Embed Size (px)
Citation preview
IDENTIFICACIÓN DE SISTEMASIDENTIFICACIÓN DE SISTEMAS
Ing. Fredy Ruiz [email protected]
Maestría en Ingeniería ElectrónicaPontificia Universidad JaverianaPontificia Universidad Javeriana
20132013
MÉTODOS POR SUB-ESPACIOSMÉTODOS POR SUB-ESPACIOS
Introduccion• La teoría de sistemas lineales (realizaciones de sistemas
en el espacio de estados) nace en los años 60 con Markov, Kalman, Akaike ...
• En álgebra lineal Los algoritmos de singular value decomposition (SVD) son eficientes y bien conocidos.
• En los años 90, ingenieros como De Moor, Willems, ... desarrollaron una teoría para la identificación de sistemas lineales basada en el espacio de estados y en álgebra lineal.
• Esta presentación se basa en el libro:Subspace identification for linear systemsVan Overschee- de MoorKluwer, 1996.
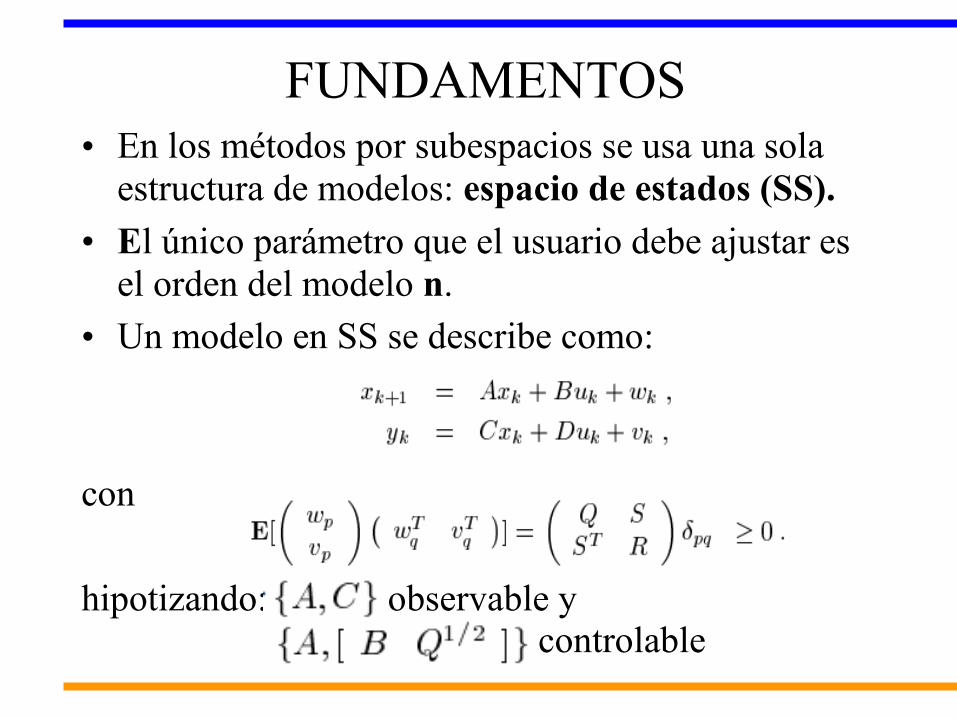
FUNDAMENTOS• En los métodos por subespacios se usa una sola
estructura de modelos: espacio de estados (SS).• El único parámetro que el usuario debe ajustar es
el orden del modelo n.• Un modelo en SS se describe como:
con
hipotizando: observable y controlable
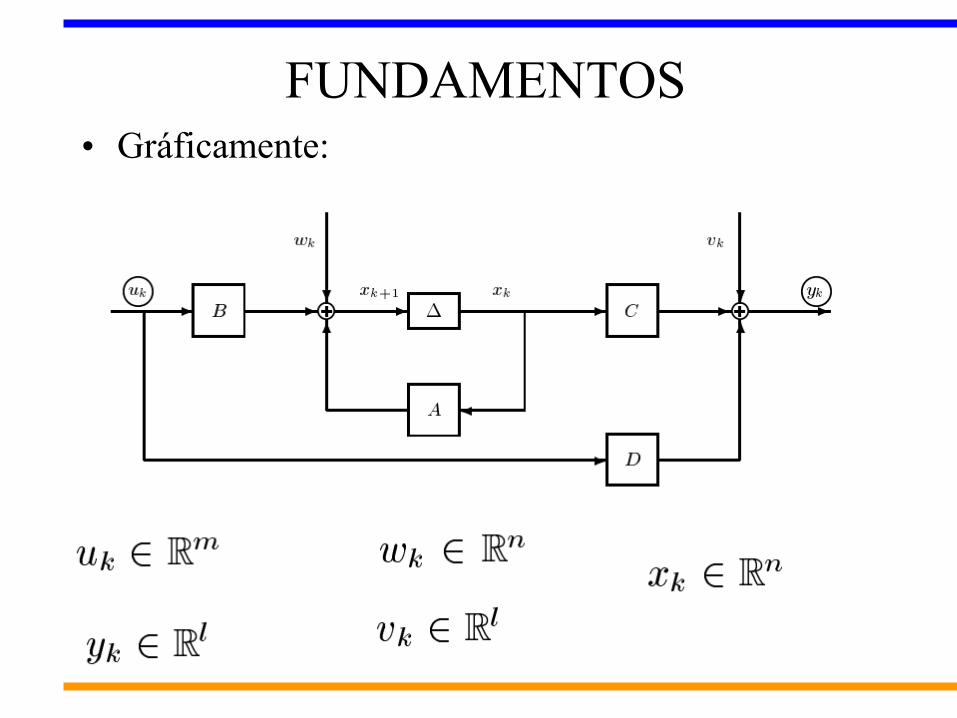
FUNDAMENTOS• Gráficamente:
Motivación
• Los métodos de identificación PEM usan una parametrización complicada, sobretodo en el caso de sistemas multivariable.
