Embed Size (px)
DESCRIPTION
manual psu, ciencias básica cpech fisica preparación
Citation preview
Índice
CAPÍTULO 1: INTRODUCCIÓN A LA FÍSICA
1. Magnitudes físicas: fundamentales y derivadas.2. Sistema de unidades3. Análisis dimensional4. Análisis vectorial
4.1 Vector4.1.1 Características de un vector4.1.2 Representación de un vector en un sistema de coordenadas4.1.3 Vectores unitarios4.1.4 Operaciones entre vectores
CAPÍTULO 2: EL MOVIMIENTO
1. Descripción del movimiento1.1 Velocidad y rapidez1.2 Aceleración1.2.1 Aceleración media1.3 Clasificación de los movimientos1.3.1 Movimiento rectilíneo1.4 Movimientos verticales1.4.1 Caída libre1.4.2 Lanzamiento hacia arriba1.5 Movimiento relativo
2. Fuerza y movimiento2.1 Fuerza y masa2.2 Leyes de Newton2.2.1 Sistema de referencia2.3 Diagrama de cuerpo libre2.4 Fuerzas mecánicas2.4.1 Peso ()2.4.2 Fuerza normal ()2.4.3 Tensión ()2.4.4 Fuerza de roce (Fricción o rozamiento )2.4.5 Fuerza elástica ()2.5 Torque () 2.6 Estática y equilibrio2.7 Impulso y cantidad de movimiento2.7.1 El Momentum y su conservación2.8 Choques2.8.1 Tipos de choques
CAPÍTULO 3: LA ENERGÍA
1. Trabajo mecánico (W)2. Potencia mecánica (P)
2.1 Relación entre potencia y velocidad3. Teorema Trabajo - Energía4. Energía cinética (Ec)5. Energía potencial (Ep)
5.1 Energía potencial gravitatoria5.1.1 Trabajo realizado por la energía potencial gravitatoria5.2 Energía potencial elástica (Ee)5.2.1 Trabajo realizado por la fuerza elástica
6. Energía mecánica (E)6.1 Conservación de la energía mecánica6.1.1 Principio de conservación de la energía mecánica6.1.2 Trabajo realizado por las fuerzas no conservativas
CAPÍTULO 4: El sonido y la luz
1. Vibración y sonido1.1 Oscilaciones1.2 Ondas1.2.1Clasificación de las ondas1.2.2 Representación gráfica de una onda1.2.3 Velocidad de propagación1.3 Fenómenos ondulatorios
2. Ondas y sonido2.1 Características del sonido2.2 Fenómenos ondulatorios asociados al sonido2.3 El oído2.3.1 Recepción del sonido2.3.2 Estructura del oído2.3.3 Transmisión de ondas sonoras
3. La luz3.1 Propagación de la luz3.2 Velocidad de la luz3.3 Transmisión de la luz3.4 Reflexión de la luz3.5 Rayos principales para los espejos esféricos3.6 Formación de imágenes en espejos esféricos3.6.1 Espejo concavo3.6.2 Espejo convexo3.7 Refracción de la luz3.8 Lentes esfericas 3.9 Recepción de imágenes por el ojo humano3.10 Reflexión interna total de la luz3.11 Absorción de la luz3.12 Difracción3.13 Interferencia
4. Naturaleza de la luz ¿ondulatoria o corpuscular?4.1 ¿Por qué percibimos los objetos de diferentes colores?4.2 ¿Qué es un rayo láser?4.3 Instrumentos ópticos
CAPÍTULO 5: LA ELECTRICIDAD
1. Electrostática1.1 Carga Eléctrica1.2 Materiales eléctricos1.3 Métodos de carga eléctrica
2. Electrodinámica2.1 Corriente eléctrica2.2 Ley de Ohm2.2.1 Resistencia eléctrica2.2.2 Resistencia y temperatura2.2.3 El significado energético de la ley de Ohm2.3 Circuitos de corriente continua2.3.1 Disposición de resistencias2.4 Elementos de un circuito2.4.1 Fuerza electromotriz de un generador2.5 Potencia eléctrica2.6 Energía eléctrica2.7 Ley de Joule
3. Generación de energía eléctrica3.1 Centrales hidroeléctricas3.2 Centrales termoeléctricas3.3 Centrales eólicas3.4 Centrales nucleares3.5 Centrales fotovoltaicas3.6 Centrales solares3.7 Centrales geotérmicas3.8 Centrales maremotrices
CAPÍTULO 6: MAGNETISMO
1. Polos magnéticos
1.1 Funcionamiento de los imanes1.2 Materiales magnéticos
2. Campo magnético2.1 Campo magnético terrestre2.2 La brújula2.3 Campo magnético generado por una corriente eléctrica2.4 Relación entre la intensidad y la corriente eléctrica2.5 Corriente eléctrica producida por un campo magnético variable
CAPÍTULO 7: EL CALOR
1. El calor y la temperatura1.1 Medición de la temperatura1.3 Dilatación térmica
2. Materiales y calor2.1 Capacidad calórica y calor específico2.2 Principio de Regnault2.3 Transmisión del calor2.4 Cambios de estado (Fase)2.4.1 Estados de la materia2.4.2 Calor latente de cambio de fase2.4.3 Leyes de cambio de fase2.5 Equivalente mecánico del calor2.6 Transformaciones de energía y su conservación2.7 Los Recursos energéticos2.8 Roce y calor
CAPÍTULO 8: LA TIERRA Y SU ENTORNO
1. Morfología de la Tierra1.1 Nacimiento de la Tierra 1.2 Estructura de la Tierra1.3 Características de la Tierra1.4 Imán terreste1.5 Composición de la Tierra1.6 Estructura de la Tierra1.7 La atmósfera1.8 La hidrosfera1.9 Ciclo del agua1.10 Formación de los continentes
2. El dinamismo del planeta2.1 Interacción entre placas2.2 Procesos modeladores del relieve terrestre2.3 Los sismos2.3.1 Magnitud de escala Richter2.3.2 Intensidad en escala de Mercalli2.3.3 Comportamiento de las ondas sísmicas en las rocas2.3.4 Actividad sísmica en Chile2.4 Clasificación de edificios y estructuras
3. Contaminación3.1 Un ser enfermo: ¿Cómo cuidar la Tierra?3.2 Identificando el virus3.3 Lluvia ácida3.4 ¿Existe remedio para esta enfermedad?
CAPÍTULO 9: LA VÍA LÁCTEA Y EL SISTEMA SOLAR
1. El origen del universo2. Las estrellas
2.1 El Sol3. Las galaxias4. La Vía Láctea5. El sistema solar
5.1. Desarrollo histórico del conocimiento del sistema solar5.2. Características del sistema solar5.3. Los planetas y sus características5.3.1. Nuevos y viejos planetas5.4 Leyes que rigen el sistema solar5.4.1 Leyes de Kepler5.4.2 Gravitación universal de Newton5.5 Los movimientos de la Tierra
6. La Luna: nuestro satélite natural6.1 Fases de la Luna6.2. Los eclipses6.3 Las mareas6.4 El origen de la Luna
Bibliografía General
CAPÍTULO 1: INTRODUCCIÓN A LA FÍSICA
Aprendizajes esperados
Al completar la unidad, alumnos y alumnas podrán:• Relacionar magnitudes físicas con sus respectivas unidades de medida.• Transformar unidades.
La Física se encuentra entre las llamadas ciencias naturales, porquecomprende el estudio de los diferentes procesos y comportamientos que sedan en la naturaleza y que no implican reacciones químicas.
Etimológicamente, la palabra física proviene de “Physis”, que significa“naturaleza”. La Física es la ciencia dedicada al estudio de los componentes dela materia y sus interacciones mutuas, con el objetivo de predecir los fenómenosnaturales.
Uno de los primeros científicos europeos en expresar públicamente que elconocimiento debe basarse en la observación y el experimento, en vez de losantiguos escritos, fue Galileo Galilei (1564-1642).
Él tenía dudas de la física de Aristóteles, especialmente sobre la idea deque los objetos con mayor masa caen más rápidamente que los de menor masa.
Para demostrar su punto de vista, Galileo utilizó un método sistemático: elmétodo científico. Este método se basa en la experimentación sistemática,incluyendo la medición cuidadosa y el análisis de los resultados. De esteanálisis se derivan, entonces, las conclusiones, que se someten a pruebasadicionales para determinar si son válidas o no, proceso que nos permiteacumular información que será utilizada para formular una ley física o proponeruna teoría.
Desde la época de Galileo, los científicos de todo el mundo han utilizadoeste método para entender mejor el Universo.
En el año 1960, durante la undécima conferencia general de pesos ymedidas, se creó el Sistema Internacional de Unidades (S.I.).
1. Magnitudes físicas: fundamentales y derivadas.
• Magnitud física: Es todo aquello que se puede medir.
• Magnitudes fundamentales: Son aquellas que no pueden ser definidaso expresadas a partir de otras, tales como longitud, masa y tiempo.
• Magnitudes derivadas: Son aquellas magnitudes que pueden serexpresadas en función de las magnitudes fundamentales, por ejemplo,velocidad, fuerza, aceleración, etc. Nacen de la combinación de una o másmagnitudes fundamentales.
Ejemplo
2. Sistema de unidades
Es un conjunto mínimo de magnitudes fundamentales y derivadas, cuyaunidad o patrón es arbitraria pero invariable, con las cuales se puede dar unadescripción cuantitativa consistente y precisa de todas las magnitudes de lafísica.
En cada sistema de unidades el valor numérico de la magnitud serádiferente, pues las unidades elegidas son distintas. Es importante notar que laelección es arbitraria.
a. Sistemas más usados
- Sistema Internacional (S.I.)- Sistema cegesimal (C.G.S.)
b. Definición de las unidades fundamentales del Sistema Internacional.
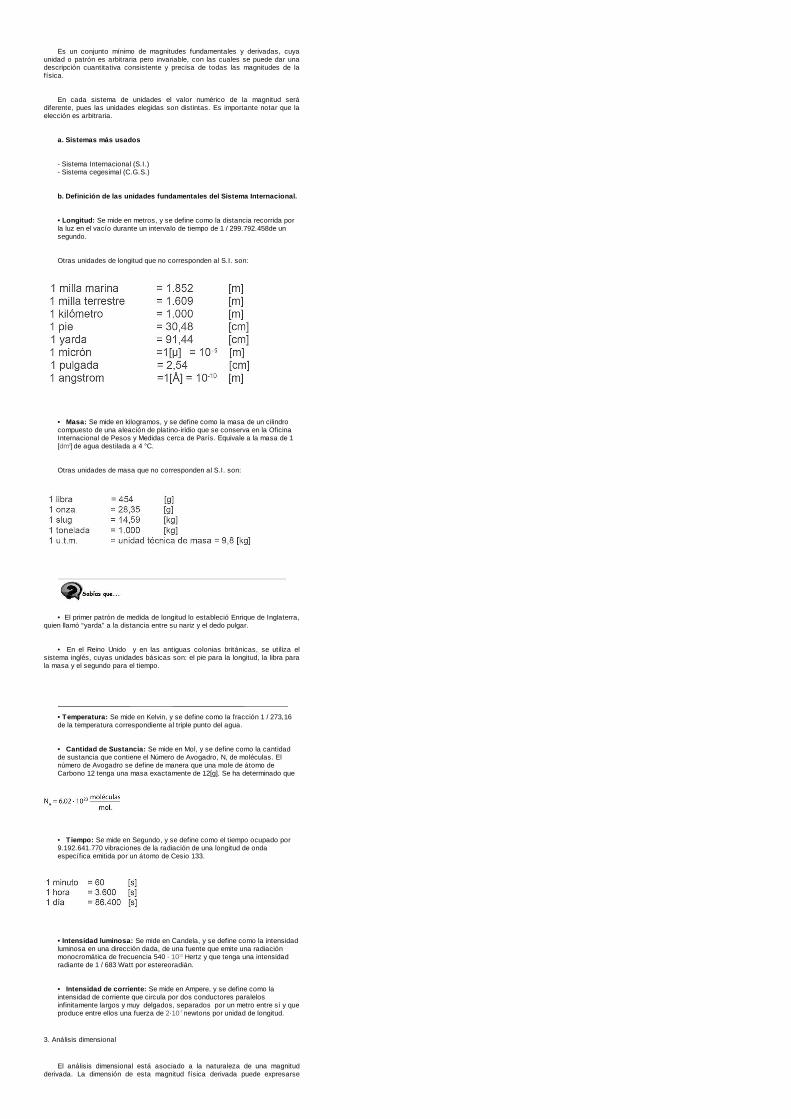
• Longitud: Se mide en metros, y se define como la distancia recorrida porla luz en el vacío durante un intervalo de tiempo de 1 / 299.792.458de unsegundo.
Otras unidades de longitud que no corresponden al S.I. son:
• Masa: Se mide en kilogramos, y se define como la masa de un cilindrocompuesto de una aleación de platino-iridio que se conserva en la OficinaInternacional de Pesos y Medidas cerca de París. Equivale a la masa de 1[dm3] de agua destilada a 4 °C.
Otras unidades de masa que no corresponden al S.I. son:
• El primer patrón de medida de longitud lo estableció Enrique de Inglaterra,quien llamó “yarda” a la distancia entre su nariz y el dedo pulgar.
• En el Reino Unido y en las antiguas colonias británicas, se utiliza elsistema inglés, cuyas unidades básicas son: el pie para la longitud, la libra parala masa y el segundo para el tiempo.
• Temperatura: Se mide en Kelvin, y se define como la fracción 1 / 273,16de la temperatura correspondiente al triple punto del agua.
• Cantidad de Sustancia: Se mide en Mol, y se define como la cantidadde sustancia que contiene el Número de Avogadro, N, de moléculas. Elnúmero de Avogadro se define de manera que una mole de átomo deCarbono 12 tenga una masa exactamente de 12[g]. Se ha determinado que
• T iempo: Se mide en Segundo, y se define como el tiempo ocupado por9.192.641.770 vibraciones de la radiación de una longitud de ondaespecífica emitida por un átomo de Cesio 133.
• Intensidad luminosa: Se mide en Candela, y se define como la intensidadluminosa en una dirección dada, de una fuente que emite una radiaciónmonocromática de frecuencia 540 · 1012 Hertz y que tenga una intensidadradiante de 1 / 683 Watt por estereoradián.
• Intensidad de corriente: Se mide en Ampere, y se define como laintensidad de corriente que circula por dos conductores paralelosinfinitamente largos y muy delgados, separados por un metro entre sí y queproduce entre ellos una fuerza de 2·10-7 newtons por unidad de longitud.
3. Análisis dimensional
El análisis dimensional está asociado a la naturaleza de una magnitudderivada. La dimensión de esta magnitud física derivada puede expresarse
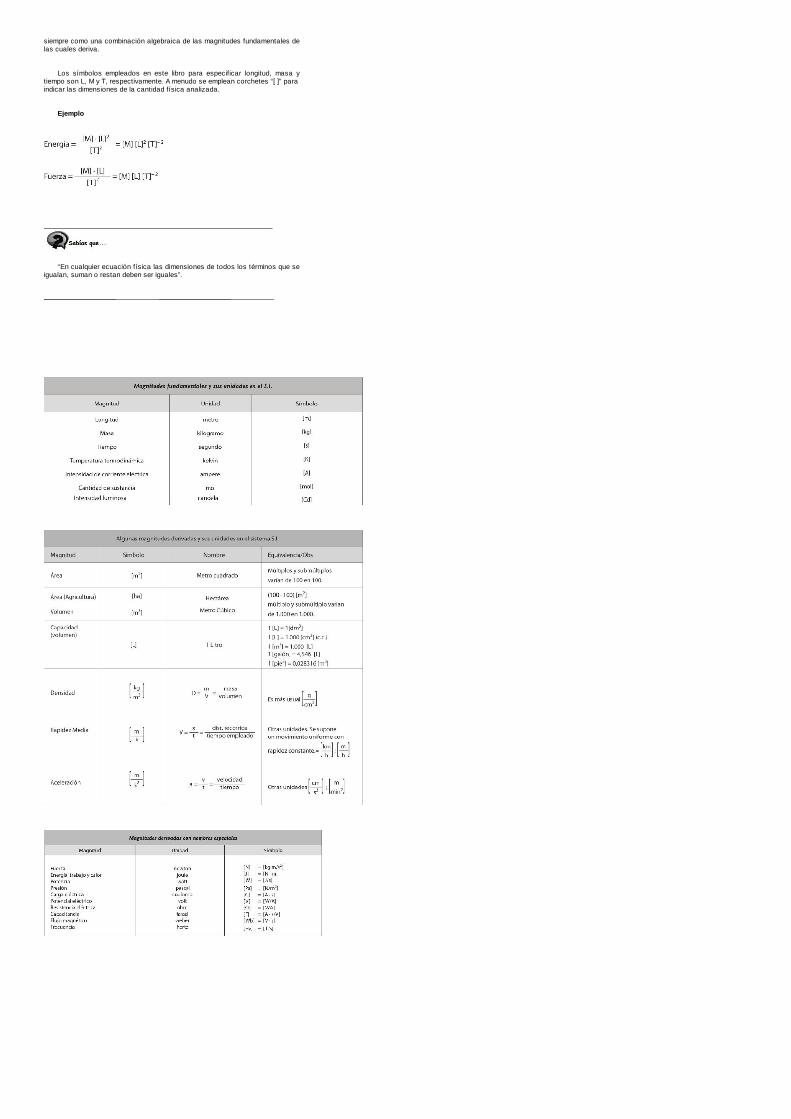
siempre como una combinación algebraica de las magnitudes fundamentales delas cuales deriva.
Los símbolos empleados en este libro para especificar longitud, masa ytiempo son L, M y T, respectivamente. A menudo se emplean corchetes “[ ]” paraindicar las dimensiones de la cantidad física analizada.
Ejemplo
“En cualquier ecuación física las dimensiones de todos los términos que seigualan, suman o restan deben ser iguales”.
Ejemplo
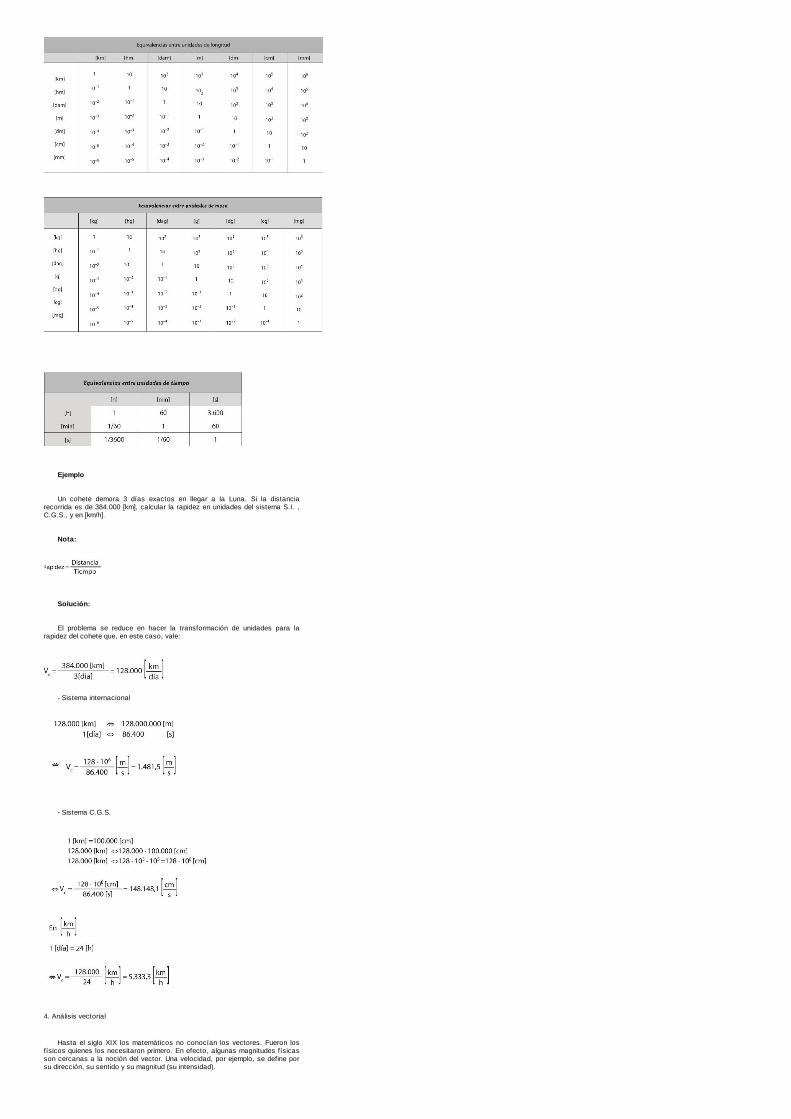
Un cohete demora 3 días exactos en llegar a la Luna. Si la distanciarecorrida es de 384.000 [km], calcular la rapidez en unidades del sistema S.I. ,C.G.S., y en [km/h].
Nota:
Solución:
El problema se reduce en hacer la transformación de unidades para larapidez del cohete que, en este caso, vale:
- Sistema internacional
- Sistema C.G.S.
4. Análisis vectorial
Hasta el siglo XIX los matemáticos no conocían los vectores. Fueron losfísicos quienes los necesitaron primero. En efecto, algunas magnitudes físicasson cercanas a la noción del vector. Una velocidad, por ejemplo, se define porsu dirección, su sentido y su magnitud (su intensidad).
Ahora bien, ¿cómo hacer cálculos sin una teoría matemática que losrespalde? Los físicos descubrieron algunas reglas esenciales, como la suma,resta, multiplicación, entre otras que consideraremos a continuación.
a. Magnitudes escalares
Son aquellas que sólo tienen módulo más la unidad de medida.
Por ejemplo: longitud, tiempo, densidad, área y energía.
b. Magnitudes vectoriales
Son aquellas que, además de módulo y unidad de medida, poseendirección y sentido.
Por ejemplo: desplazamiento, velocidad, aceleración y fuerza.
De esta forma, se habla entonces de que un auto viaja a 100 [km/h] endirección Norte–Sur, sentido Sur, por ejemplo.
4.1 Vector
Un vector está representado por un segmento de recta “orientada”, es decir,posee un sentido señalado mediante una flecha.
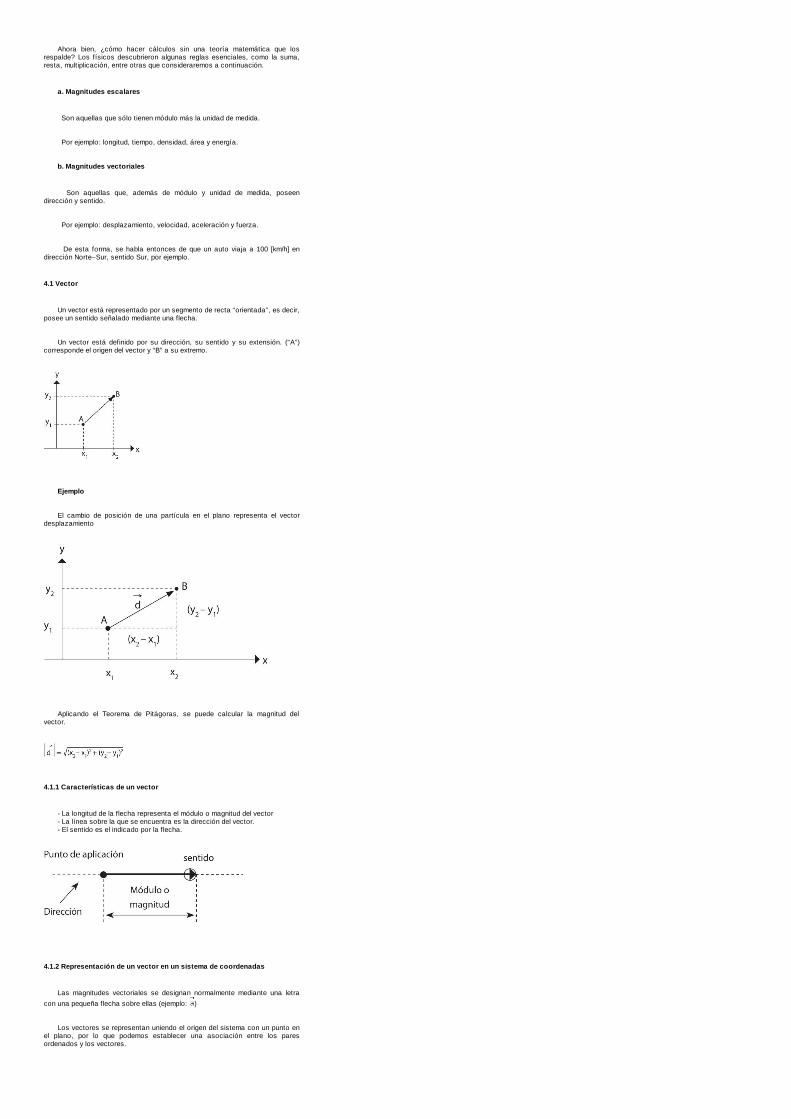
Un vector está definido por su dirección, su sentido y su extensión. (“A”)corresponde el origen del vector y “B” a su extremo.
Ejemplo
El cambio de posición de una partícula en el plano representa el vectordesplazamiento
Aplicando el Teorema de Pitágoras, se puede calcular la magnitud delvector.
4.1.1 Características de un vector
- La longitud de la flecha representa el módulo o magnitud del vector- La línea sobre la que se encuentra es la dirección del vector.- El sentido es el indicado por la flecha.
4.1.2 Representación de un vector en un sistema de coordenadas
Las magnitudes vectoriales se designan normalmente mediante una letra
con una pequeña flecha sobre ellas (ejemplo: )
Los vectores se representan uniendo el origen del sistema con un punto enel plano, por lo que podemos establecer una asociación entre los paresordenados y los vectores.
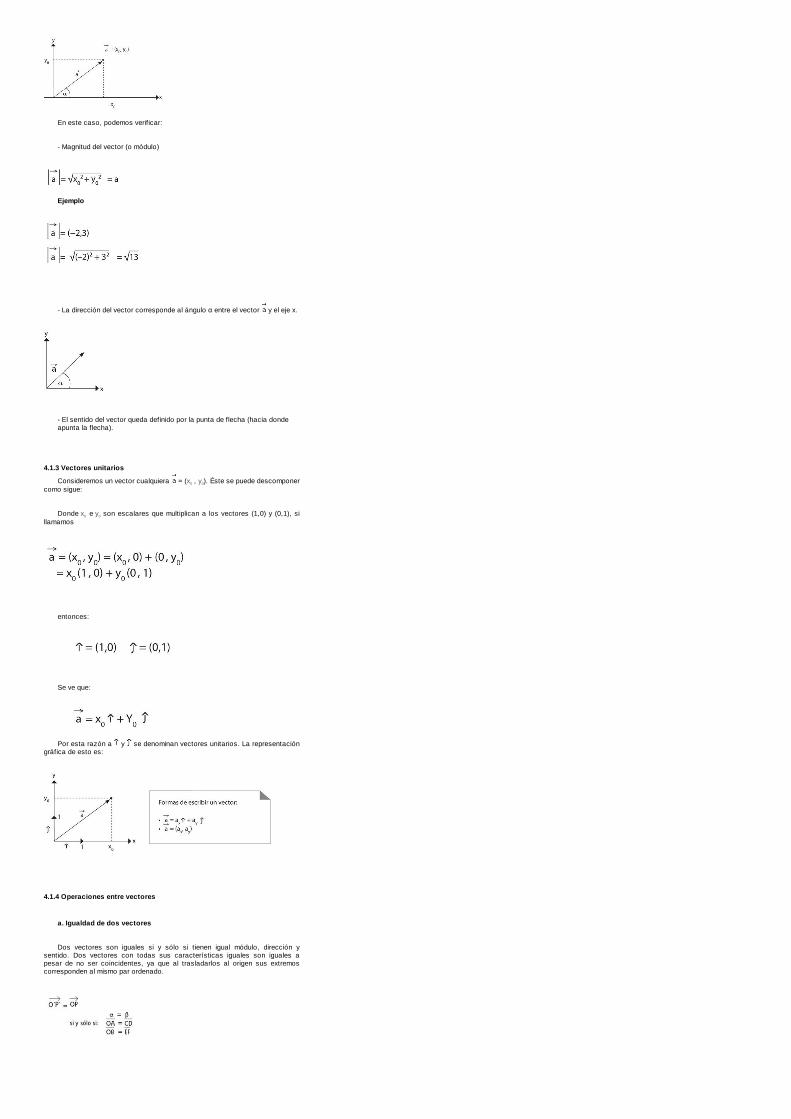
En este caso, podemos verificar:
- Magnitud del vector (o módulo)
Ejemplo
- La dirección del vector corresponde al ángulo α entre el vector y el eje x.
- El sentido del vector queda definido por la punta de flecha (hacia dondeapunta la flecha).
4.1.3 Vectores unitarios
Consideremos un vector cualquiera = (x0 , y0). Éste se puede descomponercomo sigue:
Donde x0 e y0 son escalares que multiplican a los vectores (1,0) y (0,1), sillamamos
entonces:
Se ve que:
Por esta razón a y se denominan vectores unitarios. La representacióngráfica de esto es:
4.1.4 Operaciones entre vectores
a. Igualdad de dos vectores
Dos vectores son iguales si y sólo si tienen igual módulo, dirección ysentido. Dos vectores con todas sus características iguales son iguales apesar de no ser coincidentes, ya que al trasladarlos al origen sus extremoscorresponden al mismo par ordenado.
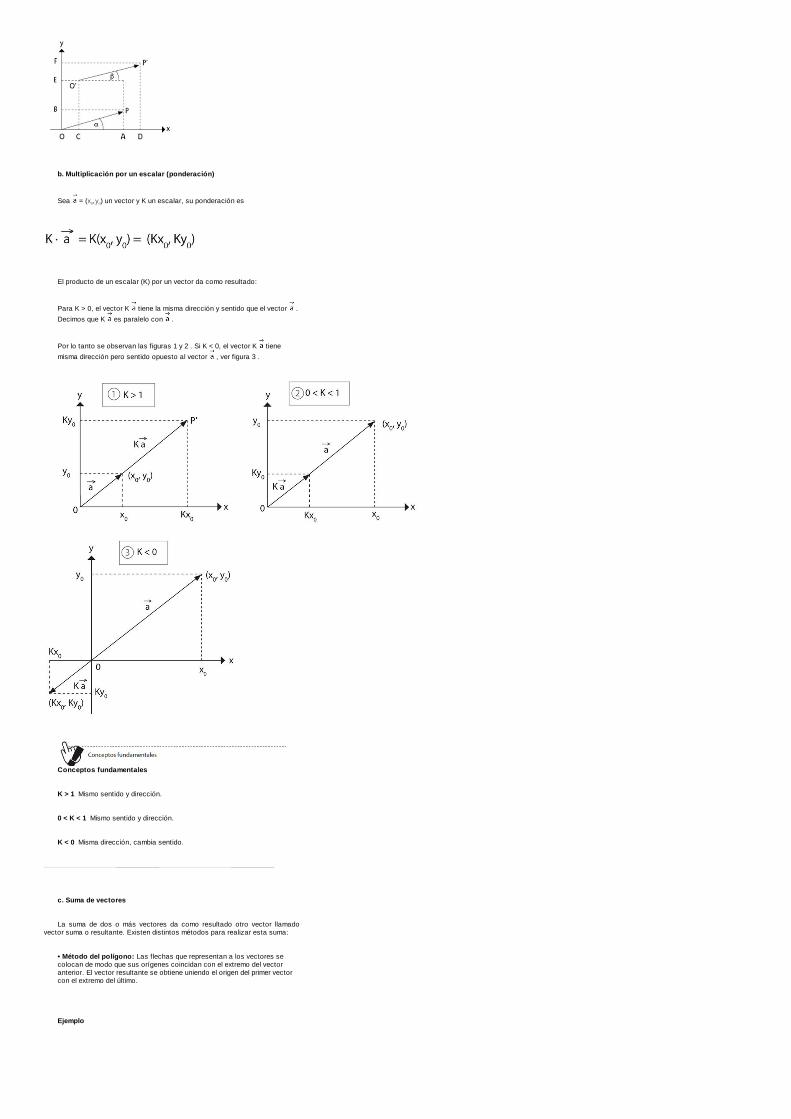
b. Multiplicación por un escalar (ponderación)
Sea = (x0,y0) un vector y K un escalar, su ponderación es
El producto de un escalar (K) por un vector da como resultado:
Para K > 0, el vector K tiene la misma dirección y sentido que el vector .
Decimos que K es paralelo con .
Por lo tanto se observan las figuras 1 y 2 . Si K < 0, el vector K tiene
misma dirección pero sentido opuesto al vector , ver figura 3 .
Conceptos fundamentales
K > 1 Mismo sentido y dirección.
0 < K < 1 Mismo sentido y dirección.
K < 0 Misma dirección, cambia sentido.
c. Suma de vectores
La suma de dos o más vectores da como resultado otro vector llamadovector suma o resultante. Existen distintos métodos para realizar esta suma:
• Método del polígono: Las flechas que representan a los vectores secolocan de modo que sus orígenes coincidan con el extremo del vectoranterior. El vector resultante se obtiene uniendo el origen del primer vectorcon el extremo del último.
Ejemplo
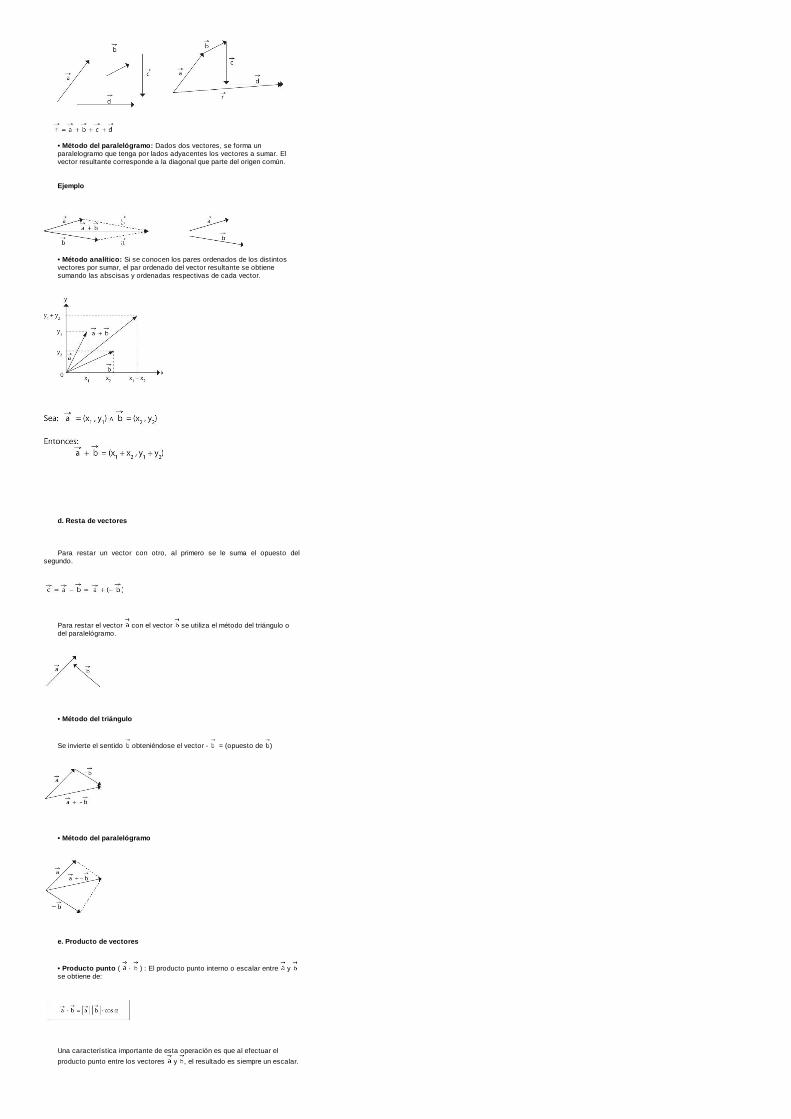
• Método del paralelógramo: Dados dos vectores, se forma unparalelogramo que tenga por lados adyacentes los vectores a sumar. Elvector resultante corresponde a la diagonal que parte del origen común.
Ejemplo
• Método analítico: Si se conocen los pares ordenados de los distintosvectores por sumar, el par ordenado del vector resultante se obtienesumando las abscisas y ordenadas respectivas de cada vector.
d. Resta de vectores
Para restar un vector con otro, al primero se le suma el opuesto delsegundo.
Para restar el vector con el vector se utiliza el método del triángulo odel paralelógramo.
• Método del triángulo
Se invierte el sentido obteniéndose el vector - = (opuesto de )
• Método del paralelógramo
e. Producto de vectores
• Producto punto ( · ) : El producto punto interno o escalar entre y se obtiene de:
Una característica importante de esta operación es que al efectuar el
producto punto entre los vectores y , el resultado es siempre un escalar.
Otra manera de efectuar la misma operación es la siguiente:
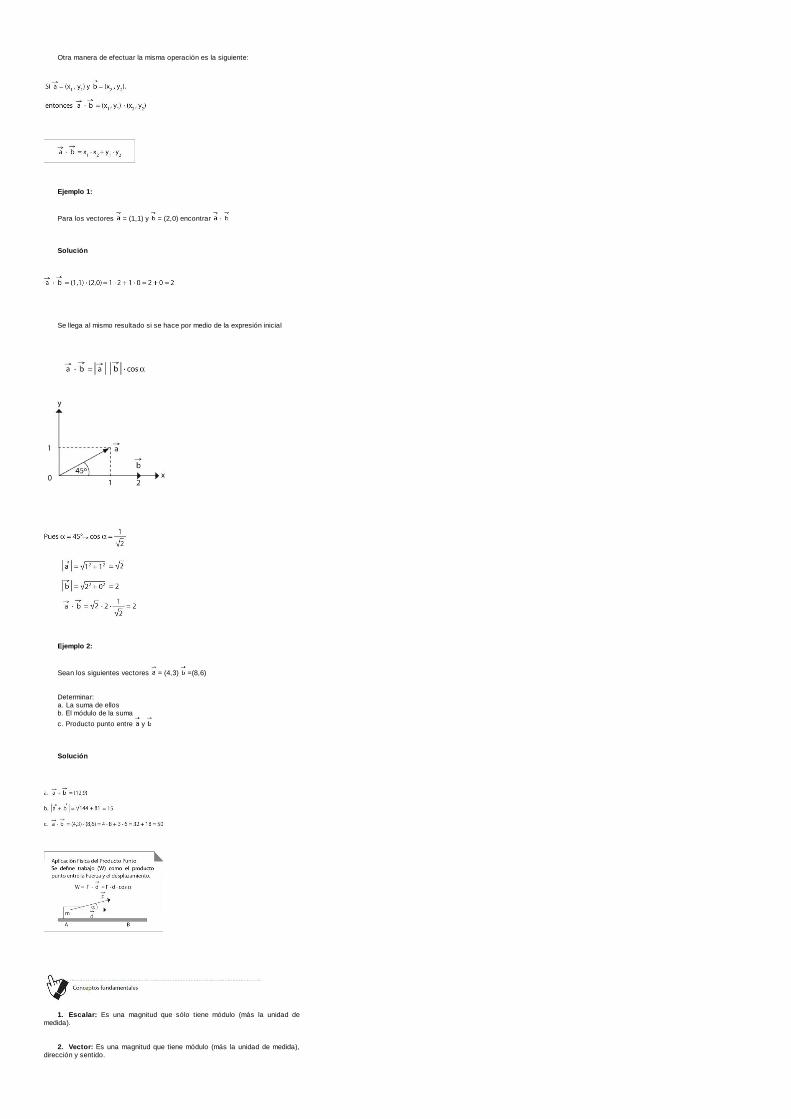
Ejemplo 1:
Para los vectores = (1,1) y = (2,0) encontrar ·
Solución
Se llega al mismo resultado si se hace por medio de la expresión inicial
Ejemplo 2:
Sean los siguientes vectores = (4,3) =(8,6)
Determinar:a. La suma de ellosb. El módulo de la suma
c. Producto punto entre y
Solución
1. Escalar: Es una magnitud que sólo tiene módulo (más la unidad demedida).
2. Vector: Es una magnitud que tiene módulo (más la unidad de medida),dirección y sentido.

CAPÍTULO 2: EL MOVIMIENTO
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Describir el movimiento de un objeto en término de los conceptos físicosrelevantes como velocidad, aceleración, fuerza, cantidad de movimiento,torque, energía, etc.
• Aplicar estos conceptos a situaciones de la vida cotidiana en que semanifiestan.• Reconocer que con ayuda de unos pocos conceptos se pueden describiry entender realidades aparentemente complicadas (cómo y por qué semueve un cuerpo, por ejemplo).• Relacionar cualitativa y cuantitativamente efectos con causas(aceleración con fuerza, etc.).
“En nuestras investigaciones del movimiento natural nos conduce, casi de lamano, la advertencia de la costumbre de la naturaleza que se sirve en todas lasoperaciones de los medios más primordiales y más sencillos”.Galileo Galilei
1. Descripción del movimiento
El comportamiento de todo lo que observamos en la naturaleza, inclusoaquello que se encuentra fuera de nuestro planeta, tiene asociado algún tipo demovimiento. Así como el desplazamiento de las aves en el cielo o la carrera deun jaguar para cazar su presa, cada una de nuestras actividades, hasta la máscotidiana, tiene alguna connotación física con nuestro entorno. El estudio delmovimiento, de sus causas y efectos es lo que hace a la física uno de losmejores puntos de vista científicos para analizar y predecir cada uno de estosfenómenos.
• Cinemática: La cinemática es aquella parte de la física que estudia losmovimientos, sin atender a las causas que lo originan.
Para abordar los conceptos cinemáticos generales, se hace necesariodefinir una serie de elementos físicos fundamentales.
• Se denomina posición de un punto P con respecto a algún sistema dereferencia específico, al vector que abarca desde el origen de ese sistemade coordenadas hasta el punto P.
Se denota generalmente como:
La posición de un determinado punto P dependerá del sistema de referenciaelegido; es decir, del punto arbitrario a partir del cual tracemos nuestro sistemade coordenadas.
Normalmente, ante cualquier situación de análisis cinemático se defineprimero un sistema de referencia adecuado, el cual se mantiene fijo e invariable.A partir de esto, se dice que las posiciones quedan definidas de forma precisarespecto a ese sistema de referencia en particular. En otras palabras, el vectorposición es un vector relativo al origen del sistema de coordenadas elegido.
Para la figura, como
• Un cuerpo corresponde a una partícula o punto material cuando susdimensiones y orientación en el espacio son despreciables para ladescripción particular del fenómeno que se analizará.
• Si un cuerpo o partícula varía su posición respecto a un mismo sistemade referencia arbitrario, se dice que éste ha efectuado un movimiento y, porlo tanto, que el cuerpo adquiere las características cinemáticas de un móvil.
• La curva que une las sucesivas posiciones instantáneas ocupadas por unmóvil corresponde a su trayectoria. Todo cuerpo que manifiestamovimiento, independiente del sistema de referencia utilizado, describe unatrayectoria.
• La distancia total recorrida por el móvil a lo largo de su trayectoria serefiere al camino recorrido o longitud de la trayectoria, desde el puntoinicial al punto final. Corresponde a una magnitud escalar. Normalmente sedenota por la letra S.
• Itinerario: Es la descripción del movimiento, que indica la posición de unmóvil respecto al tiempo.
Desde el punto de vista cinemático, se define como ecuación de itinerarioa la expresión matemática que representa la posición instantánea del móvil.
• Posición Inicial: Corresponde al vector comprendido entre el origen delsistema de referencia y el punto de partida de un móvil. La posición inicial esel vector que indica el punto donde se inició el movimiento.
• Posición Final: Es el vector comprendido entre el origen de un sistema decoordenadas y el punto de llegada del móvil. La posición final es el vectorque indica el punto hasta el cual llegó el móvil.
El vector que abarca desde el punto de partida del móvil a su punto dellegada corresponde al desplazamiento. Este vector indica el cambio deposición del móvil entre los puntos inicial y final de su movimiento,independiente de la trayectoria utilizada.
El vector posición inicial (como todos los vectores que se verán encinemática) está referido a un sistema de coordenadas relativo, elegidopreviamente, por lo que, en general, para sistemas de referencia diferentes setendrán vectores posición diferentes. A esto se refiere que al vector posición selo caracterice como un “vector relativo”, pues depende del sistema de referenciaelegido.
•Desplazamiento y distancia recorridaCuando una partícula se mueve en una dirección, el desplazamiento puede
resultar positivo, negativo o nulo. La distancia recorrida, en cambio, siempre espositiva y no necesariamente coincide con el desplazamiento de la partícula.
El vector desplazamiento corresponde a un vector invariante del sistema dereferencia. Por lo tanto, no depende del sistema de coordenadas utilizado, asícomo tampoco de la trayectoria descrita.
Ya que cualquier vector puede ser representado analíticamente como parordenado:
Por lo tanto, el vector desplazamiento corresponde a la diferencia vectorialentre la posición final e inicial de un móvil.
El desplazamiento siempre está asociado a la trayectoria más corta entredos puntos, por lo tanto, siempre es menor o igual en magnitud a la longitud decualquier trayectoria elegida. Es decir:
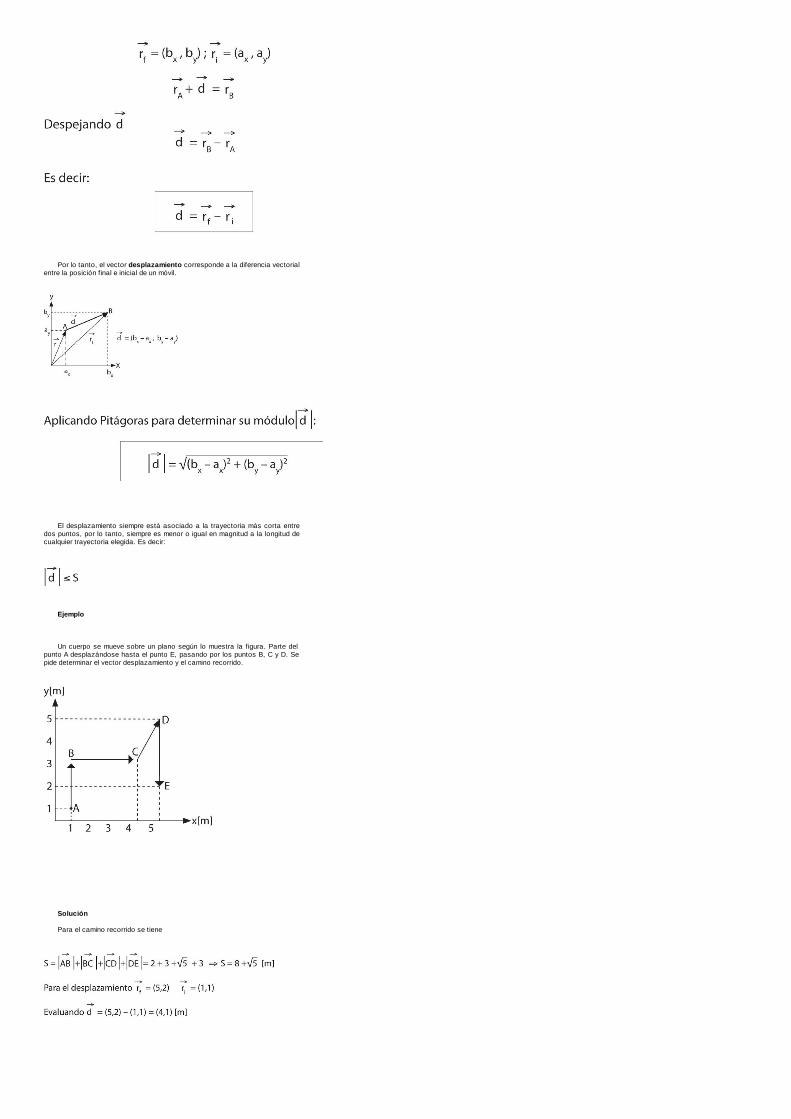
Ejemplo
Un cuerpo se mueve sobre un plano según lo muestra la figura. Parte del punto A desplazándose hasta el punto E, pasando por los puntos B, C y D. Sepide determinar el vector desplazamiento y el camino recorrido.
Solución
Para el camino recorrido se tiene
Unidades de desplazamiento y de camino recorrido
Pese a diferenciarse entre sí por ser una de magnitud vectorial y la otraescalar, dimensionalmente tanto el desplazamiento como el
camino recorrido se representan en unidades de longitud. Esto es:
S. I. : metroSistema C.G.S. : centímetro
El desplazamiento de un móvil corresponde al camino más corto entre dospuntos, no necesariamente al más rápido.
1.1 Velocidad y rapidez
Se define como velocidad media al cuociente entre el desplazamientoefectuado por un móvil y el tiempo empleado en realizarlo.
La velocidad media es un vector, pues proviene de la división del vector por el escalar Δt. Por lo tanto, su dirección y sentido son los mismos que los delvector desplazamiento.
Se entiende por rapidez media al cuociente entre el camino S recorrido porun móvil y el intervalo de tiempo empleado en efectuarlo. Corresponde, por lotanto, a un elemento escalar. Esto es:
Desde el punto de vista físico entendemos que no es lo mismo hablar develocidad que de rapidez, ya que:
Es decir, la rapidez media siempre es mayor o igual que el módulo de lavelocidad media. Por otro lado, un móvil puede desplazarse desde un punto A aun punto B a una velocidad media determinada, pero no necesariamente lo harátodo el tiempo con la misma velocidad. La velocidad instantánea correspondea la velocidad cuando el intervalo de tiempo se hace muy pequeño; estosignifica saber la velocidad del móvil en cualquier instante t a lo largo de sutrayectoria (ya sea rectilínea o curvilínea). Del mismo modo, entendemos porrapidez instantánea a la rapidez del móvil a lo largo de su trayectoria para unintervalo t muy pequeño; esto significa saber la rapidez del móvil en cualquierinstante de su trayectoria. De acuerdo con el diagrama, al considerar intervalosde tiempo muy pequeños la trayectoria parcial del móvil se hace rectilínea y, porlo tanto, coincide en módulo con el camino recorrido en ese intervalo de tiempo.De esto se desprende que la rapidez instantánea coincida con el módulo de lavelocidad instantánea, independientemente de la trayectoria descrita.
Ejemplos
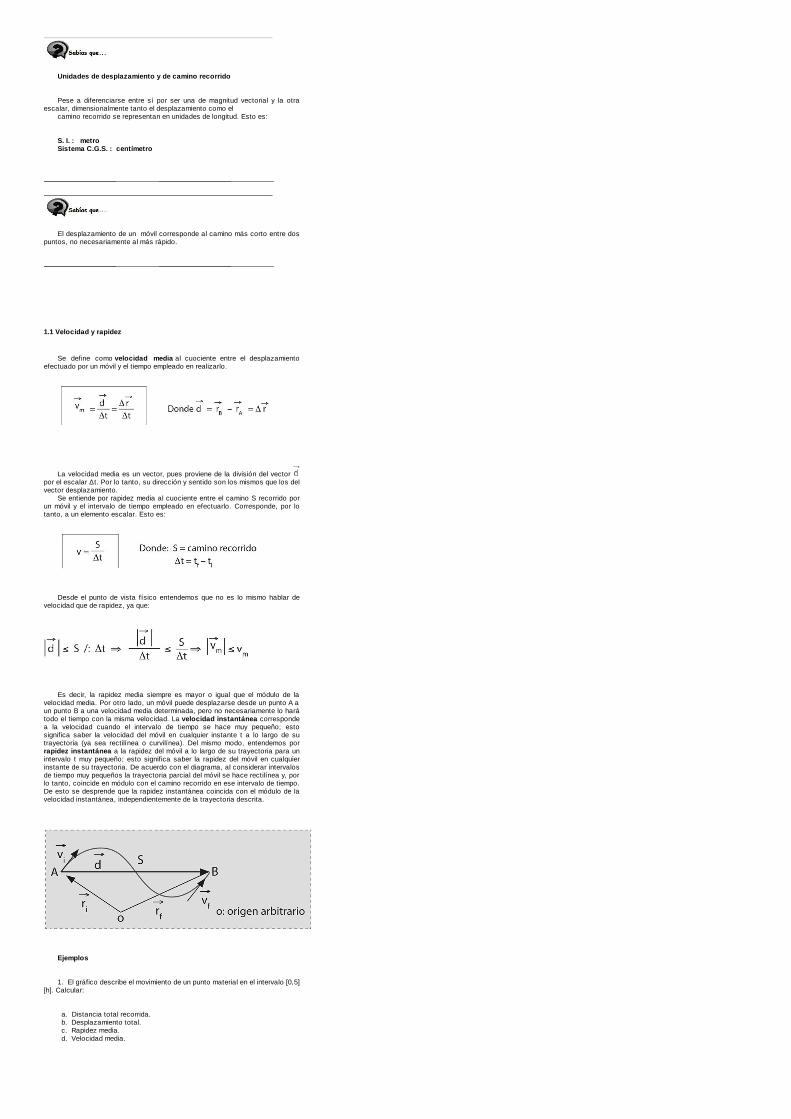
1. El gráfico describe el movimiento de un punto material en el intervalo [0,5][h]. Calcular:
a. Distancia total recorrida. b. Desplazamiento total. c. Rapidez media. d. Velocidad media.
Solución
2. Una persona debe recorrer una distancia de 100 [km] entre dos ciudades.Si lo hace a una rapidez media de 50 [km/h] llega puntualmente a la cita. Porrazones ajenas a su voluntad, recorre la mitad del camino a 40 [km/h]. ¿Con quérapidez media debe recorrer la otra mitad del camino para llegar a la citapuntualmente?
Solución
Unidades de Velocidad y Rapidez
Dimensionalmente, tanto la velocidad como la rapidez se representan como:
Longitud----------------
Tiempo
Luego, las unidades de velocidad y rapidez son:
3. Un automóvil parte desde el origen realizando un movimiento rectilíneo,según muestra el gráfico. Calcular la distancia recorrida entre 0 y 5[s] y larapidez media del movimiento.
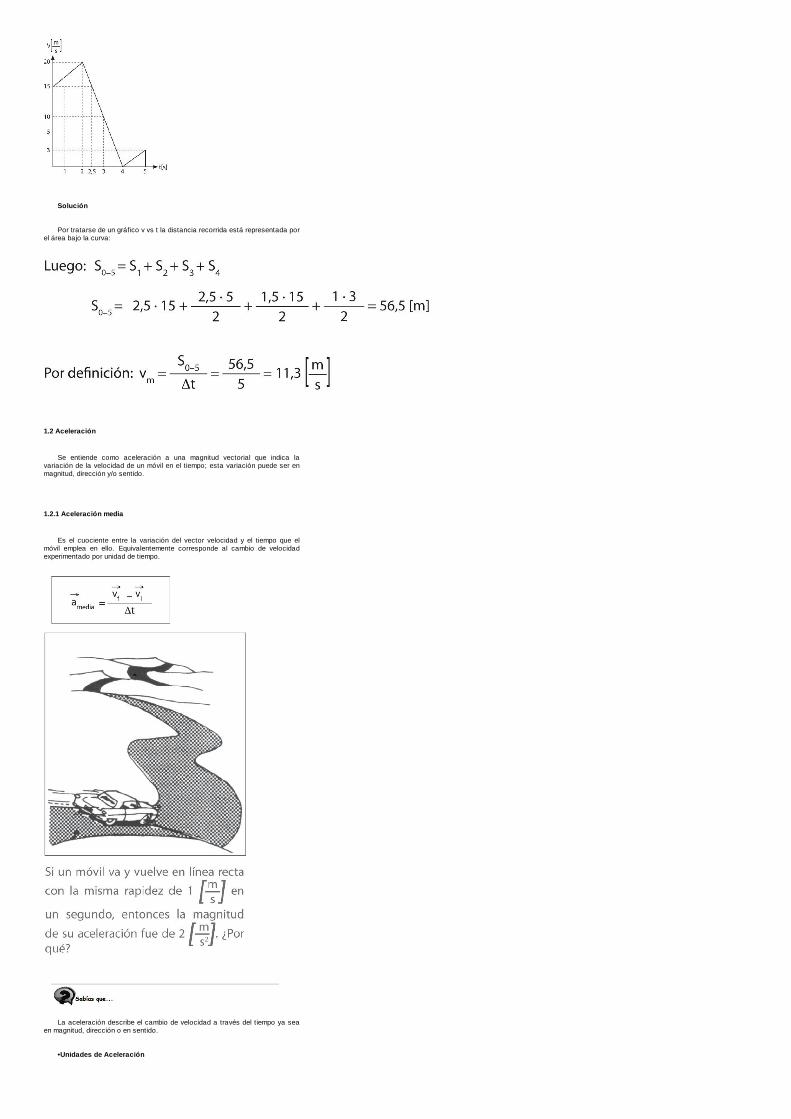
Solución
Por tratarse de un gráfico v vs t la distancia recorrida está representada porel área bajo la curva:
1.2 Aceleración
Se entiende como aceleración a una magnitud vectorial que indica lavariación de la velocidad de un móvil en el tiempo; esta variación puede ser enmagnitud, dirección y/o sentido.
1.2.1 Aceleración media
Es el cuociente entre la variación del vector velocidad y el tiempo que elmóvil emplea en ello. Equivalentemente corresponde al cambio de velocidadexperimentado por unidad de tiempo.
La aceleración describe el cambio de velocidad a través del tiempo ya seaen magnitud, dirección o en sentido.
•Unidades de Aceleración
Dimensionalmente:
Ejemplos
1. Un automóvil se mueve a 90[km/h]. Repentinamente se ve obligado afrenar bruscamente hasta detenerse.
Si emplea 5 [s] en hacerlo, ¿cuál fue su aceleración media?
Solución
Suponiendo el movimiento como rectilíneo, se cumple:
2. Un cuerpo se mueve sobre una línea recta, según lo indica el siguientegráfico velocidad v/s tiempo:
a. Indicar en el gráfico en qué intervalo de tiempo el cuerpo retrocede.b. Si el cuerpo parte del origen, determinar la distancia que recorre cuandoretrocede y la distancia total recorrida.c. ¿Cuál es el desplazamiento total, la velocidad y aceleración media?
Solución
a. Por tratarse de un gráfico v vs t el móvil retrocede en el intervalo en quela velocidad se hace negativa. Esto es: 3,5 y 6,5 segundos.b. Calculando área entre la curva y la abscisa:
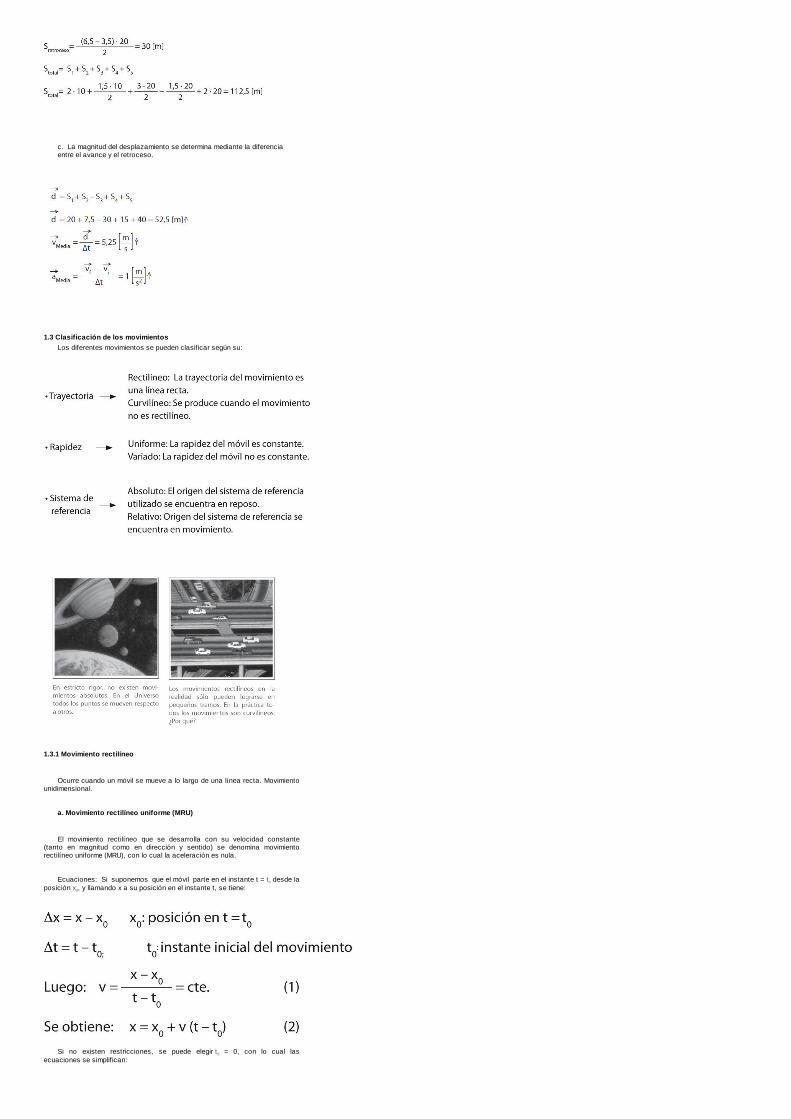
c. La magnitud del desplazamiento se determina mediante la diferenciaentre el avance y el retroceso.
1.3 Clasificación de los movimientosLos diferentes movimientos se pueden clasificar según su:
1.3.1 Movimiento rectilíneo
Ocurre cuando un móvil se mueve a lo largo de una línea recta. Movimientounidimensional.
a. Movimiento rectilíneo uniforme (MRU)
El movimiento rectilíneo que se desarrolla con su velocidad constante(tanto en magnitud como en dirección y sentido) se denomina movimientorectilíneo uniforme (MRU), con lo cual la aceleración es nula.
Ecuaciones: Si suponemos que el móvil parte en el instante t = t0 desde laposición x0, y llamando x a su posición en el instante t, se tiene:
Si no existen restricciones, se puede elegir t0 = 0, con lo cual lasecuaciones se simplifican:
La ecuación (4) se puede escribir como:
Esta ecuación representa la posición de un móvil que describe unmovimiento rectilíneo uniforme en cualquier instante, respecto a un sistema dereferencia determinado. Se denomina ecuación itinerario del MRU.
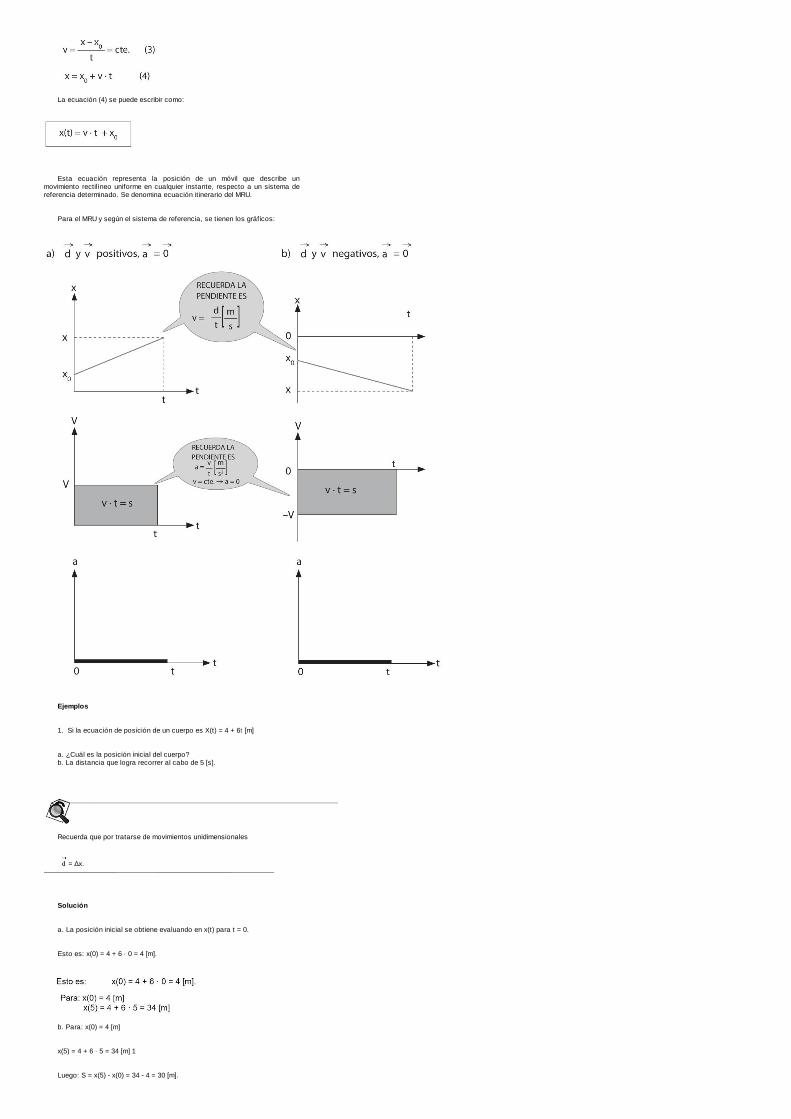
Para el MRU y según el sistema de referencia, se tienen los gráficos:
Ejemplos
1. Si la ecuación de posición de un cuerpo es X(t) = 4 + 6t [m]
a. ¿Cuál es la posición inicial del cuerpo?b. La distancia que logra recorrer al cabo de 5 [s].
Recuerda que por tratarse de movimientos unidimensionales
= ∆x.
Solución
a. La posición inicial se obtiene evaluando en x(t) para t = 0.
Esto es: x(0) = 4 + 6 · 0 = 4 [m].
b. Para: x(0) = 4 [m]
x(5) = 4 + 6 · 5 = 34 [m] 1
Luego: S = x(5) - x(0) = 34 - 4 = 30 [m].
2. La distancia entre Santiago y Valparaíso es de 150 [km]. Desde ambasciudades parten simultáneamente dos automovilistas, uno al encuentro del otro.El automovilista A se mueve con una rapidez constante de 100 [km/h] y el móvilB lo hace con una rapidez constante de 50 [km/h].
a. ¿Cuánto tiempo después de partir se encuentran los automóviles?b. ¿A qué distancia de Santiago y de Valparaíso se encuentra,respectivamente, cada automóvil?c. ¿Cuál es el tiempo total empleado por los automovilistas en cubrir la rutaSantiago - Valparaíso?
Solución
Hay que considerar arbitrariamente el origen del sistema de referencia en elpunto de partida del móvil A.
Por tratarse de dos móviles desplazándose con MRU, se plantean dosecuaciones de movimiento, una para cada móvil. Por tratarse de M.R.U. enambos móviles:
a. Siendo coherentes con el sistema de referencia utilizado, ambos móvilesse encontrarán cuando ocupen la misma posición, es decir:
xA (t) = xB (t)
100 t = 150 – 50 t t = 1 [h]
b. Evaluando el tiempo en que se encuentran ambos móviles:
xA(t = 1) = xB(t = 1) = 100 [km]
Por lo tanto, se encuentran a 100 [km] de Santiago (50 km de Valparaíso).
Movimiento variado
Supongamos que un móvil se mueve entre los puntos A y B.
Un cuerpo tiene un movimiento variado cuando su vector velocidad cambiaa medida que se va desplazando. Por tratarse de un vector, este cambio puedemanifestarse en su magnitud, dirección o sentido.
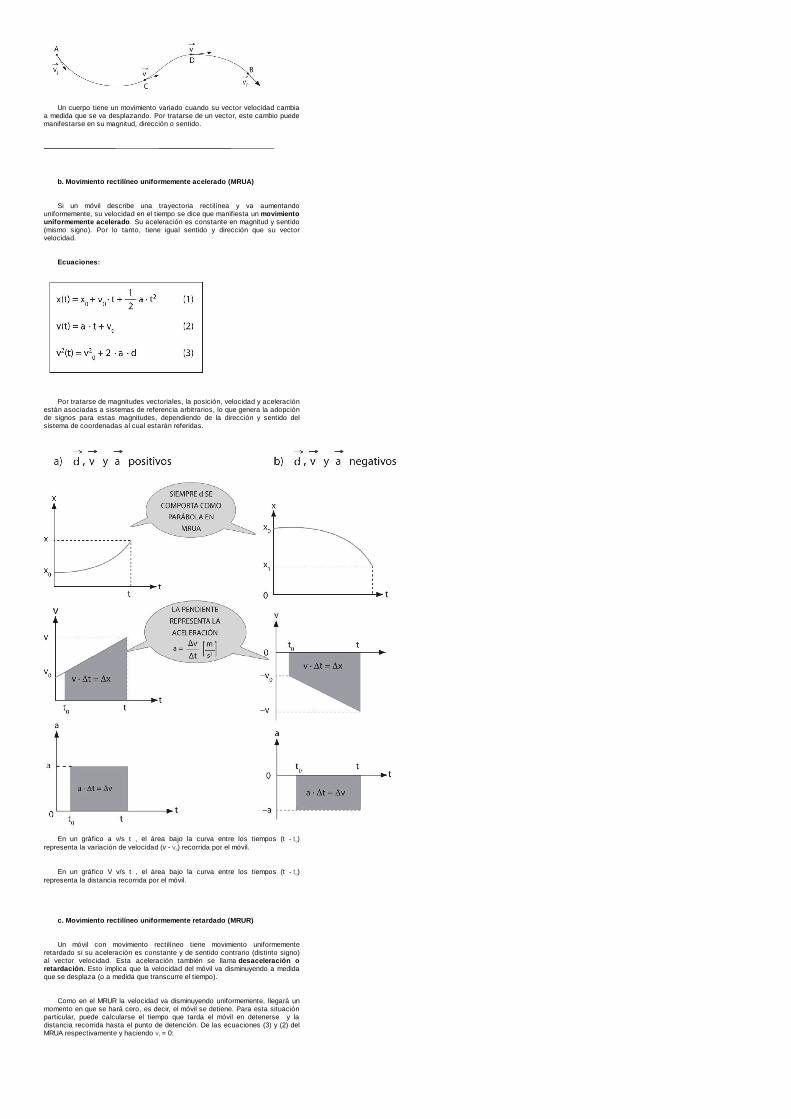
b. Movimiento rectilíneo uniformemente acelerado (MRUA)
Si un móvil describe una trayectoria rectilínea y va aumentandouniformemente, su velocidad en el tiempo se dice que manifiesta un movimientouniformemente acelerado. Su aceleración es constante en magnitud y sentido(mismo signo). Por lo tanto, tiene igual sentido y dirección que su vectorvelocidad.
Ecuaciones:
Por tratarse de magnitudes vectoriales, la posición, velocidad y aceleraciónestán asociadas a sistemas de referencia arbitrarios, lo que genera la adopciónde signos para estas magnitudes, dependiendo de la dirección y sentido delsistema de coordenadas al cual estarán referidas.
En un gráfico a v/s t , el área bajo la curva entre los tiempos (t - t0)representa la variación de velocidad (v - v0) recorrida por el móvil.
En un gráfico V v/s t , el área bajo la curva entre los tiempos (t - t0)representa la distancia recorrida por el móvil.
c. Movimiento rectilíneo uniformemente retardado (MRUR)
Un móvil con movimiento rectilíneo tiene movimiento uniformementeretardado si su aceleración es constante y de sentido contrario (distinto signo)al vector velocidad. Esta aceleración también se llama desaceleración oretardación. Esto implica que la velocidad del móvil va disminuyendo a medidaque se desplaza (o a medida que transcurre el tiempo).
Como en el MRUR la velocidad va disminuyendo uniformemente, llegará unmomento en que se hará cero, es decir, el móvil se detiene. Para esta situaciónparticular, puede calcularse el tiempo que tarda el móvil en detenerse y ladistancia recorrida hasta el punto de detención. De las ecuaciones (3) y (2) delMRUA respectivamente y haciendo vf = 0:
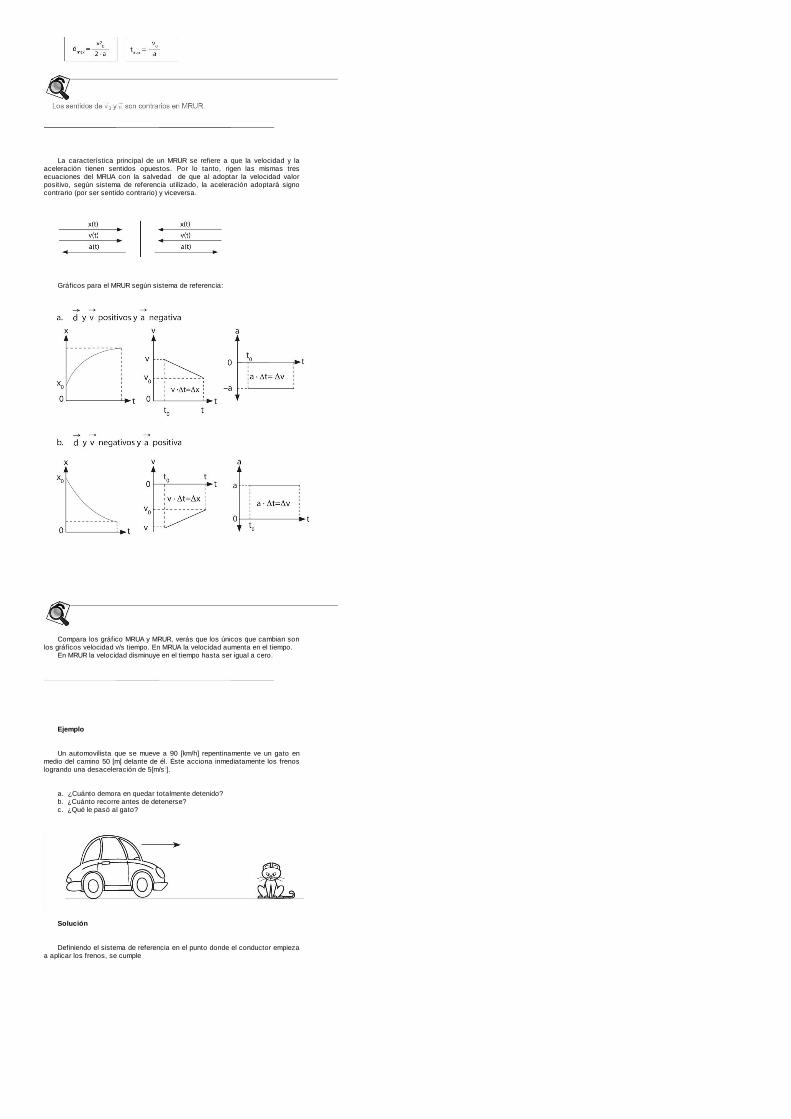
La característica principal de un MRUR se refiere a que la velocidad y laaceleración tienen sentidos opuestos. Por lo tanto, rigen las mismas tresecuaciones del MRUA con la salvedad de que al adoptar la velocidad valorpositivo, según sistema de referencia utilizado, la aceleración adoptará signocontrario (por ser sentido contrario) y viceversa.
Gráficos para el MRUR según sistema de referencia:
Compara los gráfico MRUA y MRUR, verás que los únicos que cambian sonlos gráficos velocidad v/s tiempo. En MRUA la velocidad aumenta en el tiempo.
En MRUR la velocidad disminuye en el tiempo hasta ser igual a cero.
Ejemplo
Un automovilista que se mueve a 90 [km/h] repentinamente ve un gato enmedio del camino 50 [m] delante de él. Éste acciona inmediatamente los frenoslogrando una desaceleración de 5[m/s2].
a. ¿Cuánto demora en quedar totalmente detenido?b. ¿Cuánto recorre antes de detenerse?c. ¿Qué le pasó al gato?
Solución
Definiendo el sistema de referencia en el punto donde el conductor empiezaa aplicar los frenos, se cumple

Con lo cual, v(t) = 25 – 5t = 0 (móvil se detiene) t = 5 [s]
O también:
Si el gato quedo inmóvil de susto, entonces pierde una de sus siete vidas,pues el trecho necesario para que el automóvil se detenga es mayor que ladistancia original entre ellos.
1.4 Movimientos verticales
Todo cuerpo que se mueve libremente y en dirección perpendicular a lasuperficie de la Tierra, está sometido siempre a una aceleración constanteapuntando hacia el centro de la Tierra denominada aceleración de gravedad. Sesimboliza mediante la letra g. Numéricamente, su valor corresponde a:
Para efectos prácticos de operatoria, normalmente se considera
En estricto rigor, el comportamiento cinemático es predictivo sólo si sedesprecia la resistencia del aire, es decir, si el movimiento se produce en elvacío o si la resistencia del aire es muy pequeña.
Analizaremos dos casos particulares de este movimiento:
• Caída libre• Lanzamiento hacia arriba
Cercade la superficie de la Tierra, cuando un cuerpo desciende en caída libre, suvelocidad aumenta 9,8 [m/s] en cada segundo.
Observa que la distancia que recorre aumenta cuadráticamente respecto altiempo…¿ por qué?
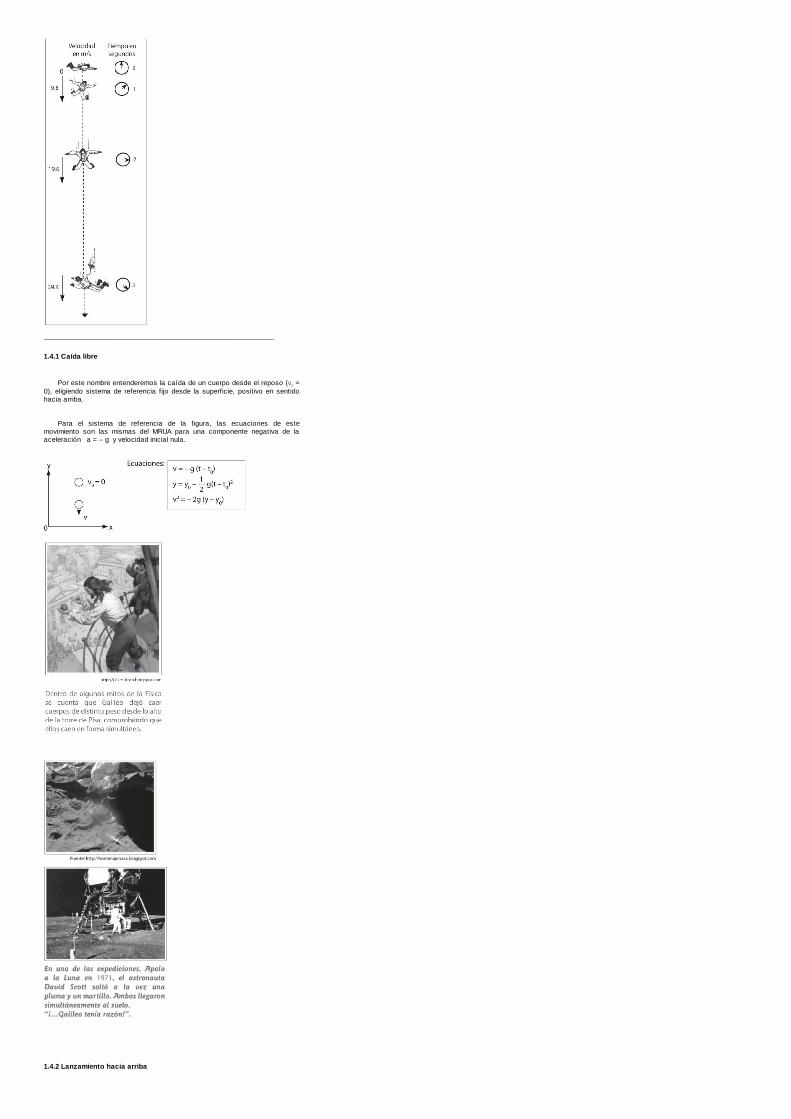
1.4.1 Caída libre
Por este nombre entenderemos la caída de un cuerpo desde el reposo (v0 =0), eligiendo sistema de referencia fijo desde la superficie, positivo en sentidohacia arriba.
Para el sistema de referencia de la figura, las ecuaciones de estemovimiento son las mismas del MRUA para una componente negativa de laaceleración a = – g y velocidad inicial nula.
1.4.2 Lanzamiento hacia arriba
En este caso, el cuerpo es lanzado verticalmente hacia arriba (v0 > 0),utilizando el mismo sistema de referencia del caso anterior:
Para el sistema de referencia de la figura, las ecuaciones de movimiento delLanzamiento hacia arriba son las correspondientes al MRUR para unacomponente negativa de la aceleración (a = –g) y una componente positiva dela velocidad inicial (v0).
Enel lanzamiento vertical hacia arriba el módulo de la velocidad disminuyegradualmente, hasta que se anula, cuando alcanza la altura máxima. Entonces,el móvil inicia un movimiento de caída libre.
Del análisis de estas ecuaciones se deduce que :
• El tiempo de subida es igual al tiempo de bajada, de modo que el tiempo devuelo será:
• La velocidad inicial de subida es igual en módulo a la velocidad final debajada.
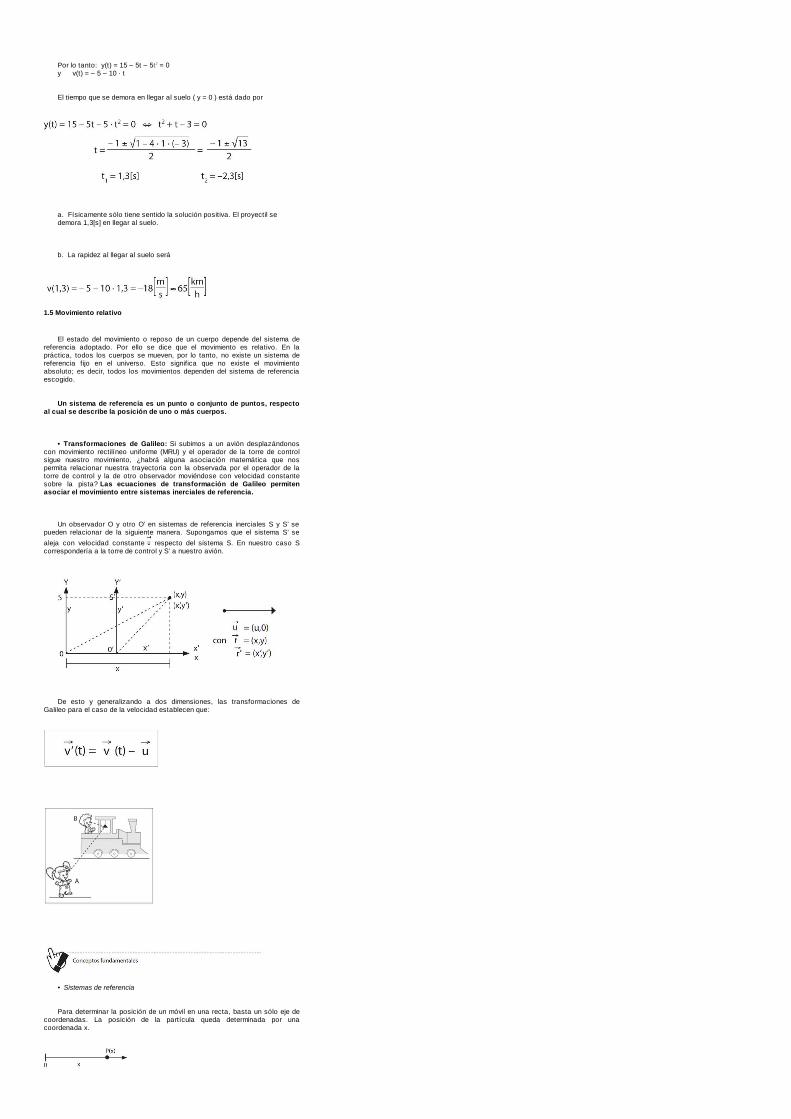
Los gráficos itinerario, velocidad y aceleración para la Caída Libre, segúnorigen del sistema de referencia ya sea el suelo o el punto desde donde sesuelta el cuerpo:
Gráficos itinerario, velocidad y aceleración para un Lanzamiento Verticalhacia Arriba, según origen del sistema de referencia:

