Embed Size (px)
Citation preview
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 1/15
INTRODUCCION
Los métodos estudiados se basan es la aplicación de sencillas formulas recurrentes en cada
intervalo de tiempo, los cuales son más precisos entre más pequeño sea el intervalo detiempo. Entre los métodos estudiados se citan el método de newmar beta y la integral deduhamel la cual representa el desplazamiento total provocado por una fuerza excitadoraactuando sobre el amortiguador sin amortiguador, incluye además la parte estacionariacomo a la transitoria del movimiento y la respuesta de un sistema amortiguado se obtienede una manera enteramente equivalente al caso no amortiguado
El Newmark-beta es un método numérico de integración para resolver ecuacionesdiferenciales. Es utilizado en el análisis de elementos finitos para modelos dinámicossistemas. Newmark ha expresado las velocidades y desplazamientos en el extremo de un
incremento de tiempo en términos de los parámetros conocidos en el principio y elaceleración desconocida al final del paso del tiempo. En 1959 Newmark presento el métodode integración de paso único para la solución de problemas dinámicos estructurales paracargas sísmicas. Durante los pasados 40 años, el método de Newmark ha sido aplicado alanálisis dinámico de muchas estructuras en ingeniería .También ha sido modificado ymejorado por otros investigadores.
En 1962 Newmark formulo el método de Newmark en notación matricial, adicionandorigidez y amortiguamiento proporcional a la masa, y elimino la necesidad de la iteración alintroducir la solución directa de las ecuaciones en cada paso
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 2/15
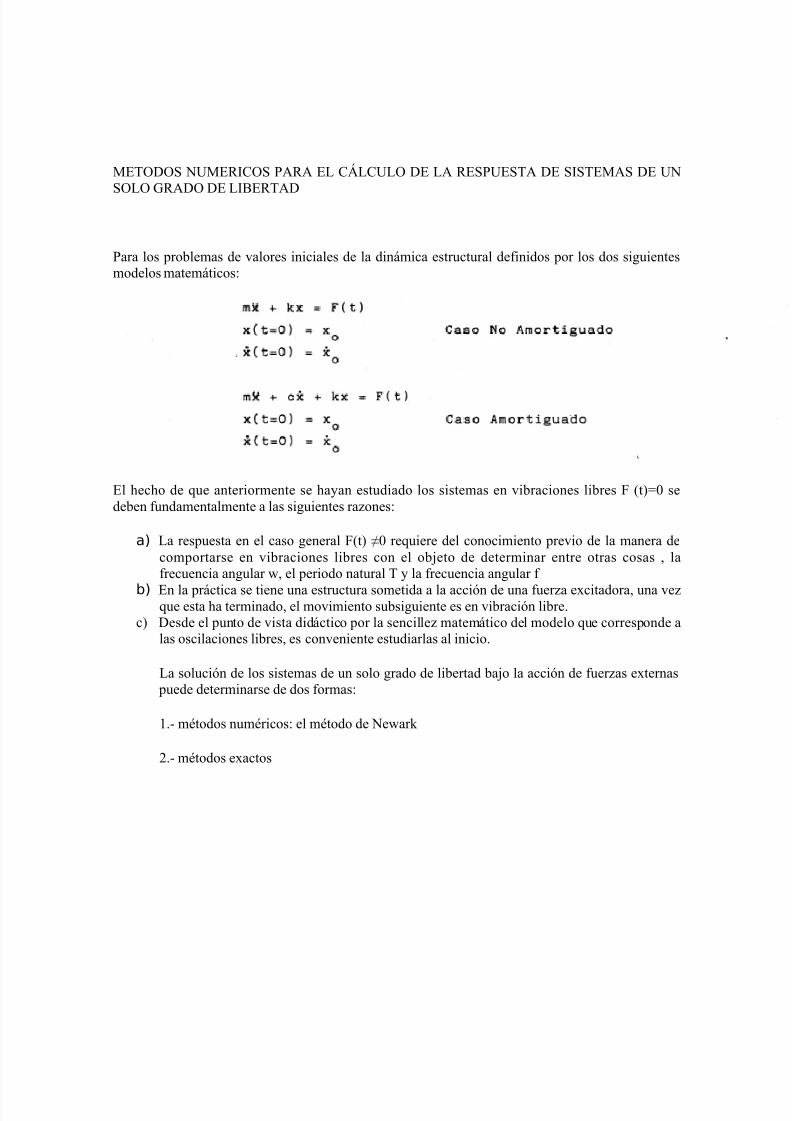
METODOS NUMERICOS PARA EL CÁLCULO DE LA RESPUESTA DE SISTEMAS DE UN
SOLO GRADO DE LIBERTAD
Para los problemas de valores iniciales de la dinámica estructural definidos por los dos siguientesmodelos matemáticos:
El hecho de que anteriormente se hayan estudiado los sistemas en vibraciones libres F (t)=0 sedeben fundamentalmente a las siguientes razones:
a) La respuesta en el caso general F(t) ≠0 requiere del conocimiento previo de la manera decomportarse en vibraciones libres con el objeto de determinar entre otras cosas , lafrecuencia angular w, el periodo natural T y la frecuencia angular f
b) En la práctica se tiene una estructura sometida a la acción de una fuerza excitadora, una vezque esta ha terminado, el movimiento subsiguiente es en vibración libre.
c) Desde el punto de vista didáctico por la sencillez matemático del modelo que corresponde alas oscilaciones libres, es conveniente estudiarlas al inicio.
