Embed Size (px)
Citation preview
ÁÁ12⎡ ⎤m
FACTORES CUADRÁTICOS FACTORES CUADRÁTICOS 121 2 ( / ) ( / )n nj jζ ω ω ω ω⎡ ⎤+ +⎣ ⎦m
2
1( )G jωω ω
=⎛ ⎞ ⎛ ⎞
1 2n n
j jω ωζω ω
⎛ ⎞ ⎛ ⎞+ +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Si ζ > 1 : Factor cuadrático se expresa como un producto de dos factores deprimer orden con polos reales.
Si 0 < ζ < 1 : Factor cuadrático es el producto de dos factores complejosconjugados.conjugados.
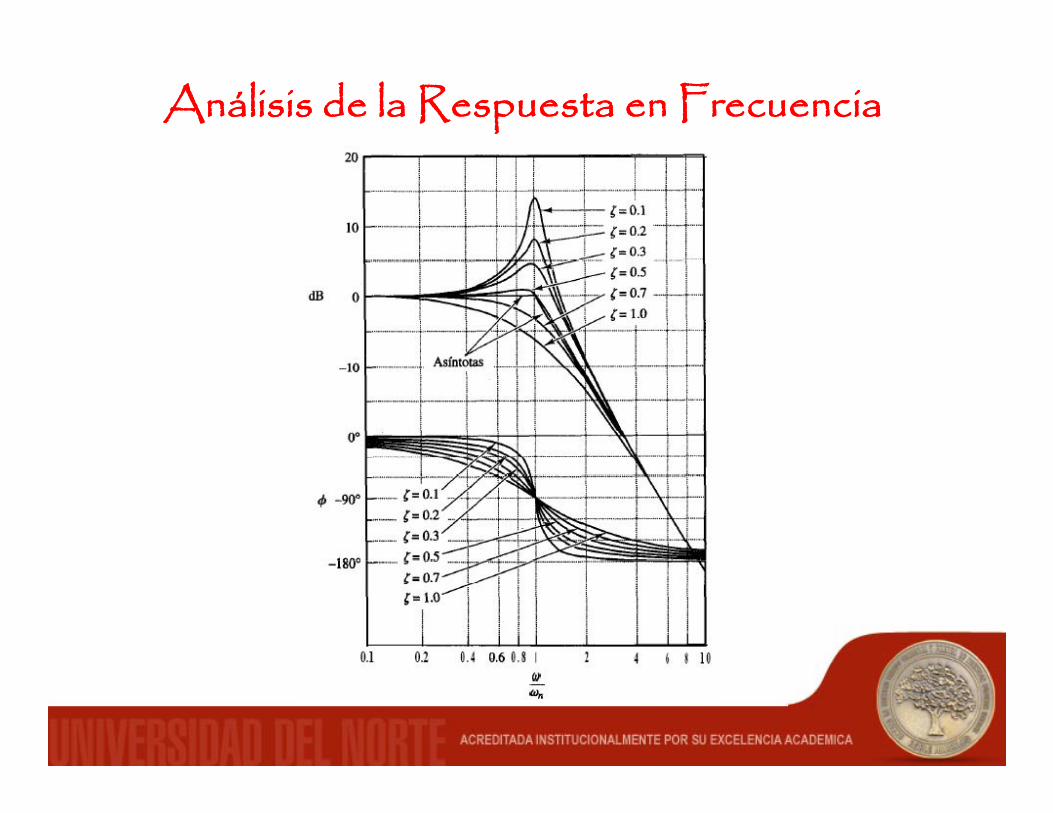
La magnitud y la fase del factor cuadrático dependen de la frecuenciaesquina y del factor de amortiguamiento ζ .
2 22
2 2
120log 20log 1 2
1 2 n nj j
ω ωζω ωω ωζ
⎛ ⎞ ⎛ ⎞= − − +⎜ ⎟ ⎜ ⎟
⎛ ⎞ ⎛ ⎞ ⎝ ⎠ ⎝ ⎠+ +⎜ ⎟ ⎜ ⎟1 2
n n
j jζω ω
+ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
b f l d í d bPara bajas frecuencias ω << ωn → ‐20log 1 = 0 dB. La asíntota de bajafrecuencia es una recta horizontal en 0dB.
Para altas frecuencias ω >> ω → la asíntota de alta frecuencia es una rectaPara altas frecuencias ω >> ωn → la asíntota de alta frecuencia es una rectacon pendiente de ‐40dB/década.
1040log 40 40logω ωω ω
− = − −nω ω
La asíntota de alta frecuencia corta a la de baja frecuencia en ω = ωn ya que
40log 40log1 0n dBω40log 40log1 0n
n
dBω
− = − =
Las asíntotas son independientes del factor ζ.
Cerca de la frecuencia ω = ωn hay un pico de resonancia. El factor deamortiguamiento relativo ζ determina la magnitud de este pico deresonancia.
3
El ángulo de fase del factor cuadrático es:
⎛ ⎞⎜ ⎟ω
12 2
21 tan
1 2 1
−
⎜ ⎟⎜ ⎟= = − ⎜ ⎟⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟+ + −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
n
n n n
j j
ωζωφ
ω ω ωζω ω ω
En 0 0ºω φ= → =2ζ⎛ ⎞
⎝ ⎠
90º180º
nω ω φω φ= → = −= ∞ → = −
1 12tan tan 90º0ζφ − −⎛ ⎞= = − ∞ = −⎜ ⎟
⎝ ⎠
La curva del ángulo de fase tiene pendiente simétrica respecto del punto de reflexión (φ = ‐90º).
Las curvas de respuesta en frecuencia para el factorpueden obtenerse invirtiendo el signo de la magnitud
2
1 2n n
j jω ωζω ω
⎛ ⎞ ⎛ ⎞+ +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠p g glogarítmica y el del ángulo de fase de:
21
ω ω⎛ ⎞ ⎛ ⎞1 2
n n
j jω ωζω ω
⎛ ⎞ ⎛ ⎞+ +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
PROCEDIMIENTO GENERAL PARA DIBUJAR DIAGRAMAS DE BODE
Reescribir la función de transferencia sinusoidal G(jω)H(jω) como unReescribir la función de transferencia sinusoidal G(jω)H(jω) como unproducto de los factores básicos.
Identificar las frecuencias esquinas asociadas con estos factores básicos.Identificar las frecuencias esquinas asociadas con estos factores básicos.
Dibujar las curvas asintóticas de magnitud logarítmica con pendientesadecuadas entre las frecuencias esquinas.q
La curva exacta, que se encuentra cerca de la curva asintótica, se obtieneañadiendo las correcciones adecuadas.
La curva del ángulo de fase de G(jω)H(jω) se dibuja añadiendo las curvasde ángulo de fase de los factores individuales.