• En SS toda la dinámica del sistema esta concentrada en la matriz A, (polos del sistema, modelo de ruido, ... ).
• las técnicas modernas de diseño de sistemas de control (robusto, predictivo, etc.) consideran modelos en SS para resolver los problemas de manera eficiente.
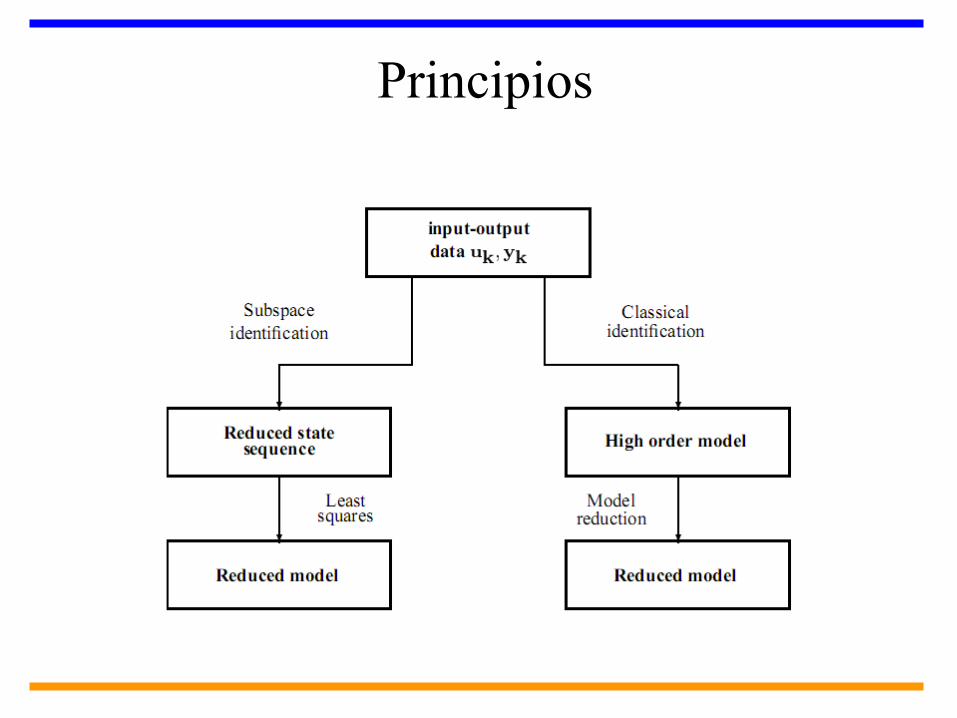
Principios• Los métodos por subespacios no usan los datos
para encontrar una relación entrada-salida
• Usando herramientas de:– Sistemas lineares– Álgebra linea– Geometría
El problema es estimar la relaciónentrada-estado-salida
Principios
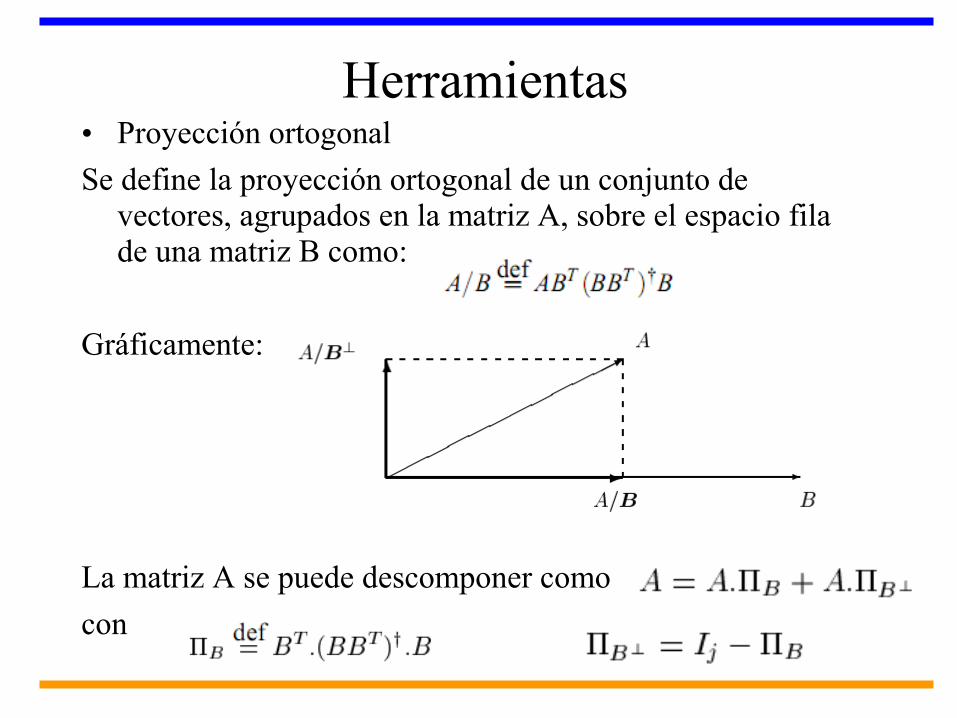
Herramientas• Proyección ortogonalSe define la proyección ortogonal de un conjunto de
vectores, agrupados en la matriz A, sobre el espacio fila de una matriz B como:
Gráficamente:
La matriz A se puede descomponer comocon
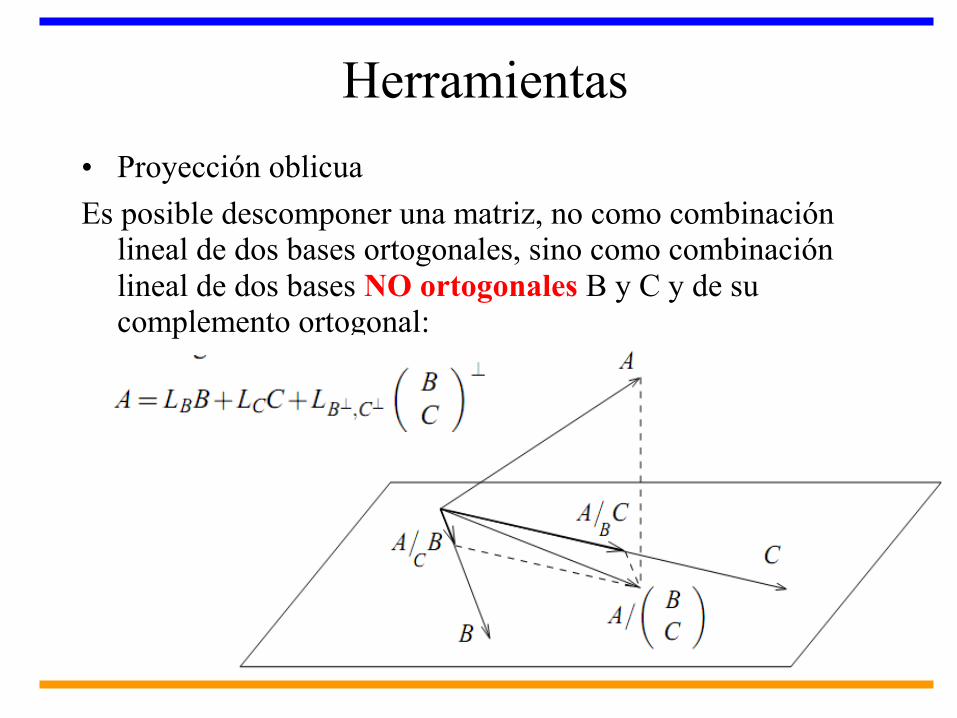
Herramientas• Proyección oblicuaEs posible descomponer una matriz, no como combinación
lineal de dos bases ortogonales, sino como combinación lineal de dos bases NO ortogonales B y C y de su complemento ortogonal:
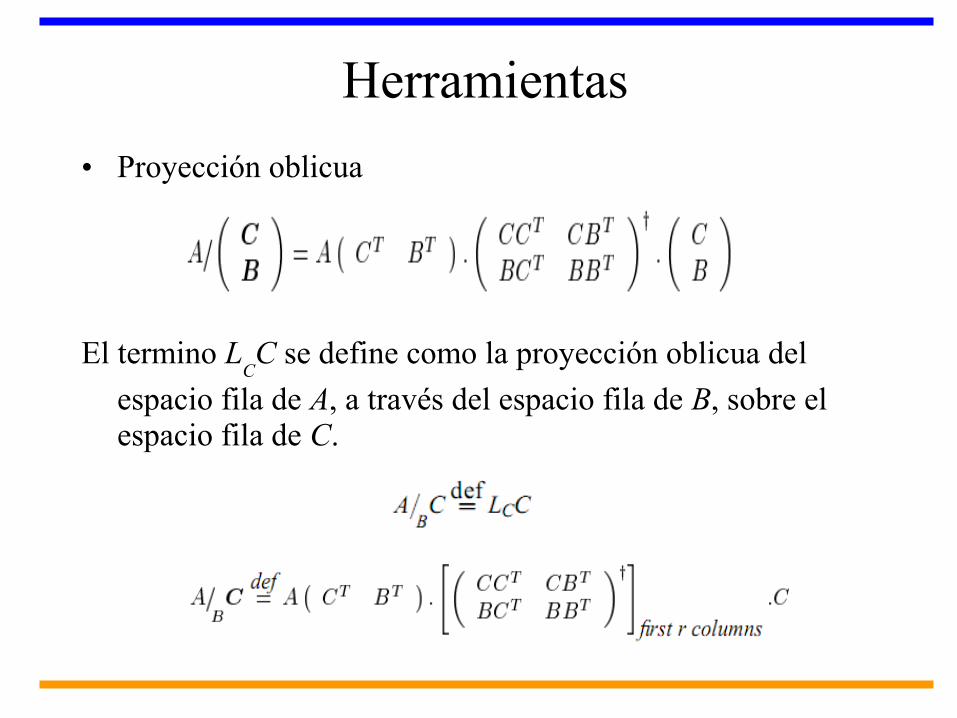
Herramientas• Proyección oblicua
El termino LCC se define como la proyección oblicua del
espacio fila de A, a través del espacio fila de B, sobre el espacio fila de C.
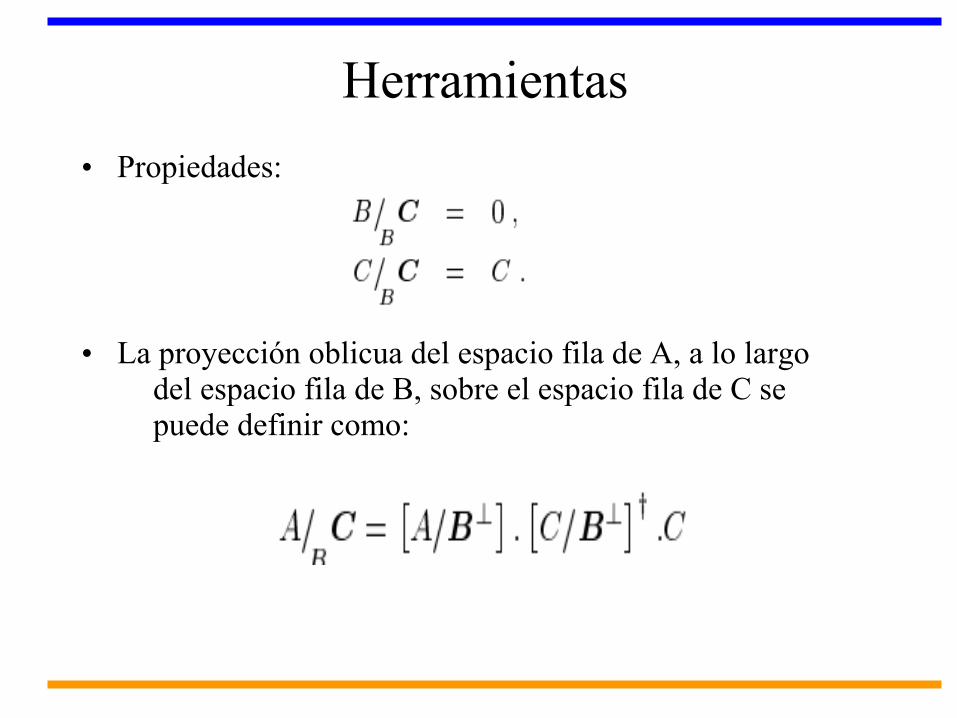
Herramientas• Propiedades:
