Embed Size (px)
Citation preview

Autor: Mario A. Jordán
Fundamentos de Control Realimentado
NOTA: Esta Copia de Power-Point es para uso exclusivo del Alumnado de FCR,2do. Cuatrimestre 2013. Contiene los conceptos fundamentales en el marco de la
Bibliografía disponible y es una contribución didáctica para el Curso. Esta versión está sujeta a futuras mejoras y extensiones. Para mostrar animaciones desde el comienzo presione F5
Clases 4 a 5 - Versión 1 - 2014

Herramientas
Transformada de Laplace
Descomposición en fracciones parciales
Teorema del Valor Inicial - Valor Final
Respuestas temporales parametrizadas
Matlab – Simulink
Zonas de estabilidad
Definición
2

Es una herramienta de análisis para Sistemas Lineales representados por una ecuación diferencial ordinaria a parámetros constantes.
L Transformada de Laplace
Es decir, su aplicación es válida si el sistema dinámico es:
LinealInvariante en el tiempo
L3

Definición de Transformada de Laplace para sistemas causales
Definición de Anti-Transformada
Lista de Transformadas de Laplacepara funciones de tiempo particulares
4

Ejemplos de Transformadas de Laplace
1) Sea f(t)=(t) una función de Dirac o función impulsiva
(t) e- st dt
0-
= e- s 0 = 1
2) Sea f(t)= 1(t) una función de Heaviside o función escalón
1(t) e- st dt
0-
= e- st dt
0=
1s
(e- s - e- s
0) =1s
-
L (t) = 1
L 1(t) = 1
5

Ejemplos de Transformadas de Laplace
(a/2) (e -(s-j)t – e (s+j)t) dt =
0
(e - – e
- 0) =1
s+j- 1s-j-(a/2) s
s2 + 2(a/2)
s
s2 + 2(a/2)L a cos(t) =
3) Sea f(t) = a cos(t) una función periódica cosenoidal
a cos(t) e- st dt
0-
= (a/2) (e jt - e - jt) e- st dt =
0
6

0
Tiempo (sec)
Res
pues
ta I
mpu
lsiv
a
0 2 4 6 8 10 12 14 16-0.1
-0.05
0.05
0.1
0.15
0.2
0.25
0.3
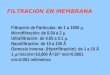
Respuesta Impulsiva de un Sistema Dinámico Lineal e Invariante en el Tiempo
d(t) d(t-2) d(t-4) d(t-6)
El sistema evoluciona decondiciones iniciales nulas
h(t) h(t-2) h(t-4) h(t-6)
7

0
Tiempo (sec)
Res
pues
ta I
mpu
lsiv
a
0 2 4 6 8 10 12 14 16-0.1
-0.05
0.05
0.1
0.15
0.2
0.25
0.3
d(t) d(t-2) d(t-4) d(t-6)
El sistema evoluciona decondiciones iniciales nulas
h(t)
h(t,2)
h(t,4)h(t,6)
Respuesta Impulsiva de un Sistema Dinámico Lineal y Variante en el Tiempo
8

Integral de SuperposiciónPrimeramente una función impulsiva o Delta de Dirac d(t) es:
es decir, u(t) es el resultado de una suma de impulsos u(t) d(t-t) para la variable t perteneciente a la recta real.
u u
Ahora pensemos en un sistema lineal con respuesta al impulso d(t) igual a h(t,t).
h(t,t) d (t=t)
u( )t (d t=t) u( )t h(t,t)
a u( )t (d t=t) a u( )t h(t,t)
SistemaDinámico
Variante en el Tiempo
9

Integral de Superposición
SistemaDinámico
Variante en el Tiempo
u(t0) (d t0=t0)
u(t0) h(t,t0) u(t1) (d t1=t1)
u(t1) h(t,t1)
u(tf) (d tf=tf) u(tf) h(t,tf) … …
u u
Superposiciónpara un tren denso
de impulsos u(t) (d t=t)
u(t2) (d t2=t2)
u(t2) h(t,t2)
0
Tiempo (sec)
Tre
n d
e p
ulso
s
0 2 4 6 8 10 12 14 16-0.1
-0.05
0.05
0.1
0.15
0.2
0.25
0.3
u(t)
10

SistemaDinámico
Invariante en el Tiempo
u(t0) (d t0=t0)
u(t0) h(t-t0) u(t1) (d t1=t1)
u(t1) h(t-t1)
u(tf) (d tf=tf) u(tf) h(t-tf) … …
u u
Superposiciónpara un tren denso
de impulsos u(t) (d t=t)
u(t2) (d t2=t2)
u(t2) h(t-t2)
0
Tiempo (sec)
Tre
n d
e p
ulso
s
0 2 4 6 8 10 12 14 16-0.1
-0.05
0.05
0.1
0.15
0.2
0.25
0.3
u(t)
-
Integral de Convolución11

Transformada de Laplace
Sea una Función de Transferencia
Factoricemos los polinomios numerador y denominador
Descomposición en fracciones parciales
Siendo el polinomio denominador el denominado Polinomio Característico:
12

