Embed Size (px)
Citation preview
Universidad Politecnica de Madrid
Escuela Tecnica Superior de Ingeniera de Sistemas Informaticos
Proyecto Fin de Master
Master en Ciencias y Tecnologıas de la Computacion
Deteccion de Cambios en
Reservorios Acuıferos basados
en el Indice Espectral de Sequıa
Mayra Guadalupe Martınez Mena
Dra. Elvira Martınez de Icaya - Dra. Estibaliz Martınez Izquierdo
enero, 2017
Agradecimientos
Relato un pequeno fragmento de mi historia, sentada tras un escritorio con un
cargo Administrativo durante 9 anos y con el timbre de telefono sonando a cada
minuto, por un momento me hizo cuestionarme si esto era la cuspide para mi carrera
profesional. Tras divagar por instante llego un correo electronico de admision de la
UPM, que me daba una unica oportunidad y la ultima para explorar nuevos retos
y sin pensarlo tome mis maletas y viaje a Espana.
El master se inicio normalmente, recordando ensenanzas olvidadas y otras veces
aprendiendo nuevos conocimientos, hasta que conocı a la Dra. Elvira Martınez de
Icaya, con su catedra que capto mi atencion ya que mencionaba satelites, captura
de imagenes para tratar de resolver y detectar peligros naturales que amenazan la
vida y los medios de vida; el agua, la energıa, los minerales y otros recursos naturales
de los que dependemos.
Ası empieza el desarrollo de mi tesis de Master, en companıa de la Dra Elvira
Martınez de Icaya pero el camino era un nuevo desafio para ambas, decididas a cami-
nar ante cualquier obstaculo que se presentase en nuestro sendero, aparecio como una
luz para guiarnos, con su conocimiento, sus revisiones tecnicas y su gran paciencia
la Dra. Estibalız Martınez Izquierdo.
Doy gracias haberlas conocido, con sus ensenanzas y consejos, se abierto una
puerta inexplorada por mi, a un mundo que no tiene limites para la busqueda de
nuevas soluciones y obtencion de nuevos conocimientos que lo yo lo definirıa que es
((Investigacion)).
((La raza humana necesita un desafıo intelectual. Debe ser aburrido ser Dios y no tener
nada que descubrir)). Stephen Hawking.
2

Indice general
Agradecimientos 2
Indice de figuras 7
Indice de tablas 10
1. Introduccion 11
1.1. Objetivo de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2. Organizacion de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. Estado del Arte 14
2.1. Teledeteccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.1. Conceptos Generales . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.1.1. Principios de Radiacion . . . . . . . . . . . . . . . . 16
2.1.1.2. Espectros Electromagneticos . . . . . . . . . . . . . . 17
2.1.2. Sensores remotos . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.2.1. Caracterısticas de los Sensores . . . . . . . . . . . . . 19
2.1.3. Tipos de Sensores . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1.3.1. Sensores Pasivos . . . . . . . . . . . . . . . . . . . . 21
2.1.3.2. Sensores Activos . . . . . . . . . . . . . . . . . . . . 21
2.1.4. Resolucion de un Sistema Sensor . . . . . . . . . . . . . . . . 22
2.1.4.1. Resolucion Espectral . . . . . . . . . . . . . . . . . . 22
2.1.4.2. Resolucion Espacial . . . . . . . . . . . . . . . . . . 22
2.1.4.3. Resolucion Radiometrica . . . . . . . . . . . . . . . . 22
2.1.4.4. Resolucion Temporal . . . . . . . . . . . . . . . . . . 23
3
Indice general 4
2.1.5. Landsat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.1.5.1. Landsat 7-ETM+ . . . . . . . . . . . . . . . . . . . . 24
2.1.5.2. Landsat 8 OLI/TIRS . . . . . . . . . . . . . . . . . . 25
2.2. Tratamiento Previo de la Imagenes . . . . . . . . . . . . . . . . . . . 26
2.2.1. Correccion Radiometrica . . . . . . . . . . . . . . . . . . . . . 28
2.2.1.1. Pıxeles o lıneas perdidas . . . . . . . . . . . . . . . . 28
2.2.1.2. Bandeado . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2. Correccion Geometrica . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2.1. Localizacion de los puntos . . . . . . . . . . . . . . . 30
2.2.2.2. Transformacion de coordenadas . . . . . . . . . . . . 30
2.2.2.3. Transformacion de niveles de gris . . . . . . . . . . . 31
2.2.3. Correccion Atmosferica . . . . . . . . . . . . . . . . . . . . . . 31
2.2.3.1. Conversion de los ND a valores de radiancia . . . . . 31
2.2.3.2. Mınimo del Histograma . . . . . . . . . . . . . . . . 32
2.3. Indices Espectrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.1. Indice de Vegetacion de Diferenciacion Normalizada . . . . . . 33
2.3.1.1. Ventajas del NDVI . . . . . . . . . . . . . . . . . . . 34
2.3.2. Indice de Diferencia Normalizado del Agua . . . . . . . . . . . 34
2.3.2.1. Ventajas del NDWI . . . . . . . . . . . . . . . . . . . 35
2.3.3. Indice de Diferenciacion Normalizada de Sequıa . . . . . . . . 36
2.3.3.1. Ventajas del NDDI . . . . . . . . . . . . . . . . . . . 36
2.4. Clasificacion de Imagenes . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4.1. Definicion de Clases . . . . . . . . . . . . . . . . . . . . . . . 38
2.4.2. Clasificacion no supervisada . . . . . . . . . . . . . . . . . . . 38
2.4.2.1. Algoritmo de Clustering . . . . . . . . . . . . . . . . 39
2.4.3. Clasificacion supervisada . . . . . . . . . . . . . . . . . . . . . 40
2.4.4. Tipos de algoritmos de clasificacion supervisada . . . . . . . . 40
2.4.4.1. Clasificacion por mınima distancia . . . . . . . . . . 40
2.4.4.2. Clasificacion por maxima verosimilitud . . . . . . . . 41
2.4.4.3. Arboles de clasificacion . . . . . . . . . . . . . . . . . 41
3. Metodologıa 43
3.1. Primer caso de Estudio . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Indice general 5
3.1.1. Lago Poopo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2. Fuentes de Informacion . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.1. Diferencias entre las imagenes de Landsat 7-ETM+ y Landsat
8 OLI/TIRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.1.1. Landsat Enhanced Thematic Mapper Plus (ETM+) 45
3.2.1.2. Landsat 8 Operational Land Imager (OLI) and Ther-
mal Infrared Sensor (TIRS) . . . . . . . . . . . . . . 46
3.3. Estudio de Precipitaciones . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3.1. Promedio Anual de Temperaturas y Precipitaciones . . . . . . 60
3.4. Pre-procesado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.4.1. Pıxeles perdidos o Datos vacıos (data gaps) . . . . . . . . . . 63
3.4.1.1. Metodologıa . . . . . . . . . . . . . . . . . . . . . . . 65
3.4.1.2. Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . 65
3.5. Procesado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.5.1. Combinacion de Imagenes - Stack Layer . . . . . . . . . . . . 68
3.5.2. Indice de Diferencia Normalizada de Vegetacion NDVI . . . . 71
3.5.3. Indice de Diferencia Normalizada de Agua NDWI . . . . . . . 71
3.5.4. Indice de Diferencia Normalizada de Sequıa NDDI . . . . . . 74
3.6. Resultado Indice de Sequıa NDDI . . . . . . . . . . . . . . . . . . . 75
3.7. Mapas de Sequıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.7.1. Clasificacion Supervisada: Arbol de decision . . . . . . . . . . 78
3.7.2. Analisis de Cambios . . . . . . . . . . . . . . . . . . . . . . . 79
3.8. Segundo Caso de Estudio . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.8.1. Lago Urmıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.9. Fuentes de Informacion . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.10. Estudio de Precipitaciones . . . . . . . . . . . . . . . . . . . . . . . . 82
3.10.1. Descripcion breve del clima en Urmıa . . . . . . . . . . . . . . 82
3.11. Pre-procesado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.12. Procesado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.12.1. Combinacion de Imagenes -Stack Layer . . . . . . . . . . . . . 85
3.12.2. Fusion de imagenes . . . . . . . . . . . . . . . . . . . . . . . . 86
3.12.2.1. Metodo de Componentes Principales (PCA) . . . . . 88
Indice general 6
3.12.3. Indice de Diferencia Normalizada de Vegetacion NDVI . . . . 88
3.12.4. Indice de Diferencia Normalizada de Agua NDWI . . . . . . . 88
3.12.5. Indice de Diferencia Normalizada de Sequıa NDDI . . . . . . . 90
3.13. Resultado Indice de Sequıa NDDI . . . . . . . . . . . . . . . . . . . 90
3.13.1. Clasificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.13.1.1. Clasificacion No Supervisada: K-Means . . . . . . . 92
3.13.1.2. Clasificacion Supervisada: Arbol de decision . . . . . 93
3.13.2. Analisis de Cambios . . . . . . . . . . . . . . . . . . . . . . . 95
4. Conclusiones y Trabajos Futuros 98
Bibliografıa 100
Indice de figuras
2.1. Principales elementos de un sistema de Teledeteccion. . . . . . . . . . 15
2.2. Espectro Electromagnetico [5]. . . . . . . . . . . . . . . . . . . . . . . 17
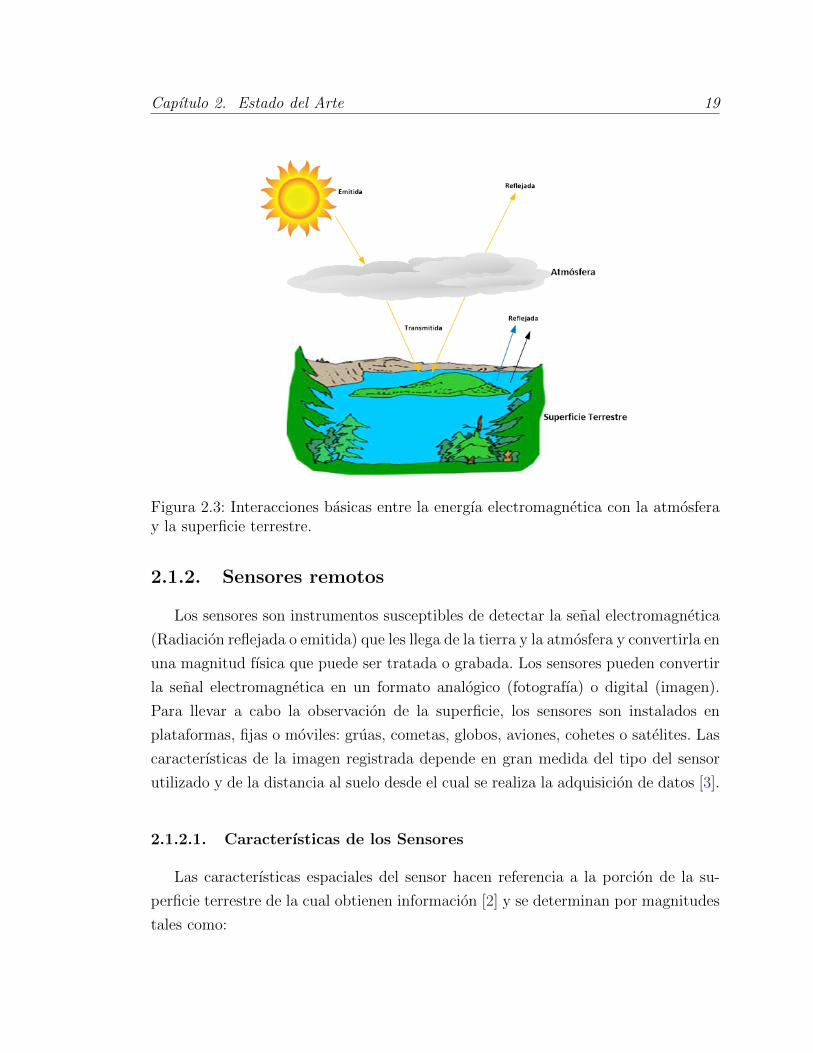
2.3. Interacciones basicas entre la energıa electromagnetica con la atmosfe-
ra y la superficie terrestre. . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4. Tipos de Sensores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5. Niveles de Grises [18]. . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6. Sistema de seguimiento de Lake Mono [18]. . . . . . . . . . . . . . . . 23
2.7. Imagen digital/satelital (forma decimal)[8]. . . . . . . . . . . . . . . . 27
2.8. Division de la imagen en sub-imagenes con los puntos de control de-
tectados por el algoritmo KLT (marcados con +)[10]. . . . . . . . . . 30
2.9. Ejemplo de Indice espectral de vegetacion NDVI [18]. . . . . . . . . . 34
2.10. Ejemplo de Indice espectral de agua NDWI [18]. . . . . . . . . . . . . 35
2.11. Ejemplo del Indice espectral de sequıa NDDI [18]. . . . . . . . . . . . 36
2.12. Clasificacion por Analisis de componentes principales (PCA) [8]. . . . 38
2.13. Definicion no supervisada de clases en el espacio de variables [5]. . . 39
2.14. Tipos de Clasificacion Supervisada [5]. . . . . . . . . . . . . . . . . . 40
2.15. Arbol de Clasificacion [5]. . . . . . . . . . . . . . . . . . . . . . . . . 41
3.1. Lago Poopo, Bolivia anos 2004 (izquierda) y 2016 (derecha) . . . . . 44
3.2. Climograma del ano 2004 . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3. Climograma del ano 2005 . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4. Climograma del ano 2006. . . . . . . . . . . . . . . . . . . . . . . . . 50
3.5. Climograma del ano 2007 . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.6. Climograma del ano 2008 . . . . . . . . . . . . . . . . . . . . . . . . . 52
7
Indice de figuras 8
3.7. Climograma del ano 2009. . . . . . . . . . . . . . . . . . . . . . . . . 53
3.8. Climograma del ano 2010. . . . . . . . . . . . . . . . . . . . . . . . . 54
3.9. Climograma del ano 2011. . . . . . . . . . . . . . . . . . . . . . . . . 55
3.10. Climograma del ano 2012. . . . . . . . . . . . . . . . . . . . . . . . . 56
3.11. Climograma del ano 2013. . . . . . . . . . . . . . . . . . . . . . . . . 57
3.12. Climograma del ano 2014. . . . . . . . . . . . . . . . . . . . . . . . . 58
3.13. Climograma del ano 2015. . . . . . . . . . . . . . . . . . . . . . . . . 59
3.14. Climograma del ano 2016. . . . . . . . . . . . . . . . . . . . . . . . . 60
3.15. Climograma de Temperatura y Precipitaciones del ano 2004-2016 . . 62
3.16. Grafica del total de precipitaciones anuales 2004 - 2016 . . . . . . . . 63
3.17. Gaps producidos por el SLC-off [18]. . . . . . . . . . . . . . . . . . . 64
3.18. Camino del escaner ETM+ con y sin el SLC, tomada del sitio de la
USGS Landsat Projects SLC-off [20]. . . . . . . . . . . . . . . . . . . 64
3.19. Tecnica de relleno de gaps . . . . . . . . . . . . . . . . . . . . . . . . 68
3.20. Diagrama metodologico. . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.21. Proceso de Stack Layer para imagenes Landsat 7-ETM+ . . . . . . . 70
3.22. Proceso de Stack Layer para imagenes Landsat 8 OLI/TIRS. . . . . . 70
3.23. Proceso de calculo del Indice espectral NDVI. . . . . . . . . . . . . . 72
3.24. Proceso de calculo del Indice espectral NDVI para los anos 2004-2016. 72
3.25. Proceso de calculo del Indice espectral NDWI. . . . . . . . . . . . . . 73
3.26. Proceso de calculo del Indice espectral NDWI para los anos 2004-2016. 73
3.27. Proceso de calculo del Indice espectral NDDI. . . . . . . . . . . . . . 74
3.28. Proceso de calculo del Indice espectral NDDI para los anos 2004-2016. 75
3.29. Imagenes de los resultados de los Indices de sequıa 2004 - 2016 Lago
Poopo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.30. Mapas de sequıa 2004 - 2016. . . . . . . . . . . . . . . . . . . . . . . 77
3.31. Proceso de Clasificacion imagen ano 2016. . . . . . . . . . . . . . . . 78
3.32. Cambios del Lago Poopo, anos 2015 y 2016. . . . . . . . . . . . . . . 79
3.33. Ganancia de humedad y perdidas de superficie de los anos 2004-2016. 80
3.34. Lago Urmıa, Iran anos 2004, 2015 y 2016. . . . . . . . . . . . . . . . 81
3.35. Climograma aproximado de la Ciudad de Urmıa [27] . . . . . . . . . 83
3.36. Gaps producidos por el SLC-off. . . . . . . . . . . . . . . . . . . . . . 84
Indice de figuras 9
3.37. Diagrama metodologico. . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.38. Proceso de Stack Layer para imagenes Landsat 7-ETM+. . . . . . . . 86
3.39. Proceso de Stack Layer para imagenes Landsat 8-OLI/TIRS. . . . . . 87
3.40. Proceso de fusion de la imagen multiespectral con la Pancromatica. . 87
3.41. Proceso de calculo del Indice espectral NDVI para los anos 2004-2016. 89
3.42. Proceso de calculo del Indice espectral NDWI para los anos 2004-2016. 89
3.43. Proceso de calculo del Indice espectral NDDI para los anos 2004-2016 90
3.44. Imagenes de Indices de sequıa 2004 - 2016 Lago Urmıa. . . . . . . . . 91
3.45. Imagenes de la Clasificacion No Supervisada: K-means 2004 - 2016
Lago Urmıa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
3.46. Imagenes de la Clasificacion Supervisada: Arbol de Decision 2004 -
2016 Lago Urmıa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.47. Perdida de superficie acuosa y aumento de la superficie humeda. . . . 96
3.48. Ganancia de humedad y perdida de superficie de los anos 2004-2014,
2004-2016 y 2014-2016 . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Indice de tablas
2.1. Rangos del Espectro Electromagnetico. . . . . . . . . . . . . . . . . . 18
2.2. Sensores multi-espectrales de media resolucion espacial. . . . . . . . . 24
2.3. Landsat 7-ETM+ y Caracterısticas[9] . . . . . . . . . . . . . . . . . . 25
2.4. Distribucion de las bandas OLI/TIRS . . . . . . . . . . . . . . . . . . 25
2.5. Parametros para la conversion a reflectividades de la imagenes Landsat5. 32
3.1. Promedio mensual de Temperatura y Precipitaciones del ano 2004. . . 47
3.2. Promedio mensual de Temperatura y Precipitaciones del ano 2005. . . 48
3.3. Promedio mensual de Temperatura y Precipitaciones del ano 2006. . . 49
3.4. Promedio mensual de Temperatura y Precipitaciones del ano 2007. . . 50
3.5. Promedio mensual de Temperatura y Precipitaciones del ano 2008. . . 51
3.6. Promedio mensual de Temperatura y Precipitaciones del ano 2009. . . 52
3.7. Promedio mensual de Temperatura y Precipitaciones del ano 2010. . . 53
3.8. Promedio mensual de Temperatura y Precipitaciones del ano 2011. . . 54
3.9. Promedio mensual de Temperatura y Precipitaciones del ano 2012. . . 55
3.10. Promedio mensual de Temperatura y Precipitaciones del ano 2013. . . 56
3.11. Promedio mensual de Temperatura y Precipitaciones del ano 2014. . . 57
3.12. Promedio mensual de Temperatura y Precipitaciones del ano 2015. . . 58
3.13. Promedio mensual de Temperatura y Precipitaciones del ano 2016. . . 59
3.14. Temperatura y Precipitaciones del ano 2004-2016. . . . . . . . . . . . 61
3.15. Total de precipitaciones anuales del ano 2004 - 2016 . . . . . . . . . . 62
3.16. Imagenes satelitales con problemas de gaps. . . . . . . . . . . . . . . 67
3.17. Imagenes satelitales con problemas de gaps. . . . . . . . . . . . . . . 84
3.18. Rango de las clases . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
10
Capıtulo 1
Introduccion
Los efectos del cambio climatico en los ultimos anos como consecuencia de factores
naturales o antropicos, como la deforestacion, minerıa, mala gestion del agua o el
incremento de gases de efecto de invernadero han provocado que la sociedad comience
a tomar conciencia de esta problematica que afecta a nuestro planeta.
De ahı que la gestion ambiental haya cobrado una especial importancia, con la
ayuda de herramientas de Teledeteccion que puedan analizar y prevenir las agresiones
que se producen en el medio ambiente, ası como restablecer en lo posible el equilibrio
en zonas que ya han sido afectadas por los efectos negativos del cambio climatico.
((La sequıa es una consecuencia de dichos aspectos negativos del cambio climatico,
ha afectado a la vida de las plantas, los animales y humanos; principalmente desde
que la demanda de agua para uso humano e industrial sobrepasa la disponibilidad de
este recurso natural)) [1].
La escasez continuada de lluvias y precipitaciones produce una sequıa meteo-
rologica, posiblemente por efectos de temperaturas altas, vientos de fuerte intensidad,
baja humedad, evapotranspiracion, etc. Este aspecto conlleva una sequıa hidrologica
cuando las reservas de agua disponibles en acuıferos, rıos, lagos y presas caen por
debajo de las demandas medioambientales.
En este sentido, la Teledeteccion es una tecnologıa que provee de imagenes en di-
ferentes fechas, cuya informacion permite realizar el analisis de deteccion de cambios
y seguimientos de la evolucion de los reservorios acuıferos.
11

Capıtulo 1. Introduccion 12
A partir de las imagenes multibanda, compuestas por diversas bandas correspon-
dientes a las respuestas espectrales a los diferentes intervalos del espectro electro-
magnetico, pueden calcularse una serie de ındices espectrales para realizar el segui-
miento temporal de la cantidad de agua en los lagos.
1.1. Objetivo de la tesis
El objetivo general de esta tesis es explorar las imagenes satelitales mediante
operaciones algebraicas con ındices espectrales, con el fin de realizar un seguimiento
temporal de deteccion de los cambios que sufren los reservorios acuıferos.
El ındice espectral en que se basara el desarrollo de esta investigacion, sera el
ındice de diferencia normalizada de sequıa (NDDI), ya que a partir de este ındice se
estableceran los mapas de sequıa que permitiran ayudar a analizar la deteccion de
cambios ocasionados en los mismos.
Para lograr este objetivo se han planteado los siguientes objetivos especıficos:
Seleccionar las imagenes mas adecuadas para este estudio.
Realizar los Climogramas en las areas de estudio.
Adecuar las imagenes satelitales.
Seleccionar los ındices espectrales.
Establecer una metodologıa de trabajo.
Aplicar la metodologıa a otros lagos.
1.2. Organizacion de la tesis
La organizacion de esta tesis se ha realizado consideran los objetivos especıficos
descritos anteriormente desglosados en los siguientes capıtulos, de los que se indica
un breve resumen que se describe a continuacion:

Capıtulo 1. Introduccion 13
En el capitulo 2, se detallan las principales caracterısticas del area de Telede-
teccion, enfocadas especialmente a la deteccion de cambios, pre-clasificacion y post-
clasificacion. Se hace un especial enfasis en los ındices espectrales mas representati-
vos, para este caso de estudio el ındice de diferencia normalizada de sequıa (NDDI),
servira como referencia en el desarrollo de esta Investigacion.
En el capitulo 3, se incluye la propuesta de la metodologıa con una previa selec-
cion de las imagenes satelitales, luego se describe en detalle la nueva metodologıa,
para finalmente presentar la aplicacion en dos reservorios acuıferos.
En el capitulo 4 se describe las conclusiones recopiladas en el desarrollo de este
trabajo.
Capıtulo 2
Estado del Arte
2.1. Teledeteccion
2.1.1. Conceptos Generales
La palabra Teledeteccion proviene de la traduccion dada por los franceses
((Teledetection)) en 1967, al termino anglosajon ((remote sensing)) y que puede de-
finir como ((la adquisicion de informacion sobre un objeto a distancia, es decir, sin
que haya contacto material entre el objeto o sistema observado y el observador)) [2].
Es una tecnica que permite adquirir imagenes de la superficie terrestre, marina
y de la atmosfera desde sensores instalados en plataformas aeroespaciales. Por ser
una tecnica en la que no se esta en contacto directo con el objeto, requiere que
entre el sensor y el objeto haya un flujo de informacion, el que es conocido como
((radiacion electromagnetica)) que puede ser emitida por el objeto o proceder de
otro cuerpo y haber sido reflejada por este. Todos los cuerpos u objetos (seres vivos,
planetas u objetos inanimados) emiten radiacion electromagnetica. La cantidad y
tipo de radiacion que emiten depende basicamente de su energıa. El mayor emisor
de esta radiacion en el sistema solar es el Sol, y la radiacion que la Tierra y los
objetos situados en ella reflejan, es la que se utiliza comunmente en Teledeteccion.
Otro tipo de emision puede provenir del mismo sensor, que incorpora un sistema de
fuente de radiacion propia [3].
Nuestros sentidos perciben un objeto solo cuando pueden descifrar la informacion
14

