-
LA TEORA DE REDES EN INGENIERA DECONTROL: APLICACIN AL
ANLISIS
DINMICO Y AL CONTROL DE PROCESOS
Luis T. Antelo, Irene Otero-Muras, Julio R. Banga,Antonio A.
Alonso
Grupo de Ingeniera de Procesos, Instituto deInvestigaciones
Marinas (CSIC). Eduardo Cabello, 6
36208, Vigo (ESPAA)
Resumen: Los procesos de la industria qumica, alimentaria o
biotecnolgica, ascomo muchos de los mecanismos propios de la
biologa de sistemas, pertenecen ala clase de los llamados sistemas
de proceso. En esta contribucin se hace uso deun conjunto de
resultados previos que combinan aspectos de la teora de sistemasy
grafos, con mtodos de termodinmica y de redes de reaccin para as
sentar lasbases sobre las que elaborar una representacion formal y
generalizada de procesosen trminos de redes complejas.Esta
representacin -parcialmente desarrollada por los autores- adems de
unificarun amplio nmero de procesos aparentemente diversos,
proporciona una sis-temtica eficiente con la que abordar los
problemas de control descentralizadoy anlisis dinmico avanzado
(incluyendo el anlisis de bifurcacin). Copyright c2007
CEA-IFAC.
Palabras clave: Redes Complejas, sistemas de proceso, anlisis
dinmico, anlisisde bifurcacin, control descentralizado.
1. INTRODUCCIN
Desde un punto de vista global, los sistemas deproceso pueden
caracterizarse como aquellos queobedecen las leyes de la
termodinmica (Alonsoet al. 2004). Una planta qumica completa,
unacolumna de destilacin, un reactor o una rutametablica en el
interior de la clula son ejemplosde sistemas de proceso. Sin
embargo, tanto suanlisis dinmico como el control y operacin destos
se ha venido abordando tradicionalmente demanera
descontextualizada, desaprovechando porlo tanto, muchas de las
analogas y propiedadesintrnsecas que los caracterizan como
sistemasde proceso. Esto es debido en gran medida a lacarencia de
una representacin unificada y decarcter general para los
mismos.
En algunos trabajos previos se ha abordado par-cialmente el
problema de la representacin formalunificada a fin de caracterizar
la estabilidad es-tructural de plantas qumicas (Hangos et al.
1999)o el control de inventarios (Farschman et al. 1998).En esta
contribucin se propone una descripcinformal generalizada de los
sistemas de proceso. Setrata de una herramienta conceptual que hace
usode una representacin en grafos definidos por con-juntos de nodos
caracterizando fases materiales, yconectados mediante una topologa
definida, a suvez asociada a un sistema de ecuaciones
diferen-ciales ordinarias.
Este conjunto de ecuaciones, que definen el mo-delo del sistema
de proceso puede escribirse deforma general como:
JLDIEZPlaced Image
JLDIEZISSN: 1697-7912. Vol. 4, Nm. 1, Enero 2007, pp. 24-34
-
z = f(z, k) (1)
donde z es el vector de variables de estado yk los parmetros del
sistema, o magnitudes quese mantienen constantes durante todo el
proceso.Para los sistemas de proceso, la primera ley de
latermodinmica, relacionada con la conservacinde propiedades,
establece las ecuaciones del mo-delo correspondientes a los
balances de materia,energa y cantidad de movimiento, mientras quela
segunda ley de la termodinmica fija la di-reccin en la que
evolucionan los estados en eltiempo, proporcionando un candidato a
funcin deLyapunov (la entropa) para el anlisis dinmico(Alonso y
Ydstie 2001).
Los sistemas termodinmicos fuera del equilibrioo sometidos a
fuerzas externas evolucionan me-diante procesos irreversibles que
producen en-tropa hacia el equilibrio termodinmico (igualdadde
temperaturas, potenciales qumicos y presin).Por otra parte, los
sistemas de proceso son sis-temas termodinmicos abiertos que
intercambianmateria, energa o momento con los alrededoresa travs de
la frontera del volumen de control(Demirel 2002). Esta
interpretacin de los sis-temas basada en la termodinmica es til a
la horade construir el grafo asociado, pues permite definirlos
nodos como subsistemas termodinmicos y lasconexiones como las
relaciones de transporte depropiedades entre los distintos
subsistemas y conlos alrededores.
Los fenmenos de transporte caractersticos deesta clase de
sistemas poseen un origen diverso, loque resulta en diferentes
tipos de conexiones (contopologas distintas asociadas a las
ecuaciones ca-ractersticas de cada fenmeno). Los
fenmenosconvectivos son debidos a movimientos en masa defluidos,
mientras que los fenmenos disipativos sonconsecuencia directa de
choques entre partculas(Alonso et al. 2002). Los fenmenos
disipativosque tienen lugar en los sistemas de proceso in-cluyen
(Alonso et al. 2000):
-La difusin, gobernada por las leyes de New-ton, Fick y Fourier
para el transporte conductivode momento, masa y energa,
respectivamente.Estas leyes se caracterizan por ecuaciones
linealescon respecto a los estados.
-La transferencia entre interfases, descritageneralmente
mediante leyes empricas basadas enlas anteriores, tambin lineales
con respecto a losestados.
-Las reacciones qumicas, que tambin se clasi-fican dentro de los
fenmenos de tipo disipativo(Gorban et al. 2004), aunque en este
caso estnregidas por una ley de tipo no lineal con respectoa los
estados: la ley de accin de masas.
Los fenmenos convectivos y de transferencia pordifusin
caractersticos de los sistemas de procesostienen lugar en dos
escalas de tiempo diferen-ciadas, lo cual ocasiona que el grafo de
la redrepresentativa de estos sistemas posea una estruc-tura
jerarquizada, apareciendo subredes dentrode la red compleja
principal (Antelo et al. 2007a).Este aspecto, particularmente
crtico en la inter-pretacin de las redes de proceso, se describiren
detalle en la seccin dedicada al formalismoterico.