La solución de los sistemas de un solo grado de libertad bajo la acción de fuerzas externas puede determinarse de dos formas:
1.- métodos numéricos: el método de Newark
2.- métodos exactos
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 3/15
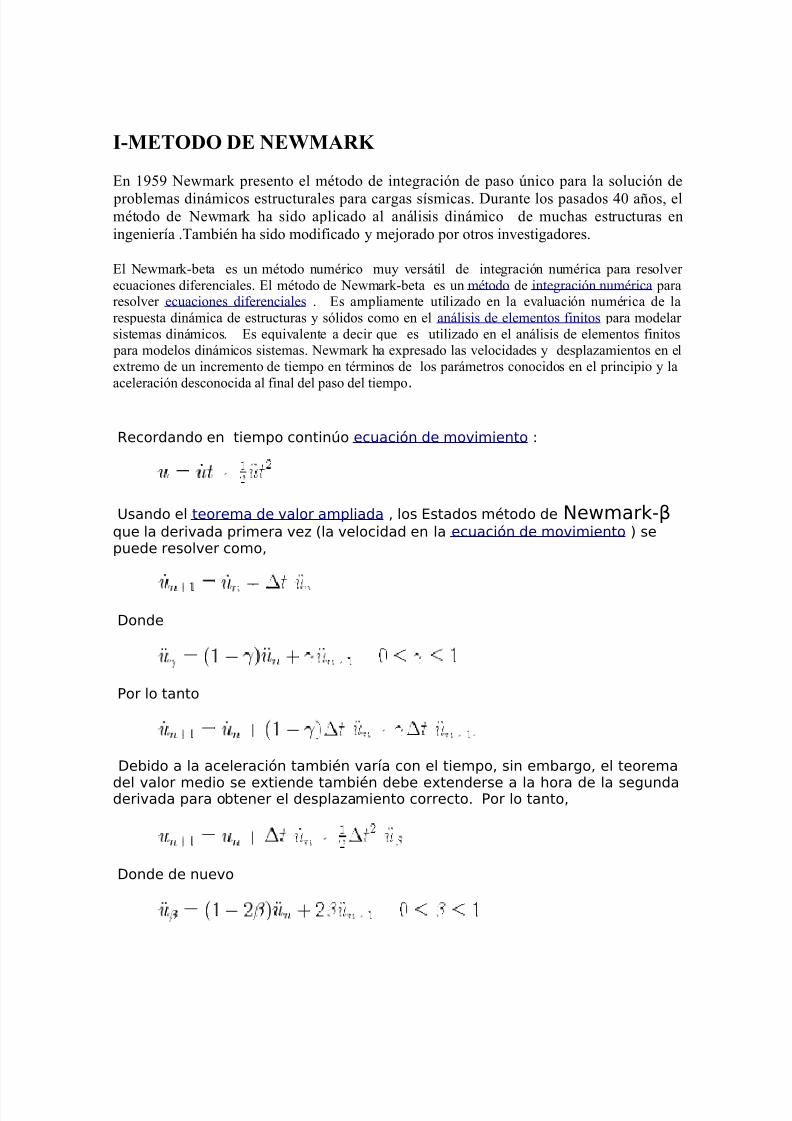
I-METODO DE NEWMARK
En 1959 Newmark presento el método de integración de paso único para la solución de
problemas dinámicos estructurales para cargas sísmicas. Durante los pasados 40 años, elmétodo de Newmark ha sido aplicado al análisis dinámico de muchas estructuras eningeniería .También ha sido modificado y mejorado por otros investigadores.
El Newmark-beta es un método numérico muy versátil de integración numérica para resolver ecuaciones diferenciales. El método de Newmark-beta es un método de integración numérica pararesolver ecuaciones diferenciales . Es ampliamente utilizado en la evaluación numérica de larespuesta dinámica de estructuras y sólidos como en el análisis de elementos finitos para modelar sistemas dinámicos. Es equivalente a decir que es
utilizado en el análisis de elementos finitos para modelos dinámicos sistemas. Newmark ha expresado las velocidades y desplazamientos en elextremo de un incremento de tiempo en términos de los parámetros conocidos en el principio y laaceleración desconocida al final del paso del tiempo.
Recordando en tiempo continúo ecuación de movimiento :
Usando el teorema de valor ampliada , los Estados método de Newmark-βque la derivada primera vez (la velocidad en la ecuación de movimiento ) sepuede resolver como,
Donde
Por lo tanto
Debido a la aceleración también varía con el tiempo, sin embargo, el teorema
del valor medio se extiende también debe extenderse a la hora de la segundaderivada para obtener el desplazamiento correcto. Por lo tanto,
Donde de nuevo
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 4/15
Newmark demuestra que un valor razonable de γ es de 0,5, por lo tanto, son las reglas deactualización,
Y la Configuración β a distintos valores entre 0 y 1 puede dar una amplia gama de resultados. Normalmente, β = 1 / 4, lo que produce el método de la media aceleración constante, se utiliza.
