata de un sistema de interconexión de neuronas en una red que colabora para producir un estímulo de salida

Una de las misiones en una red neuronal consiste en simular las propiedades observadas en los sistemas neuronales biológicos a través de modelos matemáticos recreados mediante mecanismos artificiales (como un circuito integrado, un ordenador o un conjunto de válvulas). El objetivo es conseguir que las máquinas den respuestas similares a las que es capaz de dar el cerebro que se caracterizan por su generalización y su robustez.
Una red neuronal se compone de unidades llamadas neuronas. Cada neurona recibe una serie de
entradas a través de interconexiones y emite una salida. Esta salida viene dada por tres funciones:
Una función de propagación (también conocida como función de excitación), que por lo general consiste en el sumatorio de cada entrada multiplicada por el peso de su interconexión (valor neto). Si el peso es positivo, la conexión se denomina excitatoria; si es negativo, se denomina inhibitoria.
Una función de activación, que modifica a la anterior. Puede no existir, siendo en este caso la salida la misma función de propagación.
Una función de transferencia, que se aplica al valor devuelto por la función de activación. Se utiliza para acotar la salida de la neurona y generalmente viene dada por la interpretación que queramos darle a dichas salidas.
Redes neuronales

Software de procesos de control avanzado.Software de control de lotes.Software de redes Neuronales.Software de control de ciclos.Software de alarmas.Software de dirección asistida.Software de calibración.Software de simulación de procesos.Software para sistemas de seguridad y emergencias.
Para procesos por
•LOTES y•CONTINUOS
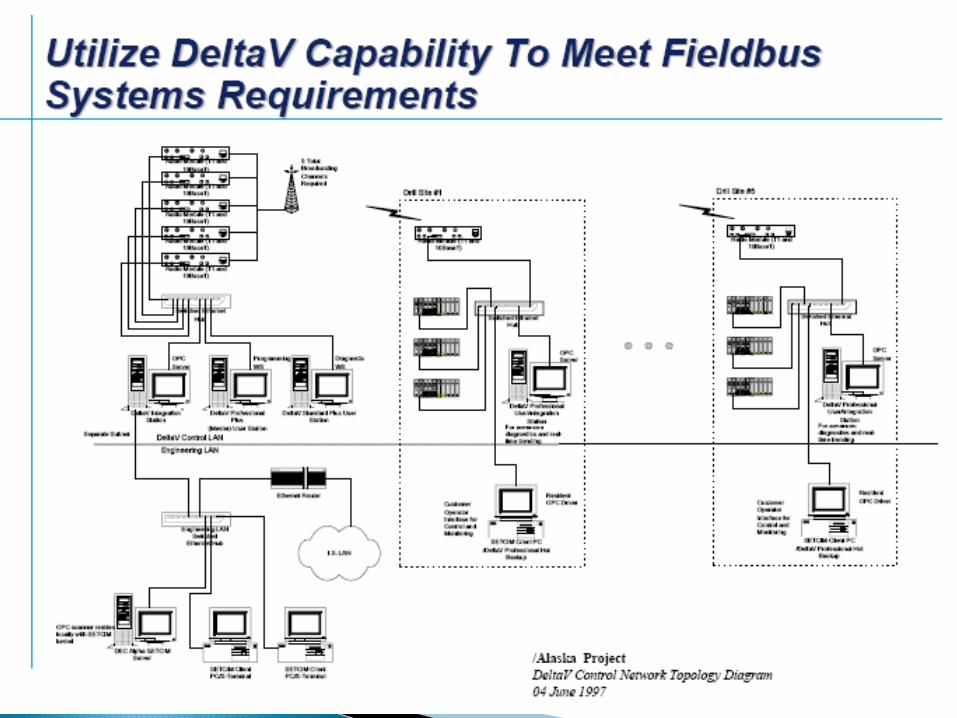
Arquitectura de Planta DigitalArquitectura de Planta Digital
Arquitectura de Planta DigitalArquitectura de Planta Digital
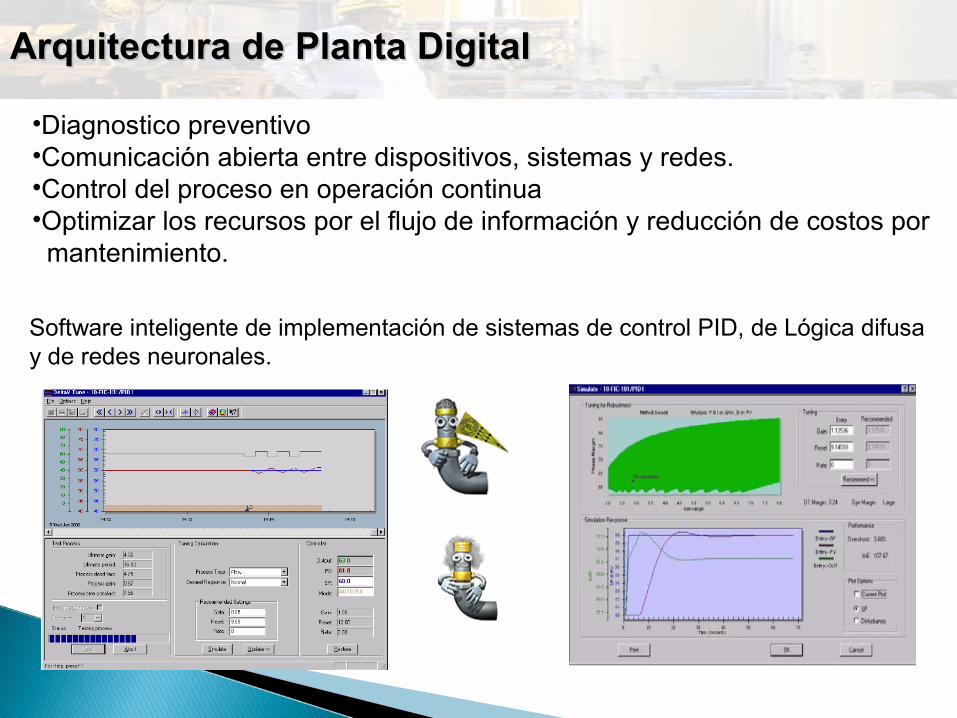
•Diagnostico preventivo•Comunicación abierta entre dispositivos, sistemas y redes.•Control del proceso en operación continua•Optimizar los recursos por el flujo de información y reducción de costos por mantenimiento.