Una vez que el modelo fenomenolgico de unsistema de procesos se
asimila a esta descripcinen forma de red compleja, ste deja de ser
una"caja gris", proporcionando tanto el significadofsico como la
estructura matemtica necesariapara abordar el anlisis dinmico y el
control demanera eficiente y sistemtica. A continuacin seenumeran
algunas de las utilidades de la repre-sentacin generalizada
propuesta en este trabajo,en varios mbitos de la ingeniera de
procesos:
Modelado: Una herramienta conceptual comoes el grafo asociado a
un sistema de proceso per-mite utilizar de manera ms eficiente los
nuevosentornos de modelado informticos para la simu-lacin de
procesos (EcosimPro, gPROMS, etc)basados en la programacin
orientada a objetos.Asimismo representa un avance hacia un
lenguajeunificado de modelado.
Anlisis dinmico: en un enfoque clsico, laconcepcin de los
sistemas de proceso como redesde subsistemas termodinmicos
interconectadossistematiza el uso de mtodos basados en la teorade
Lyapunov, por ser la entropa termodinmicauna funcin de Lyapunov
inherente a estos sis-temas. Adems, la entropa es una posible
fun-cin de almacenaje para un anlisis de estabilidadbasado en teora
de pasividad, muy til a la horade estudiar la estabilidad de
sistemas a partirde las propiedades dinmicas de los
subsistemasacoplados que los componen.
Desde un enfoque ms puramente estructural, laconectividad
caracterstica de un grafo est rela-cionada con la dinmica de los
sistemas, tal comose demuestra, por ejemplo, con la relacin
entrelas conexiones en configuracin de feedback po-sitivo y la
aparicin de multiplicidad de estadosestacionarios (Angeli et al.
2004). La no linealidadpresente en las conexiones relacionadas con
la leyde accin de masas es la causante de patronescaractersticos,
fenmenos de autoorganizacin,ciclos lmite, multiplicidades u otro
tipo de com-portamientos no lineales complejos. En la seccinde
aplicaciones se ilustrar cmo propiedades in-herentes al grafo de
una red de reacciones deter-minan la estabilidad asinttica o la
presencia decomportamiento complejo en el sistema.
MarinaText BoxL. T. Antelo, I. Otero-Muras, J. R. Banga, A. A.
Alonso
JLDIEZLine
MarinaText Box25
-
Anlisis de bifurcacin : los modelos quenos ocupan contienen
parmetros que se mantienenconstantes durante todo el proceso, como
sonlas difusividades, constantes cinticas, coeficientesglobales de
transmisin de propiedad, etc. La pre-sencia de muchos parmetros
hace que el anlisisclsico de bifurcacin no sea aplicable en la
ma-yora de los casos. En la seccin de aplicacionesse muestra un
nuevo mtodo (Otero-Muras et al.2006b) en el que una propiedad
estructural delas redes se usa para parametrizar las ecuacionesdel
modelo en funcin de un nmero reducido deparmetros. De esta manera
se divide el espaciode parmetros originales en regiones con
distintocomportamiento dinmico.
Control descentralizado: En la seccin deaplicaciones se ilustrar
el uso de las redes deproceso y de inventario aplicadas al diseo
sis-temtico de estructuras descentralizadas de con-trol
2. FORMALISMO TERICO
2.1 Jerarquas en la red asociada a un proceso
Como redes complejas, las redes de proceso serepresentan
mediante un grafo jerarquizado. Acontinuacin se ilustra esta
jerarqua de la redasociada a un sistema de proceso describiendo
losconceptos de red de proceso, red de inventario,subredes
disipativas y redes de reaccin.
Las redes de proceso (Antelo et al. 2007a, An-telo et al. 2007b)
se definen como un conjuntoj=1,. . . , de regiones homogneas
conectadaspor flujos de materia y energa, que a su vezpueden ser de
carcter convectivo o disipativo.Las conexiones convectivas son un
conjunto de flujos, que para cada nodo se denominan fj R+c(flujo de
materia) y pj(fj) R+ (flujo de e-nerga). Las conexiones disipativas
se representanmediante los vectores k R+dc ( k=1. . . ,c) y R+du ,
donde dc y du denotan las transfe-rencias de materia y energa,
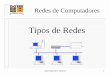
respectivamente. Demanera grfica, como se muestra en la Figura1,
los flujos disipativos se simbolizan mediantedobles flechas
continuas (transporte de materia)y discontinuas (transporte de
energa), mientrasque los flujos convectivos se representan
medianteuna sola flecha.
La dinmica de las redes de proceso se repre-senta formalmente
mediante el siguiente sistemade ecuaciones diferenciales ordinarias
para la masaen moles n y la energa u:
nk = N0fk0 + Nfk + Nk +R (2)
con nk, fk R+; fk0 R+di ; k = 1, . . . , c y
V
L
J
f ,p(f )V V
f ,p(f )L L
pJ
k
Figura 1. Red de proceso para un plato genricode destilacin con
intercambio de calor. Losnodos L y V indican la fase lquida y
vapor,respectivamente. El nodo J corresponde a
unintercambiador.
u = N0p0 + Np + N + Q (3)
con u, p R+; p0 R+di . En estas ltimasexpresiones, f0 Rdi es el
vector de entradasconvectivas (y di el nmero de entradas) y
lasmatrices N0 R+di , N R, N Rdcy N Rdu denotan conexiones
disipativas yconvectivas. Finalmente, los trminos R y Q pre-sentes
en (2)-(3) se han incluido para considerarlos efectos de las
reacciones qumicas y fuentesexternas de calor, respectivamente.
