Embed Size (px)
Citation preview

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 1/28
BBu u sseess d d ee C C aamm p poo eenn eel l C C oonnt t r r ool l d d ee P P r r ooc c eessooss I I nnd d u u sst t r r i i aal l eess
A Au u t t oor r aa:: S S i i l l v v i i nnaa G G r r u u p paal l l l i i
LLaabboor r aat t oor r i i oo d d ee I I nnsst t r r u u mmeennt t aac c i i óónn I I nnd d u u sst t r r i i aal l J J u u nni i oo 2 2 0 0 0 0 7 7

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 2/28
Í Í nnd d i i c c ee P P á á g g i i nnaa
IInnttr r oodduucccciióónn 11
A Assppeeccttooss HHiissttóór r iiccooss 11
Entradas y Salidas en el Nivel Inferior: Buses de Campo 33
Bus de campo: Definición - Características generales 5 5
Clasificación de los Buses de Campo 6 6
Buses de Campo en el Mercado
Description General
PPr r oof f iibbuuss 99
WWoor r llddFFIIPP 112 2
HHaar r tt 1133
FFiieellddbbuuss FFoouunnddaattiioonn 117 7
A Annee x x ooss::
A Anneexxoo A A -- CCoommuunniiccaacciióónn SSeer r iiaall.. EEssttáánnddaar r eess :: RRSS--223322,, RRSS--442222 ,, RRSS--448855 2 2 11
Anexo B - Modelo de Capas OSI 2 2 44
A Anneexxoo CC -- Comparación de características entre algunos buses y protocolos 2 2 6 6

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 3/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 1
Buses de Campo en el Control de Procesos Industriales
Introducción
La medición y el control en la industria son muy importantes tanto desde el punto de vista delfuncionamiento correcto del proceso como de la consideración del balance adecuado entrecostos y producto final (relación calidad/precio).
El desarrollo de los sistemas de control se produce simultáneamente con el manejo y laevolución de los sistemas de comunicaciones. Esto se manifiesta en diferentes niveles deabstracción sobre integración y producción de acuerdo a la filosofía de la "Computer lntegrated Manufacturing" -CIM.
La necesidad de disponer de dispositivos inteligentes para realizar el control o la supervisiónremota, tanto de procesos de fabricación, como de almacenamiento o distribución se hacecada vez mas importante con el transcurso del tiempo. Es así que aparecen en escena los
buses de campo como un sistema de transmisión de datos que simplifica enormemente lainstalación y operación de máquinas y equipamientos industriales utilizados en procesos deproducción. Existen muchos tipos diferentes de buses en uso y muchos son altamentedependientes de las aplicaciones.
Hoy, los sistemas o redes de comunicación empleados en entornos industriales seencuentran sometidos a una problemática específica que condiciona enormemente su diseñoe implementación.
Aspectos Históricos
Hasta la década de los 70, puede decirse que el control de un proceso productivo se basaba
en la existencia de un lazo de control analógico para cada variable del sistema, y comoconsecuencia, se tenían tantos lazos de control como variables a controlar. Esta situacióndaba lugar a la aparición de grandes paneles de control, con un gran número de variablesdinámicas. En estas condiciones, al operador del sistema le resultaba difícil supervisar adecuadamente todo el proceso productivo.
Hacia los años 70 se comenzaron a introducir las computadoras en el control de procesos,fundamentalmente para realizar tareas de vigilancia. La computadora se encargaba desupervisar las variables controladas para detectar niveles anómalos, generando entonces lasalarmas pertinentes y emitiendo a partir de ellas los informes sobre el estado del sistema.Posteriormente, se comenzó a incluir también en las labores de control, ya que debido a sucapacidad de cálculo podía sustituir al panel de control, y tener programados los bucles decontrol. El principal inconveniente que se planteaba era la mayor debilidad del sistema alexistir un punto de fallo crítico, la propia computadora. Una posible solución consistía enduplicar el equipo, disponiendo de una estación de respaldo, comunicado con el primero, ycapaz de seguir con el control del proceso en caso de fallo.
El desarrollo de los microprocesadores, microcontroladores y los controladores lógicosprogramables (PLCs) dieron lugar a la aparición del control distribuido. En este tipo deesquema, un PLC o un microprocesador controla uno o más lazos del sistema, realizando uncontrol directo de los mismos, y se comunica con otros elementos de su nivel y con el nivelsuperior de control o supervisión. El fallo de un elemento del nivel superior no comprometenecesariamente el funcionamiento de los PLCs, minimizando su incidencia en el proceso.
Además, la aparición de sensores inteligentes y elementos programables (máquinas decontrol numérico, PLCs, robots, etc.) que favorecen la automatización y flexibilizan el procesoproductivo, demanda la necesidad de permitir su programación y control de forma remota.
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 4/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 2
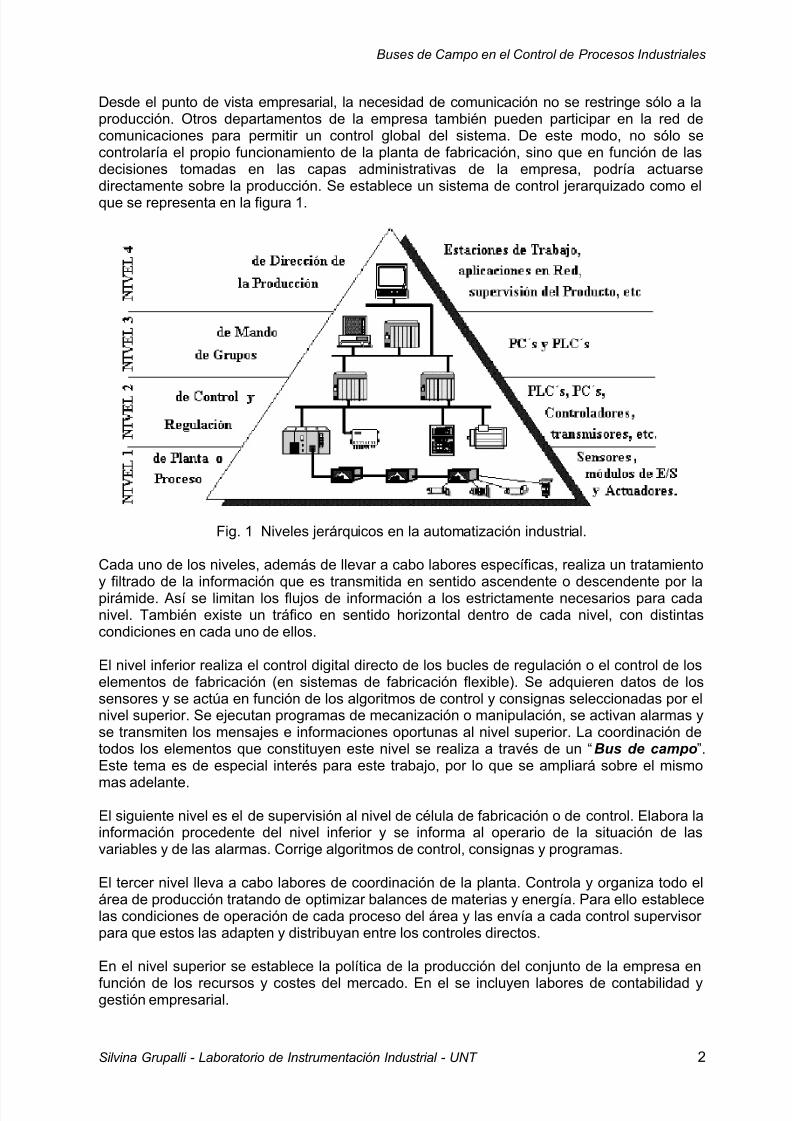
Desde el punto de vista empresarial, la necesidad de comunicación no se restringe sólo a laproducción. Otros departamentos de la empresa también pueden participar en la red decomunicaciones para permitir un control global del sistema. De este modo, no sólo secontrolaría el propio funcionamiento de la planta de fabricación, sino que en función de lasdecisiones tomadas en las capas administrativas de la empresa, podría actuarsedirectamente sobre la producción. Se establece un sistema de control jerarquizado como elque se representa en la figura 1.
Fig. 1 Niveles jerárquicos en la automatización industrial.
Cada uno de los niveles, además de llevar a cabo labores específicas, realiza un tratamiento
y filtrado de la información que es transmitida en sentido ascendente o descendente por lapirámide. Así se limitan los flujos de información a los estrictamente necesarios para cadanivel. También existe un tráfico en sentido horizontal dentro de cada nivel, con distintascondiciones en cada uno de ellos.
El nivel inferior realiza el control digital directo de los bucles de regulación o el control de loselementos de fabricación (en sistemas de fabricación flexible). Se adquieren datos de lossensores y se actúa en función de los algoritmos de control y consignas seleccionadas por elnivel superior. Se ejecutan programas de mecanización o manipulación, se activan alarmas yse transmiten los mensajes e informaciones oportunas al nivel superior. La coordinación detodos los elementos que constituyen este nivel se realiza a través de un “Bus de campo”.Este tema es de especial interés para este trabajo, por lo que se ampliará sobre el mismo
mas adelante.
El siguiente nivel es el de supervisión al nivel de célula de fabricación o de control. Elabora lainformación procedente del nivel inferior y se informa al operario de la situación de lasvariables y de las alarmas. Corrige algoritmos de control, consignas y programas.
El tercer nivel lleva a cabo labores de coordinación de la planta. Controla y organiza todo elárea de producción tratando de optimizar balances de materias y energía. Para ello establecelas condiciones de operación de cada proceso del área y las envía a cada control supervisor para que estos las adapten y distribuyan entre los controles directos.
En el nivel superior se establece la política de la producción del conjunto de la empresa en
función de los recursos y costes del mercado. En el se incluyen labores de contabilidad ygestión empresarial.

