Embed Size (px)
Citation preview

Capítulo 9
PANDEO DECOLUMNAS
Adaptado de Introducción a la Mecánica de los Sólidos, E. Popov, Ed. Limusa, México D.F. 1981.
9.1. INTRODUCCIÓNAl comienzo de este curso se estableció que la selección de elementos estructurales se basa en
tres características: resistencia, rigidez y estabilidad. Los procedimientos de análisis de esfuerzosy deformaciones se estudiaron en detalle en los capítulos anteriores. En este capítulo se tratarála cuestión de la posible inestabilidad de sistemas estructurales. En tales problemas se debenhallar parámetros críticos adicionales que determinen si es posible una configuración o patrón dedesplazamientos dado para un sistema particular. Este problema es diferente de cualquiera de losvistos antes. Como un ejemplo intuitivo sencillo considérese una barra de diámetro D sometidaa una fuerza axial de compresión. Si tal barra actuando como “columna”, fuera de longitud Dno surgiría ninguna cuestión acerca de la inestabilidad y este miembro corto podría soportar unfuerza considerable. Por otra parte, si una misma barra tuviera una longitud de varios diámetros,al ser sometida a una fuerza axial aún menor que la que puede soportar la pieza corta podría llegara ser lateralmente inestable presentándose en ella pandeo lateral y podría fallar o sufrir colapso.Una regla delgada ordinaria, si se somete a una compresión axial, fallará de esta manera. Laconsideración de la sola resistencia del material no es suficiente para predecir el comportamientodel miembro.
El mismo fenómeno se presenta en numerosas otras situaciones en que existen esfuerzos decompresión. Placas delgadas completamente capaces de resistir cargas en tracción, resultan muyineficaces para transmitir compresión. Vigas angostas sin arriostramiento lateral, pueden doblarselateralmente y romperse por la acción de una carga aplicada. Tanques de almacenamiento, así comosilos metálicos, a menos que estén apropiadamente diseñados, pueden deformarse gravemente porla presión externa (viento) o interna (líquidos o granos) y asumir formas que difieren en formanotable de su configuración geométrica original. Un tubo de pared delgada puede arrugarse oplegarse como un papel de seda cuando se somete a una torsión. Estos son problemas de primordialimportancia en el diseño en ingeniería civil. Además por lo general los fenómenos de pandeo oarrugamiento que se observan en miembros cargados ocurren más bien repentinamente. Por estarazón muchas de las fallas estructurales por pandeo son espectaculares y muy peligrosas.
El enorme número de problemas de inestabilidad o pandeo de estructuras sugerido por la listaanterior está fuera del alcance de este texto1. Aquí sólo se considerará el problema de la columna.Utilizándolo como ejemplo, sin embargo, se ponen de relieve las características esenciales delfenómeno de pandeo y algunos procedimientos básicos para su análisis. Este se llevará a caboinvestigando primero el comportamiento de barras delgadas cargadas axialmente y sometidas
1Ver por ejemplo, D. Bushnell, Computerized buckling analysis of shells, Martinus Nijhoff, Dordretch, Holanda,1985.
1

simultáneamente a flexión. Tales miembros se llaman vigas columnas. Los problemas de vigascolumnas, además de tener un significado propio permiten determinar las magnitudes de cargasaxiales críticas a las que ocurre el pandeo.
A continuación se tratará el pandeo de columnas ideales cargadas concéntricamente. Estoconduce al examen de los valores característicos (o autovalores) de las ecuaciones diferencialesapropiadas. Las autofunciones correspondientes dan las formas de pandeo de tales columnas. Sedescribirá el pandeo elástico y se establecerán límites de validez para el caso de comportamientoelasto-plástico y se presentará también alguna información acerca de columnas cargadas excentri-camente. Finalmente se hará una breve clasificación en base a ejemplos sencillos de problemas enestabilidad elástica a los fines de dar un panorama más completo del tema.
9.2. NATURALEZA DEL PROBLEMA DE LA VIGA CO-LUMNA
El comportamiento de vigas columnas reales se puede entender mejor considerando primer unejemplo idealizado, que se muestra en la Figura .a. Aquí, para simplificar, una barra perfectamenterígida de longitud L se mantiene inicialmente en posición vertical por medio de un resorte en Aque tiene una rigidez a la torsión k. Luego una fuerza vertical P y una horizontal F se aplican enel extremo superior. A diferencia del procedimiento seguido en todos los problemas anteriores, sedeben escribir ahora las ecuaciones de equilibrio para la condición deformada. Teniendo presenteque kθ es el momento resistente que desarrolla el resorte en A se obtiene∑
MA = 0 +, PL senθ + FL cos θ − kθ = 0
o seaP =
kθ − FL cos θ
L senθ(9.1)
El aspecto cualitativo de este resultado se muestra en la Figura 9.1.b y la curva correspondientese ha marcado como la solución exacta. Es interesante observar que cuando θ → π, siempre queel resorte continúe funcionando, el sistema puede soportar una fuerza muy grande P . Para unafuerzas aplicada verticalmente hacia arriba, indicada con un sentido contrario en la figura, elángulo θ disminuirá cuando P aumente. En el análisis de problemas de los capítulos anteriores eltérmino PL senθ no había aparecido en lo absoluto.
La solución expresada por la ecuación (9.1) es para rotaciones arbitrariamente grandes. Enproblemas complejos es muy difícil alcanzar soluciones de tal generalidad. Además en la mayoríade las aplicaciones no se pueden tolerar desplazamientos de gran magnitud. Por consiguiente deordinario es posible limitar el estudio del comportamiento de sistemas al caso de desplazamientospequeños y moderadamente grandes. En este problema lo anterior se puede realizar poniendosenθ ∼= θ y cos θ = 1. De esta forma la ecuación (9.1) se simplifica a
P =kθ − FLL θ
o θ =FL
k − PL(9.2)
Para valores pequeños de θ esta solución es completamente aceptable. En cambio a medida queθ aumenta, la discrepancia entre esta solución linealizada y la solución exacta llega a ser muygrande, Figura 9.1.b.
Para una combinación crítica de los parámetros k, P y L, el denominador (k − PL) en el últimotérmino de la ecuación (9.2) sería cero y presumiblemente daría lugar a una rotación θ infinita.Esto es completamente irreal y resulta de una formulación matemática impropia del problema.No obstante, tal solución proporciona una buena guía acerca del valor de la magnitud de la fuerza
2