Los fenmenos convectivos y de transferencia ca-ractersticos de
los sistemas de proceso tienen lu-gar en dos escalas de tiempo
diferenciadas. Ana-lizando, por ejemplo, lo que ocurre en la redde
proceso asociada al plato de una columna dedestilacin sin
intercambio de calor, se obtiene elesquema representado en la
Figura 2. Para uninstante de tiempo t, el flujo convectivo
introduceun paquete de fluido definido por las condicionesiniciales
de dicho flujo. Entonces, se genera unfenmeno disipativo en un
instante de tiempo debido a la existencia de gradientes de
potencial(ya sea potencial qumico, temperatura o presin),que hace
que el sistema evolucione hasta el estadode equilibrio, en el cual
dichos potenciales se hacencero. Tras esto, en un instante t + ,
tiene lugarla descarga del primer paquete de fluido y laentrada del
siguiente. En el intervalo de tiempo ,el sistema puede considerarse
cerrado, existiendonicamente flujos disipativos.
Nodo L Nodo V
Nodo L Nodo V
Nodo L Nodo V
t t+
Figura 2. Escalas de tiempo asociadas al trans-porte de materia
convectivo y disipativo paraun plato de destilacin.
MarinaText Box26
JLDIEZLine
MarinaText BoxLa Teora de Redes en Ingeniera de Control:
Aplicacin al Anlisis Dinmico y al Control de Procesos
-
Este hecho permite establecer una jerarqua en elgrafo de una red
de proceso, a travs del conceptode redes de inventario (ver Figura
3). En An-telo y colaboradores (Antelo et al. 2007a, Anteloet al.
2007b) se define una subred disipativaD(j), como aquella subred
formada por j nodosinterconectados nicamente por flujos
disipativos.De esta forma, cada subred disipativa es, a su vez,un
nodo de la red de inventario asociada formadapor nodos conectados
nicamente mediante flu-jos convectivos.
Red Fundamental Red de Inventario
Red disipativa
Red de Reacciones
ESCALA DE TIEMPO LENTA (t)
ESCALA DE TIEMPO RPIDA (t)
k
k -
+
A,B
A B
1 2
1
2
f(1),p(f1)
f p1 1
Figura 3. Relacin jerrquica entre las subredesen una red de
proceso y su relacin con lasredes de inventario.
La expresin para la red de inventario asociada a(2)-(3) es:
nI = NFI +R nI , FI ,R R+ (4)uI = NpI uI , pI R+ (5)
Ntese que la dinmica global puede representarsepor un sistema de
la forma (1), en el que paracj componentes qumicos, el vector de
estados zjasociado a cada nodo posee dimensin cj + 2 y esde la
forma:
zj = (n1j , ..., ncj , uj)T . (6)
2.2 Estructura de las redes de reaccin
El trminoR en (4) incluye las posibles reaccionesqumicas
presentes en los nodos del proceso quea su vez pueden describirse
mediante una redde reacciones. sta est constituida por unconjunto
de r pasos de reaccin entre c especiesqumicas, como la representada
en la Figura 4.
En la teora de redes de reaccin o CRNT desa-rrollada por
Feinberg, Jackson y Horn (Feinberg1979), stas se representan
mediante un grafo di-rigido sobre los llamados complejos, o
conjuntos
de especies qumicas que aparecen a la izquierday a la derecha de
cada paso de reaccin.
A 2A
12
21
2AA
CA + B
BC 34 45
A +B C B
5443
k
k
k k
k k
Figura 4. Mecanismo de Edelstein y grafo asociadocon m = c = 5.
El grafo cuenta con doscomponentes fuertemente conectados.
La relacin entre los m complejos de una redy las especies
qumicas se recoge en una matrizY Rcm, cuyo componente yij es el
coeficienteestequiomtrico de la especie i en el complejoj. Cada
complejo de la red es un nodo en elgrafo, mientras que las
reacciones irreversibles en-tre complejos se representan mediante
flechas queconectan dichos nodos. Estas reacciones obedecenla ley
de accin de masas; por lo tanto, cadacomplejo lleva asociada una
funcin escalar de laforma:
i(x) =c
j=1
xyijj , (7)
as como un peso asociado a cada flecha que rela-ciona complejos
(ver Figura 4) y que se corres-ponde con las constantes de reaccin.
Los "sub-grafos aislados" que conforman una red se de-nominan
componentes, y debido a la reversibilidadde la mayora de mecanismos
de reaccin, sonfrecuentemente (en trminos de teora de
grafos)componentes fuertemente conectados.
Siguiendo con el formalismo descrito, la dinmicade una red de
reacciones se expresa mediante elconjunto de ecuaciones
diferenciales:
x = Y Ak (x) (8)donde Y es la matriz estequiomtrica, (x) esel
vector de monomios (7) y Ak es una matrizconstruida a partir de la
matriz de adyacencia delgrafo (R) como:
Ak = R diag(RT 1 ) (9)
Los balances de materia para cada radical o es-pecie qumica
fundamental Ci (i = 1, ..., s) satis-facen:
C0i = bTi x para i = 1, ..., s (10)donde los elementos del
vector bi Nc representanlas unidades de Ci en cada especie, y C0i =
bTi x0con x0 = x(0). La interseccin del ortante positivo(i.e. Rc+)
con el conjunto de s leyes de conservacindefine el denominado
simplex de reaccin:
(x0) ={x R+c /bTi (x x0) = 0, i = 1, ..., s
}(11)
JLDIEZLine
MarinaText BoxL. T. Antelo, I. Otero-Muras, J. R. Banga, A. A.
Alonso
MarinaText Box27
-
el cual representa un invariante para la dinmicade las
reacciones del sistema equivalente a laregin compacta para el caso
de las redes deproceso.
