Embed Size (px)
Citation preview

Automatismos eléctricos industriales - 5
AUTOMATISMOS CABLEADOS
APARATOS DE MANIOBRA AUTOMÁTICA-2


CONTENIDO 1 DETECTORES INDUCTIVOS Y CAPACITIVOS
A) CARACTERÍSTICAS GENERALES ���� CARACTERÍSTICAS ELÉCTRICAS ���� CARACTERÍSTICAS MECÁNICAS ���� CARACTERÍSTICAS DE FIABILIDAD ���� CARACTERÍSTICAS FUNCIONALES
B) SEÑALES DE SALIDA. TECNICAS DE CONEXIÓN B.1) SALIDA DIGITAL Todo/Nada.
• DOS HILOS � CORRIENTE CONTINUA � CORRIENTE ALTERNA
• TRES HILOS � CORRIENTE CONTINUA
SALIDA DE TRES HILOS EN CC DE TIPO NPN Esquema típico con transistor NPN y conexión de la carga. SALIDA DE TRES HILOS EN CC DE TIPO PNP Esquema típico con transistor PNP y conexión de la carga.
� CORRIENTE ALTERNA SALIDA DE TRES HILOS EN CORRIENTE ALTERNA
• CUATRO HILOS SALIDA DE CUATRO HILOS DE TIPO NPN SENSOR DE CUATRO HILOS TIPO PNP
B.2) SALIDA ANALÓGICA C) CONFIGURACIONES D) VELOCIDAD DEL OBJETO E) INTERVALO MÍNIMO F) MONTAJES
F.1) INTERFERENCIAS MÚTUAS F.2) METALES CIRCUNDANTES F.3) RUIDOS ELECTROMAGNÉTICOS F.4) ASOCIACIONES ELÉCTRICA
SENSORES DE CC Y CA DE 2 HILOS ASOCIACIÓN SERIE. ASOCIACIÓN PARALELO. SENSORES DE 3 HILOS ASOCIACIÓN SERIE. ASOCIACIÓN PARALELO.
G) CLASES DE PROTECCION
−−−− Norma NEMA
−−−− Norma DIN H) COLOR Y NUMERACIÓN DE LOS HILOS
2 DETECTORES FOTOELÉCTRICOS
A) COMPOSICIÓN B) PRINCIPIO DE FUNCIONAMIENTO C) PROCEDIMIENTOS DE DETECCIÓN D) SISTEMAS BÁSICOS UTILIZADOS
���� SISTEMA DE BARRERA ���� SISTEMAS DE REFLEXIÓN (reflex)
- Sistema reflex - Sistema reflex polarizado
���� SISTEMAS DE PROXIMIDAD - Sistema de proximidad - Sistema de proximidad con borrado del plano posterior
E) MODOS DE FUNCIONAMIENTO F) CONEXIONES. EJEMPLOS DE FUNCIONAMIENTO G) ASOCIACIONES ELÉCTRICAS
3 REPETICIÓN DEL MOVIMIENTO DE UN MÓVIL
A) SELECTORES DE POSICIÓN B) INTERRUPTORES DE CONTROL DE NIVEL
4 CONTROL DE PRESIÓN. PRESOSTATOS Y VACUOSTATOS. 5 CONTROL DE LA TEMPERATURA.


1 DETECTORES INDUCTIVOS Y CAPACITIVOS En el momento del diseño de aplicaciones donde se usen sensores, se deben tener en cuenta una serie de características técnicas de este tipo de sensores que pueden afectar a su comportamiento y hacer que éste no sea el adecuado o esperado. A) CARACTERÍSTICAS GENERALES Para la elección de un sensor se deben tener en cuenta una serie de características técnicas (eléctricas, mecánicas, de detección y de fiabilidad) que el fabricante nos proporciona. A continuación, se analizan una serie de ellas, y se indican algunos valores orientativos de diversos distribuidores.
- Características eléctricas - Características mecánicas - Características de fiabilidad - Características de detección - Características funcionales
� CARACTERÍSTICAS ELÉCTRICAS
− ALIMENTACIÓN: Indica el margen de tensión en el que podemos alimentar el sensor. Una tensión típica de funcionamiento es de 12 a 24 V. para continua y de 100 a 220 V. para alterna. Algunos sensores permiten alimentación en continua o en alterna por los mismos bornes y con un amplio margen de tensión, típicamente 12-240 V.
− CONSUMO: Indica el valor máximo de corriente que el sensor puede
llegar a demandar de la fuente de alimentación. Para sensores de corriente continua suele ser del orden de 8 mA a 12V , 15 mA a 24 V y para corriente alterna de 2,2 mA a 200 V.
− CORRIENTE DE CARGA NOMINAL: Es la corriente que puede
gobernar de forma continuada. Una carga que demande una corriente superior a la nominal puede destruir o acortar la vida del elemento de conmutación.
− CORRIENTE DE CARGA MÍNIMA : Valor mínimo de carga que necesitan algunos tipos de salida de
sensores.
− CORRIENTE RESIDUAL : La corriente residual o corriente de fuga es la que circula a través de la carga cuando el sensor está desactivado. Algunos fabricantes proporcionan esta característica por medio de gráficas.
− TENSIÓN RESIDUAL : La tensión residual es la caída de tensión que se produce en el circuito de
conmutación cuando el dispositivo de salida está activado y por él circula la intensidad de carga nominal, puede estar en torno a los 2.5 V.
− PROTECCIONES ELÉCTRICAS : Un sensor puede presentar diversas protecciones eléctricas como:
protección ante cortocircuito de carga, ante inversión de polaridad de la alimentación y ante las sobretensiones que se producen con cargas inductivas.
− RESISTENCIA DE AISLAMIENTO : La resistencia de aislamiento es la misma que debe existir entre cada
terminal del sensor, y entre los terminales y partes no conductoras del sensor. El fabricante especifica este valor en megaohmios y las condiciones en las que se efectuó la prueba, esta resistencia puede ser del orden de 500 megaohmios con 500 V. de tensión en corriente continua.
− RIGIDEZ ELÉCTRICA : Representa la máxima tensión que se puede aplicar entre distintas partes del sensor
sin que se produzca la rotura del material que hace de dieléctrico. Típicamente, el fabricante especifica la tensión a la que se somete el sensor para realizar la prueba (por ejemplo: 2000 V. en corriente alterna a 50/60 Hz durante 1 minuto).
− TIEMPO DE RESPUESTA: Es el tiempo de retraso que se produce desde que el objeto a detectar entra en
la zona activa del sensor y se produce un cambio en la señal de salida del sensor.
Fig. 1.1