Capıtulo 2. Estado del Arte 15
que este les envıa. Por ejemplo, el ser humano es capaz de ver un arbol porque los ojos
(considerados como el sensor remoto perfecto), reciben y traducen convenientemente
una energıa luminosa procedente del mismo. Esta senal no es originada por el arbol,
sino por un foco energetico exterior que le ilumina. Por tal motivo, no es posible
para el ser humano percibir ese arbol en plena oscuridad.
Este sencillo ejemplo sirve para introducir los tres principales elementos de cual-
quier sistema de teledeteccion: sensor (el ojo), objeto (arbol) y el flujo energetico que
permite poner a ambos en relacion. En el caso del ojo, ese flujo procede del objeto
por reflexion de la luz solar. Podrıa tambien tratarse de un tipo de energıa emitida
por el propio objeto, o incluso por el sensor. Estas son precisamente, las tres formas
de adquirir informacion a partir de un sensor remoto: Por reflexion, por emision y
por emision-reflexion [2].
El principio base de la Teledeteccion como ya se ha mencionado anteriormente,
es el resultado en algunos elementos fundamentales que se describen a continuacion:
Figura 2.1: Principales elementos de un sistema de Teledeteccion.
1. Fuente de energıa o iluminacion
2. Radiacion y medio de transmision (atmosfera)
Capıtulo 2. Estado del Arte 16
3. Interaccion con el objeto
4. Captura de informacion (sensor, sin contacto directo con el objeto)
5. Transmision, recepcion y almacenamiento de informacion
6. Interpretacion y analisis de la informacion
7. Aplicacion de la informacion
Cabe destacar que la Teledeteccion es una tecnica que presenta numerosas ventajas
de las cuales se detallan algunas:
Dispone de largas series de imagenes que permiten la realizacion de predicciones
estadısticas de evolucion y tendencia.
Permite realizar estudios tanto a nivel atmosferico (radiacion recibida y re-
flejada, temperatura y humedad, agua en sus diferentes estados, viento, ozono,
dioxido de carbono, aerosoles,..) como a nivel de la superficie terrestre
(topografıa, humedad, temperatura, oleaje, corrientes marinas,..)
Aporta datos de manera mas exacta, rapida y fiable que los metodos tradicio-
nales.
Determina el desarrollo y avance de potenciales amenazas: olas de calor, cam-
bios en la forma de los conos volcanicos, etc.
El uso de la Teledeteccion para la observacion de la superficie terrestre proporciona,
una vision repetitiva y constante de la Tierra, util para monitoreo de cambios y
evaluacion del impacto de las actividades humanas [4].
2.1.1.1. Principios de Radiacion
Se asume que la radiacion se produce como resultado de oscilaciones en los campos
electrico y magnetico en las inmediaciones de los objetos. Estas oscilaciones generan
ondas que contienen 2 campos de fuerzas ortogonales entre si, electrico y magnetico
y transmiten la energıa. Los rayos X, las ondas de radio, los rayos ultravioleta y la
region del visible son formas similares de energıa electromagnetica [3].
Capıtulo 2. Estado del Arte 17
2.1.1.2. Espectros Electromagneticos
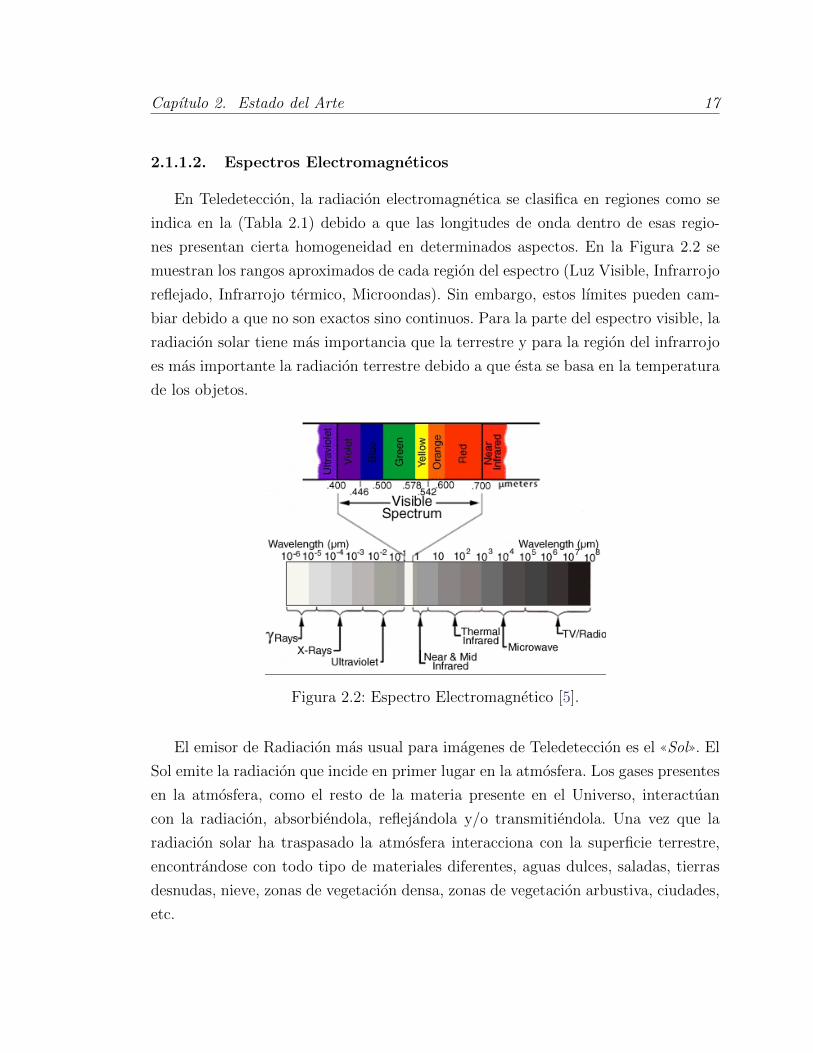
En Teledeteccion, la radiacion electromagnetica se clasifica en regiones como se
indica en la (Tabla 2.1) debido a que las longitudes de onda dentro de esas regio-
nes presentan cierta homogeneidad en determinados aspectos. En la Figura 2.2 se
muestran los rangos aproximados de cada region del espectro (Luz Visible, Infrarrojo
reflejado, Infrarrojo termico, Microondas). Sin embargo, estos lımites pueden cam-
biar debido a que no son exactos sino continuos. Para la parte del espectro visible, la
radiacion solar tiene mas importancia que la terrestre y para la region del infrarrojo
es mas importante la radiacion terrestre debido a que esta se basa en la temperatura
de los objetos.
Figura 2.2: Espectro Electromagnetico [5].
El emisor de Radiacion mas usual para imagenes de Teledeteccion es el ((Sol)). El
Sol emite la radiacion que incide en primer lugar en la atmosfera. Los gases presentes
en la atmosfera, como el resto de la materia presente en el Universo, interactuan
con la radiacion, absorbiendola, reflejandola y/o transmitiendola. Una vez que la
radiacion solar ha traspasado la atmosfera interacciona con la superficie terrestre,
encontrandose con todo tipo de materiales diferentes, aguas dulces, saladas, tierras
desnudas, nieve, zonas de vegetacion densa, zonas de vegetacion arbustiva, ciudades,
etc.
Capıtulo 2. Estado del Arte 18
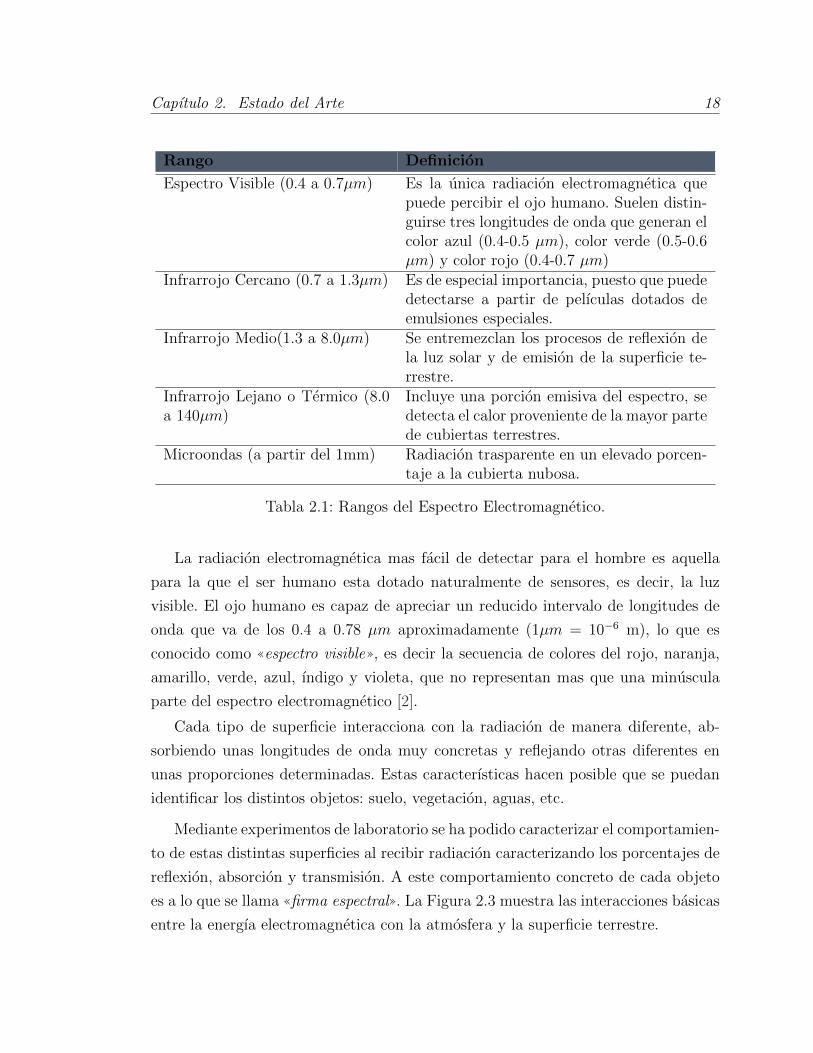
Rango Definicion
Espectro Visible (0.4 a 0.7µm) Es la unica radiacion electromagnetica quepuede percibir el ojo humano. Suelen distin-guirse tres longitudes de onda que generan elcolor azul (0.4-0.5 µm), color verde (0.5-0.6µm) y color rojo (0.4-0.7 µm)
Infrarrojo Cercano (0.7 a 1.3µm) Es de especial importancia, puesto que puededetectarse a partir de pelıculas dotados deemulsiones especiales.
Infrarrojo Medio(1.3 a 8.0µm) Se entremezclan los procesos de reflexion dela luz solar y de emision de la superficie te-rrestre.
Infrarrojo Lejano o Termico (8.0a 140µm)
Incluye una porcion emisiva del espectro, sedetecta el calor proveniente de la mayor partede cubiertas terrestres.
Microondas (a partir del 1mm) Radiacion trasparente en un elevado porcen-taje a la cubierta nubosa.
Tabla 2.1: Rangos del Espectro Electromagnetico.
La radiacion electromagnetica mas facil de detectar para el hombre es aquella
para la que el ser humano esta dotado naturalmente de sensores, es decir, la luz
visible. El ojo humano es capaz de apreciar un reducido intervalo de longitudes de
onda que va de los 0.4 a 0.78 µm aproximadamente (1µm = 10−6 m), lo que es
conocido como ((espectro visible)), es decir la secuencia de colores del rojo, naranja,
amarillo, verde, azul, ındigo y violeta, que no representan mas que una minuscula
parte del espectro electromagnetico [2].
Cada tipo de superficie interacciona con la radiacion de manera diferente, ab-
sorbiendo unas longitudes de onda muy concretas y reflejando otras diferentes en
unas proporciones determinadas. Estas caracterısticas hacen posible que se puedan
identificar los distintos objetos: suelo, vegetacion, aguas, etc.
Mediante experimentos de laboratorio se ha podido caracterizar el comportamien-
to de estas distintas superficies al recibir radiacion caracterizando los porcentajes de
reflexion, absorcion y transmision. A este comportamiento concreto de cada objeto
es a lo que se llama ((firma espectral)). La Figura 2.3 muestra las interacciones basicas
entre la energıa electromagnetica con la atmosfera y la superficie terrestre.
Capıtulo 2. Estado del Arte 19
Figura 2.3: Interacciones basicas entre la energıa electromagnetica con la atmosferay la superficie terrestre.
2.1.2. Sensores remotos
Los sensores son instrumentos susceptibles de detectar la senal electromagnetica
(Radiacion reflejada o emitida) que les llega de la tierra y la atmosfera y convertirla en
una magnitud fısica que puede ser tratada o grabada. Los sensores pueden convertir
la senal electromagnetica en un formato analogico (fotografıa) o digital (imagen).
Para llevar a cabo la observacion de la superficie, los sensores son instalados en
plataformas, fijas o moviles: gruas, cometas, globos, aviones, cohetes o satelites. Las
caracterısticas de la imagen registrada depende en gran medida del tipo del sensor
utilizado y de la distancia al suelo desde el cual se realiza la adquisicion de datos [3].
2.1.2.1. Caracterısticas de los Sensores
Las caracterısticas espaciales del sensor hacen referencia a la porcion de la su-
perficie terrestre de la cual obtienen informacion [2] y se determinan por magnitudes
tales como:
Capıtulo 2. Estado del Arte 20
Campo de vision instantanea (Instantaneous Field of View – IFOV). De-
pende de la apertura del dispositivo optico del sensor y determina las dimen-
siones maximas de la superficie terrestre que puede observarse en cada instante
desde el sensor. Se expresa en radianes, aunque se suele usar la longitud que
sobre la superficie terrestre corresponde a ese angulo, lo que coincide con las
dimensiones del pıxel.
Campo total de observacion: se define para los sensores de barrido y de-
pende del angulo de oscilacion o de rotacion del espejo y de la duracion de la
pasada. En funcion de la altitud del satelite, se obtiene la longitud de la lınea
de barrido, que se expresa en m o Km.
Pixel: (Traducido del termino anglosajon ((picture element))) determina el ta-
mano de la muestra. La senal de salida del detector sufre un muestreo a una
frecuencia que depende del sistema de adquisicion de los datos, esto se refiere
a la velocidad del barrido. Dentro de las cualidades de un sistema sensor, hay
que destacar la resolucion, que es una medida de la capacidad de un siste-
ma optico para distinguir senales que estan especialmente cercanas o que son
espectralmente similares [2].
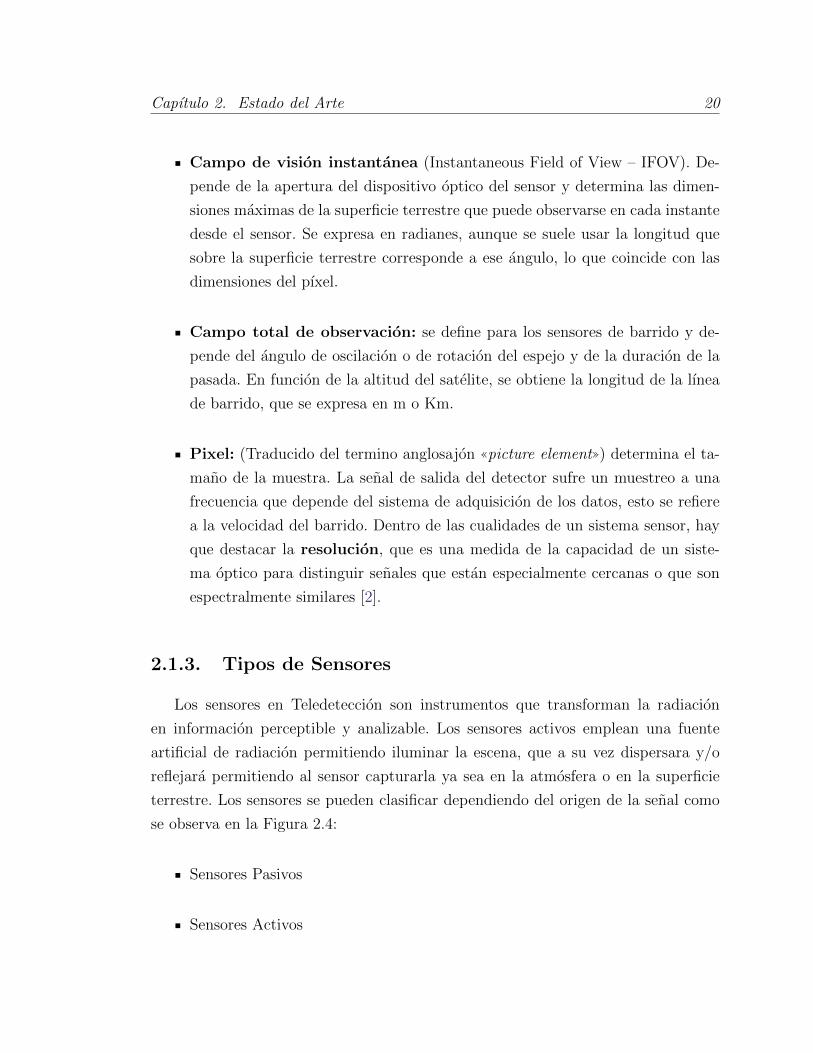
2.1.3. Tipos de Sensores
Los sensores en Teledeteccion son instrumentos que transforman la radiacion
en informacion perceptible y analizable. Los sensores activos emplean una fuente
artificial de radiacion permitiendo iluminar la escena, que a su vez dispersara y/o
reflejara permitiendo al sensor capturarla ya sea en la atmosfera o en la superficie
terrestre. Los sensores se pueden clasificar dependiendo del origen de la senal como
se observa en la Figura 2.4:
Sensores Pasivos
Sensores Activos
Capıtulo 2. Estado del Arte 21
2.1.3.1. Sensores Pasivos
Registran la radiancia reflejada o emitida por la superficie terrestre, trabajan en
todo el rango espectral y se basan en la deteccion de las caracterısticas reflectantes
del sistema observado (objeto) es decir, el sensor cumple la funcion de registrar la ra-
diacion emitida por el sistema observado o la radiacion solar reflejada. Se agrupan en
tres tipos de sensores fotograficos (por ejemplo las camaras fotograficas), los sensores
opticos electronicos (exploradores de barrido y empuje y las camaras de vidicon) y
los sensores de antena (radiometros de micro-ondas) [6].
2.1.3.2. Sensores Activos
Generan ellos mismos la radiacion que miden tras ser reflejada en el sensor,
cumple con una doble funcion ya que actua activamente produciendo una senal (onda
electromagnetica). La informacion obtenida procede de la comparacion entre la senal
emitida y la senal reflejada. El sensor activo mas conocido es el Radar, bastante
utilizado en aplicaciones militares, ası como en control de trafico aereo. El Radar,
trabaja en la region de las micro-ondas. Por otra parte, esta el sensor activo Lidar,
el cual opera con luz polarizada (laser)[6].
(a) Sensor Pasivo (b) Sensor Activo
Figura 2.4: Tipos de Sensores.
Capıtulo 2. Estado del Arte 22
2.1.4. Resolucion de un Sistema Sensor
La resolucion de un sistema sensor en teledeteccion, es su habilidad para registrar
la informacion en detalle de las distintas cubiertas. La ((resolucion)) depende de la
capacidad de los sensores para distinguir variaciones de la energıa electromagnetica,
del detalle espacial que captura y del numero y ancho de las bandas que alberga [3].
A continuacion se definen los tipos de resolucion:
2.1.4.1. Resolucion Espectral
Indica el numero y anchura de bandas espectrales que puede discriminar el sen-
sor. Cuanto mayor sea esta resolucion se tendra informacion del comportamiento de
una misma cobertura en un numero mayor de diferentes bandas espectrales. Esta re-
solucion facilita la caracterizacion espectral de las diferentes cubiertas y cuanto mas
estrechas sean estas mas coherente es la informacion capturada. Bandas muy anchas
suponen registrar un valor promedio que puede encubrir la diferenciacion espectral
entre cubiertas de interes.
2.1.4.2. Resolucion Espacial
Es el tamano del pıxel y se refiere a la finura de detalles visibles en una imagen:
cuanto menor es el area representada por cada pıxel en una imagen digital mayores
son los detalles que pueden ser captados y mayor es la resolucion espacial.
2.1.4.3. Resolucion Radiometrica
Capacidad para detectar variaciones en la radiancia espectral que recibe, indicada
por los niveles de gris recogidos. Cuanto mayor sea la precision radiometrica mejor
sera la interpretacion. El nivel de grises de una imagen esta definido por la siguiente
ecuacion:
2n= Numero de niveles de Gris, siendo n el numero de bits en una imagen.
Se puede ver un ejemplo en la Figura 2.5, en (a) la imagen tiene una resolucion
de 8 bits, mientras que en (b) la resolucion disminuye a 2 bits radiometrica.
Capıtulo 2. Estado del Arte 23
(a) 8bits(0-255) (b) 2bits(0-3)
Figura 2.5: Niveles de Grises [18].
2.1.4.4. Resolucion Temporal
Es la capacidad de un sistema para producir imagenes de una misma area geografi-
ca en diversos perıodos de tiempo. Indica la frecuencia de cobertura de un sistema
sensor. Esta relacionada con la altura de observacion y la velocidad de la orbita,
ası como con el campo de vision que ofrezca el sensor. Al igual que con los tipos de
resolucion antes vistos.
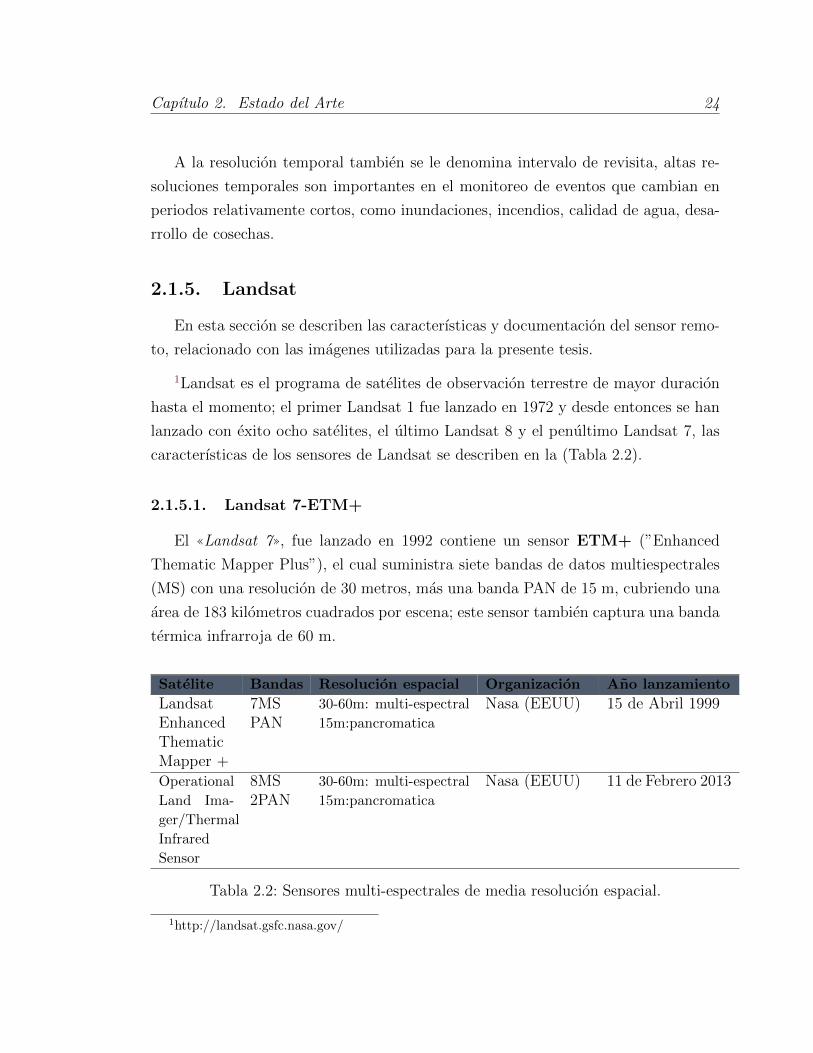
Es una medida de la frecuencia con la que un satelite es capaz de obtener imagenes
de una determinada area. La Figura 2.6 muestra dos imagenes de satelite Landsat
(a) Mono Lake, 2003 (b) Mono Lake, 2015
Figura 2.6: Sistema de seguimiento de Lake Mono [18].
con el sensor TM y el sensor OLI/TIRS, como un ejemplo de los cambios ocurridos
en un mismo sitio.
Capıtulo 2. Estado del Arte 24
A la resolucion temporal tambien se le denomina intervalo de revisita, altas re-
soluciones temporales son importantes en el monitoreo de eventos que cambian en
periodos relativamente cortos, como inundaciones, incendios, calidad de agua, desa-
rrollo de cosechas.
2.1.5. Landsat
En esta seccion se describen las caracterısticas y documentacion del sensor remo-
to, relacionado con las imagenes utilizadas para la presente tesis.
1Landsat es el programa de satelites de observacion terrestre de mayor duracion
hasta el momento; el primer Landsat 1 fue lanzado en 1972 y desde entonces se han
lanzado con exito ocho satelites, el ultimo Landsat 8 y el penultimo Landsat 7, las
caracterısticas de los sensores de Landsat se describen en la (Tabla 2.2).
2.1.5.1. Landsat 7-ETM+
El ((Landsat 7)), fue lanzado en 1992 contiene un sensor ETM+ (”Enhanced
Thematic Mapper Plus”), el cual suministra siete bandas de datos multiespectrales
(MS) con una resolucion de 30 metros, mas una banda PAN de 15 m, cubriendo una
area de 183 kilometros cuadrados por escena; este sensor tambien captura una banda
termica infrarroja de 60 m.
Satelite Bandas Resolucion espacial Organizacion Ano lanzamiento
LandsatEnhancedThematicMapper +
7MSPAN
30-60m: multi-espectral
15m:pancromatica
Nasa (EEUU) 15 de Abril 1999
Operational
Land Ima-
ger/Thermal
Infrared
Sensor
8MS2PAN
30-60m: multi-espectral
15m:pancromatica
Nasa (EEUU) 11 de Febrero 2013
Tabla 2.2: Sensores multi-espectrales de media resolucion espacial.
1http://landsat.gsfc.nasa.gov/
Capıtulo 2. Estado del Arte 25
A continuacion se muestra la (Tabla 2.3) con el numero de bandas y caracterısticas
que posee el sensor Landsat 7-ETM+.
Numero banda Longitud de Onda Resolucion Espacial Zona del espectro1 0.45 - 0.515 µm 30 m luz visible, azul2 0.525 - 0.605 µm 30 m luz visible verde3 0.63 - 0.690 µm 30 m luz visible roja4 0.75 - 0.90 µm 30 m infrarrojo cercano5 1.55 - 1.75 µm 30 m infrarrojo medio6 10.40 -12.5 µm 60 m infrarrojo termico7 2.09 - 2.35 µm 30 m infrarrojo medio
PAN 0.52 - 0.90 µm 15 m pancromatica
Tabla 2.3: Landsat 7-ETM+ y Caracterısticas[9]
2.1.5.2. Landsat 8 OLI/TIRS
2 ((Landsat 8)), su entrada en servicio se inicio el 11 de Febrero del 2013. Lleva
dos instrumentos fundamentales OLI (”Operational Land Image”), sensor que capta
el espectro visible, infrarrojo cercano (NIR) e infrarrojo de onda corta (SWIR) y
los TIRS1 y TIRS2 (”Thermal Infrared Sensor”) que mide la temperatura de la
superficie terrestre mediante dos bandas del infrarrojo termico (10 y 11).
Numero banda Longitud de Onda Resolucion Espacial Zona del espectro1 0.43 - 0.45 µm 30 m aerosol costero2 0.45 - 0.51 µm 30 m azul3 0.53 - 0.59 µm 30 m verde4 0.64 - 0.67 µm 30 m rojo5 0.85 - 0.88 µm 30 m Infrarrojo cercano (NIR)6 1.57 - 1.65 µm 30 m SWIR 17 2.11 - 2.29 µm 30 m SWIR 28 0.50 - 0.68 µm 15 m pancromatico9 1.36 - 1.38 µm 30 m cirrus10 10.60 - 11.19 µm 100 m Infrarrojo termico (TIRS) 111 11.50 - 12.51 µm 100 m Infrarrojo termico (TIRS) 2
Tabla 2.4: Distribucion de las bandas OLI/TIRS
2http://landsat.gsfc.nasa.gov/
Capıtulo 2. Estado del Arte 26
Proporciona una mejora de los instrumentos que las misiones de Landsat ante-
riores, incorporando dos nuevas bandas espectrales, como se puede observar en la
(Tabla 2.4):
Un canal de longitud de onda menor del visible (banda 1); disenado especıfi-
camente para los recursos hıdricos e investigaciones en zonas costeras.
Un nuevo canal infrarrojo (banda 9) para la deteccion de nubes.
Adicionalmente incorpora una nueva banda para el control de calidad incluida
con cada producto generando informacion mas detallada sobre la presencia de
nubes, agua y nieve.
Por otra parte el sensor TIRS recoge dos bandas espectrales de informacion termi-
ca de la superficie terrestre basados en los equivalentes anteriores de los sensores.
2.2. Tratamiento Previo de la Imagenes
Consiste en el procesamiento inicial de los datos crudos para corregir las distor-
siones radiometricas y geometricas de la imagen y eliminar el ruido. Las distorsiones
radiometricas obedecen a mecanismos que alteran los valores de brillo de los pıxeles
y se deben fundamentalmente a interferencias atmosfericas y a efectos asociados a la
instrumentacion [7].
En la Figura 2.7 se indica una imagen digital/satelital que se puede considerar
en forma generica como una matriz (bidimensional) discretizada en niveles de grises
ND (Nivel Digital) con una expresion, por cada celda (cada celda/elemento de la
matriz o pıxel):
ND=f(x,y) (2.1)
f(x, y) ∼=
f(0, 0) · · · f(0, N − 1)
......
f(M − 1, 0) · · · f(M − 1, N − 1)
La imagen no siempre es cuadrada, se suele denotar con (M filas y N columnas)
Capıtulo 2. Estado del Arte 27
Figura 2.7: Imagen digital/satelital (forma decimal)[8].
Cada pıxel representa un valor de la radiacion electromagnetica total refle-
jada Q por cada pıxel en un instante dado.
ND=f(x,y)=f(energia radiante recibida Q )=i(x,y).r(x,y) (2.2)
siendo:
i(x, y) = f(iluminacion) 0 < i <∞r(x, y) = f(reflectancia del objeto) 0 < r < 1
Su tamano tendra que ver, con la resolucion espacial de la imagen [8].
Las imagenes de satelite estan sometidas a una serie de interferencias que hacen
que la informacion que se quiere obtener aparezca distorsionada por una serie de erro-
res. Conviene recordar previamente que una imagen captada por un sensor/satelite,
tiene los siguientes componentes:
∗ Espacial. La posicion especifica de cada pıxel en la imagen a una resolucion
y un sistema de captura dados.
∗ Radiometrica. Segun su codificacion y estructura nos definira un rango de
niveles de grises por pıxel. Ejemplo: con 8 bits/pıxel se tendrıan 28 = 256
Niveles de Grises.
∗ Espectral. La energıa de cada pıxel por banda −Q− se dividira en el mo-
mento de la captura por el sensor, en zonas del espectro electromagnetico,
registrandose cada zona en una banda −Qi−.
∗ Temporal. La informacion de cada pıxel por banda −Qi− y codificada en
valor de ND, corresponde a un instante dado.

Capıtulo 2. Estado del Arte 28
2.2.1. Correccion Radiometrica
La correccion radiometrica tambien implica otra operacion que no es exclusi-
vamente la perdida de lıneas o pıxeles. De hecho en algunos casos las estaciones
receptoras llevan a cabo algun tipo de correccion en el momento de recepcion de la
imagen.
2.2.1.1. Pıxeles o lıneas perdidas
Si se ha perdido el valor de algun pıxel la solucion mas simple serıa estimarlo
como la media de los valores del mismo pıxel en lıneas anteriores y posteriores (no
recomiendan utilizar pıxeles contiguos de la misma linea porque han sido captados
por el mismo detector que ha dado el fallo, por lo tanto son poco fiables).
NDi,j = round(NDi−1,j + NDi+1,j
2) (2.3)
Donde round indica redondeo al numero entero mas cercano y NDi,j nivel digital
presente.
No hay que olvidar que las diferentes bandas de una imagen estan altamente
correlacionadas y ademas los detectores de dos bandas diferentes no son los mismos.
Por lo tanto podrıa utilizarse el valor del pıxel faltante en una banda diferente para
mejorar la estimacion:
NDi,j,k = round(sksr
(NDi,j,r − (NDi+1,j,r −NDi−1,j,r
2+
NDi−1,j,k + NDi+1,j,k
2))) (2.4)
En caso que la imagen abarque un espacio amplio y cambiante resulta recomen-
dable calcular los coeficientes de correlacion y las desviaciones sk y sr en el entorno
cercano al pıxel perdido. Para detectar lıneas perdidas se compara la media de los
ND de una lınea con las medias de las lıneas anterior y posterior, para detectar
pıxeles perdidos se comparara el valor de un pıxel con los de los 8 pıxeles vecinos
mediante algun procedimiento de filtrado [9].