Transformada de Laplace
Casos según el polinomio característico tenga:
Descomposición en Fracciones Parciales
1) Raíces simples
2) Raíces múltiples
3) Raíces complejas conjugadas
13

Transformada de Laplace
Cálculo de los coeficientes como residuos:
Se busca en la tabla de Transformadas la fracción simple:
Finalmente, la anti-transformada completa es:
1er. Caso: RAÍCES SIMPLES
y su anti-transformada:
14

Transformada de Laplace2do. Caso: RAÍCES MÚLTIPLES
15
Sea:
Los residuos se calculan así:

Transformada de LaplaceEjemplo de RAÍCES MÚLTIPLES
16
s2+1s2(s+2)
A2 =ddt s=0
= -1/4

Transformada de LaplaceOtra forma de calcular los residuos en RAÍCES MÚLTIPLES
17
Volviendo al ejemplo anterior.
Se iguala la F(s) con la función descompuesta en fracciones parciales.
Se lleva a una forma de igualación de polinomios y queda:

Transformada de LaplaceSigue ejemplo de RAÍCES MÚLTIPLES
18
Finalmente, la anti-transformada es:

Transformada de Laplace3er. Caso: RAÍCES COMPLEJAS CONJUGADAS
Ecuación de Euler
19

Transformada de Laplace3er. Caso: RAÍCES COMPLEJAS CONJUGADAS
20

Teorema del Valor InicialTransformada de Laplace
21
L

Teorema del Valor FinalTransformada de Laplace
El teorema sólo es válido en sistemas dinámicos estables!
22

Ganancia Estática
Transformada de Laplace
Aplicación del Teorema del Valor Final
Ejemplo. Sea la Función de Transferencia:
Entrada escalonada:
La Ganancia Estática esla respuesta al 1(t) en
23
Respuesta al escalón: G(s).1/s

Función de Transferencia y respuestas temporales
Salida de un sistema dinámico:
24
Respuesta Impulsiva:
Respuesta al escalón:
Y(s) = G(s) U(s)
U(s)=1 G(s) = H(s) L -1 G(s) = h(t)
U(s)=1/s Y(s) = G(s)/s L -1 G(s)/s = q(t)
Relación entre las respuestas impulsiva y al escalón:
dq/dt = h(t)

Polos y CerosTransformada de Laplace
Sea la Función de Transferencia:
Ceros:
Polos:
25

Polos Simples más un Cero adicionalTransformada de Laplace
Ejemplo. Sea la Función de Transferencia:
2 modos:lento y rápido
26

Polos y ceros realesTransformada de Laplace
Configuración de polos y ceros
Respuesta temporal al impulsocon CI cero
27

Polos complejos conjugadosTransformada de Laplace
Sea el sistema con un par de polos complejos conjugados
y d son los parámetros cartesianos
y n son los parámetros físicos
Polinomio característico:
28
2 Grados de Libertad, Relaciones entre coordenadas:

Polos complejos conjugadosTransformada de Laplace
Ubicación del par de polos complejos conjugados
29

Polos complejos conjugadosTransformada de Laplace
Ejemplos: Ubicación de los polos complejos respecto del eje vertical
30
sen =

Polos Complejos ConjugadosTransformada de Laplace
Expresión alternativa de la Función de Transferencia
Comparar con las dos versiones originales:
31
= n
+

Sistema dinámico de segundo ordenRespuesta impulsiva
Empleando la Tabla de Transformadas de Laplace sobre:
Transformada de Laplace
Con la anti-transformada (Respuesta Impulsiva):
32

Respuesta impulsiva parametrizadaSistema de 2do. orden subamortiguado
33

Respuesta al escalón parametrizadaSistema de 2do. orden subamortiguado
34
Y(s) = H(s) U(s)
U(s) = 1/s
= n
+s ( )Y (s)
Anti Transformada de Laplace (Respuesta al Escalón):
e- t evolventes

Zonas de comportamiento
oscilación natural uniforme
amortiguamientouniforme
evolvente uniforme
frecuenciade amortiguamientouniforme
s wd2
35

Respuestas Singulares36
e-te-t
-e-t
-e-t

Respuestas SingularesEjemplo de Función Oscilante Amortiguada con ceros
Buscamos dos Anti-Transformadas de Laplace de dos FT’s:
=1s wd=2
=1s wd=2
37

Adición de Ceros en Sistemas de polos simples
Ejemplo:
Dado un sistema dinámico:
y el mismo sistema pero con un cero añadido:
G(s) = 2 (s+1) (s+2)
= 2
(s+1)
2
(s+2)-
G(s) = =
(s+1) (s+2)
(s+)2 -
(s+2)(-2)
(s+1)(-1)
2 ( (
38

