Universidad Nacional de Lojarea de la Energa, las Industrias y
los Recursos Naturales No Renovables CARRERA DE INGENIERA EN
ELECTRNICA Y TELECOMUNICACIONES
PRACTICAS DE ELECTRNICA DIGITAL1.- DATOS GENERALES Integrantes:
Manuel Tuza Xavier Gualn Practica No: Fecha: Docente: 2.- DATOS DE
LA PRCTICA NOMBRE: OBJETIVOS: CONTROL DE MOTORES A PASO UNIPOLARES
Y BIPOLARES CON FLIP FLOPS. 5 13 de junio de 2012 Ing. Diego
Orellana
Disear un controlador para un motor de paso bipolar y un motor
de paso unipolar con flip-Flops y compuertas. Utilizar los
conocimientos adquiridos para formular un diseo sistemtico
combinatorio. Disear y usar amplificadores de corriente utilizando
nicamente transistores para controlar los motores. Para el motor
bipolar disear un amplificador de corriente H-
Bridge.
3.- MARCO TEORICOMOTORES PASO A PASO (STEPPER MOTORS)
Los motores paso a paso son ideales para la construccin de
mecanismos en donde se requieren movimientos muy precisos. La
caracterstica principal de estos motores es el hecho de poder
moverlos un paso a la vez por cada pulso que se le aplique. Este
paso puede variar desde 90 hasta pequeos movimientos de tan solo
1.8, es decir, que se necesitarn 4 pasos en el primer caso (90) y
200 para el segundo caso (1.8), para completar un giro completo de
360.
Estos motores poseen la habilidad de poder quedar enclavados en
una posicin o bien totalmente libres. Si una o ms de sus bobinas
est energizada, el motor estar enclavado en la posicin
correspondiente y por el contrario quedar completamente libre si no
circula corriente por ninguna de sus bobinas.
Principio de funcionamientoBsicamente estos motores estn
constituidos normalmente por un rotor sobre el que van aplicados
distintos imanes permanentes y por un cierto nmero de bobinas
excitadoras bobinadas en su estator. Las bobinas son parte del
estator y el rotor es un imn permanente. Toda la conmutacin (o
excitacin de las bobinas) deber ser externamente manejada por un
controlador.
Fig 1.
Imagen del rotor
Fig 2. Imagen de un estator de 4 bobinas
MOTORES PASO A PASO BIPOLARES
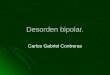
Figura 3. Esquema de un motor de paso biplar Estos tiene
generalmente cuatro cables de salida (ver figura 3). Necesitan
ciertos trucos para ser controlados, debido a que requieren del
cambio de direccin del flujo de corriente a travs de las bobinas en
la secuencia apropiada para realizar un movimiento. En figura 4
podemos apreciar un ejemplo de control de estos motores mediante el
uso de un puente en
H (H-Bridge). Como se aprecia, ser necesario un H-Bridge por
cada bobina del motor, es decir que para controlar un motor Paso a
Paso de 4 cables (dos bobinas), necesitaremos usar dos H-Bridges
iguales al de la figura 3. El circuito de la figura 3 es a modo
ilustrativo y no corresponde con exactitud a un H-Bridge.
SECUENCIAS PARA MANEJAR MOTORES PASO A PASO BIPOLARES Como se
dijo anteriormente, estos motores necesitan la inversin de la
corriente que circula en sus bobinas en una secuencia determinada.
Cada inversin de la polaridad provoca el movimiento del eje en un
paso, cuyo sentido de giro est determinado por la secuencia
seguida. A continuacin se puede ver la tabla con la secuencia
necesaria para controlar motores paso a paso del tipo Bipolares:
PASO 1 2 3 4 TERMINALES A B C +V -V +V +V -V -V -V +V -V -V +V
+V
D -V +V +V -V
MOTORES PASO A PASO UNIPOLARES Estos motores suelen tener 6 o 5
cables de salida, dependiendo de su conexionado interno (ver figura
2). Este tipo se caracteriza por ser ms simple de controlar. En la
figura 4 podemos apreciar un ejemplo de conexionado para controlar
un motor paso a paso unipolar mediante el uso de un ULN2803, el
cual es una array de 8 transistores tipo Darlington capaces de
manejar cargas de hasta 500mA. Las entradas de activacin (Activa A,
B , C y D) pueden ser directamente activadas por un
microcontrolador.