0
k/L
soluciónexacta
solución linealizada
P
θπ
L
P
F
A
θ
barrarígida
(a) (b)
Figura 9.1: Respuesta fuerza-desplazamiento de un sistema con un grado de libertad
axial P a la que las deflexiones llegan a ser intolerablemente grandes. La asíntota correspondientea esta solución, obtenida de la igualdad (k − PL) = 0, define la fuerza PC como
PC =k
L(9.3)
Es significativo observar que en sistemas reales las grandes deformaciones asociadas a fuerzasdel mismo orden de magnitud que PC por lo general causan tensiones tan grandes que haceninservible el sistema. Por otra parte, el análisis no lineal de sistemas estructurales debido alcambio de configuración geométrica y al comportamiento inelástico de los materiales es muycomplejo y requiere de herramientas computacionales que no siempre están al alcance del analista.Por consiguiente, en el análisis de pandeo de miembros a compresión desempeña el papel másimportante la determinación de PC con una base simplificada, siguiendo las líneas del métodoutilizado en el ejemplo anterior.
A continuación se emplearán los conceptos anteriores en la resolución de un problema de unaviga-columna elástica.
9.2.1. Ejemplo 1
Una viga columna se somete a fuerzas axiales P , y a una fuerza transversal hacia arriba, F , ensu punto medio, Figura 9.2.a. Determinar la ecuación de la elástica y la fuerza axial crítica PC .Considérese que EI es constante.
El diagrama de cuerpo libre de la viga columna se muestra en la Figura 9.2.b. Este diagramapermite la expresión del momento flector total M , que incluye el efecto de la fuerza axial Pmultiplicada por el desplazamiento v. El momento total dividido por EI puede hacerse igual a laexpresión aproximada habitual de la curvatura para pequeñas rotaciones d2v/dx2. Debido a esto,como en el ejemplo anterior, se obtendrán desplazamientos infinitos en las cargas críticas.
3

L/2 L/2
P P
F Fv
P P x
x
v
M
F/2F/2
(a) (b)
Figura 9.2: .
Por lo tanto, utilizando la relación M = EIv” y observando que en la mitad izquierda de laviga M = −F
2x− Pv, se tiene
EIv” =M = −Pv − F
2x
(0 ≤ x ≤ L
2
)o bien
EIv” + Pv = −F2x
Dividiendo por EI y denominando por
α2 =P
EI(9.4)
después de alguna simplificación, la ecuación diferencial gobernante será
d2v
dx2+ α2v = −α
2F
2Px (9.5)
La solución de la homogénea (F = 0) para esta ecuación diferencial es bien conocida y resultade una suma de funciones armónicas (corresponde por ejemplo a la forma del movimiento armónicosimple), en tanto que la solución particular es igual al término independiente dividido por α2. Enconsecuencia, la solución completa es
v (x) = C1sen (αx) + C2 cos (αx)−F
2Px (9.6)
Las constantes C1 y C2 provienen de las condiciones de borde: desplazamiento transversal nulo enel apoyo v (0) = 0 y la condición de simetría v′ (x = L/2) = 0. La primera condición da
v (0) = C2 = 0
Puesto que v′ (x) = C1α cos (αx)− C2αsen(αx)−F
2Py como ya se ha determinado que C2 es cero, la segunda condición conduce a
v′(L
2
)= C1α cos
(αL
2
)− F
2P= 0
C1 =F
2Pα cos(αL
2
)4

Substituyendo esta constante en la ecuación (9.6)
v (x) =F
2Pα
1
cos(αL
2
)sen (αx)− F
2Px (9.7)
El desplazamiento máximo ocurre en x = L2. Por lo tanto, después de algunas simplificaciones,
vmax =F
2Pα
[tan
(αL
2
)− αL
2
](9.8)
De esto se puede concluir que el momento máximo absoluto que se produce en el punto medio, es
Mmax =
∣∣∣∣−FL4 − Pvmax
∣∣∣∣ = F
2αtan
(αL
2
)(9.9)
Obsérvese que las expresiones dadas por las ecuaciones (9.7), (9.8) y (9.9) se hacen infinitas siαL2
es múltiplo de π2puesto esto hace nulo a cos
(αL2
)e infinito a tan
(αL2
). Expresado algebraica-
mente, esto ocurre cuandoαL
2=
√P
EI
L
2=nπ
2(9.10)
donde n es un entero. Despejando P de esta ecuación, se obtiene la magnitud de esta fuerza quecausa desplazamientos o momentos flectores infinitos. Esto corresponde a la condición de la fuerzaaxial crítica PC para esta barra
PC =n2π2EI
L2(9.11)
Para la fuerza crítica mínima el entero n vale 1. Este resultado fue establecido por primera vezpor el notable matemático Leonhard Euler en 1757 y con frecuencia se la denomina la carga depandeo de Euler. La expresión (9.11) se examinará con mayor detalle en la sección 5.
Es importante observar que la ecuación diferencial (9.5) es de un tipo diferente al que se utilizópara calcular los desplazamientos de vigas con cargas transversales únicamente y por lo tanto nopueden integrarse de la misma forma.
9.3. ECUACIONES DIFERENCIALES PARA VIGAS CO-LUMNAS
Para una más completa comprensión del problema de la viga columna resulta instructivo dedu-cir varias relaciones diferenciales entre las variables involucradas. Con ese objetivo consideremosun elemento diferencial de viga columna como se indica en la Figura 9.3. Notar especialmente queel elemento se muestra en su posición deformada. Para vigas ordinarias (comportamiento lineal)cargadas transversalmente esto no es necesario. Por otro lado los desplazamientos que se tratan eneste análisis son pequeños en relación con la luz de la viga columna, lo cual permite las siguientessimplificaciones
dv/dx = tan θ ∼= θ ∼= senθ, cos θ = 1 y ds ∼= dx
Con esta base, las dos ecuaciones de equilibrio son∑Fy = 0 ↑ +, qdx− T + (T + dT ) = 0
∑MA = 0 +, −M + Pdv + Tdx+ qdx
dx
2+ (M + dM) = 0
5

La primera de estas ecuaciones dadT
dx= −q (9.12)
que no cambia respecto a lo visto en el caso de plantear el equilibrio en la posición indeformada.La segunda, despreciando infinitesimales de orden superior, da
T = −dMdx− P dv
dx(9.13)
Por lo tanto, para vigas columnas, la fuerza cortante T , además de depender de la derivada delmomento M como en la vigas, depende ahora de la magnitud de la fuerza axial y de la pendientede la curva elástica. El último término es la componente de P a lo largo de las secciones inclinadasque se muestran en la Figura 9.3.
+q
ds
dx
y,v
v
dv
dv/dx
P
P
M
T
T+dTM+dM
A
x
Figura 9.3: Elemento de una viga columna
En este desarrollo se puede utilizar la relación usual de la teoría de flexión, v” = M/ (EI).Substituyendo la ecuación (9.13) en la (9.12) y haciendo uso de la relación anterior, se obtienendos ecuaciones diferenciales alternativas para vigas-columnas
d2M
dx2+ α2M = q (9.14)
o biend4v
dx2+ α2 d
2v
dx2=
q
EI(9.15)
donde para simplificar se supuso que EI es constante y, como antes, a2 = P/ (EI). Si P = 0, lasecuaciones (9.14) y (9.15) resultan las mismas ecuaciones vistas para vigas con carga transversal.Para las nuevas ecuaciones, las condiciones de borde son las mismas vistas con anterioridad,excepto que la fuerza de corte se obtiene de la expresión (9.13).
Para referencia futura, la solución homogénea de la ecuación (9.14)-(9.15) y sus derivadas selistan a continuación:
v = C1sen (αx) + C2 cos (αx) + C3x+ C4
v′ = C1α cos (αx)− C2αsen (αx) + C3 (9.16)v′′ = −C1α
2sen (αx)− C2α2 cos (αx)
v′′′ = −C1α3 cos (αx) + C2α
3sen (αx)
Estas relaciones son necesarias en algunos ejemplos para expresar las condiciones de contorno, afin de evaluar las constantes C1, C2, C3 y C4.
6