Es preciso destacar, por ltimo, las posibilidadesque pueden
derivarse de las analogas existentesentre redes de reaccin tal y
como han sido for-muladas en CRNT (Feinberg 1979), y las redesde
proceso. As, las redes de proceso participande conexiones tanto
reversibles (subredes disipati-vas) como irreversibles (subredes
convectivas) enlas que el flujo de propiedad extensiva (masa
oenerga) es proporcional al correspondiente valorde la propiedad
intensiva. Por lo tanto, una vezestablecidas las relaciones entre
ambos tipos deredes, es posible hacer uso de los potentes
re-sultados de estabilidad desarrollados en CRNT yorientarlos al
estudio de redes de proceso.
3. APLICACIONES
3.1 Propiedades dinmicas en redes de reaccin
En este apartado, y en el contexto de redes dereaccin, se pondr
de manifiesto las estrechasrelaciones existentes entre la
estructura del grafo,estructura dinmica de la red (8) y la
naturalezade los puntos de equilibrio posibles.
3.1.1. Naturaleza de los posibles puntos de equi-librio en la
red Tal y como se deduce de laexpresin (8) para la evolucin dinmica
de unared de reacciones, una condicin necesaria paraque el punto x
sea un estado estacionario esque, o bien el vector (x) pertenezca
al espacionulo de Ak, o bien el producto Ak (x) est enel espacio
nulo de Y . Por lo tanto, la regin deposibles puntos de equilibrio
Y Ak (x) = 0 serelaciona con dos subespacios caractersticos.
Elprimero de ellos es:
D0 = {z Rm/Ak(z) = 0} (12)
cuya base generadora se compone de un nmerode vectores no
negativos igual al nmero de com-ponentes del grafo, satisfaciendo
en el caso decomponentes fuertemente conectados, que cadaelemento
{Xj}j=1 de la base satisface Ti Xj > 0siempre que i pertenezca
al componente j, y ceroen el resto de los casos.
El segundo subespacio se define como:
D = {z Rm/z Null(Y ) Im(Ak)} (13)cuya dimensin se conoce en la
bibliografa comodeficiencia de la red. Esta dimension se
calculadirectamente a partir del grafo de la red de reac-ciones con
la frmula = m , donde y denotan el nmero de componentes y la
dimensin
del subespacio generador del simplex de
reaccin,respectivamente.
Una solucin de equilibrio x del sistema (8) debesatisfacer,
adems de la pertenencia de (x) a unode los subespacios descritos,
la siguiente relacindeterminada por la ley de accin de masas:
ln(x) = Y T lnx (14)
Resultados de la CRNT demuestran que cualquiersolucin positiva
en x D0 interseca al simplexde reaccin exactamente en un punto, que
resultaser un punto de equilibrio asintticamente estable.De hecho,
el Teorema de Deficiencia Cero aseguraque las redes cuya
deficiencia es nula slo aceptansoluciones en D0 (el subespacio D
contiene sla-mente al vector nulo) y por lo tanto el equilibrioser
nico y asintticamente estable, indepen-dientemente de los valores
que tomen losparmetros. Por otro lado, las redes de reaccincon
deficiencia positiva pueden albergar multipli-cidades u otros
comportamientos complejos, aso-ciados al subespacio D.
3.1.2. Anlisis de bifurcacin Tal y como se haexpuesto en el
apartado anterior, una propiedadestructural del grafo, denominada
deficiencia, esdeterminante en el comportamiento dinmico delas
redes de reaccin. Esta propiedad se ha uti-lizado asimismo en la
formulacin de un mtodopara detectar bifurcaciones en redes
dereaccin (Otero-Muras et al. 2006b) cuyas basesse enuncian
brevemente a continuacin, y que per-mitir definir los distintos
rangos de parmetrosen donde aparece comportamiento complejo.
Como ya se ha indicado, una red de deficiencianula corresponder
siempre a un sistema con unnico punto de equilibrio asintticamente
estable,mientras que para una red con deficiencia no nulacualquier
tipo de comportamiento complejo estarasociado al subespacioD. As,
para las solucionespertenecientes a (13) se cumple que:
Ak (x) =
i=1
iwi (15)
con i R y wi N+m. Utilizando las ecua-ciones (14) y (15), la
curva de soluciones se puedeexpresar en funcin de un nuevo conjunto
deparmetros, que ser el utilizado en el anlisis debifurcacin. En
este caso, el nmero de parme-tros a variar es igual a la
deficiencia de la red,que por lo general ser un nmero bajo,
inclusordenes de magnitud menor que el nmerode parmetros
originales.
Este mtodo se ilustra sobre un ejemplo de red dereacciones
conocido como mecanismo de Edelstein(ver Figura 4). La deficiencia
de esta red es = 52 2 = 1, y por lo tanto el anlisis se har
MarinaText BoxLa Teora de Redes en Ingeniera de Control:
Aplicacin al Anlisis Dinmico y al Control de Procesos
MarinaText Box28
JLDIEZLine
-
mediante la variacin de un solo parmetro.La expresin de la curva
parametrizada H enfuncin de es:
H(x, p, ) = p1x1 + x21 p2x1x2 + x3
x3 p3x2 +
(16)
donde los parmetros originales se han agrupadoen p1 = k12/k21,
p2 = k34/k43 y p3 = k54/k45.
De esta ecuacin se deducen las expresiones re-presentadas en la
Figura 5 para x1, x2 y x3en funcin de , donde se observa que la
solu-cin x R3 existe slamente para > 0 con0 = p12/4. Por otro
lado, el lugar geomtricodonde la derivada de la expresin (16) se
hace cero(p3 = p2x1) determina el valor crtico para quedivide las
regiones del espacio de parmetros concomportamiento cualitativo
distinto. Del anlisismostrado en la Figura 6 se pueden
descartar,dentro de cada regin, los intervalos donde no
haysoluciones positivas, y entre los intervalos dondehay soluciones
positivas se comprueba si se cumpleuna condicin necesaria para la
existencia de mul-tiplicidades. Dado que los puntos de
equilibrioson intersecciones entre la curva de soluciones yel
simplex de reaccin, se establecen condicionessobre las posiciones
relativas entre el simplex y lacurva para detectar el
comportamiento complejo.En el caso de las multiplicidades, stas
ocurrensiempre que se cumpla que bT (H) = 0 paraalgn .