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 5/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 3
La consecución de la implementación completa de todos estos niveles da lugar a la aparicióndel CIM (Computer Integrated Manufacturing). El principal inconveniente para el logro de estaintegración se encuentra en los problemas que presenta la intercomunicación de loselementos de la base de la pirámide.
Entradas y Salidas en el Nivel Inferior: Buses de Campo
Aunque existan protocolos que pretenden bajar el uso de la red local (Ethernet) hasta losniveles inferiores de un sistema de control distribuido, no dejan de ser protocolos quemanejan grandes volúmenes de datos para la transmisión de archivos y no resultanapropiados para trabajar en tiempo real , como lo exige el nivel de mando de las máquinascon tiempos de reacción muy cortos o en la utilización de transductores y actuadores. Paraeste tipo de elementos se requiere una red de nivel inferior, con protocolo ágil, cableado fácil ,barato y que permita comunicar periféricos de bajo nivel a un control maestro. Esta red localde nivel inferior se denomina bus de campo (fieldbus).
El bus de campo constituye el nivel más simple y próximo al proceso dentro de la estructurade comunicaciones industriales. Típicamente son redes digitales, bidireccionales, multipunto,montadas sobre un bus serie, que conectan dispositivos de campo (PLCs, transductores,actuadores y sensores, etc) utilizando un protocolo mínimo para gestionar la comunicaciónentre ellos. Este último hecho no le resta la fiabilidad y posibilidades de expansión a estenivel. Cada dispositivo de campo incorpora cierta capacidad de proceso, que lo convierte enun dispositivo inteligente, manteniendo siempre un coste bajo. Estos elementos seráncapaces de ejecutar funciones simples de autodiagnóstico, control o mantenimiento,además, los buses propuestos más recientemente contemplan la posible integración de losmismos a una estructura de comunicaciones jerárquicamente superior y más potente, talcomo se requiere en los sistemas de control distribuido.
Antes de que apareciesen los buses de campo, la comunicación tradicional en este ámbito sebasaba casi exclusivamente en tecnología de señal analógica de lazo de corriente 4-20mAcon conexiones punto a punto, es decir cada elemento de campo se conectaba directamentea su controlador o terminal específico de éste. Así, una topología tradicional a nivel de campopodría presentar un aspecto como el mostrado en la figura 2.
Fig. 2.- Topología de un sistema tradicional en el nivel de planta o proceso.
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 6/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 4
Sin embargo, la automatización del control de procesos ha generado unas necesidades decomunicación entre equipos y sistemas que no pueden ser cubiertas satisfactoriamente por comunicaciones del tipo 4-20mA o similares.La característica básica para que una red de comunicación pueda denominarse propiamentebus de campo es que permita intercambiar órdenes y datos entre productos de un mismo ode distintos fabricantes a través de un protocolo reconocido por cada uno de los nodos.
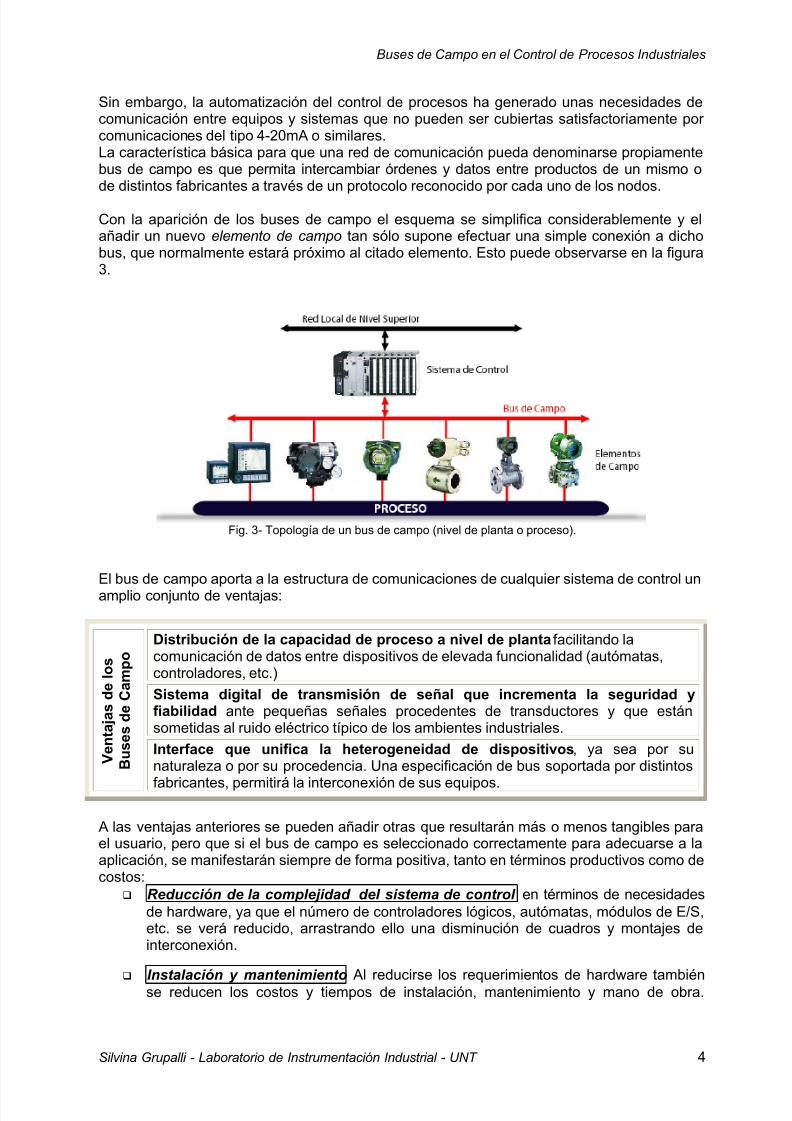
Con la aparición de los buses de campo el esquema se simplifica considerablemente y elañadir un nuevo elemento de campo tan sólo supone efectuar una simple conexión a dichobus, que normalmente estará próximo al citado elemento. Esto puede observarse en la figura3.
Fig. 3- Topología de un bus de campo (nivel de planta o proceso).
El bus de campo aporta a la estructura de comunicaciones de cualquier sistema de control unamplio conjunto de ventajas:
Distribución de la capacidad de proceso a nivel de planta facilitando lacomunicación de datos entre dispositivos de elevada funcionalidad (autómatas,controladores, etc.)
Sistema digital de transmisión de señal que incrementa la seguridad yfiabilidad ante pequeñas señales procedentes de transductores y que estánsometidas al ruido eléctrico típico de los ambientes industriales.
V e n t a j a s d e l o s
B u s e s d e C a m p o
Interface que unifica la heterogeneidad de dispositivos, ya sea por sunaturaleza o por su procedencia. Una especificación de bus soportada por distintos
fabricantes, permitirá la interconexión de sus equipos.
A las ventajas anteriores se pueden añadir otras que resultarán más o menos tangibles parael usuario, pero que si el bus de campo es seleccionado correctamente para adecuarse a laaplicación, se manifestarán siempre de forma positiva, tanto en términos productivos como decostos:
Reducción de la complejidad del sistema de control en términos de necesidadesde hardware, ya que el número de controladores lógicos, autómatas, módulos de E/S,etc. se verá reducido, arrastrando ello una disminución de cuadros y montajes deinterconexión.
Instalación y mantenimiento Al reducirse los requerimientos de hardware tambiénse reducen los costos y tiempos de instalación, mantenimiento y mano de obra.
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 7/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 5
Afrontar nuevas instalaciones es mucho más rápido, sencillo y seguro, así como lastareas de diagnóstico y verificación de errores de conexión.
Proyecto y diseño Como consecuencia de la disminución de la complejidad delsistema de control, el proyecto y diseño resulta mucho más sencillo, rápido y barato,reduciéndose drásticamente el número de elementos que aparecen en los diagramas
y esquemas: instrumentos, cajas de conexión y terminales, cableados, etc.
Reducción de costos. Posteriores modificaciones, ampliaciones y rediseños sellevan a cabo con mayor facilidad y economía.
Flexibilidad para elegir proveedores. La selección de un bus de extendidoreconocimiento y aceptación, permite intercambiar equipos de planta entre catálogosde distintos proveedores, sin necesidad de conocer cuestiones técnicas de bajo nivel,sobre todo referentes a conexión y compatibilidad.
Tiempos de mantenimiento y pérdidas de producción reducidos, debido a laexistencia de procedimientos y herramientas de alto nivel para diagnóstico y
búsqueda de errores.
Bus de campo: Definición - Características generales
El bus de campo (fieldbus, en inglés) es la suma de un protocolo y una tecnología decomunicación cuyo resultado es una red industrial de carácter digital y que transportainformación, generalmente, en banda base.Inicialmente era utilizado como medio de comunicación entre sensores, actuadores,controladores digitales básicos y autómatas de clase baja; pero debido a la mejora en lavelocidad de transmisión y la ínfima tasa de errores, el bus de campo ha pasado a ser considerado como una red local en los entornos de planta, por lo que suele verse haciendo
funciones que antes correspondían exclusivamente a las LAN (Local Area Network).
Dando por hecho que un bus de campo aporta a las comunicaciones industriales todo loanteriormente citado, se le debe exigir, además:
- Interconectividad : equipos de diferentes fabricantes pueden ser conectadosfísicamente a un mismo bus.- Interoperabilidad : posibilidad de intercambiar con éxito información entre equiposde diferentes suministradores.- Intercambiabilidad : equipos de cualquier procedencia pueden ser reemplazadospor equipos funcionalmente equivalentes de otras procedencias.
El mejor aval para que un bus de campo cumpla con los requisitos anteriores será el respetoa la estructura de niveles OSI (Open Systems Interconnection), que aunque pensada paraotros tipos de redes de más entidad, es perfectamente asumible por los protocolos de estetipo de redes industriales. (Ver Anexo B: Modelo de Capas)
Hasta el momento han sido varios los intentos de crear un estándar para el bus de campo,pretendiendo siempre conseguir un enlace multipunto entre elementos cuya principal finalidadson las tareas de control y que suelen tener una capacidad de comunicación limitada.
Las característica generales más comunes de los buses de campo son las siguientes:- Los estándares de comunicación a nivel de bus de campo suelen cubrir sólo una parte delmodelo OSI, concretamente los niveles 1 (Físico), 2 (Enlace) y el 7 (Aplicación). El resto de
niveles no son imprescindibles. (Figura 4)