• La proyección oblicua del espacio fila de A, a lo largo del espacio fila de B, sobre el espacio fila de C se puede definir como:
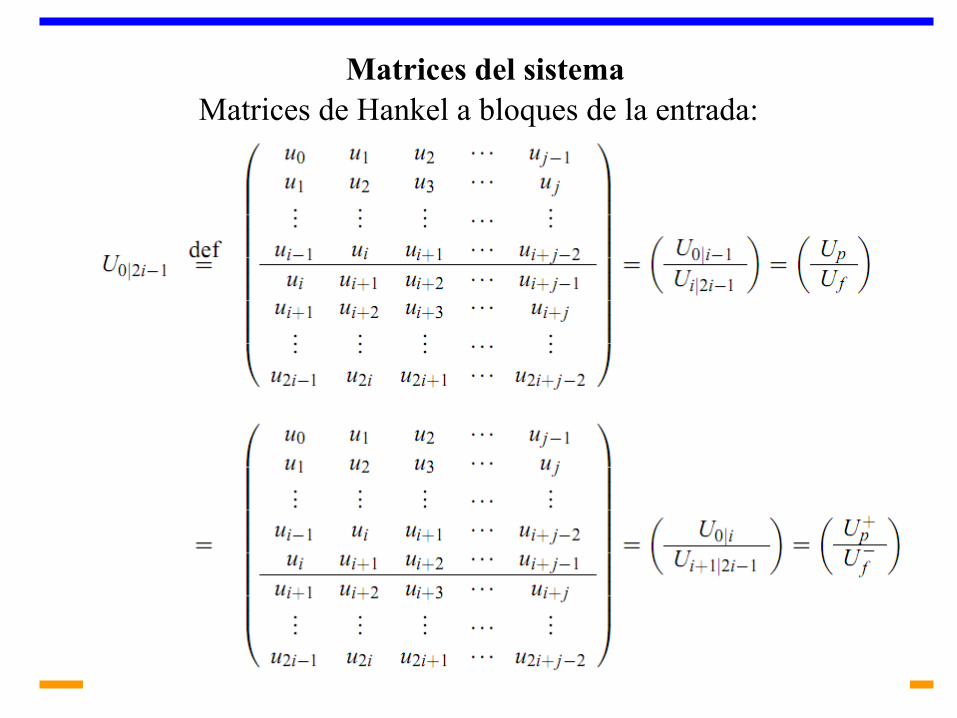
Matrices del sistemaMatrices de Hankel a bloques de la entrada:
Matrices del sistema
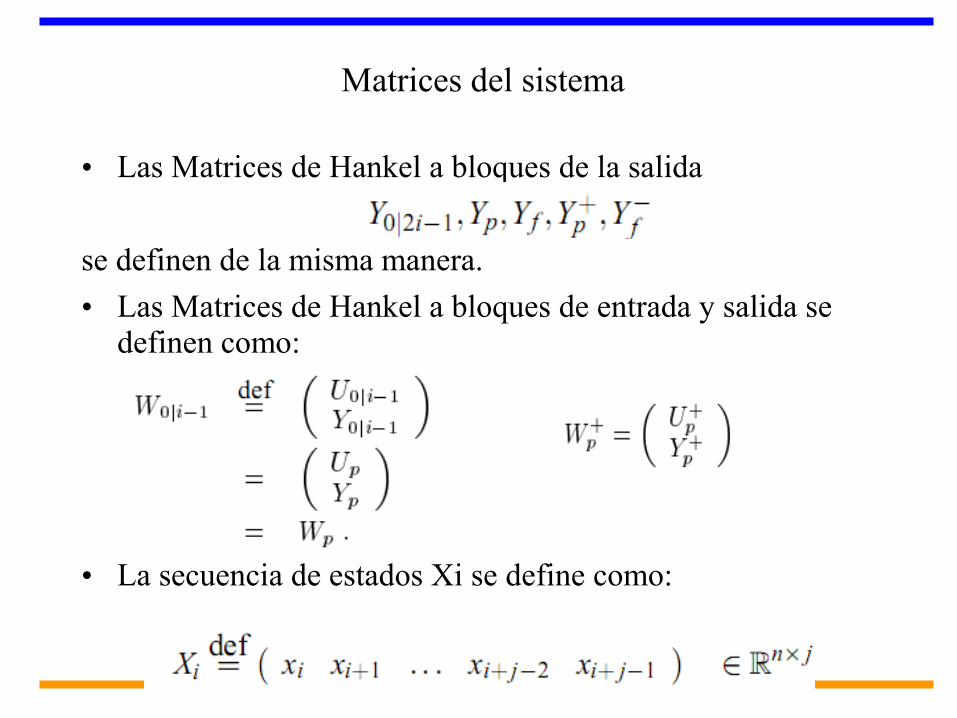
• Las Matrices de Hankel a bloques de la salida
se definen de la misma manera.• Las Matrices de Hankel a bloques de entrada y salida se
definen como:
• La secuencia de estados Xi se define como:
Matrices del sistema
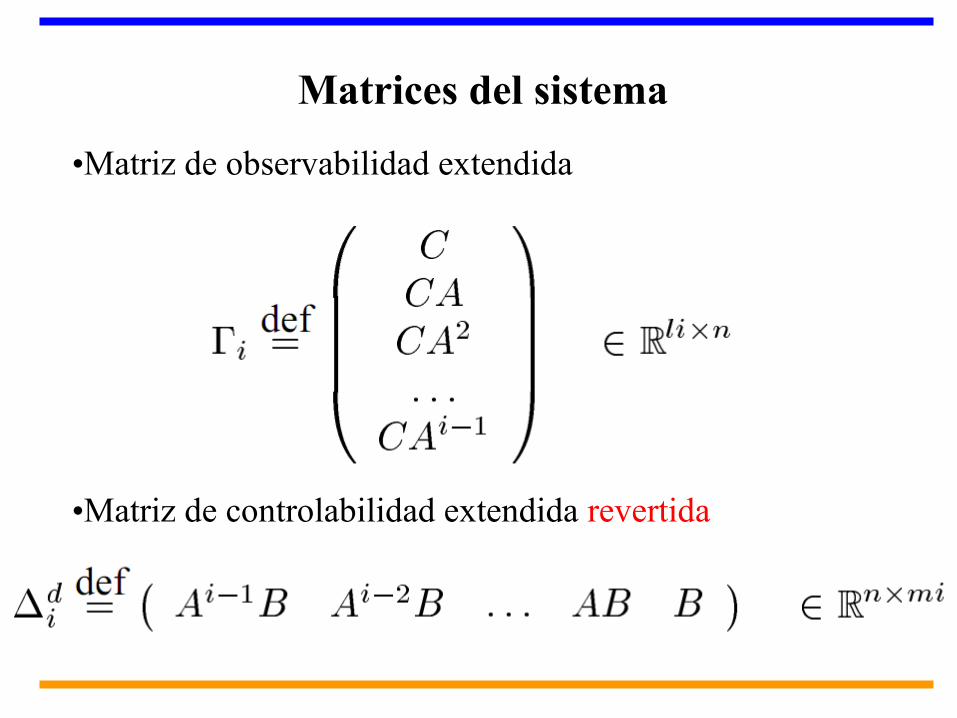
•Matriz de observabilidad extendida
•Matriz de controlabilidad extendida revertida
Matrices del sistema
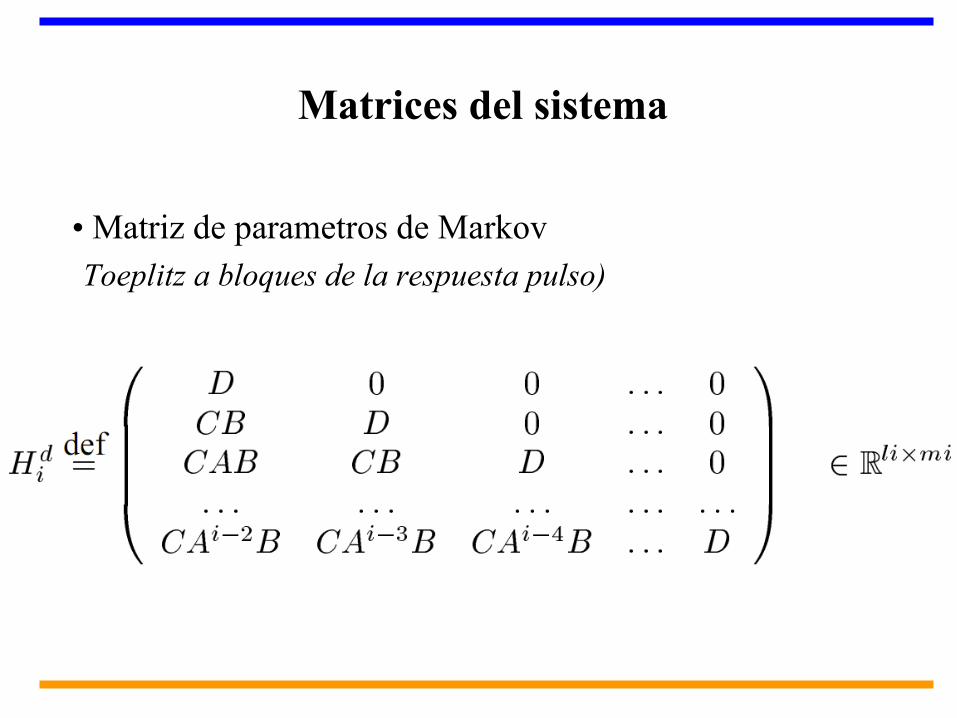
• Matriz de parametros de Markov Toeplitz a bloques de la respuesta pulso)
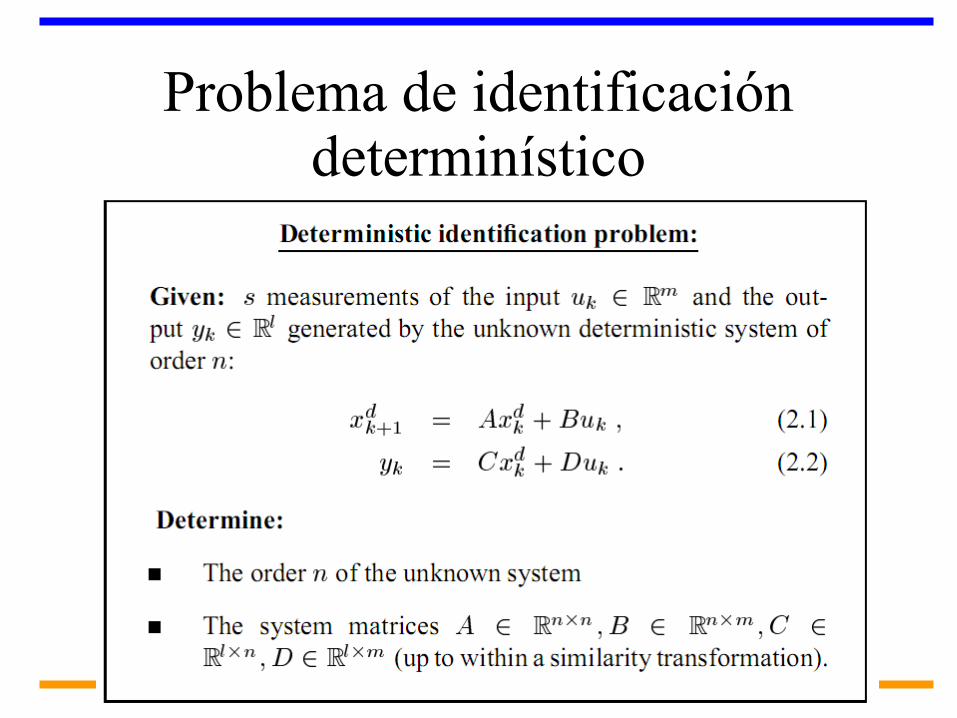
Problema de identificación determinístico
Problema de identificación deterministico
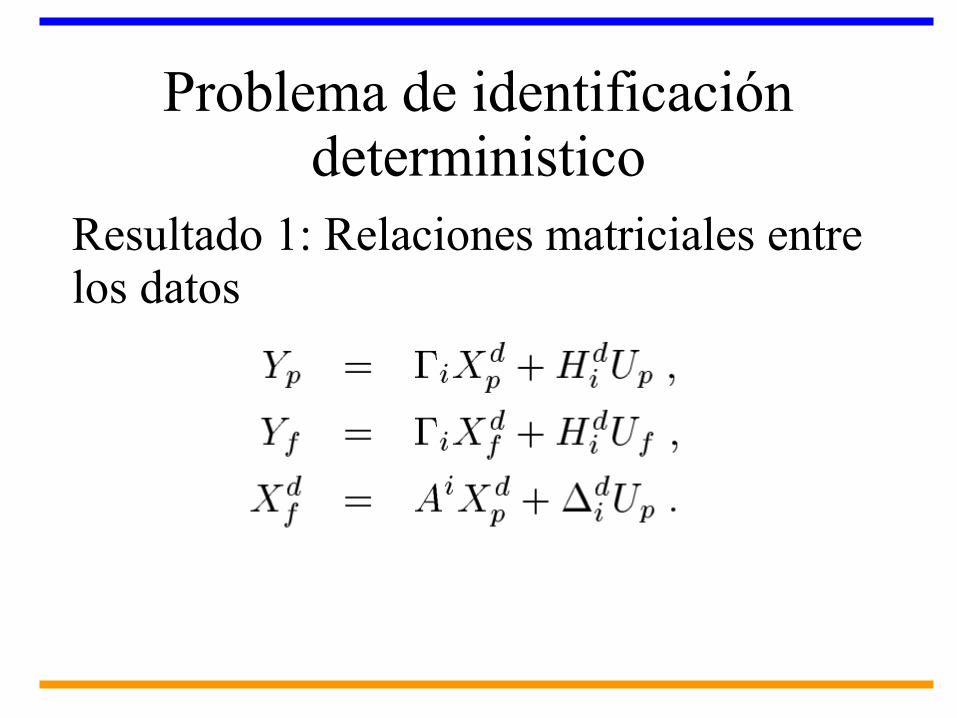
Resultado 1: Relaciones matriciales entre los datos
Problema de identificación deterministico
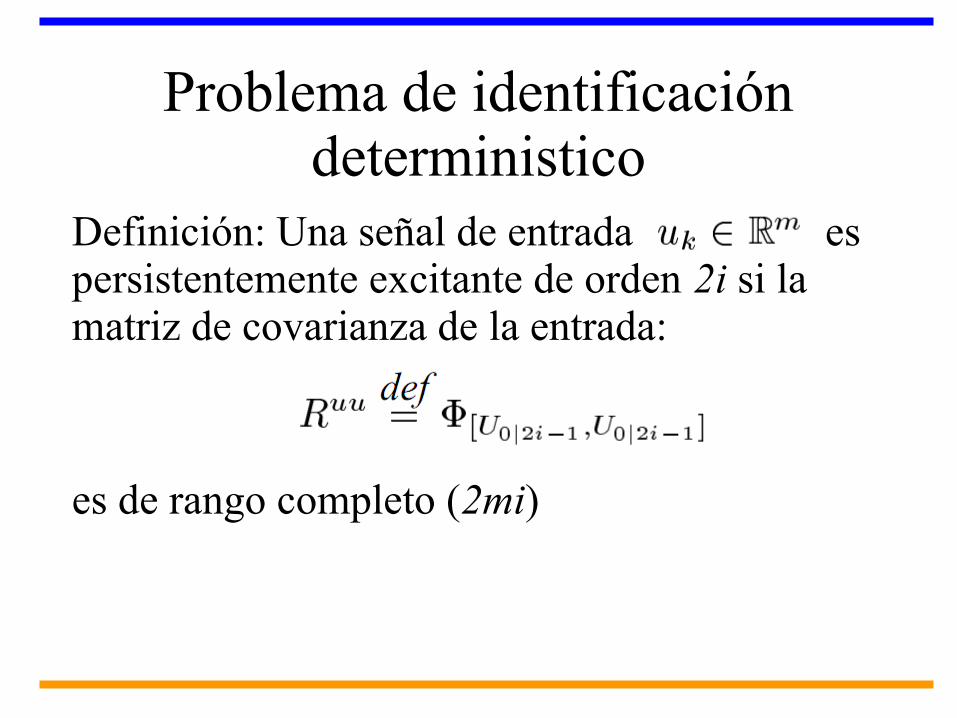
Definición: Una señal de entrada es persistentemente excitante de orden 2i si la matriz de covarianza de la entrada:
es de rango completo (2mi)
Problema de identificación deterministico
Resultado 2: Suposiciones• u es persistentemente excitante• La intersección entre el espacio fila de y el espacio fila de es vacío. ¿Qué significa esto?