Capıtulo 2. Estado del Arte 29
2.2.1.2. Bandeado
Este fenomeno se debe a una mala calibracion entre detectores y resulta visible
en las zonas de baja radiancia (ejemplo: zonas marinas). El resultado es la aparicion
periodica de una banda mas clara u oscura que las demas. Para corregir el bandeado
se asume que, en caso de no haber, los histogramas obtenidos por cada uno de los
detectores serıan similares entre sı y similares al histograma global de la imagen que
se toma como referencia.
Se consigue eliminar este efecto desplazando los histogramas parciales de la ima-
gen, de tal manera que se obtenga el mismo valor promedio y misma desviacion tıpica
que para toda la banda (k). En primer lugar se calculan los coeficientes ak y bk para
una correlacion lineal de cada uno de los detectores.
bk =s
sk(2.5)
ak = m− bkmk (2.6)
Donde m y s son, respectivamente, la media y la desviacion tıpica del conjunto de
pıxeles de la imagen y mk y sk la media y la desviacion tıpica de los pıxeles obtenidos
por el detector k. Los ND (Niveles Digitales) de la imagen se calculan:
ND′i,j = akNDi,j + bk (2.7)
Donde ND′i,j es el nivel digital corregido, NDi,j es el nivel digital que presenta
el efecto de bandeado, ak y bk del ajuste de histogramas parciales ( de la parte de la
imagen defectuosa) respecto al histograma real [9].
2.2.2. Correccion Geometrica
Este proceso conlleva la transformacion de las coordenadas de los pıxeles de la
segunda imagen de tal forma que coincidan de manera precisa con las de la primera
(imagen de referencia). Se realiza mediante una transformacion polinomial de segun-
Capıtulo 2. Estado del Arte 30
do grado que se obtiene a partir de un conjunto de pares de puntos de control de
ambas imagenes [9].
2.2.2.1. Localizacion de los puntos
La deteccion automatica de pares de puntos de control en las imagenes es esencial
ya que ellos establecen las relaciones geometricas entre las imagenes. Estos puntos,
en un numero suficiente para hacer frente a los inevitables problemas de empareja-
miento erroneos, deben de ser lo mas precisos posible (con precision subpıxel) y estar
uniformemente distribuidos por toda la imagen [10].
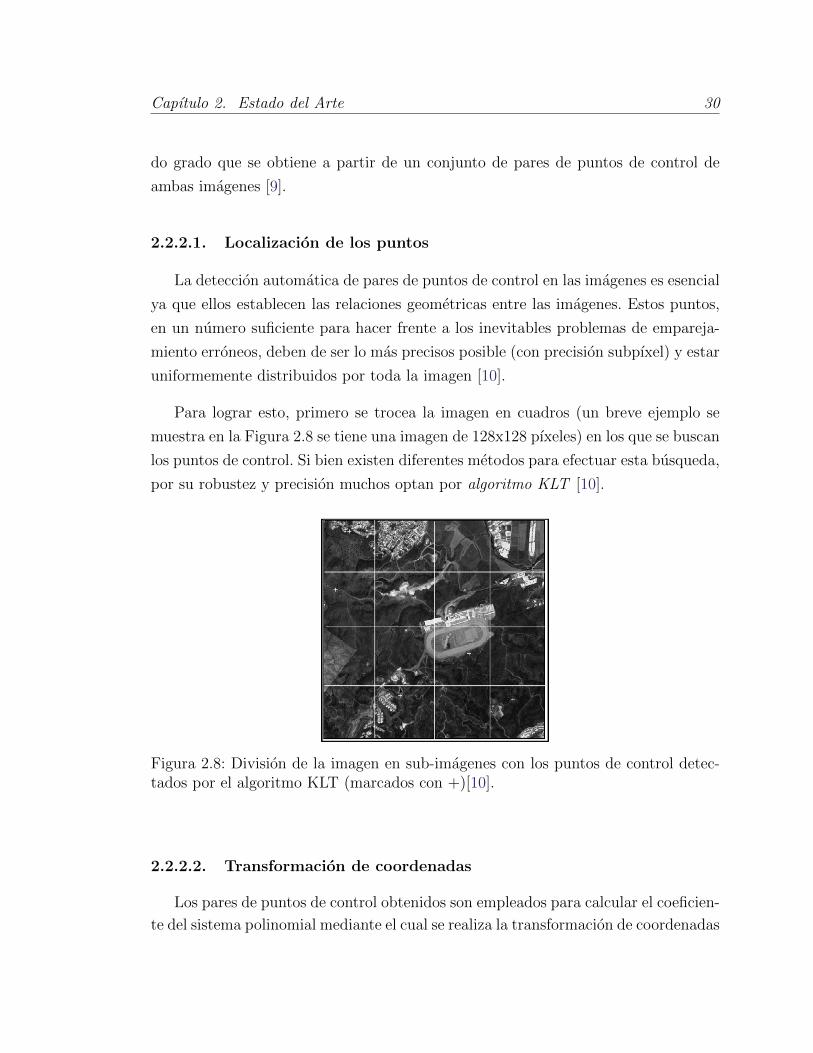
Para lograr esto, primero se trocea la imagen en cuadros (un breve ejemplo se
muestra en la Figura 2.8 se tiene una imagen de 128x128 pıxeles) en los que se buscan
los puntos de control. Si bien existen diferentes metodos para efectuar esta busqueda,
por su robustez y precision muchos optan por algoritmo KLT [10].
Figura 2.8: Division de la imagen en sub-imagenes con los puntos de control detec-tados por el algoritmo KLT (marcados con +)[10].
2.2.2.2. Transformacion de coordenadas
Los pares de puntos de control obtenidos son empleados para calcular el coeficien-
te del sistema polinomial mediante el cual se realiza la transformacion de coordenadas

Capıtulo 2. Estado del Arte 31
a la nueva imagen corregida.
x′
= a0 + a1x + a2y + a3xy (2.8)
y′
= b0 + b1x + b2y + b3xy (2.9)
donde (x′, y
′) y (x, y) son las coordenadas de los pıxeles de la imagen corregida y
sin corregir respectivamente.
2.2.2.3. Transformacion de niveles de gris
Ahora se procede a calcular el nivel de gris de los pıxeles en la nueva imagen
corregida empleando una convolucion cubica que promedia el valor de 16 vecinos.
Este procedimiento de remuestreado, es mas costoso computacionalmente que otros
produce una mejor estimacion del nivel de gris [9].
2.2.3. Correccion Atmosferica
Trata de corregir problemas mecanicos en el sensor que generan valores erroneos
en pıxeles concretos. Por su parte, la correccion atmosferica trata de evaluar y elimi-
nar las distorsiones que la atmosfera introduce en los valores de radiancia que llegan
al sensor desde la superficie terrestre [9].
2.2.3.1. Conversion de los ND a valores de radiancia
Una imagen de satelite normal contiene unos valores numericos, los ya citados
niveles digitales (ND), que el satelite obtiene a partir de la energıa recibida mediante
una ecuacion lineal. Para recuperar los valores de energıa recibida es necesario aplicar
la inversa de esa ecuacion lineal.
Lsen,k = a0k + a1kNDK (2.10)
El termino k se refiere a cada una de las bandas del sensor Lsen1k es la Radia-
cion que recibio el sensor. En la siguiente (Tabla 2.5), aparecen los valores de estos
parametros para un ejemplo de Landsat 5, junto a los valores de irradiancia solar
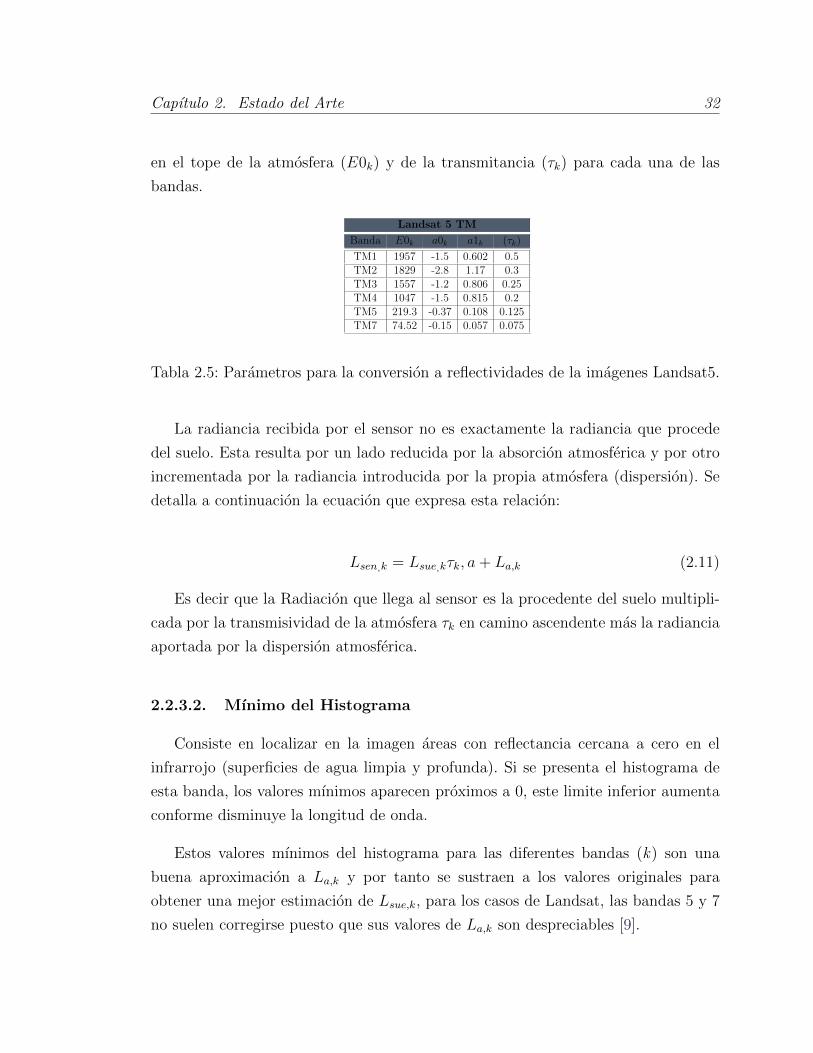
Capıtulo 2. Estado del Arte 32
en el tope de la atmosfera (E0k) y de la transmitancia (τk) para cada una de las
bandas.
Landsat 5 TM
Banda E0k a0k a1k (τk)
TM1 1957 -1.5 0.602 0.5TM2 1829 -2.8 1.17 0.3TM3 1557 -1.2 0.806 0.25TM4 1047 -1.5 0.815 0.2TM5 219.3 -0.37 0.108 0.125TM7 74.52 -0.15 0.057 0.075
Tabla 2.5: Parametros para la conversion a reflectividades de la imagenes Landsat5.
La radiancia recibida por el sensor no es exactamente la radiancia que procede
del suelo. Esta resulta por un lado reducida por la absorcion atmosferica y por otro
incrementada por la radiancia introducida por la propia atmosfera (dispersion). Se
detalla a continuacion la ecuacion que expresa esta relacion:
Lsen,k = Lsue,kτk, a+ La,k (2.11)
Es decir que la Radiacion que llega al sensor es la procedente del suelo multipli-
cada por la transmisividad de la atmosfera τk en camino ascendente mas la radiancia
aportada por la dispersion atmosferica.
2.2.3.2. Mınimo del Histograma
Consiste en localizar en la imagen areas con reflectancia cercana a cero en el
infrarrojo (superficies de agua limpia y profunda). Si se presenta el histograma de
esta banda, los valores mınimos aparecen proximos a 0, este limite inferior aumenta
conforme disminuye la longitud de onda.
Estos valores mınimos del histograma para las diferentes bandas (k) son una
buena aproximacion a La,k y por tanto se sustraen a los valores originales para
obtener una mejor estimacion de Lsue,k, para los casos de Landsat, las bandas 5 y 7
no suelen corregirse puesto que sus valores de La,k son despreciables [9].
Capıtulo 2. Estado del Arte 33
2.3. Indices Espectrales
Los ındices espectrales son usados para resaltar algunas caracterısticas particu-
lares de una imagen de satelite. Los mas conocidos son los que se detallan a conti-
nuacion:
2.3.1. Indice de Vegetacion de Diferenciacion Normalizada
Tambien conocido como NDVI por sus siglas en ingles, es un ındice usado para
estimar la cantidad, calidad y desarrollo de la vegetacion con base a la medicion, por
medio de sensores remotos instalados comunmente desde una plataforma espacial,
de la intensidad de la radiacion de ciertas bandas del espectro electromagnetico que
la vegetacion emite o refleja [12].
La utilizacion de estos ındices tiene su fundamento en el particular comporta-
miento radiometrico de la vegetacion. Una cubierta vegetal en buen estado de salud,
tiene una firma espectral que se caracteriza por el contraste entre la banda del rojo
(entre 0.6 y 0.7µm ), la cual es absorbida en gran parte por las hojas y el infrarrojo
cercano (entre 0.7 y 1.1µm), que es reflejada en su mayorıa. Se muestra un ejemplo
en la Figura 2.9 [13].
El ındice de Vegetacion de la Diferencia Normalizada se calcula mediante la si-
guiente expresion:
NVDI =NIR−R
NIR + R(2.12)
donde el NIR es la reflectividad en el infrarrojo cercano y R es la reflectividad
en el rojo.
El rango de valores de las reflexiones espectrales se encuentra entre el 0 y el 1;
ya que, tanto la reflectividad del infrarrojo cercano como la del rojo, son cocientes
de la radiacion reflejada sobre la radiacion entrante en cada banda espectral. Por
consecuencia de estos rangos de valores, el NDVI varıan su valor entre -1 y 1.
Capıtulo 2. Estado del Arte 34
Figura 2.9: Ejemplo de Indice espectral de vegetacion NDVI [18].
2.3.1.1. Ventajas del NDVI
A continuacion se detalla algunas ventajas del indice NDVI:
Gran sencillez en el calculo.
Facilita la interpretacion directa de los parametros biofısicos de la vegetacion.
Permite realizar una comparativa entre datos obtenidos por diferentes investi-
gadores.
El NDVI permite identificar la presencia de vegetacion verde en la superficie y
caracterizar su distribucion espacial ası como la evolucion de su estado a lo largo
del tiempo. Esto esta determinado fundamentalmente por las condiciones climaticas
[12].
2.3.2. Indice de Diferencia Normalizado del Agua
Tambien conocido como NDWI por sus siglas en ingles, se utiliza como una
medida de la cantidad de agua que posee la vegetacion o el nivel de saturacion
de humedad que posee el suelo. El NDWI es una variacion del NDVI, si en la
ecuacion se invierte el orden del NIR y se cambia la banda roja por la verde, el
resultado sera contrario al NDVI, la vegetacion sera suprimida y los cuerpos de
agua se realzaran [14].
Capıtulo 2. Estado del Arte 35
Generalmente se calcula a partir de imagenes satelitales que brindan informa-
cion de reflectancia de una determinada zona en diferentes bandas de frecuencia del
espectro electromagnetico, en la Figura 2.10 se muestra un ejemplo del ındice NDWI.
El Indice de Diferencia Normalizado del Agua se calcula mediante la siguiente
expresion:
NVWI =NIR− SWIR
NIR + SWIR(2.13)
donde NIR es el valor en la banda del infrarrojo cercano y SWIR del infrarrojo
corto (porcion del infrarrojo medio).
Los valores del NDWI varıan entre -1 y 1, asociando valores positivos para
las superficies con agua o humedas y cero o negativo para el suelo y la vegetacion
terrestre.
Figura 2.10: Ejemplo de Indice espectral de agua NDWI [18].
2.3.2.1. Ventajas del NDWI
A continuacion se detallan algunas ventajas del indice NDWI:
Brinda informacion relevante para ser utilizada en modelos de balance hıdricos
o prediccion climatica.
Permite disenar mapas de peligro de incendios.
Resumiendo el NDWI permite estimar la cantidad de agua que posee la vegeta-
cion o el nivel de saturacion de humedad que posee el suelo [9].

Capıtulo 2. Estado del Arte 36
2.3.3. Indice de Diferenciacion Normalizada de Sequıa
El ındice NDDI destaca el diferente comportamiento entre el NDVI, que esta mas
relacionado con el vigor de la vegetacion, es decir, con la estructura joven de la hoja
y su contenido en clorofila, y el NDWI, mas relacionado con el contenido de agua en
esa hoja. Un valor alto del NDDI corresponde a una mayor incidencia de la sequıa
que no puede captar por separado cada uno de los ındices: en la epoca de estiaje.
Estos ındices pueden tener un tendencia diferente de manera que indiquen un me-
nor contenido de agua NDWI respecto al vigor vegetal indicado por NDVI lo que
indica situacion de sequıa, que se puede visualizar en la Figura 2.11 [15].
El Indice de Diferencia Normalizado de Sequıa se calcula mediante la siguiente
expresion:
NDDI =NDV I −NDWI
NDV I + NWDI(2.14)
Ya que el NDVI y el NDWI varıan en un rango de -1 a +1, para el calculo
del NDDI estos valores fueron convertidos a 8 bits (0-255), por lo cual el rango del
NDDI variara entre -1 y +1 [11].
Figura 2.11: Ejemplo del Indice espectral de sequıa NDDI [18].
2.3.3.1. Ventajas del NDDI
Facilidad de calculo.
Complemento optimo para los indicadores basados in-situ o de otros indicado-
res basados en datos de Teledeteccion.
Capıtulo 2. Estado del Arte 37
Alternativa para realizar estudios de sequıa en pequenas regiones.
Facilidad para el seguimiento de cambios en regiones.
2.4. Clasificacion de Imagenes
Una de las grandes ventajas que posee el analisis de datos a traves del procesa-
miento digital, es la de extraer informacion tematica util. Para ello, se recurre a la
clasificacion de las imagenes.
La clasificacion se podrıa definir como, el procesamiento digital de imagenes que
contempla los procedimientos mediante los cuales un sistema automatico puede agru-
par los pıxeles de una imagen, en categorıas o clases, dentro de un espacio multies-
pectral.
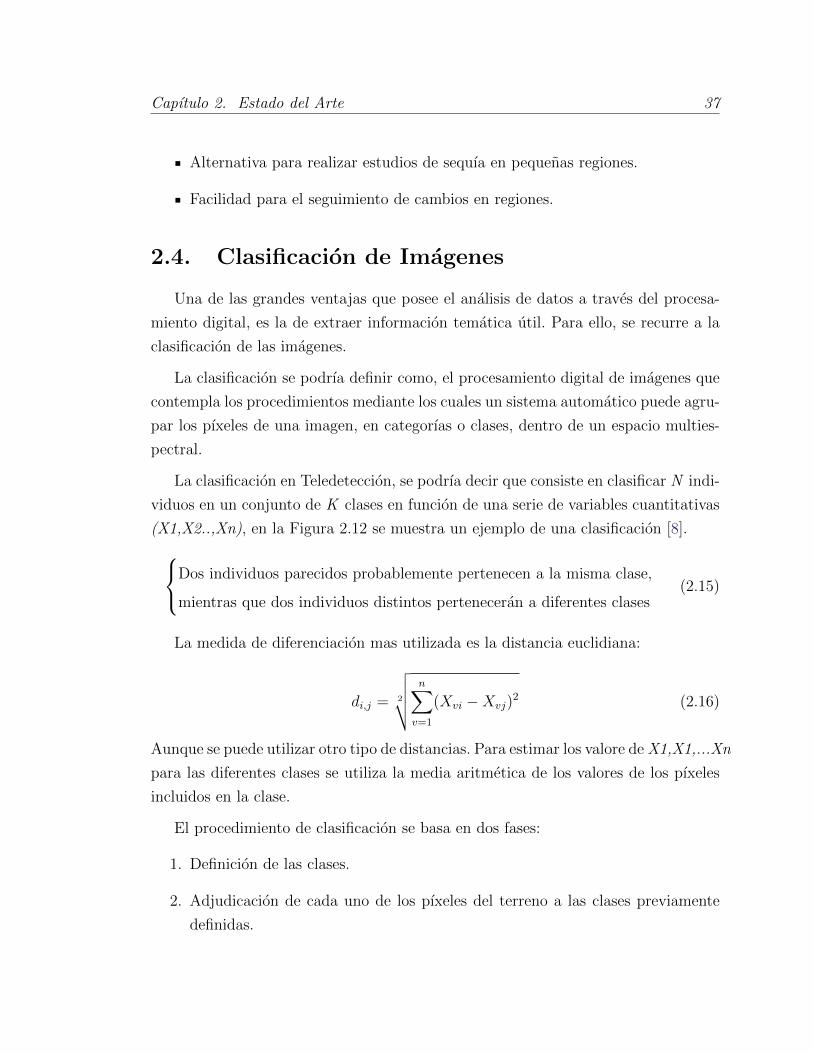
La clasificacion en Teledeteccion, se podrıa decir que consiste en clasificar N indi-
viduos en un conjunto de K clases en funcion de una serie de variables cuantitativas
(X1,X2..,Xn), en la Figura 2.12 se muestra un ejemplo de una clasificacion [8].Dos individuos parecidos probablemente pertenecen a la misma clase,
mientras que dos individuos distintos perteneceran a diferentes clases(2.15)
La medida de diferenciacion mas utilizada es la distancia euclidiana:
di,j = 2
√√√√ n∑v=1
(Xvi −Xvj)2 (2.16)
Aunque se puede utilizar otro tipo de distancias. Para estimar los valore de X1,X1,...Xn
para las diferentes clases se utiliza la media aritmetica de los valores de los pıxeles
incluidos en la clase.
El procedimiento de clasificacion se basa en dos fases:
1. Definicion de las clases.
2. Adjudicacion de cada uno de los pıxeles del terreno a las clases previamente
definidas.
Capıtulo 2. Estado del Arte 38
(a) b1 (b) b2 (c) b3
(d) b4 (e) b5 (f) b7
Figura 2.12: Clasificacion por Analisis de componentes principales (PCA) [8].
2.4.1. Definicion de Clases
Suponiendo que los datos han pasado ya todo tipo de correcciones de tipo geometri-
co o atmosferico, existen dos metodos complementarios para afrontar la definicion
de clases, estos son validos en imagenes digitales.
Clasificacion supervisada
Clasificacion no supervisada
Se suelen utilizar ambos procedimientos y son complementarios. La clasificacion
supervisada utiliza conocimiento del terreno pero, si este conocimiento no es perfecto,
pueden perderse datos que una clasificacion no supervisada podrıa detectar.
2.4.2. Clasificacion no supervisada
Este metodo se utiliza cuando no se conocen las caracterısticas del terreno, o
cobertura ((a priori)), o bien, porque las caracterısticas espectrales de la superficie no
estan bien definidas en la imagen.
Consiste en orientar al clasificador para que agrupe automaticamente los pıxeles
en distintas clases, cuyo numero hay que establecer.
Capıtulo 2. Estado del Arte 39
La ventaja que tiene, es que al no seleccionar un area de entrenamiento ((homogenea)),
el agrupamiento determina tipos ((puros)) de cobertura y por consiguiente, se obtiene
una representacion mas cercana de los agrupamientos espectrales naturales de una
zona.
La desventaja, es que pueden obtenerse agrupaciones de coberturas de las cuales,
no se conozca su significado y debido a la gran cantidad de datos que se manejan
puede ocasionar perdida de datos.
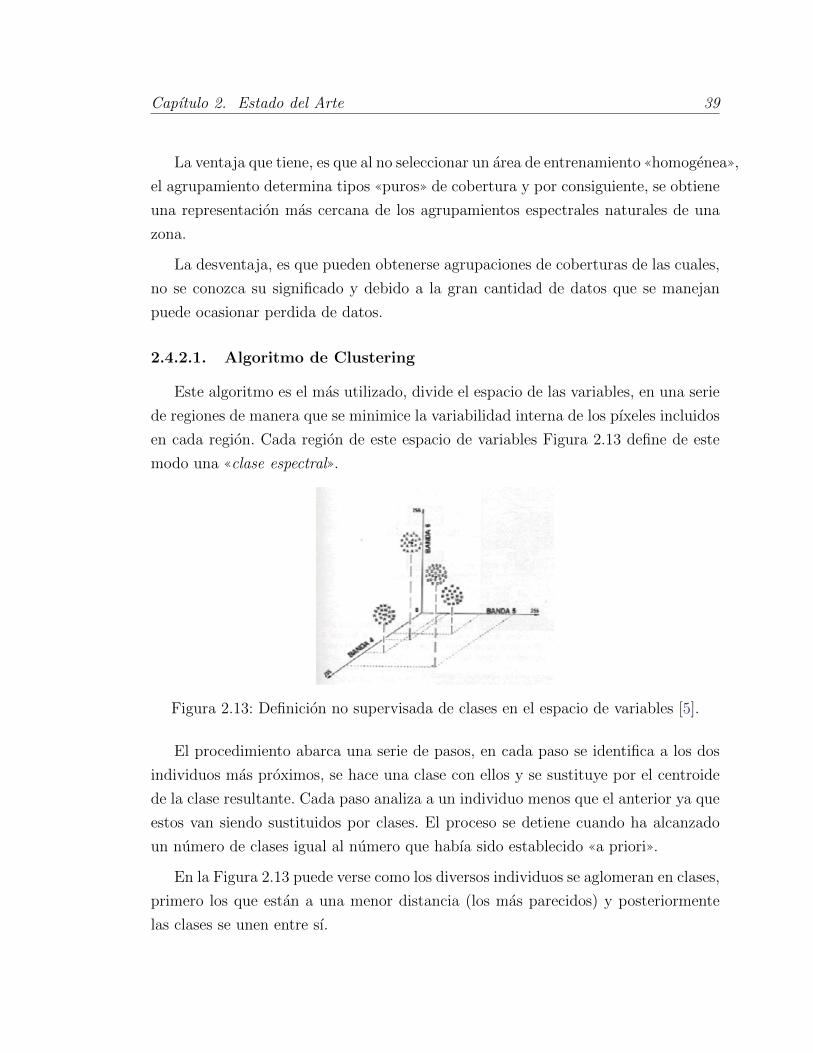
2.4.2.1. Algoritmo de Clustering
Este algoritmo es el mas utilizado, divide el espacio de las variables, en una serie
de regiones de manera que se minimice la variabilidad interna de los pıxeles incluidos
en cada region. Cada region de este espacio de variables Figura 2.13 define de este
modo una ((clase espectral)).
Figura 2.13: Definicion no supervisada de clases en el espacio de variables [5].
El procedimiento abarca una serie de pasos, en cada paso se identifica a los dos
individuos mas proximos, se hace una clase con ellos y se sustituye por el centroide
de la clase resultante. Cada paso analiza a un individuo menos que el anterior ya que
estos van siendo sustituidos por clases. El proceso se detiene cuando ha alcanzado
un numero de clases igual al numero que habıa sido establecido ((a priori)).
En la Figura 2.13 puede verse como los diversos individuos se aglomeran en clases,
primero los que estan a una menor distancia (los mas parecidos) y posteriormente
las clases se unen entre sı.
Capıtulo 2. Estado del Arte 40
Puesto que una imagen digital puede tener millones de pıxeles, se establece una
muestra con la que se inicia el proceso.
2.4.3. Clasificacion supervisada
Se seleccionan areas de las que se conoce ((a priori)) la identidad y localizacion
de algunos tipos de elementos a ser clasificados. Ejemplo: la cobertura de bosques,
vegetacion, aspectos urbanos, etc. Estas serviran para generar una firma espectral
caracterıstica de cada una de las clases, que se denominan ((clases informacionales)),
de los sitios especıficos elegidos y conocidos como ((areas de entrenamiento)), puesto
que las caracterısticas espectrales de cada uno de ellos serviran para ((entrenar)) el
algoritmo de clasificacion. En la Figura 2.14 se observa algunos tipos de clasificacion
supervisada.
2.4.4. Tipos de algoritmos de clasificacion supervisada
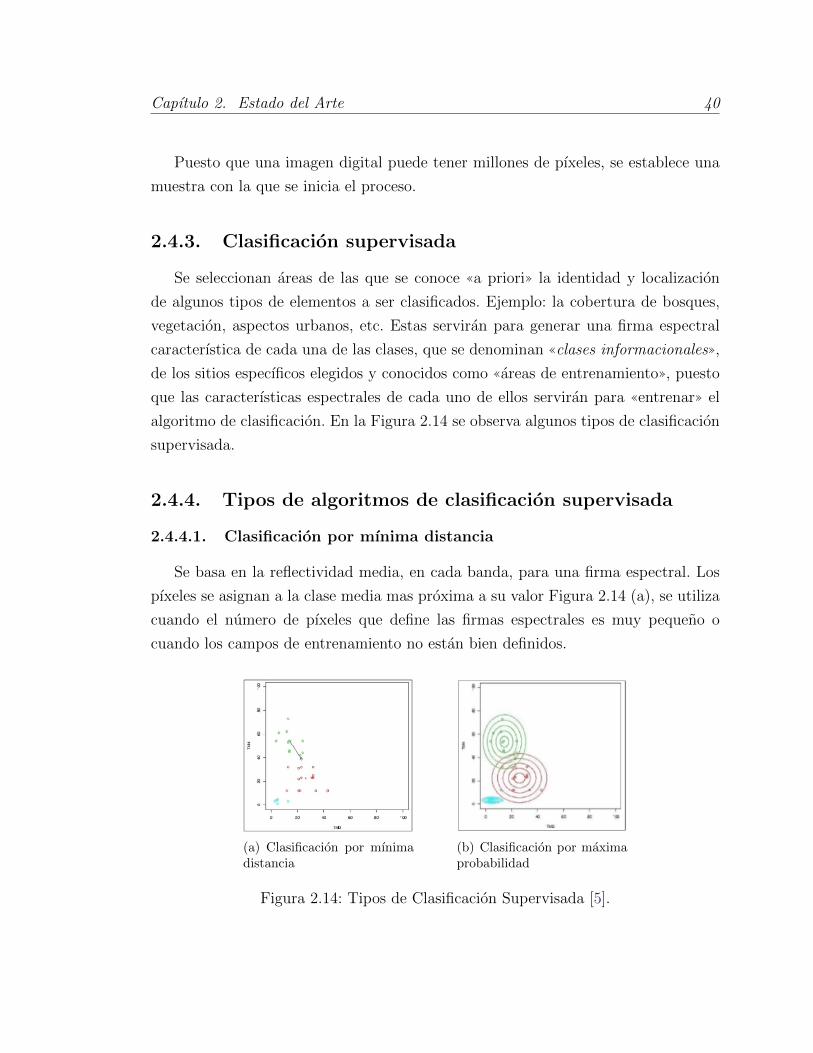
2.4.4.1. Clasificacion por mınima distancia
Se basa en la reflectividad media, en cada banda, para una firma espectral. Los
pıxeles se asignan a la clase media mas proxima a su valor Figura 2.14 (a), se utiliza
cuando el numero de pıxeles que define las firmas espectrales es muy pequeno o
cuando los campos de entrenamiento no estan bien definidos.
(a) Clasificacion por mınimadistancia
(b) Clasificacion por maximaprobabilidad
Figura 2.14: Tipos de Clasificacion Supervisada [5].

Capıtulo 2. Estado del Arte 41
2.4.4.2. Clasificacion por maxima verosimilitud
Puesto que se tiene muestras de reflectividades para cada clase y cada banda,
pueden calcularse la media y la desviacion tıpica de cada una de las clases y utilizar
algun modelo de distribucion de probabilidad. Este clasificador asume que los datos
siguen una funcion de distribucion normal para asignar la probabilidad de que un
pıxel cualquiera pertenezca a cada una de las clases Figura 2.14 (b). Permite definir
algun tipo de criterio para medir la calidad de la asignacion [5].
2.4.4.3. Arboles de clasificacion
Suponen un analisis exhaustivo de las respuestas espectrales de las clases y del
conjunto de datos disponibles, se van planteando una serie de cuestiones respecto al
pıxel a clasificar y en funcion de las respuestas se hacen otras preguntas. Consiste
en ir haciendo preguntas a cada pıxel cuya respuesta positiva o negativa conducira a
otra pregunta y ası sucesivamente hasta obtener la clase a la que pertenece.
Las cuestiones planteadas hacen referencia a los valores de reflectividad en las
diferentes bandas de modo que, desde el punto de vista geometrico, trazan lıneas
frontera entre clases. Tras pasar a traves de diferentes cuestiones respecto al pıxel,
este queda clasificado. Se basa en los mismos principios que los sistemas expertos [5].
Figura 2.15: Arbol de Clasificacion [5].

Capıtulo 2. Estado del Arte 42
En el ejemplo de la Figura 2.15 resulta evidente que la definicion de las cuestiones
que se plantean en un arbol de decision es bastante subjetiva, aun teniendo en cuenta
los valores obtenidos en las areas de entrenamiento.