9.3.1. Ejemplo 2
Una barra delgada de EI constante se somete simultáneamente a momentos de extremo, M0,y a fuerzas axiales P , como se indica en la Figura 9.4.a. Determinar el desplazamiento máximo yel mayor momento flector.
P P
M0 M0
L
v
x
v Deflexión total
Deflexión debida sólo a M 0
(a) (b)
Figura 9.4: viga-columna sometida a compresión y flexión
Dentro del tramo no existe carga transversal alguna. Por consiguiente el término del segundomiembro de la ecuación (9.15) es nulo, y la solución homogénea de esta ecuación dada por la(9.16.a) será la solución completa. Las condiciones en el contorno son:
v (0) = 0 v (L) = 0 M (0) = −M0 M (L) = −M0
Puesto que M (x) = EIv′′, con ayuda de las ecuaciones (9.16.a) y (9.16.c) estas condicionesdan
v (0) = +C2 +C4 = 0v (L) = +C1sen (αL) +C2 cos (αL) +C3L +C4 = 0M (0) = −C2EIα
2 = −M0
M (L) = −C1EIα2sen (αL) −C2EIα
2 cos (αL) = −M0
Resolviendo las cuatro ecuaciones en forma simultánea,
C1 =M0
P
(1− cos (αL)
sen (αL)
), C2 = −C4 =
M0
Py C3 = 0
Por lo tanto la ecuación de la elástica es
v (x) =M0
P
[1− cos (αL)
sen (αL)sen (αx) + cos (αx)− 1
](9.17)
El máximo desplazamiento ocurre para x = L/2. Después de algunas simplificaciones se en-cuentra que es
vmax =M0
P
[sen2
(αL2
)cos(αL2
) + cos
(αL
2
)− 1
]=M0
P
[sec
(αL
2
)− 1
](9.18)
El mayor momento flector ocurre también en x = L/2. Su valor máximo absoluto es
Mmax = |−M0 − Pvmax| =M0 sec
(αL
2
)(9.19)
Es importante observar que en miembros delgados los momentos flectores pueden aumentarsubstancialmente por la presencia de fuerzas axiales de compresión. Cuando existen tales fuerzas,aumentan los desplazamientos causados por la carga transversal, Figura 9.4.b. En el caso de fuerzasde tracción los desplazamientos disminuyen.
7

9.4. ESTABILIDAD DEL EQUILIBRIOUna aguja perfectamente recta sostenida sobre su punta puede considerarse en equilibrio. Sin
embargo, la menor perturbación de éste o la imperfección más pequeña en su fabricación haríanimposible tal estado. Se dice que esta clase de equilibrio es inestable, y es imperativo evitarsituaciones análogas en sistemas estructurales.
Para aclarar más el problema, consideremos de nuevo una barra vertical rígida con un resortede torsión, de rigidez k, en su base, como se muestra en la Figura .a. El comportamiento de talbarra sometida a una fuerza vertical P y una fuerza horizontal F se consideró en la sección .La respuesta de este sistema a medida que aumenta la fuerza P se indica en la Figura .b parauna fuerza F grande y una fuerza F pequeña. Surge entonces la siguiente pregunta:¿Cómo secomportará este sistema si F = 0 ? Este es el caso límite y corresponde al estudio del pandeoperfecto.
L
P
F
A
θ
P
0
θ
F=0
Punto debifurcación
Condición inestablede equlibrio
P
F grande
F pequeñaPc=k/L
(a) (b)
Figura 9.5: Comportamiento de pandeo de una barra rígida
La barra rígida de la Figura 9.5.a puede experimentar sólo rotación, ya que no se puedeflexionar; es decir, el sistema tiene un grado de libertad. Para una rotación supuesta, θ, el momentoen el resorte (restaurador) es kθ, y con F = 0, el momento que produce P (perturbador) seráPLsenθ ≈ PLθ, por lo tanto, si
kθ > PLθ, el sistema es estable
y sikθ < PLθ, el sistema es inestable.
Exactamente en el punto de transición kθ = PLθ, el equilibrio no es estable ni inestable sinoneutro (o indiferente). La fuerza asociada a esta condición es la carga pandeo o crítica, que sedesignará por PC . Para el sistema considerado
PC =k
L(9.20)
8

Esta condición establece el comienzo del pandeo. Con esta fuerza dos posiciones de equilibrioson posibles, la forma vertical y una forma inclinada infinitesimalmente próxima a ella. Por lotanto, como es posible seguir dos ramas o caminos en la solución, a esta condición se la llamapunto de bifurcación de la solución de equilibrio. Para P > k/L el sistema es inestable. Comola solución ha sido linealizada no hay posibilidad de que θ sea arbitrariamente grande en PC .Considerando grandes desplazamientos, hay siempre un punto de equilibrio estable en θ < π.
El comportamiento de columnas elásticas, cargadas concéntricamente y perfectamente rectas,es decir columnas ideales, es análogo al comportamiento descripto en el sencillo ejemplo anterior.A partir de una formulación linealizada del problema se puede determinar las cargas críticas depandeo. Algunos ejemplos se darán en las siguientes secciones.
Las cargas críticas no describen la acción del pandeo mismo. Utilizando una ecuación diferen-cial exacta de la curva elástica para deflexiones grandes, es posible hallar posiciones de equilibriomás altas que PC , correspondiente a la fuerza aplicada P . Los resultados de tal análisis se ilustranen la Figura 9.6. Notar especialmente que aumentando P en sólo 1,5%PC sobre PC se produceun desplazamiento lateral máximo del 22% de la longitud de la columna2. Por razones prácticas,desplazamientos tan grandes rara vez pueden ser aceptados. Además, por lo general el materialno puede resistir los esfuerzos de flexión inducidos. Por lo tanto, las columnas reales fallan inelás-ticamente. En la gran mayoría de las aplicaciones de ingeniería PC representa la capacidad últimade una columna recta cargada axialmente en forma concéntrica.
Punto debifurcación
Soluciónlinealizada
Solución exacta
0.22L
Falla del materialinelástico
1.015PC
PC
0
vmax
L
Pvmax
(a) (b)
Figura 9.6: Comportamiento de una barra idealmente elástica
2El hecho de que una columna elástica continúe soportando una carga más allá de la carga de pandeo se puedeobservar aplicando una carga superior a la carga de pandeo, sobre una barra o placa flexible, como por ejemplouna hoja de sierra.
9