Ejemplos
1. Un corsario inglés muy famoso en los siete mares, durante una de susgrandes batallas, se equivocó y por accidente disparó su cañón verticalmentehacia arriba y sobre ellos mismos. Él sabía que demoraba en abandonar elbarco 15[s], y que la velocidad inicial de la bala de cañón era de 50[m/s], por loque luego de sacar algunas cuentas se sentó sobre un barril en cubierta y sepuso a llorar. ¿Por qué se puso tan triste el capitán? ¿ Qué altura alcanzó labala?
Solución
Utilizando el sistema de referencia anterior y de acuerdo con la deducciónse sabe:
Por lo tanto, el tiempo que se demora la bala en volver a cubierta es de t to ta l
= 2 · 5 = 10[s], pero el tiempo que se demora el capitán en abandonar el barcoes mayor (15[s] ).
La altura que alcanzará la bala es:
2. Un niño desea enseñarle a volar a su mascota. Para tal efecto, dejacaer libremente al felino desde la azotea de un edificio de 20[m] de altura. Elgato sabe que puede caer bien siempre que la velocidad al llegar al suelo seaigual o menor a 60[km/h]. ¿Cuánto tiempo alcanza a practicar vuelo libre elgato? ¿Cuántas vidas le quedan después de esta práctica deportiva?
Solución
De las ecuaciones de MRUA considerando sistema de referencia inferior eny = 0, se deduce:
El gato cae durante dos segundos (aproximadamente.)
Como la rapidez al llegar al suelo es mayor que la que puede soportar elgato, entonces éste pierde una de sus siete vidas.
3. Un niño le regala una sandía a otro, pero para que la reciba lo másrápido posible, la arroja desde la ventana de su departamento (a 15 metros dealtura). La sandía sale con una velocidad de 5[m/s] hacia abajo. Calcular:
a. Tiempo que se demora el amigo en recibir el obsequio. b. Rapidez de la sandía al momento de recibirla el amigo.
Solución
Por tratarse de un movimiento vertical de ecuaciones de MRUA
Considerando sistema de referencia inferior en y = 0, se deduce:
Condiciones Iniciales:
Por lo tanto: y(t) = 15 – 5t – 5t2 = 0y v(t) = – 5 – 10 · t
El tiempo que se demora en llegar al suelo ( y = 0 ) está dado por
a. Físicamente sólo tiene sentido la solución positiva. El proyectil sedemora 1,3[s] en llegar al suelo.
b. La rapidez al llegar al suelo será
1.5 Movimiento relativo
El estado del movimiento o reposo de un cuerpo depende del sistema dereferencia adoptado. Por ello se dice que el movimiento es relativo. En lapráctica, todos los cuerpos se mueven, por lo tanto, no existe un sistema dereferencia fijo en el universo. Esto significa que no existe el movimientoabsoluto; es decir, todos los movimientos dependen del sistema de referenciaescogido.
Un sistema de referencia es un punto o conjunto de puntos, respectoal cual se describe la posición de uno o más cuerpos.
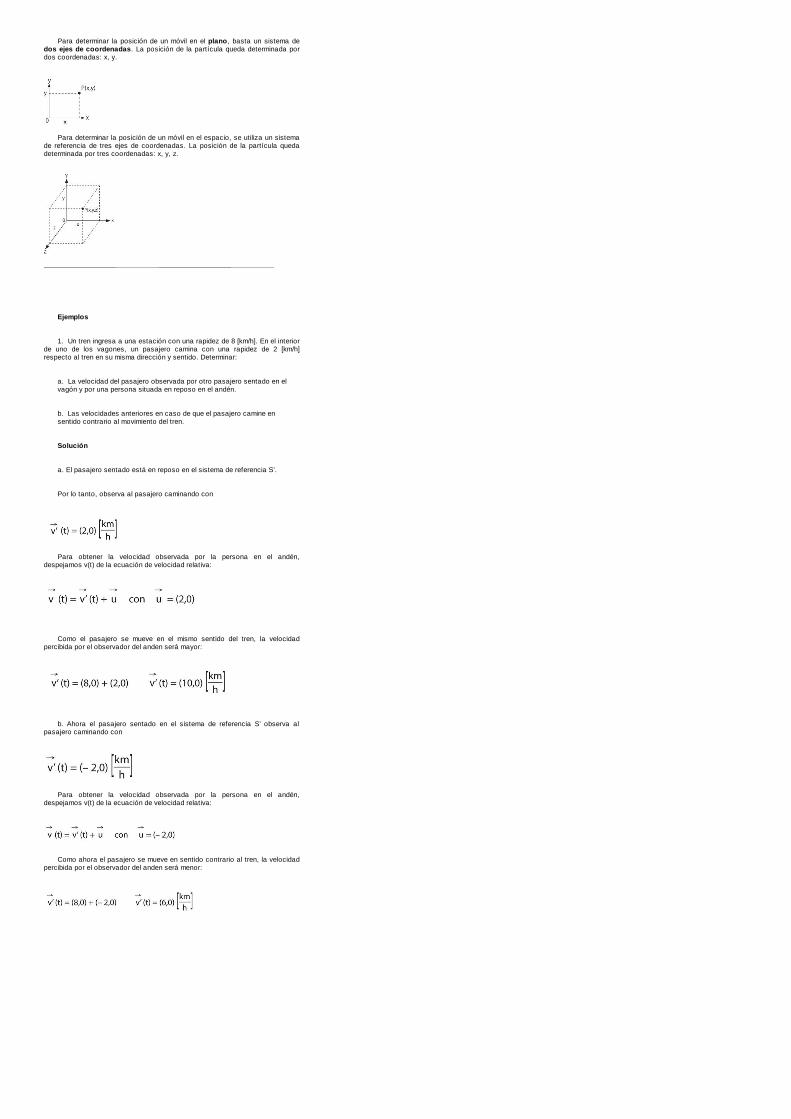
• Transformaciones de Galileo: Si subimos a un avión desplazándonoscon movimiento rectilíneo uniforme (MRU) y el operador de la torre de controlsigue nuestro movimiento, ¿habrá alguna asociación matemática que nospermita relacionar nuestra trayectoria con la observada por el operador de latorre de control y la de otro observador moviéndose con velocidad constantesobre la pista? Las ecuaciones de transformación de Galileo permitenasociar el movimiento entre sistemas inerciales de referencia.
Un observador O y otro O’ en sistemas de referencia inerciales S y S’ sepueden relacionar de la siguiente manera. Supongamos que el sistema S’ se
aleja con velocidad constante respecto del sistema S. En nuestro caso Scorrespondería a la torre de control y S’ a nuestro avión.
De esto y generalizando a dos dimensiones, las transformaciones deGalileo para el caso de la velocidad establecen que:
• Sistemas de referencia
Para determinar la posición de un móvil en una recta, basta un sólo eje decoordenadas. La posición de la partícula queda determinada por unacoordenada x.
Para determinar la posición de un móvil en el plano, basta un sistema dedos ejes de coordenadas. La posición de la partícula queda determinada pordos coordenadas: x, y.
Para determinar la posición de un móvil en el espacio, se utiliza un sistemade referencia de tres ejes de coordenadas. La posición de la partícula quedadeterminada por tres coordenadas: x, y, z.
Ejemplos
1. Un tren ingresa a una estación con una rapidez de 8 [km/h]. En el interiorde uno de los vagones, un pasajero camina con una rapidez de 2 [km/h]respecto al tren en su misma dirección y sentido. Determinar:
a. La velocidad del pasajero observada por otro pasajero sentado en elvagón y por una persona situada en reposo en el andén.
b. Las velocidades anteriores en caso de que el pasajero camine ensentido contrario al movimiento del tren.
Solución
a. El pasajero sentado está en reposo en el sistema de referencia S’.
Por lo tanto, observa al pasajero caminando con
Para obtener la velocidad observada por la persona en el andén,despejamos v(t) de la ecuación de velocidad relativa:
Como el pasajero se mueve en el mismo sentido del tren, la velocidadpercibida por el observador del anden será mayor:
b. Ahora el pasajero sentado en el sistema de referencia S’ observa alpasajero caminando con
Para obtener la velocidad observada por la persona en el andén,despejamos v(t) de la ecuación de velocidad relativa:
Como ahora el pasajero se mueve en sentido contrario al tren, la velocidadpercibida por el observador del anden será menor:

Las ecuaciones de transformación de Galileo permiten asociar el movimientoentre diferentes sistemas inerciales de referencia.
2. Un bote navega por un río con una rapidez de 5,7 [m/s] respecto alsistema de referencia S de la orilla, y de 7,5 [m/s] respecto al sistema dereferencia S’ del río. Considerando que la orilla y las trayectorias del bote y delrío son paralelas, determinar:
a. La velocidad relativa del río respecto a la orilla.
b. La distancia que recorrió el bote respecto del río, si recorrió 100 [m]respecto de la orilla.
Solución
a. Considerar sólo la dirección del movimiento y aplicar la fórmula clásicade adición de velocidades.
Aplicando ecuación itinerario MRU en sistema S’
El signo indica que el sentido de avance del río respecto a la orilla escontrario al sentido de avance del bote.
b. Determinar el tiempo transcurrido y considerar x0 = x0’ = 0. Por tratarse deun MRU en sistema S:
Aplicando ecuación itinerario MRU en sistema S’
2. Fuerza y movimiento
Aquella parte de la Física que se encarga de analizar la causa de losmovimientos corresponde a la Dinámica. Una vez conocido el origen delmovimiento, a través de la dinámica se puede determinar cómo se desarrollará describiéndolo por medio de la Cinemática.
2.1 Fuerza y masa
Fuerza es la interacción entre dos o más cuerpos que puede causar elcambio de su movimiento. Fuerzas constantes dan origen a cambiosprogresivos del movimiento de un cuerpo o partícula en el tiempo.
Ejemplo
El Movimiento Uniformemente Acelerado (MRUA), así como el retardado(MRUR), son producidos al aplicar fuerzas externas constantes.
Las fuerzas instantáneas son de gran magnitud y dan origen a cambiosbruscos en el movimiento de un cuerpo.
Ejemplo
El puntapié a una pelota de fútbol corresponde a la aplicación de una fuerzaen un intervalo de tiempo muy pequeño (infinitesimal).
• Masa inercial: Es la relación que existe entre la fuerza aplicada en uncuerpo y la aceleración adquirida por éste. Es decir:
• Masa gravitatoria: Es la relación que existe entre el peso de un cuerpo yla aceleración de gravedad. Es decir:
2.2 Leyes de Newton
Sir Isaac Newton formuló en julio de 1687 las tres leyes sobre la Dinámica,las cuales permiten determinar cómo será el movimiento a partir de las causasque lo originaron.
• Primera ley de Newton (ley de inercia): “Todo cuerpo en reposo tiende aseguir en reposo, así como todo cuerpo en movimiento tiende a seguir unmovimiento uniforme y rectilíneo; a menos que una fuerza externa lo saque deese estado”.
De esto se desprende la condición de equilibrio de traslación: Si la sumade las fuerzas externas que actúan sobre un cuerpo es cero, el cuerpo está enreposo o tiene movimiento uniforme y rectilíneo:
• Segunda ley de Newton (ley fundamental de la dinámica): “Si sobre uncuerpo actúa una fuerza neta, éste adquiere una aceleración que esproporcional a dicha fuerza, e inversamente proporcional a la masa inercial delcuerpo”.
Donde:
Ejemplos
1. Si se hace avanzar un carro de 10 [kg] de masa desde el reposoaplicando una fuerza constante de 100 [N].
a. ¿Qué velocidad lleva a los 5 [s] ?b. ¿Cuánto demora en recorrer 100 [m] ?
Solución
Aplicando 2ª Ley de Newton:
Aplicando fórmulas de cinemática:
2. Un cuerpo de 3 [kg] de masa describe un movimiento uniforme rectilíneocon rapidez 36 [m/s]. En cierto instante comienza a variar su velocidad deacuerdo con la expresión:
a. ¿Qué fuerza neta (magnitud y sentido) actúa sobre el cuerpo antes ydespués de variar su velocidad?b. ¿Cuánto tarda en detenerse el móvil?c. ¿Qué distancia recorre el móvil antes de detenerse?
Solución
a. Antes el cuerpo describía un MRUR
b. Como la fuerza se opone al movimiento del cuerpo, éste se detendrácuando v(t) = 0: reemplazando en la expresión dada
c. En cuanto a la distancia recorrida, mediante la ecuación itinerario delMRUA obtenemos la variación de posición del móvil.
• Tercera ley de Newton (principio de acción y reacción) : “Si sobre uncierto cuerpo se está ejerciendo una fuerza (FAB); entonces este cuerpo ejerceuna fuerza (FBA), de igual magnitud sobre el agente pero de sentido opuesto”.
- Las fuerzas FAB y FBA, llamadas de acción y reacción son simultáneas.
- Aunque ambas fuerzas son opuestas, no se anulan debido a que seejercen sobre cuerpos distintos.
- Principio de superposición de fuerzas
La fuerza resultante de varias fuerzas actuando sobre un cuerpo es lasuma vectorial de ellas.
2.2.1 Sistema de referencia
La elección del sistema de referencia presenta cierta libertad en cuanto a laorientación que se le dé al sistema, pero no en lo que se refiere a su movimiento.Si un sistema de referencia se encuentra fijo a la tierra, o a lo más desarrolla unMovimiento Uniformemente Rectilíneo (MRU) y, por lo tanto, desde el punto devista estrictamente vectorial, de velocidad constante con respecto a ella, tantolas fuerzas como las aceleraciones de los cuerpos no dependen del sistema dereferencia; sino que son absolutos.
Un sistema de referencia con estas características se denomina Sistema deReferencia Inercial. Las leyes de Newton solamente se cumplen en este tipo desistemas.
Ejemplo
• Sistemas inerciales: Persona quieta en la Tierra, tren en movimientouniforme rectilíneo.
• Sistemas no inerciales: Carro del metro partiendo o frenando, autodando una curva.
¿Qué mide la balanza?
En realidad, en los razonamientos anteriores mezclamos dos tipos de masapara el mismo cuerpo. Una, que deberíamos haber llamado masa inercial y querige en la segunda ley de Newton, y otra, que deberíamos haber llamado masagravitacional asociada al peso. Lo interesante (y esto se conoce también comoel Principio de Equivalencia) es que ambas masas coinciden con una precisiónasombrosa. La balanza determina la masa de un cuerpo, es decir, su cantidadde materia en comparación con otro elemento. Su inclinación, por lo tanto, nodepende del lugar donde se mida, ya sea en la Tierra, la Luna u otro planeta,porque, a diferencia del peso que corresponde a una fuerza, no depende delcampo gravitacional. Por ser una fuerza se mide con un dinamómetro.
2.3 Diagrama de cuerpo libre
El diagrama de cuerpo libre (DCL) corresponde a una herramienta en la quese analiza al cuerpo o partícula como elemento “dinámicamente aislado”.
Para esto se deben representar consecuentemente las fuerzas que actúansobre el cuerpo en la situación real. La metodología del DCL comprende lossiguientes pasos:
• Se plantea una hipótesis de movimiento.• El cuerpo que se analizará se representa por un punto aislado (conceptode partícula).• Las fuerzas que actúan sobre el cuerpo se representan vectorialmente enla partícula, manteniendo su dirección y sentido original.• Asignar ubicación de Sistema Cartesiano de Coordenadas másconveniente. Normalmente se sugiere, sólo por razones de sentido práctico,situarlo según el plano del movimiento o del posible movimiento. Porejemplo, en el caso de planos inclinados, paralelo a la superficie dedesplazamiento.• Aplicar Principio de Superposición de Fuerzas por eje segúndescomposición vectorial.
Pasos a seguir en la resolución de problemas de dinámica, utilizando DCL:
• Hipótesis de movimiento.• Dibujar todas las fuerzas (acción y Reacción).• DCL para cada cuerpo.
• Plantear ∑ = m Para cada eje se resuelven las ecuaciones seinterpretan sus resultados.
2.4 Fuerzas mecánicas
2.4.1 Peso ( )
a. Definición
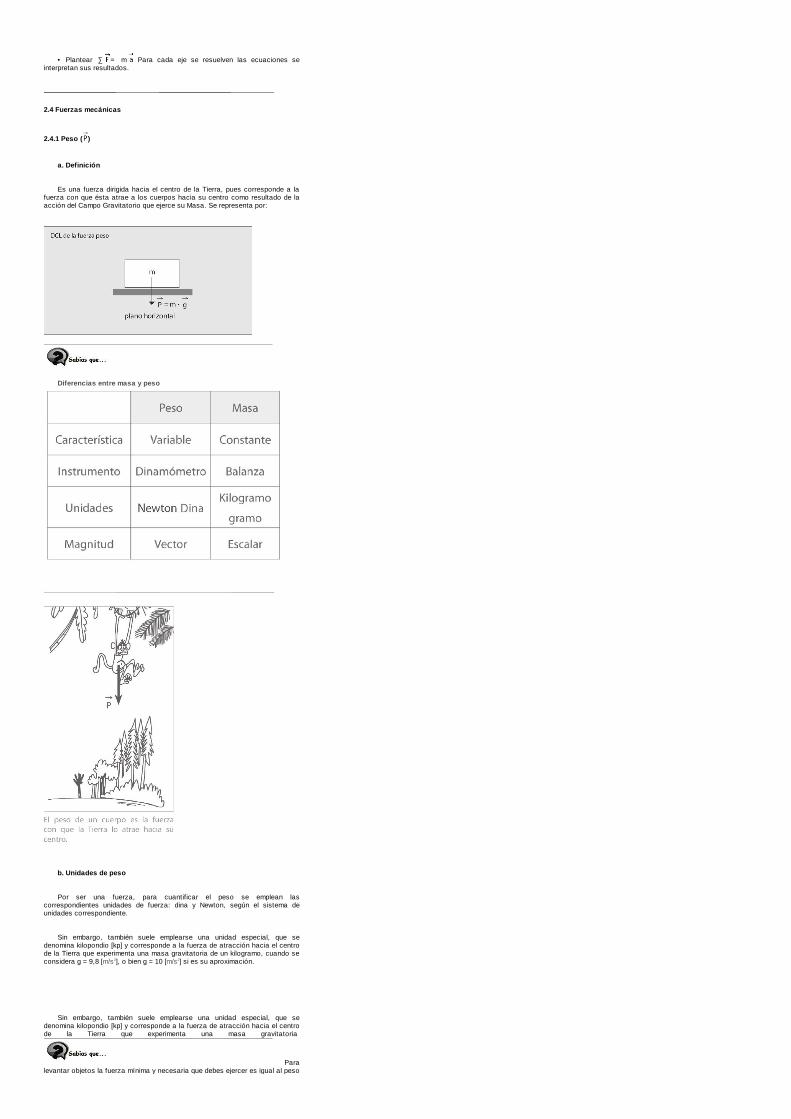
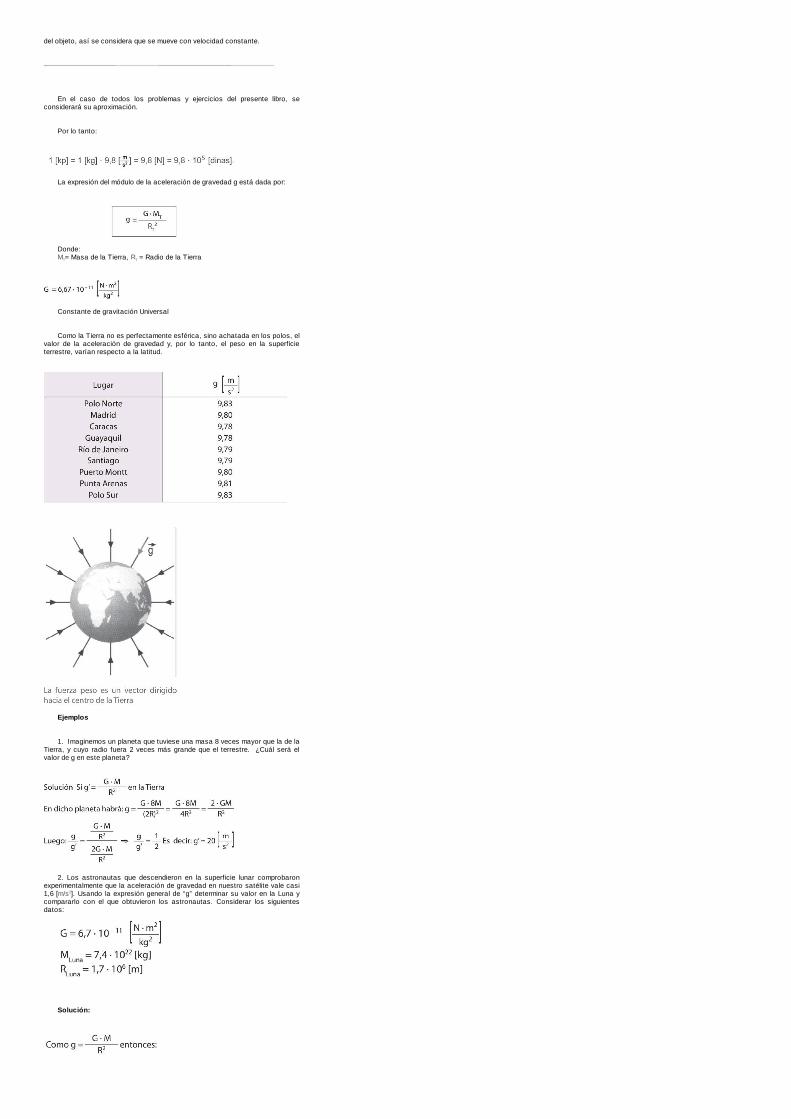
Es una fuerza dirigida hacia el centro de la Tierra, pues corresponde a lafuerza con que ésta atrae a los cuerpos hacia su centro como resultado de laacción del Campo Gravitatorio que ejerce su Masa. Se representa por:
Diferencias entre masa y peso
b. Unidades de peso
Por ser una fuerza, para cuantificar el peso se emplean lascorrespondientes unidades de fuerza: dina y Newton, según el sistema deunidades correspondiente.
Sin embargo, también suele emplearse una unidad especial, que sedenomina kilopondio [kp] y corresponde a la fuerza de atracción hacia el centrode la Tierra que experimenta una masa gravitatoria de un kilogramo, cuando seconsidera g = 9,8 [m/s2], o bien g = 10 [m/s2] si es su aproximación.
Sin embargo, también suele emplearse una unidad especial, que sedenomina kilopondio [kp] y corresponde a la fuerza de atracción hacia el centrode la Tierra que experimenta una masa gravitatoria
Paralevantar objetos la fuerza mínima y necesaria que debes ejercer es igual al peso
del objeto, así se considera que se mueve con velocidad constante.
En el caso de todos los problemas y ejercicios del presente libro, seconsiderará su aproximación.
Por lo tanto:
La expresión del módulo de la aceleración de gravedad g está dada por:
Donde:MT= Masa de la Tierra, RT = Radio de la Tierra
Constante de gravitación Universal
Como la Tierra no es perfectamente esférica, sino achatada en los polos, elvalor de la aceleración de gravedad y, por lo tanto, el peso en la superficieterrestre, varían respecto a la latitud.
Ejemplos
1. Imaginemos un planeta que tuviese una masa 8 veces mayor que la de laTierra, y cuyo radio fuera 2 veces más grande que el terrestre. ¿Cuál será elvalor de g en este planeta?
2. Los astronautas que descendieron en la superficie lunar comprobaronexperimentalmente que la aceleración de gravedad en nuestro satélite vale casi1,6 [m/s2]. Usando la expresión general de “g” determinar su valor en la Luna ycompararlo con el que obtuvieron los astronautas. Considerar los siguientesdatos:
Solución:
Este resultado es equivalente a decir que “g” de la Luna es 1/6 de “g”terrestre. Es decir, si una persona tiene una masa de 60 [kg] en la Tierra, supeso será de 600 [N]. Ahora, en la Luna su masa sigue siendo 60 [kg], pero supeso ha decrecido a 100 [N].
3. La masa de Júpiter es casi 300 veces mayor que la de la Tierra y suradio es casi diez veces mayor. ¿Cuál es el valor aproximado de g en Júpiter?
Solución
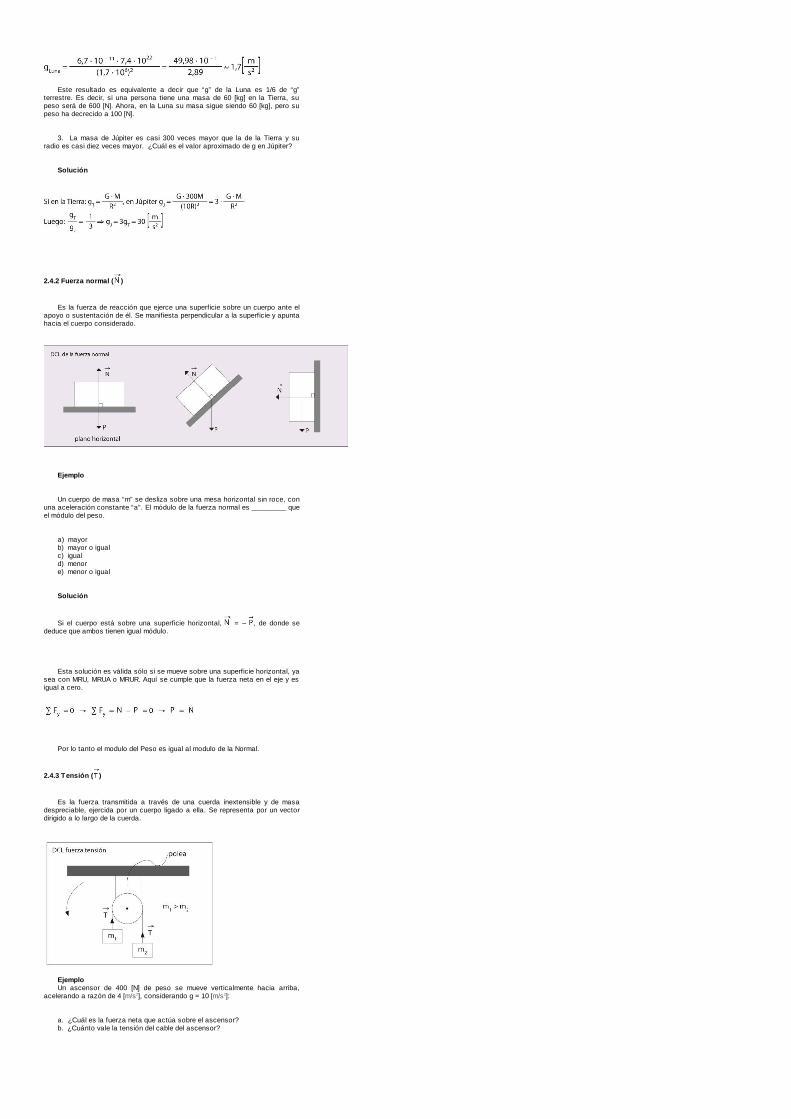
2.4.2 Fuerza normal ( )
Es la fuerza de reacción que ejerce una superficie sobre un cuerpo ante elapoyo o sustentación de él. Se manifiesta perpendicular a la superficie y apuntahacia el cuerpo considerado.
Ejemplo
Un cuerpo de masa “m” se desliza sobre una mesa horizontal sin roce, conuna aceleración constante “a”. El módulo de la fuerza normal es _________ queel módulo del peso.
a) mayorb) mayor o igualc) iguald) menore) menor o igual
Solución
Si el cuerpo está sobre una superficie horizontal, = – , de donde sededuce que ambos tienen igual módulo.
Esta solución es válida sólo si se mueve sobre una superficie horizontal, yasea con MRU, MRUA o MRUR. Aquí se cumple que la fuerza neta en el eje y esigual a cero.
Por lo tanto el modulo del Peso es igual al modulo de la Normal.
2.4.3 Tensión ( )
Es la fuerza transmitida a través de una cuerda inextensible y de masadespreciable, ejercida por un cuerpo ligado a ella. Se representa por un vectordirigido a lo largo de la cuerda.
EjemploUn ascensor de 400 [N] de peso se mueve verticalmente hacia arriba,
acelerando a razón de 4 [m/s2], considerando g = 10 [m/s2]:
a. ¿Cuál es la fuerza neta que actúa sobre el ascensor?b. ¿Cuánto vale la tensión del cable del ascensor?
Solución
Mediante DCL y de acuerdo con el sistema de referencia asignado, alaplicar la segunda Ley de Newton se tiene :
Aplicando principio de superposición de fuerzas verticales para obtener latensión T:
Evaluando: T – P = m · ay
T = m · ay + P
T = 160 [N] + 400 [N] T = 560 [N]
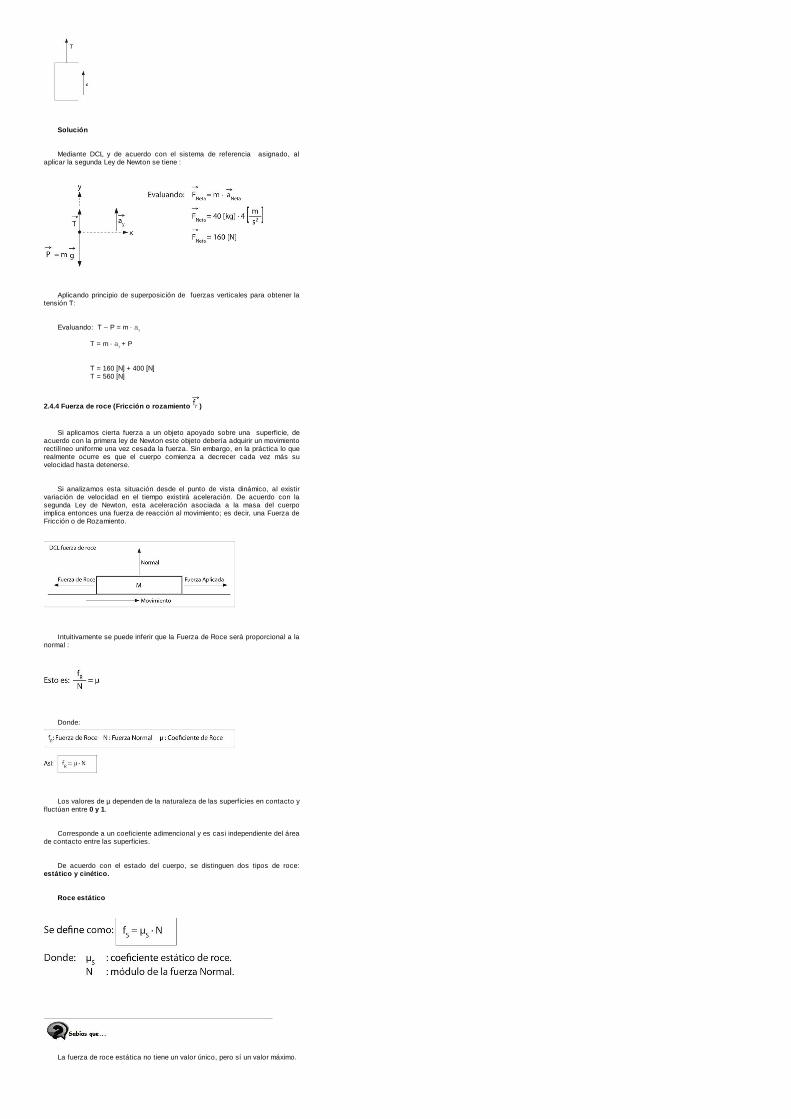
2.4.4 Fuerza de roce (Fricción o rozamiento )
Si aplicamos cierta fuerza a un objeto apoyado sobre una superficie, deacuerdo con la primera ley de Newton este objeto debería adquirir un movimientorectilíneo uniforme una vez cesada la fuerza. Sin embargo, en la práctica lo querealmente ocurre es que el cuerpo comienza a decrecer cada vez más suvelocidad hasta detenerse.
Si analizamos esta situación desde el punto de vista dinámico, al existirvariación de velocidad en el tiempo existirá aceleración. De acuerdo con lasegunda Ley de Newton, esta aceleración asociada a la masa del cuerpoimplica entonces una fuerza de reacción al movimiento; es decir, una Fuerza deFricción o de Rozamiento.
Intuitivamente se puede inferir que la Fuerza de Roce será proporcional a lanormal :
Donde:
Los valores de µ dependen de la naturaleza de las superficies en contacto yfluctúan entre 0 y 1.
Corresponde a un coeficiente adimencional y es casi independiente del áreade contacto entre las superficies.
De acuerdo con el estado del cuerpo, se distinguen dos tipos de roce:estático y cinético.
Roce estático
La fuerza de roce estática no tiene un valor único, pero sí un valor máximo.
μs y μK, son coeficientes adimensionales.
• Ventajas del roce:- Frenos de vehículos.- Pulir objetos (fabricación de lentes).
• Desventajas del roce:- Desgaste de neumáticos.- Desgaste de ropa y zapatos.
La fuerza de fricción corresponde a la oposición que presenta el medio aldesplazamiento, o al posible desplazamiento, de un cuerpo a través de éldebido a la irregularidad de las superficies en contacto (interacción entresuperficies rugosas).
En la práctica, la mayoría de las superficies, aun las que se consideranpulidas, son extremadamente rugosas a escala microscópica; elementos de tipolubricante tienden a disminuir esta rugosidad, pero no la eliminan.
Ahora bien, si deseáramos mantener el cuerpo en movimiento con velocidadconstante, sería necesario aplicar una fuerza F constante. Por superposiciónde fuerzas, esto implica que habrá también una fuerza constante que se opongaa la fuerza F de modo tal que la aceleración neta sea cero. Esta fuerzacorresponde a la Fuerza de Roce Cinético, dada por:
Donde: μK: coeficiente cinético de roce. N: módulo de la fuerza Normal.
Por lo general, a igualdad de condiciones, la fuerza máxima de roceestático, fS, es mayor que la fuerza de roce cinético, fK.
Esto es: fS > fK ya que µS > µK
Fuente: Giancoli, Douglas C.; Física, Principios con aplicaciones, México,Prentice Hall, 1997, 4ª Edición.
Ejemplos
1. Una caja de 20 [kg] descansa sobre una mesa horizontal. Determinar lafuerza mínima que es preciso ejercer para ponerla en movimiento, si se sabe queel coeficiente de roce entre las superficies es 0,4.
Solución
La fuerza mínima será la fuerza de roce. En este caso, la fuerza normal esigual al peso del cuerpo:
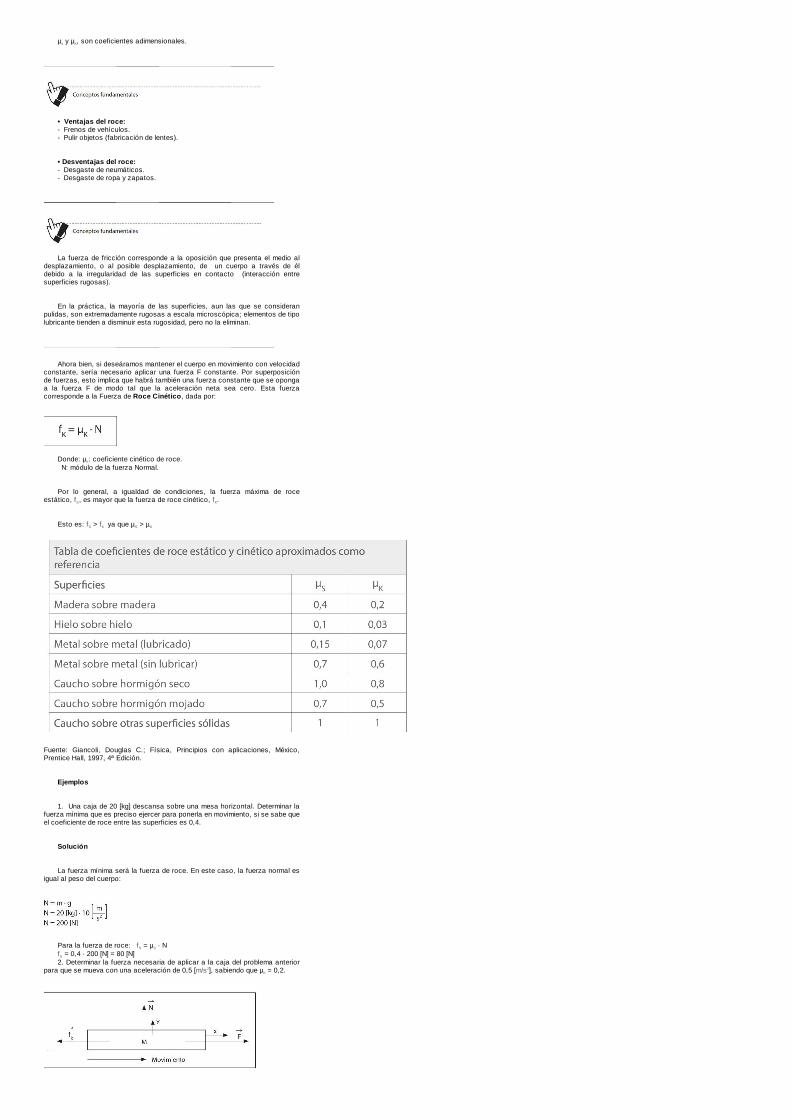
Para la fuerza de roce: fS = μS · NfS = 0,4 · 200 [N] = 80 [N]2. Determinar la fuerza necesaria de aplicar a la caja del problema anterior
para que se mueva con una aceleración de 0,5 [m/s2], sabiendo que μK = 0,2.
Solución De acuerdo con el diagrama, al equilibrar fuerzas en el eje x,según el sistema de referencia asignado:
2.4.5 Fuerza elástica ( )
a. Definición
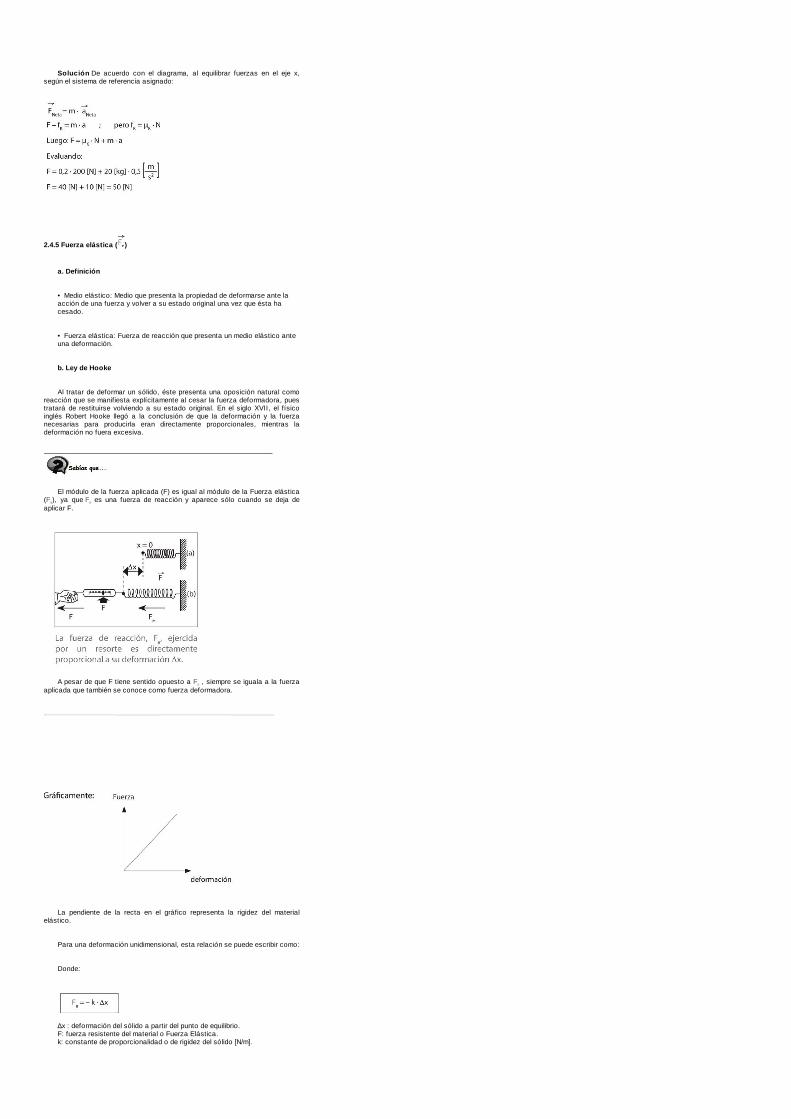
• Medio elástico: Medio que presenta la propiedad de deformarse ante laacción de una fuerza y volver a su estado original una vez que ésta hacesado.
• Fuerza elástica: Fuerza de reacción que presenta un medio elástico anteuna deformación.
b. Ley de Hooke
Al tratar de deformar un sólido, éste presenta una oposición natural comoreacción que se manifiesta explícitamente al cesar la fuerza deformadora, puestratará de restituirse volviendo a su estado original. En el siglo XVII, el físicoinglés Robert Hooke llegó a la conclusión de que la deformación y la fuerzanecesarias para producirla eran directamente proporcionales, mientras ladeformación no fuera excesiva.
El módulo de la fuerza aplicada (F) es igual al módulo de la Fuerza elástica(Fe), ya que Fe es una fuerza de reacción y aparece sólo cuando se deja deaplicar F.
A pesar de que F tiene sentido opuesto a Fe , siempre se iguala a la fuerzaaplicada que también se conoce como fuerza deformadora.
La pendiente de la recta en el gráfico representa la rigidez del materialelástico.
Para una deformación unidimensional, esta relación se puede escribir como:
Donde:
∆x : deformación del sólido a partir del punto de equilibrio.F: fuerza resistente del material o Fuerza Elástica.k: constante de proporcionalidad o de rigidez del sólido [N/m].

El signo “-” en la ley de Hooke significa que la fuerza es contraria a la
deformación y corresponde, por lo tanto, a una fuerza de reacción ante lafuerza deformadora.
Ejemplo
1. En un resorte de constante k = 350 [N/m] se cuelga una masa de 20 [kg],como muestra la figura. Calcular el estiramiento ∆x del resorte desde suposición inicial de equilibrio (A) hasta su nueva posición de equilibrio (B).
Solución: Equilibrando fuerzas en el centro de masa del cuerpo se tieneque:
2. En la siguiente figura, calcular la tensión de la cuerda y la aceleracióndel sistema sabiendo que m1 = 4 [kg] y m2 = 2 [kg].

