Embed Size (px)
Citation preview
35
SISTEMA DE SIMULACIÓN Y ENTRENAMIENTO: VISUALIZACIÓN DE UN ENTORNO VIRTUAL DE NAVEGACIÓN
LAZO MARCOS 2,4, GARCÍA BAUZA CRISTIAN 1,3,4, D’AMATO JUAN PABLO 1,2,4, BORONI GUSTAVO 1,2,4 Y GRASSO OSCAR 1 1SIAG - Servicio de Análisis Operativo, Armas y Guerra Electrónica. 2CONICET - Consejo Nacional de Investigaciones Científicas y Técnicas 3CICPBA - Comisión de Investigaciones Científicas de la Provincia de Buenos Aires 4UNCPBA – Universidad Nacional del Centro de la Provincia de Buenos Aires
Resumen: El empleo de tecnología de simulación por parte de la Armada Argentina, resulta sumamente
necesario para el adiestramiento de personal militar y civil. En los últimos años la Armada Argentina ha
venido trabajando fuertemente en estos temas, vinculándose con institutos de investigación y
universidades nacionales mediante convenios de colaboración, que han derivado en el desarrollo de tres
simuladores de entrenamiento para diversas escuelas de la Armada: El simulador Melipal en operación en
Puerto Gral. Belgrano, el simulador de periscopio SIPER instalado en la Escuela Nacional de Submarinos
y Buceo, y el simulador de embarcación pesquera Melipal-P instalado en la Escuela Nacional de Pesca.
En este contexto, se presenta un estudio sobre la aplicación de nuevas tecnologías para el mejoramiento y
actualización de los simuladores de entrenamiento antes mencionados. Más concretamente se propone
una serie de herramientas graficas para el desarrollo de entornos virtuales de entrenamiento, capaces de
recrear todas las situaciones que se le presentan al operario a la hora de recibir la capacitación. Para esta
presentación se considera el sistema Melipal como caso particular de aplicación.
Palabras clave: simulación, entrenamiento, realidad virtual.
1. Introducción: descripción del Simulador Melipal
El simulador Melipal fue desarrollado en el año 2001 conjuntamente entre la
empresa Invap S.E (www.invap.net) y la Universidad Nacional del Centro de la Pcia. de
Buenos Aires - UNCPBA (www.unicen.edu.ar) [Melipal 2001][Boroni 2002]. En el año
2005 fue cedido a la Armada Argentina y actualmente se encuentra en funcionamiento
en la ESOA (Escuela de Oficiales de la Armada) en la Base Puerto Belgrano.
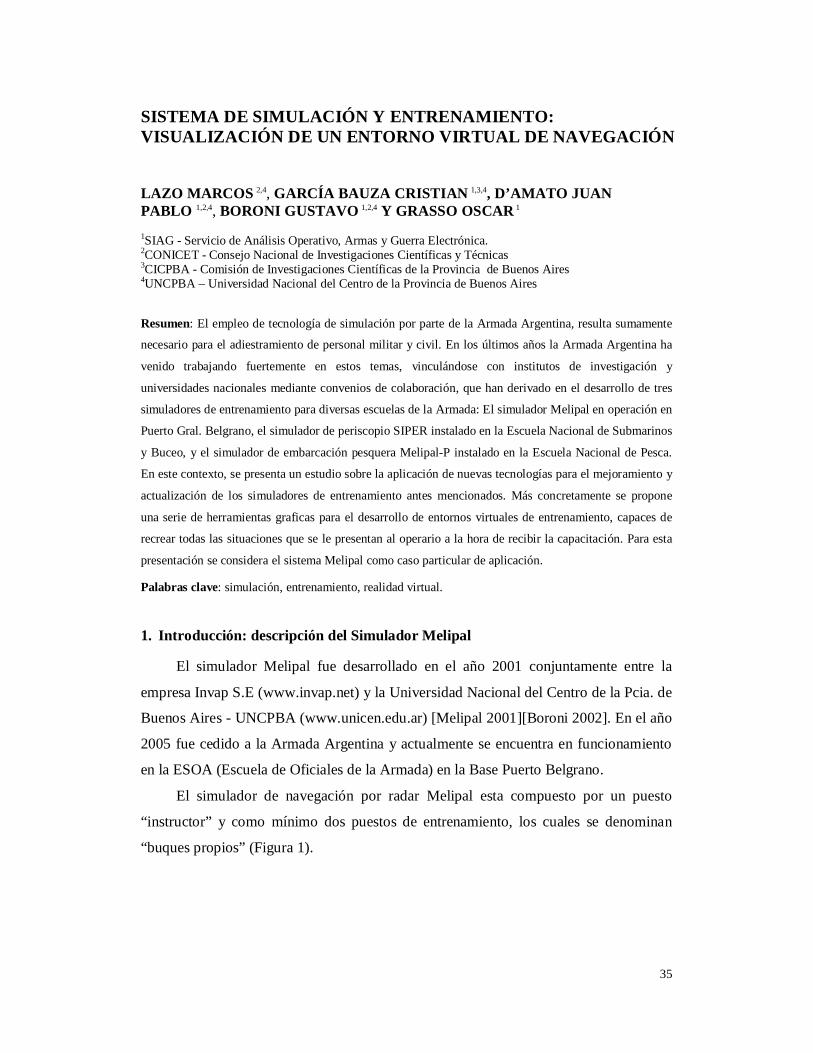
El simulador de navegación por radar Melipal esta compuesto por un puesto
“instructor” y como mínimo dos puestos de entrenamiento, los cuales se denominan
“buques propios” (Figura 1).