Ejemplo:Ejemplo:
( ) ( )( )( ) ( )2
10 3
2 2
jG j
j j j j
ωω
ω ω ω ω
+=
⎡ ⎤+ + +⎣ ⎦
Esta función se compone de lossiguientes factores:
( ) 17.5, , 1 ,3
j jωω − +
reescribiendo
ω⎛ ⎞
( )
( )121
3
1 , 12 2 2
jj j
ωω ω−
− ⎡ ⎤⎛ ⎞+ + +⎢ ⎥⎜ ⎟⎝ ⎠ ⎢ ⎥⎣ ⎦
( )( ) ( )2
7.5 13
1 12 2 2
jG j
jj jj
ω
ωωω ωω
⎛ ⎞+⎜ ⎟⎝ ⎠=⎡ ⎤⎛ ⎞+ + +⎢ ⎥⎜ ⎟
⎝ ⎠ ⎢ ⎥⎣ ⎦
⎣ ⎦
Las frecuencias esquina del tercero,cuarto y quinto término son ω = 3,
2 √2 ti t2 2 2⎝ ⎠ ⎢ ⎥⎣ ⎦ ω = 2 y ω = √2 respectivamente.
Se dibujan las curvas asintóticas separadas para cada uno de los factores.
Se obtiene la curva compuesta añadiendo algebraicamente las curvasindividuales.
Cuando se añaden las curvas asintóticas individualesindividuales aa cadacadaCuando se añaden las curvas asintóticas individualesindividuales aa cadacadafrecuencia,frecuencia, lala pendientependiente de la curva compuesta es acumulativa.
Debajo de ω = √2, la gráfica tiene una pendiente de ‐20dB/década
En la primera frecuencia esquina ω = √2 la pendiente cambia a ‐60dB/década y continúa a la siguiente frecuencia esquina ω = 2, donde lapendiente se convierte en ‐80 dB/década. En la última frecuencia esquinap qω = 3, la pendiente cambia a ‐60 dB/década.
Para los factores de primer orden, las correcciones son ± 3dB en laPara los factores de primer orden, las correcciones son ± 3dB en lafrecuencia esquina y ± 1dB en las frecuencias una octava por debajo y porencima de la frecuencia esquina.
Cualquier cambio en la pendiente de la curva de magnitud sólo se hace enlas frecuencias esquina de la función de transferencia G(jω).
En lugar de dibujar y añadir curvas de magnitud individuales, es posibledibujar la curva sin trazar las curvas individuales. Se comienza pordibujar la parte de la recta de frecuencia más baja (la recta condibujar la parte de la recta de frecuencia más baja (la recta conpendiente de ‐20 dB/década para ω < √2 ).
A medida que la frecuencia aumenta, se obtiene el efecto de los polosA medida que la frecuencia aumenta, se obtiene el efecto de los poloscomplejos conjugados (término cuadrático) en la frecuencia esquina ω< √2 . Los polos complejos conjugados provocan que las pendientes dela curva de magnitud cambien de ‐20 a ‐60 dB/década.g
En la frecuencia esquina, ω = 2 , el efecto del polo es cambiar lapendiente a ‐80dB/década.
En la frecuencia esquina, ω = 3, el efecto del cero es cambiar lapendiente de ‐80 a ‐60 dB/década.
SISTEMAS DE FASE MÍNIMA Y DE FASE NOMÍNIMASISTEMAS DE FASE MÍNIMA Y DE FASE NOMÍNIMASISTEMAS DE FASE MÍNIMA Y DE FASE NO MÍNIMASISTEMAS DE FASE MÍNIMA Y DE FASE NO MÍNIMA