Figura 5. Multiplicidad de estados estacionarios(tres
intersecciones entre la curva de solu-ciones y el simplex) para la
red de Edelstein(p1 = 8.5, p2 = 1 p3 = 0.2).
En este ejemplo, esta relacin equivale a la condi-cin dx2/d =
1/(1 + p3) = dx3/d, que slose cumple (como se deduce de la Figura
6) enla regin III del espacio de parmetros (paravalores de entre 0
y ). El espacio de parme-tros est, por lo tanto, dividido en tres
regionescon comportamiento cualitativo distinto (Figura6.d).
Eligiendo arbitrariamente un conjunto deparmetros que pertenecen a
R.III se comprueba(Figura 5) cmo las multiplicidades aparecen,
dehecho, en esta regin.
Se resalta por ltimo la conveniencia de explorarprocedimientos
algoritmos de bsqueda de bifur-caciones basados en la metodologa
aqu expuesta.
3.2 Control descentralizado de redes de proceso
La metodologa desarrollada en (Antelo et al.2007a) permite el
diseo sistemtico de estruc-turas de control a partir del desarrollo
de con-troladores descentralizados robustos que asegu-ran la
estabilidad global de los sistemas de pro-ceso. Para ello se
combinan resultados previosque relacionan la termodinmica y la
teora depasividad. Los ingredientes tericos bsicos deesta
metodologa fueron establecidos por Alonso eYdstie (1996) en lo
referente al diseo de controlpasivo, as como en el contexto de
sistemas dis-tribuidos (Alonso y Ydstie 2001). Siguiendo unalnea de
argumentacin similar, estos conceptoshan sido aplicados al control
de inventarios demateria y energa (Farschman et al. 1998).
Final-mente, en (Antelo et al. 2007a, Antelo et al. 2007b)se
aprovecha la estructura algebraica que subyacea cada red de proceso
para definir una descompo-sicin de la misma en redes fundamentales
de ma-teria y energa sobre las cuales se pueden definir,de forma
sencilla, lazos conceptuales de control deinventario.
3.2.1. Control de inventario A partir de lasEcuaciones (4) y
(5), se disean los controladoresde inventario de materia y energa
con los queasegurar que los estados de la red permanezcanen una
regin compacta definida por inventariosconstantes de la forma:
(D) =
{(zj , vj)
nj=1
jD
vj = v;
jD
uj = u;
jD
ck=1
k
nkj = m
}(17)
Puesto que es sobre esta regin compacta donde laentropa alcanza
un mximo para un volumen (),masa (m) y energa interna (u) total
constante,sta funcin (la entropa) se puede emplear comocandidato a
funcin de Lyapunov con la quedisear esquemas de control
descentralizado quede forma robusta aseguren la estabilidad de
losinventarios de materia y energa (Alonso y Ydstie1996, Alonso y
Ydstie 2001). Dichos inventarios,que para cada nodo j D deben ser
estrictamentepositivos, esto es:
j > 0; uj > 0;c
k=1
knkj = mj > 0 j D(18)
se regulan mediante controladores proporcionalesde la forma:
I = I + m (mI mI) ; pI = pI + u (uI uI)(19)
JLDIEZLine
MarinaText BoxL. T. Antelo, I. Otero-Muras, J. R. Banga, A. A.
Alonso
MarinaText Box29
-
05
0
5
10
x 1
05
0
5
10
15
20
x 2
5 0 5 10 15 2020
10
0
10
20
x 3
*0
05
0
5
10
x 1
020
10
0
10
20
30
x 2
020
10
0
10
20
30
x 3
0*
(a) p3 > p1p2 (b) p1p2 > p3 > 12p1p2
05
0
5
10
15
x 1
020
10
0
10
20
30
x 2
20 15 10 5 0 5 10 15 2020
10
0
10
20
30
x 3
*0(c) p3 < 12p1p2 (d) Regiones I, II y III
Figura 6. Soluciones de equilibrio como funcin de para las tres
regiones con comportamiento cualitativodistinto (R.I, R.II and
R.III) representadas en (d) en escala logartmica.
en los que I pertenece al espacio nulo de N , yn, u en (19)
representan matrices de ganancias.A fin de asegurar convergencia
exponencial, stasse construyen de manera tal que la parte realde
los autovalores asociados a Nm y Nu seanegativa. Mediante el diseo
conceptual propuestode los lazos de control de inventario, y
teniendoen cuenta las Ecuaciones (4) y (5), se asegurala
convergencia de los estados de la red a -verprueba de convergencia
en (Antelo et al. 2007a)- ydel mismo modo la estabilidad de las
variables ex-tensivas. Argumentos similares pueden emplearsepara
demostrar las estabilidad de controladorescon trminos proporcional
e integral (Farschmanet al. 1998)
3.3 Ejemplo de Aplicacin: Control del ProcesoTennessee
Eastman
Desde que Downs y Vogel publicaron en 1993el Proceso Tennessee
Eastman (cuyas siglas sonTEP) (Downs y Vogel 1993), ste ha sido
amplia-mente utilizado en la bibliografa como banco depruebas
debido a sus mltiples posibilidades desdeel punto de vista de la
ingeniera de control: es al-tamente no lineal, inestable en lazo
abierto y pre-
senta un elevado nmero de medidas y variablesmanipuladas, lo que
permite un amplio conjuntode posibles estrategias de control. Por
tanto, elTEP proporciona la oportunidad a los diseadoresde proponer
y probar sus estrategias de control enuna base comparable. Nuestro
trabajo pretende lasistematizacin del mtodo de diseo de
estruc-turas de control a travs del desarrollo de contro-ladores
descentralizados robustos que aseguren laestabilidad global del
TEP.