36
Figura 1. Arquitectura del simulador Melipal.
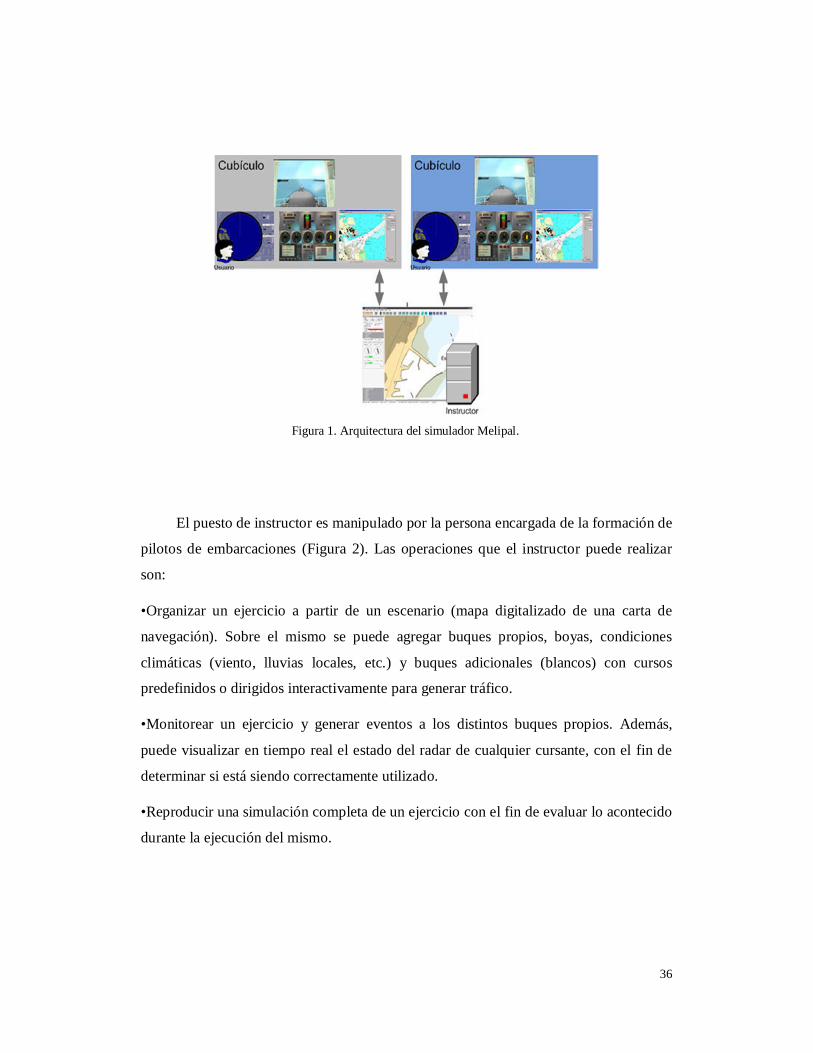
El puesto de instructor es manipulado por la persona encargada de la formación de
pilotos de embarcaciones (Figura 2). Las operaciones que el instructor puede realizar
son:
•Organizar un ejercicio a partir de un escenario (mapa digitalizado de una carta de
navegación). Sobre el mismo se puede agregar buques propios, boyas, condiciones
climáticas (viento, lluvias locales, etc.) y buques adicionales (blancos) con cursos
predefinidos o dirigidos interactivamente para generar tráfico.
•Monitorear un ejercicio y generar eventos a los distintos buques propios. Además,
puede visualizar en tiempo real el estado del radar de cualquier cursante, con el fin de
determinar si está siendo correctamente utilizado.
•Reproducir una simulación completa de un ejercicio con el fin de evaluar lo acontecido
durante la ejecución del mismo.
37
Figura 2. Interfaz del Módulo Instructor.
El puesto de entrenamiento o buque propio es la representación de un puente de
mando de un barco mediante un simulador. Sobre el mismo se dispone de la
funcionalidad que permite al aprendiz o cursante tener la sensación de estar en un
“puente real” y que a su vez pueda gobernar el buque y efectuar ejercicios de
observación, punteo y navegación en la pantalla de radar/ARPA [Otheguy 2002].
