Embed Size (px)
Citation preview
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 1/10
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICACusco, 23 al 25 de Octubre de 2007
PROTOTIPADO RÁPIDO POR EXTRUSIÓN DE UNA PASTA CERÁMICA EN UNPROCESO SIMILAR AL USADO EN PROTOTIPADO POR FDM
Guevara Romero E. A! Fa"ar#o $.! Ma%&'e( C.! Sa'a)r&a D.! *&#a+ ,.
*Estudiante de Química, Universidad Nacional de Colombia Sede o!ot", #Estudiante $n!% &ec"nica, Univerisdad Nacional de Colombia
*e'mail( Ea!uevarar)unal%edu%co
RESUMEN
Se describen los undamentos te+ricos necesarios ara la elaboraci+n de una asta cer"mica con las roiedadesreol+!icas necesarias en un roceso de e-trusi+n . con ines en el dise/o or rototiado r"ido, e acuerdo a estose desarrolla una asta . se caracteri1a or medio de diracci+n de ra.os . luorescencia de ra.os 4 se acen
ruebas de e-trusi+n esco!i6ndose el sistema de meor comortamiento% 8dem"s se abordan los undamentos
t6cnicos en el dise/o de una e-trusora con el in de caracteri1ar la asta cer"mica desarrollada . los avances en laelaboraci+n de la automati1aci+n e instrumentaci+n de la ma9uina ara la e-trusi+n de la asta cer"mica%
PALABRAS CLA*E- :rototiado r"ido, reolo!ía, e-trusi+n . automati1aci+n%
; C+di!o 8si!nado( <500%
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 2/10
INTRODUCCIÓN
Breve ree/a #e+ 0ro%o%&0a#o r10&#o
El rototiado r"ido sur!e en <=>7 con el desarrollo de la tecnolo!ía conocida como estereolito!raía lan1ada or laemresa norteamericana 3 S.stem, en aras de a!ili1ar los rocesos de manuactura e-istentes4 es evidente 9ue lamanuactura asistida or comutador ue un !iro en los dise/os de roducci+n de rototios dado 9ue ermiten lainnovaci+n de nuevas !eometrías en los dise/os . el estudio de los mismos en distintas situaciones de una orma m"s
ractica r"ida . ?til%En si, el rototiado r"ido @A:B conocido tambi6n como manuactura or caas @&, la.ered manuacturin!B oabricaci+n de s+lidos en orma libre @S, solid ree orm abricationB es un conunto de tecnolo!ías 9ue ermitenobtener rototios a artir de un arcivo C8, se basa en un roceso de manuactura aditivo, es decir, 9ue adierencia de las t6cnicas de manuactura tradicionales el rototio a acer se reali1a or adici+n de ie1as delmaterial en ve1 del arran9ue de viruta del mismo% En el rototiado r"ido se arte de un dise/o del modelo o
rototio en comutador, 6ste con la a.uda de un sotDare esecial es cortado en caas de unos ocos milímetros de!rosor . lue!o or al!unos de los m?ltiles m6todos e-istentes actualmente, el rototio se !enera or adici+nconsecutiva de dicas caas%
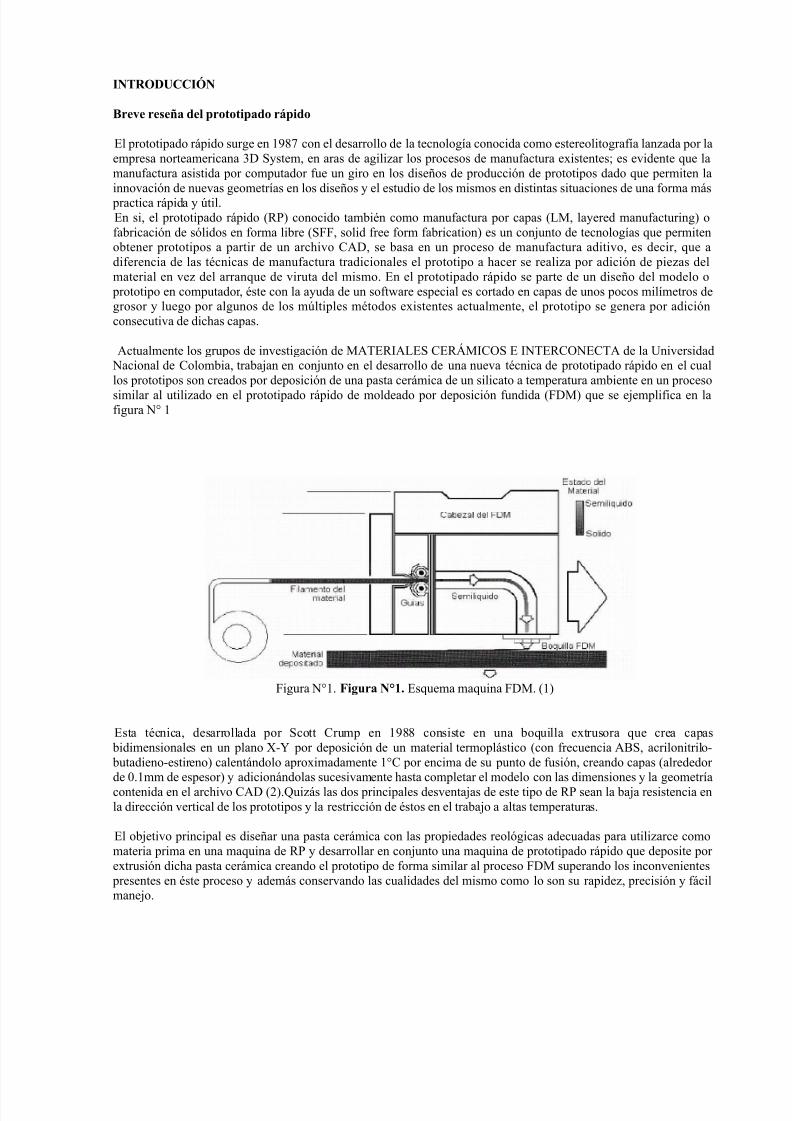