9.5. CARGA DE PANDEO DE EULER PARA COLUM-NAS CON EXTREMOS ARTICULADOS
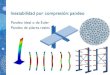
A fin de formular las ecuaciones diferenciales que permitan determinar la carga de pandeo deuna columna ideal, se debe permitir que ocurra un pequeño desplazamiento lateral del eje de lacolumna. Para la columna con extremos articulados e inicialmente recta de la Figura 9.7.a, loanterior se indica en la Figura 9.7.b.
Para el caso de la columna ligeramente flexionada de la Figura 9.7.b., el momento flector Men una sección cualquiera es −Pv (x), que si se substituye en la ecuación diferencial de la elásticada por resultado
d2v
dx2=M
EI=−PEI
v
Entonces, como se hiciera en la ecuación (9.4), tomando α2 = P/EI, tenemos
d2v
dx2+ α2v = 0 (9.21)
L
P
x
P
y,v
PC 4PC9PC
M=-Pv n=1 n=2 n=3
P
(a) (b) (c) (d) (e)
Figura 9.7: Columna con extremos articulados y sus tres primeros modos de pandeo.
Es fácil ver que esta ecuación es la parte homogénea de la (9.5) para una viga columna conextremos articulados. Su solución es
v = C1sen (αx) + C2 cos (αx) (9.22)
donde las constantes arbitrarias C1 y C2 se deben determinar a partir de las condiciones decontorno, que son
v (0) = 0 y v (L) = 0
En consecuenciav (0) = 0 = C1sen (0) + C2 cos (0)
10

es decir C2 = 0, yv (L) = 0 = C1sen (αL) (9.23)
La ecuación (9.23) se puede satisfacer tomando C1 = 0. Como esto corresponde a la condiciónsin pandeo, esta solución es trivial. Alternativamente la ecuación (9.23) también se satisface si
αL =
√P
EIL = nπ (9.24)
donde n es un entero. En esta ecuación los valores característicos o autovalores para tal ecuacióndiferencial, que hacen posible una forma de pandeo, requieren que:
Pn =n2π2EI
L2(9.25)
Se supondrá en este caso que n puede ser cualquier número entero. Sin embargo, puesto que elinterés se centra en el valor mínimo con que puede ocurrir el pandeo, n se debe tomar igual a launidad. Por lo tanto, la carga crítica (o carga de pandeo de Euler) para una columna articuladaen ambos extremos es
PC =π2EI
L2(9.26)
donde I debe ser el momento de inercia mínimo del área transversal de la columna y L la longitudde la misma. Este caso de una columna articulada en ambos extremos con frecuencia se lo denominael caso fundamental.
Substituyendo la ecuación (9.24) en la (9.22), sabiendo que C2 es cero, se obtiene el modo oforma de pandeo de la columna:
v = C1sen(nπxL
)(9.27)
Esta es la función característica o autofunción de este problema y puesto que n puede tomarcualquier valor entero, hay un número infinito de tales funciones. En esta solución linealizadala amplitud C1 del modo de pandeo permanece indeterminada. Para n = 1, la curva elástica esmedia onda de una sinusoide. Esta forma, junto con los modos correspondientes a n = 2 y n = 3,se muestran en la Figura 9.7.c-e. Los modos de orden superior no tienen significado físico en elproblema de pandeo, puesto que la carga crítica mínima ocurre en n = 1.
Una solución alternativa del problema anterior se puede obtener utilizando la ecuación dife-rencial igualada a cero. De la ecuación tal ecuación es
d4v
dx4+ α2 d
2v
dx2= 0 (9.28)
Para el caso considerado (articulado en ambos extremos), las condiciones de borde son:
v (0) = 0, v (L) = 0, M (0) = EIv′′ (0) = 0 y M (L) = EIv′′ (L) = 0
Utilizando estas condiciones con la solución homogénea de la ecuación (), junto con su derivadasegunda dadas por las ecuaciones (.a y c), se obtiene
+C2 +C4 = 0+C1sen (αL) +C2 cos (αL) +C3L +C4 = 0
−C2α2EI = 0
−C1EIα2sen (αL) −C2EIα
2 cos (αL) = 0
Para este sistema de ecuaciones C1, C2, C3 y C4 podrían ser todos iguales a cero, lo cual daríauna solución trivial. Alternativamente, para obtener una solución no trivial se debe anular el
11

determinante de la matriz de coeficientes del sistema de ecuaciones homogéneas. Por lo tanto conα2EI = P ∣∣∣∣∣∣∣∣
0 1 0 1sen (αL) cos (αL) L 1
0 −P 0 0−P sen (αL) −P cos (αL) 0 0
∣∣∣∣∣∣∣∣ = 0
La evaluación de este determinante conduce a sen(αL) = 0, que es precisamente la condición dadapor la ecuación (9.23).
Este método es ventajoso en problemas con diferentes condiciones de contorno en que la fuerzaaxial y el producto EI permanecen constantes en toda la longitud de la columna. El método nose puede aplicar si la fuerza axial se extiende sólo sobre una parte de un miembro.
9.6. PANDEO ELÁSTICO DE COLUMNAS CON DIFE-RENTES RESTRICCIONES EN SUS EXTREMOS
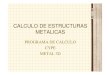
Procedimientos iguales a los estudiados en la sección anterior se pueden utilizar para determinarlas cargas de pandeo elástico de columnas con diferentes condiciones de borde. Las soluciones detales problemas son muy sensibles a las restricciones de extremo. Por ejemplo la carga críticade pandeo para una columna empotrada en su base3, Figura 9.8.b, con una carga vertical en suextremo libre superior, es
PC =π2EI
(2L)2 (9.29)
En este caso extremo la carga crítica es sólo 1/4 de la correspondiente al caso fundamental,ecuación (9.26).
Para una columna empotrada en un extremo y articulada en el otro, Figura 9.8.c:
PC = 2,05π2EI
L2(9.30)
En tanto que para una columna empotrada en ambos extremos, Figura 9.8.d:
PC = 4π2EI
L2(9.31)
Las dos últimas ecuaciones indican que mediante la restricción en los extremos las cargas de pandeocríticas van aumentando notablemente por encima del caso fundamental.
Todas las fórmulas anteriores pueden asemejarse al caso fundamental siempre que en vez dela longitud real de la columna se utilice la longitud efectiva de la misma. Esta longitud resultaser la distancia entre los puntos de inflexión de las curvas elásticas o las articulaciones, si las hay.La longitud efectiva de una columna, Le, en el caso fundamental es igual a L, pero en los casosanteriores es 2L, 0,7L y 0,5L, respectivamente. Para el caso general, Le = KL, donde K es elfactor de longitud efectiva, el cual depende de las restricciones en los extremos.
En contraste con los casos clásicos que se muestran en la Figura 9.8, los miembros a compresiónreales rara vez están verdaderamente articulados o completamente empotrados (fijos contra larotación) en los extremos. Debido a la incertidumbre respecto al grado de fijación de los extremos,a menudo las columnas se suponen con articulaciones en dichas partes. Con excepción del casoque se muestra en la Figura 9.8.b, donde no se puede utilizar, este procedimiento es conservador.
Las ecuaciones anteriores llegan a ser completamente erróneas para el intervalo inelástico y nose deben utilizar en la forma dada (vease la sección 9.8). En Apéndice al final se muestra comoobtener las cargas críticas de estos tres casos.
3Un poste de línea eléctrica sin refuerzos externos y con un pesado transformador soportado sobre su partesuperior es un ejemplo.
12