Para ello el puesto de entrenamiento esta provisto de los siguientes módulos o
elementos básicos:
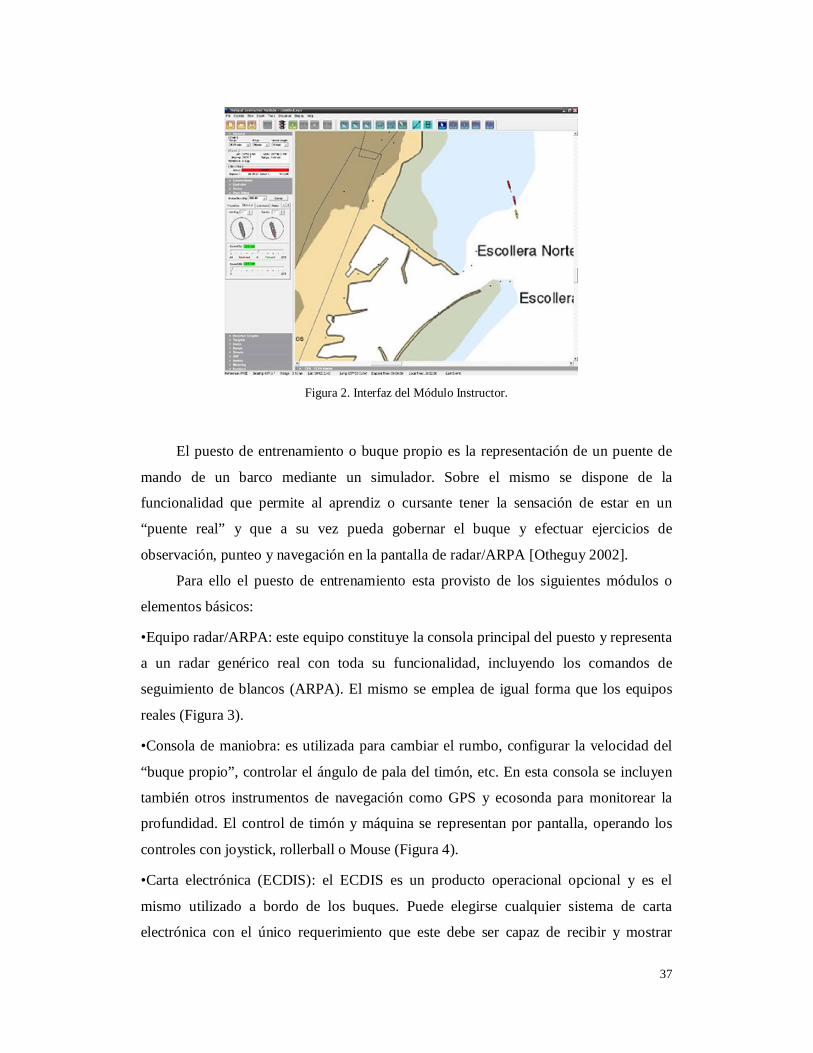
•Equipo radar/ARPA: este equipo constituye la consola principal del puesto y representa
a un radar genérico real con toda su funcionalidad, incluyendo los comandos de
seguimiento de blancos (ARPA). El mismo se emplea de igual forma que los equipos
reales (Figura 3).
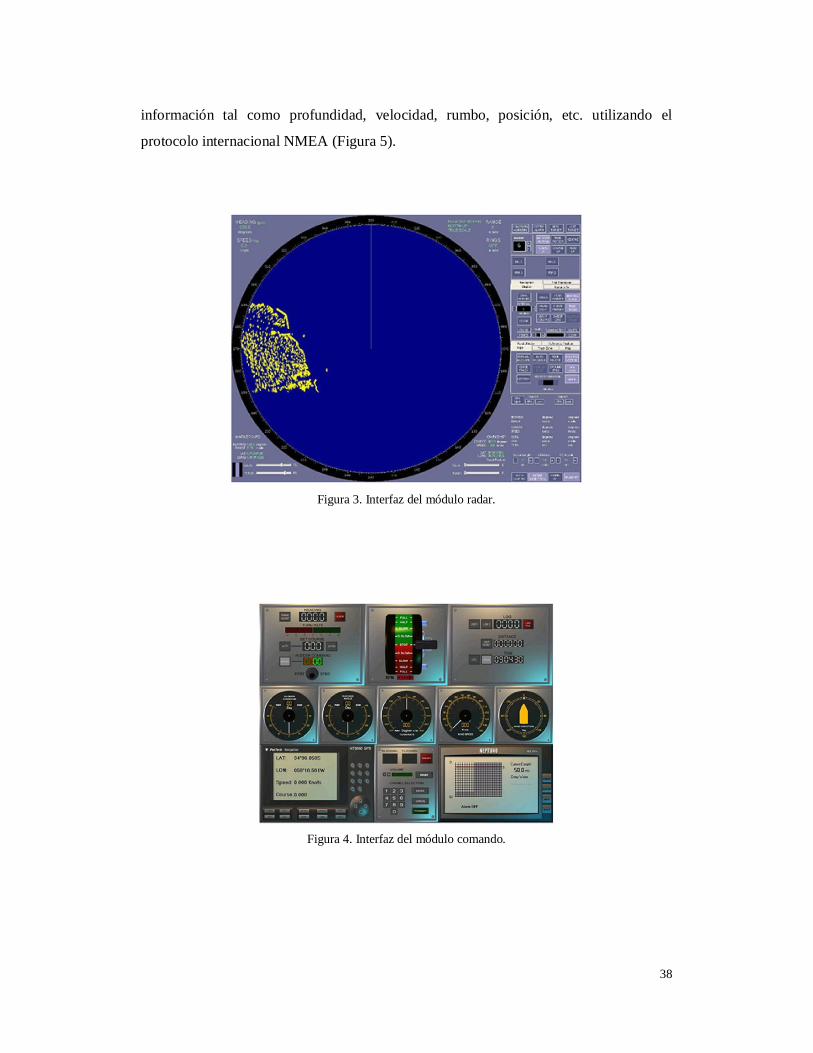
•Consola de maniobra: es utilizada para cambiar el rumbo, configurar la velocidad del
“buque propio”, controlar el ángulo de pala del timón, etc. En esta consola se incluyen
también otros instrumentos de navegación como GPS y ecosonda para monitorear la
