Embed Size (px)
DESCRIPTION
ttyy
Citation preview
Fundación Centro De Investigación Y Consultoría Administrativa CIDCA Facultad de Ingeniería Electrónica. Interpretación y Análisis de Resultados
1
Control De Velocidad Con Motor DC Manipulado Con PIC 16F877A
Fundación Centro De Investigación Y Consultoría Administrativa CIDCA Facultad de IngenieríaControl por pc – Pilpphe Maziat
Miguel Ángel Puentes Martínez <[email protected]
Resumen — En este informe aplicamos uno de los métodos para el control de velocidad de un motor DC mediante la variación (potenciómetro) con la programación PIC C.
Índice de términos —
Abstract— In this report we apply one of the methods for controlling speed of a DC motor by varying (potentiometer) with programming PIC C.
Index terms –
OBJETIVOS
1- Controlar la velocidad de giro de un motor DC con una señal pwm.2 Utilizar manejar perfectamente todos los comandos en ensamblador utilizados.3- Usar un pic16f877A para controlar en lazo abierto la velocidad un motor dc mediante una señal pwm controlada por un potenciómetro.
I. INTRODUCCIÓN
Control por PWM (Pulse-width modulation (PWM)):
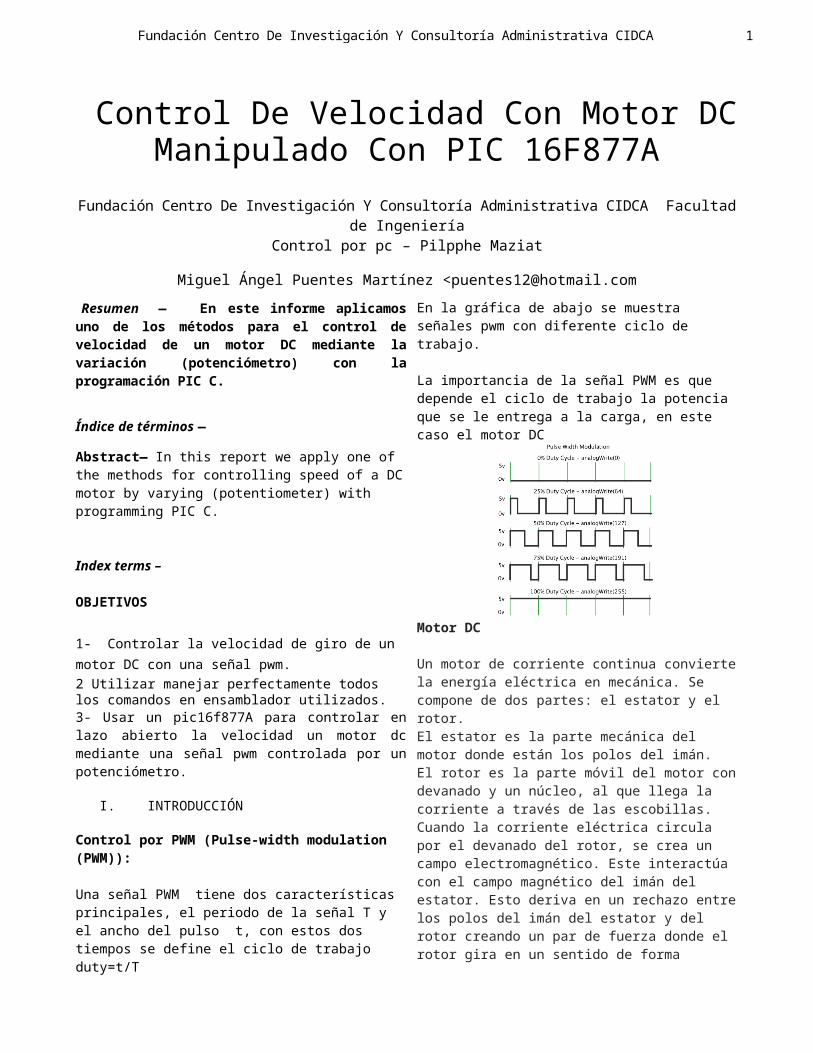
Una señal PWM tiene dos características principales, el periodo de la señal T y el ancho del pulso t, con estos dos tiempos se define el ciclo de trabajo duty=t/TEn la gráfica de abajo se muestra señales pwm con diferente ciclo de trabajo.