− SENSORES DE PROXIMIDAD DE MONTAJE ENRASADO : Característica según la cual, el sensor puede
estar rodeado de metal u otros materiales hasta el borde de su superficie activa, sin que se vean afectados sus valores característicos.
− SENSORES DE PROXIMIDAD NO-ENRASADOS : Sensores que requieren una zona libre cuando se
montan sobre metal u otros materiales para poder mantener los valores característicos de los sensores de proximidad.
� CARACTERÍSTICAS MECÁNICAS
− EJE DE REFERENCIA : El eje perpendicular al centro de la superficie activa de un sensor de proximidad.
− SUPERFICIE ACTIVA : En un sensor de proximidad sin contacto, la superficie que emite el campo eléctrico y en el cual el sensor reacciona a la aproximación de un objeto.
− ZONA LIBRE : Área que rodea al sensor de proximidad, que debe quedar libre de materiales que afecten a
sus valores característicos.
− APROXIMACION AXIAL : Aproximación de la placa de calibración de un sensor, en forma centrada al eje de referencia.
− APROXIMACION RADIAL : Aproximación de la placa de calibración en ángulo recto, con relación al eje de
referencia de la superficie activa, en un sensor de proximidad.
− GRADO DE PROTECCIÓN: Indica la protección contra el contacto y penetración de cuerpos extraños como suciedad, agua, polvo, o cuerpos sólidos externos al sensor, normalmente IP67 o IP68.
− CARCASA : Indica el material con que está echa la carcasa, de este depende en gran medida la resistencia
del sensor ante exigencias de trabajo como golpes, calor o el ataque de sustancias químicas.
− FRECUENCIA DE OPERACIÓN: La frecuencia de respuesta es un concepto referido al número máximo de veces que puede actuar en un segundo un interruptor de proximidad. Esta frecuencia se mide según la norma CENELEC EN 50010.Por ex: 100 Hz para c.c. e 10 Hz. para c.a.
− RESISTENCIA A LAS VIBRACIONES: Indica la vibración mecánica máxima a la que puede trabajar el
sensor. Se indica el valor pico a pico de la vibración y la frecuencia máxima (10 a 55 Hz / 1.5 mm de amplitud pico a pico).
− RESISTENCIA A LOS GOLPES : Establece el impacto a que se puede someter el sensor para que siga
operando (durabilidad mecánica: 500 m/seg2 (aprox. 50G’s)) o para que no se destruya (1000 m/seg2). • CARACTERÍSTICAS DE FIABILIDAD
− VIDA ÚTIL ELÉCTRICA : Indica el número de operaciones eléctricas que garantiza el fabricante, es número muy elevado.
− VIDA ÚTIL MECÁNICA : Número de operaciones que garantiza el fabricante para el relé electromagnético
en los sensores que lo incorporan en su salida � CARACTERÍSTICAS DE DETECCIÓN
− DISTANCIA DE CONMUTACION: Distancia en la cual una pieza estándar que se aproxime hacia la superficie activa del sensor, genera un cambio de señal.
El fabricante nos proporciona normalmente la distancia de conmutación o detección nominal (Sn), que es la distancia a la que un sensor de proximidad detecta el objeto estándar o patrón. Esta distancia varía con las tolerancias de fabricación, condiciones de temperatura, alimentación (valores que el fabricante suele indicar en % de la distancia de detección nominal). Así se pueden definir las siguientes distancias de conmutación.
o DISTANCIA NOMINAL DE CONMUTACION: La distancia de conmutación de un sensor a la tensión de

alimentación y temperatura nominales, sin compensación para las tolerancias de fabricación. o DISTANCIA REAL DE CONMUTACION (SR): Es la distancia de conmutación, teniendo en cuenta las
tolerancias de fabricación y medida a la tensión y temperatura nominales. La desviación máxima de la distancia nominal de conmutación es ±10%. La distancia real de conmutación se especifica por 0,9 Sn < Sr < 1,1 Sn.
o DISTANCIA DE CONMUTACION UTIL (SU): La distancia de conmutación de un sensor de proximidad dentro de los márgenes de tensión de alimentación y temperatura. La desviación máxima de la distancia real de conmutación es ±10%. La distancia útil de conmutación se especifica por 0,9 Sr < Su < 1,1 Sr.
o DISTANCIA DE CONMUTACION DE TRABAJO (Sa): Distancia dentro de la cual se garantiza la fiabilidad del funcionamiento, independientemente de las tolerancias de fabricación o de las condiciones ambientales. Los valores están entre 0 y el menor valor de la distancia de conmutación útil.
En la distancia de conmutación también influyen las propiedades magnéticas del metal a detectar, así en los metales ferromagnéticos, las pérdidas producidas por las corrientes parásitas son mucho mayores que en otro tipo de materiales. Para calcular la distancia de conmutación nominal de un metal distinto del acero ST 37 es necesario aplicar unos factores de corrección a la distancia nominal. En la siguiente tabla se pueden ver los factores de algunos metales.
Material Factor ACERO ST 37 1 LATÓN 0.35 - 0.5 COBRE 0.25 - 0.45 ALUMINIO 0.35 - 0.5
ACERO INOX. 0.6 - 1 Sn(Material)= Sn(Acero ST 37) * Factor(Material)
Fig. Tabla 1.2
− OBJETO A DETECTAR : Además si el tamaño del metal a detectar es inferior al tamaño del objeto estándar la distancia de detección disminuye. Este dato informa sobre las características del objeto, a veces llamado objeto estándar, con el cual el fabricante garantiza una detección correcta. El fabricante proporciona una gráfica donde se puede ver la relación que guardan el tamaño del objeto y la distancia de detección. Fig. 1.3
− REPETIBILIDAD: Diferencias en el punto de conmutación que se
producen durante 8 horas a una temperatura de 15-30 °C y con una desviación de la tensión nominal de ± 5%.
− DISTANCIA DE DETECCIÓN: El fabricante nos da la distancia de
detección nominal, la cual está medida para el acercamiento axial a la cara activa del sensor de una placa de acero ST 37 de un milímetro de espesor.
− HISTÉRESIS: La histéresis o distancia diferencial es la diferencia entre la
posición de actuación, cuando el objeto se acerca, y la distancia de reposición, cuando el objeto se aleja. Se expresa en % de la distancia nominal, evitando un transitorio inicial, suele ser aproximadamente de 10% de la distancia nominal. Fig. 1.4
− SENSIBILIDAD: Algunos sensores con salida analógica incluyen un
potenciómetro que permite realizar un ajuste de la distancia de detección de los objetos, dentro de la distancia de detección nominal.
� CARACTERÍSTICAS FUNCIONALES
− INDICADORES DE OPERACIÓN : En los sensores con salida analógica, se dospone de un potenciómetro que permite el ajuste de la distancia de detección de un objeto, de forma que este pueda ser detectado a una determinada distancia y no a una superior, siempre dentro del rango de operación.
Algunos sensores disponen de indicadores luminosos, normalmente son diodos LED, que sirven para poder conocer el estado del sensor. Existen dos tipos de indicadores:
- Indicador de operación : se ilumina cuando detecta el objeto.
Fig. 1.3
Fig. 1.4