profundidad. El control de timón y máquina se representan por pantalla, operando los
controles con joystick, rollerball o Mouse (Figura 4).
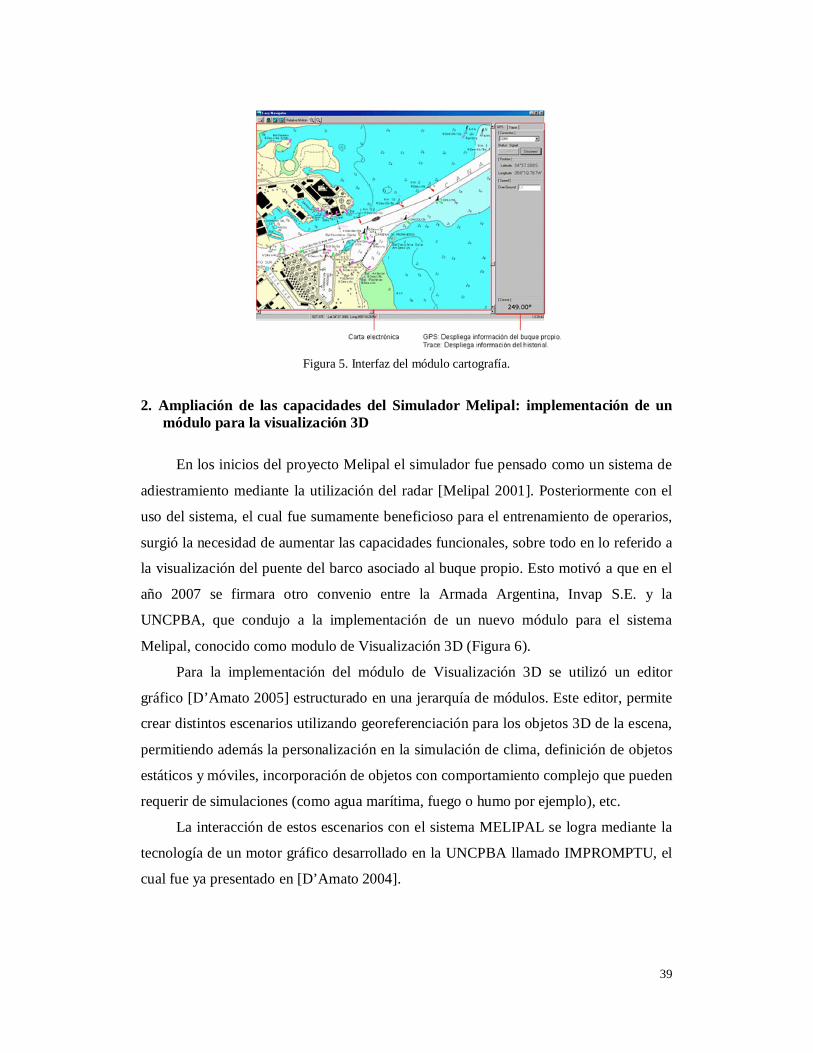
•Carta electrónica (ECDIS): el ECDIS es un producto operacional opcional y es el
mismo utilizado a bordo de los buques. Puede elegirse cualquier sistema de carta
electrónica con el único requerimiento que este debe ser capaz de recibir y mostrar
38
información tal como profundidad, velocidad, rumbo, posición, etc. utilizando el
protocolo internacional NMEA (Figura 5).
Figura 3. Interfaz del módulo radar.
Figura 4. Interfaz del módulo comando.