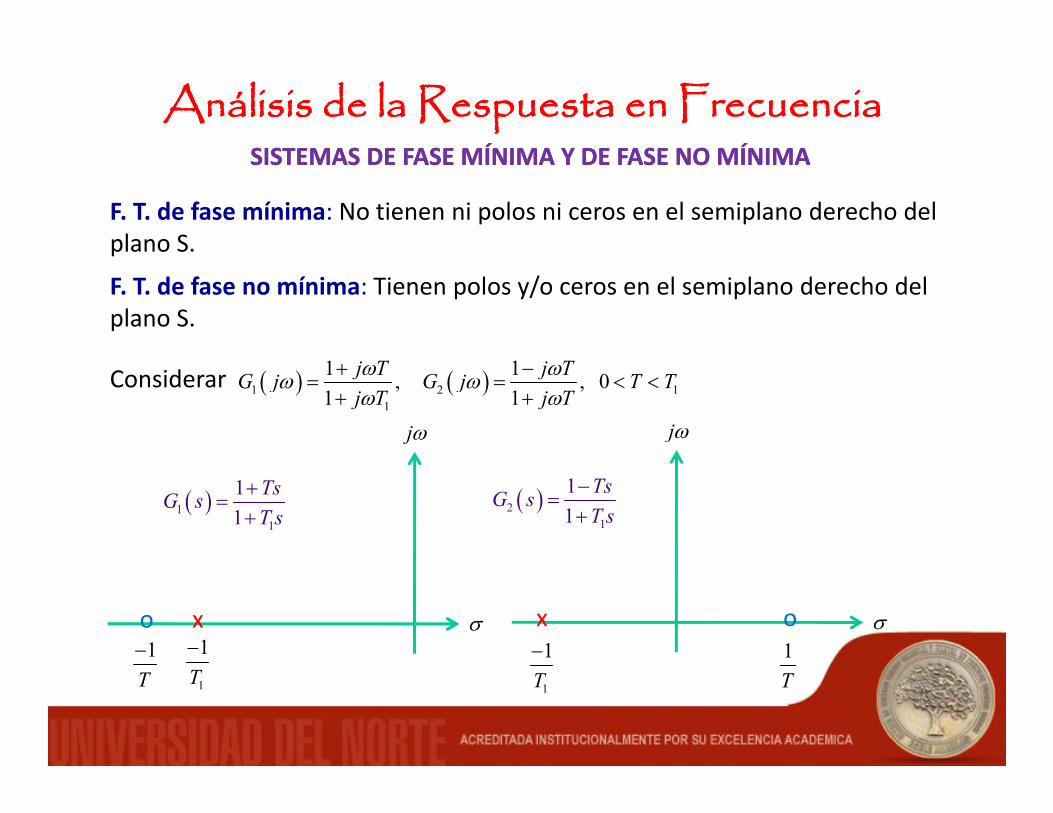
F. T. de fase mínima: No tienen ni polos ni ceros en el semiplano derecho del plano S.p
F. T. de fase no mínima: Tienen polos y/o ceros en el semiplano derecho del plano S.
Considerar ( ) ( )1 2 11
1 1, , 01 1j T j TG j G j T Tj T j Tω ωω ωω ω
+ −= = < <
+ +
jω jω
( )11
11TsG sT s
+=
+( )2
1
11TsG sT s
−=
+
xo σ1− 1−
x o σ1− 1
T 1T 1T T
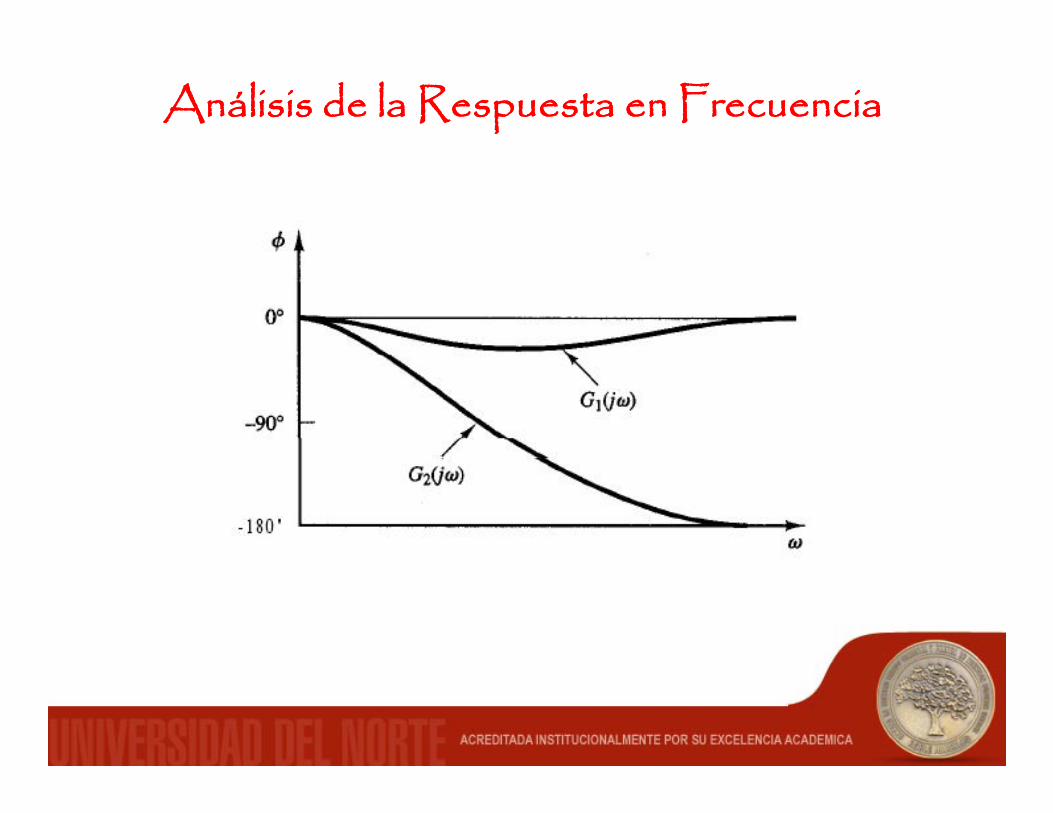
G1(s) y G2(s) tienen la misma característica de magnitud, pero diferentescaracterísticas de ángulo de fase.
L i t difi l d l t l f tLos sistemas difieren el uno del otro en el factor:
1( )1j TG jj Tωωω
−=
+
Su magnitud siempre es unitaria.
Su ángulo de fase es y varía de 0 a ‐180°12 tan Tω−−1 j Tω+ g ycuando ω varía de 0 a ∞.
Para un sistema de fase mínima, las características de magnitud y dePara un sistema de fase mínima, las características de magnitud y deángulo se relacionan de forma única.
Si se especifica la curva de magnitud de un sistema en el rango dep g gfrecuencia completo de 0 a∞, la curva de ángulo de fase se determina deforma única. Sin embargo, esto no es válido para un sistema de fase nomínima.
Para un sistema de fase mínima:
El ángulo de fase en ω = ∞ se convierte en ‐90(q‐p), donde p y q son losd d l li i d l d l d i d d l f iógrados de los polinomios del numerador y el denominador de la función
de transferencia.
Para un sistema de fase no mínima:
El ángulo de fase en ω = ∞ difiere de ‐90(q – p). En cualquier sistema, lapendiente de la curva de magnitud logarítmica en ω =∞ es igual a ‐20(q – p)pendiente de la curva de magnitud logarítmica en ω es igual a 20(q p)dB/década.
Es posible detectar si el sistema es de fase mínima, si se examinan tanto lappendiente de la asíntota de alta frecuencia de la curva de magnitudlogarítmica, como el ángulo de fase en ω =∞.
Si la pendiente de la curva de magnitud logarítmica a medida que ω tiene ainfinito, es ‐20(q – p) dB/década y el ángulo de fase en ω = ∞ es igual a ‐90(q ‐ p), el sistema es de fase mínima.90(q p), el sistema es de fase mínima.
Los sistemas de fase no mínima son lentos en su respuesta debido a sucomportamiento defectuoso al inicio de la respuesta.
En la mayor parte de los sistemas de control, debe tenerse cuidado paraevitar un retardo de fase excesivo.
Al diseñar un sistema, si una velocidad de respuesta rápida es de vitalimportancia, no deben usarse componentes de fase no mínima.
Un ejemplo típico de elementos de fase no mínima que pueden estarpresentes en un sistema de control es el retardo de transporte o eltiempo muerto.
RETARDO DE TRANSPORTE
El retardo de transporte tiene un comportamiento de fase no mínima yEl retardo de transporte tiene un comportamiento de fase no mínima ytiene un retardo de fase excesivo sin atenuación en altas frecuencias.