8ctualmente los !ruos de investi!aci+n de &8EA$8ES CEAF&$COS E $NEACONEC8 de la Universidad Nacional de Colombia, trabaan en conunto en el desarrollo de una nueva t6cnica de rototiado r"ido en el cuallos rototios son creados or deosici+n de una asta cer"mica de un silicato a temeratura ambiente en un roceso
similar al utili1ado en el rototiado r"ido de moldeado or deosici+n undida @&B 9ue se eemliica en lai!ura NG <
i!ura NG<% F&2ura N34. Es9uema ma9uina &% @<B
Esta t6cnica, desarrollada or Scott Crum en <=>> consiste en una bo9uilla e-trusora 9ue crea caas bidimensionales en un lano 'H or deosici+n de un material termol"stico @con recuencia 8S, acrilonitrilo' butadieno'estirenoB calent"ndolo aro-imadamente <GC or encima de su unto de usi+n, creando caas @alrededor de 0%<mm de esesorB . adicion"ndolas sucesivamente asta comletar el modelo con las dimensiones . la !eometríacontenida en el arcivo C8 @2B%Qui1"s las dos rinciales desventaas de este tio de A: sean la baa resistencia enla direcci+n vertical de los rototios . la restricci+n de 6stos en el trabao a altas temeraturas%
El obetivo rincial es dise/ar una asta cer"mica con las roiedades reol+!icas adecuadas ara utili1arce comomateria rima en una ma9uina de A: . desarrollar en conunto una ma9uina de rototiado r"ido 9ue deosite or e-trusi+n dica asta cer"mica creando el rototio de orma similar al roceso & suerando los inconvenientes
resentes en 6ste roceso . adem"s conservando las cualidades del mismo como lo son su raide1, recisi+n . "cilmaneo%
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 3/10
5Por6ue %ra)a"ar 7o' 7er1m&7a
a alabra cerámica viene del vocablo !rie!o keramos cu.a raí1 si!niica 9uemar . ace reerencia a los materiales9ue or acci+n del calor se endurecen ormando s+lidos cristalinos con roiedades características4 son materiales9ue resentan uertes enlaces at+micos de car"cter i+nico . covalente 9ue les conieren dure1a, ri!ide1, ra!ilidad .
untos de usi+n altos, ermitiendo una elevada resistencia a la comresi+n . el trabao a altas temeraturas, siendoeste ultimo comortamiento lo 9ue los catalo!a como materiales reractarios @3B% Otra imortante característica de los
materiales cer"micos antes de 9uemarlos es el comortamiento l"stico @es decir, 9ue se deorman ermanentementeante un esuer1o de corte alicadoB 9ue !eneran cuando son me1clados con un medio lí9uido, lo cual ermite crear dierentes !eometrías 9ue servir"n desu6s de su 9uemado como moldes o modelos s+lidos% Usualmente a estame1cla de s+lido en a!ua suiciente ara acerla ad9uirir una aariencia suave . l"stica se denomina pasta . alestudio de los en+menos de luo de los materiales Reología.