39
Figura 5. Interfaz del módulo cartografía.
2. Ampliación de las capacidades del Simulador Melipal: implementación de un módulo para la visualización 3D
En los inicios del proyecto Melipal el simulador fue pensado como un sistema de
adiestramiento mediante la utilización del radar [Melipal 2001]. Posteriormente con el
uso del sistema, el cual fue sumamente beneficioso para el entrenamiento de operarios,
surgió la necesidad de aumentar las capacidades funcionales, sobre todo en lo referido a
la visualización del puente del barco asociado al buque propio. Esto motivó a que en el
año 2007 se firmara otro convenio entre la Armada Argentina, Invap S.E. y la
UNCPBA, que condujo a la implementación de un nuevo módulo para el sistema
Melipal, conocido como modulo de Visualización 3D (Figura 6).
Para la implementación del módulo de Visualización 3D se utilizó un editor
gráfico [D’Amato 2005] estructurado en una jerarquía de módulos. Este editor, permite
crear distintos escenarios utilizando georeferenciación para los objetos 3D de la escena,
permitiendo además la personalización en la simulación de clima, definición de objetos
estáticos y móviles, incorporación de objetos con comportamiento complejo que pueden
requerir de simulaciones (como agua marítima, fuego o humo por ejemplo), etc.
La interacción de estos escenarios con el sistema MELIPAL se logra mediante la
tecnología de un motor gráfico desarrollado en la UNCPBA llamado IMPROMPTU, el
cual fue ya presentado en [D’Amato 2004].

40
El editor se conecta con una base de datos, la cual contiene un catálogo de
modelos 3D y un conjunto de imágenes satelitales de distintas zonas de entrenamiento.
De esta manera el usuario utiliza una de estas imágenes como base, en la cual va
colocando puntos georeferenciados a los que se les asignará un modelo 3D.
Este editor de escenarios, permite también cambiar la configuración de los estados
climáticos del día, tiempos de la simulación, etc. brindando la posibilidad de almacenar
los escenarios creados para que sean utilizados en los ejercicios de simulación.
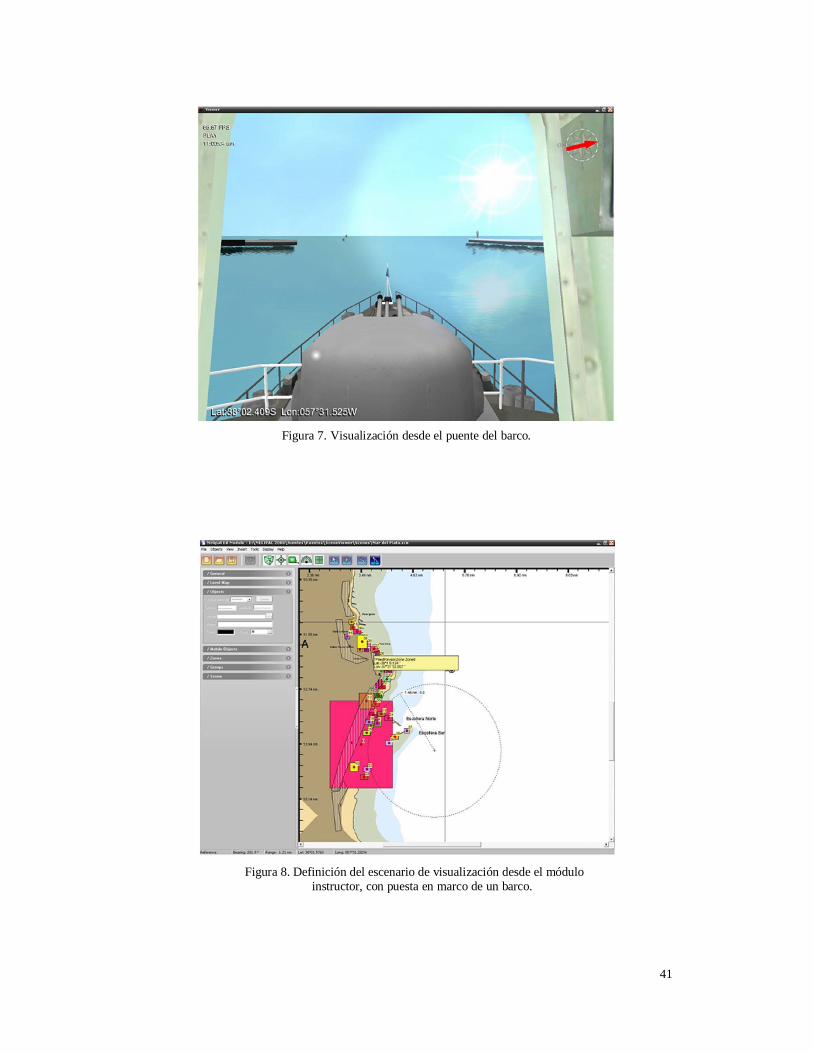
El módulo de visualización (Figura 7) recibe como datos de entrada todos los
objetos que están interviniendo en el entorno de navegación (buques, boyas, etc.)