Considere el retardo de transporte obtenido mediante:Considere el retardo de transporte obtenido mediante:
( )( ) cos sin 1 0
−=
= − = →
j TG j eG j T j T dB
ωωω ω ω( )( ) 57.3 ( )∠ = − = −
j jG j T rad T gradosω ω ω
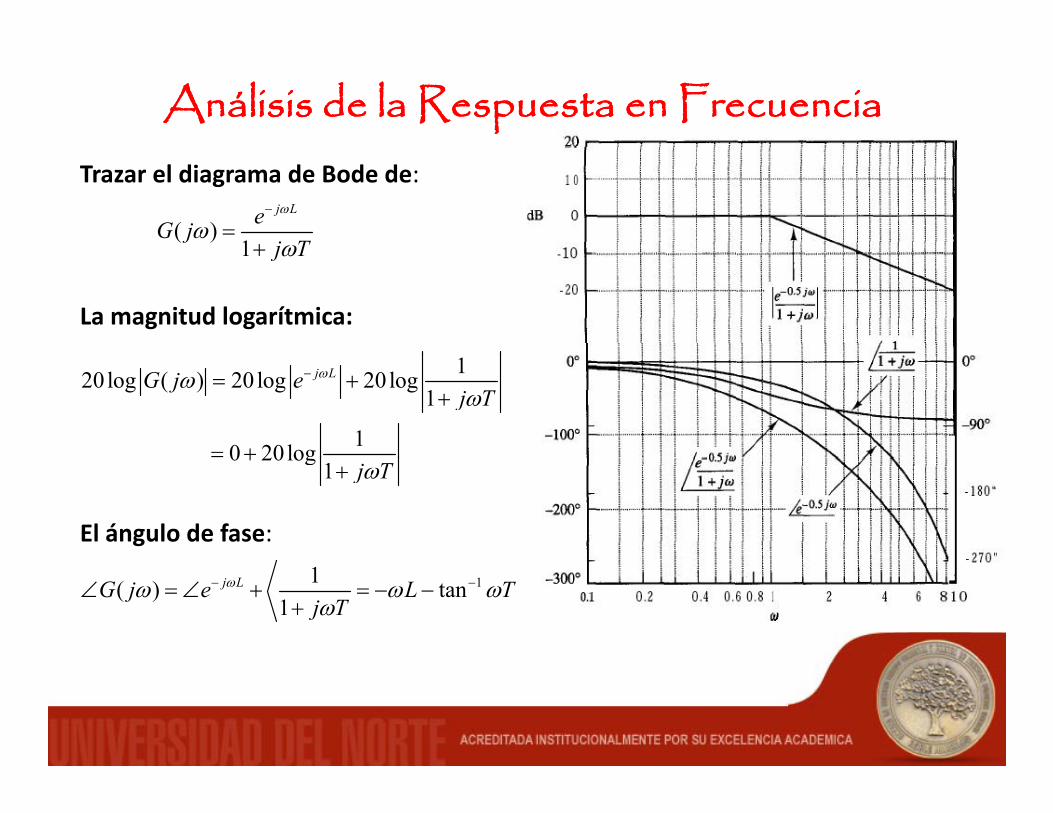
Trazar el diagrama de Bode de:
( )1
j LeG jj T
ω
ωω
−
=+1 j Tω+
La magnitud logarítmica:
120log ( ) 20 log 20log1
10 20log
j LG j ej T
ωωω
−= ++
= +0 20log1 j Tω
++
El ángulo de fase:
11( ) tan1
j LG j e L Tj T
ωω ω ωω
− −∠ = ∠ + = − −+
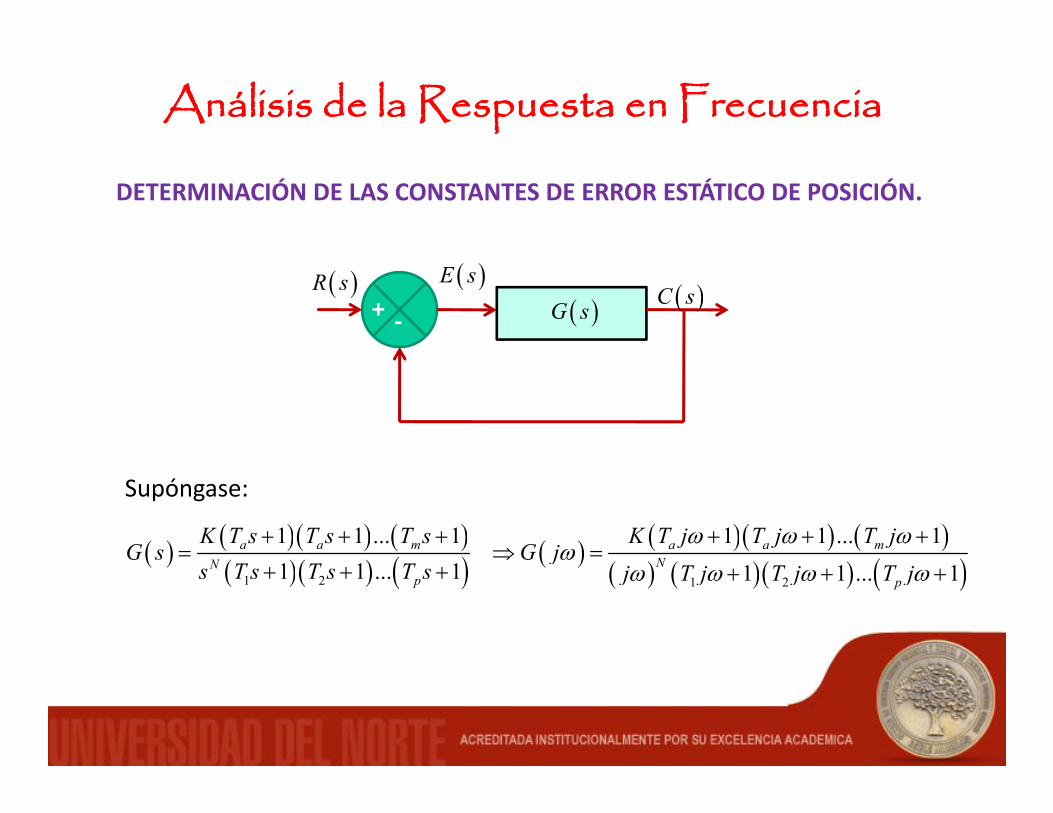
DETERMINACIÓN DE LAS CONSTANTES DE ERROR ESTÁTICO DE POSICIÓN.