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 8/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 6
Nivel 7 – Aplicación Funciones y Librerías estándar
Niveles 3 al 6 No Implementados
Nivel 2 – Enlace de Datos Control de Enlace Lógico (LLC)Control de Acceso al Medio (MAC)
Nivel 1 – Físico Tipos de conectores, Niveles de Tensión,medios de transmisión, etc.
Fig.4- El bus de campo según el modelo de niveles o capas ISO/OSI.
En general, las especificaciones de un determinado bus admiten más de un tipo de conexiónfísica de entre las normalizadas. Sin embargo, la más común es un bus semiduplex,comunicación en bada base, tipo RS-485. Se encuentran también opciones que trabajan conRS-422 y conexiones en lazo de corriente. (ver Anexo A)
Lo que realmente define el tipo de bus y le da nombre, son los dos grupos en que se dividenlas tareas asignadas al nivel de enlace de datos del modelo OSI (nivel 2): MAC (Control de Acceso al Medio) y LLC (Control de Enlace Lógico). - El nivel de aplicación (7), dirigido alusuario, suele ser propio de cada fabricante, quienes crean programas de gestión ypresentación dedicados a una gama específica de productos.
Salvo rara excepción, todos los buses de campo suelen utilizar comunicación serie
asincrónica, con un rango definido de velocidades que permitan acotar los tiempos derepuesta (funcionalidades determinísticas).
En la mayor parte de los buses de campo, el protocolo está previsto para gestionar una redcon estructura lógica de tipo maestro-esclavo, donde el control de la red lo tiene siempre elmaestro. Existen, sin embargo, algunos buses más recientes que proponen una estructuracon la posibilidad de maestro flotante o multimáster.
Aunque la mayor parte del tráfico es periódico, gestionan el tráfico aperiódico de forma muyeficiente y su capacidad para gestionar mensajes está orientada a mensajes cortos o depequeño tamaño.
Poseen mecanismos de control de errores muy optimizados y redundancia para evitar fallosque dejen al bus fuera de servicio.
Clasificación de los buses de campo Al ser el control de procesos industriales un mercado que genera unas grandes expectativaseconómicas, todos los fabricantes de equipos para este sector intentan acaparar una partedel mismo. Esto nos sitúa ante un mercado con una gran diversidad de buses de campo,prácticamente incompatibles unos con otros, lo cual ha llevado a plantear la necesidad decrear un bus de campo estándar o normalizado. Para ello, un primer paso importante esclasificar los buses de campo en propietarios y abiertos.

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 9/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 7
Buses de CampoPropietarios
Reciben este nombre por ser propiedad intelectual de unacompañía particular, por lo cual no se puede hacer mucho conellos a no ser que se adquiera una licencia, las cuales soncontroladas a discreción del propietario, sometidas arestricciones de uso y a elevados costos.
C L A S I F I C A C I Ó N
Buses de Campo Abiertos
Se caracterizan por seguir criterios opuestos a los anteriores: Sus especificaciones completas deben estar publicadas y
disponibles a precios razonables para cualquiera quedesee adquirirlas.
Sus componentes críticos deben estar disponibles en lasmismas condiciones.
Los procedimientos de validación y homologación debenestar bien definidos y abiertos a cualquiera.
Esta primera clasificación de los buses de campo ha sido tenida en cuenta por todos aquellosorganismos que han realizado alguna vez el intento de crear un estándar. El más serio de
estos intentos de normalización, ha sido el emprendido por el IEC (Comité ElectrotécnicoInternacional), cuyo comité TC65C-WG6 ha definido unas reglas generales, constituyendoesto un punto de partida importante para acercarse al deseado estándar.
Las condiciones fijadas por el IEC son las siguientes:
1.- Nivel físico Bus serie controlado por un maestro, comunicación semiduplextrabajando en banda base.
2.- Velocidades Dos alternativas: 1 Mbit/s para distancias cortas o valores inferiores,entre 250 Kbits/s a 64 Kbits/s, para distancias largas.
3.- Longitudes Dos alternativas: 40 m para la máxima velocidad y 350 m para
velocidades más bajas.4.- Número de periféricos. Máximo de 30 nodos, con posibles ramificaciones hasta un máximode 60 elementos.
5.- Tipo de cable Pares de cables trenzados y pantalla (STP).6.- Conectores Bornes de tipo industrial o conectores tipo D9 o D25.7.- Conexión/desconexión“on line”
La conexión y/o desconexión de algún nodo o derivación no debeinterferir el tráfico de datos.
8.- Topología Bus físico con posibles derivaciones hacia los nodos o periféricos.9.- Longitud deramificaciones
Máxima longitud de las derivaciones de 10 m.
10.- Aislaciones 500 V c.a. permanentes entre elementos de campo y bus. Tensión deprueba 1500 V c.a./1 min.
11.- Seguridad intrínseca Opción a conectar elementos de campo con tensiones reducidas paraatmósferas explosivas.
12.- Alimentación Opción de alimentar los elementos de campo a través del bus.13.- Longitud de mensajes Mínimo 16 bytes por mensaje.14.- Transmisión demensajes
Posibilidad de dialogo entre cualquier par de nodos sin repetidor. Estono excluye, sin embargo, la alternativa de que la comunicación sehaga a través de un maestro ni tampoco excluye el empleo derepetidores “transparentes” para incrementar las distancias detransmisión.
15.- Maestro flotante Posibilidad de maestro flotante entre diversos nodos.16.- Implementación de protocolo
Los circuitos integrados que implementen el protocolo deben estar disponibles comercialmente y ser de dominio público (no protegidos
por patentes de exclusividad).

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 10/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 8
Estas especificaciones son bastante exigentes para el nivel1 (físico), pero deja muy abiertolos niveles de 2 y 7 (enlace y aplicación), es decir , no se especifica la trama del mensaje nilas funciones disponibles, lo cual puede ser problemático desde el punto de vista del usuario.Esto es algo parecido a lo que ocurre con dos dispositivos que intercambian bits a través desus puertos RS-232 a nivel físico, pero que son incapaces cada uno de interpretar losmensajes del otro.Sin embargo muchos buses comerciales disponibles en la actualidad nacieron antes de lanormativa IEC y, por tanto, no cumplen algunos de los requisitos.
Con estas consideraciones, el comité ISA-SP50 que colabora con el IEC, elaboró la NormaIEC 1158 (Physical Layer Specification) , siendo esta adoptada por los principales fabricantesde equipos, sistemas y demás componentes orientados al control de procesos. Sin embargo,aunque el número de equipos y usuarios de este pretendido estándar ha aumentado en losúltimos años, los resultados obtenidos están muy lejos de lo que se buscaba, pues ningunode los fabricantes de entidad ha evolucionado desde su propio bus de campo hacia elFielbus, y lo que han hecho ha sido rediseñar parte de la línea de productos que ya poseíapara ofertarla con este nuevo bus de campo.
El resultado es que se sigue estando ante un alto grado de incompatibilidad en lo que serefiere a de productos a este nivel.
Buses de Campo en el MercadoExisten en el mercado una amplia variedad de buses de campo entre los cuales podemosdistinguir:
A- Buses de alta velocidad y baja funcionalidad Están diseñados para integrar dispositivos simples como finales de carrera, fotocélulas, relésy actuadores simples, funcionando en aplicaciones de tiempo real, y agrupados en unapequeña zona de la planta, típicamente una máquina. Algunos ejemplos son:
CAN: Diseñado originalmente para su aplicación en vehículos.
SDS: Bus para la integración de sensores y actuadores, basado en CANASI: Bus serie diseñado por Siemens para la integración de sensores y actuadores.
B- Buses de alta velocidad y funcionalidad mediaSe basan en el diseño de una capa de enlace para el envío eficiente de bloques de datos detamaño medio. Estos mensajes permiten que el dispositivo tenga mayor funcionalidad demodo que permite incluir aspectos como la configuración, calibración o programación deldispositivo. Son buses capaces de controlar dispositivos de campo complejos, de formaeficiente y a bajo costo. Algunos incluyen funciones estándar para distintos tipos dedispositivos (perfiles) que facilitan la inter-operbilidad de dispositivos de distintos fabricantes. Algunos ejemplos son: DeviceNet ,LONWorks, BitBus, DIN MessBus ,InterBus-S
C- Buses de altas prestacionesEntre sus características incluyen: Redes multi-maestro con redundancia; Comunicaciónmaestro-esclavo según el esquema pregunta-respuesta ; Recuperación de datos desde elesclavo con un límite máximo de tiempo; Petición de servicios a los esclavos basada eneventos; Altos niveles de seguridad de la red, opcionalmente con procedimientos deautentificación; Conjunto completo de funciones de administración de la red. Algunos ejemplos son: Profibus , WorldFIP , Fieldbus Foundation
D- Buses para áreas de seguridad intrínsecaIncluyen modificaciones en la capa física para cumplir con los requisitos específicos deseguridad intrínseca en ambientes con atmósferas explosivas. La seguridad intrínseca es un
tipo de protección por la que el componente en cuestión no tiene posibilidad de provocar unaexplosión en la atmósfera circundante. Algunos ejemplos son HART, Profibus PA oWorldFIP.