Dentro de ciertos límites, β, puede seleccionarse a gusto debido a que es un factor que toma encuenta la variación de la aceleración en el intervalo de tiempo t ,el valor seleccionado afecta larapidez de convergencia dentro de cada iteración, la estabilidad del análisis y la magnitud del error.Un valor adecuado está relacionado con un buen valor de t.
Investigaciones han demostrado que se obtienen resultados de precisión aceptable si β se tomadentro del rango 1 / 4 y 1 / 6 y t menor o igual a 1 / 10 del periodo natural T
TODO ESTO ES FORMULADO EN LAS ECUACIONES SIGUIENTES:
Dentro de ciertos límites B, puede seleccionarse a gusto, debido a que es un factor que toma en
cuenta la variación de la aceleración en el intervalo de tiempo Δti el valor seleccionado afecta larapidez de convergencia dentro de cada iteración, la estabilidad del análisis y la magnitud del error
un valor de B adecuado a está relacionado con un buen valor Δti.
Investigaciones sobre el método B de newmark, han demostrado que se obtienen resultados de
precisión aceptable si B se toma dentro del rango 1/6 a 1/4 y Δti menor o igual 1/10 del periodonatural T.
Si la ecuación 5.71 se agrupan términos estos se aplican en otra ecuación visto en otros métodos
numéricos despejando variables despejando el incremento de la aceleración Δx¨i

5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 5/15
Ahora si l ec. 5.71 se suma y se resta x¨ i , se sustituyen las ecuaciones aplicadas por los otros
métodos numéricos y además se sustituye el valor x¨ i dado por la ecuación 5.72 se obtiene la
fórmula para el cálculo de el incremento de la velocidad Δx˙i .
Y por ultimo sustituyendo los valores Δx˙i, x¨ i En la ecuación de equilibrio dinámico sedeterminan las ecuaciones para el cálculo de ki y ΔFi.
Inspeccionando las ecuaciones 5.72 ,5.73 ,5.74, 5,75 revelan que cuando se toma B=1/4,corresponde exactamente al método de la aceleración promedio y si B= 1/6, corresponde al métodode aceleración lineal (siendo otro método numérico muy aplicado).
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 6/15
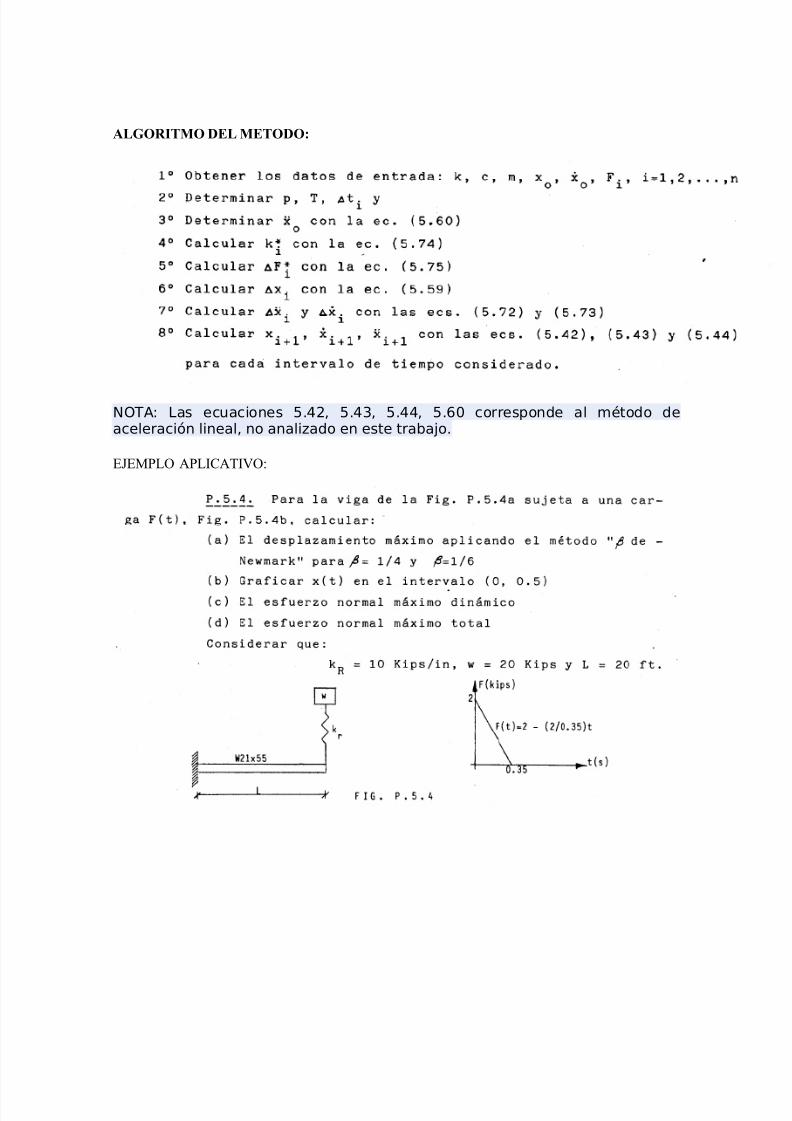
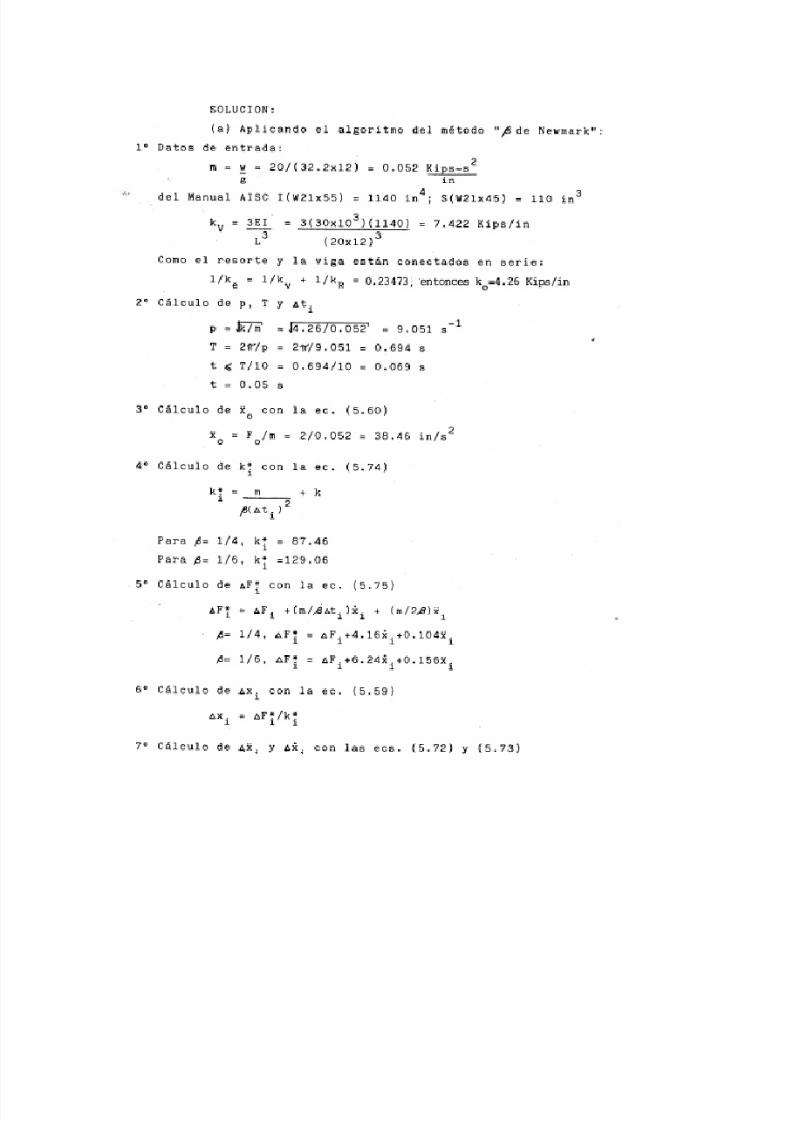
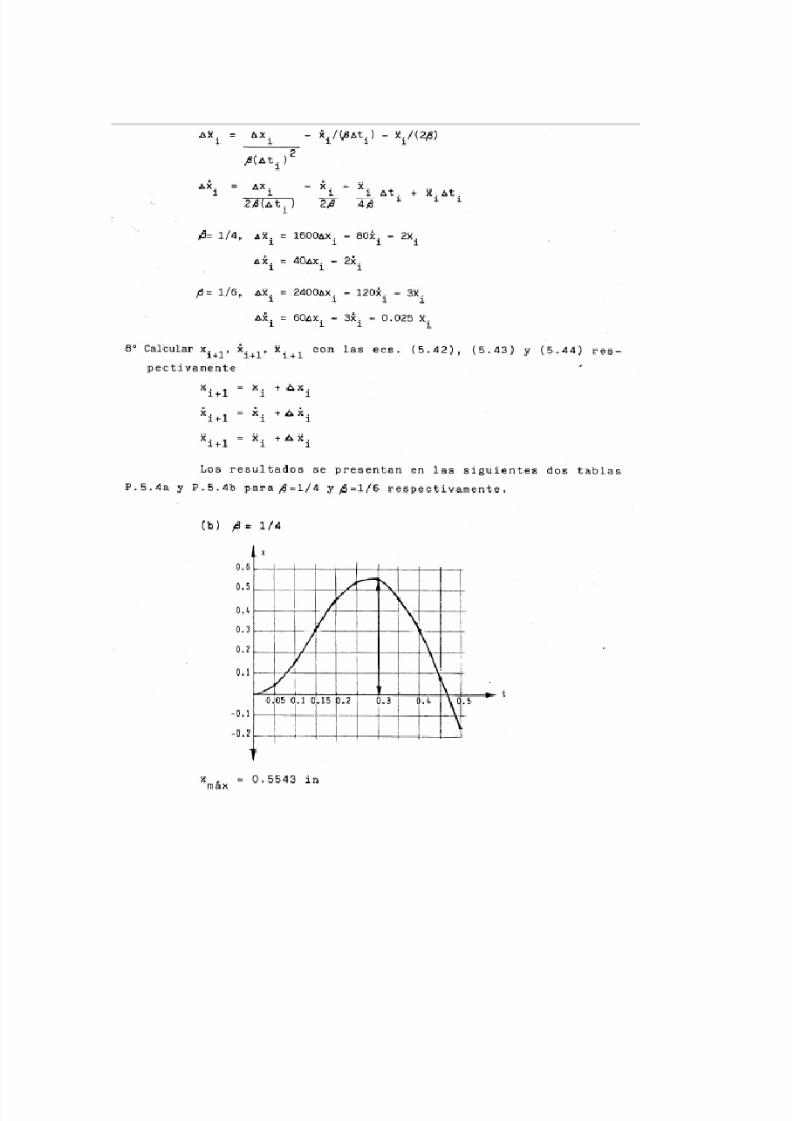
ALGORITMO DEL METODO:
NOTA: Las ecuaciones 5.42, 5.43, 5.44, 5.60 corresponde al método deaceleración lineal, no analizado en este trabajo.