Software inteligente de implementación de sistemas de control PID, de Lógica difusa y de redes neuronales.



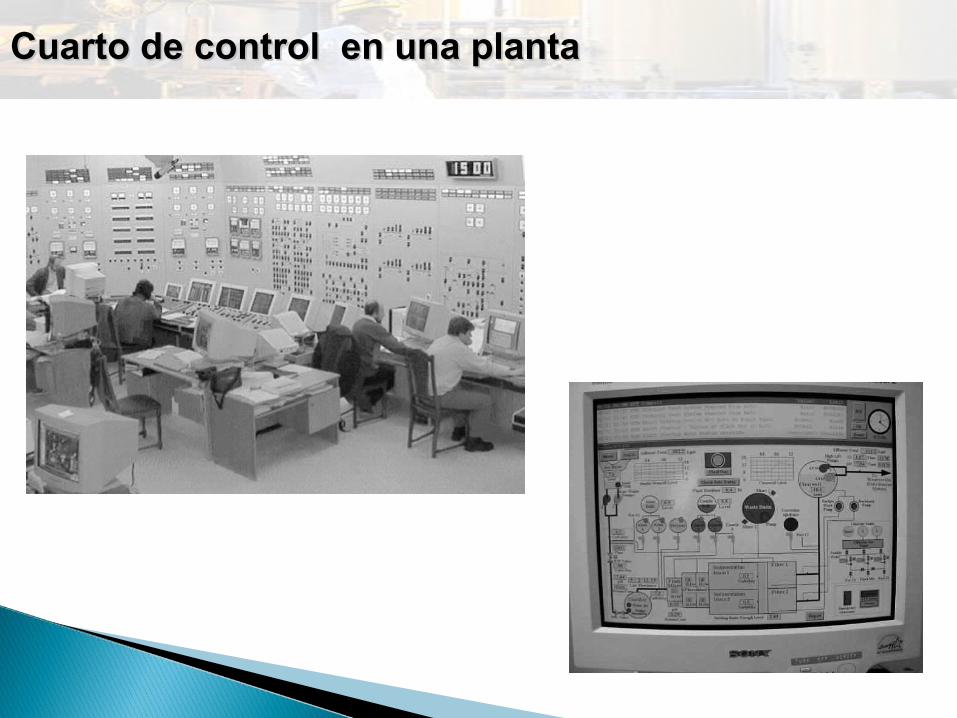
Cuarto de control en una plantaCuarto de control en una planta
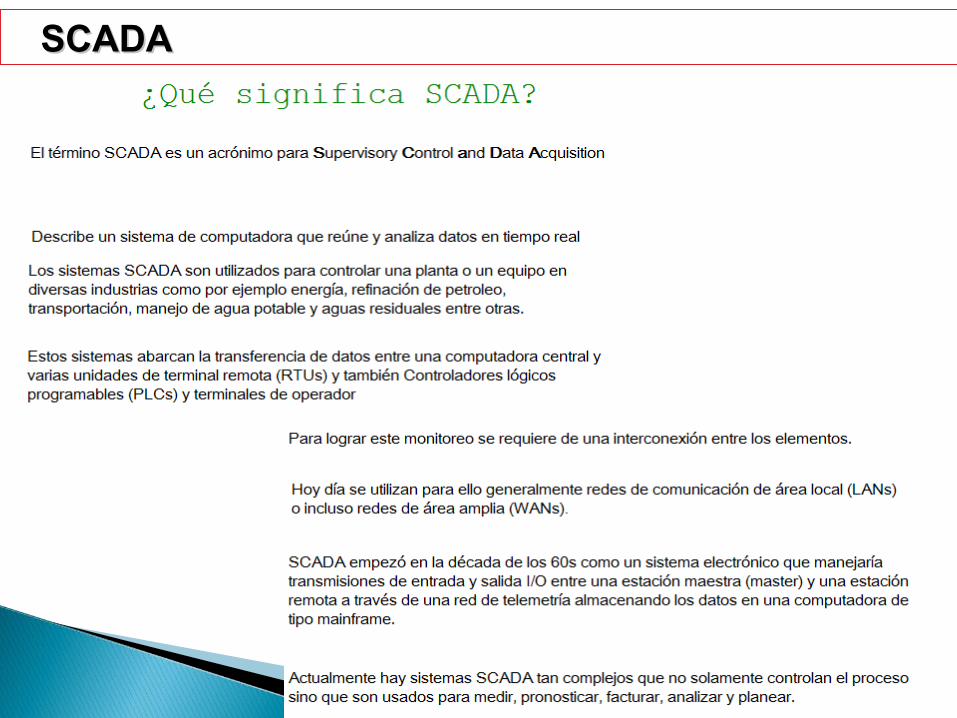
SCADASCADA
SCADASCADA
SCADASCADA

SCADASCADA
SCADASCADA

SCADASCADA
SCADASCADA
SCADASCADA

Instrumentación virtualInstrumentación virtual
GPIBGPIB
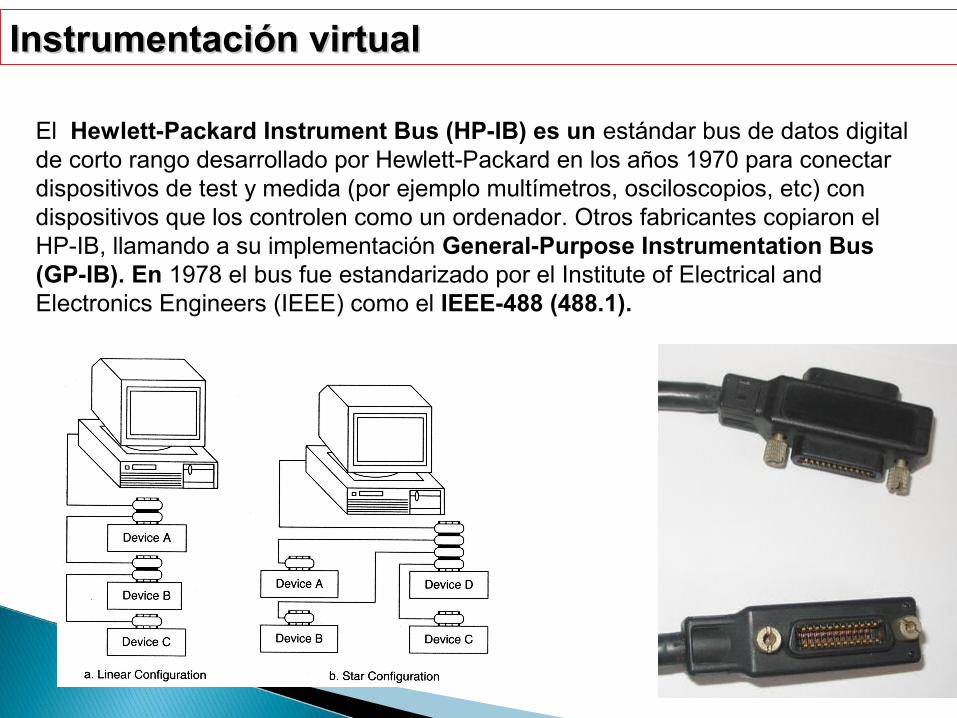
El Hewlett-Packard Instrument Bus (HP-IB) es un estándar bus de datos digital de corto rango desarrollado por Hewlett-Packard en los años 1970 para conectar dispositivos de test y medida (por ejemplo multímetros, osciloscopios, etc) con dispositivos que los controlen como un ordenador. Otros fabricantes copiaron el HP-IB, llamando a su implementación General-Purpose Instrumentation Bus (GP-IB). En 1978 el bus fue estandarizado por el Institute of Electrical and Electronics Engineers (IEEE) como el IEEE-488 (488.1).