Problema de identificación deterministico
Resultado 2: Definiciones
Para adecuadas matrices T, W1 y W2, la matriz tiene la siguiente descomposición:
Problema de identificación deterministico
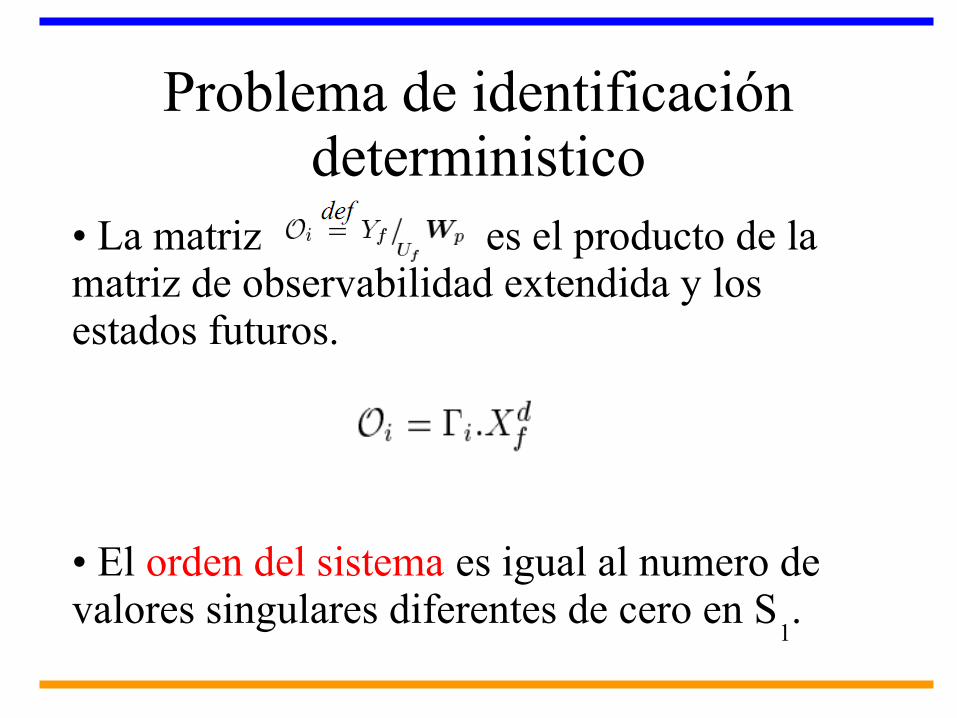
• La matriz es el producto de la matriz de observabilidad extendida y los estados futuros.
• El orden del sistema es igual al numero de valores singulares diferentes de cero en S
1.
Problema de identificación deterministico
• La matriz de observabilidad extendida es:
• La parte de la secuencia de estados que cae sobre el espacio columna de W2 se puede recuperar de:
Problema de identificación deterministico
• La secuencia de estados es igual a:
• IMPORTANTE: Es posible recuperar la secuencia de estados usando solamente datos de entrada-salida.
Problema de identificación deterministico
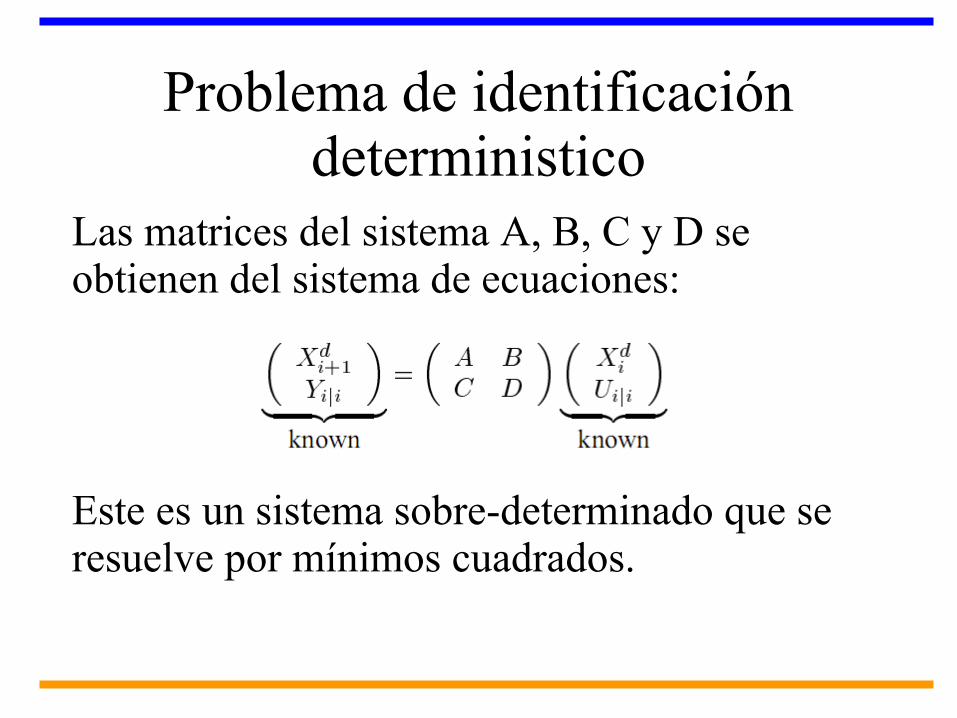
Las matrices del sistema A, B, C y D se obtienen del sistema de ecuaciones:
Este es un sistema sobre-determinado que se resuelve por mínimos cuadrados.
Problema de identificación deterministico
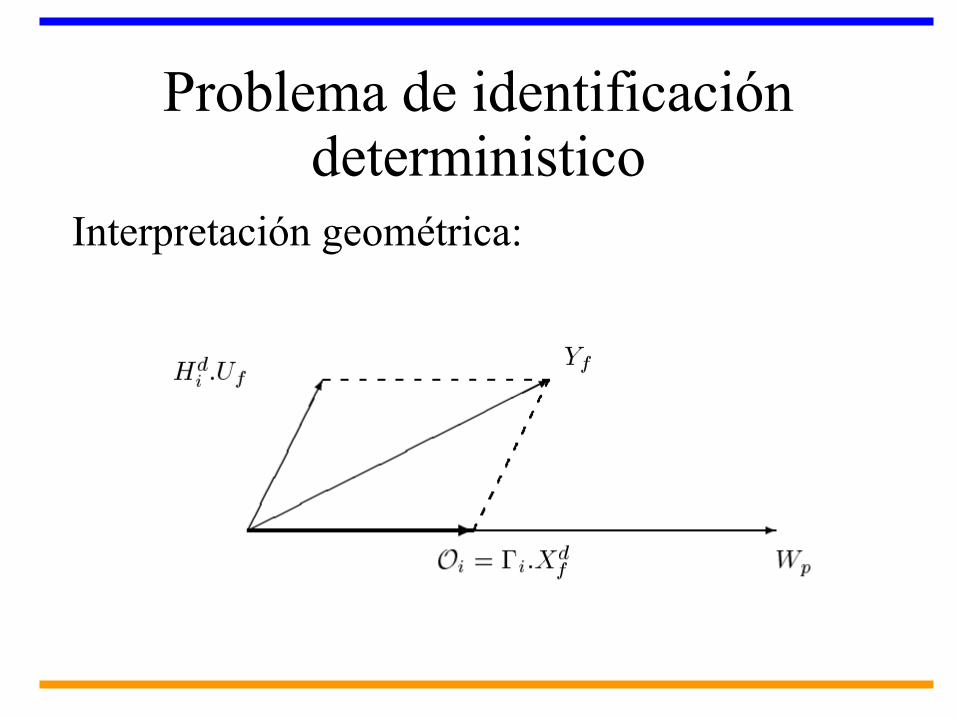
Interpretación geométrica:
Problema de identificación deterministico
Las matrices del sistema A, B, C y D se obtienen del sistema de ecuaciones:
Este es un sistema sobre-determinado que se resuelve por mínimos cuadrados.