Solución
Combinando ambas ecuaciones se obtiene:
3. Sean dos cuerpos m1 = 3 [kg] y m2 = 5 [kg] que se deslizan sobre unasuperficie lisa (µ = 0) . Al sistema se le aplica una fuerza de 100 [N]. Calcular:
a. aceleración del sistema.b. la fuerza que ejerce m2 sobre m1
Solución
De acuerdo con la tercera Ley de Newton, se tiene:
DCL para m1
Eje x: F – F* = m1 a (1)
DCL para m2
Eje x: F* = m2 a (2)
Combinando ambas ecuaciones se obtiene:
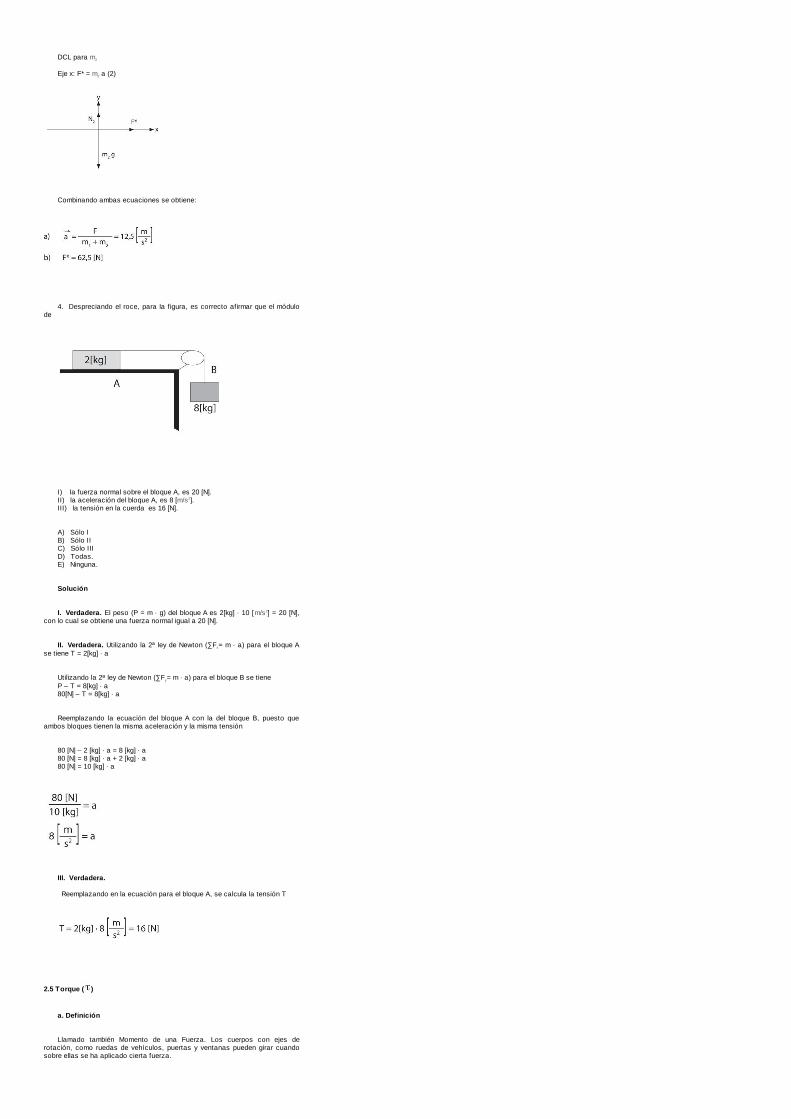
4. Despreciando el roce, para la figura, es correcto afirmar que el módulode
I) la fuerza normal sobre el bloque A, es 20 [N].II) la aceleración del bloque A, es 8 [m/s2].III) la tensión en la cuerda es 16 [N].
A) Sólo IB) Sólo IIC) Sólo IIID) Todas.E) Ninguna.
Solución
I. Verdadera. El peso (P = m · g) del bloque A es 2[kg] · 10 [m/s2] = 20 [N],con lo cual se obtiene una fuerza normal igual a 20 [N].
II. Verdadera. Utilizando la 2ª ley de Newton (∑Fx= m · a) para el bloque Ase tiene T = 2[kg] · a
Utilizando la 2ª ley de Newton (∑Fy= m · a) para el bloque B se tieneP – T = 8[kg] · a80[N] – T = 8[kg] · a
Reemplazando la ecuación del bloque A con la del bloque B, puesto queambos bloques tienen la misma aceleración y la misma tensión
80 [N] – 2 [kg] · a = 8 [kg] · a80 [N] = 8 [kg] · a + 2 [kg] · a80 [N] = 10 [kg] · a
III. Verdadera.
Reemplazando en la ecuación para el bloque A, se calcula la tensión T
2.5 Torque ( )
a. Definición
Llamado también Momento de una Fuerza. Los cuerpos con ejes derotación, como ruedas de vehículos, puertas y ventanas pueden girar cuandosobre ellas se ha aplicado cierta fuerza.
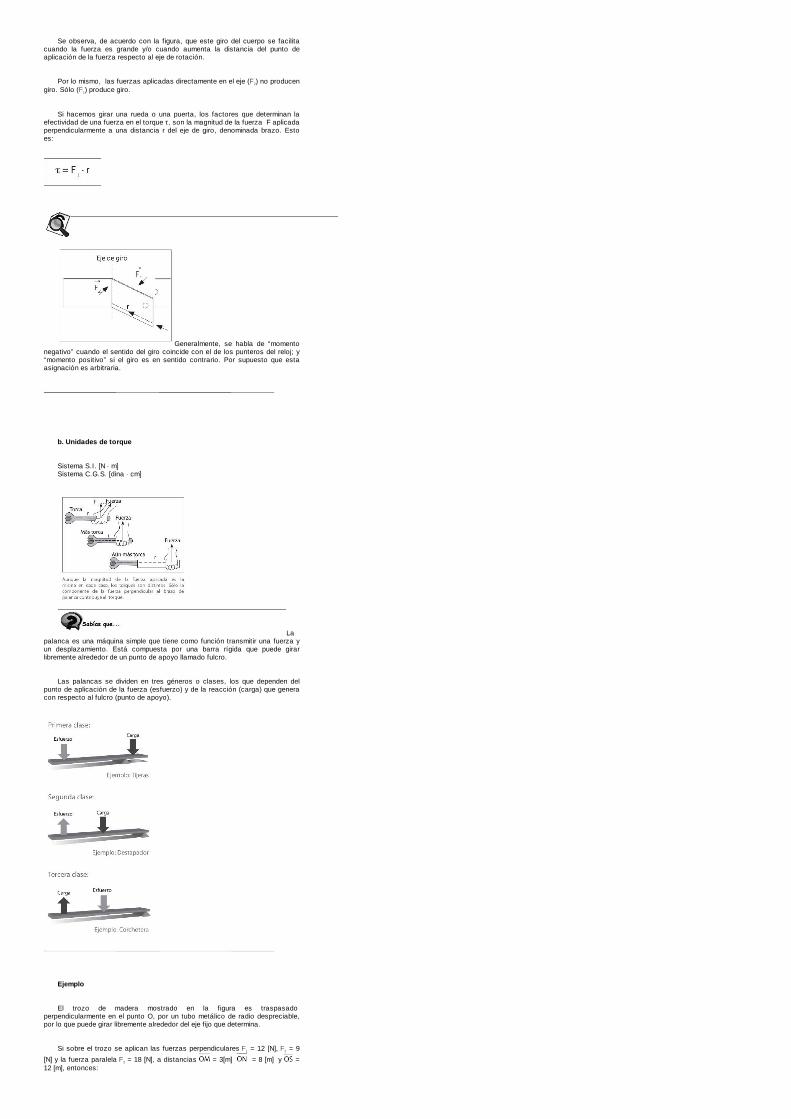
Se observa, de acuerdo con la figura, que este giro del cuerpo se facilitacuando la fuerza es grande y/o cuando aumenta la distancia del punto deaplicación de la fuerza respecto al eje de rotación.
Por lo mismo, las fuerzas aplicadas directamente en el eje (F2) no producengiro. Sólo (F1) produce giro.
Si hacemos girar una rueda o una puerta, los factores que determinan laefectividad de una fuerza en el torque τ, son la magnitud de la fuerza F aplicadaperpendicularmente a una distancia r del eje de giro, denominada brazo. Estoes:
Generalmente, se habla de “momentonegativo” cuando el sentido del giro coincide con el de los punteros del reloj; y“momento positivo” si el giro es en sentido contrario. Por supuesto que estaasignación es arbitraria.
b. Unidades de torque
Sistema S.I. [N · m]Sistema C.G.S. [dina · cm]
Lapalanca es una máquina simple que tiene como función transmitir una fuerza yun desplazamiento. Está compuesta por una barra rígida que puede girarlibremente alrededor de un punto de apoyo llamado fulcro.
Las palancas se dividen en tres géneros o clases, los que dependen delpunto de aplicación de la fuerza (esfuerzo) y de la reacción (carga) que generacon respecto al fulcro (punto de apoyo).
Ejemplo
El trozo de madera mostrado en la figura es traspasado perpendicularmente en el punto O, por un tubo metálico de radio despreciable,por lo que puede girar libremente alrededor del eje fijo que determina.
Si sobre el trozo se aplican las fuerzas perpendiculares F1 = 12 [N], F2 = 9
[N] y la fuerza paralela F3 = 18 [N], a distancias = 3[m] = 8 [m] y =12 [m], entonces:
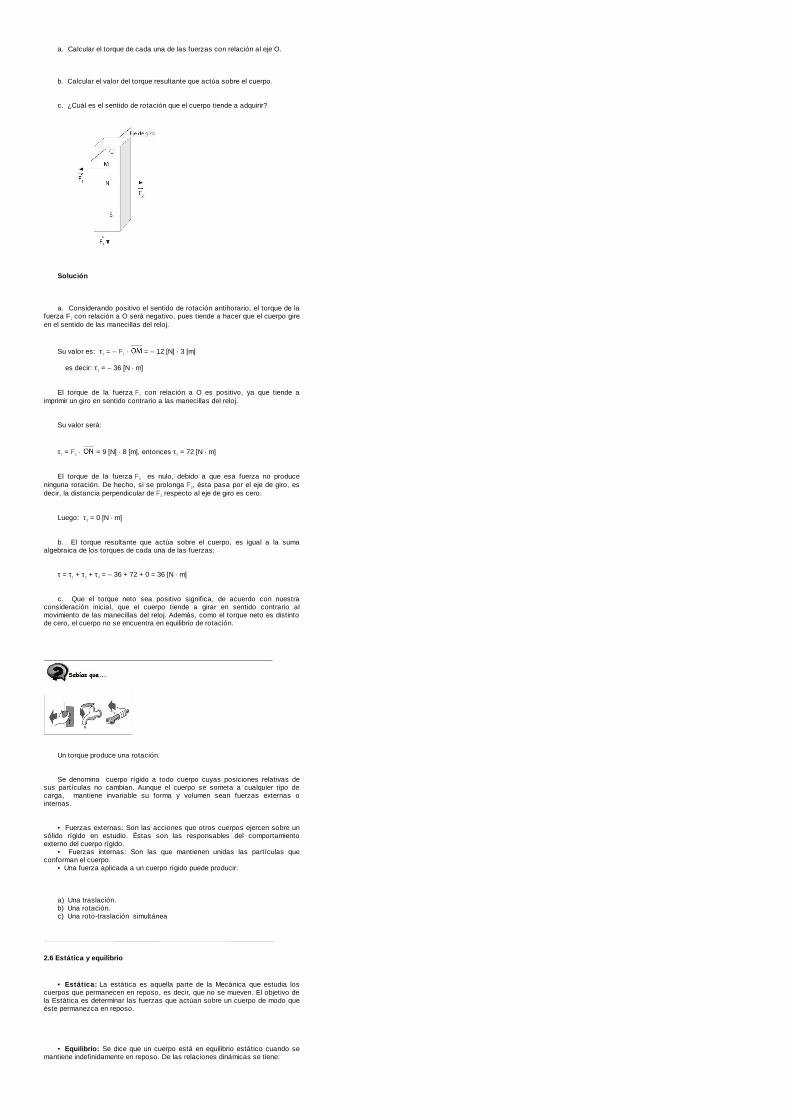
a. Calcular el torque de cada una de las fuerzas con relación al eje O.
b. Calcular el valor del torque resultante que actúa sobre el cuerpo.
c. ¿Cuál es el sentido de rotación que el cuerpo tiende a adquirir?
Solución
a. Considerando positivo el sentido de rotación antihorario, el torque de lafuerza F1 con relación a O será negativo, pues tiende a hacer que el cuerpo gireen el sentido de las manecillas del reloj.
Su valor es: τ1 = – F1 · = – 12 [N] · 3 [m] es decir: τ1 = – 36 [N · m]
El torque de la fuerza F2 con relación a O es positivo, ya que tiende aimprimir un giro en sentido contrario a las manecillas del reloj.
Su valor será:
τ2 = F2 · = 9 [N] · 8 [m], entonces τ2 = 72 [N · m]
El torque de la fuerza F3 es nulo, debido a que esa fuerza no produceninguna rotación. De hecho, si se prolonga F3, ésta pasa por el eje de giro, esdecir, la distancia perpendicular de F3 respecto al eje de giro es cero.
Luego: τ3 = 0 [N · m]
b. El torque resultante que actúa sobre el cuerpo, es igual a la sumaalgebraica de los torques de cada una de las fuerzas:
τ = τ1 + τ2 + τ3 = – 36 + 72 + 0 = 36 [N · m]
c. Que el torque neto sea positivo significa, de acuerdo con nuestraconsideración inicial, que el cuerpo tiende a girar en sentido contrario almovimiento de las manecillas del reloj. Además, como el torque neto es distintode cero, el cuerpo no se encuentra en equilibrio de rotación.
Un torque produce una rotación.
Se denomina cuerpo rígido a todo cuerpo cuyas posiciones relativas desus partículas no cambian. Aunque el cuerpo se someta a cualquier tipo decarga, mantiene invariable su forma y volumen sean fuerzas externas ointernas.
• Fuerzas externas: Son las acciones que otros cuerpos ejercen sobre unsólido rígido en estudio. Éstas son las responsables del comportamientoexterno del cuerpo rígido.
• Fuerzas internas: Son las que mantienen unidas las partículas queconforman el cuerpo.
• Una fuerza aplicada a un cuerpo rígido puede producir:
a) Una traslación.b) Una rotación.c) Una roto-traslación simultánea
2.6 Estática y equilibrio
• Estática: La estática es aquella parte de la Mecánica que estudia loscuerpos que permanecen en reposo, es decir, que no se mueven. El objetivo dela Estática es determinar las fuerzas que actúan sobre un cuerpo de modo queéste permanezca en reposo.
• Equilibrio: Se dice que un cuerpo está en equilibrio estático cuando semantiene indefinidamente en reposo. De las relaciones dinámicas se tiene:
Para que la partícula se encuentre en equilibrio estático su aceleración netadebe ser nula (equilibrio traslacional). Además de esto, también se debeconsiderar el hecho de que el cuerpo no pueda rotar, lo que significa que sutorque neto sea cero (equilibrio rotacional). Es decir, en equilibrio estático, secumple que:
Ejemplo
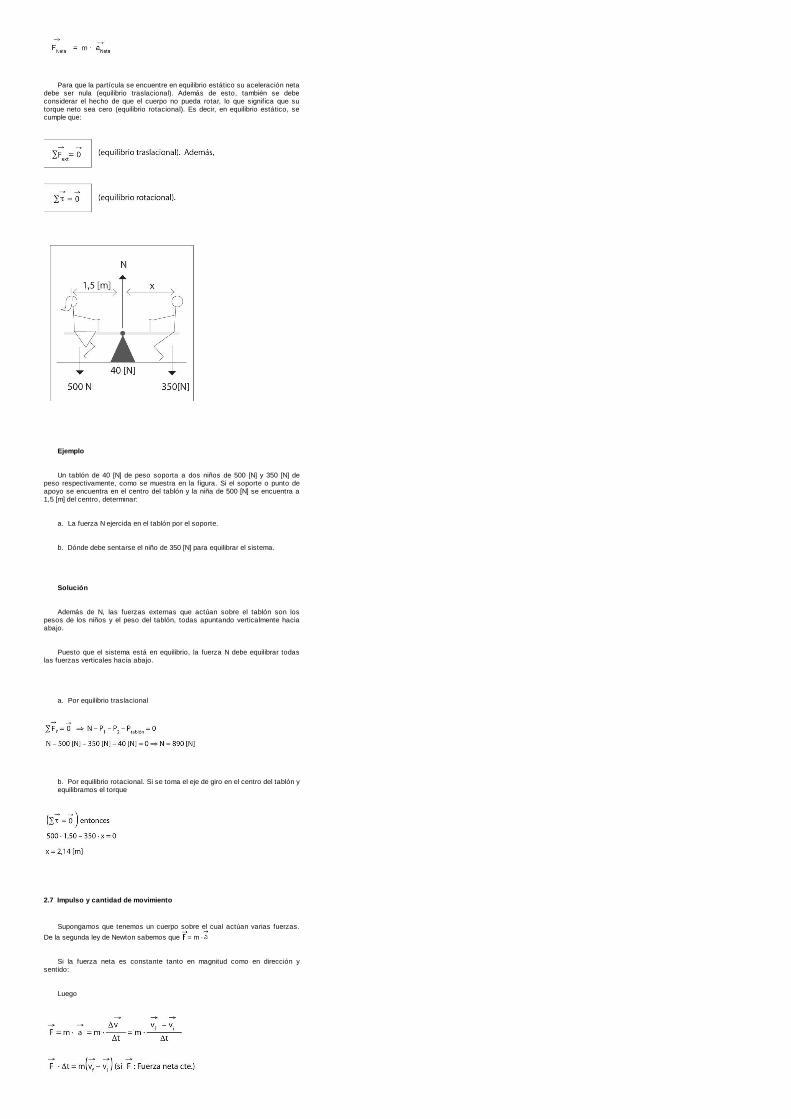
Un tablón de 40 [N] de peso soporta a dos niños de 500 [N] y 350 [N] depeso respectivamente, como se muestra en la figura. Si el soporte o punto deapoyo se encuentra en el centro del tablón y la niña de 500 [N] se encuentra a1,5 [m] del centro, determinar:
a. La fuerza N ejercida en el tablón por el soporte.
b. Dónde debe sentarse el niño de 350 [N] para equilibrar el sistema.
Solución
Además de N, las fuerzas externas que actúan sobre el tablón son lospesos de los niños y el peso del tablón, todas apuntando verticalmente haciaabajo.
Puesto que el sistema está en equilibrio, la fuerza N debe equilibrar todaslas fuerzas verticales hacia abajo.
a. Por equilibrio traslacional
b. Por equilibrio rotacional. Si se toma el eje de giro en el centro del tablón yequilibramos el torque
2.7 Impulso y cantidad de movimiento
Supongamos que tenemos un cuerpo sobre el cual actúan varias fuerzas.
De la segunda ley de Newton sabemos que = m ·
Si la fuerza neta es constante tanto en magnitud como en dirección y
sentido:
Luego
La primera expresión de la igualdad anterior se llama Impulso ycorresponde a un vector que se obtiene de multiplicar una fuerza por el intervalode tiempo en que actúa sobre un cuerpo.
La segunda expresión de la igualdad (1) representa la variación de lacantidad de movimiento y corresponde a un vector que se obtiene almultiplicar la masa de un cuerpo por la variación de su velocidad.
De las ecuaciones (2) y (3) se deduce: · Δt = Δ
Es decir, el impulso de una fuerza en un intervalo de tiempo Δt es igual ala variación de cantidad de movimiento lineal que ésta produce en el cuerpo.Usando las definiciones (2) y (3) y en el supuesto de que la fuerza neta queactúa sea constante, podemos escribir la relación (1) como:
Unidades Impulso
S.I. : [N · s]C.G.S. : [dina · s]
Dimensionalmente
Impulso = fuerza · tiempo= m · a · Δt= [MLT -1]
L a cantidad de movimiento lineal de un cuerpo o momentum linealcorresponde a la relación entre su masa y su velocidad.
= m ·
Sus unidades son:
Dimensionalmente
momentum = masa · velocidad lineal= m · v= [MLT -1]
1. Una persona aplica una fuerza de 30 [N] sobre un auto que estaba enreposo, por un tiempo de 20 [s]. Determinar la velocidad final del automóvil,luego de los 20 [s], si la masa del auto es de 400 [kg].
Solución
Usando
2. Un vehículo de 100 [kg] se desplaza a 50 [km/h]. ¿Cuál es la fuerzarequerida para que su velocidad sea de 70 [km/h] transcurridos 10 [s] desde suaplicación?
Solución
2.7.1 El Momentum y su conservación
• Para el caso de fuerzas que actúan sobre un solo cuerpo, sabemosque:
Por otro lado
Ahora bien, si sobre este cuerpo la fuerza neta resulta ser nula:
Esto significa que si sobre un cuerpo la fuerza neta ejercida es nula, estecuerpo conservará su cantidad de movimiento lineal. Esta expresión se conocec o mo principio de conservación de la cantidad de movimiento lineal(momentum lineal) de un cuerpo. Sin embargo, este resultado no es novedoso.En efecto, utilizando la definición (si m = cte.)
Esta expresión no es más que otra forma de enunciar el principio de Inerciade Galileo (Primera Ley de Newton).
Se habla de sistema de partículas cuando la situación analizada implica avarios (dos o más) cuerpos interactuando entre sí. Corresponde a un conjuntocerrado de cuerpos en el sentido de que, a medida que los hechos ocurren, loselementos del sistema considerados originalmente (cuerpos o partículas) sonlos mismos.
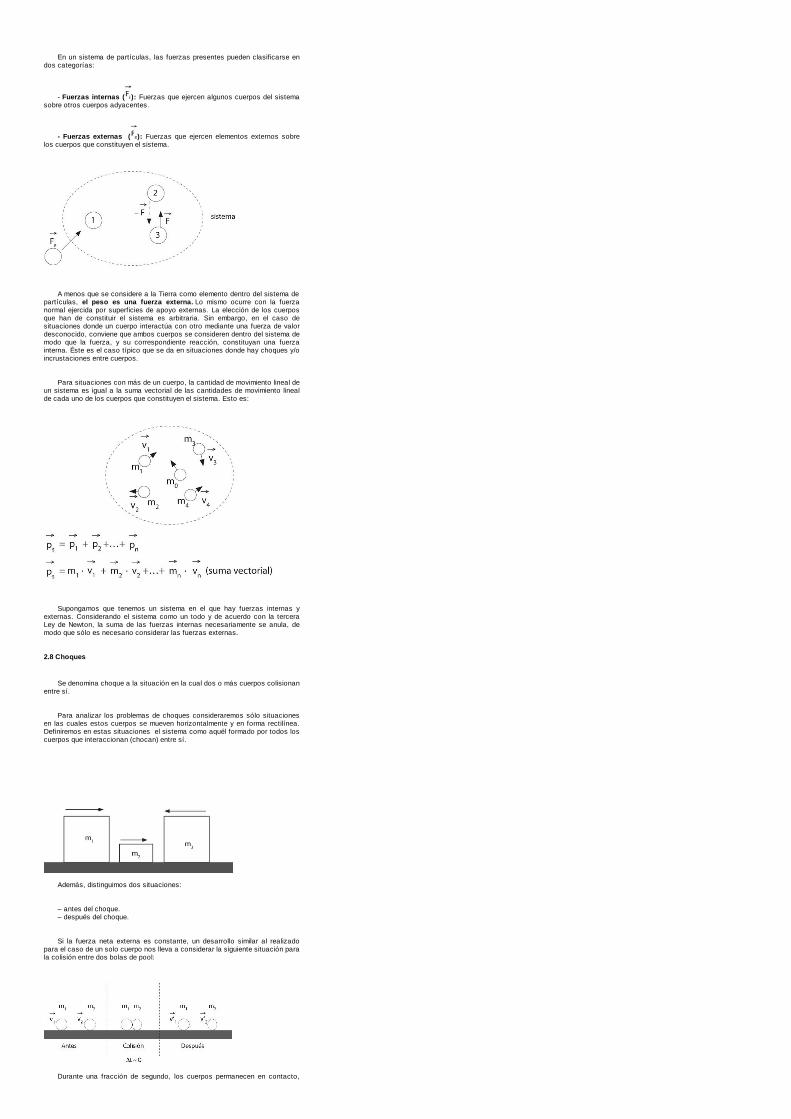
En un sistema de partículas, las fuerzas presentes pueden clasificarse endos categorías:
- Fuerzas internas ( ): Fuerzas que ejercen algunos cuerpos del sistemasobre otros cuerpos adyacentes.
- Fuerzas externas ( ): Fuerzas que ejercen elementos externos sobrelos cuerpos que constituyen el sistema.
A menos que se considere a la Tierra como elemento dentro del sistema departículas, el peso es una fuerza externa. Lo mismo ocurre con la fuerzanormal ejercida por superficies de apoyo externas. La elección de los cuerposque han de constituir el sistema es arbitraria. Sin embargo, en el caso desituaciones donde un cuerpo interactúa con otro mediante una fuerza de valordesconocido, conviene que ambos cuerpos se consideren dentro del sistema demodo que la fuerza, y su correspondiente reacción, constituyan una fuerzainterna. Éste es el caso típico que se da en situaciones donde hay choques y/oincrustaciones entre cuerpos.
Para situaciones con más de un cuerpo, la cantidad de movimiento lineal deun sistema es igual a la suma vectorial de las cantidades de movimiento linealde cada uno de los cuerpos que constituyen el sistema. Esto es:
Supongamos que tenemos un sistema en el que hay fuerzas internas yexternas. Considerando el sistema como un todo y de acuerdo con la terceraLey de Newton, la suma de las fuerzas internas necesariamente se anula, demodo que sólo es necesario considerar las fuerzas externas.
2.8 Choques
Se denomina choque a la situación en la cual dos o más cuerpos colisionanentre sí.
Para analizar los problemas de choques consideraremos sólo situacionesen las cuales estos cuerpos se mueven horizontalmente y en forma rectilínea.Definiremos en estas situaciones el sistema como aquél formado por todos loscuerpos que interaccionan (chocan) entre sí.
Además, distinguimos dos situaciones:
– antes del choque.– después del choque.
Si la fuerza neta externa es constante, un desarrollo similar al realizadopara el caso de un solo cuerpo nos lleva a considerar la siguiente situación parala colisión entre dos bolas de pool:
Durante una fracción de segundo, los cuerpos permanecen en contacto,
deformándose.
Esta deformación es instantánea, pues los cuerpos tratan de recuperarinmediatamente su forma esférica original. En esta interacción se cumple latercera Ley de Newton.
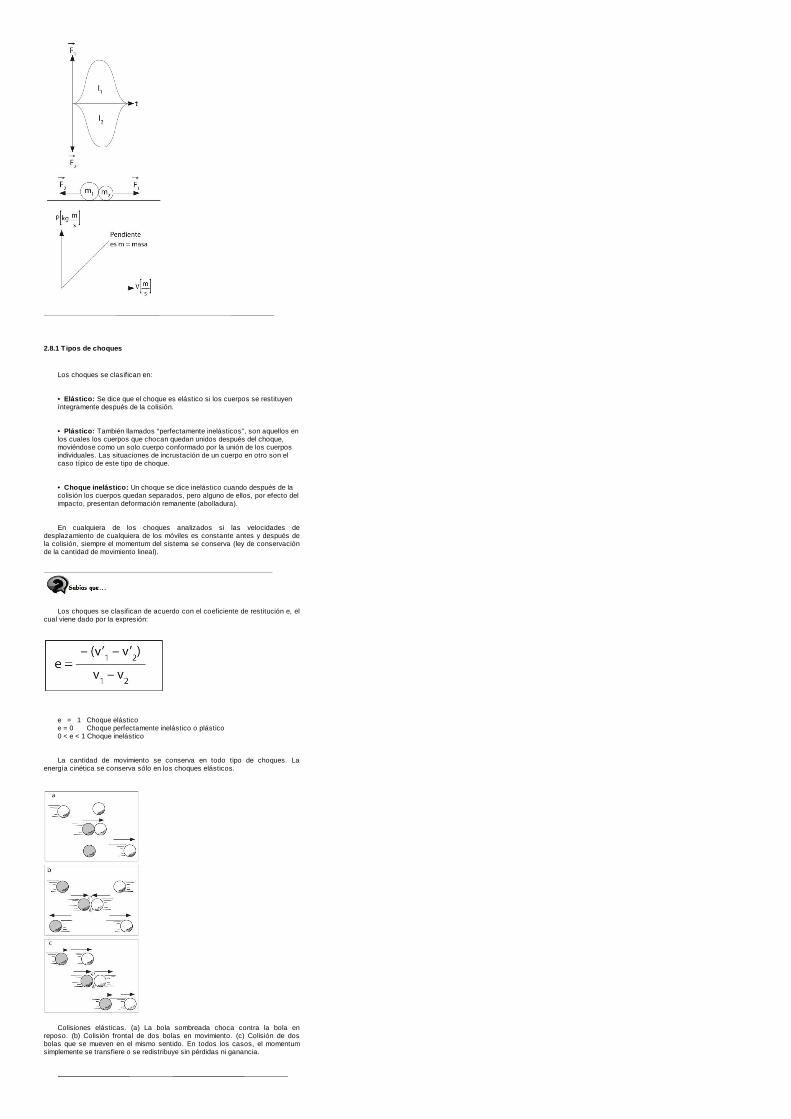
Si actúa sobre m2y actúa sobre m1 y el tiempo de la interacción es Δt,entonces se cumple:
En toda colisión los impulsos que se ejercen entre los cuerpos son igualesen módulo y dirección, pero de sentido opuesto. Estos impulsos actúan uno encada cuerpo.
De lo anterior se deduce que cada bola experimentará una variación en sucantidad de movimiento de igual magnitud y dirección, pero de sentido contrario.
En esta expresión, el primer término de la igualdad es la cantidad demovimiento del sistema antes del choque; y el segundo término es la cantidad demovimiento del sistema después del choque.
Esto ocurre cuando el sistema se considera aislado; es decir, no hayninguna fuerza externa que impulse al sistema.
En ambos casos, el impulso que aporta la quijada del boxeador al sistema reduce el momentum del golpe:
Cuando el boxeador se deja ir hacia atrás (se deja llevar por el golpe), elingrediente más importante del impulso es el tiempo (Izquierda).
Cuando el boxeador avanza hacia el guante, el tiempo se reduce y elingrediente más importante del impulso es la fuerza (Derecha).
Estas fuerzas crecen de un valor cero, antes de la interacción. Luego alcanzan un valor máximo e irregularmente decrecen de nuevo hasta cero.
2.8.1 T ipos de choques
Los choques se clasifican en:
• Elástico: Se dice que el choque es elástico si los cuerpos se restituyeníntegramente después de la colisión.
• Plástico: También llamados “perfectamente inelásticos”, son aquellos enlos cuales los cuerpos que chocan quedan unidos después del choque,moviéndose como un solo cuerpo conformado por la unión de los cuerposindividuales. Las situaciones de incrustación de un cuerpo en otro son elcaso típico de este tipo de choque.
• Choque inelástico: Un choque se dice inelástico cuando después de lacolisión los cuerpos quedan separados, pero alguno de ellos, por efecto delimpacto, presentan deformación remanente (abolladura).
En cualquiera de los choques analizados si las velocidades dedesplazamiento de cualquiera de los móviles es constante antes y después dela colisión, siempre el momentum del sistema se conserva (ley de conservaciónde la cantidad de movimiento lineal).
Los choques se clasifican de acuerdo con el coeficiente de restitución e, elcual viene dado por la expresión:
e = 1 Choque elásticoe = 0 Choque perfectamente inelástico o plástico0 < e < 1 Choque inelástico
La cantidad de movimiento se conserva en todo tipo de choques. Laenergía cinética se conserva sólo en los choques elásticos.
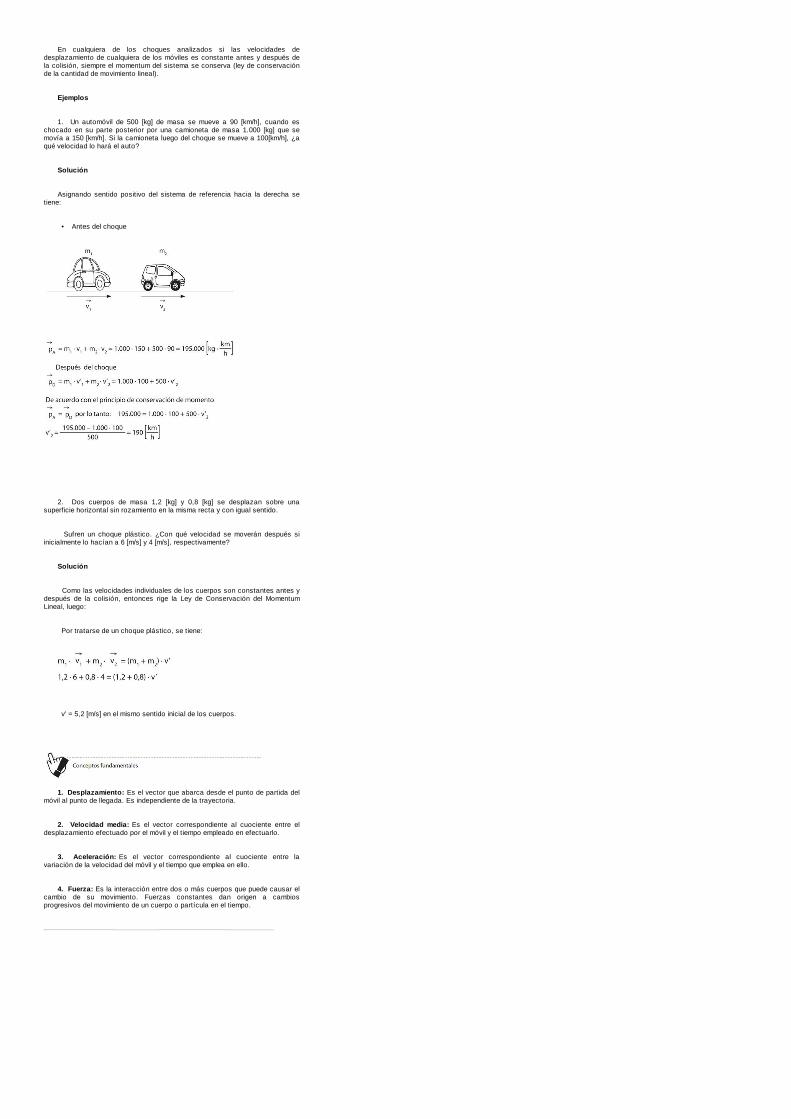
Colisiones elásticas. (a) La bola sombreada choca contra la bola enreposo. (b) Colisión frontal de dos bolas en movimiento. (c) Colisión de dosbolas que se mueven en el mismo sentido. En todos los casos, el momentumsimplemente se transfiere o se redistribuye sin pérdidas ni ganancia.
En cualquiera de los choques analizados si las velocidades dedesplazamiento de cualquiera de los móviles es constante antes y después dela colisión, siempre el momentum del sistema se conserva (ley de conservaciónde la cantidad de movimiento lineal).
Ejemplos
1. Un automóvil de 500 [kg] de masa se mueve a 90 [km/h], cuando eschocado en su parte posterior por una camioneta de masa 1.000 [kg] que semovía a 150 [km/h]. Si la camioneta luego del choque se mueve a 100[km/h], ¿aqué velocidad lo hará el auto?
Solución
Asignando sentido positivo del sistema de referencia hacia la derecha setiene:
• Antes del choque
2. Dos cuerpos de masa 1,2 [kg] y 0,8 [kg] se desplazan sobre unasuperficie horizontal sin rozamiento en la misma recta y con igual sentido.
Sufren un choque plástico. ¿Con qué velocidad se moverán después siinicialmente lo hacían a 6 [m/s] y 4 [m/s], respectivamente?
Solución
Como las velocidades individuales de los cuerpos son constantes antes ydespués de la colisión, entonces rige la Ley de Conservación del MomentumLineal, luego:
Por tratarse de un choque plástico, se tiene:
v’ = 5,2 [m/s] en el mismo sentido inicial de los cuerpos.
1. Desplazamiento: Es el vector que abarca desde el punto de partida delmóvil al punto de llegada. Es independiente de la trayectoria.
2. Velocidad media: Es el vector correspondiente al cuociente entre eldesplazamiento efectuado por el móvil y el tiempo empleado en efectuarlo.
3. Aceleración: Es el vector correspondiente al cuociente entre lavariación de la velocidad del móvil y el tiempo que emplea en ello.
4. Fuerza: Es la interacción entre dos o más cuerpos que puede causar elcambio de su movimiento. Fuerzas constantes dan origen a cambiosprogresivos del movimiento de un cuerpo o partícula en el tiempo.
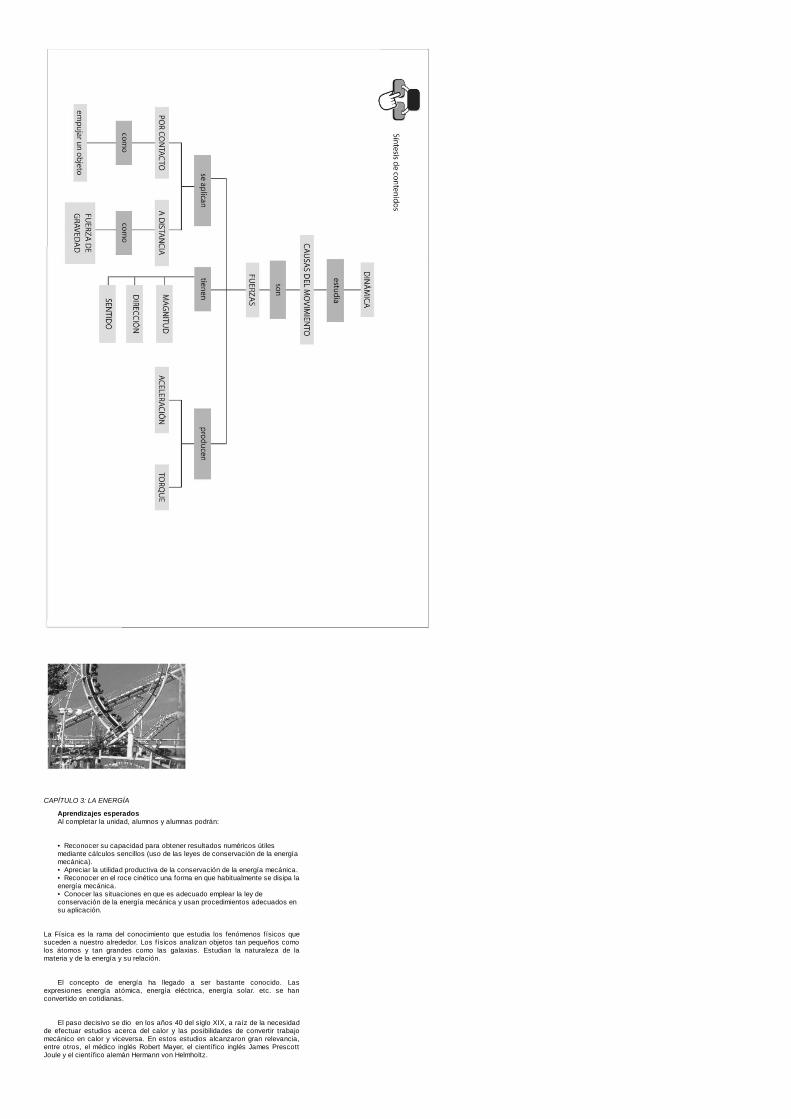
CAPÍTULO 3: LA ENERGÍA
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Reconocer su capacidad para obtener resultados numéricos útilesmediante cálculos sencillos (uso de las leyes de conservación de la energíamecánica).• Apreciar la utilidad productiva de la conservación de la energía mecánica.• Reconocer en el roce cinético una forma en que habitualmente se disipa laenergía mecánica.• Conocer las situaciones en que es adecuado emplear la ley deconservación de la energía mecánica y usan procedimientos adecuados ensu aplicación.
La Física es la rama del conocimiento que estudia los fenómenos físicos quesuceden a nuestro alrededor. Los físicos analizan objetos tan pequeños comolos átomos y tan grandes como las galaxias. Estudian la naturaleza de lamateria y de la energía y su relación.
El concepto de energía ha llegado a ser bastante conocido. Lasexpresiones energía atómica, energía eléctrica, energía solar. etc. se hanconvertido en cotidianas.
El paso decisivo se dio en los años 40 del siglo XIX, a raíz de la necesidadde efectuar estudios acerca del calor y las posibilidades de convertir trabajomecánico en calor y viceversa. En estos estudios alcanzaron gran relevancia,entre otros, el médico inglés Robert Mayer, el científico inglés James PrescottJoule y el científico alemán Hermann von Helmholtz.
Medio siglo más tarde, Einstein daría un paso de capital importancia alformular la equivalencia entre masa y energía en el marco de su teoría de larelatividad.
La ley de conservación de la energía, así como la rama de la Física que seconoce con el nombre de “termodinámica”, son hijas de la Revolución Industrial.
La propiedad más importante de la energía es que se conserva.Hablar del concepto de energía, por lo tanto, es hablar de la ley de
conservación de energía.
En Física existen los llamados Principios de Conservación, que seránestudiados en este capítulo y que ofrecen una nueva forma de analizar yresolver problemas.
1. Trabajo mecánico (W)
El término Trabajo es una expresión que escuchamos a diario y tienediversas acepciones en el lenguaje cotidiano. Por ejemplo, hablamos de “hacerun Trabajo de Investigación sobre vertebrados”, “de tener mucho trabajo”, deque “una máquina reemplaza el trabajo de varias personas”, etc.
En Física, si un cuerpo de cierta masa m experimenta un desplazamiento
bajo la acción de una fuerza externa, entonces se habla del Trabajo realizado
por la Fuerza y se designa por la letra W.
Cabe preguntarse entonces: ¿Toda fuerza actuando sobre un cuerporealiza trabajo sobre él?
Al levantar las pesas se realiza trabajo. Si pudiese levantarlas al doble dealtura, el levantador de pesas tendría que usar el doble de energía.
El trabajo es una medida de la Energía transferida.
“UnaFuerza realiza un Trabajo Mecánico W sobre un cuerpo cuando ella tiene una componente en dirección del desplazamiento”.
Ejemplo
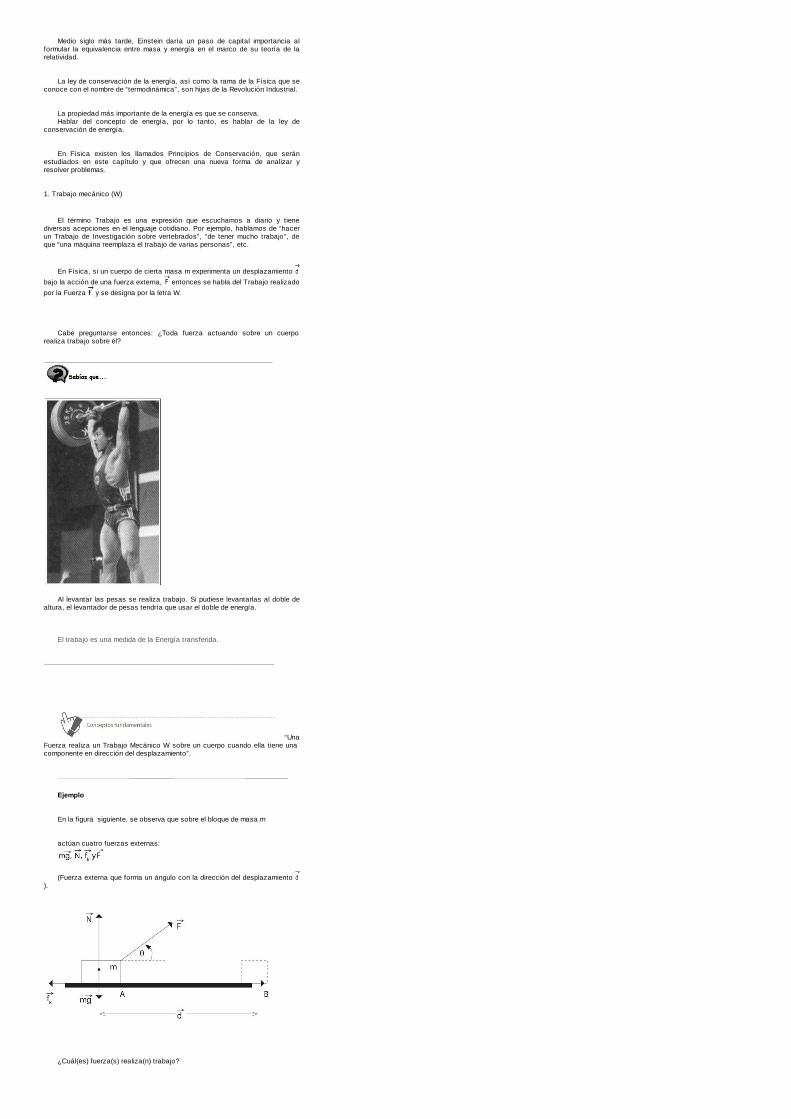
En la figura siguiente, se observa que sobre el bloque de masa m
actúan cuatro fuerzas externas:
(Fuerza externa que forma un ángulo con la dirección del desplazamiento ).
¿Cuál(es) fuerza(s) realiza(n) trabajo?
Solución:
Sólo y realizan trabajo sobre el bloque, pues tienen una componenteen la dirección del desplazamiento.
En cambio, y no efectúan trabajo porque, en este caso, sonperpendiculares a la dirección del movimiento.
Por lo tanto, se define el trabajo W realizado por una externa como el
producto punto entre los dos vectores y :
Ahora, por definición del Producto Punto, se tiene:
Donde:
W : Es el trabajo realizado por la fuerza en la dirección deldesplazamiento.
F cos θ: Es la componente de en la dirección del desplazamiento
: desplazamiento que experimenta el bloque bajo la acción de la fuerza
Gráficamente:
• Representación gráfica
El área bajo la curva del gráfico F v/s d, representa el trabajo W realizado.
De acuerdo con la expresión del trabajo W, se pueden distinguir cincosituaciones básicas:
i. Si tiene la misma dirección y sentido que .
Entonces:
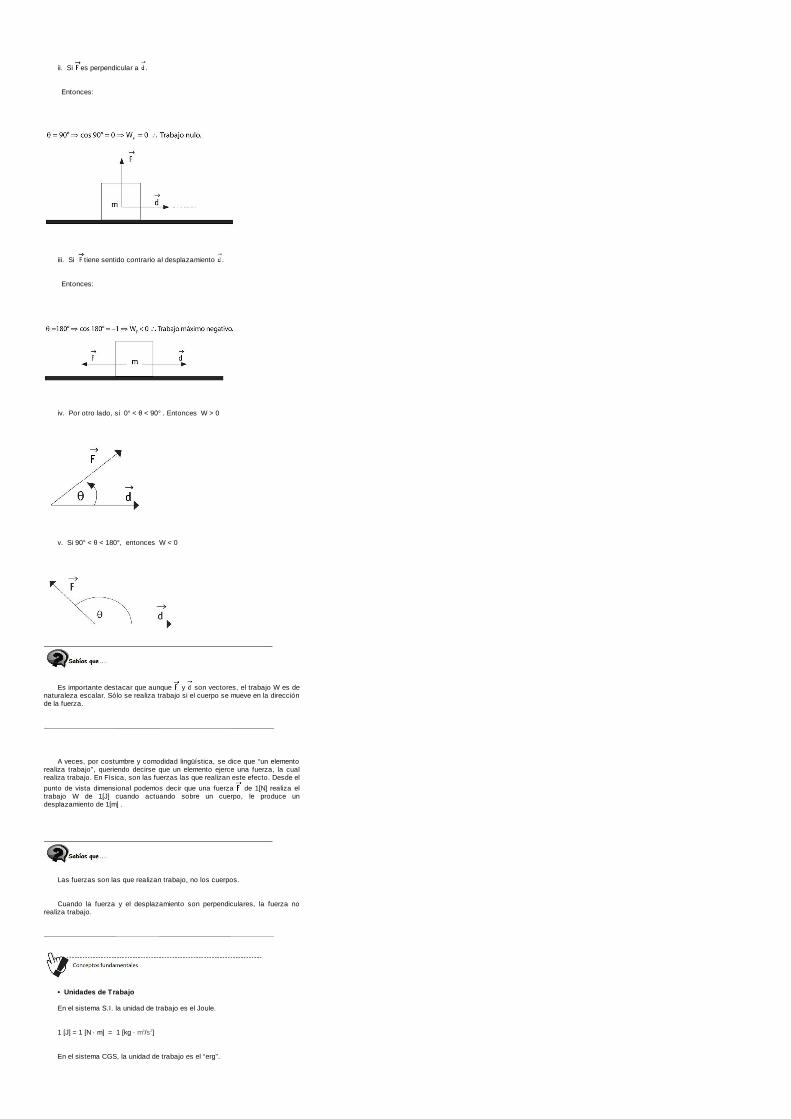
ii. Si es perpendicular a .
Entonces:
iii. Si tiene sentido contrario al desplazamiento .
Entonces:
iv. Por otro lado, si 0° < θ < 90° . Entonces W > 0
v. Si 90° < θ < 180°, entonces W < 0
Es importante destacar que aunque y son vectores, el trabajo W es denaturaleza escalar. Sólo se realiza trabajo si el cuerpo se mueve en la direcciónde la fuerza.
A veces, por costumbre y comodidad lingüística, se dice que “un elementorealiza trabajo”, queriendo decirse que un elemento ejerce una fuerza, la cualrealiza trabajo. En Física, son las fuerzas las que realizan este efecto. Desde el
punto de vista dimensional podemos decir que una fuerza de 1[N] realiza eltrabajo W de 1[J] cuando actuando sobre un cuerpo, le produce undesplazamiento de 1[m] .
Las fuerzas son las que realizan trabajo, no los cuerpos.
Cuando la fuerza y el desplazamiento son perpendiculares, la fuerza norealiza trabajo.
• Unidades de Trabajo
En el sistema S.I. la unidad de trabajo es el Joule.
1 [J] = 1 [N · m] = 1 [kg · m2/s2]
En el sistema CGS, la unidad de trabajo es el “erg”.
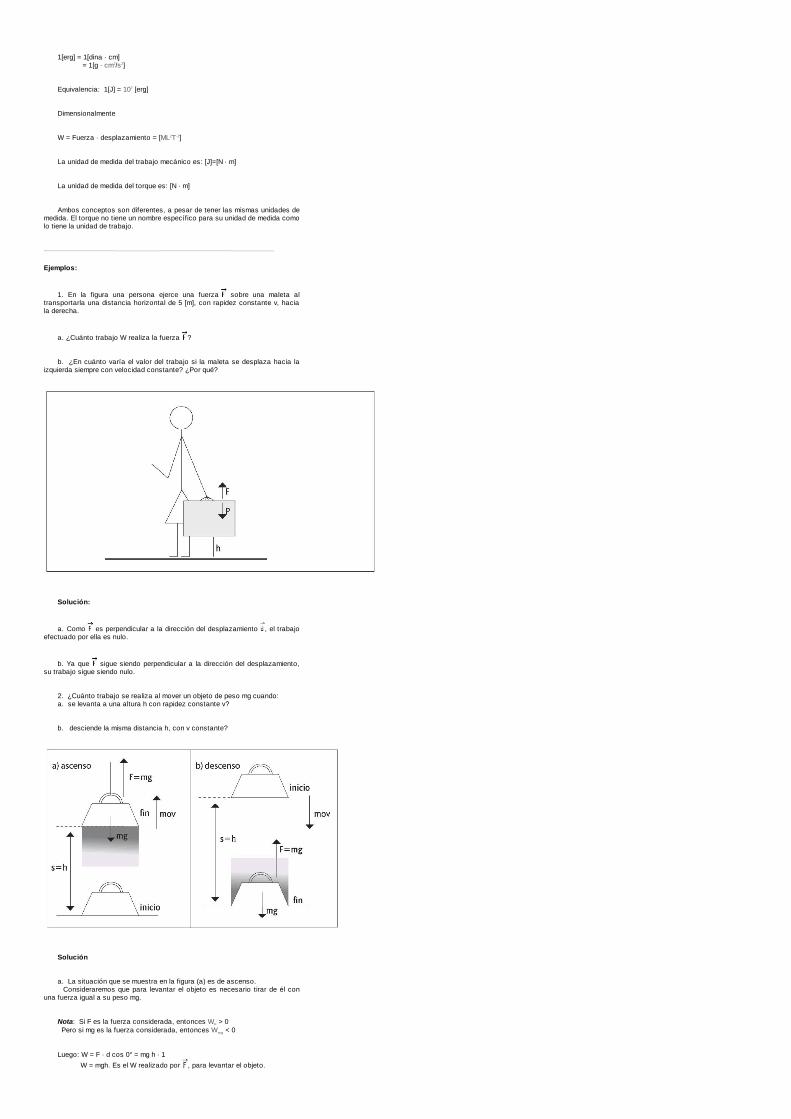
1[erg] = 1[dina · cm] = 1[g · cm2/s2]
Equivalencia: 1[J] = 107 [erg]
Dimensionalmente
W = Fuerza · desplazamiento = [ML2T -2]
La unidad de medida del trabajo mecánico es: [J]=[N · m]
La unidad de medida del torque es: [N · m]
Ambos conceptos son diferentes, a pesar de tener las mismas unidades demedida. El torque no tiene un nombre específico para su unidad de medida comolo tiene la unidad de trabajo.
Ejemplos:
1. En la figura una persona ejerce una fuerza sobre una maleta altransportarla una distancia horizontal de 5 [m], con rapidez constante v, haciala derecha.
a. ¿Cuánto trabajo W realiza la fuerza ?
b. ¿En cuánto varía el valor del trabajo si la maleta se desplaza hacia laizquierda siempre con velocidad constante? ¿Por qué?
Solución:
a. Como es perpendicular a la dirección del desplazamiento , el trabajoefectuado por ella es nulo.
b. Ya que sigue siendo perpendicular a la dirección del desplazamiento,su trabajo sigue siendo nulo.
2. ¿Cuánto trabajo se realiza al mover un objeto de peso mg cuando:a. se levanta a una altura h con rapidez constante v?
b. desciende la misma distancia h, con v constante?
Solución
a. La situación que se muestra en la figura (a) es de ascenso. Consideraremos que para levantar el objeto es necesario tirar de él con
una fuerza igual a su peso mg.
Nota: Si F es la fuerza considerada, entonces WF > 0 Pero si mg es la fuerza considerada, entonces Wm g < 0
Luego: W = F · d cos 0° = mg h · 1
W = mgh. Es el W realizado por , para levantar el objeto.
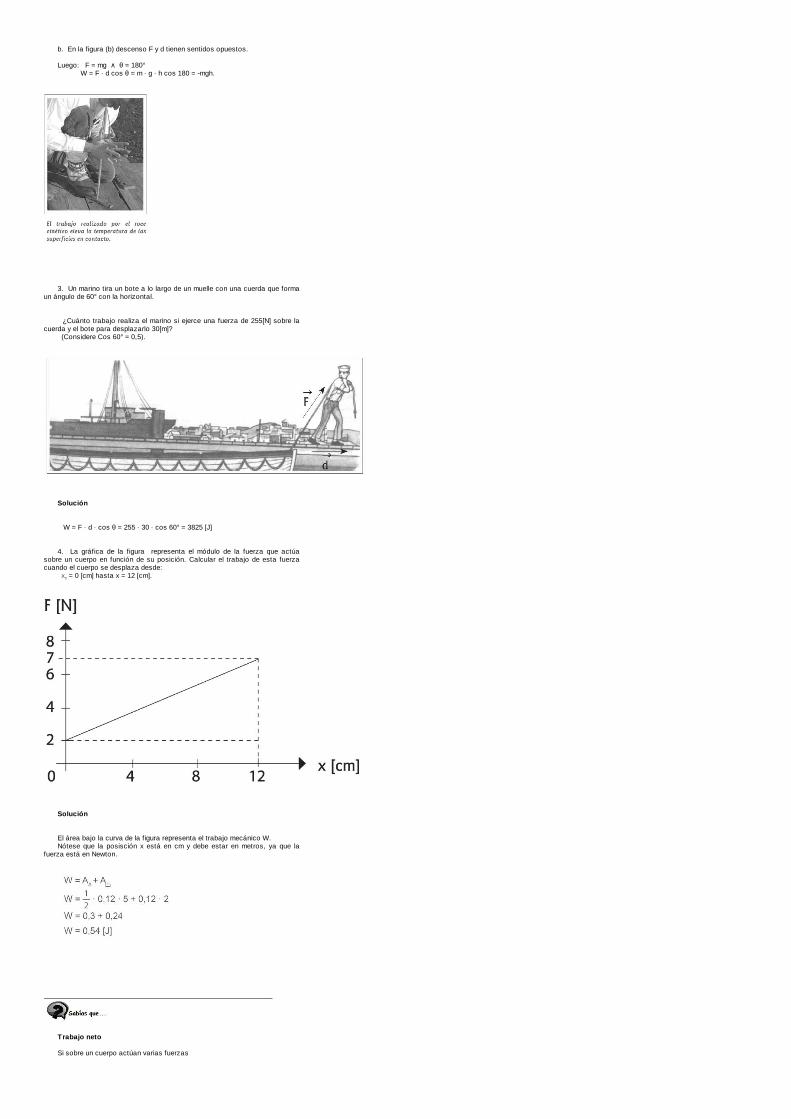
b. En la figura (b) descenso F y d tienen sentidos opuestos. Luego: F = mg ∧ θ = 180° W = F · d cos θ = m · g · h cos 180 = -mgh.
3. Un marino tira un bote a lo largo de un muelle con una cuerda que formaun ángulo de 60° con la horizontal.
¿Cuánto trabajo realiza el marino si ejerce una fuerza de 255[N] sobre lacuerda y el bote para desplazarlo 30[m]?
(Considere Cos 60° = 0,5).
Solución
W = F · d · cos θ = 255 · 30 · cos 60° = 3825 [J]
4. La gráfica de la figura representa el módulo de la fuerza que actúasobre un cuerpo en función de su posición. Calcular el trabajo de esta fuerzacuando el cuerpo se desplaza desde:
x0 = 0 [cm] hasta x = 12 [cm].
Solución
El área bajo la curva de la figura representa el trabajo mecánico W.Nótese que la posisción x está en cm y debe estar en metros, ya que la
fuerza está en Newton.
Trabajo neto
Si sobre un cuerpo actúan varias fuerzas
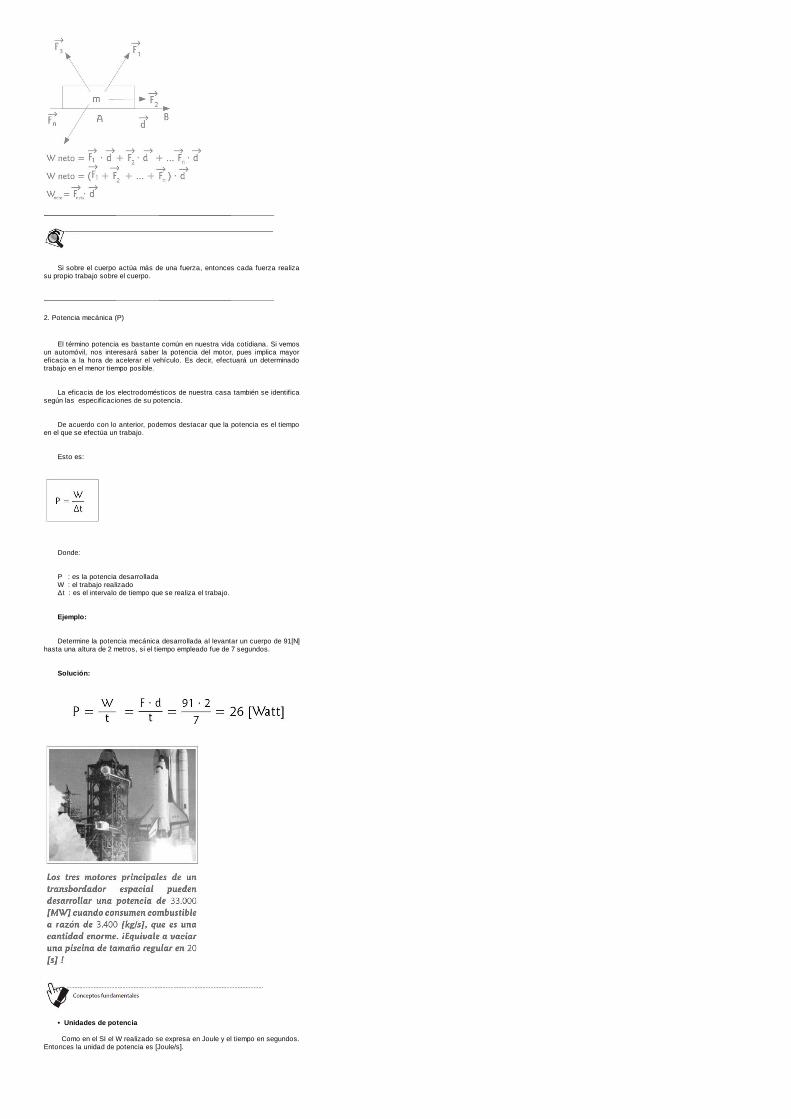
Si sobre el cuerpo actúa más de una fuerza, entonces cada fuerza realizasu propio trabajo sobre el cuerpo.
2. Potencia mecánica (P)
El término potencia es bastante común en nuestra vida cotidiana. Si vemosun automóvil, nos interesará saber la potencia del motor, pues implica mayoreficacia a la hora de acelerar el vehículo. Es decir, efectuará un determinadotrabajo en el menor tiempo posible.
La eficacia de los electrodomésticos de nuestra casa también se identificasegún las especificaciones de su potencia.
De acuerdo con lo anterior, podemos destacar que la potencia es el tiempoen el que se efectúa un trabajo.
Esto es:
Donde:
P : es la potencia desarrolladaW : el trabajo realizadoΔt : es el intervalo de tiempo que se realiza el trabajo.
Ejemplo:
Determine la potencia mecánica desarrollada al levantar un cuerpo de 91[N]hasta una altura de 2 metros, si el tiempo empleado fue de 7 segundos.
Solución:
• Unidades de potencia
Como en el SI el W realizado se expresa en Joule y el tiempo en segundos.Entonces la unidad de potencia es [Joule/s].
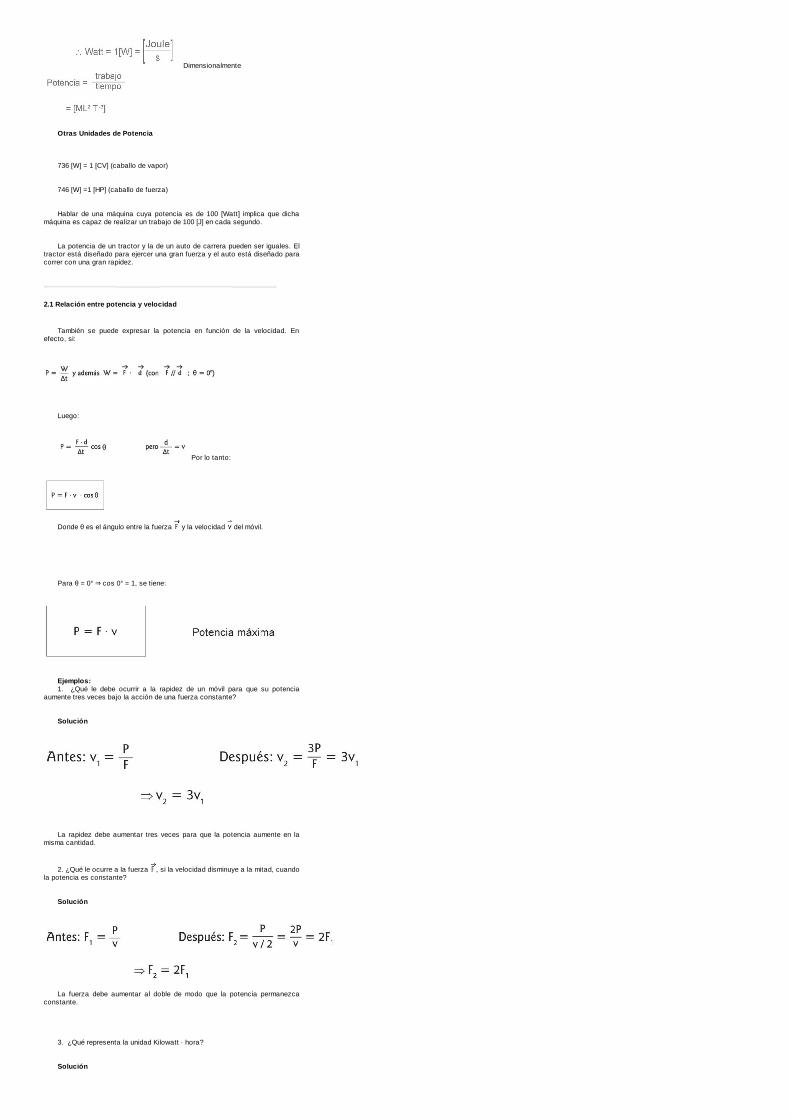
Dimensionalmente
Otras Unidades de Potencia
736 [W] = 1 [CV] (caballo de vapor)
746 [W] =1 [HP] (caballo de fuerza)
Hablar de una máquina cuya potencia es de 100 [Watt] implica que dichamáquina es capaz de realizar un trabajo de 100 [J] en cada segundo.
La potencia de un tractor y la de un auto de carrera pueden ser iguales. Eltractor está diseñado para ejercer una gran fuerza y el auto está diseñado paracorrer con una gran rapidez.
2.1 Relación entre potencia y velocidad
También se puede expresar la potencia en función de la velocidad. Enefecto, si:
Luego:
Por lo tanto:
Donde θ es el ángulo entre la fuerza y la velocidad del móvil.
Para θ = 0° ⇒ cos 0° = 1, se tiene:
Ejemplos:1. ¿Qué le debe ocurrir a la rapidez de un móvil para que su potencia
aumente tres veces bajo la acción de una fuerza constante?
Solución
La rapidez debe aumentar tres veces para que la potencia aumente en lamisma cantidad.
2. ¿Qué le ocurre a la fuerza , si la velocidad disminuye a la mitad, cuandola potencia es constante?
Solución
La fuerza debe aumentar al doble de modo que la potencia permanezcaconstante.
3. ¿Qué representa la unidad Kilowatt · hora?
Solución
Trabajo = Potencia · tiempo
Luego, si la potencia se mide en kilowatt y el tiempo en horas, se tiene:
Trabajo = Potencia · Tiempo W = 1 [kilowatt · hora] W = 1 [kWh]
Además:
1Kwh se relaciona con el Joule de la siguiente forma:
Por lo tanto, podemos decir que 1 [kWh] equivale al trabajo que es capaz derealizar una máquina de 1000 [W] de potencia en 1 hora.
El [kWh] es el trabajo hecho por una máquina que desarrolla una potenciade 1 [kW] en 1 [h].
Representación gráfica de la potencia
La pendiente de la curva de un gráfico W v/s t, representa la potenciadesarrollada. Así, el gráfico (1) muestra una potencia constante y el gráfico (2)una potencia variable (en disminución) pues disminuye la pendiente a medida quepasa el tiempo.
4. Un motor levanta un objeto de 200 [kg] con una rapidez constante de 3[cm/s]. Considerando g = 10 [m/s2], ¿cuál es la potencia que desarrolla el motoren watts?
Solución
P = F · v P = mg · v P = 200 · 10 · 0,03 = 60 [watts]
5. Un ascensor levanta 6 pasajeros 30 [m] en 1 [min]. Si el ascensor tieneuna masa de 900 [kg] y cada pasajero masa 65 [kg], calcular la potenciadesarrollada por el motor en ese tiempo.
Solución
6. Se desea que un ascensor de masa igual a 1.000 [kg] suba con unarapidez constante de 0,5 [m/s]. ¿Qué potencia mínima debe tener el motor ainstalar?
Solución
Analizando D.C.L.
Superponiendo fuerzas verticales:
F - mg = 0 ⇒ F = mg
Calculando la Potencia necesaria:
P = · = 1.000 · 10 · 0,5 = 5000 [W]
Algunas potencias conocidas
• La potencia de un caballo común es algo inferior a 1 HP• Un auto mediano tiene una potencia de 80 HP• Una locomotora entre 500 y 1.000 HP• Un hombre, alrededor de 1/7 HP
La potencia es un escalar, porque W y t son escalares.
Si el movimiento es unidimensional el desplazamiento corresponde a:
3. Teorema Trabajo - Energía
Consideremos el trabajo total realizado por la fuerza externa resultante,que la supondremos constante y que el cuerpo se mueve horizontalmente enlínea recta, a lo largo del eje horizontal. Como se ve en el ejemplo del carrito.
WT= Trabajo total realizado por la fuerza resultante. Fx= Componente horizontal de fuerza. Δx = x2 – x1: Desplazamiento que experimenta el cuerpo.
Como Fx = constante
Reemplazando (2) en (1)
Por tratarse de una fuerza neta constante ⇒ MRUA
Donde v0 y v son las rapideces inicial y final del cuerpo.
Sustituyendo (4) en (3) se tiene:
4. Energía cinética (Ec)
Es la energía que tienen los cuerpos que están en movimiento con unacierta velocidad distinta de cero. Se designa por Ec y se define por:
También se usa como designación de Ec la letra mayúscula K.
En consecuencia, Ec depende directamente del cuadrado de la rapidez. Porejemplo, si la velocidad del cuerpo aumenta al doble, entonces Ec aumentarácuatro veces.
Volviendo a la expresión (5), tenemos
ΔEc: Variación de laenergía cinética.
Nota: Al aplicar el teorema trabajo – energía debemos tener en cuenta que:
• Si la Fuerza Neta apunta en la misma dirección y sentido del movimiento,entonces produce un aumento de
Ec ⇒ ΔEc > 0.
• En cambio, si la Fuerza Neta apunta en sentido contrario al movimiento,producirá una reducción de
Ec ⇒ ΔEc < 0. Ejemplo: La fuerza de roce.
La energía eólica corresponde a la energía cinética del viento. La energíacinética la tienen todos los cuerpos en movimiento.
Representación gráfica. Un cuerpo que se lanza verticalmente hacia arriba yvuelve al punto de partida.
Ejemplo:
El automóvil de la figura tiene 2.000 [kg] de masa y viaja a 20 [m/s]. Despuésde apagar el motor se desplaza 100 [m] en un camino plano hasta detenerse.
a. ¿Qué fuerzas actúan sobre el automóvil?b. ¿Cuál es el trabajo total realizado por la fuerza externa resultante?c. ¿Cuál es el valor de la fuerza de roce?
Solución
a. Fuerzas externas que actúan: , , .
Fuerza Neta: ∑ Fx: fx = -m · a
b. Aplicando el teorema trabajo - energía se tiene:
(El signo menos indica que actúa en contra del movimiento para el ejeasignado)
5. Energía potencial (Ep)
Consideremos la siguiente situación:
Se pone un cuerpo situado a una cierta altura h sobre el suelo. Debido a laatracción gravitatoria de la Tierra, si el cuerpo se deja caer, él solo será capazde realizar un trabajo al llegar al suelo: aplastar un objeto, comprimir un resorte,etc.
En tal caso podemos decir que un cuerpo situado a cierta altura poseeenergía, pues tiene la capacidad de efectuar un trabajo al caer.
De la misma manera, si uniéramos un cuerpo al extremo de un resortecomprimido o estirado, al soltar el resorte, éste será capaz de empujar o tirar alcuerpo efectuando también un trabajo mecánico.
En cualquiera de los casos, basta soltar el elemento para que se desarrolledicho trabajo; entonces, podemos decir que en todos ellos existe una EnergíaPotencial asociada.
De acuerdo con lo planteado anteriormente, podemos afirmar que un cuerposituado a una cierta altura h posee una cierta energía potencial, que depende dela altura a la que se encuentre el cuerpo.
5.1 Energía potencial gravitatoria
Se define como la energía que posee un cuerpo dentro de un campogravitacional y que se encuentra a una cierta altura respecto de un nivel dereferencia dado. Se expresa como
También se usa como designación de Ep, la letra mayúscula U.
La energía potencial gravitatoria depende de la altura h, la cual se mide a partirde un nivel de referencia que se puede elegir arbitrariamente.
5.1.1 Trabajo realizado por la energía potencial gravitatoria
Supongamos que queremos determinar el trabajo realizado por el peso
, cuando se traslada del punto A a un punto B siguiendo cualquiertrayectoria, tal como se indica en la siguiente figura.
A lo largo de la trayectoria, el peso apunta verticalmente hacia abajoy no tiene componente horizontal, sólo componente vertical negativa.
El producto mghB corresponde a la Energía Potencial Gravitatoria en elpunto B y el término mghA a la Energía Potencial Gravitatoria en el punto A.Luego el trabajo mecánico realizado por el peso estará dado por:
i. El trabajo realizado por el peso entre los puntos A y B es independiente dela trayectoria (se habla, por lo tanto, de una fuerza conservativa). Sólodepende de la posición inicial y final y es siempre igual a la variación de energíapotencial gravitatoria, con signo contrario.
ii. La Energía Potencial Gravitatoria puede ser positiva, negativa, o cero,según el nivel de referencia para medir h.
Ejemplo
En una habitación de 3 [m] de altura y sobre una mesa de 1,2 [m] de alturase encuentra un saco de harina de 2,4 [kg]. Suponiendo g = 10 [m/s2], ¿cuál es laenergía potencial gravitatoria del saco de harina?
a. respecto al piso.b. respecto a la superficie de la mesa.c. respecto al techo.
Solución:
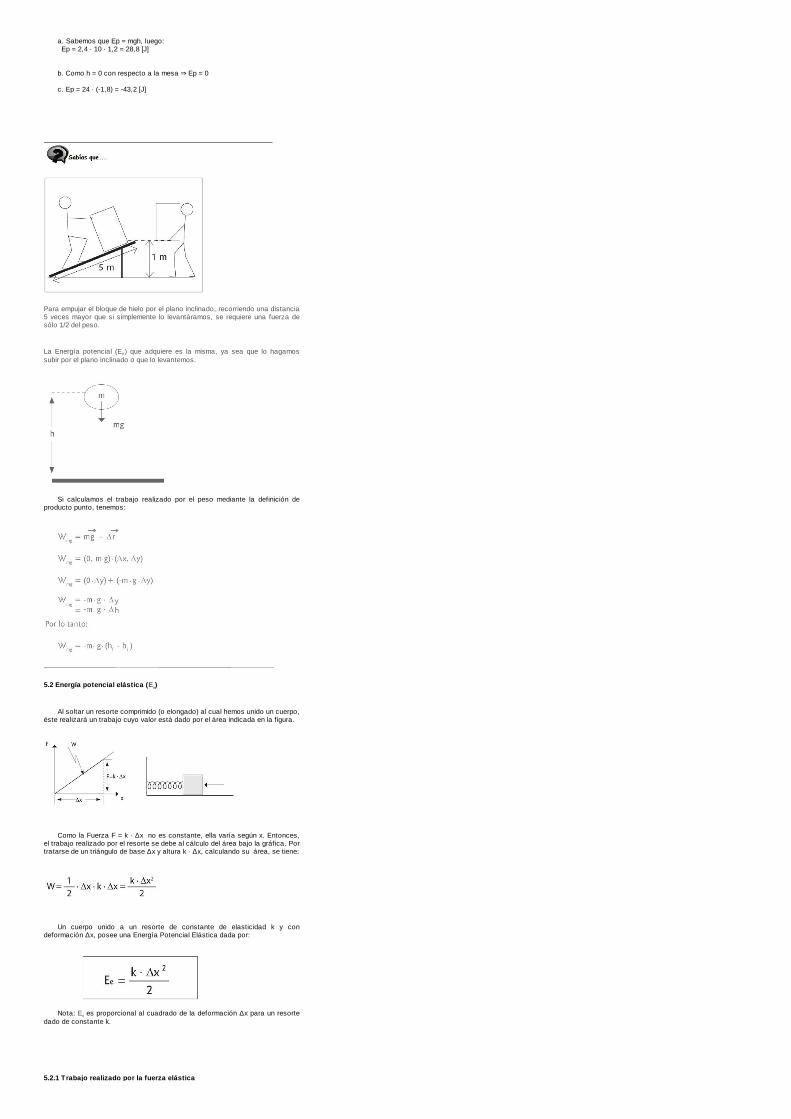
a. Sabemos que Ep = mgh, luego: Ep = 2,4 · 10 · 1,2 = 28,8 [J]
b. Como h = 0 con respecto a la mesa ⇒ Ep = 0 c. Ep = 24 · (-1,8) = -43,2 [J]
Para empujar el bloque de hielo por el plano inclinado, recorriendo una distancia5 veces mayor que si simplemente lo levantáramos, se requiere una fuerza desólo 1/2 del peso.
La Energía potencial (EP) que adquiere es la misma, ya sea que lo hagamossubir por el plano inclinado o que lo levantemos.
Si calculamos el trabajo realizado por el peso mediante la definición deproducto punto, tenemos:
5.2 Energía potencial elástica (Ee)
Al soltar un resorte comprimido (o elongado) al cual hemos unido un cuerpo,éste realizará un trabajo cuyo valor está dado por el área indicada en la figura.
Como la Fuerza F = k · Δx no es constante, ella varía según x. Entonces,el trabajo realizado por el resorte se debe al cálculo del área bajo la gráfica. Portratarse de un triángulo de base Δx y altura k · Δx, calculando su área, se tiene:
Un cuerpo unido a un resorte de constante de elasticidad k y condeformación Δx, posee una Energía Potencial Elástica dada por:
Nota: Ee es proporcional al cuadrado de la deformación Δx para un resortedado de constante k.
5.2.1 Trabajo realizado por la fuerza elástica
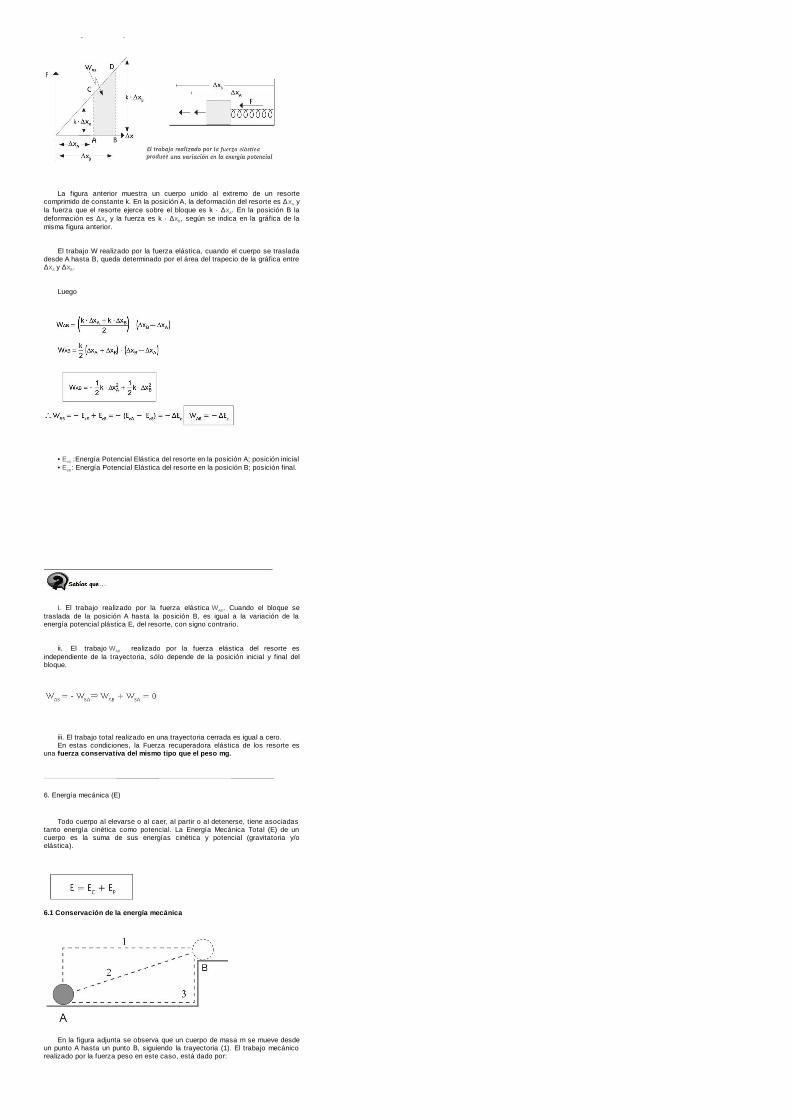
5.2.1 Trabajo realizado por la fuerza elástica
La figura anterior muestra un cuerpo unido al extremo de un resortecomprimido de constante k. En la posición A, la deformación del resorte es ΔxA yla fuerza que el resorte ejerce sobre el bloque es k · ΔxA. En la posición B ladeformación es ΔxB y la fuerza es k · ΔxB, según se indica en la gráfica de lamisma figura anterior.
El trabajo W realizado por la fuerza elástica, cuando el cuerpo se trasladadesde A hasta B, queda determinado por el área del trapecio de la gráfica entreΔxA y ΔxB.
Luego
• EeA :Energía Potencial Elástica del resorte en la posición A; posición inicial• EeB: Energía Potencial Elástica del resorte en la posición B; posición final.
i. El trabajo realizado por la fuerza elástica WAB. Cuando el bloque setraslada de la posición A hasta la posición B, es igual a la variación de laenergía potencial plástica E, del resorte, con signo contrario.
ii. El trabajo WAB realizado por la fuerza elástica del resorte esindependiente de la trayectoria, sólo depende de la posición inicial y final delbloque.
iii. El trabajo total realizado en una trayectoria cerrada es igual a cero.En estas condiciones, la Fuerza recuperadora elástica de los resorte es
una fuerza conservativa del mismo tipo que el peso mg.
6. Energía mecánica (E)
Todo cuerpo al elevarse o al caer, al partir o al detenerse, tiene asociadastanto energía cinética como potencial. La Energía Mecánica Total (E) de uncuerpo es la suma de sus energías cinética y potencial (gravitatoria y/oelástica).
6.1 Conservación de la energía mecánica
En la figura adjunta se observa que un cuerpo de masa m se mueve desdeun punto A hasta un punto B, siguiendo la trayectoria (1). El trabajo mecánicorealizado por la fuerza peso en este caso, está dado por:
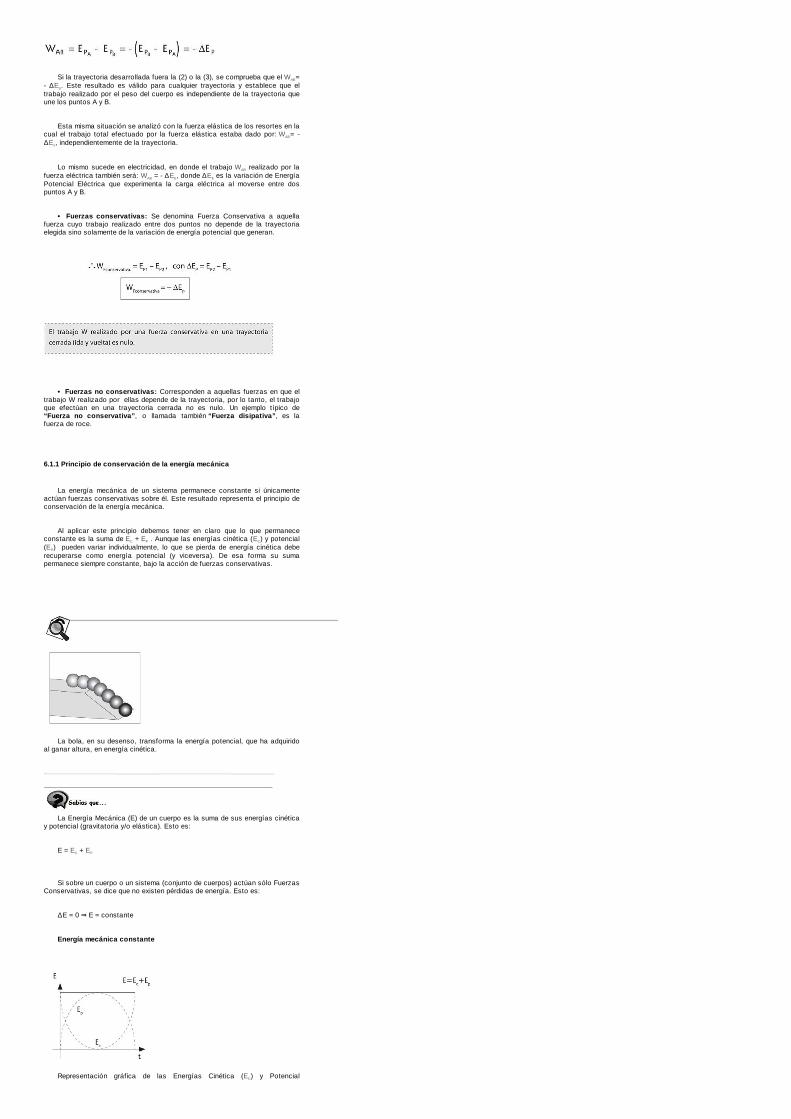
Si la trayectoria desarrollada fuera la (2) o la (3), se comprueba que el WAB=- ΔEp. Este resultado es válido para cualquier trayectoria y establece que eltrabajo realizado por el peso del cuerpo es independiente de la trayectoria queune los puntos A y B.
Esta misma situación se analizó con la fuerza elástica de los resortes en lacual el trabajo total efectuado por la fuerza elástica estaba dado por: WAB= -ΔEe, independientemente de la trayectoria.
Lo mismo sucede en electricidad, en donde el trabajo WAB realizado por lafuerza eléctrica también será: WAB = - ΔEE, donde ΔEE es la variación de EnergíaPotencial Eléctrica que experimenta la carga eléctrica al moverse entre dospuntos A y B.
• Fuerzas conservativas: Se denomina Fuerza Conservativa a aquellafuerza cuyo trabajo realizado entre dos puntos no depende de la trayectoriaelegida sino solamente de la variación de energía potencial que generan.
• Fuerzas no conservativas: Corresponden a aquellas fuerzas en que eltrabajo W realizado por ellas depende de la trayectoria, por lo tanto, el trabajoque efectúan en una trayectoria cerrada no es nulo. Un ejemplo típico de“Fuerza no conservativa”, o llamada también “Fuerza disipativa”, es lafuerza de roce.
6.1.1 Principio de conservación de la energía mecánica
La energía mecánica de un sistema permanece constante si únicamenteactúan fuerzas conservativas sobre él. Este resultado representa el principio deconservación de la energía mecánica.
Al aplicar este principio debemos tener en claro que lo que permanececonstante es la suma de EC + EP . Aunque las energías cinética (EC) y potencial(EP) pueden variar individualmente, lo que se pierda de energía cinética deberecuperarse como energía potencial (y viceversa). De esa forma su sumapermanece siempre constante, bajo la acción de fuerzas conservativas.
La bola, en su desenso, transforma la energía potencial, que ha adquiridoal ganar altura, en energía cinética.
La Energía Mecánica (E) de un cuerpo es la suma de sus energías cinéticay potencial (gravitatoria y/o elástica). Esto es:
E = EC + EP
Si sobre un cuerpo o un sistema (conjunto de cuerpos) actúan sólo FuerzasConservativas, se dice que no existen pérdidas de energía. Esto es:
ΔE = 0 ⇒ E = constante
Energía mecánica constante
Representación gráfica de las Energías Cinética (EC) y Potencial
Representación gráfica de las Energías Cinética (E ) y PotencialGravitatoria (EP) de un cuerpo lanzado verticalmente hacia arriba y que vuelve alpunto de partida. Si se desprecia la acción del roce, la Energía Mecánica (E) seconserva durante todo el proceso, por lo que su suma instantánea esconstante, como lo indica la línea continua horizontal sobre las curvassegmentadas de EC y EP.
Energía Mecánica en la Montaña Rusa
Una aplicación del “Principio de la conservación de la Energía mecánica” loconstituye la montaña Rusa, en donde se puede verificar lo siguiente de acuerdoa su trayectoria:
a. Posición de equilibrio estable: Punto en el cual Ep es mínima, lapendiente es cero (horizontalidad) y, por lo tanto, la fuerza resultante sobrela partícula es nula.
b. Posición de equilibrio inestable: Punto en el cual la Ep es máxima, lapendiente de la curva es cero, y la fuerza resultante sobre la partícula esnula. Una partícula en reposo en este punto permanecerá en ese estado;pero si se desplaza una pequeña distancia de dicho punto, la fuerza degravedad tenderá a alejarla todavía más de la posición de equilibrio.
c. Punto de retorno: Punto de mayor altura alcanzado en un movimientoacotado.
6.1.2 Trabajo realizado por las fuerzas no conservativas
De acuerdo al Teorema Trabajo – Energía, sabemos que:
Si separamos el trabajo realizado por la Fuerza Neta (WFneta) en:
I. Trabajo de las Fuerzas no conservativas (WNC)II. Trabajo de la Fuerzas Conservativas (WC), se tiene:
Ya que WC = - ΔEP por ser fuerzas conservativas, al reemplazar tenemos:
El trabajo W realizado por las fuerzas no conservativas es igual a lavariación de la Energía Mecánica (ΔE) del sistema o del cuerpo.
Ahora, recíprocamente, si ΔE = 0 ⇒ ΔE = EB - EA = 0
Es decir, la energía mecánica del sistema permanece constante siúnicamente actúan fuerzas conservativas, lo que demuestra el “Principio deConservación de la Energía Mecánica”.
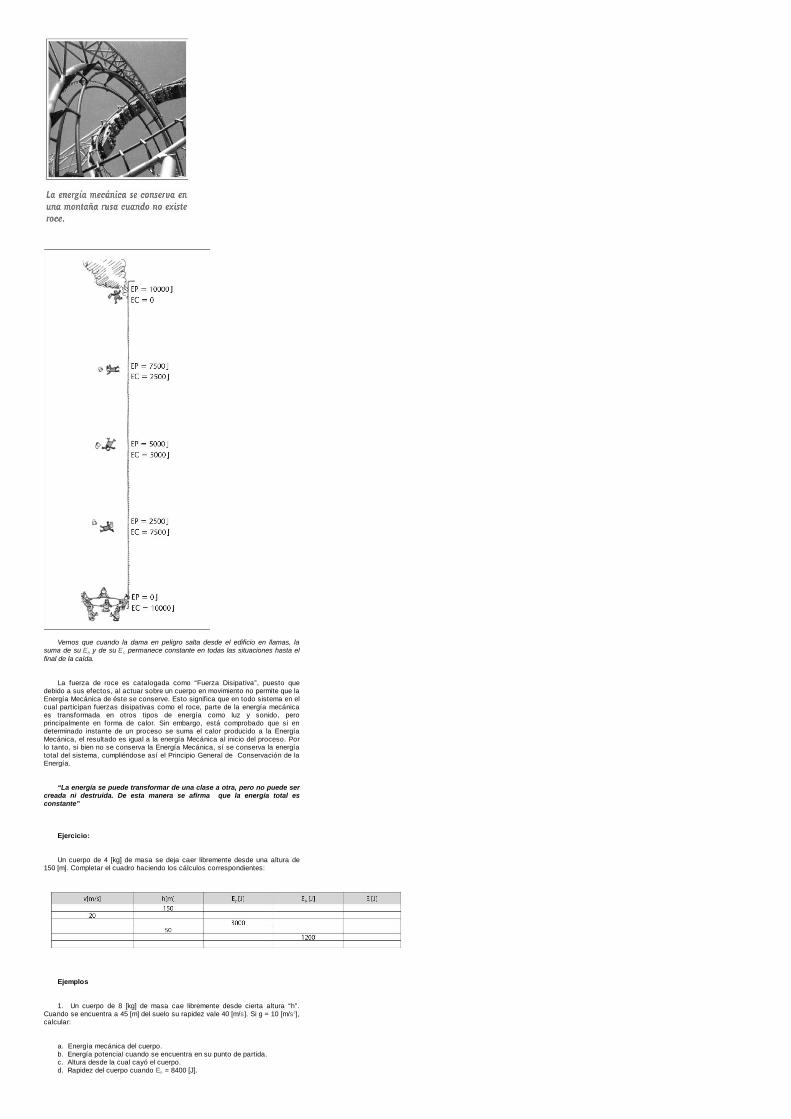
Vemos que cuando la dama en peligro salta desde el edificio en llamas, lasuma de su EB y de su EC permanece constante en todas las situaciones hasta elfinal de la caída.
La fuerza de roce es catalogada como “Fuerza Disipativa”, puesto quedebido a sus efectos, al actuar sobre un cuerpo en movimiento no permite que laEnergía Mecánica de éste se conserve. Esto significa que en todo sistema en elcual participan fuerzas disipativas como el roce, parte de la energía mecánicaes transformada en otros tipos de energía como luz y sonido, peroprincipalmente en forma de calor. Sin embargo, está comprobado que si endeterminado instante de un proceso se suma el calor producido a la EnergíaMecánica, el resultado es igual a la energía Mecánica al inicio del proceso. Porlo tanto, si bien no se conserva la Energía Mecánica, sí se conserva la energíatotal del sistema, cumpliéndose así el Principio General de Conservación de laEnergía.
“La energía se puede transformar de una clase a otra, pero no puede sercreada ni destruida. De esta manera se afirma que la energía total esconstante”
Ejercicio:
Un cuerpo de 4 [kg] de masa se deja caer libremente desde una altura de150 [m]. Completar el cuadro haciendo los cálculos correspondientes:
Ejemplos
1. Un cuerpo de 8 [kg] de masa cae libremente desde cierta altura “h”.Cuando se encuentra a 45 [m] del suelo su rapidez vale 40 [m/s]. Si g = 10 [m/s2],calcular:
a. Energía mecánica del cuerpo.b. Energía potencial cuando se encuentra en su punto de partida.c. Altura desde la cual cayó el cuerpo.d. Rapidez del cuerpo cuando EP = 8400 [J].

d. Rapidez del cuerpo cuando E = 8400 [J].
Solución
2. Un cuerpo es lanzado verticalmente hacia arriba con v0 = 6[m/s], comomuestra la figura adjunta. Si la resistencia del aire es despreciable, ¿a quéaltura llega el cuerpo?
Fig. Ejemplo 2
Como es la única fuerza que actúa sobre el cuerpo y es conservativa:
El objeto llega a una altura de 1,8 [m] desde el nivel de lanzamiento.
3. De acuerdo al tobogán de la figura adjunta, si el niño parte del reposo enA, ¿con qué velocidad llega el niño al punto más bajo B? (despreciar roce entrela persona y el tobogán).
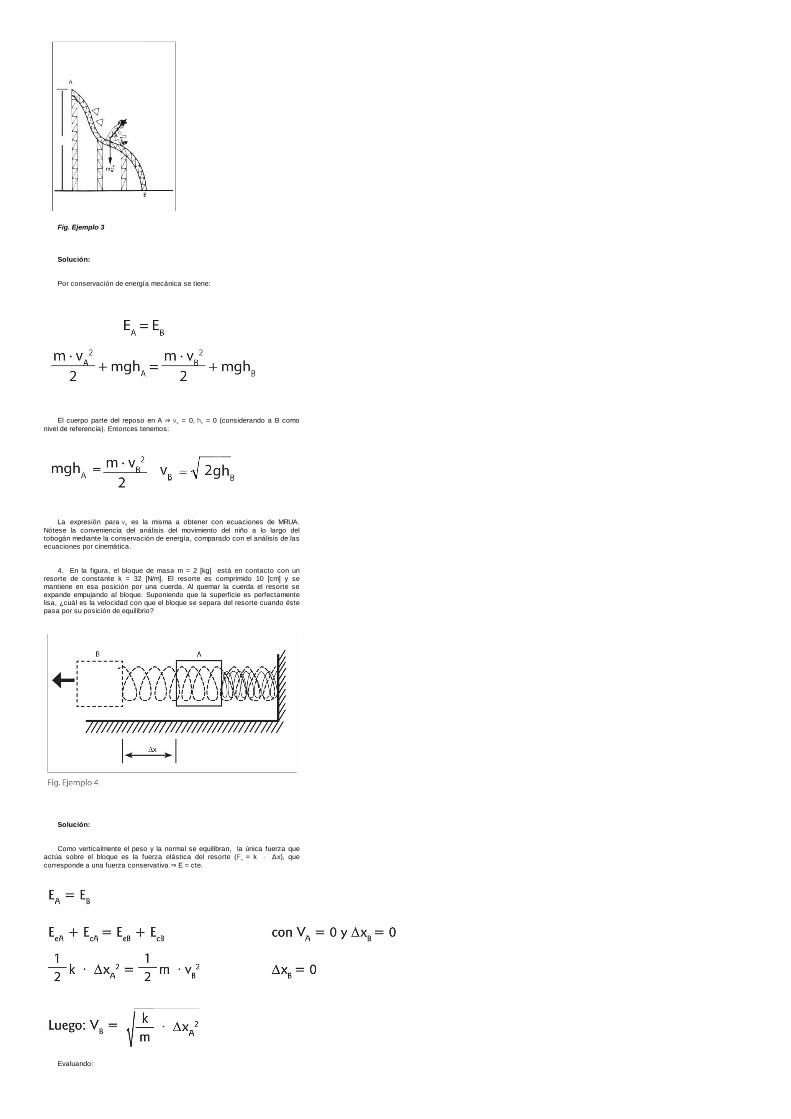
Fig. Ejemplo 3
Solución:
Por conservación de energía mecánica se tiene:
El cuerpo parte del reposo en A ⇒ vA = 0, hb = 0 (considerando a B comonivel de referencia). Entonces tenemos:
La expresión para vB es la misma a obtener con ecuaciones de MRUA.Nótese la conveniencia del análisis del movimiento del niño a lo largo deltobogán mediante la conservación de energía, comparado con el análisis de lasecuaciones por cinemática.
4. En la figura, el bloque de masa m = 2 [kg] está en contacto con unresorte de constante k = 32 [N/m]. El resorte es comprimido 10 [cm] y semantiene en esa posición por una cuerda. Al quemar la cuerda el resorte seexpande empujando al bloque. Suponiendo que la superficie es perfectamentelisa, ¿cuál es la velocidad con que el bloque se separa del resorte cuando éstepasa por su posición de equilibrio?
Solución:
Como verticalmente el peso y la normal se equilibran, la única fuerza queactúa sobre el bloque es la fuerza elástica del resorte (Fe = k · Δx), quecorresponde a una fuerza conservativa ⇒ E = cte.
Evaluando:
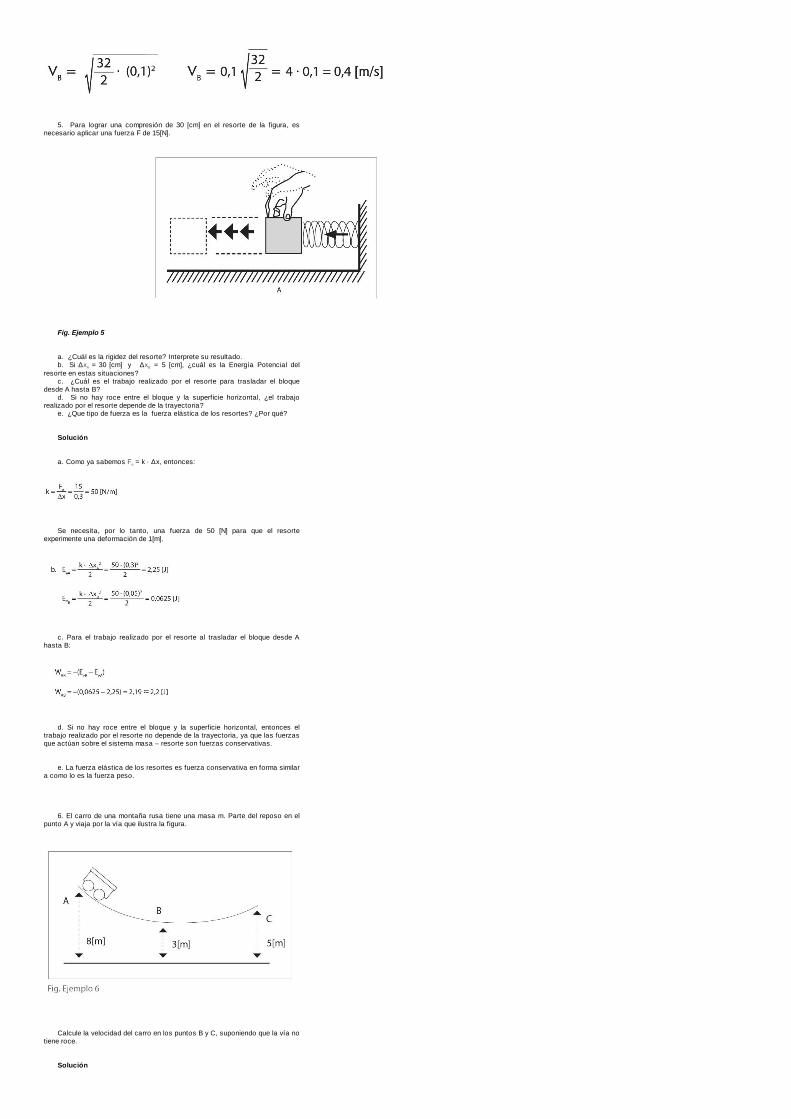
5. Para lograr una compresión de 30 [cm] en el resorte de la figura, esnecesario aplicar una fuerza F de 15[N].
Fig. Ejemplo 5
a. ¿Cuál es la rigidez del resorte? Interprete su resultado.b. Si ΔxA = 30 [cm] y ΔxB = 5 [cm], ¿cuál es la Energía Potencial del
resorte en estas situaciones?c. ¿Cuál es el trabajo realizado por el resorte para trasladar el bloque
desde A hasta B?d. Si no hay roce entre el bloque y la superficie horizontal, ¿el trabajo
realizado por el resorte depende de la trayectoria?e. ¿Que tipo de fuerza es la fuerza elástica de los resortes? ¿Por qué?
Solución
a. Como ya sabemos Fe = k · Δx, entonces:
Se necesita, por lo tanto, una fuerza de 50 [N] para que el resorteexperimente una deformación de 1[m].
c. Para el trabajo realizado por el resorte al trasladar el bloque desde Ahasta B:
d. Si no hay roce entre el bloque y la superficie horizontal, entonces eltrabajo realizado por el resorte no depende de la trayectoria, ya que las fuerzasque actúan sobre el sistema masa – resorte son fuerzas conservativas.
e. La fuerza elástica de los resortes es fuerza conservativa en forma similara como lo es la fuerza peso.
6. El carro de una montaña rusa tiene una masa m. Parte del reposo en elpunto A y viaja por la vía que ilustra la figura.
Calcule la velocidad del carro en los puntos B y C, suponiendo que la vía notiene roce.
Solución
Si no existe roce entonces el sistema es conservativo, pues en todomomento sólo actúan el peso y la normal sobre el cuerpo.
Por lo tanto E = cte ⇒ EA = EB
Luego:
Evaluando:
Análogamente:
para obtener VC EA = EB
En ambos casos la velocidad que alcance el carro es independiente de sumasa.
7. El carro del problema anterior tiene una rapidez de 1,5 [m/s] hacia laizquierda al pasar por el punto A. Calcule la velocidad del carro en los puntos By C, suponiendo que no existe roce.
Solución
Para las mismas condiciones anteriores E = cte. Siempre considerandosentido positivo de desplazamiento hacia la derecha:
EA = EB
Evaluando
Análogamente:
Evaluando:
Como E = cte. que la rapidez vA del carro sea igual a -1,5 [m/s] y se aleje deB y C no afecta el cálculo de las velocidades vB y vC, pues al pasar de nuevo porA, de vuelta, la rapidez del carro será la misma.
8. Un carro parte del reposo en A y se desliza siguiendo la trayectoria quese indica en la figura adjunta. Si en la parte plana existe roce de coeficiente µK=
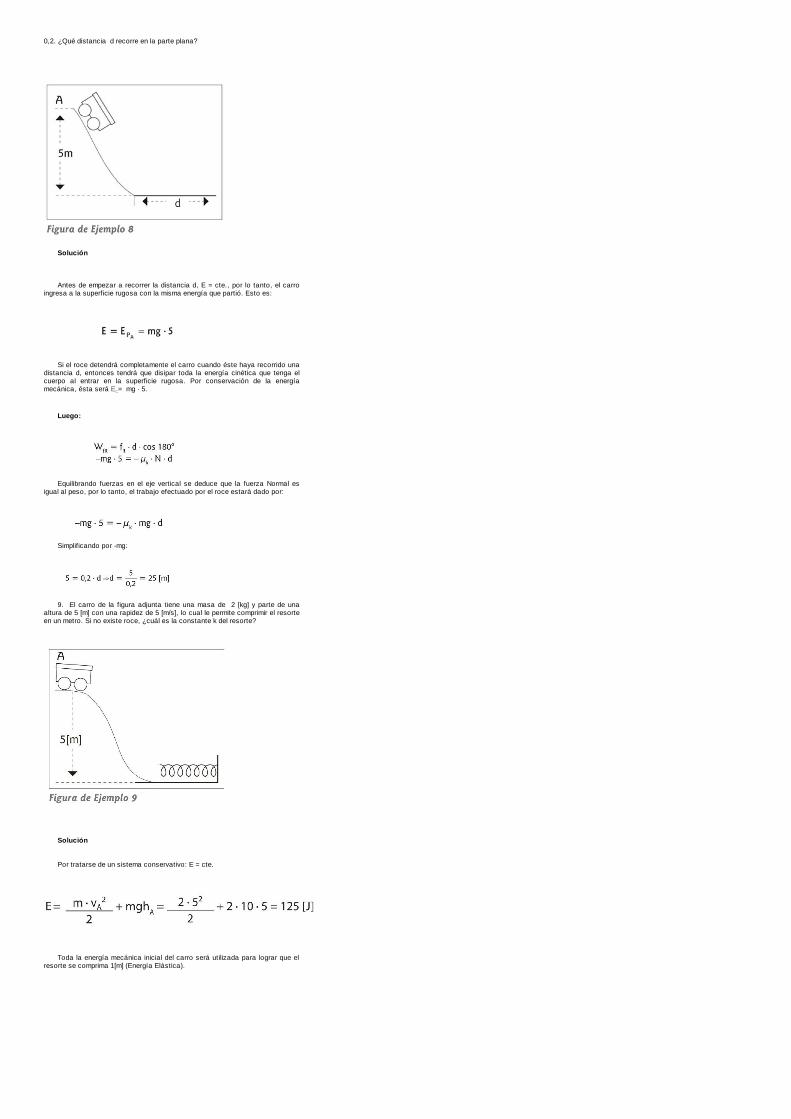
se indica en la figura adjunta. Si en la parte plana existe roce de coeficiente µ =0,2. ¿Qué distancia d recorre en la parte plana?
Solución
Antes de empezar a recorrer la distancia d, E = cte., por lo tanto, el carroingresa a la superficie rugosa con la misma energía que partió. Esto es:
Si el roce detendrá completamente el carro cuando éste haya recorrido unadistancia d, entonces tendrá que disipar toda la energía cinética que tenga elcuerpo al entrar en la superficie rugosa. Por conservación de la energíamecánica, ésta será EC= mg · 5.
Luego:
Equilibrando fuerzas en el eje vertical se deduce que la fuerza Normal esigual al peso, por lo tanto, el trabajo efectuado por el roce estará dado por:
Simplificando por -mg:
9. El carro de la figura adjunta tiene una masa de 2 [kg] y parte de unaaltura de 5 [m] con una rapidez de 5 [m/s], lo cual le permite comprimir el resorteen un metro. Si no existe roce, ¿cuál es la constante k del resorte?
Solución
Por tratarse de un sistema conservativo: E = cte.
Toda la energía mecánica inicial del carro será utilizada para lograr que elresorte se comprima 1[m] (Energía Elástica).
1. Trabajo: Si un cuerpo de cierta masa experimenta un desplazamientobajo la acción de una fuerza, entonces se habla del trabajo realizado por lafuerza.
2. Potencia: Es el tiempo en el que se efectúa un trabajo.
3. Energía cinética: Es la energía que tienen los cuerpos que están enmovimiento con una cierta velocidad distinta de cero, se designa por EC y sedefine como:
4. Energía potencial: Es la energía que poseen los cuerpos por suposición. Puede ser gravitatoria (mgh) o elástica
5. Energía mecánica: Es la suma de la energía potencial y cinética de uncuerpo.
CAPÍTULO 4: EL SONIDO Y LA LUZ
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Reconocer que el comportamiento de objetos muy diversos (cuerdas,láminas, aire en cavidades, los diferentes instrumentos musicales) puedetener un origen común (la vibración).• Manejar magnitudes básicas utilizando relaciones matemáticaselementales para obtener, ya sea sus órdenes de magnitud en determinadascircunstancias,o sus valores exactos (por ejemplo, relación entre velocidad,frecuencia y longitud de onda).• Reconocer que en algunas circunstancias un fenómeno se puedecomprender como la suma de componentes (por ejemplo, el tono de unanota musical).• Reconocer que la comprensión de fenómenos naturales (como lanaturaleza del sonido) es el origen de muchas tecnologías (por ejemplo,aplicacionesdel ultrasonido en medicina).• Relacionar fenómenos muy diversos del sonido a través de conceptosunificadores como el de onda.
El sonido y la música son parte fundamental de la experiencia humana. Lagente primitiva producía sonido no sólo mediante sus voces sino también contambores y pitos. Algunos animales, para lograr sobrevivir, emplean sonidoscon frecuencias tan altas que resultan inaudibles para los humanos.
“El viento que pasa sobre un campo de mieses determina un movimiento enforma de onda, que se difunde a lo largo de toda su extensión. Podemosdistinguir en este caso dos movimientos: el de propagación de la onda y elmovimiento de cada una de las espigas, las cuales ejecutan sólo pequeñosdesplazamientos de vaivén, es decir, pequeñas oscilaciones” (La física,aventura del pensamiento, Einstein – Infeld).
Los fenómenos ondulatorios son de extraordinaria utilidad en la descripcióny análisis de un vasto campo de procesos naturales.
Así, la luz, el sonido, las telecomunicaciones, la televisión, las ondassuperficiales en líquidos, la luz de las estrellas, los colores del arco iris, elsonido que emite una cuerda de guitarra, etc., no tendrían explicaciónsatisfactoria sin el aporte de las interpretaciones ondulatorias. Incluso en elcampo de la física atómica y nuclear es posible encontrar numerososfenómenos de carácter ondulatorio. Todo movimiento ondulatorio se caracterizapor ser portador de energía, la que puede alcanzar distancias apreciables. Deacuerdo con las direcciones de propagación, las ondas pueden ser:unidimensionales (ondas en cuerdas), bidimensionales (ondas superficiales) ytridimensionales (ondas sonoras y luminosas).
1. Vibración y sonido
1.1 Oscilaciones
a. Definición
Se dice que una partícula o cuerpo está oscilando cuando efectúa unmovimiento de vaivén (ida y vuelta) en torno a una posición de equilibrio.
Ejemplos: Las líneas en A representan las respectivas posiciones centraleso de equilibrio.
Albert Einstein (1879 – 1955)Físico matemático, nacido en Ulm (Alemania). Estudió en Munich, en Italia y
en Suiza. Hasta 1933 fue director del Instituto de física Kaiser Wilhelm de Berlín;luego, a causa de la política racial de Hitler, se trasladó a Norteamérica, dondefue profesor de la Universidad de Princeton y se convirtió en ciudadanonorteamericano en 1940. Es famoso por sus estudios de física que dieron ungiro decisivo a las modernas investigaciones. En 1921 recibió el premio Nobel deFísica. Su teoría llamada “de la relatividad”, se refiere a la equivalencia entre lamasa y la energía y se expresa con la fórmula:
E = mc2
Donde E es la energía; m la masa y c la velocidad de la luz.
b. Elementos que permiten describir una oscilación
- Crestas y valles: Los puntos más elevados verticalmente hacia arriba dela posición de equilibrio del péndulo corresponden a las crestas o montes dela onda senoidal mientras que los más bajos se denominan valles.
- Elongación (s): Posición de la partícula con respecto a la posición deequilibrio. Puede ser positiva o negativa, según el sentido elegido comopositivo.
- Amplitud (A): La distancia vertical entre la cresta y la posición deequilibrio corresponde a la amplitud (A). Es el máximo valor que adopta laelongación.
- Longitud de Onda (λ): Longitud horizontal que abarca un ciclo o longitudentre dos valles o dos crestas o tres nodos consecutivos.
- Período (T): Tiempo que tarda la partícula en describir la oscilacióncompleta.
- Frecuencia (ƒ): Es el número de oscilaciones que describe la partícula encada unidad de tiempo.
Donde: n = número de oscilaciones t = tiempo
Si n =1 ⇒ t = T
La unidad de medida más usada es el Hertz:
• La frecuencia en el S.I., está asociada al Hertz (Hz) en honor al físicoalemán Heinrich Hertz (1857-1894) quien descubrió el efecto fotoeléctrico y en1887 confirmó experimentalmente la existencia de las ondas de radio y sucomportamiento.
• Si la frecuencia es muy alta, se puede expresar en múltiplos del Hertz:KiloHertz [kHz], MegaHertz [MHz], GigaHertz [GHz], etc.
1 [THz] = 1012 [Hz]1 [GHz] = 109 [Hz]1 [MHz] = 106 [Hz]1 [kHz] = 103 [Hz]1 [Hz] = [1/s]
Dos péndulos de igual longitud tienen el mismo período, sean cuales seansus masas.
Galileo, al observar las oscilaciones en una lámpara colgada en laCatedral de Pisa, llegó a la conclusión de que el período de oscilación de unpéndulo de longitud L no depende de su peso sino de su longitud y de laaceleración de gravedad g. Analíticamente:
c. Oscilación armónica
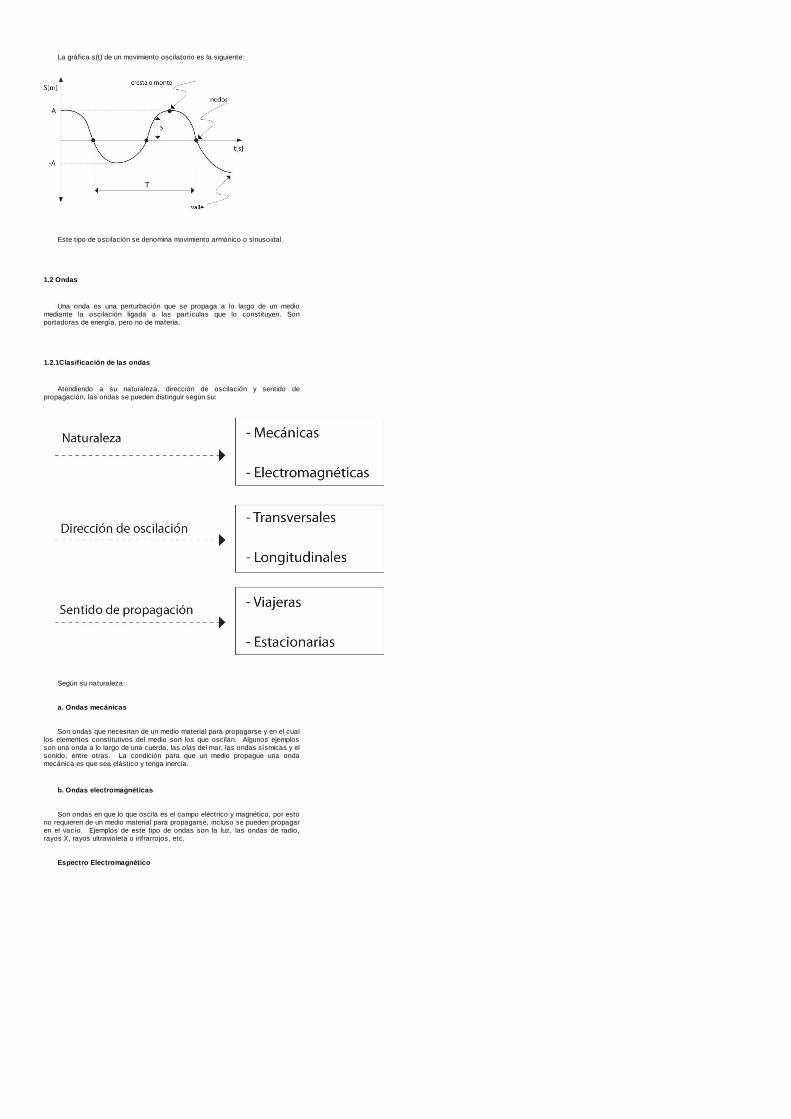
La gráfica s(t) de un movimiento oscilatorio es la siguiente:
Este tipo de oscilación se denomina movimiento armónico o sinusoidal.
1.2 Ondas
Una onda es una perturbación que se propaga a lo largo de un mediomediante la oscilación ligada a las partículas que lo constituyen. Sonportadoras de energía, pero no de materia.
1.2.1Clasificación de las ondas
Atendiendo a su naturaleza, dirección de oscilación y sentido depropagación, las ondas se pueden distinguir según su:
Según su naturaleza:
a. Ondas mecánicas
Son ondas que necesitan de un medio material para propagarse y en el cuallos elementos constitutivos del medio son los que oscilan. Algunos ejemplosson una onda a lo largo de una cuerda, las olas del mar, las ondas sísmicas y elsonido, entre otras. La condición para que un medio propague una ondamecánica es que sea elástico y tenga inercia.
b. Ondas electromagnéticas
Son ondas en que lo que oscila es el campo eléctrico y magnético, por estono requieren de un medio material para propagarse, incluso se pueden propagaren el vacío. Ejemplos de este tipo de ondas son la luz, las ondas de radio,rayos X, rayos ultravioleta o infrarrojos, etc.
Espectro Electromagnético
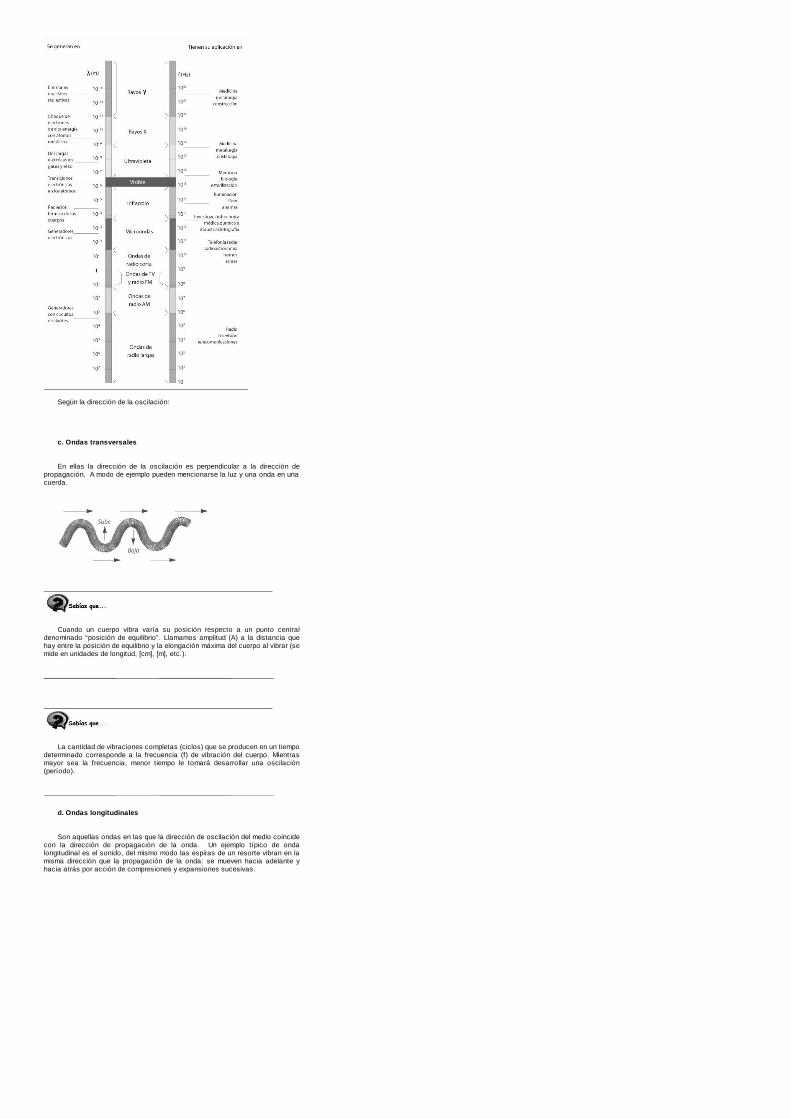
Según la dirección de la oscilación:
c. Ondas transversales
En ellas la dirección de la oscilación es perpendicular a la dirección depropagación. A modo de ejemplo pueden mencionarse la luz y una onda en unacuerda.
Cuando un cuerpo vibra varía su posición respecto a un punto centraldenominado “posición de equilibrio”. Llamamos amplitud (A) a la distancia quehay entre la posición de equilibrio y la elongación máxima del cuerpo al vibrar (semide en unidades de longitud, [cm], [m], etc.).
La cantidad de vibraciones completas (ciclos) que se producen en un tiempodeterminado corresponde a la frecuencia (f) de vibración del cuerpo. Mientrasmayor sea la frecuencia, menor tiempo le tomará desarrollar una oscilación(período).
d. Ondas longitudinales
Son aquellas ondas en las que la dirección de oscilación del medio coincidecon la dirección de propagación de la onda. Un ejemplo típico de ondalongitudinal es el sonido, del mismo modo las espiras de un resorte vibran en lamisma dirección que la propagación de la onda: se mueven hacia adelante yhacia atrás por acción de compresiones y expansiones sucesivas.
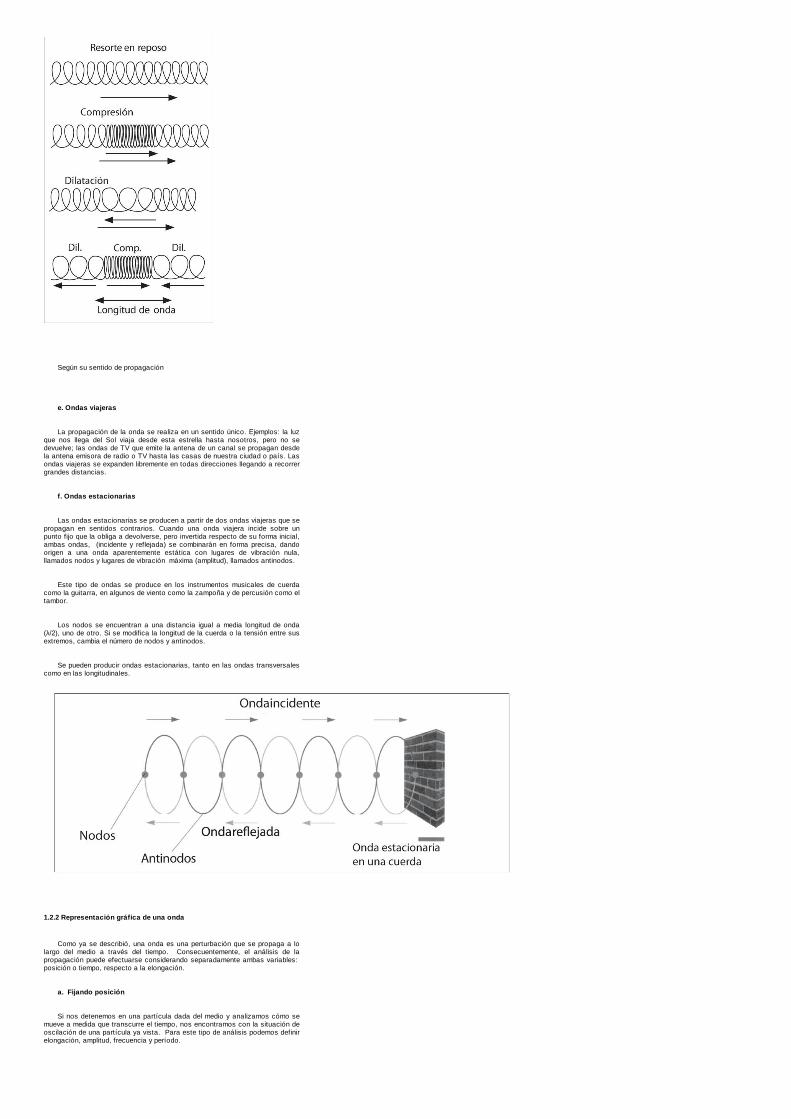
Según su sentido de propagación
e. Ondas viajeras
La propagación de la onda se realiza en un sentido único. Ejemplos: la luzque nos llega del Sol viaja desde esta estrella hasta nosotros, pero no sedevuelve; las ondas de TV que emite la antena de un canal se propagan desdela antena emisora de radio o TV hasta las casas de nuestra ciudad o país. Lasondas viajeras se expanden libremente en todas direcciones llegando a recorrergrandes distancias.
f. Ondas estacionarias
Las ondas estacionarias se producen a partir de dos ondas viajeras que sepropagan en sentidos contrarios. Cuando una onda viajera incide sobre unpunto fijo que la obliga a devolverse, pero invertida respecto de su forma inicial,ambas ondas, (incidente y reflejada) se combinarán en forma precisa, dandoorigen a una onda aparentemente estática con lugares de vibración nula,llamados nodos y lugares de vibración máxima (amplitud), llamados antinodos.
Este tipo de ondas se produce en los instrumentos musicales de cuerdacomo la guitarra, en algunos de viento como la zampoña y de percusión como eltambor.
Los nodos se encuentran a una distancia igual a media longitud de onda(λ/2), uno de otro. Si se modifica la longitud de la cuerda o la tensión entre susextremos, cambia el número de nodos y antinodos.
Se pueden producir ondas estacionarias, tanto en las ondas transversalescomo en las longitudinales.
1.2.2 Representación gráfica de una onda
Como ya se describió, una onda es una perturbación que se propaga a lolargo del medio a través del tiempo. Consecuentemente, el análisis de lapropagación puede efectuarse considerando separadamente ambas variables: posición o tiempo, respecto a la elongación.
a. Fijando posición
Si nos detenemos en una partícula dada del medio y analizamos cómo semueve a medida que transcurre el tiempo, nos encontramos con la situación deoscilación de una partícula ya vista. Para este tipo de análisis podemos definirelongación, amplitud, frecuencia y período.
b. Fijando tiempo
Otra forma alternativa de estudiar la situación consiste en analizar la formadel medio a medida que nos movemos a través de él en algún instante fijo deltiempo. Esto corresponde a sacar una “foto” de la onda y ver su forma endistintos puntos del medio.
Si cada partícula está oscilando armónicamente, entonces esta fotomostrará un perfil sinusoidal como el mostrado a continuación (suponiendo unaonda transversal):
1.2.3 Velocidad de propagación
Corresponde a la velocidad con que avanza la onda en el sentido depropagación. Se denota por v y su valor se obtiene del producto entre lafrecuencia de la onda y la longitud de onda.
Para una cuerda, por ejemplo, podemos ver que cuanto más gruesa sea(con mayor masa m por unidad de longitud L) tanto menor será la rapidez de laonda que se propague a través de ella. Esta rapidez también depende de latensión (T) a la cual se encuentra sometida dicha cuerda; cuanto más estiradase halle, mayor será la rapidez de propagación de la onda a través de la cuerda.Analíticamente:
Ejemplos:
1. Se lanza una piedra en el centro de una piscina circular de 5 [m] dediámetro. Si la onda choca con los bordes de la piscina 5 [s] después y cada 0,2[s] dejando una marca de agua 10 [cm] más arriba del nivel normal, calcular:
a. Frecuencia.b. Período.c. Amplitud máxima.d. Velocidad de propagación de la onda resultante.e. Longitud de onda.
Solución
2. Una cuerda uniforme e inextensible de masa 0,3 [kg] y longitud de 6 [m]sostiene una masa de 2 [kg], como indica la figura adjunta. Al generar un pulsoen la cuerda tensa, ¿cuál será su rapidez de propagación en la cuerda?
Solución
La tensión T de la cuerda corresponde al peso asociado a la masa de 2 [kg]que sostiene suspendida.
T = mg = 2 · 10 = 20 [N]
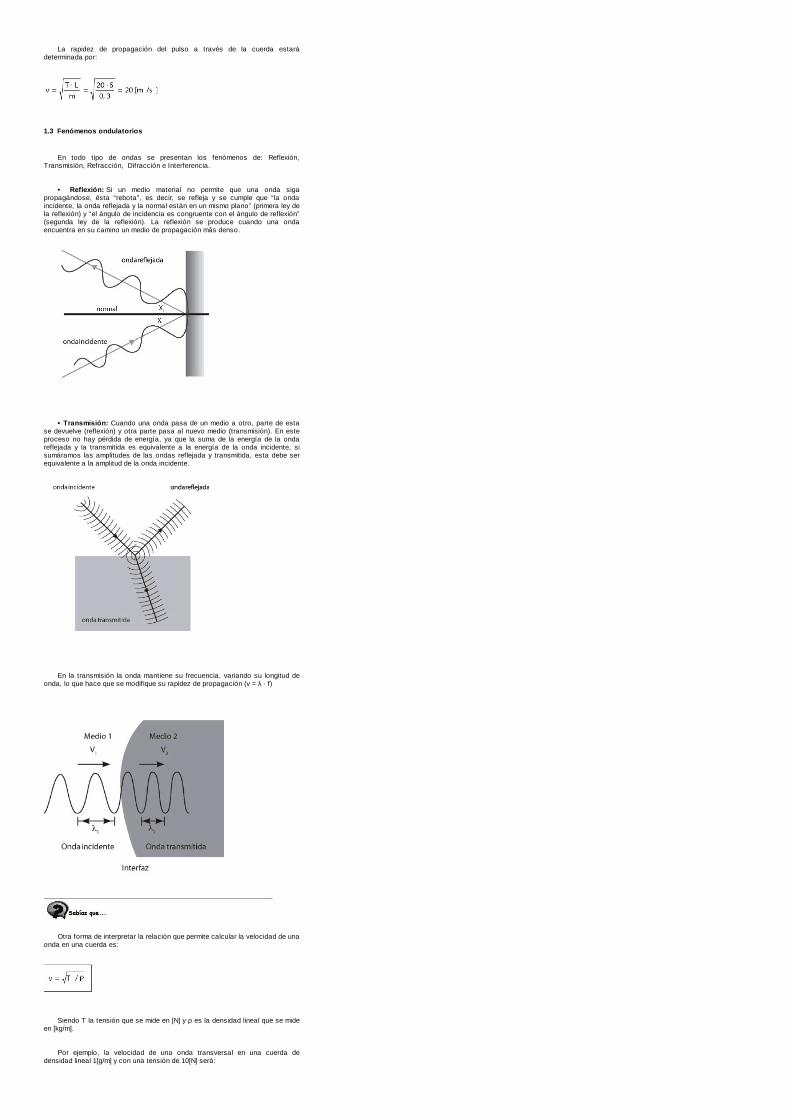
La rapidez de propagación del pulso a través de la cuerda estarádeterminada por:
1.3 Fenómenos ondulatorios
En todo tipo de ondas se presentan los fenómenos de: Reflexión,Transmisión, Refracción, Difracción e Interferencia.
• Reflexión: Si un medio material no permite que una onda sigapropagándose, ésta “rebota”, es decir, se refleja y se cumple que “la ondaincidente, la onda reflejada y la normal están en un mismo plano” (primera ley dela reflexión) y “el ángulo de incidencia es congruente con el ángulo de reflexión”(segunda ley de la reflexión). La reflexión se produce cuando una ondaencuentra en su camino un medio de propagación más denso.
• Transmisión: Cuando una onda pasa de un medio a otro, parte de estase devuelve (reflexión) y otra parte pasa al nuevo medio (transmisión). En esteproceso no hay pérdida de energía, ya que la suma de la energía de la ondareflejada y la transmitida es equivalente a la energía de la onda incidente, sisumáramos las amplitudes de las ondas reflejada y transmitida, esta debe serequivalente a la amplitud de la onda incidente.
En la transmisión la onda mantiene su frecuencia, variando su longitud deonda, lo que hace que se modifique su rapidez de propagación (v = λ · f)
Otra forma de interpretar la relación que permite calcular la velocidad de unaonda en una cuerda es:
Siendo T la tensión que se mide en [N] y ρ es la densidad lineal que se mideen [kg/m].
Por ejemplo, la velocidad de una onda transversal en una cuerda dedensidad lineal 1[g/m] y con una tensión de 10[N] será:

La rapidez de propagación, además, depende de la “temperatura” y la“densidad del medio”. Cuanto mayor es la temperatura del medio, mayor es larapidez de propagación del sonido; y a mayor densidad del medio mayor rapidezde propagación. En verano, el sonido se propaga más rápido que en invierno. Enel agua el sonido se propaga mucho más rápido que en el aire.
• Refracción: Cuando una onda pasa de un medio a otro, generalmentecambia su dirección de propagación (esto no ocurre sólo cuando incideperpendicularmente a la superficie de contacto de los dos medios).
• Difracción: Si una onda es interrumpida parcialmente por un obstáculo ensu dirección de propagación, la onda puede rodearlo y seguir propagándose.Cuando hay dos obstáculos que delimitan un pequeño espacio, las ondastambién pueden pasar.
• Superposición e Interferencia: Muchos fenómenos ondulatoriosinteresantes en la naturaleza no pueden describirse mediante una sola onda enmovimiento. En lugar de ello es necesario analizar formas de onda complejas enfunción de una combinación de diferentes ondas viajeras. Para analizar dichascombinaciones de onda se utiliza el principio de superposición de ondas.
El principio de superposición establece que si dos o más ondas viajeras semueven a través de un medio, la función de onda resultante en cualquier puntoes la suma algebraica de las funciones de onda individuales.
Dos ondas viajeras pueden pasar una a través de otra sin alterarse.Decimos que cuando dos o más ondas ocupan la misma posición en un ciertomomento, necesariamente se interfieren. A este fenómeno de interacción entreondas se denomina interferencia.
Supongamos dos pulsos de amplitud y1 e y2 viajando en una cuerda tensauno al encuentro del otro, ambos en sentido “y” positivo. Al momento deinterferirse sus amplitudes respectivas se adicionan, de tal forma que la ondainstantánea resultante en dicho punto presentará una elongación máxima (y1 +y2) mayor a las amplitudes individuales de cada uno de los pulsos originales. Eneste caso hablaremos de interferencia constructiva.
- Interferencia constructiva
Consideremos ahora, dos pulsos de amplitud y e y que viajan también uno alencuentro del otro, pero en sentidos opuestos de “y”, como indica la siguientefigura. En este caso, cuando los pulsos se superpongan, la onda instantánearesultante en dicho punto presentará una amplitud (y1 - y2). En este casohablaremos de interferencia destructiva. Nuevamente ambos pulsos seatraviesan mutuamente para seguir su propagación individual.
- Interferencia destructiva
Dos ondas que se superponen, necesariamente se interfieren
La interferencia es un fenómeno característico de todo movimientoondulatorio, principalmente entre ondas de una misma naturaleza eindependiente del tipo de onda.
2. Ondas y sonido
Cuando los cuerpos vibran comprimen el medio elástico de su entorno,produciendo pequeños cambios de presión que generan una serie de pulsos decompresión y rarefacción (dilatación) que forma una onda sonora, la que setransmite a través del aire alejándose de la fuente y penetrando en nuestrosoídos.
Al paso de una onda cada partícula del medio realiza solamente vibracionesu oscilaciones; luego, los conceptos de amplitud, frecuencia, período, longitudde onda y velocidad de propagación estudiadas para las ondas son aplicablestambién para el sonido.
Todos los sonidos son generados por vibraciones de objetos materiales. Enun piano, un violín o una guitarra es una cuerda vibrante la que produce lasondas sonoras. En un saxofón los produce una lengüeta vibrante, en una flauta,una columna de aire ondulante que entra por la boquilla del instrumento. Nuestravoz proviene de las vibraciones periódicas de nuestras cuerdas vocales, las queagitan el aire que circula a través de ellas.
El sonido se propaga mejor en los medios mas densos, como los sólidos olíquidos que en el aire. La velocidad de propagación del sonido depende de laelasticidad del medio material, que se define como su capacidad para recuperarsu forma inicial. En un medio elástico, los átomos están muy juntos, por lo cualreaccionan en forma rápida al movimiento mutuo, transmitiendo la energía de lasondas con muy pocas pérdidas.
Al pulsar las cuerdas de una guitarra puedes sentir en tus dedos lasvibraciones y escuchar el sonido producido por ellas.
En lenguaje musical, a un sonido grave se le llama “Bajo” y a un agudo“Alto”.
En términos generales, los hombres emiten sonidos entre 110 [Hz] y 160 [Hz]y las mujeres 200 [Hz] y 300 [Hz].
Se tienen casos especiales en los cantantes de ópera. En los varones, losbajos emiten sonido entre 110 [Hz] y 600 [Hz]; en las voces femeninas, lassopranos emiten sonido entre 250 [Hz] y 1.400 [Hz].

Vibraciones y sonido
Los fenómenos sonoros están relacionados con las vibraciones de loscuerpos materiales.Para hacer vibrar un objeto se emplean tanto procedimientosmecánicos, como eléctricos y magnéticos.
Los tres elementos básicos para la existencia del sonido son:
• El objeto vibrante o fuente sonora, que puede ser una cuerda, una láminao las partículas del aire en una cavidad.
• El medio, que puede ser sólido (madera, metal, cuero, plástico, nylon,etc.), líquido o gaseoso como el aire.
• El receptor, que puede ser nuestro oído o algún instrumento que registreel sonido.
La naturaleza longitudinal de las ondas sonoras se pone de manifiesto porel hecho de que los fluidos, tanto líquidos como gases son capaces detransmitirlas; por medio de compresiones y enrarecimientos sucesivos , esdecir, variaciones de presión periódicas.
2.1 Características del sonido
La percepción del sonido involucra tres características fundamentales:intensidad, tono y timbre.
a . Cuando hablamos de sonidos agudos o graves nos referimos a laaltura o tono del sonido, lo que depende de la frecuencia con que vibra elobjeto vibrante, obteniéndose a mayor frecuencia un sonido más agudo, y amenor frecuencia un sonido más grave. Si se escucha una orquesta desde lejos,resaltan más los sonidos graves que los agudos, ya que las frecuencias bajasse transmiten con mayor eficacia (las frecuencias más altas se pierden con ladistancia).
El rango de audición humano es de 20 [Hz] a 20.000 [Hz], aproximadamente.Sus cuerdas vocales emiten sonidos entre 85 – 1400 [Hz]. Los sonidos cuyafrecuencia sobrepasa los 20.000 [Hz] dejan de ser audibles para el oídohumano. Se les da el nombre de Ultrasonidos. Por ejemplo, el murciélago emitehasta 120.000 [Hz]. Los sonidos cuya frecuencia es inferior a 20 [Hz] tampocoes audible para el ser humano. Se les da el nombre de Infrasonidos.
En medicina y en la industria la aplicación del ultrasonido reviste una granimportancia. Por ejemplo, los instrumentos de ultrasonido detectan y emitensonidos entre 3.500.000 [Hz] y 7.500.000 [Hz].
b. Cuando hablamos de sonidos intensos y débiles, nos referimos a laIntensidad del sonido. Ésta depende de la Amplitud de la vibración, siendo unsonido más intenso cuando la amplitud es mayor y un sonido más débil cuandola amplitud es menor.
La intensidad del sonido se mide en una unidad llamada decibel, quecorresponde a la décima parte de otra unidad mayor llamada Bel, en honor alinventor norteamericano Alexander Graham Bell, quien en 1876 investigando condispositivos para corregir la sordera inventó el teléfono.
Está comprobado que la intensidad es inversamente proporcional alcuadrado de la distancia que nos separa de la fuente sonora; lo que significaque si nos alejamos el doble de distancia, la intensidad del sonido disminuye a lacuarta parte.
Una importante y conocida técnica en la que se aplica ultrasonido es laecotomografía.

Las ondas producidas por un terremoto son infrasónicas.
c. El timbre es otra cualidad del sonido. Distingue entre sonidos de igualaltura e intensidad producidos por fuentes sonoras diferentes. Si tocamos unacierta nota de un piano, y si la misma nota (de la misma frecuencia) fueseemitida con la misma intensidad por un violín, podríamos distinguir una de laotra; es decir, podemos decir claramente cuál nota fue la que emitió el piano, ycuál emitió el violín. Decimos, entonces, que estas notas tienen un “timbre”diferente.
Esto se debe a que la nota emitida por un piano es el resultado de lavibración no única de la cuerda accionada, sino también de algunas otraspartes del piano (madera, columna de aire, otras cuerdas, etc.) las cualesvibran junto con ella. Así pues, la onda sonora emitida tendrá una forma propia,característica del piano. De la misma manera, la onda emitida por un violín es elresultado de vibraciones características de este instrumento y, por ello,presenta una forma diferente a la de la onda emitida por un piano.
Lo que se dice para el violín y el piano se aplica también a los demásinstrumentos musicales: la onda sonora resultante que cada uno de ellos emite,y que corresponde a una nota determinada, tiene una forma propia,característica del instrumento; es decir, cada uno de ellos posee su propiotimbre. La voz de las personas también tiene un timbre propio, porque la formade la onda sonora que producen está determinada por característicaspersonales. Éste es el motivo por el cual podemos identificar a una persona porsu voz.
Aunque todos los instrumentos de una orquesta interpreten una mismamelodía, cada uno de ellos emite el sonido con su propio timbre, es decir, juntoal sonido principal hay una serie de armónicos que caracterizan a cada uno delos instrumentos. Lo mismo sucede con nuestra voz. Tal como cada uno tienesu propia huella digital , de la misma forma cada uno de nosotros posee untimbre único de voz.
Diferencia entre sonido y ruido
El sonido se origina por variaciones periódicas (coherentes) de la presión,lo que ofrece un patrón de oscilación regular, pues existe una concordanciaentre el tono fundamental y sus armónicos tanto en intensidad como enfrecuencia.
El ruido, en cambio, no posee esta característica y, por lo tanto, el tonoobtenido es irregular e incoherente entre su tono fundamental y sus armónicos,aunque único, por lo tanto irreproducible idénticamente. Dos vidrios iguales noemiten el mismo sonido al romperse. Produce ruido una madera que cruje y separte, un libro que se cae al suelo, una motocicleta al partir, etc.
2.2 Fenómenos ondulatorios asociados al sonido

a. Reflexión
El sonido se refleja en las superficies, cuando al chocar con ellas (incidirsobre ellas) se desvía desplazándose por el mismo medio de origen. LaReflexión es más eficaz cuanto mayor es la densidad de la superficie. Para queuna superficie actúe como reflectora es necesario que absorba una fracciónmuy reducida del sonido que llega a ella.
Los fenómenos conocidos como Eco y Reverberación son producidos por laReflexión del sonido.
El Eco se produce al reflejarse el sonido, luego de incidir sobre unobstáculo. Esta consecuencia de la reflexión de las ondas sonoras se producecuando oímos un sonido determinado y , poco después, las ondas reflejadas deéste.
Para comprender en qué circunstancias se produce, hemos de tener encuenta que nuestro oído sólo diferencia dos sonidos si el intervalo de tiempoque transcurre entre la percepción de uno y otro es, al menos, de una décima desegundo. En este tiempo, la distancia recorrida por las ondas sonoras en el aireserá:
Δs = v ⋅ ΔtΔs = 340 [m/s] ⋅ 0,1 [s] = 34 [m]
Por consiguiente, para oír nuestro propio eco la superficie en que se reflejenlas ondas debe estar situada al menos a 17 [m] de nosotros (ida y vuelta).
El sonar es un dispositivo basado en la reflexión de los ultrasonidos. Esteaparato es semejante al radar, y , como su nombre lo indica, hace uso de ondassonoras, en vez de ondas de radio. Se utiliza básicamente en la navegación,para localizar cardúmenes de peces, establecer la profundidad del mar o paradescubrir objetos que están en el agua.
La reverberación consiste en la prolongación del sonido debido asucesivas reflexiones. Los sonidos percibidos por un receptor se tardan unpoco debido a la percepción de las ondas reflejadas que llegan como sonidossubsiguientes desde muchos puntos del local.
Se denomina tiempo de reverberación al intervalo de tiempo que transcurreentre el instante que deja de emitirse un sonido y aquel en que su intensidad es106 veces menor. Este tiempo es directamente proporcional al volumen del locale inversamente proporcional a la absorción total de éste.
Si la reverberación se elimina del todo o si disminuye excesivamente, elsonido llega demasiado ”seco” y no es agradable. Si la reverberación esexcesiva, es decir, si los sonidos se alargan demasiado, éstos se deforman y laaudición es confusa. El tiempo óptimo de reverberación de un local depende deluso concreto a que se destine y suele oscilar entre uno y dos segundos, valorsuficiente para alargar el tiempo de excitación del oído sin llegar a ser confuso.
Las soluciones para la buena acústica de un local conduce, como se ve,por un lado, a revestir las paredes de materiales absorbentes del sonido y, porotro, a dar una forma geométrica adecuada a las paredes y al techo del local demodo que se atenúen los sonidos reflejados.
b. Transmisión
Los sonidos se transmiten a través de diferentes medios, tanto sólidos,como líquidos y gaseosos. La transmisión es más eficaz en “Medios másdensos” y para frecuencias más bajas.
El Estetoscopio, instrumento usado por los médicos para auscultar a suspacientes, es un ejemplo de transmisión de sonido a través de un tubo.
La velocidad del sonido en el aire se puede calcular en relación a latemperatura de la siguiente manera:
donde T está a la temperatura en grados Celsius.

c. Absorción
El sonido, al encontrarse con una superficie dura, se refleja, pero si seencuentra con cortinas u otros materiales “blandos” se absorbe total oparcialmente. Si el sonido es agudo o de frecuencia alta y el material es“blando”, mayor es la absorción.
d. Refracción
El fenómeno de la refracción es un cambio en la velocidad de propagaciónde la onda, cambio asociado al paso de un medio a otro de diferente naturalezao de diferentes propiedades. Este cambio de velocidad da lugar a un cambio enla dirección de propagación de la onda. Como consecuencia, la onda refractadase desvía un cierto ángulo respecto de la incidente. La propagación del sonidoen el aire sufre refracciones, dado que su temperatura no es uniforme. En un díasoleado las capas de aire próximas a la superficie terrestre están más calientesque las altas y la velocidad del sonido, que aumenta con la temperatura, esmayor en las capas bajas que en las altas. Ello da lugar a que el sonido, comoconsecuencia de la refracción, se desvía hacia arriba. En esta situación lacomunicación entre dos personas suficientemente separadas se veríadificultada. El fenómeno contrario ocurre durante las noches, ya que la Tierra seenfría más rápidamente que el aire. Ver figura.
La frecuencia no cambia al pasar una onda de un medio a otro, sólo sealtera su longitud de onda.
e. Difracción
Una persona A al lado de un muro, puede ser escuchada por una persona Bcolocada detrás del mismo, porque las ondas sonoras emitidas por A, debido ala difracción, rodean el obstáculo y llegan al oído de B
f. Resonancia
El fenómeno de resonancia consiste en el refuerzo de la amplitud devibración de un cuerpo por el acoplamiento de otra vibración de frecuencia muysimilar. Esto explica porque todos los cuerpos poseen su propia frecuencianatural de vibración que depende de su tamaño, de sus características y delmedio en el que se encuentran.
Si un cuerpo que vibra se acopla a otro cuerpo vibrante, cuya frecuencianatural es similar, la amplitud se refuerza y puede llegar a romper la estructuraque no resiste la vibración. Esta es la razón por la que algunos objetos decristal se rompen al resonar con determinadas ondas sonoras, y también es elmotivo por el que muchas veces los trenes disminuyen su rapidez al pasar porun puente colgante o los soldados en marcha “rompan el paso”.
Los soldados rompen filas al cruzar un puente para evitar que la frecuenciade su marcha pueda entrar en resonancia mecánica con la frecuencia naturaldel puente, derribándolo. Como ocurrió en Francia en abril de 1850 al paso deuna tropa en formación en el puente de La Maine.
Se comprueba también que, si detenemos las vibraciones del primeroseguimos oyendo el sonido de la vibración del segundo.
Si se comienza a mover uno de los columpios, los demás se empezarán amover con la misma frecuencia, entran en resonancia.

Un oscilador puede mantener una gran amplitud si se le entrega energía enpequeñas cantidades pero con la frecuencia apropiada: la frecuencia deresonancia. En 1940 el puente de Tachoma Narrows, Estados Unidos, no pudosoportar las elevadas amplitudes al entrar en resonancia con los vientosnormales de sólo 70 [km./h] que circulaban a través de él. Tenía sólo 4 mesesde inaugurado.
Veamos una experiencia en que se manifiesta la resonancia acústica.Supongamos que colocamos dos diapasones idénticos a cierta distancia entresí. Al golpear uno de ellos, vibra emitiendo un sonido, y se observa que el otrodiapasón empieza a vibrar con igual frecuencia al ser alcanzado por las ondassonoras del primero.
Diapasonas oscilando por resonancia.
g. Efecto Doppler
La frecuencia con que se percibe un sonido depende de la velocidad relativaentre quien lo emite y quien lo escucha.
Al escuchar la sirena de una ambulancia, la percibimos de diferente maneracuando el móvil se acerca que cuando se aleja. Este cambio de frecuenciasdebido al movimiento de la fuente o al del receptor se denomina efecto Doppleren honor al físico austríaco Ch. J. Doppler (1803-1853) quien fue el primero eninterpretarlo en 1842.
Si la fuente emisora se acerca, aumenta la frecuencia de las ondas,percibiéndose, por tanto, un sonido más agudo y, si se aleja, disminuye lafrecuencia, escuchándose un sonido más grave. Este cambio de sonido sepercibe sólo si la fuente emisora está en movimiento.
Cuando la fuente y el observador se mueven uno hacia el otro la frecuenciaque escucha el observador es más alta que la frecuencia de la fuente. Cuandola fuente y el observador se alejan una del otro, la frecuencia escuchada es másbaja que la frecuencia de la fuente.
En síntesis, el Efecto Doppler establece que cuando la distancia relativaentre la fuente sonora y el observador está variando, la frecuencia del sonidopercibida por éste es distinta de la frecuencia del sonido emitido por la fuente.
En esta expresión, los signos superiores (+ vR y – vm óvi l ) se refieren almovimiento respectivo de acercamiento entre los móviles. Los signos inferiores(–vR y + vm óvi l ) se refieren al alejamiento entre ellos.
Donde:
f ’: frecuencia que percibe el receptor

f0 : frecuencia que emite el móvil, en reposovs: velocidad de propagación del sonido en el mediovR: velocidad del receptor del sonido
Las aplicaciones del efecto Doppler son variadas. En Astronomía se loutiliza para determinar la velocidad con que las galaxias se alejan o seaproximan a la Tierra, en Aeronavegación permite determinar la velocidad conque se acerca o se aleja un avión respecto a la torre de control, en Medicinapermite medir la presión sistólica sanguínea, determinar el estado de injertosarteriales, la condición de las arterias y venas y el estado del feto durante elembarazo. En carreteras Carabineros calcula la rapidez de un auto en base aun dispositivo que también aplica en efecto.
Ejemplo
Una ambulancia viaja por una autopista a una velocidad de 33,5 [m/s]. Susirena emite un sonido a una frecuencia de 400 [Hz].
¿Cuál es la frecuencia aproximada percibida por un automovilista que viajaa 24,6 [m/s] en sentido opuesto a medida que su auto: (vs = 343 [m/s], en el aire)
a. se acerca a la ambulancia?b. se aleja de ésta?
Solución
2.3 El oído
2.3.1 Recepción del sonidoEl oído, a diferencia de otros sentidos, trabaja aún mientras dormimos.
Nuestro sentido de la audición tiene una estructura tal que le permite actuareficazmente para captar, amplificar y decodificar la información que nuestrocerebro distinguirá como el canto de un ave o la bocina de un auto, la intensidadde un susurro o la de un avión despegando; un sonido proveniente de nuestraizquierda o derecha aun cuando no lo vemos. El oído cumple en el organismouna doble función: la de captar los estímulos acústicos y la del equilibrio queinforma acerca de los cambios de posición del cuerpo en el espacio.
2.3.2 Estructura del oídoEl oído se divide en tres partes: oído externo, oído medio y oído interno.
a. Oído externoEstá formado por el pabellón auditivo y el conducto auditivo externo.
El pabellón auditivo externo se llama comúnmente oreja y su función escaptar y dirigir las ondas sonoras hacia el conducto auditivo. El conductoauditivo externo mide aproximadamente 2,5 [cm] y se encuentra enclavado en elhueso temporal, su función es conducir los sonidos hasta el tímpano, queamplifica los sonidos y los transmite al oído medio.
La estructura del oído externo permite captar las ondas sonoras y dirigirlasal interior del oído.
b. Oído medio
Es una cavidad llena de aire delimitada por el tímpano y por una láminaósea que contiene dos orificios cubiertos por membranas: la ventana oval y laventana redonda.
En el oído medio hay una estructura que se comunica con la porción nasalde la faringe, la trompa de Eustaquio. Su función es igualar la presión a amboslados del tímpano. Normalmente se encuentra cerrada y se abre durante ladeglución y el bostezo. Cuando el tímpano vibra, la onda sonora se transmitehacia la cadena de huesecillos (martillo, yunque y estribo) y a la ventana oval.
La disposición especial de cada una de las estructuras del oído medio esde gran relevancia para la transmisión de la onda sonora hacía el oído interno.
c. Oído interno
Está constituido por el laberinto óseo y el laberinto membranoso. Ellaberinto óseo se divide en tres regiones: los canales semicirculares, elvestíbulo y el caracol. Los dos primeros se relacionan con la función demantención del equilibrio, mientras que el caracol es un conducto enrollado quese relaciona con la audición.
El caracol está lleno de vellosidades, que se mueven en el fluido, enviandopequeños impulsos al cerebro a través del nervio coclear.
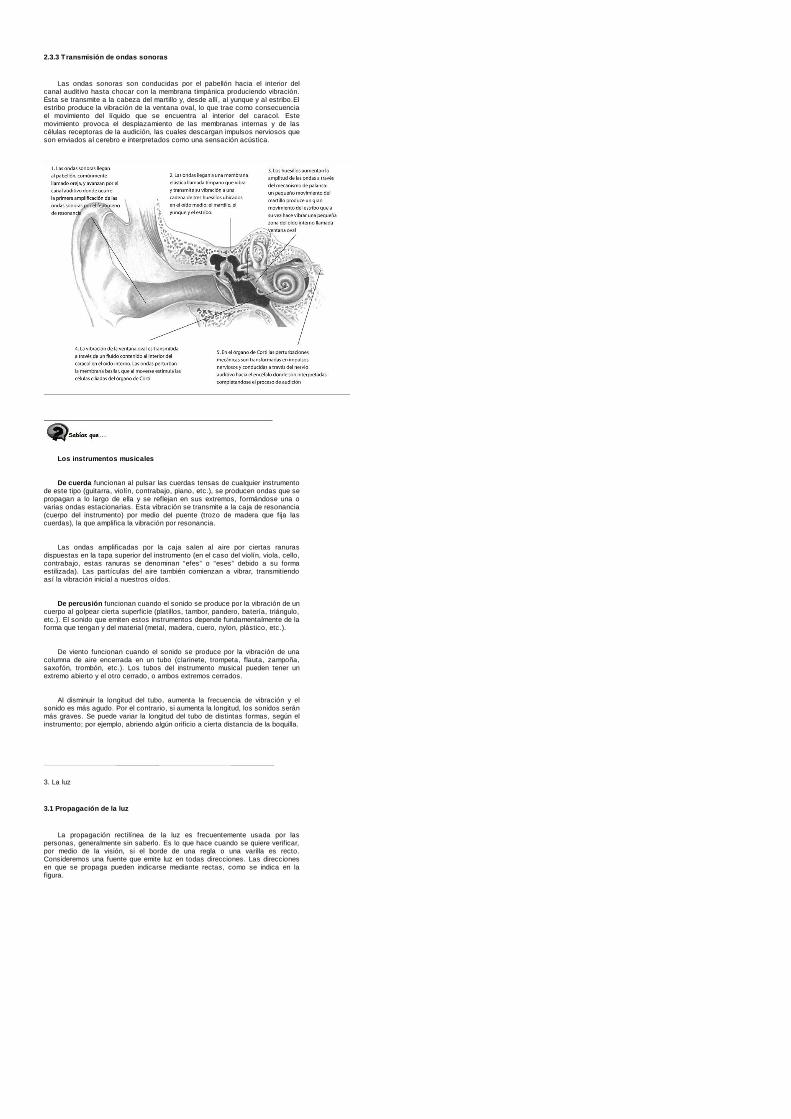
2.3.3 Transmisión de ondas sonoras
Las ondas sonoras son conducidas por el pabellón hacia el interior delcanal auditivo hasta chocar con la membrana timpánica produciendo vibración.Ésta se transmite a la cabeza del martillo y, desde allí, al yunque y al estribo.Elestribo produce la vibración de la ventana oval, lo que trae como consecuenciael movimiento del líquido que se encuentra al interior del caracol. Estemovimiento provoca el desplazamiento de las membranas internas y de lascélulas receptoras de la audición, las cuales descargan impulsos nerviosos queson enviados al cerebro e interpretados como una sensación acústica.
Los instrumentos musicales
De cuerda funcionan al pulsar las cuerdas tensas de cualquier instrumentode este tipo (guitarra, violín, contrabajo, piano, etc.), se producen ondas que sepropagan a lo largo de ella y se reflejan en sus extremos, formándose una ovarias ondas estacionarias. Esta vibración se transmite a la caja de resonancia(cuerpo del instrumento) por medio del puente (trozo de madera que fija lascuerdas), la que amplifica la vibración por resonancia.
Las ondas amplificadas por la caja salen al aire por ciertas ranurasdispuestas en la tapa superior del instrumento (en el caso del violín, viola, cello,contrabajo, estas ranuras se denominan “efes” o “eses” debido a su formaestilizada). Las partículas del aire también comienzan a vibrar, transmitiendoasí la vibración inicial a nuestros oídos.
De percusión funcionan cuando el sonido se produce por la vibración de uncuerpo al golpear cierta superficie (platillos, tambor, pandero, batería, triángulo,etc.). El sonido que emiten estos instrumentos depende fundamentalmente de laforma que tengan y del material (metal, madera, cuero, nylon, plástico, etc.).
De viento funcionan cuando el sonido se produce por la vibración de unacolumna de aire encerrada en un tubo (clarinete, trompeta, flauta, zampoña,saxofón, trombón, etc.). Los tubos del instrumento musical pueden tener unextremo abierto y el otro cerrado, o ambos extremos cerrados.
Al disminuir la longitud del tubo, aumenta la frecuencia de vibración y elsonido es más agudo. Por el contrario, si aumenta la longitud, los sonidos seránmás graves. Se puede variar la longitud del tubo de distintas formas, según elinstrumento; por ejemplo, abriendo algún orificio a cierta distancia de la boquilla.
3. La luz
3.1 Propagación de la luz
La propagación rectilínea de la luz es frecuentemente usada por laspersonas, generalmente sin saberlo. Es lo que hace cuando se quiere verificar,por medio de la visión, si el borde de una regla o una varilla es recto.Consideremos una fuente que emite luz en todas direcciones. Las direccionesen que se propaga pueden indicarse mediante rectas, como se indica en lafigura.
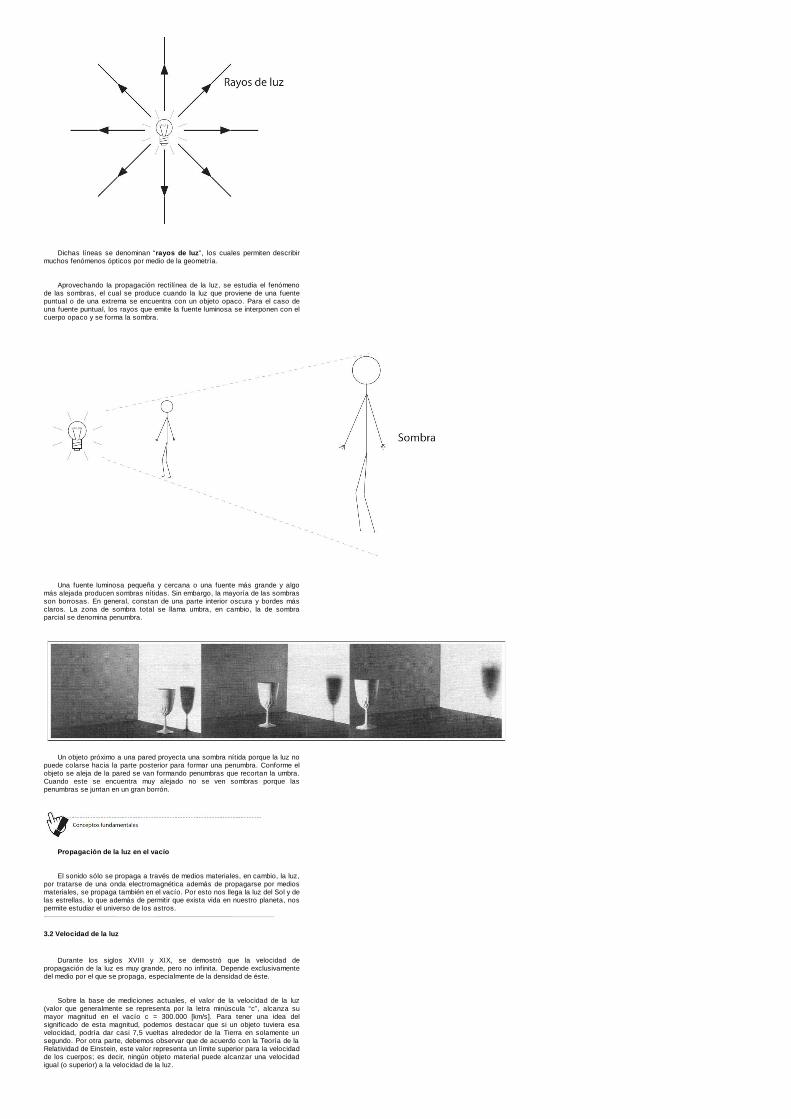
Dichas líneas se denominan “rayos de luz”, los cuales permiten describirmuchos fenómenos ópticos por medio de la geometría.
Aprovechando la propagación rectilínea de la luz, se estudia el fenómenode las sombras, el cual se produce cuando la luz que proviene de una fuentepuntual o de una extrema se encuentra con un objeto opaco. Para el caso deuna fuente puntual, los rayos que emite la fuente luminosa se interponen con elcuerpo opaco y se forma la sombra.
Una fuente luminosa pequeña y cercana o una fuente más grande y algomás alejada producen sombras nítidas. Sin embargo, la mayoría de las sombrasson borrosas. En general, constan de una parte interior oscura y bordes másclaros. La zona de sombra total se llama umbra, en cambio, la de sombraparcial se denomina penumbra.
Un objeto próximo a una pared proyecta una sombra nítida porque la luz nopuede colarse hacia la parte posterior para formar una penumbra. Conforme elobjeto se aleja de la pared se van formando penumbras que recortan la umbra.Cuando este se encuentra muy alejado no se ven sombras porque laspenumbras se juntan en un gran borrón.
Propagación de la luz en el vacío
El sonido sólo se propaga a través de medios materiales, en cambio, la luz,por tratarse de una onda electromagnética además de propagarse por mediosmateriales, se propaga también en el vacío. Por esto nos llega la luz del Sol y delas estrellas, lo que además de permitir que exista vida en nuestro planeta, nospermite estudiar el universo de los astros.
3.2 Velocidad de la luz
Durante los siglos XVIII y XIX, se demostró que la velocidad depropagación de la luz es muy grande, pero no infinita. Depende exclusivamentedel medio por el que se propaga, especialmente de la densidad de éste.
Sobre la base de mediciones actuales, el valor de la velocidad de la luz(valor que generalmente se representa por la letra minúscula “c”, alcanza sumayor magnitud en el vacío c = 300.000 [km/s]. Para tener una idea delsignificado de esta magnitud, podemos destacar que si un objeto tuviera esavelocidad, podría dar casi 7,5 vueltas alrededor de la Tierra en solamente unsegundo. Por otra parte, debemos observar que de acuerdo con la Teoría de laRelatividad de Einstein, este valor representa un límite superior para la velocidadde los cuerpos; es decir, ningún objeto material puede alcanzar una velocidadigual (o superior) a la velocidad de la luz.

En los demás medios, la velocidad de la luz es siempre un valor inferior a “c”y disminuye en la medida que la densidad del medio transparente aumenta.Algunos ejemplos en [km/s] son:
Si comparamos la velocidad de propagación del sonido con la de la luz, sededuce que el primero recorre 340 metros en un segundo mientras que la luzrecorre 300.000.000 metros en ese tiempo.
Lo anterior permite explicar lo que ocurre en días de tormenta al producirsedescargas eléctricas (rayos). Primero vemos el “relámpago” (luz emitida por elrayo) y unos segundos después podemos oír el “trueno” (sonido que provoca ladescarga). La diferencia de tiempo entre ellos nos permite incluso saber ladistancia del rayo y si la tormenta se acerca o se aleja.
Sabemos que las distancias entre las estrellas y nuestro planeta soninmensamente grandes, por lo que la luz emplea a veces hasta millones de añosen viajar entre ellas o entre cada una de ellas y la Tierra. Considerando esto esque en Astronomía se usa como unidad de longitud el “Año Luz”, que es ladistancia que la luz recorre en un año viajando por el vacío a la velocidad yaseñalada.
Se sabe que v = d / t es decir d = v · t d = 300.000 [km/s] · 1 [año]
Por la técnica del análisis dimensional, convertimos 1 año en segundos.
Año-luz1 año-luz = 9,5 · 1012 [km]
Esta unidad de longitud se ha preguntado en la PSU.
La estrella más cercana a la Tierra, próxima a alfa centauro, está a 4,3años-luz y las estrellas lejanas a 250.000.000 años-luz. Cabe destacar quecuando en las noches contemplamos las estrellas, ya sea a simple vista o pormedio de un telescopio, lo que vemos en la actualidad es el pasado deluniverso, porque esa luz pudo ser emitida hace millones de años.
3.3 Transmisión de la luz
La luz es capaz de atravesar diversos objetos, algunos con mayor eficaciaque otros. En la transmisión de la luz pueden ocurrir diversos fenómenos, talescomo reflexión, refracción y absorción.
3.4 Reflexión de la luz
Consiste en el rechazo y cambio de dirección que sufren los rayosluminosos al incidir sobre una superficie. Dependiendo de las irregularidades orugosidades de la superficie, la Reflexión puede producirse en forma Especular oen forma Difusa.
Cuando el haz incidente encuentra una superficie pulida o lisa, el hazreflejado esta muy bien definido, como se indica en la figura. Cuando estosucede decimos que la reflexión es “especular”; dicho fenómeno se observacuando la luz se refleja en un espejo, en un lago en calma o en un vidrio confondo oscuro.
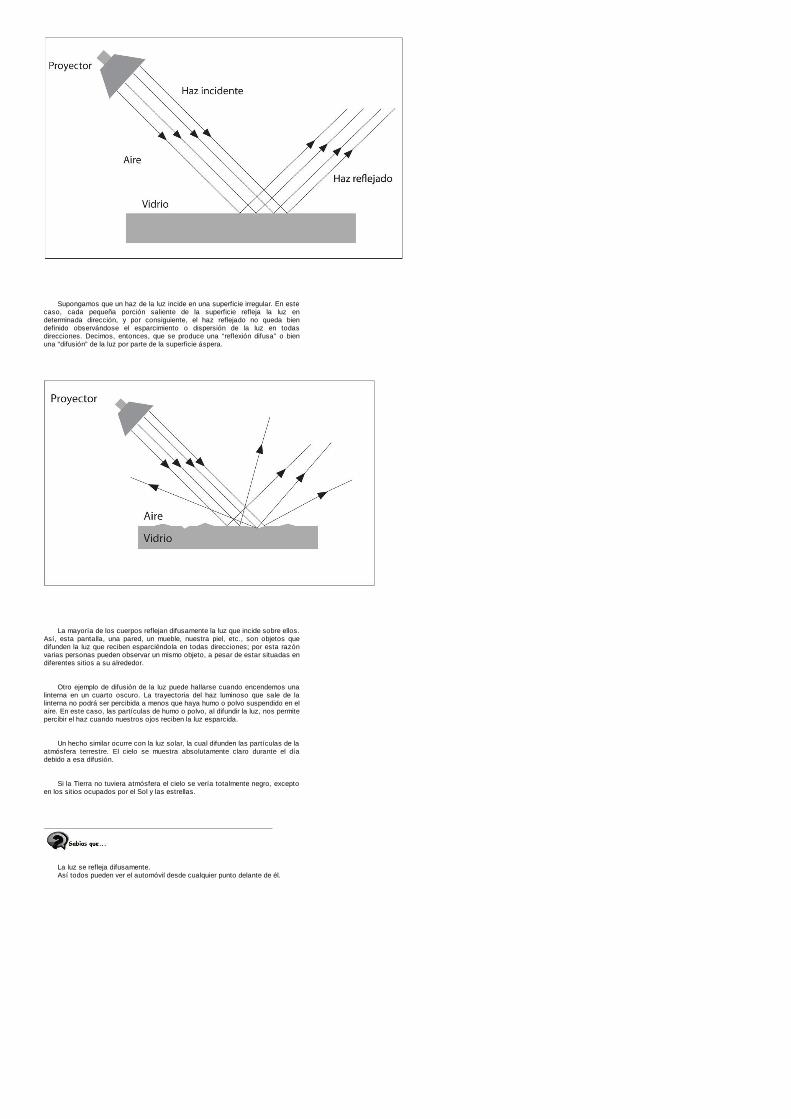
Supongamos que un haz de la luz incide en una superficie irregular. En estecaso, cada pequeña porción saliente de la superficie refleja la luz endeterminada dirección, y por consiguiente, el haz reflejado no queda biendefinido observándose el esparcimiento o dispersión de la luz en todasdirecciones. Decimos, entonces, que se produce una “reflexión difusa” o bienuna “difusión” de la luz por parte de la superficie áspera.
La mayoría de los cuerpos reflejan difusamente la luz que incide sobre ellos.Así, esta pantalla, una pared, un mueble, nuestra piel, etc., son objetos quedifunden la luz que reciben esparciéndola en todas direcciones; por esta razónvarias personas pueden observar un mismo objeto, a pesar de estar situadas endiferentes sitios a su alrededor.
Otro ejemplo de difusión de la luz puede hallarse cuando encendemos unalinterna en un cuarto oscuro. La trayectoria del haz luminoso que sale de lalinterna no podrá ser percibida a menos que haya humo o polvo suspendido en elaire. En este caso, las partículas de humo o polvo, al difundir la luz, nos permitepercibir el haz cuando nuestros ojos reciben la luz esparcida.
Un hecho similar ocurre con la luz solar, la cual difunden las partículas de laatmósfera terrestre. El cielo se muestra absolutamente claro durante el díadebido a esa difusión.
Si la Tierra no tuviera atmósfera el cielo se vería totalmente negro, exceptoen los sitios ocupados por el Sol y las estrellas.
La luz se refleja difusamente.Así todos pueden ver el automóvil desde cualquier punto delante de él.
• Principio de Fermat: Pierre Fermat estableció en 1650 que la luz siempreviaja, con velocidad constante, por aquella trayectoria que le tome el menortiempo posible. A velocidad constante, el menor tiempo corresponde alcamino más corto recorrido por la luz.
En la figura, se aprecia que el camino más corto es AOB, suponiendo queel rayo de luz sale de A, se refleja en el espejo en el punto O y, finalmentellega a B.
Todas las demás posibles trayectorias involucran recorrer mayordistancia.
Principio de Fermat
La luz viaja por el camino más corto AOB..
Consideremos la llama de una vela colocada frente a un espejo plano. Lasuperficie del espejo refleja rayos de luz en todas direcciones. El número derayos es infinito, y cada uno de ellos satisface la ley de la reflexión. En lasiguiente figura se muestran sólo dos rayos, que se originan en la punta de lallama y se reflejan en el espejo hacia el ojo de algún observador. Se observa quelos rayos divergen (se separan) a partir de la punta de la llama y siguendivergiendo a partir del espejo al reflejarse. Estos rayos divergentes parecenprovenir de un punto ubicado tras el espejo. La imagen de la vela que elobservador ve en el espejo se llama imagen virtual, porque la luz no pasarealmente por la posición de la imagen, pero se comporta virtualmente como silo hiciese.
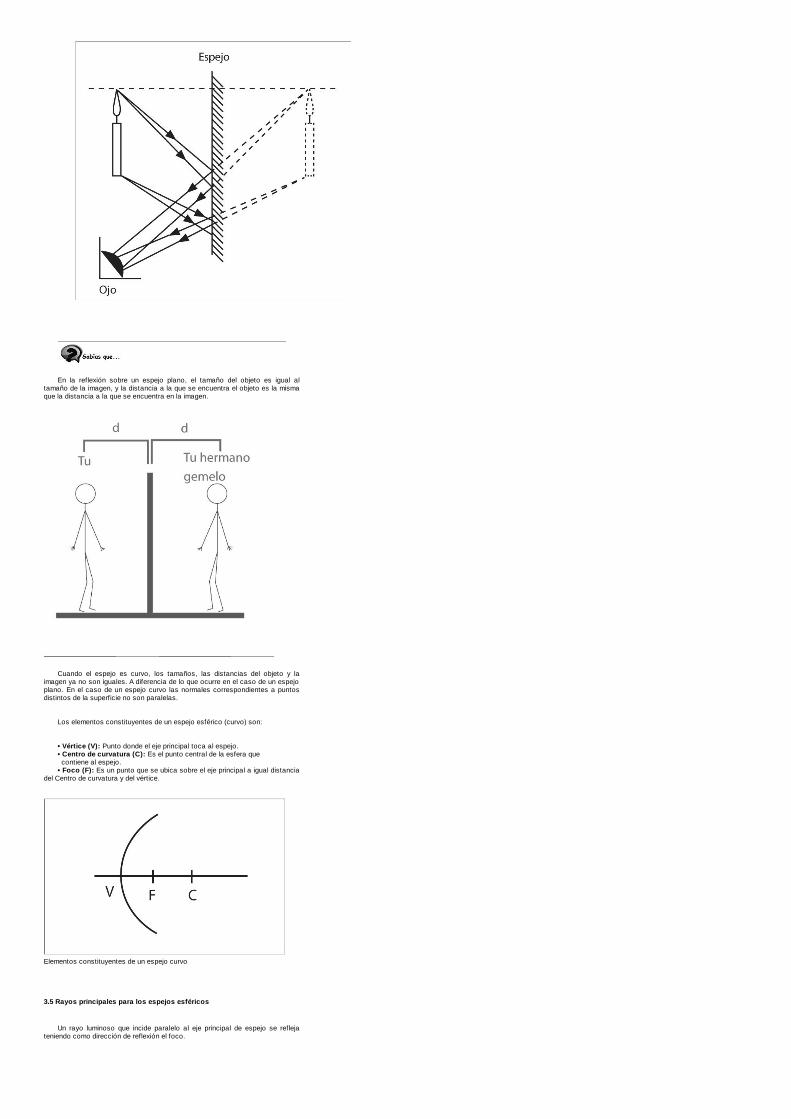
En la reflexión sobre un espejo plano, el tamaño del objeto es igual altamaño de la imagen, y la distancia a la que se encuentra el objeto es la mismaque la distancia a la que se encuentra en la imagen.
Cuando el espejo es curvo, los tamaños, las distancias del objeto y laimagen ya no son iguales. A diferencia de lo que ocurre en el caso de un espejoplano. En el caso de un espejo curvo las normales correspondientes a puntosdistintos de la superficie no son paralelas.
Los elementos constituyentes de un espejo esférico (curvo) son:
• Vértice (V): Punto donde el eje principal toca al espejo.• Centro de curvatura (C): Es el punto central de la esfera que contiene al espejo.• Foco (F): Es un punto que se ubica sobre el eje principal a igual distancia
del Centro de curvatura y del vértice.
Elementos constituyentes de un espejo curvo
3.5 Rayos principales para los espejos esféricos
Un rayo luminoso que incide paralelo al eje principal de espejo se reflejateniendo como dirección de reflexión el foco.
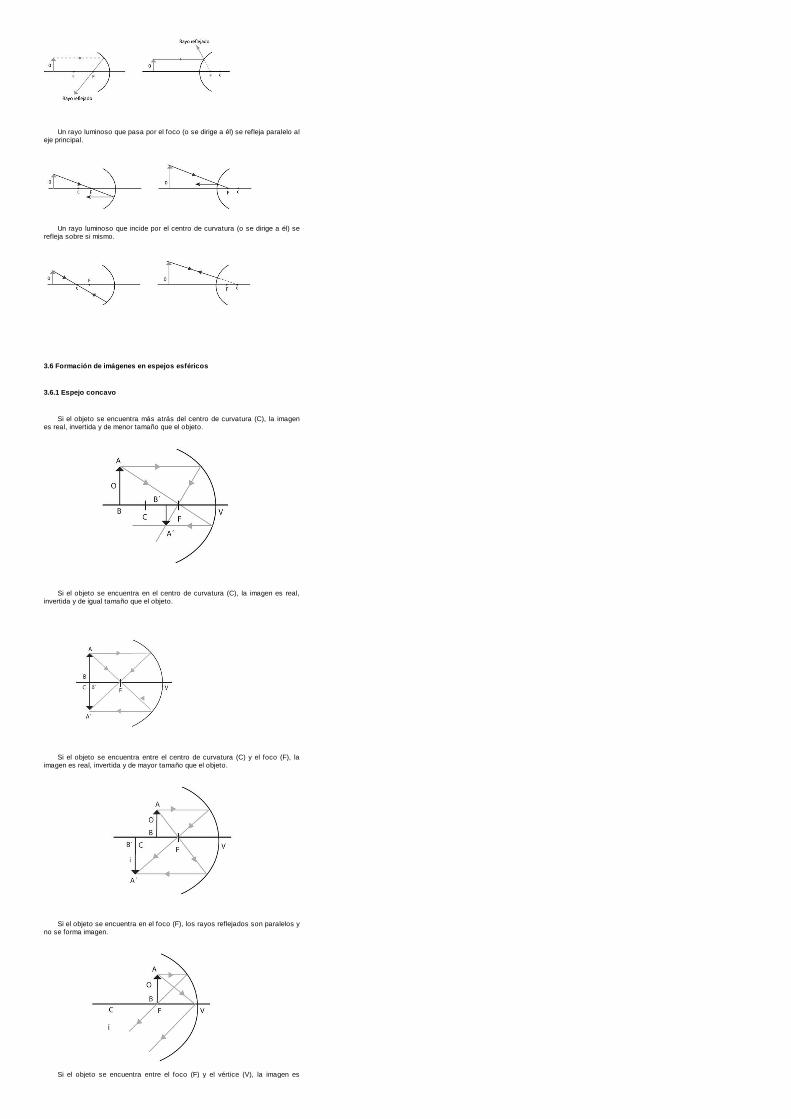
Un rayo luminoso que pasa por el foco (o se dirige a él) se refleja paralelo aleje principal.
Un rayo luminoso que incide por el centro de curvatura (o se dirige a él) serefleja sobre si mismo.
3.6 Formación de imágenes en espejos esféricos
3.6.1 Espejo concavo
Si el objeto se encuentra más atrás del centro de curvatura (C), la imagenes real, invertida y de menor tamaño que el objeto.
Si el objeto se encuentra en el centro de curvatura (C), la imagen es real,invertida y de igual tamaño que el objeto.
Si el objeto se encuentra entre el centro de curvatura (C) y el foco (F), laimagen es real, invertida y de mayor tamaño que el objeto.
Si el objeto se encuentra en el foco (F), los rayos reflejados son paralelos yno se forma imagen.
Si el objeto se encuentra entre el foco (F) y el vértice (V), la imagen es
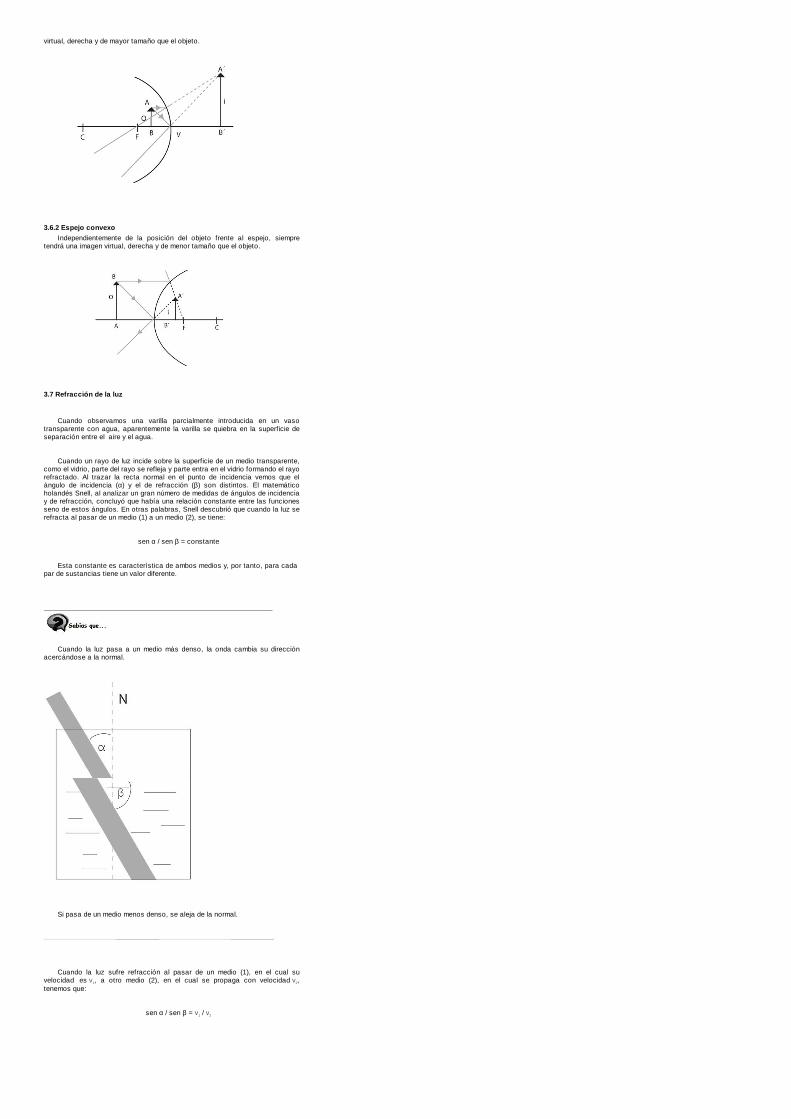
virtual, derecha y de mayor tamaño que el objeto.
3.6.2 Espejo convexoIndependientemente de la posición del objeto frente al espejo, siempre
tendrá una imagen virtual, derecha y de menor tamaño que el objeto.
3.7 Refracción de la luz
Cuando observamos una varilla parcialmente introducida en un vasotransparente con agua, aparentemente la varilla se quiebra en la superficie deseparación entre el aire y el agua.
Cuando un rayo de luz incide sobre la superficie de un medio transparente,como el vidrio, parte del rayo se refleja y parte entra en el vidrio formando el rayorefractado. Al trazar la recta normal en el punto de incidencia vemos que elángulo de incidencia (α) y el de refracción (β) son distintos. El matemáticoholandés Snell, al analizar un gran número de medidas de ángulos de incidenciay de refracción, concluyó que había una relación constante entre las funcionesseno de estos ángulos. En otras palabras, Snell descubrió que cuando la luz serefracta al pasar de un medio (1) a un medio (2), se tiene:
sen α / sen β = constante
Esta constante es característica de ambos medios y, por tanto, para cada par de sustancias tiene un valor diferente.
Cuando la luz pasa a un medio más denso, la onda cambia su direcciónacercándose a la normal.
Si pasa de un medio menos denso, se aleja de la normal.
Cuando la luz sufre refracción al pasar de un medio (1), en el cual suvelocidad es v1, a otro medio (2), en el cual se propaga con velocidad v2,tenemos que:
sen α / sen β = v1 / v2
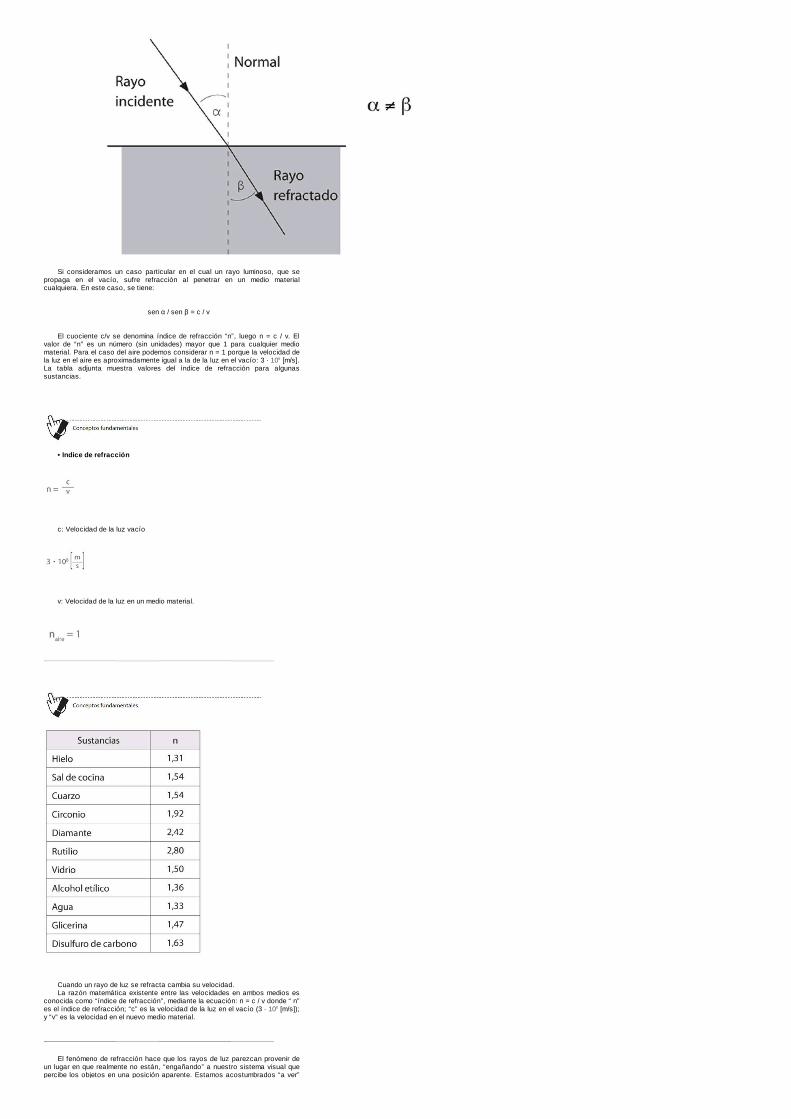
Si consideramos un caso particular en el cual un rayo luminoso, que sepropaga en el vacío, sufre refracción al penetrar en un medio materialcualquiera. En este caso, se tiene:
sen α / sen β = c / v
El cuociente c/v se denomina índice de refracción “n”, luego n = c / v. Elvalor de “n” es un número (sin unidades) mayor que 1 para cualquier mediomaterial. Para el caso del aire podemos considerar n = 1 porque la velocidad dela luz en el aire es aproximadamente igual a la de la luz en el vacío: 3 · 108 [m/s].La tabla adjunta muestra valores del índice de refracción para algunassustancias.
• Indice de refracción
c: Velocidad de la luz vacío
v: Velocidad de la luz en un medio material.
Cuando un rayo de luz se refracta cambia su velocidad.La razón matemática existente entre las velocidades en ambos medios es
conocida como “índice de refracción”, mediante la ecuación: n = c / v donde “ n”es el índice de refracción; “c” es la velocidad de la luz en el vacío (3 · 108 [m/s]);y “v” es la velocidad en el nuevo medio material.
El fenómeno de refracción hace que los rayos de luz parezcan provenir deun lugar en que realmente no están, “engañando” a nuestro sistema visual quepercibe los objetos en una posición aparente. Estamos acostumbrados “a ver”
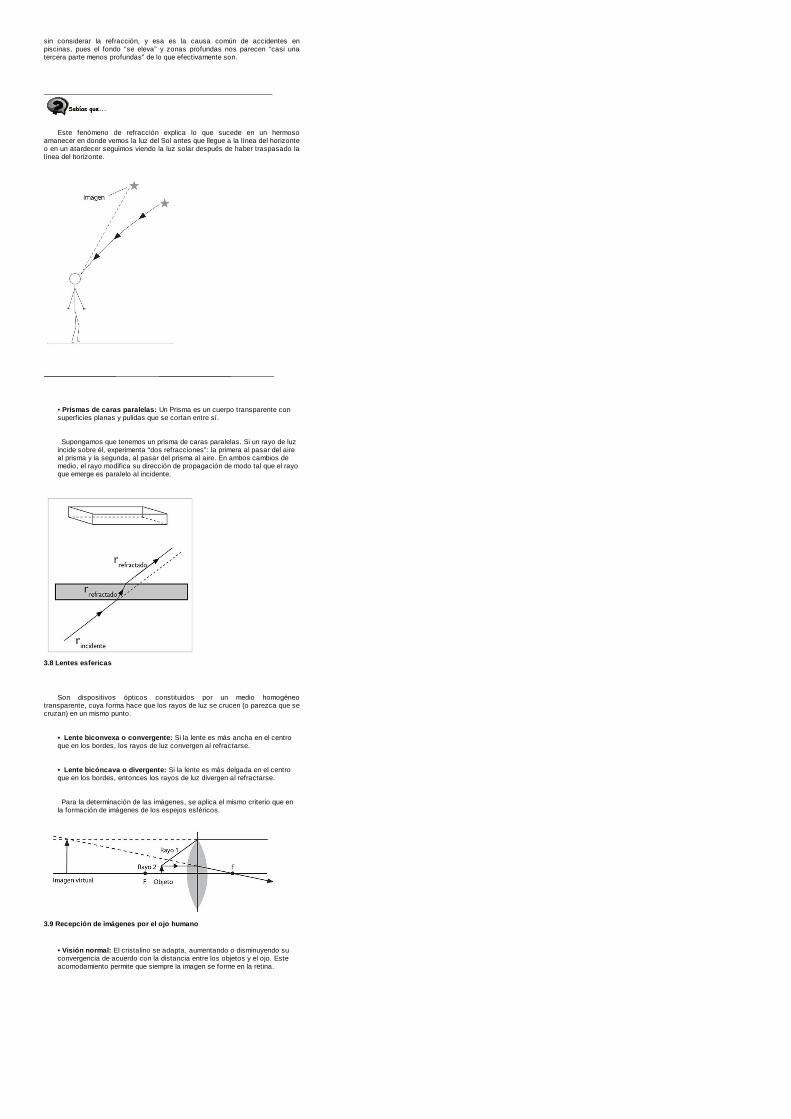
sin considerar la refracción, y esa es la causa común de accidentes enpiscinas, pues el fondo “se eleva” y zonas profundas nos parecen “casi unatercera parte menos profundas” de lo que efectivamente son.
Este fenómeno de refracción explica lo que sucede en un hermosoamanecer en donde vemos la luz del Sol antes que llegue a la línea del horizonteo en un atardecer seguimos viendo la luz solar después de haber traspasado lalínea del horizonte.
• Prismas de caras paralelas: Un Prisma es un cuerpo transparente consuperficies planas y pulidas que se cortan entre sí.
Supongamos que tenemos un prisma de caras paralelas. Si un rayo de luzincide sobre él, experimenta “dos refracciones”: la primera al pasar del aireal prisma y la segunda, al pasar del prisma al aire. En ambos cambios demedio, el rayo modifica su dirección de propagación de modo tal que el rayoque emerge es paralelo al incidente.
3.8 Lentes esfericas
Son dispositivos ópticos constituidos por un medio homogéneotransparente, cuya forma hace que los rayos de luz se crucen (o parezca que secruzan) en un mismo punto.
• Lente biconvexa o convergente: Si la lente es más ancha en el centroque en los bordes, los rayos de luz convergen al refractarse.
• Lente bicóncava o divergente: Si la lente es más delgada en el centroque en los bordes, entonces los rayos de luz divergen al refractarse.
Para la determinación de las imágenes, se aplica el mismo criterio que enla formación de imágenes de los espejos esféricos.
3.9 Recepción de imágenes por el ojo humano
• Visión normal: El cristalino se adapta, aumentando o disminuyendo suconvergencia de acuerdo con la distancia entre los objetos y el ojo. Esteacomodamiento permite que siempre la imagen se forme en la retina.
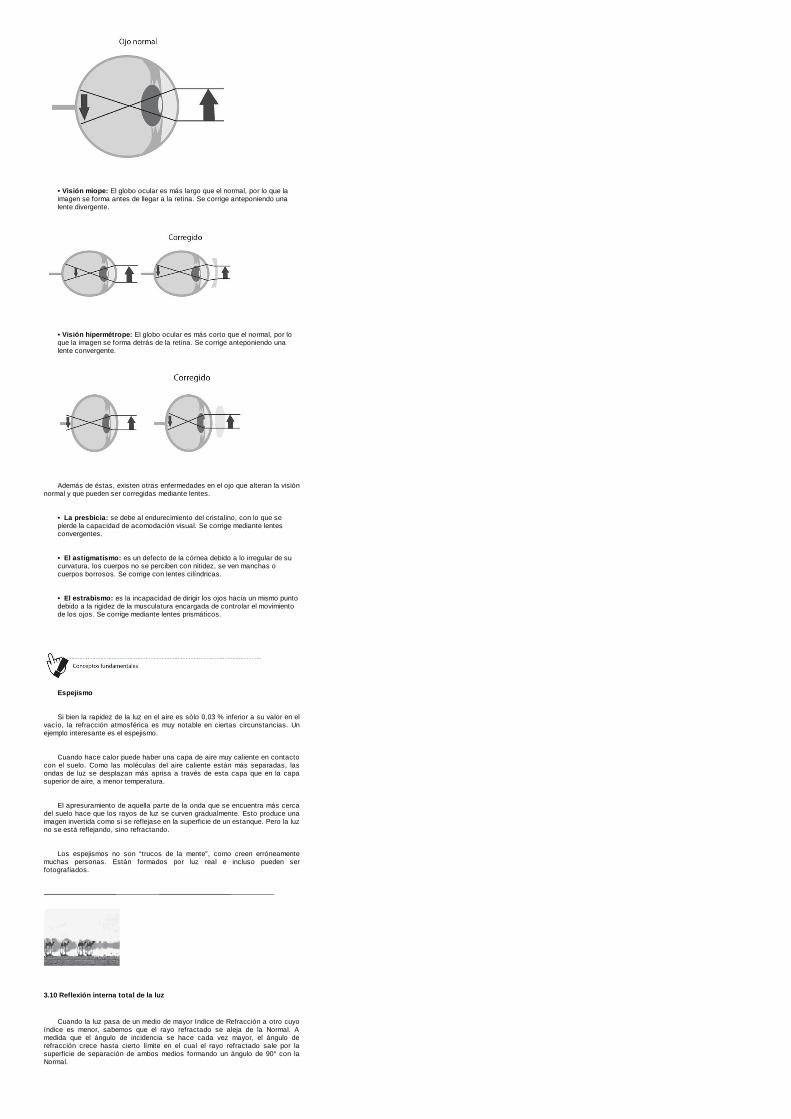
• Visión miope: El globo ocular es más largo que el normal, por lo que laimagen se forma antes de llegar a la retina. Se corrige anteponiendo unalente divergente.
• Visión hipermétrope: El globo ocular es más corto que el normal, por loque la imagen se forma detrás de la retina. Se corrige anteponiendo unalente convergente.
Además de éstas, existen otras enfermedades en el ojo que alteran la visiónnormal y que pueden ser corregidas mediante lentes.
• La presbicia: se debe al endurecimiento del cristalino, con lo que sepierde la capacidad de acomodación visual. Se corrige mediante lentesconvergentes.
• El astigmatismo: es un defecto de la córnea debido a lo irregular de sucurvatura, los cuerpos no se perciben con nitidez, se ven manchas ocuerpos borrosos. Se corrige con lentes cilíndricas.
• El estrabismo: es la incapacidad de dirigir los ojos hacia un mismo puntodebido a la rigidez de la musculatura encargada de controlar el movimientode los ojos. Se corrige mediante lentes prismáticos.
Espejismo
Si bien la rapidez de la luz en el aire es sólo 0,03 % inferior a su valor en elvacío, la refracción atmosférica es muy notable en ciertas circunstancias. Unejemplo interesante es el espejismo.
Cuando hace calor puede haber una capa de aire muy caliente en contactocon el suelo. Como las moléculas del aire caliente están más separadas, lasondas de luz se desplazan más aprisa a través de esta capa que en la capasuperior de aire, a menor temperatura.
El apresuramiento de aquella parte de la onda que se encuentra más cercadel suelo hace que los rayos de luz se curven gradualmente. Esto produce unaimagen invertida como si se reflejase en la superficie de un estanque. Pero la luzno se está reflejando, sino refractando.
Los espejismos no son “trucos de la mente”, como creen erróneamentemuchas personas. Están formados por luz real e incluso pueden serfotografiados.
3.10 Reflexión interna total de la luz
Cuando la luz pasa de un medio de mayor Indice de Refracción a otro cuyoíndice es menor, sabemos que el rayo refractado se aleja de la Normal. Amedida que el ángulo de incidencia se hace cada vez mayor, el ángulo derefracción crece hasta cierto límite en el cual el rayo refractado sale por lasuperficie de separación de ambos medios formando un ángulo de 90° con laNormal.