(Figura 8) los cuales tiene asignados un modelo 3D previamente establecido, cargando
además los modelos 3D (edificios, bosques, etc.) de los escenarios creados mediante el
editor (Figura 9).
Figura 6. Puesto de entrenamiento con la incorporación del módulo de
visualización 3D (sobre el monitor superior) en la base Puerto Belgrano.
41
Figura 7. Visualización desde el puente del barco.
Figura 8. Definición del escenario de visualización desde el módulo
instructor, con puesta en marco de un barco.
42
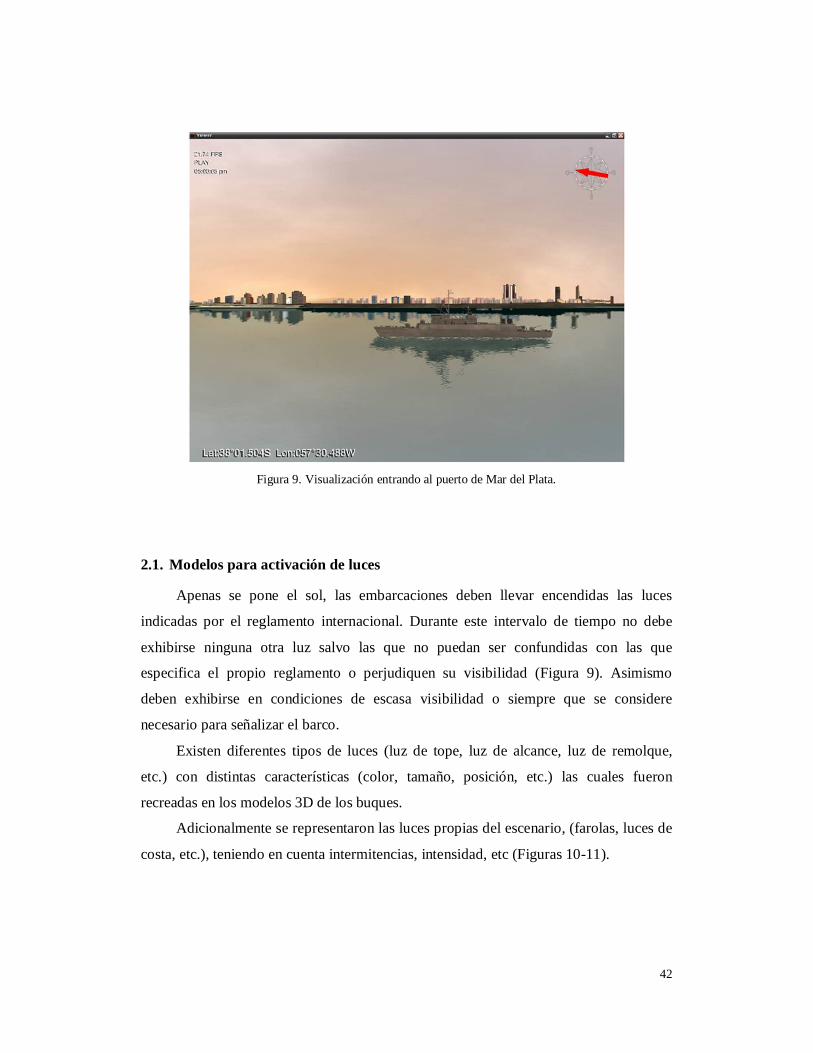
Figura 9. Visualización entrando al puerto de Mar del Plata.
2.1. Modelos para activación de luces
Apenas se pone el sol, las embarcaciones deben llevar encendidas las luces
indicadas por el reglamento internacional. Durante este intervalo de tiempo no debe
exhibirse ninguna otra luz salvo las que no puedan ser confundidas con las que
especifica el propio reglamento o perjudiquen su visibilidad (Figura 9). Asimismo
deben exhibirse en condiciones de escasa visibilidad o siempre que se considere
necesario para señalizar el barco.