Problema de identificación deterministico
Problema de identificación deterministico
Problema de identificación deterministico
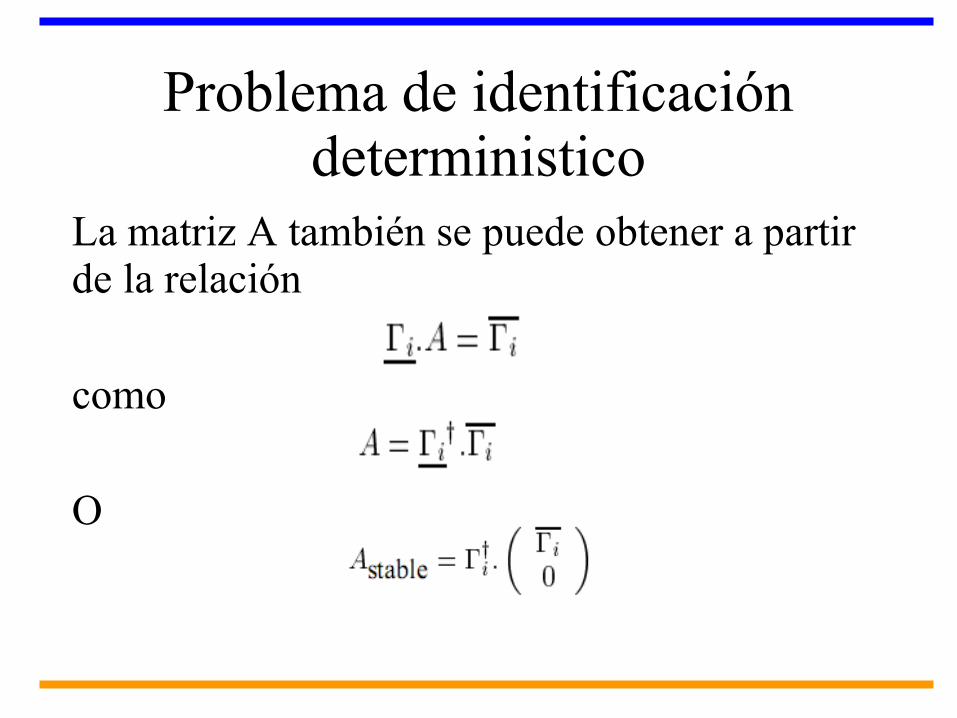
La matriz A también se puede obtener a partir de la relación
como
O
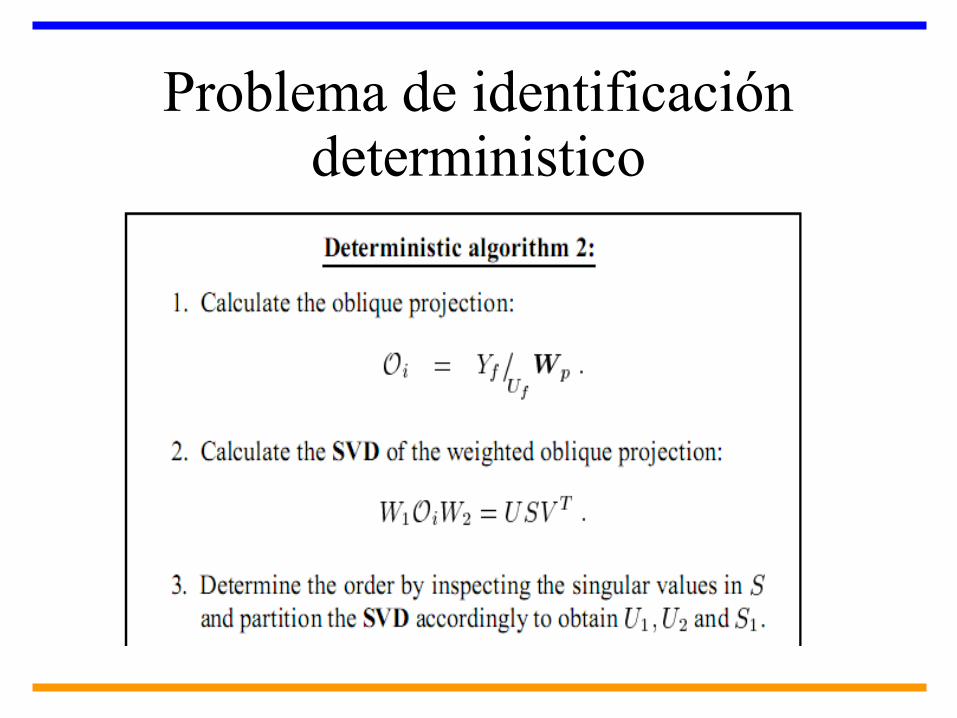
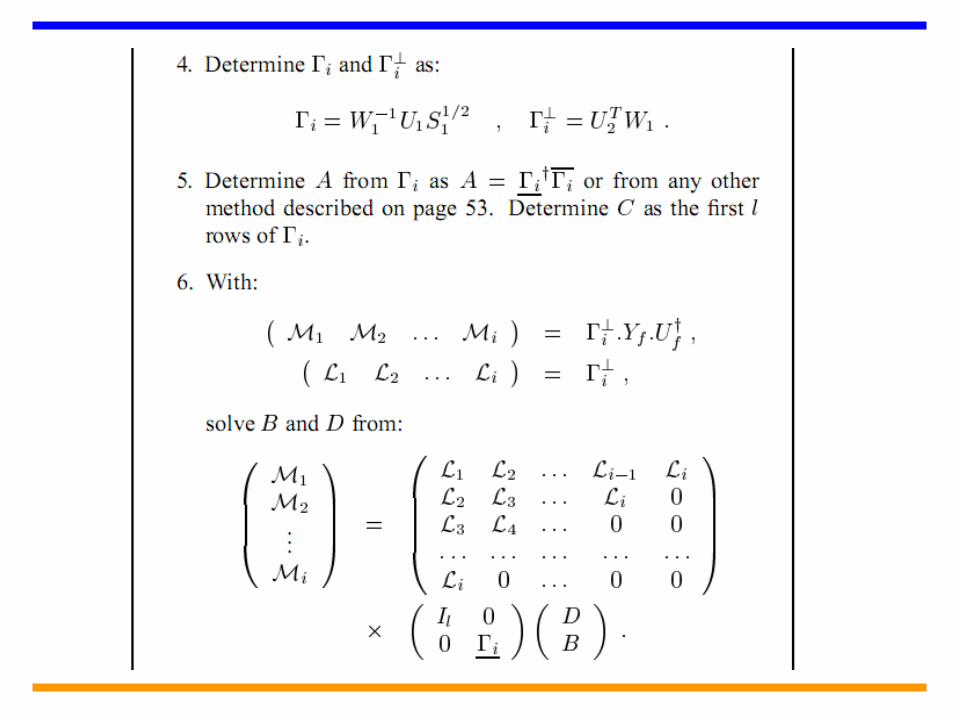
Problema de identificación deterministico
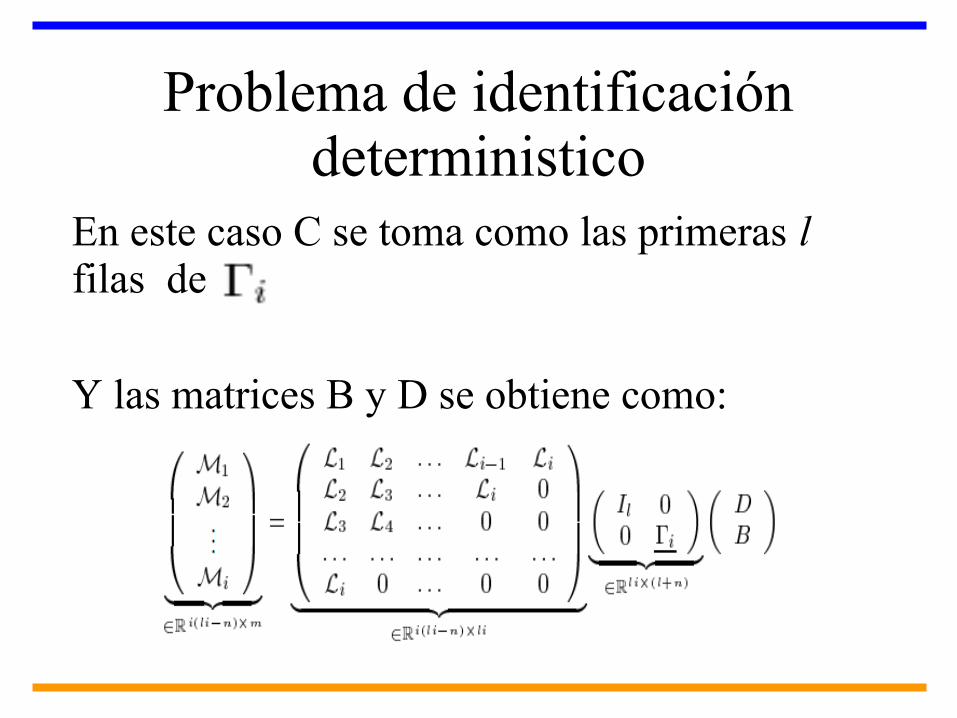
En este caso C se toma como las primeras l filas de
Y las matrices B y D se obtiene como:
Problema de identificación deterministico
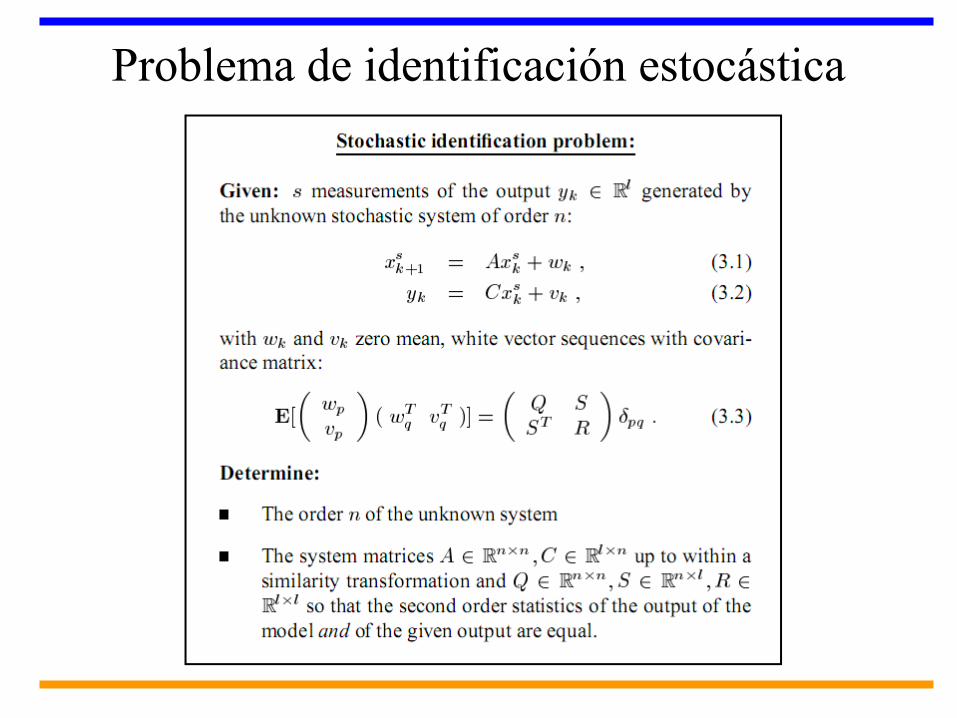
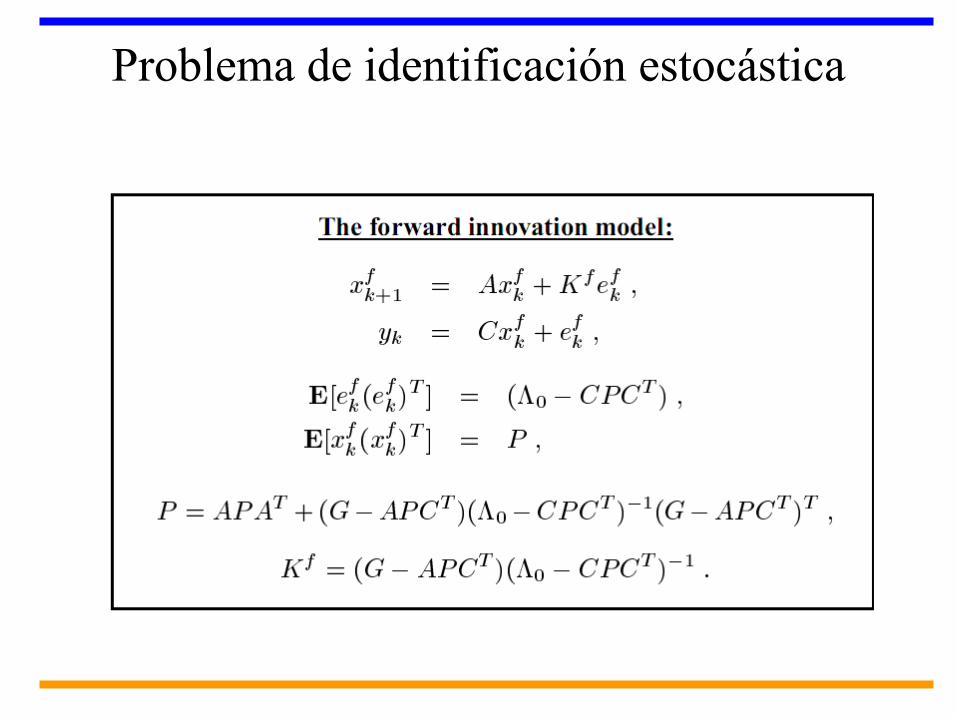
Problema de identificación estocástica
Problema de identificación estocástica• Se presenta un problema en el caso de identificación
estocástica, existen infinitas realizaciones de sistemas LTI en SS equivalentes, es decir con las mismas propiedades estadísticas de primer y segundo orden.– Forward – Backward– Innovación hacia adelante (Kalman)– Innovación hacia atrás
Todas estas y otras realizaciones producen la misma función de auto-correlación para y.