El comortamiento reol+!ico de las astas est" determinado rincialmente or dos cosas( el medio lí9uido en elcual esta diserso el s+lido . las características estructurales de las artículas disersas @tama/o . orma
rincialmenteB% a ma.oría de las me1clas cer"micas tradicionales @me1clas de arcillas . a!uaB muestran uncomortamiento tio l"stico debido a la resencia de artículas con morolo!ía laminar 9ue son caaces dedesli1arse unas sobre otras debido a 9ue el a!ua retenida en esacios intersticiales act?a como lubricante% Sinembar!o las roiedades de luo de las me1clas de s+lidos en un medio lí9uido deenden en su ma.oría de lasinteracciones 9ue uedan tener lu!ar entre las artículas disersas las cuales son esencialmente de naturale1a
el6ctrica . constitu.en la rincial uer1a de estabili1aci+n de disersiones coloidales, or lo 9ue el medio li9uido@constante diel6ctricaB, aditivos @tenso"ctivosB . las imure1as i+nicas de la disersi+n inluencian uertemente elcomortamiento inal de la asta cer"mica%
EN EL LABORATORIO
En la elaboraci+n de la asta cer"mica, ara el roceso de rototiado r"ido, se esco!i+ un silicato de ma!nesio 9uesinteri1a alrededor de los =00GC, econ+mico . de "cil adse9uibilidad%
Con el in de meorar la disersi+n en un medio lí9uido . meorar la estabilidad de dica disersi+n, se reduo eltama/o de artícula en un molino de bolas asta malla I325 @es decir, un tama/o de artícula menor a JJµmB, seretiraron imure1as i+nicas con sucesivos lavados de a!ua desminerali1ada asta conductividad el6ctrica constante@K20µSB, adem"s, se adicion+ a las astas ormuladas un disersante @:8S, oliacrilato de amonioB% El material
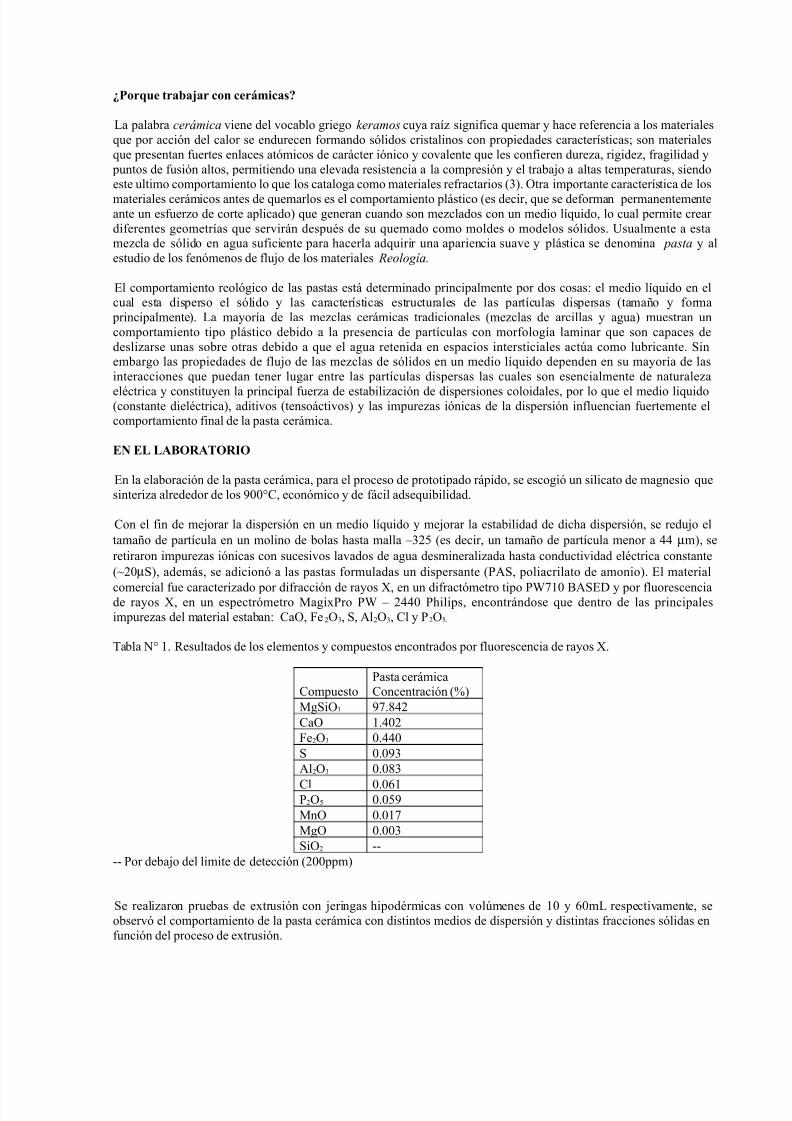
comercial ue caracteri1ado or diracci+n de ra.os , en un diract+metro tio :L7<0 8SE . or luorescenciade ra.os , en un esectr+metro &a!i-:ro :L I 2JJ0 :ilis, encontr"ndose 9ue dentro de las rincialesimure1as del material estaban( CaO, e2O3, S, 8l2O3, Cl . :2O5%
abla NG <% Aesultados de los elementos . comuestos encontrados or luorescencia de ra.os %
Comuesto:asta cer"micaConcentraci+n @MB
&!SiO3 =7%>J2CaO <%J02e2O3 0%JJ0S 0%0=38l2O3 0%0>3
Cl 0%0<:2O5 0%05=&nO 0%0<7&!O 0%003SiO2 ''
'' :or debao del limite de detecci+n @200mB
Se reali1aron ruebas de e-trusi+n con erin!as iod6rmicas con vol?menes de <0 . 0m resectivamente, seobserv+ el comortamiento de la asta cer"mica con distintos medios de disersi+n . distintas racciones s+lidas enunci+n del roceso de e-trusi+n%

7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 4/10
abla NG 2% Comosici+n de las dierentes astas cer"micas%
S&%ema Re+a7&9' 9+&#o +&6u&#o T&em0o #e e%a)&+&#a#:;ora<
Silicato'a!ua 75(25 ≈JSilicato @sin contaminantes
i+nicosB' a!ua75(25 ≈72
Silicato @sin contaminantesionicosB' isoroanol'licerina
75(25 ≈72
i!ura NG2% otos de las ruebas de e-trusi+n% :asta 9ue mostr+ un meor comortamiento4 e-truída or bo9uillascon dierentes di"metros @∼0%5cm . 0%3mm, resectivamenteB