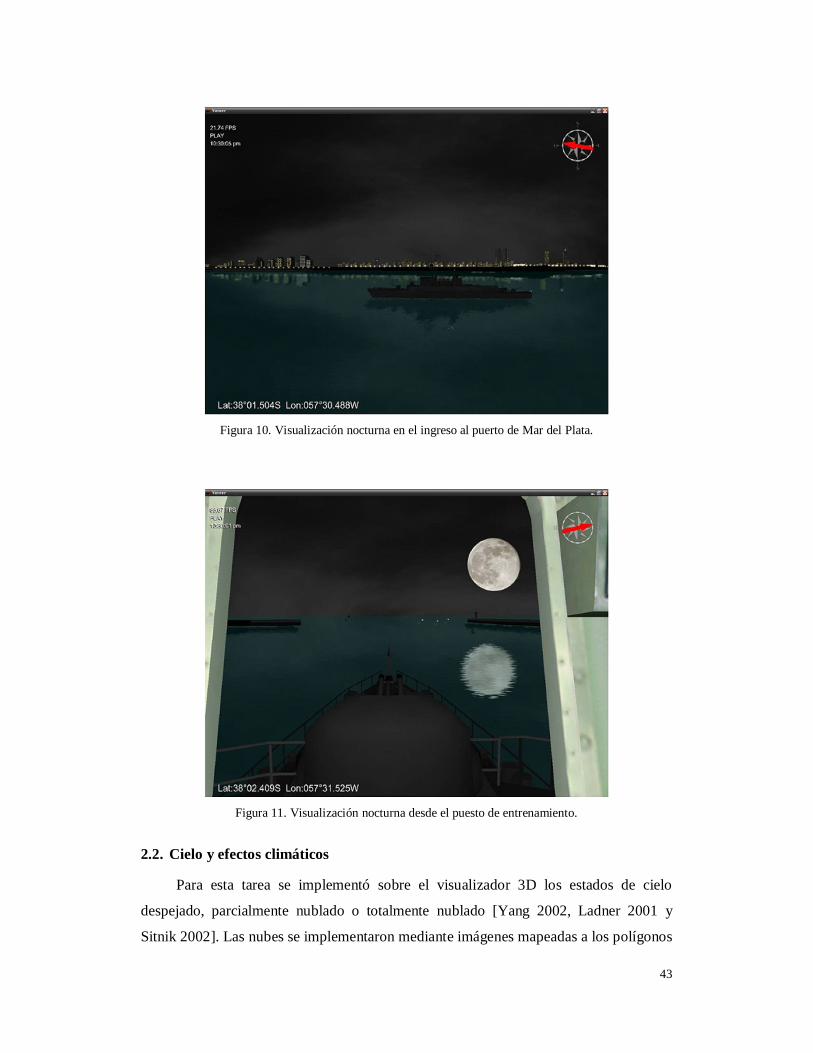
Existen diferentes tipos de luces (luz de tope, luz de alcance, luz de remolque,
etc.) con distintas características (color, tamaño, posición, etc.) las cuales fueron
recreadas en los modelos 3D de los buques.
Adicionalmente se representaron las luces propias del escenario, (farolas, luces de
costa, etc.), teniendo en cuenta intermitencias, intensidad, etc (Figuras 10-11).
43
Figura 10. Visualización nocturna en el ingreso al puerto de Mar del Plata.
Figura 11. Visualización nocturna desde el puesto de entrenamiento.
2.2. Cielo y efectos climáticos
Para esta tarea se implementó sobre el visualizador 3D los estados de cielo
despejado, parcialmente nublado o totalmente nublado [Yang 2002, Ladner 2001 y
Sitnik 2002]. Las nubes se implementaron mediante imágenes mapeadas a los polígonos
44
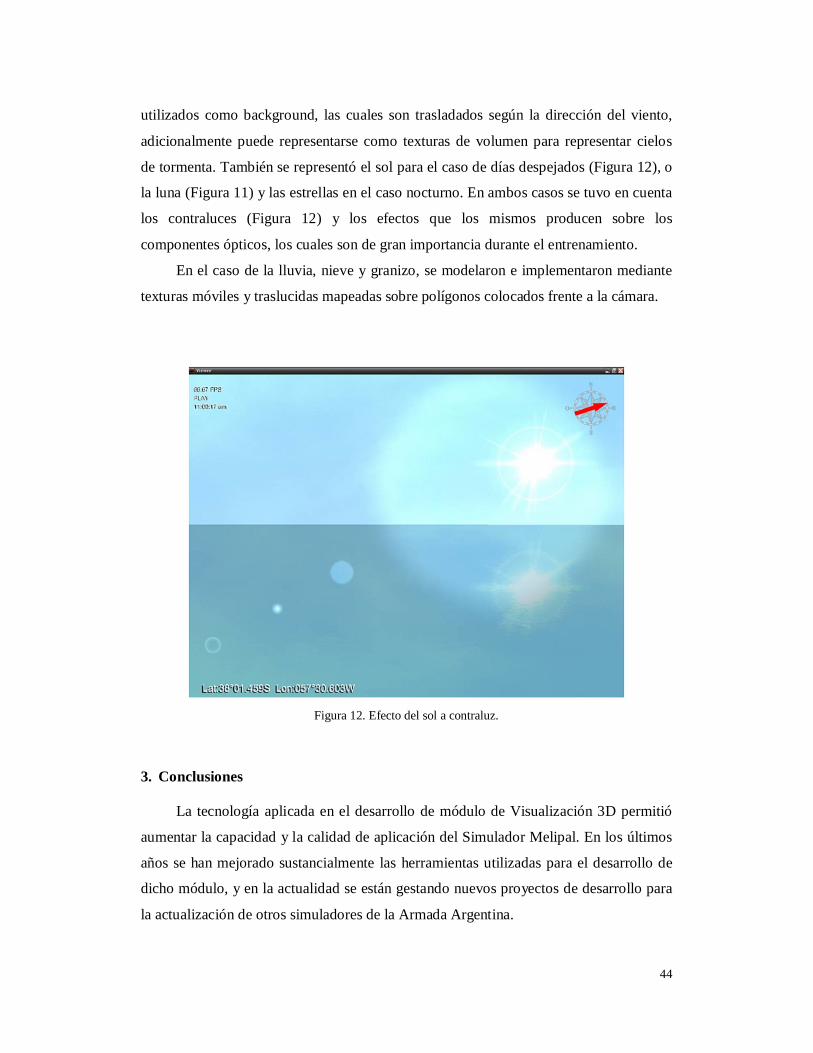
utilizados como background, las cuales son trasladados según la dirección del viento,
adicionalmente puede representarse como texturas de volumen para representar cielos
de tormenta. También se representó el sol para el caso de días despejados (Figura 12), o
la luna (Figura 11) y las estrellas en el caso nocturno. En ambos casos se tuvo en cuenta
los contraluces (Figura 12) y los efectos que los mismos producen sobre los
componentes ópticos, los cuales son de gran importancia durante el entrenamiento.