Adición de Ceros en Sistemas de polos simples
Conclusión:
39
- Para la descomposición en fracciones simples de la función de transferencia sin ceros, la suma de los residuos da cero.Por el teorema del Valor Inicial, esto implica que la respuestaimpulsiva empieza de cero
- Por el contrario, para la descomposición en fracciones simples de la función de transferencia con ceros, la suma de los residuos es en general distinta de cero.Por el teorema del Valor Inicial, esto implica que la respuestaimpulsiva por lo general empieza de un valor distinto de cero
- Este es el efecto de añadir un cero a la función de polos simples.

jws
ss
-1-2
=a 1.1=a 1.9
=a 1.5
=10a =a 0.5
0 20 40 60 80 100 120-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
tiempo
Adición de Ceros en Sistemas Amortiguados40
t=-1a

ConclusiónMientras más dominante es el cero estable (más a la derecha), tanto más marcado es el efecto de derivación sobre la respuesta original
Mientras menos dominante es el cero estable (más a la izquierda), tanto menos notable es el efecto de derivación sobre la respuesta original
Un cero inestable proporciona un arranque en sentido inverso, propiedad del sistema dinámico conocida como fase no-mínima
En general, se puede mejorar la respuesta original con la incorporación de un cero estable en su función de transferencia.Su ubicación es óptima a la derecha de los polos reales originales.
Adición de Ceros en Sistemas Amortiguados41

Dado un sistema dinámico:
G(s) = 1
s2 + 2 s +1
y el mismo sistema pero con un cero añadido:
G(s) = (1/) (s+ )
s2 + 2 s +1
Sus respuestas dinámicas son comparadas a continuación
Adición de Ceros en Sistemas Subamortiguados
42

jws
s=a 1
=a .5
=a 5=a 100 =a -1
G(s) sin cero es equivalente a desplazar el cero infinitamente a la izquierda:
1
3
-1
-0.5
0
0.5
1
1.5
2
2.5
0 20 40 60 80 100 120
tiempo
Adición de Ceros en Sistemas Subamortiguados43

y el sistema con cero añadido en fracciones parciales es:
G(s) = +s
s2 + 2 s +11
0 20 40 60 80 100 120-1
-0.5
0
0.5
1
1.5
2
2.5
tiempo
Respuestas impulsivas
1s2 + 2 s +1
Nuevamente, el sistema dinámico original es:
G(s) = 1
s2 + 2 s +1
Adición de Ceros en Sistemas Subamortiguados44

Mientras más dominante es el cero estable (más a la derecha), tanto más marcado es el efecto de derivación sobre la respuesta original
Mientras menos dominante es el cero estable (más a la izquierda), tanto menos notable es el efecto de derivación sobre la respuesta original
Un cero inestable proporciona un arranque en sentido inverso, propiedad del sistema dinámico conocida como fase no-mínima
En general, se puede mejorar la respuesta original con la incorporación de un cero estable en su función de transferencia, aunque hay queubicarlo aproximadamente cerca pero a la derecha de la parte real de los polos complejos conjugados.
El efecto de un cero añadido incorpora una segunda componente sumada a la respuesta original. Esta segunda componente es la derivación de la respuesta impulsiva original
ConclusiónAdición de Ceros en Sistemas Subamortiguados45

La influencia de un cero que se acerca al eje imaginario por la izquierda desde s=- produce un aumento del sobrepico en forma hiperbólica
Adición de Polos y Ceros en Sistemas Subamortiguados
=- =-0
46

La influencia de un polo real que se acerca al eje imaginario por la izquierda desde s=- produce un crecimiento de la respuesta inicial cada vez más rápido. Sea:
Adición de Polos y Ceros en Sistemas Subamortiguados
a =- a =0
47

MATLABHerramienta de Análisis, Simulación y Diseño
+MATLAB Ejercicio 1. Simulación de un Sistema de
2do. Orden Subamortiguado(FCR_ejercicio_1.m)
Ejercicio 2. Orientación de un Sistema Satelital(FCR_ejercicio_2.m)
Elección de Variables de Estado: X T=[q, =q w]
.Sistema Satelital: modelo ODE I = q I w = Fc d + MD
.. .
Descripción en espacio de estado:Parámetros:
Ejercicio 3. Orientación de un Sistema Satelital(FCR_ejercicio_3.m)
48

MATLABHerramienta de Análisis, Simulación y Diseño
Ejercicio 4. Aplicación de una fuerza de pulso finito al sistema satelital
(FCR_ejercicio_4.m)
Sistema Satelital: modelo ODE I = q I w = Fc d + MD
.. .
Ejercicio 5. Cambio de ángulo de orientación del satélite en sentido horario
(FCR_ejercicio_5.m)
49

Posición de los PolosZonas de estabilidad
Ubicación de polos vs. Respuesta Impulsiva
50




![LHCb-中国组研究进展 - IHEPindico.ihep.ac.cn/event/6062/session/1/contribution/10/material/slide… · t modulo 2π / ∆m s [ ps ] 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 mix A-0.4-0.2](https://img.pdfslide.es/doc/110x75/5f06b50e7e708231d419559d/lhcb-ccce-t-modulo-2-am-s-ps-0-005-01-015-02-025.jpg)