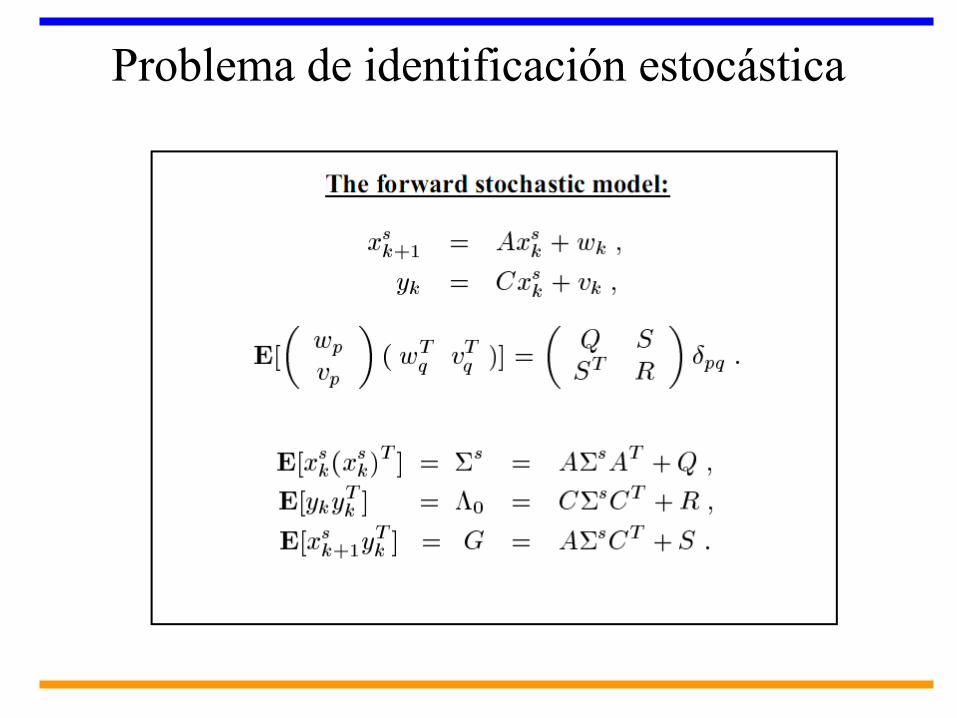
Problema de identificación estocástica
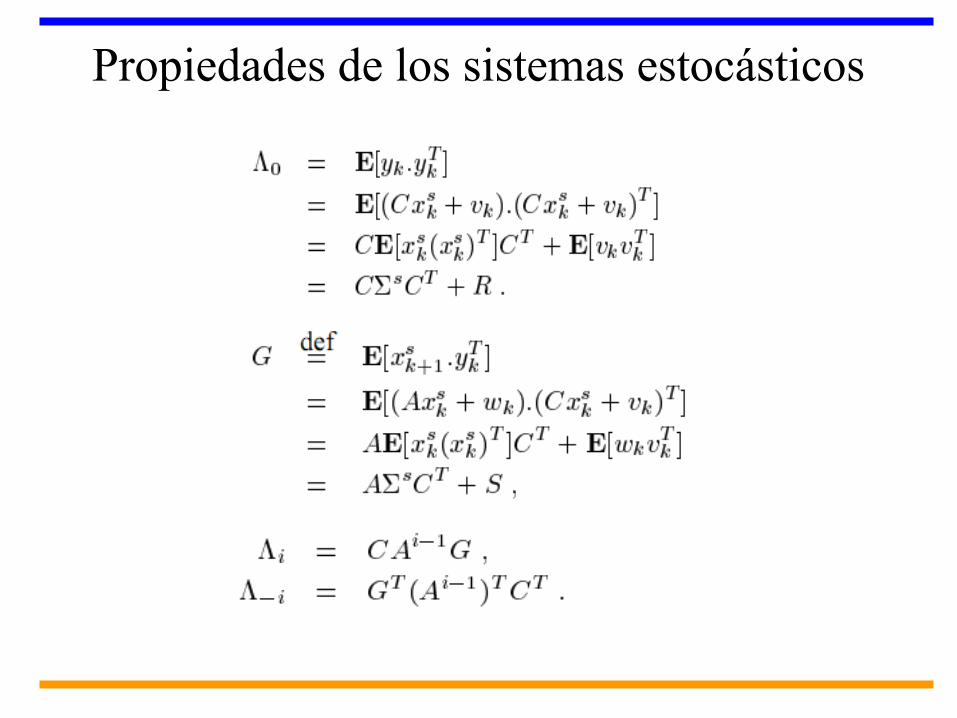
Propiedades de los sistemas estocásticos
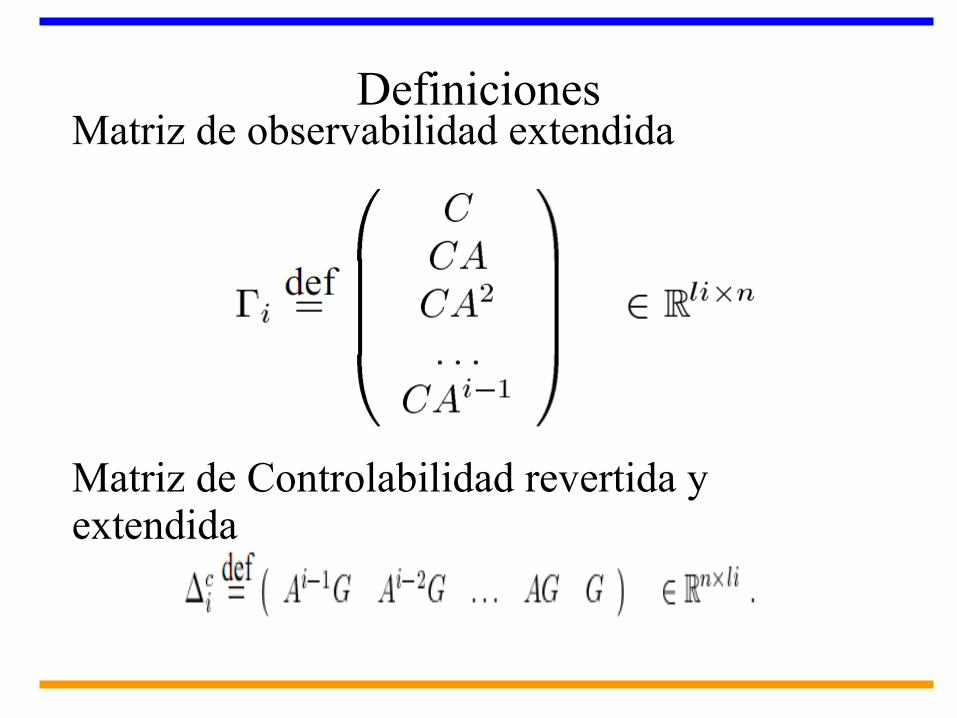
DefinicionesMatriz de observabilidad extendida
Matriz de Controlabilidad revertida y extendida
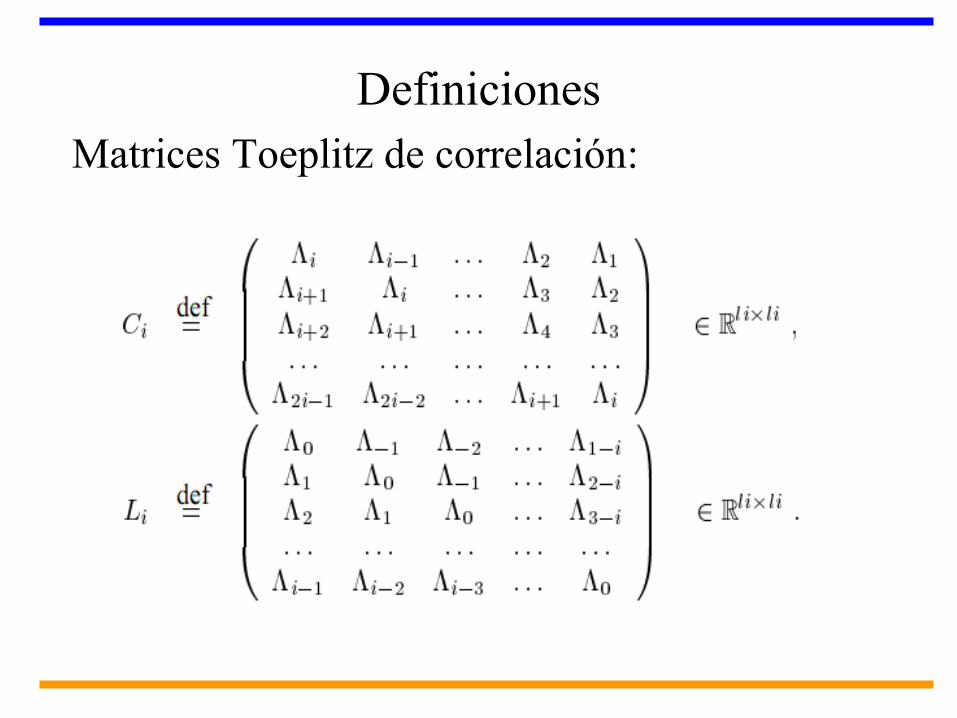
DefinicionesMatrices Toeplitz de correlación:

Definiciones
Matrices Toeplitz de correlaciónTeniendo en cuenta que:
Resulta
Problema de identificación estocástica
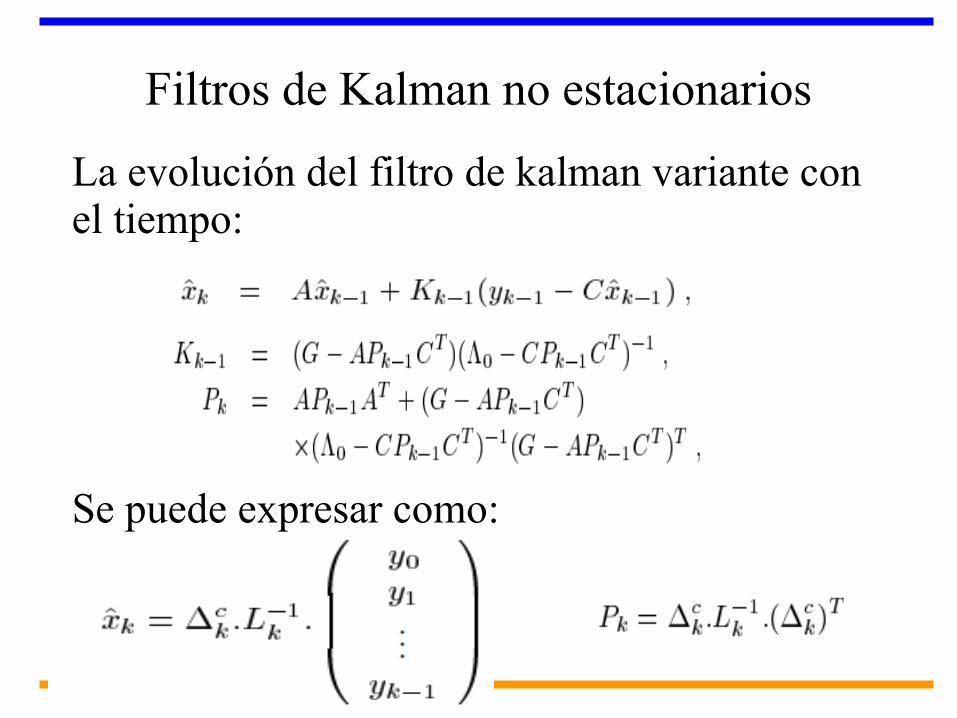