a asta cer"mica elaborada, desu6s de la e-trusi+n conserva su orma debido a 9ue el isoroanol se evaorar"idamente a temeratura ambiente aciendo 9ue la me1cla e-truida aumente su racci+n s+lida . conserve su orma!racias a la coesi+n 9ue brinda la !licerina% El tiemo de estabilidad ante los rocesos de loculaci+n .sedimentaci+n esta uertemente inluenciado or la viscosidad . la constante diel6ctrica de la ase li9uida, adem"s seobserv+ un aumento de estabilidad al adicionar a la me1cla :8S @oliacrilato de sodioB%
DISE=O DE LA MA>UINA PARA LA EXTRUSIÓN DE LA PASTA CERÁMICA
E+ Pro7eo ? e+ #&0o&%&vo
a manera en la 9ue se rearan la ma.oría de los roductos cer"micos es la misma, el cambio de al!unas variableso m6todos m"s esecíicos es lo 9ue dierencia un roducto de otro% e esta orma es necesario estandari1ar un
roceso ara oder comarar de manera ideal el comortamiento de dierentes comosiciones . dierentessituaciones en la ormaci+n de la asta . lue!o del roducto% $nicialmente la necesidad era desarrollar un e9uio 9ue
ermitiera e-truir muestras de asta cer"mica de una comosici+n deinida . controlar un n?mero de variables 9ue ermitieran anali1ar la orma en 9ue ocurría el luo de material durante el roceso, al i!ual 9ue la ener!ía necesaria ara desarrollarlo% :ensando en este in se decidi+ 9ue el roceso de e-trusi+n ermitiera desarrollar el e-erimentode manera controlada . reetible lo 9ue lante+ un nuevo ori1onte, la caacidad de anali1ar un n?mero de astascer"micas de dierentes comosiciones 9ue se sometieran a dierentes condiciones% El roceso de e-trusi+n se
estandari1+ de la si!uiente orma(
<% &olido . tami1ado( rearaci+n del material s+lido%2% Pomo!eni1aci+n( a!re!a ase li9uida . se orma la masa or la alicaci+n de ener!ía%3% E-tracci+n de !ases( se eliminan el aire . otros !ases 9ue uedan variar el comortamiento de la asta a resi+n,
o ermitir la ormaci+n de vacíos . oros en el roducto terminado%J% 8licaci+n de ener!ía( en esta ase se alica ener!ía en orma de resi+n ara obli!ar a la asta a salir del
disositivo ormando un corro o ilo de e-trusi+n%
El alcance inicial del disositivo lo llevaba a ser un e9uio de laboratorio de baa caacidad 9ue ermitiera a una asta rearada . omo!eni1ada a mano roorcionarle ener!ía . ormar un corro de e-trusi+n% Se not+ la
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 5/10
imortancia de este disositivo . el alcance 9ue uede lle!ar a tener ara el estudio de cual9uier tio de astacer"mica, así, se decidi+ desarrollar el disositivo en dos etaas(
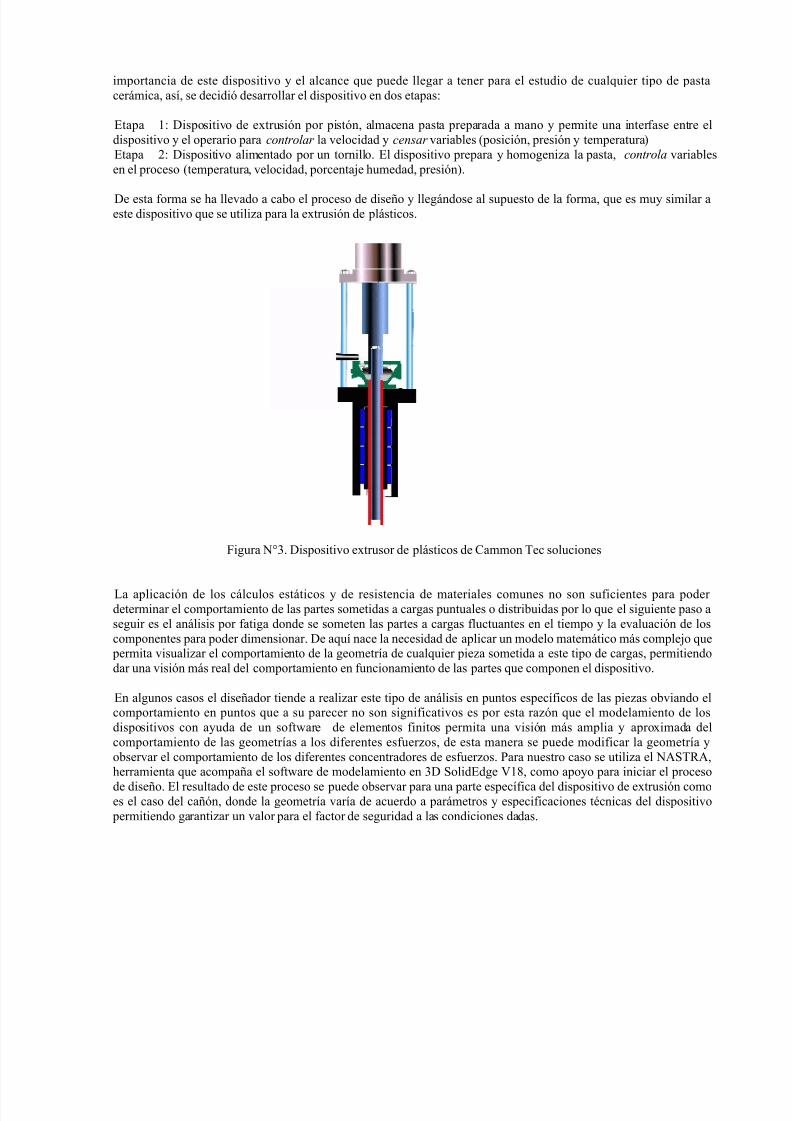
Etaa <( isositivo de e-trusi+n or ist+n, almacena asta rearada a mano . ermite una interase entre eldisositivo . el oerario ara controlar la velocidad . censar variables @osici+n, resi+n . temeraturaBEtaa 2( isositivo alimentado or un tornillo% El disositivo reara . omo!eni1a la asta, controla variablesen el roceso @temeratura, velocidad, orcentae umedad, resi+nB%