En la figura, δ representa el ángulo de incidencia para el cual ocurre estefenómeno. Este ángulo recibe el nombre de “ Angulo Límite” y es característicode cada sustancia. Por ejemplo, para el agua es 48°; para el vidrio, 42°; para eldiamante, 24° (todos medidos con respecto al aire). Para todos los ángulos deincidencia superiores al “ángulo límite”, la luz ya no se refracta, sino que serefleja en la superficie de separación de ambos medios, como si esta fuera unespejo. Este fenómeno es conocido como Reflexión Interna Total y sólo ocurrecuando la luz incide desde un medio de mayor Indice de Refracción a otromenor.
La reflexión total de la luz permite explicar fenómenos como el espejismo yobservar objetos por sobre una fogata. También es el principio defuncionamiento de las fibras ópticas.
Las fibras ópticas son muy importantes en las comunicaciones, ya quepueden llevar miles de mensajes telefónicos simultáneamente. También se usancon mucho éxito en medicina, en el diagnóstico, tratamiento de diferentesenfermedades y cirugía con láser.
Fibras ópticas
Utilizan la reflexión interna total para las comunicaciones.
3.11 Absorción de la luz
Es la disminución paulatina de la intensidad luminosa a medida que el rayode luz avanza en un medio transparente.Los materiales absorben la luzdependiendo de la longitud de onda de ésta. Esta selectividad (unas longitudesde onda sí y otras no) radica en la naturaleza y disposición de los átomos quecomponen el material.
Por lo tanto, la luz que traspasa un objeto es en parte absorbida por él enuna proporción que depende del material de que está hecho el objeto.
Mientras menos luz refleje un medio, más absorbe y mientras más luzrefleje, menos absorbe.
La mayor absorción de luz involucra un aumento de la temperatura delmaterial, pues la luz transporta energía.
a. Cuerpos transparentes
Son los que se dejan atravesar por la luz, permitiendo reconocer los objetosobservados a través de ellos, por ejemplo, el aire, el vidrio común, el agua yciertos plásticos.
b. Cuerpos traslúcidos
Son los que se dejan atravesar por la luz sin permitir reconocer la forma delos cuerpos observados a través de ellos, es decir, una parte de la luz estransmitida, otra es reflejada de manera difusa y otra parte es absorbida por elmaterial, por ejemplo, el vidrio “empavonado”, la porcelana, el papel y algunosplásticos.
c. Cuerpos opacos
Son los que no se dejan atravesar por la luz, por ejemplo, los metales, laspiedras, etc.
3.12 Difracción
La figura muestra la difracción que ocurre cuando la luz se encuentra con
el obstáculo y de acuerdo al principio de Huygens, esta perforación actúa comouna nueva fuente de ondas.
El fenómeno de difracción explica el comportamiento ondulatorio de la luz,cuya longitud de onda es muy pequeña, ya que el fenómeno solo se puedeapreciar con aberturas extremadamente pequeñas.
Para acentuar la Difracción de una onda es necesario cumplir doscondiciones:
- aumentar su longitud de onda, o
- disminuir el tamaño del orificio.
Difracción de la luz
La luz pasa a través de un obstáculo.
3.13 Interferencia
Las ondas de luz se superponen como las del sonido, formando zonasdonde se refuerzan (interferencia constructiva) y zonas donde se anulan(interferencia destructiva).
En una figura de interferencia se observan líneas nodales (A, A’, B, B’, etc.),constituidas por puntos P permanentemente en reposo (interferenciadestructiva), y crestas dobles y valles dobles (interferencia constructiva) sepropagan entre las líneas nodales P’.
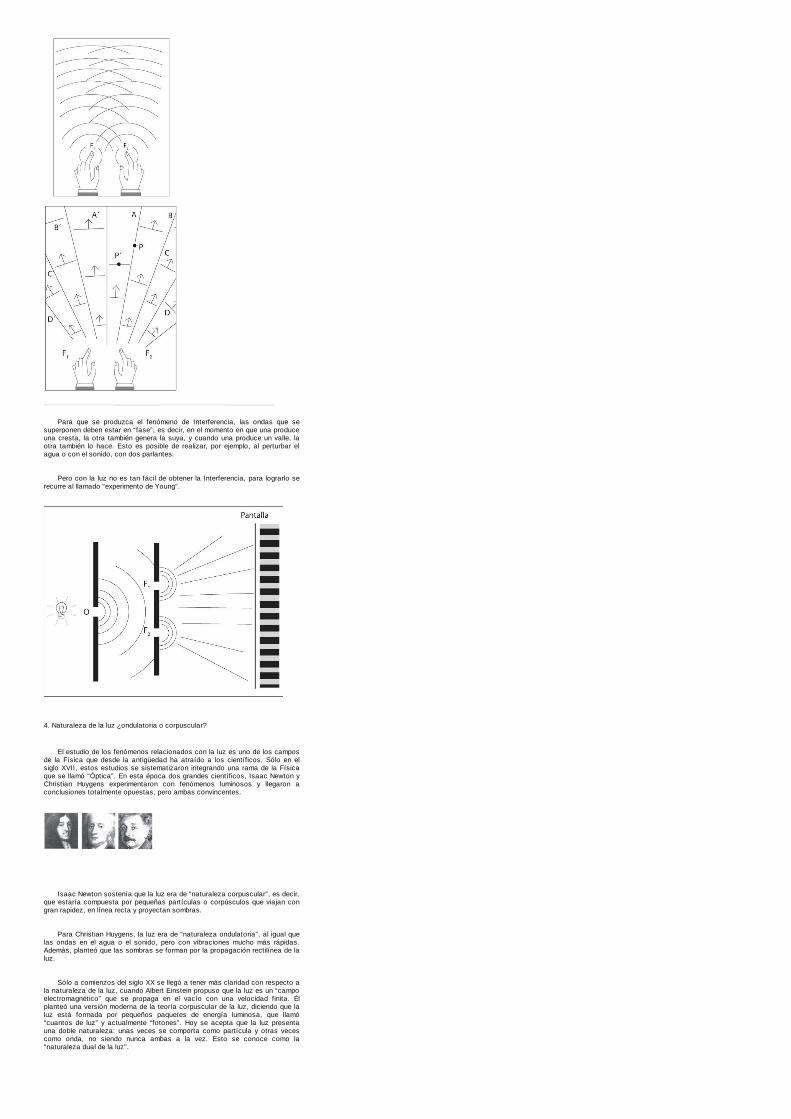
Para que se produzca el fenómeno de Interferencia, las ondas que sesuperponen deben estar en “fase”, es decir, en el momento en que una produceuna cresta, la otra también genera la suya, y cuando una produce un valle, laotra también lo hace. Esto es posible de realizar, por ejemplo, al perturbar elagua o con el sonido, con dos parlantes.
Pero con la luz no es tan fácil de obtener la Interferencia, para lograrlo serecurre al llamado “experimento de Young”.
4. Naturaleza de la luz ¿ondulatoria o corpuscular?
El estudio de los fenómenos relacionados con la luz es uno de los camposde la Física que desde la antigüedad ha atraído a los científicos. Sólo en elsiglo XVII, estos estudios se sistematizaron integrando una rama de la Físicaque se llamó “Óptica”. En esta época dos grandes científicos, Isaac Newton yChristian Huygens experimentaron con fenómenos luminosos y llegaron aconclusiones totalmente opuestas, pero ambas convincentes.
Isaac Newton sostenía que la luz era de “naturaleza corpuscular”, es decir,que estaría compuesta por pequeñas partículas o corpúsculos que viajan congran rapidez, en línea recta y proyectan sombras.
Para Christian Huygens, la luz era de “naturaleza ondulatoria”, al igual quelas ondas en el agua o el sonido, pero con vibraciones mucho más rápidas.Además, planteó que las sombras se forman por la propagación rectilínea de laluz.
Sólo a comienzos del siglo XX se llegó a tener más claridad con respecto ala naturaleza de la luz, cuando Albert Einstein propuso que la luz es un “campoelectromagnético” que se propaga en el vacío con una velocidad finita. Élplanteó una versión moderna de la teoría corpuscular de la luz, diciendo que laluz está formada por pequeños paquetes de energía luminosa, que llamó“cuantos de luz” y actualmente “fotones”. Hoy se acepta que la luz presentauna doble naturaleza: unas veces se comporta como partícula y otras vecescomo onda, no siendo nunca ambas a la vez. Esto se conoce como la“naturaleza dual de la luz”.
4.1 ¿Por qué percibimos los objetos de diferentes colores?
Los colores de todos los cuerpos de la naturaleza se deben sencillamenteal hecho de que reflejan la luz de cierto color en mayor cantidad que la de otroscolores.
Esto significa que un cuerpo opaco verde iluminado con luz blanca, se ve detal color porque absorbe gran parte de los demás colores que constituyen la luzblanca, y refleja preferentemente la luz verde. De esta forma, la mayor parte delas veces percibimos el color por Reflexión. Cuando un cuerpo refleja todos loscolores lo vemos “blanco” y si no refleja ninguno lo vemos “negro”.
Cuando el ambiente está húmedo, por ejemplo después de una lluvia, la luzdel Sol es interceptada por numerosas gotas de agua. En el interior de cadagota, los colores que componen la luz visible se refractan en diferente dirección,produciéndose la “dispersión cromática” o “descomposición de la luz”. Luego, laluz se refleja en la interfase opuesta de la gota y experimenta una segundarefracción abriéndose al exterior en un “espectro” de colores. Este efecto,multiplicado por los millones de gotas que hay en el aire, produce el “arcoíris”.
Se llama “espectro de la luz blanca” a la gama de colores de diferentefrecuencia que componen la luz proveniente del Sol o de una lámpara común.Este espectro consta básicamente de los colores: rojo, amarillo, verde, azul yvioleta. A cada color le corresponde una longitud de onda determinada. Análogoa lo que ocurre con nuestro sentido de la audición, que no detecta todos lossonidos que pueden producirse en la naturaleza, nuestro sentido de la vistaposee una limitación semejante.
Existen radiaciones que están a nuestro alrededor, pero que no podemosdetectarlas, como los rayos infrarrojos y ultravioleta, los rayos X, ondas deradio y T.V., las microondas y los rayos gama. Todas ellas son de la mismanaturaleza que el “espectro visible” y sólo difieren en la frecuencia (o en lalongitud de onda).
4.2 ¿Qué es un rayo láser?
El láser es un tipo especial de radiación electromagnética visible cuyasaplicaciones tecnológicas y científicas aumentan cada día.
El término “láser” está formado por las iniciales de las siguientes palabrasen inglés: “light amplification by estimulated emission of radiation”, que significa“amplificación de la luz por emisión estimulada de radiación”.
El láser consta de un tubo que en su interior posee una sustancia química(ciertos cristales, como el rubí; materiales gaseosos, como el helio-neón o elargón o líquidos) cuyos átomos son estimulados por una fuente de corrienteeléctrica lo que hace que emita fotones.
Estos fotones se reflejan sucesivamente en los espejos del tubo y producenondas con igual frecuencia.
Un haz de rayos láser experimenta las propiedades generales de la luz; esdecir, se refleja, refracta, se difracta e interfiere y se diferencia de la luz comúnpor algunas características:
• El haz de láser se presenta siempre con intensidad muy alta, es decir, hayalta concentración de energía en áreas muy pequeñas (haces muydelgados).• La luz del láser es “monocromática”, es decir, está constituida porradiaciones que presentan una frecuencia única de valor determinado. Elcolor del láser depende de la sustancia que se utiliza.
Por ejemplo, un láser de neón emite luz roja, uno de criptonio, luz verde.
• La luz de un haz de láser es “coherente”, es decir, los montes y valles delas ondas están alineados, mientras que un haz de luz común esincoherente.Son innumerables las aplicaciones de los rayos láser en diversos sectoresde la ciencia, de la tecnología y de la vida cotidiana. Entre ellas podemoscitar algunas:
• Lectura de código de barras en los supermercados.• En telecomunicaciones, utilizando cables de fibra óptica para enviarseñales de T.V. y teléfono.• Para soldar y cortar metales.• Para medir con precisión distancias muy grandes, como la distanciaTierra-Luna.• Para perforar orificios muy pequeños y bien definidos, en sustanciasduras.• En los CDs. y videos discos, para reproducción, con altísima fidelidad ysin ruidos de sonidos e imágenes.• En holografía, para obtener fotografías tridimensionales de un objeto(hologramas).• En medicina, en cirugías para sustituir bisturíes, en endodoncia y para“soldar” retinas desprendidas.• Los haces de luces de colores en una discoteca.
4.3 Instrumentos ópticos
• Instrumentos de proyección: Se trata de instrumentos que formanimágenes reales, y que el observador puede ver al ser proyectadas oregistradas en una pantalla.
• Instrumentos de observación: Se trata de instrumentos que formanimágenes virtuales de los objetos, las que son vistas por el observadordirectamente.
• La lupa: Es una lente de aumento y corresponde al más simple de losinstrumentos ópticos de observación. Es una lente convergente que formauna imagen del objeto de mayor tamaño, derecha y virtual. Si la lupa estáasociada con un espejo y colocada en un soporte se convierte en unmicroscopio simple.
• El microscopio: Es un instrumento de observación compuesto por dos
• El microscopio: Es un instrumento de observación compuesto por doslentes convergentes ubicadas en los extremos de un tubo. La lente que estáubicada en el extremo de observación se llama objetivo y la otra se llamaocular. La distancia focal de la lente objetivo es menor que la de la lenteocular.
Microscopio
• El proyector de diapositivas: Está formado por una lente convergente,llamada objetivo y una lámpara que ilumina una diapositiva que contiene unaimagen a proyectar. Al pasar la luz por la diapositiva (objeto) se proyectasobre la lente convergente, donde se produce un aumento de la imagen quese proyecta finalmente sobre una pantalla.
• La cámara fotográfica: Está compuesta por una lente convergente, porla cual pasa la luz hacia el interior de una cámara negra donde se ubica unapelícula fotosensible (lámina de acetato de celulosa recubierta con unaemulsión de bromuro de plata), produciendo una reacción química en ella.La lente se denomina objetivo y la luz que ingresa a la cámara se regulamediante un diafragma.
Cámara fotográfica
• El telescopio
- Telescopio reflector: Concentra la luz mediante el empleo de un espejocóncavo que actúa como objetivo, el cual la refleja hacia un espejo planomás pequeño, que finalmente la desvía lateralmente hacia el lente ocular.Se obtienen imágenes amplificadas, reales e invertidas del objeto. Fuedesarrollado por Isaac Newton en 1671.
- Telescopio refractor: La luz proveniente de algún cuerpo celeste pasa através de una lente convergente y una divergente. Se obtienen imágenesamplificadas, invertidas y virtuales. Fue desarrollado por Galileo Galilei en1609.
1. Ondas transversales: La dirección de propagación de la onda esperpendicular a la dirección de oscilación de las partículas (La luz).
2. Ondas longitudinales: La dirección de propagación de la onda es paralelaa la dirección de oscilación de las partículas (El sonido).
3. Longitud de onda: Longitud horizontal que abarca un ciclo o longitudentre dos valles o dos montes o tres nodos consecutivos.
4. Período: Tiempo que tarda la partícula en describir una oscilacióncompleta.
5. Frecuencia: Es el número de oscilaciones que describe la partícula en
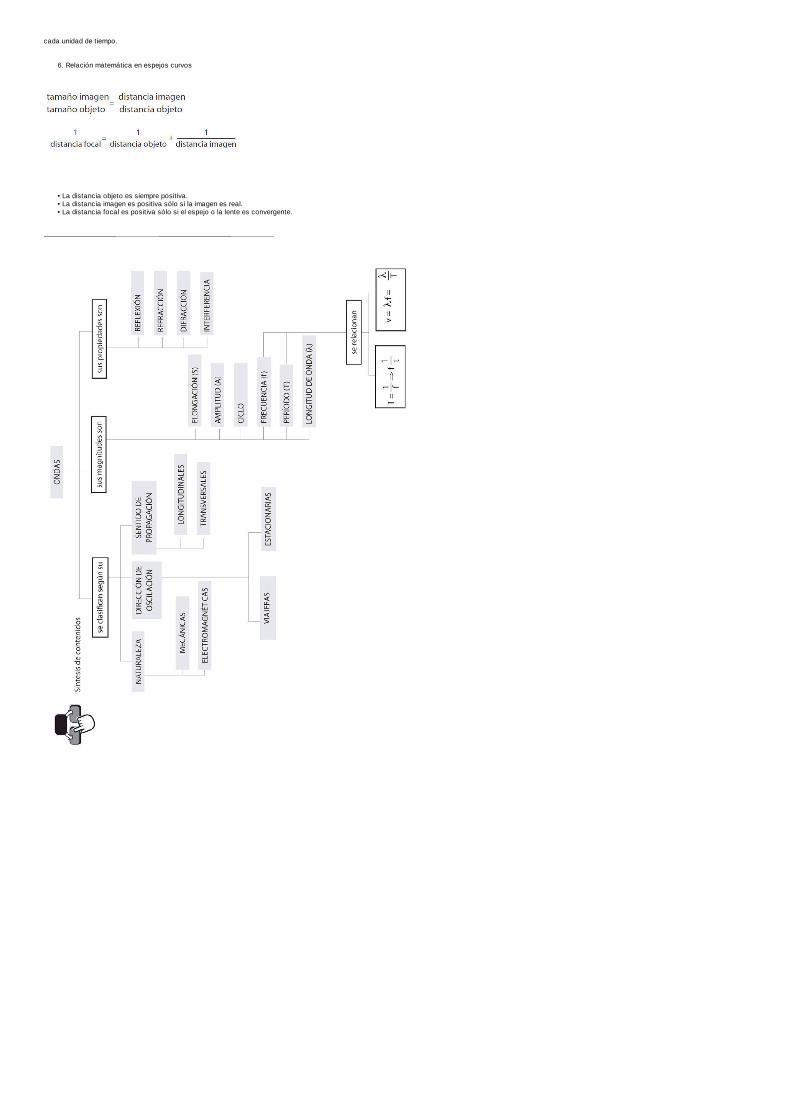
cada unidad de tiempo.
6. Relación matemática en espejos curvos
• La distancia objeto es siempre positiva.• La distancia imagen es positiva sólo si la imagen es real.• La distancia focal es positiva sólo si el espejo o la lente es convergente.
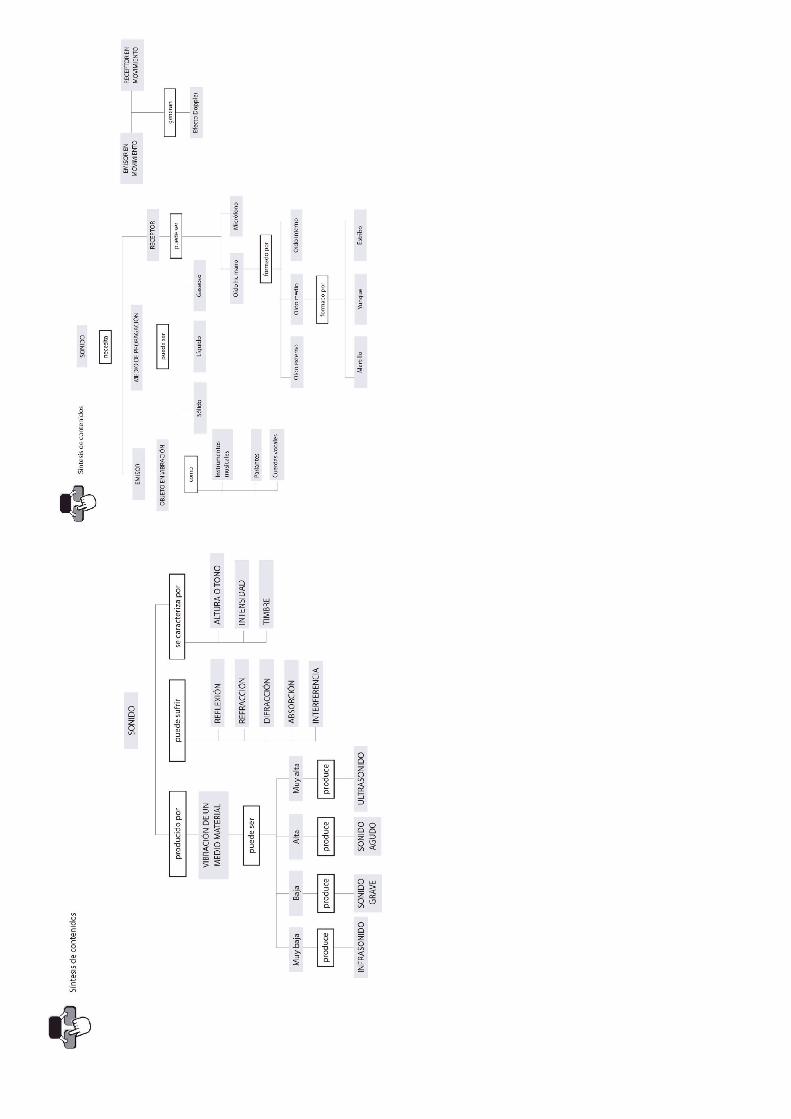
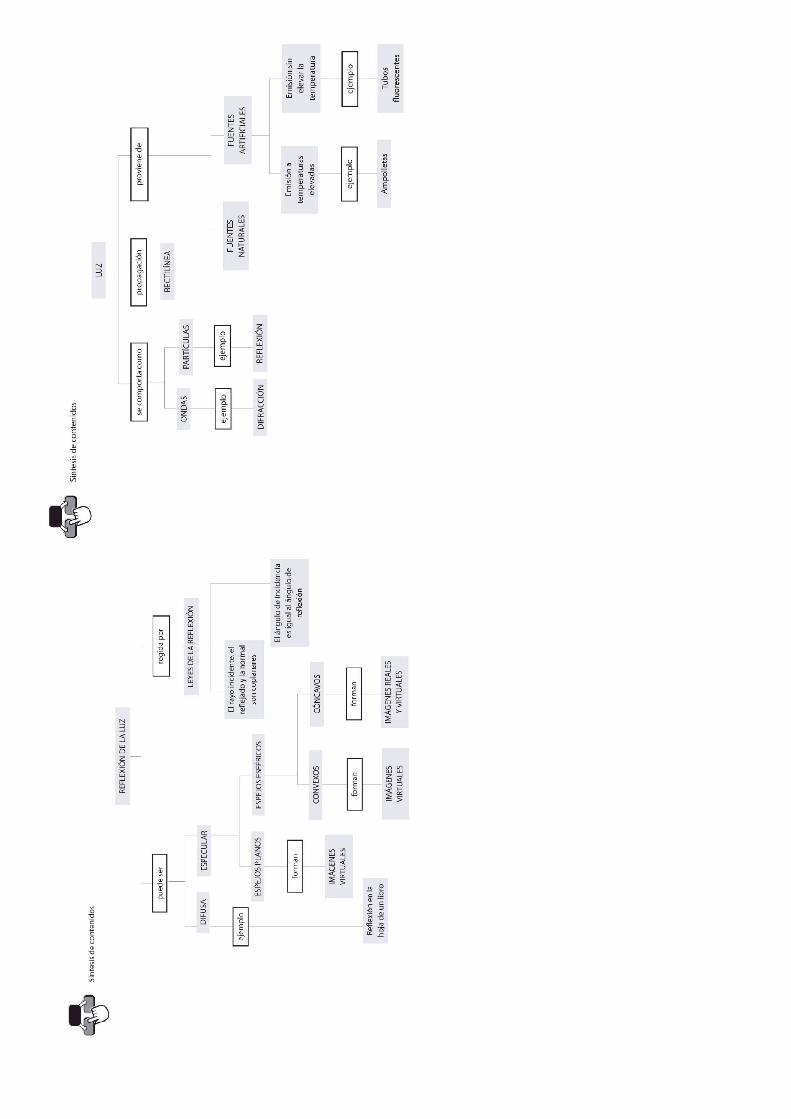
CAPÍTULO 5: LA ELECTRICIDAD
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Conocer la importancia de la electricidad en la vida moderna.• Manejar relaciones matemáticas sencillas para obtener resultadosnuméricos de magnitudes relevantes (por ejemplo, la relación entrepotencia, corriente eléctrica y voltaje).• Reconocer que una misma magnitud puede manifestarse en formasdiferentes en la naturaleza (por ejemplo, la energía).
En lo referente a la naturaleza de la electricidad, mucho se ha especulado através del tiempo; pero, a pesar de todos los esfuerzos y descubrimientos, sólouna afirmación categórica podemos hacer al respecto: “la electricidad es unaforma de energía”.
La electricidad estudia el comportamiento de las cargas eléctricas, lasleyes Físicas que las rigen y la forma cómo se relacionan con el resto de laFísica. Como parte de la electricidad, existe una rama denominadaelectrostática que estudia los casos en que las cargas no se mueven en formapermanente.
Los estudios de la electricidad se remontan a épocas muy antiguas,actualmente a cada instante nos relacionamos con hechos de naturalezaeléctrica, nuestro modo de vida depende estrechamente de las técnicas yaparatos eléctricos modernos.
Los primeros descubrimientos de los cuales se tiene noticia en relación conlos fenómenos eléctricos fueron realizados por los griegos en la Antigüedad.

El filósofo y matemático Thales, que vivió en la ciudad de Mileto en el sigloV a. C., observó que un trozo de ámbar (mineral amarillento que proviene de lafosilización de resinas de árboles de madera blanda), después de ser frotadocon una piel de animal, adquiría la propiedad de atraer cuerpos livianos (comotrozos de paja y pequeñas semillas)
Estas observaciones dejaron de gestarse por 2000 años, hasta que en elRenacimiento, el médico inglés William Gilbert observó que algunos otroscuerpos se comportan como el ámbar al ser frotados y que la atracción queejercen se manifiesta sobre cualquier otro cuerpo, aun cuando no sea ligero.
William Gilbert, científico de mayor renombre en Inglaterra durante elreinado de Isabel I, estudió medicina y se convirtió en un médico de prestigio. Su trabajo más importante se transcribe en la obra publicada en 1600: “Sobrelos imanes, los cuerpos magnéticos y el gran imán terrestre”. Fue el primero queempleó los términos atracción eléctrica, fuerza eléctrica, polo de un imán eimaginó a la Tierra como un gran imán.
1. Electrostática
1.1 Carga Eléctrica
• El Átomo: La constitución de la materia se basa en elementosfundamentales denominados átomos.
Éstos están formados básicamente por un elemento central llamado núcleo(constituido por partículas denominadas protones y neutrones) y un determinadonúmero de partículas que giran en torno a él, denominadas electrones.
Lo que mantiene confinados a los electrones orbitando constantementealrededor del núcleo, evitando que se “escapen”, no es precisamente la fuerzade atracción gravitatoria debida a la masa de estos elementos. Pese a que éstafuerza existe, se ha verificado que a escala atómica ella es despreciable. Laexplicación reside en una característica intrínseca que tienen los protones yelectrones: La carga eléctrica. Esta carga eléctrica fundamental es de signoopuesto pero de igual magnitud. Los “electrones” tienen “carga eléctricanegativa” y los protones, “carga positiva”. La transferencia e interacción entreestas cargas fundamentales redunda en la manifestación de los fenómenoseléctricos. Esta interacción responde a la “ley de los signos”: cargas delmismo signo se repelen y cargas de signos opuestos se atraen.
Por otra parte, la magnitud de la interacción disminuye con la distancia.
La carga del electrón (o bien del protón) constituye la unidad de cargaelemental, en el sentido de que no existen en la naturaleza partículas o cuerposcon una carga menor que ella. La carga de cualquier cuerpo es siempre unmúltiplo entero de esta unidad elemental de carga. Representaremos a la cargaeléctrica mediante la letra q o Q.
Comparado con el electrón, la magnitud de la fuerza que mantiene a losprotones confinados al núcleo es tan elevada (fuerza de interacción nuclearfuerte) que hace que se considere únicamente al electrón como carga móvil.
El tamaño del electrón es tan reducido que un pequeño grano de salcontiene unos “cien trillones de ellos” Por esto se decidió adoptar como unidadde carga eléctrica al Coulomb, definiéndolo como la carga equivalente a 6,25trillones de electrones, es decir:
1 [C] = 6,25 · 1018 qe
de lo cual se deduce que:
qe = −1,6 · 10-18 [C] = −4,8 · 10-10[stc]
En todo átomo neutro el número de protones es igual al número deelectrones, por lo tanto, el átomo se ve desde afuera como si no tuviese carga. Como conclusión, se deduce, entonces, que la magnitud de la carga de unelectrón debe ser igual a la magnitud de la carga de un protón; en efecto, comola carga del protón es igual, pero de signo contrario a la carga de un electrón,cada protón del núcleo anula la carga de un electrón y, en consecuencia, elátomo resulta neutro:
La masa de los protones y neutrones es aproximadamente igual, mientrasque la de los electrones es del orden de 1.830 veces menor.
mp = 1,67 x 10-24 [g]me = 9,106 ⋅ 10-28 [g]
Ley de los Signos
•Cargas del mismo signo se repelen entre sí.•Cargas del signo contrario seatraen entre sí.
Unidad de Carga EléctricaEn los diversos sistemas de unidades no se emplea la carga del electrón
como unidad patrón, sino que, por diversos motivos de tipo práctico yoperacional, se definen unidades propias.
S.I: 1 [Coulomb] = 1 [C]
C.G.S.: 1 [Statcoulomb] = 1 [stc]
Conversiones
1 [C] = 3 ⋅ 109[stc]
3,33 ⋅ 10-10 [C] = 1 [stc]
Los materiales se pueden clasificar de acuerdo al comportamiento de susátomos como: Aisladores o Dieléctricos y Conductores.
Debido a la estabilidad de los protones en el núcleo, el comportamientoeléctrico de los cuerpos depende exclusivamente de la pérdida o ganancia deelectrones. Si un cuerpo está cargado positivamente es porque perdió o cedióelectrones. Si un cuerpo está cargado negativamente significa que ganó o captóelectrones.

1.2 Materiales eléctricos
Para cargar un cuerpo los respectivos átomos deben aceptar o cederelectrones con respecto a su estado neutro. Sin embargo, no todos los átomoso moléculas que existen en la naturaleza permiten este comportamiento. Enconsecuencia, los materiales se clasifican en:
• Aislantes o dieléctricos
Los electrones de estos materiales se encuentran fuertemente ligados adeterminados átomos, por lo cual no pueden desplazarse fácilmente por elmaterial. Sin embargo estos electrones, bajo ciertas condiciones, pueden sercaptados o cedidos por los átomos, y por lo tanto estos materiales pueden sercargados eléctricamente, aunque no pueden conducir una corriente eléctrica.
En la realidad no existen los aislantes perfectos, sino que se puedeconsiderar como tales sólo a un grupo de materiales y bajo ciertas condiciones. Son ejemplos de éstos la goma, el vidrio, la porcelana, el plástico y el papel, entre otros.
• Conductores
Los electrones de los átomos de estos materiales están débilmente ligadosa sus núcleos (órbitas más eternas), por lo que pueden desplazarse confacilidad a través del material. Por esta misma razón, pueden ser fácilmentecaptados o cedidos por los átomos. Estos materiales pueden cargarseeléctricamente y además conducir con facilidad una corriente eléctrica.
Ejemplos de conductores: metales, madera húmeda, agua potable, inclusonuestro cuerpo.
1.3 Métodos de carga eléctrica
Se denomina “cargar un cuerpo” al proceso de quitar o agregar electrones,con el fin de llevarlo desde un estado eléctricamente neutro a un estadocargado. Los métodos para cargar un cuerpo son, básicamente:
a. Contacto
Si un conductor neutro se pone en contacto con un conductor cargado, seproduce una transferencia de carga, de modo que después del proceso ambosconductores quedan con una carga del mismo signo que la carga del conductorinicialmente cargado.
El valor de la carga final de cada cuerpo depende del tamaño y de la formade las cargas puestas en contacto.
Al establecerse el contacto se produce una transferencia y redistribución decarga, pero en cualquier caso la cantidad de carga transferida no es fácil decalcular. Lo único que se puede afirmar es que se cumple el Principio deconservación de carga eléctrica.
Además, la carga eléctrica cumple con el principio de conservación de lacarga, lo que implica que en proceso de contacto, no se crean ni se destruyencargas, sino que sólo se transfieren de un cuerpo a otro.
b. Inducción
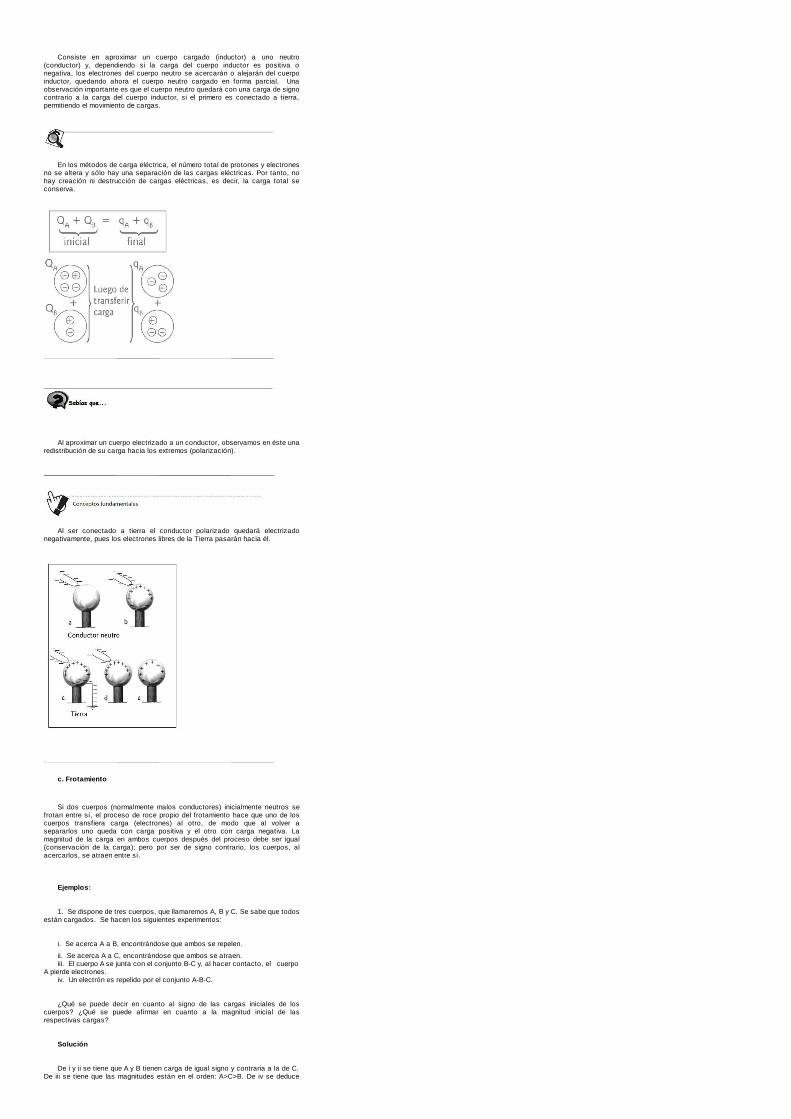
Consiste en aproximar un cuerpo cargado (inductor) a uno neutro(conductor) y, dependiendo si la carga del cuerpo inductor es positiva onegativa, los electrones del cuerpo neutro se acercarán o alejarán del cuerpoinductor, quedando ahora el cuerpo neutro cargado en forma parcial. Unaobservación importante es que el cuerpo neutro quedará con una carga de signocontrario a la carga del cuerpo inductor, si el primero es conectado a tierra,permitiendo el movimiento de cargas.
En los métodos de carga eléctrica, el número total de protones y electronesno se altera y sólo hay una separación de las cargas eléctricas. Por tanto, nohay creación ni destrucción de cargas eléctricas, es decir, la carga total seconserva.
Al aproximar un cuerpo electrizado a un conductor, observamos en éste unaredistribución de su carga hacia los extremos (polarización).
Al ser conectado a tierra el conductor polarizado quedará electrizadonegativamente, pues los electrones libres de la Tierra pasarán hacia él.
c. Frotamiento
Si dos cuerpos (normalmente malos conductores) inicialmente neutros sefrotan entre sí, el proceso de roce propio del frotamiento hace que uno de loscuerpos transfiera carga (electrones) al otro, de modo que al volver asepararlos uno queda con carga positiva y el otro con carga negativa. Lamagnitud de la carga en ambos cuerpos después del proceso debe ser igual(conservación de la carga); pero por ser de signo contrario, los cuerpos, alacercarlos, se atraen entre sí.
Ejemplos:
1. Se dispone de tres cuerpos, que llamaremos A, B y C. Se sabe que todosestán cargados. Se hacen los siguientes experimentos:
i. Se acerca A a B, encontrándose que ambos se repelen.
ii. Se acerca A a C, encontrándose que ambos se atraen.iii. El cuerpo A se junta con el conjunto B-C y, al hacer contacto, el cuerpo
A pierde electrones.iv. Un electrón es repelido por el conjunto A-B-C.
¿Qué se puede decir en cuanto al signo de las cargas iniciales de loscuerpos? ¿Qué se puede afirmar en cuanto a la magnitud inicial de lasrespectivas cargas?
Solución
De i y ii se tiene que A y B tienen carga de igual signo y contraria a la de C.De iii se tiene que las magnitudes están en el orden: A>C>B. De iv se deduce
que inicialmente A y B tiene carga (-) y C (+).
2. Se dispone de una peineta y un pedazo de tela. La peineta se frotacontra el trozo de tela, con el fin de cargarla. ¿Es posible que después de esteproceso la peineta y la tela se repelan, o necesariamente deben atraerse?
Solución
No, pues el proceso de frotamiento deja a ambos cuerpos cargados concarga opuesta, lo que debe generar una atracción y no una repulsión.
Existen tres maneras de cargar un cuerpo:
• Contacto: Ambos cuerpos quedan con cargas del mismo signo
• Inducción: Este método sólo produce una polarización, el cuerpo inducidono se carga a menos que se conecte a tierra.
• Frotamiento: Los cuerpos quedan finalmente cargados con distinto signo.
En algunos casos, cuando un cuerpo que ha sido electrizado se acerca aotro se producen chispas, las que suelen ser visibles en la oscuridad. Estoqueda en evidencia al sacarse rápidamente algunas prendas de vestir; en ladescarga que recibimos al bajarnos de algunos vehículos después de haberviajado en ellos, etc.
3. Dos hojas de un mismo tipo de papel son frotadas entre sí. ¿Quedaránelectrizadas? ¿Y si frotamos dos barras hechas de un mismo tipo de plástico?
Solución
Cuando se frotan dos cuerpos sólidos hechos de una misma sustancia, nohay traspaso de electrones de uno hacia el otro, y por tanto, no se electrizan.
4. Cuando frotamos con seda una barra de vidrio, ésta queda electrizadapositivamente. Cuando frotamos una barra de goma con lana, ésta quedaelectrizada negativamente.
Considerando lo anterior:
a. ¿El trozo de lana quedó electrizada?b. ¿Cuál es el signo de la carga en la tela de lana?c. ¿Cuál de los dos cuerpos recibió electrones?d. ¿Cuál de los dos cuerpos quedó con exceso de protones?
Solución
a. Sí.b. Positiva.c. La goma.d. La lana.
5. Se sabe que el cuerpo humano es capaz de conducir cargas eléctricas.¿Por qué , entonces, una persona con una barra metálica en sus manos noconsigue electrizarla por frotamiento?
Solución
La barra cede su carga a la tierra a través del cuerpo de la persona.
6. Un autobús en movimiento adquiere carga eléctrica debido al roce con elaire.
a. Si el ambiente del lugar es seco. ¿El autobús permanecerá electrizado?b. Al asirse de un autobús para subirse en él, una persona “recibirá un
choque”. ¿Por qué?c. Este hecho no es común en climas húmedos. ¿Por qué?
Solución
a) Sí los neumáticos (que son aislantes) impiden que el autobús ceda sucarga a la tierra.
b) El autobús cede su carga a la tierra a través del cuerpo de la persona, yello provoca el choque eléctrico.
c) En un ambiente húmedo el autobús no llega a adquirir una cargaeléctrica considerable.
En los climas húmedos, los cuerpos metálicos electrizados, aun cuandoestén apoyados sobre aislantes, terminan por descargarse después de ciertotiempo. Aun cuando el aire atmosférico sea aislante, la presencia de humedadhace que se vuelva conductor.

7. Dos esferas conductoras aisladas tienen cargas 10 C y –6 Crespectivamente. Las esferas son conectadas mediante un cable cuidando deque no haya fuga de cargas al exterior. Después de retirado el alambre.
¿Cuánto valen las cargas de ambas esferas?
Solución
QT = 10 + –6 = 4 [C]. Esta carga neta se distribuirá entre ambas esferas. Nose puede saber el valor de cada carga individual después de la interacción, puesno se sabe si los materiales y/o sus dimensiones son iguales.
Sólo que sus cargas individuales serán del mismo signo (en este caso,positivas) y que su suma algebraica será 4 [C].
8. Una barra electrizada negativamente se coloca cerca de un cuerpometálico AB (no electrizado), como muestra la figura:
a. ¿Hacia dónde se desplazarán los electrones libres de este cuerpo
metálico?b. ¿Cuál es el signo de la carga que aparece en A? ¿Y en B?c. ¿Cómo se denomina esta separación de cargas que ocurrió en el cuerpo
metálico?
Solución:
a. Hacia B.b. Positiva en A y negativa en B.c. Polarización.
9. Un cuerpo electrizado con carga positiva se acerca a la bolita de unpéndulo eléctrostático. Si la bolita fuera
a. atraída por el cuerpo, ¿podríamos concluir que está electrizadanegativamente?
b. repelida, ¿podríamos concluir que posee carga positiva?
Solución:
a. No, porque también sería atraída si estuviese neutra.b. Sí.
2. Electrodinámica
La característica esencial de los conductores, sean sólidos, líquidos ogaseosos, consiste en que disponen de partículas cargadas (electrones) quepueden moverse con bastante libertad bajo la acción de campos eléctricos.Cuando un conductor eléctricamente descargado se pone en contacto con otrocargado se produce un desplazamiento de la carga entre ellos, por efecto de lasfuerzas eléctricas. Si ambos están aislados, el movimiento de las cargas libresdurará unos instantes. El sistema de cargas encuentra una configuración deequilibrio en que las fuerzas eléctricas que se ejercen sobre cada una de lascargas se compensan mutuamente.
Esto es lo que sucede cuando un conductor eléctrico se conecta por uno desus extremos a un solo extremo de una pila o batería. Sin embargo, cuando seconecta el otro extremo del conductor al segundo polo, se produce unmovimiento continuo de cargas en el conductor. Se tiene en tal caso unacorriente eléctrica. La rama de la física que se ocupa del estudio de este tipo demovimiento de las cargas eléctricas a través de un conductor recibe el nombrede electrodinámica.
Dos leyes de naturaleza experimental descubiertas por Ohm y Joule,respectivamente, aportan algunas relaciones que facilitan el estudio científicode la corriente eléctrica.
2.1 Corriente eléctrica
La noción de corriente eléctrica corresponde al de transporte de cargaeléctrica de un punto a otro. La importancia de dicho transporte en términos decantidad se expresa mediante la magnitud e intensidad de corriente eléctrica quese define como la carga total que circula por un conductor en una unidad detiempo. En forma de ecuación se puede escribir como:
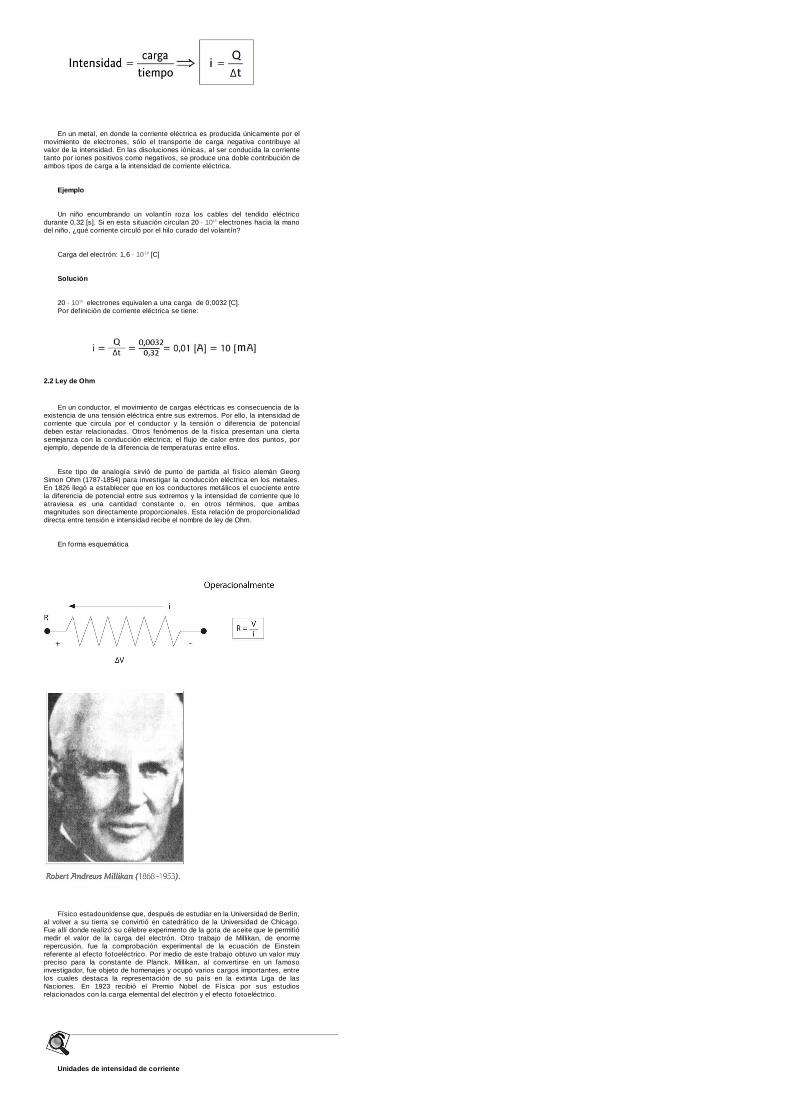
En un metal, en donde la corriente eléctrica es producida únicamente por elmovimiento de electrones, sólo el transporte de carga negativa contribuye alvalor de la intensidad. En las disoluciones iónicas, al ser conducida la corrientetanto por iones positivos como negativos, se produce una doble contribución deambos tipos de carga a la intensidad de corriente eléctrica.
Ejemplo
Un niño encumbrando un volantín roza los cables del tendido eléctricodurante 0,32 [s]. Si en esta situación circulan 20 · 1015 electrones hacia la manodel niño, ¿qué corriente circuló por el hilo curado del volantín?
Carga del electrón: 1,6 · 10-19 [C]
Solución
20 · 1015 electrones equivalen a una carga de 0,0032 [C].Por definición de corriente eléctrica se tiene:
2.2 Ley de Ohm
En un conductor, el movimiento de cargas eléctricas es consecuencia de laexistencia de una tensión eléctrica entre sus extremos. Por ello, la intensidad decorriente que circula por el conductor y la tensión o diferencia de potencialdeben estar relacionadas. Otros fenómenos de la física presentan una ciertasemejanza con la conducción eléctrica; el flujo de calor entre dos puntos, porejemplo, depende de la diferencia de temperaturas entre ellos.
Este tipo de analogía sirvió de punto de partida al físico alemán GeorgSimon Ohm (1787-1854) para investigar la conducción eléctrica en los metales.En 1826 llegó a establecer que en los conductores metálicos el cuociente entrela diferencia de potencial entre sus extremos y la intensidad de corriente que loatraviesa es una cantidad constante o, en otros términos, que ambasmagnitudes son directamente proporcionales. Esta relación de proporcionalidaddirecta entre tensión e intensidad recibe el nombre de ley de Ohm.
En forma esquemática
Físico estadounidense que, después de estudiar en la Universidad de Berlín,al volver a su tierra se convirtió en catedrático de la Universidad de Chicago.Fue allí donde realizó su célebre experimento de la gota de aceite que le permitiómedir el valor de la carga del electrón. Otro trabajo de Millikan, de enormerepercusión, fue la comprobación experimental de la ecuación de Einsteinreferente al efecto fotoeléctrico. Por medio de este trabajo obtuvo un valor muypreciso para la constante de Planck. Millikan, al convertirse en un famosoinvestigador, fue objeto de homenajes y ocupó varios cargos importantes, entrelos cuales destaca la representación de su país en la extinta Liga de lasNaciones. En 1923 recibió el Premio Nobel de Física por sus estudiosrelacionados con la carga elemental del electrón y el efecto fotoeléctrico.
Unidades de intensidad de corriente
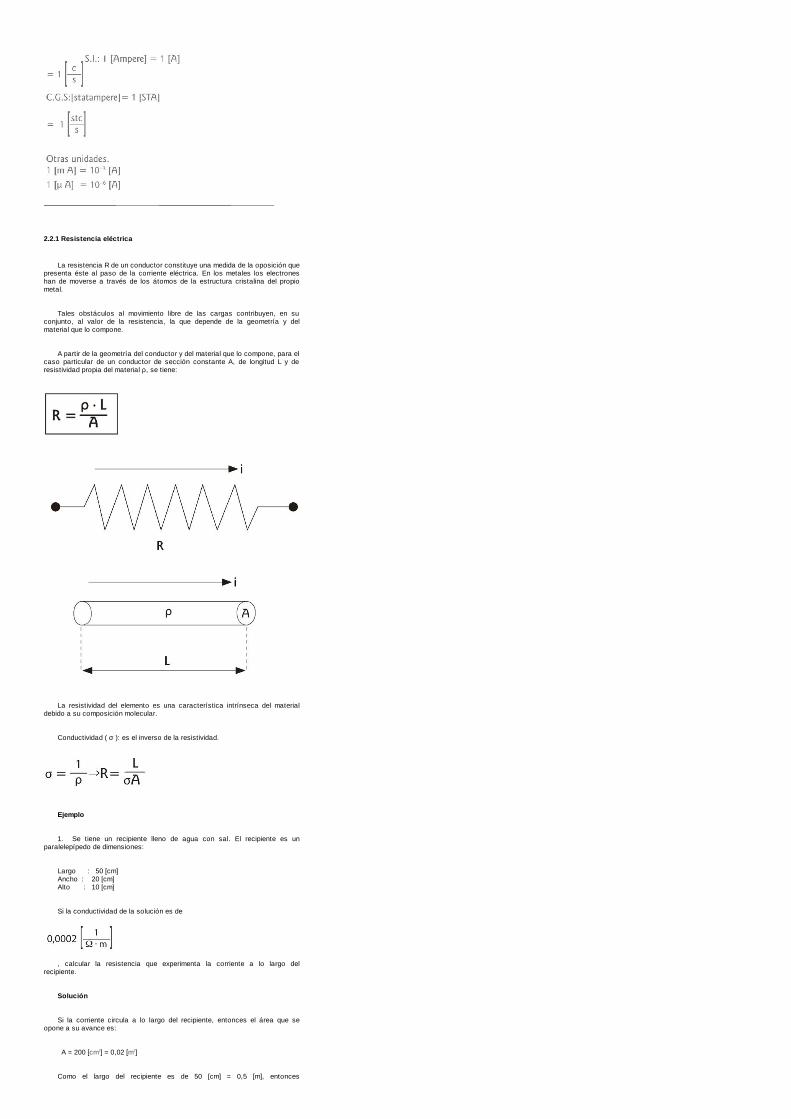
2.2.1 Resistencia eléctrica
La resistencia R de un conductor constituye una medida de la oposición quepresenta éste al paso de la corriente eléctrica. En los metales los electroneshan de moverse a través de los átomos de la estructura cristalina del propiometal.
Tales obstáculos al movimiento libre de las cargas contribuyen, en suconjunto, al valor de la resistencia, la que depende de la geometría y delmaterial que lo compone.
A partir de la geometría del conductor y del material que lo compone, para elcaso particular de un conductor de sección constante A, de longitud L y deresistividad propia del material ρ, se tiene:
La resistividad del elemento es una característica intrínseca del materialdebido a su composición molecular.
Conductividad ( σ ): es el inverso de la resistividad.
Ejemplo
1. Se tiene un recipiente lleno de agua con sal. El recipiente es unparalelepípedo de dimensiones:
Largo : 50 [cm]Ancho : 20 [cm]Alto : 10 [cm]
Si la conductividad de la solución es de
, calcular la resistencia que experimenta la corriente a lo largo delrecipiente.
Solución
Si la corriente circula a lo largo del recipiente, entonces el área que seopone a su avance es:
A = 200 [cm2] = 0,02 [m2]
Como el largo del recipiente es de 50 [cm] = 0,5 [m], entonces

reemplazamos directamente en la fórmula:
2. Si un alambre tiene una resistencia R, ¿qué resistencia tendrá otroalambre de igual longitud y naturaleza, pero de doble diámetro?
La resistencia disminuye a la cuarta parte.
2.2.2 Resistencia y temperatura
La resistividad de todas las sustancias conductoras varía con latemperatura. En los metales, un aumento de la temperatura produce un aumentode la resistencia, pues al aumentar la temperatura aumenta la energía cinéticade las moléculas que componen el material en esa situación los electrones librespresentan mayores probabilidades de colisionar con otras partículasaumentando asimismo, cada vez más la temperatura.
R = R0·(1 ± α (t - t0))
R0 es la resistencia del conductor a 0°C
Pordefinición, el Ampere constituye una Unidad Fundamental (o patrón) del S.I., noasí el Coulomb.
Físico francés, nacido en Lyon, fue uno de los fundadores delelectromagnetismo. Niño prodigio que dominaba las matemáticas a los 12 años,se convirtió más tarde en profesor de esta disciplina, además de enseñartambién Física y Química en escuelas superiores de su país.
No preocupamos solamente de las unidades correspondientes al sistema S.I.
R = 1 [Ohm] = 1 [V/A] = 1 Ω
Unidad de resistividad
ρ = [Ω · m]
Unidad de conductividad
En el S.I.
Experimentalmente se sabe que α es positivo para los conductoresmetálicos y negativo para el resto de los conductores. Es constante y propiopara cada conductor.
Ejemplo
Un filamento de Wolframio (ρ= 0,059 [Ω mm2/m] y α = 0,0045 [1/°C]) tiene 10[cm] de largo y 0,1 [mm] de diámetro a 0°C.
¿Qué variación experimenta su resistencia al elevarse su temperatura hasta los 2.500°C?
Solución
Luego
R = R0 (1 + a D t)R = 0,75 (1 + 0,045 · 2500)R = 9,12 [Ω]Δ R = 8,37 [Ω]
2.2.3 El significado energético de la ley de Ohm
Dado que la diferencia de potencial V constituye una energía por unidad decarga, la ley de Ohm puede ser interpretada en términos de energía. Lascolisiones de los electrones en los metales con los nudos de la red cristalinallevan consigo una disipación de energía eléctrica.
Dicho fenómeno es el responsable de la pérdida o caída de potencial V quese detecta, en mayor o menor medida, entre los extremos de un conductor eindica que cada unidad de carga pierde energía al pasar de uno a otro punto arazón de 1 joules por cada coulomb de carga que lo atraviese.
Si se aplica el principio general de conservación de la energía a losfenómenos eléctricos, la ley de Ohm puede ser considerada como una ecuaciónde conservación, en que el primer miembro representa la energía perdida en elcircuito por cada unidad de carga en movimiento y, el segundo, la energíacedida al exterior por cada coulomb que circula entre los puntos considerados.
La diferencia de potencial entre los extremos de la resistencia se denominatambién “caída de potencial”, “voltaje” o “tensión” a través de la resistencia.
Ejemplo
A una persona se le aplica una diferencia de potencial de 220 [V] entre cadamano. Si su resistencia eléctrica es de 5000 [Ω], ¿cuál es la corriente quecircula por su corazón?
Solución
De la Ley de Ohm se obtiene directamente:
Suficiente para provocar un paro cardíaco si se mantiene la situaciónvarios segundos.
Materiales eléctricos
Conductor pequeñoρ = 0
Buen conductor (ρ pequeño)ρ ≅ 0
Mal conductor (ρ grande)
Aislante idealρ → ∞
Georg Simon Ohm: Nació en Alemania el 16 marzo de 1787. Estudiomatemática y física, materias de las que impartió clases en diversos colegios yescuelas. En 1849 fue nombrado catedrático de la Universidad de Munich,ciudad donde murió el 7 de julio de 1854. Se dedicó al estudio de la corrienteeléctrica y de las relaciones entre las magnitudes eléctricas de los circuitos.Posteriormente investigó en otros campos, como la acústica y la óptica.Enunció la ley que lleva su nombre y estableció una terminología científica paracircuitos eléctricos basada en una analogía con un circuito hidráulico. Señalóel fenómeno de polarización de las pilas. En su honor, la unidad de resistenciaeléctrica recibe el nombre de ohmio.
2.3 Circuitos de corriente continua
Un circuito eléctrico está formado por la asociación de elementosconductores que hacen posible el mantenimiento, por su interior, de unacorriente eléctrica. Si los generadores producen una diferencia de potencialconstante entre sus bornes o polos, la corriente producida será continua. Tal esel caso de las pilas y de las baterías.
En los circuitos de corriente continua pueden distinguirse básicamente dostipos de elementos: los generadores y los receptores. Los primeros aportan alcircuito la energía necesaria para mantener la corriente eléctrica; los segundosdisipan energía eléctrica principalmente en forma de calor, como es el caso delas resistencias, o bien la convierten en otra forma de energía, como sucede enlos motores. Una pila en un circuito eléctrico se representa mediante el símbolo:
que refleja la polaridad del generador. Una resistencia se representa
por el símbolo:
2.3.1 Disposición de resistencias
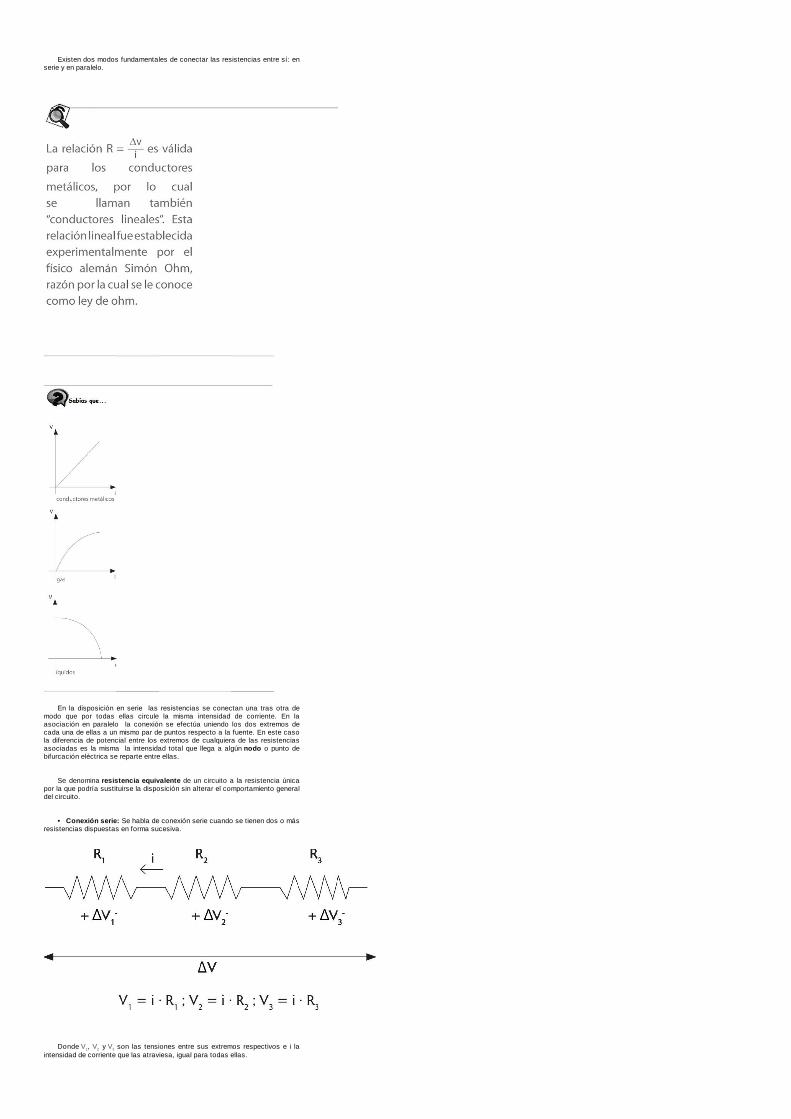
Existen dos modos fundamentales de conectar las resistencias entre sí: enserie y en paralelo.
En la disposición en serie las resistencias se conectan una tras otra demodo que por todas ellas circule la misma intensidad de corriente. En laasociación en paralelo la conexión se efectúa uniendo los dos extremos decada una de ellas a un mismo par de puntos respecto a la fuente. En este casola diferencia de potencial entre los extremos de cualquiera de las resistenciasasociadas es la misma la intensidad total que llega a algún nodo o punto debifurcación eléctrica se reparte entre ellas.
Se denomina resistencia equivalente de un circuito a la resistencia únicapor la que podría sustituirse la disposición sin alterar el comportamiento generaldel circuito.
• Conexión serie: Se habla de conexión serie cuando se tienen dos o másresistencias dispuestas en forma sucesiva.
Donde V1, V2 y V3 son las tensiones entre sus extremos respectivos e i laintensidad de corriente que las atraviesa, igual para todas ellas.
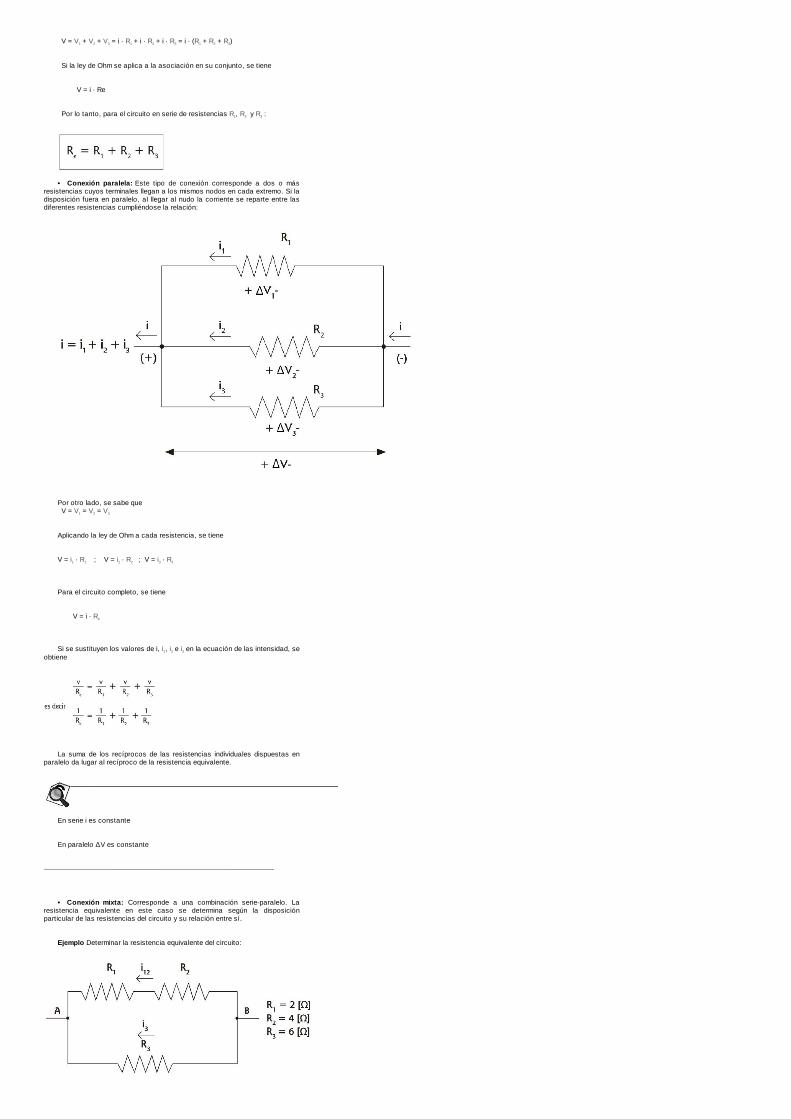
V = V1 + V2 + V3 = i · R1 + i · R2 + i · R3 = i · (R1 + R2 + R3)
Si la ley de Ohm se aplica a la asociación en su conjunto, se tiene
V = i · Re
Por lo tanto, para el circuito en serie de resistencias R1, R2 y R3 :
• Conexión paralela: Este tipo de conexión corresponde a dos o másresistencias cuyos terminales llegan a los mismos nodos en cada extremo. Si ladisposición fuera en paralelo, al llegar al nudo la corriente se reparte entre lasdiferentes resistencias cumpliéndose la relación:
Por otro lado, se sabe que V = V1 = V2 = V3
Aplicando la ley de Ohm a cada resistencia, se tiene
V = i1 · R1 ; V = i2 · R2 ; V = i3 · R3
Para el circuito completo, se tiene
V = i · Re
Si se sustituyen los valores de i, i1, i2 e i3 en la ecuación de las intensidad, seobtiene
La suma de los recíprocos de las resistencias individuales dispuestas enparalelo da lugar al recíproco de la resistencia equivalente.
En serie i es constante
En paralelo ΔV es constante
• Conexión mixta: Corresponde a una combinación serie-paralelo. Laresistencia equivalente en este caso se determina según la disposiciónparticular de las resistencias del circuito y su relación entre sí.
Ejemplo Determinar la resistencia equivalente del circuito:
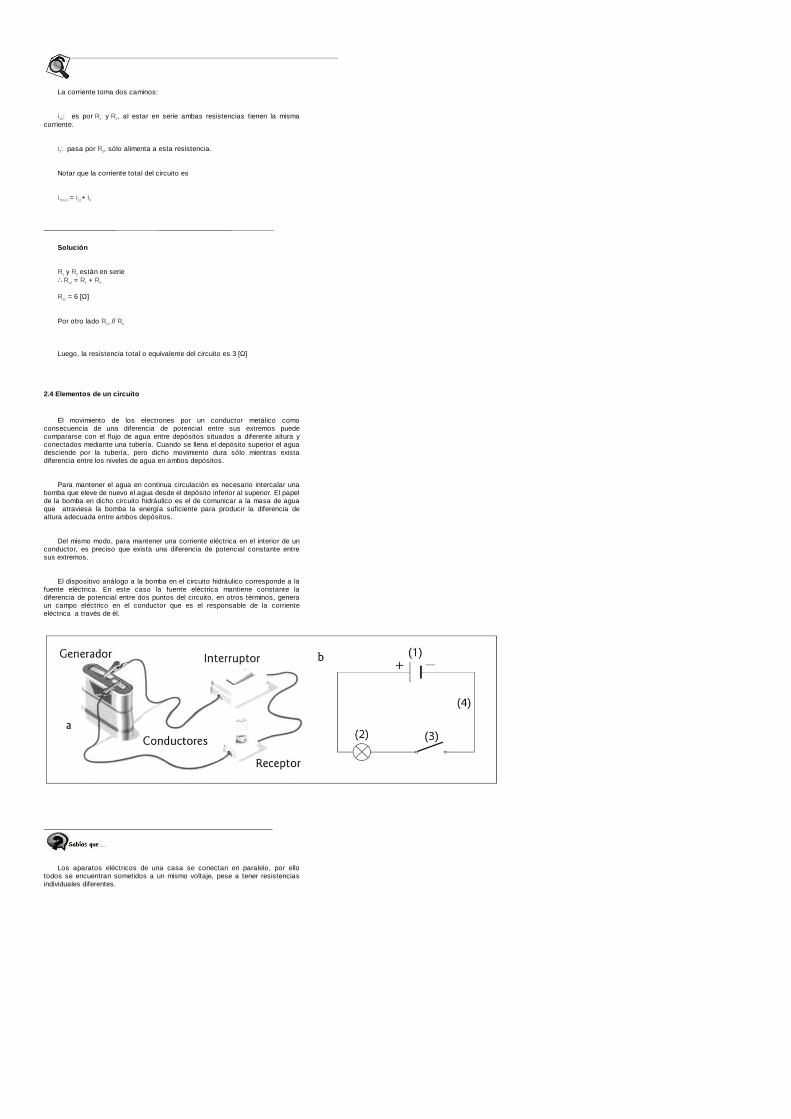
La corriente toma dos caminos:
i12: es por R1 y R2, al estar en serie ambas resistencias tienen la mismacorriente.
i3: pasa por R3, sólo alimenta a esta resistencia.
Notar que la corriente total del circuito es
iTota l = i12+ i3
Solución
R1 y R2 están en serie∴ R12 = R1 + R2
R12 = 6 [Ω]
Por otro lado R12 // R3
Luego, la resistencia total o equivalente del circuito es 3 [Ω]
2.4 Elementos de un circuito
El movimiento de los electrones por un conductor metálico comoconsecuencia de una diferencia de potencial entre sus extremos puedecompararse con el flujo de agua entre depósitos situados a diferente altura yconectados mediante una tubería. Cuando se llena el depósito superior el aguadesciende por la tubería, pero dicho movimiento dura sólo mientras existadiferencia entre los niveles de agua en ambos depósitos.
Para mantener el agua en continua circulación es necesario intercalar unabomba que eleve de nuevo el agua desde el depósito inferior al superior. El papelde la bomba en dicho circuito hidráulico es el de comunicar a la masa de aguaque atraviesa la bomba la energía suficiente para producir la diferencia dealtura adecuada entre ambos depósitos.
Del mismo modo, para mantener una corriente eléctrica en el interior de unconductor, es preciso que exista una diferencia de potencial constante entresus extremos.
El dispositivo análogo a la bomba en el circuito hidráulico corresponde a lafuente eléctrica. En este caso la fuente eléctrica mantiene constante ladiferencia de potencial entre dos puntos del circuito, en otros términos, generaun campo eléctrico en el conductor que es el responsable de la corrienteeléctrica a través de él.
Los aparatos eléctricos de una casa se conectan en paralelo, por ellotodos se encuentran sometidos a un mismo voltaje, pese a tener resistenciasindividuales diferentes.
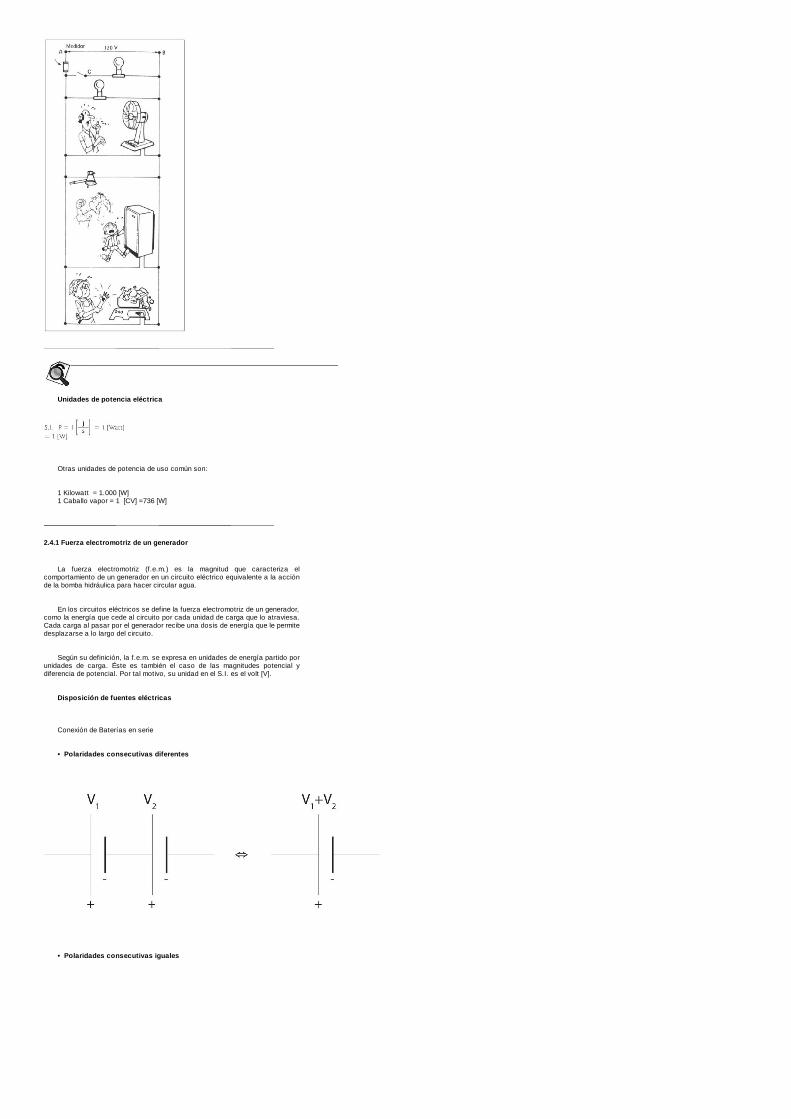
Unidades de potencia eléctrica
Otras unidades de potencia de uso común son:
1 Kilowatt = 1.000 [W]1 Caballo vapor = 1 [CV] =736 [W]
2.4.1 Fuerza electromotriz de un generador
La fuerza electromotriz (f.e.m.) es la magnitud que caracteriza elcomportamiento de un generador en un circuito eléctrico equivalente a la acciónde la bomba hidráulica para hacer circular agua.
En los circuitos eléctricos se define la fuerza electromotriz de un generador,como la energía que cede al circuito por cada unidad de carga que lo atraviesa.Cada carga al pasar por el generador recibe una dosis de energía que le permitedesplazarse a lo largo del circuito.
Según su definición, la f.e.m. se expresa en unidades de energía partido porunidades de carga. Éste es también el caso de las magnitudes potencial ydiferencia de potencial. Por tal motivo, su unidad en el S.I. es el volt [V].
Disposición de fuentes eléctricas
Conexión de Baterías en serie
• Polaridades consecutivas diferentes
• Polaridades consecutivas iguales
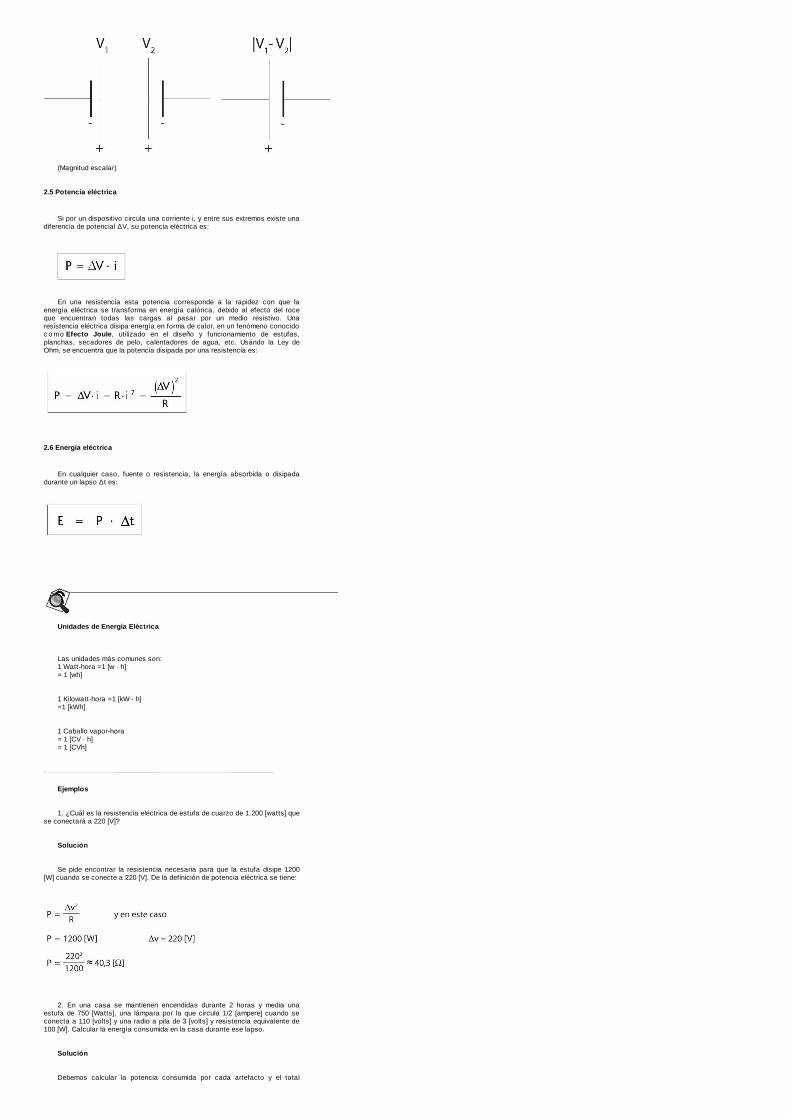
(Magnitud escalar)
2.5 Potencia eléctrica
Si por un dispositivo circula una corriente i, y entre sus extremos existe unadiferencia de potencial ΔV, su potencia eléctrica es:
En una resistencia esta potencia corresponde a la rapidez con que laenergía eléctrica se transforma en energía calórica, debido al efecto del roceque encuentran todas las cargas al pasar por un medio resistivo. Unaresistencia eléctrica disipa energía en forma de calor, en un fenómeno conocidoc o mo Efecto Joule, utilizado en el diseño y funcionamiento de estufas,planchas, secadores de pelo, calentadores de agua, etc. Usando la Ley deOhm, se encuentra que la potencia disipada por una resistencia es:
2.6 Energía eléctrica
En cualquier caso, fuente o resistencia, la energía absorbida o disipadadurante un lapso Δt es:
Unidades de Energía Eléctrica
Las unidades más comunes son:1 Watt-hora =1 [w · h]= 1 [wh]
1 Kilowatt-hora =1 [kW · h]=1 [kWh]
1 Caballo vapor-hora= 1 [CV · h]= 1 [CVh]
Ejemplos
1. ¿Cuál es la resistencia eléctrica de estufa de cuarzo de 1.200 [watts] quese conectará a 220 [V]?
Solución
Se pide encontrar la resistencia necesaria para que la estufa disipe 1200[W] cuando se conecte a 220 [V]. De la definición de potencia eléctrica se tiene:
2. En una casa se mantienen encendidas durante 2 horas y media unaestufa de 750 [Watts], una lámpara por la que circula 1/2 [ampere] cuando seconecta a 110 [volts] y una radio a pila de 3 [volts] y resistencia equivalente de100 [W]. Calcular la energía consumida en la casa durante ese lapso.
Solución
Debemos calcular la potencia consumida por cada artefacto y el total
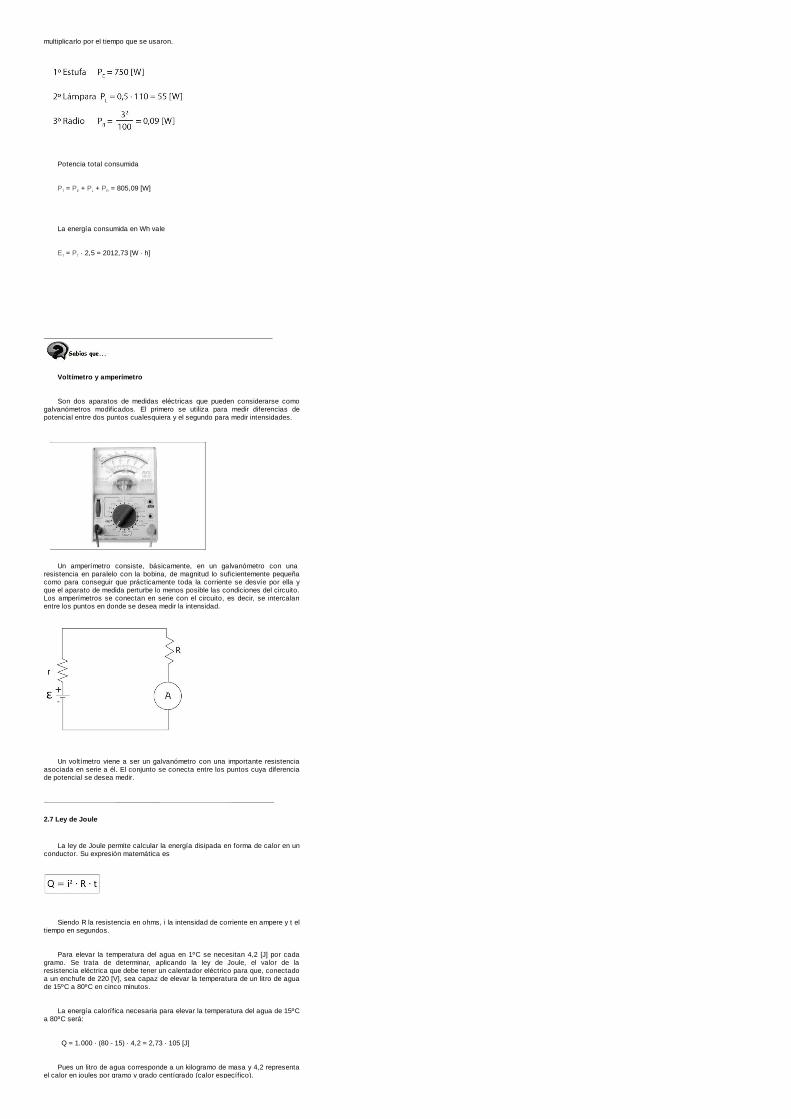
multiplicarlo por el tiempo que se usaron.
Potencia total consumida
PT = PE + PL + PR = 805,09 [W]
La energía consumida en Wh vale
ET = PT · 2,5 = 2012,73 [W · h]
Voltímetro y amperímetro
Son dos aparatos de medidas eléctricas que pueden considerarse comogalvanómetros modificados. El primero se utiliza para medir diferencias depotencial entre dos puntos cualesquiera y el segundo para medir intensidades.
Un amperímetro consiste, básicamente, en un galvanómetro con una resistencia en paralelo con la bobina, de magnitud lo suficientemente pequeñacomo para conseguir que prácticamente toda la corriente se desvíe por ella yque el aparato de medida perturbe lo menos posible las condiciones del circuito.Los amperímetros se conectan en serie con el circuito, es decir, se intercalanentre los puntos en donde se desea medir la intensidad.
Un voltímetro viene a ser un galvanómetro con una importante resistenciaasociada en serie a él. El conjunto se conecta entre los puntos cuya diferenciade potencial se desea medir.
2.7 Ley de Joule
La ley de Joule permite calcular la energía disipada en forma de calor en unconductor. Su expresión matemática es
Siendo R la resistencia en ohms, i la intensidad de corriente en ampere y t eltiempo en segundos.
Para elevar la temperatura del agua en 1ºC se necesitan 4,2 [J] por cadagramo. Se trata de determinar, aplicando la ley de Joule, el valor de laresistencia eléctrica que debe tener un calentador eléctrico para que, conectadoa un enchufe de 220 [V], sea capaz de elevar la temperatura de un litro de aguade 15ºC a 80ºC en cinco minutos.
La energía calorífica necesaria para elevar la temperatura del agua de 15ºCa 80ºC será:
Q = 1.000 · (80 - 15) · 4,2 = 2,73 · 105 [J]
Pues un litro de agua corresponde a un kilogramo de masa y 4,2 representael calor en joules por gramo y grado centígrado (calor específico).
Dado que se dispone del valor de la tensión, pero no de la Intensidad, seránecesario transformar la ley de Joule de modo que en la fórmula correspondienteaparezca aquélla y no ésta. Recurriendo a la ley de Ohm V = i · R se tiene:
La cantidad de calor desarrollado por una corriente en un conductor deresistencia constante se puede determinar la siguiente expresión:
Al pasar por una resistencia las cargas eléctricas pierden energía eléctrica,que se transforma totalmente en calor. Este fenómeno se denomina “efectoJoule”.
Todos los aparatos eléctricos que se emplean para calentamiento se basanen el efecto Joule.
3. Generación de energía eléctrica
La energía eléctrica para un circuito puede ser proporcionada por una pila ouna batería, si se requiere un bajo consumo, como por ejemplo, para encenderuna linterna o hacer funcionar un reloj.
En el caso de los electrodomésticos, como lavadoras, refrigeradores oaspiradoras, estas fuentes de energía eléctrica son insuficientes y es necesarioobtener la energía de grandes generadores.
Para la transformación de energía de algún tipo en energía eléctrica, sepueden utilizar plantas o centrales Hidroeléctricas, Termoeléctricas, Eólicas,Nucleares, Fotovoltaicas, Solares, Geotérmicas, Maremotrices.
Los factores determinantes del tipo de central generadora de energíaeléctrica en un país son su geografía, su clima y los recursos naturales queposea.
3.1 Centrales hidroeléctricas
En Chile, las centrales hidroeléctricas son muy importantes, debido a lagran cantidad de ríos existentes en el territorio nacional.
Una gran ventaja de las centrales hidroeléctricas es la transformaciónlimpia de la energía, ya que no arroja residuos contaminantes.