Filtros de Kalman no estacionarios
La evolución del filtro de kalman variante con el tiempo:
Se puede expresar como:
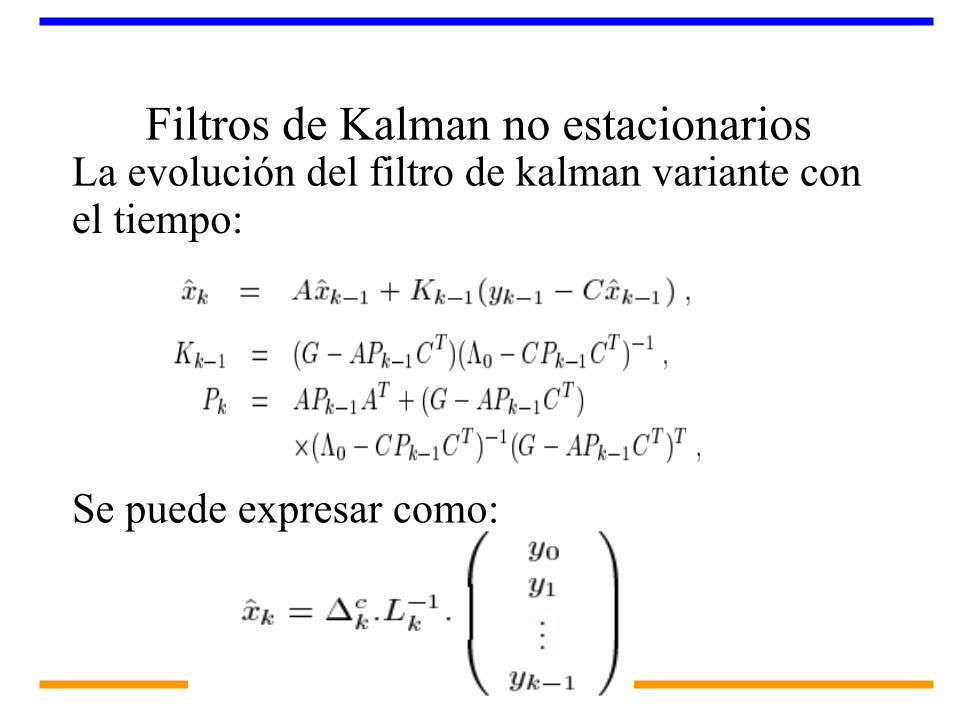
Filtros de Kalman no estacionariosLa evolución del filtro de kalman variante con el tiempo:
Se puede expresar como:
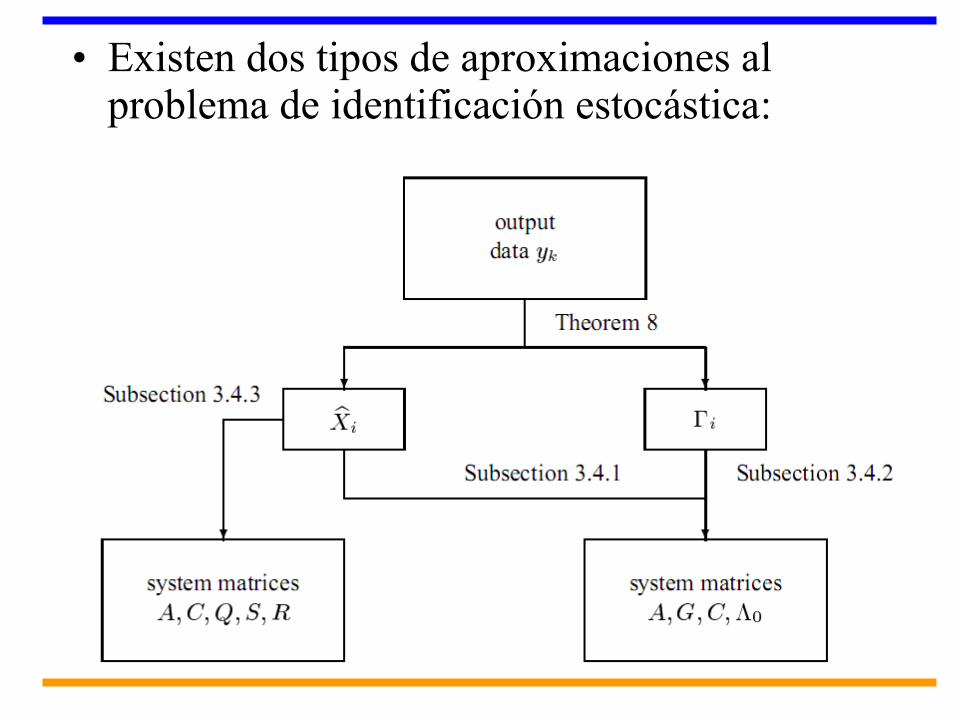
• Existen dos tipos de aproximaciones al problema de identificación estocástica:
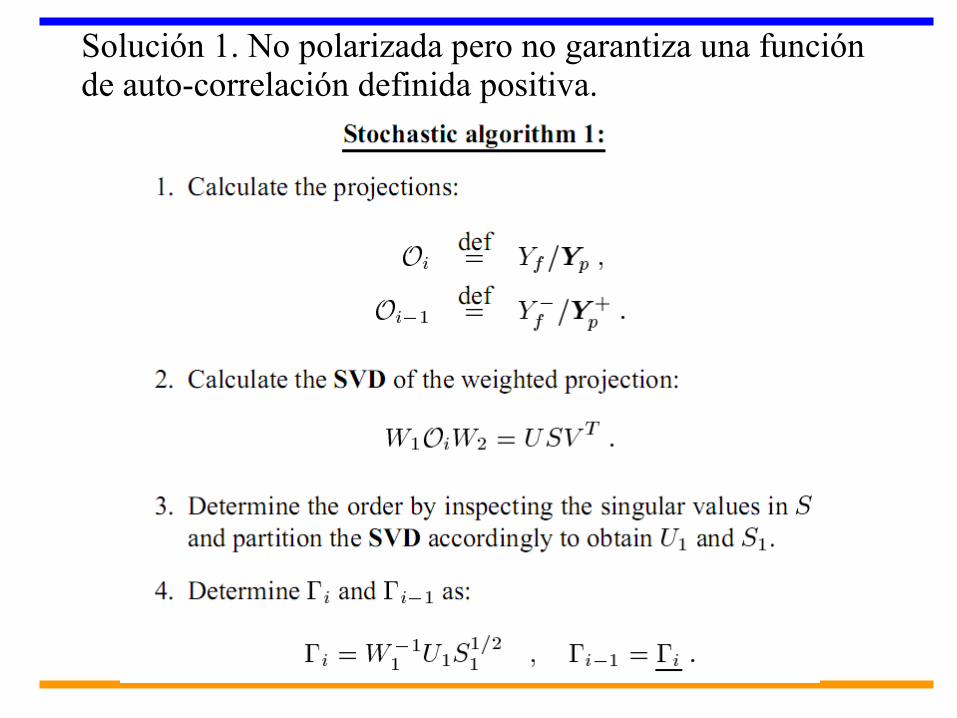
Solución 1. No polarizada pero no garantiza una función de auto-correlación definida positiva.