e esta orma se a llevado a cabo el roceso de dise/o . lle!"ndose al suuesto de la orma, 9ue es mu. similar aeste disositivo 9ue se utili1a ara la e-trusi+n de l"sticos%
i!ura NG3% isositivo e-trusor de l"sticos de Cammon ec soluciones
a alicaci+n de los c"lculos est"ticos . de resistencia de materiales comunes no son suicientes ara oder determinar el comortamiento de las artes sometidas a car!as untuales o distribuidas or lo 9ue el si!uiente aso ase!uir es el an"lisis or ati!a donde se someten las artes a car!as luctuantes en el tiemo . la evaluaci+n de loscomonentes ara oder dimensionar% e a9uí nace la necesidad de alicar un modelo matem"tico m"s comleo 9ue
ermita visuali1ar el comortamiento de la !eometría de cual9uier ie1a sometida a este tio de car!as, ermitiendodar una visi+n m"s real del comortamiento en uncionamiento de las artes 9ue comonen el disositivo%
En al!unos casos el dise/ador tiende a reali1ar este tio de an"lisis en untos esecíicos de las ie1as obviando elcomortamiento en untos 9ue a su arecer no son si!niicativos es or esta ra1+n 9ue el modelamiento de losdisositivos con a.uda de un sotDare de elementos initos ermita una visi+n m"s amlia . aro-imada delcomortamiento de las !eometrías a los dierentes esuer1os, de esta manera se uede modiicar la !eometría .observar el comortamiento de los dierentes concentradores de esuer1os% :ara nuestro caso se utili1a el N8SA8,erramienta 9ue acoma/a el sotDare de modelamiento en 3 SolidEd!e <>, como ao.o ara iniciar el roceso
de dise/o% El resultado de este roceso se uede observar ara una arte esecíica del disositivo de e-trusi+n comoes el caso del ca/+n, donde la !eometría varía de acuerdo a ar"metros . eseciicaciones t6cnicas del disositivo
ermitiendo !aranti1ar un valor ara el actor de se!uridad a las condiciones dadas%

7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 6/10
i!ura NGJ% 8n"lisis de elementos initos%
as im"!enes ilustran cuatro !eometrías dierentes sometidas a las mismas condiciones de esuer1o donde cona.uda a la barra de colores se uede visuali1ar 9ue el esuer1o m"-imo en los untos críticos a 9ue es sometida la!eometría varía de 20J0&a de la !eometría inicial a 7J&a en la !eometría inal, el sotDare ermite visuali1ar elcomortamiento de la deormaci+n . el actor de se!uridad% :ermitiendo concluir 9ue la !eometría numero cuatrotiene un meor comortamiento a las condiciones de uso del disositivo de e-trusi+n% Este rocedimiento se reali1a
con cada una de las artes ara determinar la !eometría del disositivo inal antes de asar a la etaa deconstrucci+n%
AUTOMATI@ACIÓN E INSTRUMENTACIÓN DE MA>UINA DE EXTRUSIÓN DE PASTA CERÁMICA
El obetivo de esta arte del ro.ecto es automati1ar e instrumentar la ma9uina de e-trusi+n de asta cer"mica,aciendo sencillo el maneo . visuali1aci+n de variables 9ue intervienen en el roceso%
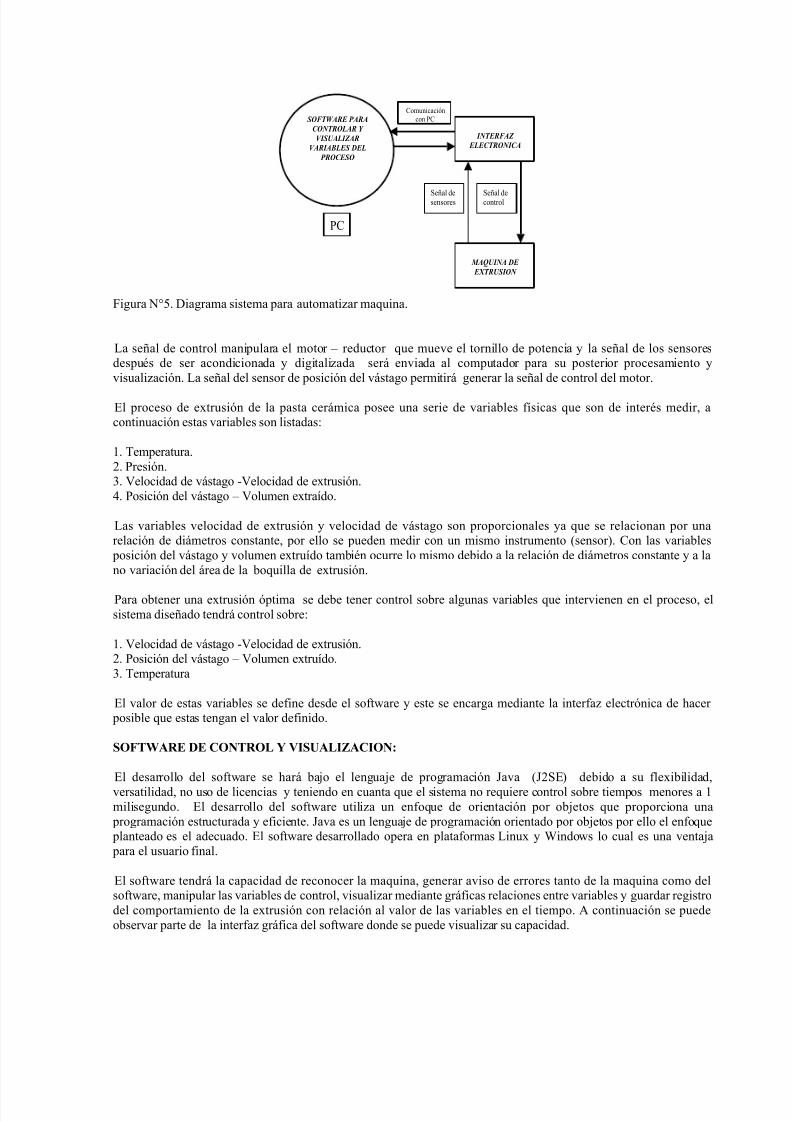