- Indicador de estabilidad : se ilumina cuando el objeto está en la zona de detección inestable.
Fig. 1.5
B) SEÑALES DE SALIDA. TECNICAS DE CONEXIÓN Se ofrecen detectores con las siguientes salidas: (Fig. 1.6 ).
Fig. 1.6
− cierre NO (NA): el transistor o tiristor de salida se activa en presencia de una pantalla, − apertura NC: el transistor o tiristor de salida se bloquea en presencia de una pantalla, − inversor NO(NA)/NC: dos salidas complementarias, una activada y la otra bloqueada en presencia de una
pantalla. Estando el detector alimentado a tensión alterna, la cercanía de un objeto metálico adecuado a la cara sensible activará el circuito interior: el tipo NO(NA) conducirá y el NC no conducirá. La carga habitual es un relé. Correspondiendo al mecanismo de la Fig. 1.7 , se han utilizado dos detectores inductivos para la detención del motor en los extremos. El B1 estará a la derecha y el B2 a la izquierda. Una ventaja de este tipo de detectores en c/a es su simplicidad (montaje a dos hilos) y su capacidad de conmutación a diversas tensiones. El modelo de la Fig. 1.8 realiza su función a tensiones entre 20 y 250 V. Por estar en serie con la carga son muy sensibles a las sobreintensidades. Por esta razón han de estar protegidos por un fusible rápido de pequeño calibre (0,25 ó 0,50 A). Todos los detectores inductivos conducen ligeramente, incluso en ausencia de material metálico activador en su cara sensible. Este es un dato importante cuando el detector conmuta relés miniatura para cuyo activado se precisan miliamperios. En este apartado se muestran los distintos tipos de salida de los sensores, aunque normalmente tienen salida todo/nada (salida digital), debido a que son detectores de proximidad fundamentalmente, también hay sensores capaces de proporcionar una señal de salida proporcional a la distancia entre el objeto a detectar y el sensor (salida analógica).
- Salida digital - Salida analógica

a b
Fig. 1.7
Fig. 1.8
� TECNICAS DE CONEXIÓN Los detectores se dividen en dos grandes categorías:
− Técnica de “2 hilos”. Un detector de dos hilos se comporta eléctricamente como un final de carrera que se abre o se cierra al ser activado.
Rango de tensión: Suele ser de: - 24-240 V, 50/60 Hz para alterna - 24-210 V para continua Inconveniente: siempre existe en él una pequeña corriente de fuga en estado NA. Esto puede ocasionar el activado permanente de ciertos relés que precisan muy poca intensidad en sus bobinas, para ser activados. En el detector a tres hilos ya no existe este inconveniente.
− Técnica de “3 hilos”. Se alimenta en corriente continua, y admite las versiones PNP o NPN según la polaridad que deba tener el contactor o relé a activar

B.1) SALIDA DIGITAL Todo/Nada.
Fig. Tabla 1.9
Estado sólido Una salida de estado sólido , al contrario que una de relé electromagnético, no tiene partes mecánicas móviles, sino que utiliza componentes semiconductores lo que le confiere prácticamente un número de operaciones ilimitado. Además se evitan las posibles anomalías que pueden producirse en un contacto mecánico al abrirse o cerrarse este, tales como las debidas a los rebotes de los contactos o a las interferencias que produce el arco eléctrico. • DOS HILOS Los sensores con salida a dos hilos se alimentan en SERIE a través de la corriente de la carga, por lo que cuando el sensor está abierto deja pasar una pequeña corriente necesaria para su alimentación, del orden de algunos mA y del mismo modo cuando el sensor está activo mantiene una tensión residual entre sus bornes para alimentarse. Fig. 1.10 Existen las siguientes versiones de detectores de 2 hilos:
– alimentación de corriente continua, no polarizados, – alimentación de corriente alterna/continua.
En caso de puesta en serie con un contacto mecánico, el detector no se alimenta cuando el contacto está abierto. A su cierre, el detector sólo funciona una vez que transcurre el tiempo de retraso en la disponibilidad . − CORRIENTE CONTINUA. Esquema interno típico y conexión de la carga
Fig. 1.11 Tipo de conexión de 2 hilos
− CORRIENTE ALTERNA. Esquema interno típico y conexión de la carga
Fig. 1.12 Tipo de conexión de 3 hilos
Fig. 1.10

• TRES HILOS En los sensores con salida de tres hilos, dos de ellos son para alimentar el sensor y el tercero es la señal de salida, a la cual se conecta uno de los terminales de la carga. Fig. 1.13 Ciertos aparatos tienen un hilo adicional para transmitir la señal complementaria (tipo 4 hilos NO + NC). Suelen estar protegidos contra la inversión de los hilos de alimentación. La mayoría también lo están contra sobrecargas y cortocircuitos. − CORRIENTE CONTINUA. Una salida de tres hilos de corriente continua puede ser de tipo PNP ó NPN.
o aparatos básicos con salida PNP (carga a potencial negativo) o salida NPN (carga a potencial positivo), o aparatos programables que, dependiendo de la polaridad de la conexión, permiten realizar una de las
cuatro funciones PNP/NO, PNP/NC, NPN/NO, NPN/NC. La alimentación en c/c suele oscilar entre 10 y 60 V. SALIDA DE TRES HILOS EN CC DE TIPO NPN Esquema típico con transistor NPN y conexión de la carga. Un sensor con salida tipo NPN activa la salida conectando o desconectando la carga al positivo de la alimentación. Usa un transistor bipolar NPN ( T ) trabajando en conmutación. Se suele añadir además protección contra inversión de polaridad de la alimentación ( D1), y para eliminar los picos de tensión que se producen con cargas inductivas ( D2 ). Fig. 1.14 SALIDA DE TRES HILOS EN CC DE TIPO PNP Esquema típico con transistor PNP y conexión de la carga. Un sensor con salida tipo PNP activa la salida conectando o desconectando la carga al negativo de la alimentación. Usa un transistor bipolar PNP (T) trabajando en conmutación. Se suele añadir además protección contra inversión de polaridad de la alimentación ( D1), y para eliminar los picos de tensión que se producen con cargas inductivas ( D2 ). Fig. 1.15 Los dos esquemas de las Fig. 1.16 son del tipo PNP en sus dos variantes NO(NA) y NC, según que deba producirse activado o desactivado en presencia de objeto metálico.
CONEXIÓN PNP CON CONTACTO NO CONEXIÓN PNP CON CONTACTO NC
Fig. 1.16 DETECTOR - SALIDA A TRES HILOS – CONEXI ÓN PNP Los dos esquemas de las Fig. 1.17 son del tipo PNP en sus dos variantes NO(NA) y NC, según que deba
Fig. 1.13
Fig. 1.14
Fig. 1.15

producirse activado o desactivado en presencia de objeto metálico.
CONEXIÓN NPN CON CONTACTO NO(NA) CONEXIÓN NPN CON CONTACTO NC
Fig. 1.17 DETECTOR - SALIDA A TRES HILOS – CONEXI ÓN NPN Normalmente estos detectores en c/c se utilizan acoplados a relés especiales alimentados a tensión normal de la red. Estos aparatos suministran tensión continua al detector, amplifican la señal que envía éste y activan un contacto interior, igual que los relés vistos anteriormente (Fig. 1.18 ). A la derecha del esquema se ofrecen los datos de un modelo de dicho relé. Ejemplo: Aplicamos dos detectores inductivos en c/c en el accionamiento a impulsos del motor de la Fig. 1.19-a Una pieza Q avanza o retrocede a lo largo de un husillo actuado por un motorreductor MR. Paralelo al husillo se mueve en ambas direcciones un tablero que lleva acoplados dos detectores. La pieza Q deberá estar siempre entre ambos. Cuando el tablero se mueve hacia la derecha y se enfrentan Bl y Q, el motor girará llevando a Q hacia la derecha, ídem con B2.
a b
Fig. 1.19
Fig. 1.18