+ ‐( )R s ( )E s
( )C s( )G s
Supóngase:
( ) ( )( ) ( )( )( ) ( )
1 1 ... 1a a mN
K T s T s T sG s
+ + += ( ) ( )( ) ( )
( )1 1 ... 1a a m
N
K T j T j T jG j
ω ω ωω
+ + +⇒ =( )
( )( ) ( )1 21 1 ... 1Nps T s T s T s+ + +
( )( ) ( )( ) ( )1 21 1 ... 1N
p
jj T j T j T jω ω ω ω+ + +
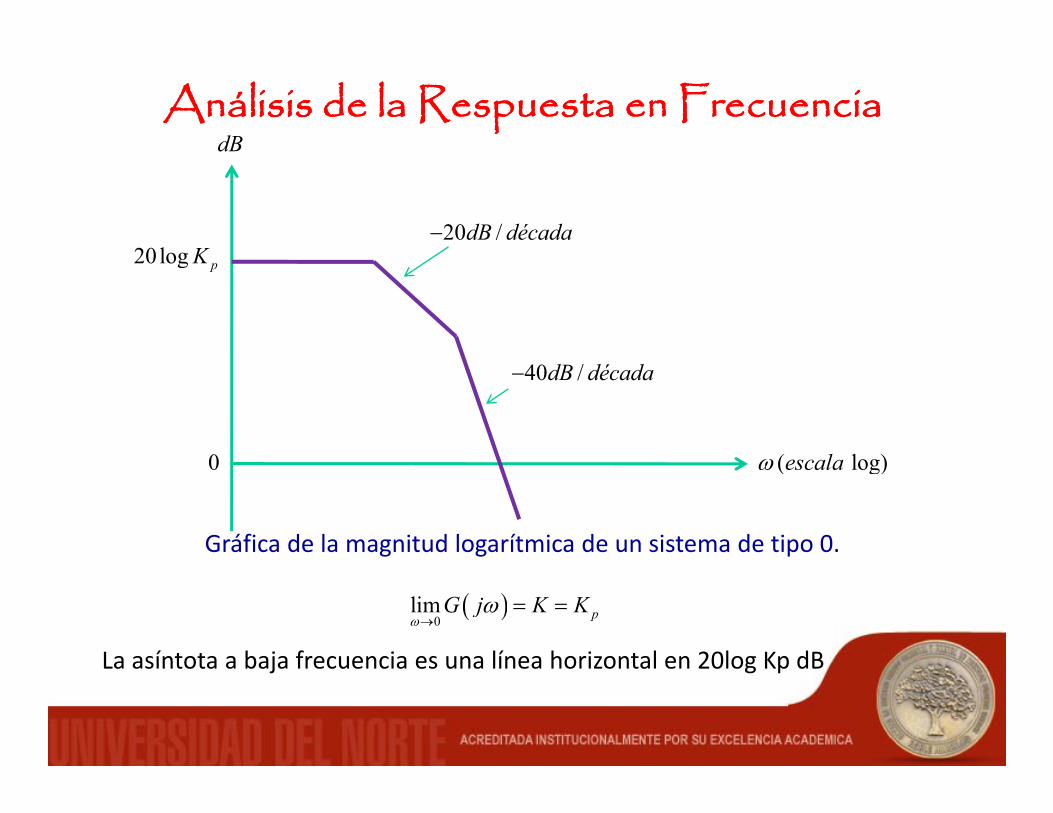
dB
20logK
dB
20 /dB década−20log pK
( l )l0
40 /dB década−
( log)escalaω0
Gráfica de la magnitud logarítmica de un sistema de tipo 0.
( )0
lim pG j K Kω
ω→
= =
La asíntota a baja frecuencia es una línea horizontal en 20log Kp dBLa asíntota a baja frecuencia es una línea horizontal en 20log Kp dB
DETERMINACIÓN DE LAS CONSTANTES DE ERROR ESTÁTICO DE VELOCIDAD.
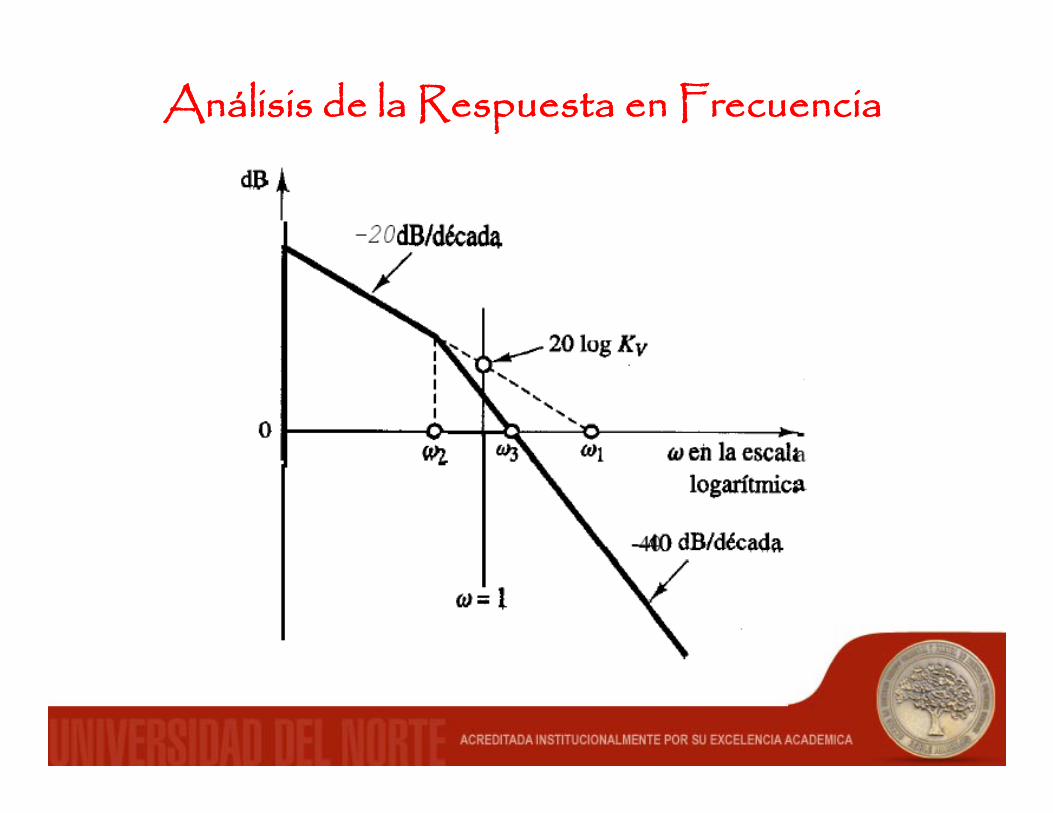
La intersección del segmento inicial ‐20dB/década (o su extensión) con lalínea ω = 1 tiene magnitud de 20logKv.