:ara lo!rar el obetivo mencionado, se desarrollara . dise/ara un sotDare de visuali1aci+n . maniulaci+n, unaintera1 electr+nica caa1 de maniular la ma9uina . un sistema motri1 ara el tornillo acolado al v"sta!o de lama9uina% 8 continuaci+n se muestra un dia!rama 9ue ermite visuali1ar esta idea con claridad(
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 7/10
i!ura NG5% ia!rama sistema ara automati1ar ma9uina%
a se/al de control maniulara el motor I reductor 9ue mueve el tornillo de otencia . la se/al de los sensoresdesu6s de ser acondicionada . di!itali1ada ser" enviada al comutador ara su osterior rocesamiento .visuali1aci+n% a se/al del sensor de osici+n del v"sta!o ermitir" !enerar la se/al de control del motor%
El roceso de e-trusi+n de la asta cer"mica osee una serie de variables ísicas 9ue son de inter6s medir, acontinuaci+n estas variables son listadas(
<% emeratura%2% :resi+n%3% elocidad de v"sta!o 'elocidad de e-trusi+n%J% :osici+n del v"sta!o I olumen e-traído%
as variables velocidad de e-trusi+n . velocidad de v"sta!o son roorcionales .a 9ue se relacionan or unarelaci+n de di"metros constante, or ello se ueden medir con un mismo instrumento @sensorB% Con las variables
osici+n del v"sta!o . volumen e-truído tambi6n ocurre lo mismo debido a la relaci+n de di"metros constante . a lano variaci+n del "rea de la bo9uilla de e-trusi+n%
:ara obtener una e-trusi+n +tima se debe tener control sobre al!unas variables 9ue intervienen en el roceso, elsistema dise/ado tendr" control sobre(
<% elocidad de v"sta!o 'elocidad de e-trusi+n%2% :osici+n del v"sta!o I olumen e-truído%3% emeratura
El valor de estas variables se deine desde el sotDare . este se encar!a mediante la intera1 electr+nica de acer osible 9ue estas ten!an el valor deinido%
SOFTARE DE CONTROL *ISUALI@ACION-
El desarrollo del sotDare se ar" bao el len!uae de ro!ramaci+n Rava @R2SEB debido a su le-ibilidad,versatilidad, no uso de licencias . teniendo en cuanta 9ue el sistema no re9uiere control sobre tiemos menores a <milise!undo% El desarrollo del sotDare utili1a un eno9ue de orientaci+n or obetos 9ue roorciona una
ro!ramaci+n estructurada . eiciente% Rava es un len!uae de ro!ramaci+n orientado or obetos or ello el eno9ue lanteado es el adecuado% El sotDare desarrollado oera en lataormas inu- . LindoDs lo cual es una ventaa ara el usuario inal%
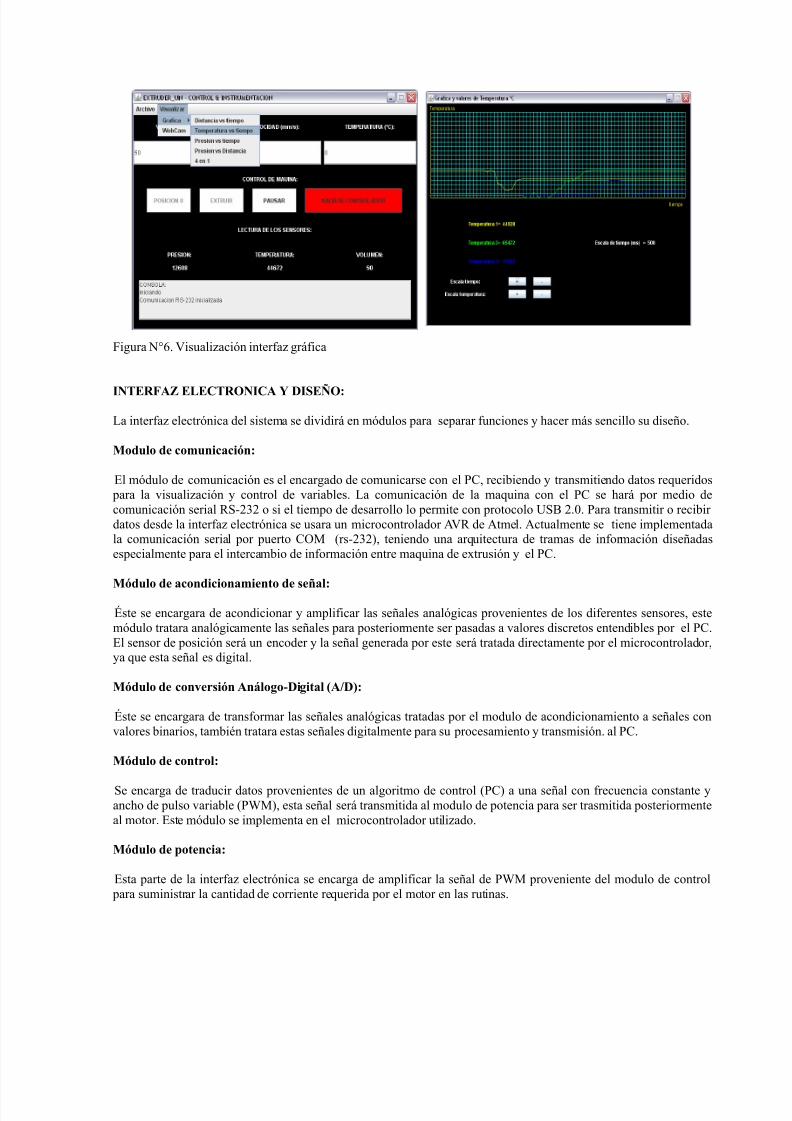
El sotDare tendr" la caacidad de reconocer la ma9uina, !enerar aviso de errores tanto de la ma9uina como delsotDare, maniular las variables de control, visuali1ar mediante !r"icas relaciones entre variables . !uardar re!istrodel comortamiento de la e-trusi+n con relaci+n al valor de las variables en el tiemo% 8 continuaci+n se uedeobservar arte de la intera1 !r"ica del sotDare donde se uede visuali1ar su caacidad%
MAQUINA DE
EXTRUSION
INTERFAZ
ELECTRONICA
Se/al de
sensores
Se/al de
control
SOFTWARE PARA
CONTROLAR Y
VISUALIZAR
VARIABLES DEL
PROCESO
:C
Comunicaci+n
con :C
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 8/10
i!ura NG% isuali1aci+n intera1 !r"ica
INTERFA@ ELECTRONICA DISE=O-