L=Le
Le=2L
L
Le=0.7L
0.3L
Le=L/2
L/4
L/4
P P P P
P
(a) (b) (c) (d)
Figura 9.8: Longitud efectiva de columnas con diferentes restricciones
9.7. LIMITACIÓN DE LAS FORMULAS DE PANDEO ELÁS-TICO
En las deducciones anteriores de las fórmulas de pandeo para columnas se supuso tácitamenteque el material se comportaba de manera linealmente elástica. Para poner de manifiesto estasignificativa limitación, la ecuación (9.26) puede escribirse en forma diferente. Por definición,I = Ar2, donde A es el área de la sección transversal y r es su radio de giro. La substitución deesta relación en la ecuación (9.26) da:
PC =π2EI
L2=π2EAr2
L2
o bien
σC =PCA
=π2E
(L/r)2 (9.32)
donde la tensión crítica, σC , para una columna se define como un promedio en el área transversalA de la misma, debido a la carga crítica PC . La longitud4 de la columna es L y r el radio degiro mínimo del área de la sección, puesto que la fórmula original de Euler se da en términos delvalor mínimo de I. La relación L
rde la longitud de la columna al radio de giro mínimo de un área
transversal se llama relación de esbeltez (λ) de la columna.De la ecuación (9.32) se puede concluir el límite de proporcionalidad del material es el límite
superior de la tensión con la cual la columna pandeará elásticamente. La modificación necesariade la fórmula para incluir la respuesta inelástica del material se estudiará en la siguiente sección.
4La utilización de la longitud efectiva Le hace general a esta expresión.
13

9.7.1. Ejemplo 3
Hallar la longitud mínima, L, de una columna con extremos articulados, que tenga un áreatransversal 5cm por 7,5 cm y para la cual se aplique la fórmula de Euler para columnas elásticas.Supóngase que E = 2× 105 MPa y que el límite de de proporcionalidad es 2,8 ×102 MPa.
El momento de inercia mínimo de la sección transversal es Imın = 7,5 53
12= 78,125 cm4. En
consecuencia
r = rmın =
√Imın
A=
h√12
=
√78,125
7,5 5=
5√12
= 1,44 cm
Luego, utilizando la ecuación (9.32), σC = π2E/ (L/r)2 y despejando de ella la relación L/rcorrespondiente al límite de proporcionalidad,(
L
r
)2
=π2E
σc=π2 2 105
2,8 102= 7050
es decirλ =
L
r= 84 y L = 84 × 1,44 = 121 cm
Por lo tanto si esta columna tuviera 121 cm o más de longitud, se pandearía elásticamente, yaque para tales dimensiones de la columna la tensión crítica en pandeo no excede al límite deproporcionalidad del material.
9.8. FORMULAS GENERALIZADAS DE LA CARGA DEPANDEO DE EULER
Un diagrama típico tensión-deformación a la compresión para una probeta en la que se impideel pandeo se puede representar como en la Figura .a. En el intervalo de tensiones desde O hastaA el material se comporta elásticamente. Si la tensión en una columna en pandeo no excede deeste intervalo la columna pandeará elásticamente. La hipérbola correspondiente a la ecuación (),σC = π2E/ (L/r)2, es aplicable en este caso. Esta porción de la curva se indica como ST enla Figura .b. Es importante reconocer que esta curva no representa el comportamiento de unacolumna sino más bien el de un número infinito de columnas ideales de diferente longitud. Lahipérbola que corresponde a la región situada más allá del intervalo útil se indica en la figura pormedio de una línea punteada.
Una columna con una relación L/r correspondiente al punto S de la Figura 9.9.b será la co-lumna de más corta longitud hecha de material y tamaño dados, que se pandeará elásticamente.Una columna más corta, con una relación L/r aún menor, no se pandeará en el límite de pro-porcionalidad del material. En el diagrama tensión-deformación, Figura 9.9.a, esto significa que elnivel de tensiones en la columna ha pasado del punto A y alcanzado quizá un cierto punto B. Aeste nivel de tensiones más alto se puede decir, en efecto, se ha creado una columna de materialdiferente puesto que la rigidez del mismo ya no está representada por el módulo de elasticidad.En este punto, la rigidez del material está dada por la tangente a la gráfica tensión-deformación,es decir, por el módulo elástico tangente (o instantáneo), Et. La columna permanecerá establesi su nueva rigidez a la flexión EtI en B es suficientemente grande y podrá soportar una cargamayor. A medida que la carga aumenta, el nivel de tensiones se eleva también, en tanto que elmódulo referido a la tangente disminuye. Una columna de “material aún menos rígido” actúa bajouna carga creciente. La substitución del módulo elástico tangente, Et, en vez del módulo elásticoinicial, E, es entonces la única modificación necesaria para obtener las fórmulas de pandeo elásticoaplicables en el intervalo inelástico. En consecuencia, la fórmula generalizada de Euler, o bien la
14

ε
A
BC
Et
E
O
σ
L/r
Hipérbola de Euler
Límite deproporcionalidad
Columnas largasIntermedias
Cortas
T
S
R
σ
(a) (b)
Figura 9.9: (a) Diagrama tensión-deformación de compresión (b)Gráfica de la tensión crítica encolumnas en función de la relación de esbeltez
fórmula del módulo referido a la tangente5 será
σC =π2Et
(L/r)2 (9.33)
Como los esfuerzos correspondientes a los módulos referidos a la tangente se pueden obtenera partir del diagrama tensión-deformación a la compresión, la relación L/r a la cual se pandearáuna columna con estos valores se puede obtener de la ecuación (9.33). Una gráfica que representeesta comportamiento para valores intermedios y bajos de L/r está data en la Figura 9.9.b por lacurva desde S hasta R. Los ensayos en columnas individuales verifican esta gráfica con notableexactitud.
Las columnas que se pandean elásticamente se denominan a veces columnas largas. Las co-lumnas con bajas relaciones L/r no presentan esencialmente fenómenos de pandeo y reciben elnombre de columnas cortas. Con bajos valores de L/r, los materiales dúctiles “se aplastan” ypueden soportar cargas muy grandes.
Si la longitud L de la ecuación (9.33) se considera como la longitud efectiva de una columna,se pueden analizar diferentes condiciones de extremo. De acuerdo con este procedimiento en laFigura 9.10 se grafica para fines de comparación, la tensión crítica σC en función de la relaciónde esbeltez para columnas de extremos empotrados y articulados. Es importante notar que lacapacidad de carga en los dos casos está en la relación 4 a 1sólo para columnas que tengan larelación de esbeltez (L/r)1 o mayor. Para valores de L/r menores se obtienen progresivamentemenos ventajas por la restricción al giro en los extremos. Con bajas relaciones L/r , las gráficas seconfunden. Hay poca diferencia si un “bloque corte”está articulado o empotrado en sus extremos,ya que entonces la resistencia determina su comportamiento y no el pandeo.
5La fórmula con el módulo tangente da la capacidad de carga de una columna definida en el instante en queesta tiende a pandearse. Si la columna se deforma aún más, a las fibras del lado cóncavo (las más comprimidas) lescorresponde el módulo tangente. Sin embargo las fibras del lado convexo disminuyen su deformación y se recuperanelásticamente según el módulo elástico inicial. Esto conduce a la teoría del doble módulo para la capacidad de cargade las columnas. Los resultados finales que se obtienen por esta teoría no difieren mucho de los obtenidos usandoel módulo tangente.
15