EJEMPLO APLICATIVO:
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 7/15
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 8/15
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 9/15
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 10/15
II -INTEGRAL DE DUHAMEL
Representa el desplazamiento total provocado por la fuerza excitadora actuando sobre eloscilador sin amortiguador, incluye tanto la parte estacionaria como a la transitoriade movimiento. Si la función no puede expresarse analíticamente la integral puedeevaluarse en forma aproximada por un método numérico. Para incluir el efecto deldesplazamiento inicial, y la velocidad inicial en t igual a cero, solo es necesarioañadir a la ecuación 2.2 la solución dada por la ecuación 3.13 para los efectosdebidos a las condiciones iniciales, así ,el desplazamiento total de un sistema de ungrado de libertad sin amortiguamiento sujeto a una carga arbitraria esta dado por laecuación 2.3
La respuesta de un sistema amortiguado expresado por la integral de duhamel ser obtienede una manera enteramente equivalente al caso no amortiguado, excepto que lavelocidad inicial debida al impulso debe sustituirse en la ecuación de vibracioneslibres amortiguadas
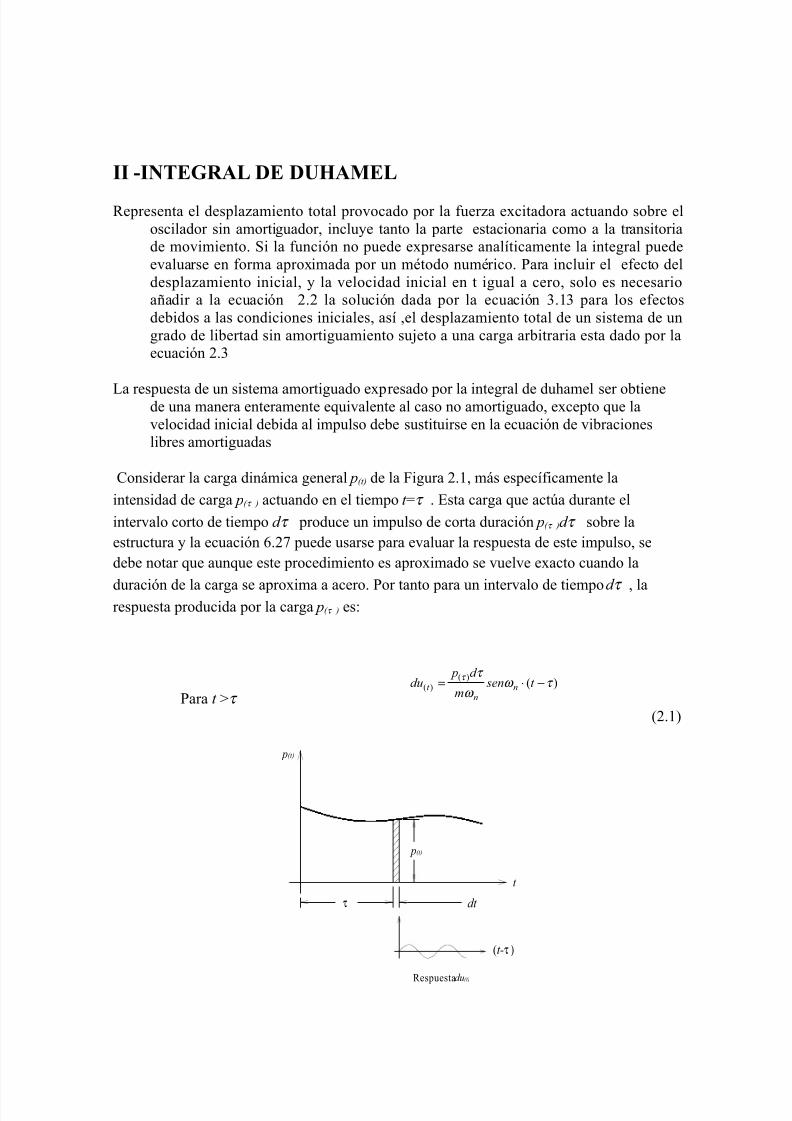
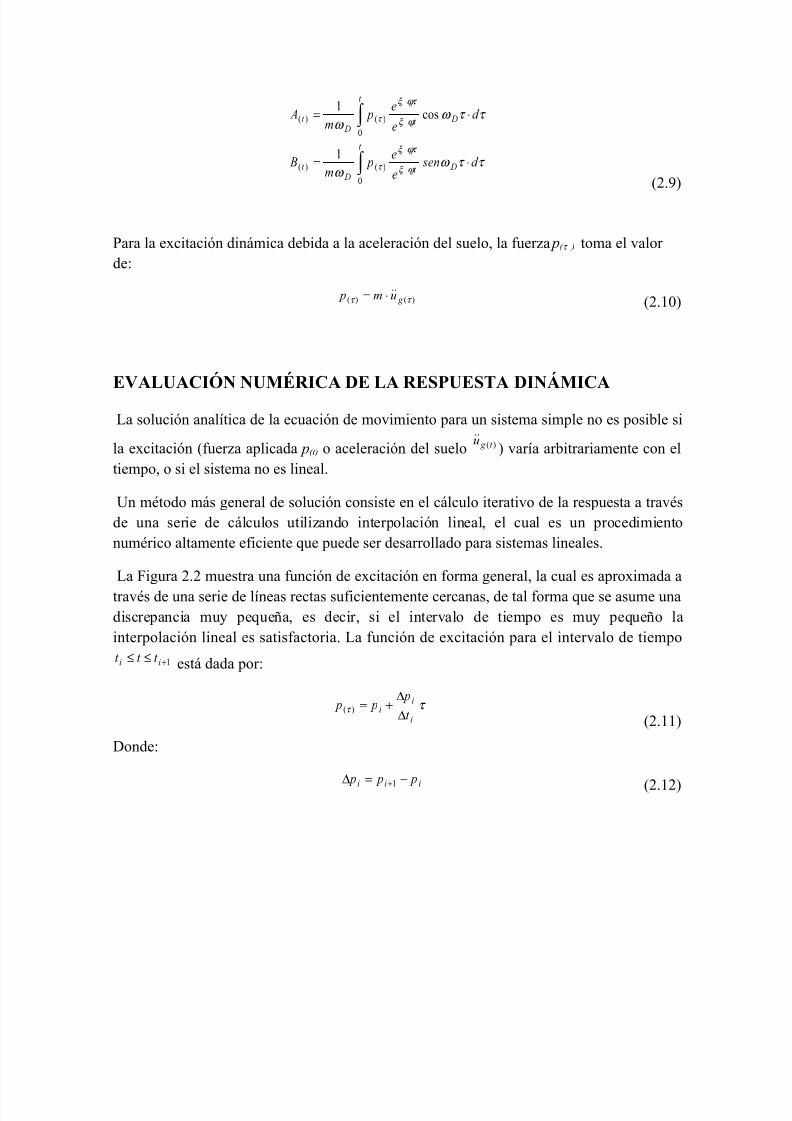
Considerar la carga dinámica general p(t) de la Figura 2.1, más específicamente la
intensidad de carga p( τ ) actuando en el tiempo t =τ . Esta carga que actúa durante el
intervalo corto de tiempo d τ produce un impulso de corta duración p( τ )d τ sobre laestructura y la ecuación 6.27 puede usarse para evaluar la respuesta de este impulso, sedebe notar que aunque este procedimiento es aproximado se vuelve exacto cuando la
duración de la carga se aproxima a acero. Por tanto para un intervalo de tiempo d τ , larespuesta producida por la carga p( τ ) es:
Para t >τ )(
)()( τ ω
ω
τ τ −⋅= t sen
m
d pdu n
nt
(2.1)
dt
t
p(t)
(t-τ )
Respuestadu(t)
τ
p(t)
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 11/15
Figura 2.1 Derivación de la integral de Duhamel (no amortiguado)
En esta expresión el término du(t) representa la respuesta diferencial al impulso diferencial yno la variación de u durante el intervalo de tiempo dt.