La importancia de la señal PWM es que depende el ciclo de trabajo la potencia que se le entrega a la carga, en este caso el motor DC
Motor DC
Un motor de corriente continua convierte la energía eléctrica en mecánica. Se compone de dos partes: el estator y el rotor.El estator es la parte mecánica del motor donde están los polos del imán.El rotor es la parte móvil del motor con devanado y un núcleo, al que llega la corriente a través de las escobillas.Cuando la corriente eléctrica circula por el devanado del rotor, se crea un campo electromagnético. Este interactúa con el campo magnético del imán del estator. Esto deriva en un rechazo entre los polos del imán del estator y del rotor creando un par de fuerza donde el rotor gira en un sentido de forma permanente.Si queremos cambiar el sentido de giro del rotor, tenemos que cambiar el sentido de la corriente que le proporcionamos al rotor; basta con invertir la polaridad de la pila o batería.
Potenciómetro
Fundación Centro De Investigación Y Consultoría Administrativa CIDCA Facultad de Ingeniería Electrónica. Interpretación y Análisis de Resultados
2
Un potenciómetro está compuesto por una resistencia de valor total constante a lo largo de la cual se mueve un cursor, que es un contacto móvil que divide la resistencia total en dos resistencias de valor variable y cuya suma es la resistencia total, por lo que al mover el cursor una aumenta.
PIC 16F877a
Se denomina microcontrolador a un dispositivo programable capaz de realizar diferentes actividades que requieran del procesamiento de datos digitales y del control y comunicación digital de diferentes dispositivos.
Partes del pic 16f877a
Los materiales mara utilizar control de velocidad con motor dc en PWM
1 Resistencia 10Kῼ Motor dc 1 transistor 2n2222 1 diodo 1n4004 1 potenciómetro de 10Kῼ 1 pic 16F877A 1 quemador pickit 2
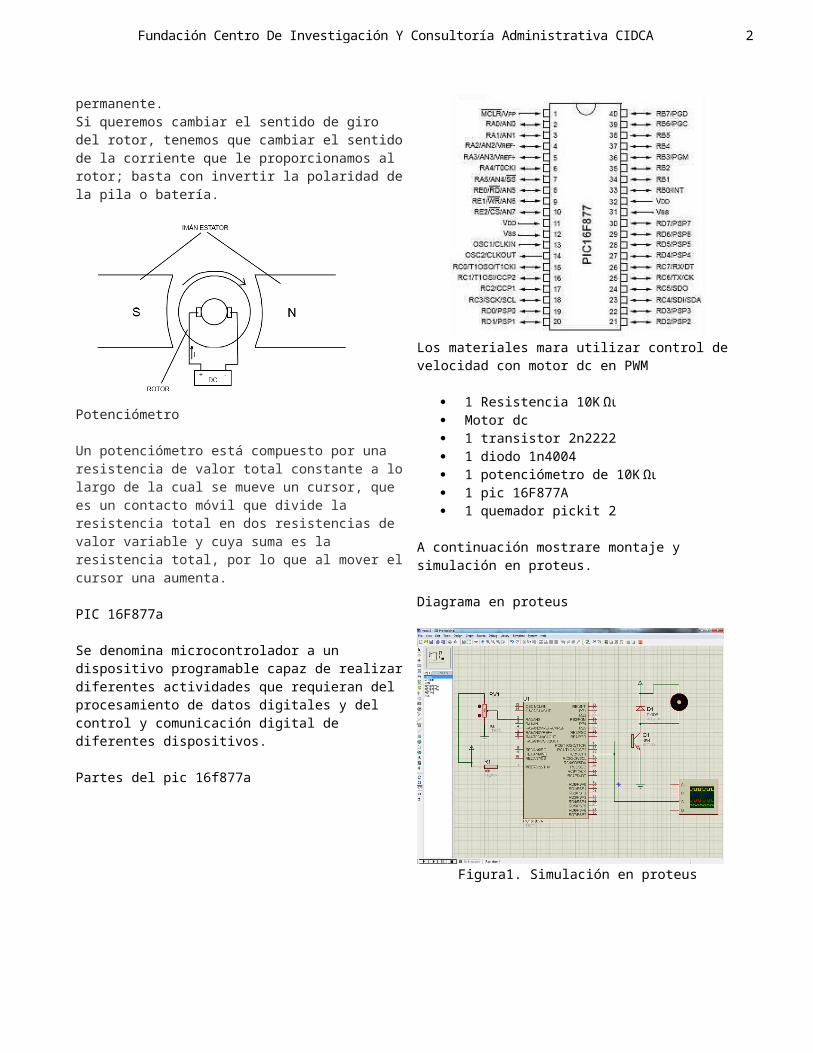
A continuación mostrare montaje y simulación en proteus.