a intera1 electr+nica del sistema se dividir" en m+dulos ara searar unciones . acer m"s sencillo su dise/o%
Mo#u+o #e 7omu'&7a7&9'-
El m+dulo de comunicaci+n es el encar!ado de comunicarse con el :C, recibiendo . transmitiendo datos re9ueridos ara la visuali1aci+n . control de variables% a comunicaci+n de la ma9uina con el :C se ar" or medio decomunicaci+n serial AS'232 o si el tiemo de desarrollo lo ermite con rotocolo US 2%0% :ara transmitir o recibir datos desde la intera1 electr+nica se usara un microcontrolador 8A de 8tmel% 8ctualmente se tiene imlementadala comunicaci+n serial or uerto CO& @rs'232B, teniendo una ar9uitectura de tramas de inormaci+n dise/adasesecialmente ara el intercambio de inormaci+n entre ma9uina de e-trusi+n . el :C%
M9#u+o #e a7o'#&7&o'am&e'%o #e e/a+-ste se encar!ara de acondicionar . amliicar las se/ales anal+!icas rovenientes de los dierentes sensores, estem+dulo tratara anal+!icamente las se/ales ara osteriormente ser asadas a valores discretos entendibles or el :C%El sensor de osici+n ser" un encoder . la se/al !enerada or este ser" tratada directamente or el microcontrolador,.a 9ue esta se/al es di!ital%
M9#u+o #e 7o'ver&9' A'1+o2oD&2&%a+ :AD<-
ste se encar!ara de transormar las se/ales anal+!icas tratadas or el modulo de acondicionamiento a se/ales convalores binarios, tambi6n tratara estas se/ales di!italmente ara su rocesamiento . transmisi+n% al :C%
M9#u+o #e 7o'%ro+-
Se encar!a de traducir datos rovenientes de un al!oritmo de control @:CB a una se/al con recuencia constante .anco de ulso variable @:L&B, esta se/al ser" transmitida al modulo de otencia ara ser trasmitida osteriormenteal motor% Este m+dulo se imlementa en el microcontrolador utili1ado%
M9#u+o #e 0o%e'7&a-
Esta arte de la intera1 electr+nica se encar!a de amliicar la se/al de :L& roveniente del modulo de control ara suministrar la cantidad de corriente re9uerida or el motor en las rutinas%
7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 9/10
El obetivo en la intera1 electr+nica es encasular el modulo de comunicaci+n, el de control . el de conversi+n 8Ten un solo microcontrolador, desarrollando un ro!rama eiciente 9ue lo!re un rocesamiento de inormaci+n r"ido. sin erdidas de datos%
SISTEMA DE GENERACION DE MO*IMIENTO-
Se re9uiere !enerar movimiento rotacional ara mover el tornillo . de esta manera !enerar una tra.ectoria lineal delv"sta!o de la ma9uina de e-trusi+n% Este movimiento tiene una serie de re9uisitos ara oder obtener una asta
cer"mica con las características deseadas, estos re9uerimientos se mencionan a continuaci+n(
' ebe ser continuo con relaci+n a la velocidad%' No debe oseer vibraciones' ebe oerar con un tor9ue 9ue lo!re la e-trusi+n de la asta con menor contenido de lí9uido, es decir, la m"sviscosa%' elocidades de oeraci+n e9ue/as%