− CORRIENTE ALTERNA SALIDA DE TRES HILOS EN CORRIENTE ALTERNA
En la salida de estado sólido a tres hilos para corriente alterna la salida se activa mediante un dispositivo electrónico como un tiristor o triac. Fig. 1.20 • CUATRO HILOS Los sensores con salida de cuatro hilos, usan dos para la alimentación y los otros dos proporcionan dos señales de salida, una antivalente de la otra. Puede por tanto actuar sobre dos contactores o relés. Esta variante se le llama de doble conmutación . Fig. 1.21 SALIDA DE CUATRO HILOS DE TIPO NPN
Fig. 1.22
SENSOR DE CUATRO HILOS TIPO PNP
Fig. 1.23
Caso particular: CONTADOR DE IMPULSOS Una variante interesante del detector inductivo a dos y tres hilos la constituye el contador de impulsos. Instalado para la detección en una disposición como la que muestra la Fig. 1.24 , "cuenta" el número de activados por minuto que experimenta. Si ese valor es inferior al prefijado en el propio detector, éste no produce el activado del relé o contador. Si es igual o mayor, lo produce. Un detector de frecuencia de impulsos puede tener un rango de 6 - 150 impulsos / min, o de 120 -3000 impulsos / min, etc. Es posible utilizar este detector para controlar la velocidad de un motor o de algún eje de la máquina que
Fig. 1.20
Fig. 1.21

arrastra. Efectivamente, podemos colocar un disco como el de la figura anterior (con varios resaltes o con uno solo) en un extremo libre del eje en cuestión e instalar el detector. Su activado a cierta velocidad puede servirnos para pasar un motor de estrella a triángulo, para arrancar otro motor, etc.
Fig. 1.24
Nota: Cuando los contadores tienen bobina para 230 V en corriente alterna, el detector inductivo a tres hilos no es operativo porque actúa en continua. Para tal caso se construyen bloques de salida, que contienen:
- Un transformador / rectificador para proporcionar corriente continua al detector.
- Un relé interno auxiliar, activado por el detector. Este relé interno tiene un contacto NANC que puede realizar conmutaciones en cualquier tensión, ya que es independiente del mecanismo detector (Fig. 1.25 ).
Fig. 1.25
En el circuito de la Fig. 1.26 , el contador KM tiene una tensión de activado de 48 V. Si se encuentra activado, el acercamiento de un objeto metálico al detector provoca su desactivado.
Fig. 1.26

B.2) SALIDA ANALÓGICA −−−− Señal de corriente. La corriente de salida varía en función de la magnitud de la medida. Márgenes típicos (en mA): [0 ÷ +20], [+4 ÷ +20], [-20 ÷ +20] Características:
- La impedancia de la carga debe ser baja (típicamente inferior a 300 ohmios). - Inmunidad al ruido alta. - Admite longitudes de cableado muy superiores a los de salida analógica de tensión.
−−−− Señal de tensión. La tensión de salida varía en función de la magnitud de la medida.
Márgenes típicos (en V): [0 ÷ +15], [+1 ÷ +5], [0 ÷ +10], [-10 ÷ +10], [-5 ÷ +5] Características:
- La caída de tensión en los hilos debe ser muy baja. - La impedancia de la carga debe ser muy superior a la impedancia de salida del sensor. Típicamente la
carga debe superar 1 K. - Inmunidad al ruido baja. - La longitud del cableado no debe ser muy grande (generalmente menor de 10 m.).
C) CONFIGURACIONES Hay dos configuraciones posibles, tanto para los sensores cilíndricos como para los de sección rectangular: • Sensores enrasados , son aquellos sensores en los que el cuerpo metálico se prolonga hasta la cabeza
sensora, evitando, la posible dispersión del flujo electromagnético, concentrándolo en la parte frontal, y reduciendo el efecto de los metales circundantes y las interferencias mutuas al instalar varios sensores inductivos contiguos.
Fig. 1.27
• Sensores no enrasados, el recubrimiento metálico exterior no llega hasta el borde de la cabeza sensora, así
el flujo se dispersa por los laterales de la cabeza sensora.
Fig. 1.28
Al elegir un sensor inductivo se debe tener en cuenta que, en un sensor enrasado el flujo magnético es bastante restringido, lo que provoca una disminución de la distancia de detección. Para obtener una misma distancia de detección con un sensor enrasado y uno no enrasado, la superficie de detección del primero debe ser

el doble que la del segundo. D) VELOCIDAD DEL OBJETO Para ser detectado el objeto debe estar presente en el área de detección un tiempo superior al tiempo de accionamiento ( tiempo que tarda en cambiar la señal de salida desde que el objeto entra en la zona de detección). Para esto debe cumplir:
1 / F < ( L + l ) / V
Siendo: F frecuencia de operación. V velocidad del objeto. L longitud del objeto. L longitud de la zona del rango de operación a la distancia de trabajo. E) INTERVALO MÍNIMO La distancia mínima entre dos objetos consecutivos está limitada por: Las líneas del campo magnético producido por la bobina, se manifiestan en un espacio mayor que el indicado por el fabricante en el rango de operación, aunque son zonas donde no se garantiza la detección, puede suceder que un objeto no haya salido de la zona de detección inestable y el siguiente objeto ya esté dentro de dicha zona, entonces detectaría los dos objetos como un solo. Fig. 1.29
Fig. 1.29
El retardo al desaccionamiento, que es el tiempo que transcurre desde que el objeto sale de la zona activa y el cambio de la señal de salida, este tiempo limita el intervalo entre dos móviles consecutivos. Fig. 1.30 Para evitar esta situación la distancia entre dos objetos consecutivos a detectar por el sensor debe ser como mínimo 1.5 veces el diámetro si es un sensor cilíndrico o 1.5 veces el lado si es de sección rectangular. Fig. 1.31 F) MONTAJES En esta parte de montaje de los sensores se analizan una serie de características, relacionadas con el entorno de trabajo, que se deben tener en cuenta, tanto en el diseño como en el montaje, como son: las interferencias mútuas, los metales circundantes, los ruidos electromagnéticos y las asociaciones eléctricas de sensores, que pueden hacer que su funcionamiento no sea el deseado.
Fig. 1.30
Fig. 1.31

Fig. 1.32
F.1) INTERFERENCIAS MÚTUAS Las interferencias mutuas se producen cuando dos o más sensores de proximidad se montan demasiado cerca, tanto enfrentados como paralelos. El efecto se puede traducir en una variación de la distancia de detección o en la introducción de transitorios indeseados. Para evitar este efecto debemos montar los sensores de proximidad respetando unas distancias mínimas entre ellos, a continuación se indican unas distancias aproximadas donde d es el diámetro del sensor si es cilíndrico o el lado si es rectangular.
Fig. 1.33
Fig. 1.34
Las distancias vienen determinadas por los fabricantes en los catálogos para cada sensor. Si las limitaciones de espacio impiden separar los sensores la distancia necesaria, se pueden alternar detectores con diferentes frecuencias de oscilación. F.2) METALES CIRCUNDANTES En las instalaciones de los sensores inductivos en superficies metálicas, es necesario guardar unas determinadas distancias con los metales próximos, para no alterar las características del sensor, estas distancias

nos las indica el fabricante, para sensores cilíndricos suelen ser:
Sensores enrasados Sensores no enrasados
Fig. 1.35 y para sensores rectangulares:
Montaje en escuadra Montaje en “U”
Fig. 1.36 F.3) RUIDOS ELECTROMAGNÉTICOS Los sensores de proximidad están protegidos de ruido normal, el que se produce entre los terminales o líneas de alimentación o salida, pero no están protegidos del ruido común, el que puede existir entre una de las líneas de alimentación o la salida y tierra, para reducir este ruido podemos:
- Mantener el cableado del sensor separado. - Apantallar los cables del sensor. - Instalar un supresor de ruidos en la fuente de ruidos.
Además los sensores inductivos, se ven afectados por los campos magnéticos creados por los cables conductores de corrientes elevadas situados en sus proximidades.
Fig. 1.37