En un sistema de Tipo 1: ( ) 1vKG j paraj
ω ωω
= <<1
20log 20logvv
K Kj ωω =
⇒ =
La intersección del segmento inicial ‐20dB/década (o su extensión) con lalínea 0dB tiene una frecuencia cuyo valor numérico es igual a Kv. Paraverlo, se define la frecuencia en esta intersección como:e o, se de e a ecue c a e es a e secc ó co o
1 11
, 1vv
Kasí Kj
ω ωω
= ⇒ =
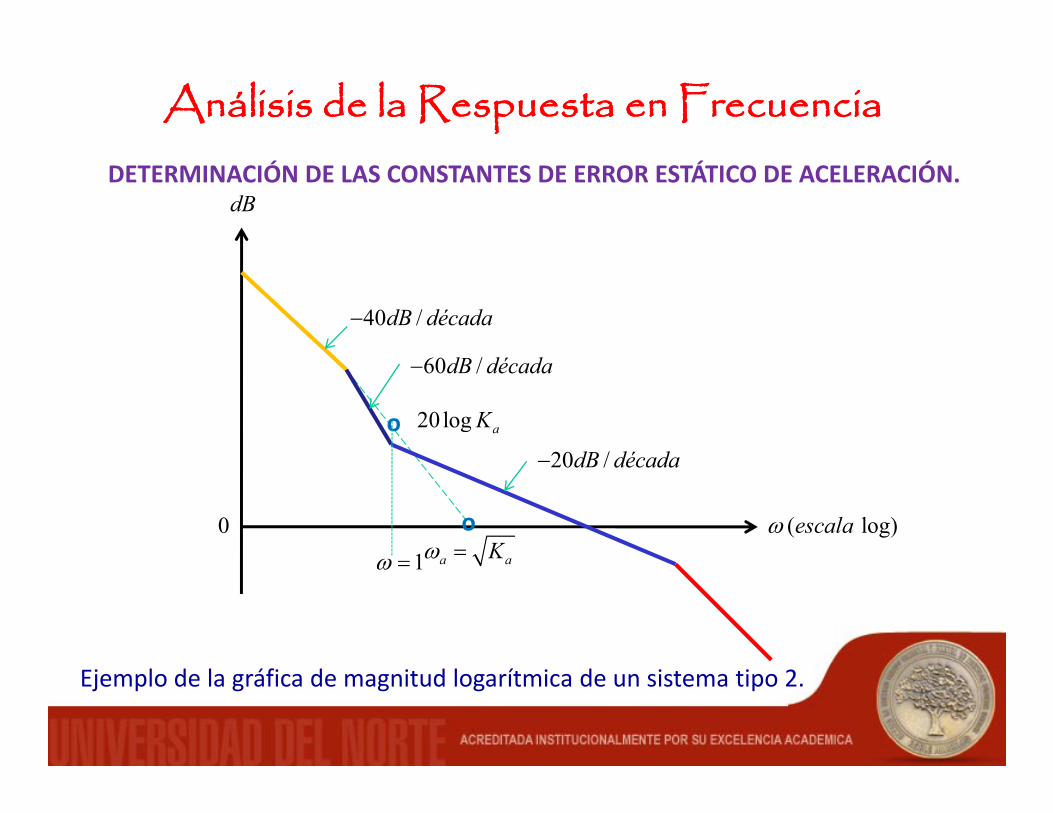
DETERMINACIÓN DE LAS CONSTANTES DE ERROR ESTÁTICO DE ACELERACIÓN. dB
40 /dB década−
o
60 /dB década−
20log aK
20 /dB década
o0 ( log)escalaωa aKω =1ω
20 /dB década−
a a1=ω
Ejemplo de la gráfica de magnitud logarítmica de un sistema tipo 2.
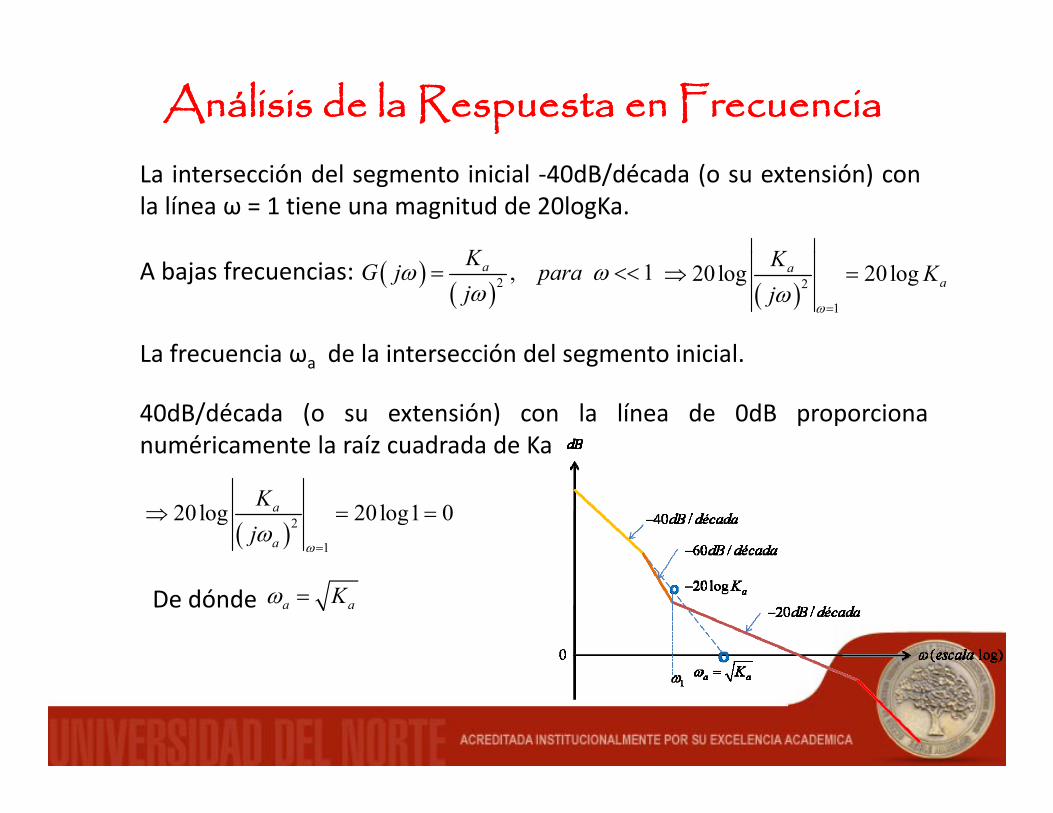
La intersección del segmento inicial ‐40dB/década (o su extensión) conla línea ω = 1 tiene una magnitud de 20logKa.
K KA bajas frecuencias: ( )( )2 , 1aKG j paraj
ω ωω
= <<( )2
1
20 log 20logaa
K Kj
ωω
=
⇒ =
La frecuencia ω de la intersección del segmento inicialLa frecuencia ωa de la intersección del segmento inicial.
40dB/década (o su extensión) con la línea de 0dB proporcionanuméricamente la raíz cuadrada de Ka
( )2
1
20 log 20log1 0a
a
Kj
ωω
=
⇒ = =
De dónde a aKω =
MARGEN DE FASE Y MARGEN DE GANANCIA
Margen de FaseMargen de Fase
Es la cantidad de retardo de fase adicional en la frecuencia de cruce dei id ll l i t l b d d l i t bilid dganancia requerida para llevar el sistema al borde de la inestabilidad.
La frecuencia de cruce de ganancia es la frecuencia en la cual |G(jω)|,magnitud de la función de transferencia en lazo abierto es unitariamagnitud de la función de transferencia en lazo abierto es unitaria.