SECUENCIAS PARA MANEJAR MOTORES PASO A PASO UNIPOLARES Existen
tres secuencias posibles para este tipo de motores, las cuales se
detallan a continuacin. Todas las secuencias comienzan nuevamente
por el paso 1 una vez alcanzado el paso final (4 u 8). Para
revertir el sentido de giro, simplemente se deben ejecutar las
secuencias en modo inverso. Secuencia Normal: Esta es la secuencia
ms usada y la que generalmente recomienda el fabricante. Con esta
secuencia el motor avanza un paso por vez y debido a que siempre
hay al menos dos bobinas activadas, se obtiene un alto torque de
paso y de retencin. PASO 1 2 3 4 Bobina A ON OFF OFF ON Bobina B ON
ON OFF OFF Bobina C OFF ON ON OFF Bobina D OFF OFF ON ON
Secuencia del tipo wave drive: En esta secuencia se activa solo
una bobina a la vez. En algunos motores esto brinda un
funcionamiento ms suave. La contrapartida es que al estar solo una
bobina activada, el torque de paso y retencin es menor.
PASO Bobina A 1 2 3 4 ON OFF OFF OFF
Bobina B OFF ON OFF OFF
Bobina C OFF OFF ON OFF
Bobina D OFF OFF OFF ON
Secuencia del tipo medio paso: En esta secuencia se activan las
bobinas de tal forma de brindar un movimiento igual a la mitad del
paso real. Para ello se activan primero 2 bobinas y luego solo 1 y
as sucesivamente. Como vemos en la tabla la secuencia completa
consta de 8 movimientos en lugar de 4. PASO 1 2 3 4 5 6 7 8 Bobina
A ON ON OFF OFF OFF OFF OFF ON Bobina B OFF ON ON ON OFF OFF OFF
OFF Bobina C OFF OFF OFF ON ON ON OFF OFF Bobina D OFF OFF OFF OFF
OFF ON ON ON
Como comentario final, cabe destacar que debido a que los
motores paso a paso son dispositivos mecnicos y como tal deben
vencer ciertas inercias, el tiempo de duracin y la frecuencia de
los pulsos aplicados es un punto muy importante a tener en cuenta.
En tal sentido el motor debe alcanzar el paso antes que la prxima
secuencia de pulsos comience. Si la frecuencia de pulsos es muy
elevada, el motor puede reaccionar en alguna de las siguientes
formas:
Puede que no realice ningn movimiento en absoluto. Puede
comenzar a vibrar pero sin llegar a girar. Puede girar
errticamente. O puede llegar a girar en sentido opuesto.
Para obtener un arranque suave y preciso, es recomendable
comenzar con una frecuencia de pulso baja y gradualmente ir
aumentndola hasta la velocidad deseada sin superar la mxima
tolerada. El giro en reversa debera tambin ser realizado
previamente bajando la velocidad de giro y luego cambiar el sentido
de rotacin.
4.- SIMULACION a. Diseo del controlador para un motor de paso
bipolar. Para diseo se sigue la sguete secuencia.
PASO 1 2 3 4D= entrada de control B= Flip Flop B A=Flip -Flop
A
A +V +V -V -V
TERMINALES A B B -V +V -V -V -V +V +V -V +V +V +V -V
Cuando D=0, Para el giro en sentido horario BA, tiene que seguir
la siguiente secuencia
11-10 - 00 01Cuando D=1, Para el giro en sentido anti horario
BA, tiene que seguir la siguiente secuencia
0100 - 10 11 Tabla de verdad para los estados presentes y
siguientesCONTROL D 0 0 1 0 2 0 3 0 4 1 5 1 6 1 7 1 PRESENTE B A 0
0 0 1 1 0 1 1 0 0 0 1 1 0 1 1 SIGUIENTE B A 0 1 1 1 0 0 1 0 1 0 0 0
1 1 0 1 CONTROL DE FLIP -FLOPS JB KB JA 0 X 1 1 X X X 1 0 X 0 X 1 X
0 0 X X X 0 1 X 1 X
KA x 0 x 1 x 1 x 0
Reduciendo las ecuaciones para cada entrada: JB=DA+DA JB=D A
KB=DA+DA KB=(D+A) JA=DB+DB JA=(D B) KA=DB+DB KA=(D B) SIMULACION
DEL CIRCUITOVCC 5V
R1 15% 2k Key=A U3A C1 7414N 100F4 1J 1CLK 1K
2 ~1PR 1Q
U1A15
U6A U4A9 6 12 2J 2CLK 2K
7 ~2PR 2Q
U2B U5B11
U6B 7404N R2 220 VCC 5V R3 1k
1 16
~1Q ~1CLR 3
14
~2Q ~2CLR
10
7476N
8
7476N
LED1
R4 220
R6 220
R5 220
R7 220
LED2
LED4
LED3
LED5
Para que el motor funcione, se requiere amplificar la corriente
las salidas del flipflop para lo cual los acoplamos un puente
H.
Los transistores ponemos el TIP120 Caractersticas: Imax=5A
V=3-50V A las entradas de cada transistor colocamos resistencias de
2.2K. Los diodos sirven para la proteccin del circuito, en este
caso se puso 1N1007, estos soportan intensidades de hasta 5.
SIMULACIN DEL CIRCUITO ACOPLADO EL PUENTE H.
b. DISEO DE UN MOTOR A PASOS UNIPOLAR Para este diseo se escogi
la siguiente secuencia para el giro normal .
