-
1
Compensacin del dimetro de la herramienta (G40, G41 y G42)
Cuando es ejecutado el maquinado de un contorno en una pieza de
trabajo, la ruta de la herramienta debe ser tal que dicha
herramienta sea compensada por la magnitud de su radio, como se
muestra en la Fig. 1. La funcin que logra esta compensacin
automticamente es llamada compensacin del dimetro de la
herramienta. La programacin que utiliza esta compensacin se explica
a continuacin.
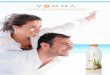
Fig. 1 Compensacin de la ruta de la herramienta.
a. Mtodo de comando de la compensacin del dimetro de la
herramienta El plano en el cual la compensacin de la herramienta va
a ser hecha, es seleccionado mediante el comando de designacin de
plano (seleccin del plano de compensacin G17, G18, G19). Para la
compensacin de la herramienta, el vector de compensacin es
calculado en el plano seleccionado (direccin y magnitud de la
compensacin). Esto se explica en las Figs. 2 y 3
Fig. 2 Mtodo de comando de G41 y G42.
Fig. 3 Mtodo de comando de G40.
La compensacin de la herramienta se hace durante el movimiento
de la herramienta, en donde dicho movimiento puede ser ejecutado
mediante el comando de posicionamiento (G00) o por el de
interpolacin lineal (G01). La compensacin del dimetro de la
herramienta no puede hacerse cuando se comanda la interpolacin
circular (G02, G03). Cuando se comanda la compensacin de la
herramienta a la izquierda, con respecto a la direccin del avance
de la herramienta mediante el comando G41, el corte es descendente
[Fig. 4 (a)]. Ahora, cuando la herramienta es compensada a la
derecha, con relacin a la direccin del avance de la herramienta
mediante el comando G42, el corte es ascendente [Fig. 4 (b)].
Compensacin de dimetro de la
herramienta (G41:Izquierda;
G42:derecha)
Designacin del
plano XY (en caso
de G17)
Posicionamiento
en interpolacin
lineal
Comando de
movimiento
Nmero de compensacin del
dimetro de la herramienta (o
nmero de compensacin)
comando de movimiento
Cancelacin de la compensacin
de dimetro de la herramienta
Posicionamiento
en interpolacin
lineal
Herramienta
Trayectoria preparada
en el programa Pieza de trabajo
Trayectoria del centro de
la herramienta
Vector de compensacin
compensacin
-
Proyecto, Manufactura, Ingeniera y Test Asistido por
Computadora
2
0: G17 G90 G54 G00 X0 Y0 S4000;G17 Seleccin del plano
0P1:G41 G00 X30.0 Y15.0 D01 M03;......
P1P2: G01 Y50.0 F150; P2P3: X65.0; P3P4: Y25.0; P4P5: X20.0; P5
0: G40 G00 X0 Y0 M05;......
G41 Compensacin a la
izquierda en relacin a la
direccin del avance.
G00 Comando de movimiento
y de compensacin 01
G41 Compensacin a la izquierda
G40 Cancelacin de la compensacin
G00 Comando de movimiento
(a) En el caso de G41 (b) En el caso de G42
Fig. 4 Direccin de la compensacin. El comando de movimiento esta
dado por las direcciones X, Y, Z. Este comando debe ser para ms de
un eje sobre el plano de compensacin seleccionado, y debe
involucrar el movimiento actual de la herramienta. Siguiendo la
direccin D, el nmero de la compensacin del dimetro de la
herramienta es comandado con un valor numrico de dos dgitos o menos
(01 a 99, 00 indica una cantidad de compensacin cero). La
herramienta es compensada por la cantidad que corresponde al nmero
de compensacin comandado a continuacin de la direccin D (es la
cantidad colocada en la memoria de compensacin de la herramienta de
la unidad de CN). La compensacin G41 y G42 es cancelada (liberada)
por el comando G40 (Fig. 3). El rango de tiempo desde que G41 G42
son comandados hasta que G40 es comandado se llama modo de
compensacin. La Fig. 5 muestra un ejemplo de un programa que usa la
compensacin del dimetro de la herramienta.
Fig. 5 Ejemplo de un programa. La cantidad de compensacin puede
ser reescrita arbitrariamente. Esto significa, que cuando se
utiliza la compensacin del dimetro de la herramienta, la forma
exacta de la pieza de trabajo puede ser programada
independientemente de los tamaos de los dimetros de las
herramientas [(fig. 6) (b)]. Adems, existen otras ventajas, por
ejemplo, mediante el ajuste de la cantidad de compensacin, puede
ser seleccionada cualquier cantidad que permita el acabado deseado,
repeticin de desbastes, y corte de acabado en un mismo programa
[fig. 6 (c)].
Direccin del avance de la
herramienta
Direccin de
rotacin de la
herramienta
Compensacin a la
izquierda en relacin al
avance
Volumen de
compensacin
Direccin del avance de
la herramienta
Direccin de rotacin de
la herramienta
Compensacin a la derecha en
relacin al avance
Compensacin
-
3
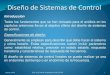
Fig. 6 Utilizacin de la compensacin del dimetro de la
herramienta.
(a) Introduccin de la cantidad
de compensacin
Trayectoria de la
Herramienta
para corte rugoso Forma especificada
Radio de
herramienta
Cantidad de compensacin
Margen de acabado
(c) Cantidad de compensacin
incluyendo el margen para el
acabado
G41 G00 X_____Y______ D01;
Valor de entrada de D01 en la memoria
de compensacin de la herramienta
En el caso de D01 = 10.000
En el caso de D01 = 25.000
En el caso de D01 = 10.500
(Mo
do
de
com
pen
saci
n
)
G40 G00 X_____ Y _____;
(b) Posicionando la cantidad de
compensacin acorde al
dimetro de la herramienta