En el caso de la lluvia, nieve y granizo, se modelaron e implementaron mediante
texturas móviles y traslucidas mapeadas sobre polígonos colocados frente a la cámara.
Figura 12. Efecto del sol a contraluz.
3. Conclusiones
La tecnología aplicada en el desarrollo de módulo de Visualización 3D permitió
aumentar la capacidad y la calidad de aplicación del Simulador Melipal. En los últimos
años se han mejorado sustancialmente las herramientas utilizadas para el desarrollo de
dicho módulo, y en la actualidad se están gestando nuevos proyectos de desarrollo para
la actualización de otros simuladores de la Armada Argentina.
45
Bibliografía
D’ AMATO J., GARCÍA BAUZA C., Vénere M., “Simulación del entorno de una embarcación pesquera”, en 33º Jornadas Argentinas de Informática e Investig. Operativa, JAIIO 2004, Córdoba, 2004.
D’AMATO J., GARCÍA BAUZA C., VÉNERE M. “Editor de Escenarios para Aplicaciones de Realidad Virtual”. 34 JAIIO, 2005. Actas de las 34 Jornadas Argentinas de Informática e Investigación Operativa. ISSN 1666-1095
LADNER R., SHAW K. “An overview of 3D synthetic environment construction”. 3D Synthetic Environment Reconstruction (Series: Kluwer international series in engineering and computer science), 2001, Vol 611, pp 11-34.
SITNIK R., KUJAWINSKA M. “From cloud-of-point coordinates to three-dimensional virtual environment: the data conversion system”. Optical Engineering, 2002, Vol 41, Iss 2, pp 416-427.
YANG YJ., WANG XS., CHEN JX. “Rendering avatars in virtual reality: Integrating a 3D model with 2D images”. Computing in Science & Engineering, 2002, Vol 4, Iss 1, pp 86-91.
Melipal - Simulador en Tiempo Real de Navegación de Embarcaciones Basados en Imagen Radar”. Destinatario INVAP - Armada Argentina. Convenio de cooperación y desarrollo tecnológico Armada Argentina - INVAP – UNCPBA. Res. Nº: 1767/2001. Exp. Nº 1-11643/2001.
BORONI G., VÉNERE, M. “Un simulador distribuido para entrenamiento de operarios”.. Proceedings VIII Congreso Argentino de Ciencias de la Computación. 2002. ISBN Nº: 987-96-288-6-1. pp. 727-738.
OTHEGUY I., SORIANO M., BORONI G. y VÉNERE M. “Simulation in real time of radar of horizontal scan”. Proceedings of First South American Congress on Computational Mechanics. 2002. ISSN Nº: 1666-6070. pp. 1203-1212.
CV de GARCÍA BAUZA Cristian (expositor) Es Ingeniero de Sistemas, egresado de la UNICEN. Sus temas de investigación incluyen la visualización tridimensional de efectos naturales y la realidad virtual aplicada al entrenamiento de operarios, junto con la simulación computacional de comportamiento físico de objetos y la arquitectura de motores gráficos. Actualmente se encuentra realizando un Doctorado sobre simulación de fluidos para aplicaciones de tiempo real. Es docente de las cátedras Visualización Computacional I y II y ha trabajado en el desarrollo de numerosos simuladores de entrenamiento, entre ellos las versiones M, P y Ed de la familia MELIPAL, el Simulador de radar aéreo para el sistema ATLAS II y la actualización del radar terrestre RASIT, los cuales se están utilizando en las FFAA.





