Capıtulo 3
Metodologıa
3.1. Primer caso de Estudio
La presente investigacion fue realizada en dos areas de estudio, conformadas por
dos lagos que presentan en la actualidad un proceso de desecacion.
1. Lago Poopo, Bolivia
2. Lago Urmıa, Iran
3.1.1. Lago Poopo
El Lago Poopo se encuentra localizado en America del Sur ubicado en un altiplano
del Departamento de Oruro en Bolivia [17], esta dividido en tres regiones: a) la parte
oriental de la region montanosa, que ocupa aproximadamente el 40 % del total de
su cuenca; b) la region montanosa occidental que ocupa solo una pequena parte de
la cuenca y c) el area plana inter-Andina, que constituye la mitad de la cuenca del
mismo.
El lago Poopo fue un embalse de agua salada, el segundo mas grande de Bolivia
despues del lago Titicaca, esta conectado por el rıo Desaguadero que le aporta las
aguas sobrantes del Lago Titicaca. En un inicio tenıa unas dimensiones de 84 Km
de largo por 55 Km de ancho, con un area aproximadamente de 2337 Km2, a una
altitud de 3686 metros sobre el nivel del mar, a una profundidad media 2.4 m y
maxima 5 m [17].
43
Capıtulo 3. Metodologıa 44
Este se caracterizaba por tener un variado ecosistema, en el coexistıan: aves,
peces, reptiles, mamıferos, ademas de una variedad de plantas. Era un punto de
descanso para aves migratorias que se trasladaban de Norte a Sur. La poblacion que
habita en sus alrededores tenıa como medio de sustento la pesca.
En la actualidad, como los niveles del acuıfero han ido disminuyendo a lo largo
de los anos, la pesca se ha reducido notablemente y los habitantes de esta zona han
tenido que migrar a otras ciudades. Este impacto en la poblacion, causado por la
disminucion de este acuıfero ha llevado a la investigacion sobre la evolucion historica
del contenido del mismo.
A partir del ano 2015 se acelero el proceso de desertificacion del lago, por tal
razon se elige como area de estudio para el desarrollo de esta investigacion.
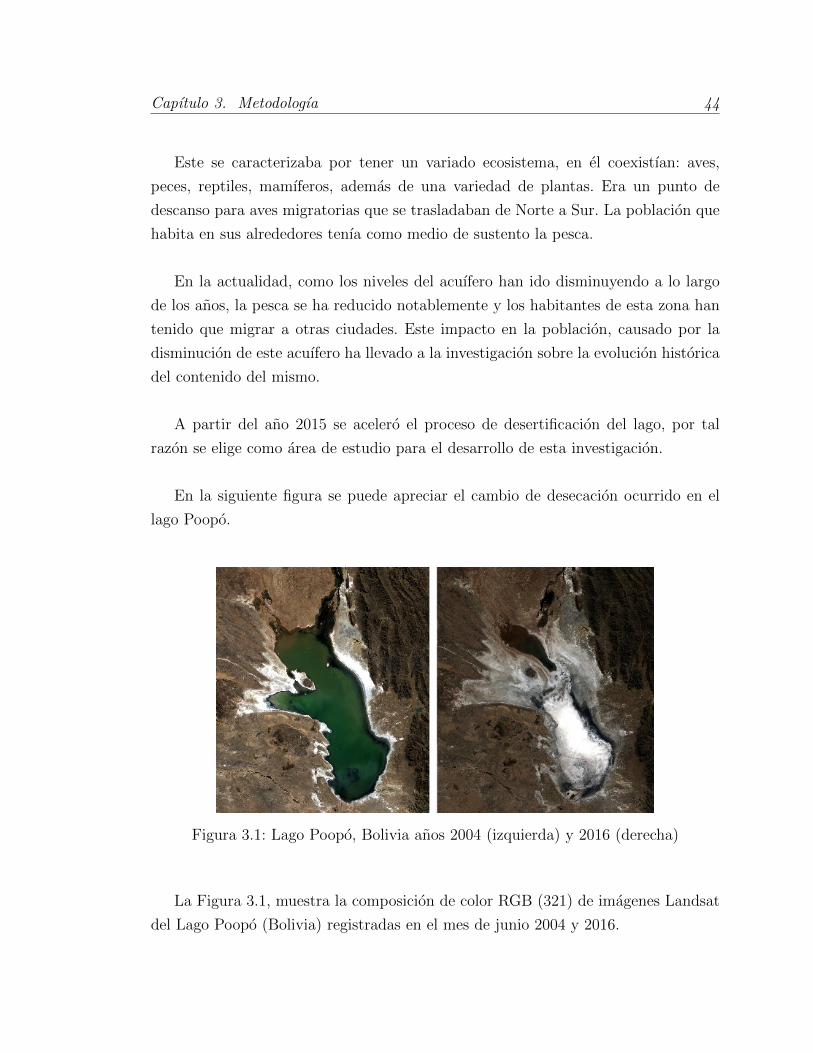
En la siguiente figura se puede apreciar el cambio de desecacion ocurrido en el
lago Poopo.
Figura 3.1: Lago Poopo, Bolivia anos 2004 (izquierda) y 2016 (derecha)
La Figura 3.1, muestra la composicion de color RGB (321) de imagenes Landsat
del Lago Poopo (Bolivia) registradas en el mes de junio 2004 y 2016.
Capıtulo 3. Metodologıa 45
3.2. Fuentes de Informacion
Las imagenes satelitales utilizadas para este estudio son las imagenes multibanda
registradas por los sensores Landsat 7-ETM+ y Landsat 8-OLI/TIRS, suministra-
das por la ((Agencia de Servicio Geologico de los Estados Unidos)) (USGS) United
States Geological Survey [18]. Es una agencia cientıfica encargada de estudiar el
terreno, los recursos naturales, y los peligros naturales que los amenazan. La agencia
se divide en 4 disciplinas cientıficas mayores: biologıa, geografıa, geologıa e hidrologıa,
su lema es: ((Ciencia para un mundo cambiante)) [18].
Los anos seleccionados para la descarga de las imagenes satelitales van desde
2004 (2004 - 2012 obtenidas a traves del Landsat 7-ETM+) a 2016 (2013 - 2016 del
Landsat 8-OLI/TIRS). Las dimensiones de las imagenes satelitales son del tamano
3889 x 3437 pıxeles, las coordenadas del centro de las imagenes son 18◦44’55” S y
66◦58’25” O. Se ha verificado el corregistro en las imagenes.
3.2.1. Diferencias entre las imagenes de Landsat 7-ETM+ y
Landsat 8 OLI/TIRS
3.2.1.1. Landsat Enhanced Thematic Mapper Plus (ETM+)
Lanzado el 15 de Abril de 1999.
Objetivo actualizar la base de datos de todo el planeta Tierra.
Transmite 532 imagenes al dıa.
Tiene una memoria solida de 378 Gigabytes.
Tiene una resolucion radiometrica de 8 bits y una resolucion espacial de 30m.
Tiene un sensor ((Enhanced Thematic Mapper Plus)) (ETM+) que escanea por
barrido.
Contiene 8 bandas espectrales que pueden ser combinadas de distintas formas
para obtener variadas composiciones de color u opciones de procesamiento.

Capıtulo 3. Metodologıa 46
Esta imagen consta de 8 bandas espectrales, con una resolucion espacial de 30
metros de la banda 1 a la 7. La resolucion de la banda 8 (pancromatica ) es de 15 me-
tros. Tambien, cuenta con mejoras en las caracterısticas geometricas y radiometricas
y una mayor resolucion espacial de 60 m de la banda termica.
3.2.1.2. Landsat 8 Operational Land Imager (OLI) and Thermal Infrared
Sensor (TIRS)
Lanzado el 11 de Febrero del 2013.
Objetivo recolectar y archivar las imagenes multiespectral de alta resolucion y
que tenga coherencia con los datos enviados de las misiones anteriores.
Transmite 700 imagenes al dıa.
Tiene una memoria solida de 3.14 Terabytes.
Tiene una resolucion radiometrica de 12 bits y una resolucion espacial de 30m.
Tiene dos sensores ((Operational Land Imager)) (OLI) - Infrarrojo Termico
(TIRS) y ambos escanean por lineas. que escanea por barrido.
Contiene 11 bandas espectrales que pueden ser combinadas de distintas formas
para obtener variadas composiciones de color u opciones de procesamiento.
Esta imagen consta de 11 bandas espectrales con una resolucion de 30 metros de
la banda 1 a la 7 y la 9. Una nueva banda 1 (Ultra-Azul) que es util para estudios
costeros y de aereosol. La nueva banda 9 es usada para deteccion de nubes. La
resolucion de la banda 8 (pancromatica) es de 15 metros. Las bandas termicas 10 y
11 son utiles para determinar con mayor precision las temperaturas sobre el terreno.
3.3. Estudio de Precipitaciones
Para el desarrollo de esta seccion se realiza un analisis previo durante el periodo
de tiempo en el area de estudio seleccionado, con los datos de las precipitaciones y
Capıtulo 3. Metodologıa 47
temperaturas proporcionados por las estaciones climatologicas a traves de los boleti-
nes oficiales del pronostico del clima, que ofrece (SENAMHI) [19] del Departamento
de Oruro, zona donde se encuentra ubicado el Lago Poopo.
Con estos datos registrados diariamente y descargados desde el portal web del
SENAMHI, se ha procedido a realizar los calculos de valores promedios mensuales
de las temperaturas y precipitaciones entre los rangos de anos comprendidos des-
de el 2004 al 2016. Para posteriormente disenar los Climogramas que representan
graficamente esta comparativa de datos, con el objetivo de analizar las condiciones
climaticas del lago de la zona del departamento de Oruro donde se encuentra locali-
zado el mismo y confirmar cuales son los meses que comprende la estacion de lluvias
y la temporada seca, con el proposito de buscar un mes que no se vea reflejado por
estas dos estaciones extremas .
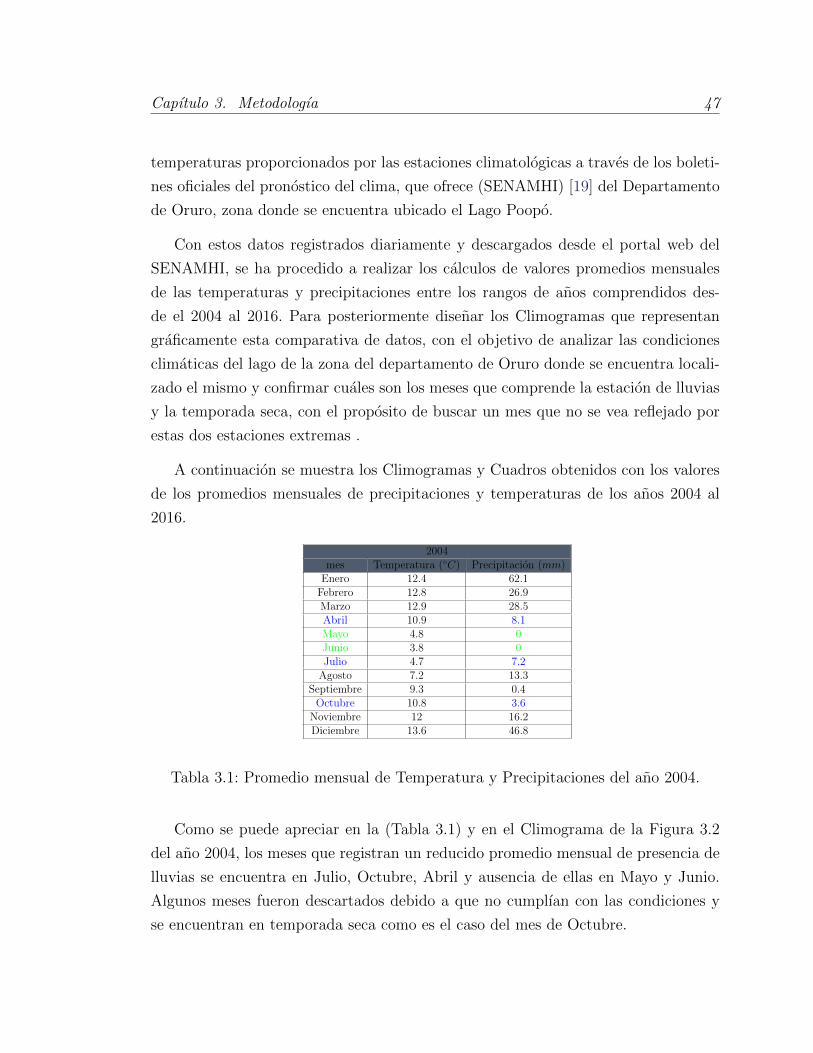
A continuacion se muestra los Climogramas y Cuadros obtenidos con los valores
de los promedios mensuales de precipitaciones y temperaturas de los anos 2004 al
2016.
2004mes Temperatura (◦C) Precipitacion (mm)
Enero 12.4 62.1Febrero 12.8 26.9Marzo 12.9 28.5Abril 10.9 8.1Mayo 4.8 0Junio 3.8 0Julio 4.7 7.2
Agosto 7.2 13.3Septiembre 9.3 0.4
Octubre 10.8 3.6Noviembre 12 16.2Diciembre 13.6 46.8
Tabla 3.1: Promedio mensual de Temperatura y Precipitaciones del ano 2004.
Como se puede apreciar en la (Tabla 3.1) y en el Climograma de la Figura 3.2
del ano 2004, los meses que registran un reducido promedio mensual de presencia de
lluvias se encuentra en Julio, Octubre, Abril y ausencia de ellas en Mayo y Junio.
Algunos meses fueron descartados debido a que no cumplıan con las condiciones y
se encuentran en temporada seca como es el caso del mes de Octubre.
Capıtulo 3. Metodologıa 48
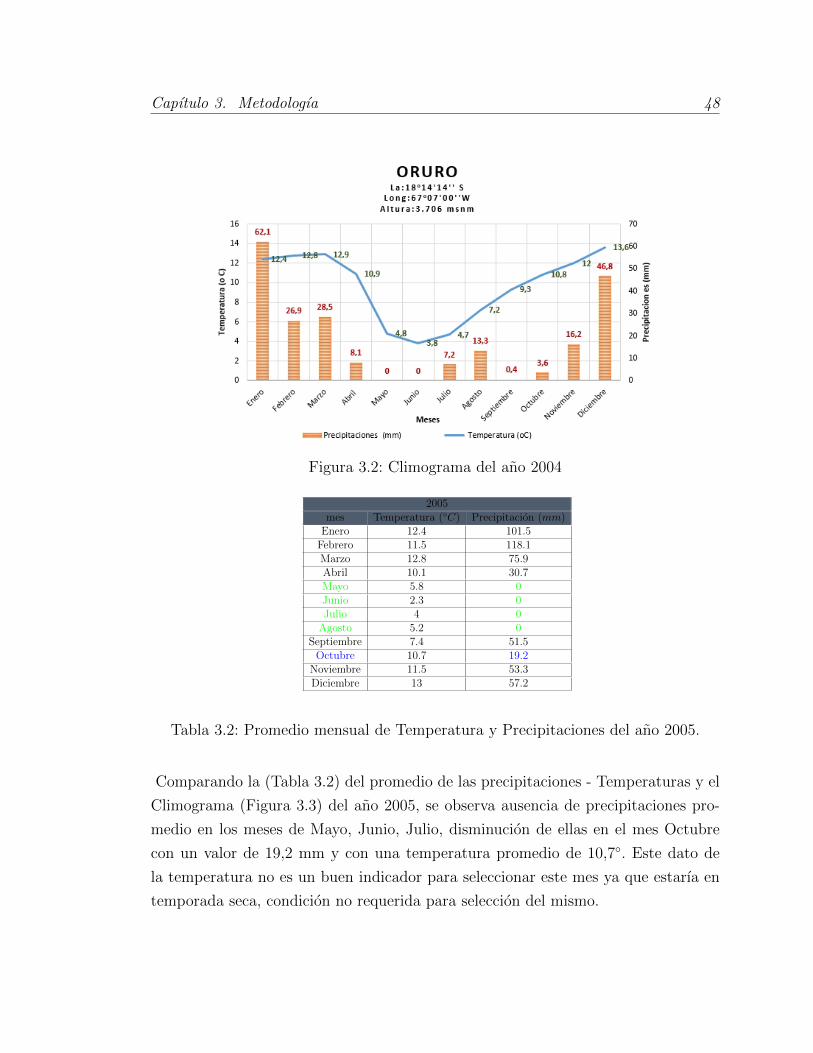
Figura 3.2: Climograma del ano 2004
2005mes Temperatura (◦C) Precipitacion (mm)
Enero 12.4 101.5Febrero 11.5 118.1Marzo 12.8 75.9Abril 10.1 30.7Mayo 5.8 0Junio 2.3 0Julio 4 0
Agosto 5.2 0Septiembre 7.4 51.5
Octubre 10.7 19.2Noviembre 11.5 53.3Diciembre 13 57.2
Tabla 3.2: Promedio mensual de Temperatura y Precipitaciones del ano 2005.
Comparando la (Tabla 3.2) del promedio de las precipitaciones - Temperaturas y el
Climograma (Figura 3.3) del ano 2005, se observa ausencia de precipitaciones pro-
medio en los meses de Mayo, Junio, Julio, disminucion de ellas en el mes Octubre
con un valor de 19,2 mm y con una temperatura promedio de 10,7◦. Este dato de
la temperatura no es un buen indicador para seleccionar este mes ya que estarıa en
temporada seca, condicion no requerida para seleccion del mismo.
Capıtulo 3. Metodologıa 49
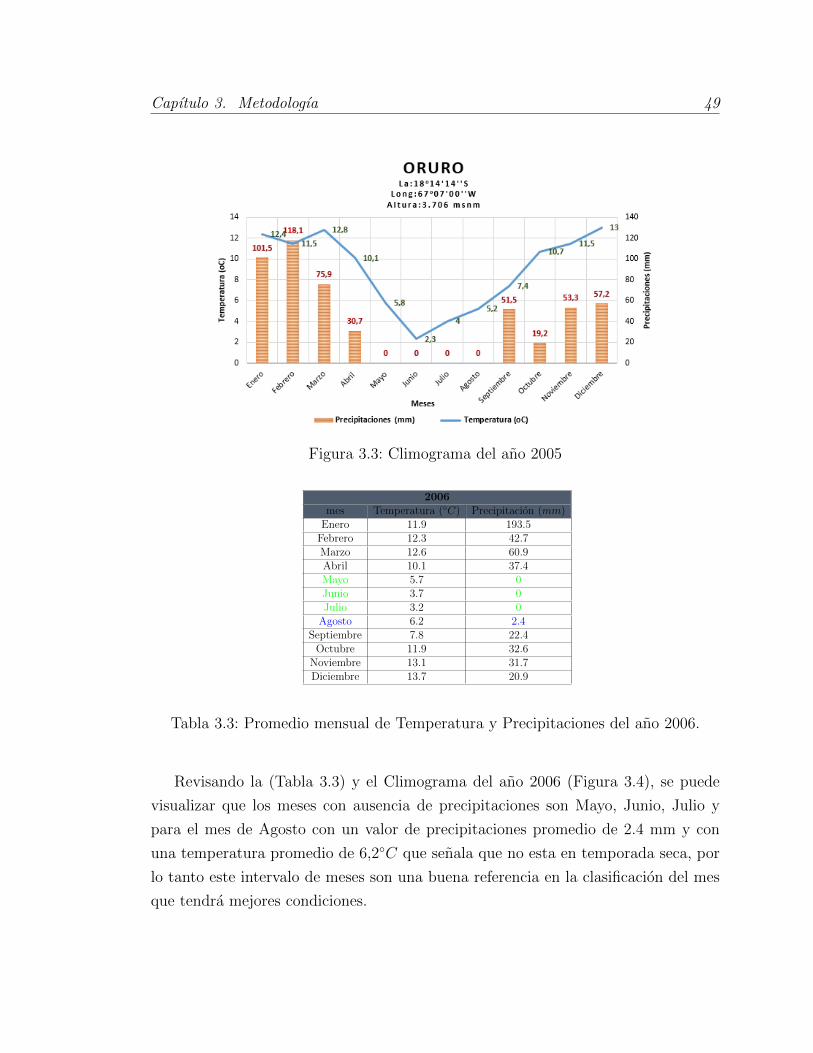
Figura 3.3: Climograma del ano 2005
2006mes Temperatura (◦C) Precipitacion (mm)
Enero 11.9 193.5Febrero 12.3 42.7Marzo 12.6 60.9Abril 10.1 37.4Mayo 5.7 0Junio 3.7 0Julio 3.2 0
Agosto 6.2 2.4Septiembre 7.8 22.4
Octubre 11.9 32.6Noviembre 13.1 31.7Diciembre 13.7 20.9
Tabla 3.3: Promedio mensual de Temperatura y Precipitaciones del ano 2006.
Revisando la (Tabla 3.3) y el Climograma del ano 2006 (Figura 3.4), se puede
visualizar que los meses con ausencia de precipitaciones son Mayo, Junio, Julio y
para el mes de Agosto con un valor de precipitaciones promedio de 2.4 mm y con
una temperatura promedio de 6,2◦C que senala que no esta en temporada seca, por
lo tanto este intervalo de meses son una buena referencia en la clasificacion del mes
que tendra mejores condiciones.
Capıtulo 3. Metodologıa 50
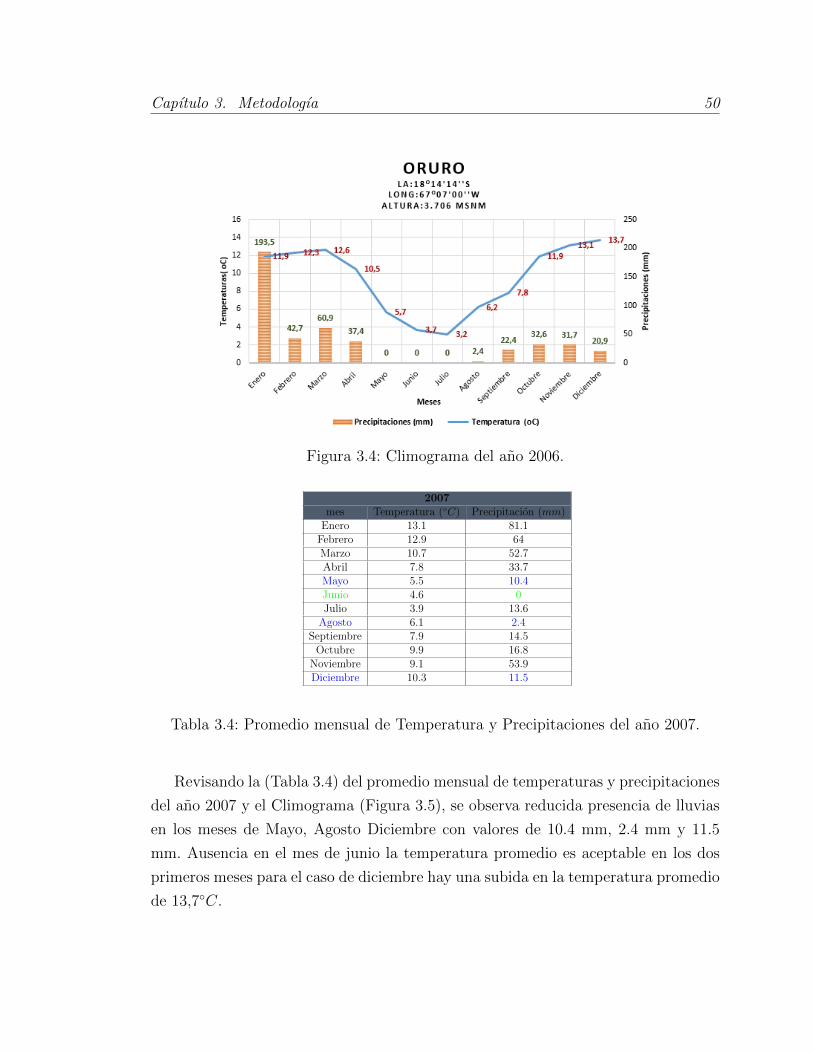
Figura 3.4: Climograma del ano 2006.
2007mes Temperatura (◦C) Precipitacion (mm)
Enero 13.1 81.1Febrero 12.9 64Marzo 10.7 52.7Abril 7.8 33.7Mayo 5.5 10.4Junio 4.6 0Julio 3.9 13.6
Agosto 6.1 2.4Septiembre 7.9 14.5
Octubre 9.9 16.8Noviembre 9.1 53.9Diciembre 10.3 11.5
Tabla 3.4: Promedio mensual de Temperatura y Precipitaciones del ano 2007.
Revisando la (Tabla 3.4) del promedio mensual de temperaturas y precipitaciones
del ano 2007 y el Climograma (Figura 3.5), se observa reducida presencia de lluvias
en los meses de Mayo, Agosto Diciembre con valores de 10.4 mm, 2.4 mm y 11.5
mm. Ausencia en el mes de junio la temperatura promedio es aceptable en los dos
primeros meses para el caso de diciembre hay una subida en la temperatura promedio
de 13,7◦C.
Capıtulo 3. Metodologıa 51
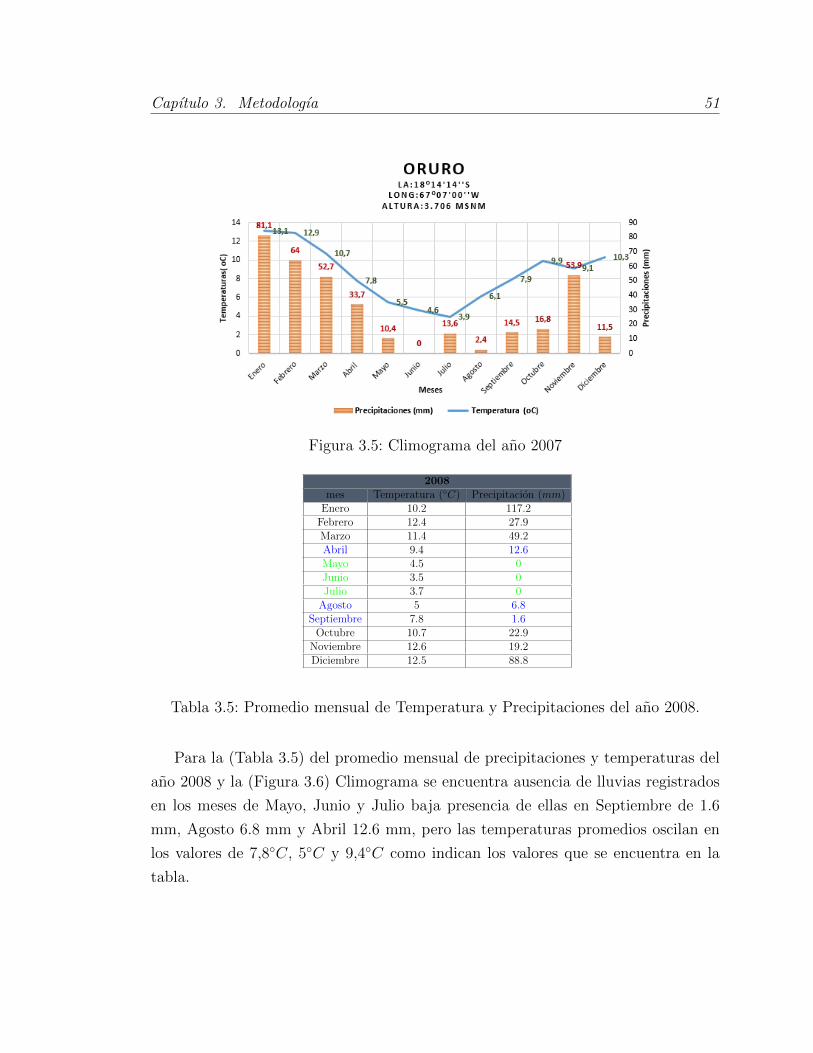
Figura 3.5: Climograma del ano 2007
2008mes Temperatura (◦C) Precipitacion (mm)
Enero 10.2 117.2Febrero 12.4 27.9Marzo 11.4 49.2Abril 9.4 12.6Mayo 4.5 0Junio 3.5 0Julio 3.7 0
Agosto 5 6.8Septiembre 7.8 1.6
Octubre 10.7 22.9Noviembre 12.6 19.2Diciembre 12.5 88.8
Tabla 3.5: Promedio mensual de Temperatura y Precipitaciones del ano 2008.
Para la (Tabla 3.5) del promedio mensual de precipitaciones y temperaturas del
ano 2008 y la (Figura 3.6) Climograma se encuentra ausencia de lluvias registrados
en los meses de Mayo, Junio y Julio baja presencia de ellas en Septiembre de 1.6
mm, Agosto 6.8 mm y Abril 12.6 mm, pero las temperaturas promedios oscilan en
los valores de 7,8◦C, 5◦C y 9,4◦C como indican los valores que se encuentra en la
tabla.
Capıtulo 3. Metodologıa 52
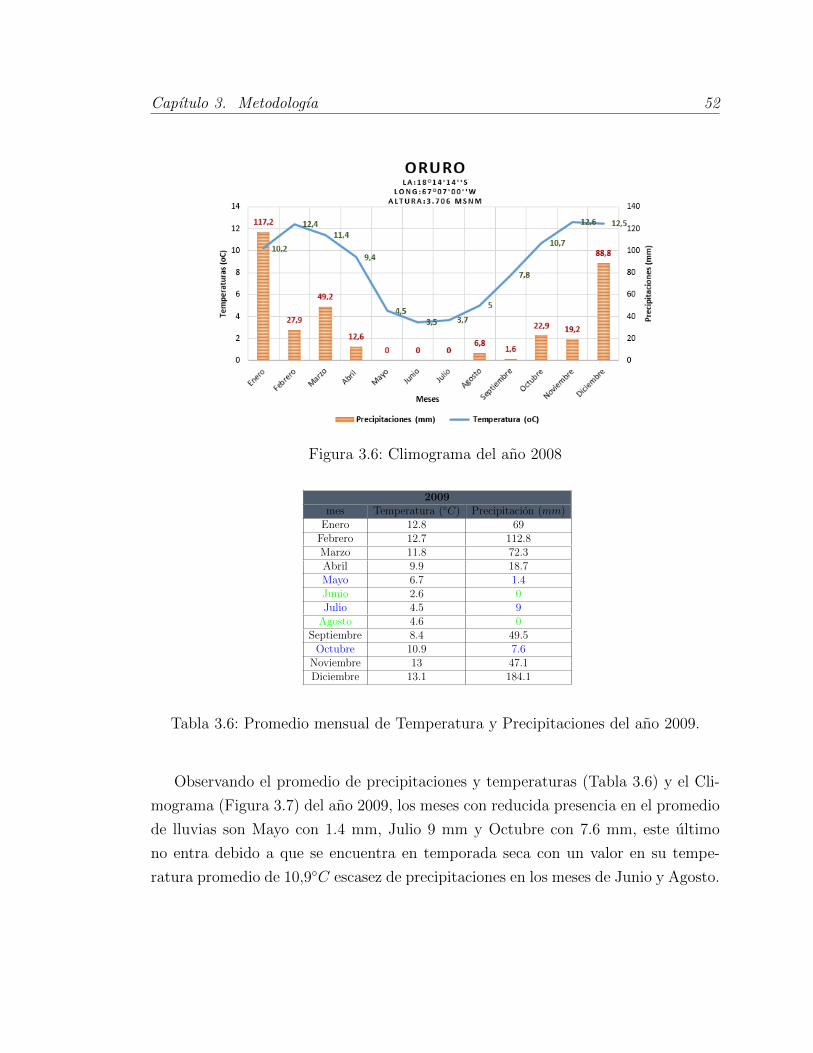
Figura 3.6: Climograma del ano 2008
2009mes Temperatura (◦C) Precipitacion (mm)
Enero 12.8 69Febrero 12.7 112.8Marzo 11.8 72.3Abril 9.9 18.7Mayo 6.7 1.4Junio 2.6 0Julio 4.5 9
Agosto 4.6 0Septiembre 8.4 49.5
Octubre 10.9 7.6Noviembre 13 47.1Diciembre 13.1 184.1
Tabla 3.6: Promedio mensual de Temperatura y Precipitaciones del ano 2009.
Observando el promedio de precipitaciones y temperaturas (Tabla 3.6) y el Cli-
mograma (Figura 3.7) del ano 2009, los meses con reducida presencia en el promedio
de lluvias son Mayo con 1.4 mm, Julio 9 mm y Octubre con 7.6 mm, este ultimo
no entra debido a que se encuentra en temporada seca con un valor en su tempe-
ratura promedio de 10,9◦C escasez de precipitaciones en los meses de Junio y Agosto.

Capıtulo 3. Metodologıa 53
Figura 3.7: Climograma del ano 2009.
2010mes Temperatura (◦C) Precipitacion (mm)
Enero 13.4 142.1Febrero 13.9 101.6Marzo 13.1 45.4Abril 10.9 30.7Mayo 7.6 15.6Junio 6.2 0Julio 4.3 3.1
Agosto 6.6 11.8Septiembre 9.2 25.2
Octubre 10.4 30.4Noviembre 11.8 2.6Diciembre 13.9 13.2
Tabla 3.7: Promedio mensual de Temperatura y Precipitaciones del ano 2010.
En el ano 2010 tanto en la (Tabla 3.7) del promedio de precipitaciones y tem-
peraturas y el Climograma de la (Figura 3.8), se puede observar que en el mes de
Junio presenta ausencia en el valor promedio de precipitaciones, los meses con baja
intensidad de lluvias se encuentran en los meses de Noviembre con 2.6 mm y Julio
con 3.1 mm.