Otras ventajas son el bajo costo de operación, ya que no requiere de ningúntipo de combustible adicional.
Entre las desventajas, se puede indicar que el entorno natural requerido poruna central hidroeléctrica está por lo general alejado de los centros deconsumo, lo que obliga a establecer un sistema de transmisión, elevando deesta forma los costos de consumo.
Otra desventaja es que la generación de energía eléctrica puede variar porlas condiciones estacionales del año (año seco, año lluvioso).
Una central hidroeléctrica es un emplazamiento de construcciones yequipamiento que tiene por finalidad la generación de energía eléctrica a partirdel aprovechamiento del potencial eléctrico existente en un río.
El potencial eléctrico es debido al flujo de agua (energía cinética) y a laexistencia de desniveles (energía potencial gravitatoria) a lo largo del curso deun río.
El flujo hidráulico aprovechable puede darse:
• En forma natural, cuando el desnivel lo provoca una caída de agua, comoun salto o una catarata.
• A través de una presa. En este caso, el desnivel se crea en formaartificial.
• A través del curso natural del río, por medio de un desvío.
¿Cómo funciona una central hidroeléctrica?
• El agua es captada en una presa, que constituye un lago artificial y esconducida hasta la central de energía mediante canales, túneles y/otuberías.
• El agua cae debido a la acción de la fuerza gravitacional y acciona unasenormes turbinas. Luego de pasar por ellas, el agua es restituida al río através de un canal o dispositivo de descarga.
• La energía potencial que posee el agua, por estar a cierta altura, seconvierte en energía de movimiento al pasar por la turbina, haciendo queésta gire rápidamente, conjuntamente con el generador adosado a ella,obteniendo finalmente energía eléctrica.
• La energía generada es conducida a través de cables conductores desdelos terminales del generador hasta un transformador, cuya función es elevarel voltaje, y luego es enviada por líneas de transmisión (cablesconductores) hasta los centros de distribución
• Para controlar que la cantidad de energía sea la adecuada en los puntosde consumo, se utilizan transformadores intermedios y subestacioneseléctricas.
3.2 Centrales termoeléctricas
En Chile se utilizan centrales termoeléctricas, debido a que existen zonascon escasez de ríos o debido a que el bajo nivel de precipitaciones no permite elfuncionamiento continuo de una central hidroeléctrica.
Una central termoeléctrica es un conjunto de infraestructuras yequipamientos cuya finalidad es la generación de energía eléctrica a través deun proceso que se cumple en tres etapas:
La primera etapa consiste en la quema de un combustible, como carbón,petróleo o gas, transformando el agua en vapor.
La segunda consiste en la utilización de ese vapor, a alta presión, parahacer girar una turbina que, a su vez, acciona el generador eléctrico.
En la tercera etapa, el vapor es condensado, retornando el agua a lacaldera, lo que completa el ciclo.

¿Cómo funciona una central termoeléctrica?
• La energía mecánica obtenida por el paso del vapor a través de unaturbina hace que esta gire. Este movimiento es transmitido al generador, elque transforma la energía mecánica en energía eléctrica.
• La energía así producida es llevada a través de cables conductoresdesde los terminales del generador hasta un transformador elevador, dondese aumenta su tensión para una adecuada conducción, a través de líneasde transmisión, hasta los centros de distribución.
Los principales inconvenientes para el uso de centrales termoeléctricasson:
• Emisión de partículas contaminantes a la atmósfera, producto de laquema de combustible: La combustión del carbón provoca la emisión degran cantidad de material particulado y gases.• Elevación de la temperatura de las aguas de los ríos por la utilización deéstos para el proceso de condensación del vapor.
Por lo que se refiere al primero de los aspectos citados, esa clase decontaminación ambiental es prácticamente despreciable en el caso de lascentrales termoeléctricas de gas y escasa en el caso de las de petróleo, peroexige, sin embargo, la adopción de importantes medidas en las de carbón.
La combustión del carbón, en efecto, provoca la emisión al medio ambientede partículas y ácidos de azufre. Para impedir que estas emisiones puedanperjudicar al entorno de la planta, dichas centrales poseen chimeneas de granaltura, se están construyendo chimeneas de más de 300 metros, que dispersandichas partículas en la atmósfera, minimizando su influencia. Además, poseenfiltros electrostáticos o precipitadores que retienen buena parte de laspartículas volátiles en el interior de la central. Por lo que se refiere a lascentrales de petróleo, su emisión de partículas sólidas es muy inferior, y puedeser considerada insignificante. Sólo cabe tener en cuente la emisión de hollinesácidos, neutralizados mediante la adición de neutralizantes de la acidez; y delos óxidos de azufre minimizados por medio de diversos sistemas depurificación.
En cuanto a la contaminación térmica, ésta es combatida especialmente através de la instalación de torres de refrigeración. El agua que utiliza la central,tras ser convertida en vapor y empleada para hacer girar la turbina, es enfriadaen unos condensadores para volver posteriormente a los conductos de lacaldera. Para efectuar la operación de refrigeración, se emplean las aguas dealgún río próximo o del mar, a las cuales se transmite el calor incorporado por elagua de la central que pasa por los condensadores. Si el caudal del río espequeño, y a fin de evitar la contaminación térmica, las centralestermoeléctricas utilizan sistemas de refrigeración en circuito cerrado mediantetorres de refrigeración.
Las modificaciones realizadas para minimizar la contaminación ambientalson de vital importancia, ya que ésta produce graves daños a la salud humana,daños a los monumentos y construcciones y extinción de la fauna local.
3.3 Centrales eólicas
Todas las energías renovables provienen del Sol, con excepción de lamaremotriz y la geotérmica. El sol irradia 174.423.000.000.000 [KWH] de energíapor hora a la Tierra, de la cual alrededor del 2% es convertida en energía eólica.
La energía del viento es aprovechada por el ser humano desde tiemposremotos para la navegación a vela. Barcos con velas aparecían ya en losgrabados egipcios más antiguos (3000 a.C.). Los egipcios, los fenicios y mástarde los romanos tenían que utilizar también los remos para contrarrestar unacaracterística esencial de la energía eólica, su discontinuidad. Efectivamente,el viento cambia de intensidad y de dirección de manera impredecible, por lo quehabía que utilizar los remos en los periodos de calma o cuando no soplaba en ladirección deseada.

El molino es una máquina que transforma el viento en energía aprovechable.Esta energía proviene de la acción de la fuerza del viento sobre unas aspasoblicuas unidas a un eje común. El eje giratorio puede conectarse a varios tiposde maquinaria para moler grano, bombear agua o generar electricidad. Cuandoel eje se conecta a una carga, como una bomba, recibe el nombre de molino deviento. Si se usa para producir electricidad se le denomina generador de turbinade viento.
Una planta eólica se basa en el aprovechamiento del giro de la hélice de unmolino para generar electricidad utilizando el viento.
La hélice va conectada directamente al rotor del alternador (generador).Cuando hay viento, gira la hélice ,y por esto, gira el rotor dentro del alternador,produciendo corriente alterna.
Como no siempre hay viento, se necesita una fuente auxiliar, que permitaregular en todo momento el consumo.
La energía eólica es considerada una de las más beneficiosas para lahumanidad entre las energías alternativas, ya que no produce contaminaciónambiental por material particulado o gases.
Entre las desventajas del uso de plantas eólicas está la situacióngeográfica, ya que deben ubicarse en lugares apartados y ventosos. Muchas deesas áreas coinciden con las rutas migratorias de las aves, causando la muertede éstas al chocar con las hélices.
Otra desventaja es la contaminación acústica, ya que son bastanteruidosas.
3.4 Centrales nucleares
Las centrales nucleares utilizan de combustible algún elemento radiactivoque en un proceso de fisión genera calor que permite calentar agua,transformándola en vapor de agua a gran presión, lo que permite mover unaturbina conectada a un generador.
Los elementos de elevado peso atómico, como el uranio, el torio o elplutonio, tienen densos núcleos compuestos por gran cantidad de protones yneutrones. Algunos isótopos de estos elementos, como el uranio 235, poseennúcleos inestables.
Si los golpeamos con un neutrón, se dividen en dos partes, produciendo unagran cantidad de energía y dos o tres neutrones. Estos neutrones podrán partira su vez dos o tres núcleos, produciendo más energía y más neutrones libreslistos para impactar con otros núcleos.
En una central nuclear el paso más complejo y delicado es aquel en dondese controla el proceso de fisión, que tiene que ser lento, de lo contrario elreactor se convertiría en una bomba atómica.
Los neutrones son controlados para que no explote el reactor medianteunas barras, generalmente de carburo de boro, que al introducirse absorbenneutrones, y se disminuye el número de fisiones, con lo cual, dependiendo decuantas barras de control se introduzcan, se generará más o menor energía.
Normalmente, se introducen las barras de tal forma, que sólo produzcan unneutrón por reacción, controlando de esta forma el proceso de fisión.
Si todas las barras de control son introducidas, se absorben todos losneutrones, con lo cual se detiene el reactor.
El reactor se refrigera para que no se caliente demasiado y funda lasprotecciones, convirtiéndose en una bomba atómica, incluso cuando estádetenido, ya que la radiación hace que el reactor permanezca caliente.
3.5 Centrales fotovoltaicas

Las centrales fotovoltaicas producen electricidad sin necesidad de turbinasni generadores, utilizando la propiedad que tienen ciertos materiales de generaruna corriente de electrones cuando incide sobre ellos radiaciónelectromagnética (en general luz visible).
La clave del funcionamiento de las células fotovoltaicas está en ladisposición en forma de sandwich de materiales dotados de diferente forma, demanera que unos tengan exceso de electrones y otros, por el contrario,“huecos” con déficit de electrones. La luz solar porta energía que arranca loselectrones sobrantes de una capa y los hace moverse en dirección a los“huecos” de la otra capa.
El resultado es la creación de flujo de electrones excitados, y por lo tanto,un voltaje eléctrico. Este voltaje conseguido es muy pequeño: por ejemplo, unailuminación con una potencia de 1 kW por metro cuadrado genera apenas unvoltaje de 0,5 voltios.
La solución consiste en conectar en serie gran número de células: en elejemplo anterior, conectando 36 células obtendremos una tensión de 18 voltios.Conectando gran número de células, podremos alcanzar el voltaje quedeseemos.
En la práctica, muchas instalaciones fotovoltaicas son pequeñas y se usanpara propósitos específicos: por ejemplo, para apoyar el suministro eléctrico deuna casa, o para señalizaciones de carretera. Pero también existen algunasgrandes instalaciones más o menos experimentales.
Numerosos laboratorios en todo el mundo trabajan para conseguir célulascapaces de convertir la luz del sol en electricidad con el mayor rendimientoposible. A medida que el rendimiento aumenta y la fabricación de las células seabarata, la electricidad fotovoltaica se hará cada vez más competitiva encomparación con las otras maneras de producir electricidad.
(http://www.unesa.net/unesa/html/sabereinvestigar/largoviaje/fotovoltaicas.htm)
Este sistema de generación es limpio, no deja residuos y tampoco traeconsecuencias para la vida humana o de la naturaleza.
Los satélites utilizan este mecanismo para abastecerse de energía eléctricamientras orbitan alrededor de la Tierra.
3.6 Centrales solares
Las centrales solares tienen similitud con las fotovoltaicas, ya que ambasaprovechan la energía solar emitida por radiación.
La central solar no transforma directamente la energía solar en energíaeléctrica, sino que opera en forma similar a las centrales termoeléctricas.
La energía solar se capta para calentar agua, evaporarla y el vapor apresión hace funcionar un generador adosado a una turbina.
La central más común y más poderosa que existe hoy es la llamada “torresolar”, la cual consta de un gran número de espejos, guiados individualmente deforma que concentren la energía del Sol sobre un receptor, montado en la partesuperior de una torre, donde se encuentra situada la caldera generadora devapor. Y el vapor obtenido se inyecta sobre los álabes de la turbina para moverel generador y así producir la energía eléctrica que todos necesitamos, y losmás importante esta se obtiene de una manera limpia y segura.
(http://www.oni.escuelas.edu.ar/olimpi98/Energia-Vs-Ambiente/solar.htm)

3.7 Centrales geotérmicas
Las centrales geotérmicas generan electricidad a partir de la explotación deyacimientos geotermales que existen en algunos lugares del planeta. El recursoprimario puede consistir en agua caliente o en vapor a alta temperatura,acumulados en formaciones geológicas subterráneas a las que se accedemediante pozos perforados en la corteza terrestre con técnicas similares a lasde las empresas petroleras.
Los yacimientos geotérmicos suelen dividirse en tres categorías:
• Yacimientos de alta temperatura: con un flujo de calor a temperaturasde entre 150 y 350 °C, comúnmente acompañados de manifestaciones comovertientes termales, suelo de vapor, fumarolas, etc.
• Yacimientos de baja temperatura: con un flujo de calor de hasta 150°C.
• Yacimientos de roca caliente: sin fluido térmico.
Para la utilización práctica de la energía geotérmica es necesaria lapresencia de yacimientos de agua cerca de estas zonas calientes.
Esta realidad a veces se pone de manifiesto de forma natural y violenta porfenómenos como el vulcanismo o los terremotos. Pero el hombre también puedeaprovechar esta fuente de calor extrayéndolo mediante perforaciones ytransfiriéndolo hacia calderas o hacia turbinas de vapor.
En lugares como Lardarello, Italia, o en Nueva Zelandia y en Costa Rica, laenergía geotérmica es una fuente importante de abastecimiento de electricidad.
De hecho, las centrales geotérmicas proveen sobre 44 billones de kilowatthora de electricidad anualmente a través del mundo y la capacidad mundialcrece en aproximadamente 9% al año.
Para producir energía eléctrica desde recursos geotérmicos, ya sea que setrate de depósitos subterráneos de vapor o de agua caliente, éstos sonexplotados de tal forma que, al salir a la superficie, el vapor hace rotar lasturbinas y se genera la electricidad.
Típicamente, el agua se devuelve al terreno para recargar el depósito ycompletar el ciclo renovable de la energía.
Desde el punto de vista de contaminación atmosférica, las plantasgeotérmicas tienen una ventaja inherente sobre las de petróleo y las de carbón,pues no hay combustión de ningún tipo. El agua geotérmica a veces contienesales y minerales disueltos cuyo tratamiento ulterior puede plantear algunadificultad.
Las plantas de vapor seco fueron el primer tipo de plantas geotérmicas(Italia 1904). En los géiseres de California del Norte, se encuentra las plantamás grande del mundo. Esta planta utiliza el vapor que viene directo de lospozos en el terreno, y lo dirige directamente a la turbina para poder producirelectricidad.
Las plantas de vapor a destellos, que son las más comunes, usan agua auna temperatura superior a 182°C.
Esta agua muy caliente es bombeada a alta presión hacia el equipo en lasuperficie, donde la presión se baja repentinamente permitiendo que parte delagua caliente “destelle” en vapor.
El vapor se usa entonces para mover el generador. El agua caliente y vaporrestantes son inyectados nuevamente al depósito.

A partir de depósitos de agua cuya temperatura está comprendida entre 150y 400ºC, se produce vapor en la superficie que, al ser enviado a las turbinas,genera electricidad.
La explotación de la energía geotérmica se hace por medio deperforaciones, según técnicas casi idénticas a las de la extracción del petróleo.
Tales modelos se dan en Italia (desde 1903 en Larderello, cuyas centralesposeen una potencia eléctrica actual de 400 MW), en Nueva Zelanda, en Japón,en Filipinas, en E.E.U.U.(en California, el campo The Geysers supera los 900MW) y en México.
(http://www.educarchile.cl/eduteca/debateenergetico/geo2.htm)
Se requieren varios parámetros para que exista un campo geotérmico: un techocompuesto de una cobertura de rocas impermeables; un deposito, o acuífero,de permeabilidad elevada, entre 300 y 2000m de profundidad; rocas fracturadasque permitan una circulación convectiva de fluidos, y por lo tanto la trasferenciade calor de la fuente a la superficie, y una fuente de calor magmático (entre 3 y10 km de profundidad a 500 o 600ºC).
3.8 Centrales maremotrices
En la antigüedad, los egipcios utilizaban la energía de las olas del mar paramover los molinos de marea.
En el siglo XIII funcionaban ruedas maremotrices en Inglaterra yposteriormente en el siglo XVIII se realizan trabajos de molienda de grano enFrancia y estados Unidos con energía maremotriz.
Las centrales maremotrices de generación de energía eléctrica aprovechanlas variaciones de altura que experimenta el nivel del mar, que en algunoslugares supera los 5 metros entre la bajamar (marea baja) y la pleamar (mareaalta).
En una central de este tipo se requiere contener el agua en un depósitoartificial durante la pleamar y soltarla durante la bajamar.
Al soltar el agua acumulada en el depósito, esta acciona generadoresconectados a turbinas y, en consecuencia, transforma la energía del mar enenergía eléctrica.
El uso de energía maremotriz no está muy extendida. De momento sólo laIndia, China, Japón y Estados Unidos han construido alguna de estas centrales.
En Europa las condiciones geográficas son idóneas para adaptar este tipode centrales, por ejemplo en el mar del Norte y las costas escandinavas. La islaescocesa de Islay cuenta con la primera turbina europea que trabaja con elmovimiento de las olas generando energía para unos 400 hogares.
Actualmente se realizan estudios de impacto ambiental, ya que este tipo deplantas puede hacer variar la estructura de los sedimentos del agua.
1. Cargas del mismo signo se repelen entre sí y cargas de distintosigno se atraen.
2. Resistencia eléctrica de un conductor es la medida de la oposiciónnatural que presenta éste al paso de la corriente.
3. Fuerza electromotriz (f.e.m.) es la magnitud que caracteriza elcomportamiento de un generador en un circuito eléctrico.
CAPÍTULO 6: MAGNETISMO
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Reconocer la importancia del magnetismo en el avance tecnológico.• Determinar la intensidad de un campo magnético.• Establecer la relación existente entre corriente eléctrica y magnetismo.• Comprender el funcionamiento de alternadores, electroimanes ytransformadores.
Las propiedades magnéticas de algunos materiales están presentes en muchascosas que usamos a diario. Las cintas de video, las tarjetas de crédito, losdisquets, los teléfonos, los motores eléctricos, etc. El magnetismo ha sidofundamental para el almacenamiento de la gran cantidad de información denuestra época.
El fenómeno del magnetismo fue conocido por los griegos desde el año 800A.C. Ellos descubrieron que ciertas piedras, ahora llamadas magnetita (Fe3O4),atraían piezas de hierro.
La leyenda adjudica el nombre de magnetita en honor al pastor Magnes, “losclavos de sus zapatos y el casquillo (o punta) de su bastón quedaronfuertemente sujetos a un campo magnético cuando se encontraba pastoreandosu rebaño”.
En 1269 Pierre de Maricourt, mediante un imán natural esférico, elaboró unmapa de las direcciones tomadas por una aguja al colocarla en diversos puntosde la superficie de la esfera. Encontró que las direcciones formaban líneas querodeaban a la esfera pasando a través de dos puntos diametralmente opuestosuno del otro, a los cuales llamo polos del imán. Experimentos subsecuentesdemostraron que cualquier imán, sin importar su forma, tiene dos polos,llamados polo norte y polo sur, los cuales presentan fuerzas que actúan entre síde manera análoga a las cargas eléctricas. Es decir, polos iguales se repelen ypolos diferentes se atraen.
En 1600 William Gilbert extendió estos experimentos a una variedad demateriales. Utilizando el hecho de que una aguja magnética (brújula) se orientaen direcciones preferidas, sugiere que la misma Tierra es un gran imánpermanente.
En 1750, John Michell (1724-1793) usó la balanza de torsión para demostrarque los polos magnéticos ejercen fuerzas de atracción y repulsión entre sí, yque estas fuerzas varían como el inverso del cuadrado de la distancia deseparación.
Aun cuando la fuerza entre dos polos magnéticos es similar a la fuerzaentre dos cargas eléctricas, existe una importante diferencia; las cargaseléctricas se pueden aislar (lo que se manifiesta en la existencia del protón y elelectrón), mientras que los polos magnéticos no se pueden separar. Esto es, lospolos magnéticos siempre están en pares. Todos los intentos por detectar unpolo aislado han fracasado. No importa cuántas veces se divida un imánpermanente, cada trozo siempre tendrá un polo norte y un polo sur.
La relación entre el magnetismo y la electricidad fue descubierta en 1819cuando, en la demostración de una clase, el científico danés Hans Oerstedencontró que la corriente eléctrica que circula por un alambre desvía la aguja deuna brújula cercana.
Poco tiempo después, André Ampere (1775-1836) obtuvo las leyescuantitativas de la fuerza magnética entre conductores que llevan corrienteseléctricas. También sugirió que órbitas de corriente eléctrica de magnitudmolecular son las responsables de todos los fenómenos magnéticos. Esta ideaes la base de la teoría moderna del magnetismo.
En la década de 1820, se demostraron varias conexiones entre laelectricidad y el magnetismo por Faraday e independientemente por JosephHenry (1797-1878). Ellos comprobaron que se podía producir una corrienteeléctrica en un circuito al mover un imán cercano al circuito o bien variando lacorriente de un circuito cercano al primero. Estas observaciones demuestranque un cambio en el campo magnético produce un campo eléctrico. Añosdespués, el trabajo teórico realizado por Maxwell mostró que un campoeléctrico variable da lugar a un campo magnético.
1. Polos magnéticos
Ciertas regiones llamadas polos magnéticos producen fuerzas magnéticas,que pueden ser de atracción o repulsión, Todo imán tiene un polo norte y unpolo sur. Si un imán es de barra, los polos se localizan en sus extremos.
Si el polo norte de un imán se acerca al polo norte de otro imán, ambos serepelen; lo mismo ocurre en el caso de un polo sur próximo a otro polo sur. Encambio, si se acercan polos opuestos, se atraen.
Un polo norte magnético no puede existir sin la presencia de un polo surmagnético, y viceversa. Si se parte un imán por la mitad, cada uno de losfragmentos se comporta como un imán completo. Si se vuelven a partir lostrozos anteriores, se obtienen cuatro imanes completos; y así sucesivamente.
Con los polos de un imán ocurre lo mismo que sucede con las cargaseléctricas: si son del mismo signo, se repelen y si son de signo distinto, seatraen.

Al romper un imán, éste se convierte en nuevos imanes. en los imanes sesuele pintar de azul el polo norte y de rojo el polo sur.
Las tachuelas de hierro se convierten en imanes inducidos por contacto.
1.1 Funcionamiento de los imanes
Cuando acercamos un imán a un trozo de metal, observaremos que si estecontiene hierro se mueve e intenta pegarse al imán. Por otro lado, es posibleimantar un trozo de metal que contenga hierro. Esto lo observamos cuando, porejemplo, ponemos un imán natural cerca de un clip. Una vez que el clip se hayapegado al imán, podemos acercar este clip a otros materiales que contenganhierro, tales como otros clip, clavos, etc. El resultado de esto será que los otrosmateriales se pegarán al clip como si este fuese un “imán”. Es decir, la fuerzamagnética se “transmite” a través de materiales que contengan hierro.
1.2 Materiales magnéticos
Los materiales que pueden interactuar magnéticamente entre sí, o conotros materiales, son denominados materiales magnéticos, los cuales sonagrupados de acuerdo al comportamiento que presentan frente a los imanesnaturales. Esencialmente son de tres tipos:
• Materiales ferromagnéticos: Son los que muestran un comportamientosimilar al del hierro, es decir, son atraídos por los imanes naturales. Poseenuna gran imantación, pueden mantener las características que posee unimán luego del proceso de imantación (ejemplo del clip). Algunos materialesferromagnéticos son: hierro, gadolinio, níquel, calcio y compuestos deestos, de los cuales uno de los más conocidos es la magnetita (Fe3O4). Unode los mejores imanes permanentes conocidos en estos momentos es uncompuesto ferromagnético hecho de gadolinio, neodimio y boro.
• Materiales paramagnéticos: También son atraídos por los imanesnaturales, aun cuando el efecto es muy débil (imantación débil), salvo a muybajas temperaturas. Es posible imantarlos si los situamos junto a un imán;sin embargo, pierden rápidamente esta característica una vez que se haretirado el imán. Algunos materiales paramagnéticos son: manganeso,paladio y oxígeno en estado líquido.
• Materiales diamagnéticos: Interactúan magnéticamente con el imán, peroen vez de ser atraídos son repelidos en mayor o menor grado por este. Enotras palabras, en vez de absorber las líneas de fuerzas magnéticas (comolas ferromagnéticas), estos materiales las repelen. Algunos materialesdiamagnéticos son: diamante, bismuto, cobre, mercurio y agua.
Imanes artificiales
Alnico: Son fabricados por un proceso de fusión/ sinterización, compuestopor 8% de aluminio, 14% de niquel, 24% de cobalto, 51% de hierro y 3% dehierro
De ferrita: Fabricados con bario y estroncio. Están compuestos deaproximadamente 80% de óxido de hierro y 20% de óxido de estroncio. Sonresistentes a muchas sustancias químicas, disolventes y ácidos. Puedentrabajar a temperaturas desde -40˚C hasta 260˚C
De tierras raras: Son metálicos, con una fuerza de 6 a 10 veces superior alos materiales magnéticos tradicionales, y con temperatura de trabajo quevarían según el material. En neodimio la temperatura de trabajo alcanza 90˚Chasta 150˚C; en samario-cobalto, pueden llegar hasta 350˚C.
2. Campo magnético
Entre los polos de uno o más imanes se establece un campo magnético, elcual se representa por líneas de fuerza (líneas de campo magnético).
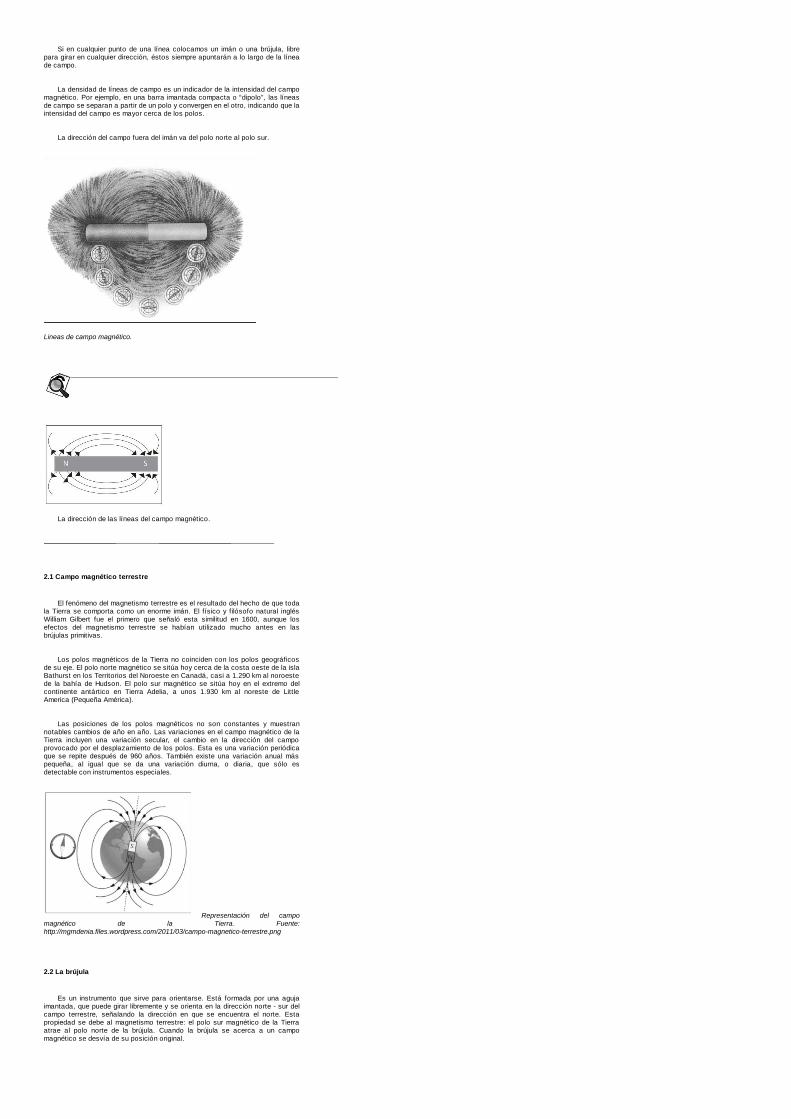
Si en cualquier punto de una línea colocamos un imán o una brújula, librepara girar en cualquier dirección, éstos siempre apuntarán a lo largo de la líneade campo.
La densidad de líneas de campo es un indicador de la intensidad del campomagnético. Por ejemplo, en una barra imantada compacta o “dipolo”, las líneasde campo se separan a partir de un polo y convergen en el otro, indicando que laintensidad del campo es mayor cerca de los polos.
La dirección del campo fuera del imán va del polo norte al polo sur.
Lineas de campo magnético.
La dirección de las líneas del campo magnético.
2.1 Campo magnético terrestre
El fenómeno del magnetismo terrestre es el resultado del hecho de que todala Tierra se comporta como un enorme imán. El físico y filósofo natural inglésWilliam Gilbert fue el primero que señaló esta similitud en 1600, aunque losefectos del magnetismo terrestre se habían utilizado mucho antes en lasbrújulas primitivas.
Los polos magnéticos de la Tierra no coinciden con los polos geográficosde su eje. El polo norte magnético se sitúa hoy cerca de la costa oeste de la islaBathurst en los Territorios del Noroeste en Canadá, casi a 1.290 km al noroestede la bahía de Hudson. El polo sur magnético se sitúa hoy en el extremo delcontinente antártico en Tierra Adelia, a unos 1.930 km al noreste de LittleAmerica (Pequeña América).
Las posiciones de los polos magnéticos no son constantes y muestrannotables cambios de año en año. Las variaciones en el campo magnético de laTierra incluyen una variación secular, el cambio en la dirección del campoprovocado por el desplazamiento de los polos. Esta es una variación periódicaque se repite después de 960 años. También existe una variación anual máspequeña, al igual que se da una variación diurna, o diaria, que sólo esdetectable con instrumentos especiales.
Representación del campomagnético de la Tierra. Fuente:http://mgmdenia.files.wordpress.com/2011/03/campo-magnetico-terrestre.png
2.2 La brújula
Es un instrumento que sirve para orientarse. Está formada por una agujaimantada, que puede girar libremente y se orienta en la dirección norte - sur delcampo terrestre, señalando la dirección en que se encuentra el norte. Estapropiedad se debe al magnetismo terrestre: el polo sur magnético de la Tierraatrae al polo norte de la brújula. Cuando la brújula se acerca a un campomagnético se desvía de su posición original.
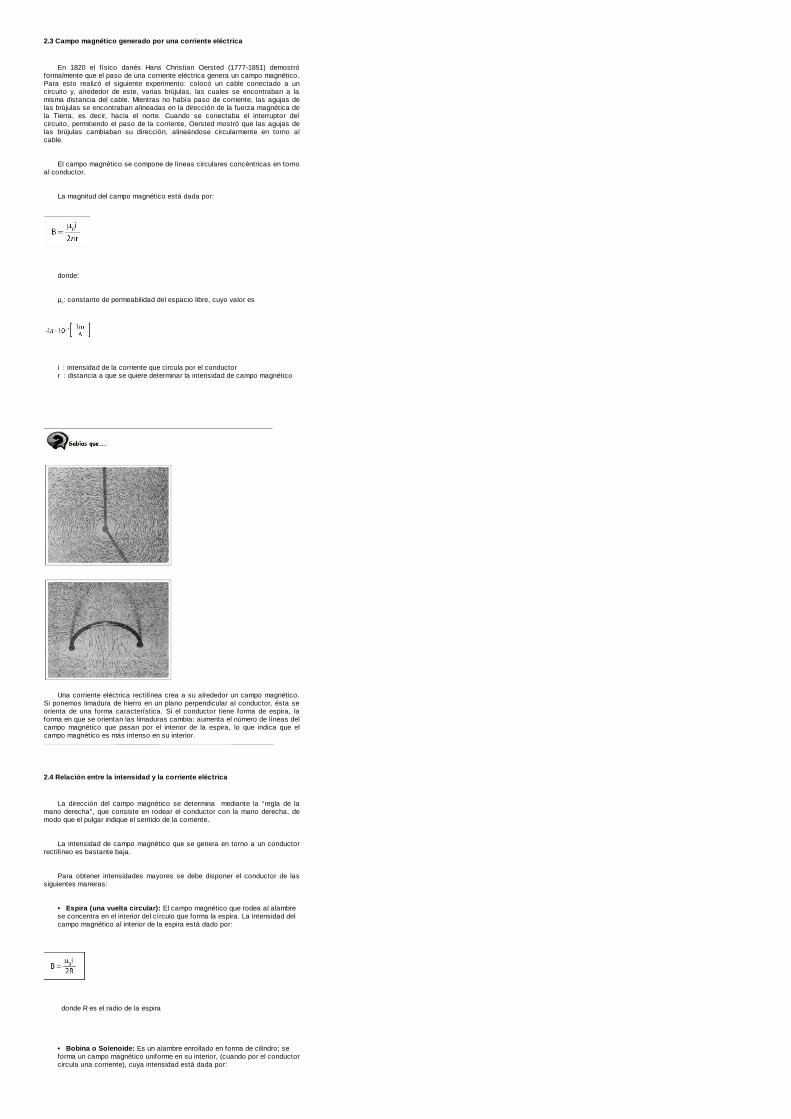
2.3 Campo magnético generado por una corriente eléctrica
En 1820 el físico danés Hans Christian Oersted (1777-1851) demostróformalmente que el paso de una corriente eléctrica genera un campo magnético.Para esto realizó el siguiente experimento: colocó un cable conectado a uncircuito y, alrededor de este, varias brújulas, las cuales se encontraban a lamisma distancia del cable. Mientras no había paso de corriente, las agujas delas brújulas se encontraban alineadas en la dirección de la fuerza magnética dela Tierra, es decir, hacia el norte. Cuando se conectaba el interruptor delcircuito, permitiendo el paso de la corriente, Oersted mostró que las agujas delas brújulas cambiaban su dirección, alineándose circularmente en torno alcable.
El campo magnético se compone de líneas circulares concéntricas en tornoal conductor.
La magnitud del campo magnético está dada por:
donde:
μ0: constante de permeabilidad del espacio libre, cuyo valor es
i : intensidad de la corriente que circula por el conductorr : distancia a que se quiere determinar la intensidad de campo magnético
Una corriente eléctrica rectilínea crea a su alrededor un campo magnético.Si ponemos limadura de hierro en un plano perpendicular al conductor, ésta seorienta de una forma característica. Si el conductor tiene forma de espira, laforma en que se orientan las limaduras cambia: aumenta el número de líneas delcampo magnético que pasan por el interior de la espira, lo que indica que elcampo magnético es más intenso en su interior.
2.4 Relación entre la intensidad y la corriente eléctrica
La dirección del campo magnético se determina mediante la “regla de lamano derecha”, que consiste en rodear el conductor con la mano derecha, demodo que el pulgar indique el sentido de la corriente.
La intensidad de campo magnético que se genera en torno a un conductorrectilíneo es bastante baja.
Para obtener intensidades mayores se debe disponer el conductor de lassiguientes maneras:
• Espira (una vuelta circular): El campo magnético que rodea al alambrese concentra en el interior del círculo que forma la espira. La intensidad delcampo magnético al interior de la espira está dado por:
donde R es el radio de la espira
• Bobina o Solenoide: Es un alambre enrollado en forma de cilindro; seforma un campo magnético uniforme en su interior, (cuando por el conductorcircula una corriente), cuya intensidad está dada por:
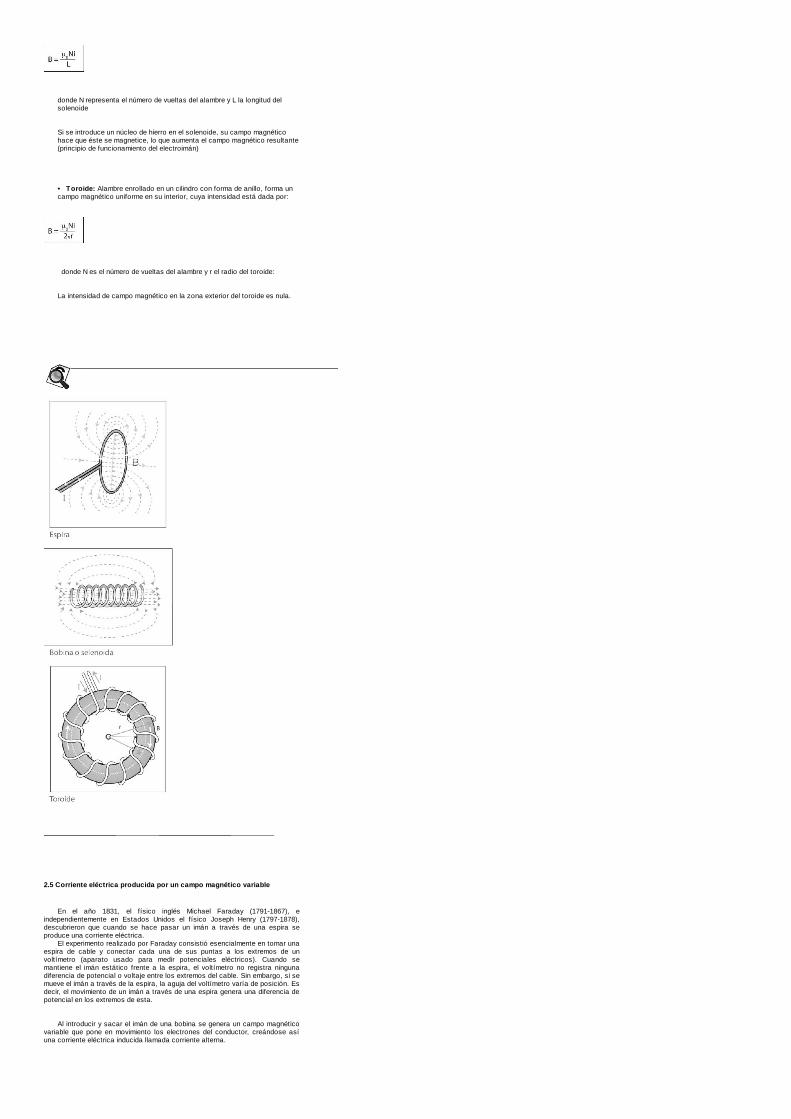
donde N representa el número de vueltas del alambre y L la longitud delsolenoide
Si se introduce un núcleo de hierro en el solenoide, su campo magnéticohace que éste se magnetice, lo que aumenta el campo magnético resultante(principio de funcionamiento del electroimán)
• Toroide: Alambre enrollado en un cilindro con forma de anillo, forma uncampo magnético uniforme en su interior, cuya intensidad está dada por:
donde N es el número de vueltas del alambre y r el radio del toroide:
La intensidad de campo magnético en la zona exterior del toroide es nula.
2.5 Corriente eléctrica producida por un campo magnético variable
En el año 1831, el físico inglés Michael Faraday (1791-1867), eindependientemente en Estados Unidos el físico Joseph Henry (1797-1878),descubrieron que cuando se hace pasar un imán a través de una espira seproduce una corriente eléctrica.
El experimento realizado por Faraday consistió esencialmente en tomar unaespira de cable y conectar cada una de sus puntas a los extremos de unvoltímetro (aparato usado para medir potenciales eléctricos). Cuando semantiene el imán estático frente a la espira, el voltímetro no registra ningunadiferencia de potencial o voltaje entre los extremos del cable. Sin embargo, si semueve el imán a través de la espira, la aguja del voltímetro varía de posición. Esdecir, el movimiento de un imán a través de una espira genera una diferencia depotencial en los extremos de esta.
Al introducir y sacar el imán de una bobina se genera un campo magnéticovariable que pone en movimiento los electrones del conductor, creándose asíuna corriente eléctrica inducida llamada corriente alterna.
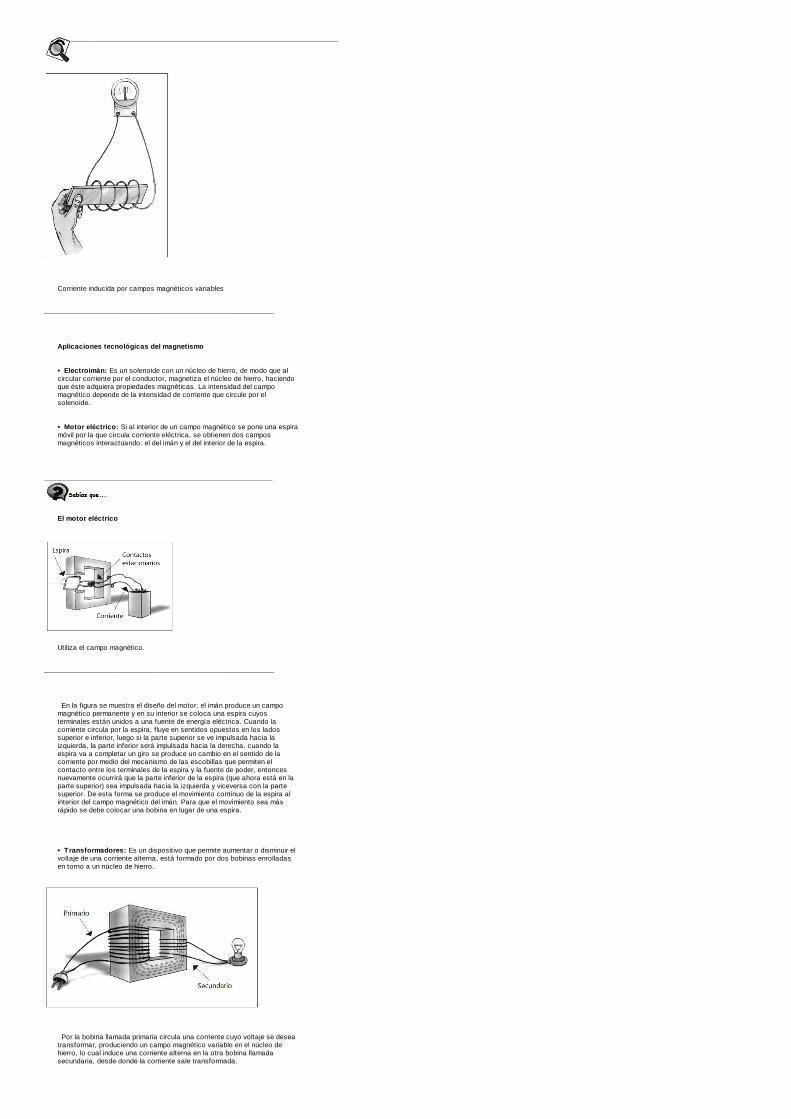
Corriente inducida por campos magnéticos variables
Aplicaciones tecnológicas del magnetismo
• Electroimán: Es un solenoide con un núcleo de hierro, de modo que alcircular corriente por el conductor, magnetiza el núcleo de hierro, haciendoque éste adquiera propiedades magnéticas. La intensidad del campomagnético depende de la intensidad de corriente que circule por elsolenoide.
• Motor eléctrico: Si al interior de un campo magnético se pone una espiramóvil por la que circula corriente eléctrica, se obtienen dos camposmagnéticos interactuando: el del imán y el del interior de la espira.
El motor eléctrico
Utiliza el campo magnético.
En la figura se muestra el diseño del motor: el imán produce un campomagnético permanente y en su interior se coloca una espira cuyosterminales están unidos a una fuente de energía eléctrica. Cuando lacorriente circula por la espira, fluye en sentidos opuestos en los ladossuperior e inferior, luego si la parte superior se ve impulsada hacia laizquierda, la parte inferior será impulsada hacia la derecha. cuando laespira va a completar un giro se produce un cambio en el sentido de lacorriente por medio del mecanismo de las escobillas que permiten elcontacto entre los terminales de la espira y la fuente de poder, entoncesnuevamente ocurrirá que la parte inferior de la espira (que ahora está en laparte superior) sea impulsada hacia la izquierda y viceversa con la partesuperior. De esta forma se produce el movimiento continuo de la espira alinterior del campo magnético del imán. Para que el movimiento sea másrápido se debe colocar una bobina en lugar de una espira.
• Transformadores: Es un dispositivo que permite aumentar o disminuir elvoltaje de una corriente alterna, está formado por dos bobinas enrolladasen torno a un núcleo de hierro.
Por la bobina llamada primaria circula una corriente cuyo voltaje se deseatransformar, produciendo un campo magnético variable en el núcleo dehierro, lo cual induce una corriente alterna en la otra bobina llamadasecundaria, desde donde la corriente sale transformada.
La relación matemática entre el voltaje y el número de espiras está dadapor:
• T imbre eléctrico: Al pulsar el interruptor del timbre, una corrienteeléctrica circula por un electroimán creando un campo magnético que atraea un pequeño martillo, el cual golpea una campanilla interrumpiendo elcircuito, lo que hace que el campo magnético desaparezca y el martillovuelve a su posición. El proceso se repite obteniéndose el sonidocaracterístico del timbre.
1. Inseparabilidad de los polos magnéticos: Al romper un imán, éste seconvierte en un nuevo imán, con sus respectivos polos.
2. Solenoide: Alambre enrollado en forma de cilindro, en cuyo interior seorigina un campo magnético uniforme cuando circula una corriente.
CAPÍTULO 7: EL CALOR
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Manejar con familiaridad y distinguir los conceptos de temperatura ycalor, su relación con la energía, las propiedades de los materiales yartefactos de uso cotidiano en relación a estas magnitudes.• Reconocer que en nociones de uso cotidiano (como calor, temperatura,energía) hay toda una ciencia y un mundo de ideas y aplicaciones.• Reconocer que la tecnología al interior de objetos de uso cotidiano hasido posible gracias al conocimiento científico (como el refrigerador).• Comprenderque, al menos en algunos casos, el comportamiento globalde un sistema se puede explicar en términos de la participación individualdesus partes (como la relación entre la temperatura de un cuerpo y elmovimiento de sus constituyentes moleculares).• Apreciar la generalidad de algunas nociones de la Física (como laenergía).• Reconocer que lo que leen nuestros sentidos puede afectarse por lascondiciones del entorno y no es infalible (como la apreciación de latemperatura).
Las diferentes teorías formuladas a través del tiempo para explicar el calor y losfenómenos que origina en los cuerpos, han permitido llegar a la siguienteconclusión: “El calor es una de las diversas formas en que se manifiesta laenergía del Universo”.
Entre 1600 y 1700, Europa vivió una “pequeña era glacial” cuando latemperatura fue más baja que en otros períodos de los últimos mil años.Mantenerse caliente era de vital importancia, por tanto, mucha gente se dedicóal estudio del calor. Un resultado fue la invención de máquinas, que empleabanla energía generada por la combustión de gasolina para producir trabajo útil.Estas máquinas, aunque no tan útiles como la de combustión interna, liberarona la sociedad de su dependencia de la energía de la gente y de los animales.Cuando los inventores estudiaron la manera de hacer que estas máquinasfueran más poderosas y eficientes, desarrollaron la ciencia de la termodinámica,el estudio del calor.
No se puede decir que “un cuerpo tiene calor” o que “la temperatura es unamedida del calor en un cuerpo”. El término “calor” sólo debe emplearse paradesignar la energía en transición, es decir, la que se transfiere de un cuerpo aotro cuando existe una diferencia de temperatura.
La transferencia de calor hacia un cuerpo origina un aumento en la energíade agitación de sus moléculas y átomos, es decir, ocasiona un aumento de la“energía interna” del cuerpo, lo cual, generalmente, produce una elevación de sutemperatura.
1. El calor y la temperaturaLas diferentes teorías formuladas a través del tiempo para explicar el calor
y los fenómenos que origina en los cuerpos han permitido llegar a la conclusiónde que éste es una de las diversas formas en que se manifiesta la energía en eluniverso. La energía calórica total de un cuerpo corresponde a la suma de laenergía cinética y potencial de sus átomos. De acuerdo con esto llamaremoscalor a la energía calórica que un cuerpo cede o absorbe en un tiempodeterminado.
• Temperatura y Modelo Microscópico de la Materia: Para diferenciarlos diversos estados térmicos, según nuestro sentido del tacto, empleamoslos términos frío, tibio y caliente, de acuerdo a nuestra temperatura corporalpromedio. Sin embargo, esas percepciones resultan bastante relativas a lahora de preguntarnos qué pasaría si nuestra temperatura corporal fueramucho mayor o menor. Para evitar este problema de subjetividad y apreciarcon mayor exactitud estas diferencias entre los cuerpos, se recurre a latemperatura. La temperatura es aquella magnitud física que permiteasegurar si dos o más sistemas se encuentran o no en equilibrio térmico, locual da cuenta de una medida de la mayor o menor agitación de lasmoléculas o átomos que constituyen un cuerpo. Cuanto mayor sea latemperatura de una sustancia, tanto mayor será la energía cinética de susmoléculas. Recíprocamente, cuando la temperatura de la sustanciadisminuye, la agitación de sus moléculas se reduce.
No se debe confundir la temperatura de un cuerpo con la cantidad de calorque la determina, ni menos con su energía calórica total asociada. Si el aguacontenida en un recipiente representa la cantidad de calor que un cuerpo cede oabsorbe en un instante dado el nivel que ésta alcanza en el recipienterepresentaría a la temperatura.
Así por ejemplo, la llama de un fósforo nos quema, pues presenta una altatemperatura, sin embargo, es insuficiente para fundir un pequeño trozo dehielo; en cambio, un litro de agua tibia no nos quema debido a su escasa
temperatura, pero tiene la cantidad de calor suficiente como para fundirrápidamente el mismo trozo de hielo.
Del mismo modo que a través de la sensación de esfuerzo muscularpodemos apreciar el valor de una fuerza, también por el tacto se alcanza unaidea relativa sobre la temperatura de los cuerpos. Como en toda medición, éstase establece por comparación: notamos caliente un cuerpo cuya temperatura essuperior a la de nuestro cuerpo, y frío en caso contrario..
1.1 Medición de la temperatura
• Equilibrio térmico: Mediante el sentido del tacto podemos percibir si uncuerpo es el más caliente o el más frío. Supongamos que tuviésemos doscuerpos con distinta temperatura, uno en contacto con el otro y lejos deinfluencias externas. Podría comprobarse que el cuerpo más caliente se iráenfriando, mientras que el más frío se irá calentando. Después de ciertotiempo se notaría, empleando el tacto, que los cuerpos alcanzan unamisma temperatura. A partir de este momento, la temperatura de loscuerpos no sufriría alteraciones, es decir, llegarán a una situación finaldenominada “estado de equilibrio térmico”.
Siempre que dos o más sustancias a diferente temperatura se ponen encontacto, aisladas de influencias externas, se produce una “transferenciade energía calórica” desde la de mayor temperatura que cede energía,hacia la de menor temperatura; quien la absorbe, aumentando con ello sutemperatura.
• Termómetros: Como dijimos, la comparación de temperatura de loscuerpos por medio del tacto sólo proporciona una idea cualitativa de suequilibrio térmico. Para que la temperatura pueda considerarse unamagnitud física es necesario medirla y para ello se necesita cuantificarla.
Esta medición de la temperatura se hace con los llamados termómetros.En cada uno de sus diferentes tipos, se utiliza la variación de una ciertacaracterística (longitud, volumen, color, etc.) en una determinada sustancia(líquido, sólido, etc.) como consecuencia de un cambio de la temperatura.Así, por ejemplo, hay termómetros basados en los cambios que la variaciónde temperatura produce en la longitud de una varilla metálica, o bien, en elvolumen de un gas o en el color de un sólido muy caliente.
Distintos tipos de termómetros
Termómetro de gas. En este instrumento el valor de la temperatura seobtiene por la lectura de la presión de un gas que se mantiene en volumenconstante.
Muchos de los termómetros ambientales son de alcohol teñido, sustanciaque permite la medición por dilatación o contracción y que posee similarescaracterísticas que el termómetro de laboratorio.
Termómetro de máxima y mínima. Este aparato indica, por medio de dosíndices, las temperaturas máxima y mínima que se producen en cierto intervalode tiempo.
• Pirómetro óptico: La temperatura del objeto (un horno, por ejemplo) seobtiene comparando el color de la llama con el del filamento de una lámparaeléctrica.
• Termómetro metálico: El calentamiento hace que un espiral bimetálicocalibrado previamente se curve, moviendo la aguja que señala el valor de latemperatura.
• Termómetros de resistencia eléctrica: Algunos termómetros de estetipo usan semiconductores (por ejemplo, germanio). Son los másrecomendados para medir temperaturas muy bajas (entre 0,2 K y 50 K).
• Termómetros de termopar: De uso frecuente en las industrias pararegistros continuos y control de temperatura. Se basan en la medida delvoltaje existente en las uniones de cables metálicos o conexiones denaturaleza diferentes, la que depende de las temperaturas de las uniones.
• Termómetros magnéticos: Se sustentan en la medición de laspropiedades magnéticas de determinados materiales que varían con latemperatura. Se los utiliza para medir temperaturas menores de 1 Kelvin(1K).
• Termómetros acústicos: El principio en que se sustenta elfuncionamiento de estos aparatos es una variación de la velocidad delsonido (o de ultrasonido), de acuerdo con la temperatura. Se utilizan paratemperaturas bajas (2 K a 40 K).
Para adquirir el concepto cuantitativo de la temperatura no necesitamosanalizar esta gran cantidad de dispositivos. Vamos a desarrollar nuestroestudio con base únicamente en el tipo más común de termómetro: el querelaciona la temperatura con la altura de una columna de líquido en elinterior de un tubo capilar de vidrio.
• Termómetro de líquido: En este termómetro las variaciones de latemperatura producen dilataciones o contracciones del líquidotermométrico, haciendo subir o bajar dicha columna. Así, a cada altura dela columna podemos asignarle un número, el cual corresponde a latemperatura que determinó dicha altura.
El líquido que más se emplea en este tipo de termómetros es el mercurio.Algunos termómetros más baratos utilizan un alcohol coloreado, con rangode temperaturas entre –110°C y 78°C correspondiente a sus respectivospuntos de solidificación y ebullición.
Entre los líquidos, el mercurio es estimado universalmente como el líquidotermométrico por excelencia, debido a las siguientes características:
- Sus puntos límites bastante separados (-39°C y 357°C a presión normal)determinan un amplio margen de temperaturas medibles suficientes para losusos más corrientes.
- Su dilatación es bastante regular, lo que favorece la precisión delinstrumento.
- Posee una baja capacidad calórica, por lo que basta una pequeñacantidad de calor para que su temperatura se eleve en forma rápida yapreciable, dando gran sensibilidad al instrumento.- Es fácil de obtener químicamente puro.
- No moja el vidrio, por lo cual no influye la capilaridad del tubo. El termómetro médico o clínico de mercurio sólo puede medir temperaturasmáximas. Esto se debe a que presenta en la salida del bulbo una pequeñaestrangulación que hace que el mercurio pueda subir por el capilar pero noregresar, por lo que se requiere agitarlo para que el líquido baje.
Al poner el termómetro clínico en contacto con nuestro cuerpo, el mercuriose dilata debido a la transferencia de energía. Esta dilatación se traduce enla ascensión de la columna de mercurio por el capilar. La dilatación delmercurio se detendrá cuando alcance el equilibrio térmico con nuestrocuerpo marcando así nuestra temperatura.
Termómetro clínico: debido al estrechamiento en la base del tubo capilar, lacolumna de mercurio no puede regresar al depósito.
Por ello, este termómetro sigue indicando la temperatura de un persona,aunque ya no esté en contacto con ella..