El margen de fase γ es de 180° más el ángulo de fase φ de la función detransferencia en la o abierto en la frecuencia de cruce de ganancia γtransferencia en lazo abierto en la frecuencia de cruce de ganancia γ =180° + φ.
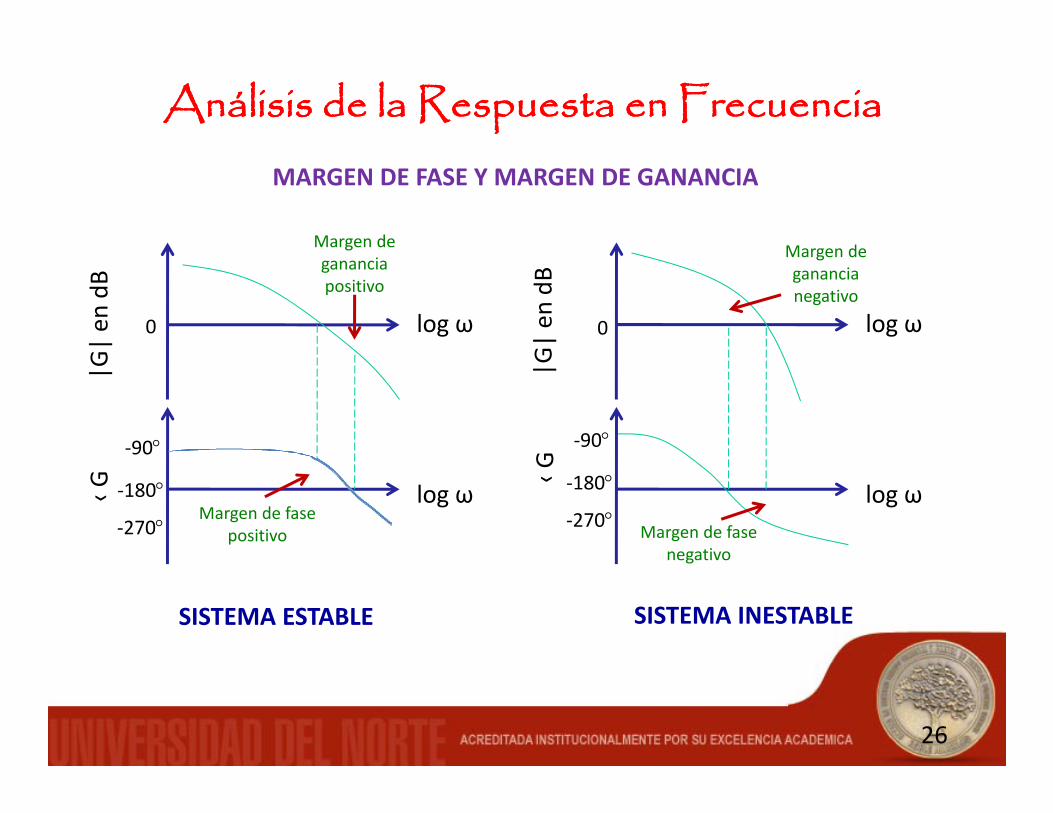
Margen de Margen de
MARGEN DE FASE Y MARGEN DE GANANCIA
G| en
dB
G| en
dB
0 0log ω log ω
ganancia positivo
Margen de ganancia negativo
|G |GG‐90° ‐90°
‹ G
‹ G
‐180°
‐270°
‐180°
‐270°log ω log ω
Margen de fase positivo Margen de fase
negativog
SISTEMA ESTABLE SISTEMA INESTABLE
26
MARGEN DE FASE Y MARGEN DE GANANCIA
Margen de Ganancia
El margen de ganancia es el recíproco de la magnitud |G(jω)| en laEl margen de ganancia es el recíproco de la magnitud |G(jω)| en lafrecuencia a la cual el ángulo de fase es ‐180°.
Si se define la frecuencia de cruce de fase como ω la frecuencia a la cual elSi se define la frecuencia de cruce de fase como ω1 la frecuencia a la cual elángulo de fase de la función de transferencia en lazo abierto es igual a ‐180°, se produce el margen de ganancia Kg.
( )1
1gK G jω=
( )1G jω
En decibelios: 120 log 20log | ( ) |g gK dB K G jω= = −
Un margen de ganancia positivo (en dB) significa que el sistema es estable,y un margen de ganancia negativo (en dB) quiere decir que el sistema esinestable.
Para un sistema estable de fase mínima, el margen de ganancia indicacuánto puede incrementarse la ganancia antes de que el sistema se vuelvainestable.
Para un sistema inestable, el margen de ganancia indica cuánto se debe disminuir la ganancia para que el sistema se vuelva estable.
El margen de ganancia de un sistema de primer o segundo orden es infinito.Por tanto, los sistemas de primer y segundo orden en teoría no pueden serinestables.
Un sistema estable de fase no mínima tendrá márgenes de fase y deganancia negativas.
Debe señalarse que el margen de ganancia o el margen de fase por sí solosno aportan un indicio suficiente de la estabilidad relativa. Debenconsiderarse ambos en la determinación de la estabilidad relativa.
Para un sistema de fase mínima, los márgenes de fase y de ganancia debenser positivos con el fin de que el sistema sea estable.
Los márgenes negativos indican inestabilidad.
Los dos valores delimitan el comportamiento del sistema en lazo cerradopcerca de la frecuencia de resonancia.
Para obtener un rendimiento satisfactorio, el margen de fase debe estarentre 30° y 60° y el margen de ganancia debe ser mayor que 6dB. Con estosvalores, un sistema de fase mínima tiene una estabilidad garantizada, aúncuando la ganancia en lazo abierto y las constantes de tiempo de lascomponentes varíen en un cierto grado.