Capıtulo 3. Metodologıa 54
Figura 3.8: Climograma del ano 2010.
2011mes Temperatura (◦C) Precipitacion (mm)
Enero 13.4 31.4Febrero 11.6 168.5Marzo 11.6 74.8Abril 9.4 23Mayo 7.1 5.2Junio 5.7 0Julio -1.6 4.2
Agosto 5.1 3.2Septiembre 8.6 9.2
Octubre 10.1 2.8Noviembre 11.1 11.3Diciembre 9.1 154.7
Tabla 3.8: Promedio mensual de Temperatura y Precipitaciones del ano 2011.
Revisando los valores registrados en la (Tabla 3.8) del promedio de temperaturas
y precipitaciones con el Climograma de la (Figura 3.9) del ano 2011, indica que el
mes de Julio no hubo presencia de lluvias, los meses de Agosto y Octubre registran
valores de 3.2 mm y 2.8 mm en el promedio mensual de precipitaciones. El mes de
octubre se encontrarıa en temporada seca con un dato de (10,1◦C) en su temperatura
promedio mensual.
Capıtulo 3. Metodologıa 55
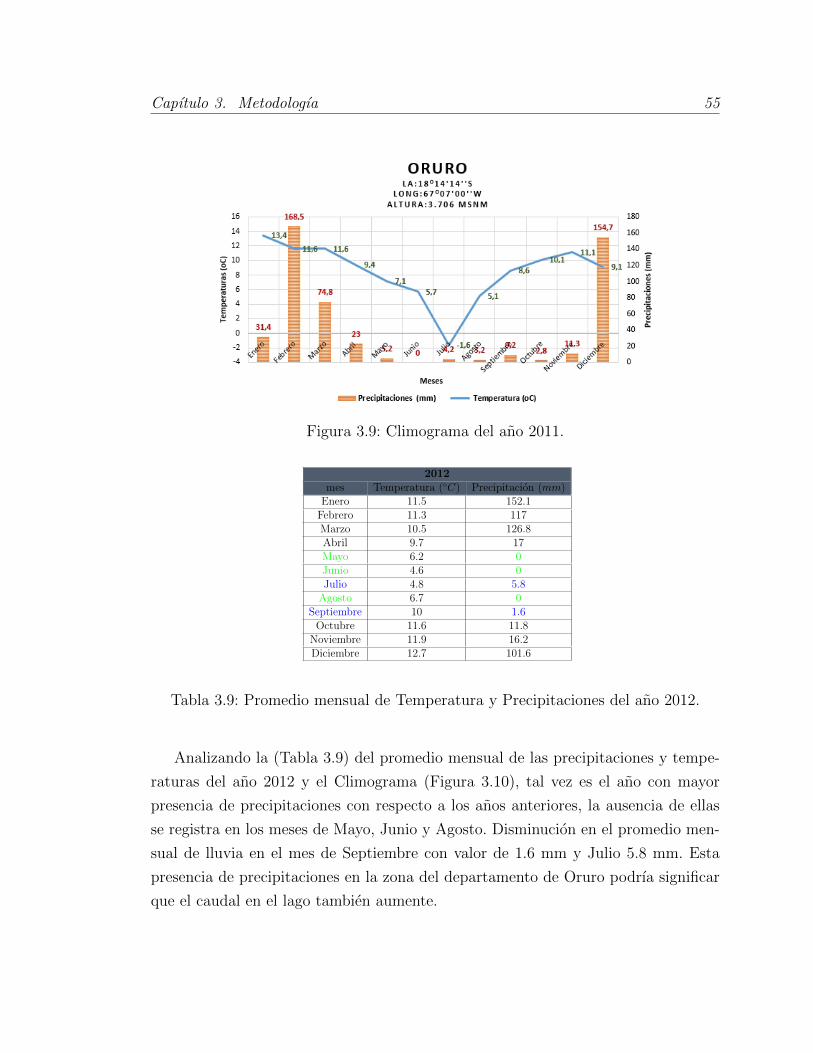
Figura 3.9: Climograma del ano 2011.
2012mes Temperatura (◦C) Precipitacion (mm)
Enero 11.5 152.1Febrero 11.3 117Marzo 10.5 126.8Abril 9.7 17Mayo 6.2 0Junio 4.6 0Julio 4.8 5.8
Agosto 6.7 0Septiembre 10 1.6
Octubre 11.6 11.8Noviembre 11.9 16.2Diciembre 12.7 101.6
Tabla 3.9: Promedio mensual de Temperatura y Precipitaciones del ano 2012.
Analizando la (Tabla 3.9) del promedio mensual de las precipitaciones y tempe-
raturas del ano 2012 y el Climograma (Figura 3.10), tal vez es el ano con mayor
presencia de precipitaciones con respecto a los anos anteriores, la ausencia de ellas
se registra en los meses de Mayo, Junio y Agosto. Disminucion en el promedio men-
sual de lluvia en el mes de Septiembre con valor de 1.6 mm y Julio 5.8 mm. Esta
presencia de precipitaciones en la zona del departamento de Oruro podrıa significar
que el caudal en el lago tambien aumente.

Capıtulo 3. Metodologıa 56
Figura 3.10: Climograma del ano 2012.
2013mes Temperatura (◦C) Precipitacion (mm)
Enero 12.3 108.6Febrero 12.5 113.3Marzo 12.6 22Abril 9.4 2.2Mayo 8 8.7Junio 5.1 55.1Julio 6.2 3.8
Agosto 6.6 38.5Septiembre 9 5.8
Octubre 11.3 37Noviembre 13.4 30.2Diciembre 12.7 187.5
Tabla 3.10: Promedio mensual de Temperatura y Precipitaciones del ano 2013.
En el ano 2013 en el Promedio mensual de precipitaciones y temperaturas (Tabla
3.10) y el Climograma (Figura 3.11), no registra ausencia de lluvias en ningun mes
del ano, se podrıa decir que fue una epoca con una buena temporada de precipita-
ciones, los meses que registra menor presencia son los meses de Abril con 2.2 mm,
Julio con 3.8 mm y Septiembre con 5.8 mm.
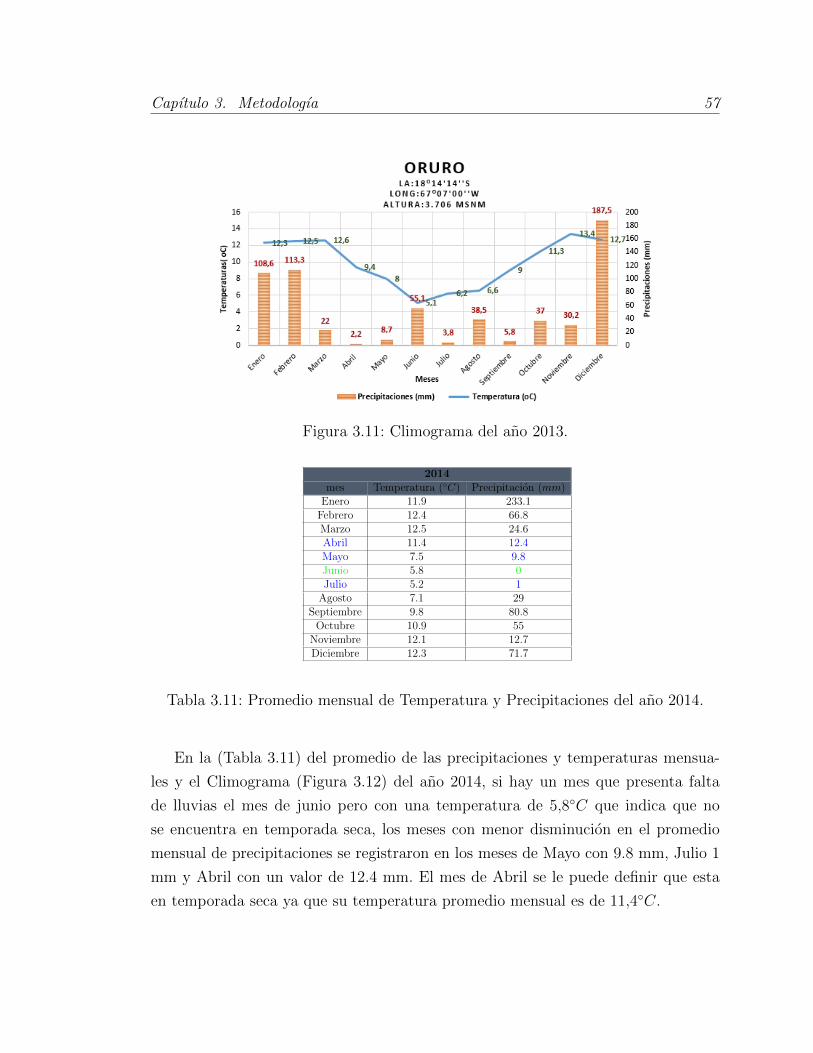
Capıtulo 3. Metodologıa 57
Figura 3.11: Climograma del ano 2013.
2014mes Temperatura (◦C) Precipitacion (mm)
Enero 11.9 233.1Febrero 12.4 66.8Marzo 12.5 24.6Abril 11.4 12.4Mayo 7.5 9.8Junio 5.8 0Julio 5.2 1
Agosto 7.1 29Septiembre 9.8 80.8
Octubre 10.9 55Noviembre 12.1 12.7Diciembre 12.3 71.7
Tabla 3.11: Promedio mensual de Temperatura y Precipitaciones del ano 2014.
En la (Tabla 3.11) del promedio de las precipitaciones y temperaturas mensua-
les y el Climograma (Figura 3.12) del ano 2014, si hay un mes que presenta falta
de lluvias el mes de junio pero con una temperatura de 5,8◦C que indica que no
se encuentra en temporada seca, los meses con menor disminucion en el promedio
mensual de precipitaciones se registraron en los meses de Mayo con 9.8 mm, Julio 1
mm y Abril con un valor de 12.4 mm. El mes de Abril se le puede definir que esta
en temporada seca ya que su temperatura promedio mensual es de 11,4◦C.
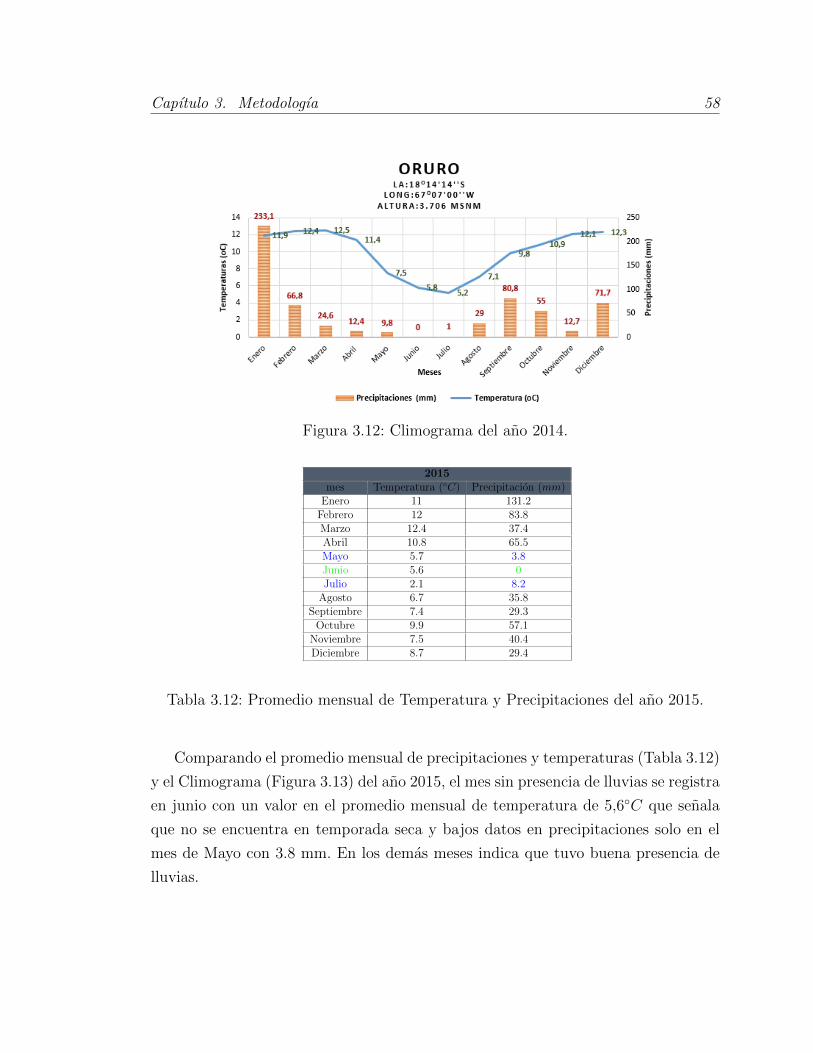
Capıtulo 3. Metodologıa 58
Figura 3.12: Climograma del ano 2014.
2015mes Temperatura (◦C) Precipitacion (mm)
Enero 11 131.2Febrero 12 83.8Marzo 12.4 37.4Abril 10.8 65.5Mayo 5.7 3.8Junio 5.6 0Julio 2.1 8.2
Agosto 6.7 35.8Septiembre 7.4 29.3
Octubre 9.9 57.1Noviembre 7.5 40.4Diciembre 8.7 29.4
Tabla 3.12: Promedio mensual de Temperatura y Precipitaciones del ano 2015.
Comparando el promedio mensual de precipitaciones y temperaturas (Tabla 3.12)
y el Climograma (Figura 3.13) del ano 2015, el mes sin presencia de lluvias se registra
en junio con un valor en el promedio mensual de temperatura de 5,6◦C que senala
que no se encuentra en temporada seca y bajos datos en precipitaciones solo en el
mes de Mayo con 3.8 mm. En los demas meses indica que tuvo buena presencia de
lluvias.
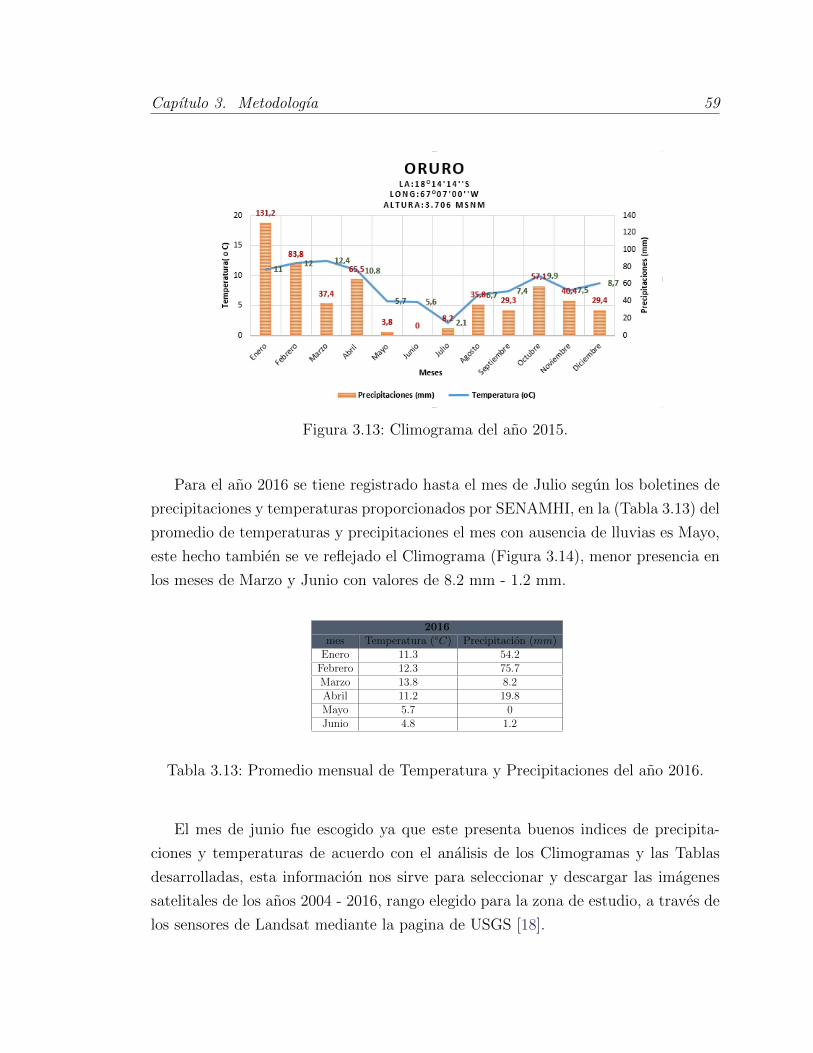
Capıtulo 3. Metodologıa 59
Figura 3.13: Climograma del ano 2015.
Para el ano 2016 se tiene registrado hasta el mes de Julio segun los boletines de
precipitaciones y temperaturas proporcionados por SENAMHI, en la (Tabla 3.13) del
promedio de temperaturas y precipitaciones el mes con ausencia de lluvias es Mayo,
este hecho tambien se ve reflejado el Climograma (Figura 3.14), menor presencia en
los meses de Marzo y Junio con valores de 8.2 mm - 1.2 mm.
2016mes Temperatura (◦C) Precipitacion (mm)
Enero 11.3 54.2Febrero 12.3 75.7Marzo 13.8 8.2Abril 11.2 19.8Mayo 5.7 0Junio 4.8 1.2
Tabla 3.13: Promedio mensual de Temperatura y Precipitaciones del ano 2016.
El mes de junio fue escogido ya que este presenta buenos indices de precipita-
ciones y temperaturas de acuerdo con el analisis de los Climogramas y las Tablas
desarrolladas, esta informacion nos sirve para seleccionar y descargar las imagenes
satelitales de los anos 2004 - 2016, rango elegido para la zona de estudio, a traves de
los sensores de Landsat mediante la pagina de USGS [18].

Capıtulo 3. Metodologıa 60
Figura 3.14: Climograma del ano 2016.
3.3.1. Promedio Anual de Temperaturas y Precipitaciones
Los Climogramas disenados muestran en forma grafica y sintetica con valores
promedios, como varıan las precipitaciones y temperaturas a lo largo del ano en el
departamento de Oruro, zona donde se encuentra ubicado el Lago Poopo.
Tambien pueden ser utiles para determinar tanto el tipo de clima como cuales
anos con mayores precipitaciones en la region, para lo cual se les va aplicado las
siguientes formulas que se detallan a continuacion:
Total de precipitaciones anuales:
�
�
�
Donde: Pp(E) +Pp(F ) +Pp(M) + ...+Pp(D) =valores medios de
las precipitaciones mensuales
Tpa = Pp(E) + Pp(F ) + Pp(M) + ...+ Pp(D) (3.1)
Promedio anual de precipitaciones:

Capıtulo 3. Metodologıa 61
�
�
�
�
Donde: P1+P2+P3+ ...+Pn =valores medios de las precipitaciones
mensuales
n= cantidad de anos meses
P = [P1 + P2 + P3 + ...+ Pn]/n (3.2)
Temperatura media anual:�
�
�
�Donde: T a =valores medios de las temperaturas mensuales
Tma = [T a(E) + T a(F ) + T a(M) + ...+ T a(D)]/12 (3.3)
Con el calculo del promedio anual de precipitaciones y el de temperatura media
anual, se han disenado los Climogramas para los diferentes anos comprendidos en el
rango del 2004 al 2016, la representacion simultanea de las temperaturas y precipi-
taciones recogidas de las estaciones meteorologicas, en cada mes del ano se presenta
de las siguiente forma, las precipitaciones totales del mes (barras) y la temperatura
media mensual (lınea).
A continuacion se muestra la (Tabla 3.14) con los anos y los promedios anuales
de precipitaciones y temperaturas medias registrados en el Departamento de Oruro.
2004 - 2016Ano Temperatura media anual (◦C) Promedio anual de precipitaciones anuales (mm)
2004 12.3 31.42005 11.7 81.22006 11.8 83.62007 11.3 57.92008 10.9 51.72009 11.8 68.22010 12.8 802011 11.5 742012 10.8 1032013 11.7 61.52014 12.05 842015 11.55 79.52016 9.9 26.51
Tabla 3.14: Temperatura y Precipitaciones del ano 2004-2016.
Analizando la (Tabla 3.14) en los diferentes anos se puede observar que el ano
2012, registra mayor presencia en el promedio de precipitaciones anuales con un valor
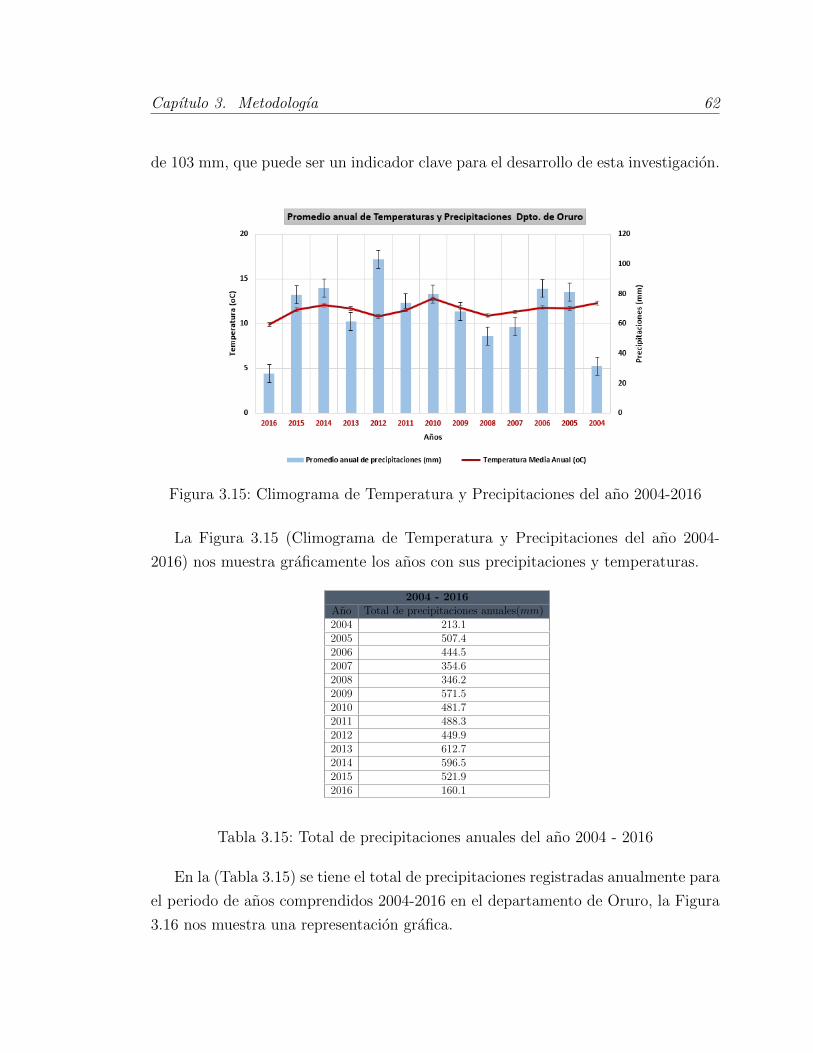
Capıtulo 3. Metodologıa 62
de 103 mm, que puede ser un indicador clave para el desarrollo de esta investigacion.
Figura 3.15: Climograma de Temperatura y Precipitaciones del ano 2004-2016
La Figura 3.15 (Climograma de Temperatura y Precipitaciones del ano 2004-
2016) nos muestra graficamente los anos con sus precipitaciones y temperaturas.
2004 - 2016Ano Total de precipitaciones anuales(mm)2004 213.12005 507.42006 444.52007 354.62008 346.22009 571.52010 481.72011 488.32012 449.92013 612.72014 596.52015 521.92016 160.1
Tabla 3.15: Total de precipitaciones anuales del ano 2004 - 2016
En la (Tabla 3.15) se tiene el total de precipitaciones registradas anualmente para
el periodo de anos comprendidos 2004-2016 en el departamento de Oruro, la Figura
3.16 nos muestra una representacion grafica.
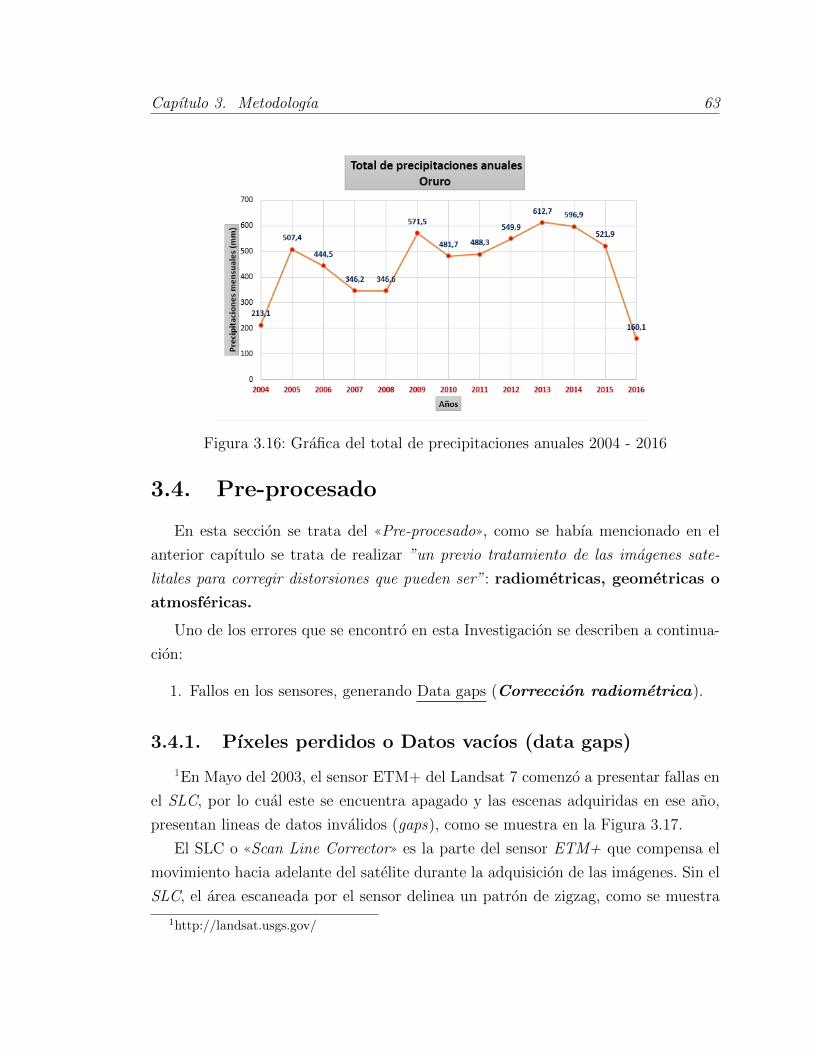
Capıtulo 3. Metodologıa 63
Figura 3.16: Grafica del total de precipitaciones anuales 2004 - 2016
3.4. Pre-procesado
En esta seccion se trata del ((Pre-procesado)), como se habıa mencionado en el
anterior capıtulo se trata de realizar ”un previo tratamiento de las imagenes sate-
litales para corregir distorsiones que pueden ser”: radiometricas, geometricas o
atmosfericas.
Uno de los errores que se encontro en esta Investigacion se describen a continua-
cion:
1. Fallos en los sensores, generando Data gaps (Correccion radiometrica).
3.4.1. Pıxeles perdidos o Datos vacıos (data gaps)
1En Mayo del 2003, el sensor ETM+ del Landsat 7 comenzo a presentar fallas en
el SLC, por lo cual este se encuentra apagado y las escenas adquiridas en ese ano,
presentan lineas de datos invalidos (gaps), como se muestra en la Figura 3.17.
El SLC o ((Scan Line Corrector)) es la parte del sensor ETM+ que compensa el
movimiento hacia adelante del satelite durante la adquisicion de las imagenes. Sin el
SLC, el area escaneada por el sensor delinea un patron de zigzag, como se muestra
1http://landsat.usgs.gov/

Capıtulo 3. Metodologıa 64
(a) Imagen con gaps (b) Fragmento de imagengaps
Figura 3.17: Gaps producidos por el SLC-off [18].
en la Figura 3.18, causando que la parte de los datos registrados esten duplicados
y la parte correspondiente al terreno bajo el satelite no sea registrada en absoluto
quedando regiones duplicadas y las no registradas de la imagen con el valor 0. Esto
significa que dichas imagenes contienen datos reales intercalados con franjas negras
(el equivalente el valor 0 en todos los canales).
(a) SLC (b) SLC1
Figura 3.18: Camino del escaner ETM+ con y sin el SLC, tomada del sitio de laUSGS Landsat Projects SLC-off [20].
Los gaps provocan aproximadamente, la perdida de un 22 % de la informacion
de cada imagen. Estan dispuestos en franjas inclinadas hacia la izquierda unos 8o
respecto a la orientacion horizontal debido a la rotacion de la imagen y aparecen
en intervalos de 33 pıxeles. Estas franjas tienen hasta 15 pıxeles en el borde de la
imagen y van disminuyendo gradualmente camino al centro hasta desaparecer, segun
la USGS[20].