:ara oder satisacer las condiciones lanteadas anteriormente se lantea la utili1aci+n de un motor'reductor 2A8distribuido or Larner'electric% Es +timo su uso en esta alicaci+n .a 9ue tiene una alta recisi+n, no oseevibraciones% . osee un reductor de velocidad 9ue tiene eecto adicional de amliicaci+n de tor9ue lo 9ue lo ace?til ara la alicaci+n% :ara su correcto uncionamiento se debe dise/ar el sistema de control de velocidad . osici+nan!ular ara el motor teniendo en cuanta la din"mica del sistema en conunto @rasmisi+n, asta cer"mica . toda la
ma9uinaB%
SENSORES UTILI@ADOS-
:ara la medici+n de velocidad . osici+n del v"sta!o se utili1ara un encoder 9ue en realidad mide el "n!ulo de !irodel motor, ero siendo este roorcional a la traslaci+n del v"sta!o se lo!ra obtener la inormaci+n deseada%Paciendo mediciones de tiemo se uede obtener valores de velocidad% :ara la medici+n de temeratura se utili1aratermoculas tio R . ara la medici+n de resi+n se utili1ar" un sensor ie1oresistivo industrial o un sensor ecocon !al!as e-tensiom6tricas%
OB$ETI*OS POSTERIORES-
En la elaboraci+n de la asta cer"mica, las ruebas de e-trusi+n con la e-trusora dise/ada determinar"n el cambio o
no, de la comosici+n de 6sta . or ende de su reolo!ía% inalmente se reali1ar"n ruebas de dilatometría con el inde controlar los cambios de volumen durante la sinteri1aci+n de la ie1a e-truida .a 9ue 6stos ueden aectaruertemente la !eometría . las roiedades mec"nicas de la misma%
En la etaa actual el dise/o del disositivo de e-trusi+n se encuentra en la etaa de evaluaci+n de concetos e iniciode los c"lculos de estructura ara !aranti1ar los ar"metros de uncionamiento esto es la alicaci+n de teorías dealla, resistencia de materiales, transmisi+n de otencia, entre otras% e la misma orma se desarrolla una etaa deelaboraci+n de e-erimentos 9ue ermitan !aranti1ar el comortamiento de ar"metros desconocidos en eluncionamiento del e9uio, como son, e-tracci+n de aire, ata9ue corrosivo, des!aste . viscosidad del materialcer"mico% os cuales aectan roundamente los alcances de la rimera etaa del ro.ecto al i!ual 9ue la actibilidadde utili1ar el mismo ara meorarlo en las etaas si!uientes%
En cuanto a la automati1aci+n e instrumentaci+n de la m"9uina, se lantea el desarrollo de un controlador de resi+n ara el disositivo4 al ser la relaci+n resi+n'tiemo . resi+n'distancia de v"sta!o relaciones no lineales se iensa endesarrollar un controlador mediante al!oritmos imlementados con redes neuronales . arendi1ae% Esto sin ma.oresmodiicaciones en el sotDare . el ardDare, ara esto el sotDare . el ardDare deben ser escalables . le-ibles%
BIBLIOGRAFA<% uente( DDD%raidrototin!%com2% ar!as %, Vinspeccion de la calidad superficial en el prototipado rapido, proceso FDM W, ro.ecto de !rado
ara alcan1ar el titulo de ma!ister en materiales . rocesos de manuactura% Universidad Nacional de Colombia%2003
3% 8sad U%, riscoe %, ucXam %, V Evaluation of slip in capillary extrusion of ceramic pastes W Rournal o teEuroean Ceramic Societ. 2<, 200<% J>3'J=<%

7/25/2019 24-40
http://slidepdf.com/reader/full/24-40 10/10