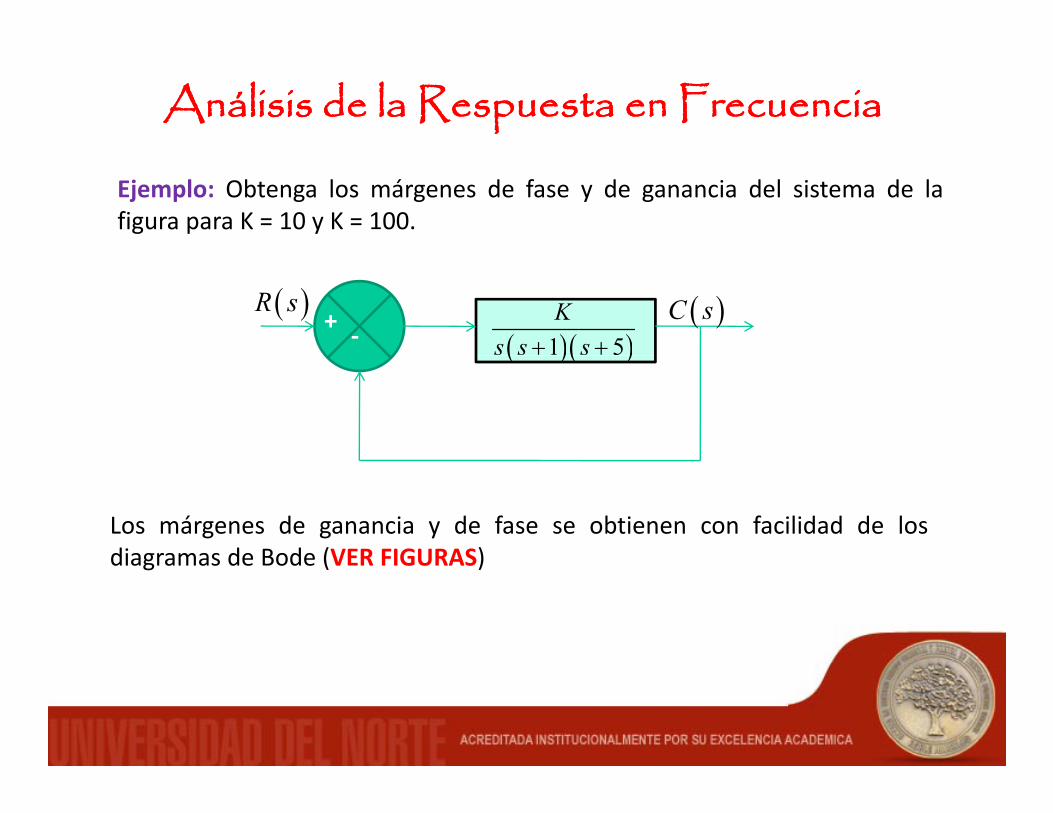
Ejemplo: Obtenga los márgenes de fase y de ganancia del sistema de lafigura para K = 10 y K = 100.
+ ‐( )R s ( )C s
( )( )1 5K
s s s+ +( )( )
Los márgenes de ganancia y de fase se obtienen con facilidad de losdiagramas de Bode (VER FIGURAS)diagramas de Bode (VER FIGURAS)
Los márgenes de fase y de ganancia para K = 10 son:
Margen de Fase = 21° Margen de Ganancia = 8dB
Entonces la ganancia del sistema puede aumentarse en 8dB antes de queEntonces, la ganancia del sistema puede aumentarse en 8dB antes de quese produzca la inestabilidad.
Incrementar la ganancia de K = 10 a K = 100 mueve el eje de 0dB haciaIncrementar la ganancia de K = 10 a K = 100 mueve el eje de 0dB haciadebajo 20 dB.
Los márgenes de fase y de ganancia son:Los márgenes de fase y de ganancia son:
Margen de Fase = ‐30° Margen de Ganancia = ‐12dB
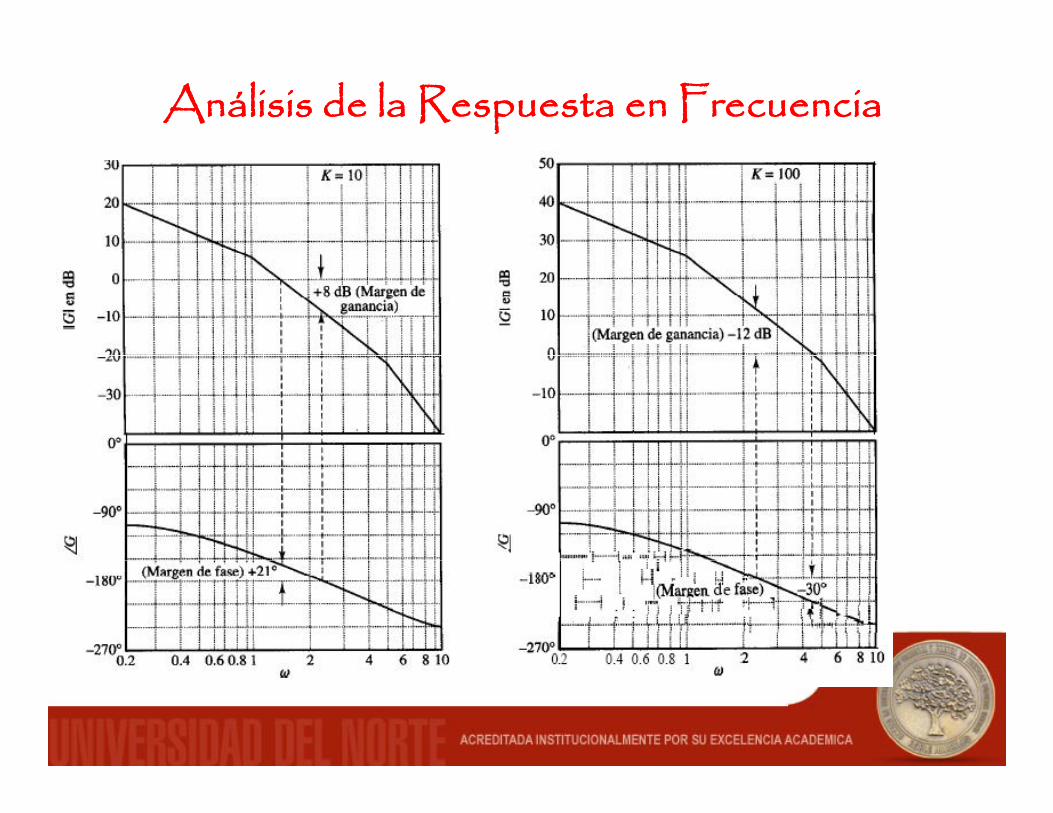
El sistema es estable para K = 10, pero inestable para K = 100.
Para obtener un comportamiento satisfactorio, se debe incrementar elmargen de fase a 30° ‐ 60°. Para ello se disminuye la constante K. Sinembargo, no es conveniente disminuir K, debido a que un valor pequeño deK d i á d l d dK producirá un error grande para la rampa de entrada.

















![La responsabilidad por producto defectuoso … · L A RESPONSABI L IDAD POR PRODUCTO DEFECTUOSO EN L A L EY 1480 DE 2011 [369] R EVISTA DE D E R ECHO P R IVADO, N.º 28, ENE R O -](https://img.pdfslide.es/doc/110x75/5bb9f84f09d3f2fd488d30a4/la-responsabilidad-por-producto-defectuoso-l-a-responsabi-l-idad-por-producto.jpg)