Capıtulo 3. Metodologıa 65
3.4.1.1. Metodologıa
Para rellenar los gaps provocados por el problema del SLC-off en las image-
nes, es necesario procesar cada una de las ((ocho bandas, en escala de grises, que la
componen)), de forma independiente.
El algoritmo seleccionado, recibe como entrada dos escenas correspondientes a
una misma banda de las imagenes a corregir, primaria y secundaria (o de relleno),
y devuelve una escena cuyos datos validos seran los mismos de la escena primaria
unidos a los gaps que se hayan podido rellenar, como muestra la Figura 3.19. Para
ello, se empleo la siguiente metodologıa:
1. Preparar las escenas de trabajo utilizando el programa de procesamiento de
imagenes 2 ENVI, para pasarlas como una entrada correcta al algoritmo selec-
cionado.
2. Implementar un algoritmo de relleno utilizando el Phase 2 Gap-Fill Algorithm
Para que el algoritmo sea efectivo, las escenas de entrada deben de cumplir dos
condiciones fundamentales.
a) Deben tener el mismo tamano en cuanto a filas x columnas y la misma localizacion
geografica.
b) Deben estar libres de nubes y sombras.
3.4.1.2. Algoritmo
En la descripcion del algoritmo no se modifica el Phase 2 Gap-Fill Algorithm,
propuesto por la 3 USGS.
1. Buscar los pıxeles comunes denotado por primeDN y fillDN
2http://www.esri.es/3http://landsat.usgs.gov/

Capıtulo 3. Metodologıa 66
2. Construir la funcion de regresion lineal asociada al problema1 fillDN1
1 fillDN2
......
1 fillDNN
[bias
gains
]=
primeDN1
primeDN2
...
primeDNN
(3.4)
3. Calcular los coeficientes por el Metodo de los Mınimos Cuadrados Ordinario:
[bias
gains
]=
[N
∑Ni=1 fillDNi∑N
i=1 fillDNi
∑Ni=1(fillDNi)
2
]−1 [ ∑Ni=1 primeDNi∑N
i=1(fillDNi)(primeDNi)
](3.5)
haciendo f=fillDN y p=primeDN, se obtiene
bias =
∑Ni=1 f
2i
∑Ni=1 pi −
∑Ni=1 fi
∑Ni=1(fi ∗ pi)∑N
i=1(fi)2 − (
∑Ni=1 fi)
2(3.6)
gain =
∑Ni=1 fi
∑Ni=1 pi − n
∑Ni=1(fi ∗ pi)
n∑N
i=1(fi)2 − (
∑Ni=1 fi)
2(3.7)
4. Para prevenir datos fuera del dominio (outliers), que tienen un efecto fuerte
sobre la transformacion, se fija el maximo valor del gain, (Mgain), para acotar
los valores permisibles de la forma:
1/Mgain ≤ gain ≤Mgain (3.8)
si no cumple esta condicion, entonces recalcular el gain y el bias usando la
media y la desviacion estandar:
gain =σP
σF(3.9)
bias = µP − µF ∗ gain (3.10)
donde:

Capıtulo 3. Metodologıa 67
a) La media de los pıxeles comunes hallados en la imagen primaria
µP =1
N
N∑i=1
(primeDNi) (3.11)
b) La desviacion estandar de los pıxeles comunes hallados en la imagen prima-
ria
σP =1
(N − 1)
N∑i=1
(primeDNi − µp)2 (3.12)
c) La media de los pıxeles comunes hallados en la imagen relleno
σF =1
(N − 1)
N∑i=1
(fillDNi − µF )2 (3.13)
d) Luego se revisa la condicion (1) para los valores obtenidos, de no cumplirse:
gain = 1bias = µp − µF (3.14)
5. Calcular:
mergedDN = gain ∗ fillColor + bias (3.15)
donde fillColor es el color del pıxel de relleno
6. Finalmente
gap = mergedDN (3.16)
Esta misma tecnica de relleno de gaps se empleo para las imagenes satelitales de los
anos 2008 y 2012 como indica la (Tabla 3.16):
Satelite Anos
Landsat 7-ETM+ 2008Landsat 7-ETM+ 2012
Tabla 3.16: Imagenes satelitales con problemas de gaps.
Capıtulo 3. Metodologıa 68
(a) Imagen sin corregir (b) Imagen corregida con el algorit-mo
Figura 3.19: Tecnica de relleno de gaps
3.5. Procesado
Con el conjunto de escenas multibanda pre-procesadas de los anos seleccionados
2004 hasta el 2016, se procedio a realizar el desarrollo del ((diagrama metodologico))
como se muestra la Figura 3.20.
3.5.1. Combinacion de Imagenes - Stack Layer
Una vez realizado el previo pre-procesamiento de las imagenes satelitales , se em-
pezo con la etapa de Combinacion de Imagenes.
1. Se toman las imagenes satelitales de los anos 2004 al 2012 del Landsat 7-ETM+.
2. Se realiza la combinacion de bandas = {b1, b2, b3, b4, b5, b7}, se tiene en
cuenta que para el Landsat 7-ETM+ las bandas van desde banda 1 a la ban-
da 7, no entra en tal combinacion la banda 6 (termica o tirs) y la banda 8
(pancromatica).
3. Como resultado de la combinacion de bandas se tiene la imagen multiespectral,
como indica la Figura 3.21.
Este mismo procedimiento se realiza para las imagenes satelitales del Landsat 8
OLI/TIRS.
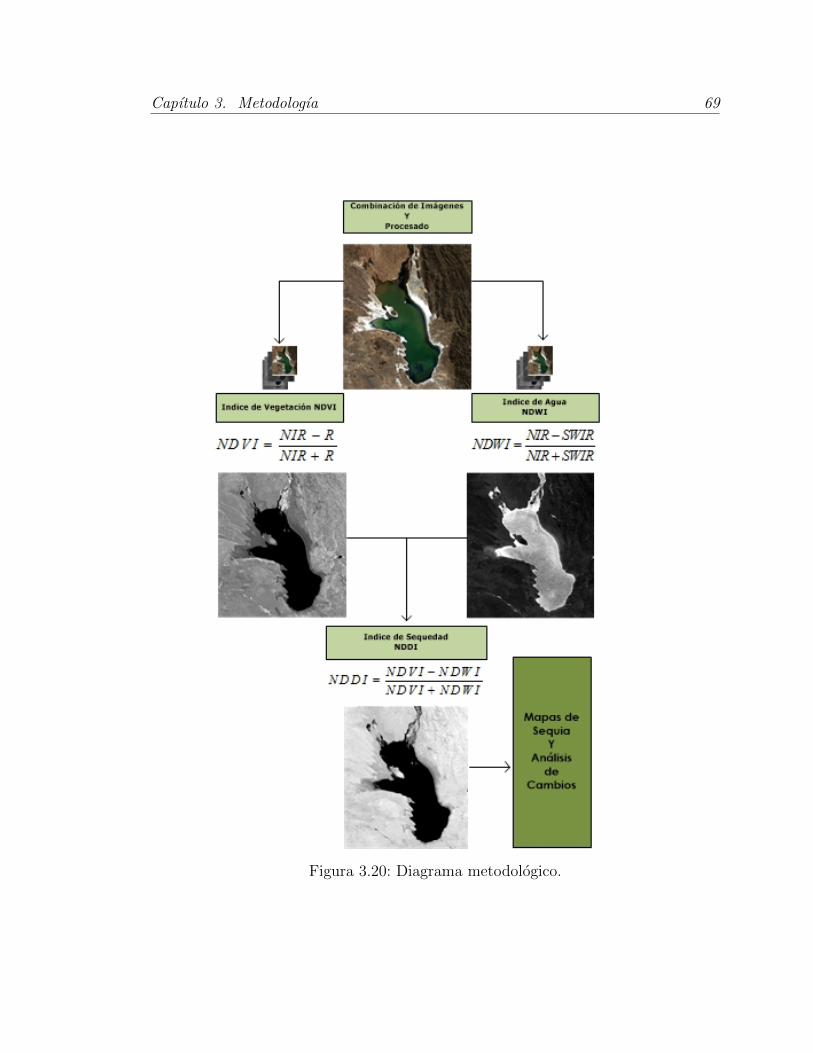
Capıtulo 3. Metodologıa 69
Figura 3.20: Diagrama metodologico.
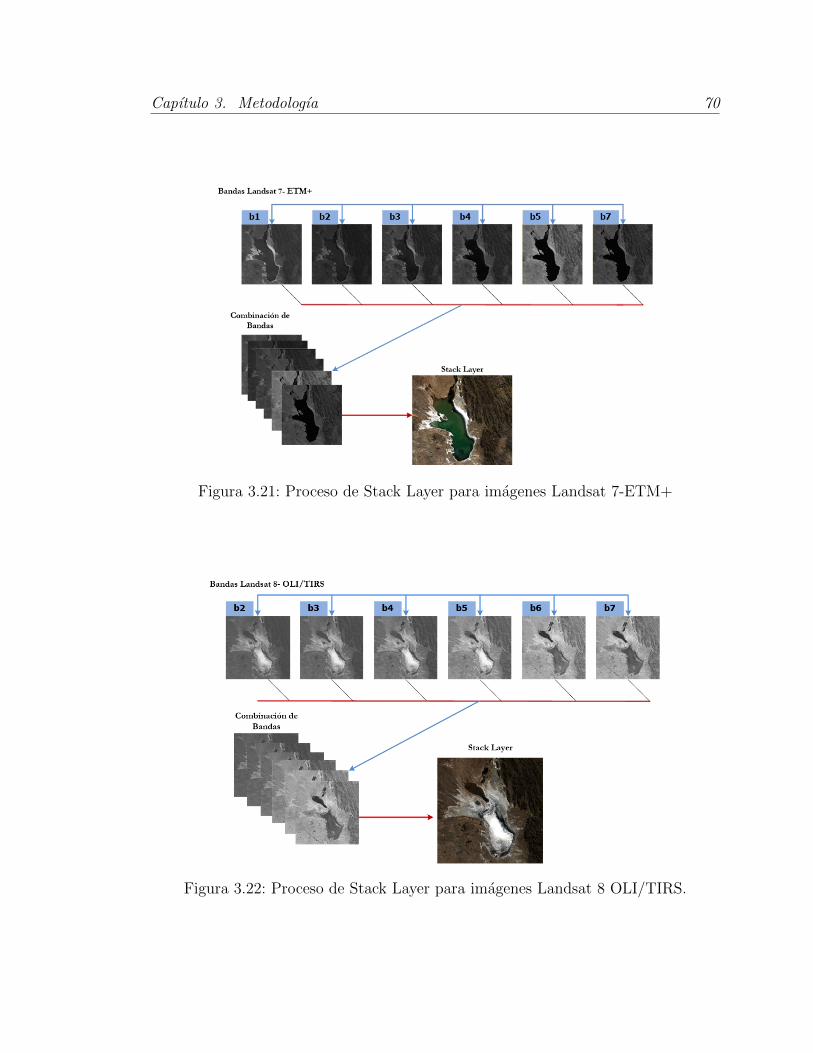
Capıtulo 3. Metodologıa 70
Figura 3.21: Proceso de Stack Layer para imagenes Landsat 7-ETM+
Figura 3.22: Proceso de Stack Layer para imagenes Landsat 8 OLI/TIRS.
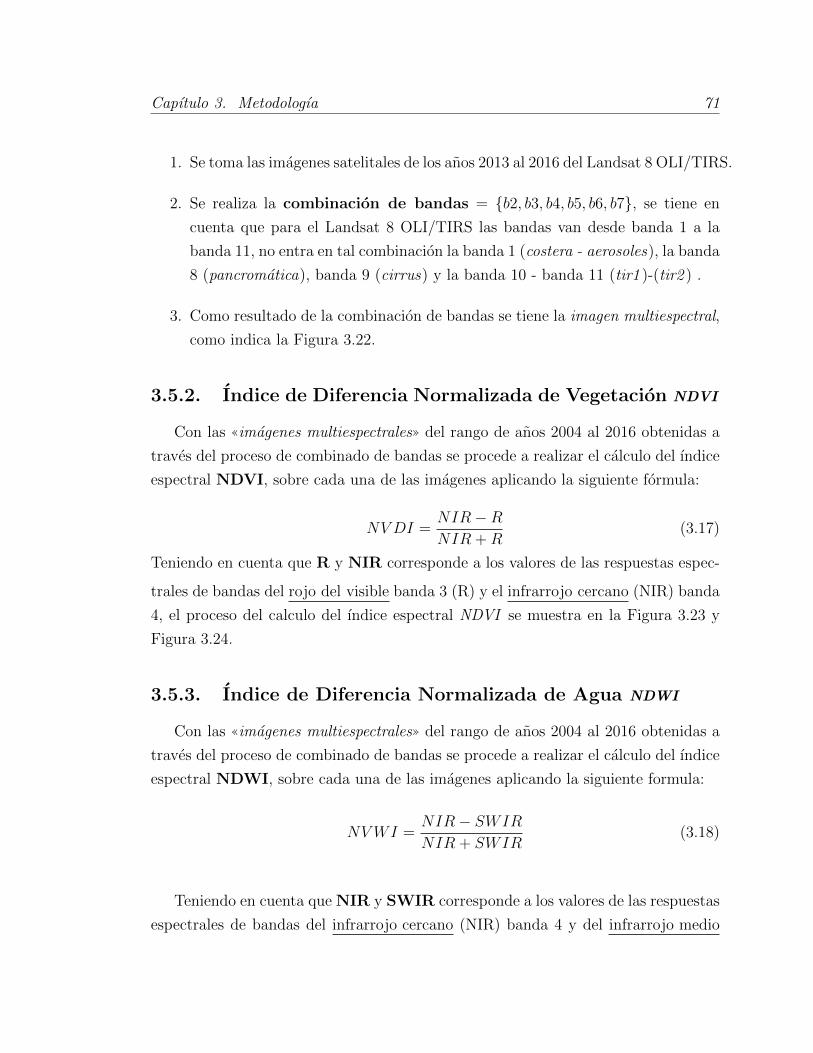
Capıtulo 3. Metodologıa 71
1. Se toma las imagenes satelitales de los anos 2013 al 2016 del Landsat 8 OLI/TIRS.
2. Se realiza la combinacion de bandas = {b2, b3, b4, b5, b6, b7}, se tiene en
cuenta que para el Landsat 8 OLI/TIRS las bandas van desde banda 1 a la
banda 11, no entra en tal combinacion la banda 1 (costera - aerosoles), la banda
8 (pancromatica), banda 9 (cirrus) y la banda 10 - banda 11 (tir1 )-(tir2 ) .
3. Como resultado de la combinacion de bandas se tiene la imagen multiespectral,
como indica la Figura 3.22.
3.5.2. Indice de Diferencia Normalizada de Vegetacion NDVI
Con las ((imagenes multiespectrales)) del rango de anos 2004 al 2016 obtenidas a
traves del proceso de combinado de bandas se procede a realizar el calculo del ındice
espectral NDVI, sobre cada una de las imagenes aplicando la siguiente formula:
NVDI =NIR−RNIR +R
(3.17)
Teniendo en cuenta que R y NIR corresponde a los valores de las respuestas espec-
trales de bandas del rojo del visible banda 3 (R) y el infrarrojo cercano (NIR) banda
4, el proceso del calculo del ındice espectral NDVI se muestra en la Figura 3.23 y
Figura 3.24.
3.5.3. Indice de Diferencia Normalizada de Agua NDWI
Con las ((imagenes multiespectrales)) del rango de anos 2004 al 2016 obtenidas a
traves del proceso de combinado de bandas se procede a realizar el calculo del ındice
espectral NDWI, sobre cada una de las imagenes aplicando la siguiente formula:
NVWI =NIR− SWIR
NIR + SWIR(3.18)
Teniendo en cuenta que NIR y SWIR corresponde a los valores de las respuestas
espectrales de bandas del infrarrojo cercano (NIR) banda 4 y del infrarrojo medio
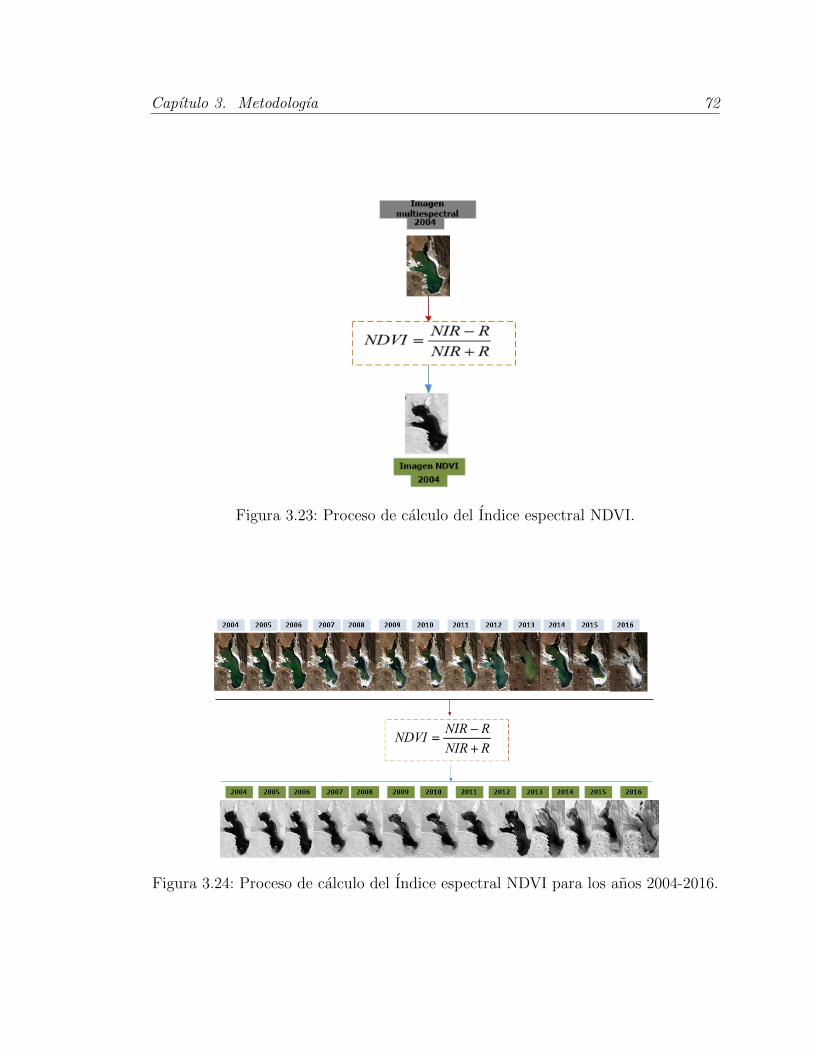
Capıtulo 3. Metodologıa 72
Figura 3.23: Proceso de calculo del Indice espectral NDVI.
Figura 3.24: Proceso de calculo del Indice espectral NDVI para los anos 2004-2016.
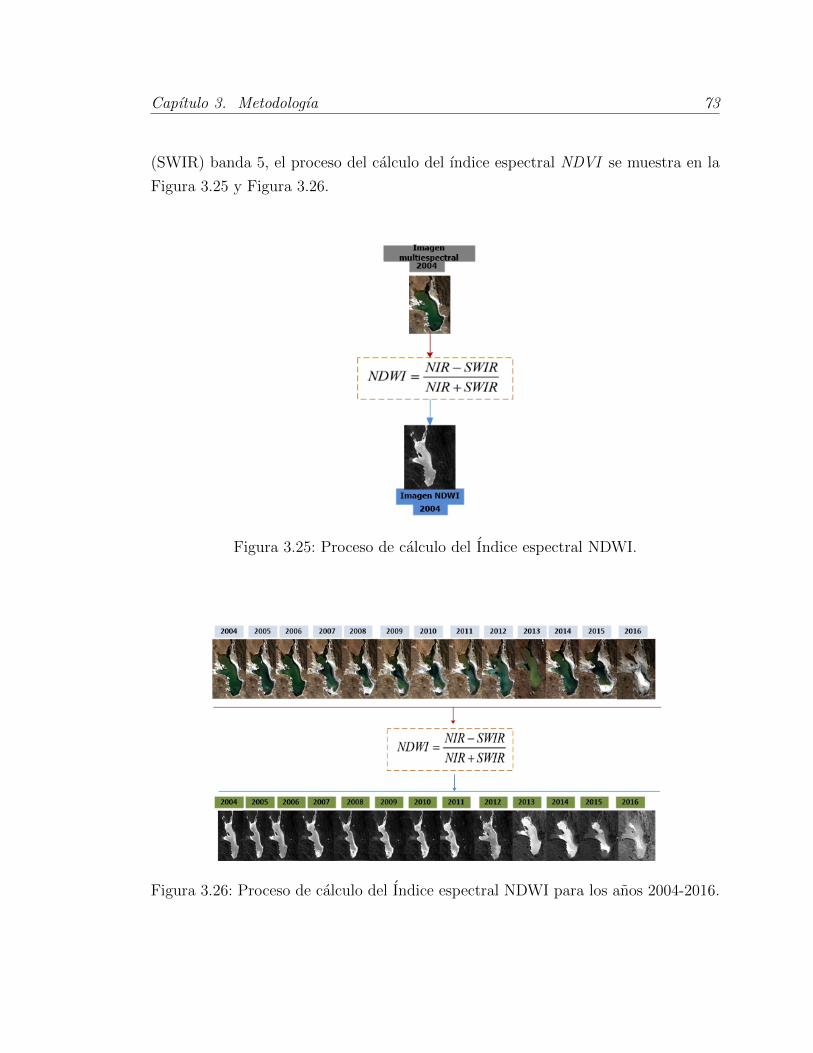
Capıtulo 3. Metodologıa 73
(SWIR) banda 5, el proceso del calculo del ındice espectral NDVI se muestra en la
Figura 3.25 y Figura 3.26.
Figura 3.25: Proceso de calculo del Indice espectral NDWI.
Figura 3.26: Proceso de calculo del Indice espectral NDWI para los anos 2004-2016.
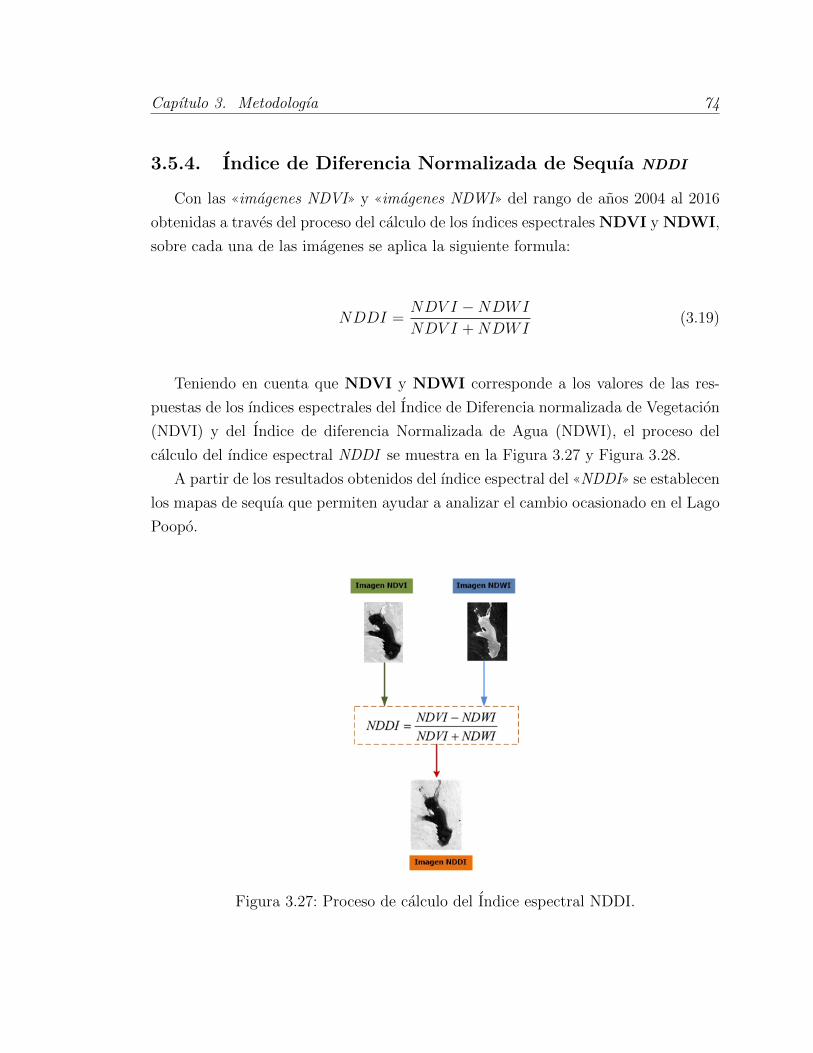
Capıtulo 3. Metodologıa 74
3.5.4. Indice de Diferencia Normalizada de Sequıa NDDI
Con las ((imagenes NDVI)) y ((imagenes NDWI)) del rango de anos 2004 al 2016
obtenidas a traves del proceso del calculo de los ındices espectrales NDVI y NDWI,
sobre cada una de las imagenes se aplica la siguiente formula:
NDDI =NDV I −NDWI
NDV I +NDWI(3.19)
Teniendo en cuenta que NDVI y NDWI corresponde a los valores de las res-
puestas de los ındices espectrales del Indice de Diferencia normalizada de Vegetacion
(NDVI) y del Indice de diferencia Normalizada de Agua (NDWI), el proceso del
calculo del ındice espectral NDDI se muestra en la Figura 3.27 y Figura 3.28.
A partir de los resultados obtenidos del ındice espectral del ((NDDI)) se establecen
los mapas de sequıa que permiten ayudar a analizar el cambio ocasionado en el Lago
Poopo.
Figura 3.27: Proceso de calculo del Indice espectral NDDI.
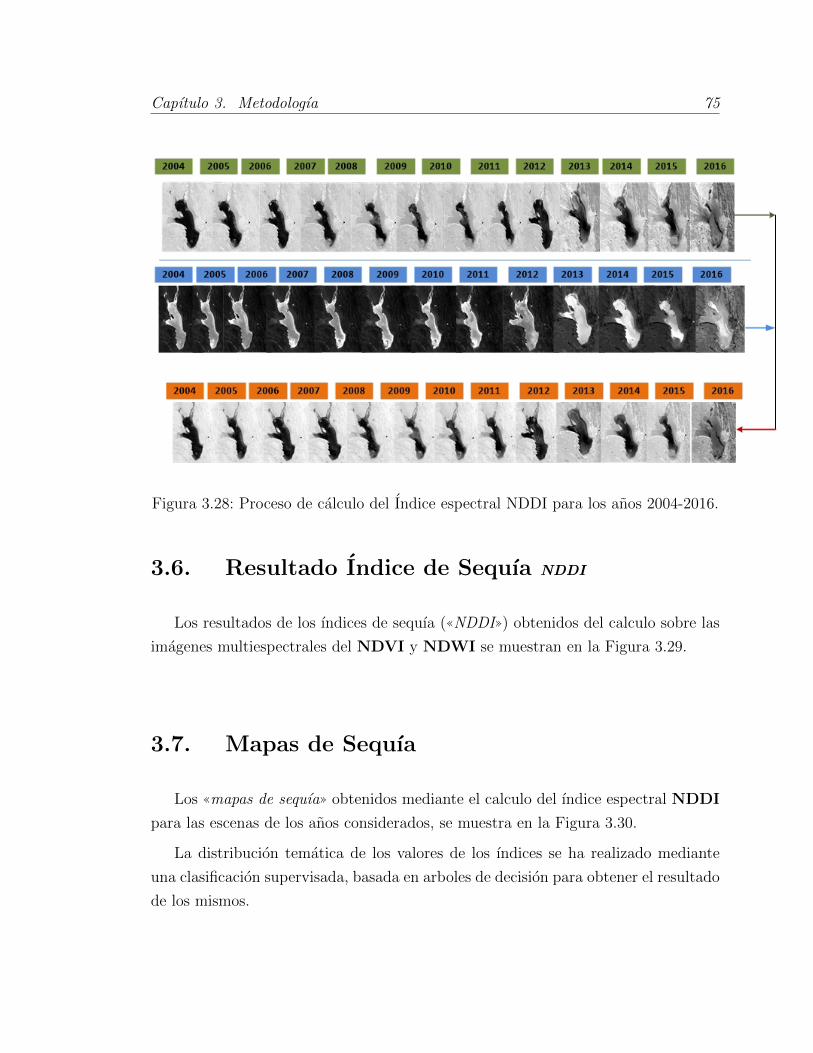
Capıtulo 3. Metodologıa 75
Figura 3.28: Proceso de calculo del Indice espectral NDDI para los anos 2004-2016.
3.6. Resultado Indice de Sequıa NDDI
Los resultados de los ındices de sequıa (((NDDI))) obtenidos del calculo sobre las
imagenes multiespectrales del NDVI y NDWI se muestran en la Figura 3.29.
3.7. Mapas de Sequıa
Los ((mapas de sequıa)) obtenidos mediante el calculo del ındice espectral NDDI
para las escenas de los anos considerados, se muestra en la Figura 3.30.
La distribucion tematica de los valores de los ındices se ha realizado mediante
una clasificacion supervisada, basada en arboles de decision para obtener el resultado
de los mismos.