A diferencia del termómetro clínico, que sólo puede medir temperaturasmáximas, los termómetros de laboratorio tienen la posibilidad de subir o bajarcontinuamente.
1.2 Escalas termométricas
Para graduar un termómetro se consideran como puntos de referencia dostemperaturas arbitrarias y fáciles de alcanzar con precisión, llamados puntosfijos. Según los puntos fijos adoptados, los termómetros resultan graduados endiferentes escalas termométricas o de temperatura.
Por tratarse de asignaciones arbitrarias, en la construcción de determinadaescala termométrica se adoptan ciertas convenciones. A través de los añosfueron surgiendo y aplicándose varias escalas distintas en diferentes países.Naturalmente, esta diversidad de escalas traía consigo una serie deinconvenientes en el trabajo científico. Para solucionar estas dificultades, losfísicos sugirieron la adopción de una escala única, basada en convencionesinternacionales.
• Escala Celsius: En esta escala Celsius asigna como punto fijo inferior ala temperatura normal de fusión del hielo dándole el valor 0. Su punto fijosuperior corresponde a la temperatura normal de ebullición del agua, a laque le asignó el valor 100. Al dividir este intervalo de temperaturas en 100partes iguales, cada división correspondía a una variación de temperaturade un grado centígrado o Celsius (1°C). La graduación puede continuar másallá de sus puntos fijos.
Anders Celsius (1701-1744). Científico Sueco que realizó diversos trabajos en elcampo de la astronomía y las geociencias. Pero su nombre se hizo másconocido por la invención de la escala centígrada de temperatura, que comenzóa utilizarse en casi todos los países del mundo.Fuente: http://upload.wikimedia.org/wikipedia/commons/thumb/b/b1/Anders-Celsius-Head.jpg/192px-Anders-Celsius-Head.jpg
• Escala Kelvin: Otra escala empleada universalmente, sobre todo en losmedios científicos, fue propuesta por el físico inglés Lord Kelvin, a la cualse le ha dado el nombre de escala Kelvin o absoluta, y corresponde a launidad fundamental de medición en el sistema internacional.
Todas las temperaturas en la escala Kelvin son positivas.
El cero absoluto corresponderá a una situación de energía cinética mínimade los átomos y las moléculas de la sustancia.
La idea de proponer esta escala surgió de las discusiones relacionadascon las temperaturas máxima y mínima que puede alcanzar un elemento. Secomprobó que, teóricamente, no hay límite superior para la temperatura quepueda alcanzar un objeto, sin embargo se observa que existe un límite naturalcuando se intenta bajar su temperatura. Los estudios realizados en los grandeslaboratorios de diversos países ponen de manifiesto que es imposible obteneruna temperatura inferior a –273°C, debido a que a esta temperatura lasmoléculas que conforman la sustancia ya no tienen energía para ceder. Estatemperatura se denomina “cero absoluto”. En realidad, el cero absoluto es unatemperatura límite que no se puede alcanzar y, por ello, sólo se han obtenidovalores muy próximos a ella. Kelvin propuso como origen de su escala latemperatura del cero absoluto, y un intervalo unitario igual al intervalo deCelsius, es decir ΔT° en 1°C = ΔT° en 1 K.
De modo general:
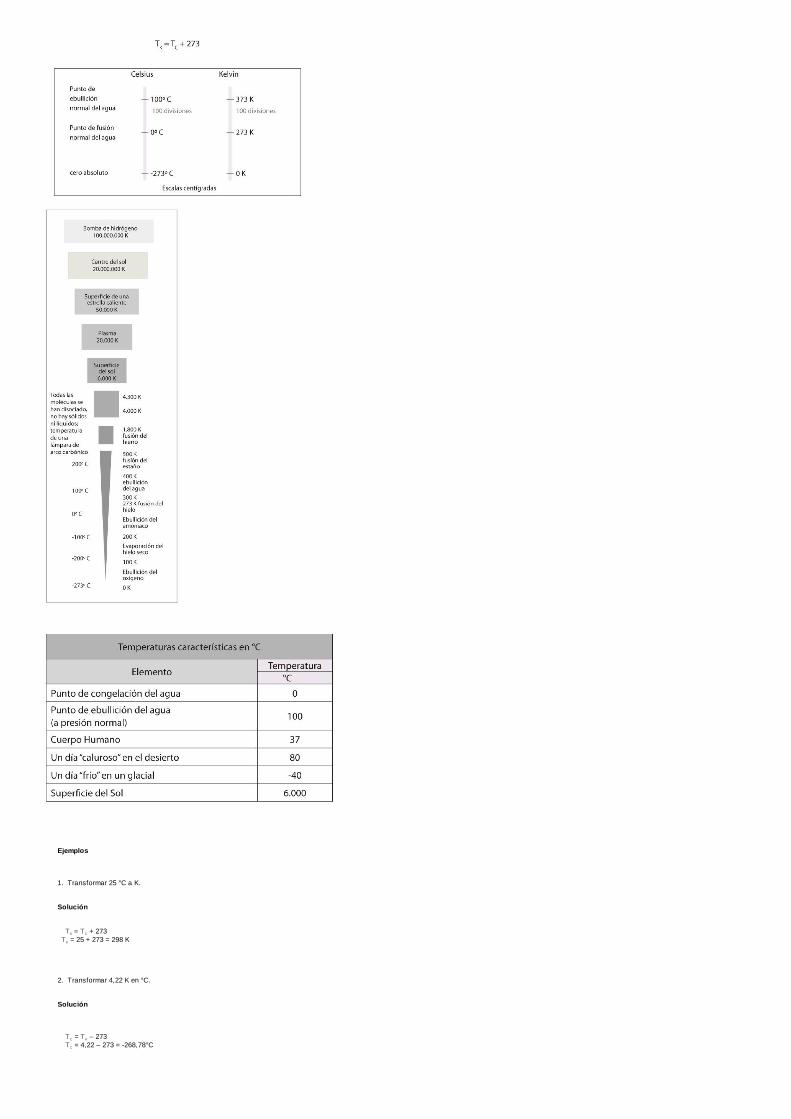
Ejemplos
1. Transformar 25 °C a K.
Solución
TK = TC + 273 TK = 25 + 273 = 298 K
2. Transformar 4,22 K en °C.
Solución
TC = TK – 273 TC = 4,22 – 273 = -268,78°C
3. La temperatura de un día cualquiera en Chillan fue 34 [°C] la máxima y 8[°C] la mínima. El rango de temperatura en Celsius y Kelvin para ese día fue:
Solución
Transformando individualmente las temperaturas se tiene:
1.3 Dilatación térmica
Un hecho muy conocido es que las dimensiones de los cuerpos aumentancuando se eleva su temperatura. Salvo algunas excepciones, todos loselementos, independientemente de que sean sólidos, líquidos o gases, sedilatan con la temperatura.
Al aumentar la temperatura de una sustancia, aumenta también elmovimiento de las moléculas que la componen, separándose más entre sí yprovocando con ello un incremento de volumen o dilatación. En caso contrario,al disminuir la temperatura las moléculas se juntan, reduciéndose el volumen delcuerpo o sustancia (contracción).
La figura adjunta muestra un experimento sencillo que ilustra la dilatación deun sólido: a la temperatura ambiente, la esfera metálica A puede pasar conpequeña holgura por el anillo B. Al calentar únicamente la esfera, se observaque ya no pasa por el anillo.
Entendemos el calor como la energía que se transmite de un cuerpo a otro,en virtud únicamente de una diferencia de temperatura entre ellos.
Por tratarse de una forma de energía, las unidades del calor son:
S.I. 1 Joule = 1 [J]
C.G.S. 1 Ergio = 1 [erg]
La unidad “caloría“ corresponde a una unidad de energía y su nombre es unresiduo histórico proveniente de la antigua percepción de que el calor era unfluido invisible llamado “calórico”.
Debido a la elevación de su temperatura, la esfera se dilató. Si se esperaque su temperatura vuelva a su valor original, la esfera se contraerá y volverá apasar por el anillo.
Los rieles de la línea del tren se instalan por tramos, con una pequeñaseparación entre ellos. Así se deja espacio para la dilatación del metal en díasmuy calurosos, evitando que se tuerzan o levanten (lo mismo sucede con elpavimento en calles y carreteras).
Los instrumentos musicales como la guitarra se desafina fácilmente con loscambios de volumen, como consecuencia de los cambios de temperatura.
Para que un puente pueda dilatarse libremente sin que se produzcan dañosestructurales, su estructura se apoya sobre rodillos. Si no se tomaran estasprecauciones las estructuras se dañarían, pues los esfuerzos internos quesoportan los cuerpos sometidos a una variación brusca de temperatura sondeterminantes en su comportamiento mecánico si no se lo deja dilatarse ocontraerse libremente.
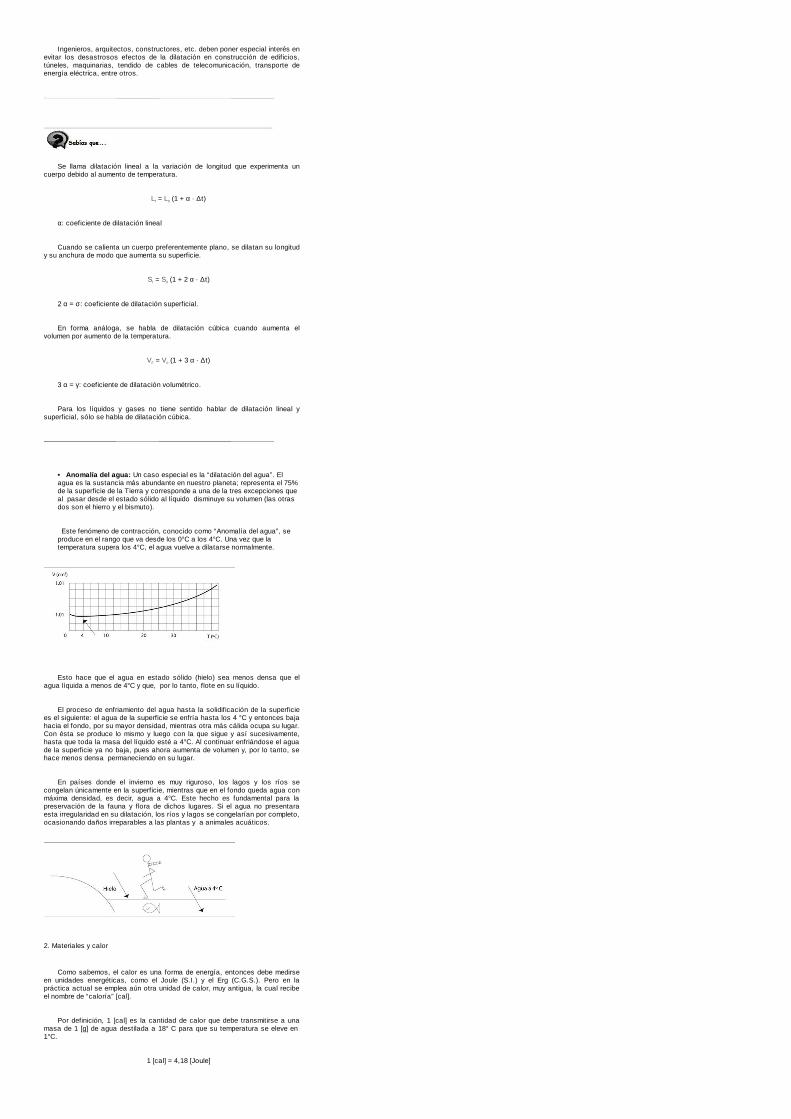
Ingenieros, arquitectos, constructores, etc. deben poner especial interés enevitar los desastrosos efectos de la dilatación en construcción de edificios,túneles, maquinarias, tendido de cables de telecomunicación, transporte deenergía eléctrica, entre otros.
Se llama dilatación lineal a la variación de longitud que experimenta uncuerpo debido al aumento de temperatura.
Lf = L0 (1 + α · Δt)
α: coeficiente de dilatación lineal
Cuando se calienta un cuerpo preferentemente plano, se dilatan su longitudy su anchura de modo que aumenta su superficie.
Sf = S0 (1 + 2 α · Δt)
2 α = σ: coeficiente de dilatación superficial.
En forma análoga, se habla de dilatación cúbica cuando aumenta elvolumen por aumento de la temperatura.
VF = V0 (1 + 3 α · Δt)
3 α = γ: coeficiente de dilatación volumétrico.
Para los líquidos y gases no tiene sentido hablar de dilatación lineal ysuperficial, sólo se habla de dilatación cúbica.
• Anomalía del agua: Un caso especial es la “dilatación del agua”. Elagua es la sustancia más abundante en nuestro planeta; representa el 75%de la superficie de la Tierra y corresponde a una de la tres excepciones queal pasar desde el estado sólido al líquido disminuye su volumen (las otrasdos son el hierro y el bismuto).
Este fenómeno de contracción, conocido como “Anomalía del agua”, seproduce en el rango que va desde los 0°C a los 4°C. Una vez que latemperatura supera los 4°C, el agua vuelve a dilatarse normalmente.
Esto hace que el agua en estado sólido (hielo) sea menos densa que elagua líquida a menos de 4°C y que, por lo tanto, flote en su líquido.
El proceso de enfriamiento del agua hasta la solidificación de la superficiees el siguiente: el agua de la superficie se enfría hasta los 4 °C y entonces bajahacia el fondo, por su mayor densidad, mientras otra más cálida ocupa su lugar.Con ésta se produce lo mismo y luego con la que sigue y así sucesivamente,hasta que toda la masa del líquido esté a 4°C. Al continuar enfriándose el aguade la superficie ya no baja, pues ahora aumenta de volumen y, por lo tanto, sehace menos densa permaneciendo en su lugar.
En países donde el invierno es muy riguroso, los lagos y los ríos secongelan únicamente en la superficie, mientras que en el fondo queda agua conmáxima densidad, es decir, agua a 4°C. Este hecho es fundamental para lapreservación de la fauna y flora de dichos lugares. Si el agua no presentaraesta irregularidad en su dilatación, los ríos y lagos se congelarían por completo,ocasionando daños irreparables a las plantas y a animales acuáticos.
2. Materiales y calor
Como sabemos, el calor es una forma de energía, entonces debe medirseen unidades energéticas, como el Joule (S.I.) y el Erg (C.G.S.). Pero en lapráctica actual se emplea aún otra unidad de calor, muy antigua, la cual recibeel nombre de “caloría” [cal].
Por definición, 1 [cal] es la cantidad de calor que debe transmitirse a unamasa de 1 [g] de agua destilada a 18° C para que su temperatura se eleve en 1°C.
1 [cal] = 4,18 [Joule]
Equivalentemente:0,24 [cal] = 1 [Joule]
2.1 Capacidad calórica y calor específico
Así como dos recipientes no presentan la misma capacidad para contenercierto volumen, tampoco todos los materiales tienen la misma capacidad paraabsorber calor, lo que significa que hay algunos que son más difíciles decalentar que otros. La capacidad para absorber calor se conoce con el nombrede “capacidad calórica” (C) y se expresa como la relación entre el calorabsorbido o cedido (Q) por un sistema y la variación de temperatura que ésteexperimenta (ΔT).
Ahora bien, al aplicar la misma cantidad de calor (Q) a dos cuerpos osustancias iguales pero de distinta masa, la mayor variación de temperatura(ΔT) la experimentará la masa menor. Para incorporar esta variable se define elconcepto de “calor específico”(c). El calor específico corresponde a sucapacidad calórica por unidad de masa y es característico para cadasustancia.
A pesar de que la energía solar incide de la misma forma sobre el agua y laarena, la temperatura del agua es inferior a la de la arena..
Unidades de Medición
El alto calor específico del agua la convierte en un muy buen refrigerante,por ello se utiliza en los radiadores de los automóviles
El calor específico de una sustancia es el incremento de su energía térmicacuando un kilogramo de la sustancia aumenta su temperatura en un gradoKelvin.
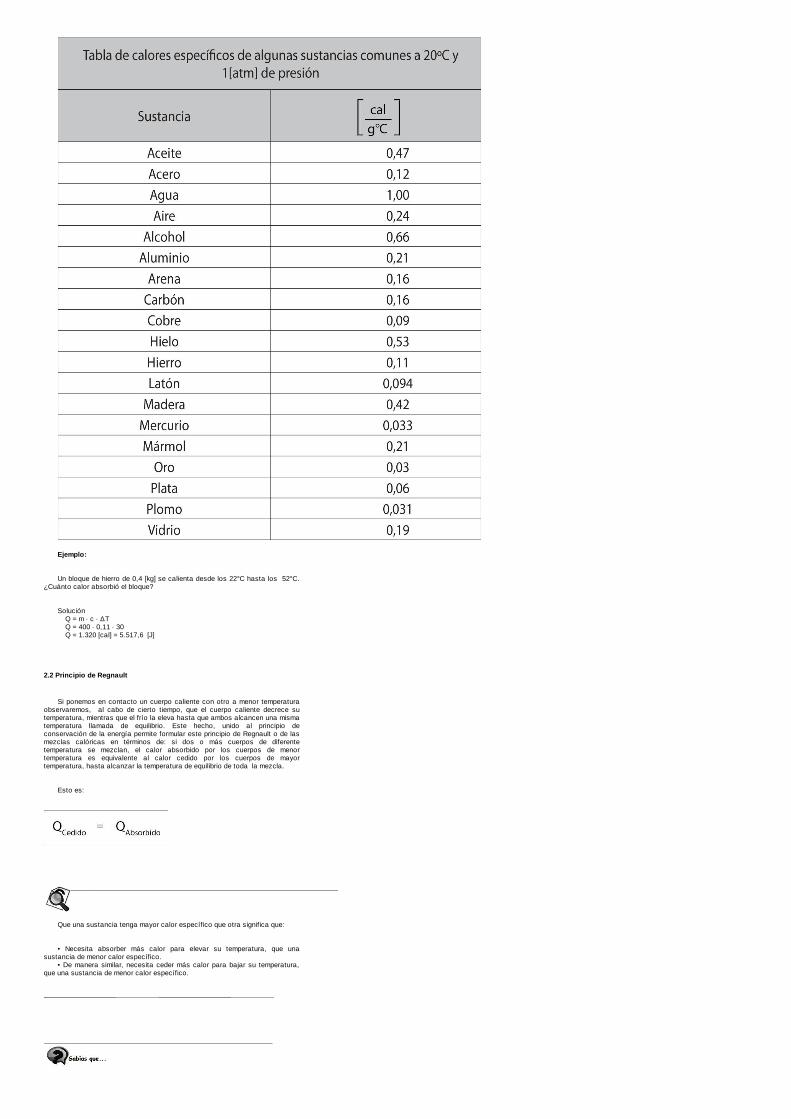
Ejemplo:
Un bloque de hierro de 0,4 [kg] se calienta desde los 22°C hasta los 52°C.¿Cuánto calor absorbió el bloque?
Solución Q = m · c · ΔT Q = 400 · 0,11 · 30 Q = 1.320 [cal] = 5.517,6 [J]
2.2 Principio de Regnault
Si ponemos en contacto un cuerpo caliente con otro a menor temperaturaobservaremos, al cabo de cierto tiempo, que el cuerpo caliente decrece sutemperatura, mientras que el frío la eleva hasta que ambos alcancen una mismatemperatura llamada de equilibrio. Este hecho, unido al principio deconservación de la energía permite formular este principio de Regnault o de lasmezclas calóricas en términos de: si dos o más cuerpos de diferentetemperatura se mezclan, el calor absorbido por los cuerpos de menortemperatura es equivalente al calor cedido por los cuerpos de mayortemperatura, hasta alcanzar la temperatura de equilibrio de toda la mezcla.
Esto es:
Que una sustancia tenga mayor calor específico que otra significa que:
• Necesita absorber más calor para elevar su temperatura, que unasustancia de menor calor específico.
• De manera similar, necesita ceder más calor para bajar su temperatura,que una sustancia de menor calor específico.
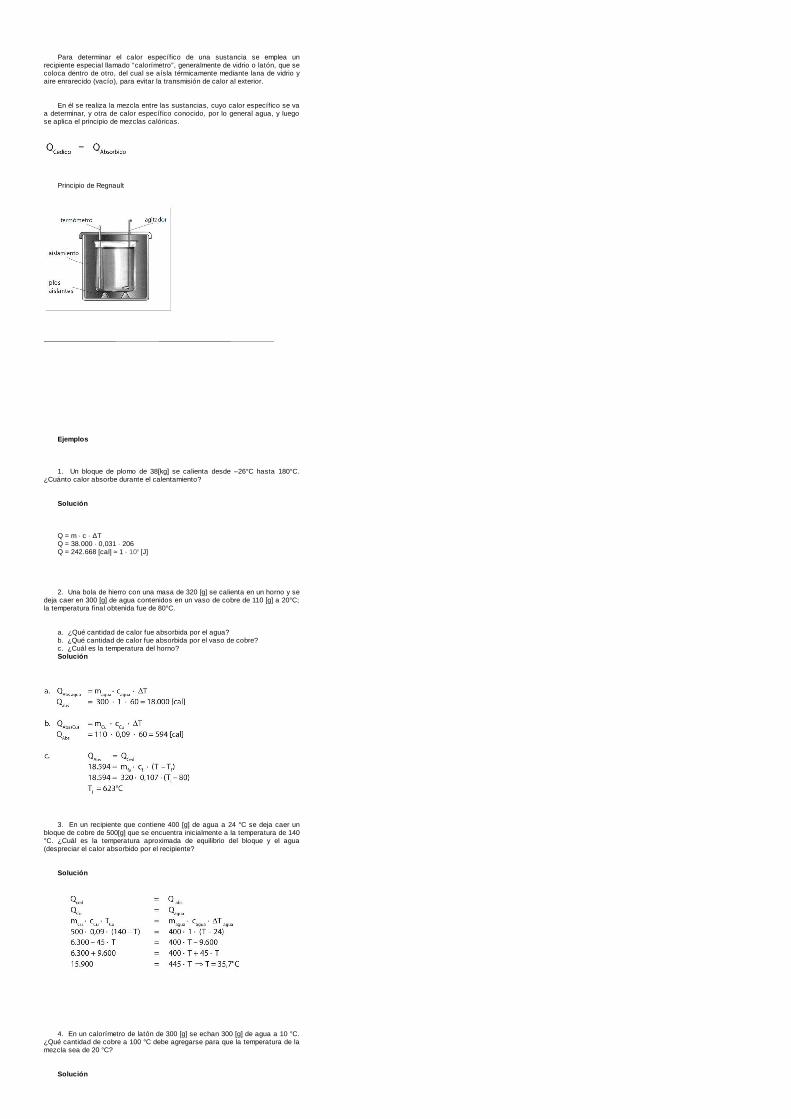
Para determinar el calor específico de una sustancia se emplea unrecipiente especial llamado “calorímetro”, generalmente de vidrio o latón, que secoloca dentro de otro, del cual se aísla térmicamente mediante lana de vidrio yaire enrarecido (vacío), para evitar la transmisión de calor al exterior.
En él se realiza la mezcla entre las sustancias, cuyo calor específico se vaa determinar, y otra de calor específico conocido, por lo general agua, y luegose aplica el principio de mezclas calóricas.
Principio de Regnault
Ejemplos
1. Un bloque de plomo de 38[kg] se calienta desde –26°C hasta 180°C.¿Cuánto calor absorbe durante el calentamiento?
Solución
Q = m · c · ΔTQ = 38.000 · 0,031 · 206Q = 242.668 [cal] ≈ 1 · 106 [J]
2. Una bola de hierro con una masa de 320 [g] se calienta en un horno y sedeja caer en 300 [g] de agua contenidos en un vaso de cobre de 110 [g] a 20°C;la temperatura final obtenida fue de 80°C.
a. ¿Qué cantidad de calor fue absorbida por el agua?b. ¿Qué cantidad de calor fue absorbida por el vaso de cobre?c. ¿Cuál es la temperatura del horno?Solución
3. En un recipiente que contiene 400 [g] de agua a 24 °C se deja caer unbloque de cobre de 500[g] que se encuentra inicialmente a la temperatura de 140°C. ¿Cuál es la temperatura aproximada de equilibrio del bloque y el agua(despreciar el calor absorbido por el recipiente?
Solución
4. En un calorímetro de latón de 300 [g] se echan 300 [g] de agua a 10 °C.¿Qué cantidad de cobre a 100 °C debe agregarse para que la temperatura de lamezcla sea de 20 °C?
Solución
2.3 Transmisión del calor
a. Conducción
Si colocamos una cuchara en una taza con café caliente o en un plato desopa y al cabo de unos instantes tocamos la parte no sumergida, encontramosque ella se ha calentado considerablemente. Lo mismo sucede si acercamosuna barra metálica a la llama de un mechero: luego de unos instantes toda labarra se encontrará a una mayor temperatura.
Esto se debe a que los átomos o moléculas del extremo calentado,adquieren una mayor energía de agitación. Parte de esta energía se transfiere alas partículas de la región más próxima a dicho extremo y, por tanto, latemperatura de esta región también aumenta.
Este proceso continúa a lo largo de la barra. Después de cierto tiempo, lapersona que sostiene el otro extremo percibirá una elevación de temperatura.
En otras palabras, se produce una transmisión de calor a lo largo de labarra, la que continuará mientras exista una diferencia de temperatura entreambos extremos. Esta transmisión es debida a la agitación de los átomos de labarra y transferida sucesivamente de uno a otro átomo, sin que estas partículassufran ninguna traslación en el interior del cuerpo. Este proceso de transmisiónde calor se denomina “conducción térmica”. Esta forma de propagación delcalor ocurre en las sustancias sólidas.
El calor se transmite por conducción a lo largo de un sólido, debido a laagitación de los átomos y las moléculas del sólido.
El techo de los automóviles, las rocas y pavimento, la arena en la playa yotros objetos expuestos a la radiación directa del Sol alcanzan temperaturasmuy superiores a la del aire y las máximas que dan los meteorólogos, debido aque sus calores específicos son menores que el del aire.
En el proceso de transferencia de energía entre dos cuerpos, los de mayortemperatura (café, bebida, etc.) transfieren energía a los de menor temperatura(cuchara, hielo, etc.) hasta que sus temperaturas se equilibran.
Dependiendo de la constitución atómica de una sustancia, la agitacióntérmica podrá transmitirse de uno a otro átomo con mayor o menor facilidad,haciendo que tal sustancia sea buena o mala conductora. Los metales sonbuenos conductores térmicos, su conductividad se aprovecha en la fabricaciónde numerosos utensilios domésticos, especialmente ollas.
En general los fluidos son buenos aislantes térmicos. El aire, por ejemplo,es un buen aislante debido a su baja conductividad térmica. El calor es energíaque se transfiere en un determinado tiempo, por lo cual es una magnitud física,a diferencia del frío que sencillamente corresponde a la ausencia de calor.Estrictamente hablando los conductores o aislantes no transfieren el frío. Sóloel calor se transfiere.
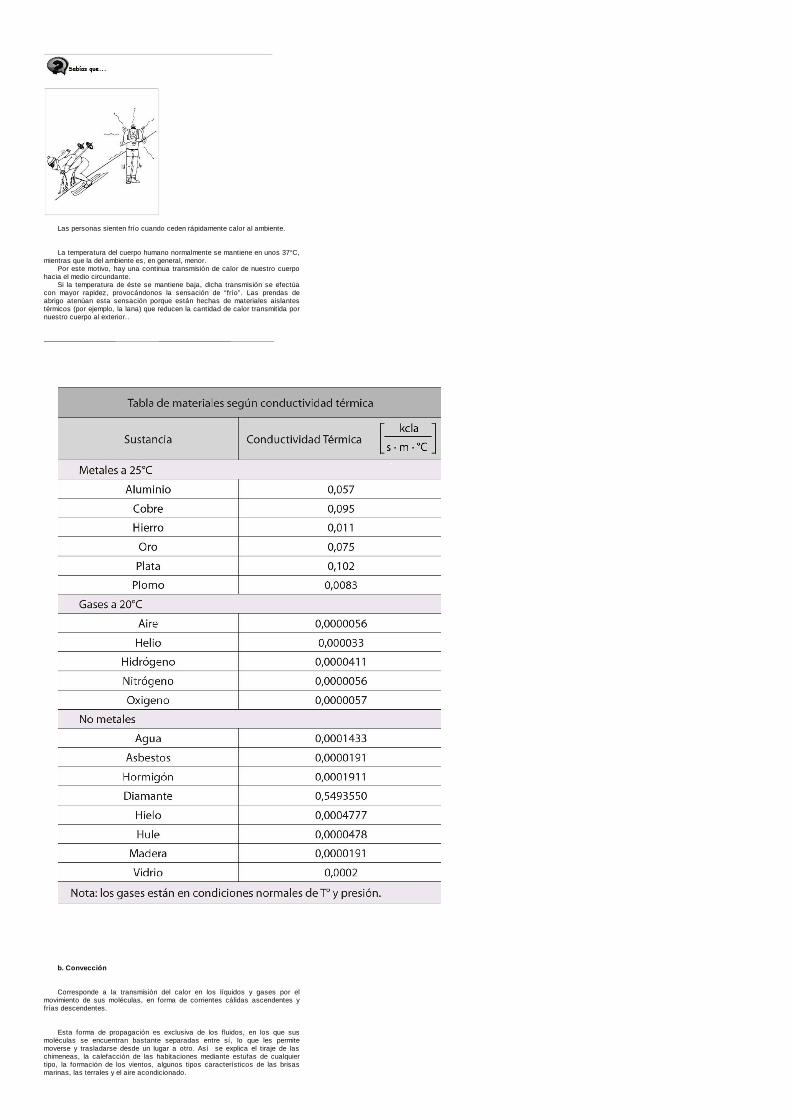
Las personas sienten frío cuando ceden rápidamente calor al ambiente.
La temperatura del cuerpo humano normalmente se mantiene en unos 37°C,mientras que la del ambiente es, en general, menor.
Por este motivo, hay una continua transmisión de calor de nuestro cuerpohacia el medio circundante.
Si la temperatura de éste se mantiene baja, dicha transmisión se efectúacon mayor rapidez, provocándonos la sensación de “frío”. Las prendas deabrigo atenúan esta sensación porque están hechas de materiales aislantestérmicos (por ejemplo, la lana) que reducen la cantidad de calor transmitida pornuestro cuerpo al exterior..
b. Convección
Corresponde a la transmisión del calor en los líquidos y gases por elmovimiento de sus moléculas, en forma de corrientes cálidas ascendentes yfrías descendentes.
Esta forma de propagación es exclusiva de los fluidos, en los que susmoléculas se encuentran bastante separadas entre sí, lo que les permitemoverse y trasladarse desde un lugar a otro. Así se explica el tiraje de laschimeneas, la calefacción de las habitaciones mediante estufas de cualquiertipo, la formación de los vientos, algunos tipos característicos de las brisasmarinas, las terrales y el aire acondicionado.
Durante los días calurosos se produce una suave brisa desde el mar haciatierra firme. Ésta es causada porque la tierra al tener menor capacidad calóricaque el agua, se calienta emitiendo calor más a prisa. Así, la tierra calienta lacapa de aire sobre ella, la que comienza a ascender. El espacio que es dejadopor esta capa es llenado por aire frío proveniente del océano.
Durante las noches el sentido de la corriente convectiva se invierte debidoa que el agua se enfría más lentamente que la superficie de la tierra. De esemodo, el aire más cálido sobre el mar asciende y el aire más frío proveniente detierra firme ocupa su lugar.
En los refrigeradores, también se observa la formación de corrientes deconvección. En la parte superior las capas de aire que se encuentran encontacto con el congelador, le ceden calor por conducción. Debido a esto elaire de esta región se vuelve más denso y se dirige hacia la parte inferior delrefrigerador, mientras las capas de aire que ahí se encuentran se desplazanhacia arriba. Esta circulación de aire causada por la convección hace que latemperatura sea homogénea en todos los puntos al interior del refrigerador.
La convección del calor en la atmósfera da lugar a la circulación de masasde aire en ellas.
c. Radiación
Un termómetro, situado en el exterior de la campana, indicará una elevaciónde temperatura, mostrando que existe transmisión de calor a través del vacíoque hay entre el cuerpo caliente y el exterior. La transmisión no pudo haberseefectuado por conducción ni por convección, pues estos procesos sólo puedenocurrir cuando hay un medio material a través del cual se pueda transferir elcalor. En este caso, la transmisión de calor se lleva a cabo mediante unproceso llamado “radiación térmica”. El calor que nos llega del Sol se debe aeste mismo proceso, ya que entre él y la Tierra existe un medio vacío. Lo mismoocurre con el calor que proviene de una lámpara.
Luego, el calor puede transmitirse a grandes distancias sin calentar enforma apreciable el espacio intermedio y se produce mediante ondas calóricassemejantes a la de radio o electromagnéticas.
Todos los cuerpos calientes emiten radiaciones térmicas que, cuando sonabsorbidas por algún otro cuerpo, provocan en él un aumento de temperatura.
De manera general, el calor que recibe una persona cuando está cerca deun cuerpo caliente llega hasta ella por los tres procesos: conducción,convección y radiación. Cuanto mayor sea la temperatura del cuerpo caliente,tanto mayor será la cantidad de calor transmitida por radiación, como sucedecuando uno se halla cerca de un horno o de una fogata. Cuando la energíaradiante choca con un cuerpo, no es absorbida completamente, gran parte serefleja y el resto se transmite a través del cuerpo.
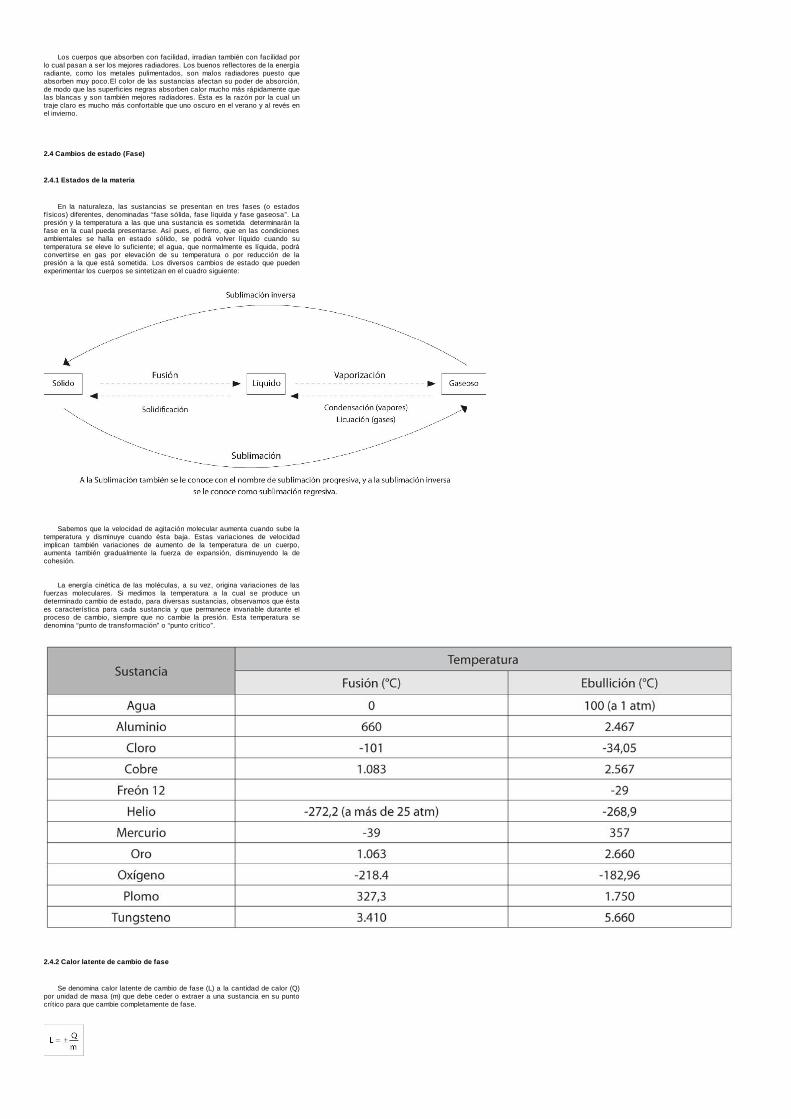
Los cuerpos que absorben con facilidad, irradian también con facilidad porlo cual pasan a ser los mejores radiadores. Los buenos reflectores de la energíaradiante, como los metales pulimentados, son malos radiadores puesto queabsorben muy poco.El color de las sustancias afectan su poder de absorción,de modo que las superficies negras absorben calor mucho más rápidamente quelas blancas y son también mejores radiadores. Ésta es la razón por la cual untraje claro es mucho más confortable que uno oscuro en el verano y al revés enel invierno.
2.4 Cambios de estado (Fase)
2.4.1 Estados de la materia
En la naturaleza, las sustancias se presentan en tres fases (o estadosfísicos) diferentes, denominadas “fase sólida, fase líquida y fase gaseosa”. Lapresión y la temperatura a las que una sustancia es sometida determinarán lafase en la cual pueda presentarse. Así pues, el fierro, que en las condicionesambientales se halla en estado sólido, se podrá volver líquido cuando sutemperatura se eleve lo suficiente; el agua, que normalmente es líquida, podráconvertirse en gas por elevación de su temperatura o por reducción de lapresión a la que está sometida. Los diversos cambios de estado que puedenexperimentar los cuerpos se sintetizan en el cuadro siguiente:
Sabemos que la velocidad de agitación molecular aumenta cuando sube latemperatura y disminuye cuando ésta baja. Estas variaciones de velocidadimplican también variaciones de aumento de la temperatura de un cuerpo,aumenta también gradualmente la fuerza de expansión, disminuyendo la decohesión.
La energía cinética de las moléculas, a su vez, origina variaciones de lasfuerzas moleculares. Si medimos la temperatura a la cual se produce undeterminado cambio de estado, para diversas sustancias, observamos que éstaes característica para cada sustancia y que permanece invariable durante elproceso de cambio, siempre que no cambie la presión. Esta temperatura sedenomina “punto de transformación” o “punto crítico”.
2.4.2 Calor latente de cambio de fase
Se denomina calor latente de cambio de fase (L) a la cantidad de calor (Q)por unidad de masa (m) que debe ceder o extraer a una sustancia en su puntocrítico para que cambie completamente de fase.
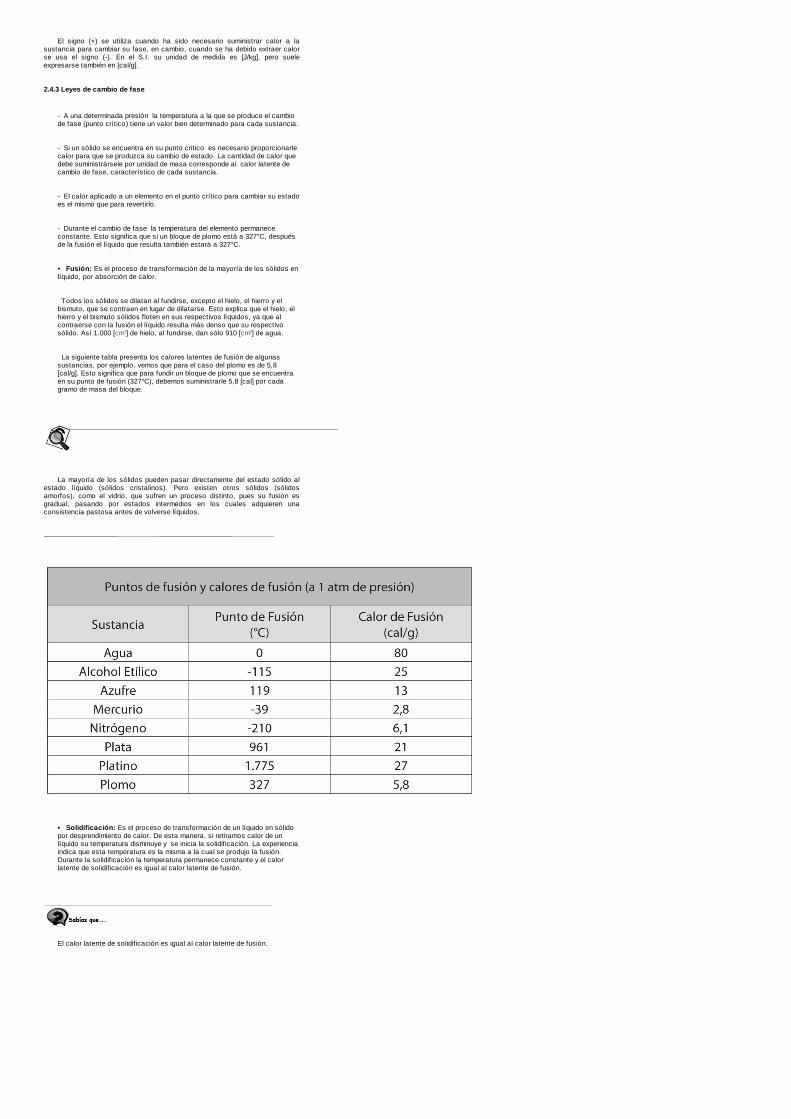
El signo (+) se utiliza cuando ha sido necesario suministrar calor a lasustancia para cambiar su fase, en cambio, cuando se ha debido extraer calorse usa el signo (-). En el S.I. su unidad de medida es [J/kg], pero sueleexpresarse también en [cal/g].
2.4.3 Leyes de cambio de fase
- A una determinada presión la temperatura a la que se produce el cambiode fase (punto crítico) tiene un valor bien determinado para cada sustancia.
- Si un sólido se encuentra en su punto critico es necesario proporcionarlecalor para que se produzca su cambio de estado. La cantidad de calor que debe suministrársele por unidad de masa corresponde al calor latente decambio de fase, característico de cada sustancia.
- El calor aplicado a un elemento en el punto crítico para cambiar su estadoes el mismo que para revertirlo.
- Durante el cambio de fase la temperatura del elemento permanececonstante. Esto significa que si un bloque de plomo está a 327°C, despuésde la fusión el líquido que resulta también estará a 327°C.
• Fusión: Es el proceso de transformación de la mayoría de los sólidos enlíquido, por absorción de calor.
Todos los sólidos se dilatan al fundirse, excepto el hielo, el hierro y elbismuto, que se contraen en lugar de dilatarse. Esto explica que el hielo, elhierro y el bismuto sólidos floten en sus respectivos líquidos, ya que alcontraerse con la fusión el líquido resulta más denso que su respectivosólido. Así 1.000 [cm3] de hielo, al fundirse, dan sólo 910 [cm3] de agua.
La siguiente tabla presenta los calores latentes de fusión de algunassustancias, por ejemplo, vemos que para el caso del plomo es de 5,8[cal/g]. Esto significa que para fundir un bloque de plomo que se encuentraen su punto de fusión (327°C), debemos suministrarle 5,8 [cal] por cadagramo de masa del bloque.
La mayoría de los sólidos pueden pasar directamente del estado sólido alestado líquido (sólidos cristalinos). Pero existen otros sólidos (sólidosamorfos), como el vidrio, que sufren un proceso distinto, pues su fusión esgradual, pasando por estados intermedios en los cuales adquieren unaconsistencia pastosa antes de volverse líquidos.
• Solidificación: Es el proceso de transformación de un líquido en sólidopor desprendimiento de calor. De esta manera, si retiramos calor de unlíquido su temperatura disminuye y se inicia la solidificación. La experienciaindica que esta temperatura es la misma a la cual se produjo la fusión.Durante la solidificación la temperatura permanece constante y el calorlatente de solidificación es igual al calor latente de fusión.
El calor latente de solidificación es igual al calor latente de fusión.
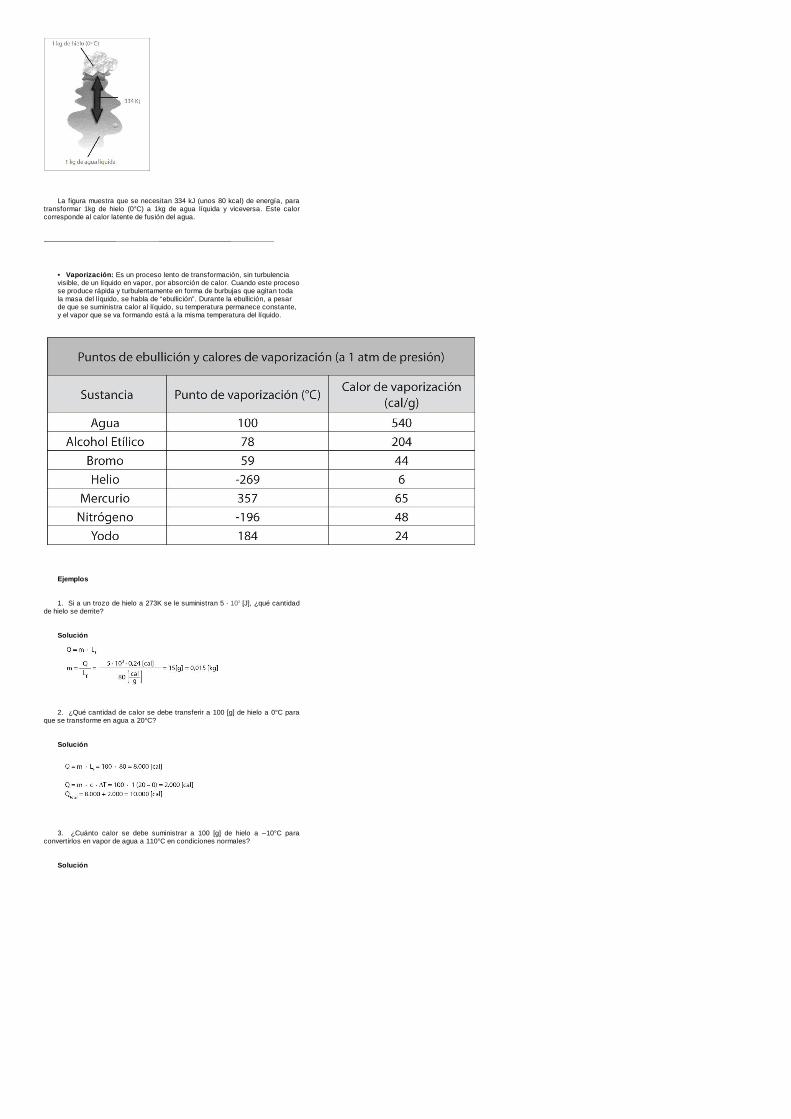
La figura muestra que se necesitan 334 kJ (unos 80 kcal) de energía, paratransformar 1kg de hielo (0°C) a 1kg de agua líquida y viceversa. Este calorcorresponde al calor latente de fusión del agua.
• Vaporización: Es un proceso lento de transformación, sin turbulenciavisible, de un líquido en vapor, por absorción de calor. Cuando este procesose produce rápida y turbulentamente en forma de burbujas que agitan todala masa del líquido, se habla de “ebullición”. Durante la ebullición, a pesarde que se suministra calor al líquido, su temperatura permanece constante,y el vapor que se va formando está a la misma temperatura del líquido.
Ejemplos
1. Si a un trozo de hielo a 273K se le suministran 5 · 103 [J], ¿qué cantidadde hielo se derrite?
Solución
2. ¿Qué cantidad de calor se debe transferir a 100 [g] de hielo a 0°C paraque se transforme en agua a 20°C?
Solución
3. ¿Cuánto calor se debe suministrar a 100 [g] de hielo a –10°C paraconvertirlos en vapor de agua a 110°C en condiciones normales?
Solución
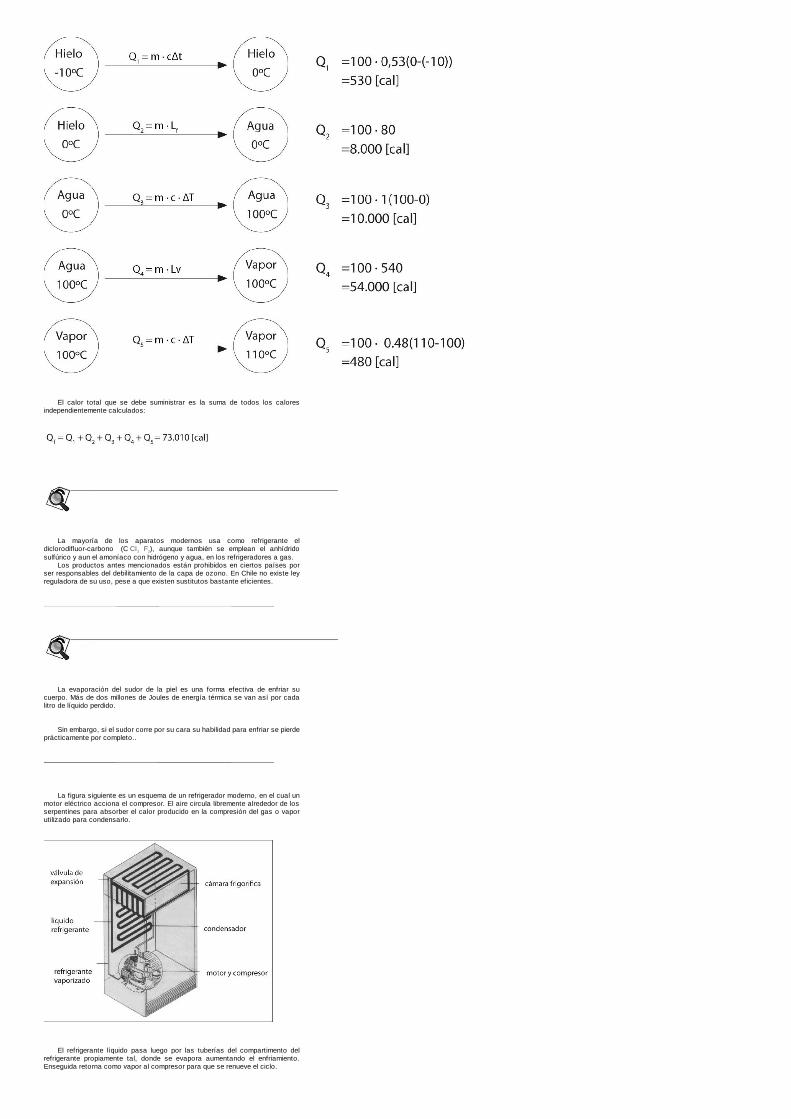
El calor total que se debe suministrar es la suma de todos los caloresindependientemente calculados:
La mayoría de los aparatos modernos usa como refrigerante eldiclorodifluor-carbono (C CI2 F2), aunque también se emplean el anhídridosulfúrico y aun el amoníaco con hidrógeno y agua, en los refrigeradores a gas.
Los productos antes mencionados están prohibidos en ciertos países porser responsables del debilitamiento de la capa de ozono. En Chile no existe leyreguladora de su uso, pese a que existen sustitutos bastante eficientes.
La evaporación del sudor de la piel es una forma efectiva de enfriar sucuerpo. Más de dos millones de Joules de energía térmica se van así por cadalitro de líquido perdido.
Sin embargo, si el sudor corre por su cara su habilidad para enfriar se pierdeprácticamente por completo..
La figura siguiente es un esquema de un refrigerador moderno, en el cual unmotor eléctrico acciona el compresor. El aire circula libremente alrededor de losserpentines para absorber el calor producido en la compresión del gas o vaporutilizado para condensarlo.
El refrigerante líquido pasa luego por las tuberías del compartimento delrefrigerante propiamente tal, donde se evapora aumentando el enfriamiento.Enseguida retorna como vapor al compresor para que se renueve el ciclo.
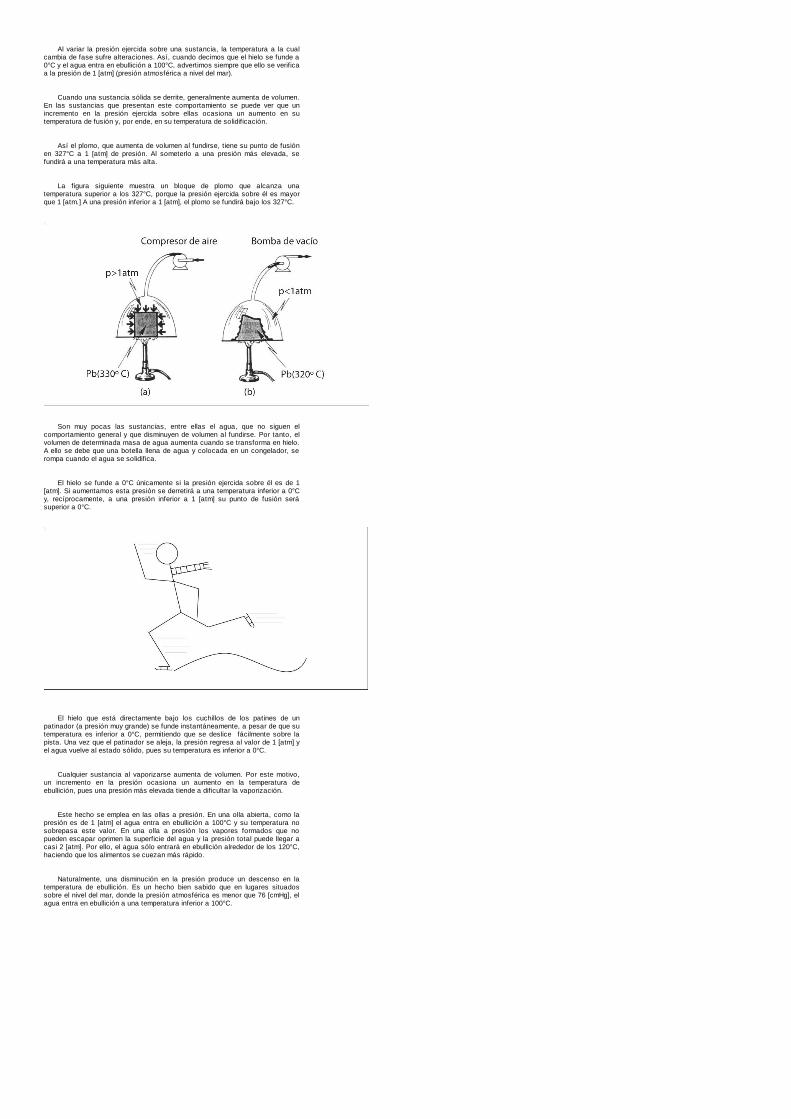
Al variar la presión ejercida sobre una sustancia, la temperatura a la cualcambia de fase sufre alteraciones. Así, cuando decimos que el hielo se funde a0°C y el agua entra en ebullición a 100°C, advertimos siempre que ello se verificaa la presión de 1 [atm] (presión atmosférica a nivel del mar).
Cuando una sustancia sólida se derrite, generalmente aumenta de volumen.En las sustancias que presentan este comportamiento se puede ver que unincremento en la presión ejercida sobre ellas ocasiona un aumento en sutemperatura de fusión y, por ende, en su temperatura de solidificación.
Así el plomo, que aumenta de volumen al fundirse, tiene su punto de fusiónen 327°C a 1 [atm] de presión. Al someterlo a una presión más elevada, sefundirá a una temperatura más alta.
La figura siguiente muestra un bloque de plomo que alcanza unatemperatura superior a los 327°C, porque la presión ejercida sobre él es mayorque 1 [atm.] A una presión inferior a 1 [atm], el plomo se fundirá bajo los 327°C.
Son muy pocas las sustancias, entre ellas el agua, que no siguen el
comportamiento general y que disminuyen de volumen al fundirse. Por tanto, elvolumen de determinada masa de agua aumenta cuando se transforma en hielo.A ello se debe que una botella llena de agua y colocada en un congelador, serompa cuando el agua se solidifica.
El hielo se funde a 0°C únicamente si la presión ejercida sobre él es de 1[atm]. Si aumentamos esta presión se derretirá a una temperatura inferior a 0°Cy, recíprocamente, a una presión inferior a 1 [atm] su punto de fusión serásuperior a 0°C.
El hielo que está directamente bajo los cuchillos de los patines de unpatinador (a presión muy grande) se funde instantáneamente, a pesar de que sutemperatura es inferior a 0°C, permitiendo que se deslice fácilmente sobre lapista. Una vez que el patinador se aleja, la presión regresa al valor de 1 [atm] yel agua vuelve al estado sólido, pues su temperatura es inferior a 0°C.
Cualquier sustancia al vaporizarse aumenta de volumen. Por este motivo,un incremento en la presión ocasiona un aumento en la temperatura deebullición, pues una presión más elevada tiende a dificultar la vaporización.
Este hecho se emplea en las ollas a presión. En una olla abierta, como lapresión es de 1 [atm] el agua entra en ebullición a 100°C y su temperatura nosobrepasa este valor. En una olla a presión los vapores formados que nopueden escapar oprimen la superficie del agua y la presión total puede llegar acasi 2 [atm]. Por ello, el agua sólo entrará en ebullición alrededor de los 120°C,haciendo que los alimentos se cuezan más rápido.
Naturalmente, una disminución en la presión produce un descenso en latemperatura de ebullición. Es un hecho bien sabido que en lugares situadossobre el nivel del mar, donde la presión atmosférica es menor que 76 [cmHg], elagua entra en ebullición a una temperatura inferior a 100°C.
Para una masa de gas, calentada a presión constante, los volúmenes sondirectamente proporcionales a las temperaturas absolutas.
y a volumen constante, las presiones son directamente proporcionales a lastemperaturas absolutas.
De todo ello se puede deducir la ecuación general del estado gaseoso.
En lo alto del Monte Everest, por ejemplo, cuya altitud es de 8.800 [m] y lapresión atmosférica es de sólo 26 [cmHg], el agua entra en ebullición a 72°C.
Entonces, el tratar de cocinar al modo usual en lo alto del monte Everest,sin contar con una olla de presión, se convierte en una tarea muy difícil o casiimposible con algunos alimentos. Al reducir gradualmente la presión sobre lasuperficie del agua, su temperatura de ebullición se vuelve cada vez menor ypuede obtenerse que ésta hierva incluso a temperaturas muy bajas. Por ejemplo,si con una bomba de vacío redujésemos la presión a 17 [cmHg], podríamoshacer hervir el agua a 20°C.
Santiago está a una altura de 520[m] sobre el nivel del mar y el agua quehacemos hervir para tomar el té no está realmente a 100°C sino a 98°C. En SanPedro de Atacama, que se encuentra sobre los 3.000 [m] de altura sobre el niveldel mar, el agua hierve aproximadamente a 92°C.
• Licuefacción o Condensación: Es el proceso de transformación de ungas o vapor no saturante en líquido.
Para lograr la licuación de un gas es necesario convertirlo primero en unvapor saturado, lo cual se consigue comprimiéndolo, enfriándolo ocombinando ambos procedimientos.
La licuefacción o condensación es un proceso inverso al de lavaporización, en que el vapor deberá liberar calor para liquidificarse.
A temperaturas extremadamente bajas los cuerpos adquieren propiedadesextrañas. Por ejemplo, el caucho y la carne se tornan quebradizos alendurecerse sumergido en aire líquido; el plomo se vuelve elástico; elmercurio se solidifica, etc.
La temperatura a la cual el vapor de agua contenido en el aire comienza acondensarse se llama “punto de rocío”, de modo que para que la precipitaciónse produzca, la temperatura del aire debe alcanzar el punto de rocío.
Si el vapor condensado permanece en suspensión a baja altura, origina lasneblinas, y si lo hace a gran altura, constituye las nubes.
Si precipita en muy poca cantidad, forma el rocío y en gran cantidad, lalluvia.
Cuando la temperatura baja a 0°C, mientras ocurre la precipitación, el rocíose solidifica originando la escarcha. Si esto ocurre con las gotas de lluvia,resulta el granizo.
La nieve se produce al solidificarse el vapor condensado que forma lasnubes.
• Sublimación: En condiciones apropiadas de temperatura y presión, unasustancia puede pasar directamente del estado sólido al estado de vapor,sin pasar por el líquido. Esta transformación directa de sólido a vapor sellama Sublimación.
Si colocamos una bola de naftalina en el interior de un armario,observamos que pasa al estado de vapor sin antes pasar por el líquido.Este hecho también se produce con el anhídrido carbónico sólido (CO2) y,por ello, se denomina comúnmente “hielo seco”.
Aunque sean pocas las sustancias que se subliman en condicionesambientales, podemos observar que este fenómeno puede producirse concualquier sustancia. Ello depende de la temperatura y de la presión a la queesté sometido.
El proceso inverso también se llama sublimación, y para hacer la diferenciase le llama sublimación inversa.
Nota: La sublimación es un caso particular de vaporización.
2.5 Equivalente mecánico del calor
En la época de los griegos los fenómenos relacionados con el calor seexplicaban con la “Teoría del flogisto”, la que planteaba que en los cuerposinflamables y en aquellos de fácil combustión estaba presente una sustanciallamada flogisto, que escapaba cuando se producía la combustión. Esta teoríallegó a su fin después de una serie de experimentos que establecieron el papeldel oxígeno en la combustión. Posteriormente, siguieron dos nuevas hipótesis sobre el calor, que estuvieron vigentes desde la época del Renacimiento hasta
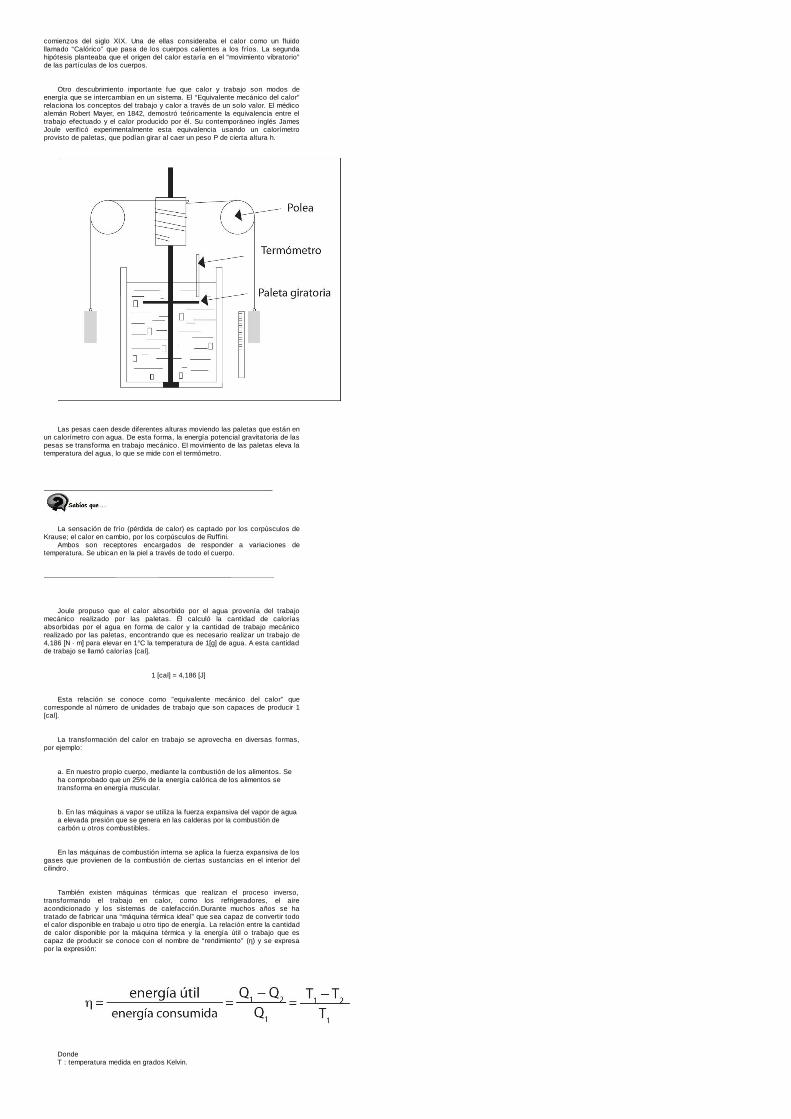
comienzos del siglo XIX. Una de ellas consideraba el calor como un fluidollamado “Calórico” que pasa de los cuerpos calientes a los fríos. La segundahipótesis planteaba que el origen del calor estaría en el “movimiento vibratorio”de las partículas de los cuerpos.
Otro descubrimiento importante fue que calor y trabajo son modos deenergía que se intercambian en un sistema. El “Equivalente mecánico del calor”relaciona los conceptos del trabajo y calor a través de un solo valor. El médicoalemán Robert Mayer, en 1842, demostró teóricamente la equivalencia entre eltrabajo efectuado y el calor producido por él. Su contemporáneo inglés JamesJoule verificó experimentalmente esta equivalencia usando un calorímetroprovisto de paletas, que podían girar al caer un peso P de cierta altura h.
Las pesas caen desde diferentes alturas moviendo las paletas que están enun calorímetro con agua. De esta forma, la energía potencial gravitatoria de laspesas se transforma en trabajo mecánico. El movimiento de las paletas eleva latemperatura del agua, lo que se mide con el termómetro.
La sensación de frío (pérdida de calor) es captado por los corpúsculos deKrause; el calor en cambio, por los corpúsculos de Ruffini.
Ambos son receptores encargados de responder a variaciones detemperatura. Se ubican en la piel a través de todo el cuerpo.
Joule propuso que el calor absorbido por el agua provenía del trabajomecánico realizado por las paletas. Él calculó la cantidad de caloríasabsorbidas por el agua en forma de calor y la cantidad de trabajo mecánicorealizado por las paletas, encontrando que es necesario realizar un trabajo de4,186 [N · m] para elevar en 1°C la temperatura de 1[g] de agua. A esta cantidadde trabajo se llamó calorías [cal].
1 [cal] = 4,186 [J]
Esta relación se conoce como ”equivalente mecánico del calor” quecorresponde al número de unidades de trabajo que son capaces de producir 1[cal].
La transformación del calor en trabajo se aprovecha en diversas formas,por ejemplo:
a. En nuestro propio cuerpo, mediante la combustión de los alimentos. Seha comprobado que un 25% de la energía calórica de los alimentos setransforma en energía muscular.
b. En las máquinas a vapor se utiliza la fuerza expansiva del vapor de aguaa elevada presión que se genera en las calderas por la combustión decarbón u otros combustibles.
En las máquinas de combustión interna se aplica la fuerza expansiva de losgases que provienen de la combustión de ciertas sustancias en el interior delcilindro.
También existen máquinas térmicas que realizan el proceso inverso,transformando el trabajo en calor, como los refrigeradores, el aireacondicionado y los sistemas de calefacción.Durante muchos años se hatratado de fabricar una “máquina térmica ideal” que sea capaz de convertir todoel calor disponible en trabajo u otro tipo de energía. La relación entre la cantidadde calor disponible por la máquina térmica y la energía útil o trabajo que escapaz de producir se conoce con el nombre de “rendimiento” (η) y se expresapor la expresión:
DondeT : temperatura medida en grados Kelvin.
Podemos estimar el rendimiento del cuerpo humano, por ejemplo,considerando la energía consumida en los alimentos y la energía útil producidaen el trabajo muscular.
El valor aproximado del rendimiento del cuerpo humano es un 20%, aunquevaría con las diferentes actividades.
La experiencia diaria nos confirma que el calor puede producir trabajo y que,recíprocamente, el trabajo puede producir calor.
Sin embargo, en los procesos de transformación de una en otra, existe unadiferencia esencial mientras la energía mecánica puede ser totalmenteconvertida en calor con facilidad, la energía calórica sólo puede serparcialmente transformada en energía mecánica.
A la unidad resultante, Newton (N) por metros (m), se llamó más tarde Joule,en honor a su descubridor.
Ejemplos
1. Una joven pareja se sobrepasó una tarde, comiendo demasiado helado ypastel. Puesto que ambos consumieron 500 kilocalorías de más, deseancompensarlo mediante una cantidad equivalente de trabajo subiendo escaleras.Si cada uno tiene una masa de 60 [kg], ¿qué altura total de escalera deberásubir cada uno?
Solución
T = 500 [Kcal] = 500 · 4,186 · 103 = 2,09 · 106 [J] T = mg h 2,09 · 106 = 60 · 10 · h h = 3.483 [m].
Si logran subir está cantidad de metros, perderán la energía adquirida por elexceso de helado y pastel.
2. Los vapores de la caldera en una máquina a vapor alcanzan a 180°C queson expulsados a la atmósfera a 100°C. ¿Cuál es el rendimiento máximo de estamáquina?
Solución
2.6 Transformaciones de energía y su conservación
El principio de conservación de la energía establece que en un sistemaaislado la energía antes de un proceso es igual en cantidad a la energía totaldespués del proceso o bien que la energía mecánica y calórica total de unsistema aislado permanece constante.
Esto implica que cuando un cuerpo cede energía a otro, la energía perdidapor el primero es igual a la energía ganada por el segundo.
El siguiente esquema muestra algunos mecanismos que realizantransformaciones de energía y cómo éstas generan calor.
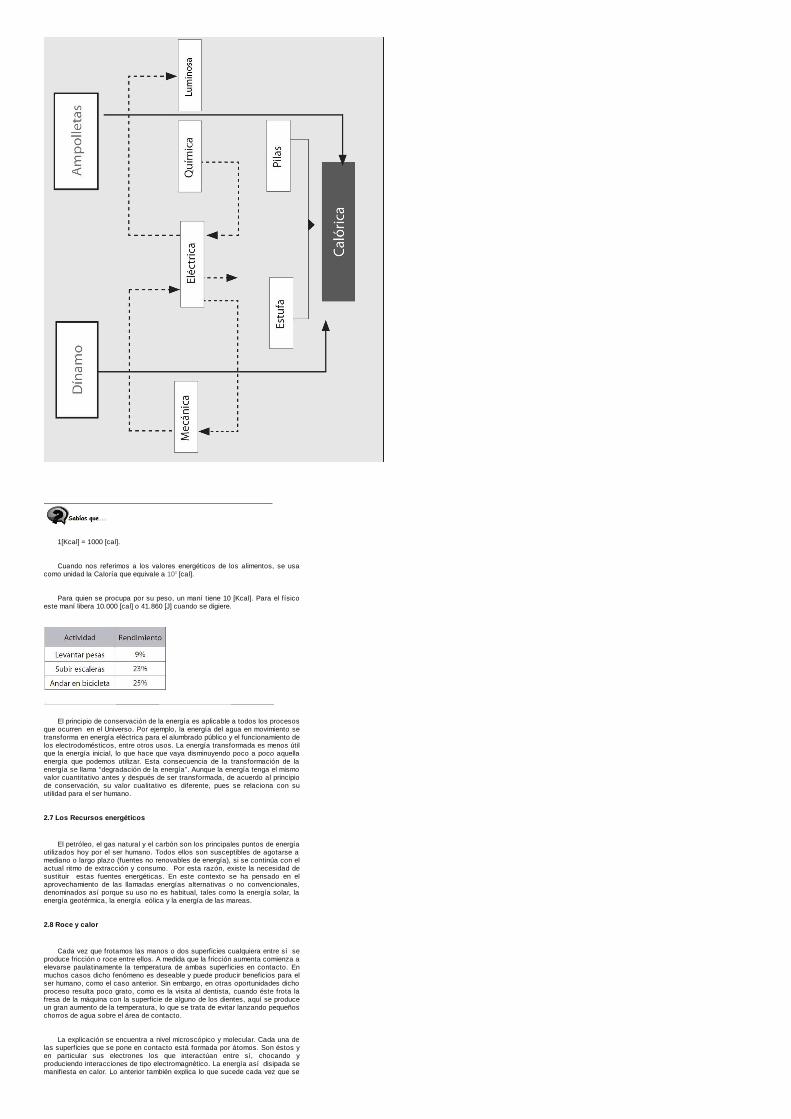
1[Kcal] = 1000 [cal].
Cuando nos referimos a los valores energéticos de los alimentos, se usacomo unidad la Caloría que equivale a 103 [cal].
Para quien se procupa por su peso, un maní tiene 10 [Kcal]. Para el físicoeste maní libera 10.000 [cal] o 41.860 [J] cuando se digiere.
El principio de conservación de la energía es aplicable a todos los procesosque ocurren en el Universo. Por ejemplo, la energía del agua en movimiento setransforma en energía eléctrica para el alumbrado público y el funcionamiento delos electrodomésticos, entre otros usos. La energía transformada es menos útilque la energía inicial, lo que hace que vaya disminuyendo poco a poco aquellaenergía que podemos utilizar. Esta consecuencia de la transformación de laenergía se llama “degradación de la energía”. Aunque la energía tenga el mismovalor cuantitativo antes y después de ser transformada, de acuerdo al principiode conservación, su valor cualitativo es diferente, pues se relaciona con suutilidad para el ser humano.
2.7 Los Recursos energéticos
El petróleo, el gas natural y el carbón son los principales puntos de energíautilizados hoy por el ser humano. Todos ellos son susceptibles de agotarse amediano o largo plazo (fuentes no renovables de energía), si se continúa con elactual ritmo de extracción y consumo. Por esta razón, existe la necesidad desustituir estas fuentes energéticas. En este contexto se ha pensado en elaprovechamiento de las llamadas energías alternativas o no convencionales,denominados así porque su uso no es habitual, tales como la energía solar, laenergía geotérmica, la energía eólica y la energía de las mareas.
2.8 Roce y calor
Cada vez que frotamos las manos o dos superficies cualquiera entre sí seproduce fricción o roce entre ellos. A medida que la fricción aumenta comienza aelevarse paulatinamente la temperatura de ambas superficies en contacto. Enmuchos casos dicho fenómeno es deseable y puede producir beneficios para elser humano, como el caso anterior. Sin embargo, en otras oportunidades dichoproceso resulta poco grato, como es la visita al dentista, cuando éste frota lafresa de la máquina con la superficie de alguno de los dientes, aquí se produceun gran aumento de la temperatura, lo que se trata de evitar lanzando pequeñoschorros de agua sobre el área de contacto.
La explicación se encuentra a nivel microscópico y molecular. Cada una delas superficies que se pone en contacto está formada por átomos. Son éstos yen particular sus electrones los que interactúan entre sí, chocando yproduciendo interacciones de tipo electromagnético. La energía así disipada semanifiesta en calor. Lo anterior también explica lo que sucede cada vez que se
enciende una ampolleta, se aplican los frenos en las bicicletas o automóviles yen los viajes espaciales, y cuando las naves ingresan a la atmósfera, en dondeel roce genera calor.
1. Calor específico: Capacidad calórica por unidad de masa, que escaracterística de cada sustancia.
2. Calor latente de cambio de fase: Cantidad de calor por unidad de masaque se debe ceder o extraer a una sustancia en su punto crítico para quecambie completamente de fase.
CAPÍTULO 8: LA TIERRA Y SU ENTORNO
Aprendizajes esperadosAl completar la unidad, alumnos y alumnas podrán:
• Reconocer que los fenómenos naturales que afectan seriamente susvidas son estudiables y comprensibles mediante conceptos básicossencillos (por ejemplo, los terremotos a través de movimiento de placas,vibraciones y propagación de ondas).• Adquirir una visión cósmica de la Tierra, en cuanto asusdimensiones,comportamiento, composición y ubicación en el Universo.
Las primeras imágenes de la Tierra desde el exterior fueron captadas por latripulación del Apolo 8: la visión de un brillante globo azul, flotando en lainmensidad negra, sedujo a los astronautas norteamericanos. Desde entonces,la Tierra recibe el nombre de “el planeta azul”.
Desde la aparición del hombre, la observación de la naturaleza nos hadespertado tal interés, que aún hoy en día la contemplación del cielo y lo queestá más allá de él provoca una sensación equivalente ha ese miedo sagradode las primeras civilizaciones, mal llamadas primitivas.
A lo largo del desarrollo tecnológico de nuestra civilización grandespreguntas y fenómenos se han podido responder y predecir dentro del
comportamiento natural de nuestro sistema solar: las fases de la Luna, susposibles habitantes, la frecuencia de los eclipses, las estaciones, el movimientode los planetas. Sin embargo, a la vez existen grandes preguntas por realizar yresponder, probablemente sólo una parte de ellas podamos entender en nuestracorta pero intensa presencia como parte de un todo en este tercer Planeta delsistema solar.
1. Morfología de la Tierra
Probablemente en más de una oportunidad hemos visto en la televisiónalguna noticia catalogada como “catástrofe natural” al observar las secuelasde un terremoto o de un volcán en erupción que “devastó una regióndeterminada” del planeta; sin embargo, sin esas “catástrofes” nuestra Tierrasería una zona plana, erosionada y sin la diversidad ecológica que observamos.Los cerros, montañas y cordilleras son manifestaciones claras de la dinámicade nuestro planeta en la conformación del relieve. Lo que antes era parte delfondo submarino, hoy es la cumbre de una cordillera y viceversa. Una evidenciade estos profundos cambios corresponde al hallazgo de restos fósiles de flora yfauna marina en altas cumbres cordilleranas.
Paradójicamente en los últimos cien años, nuestra “moderna civilización” seha inclinado a una percepción de nuestro planeta similar a la que tenían lascivilizaciones más antiguas, interpretando sus fenómenos como procesosnormales y necesarios dentro de un organismo vivo en el cual, llegado elmomento, somos unos simples e impotentes espectadores de la magnitud de supoder.
Trilobites fósilesArriba: especímenes ciegos de hace quinientos millones de años. En el
centro y abajo, ejemplares más evolucionados. Los trilobites son uno de losmuchos productos del período Cámbrico.
1.1 Nacimiento de la T ierra
¿Qué edad tiene la T ierra?
Estudios científicos recientes de los elementos más antiguos que seevidencian en nuestro planeta estiman la formación de la Tierra hace alrededorde 4650 millones de años.
Se cree que la Tierra se formó de la primitiva nebulosa a partir de la cual seoriginaron, primero el Sol y más tarde los planetas, en un proceso de cuatrofases:
• La primera, denominada de acreación, consistió en la condensación delas partículas de la nube originando un protoplaneta rodeado de unaatmósfera rica en gases nobles e hidrógeno.
• En una segunda fase se produjo una fusión de los elementosconstitutivos del protoplaneta gracias a la compresión ejercida por lagravedad, a la energía liberada en la desintegración de elementosradiactivos y al calentamiento producido por la caída de meteoritos. Comoconsecuencia de esta fusión, los materiales más densos ocuparon elcentro de la Tierra y los más ligeros fueron desplazados hacia la corteza.La atmósfera primitiva, al no ser retenida por la gravedad, fue barrida por elviento solar y reemplazada por otra, compuesta por agua, metano y
amoníaco. Esta atmósfera, denominada proto-atmósfera por los geólogos,estaría cargada, además de ácidos como el clorhídrico y el fluorhídrico, yotras sustancias tóxicas como el monóxido de carbono.
• Posteriormente, en una tercera fase, la Tierra comenzó a enfriarse; elvapor de agua se condensó y aparecieron los océanos. Esto debió desuceder hace unos 4.000 millones de años, puesto que se han encontradorocas de esa edad de origen marino. En este período comienzan losprocesos de erosión, transporte y sedimentación de materiales alreaccionar el agua de la lluvia con las rocas. Surgen los primeroscontinentes y la actividad volcánica es muy intensa.
• Durante la cuarta fase la Tierra comenzó a adquirir su configuraciónactual. Se establecieron movimientos generalizados de placas, y se piensaque las placas actuales derivan de la unión de otras de dimensiones muchomás reducidas. Hace 2.200 millones de años ya había continentes yocéanos, y se daban procesos geodinámicos tanto internos (movimientosde placas) como externos (erosión) semejantes a los actuales.
Si le asociáramos a toda la historia de la Tierra (desde su formación hastahoy) un lapsus de 24:00 horas, podríamos observar que en toda nuestra historiacomo especie humana, sólo hemos sido testigos de una millonésima parte delúltimo segundo de esas 24 horas. Lo peor de todo, en ese tiempo hemosdesarrollado el poder de destruirla completamente arrasando con todo esteequilibrio natural.
1.2 Estructura de la T ierra
Los griegos fueron los primeros en establecer argumentos serios paraplantear la esfericidad de La Tierra cuatro siglos antes de Cristo. Hoy sabemosque La Tierra es un geoide (elipsoide irregular) que efectúa un movimiento degiro alrededor de su eje polar denominado Rotación demorando 23 horas, 56minutos, 4.09 segundos en dar una vuelta completa. A este período se ledenomina día sidéreo y corresponde a la rotación respecto a las estrellas. Elachatamiento que presenta en los Polos implica una variación del radiopromedio desde 6.378 [km] en el Ecuador hasta 6.357 [km] en los Polos.
Sus mayores cumbres se encuentran en el continente Asiáticoespecíficamente en la Cordillera de los Himalaya, comprendiendo 8.848 metrossobre el nivel del mar en el monte Everest. Su mayor depresión se encuentra enla fosa de las Marianas ubicada en Pacífico Oeste frente a Filipinas en unaextensión de 2.250 [km] de longitud y que alcanza, en el punto más profundo(Challenger), una dimensión de 10.924 metros bajo el nivel del mar.
1.3 Características de la T ierra
Los griegos plantearon que la Tierra era una esfera, posteriormente seconsideró plana y actualmente se sabe que es un geoide en rotación con radioecuatorial de 6.379 km y un radio polar de 6.357 km, cuya masa es 5.98 · 1024 kgy su volumen es 1.08 · 1018 m3
• La densidad promedio de las rocas que encontramos en la superficieterrestre es de 2,6 [g/cm3].
• El radio promedio es aproximadamente de 6,370 [km].• Su masa total aproximada es 5,98 x 1024 [kg].
1.4 Imán terreste
Dentro de las características relevantes de la Tierra se puede mencionar laexistencia de un polo magnético positivo y uno negativo y, por lo tanto, de“líneas de campo magnético”, circundando nuestro planeta de Norte a Sur talcomo en un imán tradicional, pero millones de veces mayor. El comportamientode una brújula, en la que la aguja imantada negativamente apunta siempre haciael Norte, se basa en este concepto o característica fundamental del CampoMagnético terrestre inventada por Los Chinos hacia el año 1000 d.C.
Las líneas del Campo Magnético terrestre, al igual que un imán tradicionalse orientan convencionalmente desde el polo Norte Magnético (Sur geográfico)hacia el polo Sur Magnético (Norte geográfico).
Por razones que los científicos aún no logran determinar esta polaridad seha invertido alrededor de 170 veces los últimos 100 millones de años.Actualmente, el Polo Norte Magnético se encuentra próximo al Sur Geográfico yviceversa.
La pregunta más simple que podría hacerse respecto a la existencia delCampo Magnético Terrestre es su origen, pero la verdad es que nadie ha podidoviajar realmente hasta el centro de la Tierra para confirmar o rechazar lahipótesis más atendible hasta este momento.Ésta se basa en el fenómeno deInducción Magnética que producirían los electrones de los metales fundidos enel Núcleo Externo Terrestre como consecuencia de su movimiento de Rotación.
La importancia de la existencia de estos polos magnéticos y, por lo tanto,del Campo Magnético Global, es variada. Abarca desde un sistema deorientación natural para aves y especies marinas que emigran estacionalmentesiguiendo las líneas de flujo magnético; hasta el comportamiento de plantas ensu ciclo vital, sin embargo, una de las más fundamentales e interesantescorresponde a la generación de una región denominada Magnetósfera, la cualcircunda La Tierra actuando como un escudo que protege la vida natural denuestro planeta de partículas y rayos de origen cósmico, como por ejemplo elViento Solar.
La manifestación visual más clara de este fenómeno corresponde aldesarrollo de las llamadas Auroras Boreales y Australes sobre los PolosMagnéticos Sur y Norte respectivamente, debidas a la interacción en laMagnetósfera entre las líneas de flujo y los iones y partículas procedentes delSol.
La Tierra es un imán terrestre.
1.5 Composición de la T ierra
En cuanto a la estructura terrestre se distinguen en su composición treselementos principales que determinan la clasificación por capas. La primeracorrespondiente al elemento tierra (Geósfera), la segunda por agua (Hidrosfera)y la tercera, una capa de gases que rodea a las anteriores (Atmósfera). Esclaro que superficialmente la Tierra esta cubierta en un 72% por agua, sinembargo, en cuanto a la masa o cantidad de materia, la Geósfera representa el99,9% de la masa del planeta, en cambio la hidrosfera representa el 0,029% y laatmósfera solo el 0,008%.
La Tierra es uno de los planetas más pequeños y más cercanos al Sol.Presenta forma esférica, algo achatada por los polos, con una superficie de 510millones de kilómetros cuadrados, un diámetro de 12.756,8 [km], masa de 5,976 ·1024 [kg] y una temperatura media de 14 °C.
La evidencia existente de la composición de la Geósfera está restringida asu superficie y a muestras tomadas de minas y sondajes, que en ningún casopenetran más allá de los 8 [km]. Procesos geológicos como el alzamiento desectores de la corteza y la erosión de ellos, pueden exponer rocas formadasalrededor de 20-25 [km] de profundidad.
A su vez, los volcanes expulsan pedazos de rocas que en algún momentopueden haber formado parte de capas más internas de la Tierra (mantosuperior).
Aparte de estos datos aislados, no hay evidencia directa concerniente a lacomposición del interior de La Tierra. Sin embargo, estudios geofísicos,particularmente sismológicos, entregan datos como densidad, rigidez ycompresibilidad de las diversas capas estructurales mayores de la Tierra.
Usando estos parámetros junto a otra evidencia como la composición demeteoritos (de naturaleza diferente a cualquier roca existente en la superficieterrestre, pero cuyas características físicas son comparables con algunas delas capas internas de ella) y la abundancia y distribución de elementos en elsistema solar, es posible decidir en cuanto a la composición más probable delas diversas partes de la Geósfera, estableciendo que nuestro planeta estaformado por tres regiones concéntricas bien definidas denominadas: Corteza,Manto y Núcleo.
1.6 Estructura de la T ierra
• Corteza: Es la región más superficial de la Geósfera y por ello la demenor temperatura. Esta compuesta por rocas en fase sólida, su espesorfluctúa entre 6 y 40 (km) Distinguiéndose su estructura heterogénea tantohorizontal como vertical.
En la horizontal se observa una corteza continental y otra Oceánica, laprimera fluctúa entres 6-8 [km] y esta compuesta por rocas de Silicio yMagnesio. La corteza continental posee un espesor de 30 a 40 [km],compuesta por rocas de Silicio y Aluminio. La densidad promedio de LaCorteza terrestre es de alrededor de 2,8 [g/cm3].
• Manto: Región que extiende bajo la corteza hasta unos 2.900 (km) deprofundidad. Las temperaturas en su interior oscilan entre los 1200 y 2800°C. Su densidad media es de unos 4,5 [g/cm3]. Su estado es de tipo plásticocompuesto principalmente por Silicatos de Fierro y Magnesio. El mantoterrestre se divide en dos regiones: El Manto Superior o Astenósfera quesirve de apoyo a las placas tectónicas y El Manto Inferior en el que debido alos gradientes de temperatura y densidad de material plástico se generancorrientes de convección que determinan en la astenósfera el movimiento delas placas tectónicas causantes de la actividad sísmica.
La corteza y el manto superior conforman la llamada Litosfera. La unióndiscontinua de material sólido (Corteza) y plástico (Astenósfera) se conocecomo Discontinuidad de Mohorovicic.
• Núcleo: Región más interna de La Tierra se extiende desde la base delmanto hasta el centro del planeta. Su espesor aproximado es de 3500 [km] ysu densidad media seria de unos 11 [g/cm3]. En el núcleo se diferencian doszonas: el núcleo externo de composición líquida que se caracteriza por lageneración de corrientes eléctricas, que sería el responsable del CampoMagnético Terrestre y El núcleo interno de composición hipotéticamentesólida. Contiene los elementos más densos del planeta.
En el centro hay un núcleo de hierro sólido, a 4.000 ºC de temperatura conun radio de 1.370 [km] aproximadamente, rodeado por un núcleo exterior dehierro líquido de alrededor de 2.000 [km] de espesor, que genera el campomagnético de la Tierra. Las rocas del manto, con unos 2.900 [km] yacenencima, cubiertas por las de la corteza, más ligeras. La atmósfera secompone de un 77% de nitrógeno, un 21% de oxígeno, una pequeñacantidad de vapor de agua y otros gases.
El núcleo externo fue descubierto por Beno Gutenberg en 1911, y la cortezaterrestre, por Mijailo Mohorovicic en 1915. Han pasado más de 90 años y aúnnos queda muchísimo por descubrir del interior de nuestro planeta.
El núcleo de la Tierra es un esferoide masivo de tamaño aproximado al delplaneta Marte.
Las corrientes en el núcleo terrestre son la causa del campo magnético dela Tierra.
1.7 La atmósfera
Nuestro planeta está rodeado de una región gaseosa denominadaAtmósfera, compuesta básicamente de cuatro capas principales: Troposfera,Estratosfera, Mesosfera y Termosfera. La atmósfera, en relación con laGeósfera, representa una cuarta parte del radio terrestre.

La Tierra desde el espacio vista por las naves espaciales Apolo y Landsat a unaaltura de varios miles de kilómetros. Izquierda: el Oriente próximo, África y, visible através de las nubes, el casquete polar antártico; Centro y Derecha: sistemastormentosos tropicalessobre Florida y el Golfo de México, el tiempo en un planeta con una atmósferamodesta
1.8 La hidrosfera
Toda el agua de la Tierra compone La Hidrosfera y según cálculos recientesse estima en unos 1,63 · 1015 litros, ya sea en su forma líquida, sólida ogaseosa. En su estado líquido, ésta cubre alrededor del 72% del planeta.
La Hidrosfera está directamente relacionada con el desarrollo de la vida, sudinámica depende de la energía solar y de la gravedad en nuestro planeta.Desde su inicio en el deshielo de nieve en la alta montaña, formando lagos através de ríos serpenteando tenazmente hacia el océano, glaciares en lascercanías de los polos, agua atmosférica y hasta napas subterráneas pocoprofundas.
La cantidad de agua en nuestro planeta se considera constante y enperpetua circulación por diversos estados físicos en un proceso denominado“Ciclo del agua” o Ciclo hidrológico. Este ciclo constituye un nexo vital entrela atmósfera, la geósfera y la hidrosfera, permitiendo crear las condiciones queposibilitan vida en nuestro planeta. Además, es el componente principal de losseres vivos, proporcionando el medio interno adecuado para producir la síntesisde compuestos complejos, el transporte de sustancias y la regulación de latemperatura corporal entre otros. La gran importancia del agua para la vida sedebe a sus propiedades.
Por ejemplo, tiene la propiedad de cambiar muy poco su temperatura alabsorber energía, esto hace que las variaciones de temperatura se presentenen forma suave y gradual, propiedad denominada “capacidad calórica” y tienegran importancia en la regulación del clima. Otra propiedad es que al descenderla temperatura aumenta su volumen.
Esto hace posible que cuando grandes masas de agua se congelan, solo lohagan superficialmente, preservando la vida bajo ellas. Además, el agua tiene lacapacidad de degradar (disolver) gran variedad de sustancias presentes en lanaturaleza, haciéndolas reutilizables indefinidamente.
1.9 Ciclo del agua
El agua circula constantemente desde los mares hasta la atmósfera ydesde ésta hasta la superficie terrestre, En este proceso el agua pasa a laatmósfera por evaporación o transpiración y vuelve al suelo por condensacióny precipitación.
1.10 Formación de los continentesDurante las últimas décadas desde los años sesenta la geología ha
experimentado un desarrollo revolucionario producido por el concepto de“Tectónica de placas”. La hipótesis tiene su antepasado científico en la “Teoríadel desplazamiento de los continentes” o también conocida por “Derivacontinental” presentada por Alfred Wegener (geofísico y meteorólogo alemán) ala comunidad científica en 1912. Luego de investigar las similitudes entre lasformas de las costas africanas y sudamericana, postuló que alguna vez huboun único supercontinente al que denominó Pangea, el cual comenzó afracturarse hace unos 200 millones de años (aproximadamente 22 horas 58minutos del “día” de historia de nuestro planeta) y que los fragmentos habríancomenzado un lento movimiento alrededor de la superficie terrestre. La teoría deWegener encontró en A.L du Toit un brillante defensor.
Etimológicamente “tectónica” significa “construcción” y proviene de lamisma raíz griega de arquitecto, por lo tanto, “tectónica de placas” significa, enforma generalizada, la construcción de los rasgos geológicos de la Tierra.Plantea que la interacción de placas Litosféricas debido a la variación detemperatura y densidad en el manto inferior genera corrientes de convecciónascendentes hacia el Manto Superior que sirve de apoyo a las placastectónicas ocasionando deslizamiento.

La “tectónica de placas” se ha convertido en el armazón para entender lanaturaleza de la Tierra a tal punto que casi todo estudio geológico se hace hoydentro de la terminología y esquema de esta teoría.
Ésta dice, en esencia, que la corteza terrestre y el manto superior de ellaestán divididos en un pequeño número de delgadas “placas” rígidas (10 ó 12placas “mayores”) que se mueven una respecto a la otra. El calor y lascorrientes de convección mencionadas mantienen las placas en movimiento.
El material de las placas mismas que se extiende hasta una profundidad delorden de los 100 [km] constituye la Litosfera.Esta teoría explica la actividadtectónica (formación de montañas y de océanos, deformación de rocas etc.) ysísmica que ocurre frecuentemente en zonas específicas de la superficieterrestre.
Como resultado de la interacción de estas placas internamente rígidas, ensus límites se producen zonas de inestabilidad tectónica como respuesta a laacción de esfuerzos internos de comprensión entre otros. El modelo se basa enla simple inspección de que la mayor parte de la energía mecánica liberada en lasuperficie terrestre ocurre en unas pocas franjas orogénicas angostas afectasa una importante deformación acompañada de una fuerte actividad sísmica,muchas veces asociada a volcanismo.
Las grandes placas delineadas por estos ”cinturones sísmicos” no sondeformadas excepto a lo largo de sus bordes. El movimiento que ocurre dentrode ellas está principalmente limitado a amplios movimientos epirogénicos (de“subida y bajada”) sin mayor deformación.
El término “placa tectónica” hace referencia a la estructura que conformanuestro planeta. En términos geológicos, una placa es una plancha rígida deroca sólida que conforma la superficie de la Tierra (litosfera), flotando sobre laroca ígnea y fundida que conforma el centro del planeta (Astenósfera). Lalitosfera tiene un grosor que varía entre los 15 y los 100 [km], siendo más gruesaen los continentes que en el fondo marino.
Así una premisa fundamental de esta teoría es que los cinturones sísmicosson zonas donde ocurren movimientos diferenciales, entre placas rígidas. Lasplacas pueden contener corteza oceánica al igual que corteza continental y loslimites entre continentes y océanos. Este hecho supera una de las objecionestradicionales a la deriva continental que era la dificultad de explicar como uncontinente, geológicamente “débil” podría deslizarse a través de un fondooceánico “resistente”. Según La Tectónica de placas, continentes y océanos,son llevados en una misma placa Litosférica semejante a una “correatransportadora”.
2. El dinamismo del planeta
2.1 Interacción entre placas
Las premisas fundamentales en que se basa la tectónica de placas son lassiguientes:
• Existe expansión de los océanos, donde corteza oceánica nueva se estagenerando continuamente en márgenes divergentes (dorsales) de placas.
• El área superficial de la Tierra es constante: la doble existencia demárgenes convergentes, donde se “consume” litosfera y de márgenesdivergentes donde se genera litosfera en volúmenes comparables, implicaque el diámetro de la Tierra no cambia radicalmente.
• Que una vez formada la corteza oceánica, forma parte de una placarígida que puede o no incorporar material continental.
Hay tres tipos básicos de márgenes entre placas:
• Divergente• Convergente• Conservador
• Márgenes divergentes (Constructivos o dorsales): Durante losprocesos de expansión y separación cortical, que ocurren a lo largo de lasdorsales (cordilleras) oceánicas, es creada la nueva corteza de carácteroceánica, la que unida a la parte superior del manto superior (litosfera) sealeja de ambos lados de la dorsal.
La corteza oceánica recién creada y su manto superior, está fuertemente“soldada a la cola” de la placa en movimiento. En consecuencia, una dorsalrepresenta una zona a lo largo de la cual se alejan dos placas entre sí,pero sin separarse, puesto que el material nuevo, proviene de laastenósfera, se agrega continuamente a la “cola” de cada una de lasplacas. La velocidad de expansión de los fondos oceánicos es de 2 a 18[cm] por año.
• Márgenes convergentes (Destructivos o fosas): Ocurre a lo largo delas profundas fosas oceánicas y que siempre son alargadas, bordeandocadenas volcánicas.
Las fosas son las zonas, donde dos placas convergen y a lo largo de lascuales una de ellas, la de mayor densidad, sub-escurre bajo la otra(subducción), con un ángulo de 45º (variando a lo largo de una mismafosa).
El doblamiento de la placa al hundirse crea la fosa. La placa, en sudesplazamiento hacia el interior de la Tierra, genera sismos profundos y elcalor de fricción creado a medida que se abre paso hacia el interior fundematerial que emerge a la superficie donde expulsa formando una cadenavolcánica paralela a la fosa.
Al enfriarse lentamente el material fundido que no alcanza la superficieterrestre en forma de lava a profundidades de 4 a 10 [km] se originan losgrandes cuerpos graníticos (batolitos), como el borde del margen oeste deSudamérica y que habría formado las “raíces” de cadenas volcánicasantiguas.
Las lavas y cenizas generadas por este tipo de cadena volcánica, asícomo los granitos que las acompañan a esas profundidades, contribuyen ala creación de la “corteza continental”.
Si la densidad de las placas es similar, su colisión origina, grandesdeformaciones o plegamientos en las zonas de contacto, fenómeno responsable de la formación de montañas (orogénesis) como es el caso dela Cordillera de los Himalaya.
La Cordillera Himaláyica se desarrolló en una serie de etapas hace 50millones de años. La placa continental que soporta a India chocó contra laplaca continental eurasiática, generando poderosos movimientos terrestres queelevaron el lecho del antiguo Mar de Tethys en un proceso que aún continúa (deahí los frecuentes temblores y terremotos en el área). Físicamente, los Himalayaestán constituidos por tres zonas paralelas: los Grandes Himalaya, el HimalayaMedio y los Sub Himalaya. Los Grandes Himalaya, la sección más alta, consistede una enorme línea de montañas formadas por gneiss y granito de 24 [km] deancho con una altitud promedio que excede los 6.100 metros. La línea de nievevaría entre los 4.480 [m] en el este hasta los 5.180 [m]. en el oeste..
• Márgenes transcurrentes o conservadores: A lo largo de estas, lasplacas no ganan ni pierden superficie, simplemente se deslizanparalelamente una a lo largo de la otra.
Un buen ejemplo es la “Falla de San Andrés” en California (EE.UU.), cuyodesplazamiento causó un devastador terremoto en 1906.
En 1906 en la costa oeste de los EE.UU., la ciudad de San Francisco y susalrededores es sacudida por un devastador terremoto de mas de 8 grados en laescala Richter a partir de las 5:12 a.m. del 18 de abril originado en la, hastaentonces poco conocida, falla geológica de San Andrés. Pavorosos incendiosconsumen gran parte de la ciudad debido a la falta de agua para combatirlos y ala combustibilidad de los materiales. Gran parte de la población debe serevacuada por mar. La catástrofe arroja un balance de cerca de 2.500 muertos yla destrucción de 28.000 edificios; 225.000 personas, mas de la mitad de lapoblación queda sin hogar y las pérdidas económicas son estimadas en más de400 millones de dólares..
2.2 Procesos modeladores del relieve terrestre
Analizando lo visto hasta ahora, podemos percibir la dinámica de nuestroplaneta. Sin ella la Tierra sería un paisaje monótono, llano, sin la diversidad deespecies animales y vegetales adaptadas a lo largo de generaciones a unhábitat específico.
Debido a agentes externos, la corteza Terrestre presenta evidenciasobservables de estos procesos. Dentro de los procesos modeladores del relieveencontramos:

En los endógenos no se conocen los agentes específicos solo sus efectos,esto por tratarse de fuerzas internas de la Tierra. A estos procesos también sele conoce como diastrofismo. Dentro del diastrofismo se destacan losfenómenos extremadamente lentos (cuasiestáticos) denominados orogénesis yepirogénesis que ha su vez producen los llamados movimientos diasfróticos.
• Epirogénico: Movimiento que experimenta la corteza terrestre en sentidovertical de ascenso o descenso relativo y que debido a la rigidez de ciertascapas de roca cortical se generan las fallas o facturas. A las zonaselevadas producto del fenómeno epirogenico se le conoce como Horst opilar, en cambio en las zonas más bajas o unidades se les denominanGraben.
• Orogénico : Movimiento que da origen a la formación de montañas y semanifiesta por fuerzas en sentido horizontal que al actuar sobre rocascorticales flexibles produces los llamados plegamientos. Relieve onduladocuya parte más elevada se denomina anticlinal y la depresión sinclinal.
Dentro de los agentes endógenos se pueden mencionar; la energíageotermal, que corresponde al calor interno del planeta, debido a explosionesnucleares producidas por la interacción de elementos radiactivos presentes enminerales a esa profundidad.
Otro agente endógeno corresponde al gradiente geotérmico, es decir, lavariación de temperatura que se produce en determinada zona cortical,dependiendo del “ambiente geológico”, ( volcán, glacial, etc.).
Otro agente importante se refiere a la energía sísmica liberada por laruptura del “equilibrio elástico” de una región cortical en la cual la energíaliberada se manifiesta por medio de ondas elásticas omnidireccionales y cuyoorigen puede ser volcánico (menos frecuentes) o tectónicos (los másfrecuentes).
Dentro de los procesos modeladores del terreno un proceso intermediotanto exógeno como endógeno, se refiere al volcanismo que corresponde a unconjunto de fenómenos geológicos que se manifiestan por medio de la apariciónde rocas en estado de fusión en la superficie terrestre o en sus cercanías. En elmundo existen aproximadamente 10.800 volcanes, de los cuales solo unos 300(menos del 3%), se encuentran activos.
El volcán es la parte más externa de un sistema magmático de grandesdimensiones. El magma proviene de la fusión parcial de las rocas del mantoterrestre. La erupción de un volcán, tiene su origen en las grandes presionesproducidas al interior de las llamadas “cámaras magmaticas” capaces degenerar corrientes ascendentes de magma a través de unos ductos conocidoscomo chimeneas, posteriormente el magma asciende hasta alcanzar lasuperficie terrestre emergiendo a través del cráter volcán con el nombre de lava.Los volcanólogos también han encontrado en la tectónica de placas, unarespuesta acerca del origen de la mayor parte de ellos y que se ubicarían en laszonas de contacto entre las placas, como sucede en la región de la Cordillerade Los Andes.
En cuanto a los sismos algunos de estos fenómenos del tipo endógeno sedeben a la ruptura de la cámara magmática y al ascenso brusco del magma enuna erupción volcánica, y como se dijo, son los más frecuentes. En otros casoslos sismos se producen por grandes deslizamientos, sin embargo, la granmayoría son de origen tectónico y se producen en las zonas de contacto entredos o más placas. Éste es el caso de nuestro país, donde la gran cantidad desismos que se producen se deben a la subducción de la placa de Nazca bajo laPlaca Sudamericana.