Instrumentación virtualInstrumentación virtual

1. PC2. Tarjeta de adquisición de datos
con acondicionamiento de señales 3. Software apropiado
Instrumento Tradicional Instrumento Virtual
Definido por el fabricante Definido por el usuario
Funcionalidad específica, con conectividad limitada.
Funcionalidad ilimitada, orientado a aplicaciones, conectividad amplia.
Hardware es la clave. Software es la clave
Alto costo/función Bajo costo/función, variedad de funciones, reusable.
Arquitectura "cerrada" Arquitectura "abierta".
Lenta incorporación de nuevas tecnología.
Rápida incorporación de nuevas tecnologías, gracias a la plataforma PC.
Bajas economías de escala, alto costo de mantenimiento.
Altas economías de escala, bajos costos de mantenimiento.
Instrumentación virtualInstrumentación virtual
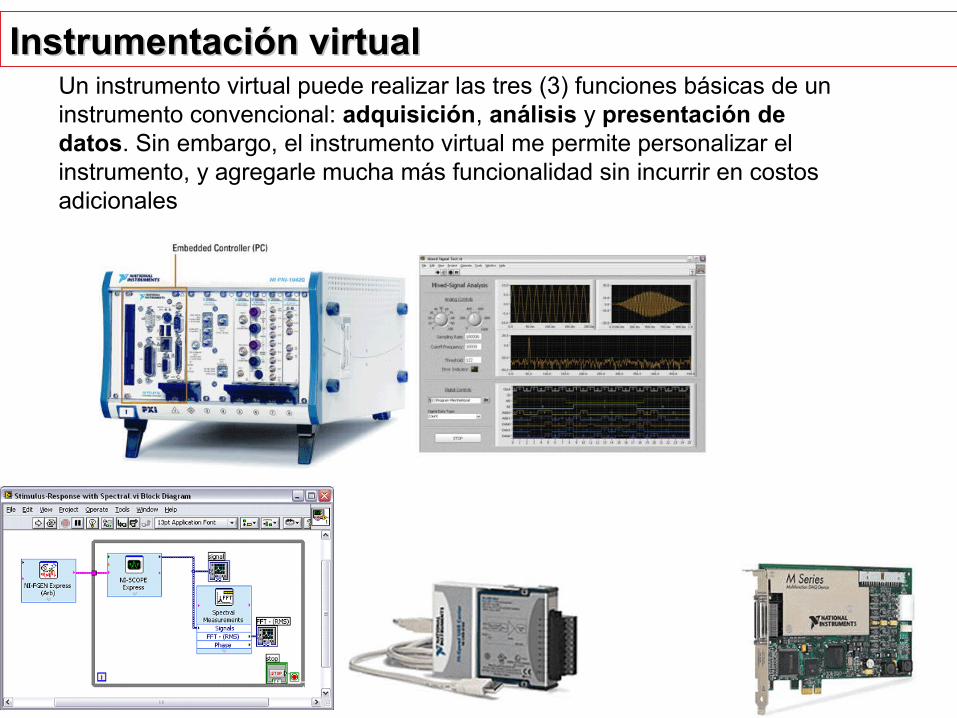
Un instrumento virtual puede realizar las tres (3) funciones básicas de un instrumento convencional: adquisición, análisis y presentación de datos. Sin embargo, el instrumento virtual me permite personalizar el instrumento, y agregarle mucha más funcionalidad sin incurrir en costos adicionales
Instrumentación virtualInstrumentación virtual
Instrumentación virtualInstrumentación virtual
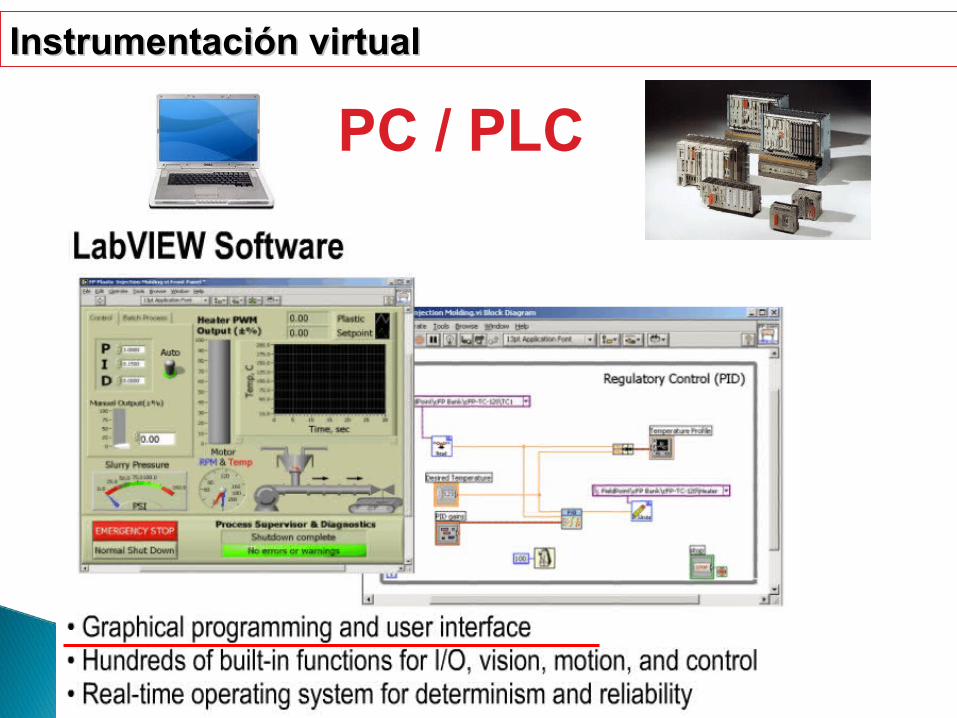
PC / PLC
4. Sistema de control donde se ajuntan las variables de ganancia g, k´ y k´´; se aplica en situaciones donde las perturbaciones del proceso no sean bien conocidos.
1. En la regulación ______________ el elemento final de control se mueve rápidamente entre una de dos posiciones fijas a la otra, para un valor único de la variable controlada.
2. En la regulación ______________ existe una relación lineal continua entre el valor de la variable controlada y la posición del elemento final de control. Se aplica en procesos donde la presencia de offset no es un problema.
3. En la regulación _____________ se corrige la posición de la válvula proporcionalmente a la velocidad de cambio de la variable controlada.
Proporcional
Acción Derivativa
On-OFF
Proporcional + Integral + Derivativa
Evaluación
5. En la regulación ______________ se corrige la posición de la válvula a una velocidad proporcional a la desviación con respecto al punto de consigna.
Acción Integral
6. Describe un sistema de computadora que reúne y analiza datos en tiempo real para el control de un proceso. En aplicaciones complejas permite medir, pronosticar, facturar y planear sobre planta industrial.
7. Sistema de interconexión para producir un estímulo de salida bajo un paradigma de aprendizaje y procesamiento automático.