Capıtulo 3. Metodologıa 76
(a) NDDI 2004 - 2006
(b) NDDI 2007 - 2009
(c) NDDI 2010 - 2012
(d) NDDI 2013 - 2016
Figura 3.29: Imagenes de los resultados de los Indices de sequıa 2004 - 2016 LagoPoopo.
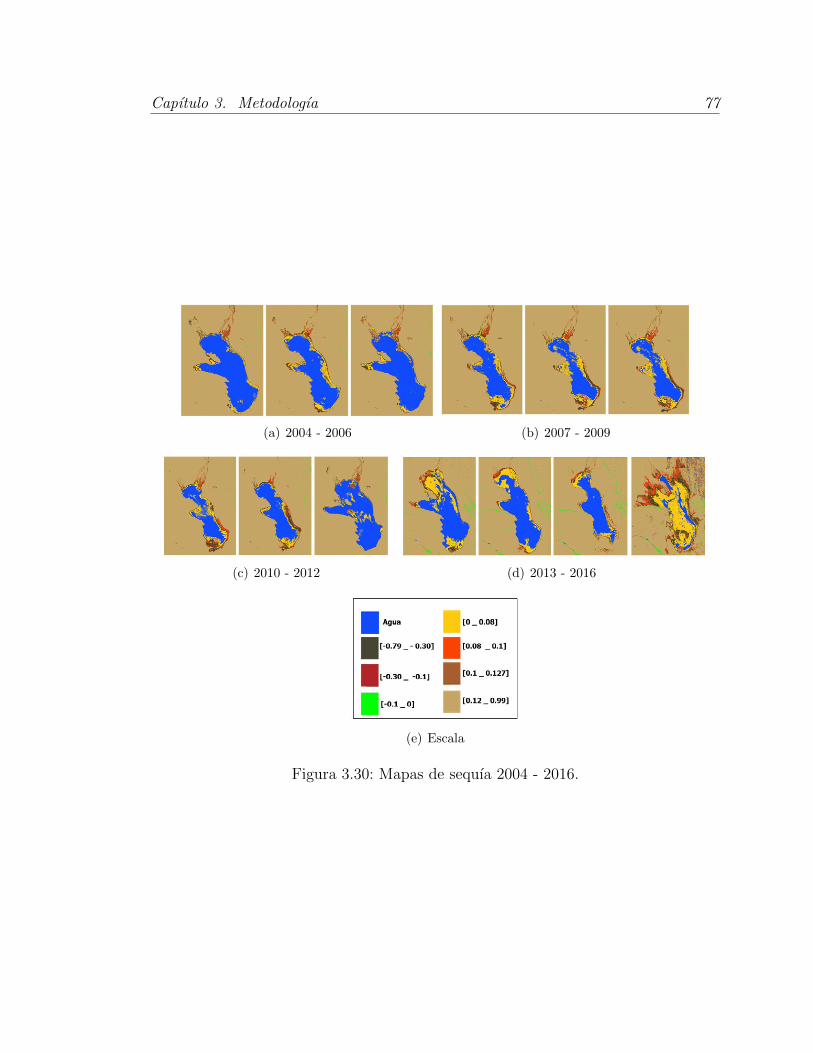
Capıtulo 3. Metodologıa 77
(a) 2004 - 2006 (b) 2007 - 2009
(c) 2010 - 2012 (d) 2013 - 2016
(e) Escala
Figura 3.30: Mapas de sequıa 2004 - 2016.
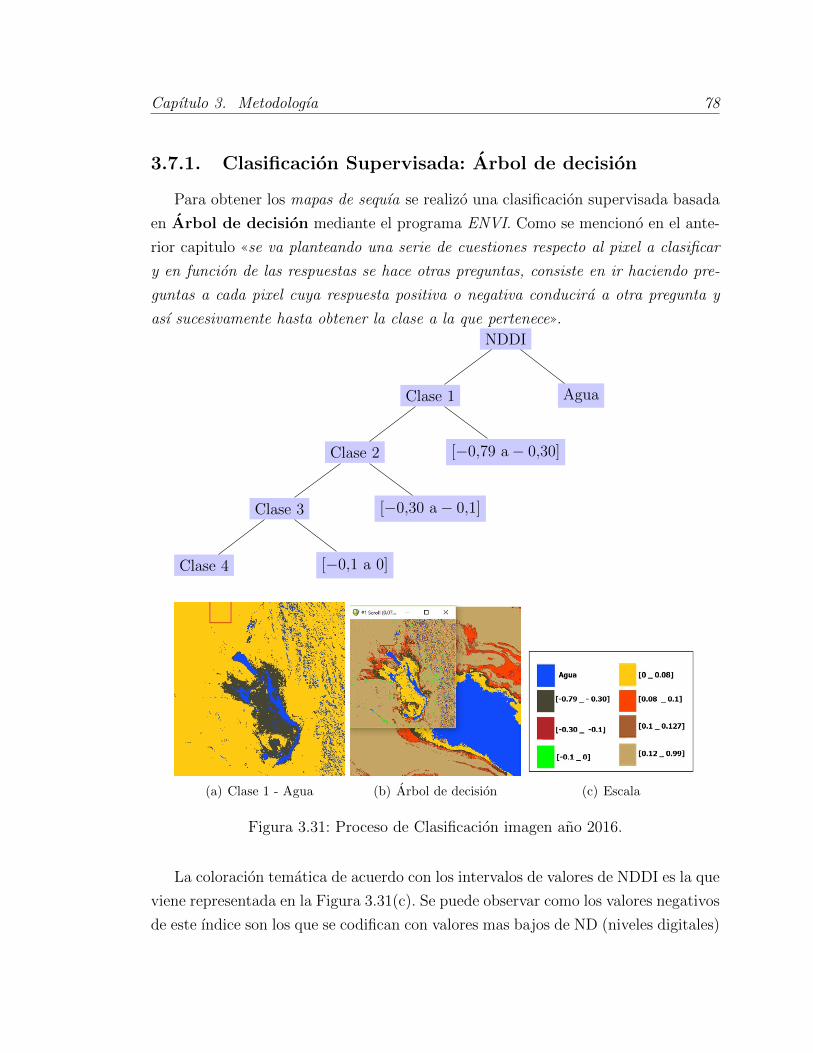
Capıtulo 3. Metodologıa 78
3.7.1. Clasificacion Supervisada: Arbol de decision
Para obtener los mapas de sequıa se realizo una clasificacion supervisada basada
en Arbol de decision mediante el programa ENVI. Como se menciono en el ante-
rior capitulo ((se va planteando una serie de cuestiones respecto al pixel a clasificar
y en funcion de las respuestas se hace otras preguntas, consiste en ir haciendo pre-
guntas a cada pixel cuya respuesta positiva o negativa conducira a otra pregunta y
ası sucesivamente hasta obtener la clase a la que pertenece)).
NDDI
Clase 1
Clase 2
Clase 3
Clase 4 [−0,1 a 0]
[−0,30 a− 0,1]
[−0,79 a− 0,30]
Agua
(a) Clase 1 - Agua (b) Arbol de decision (c) Escala
Figura 3.31: Proceso de Clasificacion imagen ano 2016.
La coloracion tematica de acuerdo con los intervalos de valores de NDDI es la que
viene representada en la Figura 3.31(c). Se puede observar como los valores negativos
de este ındice son los que se codifican con valores mas bajos de ND (niveles digitales)
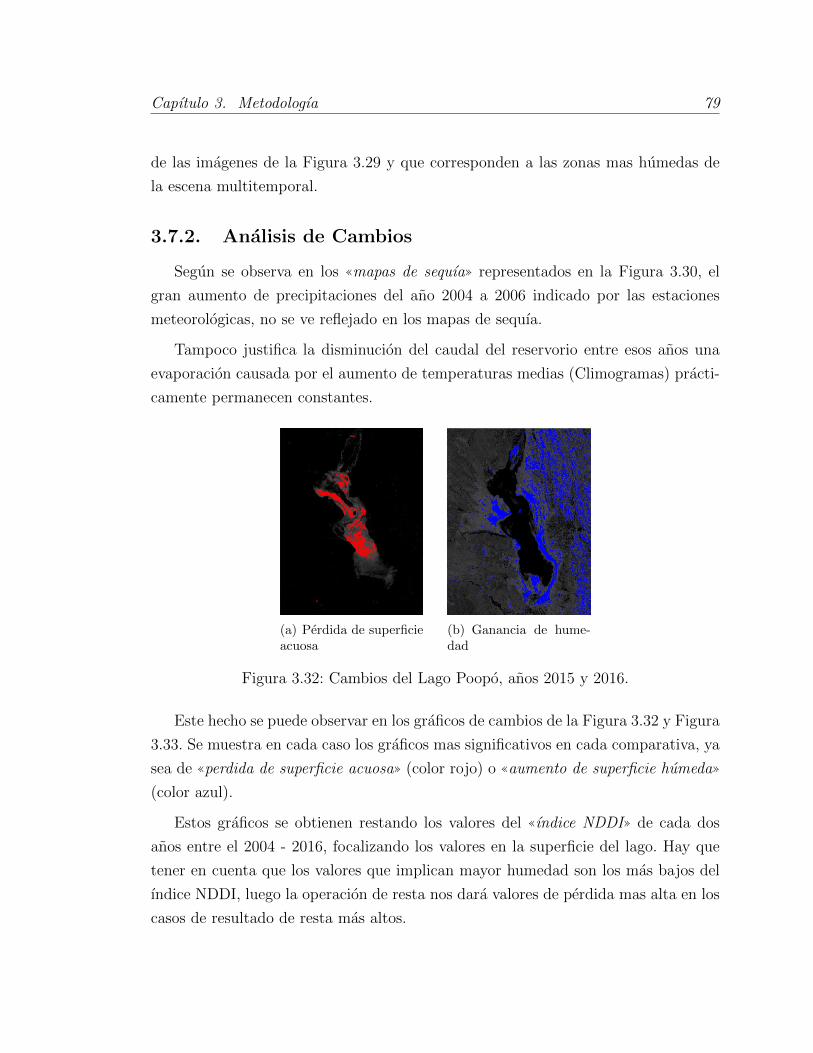
Capıtulo 3. Metodologıa 79
de las imagenes de la Figura 3.29 y que corresponden a las zonas mas humedas de
la escena multitemporal.
3.7.2. Analisis de Cambios
Segun se observa en los ((mapas de sequıa)) representados en la Figura 3.30, el
gran aumento de precipitaciones del ano 2004 a 2006 indicado por las estaciones
meteorologicas, no se ve reflejado en los mapas de sequıa.
Tampoco justifica la disminucion del caudal del reservorio entre esos anos una
evaporacion causada por el aumento de temperaturas medias (Climogramas) practi-
camente permanecen constantes.
(a) Perdida de superficieacuosa
(b) Ganancia de hume-dad
Figura 3.32: Cambios del Lago Poopo, anos 2015 y 2016.
Este hecho se puede observar en los graficos de cambios de la Figura 3.32 y Figura
3.33. Se muestra en cada caso los graficos mas significativos en cada comparativa, ya
sea de ((perdida de superficie acuosa)) (color rojo) o ((aumento de superficie humeda))
(color azul).
Estos graficos se obtienen restando los valores del ((ındice NDDI)) de cada dos
anos entre el 2004 - 2016, focalizando los valores en la superficie del lago. Hay que
tener en cuenta que los valores que implican mayor humedad son los mas bajos del
ındice NDDI, luego la operacion de resta nos dara valores de perdida mas alta en los
casos de resultado de resta mas altos.
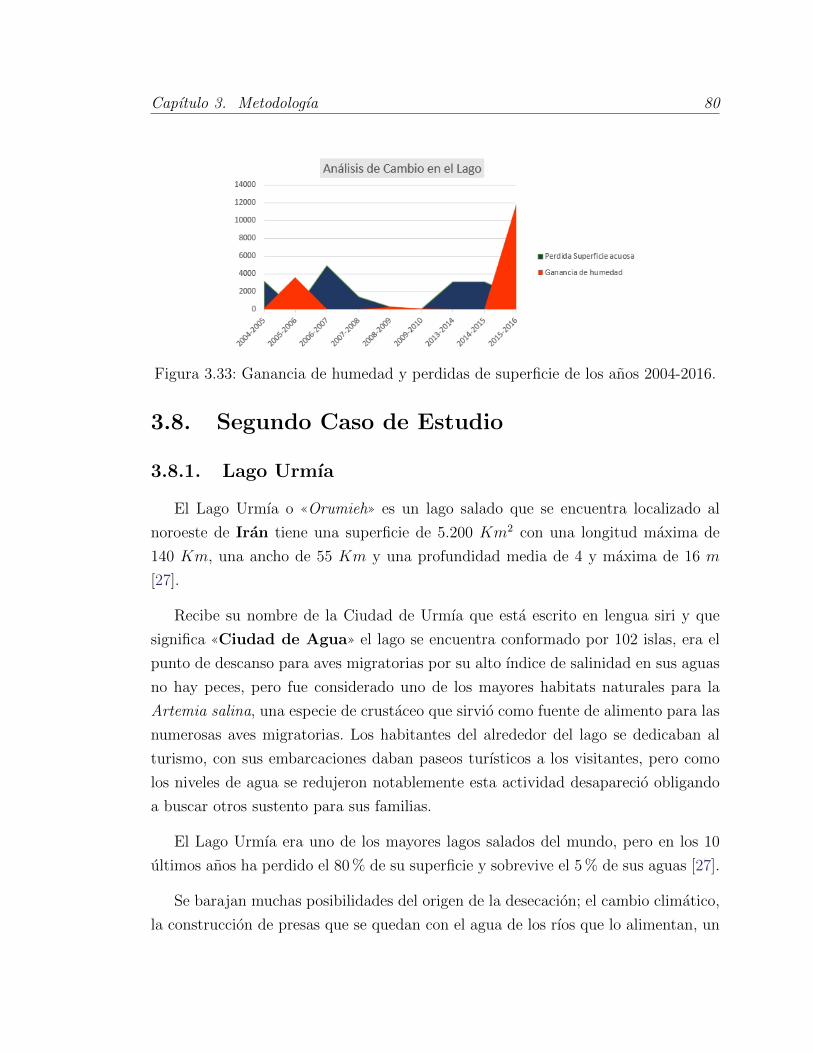
Capıtulo 3. Metodologıa 80
Figura 3.33: Ganancia de humedad y perdidas de superficie de los anos 2004-2016.
3.8. Segundo Caso de Estudio
3.8.1. Lago Urmıa
El Lago Urmıa o ((Orumieh)) es un lago salado que se encuentra localizado al
noroeste de Iran tiene una superficie de 5.200 Km2 con una longitud maxima de
140 Km, una ancho de 55 Km y una profundidad media de 4 y maxima de 16 m
[27].
Recibe su nombre de la Ciudad de Urmıa que esta escrito en lengua siri y que
significa ((Ciudad de Agua)) el lago se encuentra conformado por 102 islas, era el
punto de descanso para aves migratorias por su alto ındice de salinidad en sus aguas
no hay peces, pero fue considerado uno de los mayores habitats naturales para la
Artemia salina, una especie de crustaceo que sirvio como fuente de alimento para las
numerosas aves migratorias. Los habitantes del alrededor del lago se dedicaban al
turismo, con sus embarcaciones daban paseos turısticos a los visitantes, pero como
los niveles de agua se redujeron notablemente esta actividad desaparecio obligando
a buscar otros sustento para sus familias.
El Lago Urmıa era uno de los mayores lagos salados del mundo, pero en los 10
ultimos anos ha perdido el 80 % de su superficie y sobrevive el 5 % de sus aguas [27].
Se barajan muchas posibilidades del origen de la desecacion; el cambio climatico,
la construccion de presas que se quedan con el agua de los rıos que lo alimentan, un
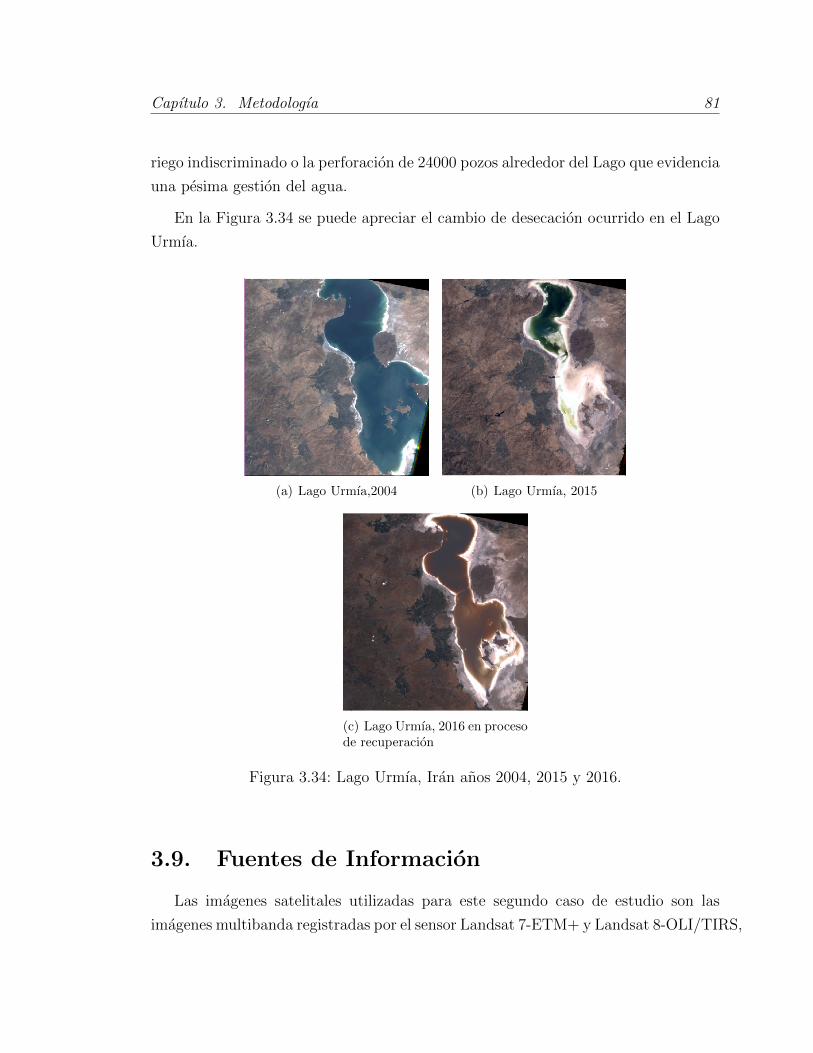
Capıtulo 3. Metodologıa 81
riego indiscriminado o la perforacion de 24000 pozos alrededor del Lago que evidencia
una pesima gestion del agua.
En la Figura 3.34 se puede apreciar el cambio de desecacion ocurrido en el Lago
Urmıa.
(a) Lago Urmıa,2004 (b) Lago Urmıa, 2015
(c) Lago Urmıa, 2016 en procesode recuperacion
Figura 3.34: Lago Urmıa, Iran anos 2004, 2015 y 2016.
3.9. Fuentes de Informacion
Las imagenes satelitales utilizadas para este segundo caso de estudio son las
imagenes multibanda registradas por el sensor Landsat 7-ETM+ y Landsat 8-OLI/TIRS,
Capıtulo 3. Metodologıa 82
suministradas por la Agencia de Servicio Geologico de los Estados Unidos(USGS)
United States Geological Survey[18].
Los anos seleccionados para la descarga de las imagenes satelitales van desde
2004 (2004 - 2012) obtenidas a traves del Landsat 7-ETM+ a 2016 (2013 - 2016)
del Landsat 8-OLI/TIRS, las imagenes satelitales son del tamano 3967.73 x 4237.07
pıxeles, las coordenadas del centro de las imagenes son 37◦39’18” N y 45◦0’00” E. Se
ha verificado el corregistro en las imagenes.
3.10. Estudio de Precipitaciones
Algunas fuentes de informacion estan reservadas sin posibilidad de obtener dato
alguno, este es el caso de informacion de las temperaturas y precipitaciones para la
construccion del ((estudio de precipitaciones)). Para subsanar este inconveniente se
reviso informacion relacionada con el tiempo y clima de la Ciudad de Urmıa donde
se encuentra ubicado el lago.
Para identificar los meses que comprenden la estacion de lluvia y la temporada
seca, con el proposito de buscar un mes que no se vea reflejado por estas dos estaciones
extremas, realizamos el estudio siguiente.
3.10.1. Descripcion breve del clima en Urmıa
Las temperaturas en Iran pueden variar de un lugar a otro las zonas montanosas
pueden ser muy frıas y el desierto pueden tener temperaturas altas. En el noroeste
de Iran los inviernos son muy frıos con intensas nevadas y temperaturas bajo cero
en diciembre y enero. La primavera y el verano son relativamente suaves [27]. El
clima es templado y calido en Urmıa ciudad donde se encuentra ubicado el lago con
el mismo nombre. En invierno en Urmıa hay mucha mas lluvia que en verano, la
temperatura media anual en Urmıa se encuentra a 11,6◦C y las precipitaciones es de
390 mm al ano. El mes mas suave es agosto con 3 mm mientras que el mes de abril
es el que tiene mayor numero de precipitaciones del ano, se indica en la Figura 3.35.
Revisando algunas fuentes de informacion y la Figura 3.35 se determina que

Capıtulo 3. Metodologıa 83
Figura 3.35: Climograma aproximado de la Ciudad de Urmıa [27]
el mes que tiene bajas precipitaciones, a pesar de que la temperatura no lo es, es
((agosto)) el mismo que se elije para el desarrollo de este segundo caso de estudio.
3.11. Pre-procesado
Uno de los errores que se encontro en la descarga de las imagenes del Land-
sat 7-ETM+ fue los fallos en los sensores que generan los Data gaps (Correccion
radiometrica), la metodologıa que se utilizo fue procesar cada una de las bandas
del Landsat 7-ETM+ {B1, B2, B3, B4, B5, B7, B8(PAN)} de cada imagen de los
anos seleccionados (2004 - 2016) mediante el programa de ENVI ya que este tiene
implementado el algoritmo computacional en su entorno de trabajo.
Los pasos a tener en cuenta para ejecutar el algoritmo son los que se detallan a
continuacion:
1. Preparar las escenas de trabajo utilizando el programa de procesamiento de
imagenes ENVI, para pasarlas como una entrada correcta al algoritmo selec-
cionado.
2. Implementar un algoritmo de relleno utilizando el Phase 2 Gap-Fill Algorithm

Capıtulo 3. Metodologıa 84
Para que el algoritmo sea efectivo, las escenas de entrada deben de cumplir dos
condiciones fundamentales.
a) Deben tener el mismo tamano en cuanto a filas x columnas y la misma localizacion
geografica.
b) Deben estar libres de nubes y sombras.
Esta misma tecnica de relleno de gaps se empleo para las imagenes satelitales del
Landsat 7-ETM+ que se describen en la (Tabla 3.17) y se muestra en la Figura 3.36
Satelite Anos
Landsat 7-ETM+ 2004Landsat 7-ETM+ 2005Landsat 7-ETM+ 2006Landsat 7-ETM+ 2007Landsat 7-ETM+ 2008Landsat 7-ETM+ 2009Landsat 7-ETM+ 2010Landsat 7-ETM+ 2011Landsat 7-ETM+ 2012
Tabla 3.17: Imagenes satelitales con problemas de gaps.
(a) Con gap Lago Urmıa, 2016 (b) Sin gap Lago Urmıa, 2016
Figura 3.36: Gaps producidos por el SLC-off.
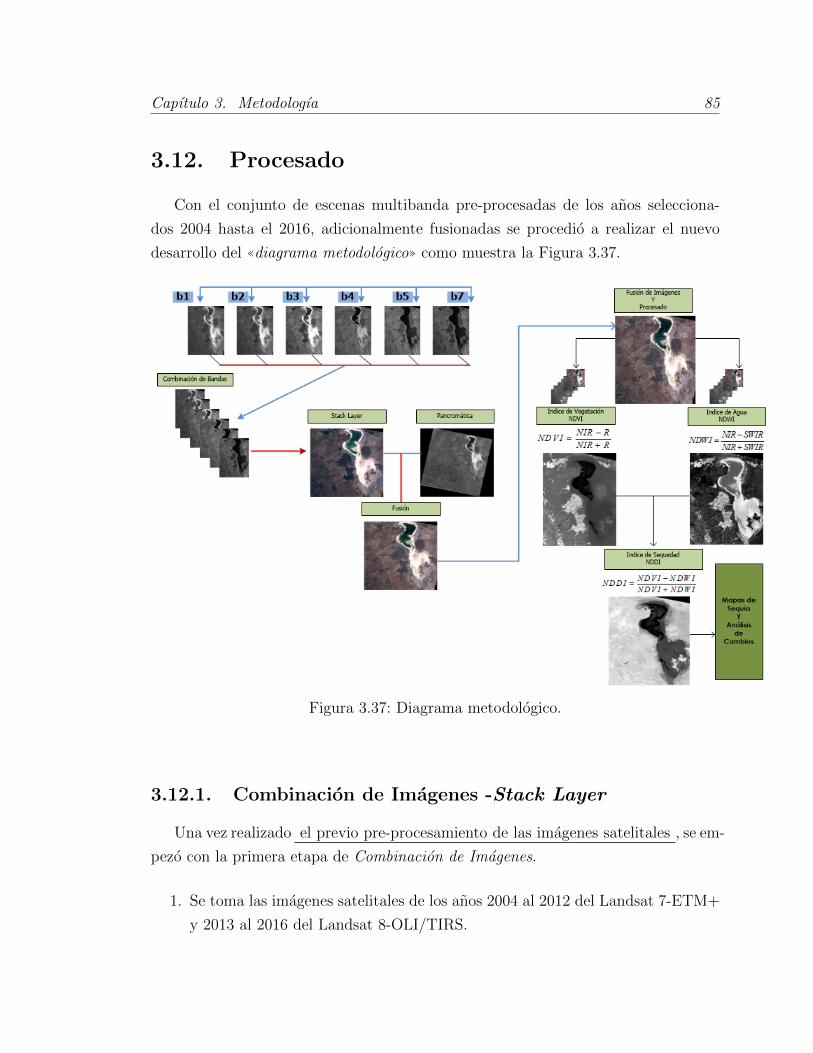
Capıtulo 3. Metodologıa 85
3.12. Procesado
Con el conjunto de escenas multibanda pre-procesadas de los anos selecciona-
dos 2004 hasta el 2016, adicionalmente fusionadas se procedio a realizar el nuevo
desarrollo del ((diagrama metodologico)) como muestra la Figura 3.37.
Figura 3.37: Diagrama metodologico.
3.12.1. Combinacion de Imagenes -Stack Layer
Una vez realizado el previo pre-procesamiento de las imagenes satelitales , se em-
pezo con la primera etapa de Combinacion de Imagenes.
1. Se toma las imagenes satelitales de los anos 2004 al 2012 del Landsat 7-ETM+
y 2013 al 2016 del Landsat 8-OLI/TIRS.
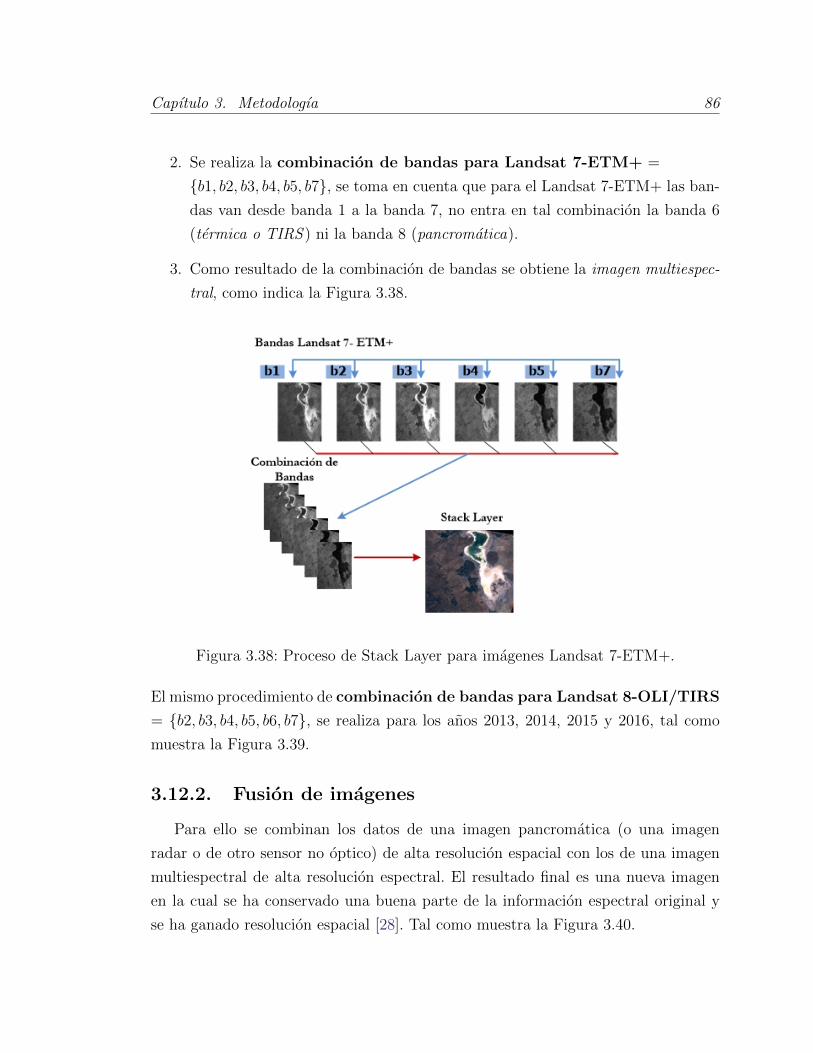
Capıtulo 3. Metodologıa 86
2. Se realiza la combinacion de bandas para Landsat 7-ETM+ =
{b1, b2, b3, b4, b5, b7}, se toma en cuenta que para el Landsat 7-ETM+ las ban-
das van desde banda 1 a la banda 7, no entra en tal combinacion la banda 6
(termica o TIRS ) ni la banda 8 (pancromatica).
3. Como resultado de la combinacion de bandas se obtiene la imagen multiespec-
tral, como indica la Figura 3.38.
Figura 3.38: Proceso de Stack Layer para imagenes Landsat 7-ETM+.
El mismo procedimiento de combinacion de bandas para Landsat 8-OLI/TIRS
= {b2, b3, b4, b5, b6, b7}, se realiza para los anos 2013, 2014, 2015 y 2016, tal como
muestra la Figura 3.39.
3.12.2. Fusion de imagenes
Para ello se combinan los datos de una imagen pancromatica (o una imagen
radar o de otro sensor no optico) de alta resolucion espacial con los de una imagen
multiespectral de alta resolucion espectral. El resultado final es una nueva imagen
en la cual se ha conservado una buena parte de la informacion espectral original y
se ha ganado resolucion espacial [28]. Tal como muestra la Figura 3.40.
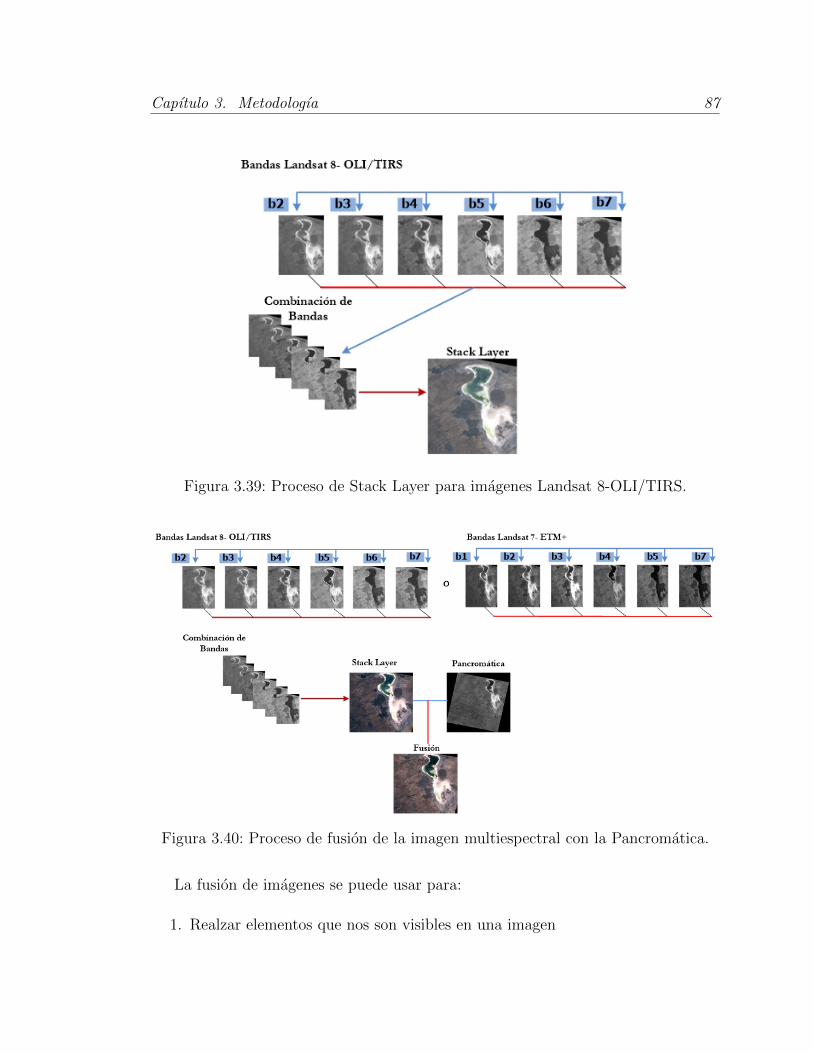
Capıtulo 3. Metodologıa 87
Figura 3.39: Proceso de Stack Layer para imagenes Landsat 8-OLI/TIRS.
Figura 3.40: Proceso de fusion de la imagen multiespectral con la Pancromatica.
La fusion de imagenes se puede usar para:
1. Realzar elementos que nos son visibles en una imagen
Capıtulo 3. Metodologıa 88
2. Complementar datos para mejorar una clasificacion.
3. Detectar cambios en una zona usando datos multitemporales
4. Adicionar datos faltantes en una imagen
3.12.2.1. Metodo de Componentes Principales (PCA)
Para el proceso de fusion se utiliza el algoritmo PCA, el objetivo del metodo de
Analisis de Componentes Principales (PCA) es resumir un grupo amplio de varia-
bles en un nuevo conjunto (mas pequeno) sin perder una parte significativa de la
informacion original.
Este proceso se realiza a traves de la herramienta de 4 Erdas que tiene implemen-
tado en su interfaz el metodo PCA, aplica una transformacion inversa de componen-
tes principales con el proposito de conservar la radiometrıa original de la imagen.
3.12.3. Indice de Diferencia Normalizada de Vegetacion NDVI
Con las ((imagenes fusionadas)) del rango de anos 2004 al 2016 obtenidas a traves
del proceso de fusion se procede a realizar el calculo del ındice espectral NDVI,
sobre cada una de las imagenes multiespectrales, obteniendo el siguiente resultado
que muestra la Figura 3.41, donde se visualizan los resultados del calculo del ındice
NDVI de cada ano.
3.12.4. Indice de Diferencia Normalizada de Agua NDWI
Con las ((imagenes fusionadas)) del rango de anos 2004 al 2016 obtenidas a traves
del proceso de fusion se procede a realizar el calculo del ındice espectral NDWI,
sobre cada una de las imagenes dando el siguiente resultado como indica la Figura
3.42, donde se observa los resultados del calculo del ındice NDWI de cada ano.
4http://www.hexagongeospatial.com
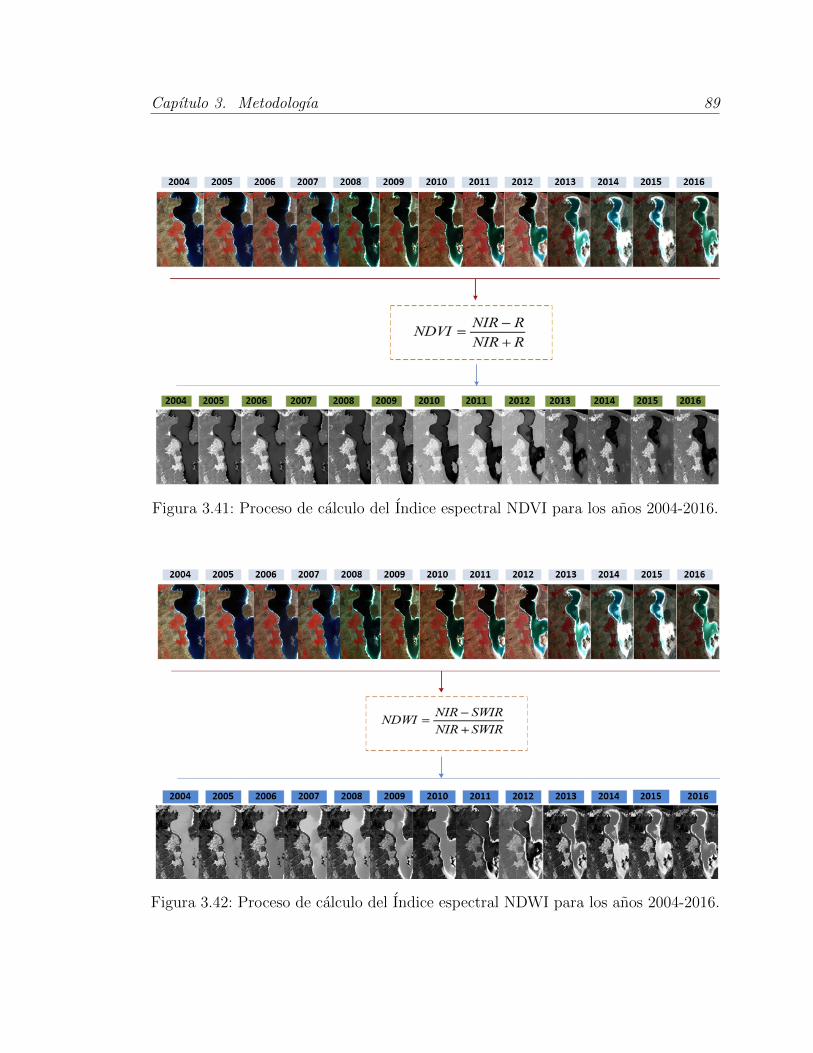
Capıtulo 3. Metodologıa 89
Figura 3.41: Proceso de calculo del Indice espectral NDVI para los anos 2004-2016.
Figura 3.42: Proceso de calculo del Indice espectral NDWI para los anos 2004-2016.