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 11/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 9
Descripción General A continuación se describirán en líneas generales algunos de los buses de campo queactualmente están más difundidos, procurando que no sean exclusivos de una sola marca.Estos son los siguientes: PROFIBUS, WORLDFIP, HART, Y FIELDBUS. Se considera aestos los más representativos, bien por su volumen de implantación, por sus características yusos particulares.
1. PROFIBUS
Profibus se desarrolló bajo un proyecto financiado por el gobierno alemán. Está normalizadoen Alemania por DIN E 19245 y en Europa por EN 50170. El desarrollo y posterior comercialización ha contado con el apoyo de importantes fabricantes como ABB, AEG,Siemens, Klóckner-Moeller,etc. Está controlado por la PNO (Profibus User Organisation) y la
PTO (Profibus Trade Organisation).Profibus se ha difundido ampliamente en Europa y también tiene un mercado importante en América y Asia. El conjunto Profibus DP- Profibus PA cubre la automatización de plantas deproceso discontinuo y proceso continuo cubriendo normas de seguridad intrínseca.
1.1 Perfiles
Este protocolo define tres tipos de perfiles: Profibus DP (Decentralized Periphery). Orientado a sensores/actuadores enlazados
a procesadores (PLCS) o terminales. Profibus PA (Process Automation). Para control de proceso y cumpliendo normas
especiales de seguridad para áreas con riesgo de explosión (IEC 11158-2, seguridad
intrínseca). Profibus FMS (Fieldbus Message Specification). Para tareas universales de
comunicación entre células de proceso o equipos de automatización . La evolución deProfibus hacia la utilización de protocolos TCP/IP para enlace al nivel de proceso haceque este perfil esté perdiendo importancia.
Un sistema típico PROFIBUS-DP consiste en: Un PLC o PC como sistema de control y Varios dispositivos E/S

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 12/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 10
Configuración típica de una red Profibus-PA.
Un sistema típico de PROFIBUS-FMS está compuesto por varios equipos de automatización inteligentes: FMSPC, PLC como sistema de control ,Terminales de operador inteligentes
1.2 Tipos de Transmisión
Utiliza diferentes capas físicas. La más importante, en PROFIBUS DP, está basada en ElARS-485. Profibús PA utiliza la norma IEC 11158-2 (norma de comunicación sincrónica entresensores de campo que utiliza modulación sobre la propia línea de alimentación de losdispositivos y puede utilizar los antiguos cableados de instrumentación 4-20 mA) y para el
nivel de proceso se tiende a la utilización de Ethernet. También se contempla la utilización deenlaces de fibra óptica. Existen puentes para enlace entre diferentes medios, además degateways (puerta de enlace) que permiten el enlace entre perfiles y con otros protocolos.
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 13/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 11
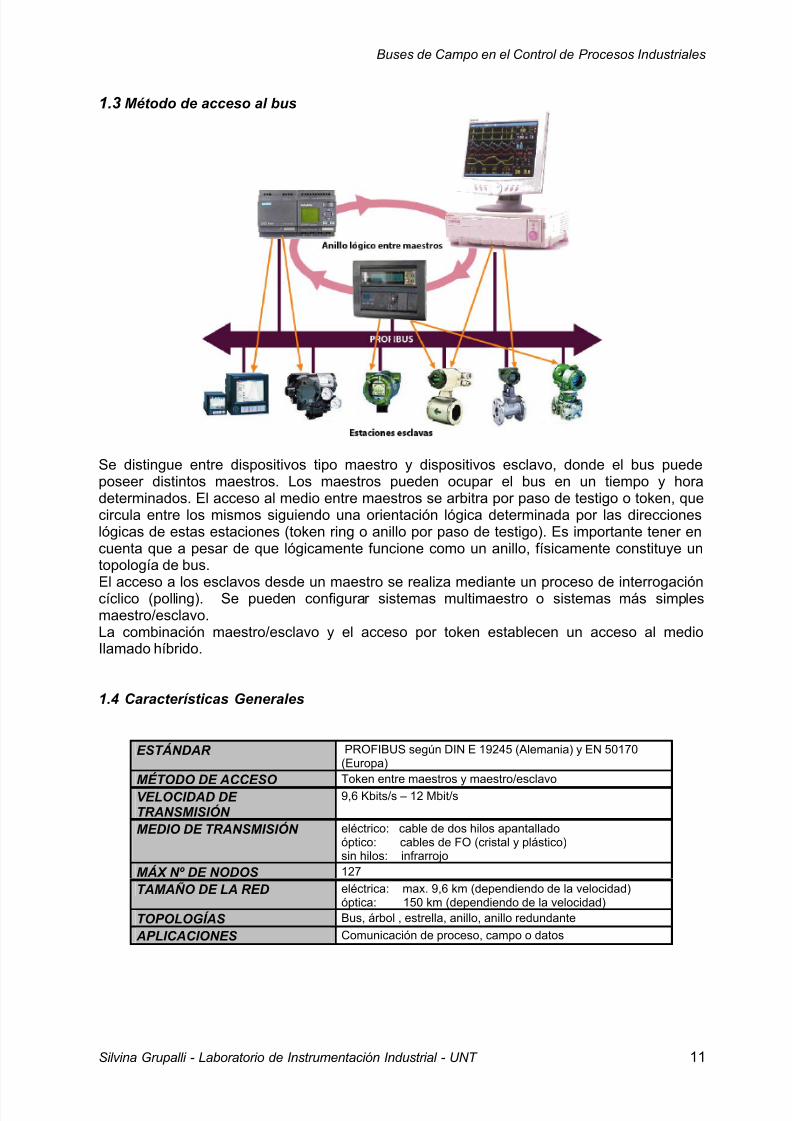
1.3 Método de acceso al bus
Se distingue entre dispositivos tipo maestro y dispositivos esclavo, donde el bus puedeposeer distintos maestros. Los maestros pueden ocupar el bus en un tiempo y horadeterminados. El acceso al medio entre maestros se arbitra por paso de testigo o token, quecircula entre los mismos siguiendo una orientación lógica determinada por las direccioneslógicas de estas estaciones (token ring o anillo por paso de testigo). Es importante tener encuenta que a pesar de que lógicamente funcione como un anillo, físicamente constituye untopología de bus.
El acceso a los esclavos desde un maestro se realiza mediante un proceso de interrogacióncíclico (polling). Se pueden configurar sistemas multimaestro o sistemas más simplesmaestro/esclavo.La combinación maestro/esclavo y el acceso por token establecen un acceso al medioIlamado híbrido.
1.4 Características Generales
ESTÁNDAR PROFIBUS según DIN E 19245 (Alemania) y EN 50170(Europa)
MÉTODO DE ACCESO Token entre maestros y maestro/esclavoVELOCIDAD DE TRANSMISIÓN
9,6 Kbits/s – 12 Mbit/s
MEDIO DE TRANSMISIÓN eléctrico: cable de dos hilos apantalladoóptico: cables de FO (cristal y plástico)sin hilos: infrarrojo
MÁX Nº DE NODOS 127
TAMAÑO DE LA RED eléctrica: max. 9,6 km (dependiendo de la velocidad)óptica: 150 km (dependiendo de la velocidad)
TOPOLOGÍAS Bus, árbol , estrella, anillo, anillo redundante
APLICACIONES Comunicación de proceso, campo o datos