Usando las siguientes fórmulas, según Rockwell, se puede determinar la distancia L requerida para evitar que este campo magnético les afecte.
Donde:
I es la corriente que circula por el hilo conductor (en kA). H es la intensidad del campo magnético (en kA /m): B es el flujo magnético (mT). L distancia obtenida (m).
En la Fig. 1.38 se muestra la gráfica de las distancias aproximadas de seguridad, en función de la corriente que circula por los conductores próximos. F.4) ASOCIACIONES ELÉCTRICA Normalmente las operaciones lógicas con sensores se realizan en el sistema de control, sin embargo es posible realizar conexiones serie ( AND) y paralelo (OR), para esto se deben tener en cuenta la influencia mutua de los sensores inductivos y los tiempos de respuesta y desconexión. • SENSORES DE CC Y CA DE 2 HILOS Los detectores de proximidad pueden acoplarse en serie o en paralelo , teniendo presentes las indicaciones propias para cada conexión. ASOCIACIÓN SERIE. Si están dos detectores a dos hilos en serie el cierre o conducción de uno de ellos provoca la aparición de la totalidad de la tensión de alimentación U en el que no conduce. Hay que asegurarse de que cualquiera de ellos soporta perfectamente dicha tensión.
Fig. 1.39 ASOCIACIÓN EN SERIE (A 2 HILOS)
Los sensores conectados en serie con la carga a activar, hace que aún cuando la salida está bloqueada, se deba tener en cuenta la corriente residual que circula por la carga para alimentar al sensor y una caída de tensión en el sensor cuando está en estado de conducción.
Fig. 1.38

Si un detector inductivo a 2 hilos está en serie con un contacto eléctrico normal S1, la apertura de éste le deja sin alimentación al detector. Como transcurre un cierto tiempo entre ser alimentado un detector y resultar operativo, puede aparecer algún problema por este "retraso a la disponibilidad". Si los sensores son idénticos, en estado de reposo la tensión de alimentación se reparte entre los sensores. Vdetector = V/ n La carga se deberá elegir, teniendo en cuenta que la tensión en ella, en estado de activación, será la tensión de alimentación menos la caída de tensión que se produce en cada sensor ( 0.7÷2.5 V). ASOCIACIÓN PARALELO. La corriente que circula por la carga es la suma de las corrientes residuales de los sensores conectados en paralelo, esto se debe tener en cuenta para evitar un funcionamiento defectuoso de los controles a los que se conecten. Una vez que se activa uno de los sensores impide indicar el estado de activación a los demás mientras no regrese al estado de reposo (el tiempo de retardo a la desconexión. Este tipo de conexión es aceptable en aplicaciones donde los sensores se activen y desactiven alternativamente unos tras otros. Debido al retraso a la la disponibilidad, puede no ser aconsejable el acoplamiento en paralelo de dos detectores de proximidad a dos hilos, o de uno y un contacto eléctrico normal . Cuando uno de ellos, o el contacto S2, se cierran, el detector que no conduce se queda sin tensión (Fig. 1.40 ).
Fig. 1.40 ASOCIACIÓN EN PARAELELO DE DETECTORES ( A 2 HILOS)
• SENSORES DE 3 HILOS ASOCIACIÓN SERIE.
Fig. 1.41

En estado de reposo del sensor, la fuente de alimentación debe proporcionar la corriente consumida por la carga y la corriente residual de cada sensor. En este caso tenemos una caída de tensión en cada detector que conduce. A causa de ello, puede ocurrir que si hay un cierto número de detectores en serie, todos conduciendo, le llegue al relé o contactor una tensión insuficiente para su activado ASOCIACIÓN PARALELO.
Fig. 1.42
Los sensores de corriente continua de tres hilos, pueden conectarse en paralelo sin mayores limitaciones, si las corrientes residuales de las señales de salida son lo suficientemente pequeñas en estado de reposo. LA CARGA Si la carga está constituida por una lámpara de incandescencia, la resistencia del filamento en frío puede ser del orden de una décima parte de su resistencia en caliente, lo que provoca una corriente muy importante en el momento de la conmutación, que puede sobrecargar el transistor de salida, para evitar esto se debe colocar una resistencia de precalentamiento del filamento. Los diodos LED no presentan problemas, colocándoles una resistencia en serie para adecuar la tensión a sus características. Otra consideración a tener en cuenta es la colocación de un diodo de libre circulación si la carga es de tipo inductivo y la circuitería del sensor no lo incluye. G) CLASES DE PROTECCION Las normas referentes a los tipos o grados de protección son: � Norma NEMA
TIPO 1 Propósito general. Envolvente destinada a prevenir de contactos accidentales con los aparatos. TIPO 2 Hermético a gotas. Previene contra contactos accidentales que pueden producirse por
condensación de gotas o salpicaduras. TIPO 3 Resistencia a la intemperie. Para instalación en el exterior. TIPO 3R Hermético a la lluvia. TIPO 4 Hermético al agua. Protege contra chorro de agua. TIPO 5 Hermético al polvo. TIPO 6 Sumergible en condiciones especificadas de presión y tiempo. TIPO 7 Para emplazamientos peligrosos Clase I. El circuito de ruptura de orriente actúa al aire. TIPO 8 Para emplazamientos peligrosos Clase I. Los aparatos están sumergidos en aceite. TIPO 9 Para emplazamientos peligroso Clase II y funcionamiento intermitente. TIPO 10 A prueba de explosión. TIPO 11 Resistente a ácidos o gases. TIPO 12 Protección contra polvo, hilos, fibras, hojas, rebose de aceite sobrante o refrigerante. TIPO 13 Protección contra polvo. Protege de contactos accidentales y de que su operación normal no se
interfiera por la entrada de polvo. � Norma DIN

La norma DIN 40 050 establece el grado de protección IP; éste se compone de dos dígitos:
- El primero indica la protección contra sólidos. - El segundo indica la protección contra el agua.
Fig. Tabla 1.43
H) COLOR Y NUMERACIÓN DE LOS HILOS La norma EN 50 044 determina los colores de los hilos del sensor, distingue entre sensores de proximidad polarizados y no polarizados, podemos diferenciar los siguientes casos: • Sensores de proximidad no polarizados tanto para CC o CA , con dos hilos de conexión, estos pueden ser
de cualquier color excepto verde/amarillo. • Sensores de proximidad polarizados para CC , con dos hilos de conexión, el terminal positivo debe ser
marrón y el terminal negativo, azul. • Sensores de proximidad de tres hilos, el terminal positivo debe ser marrón, el terminal negativo azul y la
salida debe ser negro. En la siguiente tabla se indican las abreviaciones de los colores usadas.
COLOR ABREVIACIÓN
black (negro) BK
brown (marrón) BN
red (rojo) RD
yellow (amarillo) YE
green (verde) GN
blue (azul) BU
grey (gris) GY
Cuerpos sólidos Agua
0 No está protegido contra el ingreso de cuerpos
extraños. 0 Sin protección.
1 Protegido contra ingreso de cuerpos extraños
de hasta 50 mm de diametro. 1 Protección contra el goteo de agua condensada.
2 Protegido contra ingreso de cuerpos extraños
de hasta 12 mm de diametro. 2 Protección contra el goteo hata 15° de la
vertical.
3 Protegido contra ingreso de cuerpos extraños
de hasta 2.5 mm de diametro. 3
Protección contra lluvia con ángulo inferior a 60°.
4 Protegido contra ingreso de cuerpos extraños
de hasta 1 mm de diametro. 4
Protección contra salpicaduras en cualquier dirección.
5 Protección contra depósito de polvo. 5 Protección contra el chorreo de agua en
cualquier dirección.
6 Protección contra ingreso de polvo. 6 Protección contra ambientes propios de las
cubiertas de los barcos.
7 Protección contra la inmersión temporal.
8 Protección contra la inmersión indefinida.