PASO Bobina A 1 2 3 4 ON OFF OFF OFF
Bobina B OFF ON OFF OFF
Bobina C OFF OFF ON OFF
Bobina D OFF OFF OFF ON
Para el sentido anti horario la secuencia va a ser al
contrario.Se requieren de 5 FLIP-FLOS, 1 para cada bobina y un 5to
para el control del motor. TABLA DE ESTADO PRESENTE Y SIGUIENTE
PRESENTE SIGUIENTE CONTROL DE FLIP -FLOPS D C B A D C B A JD KD JC
KC JB KB JA0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0 1 1 1 1
1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1
1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 0
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 x x
x x x x x x 0 1 0 0 0 0 0 0 x x x x x x x X x x x x x x x x 1 1 1 1
1 1 1 1 x x x x x x x x 1 1 1 1 1 1 1 1 0 0 1 0 X X X X 0 0 0 0 X X
X X 0 0 0 0 X X X X 1 0 0 0 X X X X X X X X 1 1 1 1 X X X X 1 1 1 1
X X X X 1 1 1 1 X X X X 1 1 1 1 0 1 X X 0 0 X X 0 0 X X 0 0 X X 0 0
X X 1 0 X X 0 0 x X 0 0 X X X X 1 1 X X 1 1 X X 1 1 X X 1 1 X X 1 1
X X 1 1 X X 1 1 X X 1 1 0 X 0 X 0 X 0 X 1 X 0 X 0 X 0 X 0 X 1 X 0 X
0 X 0 X 0 X 0 X 0 X
CONTROL E0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
22 23 24 25 26 27 28 29 30 31 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1
KAx 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x 1 x
1
Ecuaciones: Par los estados K todos ban a estar en alto. KD=1
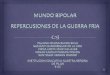
KC=1 KB=1 KA=1 SIMULACIN DEL CIRCUITO JD=DCBA+DCBA JC=ECBA+ECBA
JB=EDBA+EDBA JA=EDCA+EDCA
R1 100% 2k Key=A U6A U7A C1 7414N 100F 5V VCC R3 1k R8 2204 1 16
1J 1CLK 1K ~1Q ~1CLR 3 14 2 ~1PR 1Q 15 4 1 16 1J 1CLK 1K ~1Q ~1CLR
14
U10A VCC 5V
U4A
U5A2 ~1PR
U3A
2 ~1PR 1Q
7
DA15 9 6 12 2J
U1B2Q 11 4 1 1J 1CLK 1K
U2A1Q 15 9 6 2J 2CLK 2K
7 ~2PR 2Q
U2B11
~2PR
2CLK 2K ~2Q ~2CLR 10
16
LED6
~1Q ~1CLR
14
12
~2Q ~2CLR
10
7476N
3
7476N 5V
8
7476N
3
7476N
8
7476N
VCC
R7 220 R2 220 R4 220
R5 220
R6 220
LED1
LED2
LED4
LED3
LED5
Para amplificar la corriente para el motor unipolar se requiere
de un amplificador independiente para cada bobina.
5.- MATERIALES
CANTIDAD 5 1 1 2 1 1 1 8 4 12 12 1 1 16.- CONCLUSIONES
DESCRIPCION C.I 7476 C.I 7420 C.I 7474 C.I 7447 C.I 7486 Motor
de paso bipolar Motor de paso unipolar Transistores TIP 120
Transistores TIP 147 Resistencias 2.2K Diodos 1N4007 Protoboard
Multmetro Fuente de alimentacin de 5,12V
-
Se Diseo un controlador para motor de paso bipolar y motor de
paso unipolar con flip-Flops y compuertas.
-
Se diseo y se aplic los amplificadores de corriente utilizando
con transistores ara alimentar y controlar los motores de paso.
Para el motor bipolar se dise un amplificador de corriente
H-Bridge.Se observ el funcionamiento de un motor de pasos y su
comportamiento con el controlador en el sentido de giro (Horario y
anti horario).
-
7. RECOMENDACIONES
-
Tener siempre en cuenta el diagrama de conexin de cada CI,
observar si el dispositivo trabaja con lgica activa alta o baja, ya
que del conocimiento del CI dependen los correctos resultados a la
salida. Tomar las debidas precauciones en el manejo de los equipos
a utilizar, para evitar daos o accidentes.
-
-
Tener todos los materiales y equipos disponibles para lograr los
resultados es perados, tanto simulados y prcticos.
-
Utilizar la hoja de datos (datasheets) de los circuitos
integrados para una correcta conexin.
8.- BIBLIOGRAFIA
-
Sistemas Digitales principios y aplicaciones. Ronald
Tocci.http://www.forosdeelectronica.com/about537.html
Datasheets de las compuertas: 7404 7476, 7474, 7420,