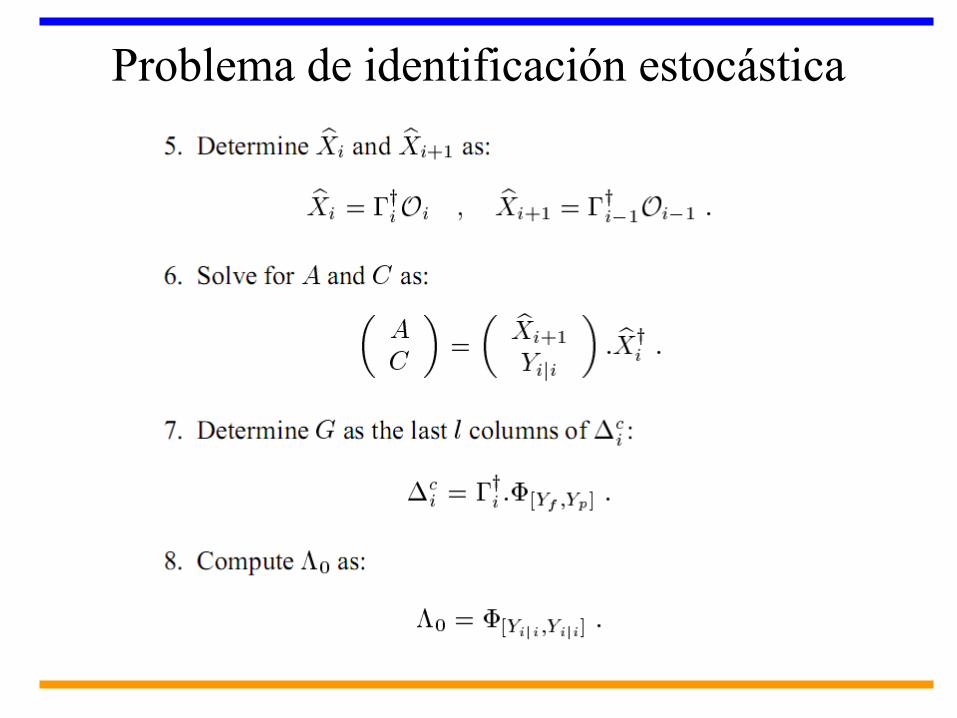
Problema de identificación estocástica
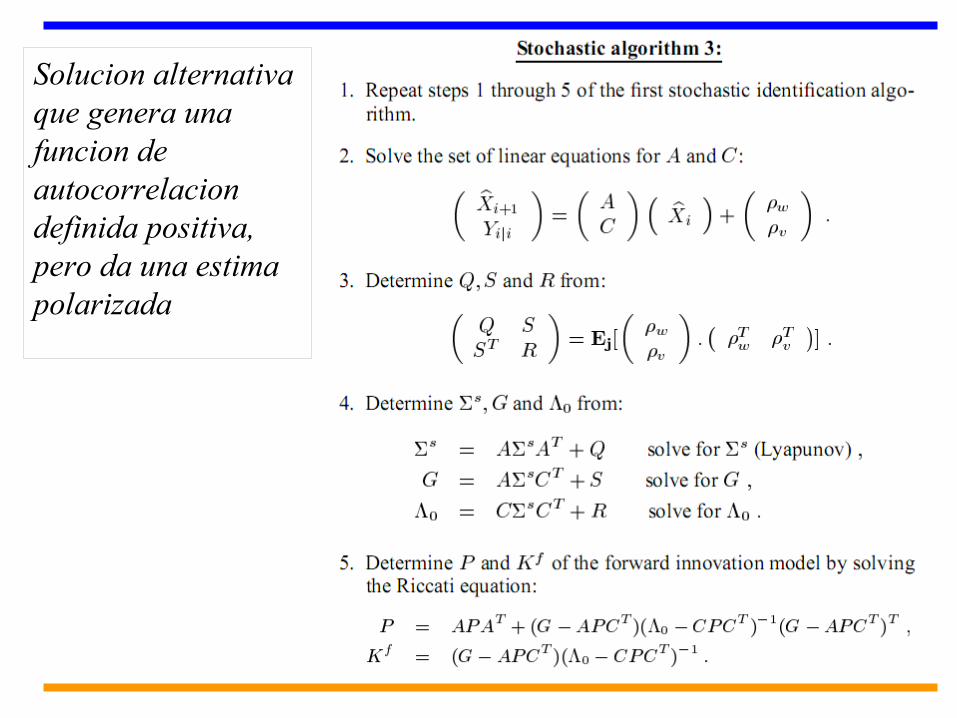
Solucion alternativa que genera una funcion de autocorrelacion definida positiva, pero da una estima polarizada
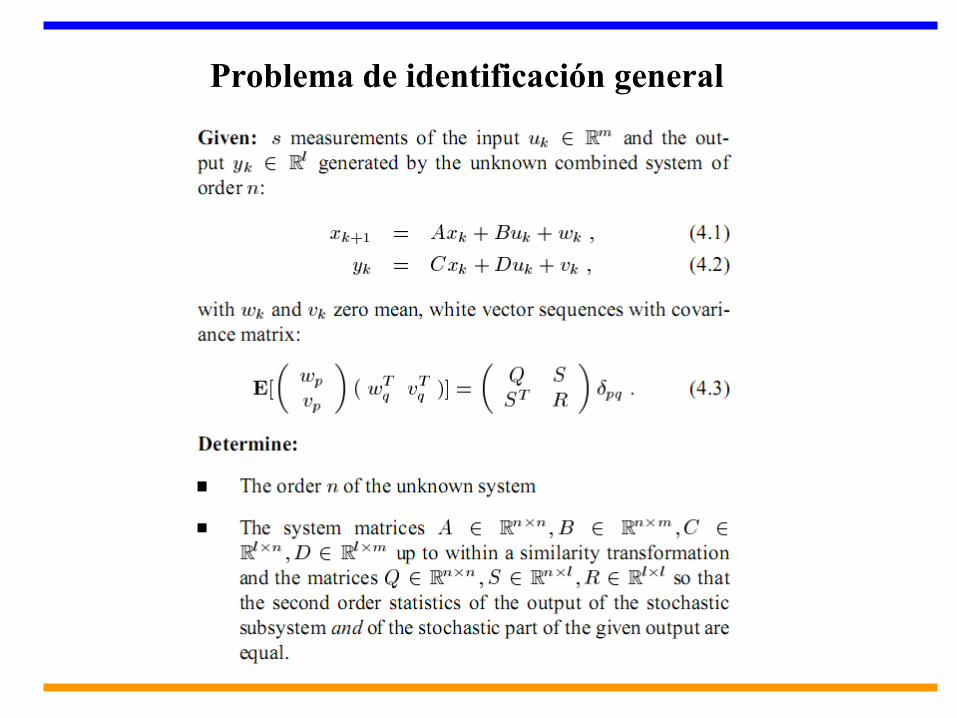
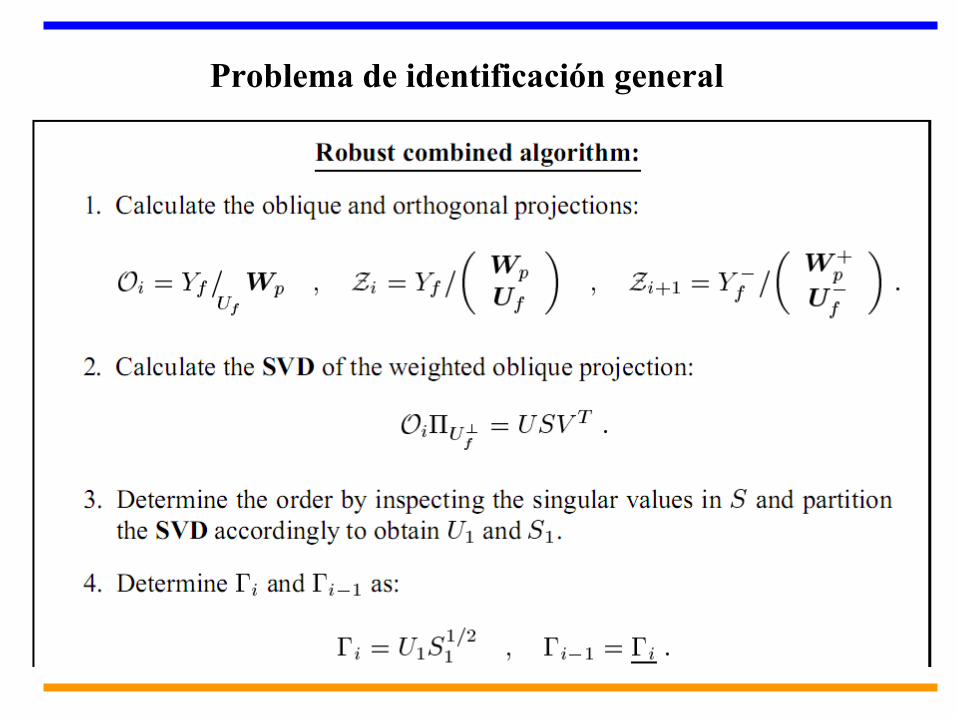
Problema de identificación general
Problema de identificación general
• Combinando los resultados de identificación deterministica y estocástica, es posible resolver el problema general.
• La complejidad de los algoritmos es similar a la de los casos anteriores.
• Los algoritmos
Problema de identificación general
Problema de identificación general
Problema de identificación general
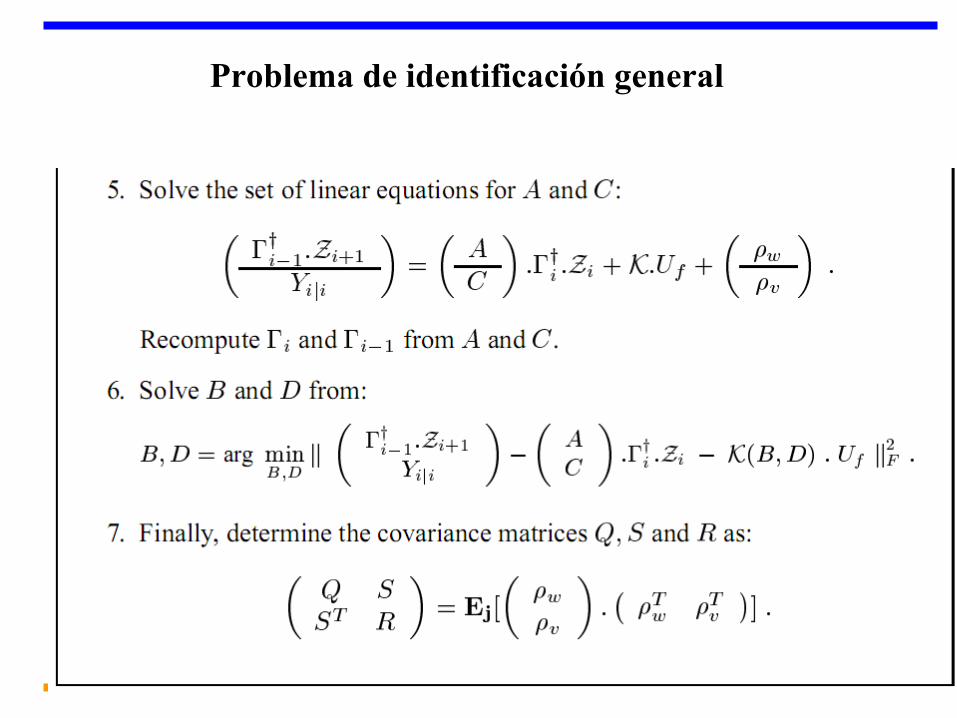
Problema de identificación general
Conclusiones
• Los métodos por subespacios son particularmente útiles en la identificación de sistemas multivariable, evitando la parametrización
• No requieren la solución de problemas de optimización no lineales-no convexos
• La literatura muestra que funcionan en la práctica.
Conclusiones
• No es claro que función de costo se minimiza (tipo maximum likelihook)
• Aun existen “huecos” en la teoría estocástica para demostrar eficiencia, consistencia y obtener expresiones de la varianza de la estima.
• Actualmente el toolbox de Matlab utiliza estos métodos para estimar un punto inicial necesario en la optimización no convexa de la rutina PEM.





