white (blanco) WH
gold (dorado) GD
green/yellow (verde/amarilo) GNYE
Fig. Tabla 1.44
En lo referente a la numeración de los terminales: • Sensores de proximidad no polarizados , los terminales 1 y 2 tienen la función de contacto normalmente
cerrado y los terminales 3 y 4 la de contacto normalmente cerrado. • Sensores de proximidad polarizados para corriente c ontinua con dos terminales , el terminal positivo debe
identificarse con el 1. El número 2 para el contacto normalmente cerrado y el 4 para el contacto normalmente abierto.
2 DETECTORES FOTOELÉCTRICOS Dentro de los detectores de proximidad citamos, por último, los fotoeléctricos. Cuando los objetos son de cualquier índole y las distancias relativamente grandes, recurrimos a los detectores fotoeléctricos o fotocélulas. Los detectores fotoeléctricos u ópticos tienen como función principal la detección de un objeto de cualquier naturaleza (opacos, transparentes, reflectantes, etc.) independiente de la distancia cuando el objeto penetra en el haz de luz luminoso. Son utilizados como detectores de posición. Fig. 2.1 A) COMPOSICIÓN Sus dos componentes básicos son: Fig. 2.2
� un emisor de luz. Normalmente es un emisor de diodo electroluminiscente
� un órgano receptor de luz fotosensible o fotocélula propiamente dicha. Normalmente suele ser un receptor de fototransistor.
Dependiendo del modelo de detector, la emisión se realiza en infrarrojo o en luz visible verde o roja. La corriente que atraviesa el LED (diodo luminiscente) emisor se modula para obtener una emisión luminosa pulsante e insensibilizar los sistemas a la luz ambiental. B) PRINCIPIO DE FUNCIONAMIENTO Está basado en la generación de un haz de luz luminoso por parte de un fotoemisor (emisor), que se proyecta bien sobre un fotorreceptor, o bien sobre un dispositivo reflectante. La interrupción o reflexión del haz por parte del objeto a detectar provoca el cambio de estado de la salida de la fotocélula (receptor). Fig. 2.3
Fig. 2.3
Fig. 2.1
Fig. 2.2

C) PROCEDIMIENTOS DE DETECCIÓN Los detectores fotoeléctricos emplean dos procedimientos para detectar objetos: – bloqueo del haz por el objeto detectado. – retorno del haz sobre el receptor por el objeto detectado. Bloqueo del haz En ausencia de un objeto, el haz luminoso alcanza el receptor. Un objeto bloquea el haz al penetrar en él: no hay luz en el receptor = detección
Fig. 2.4
Tres sistemas básicos emplean este procedimiento, que se basa en las propiedades absorbentes de los objetos:
– barrera, – réflex, – réflex polarizado.
Retorno del haz En ausencia de un objeto, el haz no llega al receptor. Cuando un objeto penetra en el haz, lo envía al receptor: luz en el receptor = detección
Fig. 2.5
Dos sistemas básicos emplean este procedimiento, que se basa en las propiedades reflectantes de los objetos:
– proximidad, – proximidad con borrado del plano posterior.
D) SISTEMAS BÁSICOS UTILIZADOS Se puede elegir entre tres sistemas.
SISTEMA DE BARRERA
SISTEMAS DE REFLEXIÓN (reflex) - Sistema reflex

- Sistema reflex polarizado
SISTEMAS DE PROXIMIDAD - Sistema de proximidad - Sistema de proximidad con borrado del plano posterior
• SISTEMA DE BARRERA
Fig. 2.6
Este sistema de detección permite detectar cualquier objeto que interrumpa el haz luminoso. (Fig. 2.7)
Fig. 2.7
El emisor y el receptor se sitúan en dos cajas separadas. Si un objeto opaco cualquiera se interpone en dicho rayo luminoso, el receptor detecta la ausencia de luz y se activa. El haz se emite en infrarrojo o láser. En el sistema de barrera, el emisor de luz se alimenta, en general, a igual tensión que el receptor. Fig. 2.8 .
- Si se trata de corriente continua, los rangos usuales son de 12-24 V o 24-48 V. - En alterna es de 24 -230 V
En los otros sistemas, hay una única tensión de alimentación.
Fig. 2.8 EMISOR DE LUZ
A excepción de los objetos transparentes, que no bloquean el haz luminoso, puede detectar todo tipo de objetos (opacos, reflectantes...) gracias a la excelente precisión que proporciona la forma cilíndrica de la zona útil del haz. Si emisor y receptor están separados por una distancia, sus ejes ópticos deberán coincidir.

Bajo los elementos vemos algunos de los símbolos para representarlos (Fig. 2.9)
Fig. 2.9 DETECTOR FOTOEELÉCTRICO SISTEMA BARRERA
Es el sistema que permite los mayores alcances, hasta 100 m con ciertos modelos y se utliza también en la detección de objetos cuyo poder reflexivo prohíbe la utilización de un sistema reflex. Los detectores de proximidad fotoeléctricos de sistema de barrera aportan numerosas ventajas y algunas desventajas :
Fig. 2.10 VENTAJAS Y DESVENTAJAS DE UN SISTEMA DE TECTOR DE SISTEMA DE BARRERA
• SISTEMAS DE REFLEXIÓN (REFLEX) Sistema Reflex Cuando hay problemas de espacio se recurre al sistema de reflexión (reflex) . Emisor y receptor están incorporados en la misma caja. La detección se consigue por la interrupción del haz reflejado. En ausencia de un objeto, un reflector devuelve al receptor el haz infrarrojo que emite el emisor. (Fig. 2.11 y 2.12) .
Fig. 2.11
El reflector consta de una elevada cantidad de triedros trirrectángulos de reflexión total cuya propiedad consiste en devolver todo rayo luminoso incidente en la misma dirección. La detección se realiza cuando el objeto detectado bloquea el haz entre el emisor y el reflector. Por tanto, este sistema no permite la detección de objetos reflectantes que podrían reenviar una cantidad más o menos importante de luz al receptor.