L/r
Hipérbolas de Euler
Límite deproporcionalidad
TExtremos articulados
Extremosempotrados
(L/r)1
σ
ε
A
σ Punto de fluencia
(a) (b)
Figura 9.10: Comparación del comportamiento de columnas con diferentes condiciones de extremo
9.9. COLUMNAS CARGADAS EXCENTRICAMENTEEn el estudio anterior del pandeo de columnas se supuso que tales elementos eran idealmente
rectos. Puesto que en realidad todas las columnas tienen imperfecciones, las cargas de pandeoque se obtienen para columnas ideales son las mejores posibles. Tales análisis sólo proporcionanindicios acerca del mejor funcionamiento posible de columnas. Por lo tanto, no es sorprendenteque el funcionamiento de columnas haya sido explorado también con base en algunas imperfeccio-nes determinadas estadísticamente o en posibles desalineamientos de las cargas aplicadas. Comouna ilustración de este enfoque, se considerará una columna cargada excéntricamente que es unproblema importante en si mismo.
9.9.1. Viga articulada articulada
Una columna cargada excéntricamente se indica en la Figura 9.11.a. Esta fuerza es equivalentea una fuerza axial concéntrica P y a momentos de extremo M0 = Pe. Tal viga columna yaha sido analizada en el ejemplo 2, donde se encontró que debido a la flexibilidad del miembro, elmáximo momento flexionanteMmax, es igual aM0 sec
(αL2
), ecuación (9.9). Por lo tanto, la tensión
máxima de compresión, que ocurre a la mitad de la altura en el lado cóncavo de la columna, sepuede calcular como
|σ|max =P
A+Md
I=P
A+Mmaxd
Ar2=P
A
[1 +
ed
r2sec
(αL
2
)]A su vez α =
√PEI
=√
PEAr2
, por lo cual
|σ|max =P
A
[1 +
ed
r2sec
(L
r
√P
4EA
)](9.34)
A esta expresión se la suele denominar la fórmula de la secante para columnas. Para que severifique dicha ecuación, la tensión máxima debe permanecer por debajo del límite de elasticidad.
Obsérvese que en la ecuación (9.34) el radio de giro r puede no ser el mínimo, puesto quesurge del valor de I asociado al eje con respecto al cual se produce la flexión. En algunos casos
16

la condición crítica de pandeo puede existir en la dirección de alguna excentricidad no definida.Obsérvese también que en la ecuación (9.34) la relación entre σmax y P no es lineal; σmax aumentamás rápidamente que P . Por consiguiente, las tensiones máximas causadas por fuerzas axiales nose pueden superponer.
Pe
(b)
e P
P
vmax
(a)
Figura 9.11: Columna cargada excéntricamente
La expresión (9.34) puede re-escribirse en función de la tensión de compresión media (σ0 =PA)
y de la relación entre carga y carga crítica P ∗ = PPC
= PL2e
π2EI= α2L2
e
π2
|σ|max = σ0
[1 +
e
r
d
rsec(π2
√P ∗)]
= σ0
[1 + e
A
Wsec(π2
√P ∗)]
donde se observa claramente que
Cuando P ∗ −→ 1(P −→ PC) entonces el argumento de la secante tiende a π2y la tensión
crece indefinidamente
La tensión crece linealmente con la excentricidad. Dado que la relación dres una propiedad
geométrica adimensional de la sección, la influencia de e depende de su relación con el radiode giro r.
9.9.2. Viga empotrada libre
Para obtener la solución hay que imponer las condiciones de contorno adecuadas en las (9.16).Respecto al caso sin excentricidad (ver Apéndice) hay que cambiar la condición de momento enel borde libre
v (x = 0) = C2 + C4 = 0
v′ (x = 0) = C1α + C3 = 0
M (x = L) = EI[−C1α
2sen (αL)− C2α2 cos (αL)
]= Pe
T (x) = −PC3 = 0
17

Escrito como un sistema de ecuaciones0 1 0 1α 0 1 0
−sen (αL) − cos (αL) 0 00 0 −1 0
C1
C2
C3
C4
=
00e0
La solución de este sistema conduce a los coeficientes:
C1 = C3 = 0
−C2 = C4 =e
cos (αL)
de donde la solución resulta
v (x) =e
cos (αL)[1− cos (αx)]
M(x) =cos (αx)
cos (αL)Mo
El desplazamiento máximo (extremo libre) vale
vmax =
[1
cos (αL)− 1
]e = [sec (αL)− 1] e
El momento flector máximo (empotramiento) vale
Mmax =Mo
cos (αL)=Mo sec (αL)
En ambos casos las expresiones de los valores máximos son idénticas al caso anterior si seutiliza la Longitud equivalente. Así en el primer caso (Le = L) el argumento de la secante siguesiendo αLe
2y en el segundo (Le = 2L) el argumento es αL = α2L
2= αLe
2.
9.9.3. Fórmulas aproximadas
Por otro lado, una expresión simplificada de los valores máximos de desplazamiento y momentoflector, más fácil de recordar y visualizar resulta de recordar que
sec (β) =1
cos (β)' 1
1− β2
2
y que el argumento β2 a utilizar es{para el caso art-art
(αL2
)2= 1
4PL2
EI=(π2
)2P ∗
para el caso emp-lib (αL)2 = 14P (2L)2
EI=(π2
)2P ∗
}==> (β)2 =
(π2
)2
P ∗
Luego el desplazamiento máximo aproximado resulta (la aproximación es buena para PPc< 0,5)
vmax =
(1
1− π2
8P ∗− 1
)e =
(1
1− 1,234P ∗− 1
)e (9.35)
Similarmente el momento flector máximo aproximado resulta
Mmax =M0
1− 1,234 P ∗(9.36)
Expresiones similares a esta se utilizan frecuentemente en los códigos para determinar el mo-mento flector máximo a partir de la relación entre la carga actuante P y valor esperado de la cargacrítica PC .
18

9.10. CLASIFICACIONDE COMPORTAMIENTOS EN ES-TABILIDAD
El sistema estructural de un grado de libertad analizado en la sección y que se reproduce enla Figura 9.12.a tiene un comportamiento similar al de una columna cargada axialmente y resultaútil y adecuado para explicar el comportamiento de columnas aisladas a compresión con diferentescondiciones de apoyo. Sin embargo un sistema compuesto por columnas (y barras) solicitadas acompresión puede tener un comportamiento muy distinto. El comportamiento descripto es sólouno de los posibles en estabilidad elástica, y con el objeto de dar una visión más general delproblema de estabilidad se describiran a continuación otros comportamientos.
9.10.1. Bifurcación simétrica estable
Observamos nuevamente el sistema estructural analizado (debe interpretarse que el sistemaincluye a la carga como parte del sistema, no es sólo la estructura) y consideremos las solucionesexactas (). Definiremos como sistema perfecto a aquel en que la barra es perfectamente vertical yla carga horizontal F = 0. Denominaremos como trayectoria de equilibrio a un conjunto continuode puntos (pares (θ, P ) que satisfacen la(s) ecuación(es) de equilibrio. Para la estructura perfectala ecuación de equilibrio es
PLsenθ = kθ (9.37)
cuyas soluciones son
1. para θ = 0 y todo valor de P
2. para θ 6= 0, P = kL
θsenθ >
kL
θ
PL/
k
-1 0 10
0.5
1
TrayectoriaPrimaria
TrayectoriaSecundaria
BifurcaciónTrayectoriasImperfectas
L
P
F
A
θ
barrarígida
(a) (b)
Figura 9.12: Bifurcación simétrica estable
Haremos las siguientes observaciones y definiciones:
A la trayectoria de equilibrio (1) que pasa por la estructura descargada (P = 0) se la deno-mina trayectoria fundamental o primaria. En el caso de un sistema perfecto para cualquiervalor de P se satisface equilibrio con θ = 0, incluso para valores superiores a la carga críticaP > k/L.
19