El histograma de carga completo consiste de una sucesión de impulsos cortos, cada uno deellos produce su propia respuesta diferencial. La respuesta total a la carga arbitraria es lasuma de todos los impulsos de duración d τ , es decir:
∫ −=
t
nn
t d t sen pm
u
0
)()( )(1
τ τ ω
ω τ
(2.2) Esta es una expresión exacta llamada integral de Duhamel. Debido a que esta basada en el principio de superposición solamente es aplicable a estructuras linealmente elásticas. En la ecuación 2.2 se asume tácitamente que la carga se inicia en el tiempo t=0 cuando la
estructura esta en reposo; para condiciones iniciales distintas del reposo0)0( ≠u
y0)0( ≠u
se añade la respuesta en vibración libre a la solución, entonces se tiene:
∫ −++=
t
nn
nnn
t d t sen pm
t ut senu
u
0
)()0(
)0(
)( )(1
cos τ τ ω
ω
ω ω
ω τ
(2.3)
Usando la integral de Duhamel para un SDF no amortiguado la repuesta se determinaasumiendo condiciones iniciales en reposo para una fuerza p(t)= p0 y t>0, entonces laecuación 2.2 es:
)cos1()(cos
)( 0
0
0
0
0)( t
k
pt
m
pd t sen
m
pu n
t
n
n
n
t
nn
t ω ω
τ ω
ω τ τ ω
ω −=
−=−= ∫
Integral de duhamel para un sistema no amortiguado
Si la función de carga es integrable, la respuesta dinámica de la estructura puede ser evaluada por integración formal de la ecuación 2.2 ó 2.3; sin embargo en muchos casos lacarga es conocida solo de datos experimentales, y la respuesta debe ser evaluada por
procesos numéricos. Para el análisis es práctico utilizar la identidad trigonométricaτ ω ω τ ω ω τ ω ω nnnnnn sent t sent sen ⋅−⋅=− coscos)( para reformular la ecuación 2.2:
∫ ∫ ⋅⋅−⋅⋅=
t t
nn
nnn
nt d sen pm
t d pm
t senu
0 0
)()()(
1coscos
1τ τ ω
ω ω τ τ ω
ω ω τ τ
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 12/15
Ó
t Bt sen Au nt nt t ω ω cos)()()( ⋅−⋅=(2.4)
Donde:
∫ ⋅⋅=
t
nn
t d pm
A
0
)()( cos1
τ τ ω ω
τ
(2.5)
∫ ⋅=
t
nn
t d sen pm
B
0
)()(
1τ τ ω
ω τ
INTEGRAL DE DUHAMEL PARA UN SISTEMA AMORTIGUADO:
El análisis para obtener la integral de Duhamel que expresa la respuesta de un sistemaamortiguado a una carga general es similar al análisis para un sistema no amortiguado, conla única variante que la respuesta en vibración libre iniciada por un impulso diferencial
p( τ )·d τ está sujeta a un decremento exponencial. De este modo estableciendo u( 0 )=0 ymd pu /)( )()0( τ τ =
en la ecuación 4.15 da:
−= −− )(
)()()( τ ω
ω
τ τ τ ξ ω t sen
m
d pedu D
D
t t
n
(2.6)
La respuesta de la carga total arbitraria es:
∫ −= −−t
Dt
Dt d t sene p
mu n
0
)()()( )(
1τ τ ω
ω
τ ξ ω τ
(2.7)
Para una evaluación numérica de la respuesta del sistema amortiguado la ecuación 2.7 puede ser escrita en forma similar a la ecuación 7.4:
t Bt sen Au Dt Dt t ω ω cos)()()( ⋅−⋅=(2.8)
Donde en este caso:
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 13/15
∫
∫
⋅=
⋅=
t
Dt D
t
t
Dt D
t
d sene
e p
m B
d e
e p
m A
n
n
n
n
0
)()(
0
)()(
1
cos1
τ τ ω ω
τ τ ω ω
ξ ω
τ ξ ω
τ
ξ ω
τ ξ ω
τ
(2.9)
Para la excitación dinámica debida a la aceleración del suelo, la fuerza p( τ ) toma el valor de:
)()( τ τ g um p ⋅= (2.10)
EVALUACIÓN NUMÉRICA DE LA RESPUESTA DINÁMICA La solución analítica de la ecuación de movimiento para un sistema simple no es posible si
la excitación (fuerza aplicada p(t) o aceleración del suelo )(t g u) varía arbitrariamente con el
tiempo, o si el sistema no es lineal.
Un método más general de solución consiste en el cálculo iterativo de la respuesta a travésde una serie de cálculos utilizando interpolación lineal, el cual es un procedimientonumérico altamente eficiente que puede ser desarrollado para sistemas lineales.