El alcance nominal de un detector fotoeléctrico réflex es del orden de dos a tres veces inferior al de un sistema de barrera (alcances cortos o medianos). Un detector fotoeléctrico réflex puede utilizarse en un entorno contaminado.
Fig. 2.12 DETECTOR FOTOELÉCTRICO SISTEMA REFLEX
Los detectores de proximidad fotoeléctricos de sistema reflex aportan numerosas ventajas y algunas desventajas :
Fig. 2.13 VENTAJAS Y DESVENTAJAS DE UN SISTEMA DE TECTOR DE SISTEMA REFLEX
Sistema réflex polarizado Los objetos brillantes, que en lugar de bloquear el haz reflejan parte de la luz hacia el receptor, no pueden detectarse con un sistema réflex estándar. En estos casos, es preciso utilizar un sistema réflex polarizado. Este tipo de detector emite una luz roja visible y está equipado con dos filtros polarizadores opuestos:
– un filtro sobre el emisor que impide el paso de los rayos emitidos en un plano vertical, – un filtro sobre el receptor que sólo permite el paso de los rayos recibidos en un plano horizontal.
En ausencia de un objeto
El reflector devuelve el haz emitido, polarizado verticalmente, después de haberlo despolarizado. El filtro receptor deja pasar la luz reflejada en el plano horizonal. Fig. 2.14
Fig. 2.14

En presencia de un objeto
El objeto detectado devuelve el haz emitido sin ninguna modificación. El haz reflejado, polarizado verticalmente, queda por tanto bloqueado por el filtro horizontal del receptor.
La elección del reflector, el funcionamiento en la zona próxima y el uso en entornos contaminados siguen los criterios del sistema réflex estándar.
El funcionamiento de un detector réflex polarizado puede verse perturbado por la presencia de ciertos materiales plásticos en el haz, que despolarizan la luz que los atraviesa. Por otra parte, se recomienda evitar la exposición directa de los elementos ópticos a las fuentes de luz ambiental. Fig. 2.15
Fig. 2.15
• SISTEMAS DE PROXIMIDAD Sistema de proximidad Al igual que en el caso de los sistemas réflex, el emisor y el receptor están ubicados en una misma caja. En este caso la reflexión del haz luminoso se produce en la misma superficie del objeto detectado. El objeto a detectar tiene que ser suficientemente reflectante. Ver Fig. 2.16 y 2.17 Su efecto de activado es opuesto al de los sistemas anteriores, ya que se invierte el efecto ausencia/presencia d objeto.
- Si hay objeto, la fotocélula recibe luz - Si no hay objeto, no recibe luz
Un reglaje de sensibilidad permite limitar la influencia eventual del entorno situado detrás del objeto a detectar. Estos modelos se suelen utilizar para alcances cortos.
Fig. 2.16

Fig. 2.17 DETECTOR FOTOELÉCTRICO SISTEMA PROXIMID AD
Sistema de proximidad con borrado del plano posteri or Los detectores de proximidad con borrado del plano posterior están equipados con un potenciómetro de regulación de alcance que permite “enfocar” una zona de detección y evitar la detección del plano posterior. Pueden detectar a la misma distancia objetos de colores y reflexividades distintas. En la Fig. 2.18 , la parte delimitada por un trazo negro se ha definido con una pantalla de 20 x 20 cm blanca 90%; la delimitada por un trazo azul, con una pantalla negra 6% (el color de prueba menos reflectante).
Fig. 2.18
La tolerancia de funcionamiento de un sistema de proximidad con borrado del plano posterior en un entorno contaminado es superior a la de un sistema estándar. Esto es debido a que el alcance real no varía en función de la cantidad de luz devuelta por el objeto detectado.
Fig. 2.19 Fig. 2.20
E) MODOS DE FUNCIONAMIENTO Los detectores fotoeléctricos pueden funcionar en dos modos: Fig. 2.21
- Conmutación clara (función “luz ”) - Conmutación oscura (función “sombra ”)

Fig. 2.21
Dependiendo del modelo de detector, el funcionamiento en conmutación clara u oscura es predefinido o programable por el usuario. La programación se lleva a cabo por cableado. Conmutación clara (función “luz ”) La salida se activa cuando el haz de luz alcanza el receptor (ausencia de objeto en detectores de barrera y réflex, presencia de objeto en detectores de proximidad). Conmutación oscura (función “sombra ”) La salida se activa cuando el haz de luz no alcanza el receptor (presencia de objeto en detectores de barrera y réflex, ausencia de objeto en detectores de proximidad).
Fig. 2.22

Fig. 2.23
F) CONEXIONES. EJEMPLOS DE FUNCIONAMIENTO CONEXIÓN A DOS HILOS Los receptores a 2 hilos de cualquiera de los tres sistemas pueden ser alimentados a tensión alterna (24 -240 V) o a tensión continua / alterna, indistintamente. Existen las variantes de receptor NC y NA que constan en la Fig. 2.24 .
Fig. 2.24
Un detector NO(NA) conducirá cuando exista un objeto C interponiéndose en el haz (conmutación «sombra»), y un detector NC, al contrario («luz»). Los símbolos anteriores representan al receptor (esté o no en la misma caja que el emisor) en su versión más elemental de dos hilos. Este tipo de detector tiene uso casi exclusivo para tensión de mando en corriente alterna, a los valores habituales de ésta. El detector a 2 hilos se coloca, simplemente, en serie con el relé o contador a activar Fig. 2.25 . Respecto a su conexión en serie de detectores a 2 hilos, o de uno de ellos con un contacto mecánico (pulsador, final de carrera), existe el problema del retardo a la disponibilidad, que ya conocemos.

Fig. 2.25
De modo análogo a uno inductivo: según exista o no un objeto interponiéndose en el rayo que llega al receptor, su estado cambia de conductor a no conductor, o viceversa. Es decir, se activa. Aquí no podemos hablar (como en un fin de carrera) de un contacto eléctrico que abre o cierra, porque la conmutación se realiza por medio de semiconductores, pero el efecto final es el mismo. El esquema de la Fig. 2.26 corresponde al mando de un motor trifásico. Cuando el elemento móvil que acciona el motor (cinta, husillo...) atraviesa el haz del detector fotoeléctrico B, se producirá el paro.
Fig. 2.26
CONEXIÓN A TRES HILOS El empleo de detectores en c/c tiene algunas ventajas respecto a los anteriores (interferencias, parásitos ...). La Fig. 2.27 ofrece cuatro variantes para barrera y reflexión. Para proximidad, los contactos NC y NA están invertidos
Fig. 2.27

El esquema de la Fig. 2.28 corresponde al mando de un motor trifásico. Cuando el elemento móvil que acciona el motor (cinta, husillo...) atraviesa el haz del detector fotoeléctrico B, se producirá el paro.
Fig. 2.28
CONEXIÓN A CINCO HILOS Para el diseño a cinco hilos : - dos para la alimentación - tres para salida de un contacto NANC En el detector a cinco hilos, existe un pequeño relé interno con un contacto NANC. Este contacto reemplaza al NC y NA, con la ventaja de poder conmutar tensiones independientes del aparato. Fig. 2.29
Fig. 2.29
Se alimenta indistintamente en continua o en alterna, en un amplio rango de tensión (24-240 V ≅ ) G) ASOCIACIONES ELÉCTRICAS
Los detectores fotoeléctricos pueden conectarse en: (Fig. 2.30)
• serie (dos o tres hilos) • paralelo (tres hilos)
Fig. 2.30