A la trayectoria correspondiente a θ 6= 0 se la denomina trayectoria poscrítica o secundaria.Notar que esta trayectoria existe sólo para valores superiores a la carga crítica Pcr = k/L.
Estas trayectorias se cruzan en (θcr = 0, Pcr = k/L), este punto se denomina punto de bi-furcación o punto crítico.
Resulta importante establecer si una trayectoria de equilibrio no sólo es matemáticamente posible,si no físicamente factible. Al respecto puede utilizarse el siguiente criterio dinámico de estabilidadque consiste en colocar una pequeña perturbación (carga o movimiento) y observar el compor-tamiento del sistema. Entonces para ello se coloca una fuerza F (pequeña en relación con P )momentaneamente y luego se la quita;
Si el sistema luego de algunas oscilaciones vuelve a la posición vertical (trayectoria primaria),se dice que el es estable para tales valores de carga . Esto es así para la trayectoria primariacon valores de P menores que la carga crítica P < k/L,
Si el sistema no vuelve a la posición original, si no que pasa a una posición de equilibrio conθ 6= 0, para tales valores de carga se dice que el sistema es inestable. Esto es así sobre latrayectoria primaria para valores de P mayores que la carga crítica P > k/L, pues en volveral estado con θ = 0, pasa a posiciones de equilibrio sobre la trayectoria secundaria.
Para el sistema estructural considerado la trayectoria secundaria es siempre estable, en el sentidode que si se aplica una perturbación momentanea, luego de algunas oscilaciones el sistema vuelvea la misma posición.
Cuando la carga F 6= 0, o la barra no es perfectamente vertical, digamos que forma un ánguloθ0 con la vertical, el sistema se denomina sistema imperfecto, la ecuación de equilibrio es
PL senθ + FL cos θ − k (θ − θ0) = 0
El efecto de la carga F sobre el comportamiento del sistema es similar al de la imperfeccióngeométrica θ0. Para pequeños valores de θ es fácil ver que en la expresión linealizada (9.2) podríareemplazarse FL = kθ0. Se denominan trayectorias imperfectas de equilibrio a las solucionesde esta última ecuación. En la Figura 9.12.b se han graficado las trayectorias perfectas y lasimperfectas para 4 valores de FL (-0.10, -0,01, 0,01 y 0,10). Notar además que
Las trayectorias imperfectas son únicas, es decir no bifurcan.
Al invertir el sentido de la carga F para el mismo valor de P la solución de equilibrio cambiade θ a −θ. Es decir que el sistema tiene un comportamiento simétrico. Lo mismo ocurre sila imperfección inicial fuese −θ0 en vez de θ0.
Un valor creciente de F (dentro de valores razonablemente pequeños frente a P ) o θ0 nomodifica significativamente el comportamiento del sistema. El sistema se dice que no essensible a imperfecciones
El comportamiento de este sistema estructural, se denomina Bifurcación Simétrica Estable.
9.10.2. Bifurcación simétrica inestable
Consideremos ahora el comportamiento del sistema indicado en la Figura 9.13.a. El planteo delequilibrio debe nuevamente hacerse sobre la geometría deformada. Tomando momentos respectoa la articulación de la base
P senθ + F cos θ − ksenθ cos θ = 0
20

P = k cos θ − F
tan θ
cuya solución linealizada es
P = k − F
θ
para el modelo perfecto se reduce a
(P − k cos θ) senθ = 0
las soluciones de esta última ecuación son:
1. Trayectoria primaria θ = 0 para cualquier valor de P ,
2. Trayectoria secundaria P = k cos θ.
En la Figura 9.13.b se muestran estas soluciones y también para tres valores de F > 0. Puedenotarse lo siguiente:
L
P
F
A
θ
barrarígida
k
θ
P/k
0 0.5 1 1.50
0.5
1 TrayectoriaPerfecta
TrayectoriasImperfectas
Máximos
(a) (b)
Figura 9.13: Bifurcación simétrica inestable
La solución linealizada permite predecir el valor de la carga crítica Pcr = k
La trayectoria poscrítica (secundaria) es descendente, el sistema pierde capacidad portante.
Las trayectorias imperfectas tienen un valor máximo Pmax . Es decir que el sistema paravalores mayores de Pmax no puede alcanzar una posición de equilibrio.
Cuanto mayor es F (la imperfección) menor es Pmax. El sistema se dice que es sensible aimperfecciones.
Las partes ascendentes de las trayectorias de equilibrio son estables, es decir que un aumentodel desplazamiento conduce a una configuración con mayor capacidad de resistir dP
dθ> 0
Las partes descendentes de las trayectorias de equilibrio son inestables, es decir que unaumento del desplazamiento conduce a una disminución de la capacidad de resistirdP
dθ< 0
21

El sistema tiene un comportamiento simétrico respecto al signo de la imperfección (sea F oun ángulo inicial θ0)
El sistema estructural indicado tiene un comportamiento denominado Bifurcación Simétrica Ines-table. Este comportamiento es por ejemplo el de cilindros delgados sometidos a compresión axialo de esferas bajo presión externa. La carga crítica linealizada es sólo un límite superior de resis-tencia, el cual no se puede alcanzar debido a las inevitables imperfecciones sea en la geometría oen el sistema de carga. La sensibilidad de la carga máxima del sistema depende de su esbeltez, asípara cilindros muy delgados (digamos de una relación radio/espesor de 400) las cargas máximasno superan el 40% de la carga crítica del cilindro perfecto.
9.10.3. Bifurcación asimétrica
El tercer caso típico de bifurcación se ejemplifica con los sistemas estructurales de la Figura9.14.a. Allí la imperfección en la carga se introduce suponiendo que la carga axial no está centradacon la barra vertical sino a una distancia ε. En la Figura 9.14.b se muestra el comportamientodel sistema cuando la carga está centrada (ε = 0) y para dos valores positivos y negativos de laexcentricidad. En este caso puede notarse lo siguiente
L
P
barrarígida
k
uε
εP
u
P/k
0
0.5
TrayectoriaPerfecta
Maximos
TrayectoriasImperfectas
(a) (b)
Figura 9.14: Bifurcación simétrica inestable
El comportamiento del sistema no es simétrico respecto a la variable de desplazamiento u. Sial llegar al punto de bifurcación el sistema toma valores de u positivo el sistema es inestabley si toma valores negativos es estable.
Similarmente si la imperfección (excentricidad) es positiva el comportamiento (resistencia)del sistema tiene un máximo y luego se torna inestable. Por el contrario si la imperfecciónes negativa el sistema se rigidiza.
22