La Figura 7 recoge el diagrama de flujo correspon-diente al
proceso TEP, destacndose la unidadde reaccin (izquierda del
diagrama) y separacin(unidades flash y stripper a la derecha del
dia-grama) conectadas por un lazo de recirculacin.Este diagrama se
corresponde con la red de pro-ceso mostrada en la Figura 8 en la
que se integranla red de materia y energa. Cada fase presenteen el
proceso se representa mediante un crculomientras que el entorno se
denota por los crculosslidos.
En este punto, es preciso recordar que a cadanodo j en la red se
le asocia un vector de estadoszj = (n1j , ..., ncj , uj)
T , con c = 8 (nmero deespecies qumicas) en el TEP. Los nodos y
el
MarinaText BoxLa Teora de Redes en Ingeniera de Control:
Aplicacin al Anlisis Dinmico y al Control de Procesos
MarinaText Box30
JLDIEZLine
-
Figura 7. Diagrama de flujo correspondiente al Proceso Tennessee
Eastman (TEP).
entorno se conectan a travs de un conjunto den flujos
convectivos de componente y energa,respectivamente. Como ejemplo de
la notacindesarrollada en la Seccin 2 para las redes deproceso, en
la Figura 8 se muestra tanto el flujoconvectivo de materia que
abandona el nodo 1 (f1)como el flujo de energa asociado a l
(p1(f1)).
Los nodos en la red tambin pueden interconec-tarse a travs de
flujos disipativos de transferencia(debidos a potenciales
termodinmicos) de ma-teria y energa, los cuales estn recogidos en
losvectores k y , respectivamente. Grficamente,estos flujos
disipativos se representan mediantedobles flechas continuas, en el
caso de materia,y discontinuas, en el de energa. En la Figura8 se
detallan los vectores correspondientes a latransferencia de materia
existente entre los nodoslquido y vapor en el reactor (), as como
loscorrespondientes a la transferencia de calor en-tre el reactor y
su camisa (). En este caso, elnmero total de conexiones disipativas
de materiay energa es dc = 4 y du = 3.
3.3.1. La descomposicin de la red de procesospara el caso TEP El
comportamiento no linealasociado a la dinmica del TEP, y causante
de lamayor parte de los problemas de estabilidad enel proceso
Tennessee Eastman est relacionado,prcticamente en su totalidad, con
las reaccionesqumicas que tienen lugar en el reactor. Por
ello,parece conveniente la descomposicin del procesoTEP en dos
secciones o subredes que integren,por una parte, la zona de
reaccin, y por otrala de separacin y recirculacin a fin
simplificarel procedimiento de diseo del control. En estesentido es
importante destacar que asegurando, atravs de estructuras de
control, la pasivacin decada una de las subredes, se asegura al
pasividadde la planta completa que, por lo tanto, ser
1
2
f , p (f )
3
4
5
6
7
8
10
9
11
12 13
11 1
k
Figura 8. Red de Proceso del TEP
fcilmente estabilizable dado que la interconexinde sistemas
pasivos preserva la pasividad del con-junto (Willems 1972).
A tal fin, la red de proceso correspondiente alTEP (Figura 8) se
integra en una nueva red deinventarios constituida nicamente por
dos nodostal y como la mostrada en la Figura 9, los
cualesrepresentan las partes o secciones de reacciny separacin del
sistema. El nodo R denota laseccin de reaccin y el nodo S la seccin
deseparacin, respectivamente. Por otra parte, conuna mayor grado de
detalle, el nodo R puederepresentarse con una nueva subred de
proceso(Figura 9) con dos niveles acoplados (materia yenerga).
Del mismo modo se pueden construir subredes dede materia y
energa para el caso de la seccin deseparacin, tal y como se muestra
en la Figura10. Ntese que en esta figura, la torre de desti-lacin
est representada por una unidad genrica
JLDIEZLine
MarinaText BoxL. T. Antelo, I. Otero-Muras, J. R. Banga, A. A.
Alonso
MarinaText Box31
-
(condensador, plato de alimentacin y caldern)que integra las
diferentes fases vapor y lquidasdel sistema. Una representacin ms
realista de lacolumna sera aquella constituida por N
subredesequivalentes correspondiente a cada uno de losplatos de la
columna de destilacin. Sin embargo,y tal como se discute en la
Seccin 2.1, los in-tercambios en las subredes disipativas suceden
enuna escala de tiempo considerablemente menorque la de proceso por
lo que pueden considerarsede equilibrio y as concentrar todos los
nodos enla representacin abreviada.
Sobre las secciones de reaccin y separacin, asdefinidas, ser
sobre las que se aplicar el proce-dimiento jerrquico de diseo de la
estructura decontrol.
V
J
L
C
J
V
L
C
R S
Masa
Energa
Figura 9. Red de proceso simplificada para el TEPjunto con las
subredes de materia y energapara la seccin de reaccin.
R S
J D
D
S
SV
V
L
L
Figura 10. Subredes de materia y energa parala seccin de
separacin. Los nodos SL ySV representan la fase lquida y vapor en
elseparador. Los nodos DL y DV representanla fase lquida y vapor
para un plato genricoen la torre de destilacin.