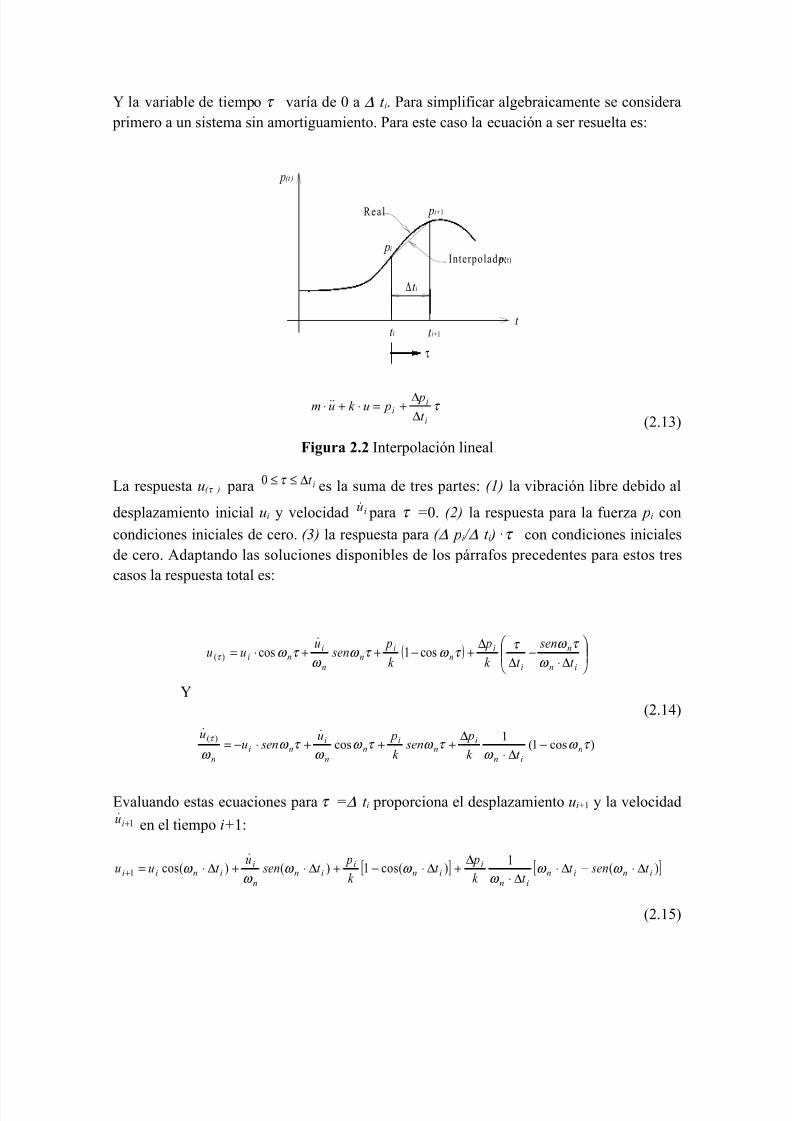
La Figura 2.2 muestra una función de excitación en forma general, la cual es aproximada através de una serie de líneas rectas suficientemente cercanas, de tal forma que se asume unadiscrepancia muy pequeña, es decir, si el intervalo de tiempo es muy pequeño lainterpolación lineal es satisfactoria. La función de excitación para el intervalo de tiempo
1+≤≤ ii t t t está dada por:
τ τ i
ii
t
p p p
∆
∆+=)(
(2.11)
Donde:
iii p p p −=∆ +1 (2.12)
5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 14/15
Y la variable de tiempo τ varía de 0 a ∆ t i. Para simplificar algebraicamente se considera primero a un sistema sin amortiguamiento. Para este caso la ecuación a ser resuelta es:
τ i
ii
t
p puk um
∆
∆+=⋅+⋅
(2.13)
Figura 2.2 Interpolación lineal
La respuesta u( τ ) para it ∆≤≤ τ 0 es la suma de tres partes: (1) la vibración libre debido al
desplazamiento inicial ui y velocidad iu para τ =0. (2) la respuesta para la fuerza pi con
condiciones iniciales de cero. (3) la respuesta para ( ∆ pi / ∆ t i ) ·τ con condiciones inicialesde cero. Adaptando las soluciones disponibles de los párrafos precedentes para estos trescasos la respuesta total es:
( )
∆⋅
−∆
∆+−++⋅=
in
n
i
in
in
n
ini
t
sen
t k
p
k
p sen
uuu
ω
τ ω τ τ ω τ ω
ω τ ω τ cos1cos)(
Y(2.14)
)cos1(1
cos)(
τ ω ω
τ ω τ ω ω
τ ω ω
τ n
in
in
in
n
ini
n t k
p sen
k
pu senu
u−
∆⋅
∆+++⋅−=
Evaluando estas ecuaciones para τ =∆ t i proporciona el desplazamiento ui+1 y la velocidad
1+iu en el tiempo i+1:
[ ] [ ])(1
)cos(1)()cos(1 ininin
iin
iin
n
iinii t sent
t k
pt
k
pt sen
ut uu ∆⋅−∆⋅
∆⋅
∆+∆⋅−+∆⋅+∆⋅=+ ω ω
ω ω ω
ω ω
(2.15)
t
p(t )
Real
Interpolado: p(τ)
t i t i+1
pi
pi+1
∆ t i
τ

5/7/2018 diseñosismicoVIERNES - slidepdf.com
http://slidepdf.com/reader/full/disenosismicoviernes 15/15
[ ])cos(1
1)()cos()(1
inin
iin
iin
n
iini
n
i t t k
pt sen
k
pt
ut senu
u∆⋅−
∆⋅
∆+∆⋅+∆⋅+∆⋅−=+ ω
ω ω ω
ω ω
ω
Estas ecuaciones se pueden replantear después de sustituir la ecuación 2.12 como fórmulasrecurrentes:
11 ++ ⋅+⋅+⋅+⋅= iiiii p D pC u Bu Au
(2.16)
11 ++ ⋅′+⋅′+⋅′+⋅′= iiiii p D pC u Bu Au