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 14/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 12
2. WorldFIP
Desarrollado en Francia a finales de los ochenta y normalizado por EN 50170, que tambiéncubre Profibus. Sus capas física y de aplicación son análogas a las de Foundation FieldbusH1 y Profibus PA. La división Norteamérica de WorldFIP se unió a mediados de los noventaa la Fieldbus Foundation en el esfuerzo por la normalización de un bus industrial común.WorldFIP es un protocolo diseñado para enlazar dispositivos de bajo nivel (sensores,actuadores) con dispositivos de más alto nivel (PLC’s, controladores industriales, etc) ensistemas de automatización en los que se pretende un control distribuido de los procesos.Utiliza un modelo productor-consumidor con gestión de variables cíclicas, eventos y mensajesgenéricos.
2.1 Modo de Operación
En WorldFIP, una red está formada por estaciones con dos tipos de funcionalidad. Una deellas es la función de arbitraje del bus, que se encarga de gestionar el acceso al medio detransmisión. La otra es la función de productor-consumidor .Cualquier estación WorldFIP puede realizar simultáneamente estas dos funciones; pero en uninstante de tiempo dado, sólo una única estación puede estar realizando la función dearbitraje del bus. La estación que arbitra el bus dispone de una tabla que contiene una listade identificadores que circula a través del bus: es la denominada tabla de arbitraje del bus.
El modo de operación se puedecomprender analizando la siguientesituación:Una dada estación , arbitro el bus,
utiliza la petición de consultaID_DAT para difundir sobre el bus elnombre de un identificador. Estaconsulta se registrasimultáneamente por todos los
niveles de enlace de datos de todas las estaciones conectadas en el bus. Una y sólo una dedichas estaciones se reconoce a sí misma como la productora de dicho identificador (estación5). Por el contrario, una o más del resto de las estaciones, entre ellas la que arbitra el bus,reconoce que son consumidoras de la variable en cuestión.
El productor de la variable(estación5) difunde entonces elvalor del identificador medianteuna respuesta del tipo P_DAT .Este valor se capturasimultáneamente por todas lasestaciones consumidoras delidentificador A (En este caso, lasestaciones 1, 3 y el árbitro).La estación encargada del arbitraje realiza, de nuevo, el mismo procedimiento con elsiguiente identificador de la tabla de rastreo, iniciándose de nuevo el ciclo de comunicaciónya comentado.
Cuando se configura el sistema, se define en el árbitro del bus la lista de variables a difundir ylas periodicidades asociadas con cada una de ellas. A partir de esta información seconfeccionan las tablas de arbitraje. Si esta configuración se valida correctamente y se

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 15/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 13
respetan las restricciones de tiempo para el intercambio de las variables listadas, el árbitrodel bus repite indefinidamente el mecanismo descrito anteriormente.
2.2 Características Generales
3. HART
El protocolo o bus de campo HART (Highway Addressable Remote Transducer) desarrolladopor la firma Rosemount (1986) , nace con la idea de compatibilizar modelos tradicionales enla comunicación de campo (lazo 4-20mA) con modelos más actualizados que permiten llevar a cabo un control distribuido de los procesos industriales.Éste es un protocolo que permite la utilización simultánea e independiente de lacomunicación digital con la analógica convencional, sustituyendo los instrumentos de mediday control convencionales por los inteligentes tipo Hart (denominados por Rosemount, Smart ).De este modo se obtienen importantes beneficios:
Se mantienen las estrategias de control actuales y los lazos de control convencionales(generalmente 4-20mA). Esto último permite mantener el cableado existente.
La información digital adicional transmitida a través de este protocolo: variablesmedidas, rango del instrumento, información del producto, diagnosticos, etc.
Se puede utilizar durante las fases de instalación, calibración, mantenimiento y
operación.

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 16/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 14
3.1 Modo de operación
Tal como se ha dicho anteriormente, el protocolo Hart conserva el estándar 4-20mA comoseñal para el control de procesos, añadiendo simultáneamente la posibilidad de transmitir datos digitales sobre el proceso.La comunicación digital se lleva a cabo sobre el mismo lazo analógico, sin verse alteradaninguna de las señales que conjuntamente “viajan” por el par de hilos Hart. Esto permitemantener la rapidez de comunicación que proporciona la señal analógica en un control deprocesos, a la vez que da acceso al usuario a una extensa variedad de diagnósticos digitalese información de mantenimiento sobre los equipos vinculados al bus (protocolo) Hart.
Señales eléctricas presentes en el bus Hart. Simultaneidad de ambas. La representación no está hecha a escala
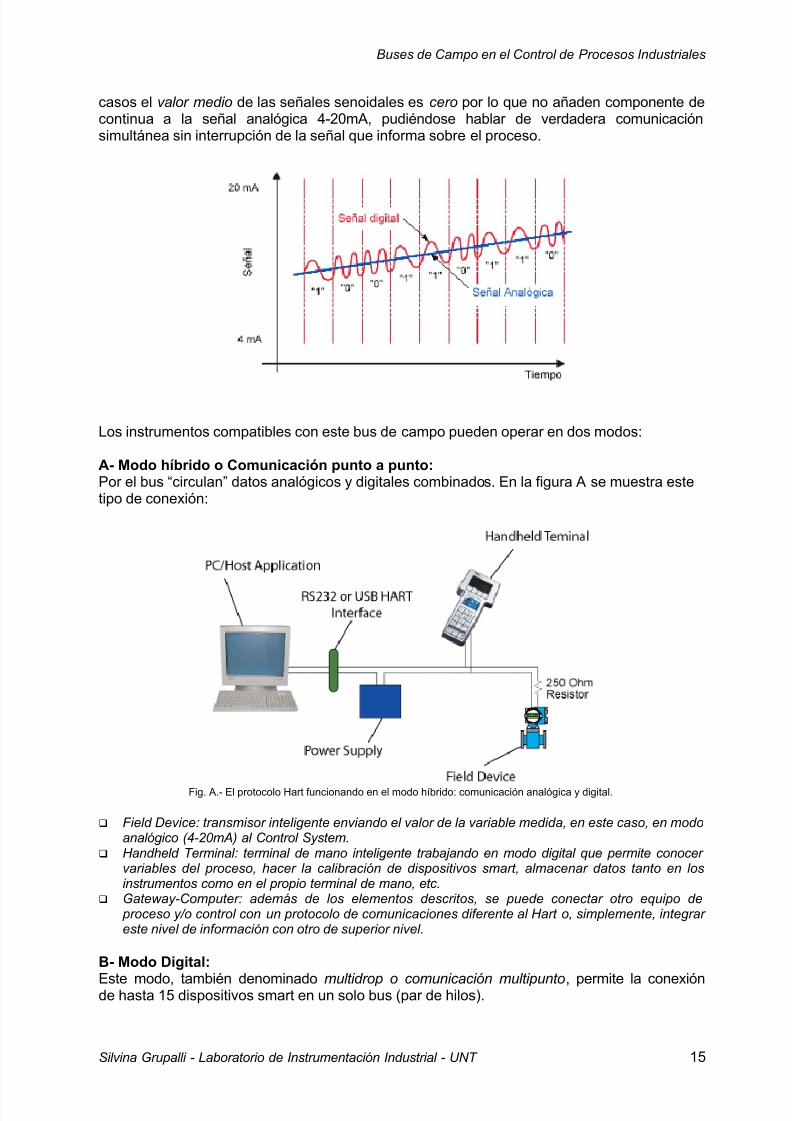
El protocolo Hart utiliza para la comunicación digital la transmisión de “1” y “0” mediante latécnica FSK (Frecuency Shift Keying , codificación por desplazamiento en frecuencia),compatible además con el estándar Bell 202.Tal como puede observarse en la figura 4.29, cuando se desea transmitir un cero lógico, seenvía durante el tiempo prefijado una señal senoidal de valor 2’2 KHz y cuando la transmisión
se corresponde con un uno lógico la frecuencia de la señal senoidal es de 1’2 KHz. En ambos
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 17/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 15
casos el valor medio de las señales senoidales es cero por lo que no añaden componente decontinua a la señal analógica 4-20mA, pudiéndose hablar de verdadera comunicaciónsimultánea sin interrupción de la señal que informa sobre el proceso.
Los instrumentos compatibles con este bus de campo pueden operar en dos modos:
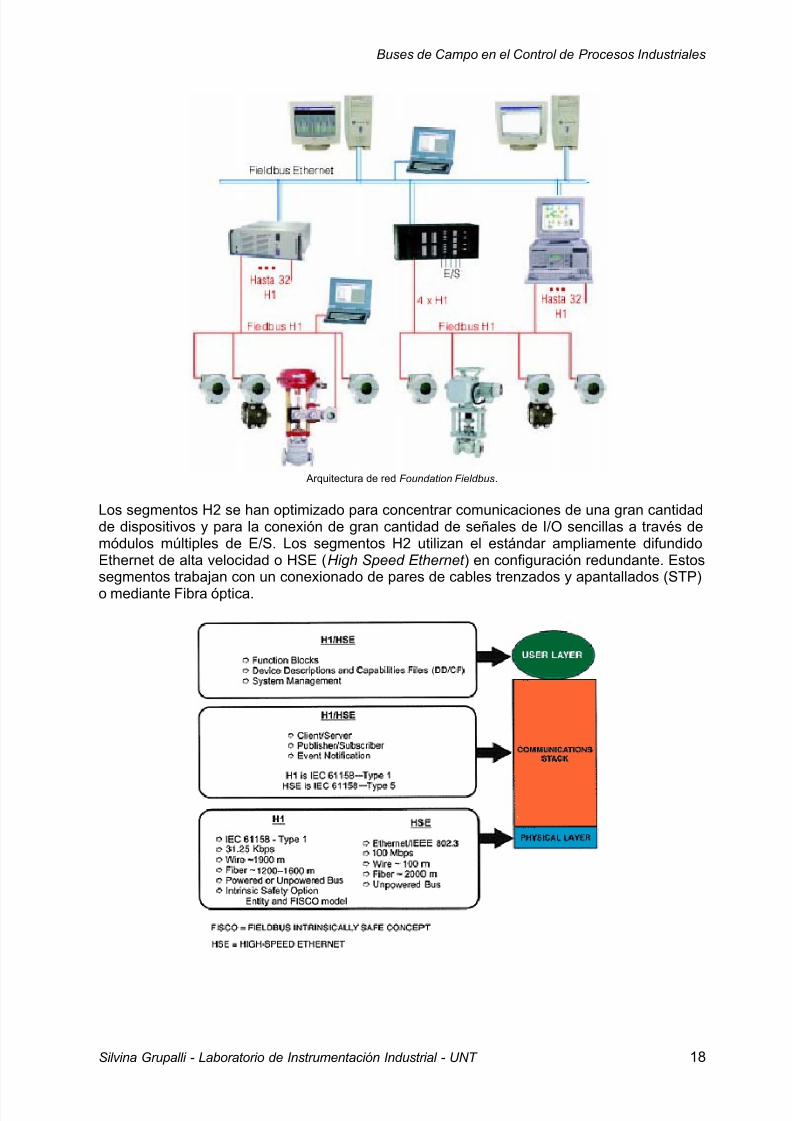
A- Modo híbrido o Comunicación punto a punto:Por el bus “circulan” datos analógicos y digitales combinados. En la figura A se muestra estetipo de conexión:
Fig. A.- El protocolo Hart funcionando en el modo híbrido: comunicación analógica y digital.
Field Device: transmisor inteligente enviando el valor de la variable medida, en este caso, en modoanalógico (4-20mA) al Control System.
Handheld Terminal: terminal de mano inteligente trabajando en modo digital que permite conocer variables del proceso, hacer la calibración de dispositivos smart, almacenar datos tanto en losinstrumentos como en el propio terminal de mano, etc.
Gateway-Computer: además de los elementos descritos, se puede conectar otro equipo de proceso y/o control con un protocolo de comunicaciones diferente al Hart o, simplemente, integrar este nivel de información con otro de superior nivel.
B- Modo Digital:
Este modo, también denominado multidrop o comunicación multipunto, permite la conexiónde hasta 15 dispositivos smart en un solo bus (par de hilos).