El conexionado de detectores de la figura anterior (Fig. 2.30 ) puede ser problemático para más de dos, según las tensiones de mando existentes. No existe ningún problema de este tipo si se emplean detectores con salida a relé o aparatos ya destinados para ello. En la Fig. 2.31 tenemos este último caso con tres detectores en serie y otros tres en paralelo. En el primer caso el activado simultáneo de todos ellos activa el contacto NO.NC. En el segundo caso basta el de uno cualquiera de ellos. A la derecha, el símbolo a emplear en los esquemas.
Fig. 2.31
Ejemplo: En la Fig. 2.32 se han aplicado dos detectores fotoeléctricos con salida a relé NO.NC, para regular el nivel de un depósito. A este depósito llega líquido constantemente y su vaciado lo realiza una bomba accionada por un motor trifásico. Observando el esquema deducimos :
- Abriendo S2 quedan los detectores B1 y B2 sin tensión de alimentación y sus relés desactivados. La bomba estará controlada por SI.
- Cuando los detectores acusan «luz» sus relés están activados. Dada la forma en la que está realizado el circuito de mando, el nivel siempre oscilará entre el máximo y el mínimo.
Fig. 2.32

3 REPETICIÓN DEL MOVIMIENTO DE UN MÓVIL A) SELECTORES DE POSICIÓN Son órganos repetidores del movimiento de una máquina de la que ellos controlan el desplazamiento mediante contactores de mando de su motor. Fig. 3.1 Acoplados al motor mediante una cadena y piñones reductores, están equipados de un cierto número de contactos auxiliares que se abren o cierran cuando la máquina ocupa ciertas posiciones a lo largo de su desplazamiento: disminución de velocidad antes de la parada, parada en un lugar fijado, señalización, fin de carrera para equipos de ascensores, de elevación o de manutención. B) INTERRUPTORES DE CONTROL DE NIVEL Complemento indispensable de los grupos electro-bombas, los interruptores de flotador provocan el arranque y la parada en función del nivel en el depósito. Fig. 3.2 Su realización es tal que controlan indiferentemente el punto alto (bomba de alimentación) o el punto bajo (bomba de vaciado).
Fig. 3.1 SELECTOR DE POSICIÓN Fig. 3.2 INTERRUPTOR DE CONTROL DE NIVEL
Pueden ser utilizados en señalización de nivel u otras aplicaciones similares. Acoplados a un flotador que controla el nivel en un depósito, son igualmente empleados para poner en marcha o parar sucesivamente y automáticamente un cierto número de grupos electrobombas en función del caudal pedido. La elección del modelo depende de las características del depósito, de la naturaleza y temperatura del líquido y del ambiente donde funciona el aparato. 4 CONTROL DE PRESIÓN. PRESOSTATOS Y VACUOSTATOS. PRESOSTATOS Y VACUOSTATOS Estos aparatos están destinados a la regulación o al control de una presión o de una depresión en los circuitos neumáticos o hidráulicos. Cuando la presión o la depresión alcanzan el valor de reglaje, el contacto de apertura-cierre de ruptura brusca báscula; cuando el valor de la presión o de la depresión disminuye el (o los) contactos toman su posición original. Se utilizan frecuentemente para:
� mandar la puesta en marcha de grupos compresores en función de la presión en el depósito;
� asegurarse de la circulación de un fluido de lubrificación o de refrigeración;
� limitar la presión en determinadas máquinas-herramienta provistas de cilindros hidráulicos.
Fig. 4.1
PRESOSTATO Fig. 4.2 SÍMBOLO DE
PRESOSTATO

Los principales criterios de elección son los siguientes:
� tipo de funcionamiento: - vigilancia de un umbral; - regulación entre dos umbrales;
� naturaleza de los fluidos (aceite hidráulico, agua dulce, agua de mar, aire);
� valor de la presión a controlar;
� entorno;
� naturaleza del circuito eléctrico: - circuito de mando (caso más corriente); - circuito de potencia (presostato de potencia). Los presostatos pueden ser:
� De máxima , si actúan por de presión. � De mínima , si actúan por defecto de presión. � De máxima y mínima , si actúan tanto por exceso como por defecto de presión.
Según su constitución se pueden clasificar en: - Presostatos de membrana: Las variaciones de presión se transmiten a la membrana, la cual desplaza los contactos eléctricos.
Fig. 4.3
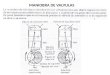
- Presostatos de sistema tubular. Actúa mediante un tubo ondulado sobre el contacto eléctrico del presostato, el cual abre o cierra circuitos según baje o suba la presión en la tubería. Son muchos los presostatos que existen en el mercado, tanto por sus sistemas, límites, construcción, etc. APLICACIONES 1.- Regulación de la presión del calderín de un com presor. Tengamos un equipo compresor formado por una bomba (B ), movida por un motor (M), que manda aire al calderín para una pistola de pintor. El funcionamiento del equipo será: Cuando el depósito o calderín esté vacío (equipo fuera de servicio), se cierra el interruptor (I) y el motor (M) se pone en marcha, moviendo la bomba (B) que hace entrar el aire por el conducto de entrada (ENT). La válvula de salida (SAL) está cerrada y el aire va llenando el depósito hasta que llega a una cierta presión (P), en cuyo momento el aire empuja el émbolo (E) del presostato, venciendo el esfuerzo mecánico del muelle (m) en sentido contrario. En ese momento, el émbolo (E), mediante el vástago (v), abre el contacto (c) y el motor se parará, por no tener suministro de energía eléctrica. Al abrir la válvula de salida (SAL) al empezar a pintar, la presión del calderín disminuye por debajo de su valor previsto (P) y el muelle (m) es más fuerte que la presión sobre el ém-bolo (E), con lo cual éste retrocede. El contacto (c) se cierra y el motor (M) se pone en marcha moviendo la bomba ( B ) hasta alcanzar de nuevo la presión (P) en que se pararía de nuevo, repitiéndose el ciclo tantas veces como
Fig. 4.4

fuese preciso, mientras no se abra el interruptor (I). La presión límite se fijará regulando la presión mecánica del muelle (m). Este es un tipo muy sencillo y de principio, pero servirá para comprender el principio de funcionamiento de un presostato y una de sus múltiples aplicaciones.
Fig. 4.5
2.- Control automático de un motor eléctrico. Dicho motor bombea al agua extraída de un pozo y la suministra a una vivienda.
Circuito de maniobra Circuito de potencia
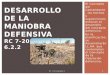
Fig. 4.6 5 CONTROL DE LA TEMPERATURA. DETECTORES DE TEMPERATURA O TERMOSTATOS Son dispositivos que permiten medir la temperatura de un recinto, depósito, etc., o detectar si ésta excede un cierto valor, denominado umbral. Generalmente, se utilizan en sistemas de control que permiten realizar una regulación de dicha temperatura. El contacto eléctrico del termostato cambia de estado cuando la temperatura alcanza el punto de consigna reglado.

Los termostatos se emplean frecuentemente para controlar:
� la temperatura en prensas, compresores, grupos de climatización, instalación de calefacción, etc. � la refrigeración en circuitos de aceite, máquinas-herramienta, máquinas de fundición, etc.
Los principales criterios de elección son semejantes a los de los presostatos; - tipo de funcionamiento, fluido, - temperatura a controlar, - entorno. Principio de funcionamiento Puede ser: a) De láminas bimetálicas Se basa en la deformación que experimentan dos metales ( bimetal ) de diferentes coeficientes de dilatación. Al calentarse se curva una placa formada este bimetal y actúa sobre un contacto. b) De tubo capilar Basado en las variaciones de presión de un fluido en un tubo delgado, al variar la temperatura. El aumento o disminución de presión hace actuar o no el contacto eléctrico.
Fig. 5.1 TERMOSTATOS