Una vez llevada a cabo esta descomposicin, y taly como se ha
descrito en la seccin anterior, paracada nodo de estas subredes se
disean lazos de
control de inventario capaces de mantener a lasvariables
extensivas acotadas en la regin inva-riante y convexa definida por
la Ecuacin (17). Endicha regin, la segunda ley de la
termodinmicaproporciona una funcin (la entropa del sistema)acotada
superiormente, por lo que el sistema espasivo. Dado que adems puede
demostrarse queesta funcin posee una curvatura definida (de he-cho
es cncava), puede emplearse como base parala construccin de
funciones de Lyapunov con lasque disear esquemas de control estable
(Alonsoy Ydstie 2001)
Los lazos conceptuales de control de inventariodesarrollados
para las secciones de reaccin y se-paracin del proceso Tennessee
Eastman se mues-tran en la Figura (11). Para el caso de la seccinde
reaccin (Figura 9), y considerando el nivelde materia, es necesario
mantener el inventariode materia en los nodos L y V . Para ello,
elflujo total de inventario entrando en el nodo V seemplea como
variable manipulada para controlarel inventario de masa en el nodo
L, dado que queno existe ningn flujo de salida en este nodo. Parael
caso del nodo V -Figura (9)- el nico grado delibertad disponible es
su flujo de salida. Por tanto,el control de este inventario de
materia en fasevapor debe realizarse mediante la combinacin deun
control de la presin (que emplea como variablemanipulada este flujo
de salida del nodo V ) conel control de inventario de energa (el
cual se llevaa cabo mediante el flujo de energa que abandonael nodo
J).
Para el caso de la seccin de separacin(Figura 10) y, ms
concretamente, para el caso dela torre de destilacin, se considera
que los inven-tarios de materia y energa en cada una de las
fasespresentes en cada plato son autorregulables ya quese asume la
condicin de equilibrio as como deflujo molar constante. Por ello,
nuestra atencin secentra nicamente en el inventario de materia enel
fondo de columna y en cada uno de las nodos delseparador,
utilizndose los flujos de salida de cadauno de stos como variables
manipuladas. Parael caso de los inventarios de energa, la vlvulade
vapor presente en el caldern podra emplearsepara el control de
dicho inventario en la columna.
En relacin con el separador, ntese que su tem-peratura no puede
manipularse de forma directaal no disponer de ms corrientes de
refrigeracin ocalefaccin en dicha seccin del proceso. Por ello,y
como alternativa factible se propone el flujo deenerga a la entrada
del separador como candidatoa variable manipulada.
El siguiente paso en el proceso de diseo lo cons-tituye la
realizacin de los lazos conceptuales decontrol de inventario,
utilizando para ello las en-tradas y salidas fsicas del proceso. El
control deinventario, por s mismo, no garantiza la con-
MarinaText BoxLa Teora de Redes en Ingeniera de Control:
Aplicacin al Anlisis Dinmico y al Control de Procesos
MarinaText Box32
JLDIEZLine
-
VJ
L
C
J
V
L
C
c
r
D
D
S
SV
V
L
L
J D
D
S
SV
V
L
L
(a) (b) (c)
Figura 11. Lazos de control de inventario propuestos: a) Niveles
de materia y energa para la seccin dereaccin; b) Nivel de materia
para la seccin de separacin; c) Nivel de energa para la seccin
deseparacin.
vergencia de las variables intensivas a un puntode operacin
deseado. As pues, son necesariosalgunos lazos extra para asegurar
esta convergen-cia. A este respecto, en (Antelo et al. 2007a)
seproponen estructuras de control no lineal estables.
En este punto, es importante sealar que el pro-cedimiento
descrito no conduce a una nica con-figuracin descentralizada de
control sino a unconjunto de alternativas de control con la
particu-laridad de que todas ellas aseguran la estabilidaden el
sentido entrada-salida de la planta. Puede,por lo tanto,
considerarse como un procedimientoformal con el que definir el
conjunto de todos losposibles candidatos de control descentralizado
es-tables. Sobre este conjunto, puede elegirse aquellaconfiguracin
ptima de acuerdo con un objetivodado.
Es preciso indicar que en algunos casos los gradosde libertad
disponibles no son suficientes para im-plementar la estructura de
control necesaria quegarantice la convergencia tanto de las
variablesextensivas como de las intensivas. Es en estassituaciones
donde puede resultar conveniente elempleo de las referencias de los
controladores deinventario como nuevas variables manipuladas conlas
que completar el diseo de la estructura decontrol
descentralizado.
Por ltimo, resaltar que en aquellos procesos enlos que estn
presentes reacciones qumicas, estaestructura de control no tiene
porqu asegurar laestabilidad de las variables intensivas, puesto
quela alta no linealidad debida a la ley de accin demasas puede
provocar comportamientos comple-jos tales como fenmenos
oscilatorios o mltiplesestados estacionarios (Otero-Muras et al.
2006a).En este contexto, la teora CRNT, discutida en
la Seccin 2, se revela como una herramientade utilidad en la
deteccin de comportamientoscomplejos. Asimismo, y en combinacin con
la sis-temtica expuesta, cabe plantearse su aplicacinen el diseo de
lazos de control extra que asegurenla estabilidad global tanto de
las variables exten-sivas como de las intensivas.
4. CONCLUSIONES
En este trabajo se han propuesto las bases parauna representacin
formal generalizada de los sis-temas de proceso. Utilizando los
conceptos desa-rrollados por los autores en trabajos previos
(redesde proceso, redes de inventario, subredes disipa-tivas y
redes de reacciones), as como resultadosde la termodinmica, la
teora de sistemas y lateora de grafos, se establecen las jerarquas
yse definen los protocolos a seguir para unificarlos niveles
dinmicos existentes en un procesobajo una misma estructura formal.
Asimismo,se demuestra cmo el uso de esta herramientaconceptual
permite abordar diferentes problemasabiertos en el campo de la
ingeniera de con-trol: el anlisis dinmico de sistemas a partir
depropiedades grficas como la deficiencia, el anli-sis de
bifurcacin mediante un nuevo mtodo quepermite reducir el nmero de
parmetros crticosaprovechando propiedades estructurales de la redy
el diseo sistemtico de estructuras de control.
AGRADECIMIENTOS
Los autores agradecen la financiacin recibida delGobierno Espaol
(Proyecto MCyT PPQ2001-
JLDIEZLine
MarinaText BoxL. T. Antelo, I. Otero-Muras, J. R. Banga, A. A.