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 18/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 16
Este modo de trabajo está especialmente recomendado para aplicaciones de monitorizaciónremota. Puesto que el protocolo Hart usa el sistema de comunicación Bell 202 (estándar paramodem), permite a los dispositivos smart operar sobre líneas. En este caso sólo seríanecesario una fuente de alimentación local, sin más accesorios o elementos de comunicaciónque los modem que permiten el acceso a las líneas telefónicas. Cuando se utiliza una solafuente de alimentación para varios dispositivos smart, el número de éstos queda limitado a15.
Fig. B.- El protocolo Hart permite derivaciones múltiples para varios dispositivos smart en el modo digital
3.2 Características Generales

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 19/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 17
4. FIELDBUS
La organización Fieldbus Foundation esta formada por 120 de los principales fabricantes yusuarios finales de la automatización y control de procesos industriales. Trabajando juntas,estas empresas han definido de forma única una normalización del bus. El protocolo definidopor la organización Fieldbus Foundation supone la evolución tecnológica hacia lacomunicación digital en la instrumentación y en el control de procesos. Se diferencia decualquier otro protocolo en que está diseñado para aplicaciones de control de procesos y nosolo para transmitir datos en modo digital. Este protocolo es abierto, proporcionándole alusuario una gran flexibilidad en la elección del proveedor, sin la perdida de la más mínimafuncionalidad.Implementación de la tecnología Fieldbus Foundation Fieldbus (FF) es un sistema decomunicación totalmente digital, serie, bidirecional, que interconecta los equipos de plantacomo sensores, actuadores y controladores. Fieldbus es una Red de area local (LAN) para
elementos usados en automatización de la producción con la capacidad incorporada dedistribuir el control a través de la red.
4.1. Modo de operación
La Fundación Fieldbus cubre una gama de usos del control de proceso, el control discreto, yhíbrido. Ofrece entre sus posibilidades:
La red de nivel de dispositivo (H1) corre en 31.25 Kbps y usos de control deprocesos de apoyos.
La red de alta velocidad, (HSE), corre en 100 Mbps y diseñada para usos de controlde alto rendimiento, la integración de subsistemas, generadores de datos de altadensidad, y el apoyo de servidores de datos.
Los dispositivos FF se conectan a la red mediante segmentos H1 que presentan lassiguientes características:
- Interconexión de hasta 32 dispositivos utilizando un único par de hilos.- Alimentación de los dispositivos a través del propio segmento.- Utilización de cableado ya existente en planta.- Acceso a zonas Ex, con lo que le permite operar en fábricas y entornos de control deprocesos que incluyen requerimientos de seguridad intrínseca.- Disponer de la aplicación de control en los dispositivos de campo.
Los segmentos H1 se han optimizado para cumplir con los requerimientos anteriores, por ello
trabajan a una velocidad moderada. Los dispositivos también pueden conectarse a través deFibra Optica a los segmentos H1 y se puede convertir cable a FO en cualquier punto delsegmento H1. La única consideración es que la FO no permite alimentación en el propio busdel segmento.Por tanto una red Fieldbus estará compuesta de múltiples segmentos H1 unidos por bridges(puentes) y uno o varios segmentos H2 redundantes tal y como se puede observar en lasiguiente figura :
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 20/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 18
Arquitectura de red Foundation Fieldbus.
Los segmentos H2 se han optimizado para concentrar comunicaciones de una gran cantidadde dispositivos y para la conexión de gran cantidad de señales de I/O sencillas a través demódulos múltiples de E/S. Los segmentos H2 utilizan el estándar ampliamente difundidoEthernet de alta velocidad o HSE (High Speed Ethernet ) en configuración redundante. Estossegmentos trabajan con un conexionado de pares de cables trenzados y apantallados (STP)o mediante Fibra óptica.

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 21/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 19
4.2 Características Generales
Segmento H1 Segmento H2 Velocidad 31.25 Kbit/s 100 Mbits/s
Cableado Igual 4.20 mA o FO STP o FO
Alimentación a través del bus Si, 9-32V No
Estándar (Nivel 1) IEC 1158-2 HSE (High Speed Ethernet)
Dispositivos por segmento 32 Mas de 65000
Seguridad Intrínseca Si No
Otras características de las redes Foundation Fieldbus son:
Seguridad e integridad en las comunicaciones: Los datos se transmiten en elmomento preciso y a intervalos deseados y exactos. La información de control tiene
prioridad a otras comunicaciones en la red. Los dispositivos Fieldbus son inteligentes,tienen iniciativa de comunicación, de manera que cualquiera puede hablar con cualquierasin dependencia de ningún nodo central o "host".
Soporte "Plug&Play" (Conectar y funcionar): Ofrece la facilidad de conectar equipossin necesidad de configuración previa en la red, por lo que no requieren selectores paraconfigurar, por ejemplo, el número de nodo, ni herramientas de configuración externas.Cuando un dispositivo nuevo se conecta a un segmento H1 a través de dos únicoscables, este se identifica a través de un tag único y la gestión de la red se encarga delresto. No es posible que se produzca un error de duplicado de número de nodo.
Soporte de diagnósticos en instrumentos: La tecnología soporta de manera estándar el acceso a datos de diagnósticos y calibración de instrumentos; todo ello se soporta enlas Descripciones de Dispositivo establecidas por los fabricantes.
Interoperabilidad : Fieldbus soporta interoperabilidad total, esto representa unaindependencia de marca y modelo a la hora de sustituir un dispositivo de campo por otro;también permite interoperar entre dos dispositivos de diferentes fabricantes en el mismobus.
Referencias: Control Distribuido - Aut.: J.A. Jiménez, M. Marrón y Manuel Ureña. Universidad de Alcalá AADECA- Cuaderno Profesional Nº 5: Buses de Campo AADECA- Cuaderno Profesional Nº 9: Fieldbus ¿A dónde vamos? Redes locales en entornos industriales, Aut.:Sirgo J.A.,, Universidad de Oviedo Instrumentación Industrial – A. Creus Tutorial sobre FOUNDATION Fieldbus – National Instruments Comparison of FOUNDATION Fieldbus and Traditional Systems – National Instruments www.hartcomm.org www.profibus.com www.fieldbus.org
www.worldfip.org www.smart.com

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 22/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 20
A AN N E E X X O O S S