Hasta hoy, uno de los mayores problemas parala medición de un terremoto es la dificultad inicial para coordinar los registrosobtenidos por sismógrafos ubicados en diferentes puntos (“Red Sísmica”), de modoque no es inusual que las informaciones preliminares sean discordantes ya que sebasan en informes que registraron diferentes amplitudes de onda. Determinar elárea total abarcada por el sismo puede tardar varias horas o días de análisis delmovimiento mayor y de sus réplicas.La prontitud del diagnóstico es de importancia capital para echar a andar losmecanismos de ayuda en tales emergencias
Continentes en colisión
La corteza de la Tierra se compone de partes separadas (“placas”), queson desplazadas en torno al globo por corrientes de calor producidas dentro delplaneta. Hace unos 200 millones de años, todas las tierras estaban agrupadasen un supercontinente, el Pangea, que se separó para formar los continentesque existen actualmente. La roca fundida emergida de las fosas tectónicas queatraviesan todos los océanos continúa separando las placas, a velocidadsimilar a la del crecimiento de las uñas.
Allí donde las placas entran en colisión (por ejemplo, en torno al borde delPacífico) se expande a la superficie, surgen cordilleras y, al sufrir la corteza elempuje contra el manto, se producen terremotos y volcanes. Mediante esteproceso, llamado “tectónica de placas”, la Tierra se renueva de formaconstante.
2.3 Los sismos
Los sismos corresponden a fenómenos naturales de tipo endógeno, en elque la ruptura del “equilibrio elástico” de una determinada región corticalproduce la liberación de energía que se manifiesta por medio de ondasmecánicas, propagándose omnidireccionalmente. Pese a tratarse demovimientos bruscos, esporádicos y de corta duración, se desarrollan a partirde imperceptibles procesos cuasiestáticos de acumulación de energía por años,hasta siglos, reflejando con ello la dinámica interna de nuestro planeta.
Las causas del fenómeno telúrico pueden ser volcánicas o tambiéntectónicas. En las primeras (menos frecuentes) una erupción provocada por laruptura de una cámara magmática y el ascenso brusco de magma a la superficiea través de la chimenea implica la ruptura del equilibrio elástico de las rocascorticales. En otros casos estos mismos agentes se ven complementados porgrandes deslizamientos de Tierra o roca meteorizada.
En los tectónicos, la interacción entre placas adyacentes en las zonas decontacto de márgenes de tipo constructivo, conservadores o másfrecuentemente, en los destructivos, genera una alta actividad tectónica.Nuestro país corresponde a este último caso. Más del 90% de los sismosregistrados son producidos por la subducción de la placa de Nazca bajo laplaca Sudamericana.
Características
Durante el descenso relativo y constante de una de las placas bajo la otra,en un ángulo aproximado de 45º, la alta fricción de contacto arrastra materialque se va fragmentando regularmente. Sin embargo, debido a las diferentescaracterísticas físicas y mecánicas de las placas, la situación de equilibrioelástico del material deformado puede fracturarse abruptamente liberando en uncorto período toda la energía acumulada durante años, e incluso siglos, en uninexorable fenómeno cuasi estático.
Durante esta liberación instantánea de energía se dice que se ha roto elequilibrio elástico entre las placas. La energía se propaga en todas direccionesen un proceso ondulatorio a través del material cortical mecánicamenteelástico. Semejante al comportamiento de una cuerda de guitarra que al soltarlaabruptamente trata de distribuir esa energía acumulada oscilandoperiódicamente alrededor de su posición de equilibrio.
Al lugar al interior de la corteza donde ocurre específicamente esta rupturade equilibrio se denomina foco o hipocentro del sismo, mientras que laproyección vertical del foco hacia la superficie de la Tierra se denominaepicentro.
Existen tres tipos de onda sísmica. Sin embargo, las más conocidas sonlas llamadas ondas de cuerpo. Se propagan a través del interior de la cortezaterrestre y se componen de ondas primarias (P) y de secundarias (S). Las ondasP corresponden a ondas longitudinales, que pueden propagarse por mediossólidos y líquidos, generando esfuerzos de comprensión y descompresión delmedio elástico, en este caso: del material cortical. También se les denominaondas de presión. Son las primeras en ser detectadas pues tienen mayorvelocidad de propagación que las ondas S.
Las ondas S son transversales, solo pueden propagarse en medios sólidosy a menor velocidad que las primarias.
Existe otro tipo de ondas sísmicas, las llamadas superficiales u ondas L:son más lentas y las últimas en registrarse. Viajan por la superficie y los fondosmarinos a partir del epicentro (Las ondas P y S parten del hipocentro). Lasondas L son las responsables de los efectos más nocivos de un terremoto.
Si el medio de propagación no tiene rigidez (como en un líquido o gas) lavelocidad de la onda S es cero, es decir, no se propaga a diferencia de la ondaP
En un sismo, la onda P y la onda S salen del foco, con diferentesvelocidades. La onda P llega primero al sismógrafo, el tiempo hasta llega laonda P se mide con un reloj. Con la diferencia (delta t) entre la llegada de laonda P y de la onda S se puede calcular la distancia del sismo mediante:
vP= velocidad de la onda P.vS= velocidad de la onda S.d = distancia.delta t = tiempo entre la llegada de la onda P y la S.
Un sismo no siempre es perceptible para el ser humano, no así para aves,ratas y otros animales tienen mayor capacidad de percepción. El instrumentomás efectivo para registrar un sismo es el sismógrafo. El registro obtenido es elllamado sismograma y corresponde a un trazo continuo que representa lavariación de amplitud de las oscilaciones producidas por la onda sísmica en eltiempo. La duración, ubicación y magnitudes de un sismo pueden serdeterminadas a partir de los registros obtenidos por distintos sismógrafosorientados diferentemente, de acuerdo a los puntos cardinales en cada una delas distintas estaciones de monitoreo de la llamada Red Sísmica a lo largo delpaís.
A partir del sismograma se puede determinar características intrínsecas delsismo como la magnitud o energía liberada en el hipocentro y que dice relacióncon la amplitud de la onda sísmica. A diferencia de la intensidad, un sismoposee solamente una medida de magnitud y varias observaciones de intensidad.
2.3.1 Magnitud de escala Richter
Representa la energía sísmica liberada en cada terremoto y se basa en elregistro sismográfico. Es una escala que crece en forma potencial osemilogarítmica, de manera que cada punto de aumento puede significar unaumento de energía diez o más veces mayor. Una magnitud 4 no es el doble de2, sino que 100 veces mayor.
Aunque cada terremoto tiene una magnitud única, su efecto variaráenormemente según la distancia, la condición del terreno y los estándares deconstrucción entre otros factores.
Richter corresponde a una escala “abierta”, de modo que no hay un límitemáximo teórico, salvo el dado por la energía total acumulada en cada placa, loque sería una limitación de la Tierra y no de la escala.
Una buena manera de imaginarse la energía liberada por un terremoto segúnla Escala de Richter, es compararla con la energía liberada por la detonación deTNT. Nótese que la escala es de tipo logarítmico, es decir, no aumenta enproporción directa. En general la energía se va multiplicando por 30 por cadagrado de aumento de la escala (The Nevada Seismological Laboratory at theUniversity of Nevada, Reno).
El gran mérito de. Charles F. Richter consistió en asociar la magnitud delTerremoto con la “amplitud” de la onda sísmica, lo que implica la propagación delmovimiento en un área determinada. El análisis de esta onda (llamada “S”) en untiempo de 20 segundos en un registro sismográfico, sirvió como referencia de“calibración” de su Escala. Teóricamente en esta escala pueden darse sismos demagnitud negativa, lo que corresponderá a leves movimientos de baja liberación deenergía.
Isosistas o Líneas de intensidad. Son las que separan regiones de distintaintensidad sobre un mapa.
2.3.2 Intensidad en escala de Mercalli
La intensidad de un sismo se relaciona con los efectos y daños producidosen un lugar determinado. Varía, por lo tanto, con la distancia al hipocentro y conlas características del medio a lo largo del cual se propaga el sismo.
La cuantificación de la intensidad se efectúa en una escala cerrada,basada en la percepción subjetiva del observador y, por lo tanto, sin basematemática desde el nivel uno (I) al doce (XII) de descriptores ascendentesdesde la característica de apenas perceptible hasta uno en que producedestrucción total respectivamente.
Modificada en 1931 por Harry O. Wood y Frank Neuman Se expresa ennúmeros romanos. Creada en 1902 por el sismólogo italiano Giusseppe Mercalli,no se basa en los registros sismográficos sino en el efecto o daño producido enlas estructuras y en la sensación percibida por la gente.
Para establecer la Intensidad se recurre a la revisión de registroshistóricos, entrevistas a la gente, noticias de los diarios públicos y personales,etc. La Intensidad puede ser diferente en los diferentes sitios reportados paraun mismo terremoto (a diferencia de la Magnitud Richter que es una sola) ydependerá de:
• La energía del terremoto.• La distancia de la falla donde se produjo el terremoto.• La forma como las ondas llegan al sitio en que se registra (oblicua,perpendicular, etc.).• Las características geológicas del material subyacente del sitio donde seregistra la intensidad.• Cómo la población sintió o dejó registros del terremoto. Los grados noson equivalentes con la escala de Richter. Se expresa en números romanosy es proporcional, de modo que una Intensidad IV es el doble de II.
Resultado de un Sismo.
2.3.3 Comportamiento de las ondas sísmicas en las rocas
Los parámetros característicos de las rocas, que se determina con losmétodos sísmicos son la velocidad de las ondas P y S, el coeficiente dereflexión, la densidad. Propiedades de las rocas, que influyen estos parámetrosson:
• Petrografía, contenido en minerales.• Estado de compacidad.• Porosidad: porcentaje o proporción de espacio vacío (poros) en una
roca.• Relleno del espacio vacío, es decir, de los poros.• Textura y estructura de la roca.• Temperatura.• Presión.
Una variación en una de estas propiedades de la roca puede serrelacionada por ejemplo con un límite entre dos estratos litológicos, con unafalla o una zona de fallas, con un cambio en el relleno del espacio poroso de laroca.
Las velocidades de las ondas en diferentes medios: Durante el cambio de un medioal otro las ondas sísmicas tienen que cambiar su velocidad. Esto significa, a su vez,que van a separarse en una onda reflejada y en otra refractada.
Distribución mundial de las placas tectónicas. Las placas sudamericana y africanase separan entres sí 5 cm cada año, mientras que las placas de Nazca ysudamericana se acercan 9 cm al año
Los sismos, paradójicamente, poseen un aspecto positivo y éste es el deproporcionarnos información sobre el interior de nuestro planeta. Actualmente,gracias a la técnica conocida como tomografía sismológica, se conoce congran detalle el interior de nuestro planeta..
2.3.4 Actividad sísmica en Chile
Precisamente, gracias a los grandes sismos, fue que se iniciaron en Chilelas normas de construcción. Después del terremoto de Chillán, en 1939, nació laordenanza general. En 1960 (después de Valdivia y Concepción), se inició elestudio de normas sobre el cálculo sísmico de estructuras de edificios, paraconcluir en la Norma Chilena de Diseño Sísmico de Edificios, revisada por últimavez en 1996.
Hasta principios de la década de los 80, existía la figura del revisormunicipal, un Ingeniero Civil que fiscalizaba plano por plano los proyectos deedificación. Tras el boom de la construcción, entre los años 80 y 82, el procesode revisión comenzó a tornarse cada vez más lento y burocrático. Losingenieros revisores de cada municipio no dieron abasto, lo que sumado alconcepto de libre mercado imperante en la época determinó la eliminación deesta figura.
La actual versión de la Norma Chilena de Diseño Sísmico de Edificios NCh433 está orientada a lograr estructuras que resistan sin daños movimientossísmicos de intensidad moderada, limiten los daños en elementos noestructurales durante sismos de mediana intensidad y, aunque presenten daños,eviten el colapso durante sismos de intensidad severa. Establece requisitosmínimos para el diseño sísmico de edificios de acuerdo al área en que seránconstruidos y al uso que se dará a la estructura.
• Zonificación sísmica: Antes de esta norma, era lo mismo construir encualquier parte de Chile. Ahora, la zona costera, con suelos más blandos yriesgosos, obliga a una mayor rigidez en sus cimientos. Esta área incluyetoda la costa, desde el Norte Grande hasta Puerto Montt. Para la zonacentral, basta una rigidez intermedia y contempla hasta la isla de Chiloé.
Para la zona cordillerana (desde el altiplano hasta Tierra del Fuego), consuelos de roca firme, una menor rigidez. Según esta clasificación y los períodos de retorno respectivos se distinguen en Chile:
• Zona sísmica Norte: Ocurre un sismo “mayor” cada 143 años.
• Zona sísmica Central: Período de retorno de dichos sismos es de 86años.
• Zona sísmica Sur: Período de retorno de 130 años.
2.4 Clasificación de edificios y estructuras
En caso de catástrofe, los edificios que puedan albergar gran cantidad depersonas deben resistir con un fin de preservar y proteger la mayor cantidad devidas. En virtud de esto, establece una clasificación de los edificios y susprioridades en la calidad de su construcción:
• Categoría A: Edificios gubernamentales, municipales, de servicio outilidad pública (cuartel de policía, central eléctrica, telefónicas, correo,canales de televisión, radios, hospitales).
• Categoría B: Edificios cuyo contenido es de gran valor cultural(bibliotecas, museos) y aquellos donde existe frecuente aglomeración depersonas (salas, asambleas, estadios, escuelas, universidades, cárceles,locales comerciales).
• Categoría C: Edificios destinados a la habitación privada o uso públicoque no pertenezcan a las categorías A o B y construcciones de cualquiertipo cuya falla pueda poner en peligro las construcciones de categoría A oB.
• Categoría D: Construcciones aisladas o provisionales no destinadas ahabitación, no clasificables.
Ranking resistente
El material no indica el nivel de seguridad, todo está en la calidad delproyecto y en el uso adecuado que se le dé a los materiales. Aun así, cadamaterial ofrece sus propias características:
• Madera: Su elasticidad y peso la convierten en un excelente materialasísmico.
• Adobe: Es un mal material para construcciones sísmicas. Obliga a tenerextremo cuidado con el deterioro que el tiempo y la humedad le producen.Además, el costo rentable de hacer una construcción de adobe es máselevado que cualquier otro material.
• Hormigón Armado: Excelente material sismo-resistente. Buencomportamiento sísmico a la compresión y mal comportamiento sísmico ala tracción (ambos movimientos se producen durante un terremoto).Colapsa muy rápidamente cuando la intensidad del movimiento telúricosupera los 8 grados.
Costanera de Valdivia después de terremoto 5. Después que se produce unterremoto grande, es posible esperar que ocurran muchos sismos de menortamaño, en la vecindad del hipocentro del sismo principal.
A estos pequeños temblores se les denomina réplicas. Algunas series deréplicas duran largo tiempo, incluso superan el lapso correspondiente a un año(para los eventos de Alaska 1964, Chile 1960). La zona que cubre los epicentrosde las réplicas se llama “área de réplicas” y sus dimensiones, principalmente delas réplicas tempranas (uno a tres días de ocurrido el evento), son unaindicación del tamaño de la falla asociada con el terremoto principal.
El Peor de la historia
Si bien es cierto que no sólo Valdivia fue afectada por el famoso terremotode 1960, es la ciudad donde se registró aquella tristemente célebre intensidadrecord de XI a XII en Escala de Mercalli y 9,5 en Escala Richter. Simplemente elmayor movimiento telúrico jamás registrado.
El terremoto ocurrió el 22 de mayo de 1960 a las 15,11 horas (19,11 GMT) yfue percibido en todo el cono sur de América. El epicentro se localizó a 39,5° deLatitud Sur y a 74,5° de Longitud Oeste. El hipocentro se ubicó a 60 [km] deprofundidad. 2.000 personas murieron (4.000 a 5.000 en toda la región), 3.000resultaron heridas. 2.000.000 perdieron su hogar.
Los ríos cambiaron su curso. Nuevos lagos nacieron. Las montañas semovieron. La geografía, como nunca se había visto, se modificómarcadamente.
En los minutos posteriores un tsunami arrasó lo poco que quedaba en pie.El mar se recogió por algunos minutos y luego una gran ola se levantódestruyendo a su paso casas, animales, puentes, botes y, por supuesto,muchas vidas humanas.
Algunas naves fueron a quedar a kilómetros del mar, río arriba.
Estrictamente hablando, en Chile hubo 9 terremotos entre el 21 de Mayo y el6 de Junio de 1960.
* Se refiere a la Escala Richter Standard (Ms), reportada entonces por laUniversidad de Georgetown y el Boston College de EE.UU. , y los observatoriosVilla Ortúzar de Buenos Aires e Instituto Geofísico Los Andes de Bogotá.Actualmente se usa una modificación que considera la geometría de la falla y elmomento sísmico (Mw), que le asigna al Terremoto de Valdivia un valor de 9.6
3. Contaminación
3.1 Un ser enfermo: ¿Cómo cuidar la T ierra?
La Tierra es el único planeta del Sistema Solar y de otros sistemas que elser humano ha investigado donde se desarrolla vida como la conocemos.Científicos plantean que esto es posible gracias a un delicado y precisoequilibrio entre los diferentes constituyentes de nuestro planeta. Probablementesi alguna de las condiciones cambiara, la vida no se desarrollaría como hastaahora o sencillamente no existiría, por ejemplo, si la Tierra estuviera más cercadel Sol, o más lejos, si hubiera menos agua o si no existiera la capa de ozono.
3.2 Identificando el virus
El acelerado proceso de industrialización de la especie humana, los últimos150 años ha alcanzado una velocidad nunca antes vista en la historia delhombre, sin embargo, el precio a pagar por ello puede ser radical para laspróximas generaciones, esto es: “para los nietos de nuestros nietos”. Ladestrucción de la capa de ozono, el efecto invernadero, la disponibilidad deagua, son algunas de las grandes preocupaciones del “nuevo siglo”. Más de 200millones de personas no tienen acceso al agua potable y limpia, y la cantidad degente que no dispone de una conexión adecuada al alcantarillado es dos vecesmayor, o sea, 2400 millones de personas (2.400.000.000). La OrganizaciónMundial de la Salud (O.M.S.) estima que el 80% de todas las enfermedades, yaproximadamente 25 millones de las muertes de personas de salud compatibleen países en desarrollo se deben al consumo de aguas contaminadas.
En la actualidad, 26 estados sufren de una grave sequía. La organizaciónpara la Agricultura y la Alimentación (F.A.O.), parte de la base de que en el año2050 un mínimo de 70 estados padecerán de una grave escasez de agua y, porlo tanto, que las grandes guerras del siglo XXI serán por causa de esteelemento vital.
La contaminación del aire producida principalmente en ciudadesdensamente pobladas y/o con un alto nivel industrial afecta directamente a sushabitantes e indirectamente a todo el planeta. Además, la acumulación dealguno de estos contaminantes, o de sus derivados, está produciendo en laatmósfera un efecto global, denominado Efecto Invernadero, responsable delcalentamiento progresivo del planeta y provocando una alteración considerableen las condiciones climáticas a nivel mundial, que podría ser perjudicial paratodos los seres vivos. El auto es sinónimo de libertad individual, pero a menudolimita la movilidad que sus usuarios esperan de él. En vez de correr raudos porlas carreteras, permanecen horas inmovilizados diariamente en algún taco, yasea en Roma, Santiago, Nueva York o Madrid.
En todo el mundo circulan 737 millones de autos (737.000.000). El 70% enNorteamérica, Europa Occidental y Japón. En Latinoamérica, Asia y EuropaOriental, hay 162 millones de automóviles (162.000.000). EE.UU. y Alemaniapresentan la más alta densidad vehicular del mundo: un auto por cada doshabitantes. Se estima que la cantidad de autos aumentará a 1600 millones(1.600.000.000) en las próximas tres décadas y producirán tanto dióxido decarbono como para hacer toser a la mitad de la población mundial. Otro efectoimportante producido en la atmósfera corresponde al adelgazamiento de la capade ozono en la zona austral, debido al uso indiscriminado durante décadas delos C.F.C (cloro-fluoro-carbonos), en sistemas de refrigeración y aerosoles. ELozono forma una capa en la atmósfera que filtra la radiación ultra violetaprocedente del Sol, la cual es nociva para los seres vivos, aumentandoexponencialmente los diagnósticos de cáncer a la piel en la región.
Los procesos industriales eliminan numerosos desechos, generalmentetóxicos. Como una forma de eliminar estos desechos, muchas industrias lodepositan en cursos de agua y luego llegan al mar. Esta contaminación delagua en dichos sectores afecta tanto a los seres vivos que habitan allí y a lasespecies que se alimentan de ellos como las mismas personas. Lo peor de todoes que estos desechos son descargados, ya sea clandestinamente al curso deaguas o legalmente por falta de una normativa adecuada; por tanto, nadie sabebien si el marisco o pescado que está comiendo o que comeremos mañanarealmente esté libre de estos contaminantes y lo que es peor es que mucho deellos son acumulables. Esto significa que las secuelas no las vemos sino amediano o largo plazo, tan largo plazo como en nuestros hijos, pues hayelementos contaminantes que son transgénicos, es decir, se acumulan en elcuerpo de los seres vivos y alteran el ADN de las crías y de sus generacionesposteriores, incluso de la humana. Ésta es la característica del tristementecélebre DDT utilizando como plaguicida y, que aún hoy, pese ha estar prohibidoes usado clandestinamente por algunos agricultores en ciertas zonas denuestro país
El suelo también es otro elemento destruido en pos del Desarrollo debido ala explotación forestal y agrícola indiscriminada, la acumulación de desechosdomésticos e industriales y de aguas servidas.
La contaminación y la destrucción del suelo afectan a los seres vivos quese desarrollan con él, perjudicando a la vez la producción de alimentosesenciales. Por todo esto es difícil pensar que el precio que pagaremos comoespecie por este “desarrollo” no vaya a ser altísimo.
3.3 Lluvia ácida
La lluvia ácida es un fenómeno que se produce por la combinación de losóxidos de nitrógeno y azufre provenientes de las actividades humanas, con elvapor de agua presente en la atmósfera, los cuales se precipitan posteriormentea tierra acidificando los suelos, pero que pueden ser arrastrados a grandesdistancias de su lugar de origen antes de depositarse en forma de lluvia.
La lluvia ácida no es un fenómeno reciente, tiene sus antecedentes en laRevolución Industrial, y desde entonces ha ido en aumento. El término lluviaácida tiene su origen en unos estudios atmosféricos realizados en Inglaterra enel siglo XIX, pero actualmente cabría denominarla deposición ácida, ya quepuede presentarse en forma líquida (agua), sólida (nieve), o incluso comoniebla, esta última tan efectiva en su capacidad de destrucción como lo es ladeposición líquida.
Estos gases son producidos, principalmente, por la combustión decarburantes fósiles en las actividades industriales, tales como centralestérmicas dedicadas a la obtención de energía eléctrica.
Las industrias que generan los contaminantes atmosféricos suelen disponerde altas chimeneas, para evitar que las partículas en suspensión se deponganen las inmediaciones de las propias instalaciones.
A su vez, los humos son inyectados en la alta atmósfera, permitiendo serarrastrados a cientos de kilómetros de su punto de origen por las corrientes deconvección. Una vez que las partículas contaminantes han reaccionado con elvapor de agua, vienen a depositarse en el suelo en forma de lluvia ácida.
Este hecho en particular y la contaminación de la atmósfera en general,hace más evidente su aspecto global, pues trasciende las fronteras de lospaíses y obliga a entendimientos difíciles, que en muchas ocasiones se venentorpecidos por motivaciones políticas de carácter económico o deexpectativas de desarrollo de los diferentes países.
Cuando la lluvia ácida se precipita a tierra es transportada hacia los lagospor las aguas superficiales, acidificando los suelos y fijando elementos como elcalcio y magnesio, que los vegetales necesitan para desarrollarse.
Además de a los seres vivos, la lluvia ácida afecta también a lasconstrucciones y materiales. Es común observar monumentos, edificios oconstrucciones de piedra, alterados por los ácidos que contienen estoscontaminantes, los cuales reaccionan con sus componentes graníticos ocalcáreos, demoliéndolos o debilitándolos, convirtiendo este fenómeno en unaverdadera amenaza para ciertas edificaciones.
El efecto sobre los organismos vivos y las construcciones...
Muchas plantas y peces han desaparecido por efecto de la acidez a la quese ha sometido el entorno en que vivían, los cuales se encontraban adaptadosa ciertos límites que se vieron superados.
En el norte de Europa, por ejemplo, la lluvia ácida ha dañado extensasáreas de bosques y cosechas y diezmado la vida de los lagos de agua dulce. Essintomático ver un lago totalmente trasparente y limpio, lo cual puede sersinónimo de que ausencia de vida. Si la tuvo probablemente la haya sido conanterioridad al fenómeno de la lluvia ácida.
3.4 ¿Existe remedio para esta enfermedad?
Numerosas organizaciones gubernamentales y no gubernamentalesalrededor del mundo tratan de poner en práctica novedosos pero discretosmétodos que sólo sirven de calmantes para una enfermedad grave. Lasalteraciones producidas por el medioambiente en la corta edad del hombre(menos de una millonésima parte del último segundo de las 24 horas que havivido hasta hoy la Tierra) hacen pensar en la especie humana como un “virus”propagándose en el ser vivo que lo contiene, consumiéndolo completamentepara responder a su único fin: reproducirse para expandirse. Desgraciada oafortunadamente aún no podemos vivir como especie en otro planeta de laforma en que hemos vivido hasta ahora en la Tierra.
Sólo un cambio de actitud en la especie, pero antes en nosotros podríarevertir el mal para encontrar un antídoto al peor enemigo de nuestro planeta entoda su historia: la especie humana.
1. Composición de la Tierra: Geósfera, Hidrosfera y Atmósfera.
2. Estructura de la Tierra: Corteza, manto y núcleo.
3. Escala de Richter: Representa la energía liberada en cada sismo y sebasa en el registro sismográfico.
4. Escala de Mercalli: Representa la intensidad de un sismo y se relacionacon los efectos y daños producidos en un lugar determinado.
CAPÍTULO 9: LA VÍA LÁCTEA Y EL SISTEMA SOLAR
Aprendizajes esperados:
• Al completar la unidad, alumnos y alumnas podrán:• Comprender el origen del universo.• Reconocer tipos de galaxias.• Reconocer la estructura y forma de la Vía Láctea.• Comprender las distancias astronómicas.• Ubicar nuestro Sol y nuestro planeta en la Vía Láctea.• Reconocer la evolución histórica de los modelos del sistema solar.• Reconocer los movimientos de la Tierra.• Conocer los principales astros del sistema solar, sus dimensiones,
características y distancias medias al Sol.• Conocer los aspectos generales respecto a la Luna, su relación con las
mareas y los eclipses.
El estudio del universo, su origen y sus astros ha sido una inquietud permanentepara el ser humano desde tiempos remotos. Culturas tan antiguas como la mayaconstruyeron observatorios astronómicos, cuyas estructuras perduran hastahoy, como el de Chichén Itzá, ubicado en México.
Desde la Antigüedad, las estrellas visibles comenzaron a ser asociadas yse les dio el nombre de diversas constelaciones de acuerdo con la mitología decada cultura. Las de Casiopeia, Cefeo, Andrómeda, Pegaso, Perseo y laBallena, por ejemplo, se relacionan con el mito del salvamento de Andrómedapor parte de Perseo.
En el siglo XX, se quiso fijar el número de constelaciones, sus nombres ysus límites. Así en 1930, la Unión Astronómica Internacional fijó las 88constelaciones que hoy se pueden observar en los atlas astronómicos.
Una de las constelaciones más conocidas y visibles a simple vista en elcielo nocturno de nuestro hemisferio es la de Orión, que representa en la
mitología antigua a un temido cazador que perseguía a Aldebarán, el toro delcielo y llevaba siempre acompañándole a sus dos perros: el Can Mayor y el CanMenor. Se decía que Orión siempre estaba presumiendo de su valor y, alparecer, tenía fama de poder vencer a cualquier fiera. Por ello, el dios Júpiterenvió para matarlo al Escorpión. Sin darse cuenta, lo colocó en el cielo en ellado opuesto a donde se encontraba Orión y por ello se dice que cuando Oriónaparece por el cielo del este, el Escorpión desaparece por el cielo del oeste yasí sin terminar jamás; termina la leyenda diciendo que la persecución es eternae implacable.
1. El origen del universo
El Big Bang, literalmente gran estallido, constituye el momento en que de la“nada” emerge toda la materia, es decir, el origen del universo. La materia,hasta ese momento, es un punto de densidad infinita, que en un momento dado“explota” generando la expansión de la materia en todas las direcciones ycreando lo que conocemos como nuestro universo.
Inmediatamente después del momento de la “explosión”, cada partícula demateria comenzó a alejarse muy rápidamente una de otra, de la misma maneraque al inflar un globo éste va ocupando más espacio expandiendo su superficie.Los físicos teóricos han logrado reconstruir esta cronología de los hechos apartir de un 1/100 de segundo después del Big Bang. La materia lanzada entodas las direcciones por la explosión primordial está constituidaexclusivamente por partículas elementales: electrones, positrones, mesones,bariones, neutrinos, fotones y un largo etcétera hasta más de 89 partículasconocidas hoy en día.
En 1948 el físico ruso nacionalizado estadounidense George Gamowmodificó la teoría de Lemaître del núcleo primordial. Gamow planteó que eluniverso se creó en una explosión gigantesca y que los diversos elementos quehoy se observan se produjeron durante los primeros minutos después de la GranExplosión o Big Bang, cuando la temperatura extremadamente alta y la densidaddel Universo fusionaron partículas subatómicas en los elementos químicos.Cálculos más recientes indican que el hidrógeno y el helio habrían sido losproductos primarios del Big Bang, y los elementos más pesados se produjeronmás tarde, dentro de las estrellas. Sin embargo, la teoría de Gamowproporciona una base para la comprensión de los primeros estadios del universoy su posterior evolución. A causa de su elevadísima densidad, la materiaexistente en los primeros momentos del universo se expandió con rapidez. Alexpandirse, el helio y el hidrógeno se enfriaron y se condensaron en estrellas yen galaxias. Esto explica la expansión del universo y la base física de la ley deHubble.
Los antiguos Griegos vieron la figura del gran mito Griego Orión en el cielo de lanoche.
Según se expandía el universo, la radiación residual del Big Bang continuóenfriándose, hasta llegar a una temperatura de unos 3K (-270°C). Estosvestigios de radiación de fondo de microondas fueron detectados por losradioastrónomos en 1965, proporcionando así lo que la mayoría de losastrónomos consideran la confirmación de la teoría del Big Bang.
Uno de los problemas sin resolver en el modelo del universo en expansión essi el universo es abierto o cerrado (esto es, si se expandirá indefinidamente o sevolverá a contraer).
Un intento de resolver este problema es determinar si la densidad media dela materia en el universo es mayor que el valor crítico en el modelo deFriedmann. La masa de una galaxia se puede medir observando el movimientode sus estrellas; multiplicando la masa de cada galaxia por el número degalaxias se ve que la densidad es sólo del 5 al 10% del valor crítico. La masa deun cúmulo de galaxias se puede determinar de forma análoga, midiendo elmovimiento de las galaxias que contiene. Al multiplicar esta masa por el númerode cúmulos de galaxias se obtiene una densidad mucho mayor, que se aproximaal límite crítico que indicaría que el universo está cerrado. La diferencia entreestos dos métodos sugiere la presencia de materia invisible, la llamada materiaoscura, dentro de cada cúmulo pero fuera de las galaxias visibles. Hasta que secomprenda el fenómeno de la masa oculta, este método de determinar el destinodel universo será poco convincente.
Muchos de los trabajos habituales en cosmología teórica se centran endesarrollar una mejor comprensión de los procesos que deben haber dado lugaral Big Bang. La teoría inflacionaria, formulada en la década de 1980, resuelvedificultades importantes en el planteamiento original de Gamow al incorporaravances recientes en la física de las partículas elementales. Estas teoríastambién han conducido a especulaciones tan osadas como la posibilidad de unainfinidad de universos producidos de acuerdo con el modelo inflacionario. Sinembargo, la mayoría de los cosmólogos se preocupa más de localizar elparadero de la materia oscura, mientras que una minoría, encabezada por elsueco Hannes Alfvén, premio Nobel de Física, mantienen la idea de que no sólola gravedad sino también los fenómenos del plasma, tienen la clave paracomprender la estructura y la evolución del universo.
(http://www.xtec.es/~rmolins1/textos/es/univers01.htm)
En 1924, Edwin Hubble determinó que la velocidad de alejamiento de las galaxiasrespecto de la nuestra es directamente proporcional a la distancia que las separade la nuestra: mientras más lejos se encuentre una galaxia, se aleja a mayorvelocidad. Esta ley, que es una consecuencia de la teoría de la relatividad general,es considerada una prueba de la existencia del Big Bang.
Albert Einstein, científico que obtuvo el doctorado en Física en 1905. Obtuvo elPremio Nobel de Física en 1921 por su trabajo sobre el efecto fotoeléctrico. En1915 publicó un artículo sobre la teoría de la relatividad general, presentando unnuevo concepto de la gravitación, que incluía como caso particular la teoría de SirIsaac Newton.
La velocidad de la luz es de 300.000 [km/s]. A esta velocidad:
Se le da la vuelta entera a la Tierra en 0,02 [s].
Se viaja a la Luna en 1,3 [s].
Se llega al Sol en 8,3 [min].
Se llega a la estrella más cercana en 4,2 [años]
En un año la luz recorre 9,46 millones de millones de kilómetros (9,46 x 1012 Km).
A esta distancia se le llama el año luz y es muy útil para expresar las distanciasentre cuerpos estelares.
Otra unidad de distancias usada en astronomía es el PARSEC: 1 Parsec = 3,26años-luz
Unidad astronómica (ua): Distancia media entre la Tierra y el Sol. Aprox.,149.600.000 Km. No se utiliza fuera del Sistema Solar.
2. Las estrellas
A simple vista se pueden observar miles de estrellas en el cielo. Si se usaprismáticos, ese número aumenta y con un telescopio aumenta aún más Unaestrella es una enorme esfera de gas a una muy alta temperatura y presión, quese mantiene cohesionada gracias a la gravedad y en perfecto equilibrio. Lasreacciones en el núcleo estelar generan una presión hacia fuera que evita que laestrella colapse y se hunda bajo su propio peso.
Todas las estrellas nacen por la contracción de una nube de gas y polvointerestelar.
Estas nubes, ricas en hidrógeno (H), hidrógeno molecular (H2) y en menorcantidad deuterio (D2) y helio (He) junto a otros elementos, llegan a medir 200años luz de diámetro.
El interior de estas nubes no puede conocerse mediante instrumentosópticos, pero sí con radiotelescopios. Gracias a ellos se sabe que constan conzonas de diferentes densidades cuyas temperaturas no son inferiores a 10 °K.Estas zonas más densas o núcleos son los que darán origen a las futurasestrellas, luego de sufrir un colapso gravitacional.
Las estrellas nacen cuando se acumula una gran cantidad de materia en unlugar del espacio. Se comprime y se calienta hasta que empieza una reacciónnuclear, que consume la materia, convirtiéndola en energía. Las estrellaspequeñas la gastan lentamente y duran más que las grandes.
Las estrellas se clasifican
Según su tamaño en:
• Súper gigantes• Gigantes• Medianas• Pequeñas• Enanas
Según su temperatura (de más caliente a más frío) en:
• Azules• Amarillas• Blancas• Rojas
2.1 El Sol
Hace 4.5 billones de años se formaron el Sol y los planetas de una nube degas interestelar. Esta nube de gas gradualmente se condensó para formar una“protoestrella,” una esfera de gas que resulta más y más caliente a causa de la
gravedad que la condensa, hasta que alcanza 10 millones de gradoscentígrados. Este calor intenso produce reacciones nucleares y causa que elSol brille. Hay bastante hidrógeno en el núcleo del Sol para darle brillo por unos5 billones de años adicionales.
Es una esfera gigante de gas, consistiendo principalmente de hidrógeno yhelio, los dos elementos químicos más sencillos y más livianos. Estos gasesson tan calientes que hacen que el Sol brille. Este brillo no es como un fuegoque arde, sino que es una reacción de estos gases al calor y a la presión del Solque hacen que los átomos se “fusionen.” Esta fusión produce energía nuclear.
Fuente: www.achetudoeregiao.com.br/Astronomia/Astrogif/sol.GIF
Las capas del Sol
El Sol consta de una serie de capas. Se denominan como sigue desde elexterior hacia el interior:
• La corona: La atmósfera externa del Sol. El gas es muy caliente y sedispersa en una capa muy fina, por lo cual, únicamente vemos la Coronadurante un eclipse de Sol total, cuando la Luna oculta el perímetro del Solcompletamente.
• La cromosfera: Esta capa bordea la superficie del Sol. Frecuentementeinmensas llamaradas de gases candentes se lanzan a través de lacromosfera, extendiéndose más de 10 millones de millas más allá de lasuperficie del Sol. Estas llamaradas dispersan partículas eléctricas quepueden afectar las señales transmitidas por la radio y la televisión y puedenproducir manifestaciones coloridas que se conocen como la aurora boreal ola aurora austral.
• La fotosfera: La superficie visible del Sol. Aunque todavía hace muchocalor (cerca de 10,000 grados Fahrenheit) en la fotosfera, no es tanardiente en comparación a las capas interiores del Sol. De vez en cuando,manchas obscuras y frías con campos magnéticos intensos llamadasmanchas solares, aparecen sobre la fotosfera. La gran parte de estastempestades magnéticas gigantes son mayor en tamaño que nuestra Tierra.El número de manchas solares aumenta y disminuye cada 11 años, aunquelos astrónomos no están seguros de por qué esto sucede.
• La zona convectiva: El proceso de convección (el mismo proceso quecausa que hierva una olla de caldo) transporta energía de la zonaradiactiva del Sol hacia la fotosfera. Imágenes detalladas de la fotosferamuestran burbujas grandes de gas caliente elevándose desde lo másprofundo del Sol.
• La Zona Radiactiva: El transporte de energía del núcleo “radía” hacia elexterior y se realiza a través de esta capa de gases de hidrógeno y de heliohacia la zona convectiva.
• El núcleo: El hidrógeno dentro del núcleo está tan compactamentecompreso que los átomos individuales chocan entre sí, formando átomosde helio más pesados y liberando grandes cantidades de energía en elproceso. Sin embargo, esta energía toma miles de años en llegar de lafotosfera hacia el espacio.
3. Las galaxias
Una galaxia es un grupo de estrellas, gases y polvo estelar, que semantiene unido por efecto de la gravedad.
Cada cuerpo de una galaxia se mueve a causa de la atracción de los otros.En general hay, además, un movimiento más amplio que hace que todo junto girealrededor del centro.
Las primeras galaxias se empezaron a formar 1.000 millones de añosdespués del Big-Bang. Las estrellas que las forman tienen un nacimiento, unavida y una muerte. El Sol, por ejemplo, es una estrella formada por elementos deestrellas anteriores muertas.
Muchos núcleos de galaxias emiten una fuerte radiación, cosa que indica laprobable presencia de un agujero negro.
Los movimientos de las galaxias provocan, a veces, choques violentos.Pero, en general, las galaxias se alejan las unas de las otras, como puntosdibujados sobre la superficie de un globo que se infla.
La galaxia grande más cercana es Andrómeda. Se puede observar a simplevista y parece una mancha luminosa de aspecto brumoso. Los astrónomosárabes ya la habían observado. Actualmente se la conoce con la denominaciónM31. Está a unos 2.200.000 años luz de nosotros. Es el doble de grande que laVía Láctea.
El esquema más extendido hoy en día para clasificar las galaxias tuvo suorigen en 1926, cuando Edwin Hubble ordenó las galaxias en tres categoríasprincipales: elípticas, espirales e irregulares. Más tarde se añadieron dos tiposmás: barradas y lenticulares.
Las galaxias elípticas son las más antiguas, tienen una estructura muyregular, están conformadas por una gran cantidad de estrellas viejas, cuyostamaños varían desde gigantes a enanas, presentan poco gas y polvointerestelar y algunas estrellas nuevas en formación.
Las galaxias espirales son las más numerosas del universo, tienen forma de

discos achatados, están conformadas por pocas estrellas viejas y una granpoblación de estrellas jóvenes; además contienen mucho polvo estelar y gas, loque las hace tener zonas brillantes y oscuras.
Las galaxias irregulares son de tamaño muy inferior a las anteriores y noposeen forma definida, están constituidas por grandes cantidades de gas, polvoestelar, estrellas jóvenes y otras en formación.
En general, las galaxias no se encuentran solas, sino agrupadas encúmulos de galaxias.
Los tipos de galaxias
Galaxia elíptica
Galaxia espiral
Galaxia irregular
4. La Vía Láctea
La galaxia en que vivimos es la Vía Láctea, una galaxia de tipo espiralconstituida por unas doscientas mil millones de estrellas, cuyo origen se haestablecido hace unos diez mil millones de años.
Todos los cuerpos celestes que se ven a simple vista en la nochepertenecen a nuestra galaxia, excepto tres.
Los tres objetos visibles a simple vista, que están fuera de nuestra galaxiason la Gran y Pequeña Nube de Magallanes, descubiertas por Hernando deMagallanes y corresponden a un par de aparentes nubosidades visibles solo enel cielo del hemisferio sur; estas nubosidades son en realidad miles de millonesde estrellas. La Gran Nube está a 170.000 años luz de distancia y la Pequeña a190.000 años luz. El tercer objeto es la galaxia de Andrómeda, visible solo en elhemisferio norte. La luz procedente de Andrómeda demora mas de dos millonesde años en llegar a la Tierra.
Estos tres objetos pertenecen al Grupo Local, que es un agrupamiento demás de 30 galaxias, que incluye la nuestra.
En total el Grupo Local ocupa un área de unos 4 millones de años luz dediámetro.
La Vía Láctea tiene un diámetro de 100.000 años luz, un espesor de 6.500años luz y gira en torno a un centro con una velocidad de 1 revolución cada 300millones de años.
En torno al centro de la Vía Láctea se encuentran alrededor de 300agrupaciones de estrellas, cada una de ellas compuesta por 100.000 a 1 millónde estrellas. Cada una de estas agrupaciones recibe el nombre de Cúmuloglobular.El Sistema Solar está en uno de los brazos de la espiral, llamadoBrazo de Orión, a unos 30.000 años luz del centro y unos 20.000 del extremo.
En general, las estrellas en la galaxia giran en torno al centro galáctico conuna velocidad que depende de su distancia al centro. Para el caso del Sol, éstaes de 250 kilómetros por segundo. Lo cual significa que durante los 10 milmillones de años de edad de la galaxia, el Sol, ya ha completado más de 30vueltas alrededor del centro de la Galaxia. La rotación de la galaxia y su formaespiral se pudo determinar observando el corrimiento por efecto Doppler en laslíneas del espectro de emisión del hidrógeno neutro (línea de longitud de ondade 21 cm). Esta radiación característica es producida cuando el electrón en elestado base de energía del átomo de hidrógeno sufre una transición en la cualsu spin cambia de alineación con respecto al spin del protón en el núcleo.
La observación de la galaxia ha sido posible gracias al ingeniero radiofónicoKarl Jansky, quien en 1932 investigando la estática que interfería lascomunicaciones por radio de onda corta, descubrió que existía una fuentepoderosa de ondas de radio, situada en las estrellas y en la dirección de laconstelación de sagitario. Así nació la radioastronomía, que utiliza grandesantenas, llamadas radiotelescopios y captan señales de radio en lugar deondas de luz, lo que permite observar las zonas de Vía Láctea que no sonvisibles mediante telescopios, los cuales son cegados por el polvo cósmico.
Fotografía de la Vía Láctea que muestra la posicióndel Sistema Solar.
5. El sistema solar
Nuestro lugar en el universo es un pequeño planeta que gira alrededor deuna estrella mediana, ubicada en el brazo de una enorme galaxia, una más delas incontables que se encuentran dispersas en el universo. Desde nuestromundo natal (el único lugar donde podemos asegurar que existe vida), miramosel espacio y contemplamos las maravillas del cosmos. Cerca de la Tierra seencuentran los planetas y demás cuerpos del sistema solar, orbitando nuestrofecundo y familiar Sol; mucho más lejos se distinguen las otras estrellas denuestra galaxia, algunas brillantes y calientes, otras diminutas y pálidas.Podemos observar nubes de gases de donde surgen las estrellas y percibirextraños fenómenos que indican el enigmático vacío que han dejado lasestrellas muertas en violentos cataclismos; también vemos lagunas lácteas queseñalan la posición de otras galaxias y, forzando hasta sus límites losinstrumentos astronómicos, los científicos investigan los misteriosfundamentales: cómo pudo haberse iniciado el universo y cuál podría ser su fin.
5.1. Desarrollo histórico del conocimiento del sistema solar
Los filósofos griegos postulan a la Tierra como un globo inmóvil alrededordel cual giran los ligeros objetos celestes.
Esta teoría, conocida como sistema geocéntrico, permaneció inalteradaunos 2.000 años. Sus bases eran:
• Los planetas, el Sol, la Luna y las estrellas se mueven en órbitascirculares perfectas.• La velocidad de los planetas, el Sol, la Luna y las estrellas sonperfectamente uniformes.• La Tierra se encuentra en el centro exacto del movimiento de los cuerposcelestes.
Bajo estos principios, Eudoxo (408 - 355 A.C) fue el primero en concebir eluniverso como un conjunto de 27 esferas concéntricas que rodean la tierra, lacual a su vez también era una esfera. Platón y uno de sus mas adelantadosalumnos Aristóteles (384 - 322 A.C.) mantuvieron el sistema ideado por Eudoxoagregándole no menos de cincuenta y cinco esferas en cuyo centro seencontraba la Tierra inmóvil.
En el Renacimiento, el aporte de Nicolás Copérnico hizo un cambio radical yun nuevo impulso para una ciencia que estaba dormida. Copernico analizócríticamente la teoría de un universo geocéntrico y demostró que losmovimientos planetarios se pueden explicar mejor atribuyendo una posicióncentral al Sol, más que a la Tierra.
En principio no se prestó mucha atención al sistema de Copérnico(heliocéntrico) hasta que Galileo descubrió pruebas sobre el movimiento de laTierra cuando se inventó el telescopio en Holanda. En 1609 construyó unpequeño telescopio de refracción, lo dirigió hacia el cielo y descubrió las fasesde Venus, lo que indicaba que este planeta gira alrededor del Sol. Tambiéndescubrió cuatro lunas girando alrededor de Júpiter.

Convencido de que estos planetas no giraban alrededor de la Tierra,comenzó a defender el sistema de Copérnico, lo que lo llevó ante un tribunaleclesiástico. Aunque se le obligó a renegar de sus creencias y de sus escritos,esta teoría no pudo ser suprimida.
La antigua teoría griega de que los planetas giraban en círculos avelocidades fijas se mantuvo en el sistema de Copérnico.
El observador más importante del siglo XVI fue Tycho Brahe, quien tenía eldon de la observación y el dinero para construir los equipos más avanzados yprecisos de su época. Desde 1580 hasta 1597; Tycho observó el Sol, la Luna ylos planetas en su observatorio situado en una isla cercana a Copenhague ydespués en Alemania.
Sus observaciones, que eran las mas exactas disponibles, darían despuésde fallecido las herramientas para que se pudieran determinar las leyes delmovimiento celeste, dadas por su ayudante y uno de los mas grandescientíficos de la historia: Johannes Kepler.
Pero el hecho más trascendente del Renacimiento no fue estedescubrimiento, sino el cambio de actitud y mentalidad en los científicos. Laexperimentación empezó a hacerse filosóficamente respetable en Europa, y fueGalileo quien acabó con la teoría de los griegos y efectuó la revolución.
Galileo fue el primero en realizar experimentos cronometrados y en utilizar lamedición de una forma sistemática. Su revolución consistió en situar lainducción por encima de la deducción, como método lógico de la Ciencia.Galileo puede considerarse, por tanto, el padre de las ciencias modernas, yaque sus ideas se basaban en experimentos.
Ilustración del sistema heliocéntrico postulado por Copérnico
Johannes Kepler (1571 – 1630)
5.2. Características del sistema solar
Desde el Big-Bang, que se establece como el inicio del universo hantranscurrido aproximadamente 15.000 millones de años, sin embargo, laformación del sistema solar se estima en unos 4.500 millones de años.
El sistema solar está formado por una estrella central, el Sol, los cuerposque lo acompañan y el espacio que queda entre ellos.
Ocho planetas giran alrededor del Sol: Mercurio, Venus, la Tierra, Marte,Júpiter, Saturno, Urano y Neptuno.
Los asteroides son rocas más pequeñas que también giran, la mayoríaentre Marte y Júpiter. Además, están los cometas que se acercan y se alejanmucho del Sol. A veces llega a la Tierra un fragmento de materia extraterrestre.La mayoría se encienden y se desintegran cuando entran en la atmósfera. Sonlos meteoritos.
Casi todos los planetas orbitan alrededor del Sol en el mismo plano,llamado eclíptica.
El eje de rotación de los planetas es casi perpendicular al eclíptico. Laexcepción es Urano, el cual está inclinado hacia su lado.
El Sol contiene el 99,85% de toda la materia en el sistema solar. Losplanetas están condensados del mismo material del que está formado el Sol,contienen sólo el 0,135% de la masa del sistema solar. Júpiter contiene más dedos veces la materia de todos los otros planetas juntos.
Casi todo el sistema solar por volumen parece ser un espacio vacío quellamamos “medio interplanetario”, incluye varias formas de energía y contiene,sobre todo, polvo y gas interplanetario.
5.3. Los planetas y sus características
• Los planetas se formaron hace unos 4.500 millones de años, al mismotiempo que el Sol.• Los materiales ligeros que no se quedaron en el Sol se alejaron más quelos pesados. En la nube de gas y polvo original, que giraba en espirales,había zonas más densas, que más tarde formarían los planetas.• La gravedad y las colisiones llevaron más materia a estas zonas y elmovimiento rotatorio las redondeó.• Los planetas constituyentes del sistema solar son ocho, no tienen luzpropia, sino que reflejan la luz solar.
• Los principales movimientos de los planetas son:
• Rotación: Giran en torno a sí mismos respecto a un eje. Este movimientodetermina la duración del día del planeta.
• Traslación: Describen órbitas elípticas en torno al sol. Este movimientodetermina el año del planeta, cada planeta tarda un tiempo distinto encompletar una órbita.
1. Mercurio: Es el planeta más cercano al Sol y el segundo más pequeño delsistema solar. No posee atmósfera, su superficie está llena de cráteres ygrietas, en medio de marcas ocasionadas por el impacto de meteoritos. Lapresencia de campo magnético indica que tiene un núcleo metálico,parcialmente líquido. Su alta densidad, la misma que la Tierra, indica queeste núcleo ocupa casi la mitad del volumen del planeta. Su temperaturavaría entre los 430°C y - 180°C. Los polos se mantienen siempre muy fríos,lo que lleva a pensar que puede haber agua congelada. Los romanos lobautizaron con el nombre del mensajero de los dioses, porque se movíamás rápido que el resto de los planetas.
2. Venus: Es el segundo planeta del sistema solar y el más semejante a laTierra en cuanto a su tamaño, masa, densidad y volumen; pero no tieneocéanos, y su densa atmósfera provoca un efecto invernadero que eleva latemperatura hasta los 480°C. El sentido de giro de este planeta es contrarioal del resto del sistema solar. Su superficie está constituída en un 85% porroca volcánica y lava, debido a la gran cantidad de volcanes que posee,también se observan cráteres por impacto de grandes meteoritos, ya quelos pequeños se deshacen en su densa atmósfera.
3. Tierra: Es el tercer planeta y el único habitado, es el mayor de losplanetas rocosos. Posee un satélite natural llamado Luna. Tiene unaatmósfera que permite la vida en él y regula la temperatura, variando éstaentre -70°C y 50°C. Posee características magnéticas.
4. Marte: Es el cuarto planeta conocido como el planeta rojo por sus tonosrojizos, debido a la oxidación o corrosión. Los romanos lo identificaron conla sangre y le pusieron el nombre de su dios de la guerra. Posee unaatmósfera muy fina compuesta principalmente por dióxido de carbono, quese congela alternativamente en cada uno de sus polos. contiene un 0,03%de agua (mil veces menos que la Tierra). Las observaciones muestran en susuperficie surcos, islas y costas, lo que implica que tuvo una atmósferamás compacta, con nubes y precipitaciones que formaban ríos. Lasgrandes diferencias de temperatura (-120°C a 25°C) provocan fuertesvientos. La erosión del suelo forma tempestades de polvo y arena quedegradan todavía más la superficie. Posee dos satélites: Fobos y Deimos.
5. Júpiter: Es el planeta más grande, tiene más materia que todos los otrosplanetas juntos y su volumen es mil veces el de la Tierra. Tiene 16 satélitesy un tenue sistema de anillos (invisible desde la Tierra), formado porpartículas de polvo lanzadas al espacio cuando los meteoritos chocan consus lunas. Su composición es semejante a la del Sol, formada porhidrógreno, helio, amoniaco, metano, vapor de agua, principalmente. Surotación es la más rápida del Sistema Solar. Sus grandes manchas sondebidas a grandes tormentas en su atmósfera. Posee un enorme campomagnético. Tiene una temperatura media de -150°C.
6. Saturno: Es el segundo planeta más grande y el único con anillos visiblesdesde la Tierra. Dos de sus anillos son brillantes y uno opaco, entre elloshay aberturas, siendo la mayor la División de Cassini. Cada anillo principalestá formado por muchos anillos estrechos, su composición es dudosa,pero se sabe que contienen agua. La elaborada estructura de los anillos sedebe a la fuerza de gravedad de los satélites cercanos y a la fuerzacentrífuga que genera la propia rotación del planeta. Posee 33 satélitesnaturales. Su atmósfera es de hidrógeno, helio y metano. Es el únicoplaneta que tiene una densidad menor que el agua. Su temperaturapromedio es de - 180°C.
7. Urano: Es el séptimo planeta y el tercero más grande. Su atmósfera estaformada por hidrógeno, metano y otro hidrocarburos. El metano absorbe laluz roja, por eso refleja tonos azules y verdes. Está inclinado de forma talque el ecuador forma casi ángulo recto con la trayectoria de la órbita (98°)por lo tanto, en algunos momentos su parte más caliente es uno de suspolos, y su campo magnético se inclina 60° en relación -214°C a su eje y lacola tiene forma de tirabuzón (por la rotación). Posee 11 anillos formadospor grandes piedras y fino polvo; y 15 satélites naturales. Su temperaturapromedio es de
8. Neptuno: Es el planeta más exterior de los grandes gaseosos. Su interiores roca fundida con agua, metano y amoniaco, su exterior es hidrógeno,helio, vapor de agua y metano. Es un planeta con manchas (grandestormentas), los vientos son los más fuertes del sistema solar, soplandomuchos de ellos en sentido contrario a su rotación, se han medido vientosde 2.000 Km/h. Tiene un sistema formado por 4 anillos estrechos, muy tenues y difíciles dedistinguir desde la Tierra, están formados por partículas de polvo. Tiene 13satélites naturales. Su temperatura media es de -220°C.
5.3.1. Nuevos y viejos planetasEl 24 de agosto de 2006 y tras dos largos años de intenso trabajo, la Unión
Astronómica Internacional (IAU) en su XXVI° Asamblea General en Praga(Chequia) definió los conceptos de planeta, planeta enano y cuerpos pequeñosdel Sistema Solar y creó el término plutoniano. Toda esta labor se llevó a caboa raíz de los últimos descubrimientos de nuevos cuerpos en nuestro SistemaSolar.
La IAU clasifica en tres categorías los cuerpos celestes de nuestro SistemaSolar:
• Primera categoría: “Un planeta es un cuerpo celeste que está en órbitaalrededor del Sol, que tiene suficiente masa para tener gravedad propiapara superar las fuerzas rígidas de un cuerpo de manera que asuma unaforma equilibrada hidrostática, es decir, redonda, y que ha despejado lasinmediaciones de su órbita”.
• Segunda categoría: “Un planeta enano es un cuerpo celeste que está enórbita alrededor del Sol, que tiene suficiente masa para tener gravedadpropia para superar las fuerzas rígidas de un cuerpo de manera que asumauna forma equilibrada hidrostática, es decir, redonda; que no ha despejadolas inmediaciones de su órbita y que no es un satélite.”
• Tercera categoría: “Todos los demás objetos que orbitan alrededor delSol son considerados colectivamente como ‘cuerpos pequeños del SistemaSolar’”.
Los nuevos planetas enanos de nuestro Sistema Solar son Ceres, Plutón,Caronte y Eris.
La IAU define plutoniano como el objeto celeste que cumple los requisitosde un planeta enano y, de acuerdo con la definición establecida anteriormente,cuyo período orbital es superior a 200 años, es decir, que tarda más de dossiglos en dar una vuelta alrededor del Sol. Una característica importante de losplutonianos es que su órbita se aleja mucho de la circular, por lo tanto, tieneuna elevada excentricidad e inclinación sobre el plano de la eclíptica del SistemaSolar. En virtud de la misma definición, es posible añadir que el origen de losplutonianos es diferente al de los planetas clásicos de nuestro Sistema Solar.
El nombre de plutoniano lógicamente viene de Plutón, prototipo de este tipode planetas enanos, ya que fue el primero en descubrirse en 1930 y se trata deun planeta enano esférico. Hay que destacar que Plutón es un planeta enano y,además, es plutoniano; pero ya no es un planeta del Sistema Solar.
Los planetas plutonianos de nuestro Sistema Solar son Plutón, Caronte yEris.
5.4 Leyes que rigen el sistema solar
5.4.1 Leyes de Kepler
• La primera ley se refiere al tipo de orbita que describen los planetas delsistema solar y establece que “todos los planetas describen orbitaselipticas , con el Sol en uno de sus focos”.
• La segunda ley plantea que al considerar la posición del planeta paradiferentes intervalos de tiempo se cumple que la recta que une al planetacon el Sol (radio vector) describe área iguales en tiempos iguales (A1 = A2, siDT1 = DT2)
• La tercera ley permite establecer que el movimiento de los planetas sepuede describir en términos matemáticos y establece que el cuadrado delperíodo de revolución de un planeta en torno al Sol es directamenteproporcional al cubo del radio medio de su órbita.
5.4.2 Gravitación universal de Newton
La ley de gravitación universal establece un Universo dinámico, en quetodos los cuerpos interactúan gravitacionalmente. Esta ley plantea que lafuerza de atracción gravitacional es directamente proporcional al producto delas masas de los cuerpos interactuantes e inversamente proporcional alcuadrado de la distancia que los separa.
5.5 Los movimientos de la T ierra
La Tierra está en continuo movimiento. Se desplaza, con el resto deplanetas y cuerpos del sistema solar, girando alrededor del centro de nuestragalaxia, la Vía Láctea. Sin embargo, este movimiento afecta poco nuestra vidacotidiana.
• Traslación: La Tierra se mueve alrededor del Sol, impulsada por lagravitación, en 365 días, 5 horas y 57 minutos, equivalente a 365,2422días, que es la duración del año. Nuestro planeta describe una trayectoriaelíptica de 930 millones de kilómetros, a una distancia media del Sol de 150millones de kilómetros.
El Sol se encuentra en uno de los focos de la elipse. La distancia mediaSol –Tierra es 1 U.A. (Unidad Astronómica), que equivale a 149.675.000 km.
La Tierra viaja a una velocidad de 29,5 kilómetros por segundo,recorriendo en una hora 106.000 kilómetros, o 2.544.000 kilómetros al día.La excentricidad de la órbita terrestre hace variar la distancia entre la Tierray el Sol en el transcurso de un año. La máxima proximidad al Sol sedenomina perihelio (142.700.000 kilómetros del Sol) y su máxima lejaníaafelio (151.800.000 kilómetros del Sol).
• Rotación: Cada 24 horas (cada 23 h 56 minutos), la Tierra da una vueltacompleta alrededor de un eje ideal que pasa por los polos. Gira en sentidocontrario al de las agujas del reloj, produciendo la impresión de que es elcielo el que gira alrededor de nuestro planeta. A este movimiento,denominado rotación, se debe la sucesión de días y noches, siendo de díael tiempo en que nuestro horizonte aparece iluminado por el Sol, y de nochecuando el horizonte permanece oculto a los rayos solares.
• Precesión y Nutación: La Tierra es un elipsoide de forma irregular,aplastado en los polos y deformado por la atracción gravitacional del Sol,la Luna y en menor medida, de los planetas. Esto provoca una especie delento balanceo en la Tierra durante su movimiento de traslación llamado“precesión de los equinoccios”, que se efectúa en sentido inverso al derotación, es decir en sentido de las agujas del reloj.
Bajo la influencia de dichas atracciones, el eje va describiendo un doblecono de 47º de abertura, cuyo vértice está en el centro de la Tierra.
Hay otro movimiento que se superpone con la precesión, es la nutación.Como la Tierra no es esférica, la atracción de la Luna sobre el abultamientoecuatorial de la Tierra provoca el fenómeno de nutación, que es unaespecie de movimiento de vaivén del eje terrestre. En una vuelta completade precesión (25.767 años) la Tierra realiza más de 1.300 nutaciones.
Sucesión de las estaciones del año en nuestro hemisferio.

6. La Luna: nuestro satélite natural
La Luna es el único satélite natural de la Tierra. Su diámetro es de unos3.476 km, aproximadamente una cuarta parte del de la Tierra. La masa de laTierra es 81 veces mayor que la de la Luna. La densidad media de la Luna es desólo las tres quintas partes de la densidad de la Tierra, y la gravedad en lasuperficie es un sexto de la Tierra.
La Luna orbita la Tierra a una distancia media de 384.403 km y a unavelocidad media de 3.700 km/h. Completa su vuelta alrededor de la Tierra,siguiendo una órbita elíptica, en 29,53 días. El ciclo es observable en losaparentes cambios en su forma que se producen cada noche. Esto ocurreporque al desplazarse en su órbita, la Luna va cambiando gradualmente deposición (fases).
Como tarda en dar una vuelta sobre su eje el mismo tiempo que en dar unavuelta alrededor de la Tierra, siempre nos muestra la misma cara. Aunqueparece brillante, sólo refleja en el espacio el 7% de la luz que recibe del Sol.
6.1 Fases de la Luna
Las fases de la Luna son las diferentes iluminaciones que presenta nuestrosatélite en el curso de un mes.
La órbita de la Tierra forma un ángulo de cinco grados con la órbita de laLuna, de manera que cuando la Luna se encuentra entre el Sol y la Tierra, unode sus hemisferios, el que nosotros vemos, queda en la zona oscura, y por lotanto, queda invisible a nuestra vista: a esto le llamamos luna nueva o novilunio.
A medida que la luna sigue su movimiento de traslación, va creciendo lasuperficie iluminada visible desde la tierra, hasta que una semana más tardellega a mostrarnos la mitad de su hemisferio iluminado; es el llamado cuartocreciente. Una semana más tarde percibimos todo el hemisferio iluminado: es lallamada luna llena o plenilunio.
A la semana siguiente, la superficie iluminada empieza a decrecer omenguar, hasta llegar a la mitad: es el cuarto menguante. Al final de la cuartasemana llega a su posición inicial y desaparece completamente de nuestravista, para recomenzar un nuevo ciclo.
6.2. Los eclipses
Un eclipse es el oscurecimiento de un cuerpo celeste por otro. Como loscuerpos celestes no están quietos en el firmamento, a veces la sombra que unoproyecta tapa al otro, por lo que este último se ve oscuro.
En el caso de la Tierra, la Luna y el Sol tenemos dos modalidades: eclipsesde Sol, que consisten en el oscurecimiento del Sol visto desde la Tierra, debidoa la sombra que la Luna proyecta; y eclipses de Luna, que son el oscurecimientode la Luna vista desde la Tierra, debido que ésta se sitúa en la zona de sombraque proyecta la Tierra.
Si colocamos una pelota entre la luz y la pared se observará sobre la pareduna sombra circular intensa y otra mayor, pero más débil. De igual manera, laluna y la tierra proyectan en el espacio gigantescos conos de sombraproducidos por la iluminación del sol.
Cuando la luna se interpone entre la Tierra y el Sol, el cono de su sombra seproyecta sobre una zona de la Tierra, y las personas que habitan en esa zonaquedan en la oscuridad, como si fuese de noche, porque la luna eclipsa (tapa) alsol. Este astro se ve como cubierto por la luna. Esto es un eclipse de sol.
Del mismo modo, cuando la luna cruza el cono de sombra de la Tierra,desaparece a la vista de los habitantes del hemisferio no iluminado (noche) loscuales pueden presenciar, en su totalidad, el eclipse de luna. El eclipse de solse produce solamente sobre una pequeña porción de la Tierra, porque la Luna,por su menor tamaño, no oculta completamente al sol para la totalidad de laTierra.
Los eclipses de sol pueden ser de tres tipos:
• Totales: Cuando la luna se interpone entre el sol y la tierra, y loshabitantes no ven la luz solar durante algunos minutos.
• Parciales: Cuando la penumbra abarca una extensión de tierra, y loshabitantes que están en ella sólo ven una porción de Sol.
• Anulares: Cuando el cono de sombra de la luna no llega hasta la tierraporque se encuentra demasiado lejos del planeta para ocultar el discosolar.
El cono de sombra se divide en dos partes: umbra o sombra total, ypenumbra o sombra parcial. Para las personas que se encuentran en lazona de la umbra, el eclipse será total, mientras que para las personas quese encuentran en la penumbra el eclipse será parcial.
La faja de sombra o umbra es de 270 Km. Y la penumbra alcanza hasta6400 Km de anchura. En un año puede haber un máximo de 7 eclipses y unmínimo de 2.
6.3 Las mareas
La gravedad del Sol y de la Luna, conjuntamente con la posición de ambosastros respecto a la Tierra, tiene los siguientes efectos sobre los oceanosterrestres:
• Marea alta: El Sol y la Luna están alineados frente a la Tierra y ejercensus fuerzas en la misma dirección sobre nuestro planeta.
• Marea baja: El Sol y la Luna atraen a la Tierra en sentidos distintos.
6.4 El origen de la Luna
• Hipótesis de fisión: La hipótesis de fisión supone que originariamente laTierra y la Luna eran un sólo cuerpo y que parte de la masa fue expulsada,debido a la inestabilidad causada por la fuerte aceleración rotatoria que enaquel momento experimentaba nuestro planeta. La parte desprendida se“quedó” con parte del momento angular del sistema inicial y, por tanto,siguió en rotación que, con el paso del tiempo, se sincronizó con su periodode traslación.
Se cree que la zona que se desprendió corresponde al Océano Pacífico,que tiene unos 180 millones de kilómetros cuadrados y con una profundidadmedia de 4.049 metros. Sin embargo, los detractores de esta hipótesisopinan para poder separarse una porción tan importante de nuestroplaneta, éste debería haber rotado a una velocidad tal que diese una vueltaen tan sólo 3 horas. Parece imposible tan fabulosa velocidad. porque conella la Tierra no se hubiese formado al presentar un exceso de momentoangular.
• Hipótesis de la captura: Una segunda hipótesis denominada ‘decaptura’, supone que la Luna era un astro independiente, formado en unmomento distinto al nuestro y en un lugar alejado. La Luna inicialmentetenía una órbita elíptica con un afelio (punto más alejado del Sol) situado ala distancia que le separa ahora del Sol, y con un perihelio (punto máscercano al Sol) cerca del planeta Mercurio. Esta órbita habría sidomodificada por los efectos gravitacionales de los planetas gigantes, quealteraron todo el sistema planetario expulsando de sus órbitas a diversoscuerpos, entre ellos, nuestro satélite. La Luna viajó durante mucho tiempopor el espacio hasta aproximarse a la Tierra y fue capturado por lagravitación terrestre. Sin embargo, es difícil explicar cómo sucedió laimportante desaceleración de la Luna, necesaria para que ésta noescapara del campo gravitatorio terrestre.
• Hipótesis de acreción binaria: La hipótesis de la acreción binaria
supone su formación al mismo tiempo que la Tierra, a partir del mismomaterial y en la misma zona del Sistema Solar. A favor de esta teoría seencuentra la datación radioactiva de las rocas lunares traídas a nuestroplaneta por las diversas misiones espaciales, las cuales fechan entre 4.500y 4.600 millones de años la edad lunar, aproximadamente la edad de laTierra.
Como inconveniente tenemos que, si los dos se crearon en el mismo lugary con la misma materia: ¿cómo es posible que ambos posean unacomposición química y una densidad tan diferentes? En la Luna abunda eltitanio y los compuestos exóticos, elementos no tan abundantes en nuestroplaneta al menos en la zona más superficial.
• Hipótesis de impacto: La hipótesis del impacto parece la preferida en laactualidad. Supone que nuestro satélite se formó tras la colisión contra laTierra de un cuerpo de aproximadamente un séptimo del tamaño de nuestroplaneta. El impacto hizo que bloques gigantescos de materia saltaran alespacio para posteriormente y, mediante un proceso de acreción, similar alque formó los planetas rocosos próximos al Sol, generar la Luna.
Lo más dudoso de esta teoría es que tendrían que haberse dadodemasiadas coincidencias juntas. La probabilidad de impactar con un astroerrante era muy alta al inicio del Sistema Solar. Más difícil es que la colisiónno desintegrase totalmente el planeta y que los fragmentos fuesen losuficientemente grandes como para poder generar un satélite.
La teoría del impacto ha sido reproducida con ayuda de ordenadores,simulando un choque con un objeto cuyo tamaño sería equivalente al deMarte, y que, con una velocidad inferior a los 50.000 km/h, posibilitaría laformación de un satélite.
• Hipótesis de precipitación: Últimamente ha aparecido otra explicacióna la que dan el nombre de “Hipótesis de precipitación”, según la cual, laenergía liberada durante la formación de nuestro planeta calentó parte delmaterial, formando una atmósfera caliente y densa, sobre todo compuestapor vapores de metal y óxidos. Éstos se fueron extendiendo alrededor delplaneta y , al enfriarse, precipitaron los granos de polvo que, una vezcondensados, dieron origen al único satélite de la Tierra.
1. Sistema geocéntrico: Postula a la Tierra como un globo inmóvil alrededordel cual giran los objetos celestes.
2. Sistema heliocéntrico: Atribuye una posición central al Sol.
Bibliografía General
Para la confección de este texto, se utilizó la siguiente bibliografía en losconceptos, en gráfica y ejemplos planteados para los temas considerados en laPrueba de Ciencias “Físicas”.
• Física General, 4ª Edición, Antonio Máximo, Beatriz Alvarenga; OxfordUniversity Press,1998.
• Física Conceptual, 2ª Edición, Paul G. Hewitt, Addison; WesleyIberoamericana, 1995.
• Física C.O.U. Antonio Martínez, José Luis Hernández, Miguel GisbertBruño, 1997.
• Física – Química. Bachillerato, T. García Pozo, M.S. Cantos Castillejos,J.R. García-Serna Colomina, J. Rodríguez Seara, Edebé, 1998.
• Libro Mineduc, 1° y 2° medio.
• Física II Medio; Marcos Jáuregui, Gloria Núñez, Mario Toro; Santillana;2000.
• Física I, 4ª Edición, Raymond A. Serway, McGraw- Hill, 1998.
• Física y Química, Enciclopedia Didáctica, Océano, 1999.
• Física. Bachillerato, J. Armero Rovira, D. J. Castello Castellano, T.García Pozo, M.J. Martínez de Murguía Larrechi, Edebé, 1999.
• Investiguemos 10, 7ª edición, Mauricio Villegas, Ricardo Ramírez,Voluntad, 1989.
• Explorando los dominios de la Física I y II, Roberto Herrera, TeodoroJarufe, Salesiana, 1991.
• Física una Ciencia para todos, Caraballo M., Olana H., Torruella S.,Merrill Publishing Company, 1998.
• Matemáticas II. Bachillerato, A. Biosca, M.J. Espinet, M.J. Fandos, M.Jimeno, Edebé, 1999.
• Ciencias Biológicas, Plan común III, Ulises Hidalgo, José Jerez, VincaRamírez, Daniel Varela, Santillana, 1994.
ÍndiceCAPÍTULO 1: INTRODUCCIÓN A LA FÍSICA
1. Magnitudes físicas: fundamentales y derivadas.2. Sistema de unidades3. Análisis dimensional4. Análisis vectorial
4.1 Vector4.1.1 Características de un vector4.1.2 Representación de un vector en un sistema decoordenadas4.1.3 Vectores unitarios4.1.4 Operaciones entre vectores
CAPÍTULO 2: EL MOVIMIENTO1. Descripción del movimiento
1.1 Velocidad y rapidez1.2 Aceleración
1.2.1 Aceleración media1.3 Clasificación de los movimientos
1.3.1 Movimiento rectilíneo1.4 Movimientos verticales
1.4.1 Caída libre1.4.2 Lanzamiento hacia arriba
1.5 Movimiento relativo2. Fuerza y movimiento
2.1 Fuerza y masa2.2 Leyes de Newton
2.2.1 Sistema de referencia2.3 Diagrama de cuerpo libre2.4 Fuerzas mecánicas
2.4.1 Peso ()2.4.2 Fuerza normal ()2.4.3 Tensión ()2.4.4 Fuerza de roce (Fricción o rozamiento )2.4.5 Fuerza elástica ()
2.5 Torque ()2.6 Estática y equilibrio2.7 Impulso y cantidad de movimiento
2.7.1 El Momentum y su conservación2.8 Choques
2.8.1 Tipos de choquesCAPÍTULO 3: LA ENERGÍA
1. Trabajo mecánico (W)2. Potencia mecánica (P)
2.1 Relación entre potencia y velocidad3. Teorema Trabajo - Energía4. Energía cinética (Ec)5. Energía potencial (Ep)
5.1 Energía potencial gravitatoria5.1.1 Trabajo realizado por la energía potencialgravitatoria
5.2 Energía potencial elástica (Ee)5.2.1 Trabajo realizado por la fuerza elástica
6. Energía mecánica (E)6.1 Conservación de la energía mecánica
6.1.1 Principio de conservación de la energía mecánica6.1.2 Trabajo realizado por las fuerzas no conservativas
CAPÍTULO 4: El sonido y la luz1. Vibración y sonido
1.1 Oscilaciones1.2 Ondas
1.2.1Clasificación de las ondas1.2.2 Representación gráfica de una onda1.2.3 Velocidad de propagación1.3 Fenómenos ondulatorios
2. Ondas y sonido2.1 Características del sonido2.2 Fenómenos ondulatorios asociados al sonido2.3 El oído
2.3.1 Recepción del sonido2.3.2 Estructura del oído2.3.3 Transmisión de ondas sonoras
3. La luz3.1 Propagación de la luz3.2 Velocidad de la luz3.3 Transmisión de la luz3.4 Reflexión de la luz3.5 Rayos principales para los espejos esféricos3.6 Formación de imágenes en espejos esféricos
3.6.1 Espejo concavo3.6.2 Espejo convexo
3.7 Refracción de la luz3.8 Lentes esfericas3.9 Recepción de imágenes por el ojo humano3.10 Reflexión interna total de la luz3.11 Absorción de la luz3.12 Difracción3.13 Interferencia
4. Naturaleza de la luz ¿ondulatoria o corpuscular?4.1 ¿Por qué percibimos los objetos de diferentes colores?4.2 ¿Qué es un rayo láser?4.3 Instrumentos ópticos
CAPÍTULO 5: LA ELECTRICIDAD1. Electrostática
1.1 Carga Eléctrica1.2 Materiales eléctricos1.3 Métodos de carga eléctrica
2. Electrodinámica2.1 Corriente eléctrica2.2 Ley de Ohm
2.2.1 Resistencia eléctrica2.2.2 Resistencia y temperatura2.2.3 El significado energético de la ley de Ohm
2.3 Circuitos de corriente continua2.3.1 Disposición de resistencias
2.4 Elementos de un circuito2.4.1 Fuerza electromotriz de un generador
2.5 Potencia eléctrica2.6 Energía eléctrica2.7 Ley de Joule
3. Generación de energía eléctrica3.1 Centrales hidroeléctricas3.2 Centrales termoeléctricas3.3 Centrales eólicas3.4 Centrales nucleares3.5 Centrales fotovoltaicas3.6 Centrales solares3.7 Centrales geotérmicas3.8 Centrales maremotrices
CAPÍTULO 6: MAGNETISMO1. Polos magnéticos
1.1 Funcionamiento de los imanes1.2 Materiales magnéticos
2. Campo magnético2.1 Campo magnético terrestre2.2 La brújula2.3 Campo magnético generado por una corriente eléctrica2.4 Relación entre la intensidad y la corriente eléctrica
2.5 Corriente eléctrica producida por un campo magnético variableCAPÍTULO 7: EL CALOR
1. El calor y la temperatura1.1 Medición de la temperatura1.3 Dilatación térmica
2. Materiales y calor2.1 Capacidad calórica y calor específico2.2 Principio de Regnault2.3 Transmisión del calor2.4 Cambios de estado (Fase)
2.4.1 Estados de la materia2.4.2 Calor latente de cambio de fase2.4.3 Leyes de cambio de fase
2.5 Equivalente mecánico del calor2.6 Transformaciones de energía y su conservación2.7 Los Recursos energéticos2.8 Roce y calor
CAPÍTULO 8: LA TIERRA Y SU ENTORNO1. Morfología de la Tierra
1.1 Nacimiento de la Tierra1.2 Estructura de la Tierra1.3 Características de la Tierra1.4 Imán terreste1.5 Composición de la Tierra1.6 Estructura de la Tierra1.7 La atmósfera1.8 La hidrosfera1.9 Ciclo del agua1.10 Formación de los continentes
2. El dinamismo del planeta2.1 Interacción entre placas2.2 Procesos modeladores del relieve terrestre2.3 Los sismos
2.3.1 Magnitud de escala Richter2.3.2 Intensidad en escala de Mercalli2.3.3 Comportamiento de las ondas sísmicas en las rocas2.3.4 Actividad sísmica en Chile
2.4 Clasificación de edificios y estructuras3. Contaminación
3.1 Un ser enfermo: ¿Cómo cuidar la Tierra?3.2 Identificando el virus3.3 Lluvia ácida3.4 ¿Existe remedio para esta enfermedad?
CAPÍTULO 9: LA VÍA LÁCTEA Y EL SISTEMA SOLAR1. El origen del universo2. Las estrellas
2.1 El Sol3. Las galaxias4. La Vía Láctea5. El sistema solar
5.1. Desarrollo histórico del conocimiento del sistema solar5.2. Características del sistema solar5.3. Los planetas y sus características
5.3.1. Nuevos y viejos planetas5.4 Leyes que rigen el sistema solar
5.4.1 Leyes de Kepler5.4.2 Gravitación universal de Newton
5.5 Los movimientos de la Tierra6. La Luna: nuestro satélite natural
6.1 Fases de la Luna6.2. Los eclipses6.3 Las mareas6.4 El origen de la Luna
Bibliografía General






