Alonso
MarinaText Box33
-
3643 y DPI2004-0744-C04-03) y de la Xunta deGalicia
(PGIDIT02-PXIC40209PN).
REFERENCIAS
Alonso, A.A., C.V. Fernandez y J.R. Banga(2004). Dissipative
systems: From physics torobust nonlinear control. International
Jour-nal of Robust and Nonlinear Control 14, 157179.
Alonso, A.A., J.R. Banga y B.E. Ydstie (2002).From irreversible
thermodynamics to a robustcontrol theory for distributed process
sys-tems. Journal of Process Control 12(4), 507517.
Alonso, A.A., J.R. Banga y I. Sanchez (2000). Pas-sive control
design for distributed process sys-tems: Theory and applications.
AIChE Jour-nal 46(8), 15931606.
Alonso, A.A. y B.E. Ydstie (1996). Process sys-tems, passivity
and the second law of ther-modynamics. Computers and Chemical
Engi-neering 20, 11191124.
Alonso, A.A. y B.E. Ydstie (2001). Stabilization ofdistributed
systems using irreversible thermo-dynamics. Automatica 37(11),
17391755.
Angeli, D., Jr. Ferrel y J.E. Sontag (2004). Detec-tion of
multistability, bifurcations and hys-teresis in a large class of
biological positive-feedback systems. PNAS 101(7), 18221827.
Antelo, L.T., I. Otero-Muras, J.R. Banga y A.A.Alonso (2007a). A
systematic approach toplant-wide control based on thermodynam-ics.
Computers and Chemical Engineering, enprensa.
Antelo, L.T., J.R. Banga y A.A. Alonso (2007b).Hierarchical
design of decentralized controlstructures applied to the tennessee
eastmanprocess. Enviado a Industrial and ChemistryEngineering
Research.
Demirel, Y (2002). Nonequilibrium thermody-namics. Elsevier:
Amsterdam.
Downs, J.J. y E.F. Vogel (1993). A plant-wide in-dustrial
process control problem. Computersand Chemical Engineering 17,
245255.
Farschman, C., K. Viswanath y B.E. Ydstie(1998). Process systems
and inventory con-trol. AIChE Journal 44(8), 18411857.
Feinberg, M. (1979). Lectures on chemical reac-tion networks.
Mathematics Research Center,University of Wisconsin.
Gorban, A.N., I.V. Karlin y A.Y. Zinovyev (2004).Invariant grids
for reaction kinetics. PhysicaA.
Hangos, K.M., A.A. Alonso, J.D. Perkins y B.E.Ydstie (1999).
Thermodynamic approach tothe structural stability of process
plants.AIChE Journal 45(4), 802816.
Otero-Muras, I., G. Szderkenyi, K.M. Hangosy A. A. Alonso
(2006a). Dynamic analysis
and control of biochemical reaction networks.aceptado en:
Matematics and Computers inSimulation.
Otero-Muras, I., J.R. Banga y A.A. Alonso(2006b). A method for
detecting bifurcationsin biochemical networks. Presentado en:
In-ternational Symposium on Systems Biology(SYSBIOL-2006).
Willems (1972). Dissipative dynamical systems.Arch. Rational
Mech. Anal. 45, 321393.
MarinaText BoxLa Teora de Redes en Ingeniera de Control:
Aplicacin al Anlisis Dinmico y al Control de Procesos
MarinaText Box34
JLDIEZLine
/ColorImageDict > /JPEG2000ColorACSImageDict >
/JPEG2000ColorImageDict > /AntiAliasGrayImages false
/CropGrayImages true /GrayImageMinResolution 300
/GrayImageMinResolutionPolicy /OK /DownsampleGrayImages true
/GrayImageDownsampleType /Bicubic /GrayImageResolution 300
/GrayImageDepth -1 /GrayImageMinDownsampleDepth 2
/GrayImageDownsampleThreshold 1.50000 /EncodeGrayImages true
/GrayImageFilter /DCTEncode /AutoFilterGrayImages true
/GrayImageAutoFilterStrategy /JPEG /GrayACSImageDict >
/GrayImageDict > /JPEG2000GrayACSImageDict >
/JPEG2000GrayImageDict > /AntiAliasMonoImages false
/CropMonoImages true /MonoImageMinResolution 1200
/MonoImageMinResolutionPolicy /OK /DownsampleMonoImages true
/MonoImageDownsampleType /Bicubic /MonoImageResolution 1200
/MonoImageDepth -1 /MonoImageDownsampleThreshold 1.50000
/EncodeMonoImages true /MonoImageFilter /CCITTFaxEncode
/MonoImageDict > /AllowPSXObjects false /CheckCompliance [ /None
] /PDFX1aCheck false /PDFX3Check false /PDFXCompliantPDFOnly false
/PDFXNoTrimBoxError true /PDFXTrimBoxToMediaBoxOffset [ 0.00000
0.00000 0.00000 0.00000 ] /PDFXSetBleedBoxToMediaBox true
/PDFXBleedBoxToTrimBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ]
/PDFXOutputIntentProfile () /PDFXOutputConditionIdentifier ()
/PDFXOutputCondition () /PDFXRegistryName () /PDFXTrapped
/False
/Description > /Namespace [ (Adobe) (Common) (1.0) ]
/OtherNamespaces [ > /FormElements false /GenerateStructure
false /IncludeBookmarks false /IncludeHyperlinks false
/IncludeInteractive false /IncludeLayers false /IncludeProfiles
false /MultimediaHandling /UseObjectSettings /Namespace [ (Adobe)
(CreativeSuite) (2.0) ] /PDFXOutputIntentProfileSelector
/DocumentCMYK /PreserveEditing true /UntaggedCMYKHandling
/LeaveUntagged /UntaggedRGBHandling /UseDocumentProfile
/UseDocumentBleed false >> ]>> setdistillerparams>
setpagedevice