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 23/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 21
ANEXO A
COMUNICACIÓN SERIAL
Los estándares se han desarrollado para asegurar compatibilidad entre las unidadesproporcionadas por diversos fabricantes, teniendo en cuenta las distancias y tazas detransferencias a las que se transmiten los datos. La asociación de la industria de electrónica(EIA) ha producido los estándares para RS485, RS422, RS232, y RS423 que se ocupan decomunicaciones de datos en forma serial. Las sugerencias se hacen a menudo paraocuparse de los problemas prácticos que se pudieron encontrar en una red típica. Losestándares de EIA utilizaron inicialmente el prefijo “RS -Recommended Standard-” paraindicar recomendaron estándar; sin embargo, ahora se indican generalmente comoestándares de “EIA” para identificar la organización de estándares.
• ¿Qué es la comunicación serial?
Las comunicaciones entre los instrumentos se iniciaron con el puerto serie a través del cualse podía realizar la configuración del mismo, ver diagnósticos, tendencias, etc.El concepto de comunicación serial es sencillo. El puerto serial envía y recibe bytes deinformación de un bit a la vez. Aun y cuando esto es más lento que la comunicación enparalelo, que permite la transmisión de un byte completo por vez, este método decomunicación es más sencillo y puede alcanzar mayores distancias. Por ejemplo, laespecificación IEEE 488 para la comunicación en paralelo determina que el largo del cablepara el equipo no puede ser mayor a 20 metros, con no más de 2 metros entre cualesquierados dispositivos; por el otro lado, utilizando comunicación serial el largo del cable puedellegar a los 1200 metros.Las interfases seriales mas utilizadas son:
• RS-232 RS-232 (Estándar ANSI/EIA-232 , también conocido como Electronic Industries Alliance RS-232), es una interfaz que designa una norma para el intercambio serie de datos binarios entreun DTE (Data Transmition Equipment ,Equipo de transmisión de datos) y un DCE (DataCommunication Equipment , Equipo de comunicación de datos), aunque existen otrassituaciones en las que también se utiliza la interfaz RS-232 (conexión de un DTE con otroDTE , ej. : PC con PC) .Básicamente es una configuración eléctrica no equilibrada para la transmisión de señalesdigitales en una banda simple (modulación NRZ). Dispone de tres conductores :uno detransmisión, otro de recepción y uno de retorno de corriente común para ambos tipos dedatos, que constituye la fuente principal de limitaciones de este tipo de interfase .El cable
actúa como una antena que no solamente irradia señales a los circuitos próximos, sino quetambién es susceptible de recibir señales indeseadas procedentes de fuentes externas ydebe apantallarse en las instalaciones industriales.Los datos se transmiten en lógica negativa (los “1” se traducen como tensión continuanegativa y los “0” como tensión continua positiva). La tensión mas comúnmente utilizada es ± 12 V c.c.La distancia máxima de transmisión entre DTE y DCE es de 15m a una velocidad máxima de20 Kbits/seg.
Ejemplos de Aplicación:

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 24/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 22
Master consultando a un módulo de adquisición de variables analógicas vía puerto RS232
Telecontrol de una válvula de bloqueo, de un oleoducto
• RS-422
El Estándar EIA-422, conocido originalmente como RS-422, es un interfaz o sistema decomunicación serie que consiste en 4 hilos con transmisión full duplex y línea diferencial.Permite conectar más de un dispositivo a la línea de transmisión. La transmisión diferencial,que utiliza dos líneas para transmitir y recibir, tiene la ventaja de ser más inmune al ruido ypuede lograr mayores distancias y una mayor velocidad que RS-232(hasta 10 Mbit/s). Lainmunidad al ruido y la distancia son dos puntos clave para ambientes y aplicacionesindustriales. Puede alcanzar los 1200 m, pero para la velocidad máxima de 10Mbits/seg la
distancia queda limitada a 60m.
• RS-485
RS-485 (Estándar EIA-485) es una mejora sobre RS-422 ya que incrementa el número dedispositivos que se pueden conectar (de 10 a 32) y define las características necesarias paraasegurar los valores adecuados de voltaje cuando se tiene la carga máxima. Gracias a estacapacidad, es posible crear redes de dispositivos conectados a un solo puerto RS-485. Estacapacidad, y la gran inmunidad al ruido, hacen que este tipo de transmisión serial sea laelección de muchas aplicaciones industriales que necesitan dispositivos distribuidos en redconectados a una PC u otro controlador para la colección de datos, HMI (Human MachineInterface), u otras operaciones. RS-485 es un conjunto que cubre RS-422, por lo que todos
los dispositivos que se comunican usando RS-422 pueden ser controlados por RS-485. El
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 25/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 23
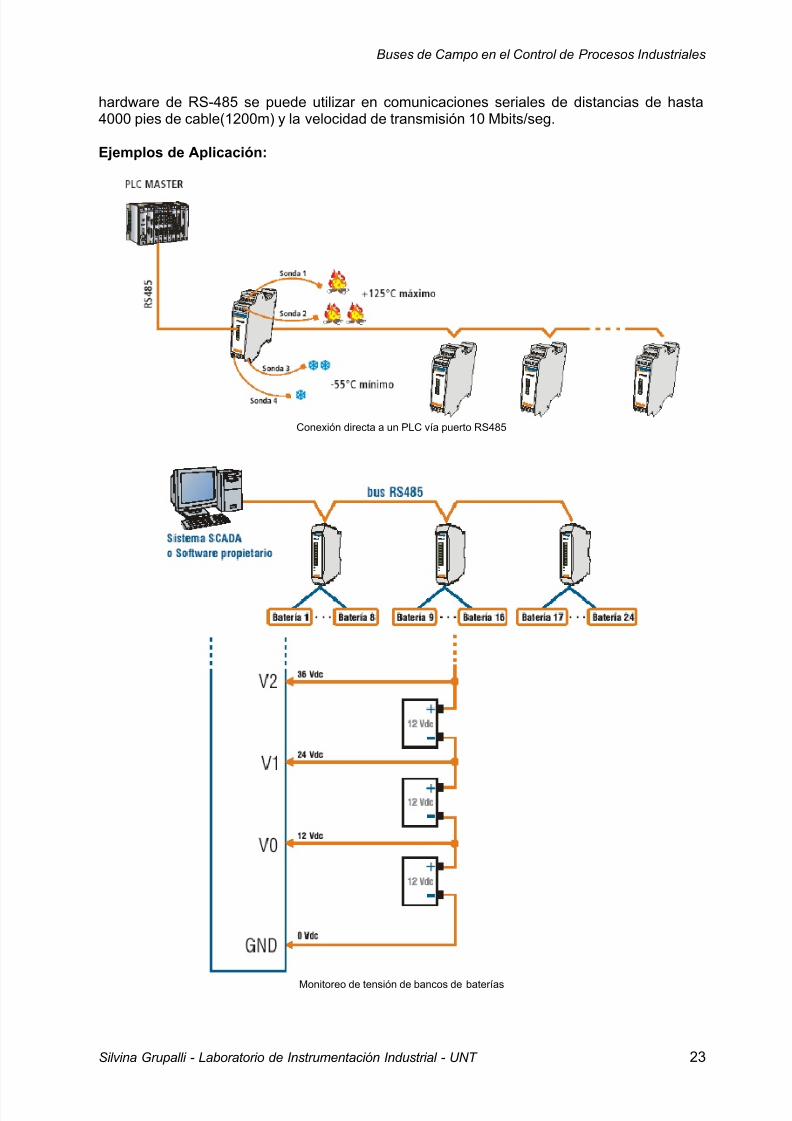
hardware de RS-485 se puede utilizar en comunicaciones seriales de distancias de hasta4000 pies de cable(1200m) y la velocidad de transmisión 10 Mbits/seg.
Ejemplos de Aplicación:
Conexión directa a un PLC vía puerto RS485
Monitoreo de tensión de bancos de baterías
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 26/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 24
ANEXO B
La arquitectura de interconexión del Fieldbus se basa en un subconjunto de tres niveles de laarquitectura proveniente del modelo de referencia OSI (Open Systems Interconnect)desarrollado por ISO (International Organization for Standardization).
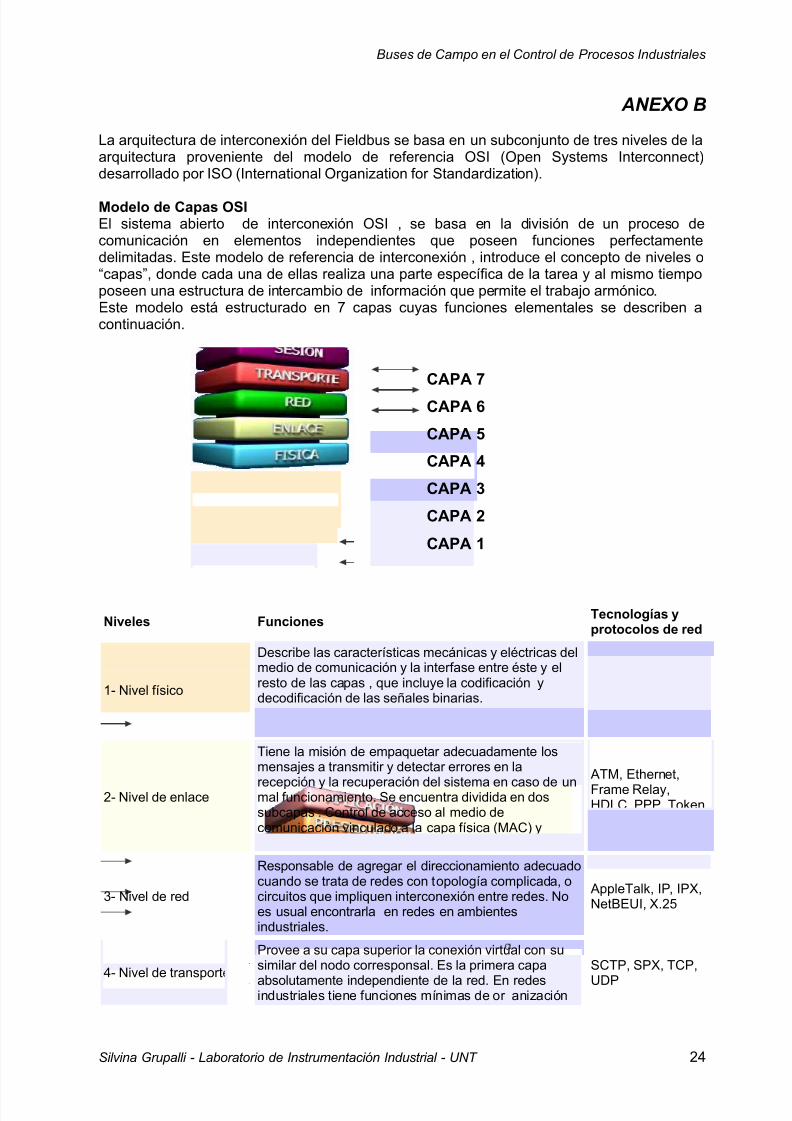
Modelo de Capas OSIEl sistema abierto de interconexión OSI , se basa en la división de un proceso decomunicación en elementos independientes que poseen funciones perfectamentedelimitadas. Este modelo de referencia de interconexión , introduce el concepto de niveles o“capas”, donde cada una de ellas realiza una parte específica de la tarea y al mismo tiempoposeen una estructura de intercambio de información que permite el trabajo armónico.Este modelo está estructurado en 7 capas cuyas funciones elementales se describen acontinuación.
Niveles FuncionesTecnologías yprotocolos de red
1- Nivel físico
Describe las características mecánicas y eléctricas delmedio de comunicación y la interfase entre éste y elresto de las capas , que incluye la codificación ydecodificación de las señales binarias.
Cable coaxial, Cablede fibra óptica,Cable de par trenzado,Microondas, Radio,RS-232
2- Nivel de enlace
Tiene la misión de empaquetar adecuadamente losmensajes a transmitir y detectar errores en la
recepción y la recuperación del sistema en caso de unmal funcionamiento. Se encuentra dividida en dossubcapas : Control de acceso al medio decomunicación vinculado a la capa física (MAC) yControl de enlace lógico (LLC).
ATM, Ethernet,Frame Relay,HDLC, PPP, TokenRing, Wi-Fi, STP
3- Nivel de red
Responsable de agregar el direccionamiento adecuadocuando se trata de redes con topología complicada, ocircuitos que impliquen interconexión entre redes. Noes usual encontrarla en redes en ambientesindustriales.
AppleTalk, IP, IPX,NetBEUI, X.25
4- Nivel de transporte
Provee a su capa superior la conexión virtual con susimilar del nodo corresponsal. Es la primera capa
absolutamente independiente de la red. En redesindustriales tiene funciones mínimas de or anización
SCTP, SPX, TCP,
UDP
CAPA 7
CAPA 6
CAPA 5
CAPA 4
CAPA 3
CAPA 2
CAPA 1