El sistema es sensible a imperfecciones, una imperfección positiva conduce a una marcadadisminución de la resistencia respecto a la carga crítica.
El sistema descripto presenta una Bifurcación Asimétrica que por definición es inestable aunquepara ciertas imperfecciones pueda tener un comportamiento inicialmente estable. Debe entenderseque los modelos indicados en la Figura 9.14 son muy sencillos y que las estructuras habitualmentetienen un nivel de complejidad tal que la “imperfección” tiene componente en la dirección másperjudicial para el sistema.
9.10.4. Punto límite
Hasta ahora se han presentado los comportamientos de ciertos sistemas estructurales con ele-mentos comprimidos que pueden presentar problemas de estabilidad. La clasificación se ha hechoen base a la estructura “perfecta”que permite determinar la carga crítica y las trayectorias de equi-librio posible. Por otro lado se ha visto que cuando la clasificación de la bifurcación es inestable,la inevitable existencia de imperfecciones conduce a trayectorias de equilibrio, que dependiendodel nivel de imperfección van perdiendo rigidez, tienen un máximo de resistencia y luego colapsan.Este tipo de comportamiento se denomina de Punto Límite y es el modo habitual en que falla unaestructura pues no hay ninguna estructura perfecta. Por otro lado, existen muchas estructurascon elementos comprimidos que no pueden asimilarse a un caso de bifurcación, sino que tienensencillamente un comportamiento de punto límite.
En la Figura 9.15 se muestra un sistema sencillo con dos barras elásticas simétricas. Al aumen-tar la carga el sistema empieza a perder rigidez (la pendiente de la curva disminuye) hasta que seanula (punto A) y el sistema pasa dinámicamente a una posición de equilibrio muy diferente B (siexiste). Si el sistema está controlado por desplazamientos y no por la carga, es decir que se muevecontroladamente el punto de aplicación de la carga y se va midiendo su reacción, puede trazarse lalínea punteada (zona inestable). A lo largo de esta parte inestable se pasa por una configuraciónen que ambas barras están horizontales α = 0, donde la carga cambia de signo (pasa por 0) yfinalmente llega a un punto límite en el otro sentido donde el sistema vuelve a ser estable.
α
P
A Bα
P
(a) (b)
Figura 9.15: Punto límite
9.11. APENDICE
En este apéndice se muestra como obtener las cargas críticas de columnas cargadas axialmentecon diferentes condiciones de extremo (ver Figura 9.8 ). Para ello se utiliza la solución general(9.16) de la ecuación diferencial homogénea (9.15)
23

Por otro lado recordar que al no haber cargas aplicadas en el interior de la viga, de (9.12) debecumplirse que T =cte. y que (9.13) puede re-escribirse, usando la solución general (9.16) como:
T = −dMdx− P dv
dx= −
[EI
d3v
dx3+ P
dv
dx
]= −PC3 (9.38)
9.11.1. Viga empotrada-libre
En este caso la expresión (9.38) conduce a T = 0 pues no hay carga horizontal aplicada en elextremo superior por lo cual la reacción de apoyo horizontal también debe ser cero.
A fin de evaluar las constantes C1, C2, C3 y C4.las condiciones de contorno son
v (x = 0) = C2 + C4 = 0
v′ (x = 0) = C1α + C3 = 0
M (x = L) = EI[−C1α
2sen (αL)− C2α2 cos (αL)
]= 0
T (x) = −PC3 = 0
Escrito como un sistema de ecuaciones0 1 0 1α 0 1 0
−P sen (αL) −P cos (αL) 0 00 0 −P 0
C1
C2
C3
C4
=
0000
Para que exista una solución no trivial, es necesario que el determinante de la matriz se anule
det = −αP 2 cos (αL) = 0
De dondeαL =
π
2===>
PcEI
L2 =π2
22===> Pc =
π2EI
(2L)2
Reemplazando αL = π2el sistema de ecuaciones resulta
0 1 0 1π
2L0 1 0
−P 0 0 00 0 −P 0
C1
C2
C3
C4
=
0000
La solución no trivial tiene la forma
C2 = −C4 = −1 y C1 = C3 = 0
de donde la soluciónresultav (x) =
[1− cos
(πx2L
)]9.11.2. Viga empotrada-articulada
El planteo de las condiciones de contorno conduce a
v (x = 0) = C2 + C4 = 0
v′ (x = 0) = C1α + C3 = 0
v (x = L) = C1sen (αL) + C2 cos (αL) + C3L+ C4 = 0
M (x = L) = EI[−C1α
2sen (αL)− C2α2 cos (αL)
]= 0
24

Escrito como un sistema de ecuaciones0 1 0 1α 0 1 0
sen (αL) cos (αL) L 1−P sen (αL) −P cos (αL) 0 0
C1
C2
C3
C4
=
0000
Para que exista una solución no trivial, es necesario que el determinante de la matriz se anule
det = P [−αL cos (αL) + sen (αL)] = 0
Buscando una solución numérica para que se anule el corchete, se llega a:
αL = 4,49341 ===> Pc = 2,0458π2EI
L2
Llevando este valor de αL al sistema resulta (multiplicando la 2da por L y dividiendo la 4tapor P )
0 1 0 14,49341 0 L 0−0,97612 −0,21723 L 10,97612 0,21723 0 0
C1
C2
C3
C4
=
0000
Una posible solución es
C1 =1− cos (αL)
αL− sin (αL)= 0,222548
C2 = −1
C3 = −1 + αL
αL− sin (αL)L−1 = −1,00437 L−1
C4 = 1
de donde la solución tiene la forma
v (x) = 0,222548 sen(4,49341
x
L
)− cos
(4,49341
x
L
)− 1,00437
x
L+ 1
9.11.3. Viga empotrada-empotrada
En este caso las condiciones de contorno son
v (x = 0) = C2 + C4 = 0
v′ (x = 0) = C1α + C3 = 0
v (x = L) = C1sen (αL) + C2 cos (αL) + C3L+ C4 = 0
v′ (x = L) = C1α cos (αL)− C2αsen (αL) + C3 = 0
Escrito como un sistema de ecuaciones0 1 0 1α 0 1 0
sen (αL) cos (αL) L 1α cos (αL) −αsen (αL) 1 0
C1
C2
C3
C4
=
0000
Para que exista una solución no trivial, es necesario que el determinante de la matriz se anule
det = α(1− 2 cos (αL)− αLsen (αL) + sen2 (αL) + cos2 (αL)
)25

Esto se logra si hacemos αL = 2π correspondiente a Pc = 4π2EIL2 . Llevando al sistema de
ecuaciones se tiene 0 1 0 12πL
0 1 00 1 L 12πL
0 1 0
C1
C2
C3
C4
=
0000
una solución no trivial posible es C2 = −C4 y C1 = C3 = 0, con lo cualqueda
v (x) = 1− cos(2πx
L
)
26