Diagrama en proteus
Figura1. Simulación en proteus
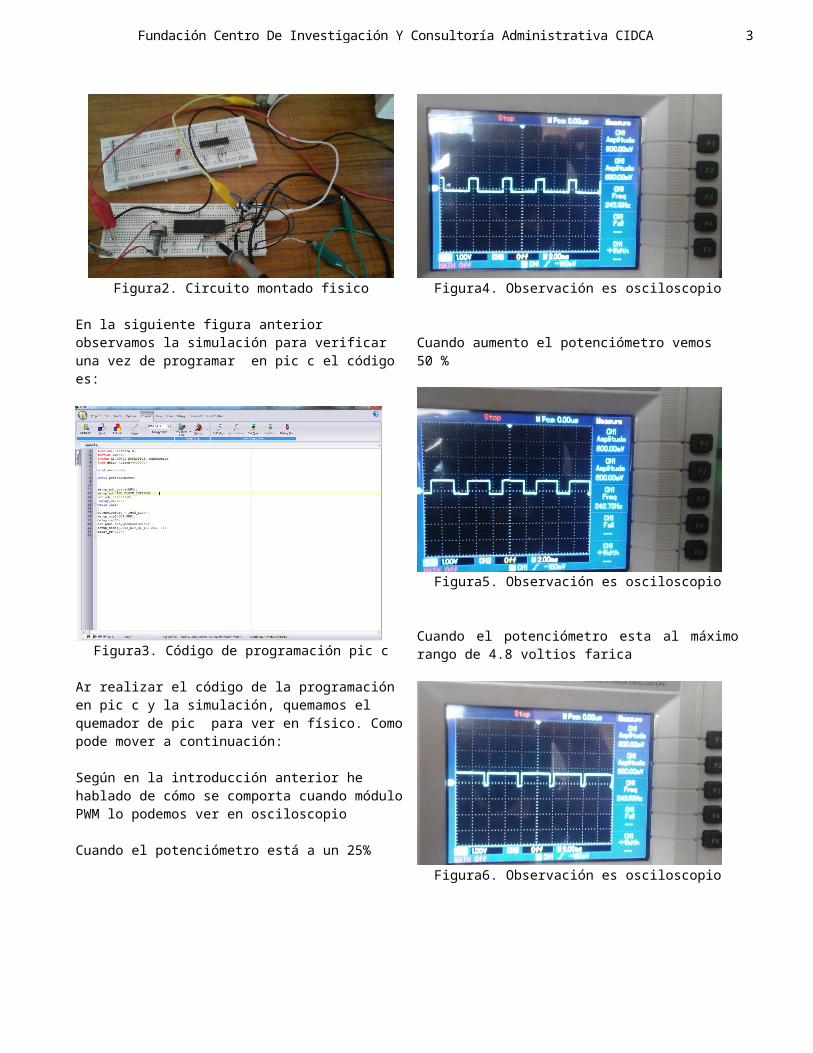
Figura2. Circuito montado fisico
En la siguiente figura anterior observamos la simulación para verificar una vez de programar en pic c el código es:
Figura3. Código de programación pic c
Ar realizar el código de la programación en pic c y la simulación, quemamos el quemador de pic para ver en físico. Como pode mover a continuación:
Según en la introducción anterior he hablado de cómo se comporta cuando módulo PWM lo podemos ver en
Fundación Centro De Investigación Y Consultoría Administrativa CIDCA Facultad de Ingeniería Electrónica. Interpretación y Análisis de Resultados
3
osciloscopio
Cuando el potenciómetro está a un 25%
Figura4. Observación es osciloscopio
Cuando aumento el potenciómetro vemos 50 %
Figura5. Observación es osciloscopio
Cuando el potenciómetro esta al máximo rango de 4.8 voltios farica
Figura6. Observación es osciloscopio
II. CONCLUSIONES
1- comprender y analizar cómo se controlar cuando a medida que aumento el valor de voltaje en potenciómetro empieza varia el pulso de ancho de banda PWM
2- con ayuda de tutoriales realizo los paso para realizar el trabajo de control de velocidad con motor dc.
III. REFERENCIAS
[1] Eduardo García Breijo. Compilador C CCS y simulación PROTEUS para micro controladores PIC. Alfa omega. 2008. [2] Tutoriales compilador C CCS[3]http://medirtemperatura.com/termistor.php[4]http://apunteselectronicos.blogspot.com.co/2013/02/caracteristicas-generales-del-pic-16f877.html

![Emotron VFX 2.0 Variador de velocidad · PWM Motor [22E] Nuevo menú (PWM = modulación por ancho de pulsos). ... velocidad del motor ... 369 Control Ref StpA Normal 531 AnOut 1 Func](https://img.pdfslide.es/doc/110x75/5bb7496d09d3f237458d8221/emotron-vfx-20-variador-de-pwm-motor-22e-nuevo-menu-pwm-modulacion-por.jpg)



