5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 27/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 25
de mensajes, cumpliendo funciones de interfaz.
5- Nivel de sesiónManeja los diálogos entre procesos (programas) en losnodos de origen y destino.
NetBIOS
6- Nivel de presentaciónCumple funciones de interpretación de datos,paginado, organización gráfica, etc.
ASN.1, MIME,SSL/TLS, XML
7- Nivel de aplicación
Es la real interfaz del sistema de comunicaciones conel usuario. El término usuario, en un sistema CIM(Computer Integrated anufacturing), se refiere aprogramas ubicados en otros procesos del nodocorriendo eventualmente en otros procesadores y querequieran el uso del sistema de comunicación.
DNS, FTP, HTTP,IMAP, IRC, NFS,NNTP, NTP, POP3,SMB/CIFS, SMTP,SNMP, SSH, Telnet,SIP
5/14/2018 Buses_de_Campo-CPI - slidepdf.com
http://slidepdf.com/reader/full/busesdecampo-cpi 28/28
Buses de Campo en el Control de Procesos Industriales
Silvina Grupalli - Laboratorio de Instrumentación Industrial - UNT 26
ANEXO C
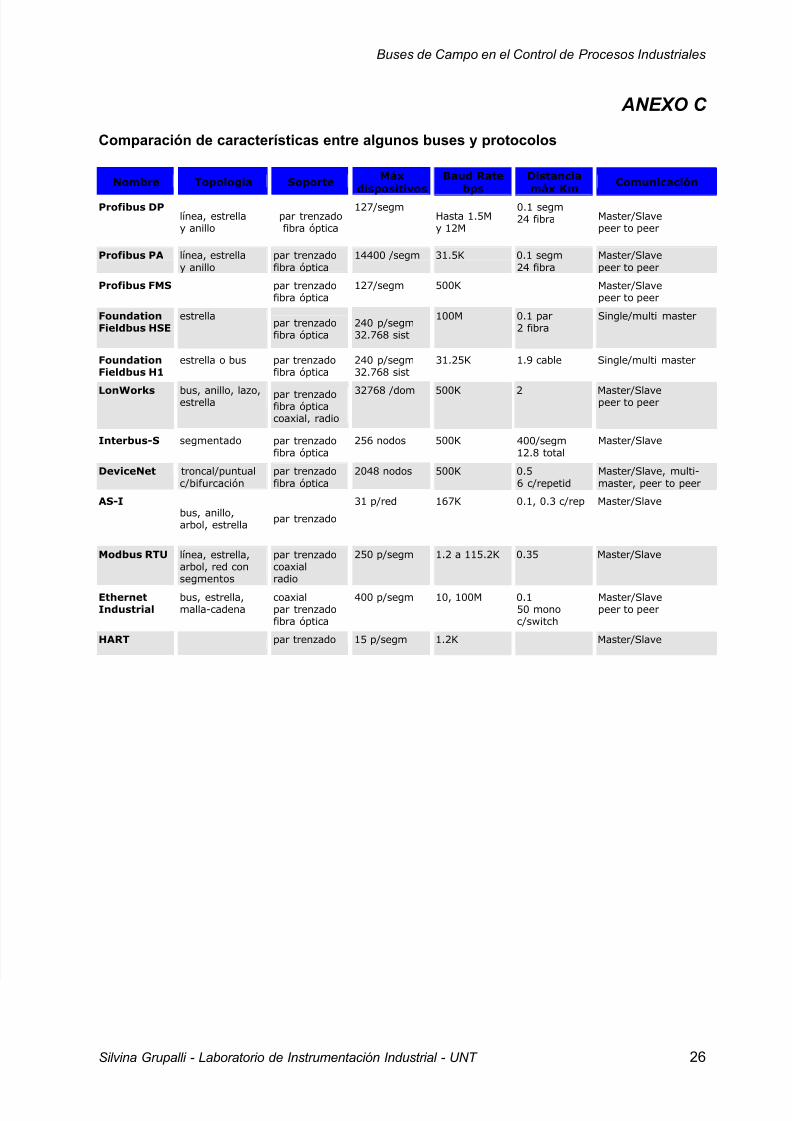
Comparación de características entre algunos buses y protocolos
Nombre Topología Soporte Máx
dispositivos Baud Rate
bps Distanciamáx Km
Comunicación
Profibus DP línea, estrellay anillo
par trenzadofibra óptica
127/segmHasta 1.5My 12M
0.1 segm24 fibra Master/Slave
peer to peer
Profibus PA línea, estrellay anillo
par trenzadofibra óptica
14400 /segm 31.5K 0.1 segm24 fibra
Master/Slavepeer to peer
Profibus FMS par trenzadofibra óptica
127/segm 500K Master/Slavepeer to peer
FoundationFieldbus HSE estrella
par trenzadofibra óptica
240 p/segm32.768 sist
100M 0.1 par2 fibra
Single/multi master
FoundationFieldbus H1
estrella o bus par trenzadofibra óptica
240 p/segm32.768 sist
31.25K 1.9 cable Single/multi master
LonWorks bus, anillo, lazo,estrella
par trenzadofibra ópticacoaxial, radio
32768 /dom 500K 2 Master/Slavepeer to peer
Interbus-S segmentado par trenzadofibra óptica
256 nodos 500K 400/segm12.8 total
Master/Slave
DeviceNet troncal/puntualc/bifurcación
par trenzadofibra óptica
2048 nodos 500K 0.56 c/repetid
Master/Slave, multi-master, peer to peer
AS-I bus, anillo,arbol, estrella
par trenzado
31 p/red 167K 0.1, 0.3 c/rep Master/Slave
Modbus RTU línea, estrella,arbol, red consegmentos
par trenzadocoaxialradio
250 p/segm 1.2 a 115.2K 0.35 Master/Slave
EthernetIndustrial
bus, estrella,malla-cadena
coaxialpar trenzadofibra óptica
400 p/segm 10, 100M 0.150 monoc/switch
Master/Slavepeer to peer
HART par trenzado 15 p/segm 1.2K Master/Slave





