SCADA Supervisory Control and Data Acquisition
Redes Neuronales
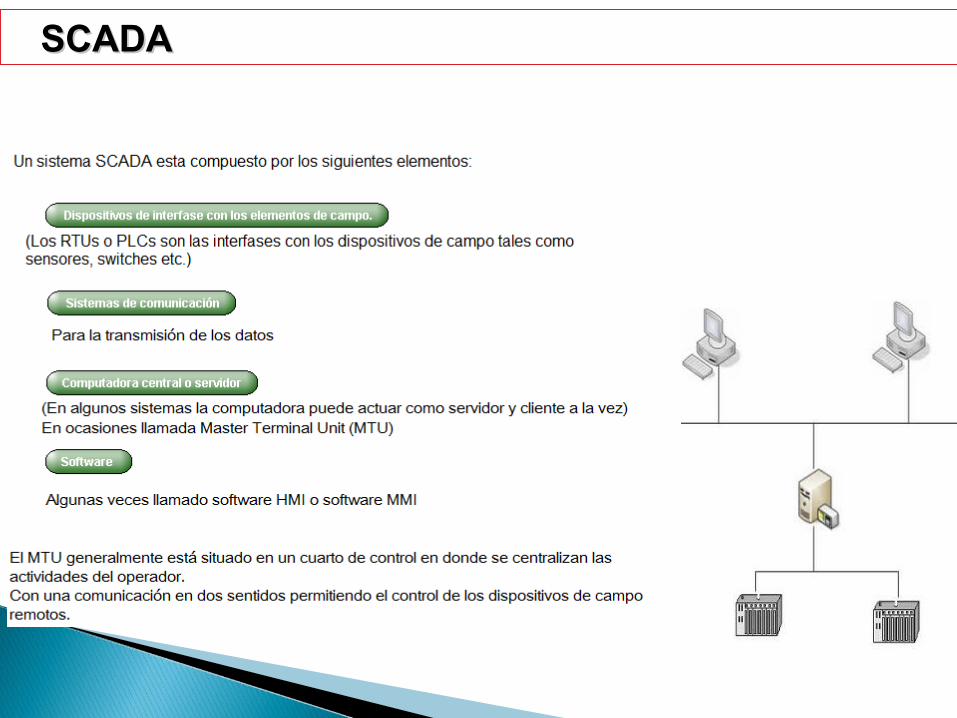
8. En el sistema SCADA su función es reunir datos de los dispositivos de campo y almacenarlos en su memoria hasta que la computadora central los solicita.
RTU Unidades de Terminal Remota
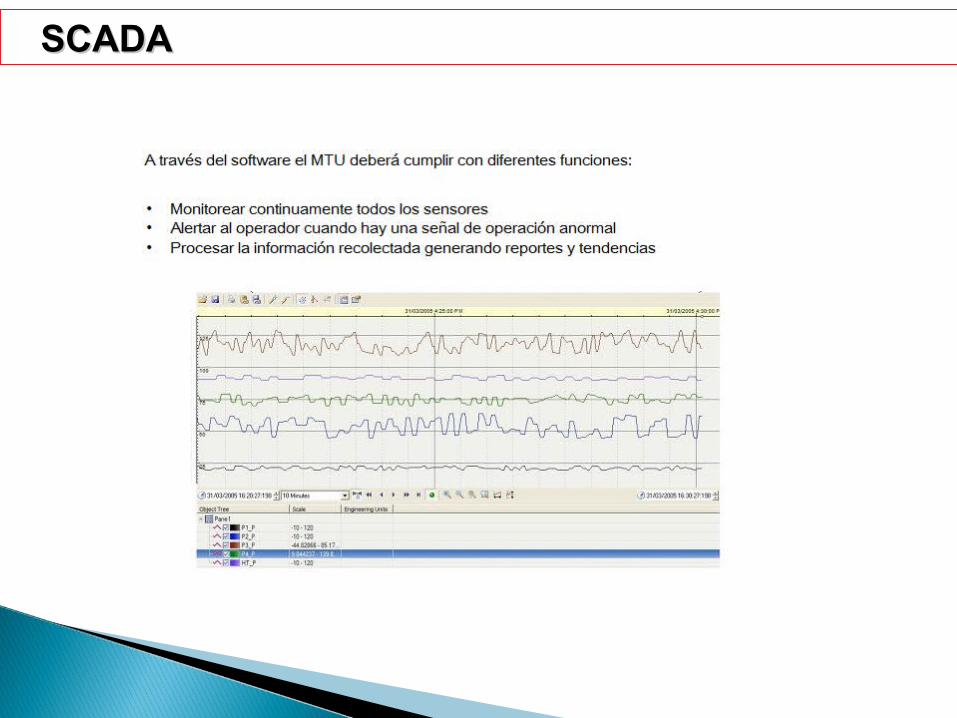
9. Se localiza en la computadora central del sistema SCADA y entre sus funciones están: monitorear los sensores, alertar sobre comportamientos anormales de señales de proceso y recabar información para reportes y tendencias.
Software HMI Human Machine Interface
10. Permite la adquisición, análisis y presentación de datos además de personalizar la interfaz grafica de usuario desde el software.
Instrumentación Virtual



