Capıtulo 3. Metodologıa 90
3.12.5. Indice de Diferencia Normalizada de Sequıa NDDI
Con los resultados de las ((imagenes NDVI)) y los resultados de las ((imagenes
NDWI)) del rango de anos comprendidos entre el 2004 al 2016 y obtenidas a traves
del proceso del calculo de los ındices espectrales NDVI y NDWI, sobre cada una de
las imagenes multiespectrales se obtiene el siguiente resultado como indica la Figura
3.43, donde se observa los resultados del ındice NDDI para cada ano.
Figura 3.43: Proceso de calculo del Indice espectral NDDI para los anos 2004-2016
3.13. Resultado Indice de Sequıa NDDI
Los resultados de los ındices de sequıa (((NDDI))) obtenidos del calculo sobre las
imagenes fusionadas del NDVI y NDWI se indica en la Figura 3.44.
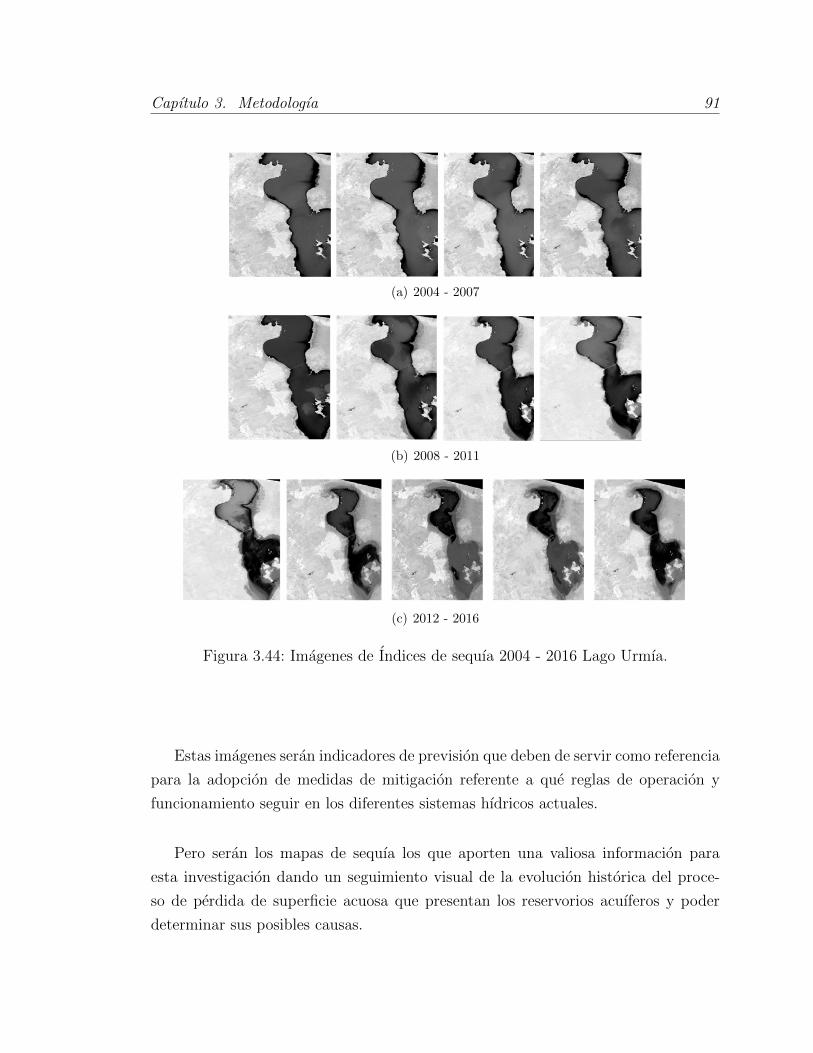
Capıtulo 3. Metodologıa 91
(a) 2004 - 2007
(b) 2008 - 2011
(c) 2012 - 2016
Figura 3.44: Imagenes de Indices de sequıa 2004 - 2016 Lago Urmıa.
Estas imagenes seran indicadores de prevision que deben de servir como referencia
para la adopcion de medidas de mitigacion referente a que reglas de operacion y
funcionamiento seguir en los diferentes sistemas hıdricos actuales.
Pero seran los mapas de sequıa los que aporten una valiosa informacion para
esta investigacion dando un seguimiento visual de la evolucion historica del proce-
so de perdida de superficie acuosa que presentan los reservorios acuıferos y poder
determinar sus posibles causas.

Capıtulo 3. Metodologıa 92
3.13.1. Clasificacion
3.13.1.1. Clasificacion No Supervisada: K-Means
Para obtener los ((mapas de sequıa)) se realizo una previa clasificacion no super-
visada basada en los ((K-Means)) a traves del programa de tratamiento de imagenes
((Erdas)), sirvio para encontrar los rangos de las areas a clasificar e identificar las
clases del lago.
La clasificacion mediante los ((K-means)) es un metodo de agrupamiento, que tiene
como objetivo la particion de un conjunto de n observaciones en k grupos en el que
cada observacion pertenece al grupo cuyo valor medio es mas cercano y que actua
como un prototipo de la agrupacion [30].
En la Figura 3.45 se observa una previa clasificacion no supervisada basada en
los ((K-means)) por cada ano [2004 - 2016 ] del Lago Urmıa, las mismas que serviran
para identificar el rango de las zonas de interes a clasificar. El rango que se obtuvo
en la previa clasificacion no supervisada basada en los ((K-Means)) es el que indica
la (Tabla 3.18), estos rangos son los que se ingresaran en la clasificacion supervisada
basada en ((arbol de decision)) que es la que se ha tomado para el desarrollo de esta
investigacion.
Clase Nombre Clase Rango
1 Agua Profunda [1 - 126]2 Agua Somera [126 - 150]3 Humedales [151 - 165]4 Arena [165 - 174]5 Secado/Urbano [174 - 182]6 Vegetacion [182 - 255]
Tabla 3.18: Rango de las clases
Como muestra la (Tabla 3.18) tenemos 6 clases con su respectivo rango estos
valores nos ayudaran a obtener los mapas de sequıa que nos serviran para dar segui-
miento de los cambios ocurridos en el Lago Urmıa.
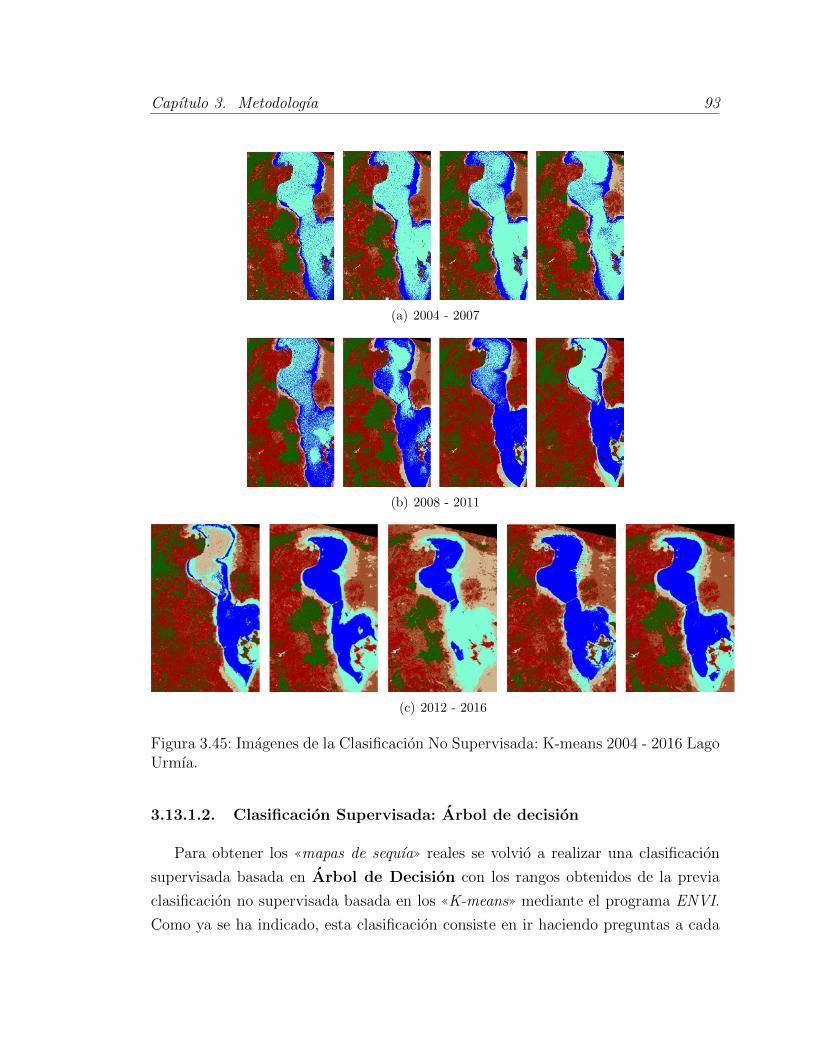
Capıtulo 3. Metodologıa 93
(a) 2004 - 2007
(b) 2008 - 2011
(c) 2012 - 2016
Figura 3.45: Imagenes de la Clasificacion No Supervisada: K-means 2004 - 2016 LagoUrmıa.
3.13.1.2. Clasificacion Supervisada: Arbol de decision
Para obtener los ((mapas de sequıa)) reales se volvio a realizar una clasificacion
supervisada basada en Arbol de Decision con los rangos obtenidos de la previa
clasificacion no supervisada basada en los ((K-means)) mediante el programa ENVI.
Como ya se ha indicado, esta clasificacion consiste en ir haciendo preguntas a cada
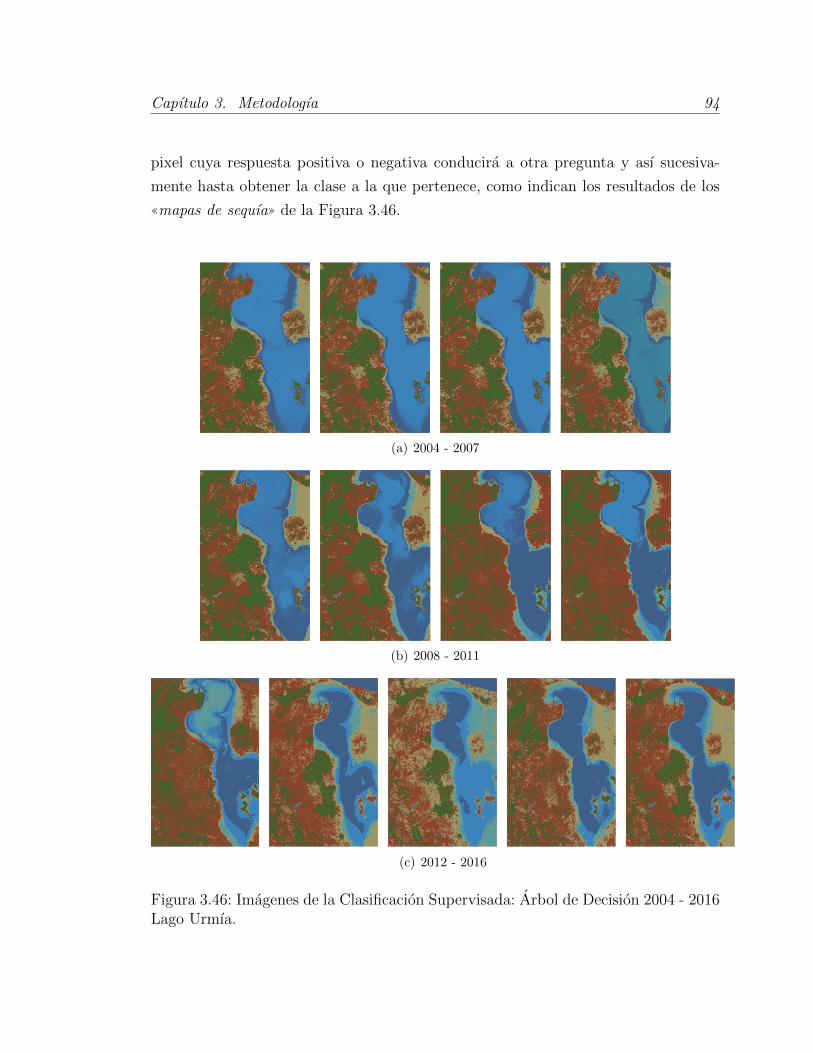
Capıtulo 3. Metodologıa 94
pixel cuya respuesta positiva o negativa conducira a otra pregunta y ası sucesiva-
mente hasta obtener la clase a la que pertenece, como indican los resultados de los
((mapas de sequıa)) de la Figura 3.46.
(a) 2004 - 2007
(b) 2008 - 2011
(c) 2012 - 2016
Figura 3.46: Imagenes de la Clasificacion Supervisada: Arbol de Decision 2004 - 2016Lago Urmıa.
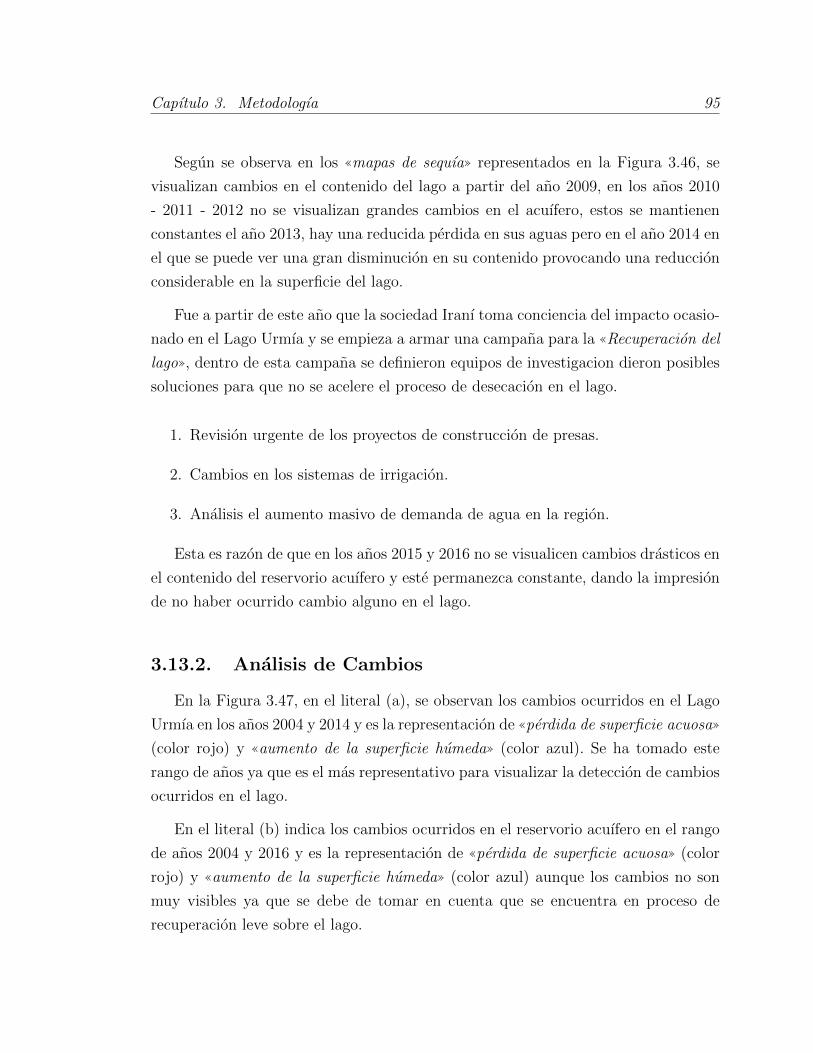
Capıtulo 3. Metodologıa 95
Segun se observa en los ((mapas de sequıa)) representados en la Figura 3.46, se
visualizan cambios en el contenido del lago a partir del ano 2009, en los anos 2010
- 2011 - 2012 no se visualizan grandes cambios en el acuıfero, estos se mantienen
constantes el ano 2013, hay una reducida perdida en sus aguas pero en el ano 2014 en
el que se puede ver una gran disminucion en su contenido provocando una reduccion
considerable en la superficie del lago.
Fue a partir de este ano que la sociedad Iranı toma conciencia del impacto ocasio-
nado en el Lago Urmıa y se empieza a armar una campana para la ((Recuperacion del
lago)), dentro de esta campana se definieron equipos de investigacion dieron posibles
soluciones para que no se acelere el proceso de desecacion en el lago.
1. Revision urgente de los proyectos de construccion de presas.
2. Cambios en los sistemas de irrigacion.
3. Analisis el aumento masivo de demanda de agua en la region.
Esta es razon de que en los anos 2015 y 2016 no se visualicen cambios drasticos en
el contenido del reservorio acuıfero y este permanezca constante, dando la impresion
de no haber ocurrido cambio alguno en el lago.
3.13.2. Analisis de Cambios
En la Figura 3.47, en el literal (a), se observan los cambios ocurridos en el Lago
Urmıa en los anos 2004 y 2014 y es la representacion de ((perdida de superficie acuosa))
(color rojo) y ((aumento de la superficie humeda)) (color azul). Se ha tomado este
rango de anos ya que es el mas representativo para visualizar la deteccion de cambios
ocurridos en el lago.
En el literal (b) indica los cambios ocurridos en el reservorio acuıfero en el rango
de anos 2004 y 2016 y es la representacion de ((perdida de superficie acuosa)) (color
rojo) y ((aumento de la superficie humeda)) (color azul) aunque los cambios no son
muy visibles ya que se debe de tomar en cuenta que se encuentra en proceso de
recuperacion leve sobre el lago.
Capıtulo 3. Metodologıa 96
(a) Cambios del Lago Urmia,anos 2004 y 2014.
(b) Cambios del Lago Urmia,anos 2004 y 2016.
(c) Cambios del Lago Urmia, anos2014 y 2016.
Figura 3.47: Perdida de superficie acuosa y aumento de la superficie humeda.

Capıtulo 3. Metodologıa 97
En el literal (c) indica los cambios ocasionados en el embalse en el rango de anos
2014 y 2016, es la representacion de ((perdida de superficie acuosa)) (color rojo) y
((aumento de la superficie humeda)) (color azul), aunque es mayor el aumento de la
superficie humeda se puede visualizar perdida de superficie acusa en el lago y la
vegetacion del alrededor del lago.
Figura 3.48: Ganancia de humedad y perdida de superficie de los anos 2004-2014,2004-2016 y 2014-2016
En la Figura 3.48 se tiene una grafica mas visual sobre el Analisis de Cambio en
el Lago de los anos mas representativos que son 2004 & 2014, 2004 & 2016 y 2014
& 2016.
Capıtulo 4
Conclusiones y Trabajos Futuros
El presente trabajo, ha puesto de manifesto la ventaja de utilizar los ındices
espectrales mediante el uso del tratamiento de imagenes multiespectrales de satelite
como una herramienta para el estudio de seguimiento que presentan los reservorios
acuosos.
Se escogio el ındice de sequıa NDDI por su facilidad de calculo ya que se basa en
la diferencia normalizada (adicion y sustraccion).
El beneficio de trabajar con este ındice es la imagen resultante del calculo del
mismo, presentando una mayor resolucion espacial, siendo un optimo indicador ya
que facilita la comprension del proceso de desecacion a traves de la observacion de
los resultados de los graficos.
La sequıa se esta considerando como una anomalıa climatologica que puede ser
transitoria o no y va a depender de la disponibilidad de agua. Se estudiara si este
recurso natural no es el suficiente para abastecer las necesidades de las plantas, los
animales y los humanos que viven en una area geografica determinada.
La causa principal de toda sequıa es la falta de lluvias o precipitaciones, a es-
te fenomeno se le denomina sequıa meteorologica y si perdura, se deriva en una
sequıa hidrologica, caracterizada por la desigualdad entre la disponibilidad natural
de agua y las demandas naturales de agua y en casos extremos puede llegar a una
desertificacion.
A traves del Climograma disenado para el Lago Poopo se ha observado que a
98

Capıtulo 4. Conclusiones y Trabajos Futuros 99
pesar que la region tuvo precipitaciones altas en diferentes anos este no indica que
el reservorio acuıfero se llene. Este hecho puede ser debido a otros factores como:
evaporacion, absorcion e infiltracion de agua del suelo o vegetacion de las zonas
cercanas al mismo y hace que baje el nivel de contenido del lago. Es aquı donde los
mapas de sequıa obtenidos del calculo del NDDI justifican mas adecuadamente el
analisis de deteccion de cambios.
Los mapas de sequıa han aportado una valiosa informacion en esta investigacion
que es dar un seguimiento visual de la evolucion historica del proceso de perdida
de superficie acuosa que presentan los reservorios acuıferos y poder determinar sus
posibles causas.
El no tener la informacion abierta para el segundo caso de estudio (Lago Urmıa)
ha provocado en esta investigacion que no se desarrolle los Climogramas para realizar
una comparativa con los datos obtenidos a traves de las estaciones meteorologicos
de la zona.
En futuros trabajos se realizaran modelos de volumen para tener un mayor co-
nocimiento de la cantidad de agua que se va perdiendo en los reservorios acuosos
a lo largo de los anos, hecho que puede permitir conocer las causas del proceso de
desertificacion que parece se esta produciendo en las zona de estudio.
Dado que el segundo caso de estudio se ha tenido problemas de ajuste en la
obtencion de los mapas sequıa y por querer llegar a una metodologıa general, se esta
contemplando la posibilidad de calcular nuevos ındices espectrales introduciendo
operaciones aritmeticas sobre bandas que puedan a portar informacion mas precisa
en la clasificacion.
Asimismo se estan estudiando nuevos metodos de clasificacion supervisada basa-
dos en bosques aleatorios ”Ramdom Forest” que nos permitirıa obtener clases con
mas exactitud en la discriminacion
Bibliografıa
[1] Ecoosfera,”8 rios y lagos que se estan secando por el calentamiento global”
[En linea]. Disponible en: http://ecoosfera.com, Febrero 5, 2016.
[2] J. Reyes, A. Vela Mayorga,”Fundamentos Fısicos en la Teledeteccion.”
[3] E. Chuvieco, ”Fundamentos de teledeteccion espacial”, Ediciones Rialp, 1996.
[4] J. Burrows, U. Platt and P. Borrell, ”The remote sensing of tropospheric
composition from space”, Springer Science & Business Media, 2011.
[5] Universidad de Murcia, clasificacion [En linea]. Disponible en
http://www.um.es
[6] Universidad de Jaen, Ingenierıa Tecnica en topografıa, ”Teledeteccion” [En
linea]. Disponible en:www.ujaen.es
[7] J.L. Chavez, ”Introduccion al tratamiento digital de imagenes”, 2002.
[8] A. Arozerena Villar, Universidad Politecnica de Madrid, ”Teledeteccion y
Sistemas de tratamiento digital de imagenes”, [En linea]. Disponible en:
http://ocw.upm.es/, Abril 2001
[9] Universidad de Murcia, ”Correciones a las imagenes de satelites”, [En linea].
Disponible en: http://www.um.es
[10] G. Ambrosio, J. Gonzales and V. Arevalo,”Comparacion de imagenes de
satelite para la deteccion de cambios temporales”, Malaga, Espana. Dpto. In-
genierıa de Sistemas y Automatica. Universidad de Malaga. Disponible en:
http://www.cea-ifaces
100
Bibliografıa 101
[11] J.G. Rejas Ayuga, Master en Ingeniera Medioambiental y Gestion del Agua,
”Sistema de Informacion Geografica y Teledeteccion”, [En linea]. Disponible
en: https://www.eoi.es/, Noviembre 1987
[12] Wikipedia, ”Indice de vegetacion de diferencia normalizada”, [En linea]. Dis-
ponible en: https://es.wikipedia.org/wiki/
[13] J. Verdin, D. Pedreros and G. Eilerts, ”Indice Diferencial de Vegetacion Nor-
malizado (NDVI)” . FEWS-Red de Alerta Temprana Contra la Inseguridad
Alimentaria, Centroamerica, USGS/EROS Data Center.G. (2003).
[14] S.K. McFeeters, ”The use of the Normalized Difference Water Index (NDWI)
in the delineation of open water features”, International journal of remote
sensing, 17(7), 1425-1432, (1996).
[15] Y. Gu, J.F Brown, J.P Verdin, and B. Wardlow ”A five year analysis of MO-
DIS NDVI and NDWI for grassland drought assessment over the central Great
Plains of the United States.”, Geophysical Research Letters, 34(6),(2007).
[16] Universidad de Murcia, Herramientas de Teledeteccion aplicadas a la
gestion de los recursos hıdricos,”clasificacion”[En linea]. Disponible en:
http://ocw.um.es (2008)
[17] I. Quino, J. Quintanilla, M.E. Garcıa, L. Caceres, ”Determinacion de la cali-
dad fisicoquımica de las aguas subterraneas en la region norte y este del Lago
Poopo,” Revista Boliviana de Quımica, Vol. 23, no 1, p. 48-52, 2006.
[18] Agencia de Servicio Geologico de los Estados Unidos [Online]. Disponible en:
https://www.usgs.gov/
[19] Servicio Nacional de Meteorologia e Hidrologia [Online]. Disponible
en:http://www.senamhi.gob.bo/meteorologia
[20] S.G. Duverger, Rellenado de los gaps provocados por la falla del Scan Line
Corrector en las imagenes Landsat 7 ETM”.
[21] S.C. Goslee, ”et al. Analyzing remote sensing data in R: the landsat package.
Journal of Statistical Software”, vol. 43, no 4, p. 1-25, 2011.

Bibliografıa 102
[22] D. Lu, P. Mausel, E. Brondizio and E. Moran, ”Change detection techniques”,
International journal of remote sensing, vol. 25, p. 2365-2401, 2004.
[23] D. W. Wagener, B. Herbst, ”Face Tracking: An Implementation of the
Kanade-Lucas-Tomasi Tracking Algorithm”, PRASA, South Africa, 2011.
[24] G. Ambrosio, J. Gonzalez and V. Arevalo ”Comparacion de imagenes de
satelite para la deteccion de cambios temporales”, Malaga-Espana, Dpto. In-
genierıa de Sistemas y Automatica. Universidad de Malaga. Disponible en:
http://www. cea-ifac.es, 2009.
[25] D. Riano, J. Salas and E. Chuvieco, ”Correccion atmosferica y topografica,
informacion multitemporal y auxiliar aplicadas a la cartografıa de modelos
de combustibles con imagenes Landsat-TM ”, Tecnologıas Geograficas para el
Desarrollo Sostenible, p. 222-239, 2000.
[26] A. Brizuela, C. Aguirre and I. Velasco, ”Aplicacion de metodos de correccion
atmosferica de datos Landsat 5 para analisis multitemporal”, Ciudad Autono-
ma de Buenos Aires, Argentina, 2007.
[27] Wikipedia, Enciclopedia Libre, Geografıa de Iran [Online]. Disponible en
https://es.wikipedia.org
[28] M. Gonzales-Audicana, R. Garcia, A. Seco,”Fusion de imagenes multies-
pectrales y pancromaticas: nuevas alternativas metodologicas basadas en las
transformaciones wavelet discretas empleando el algoritmo de Mallat”, Revis-
ta de Teledeteccion, vol. 18, p. 63-73, 2002.
[29] M. V. Vieyra, ”Analisis de componentes principales en imagenes de teledetec-
cion”, 2013.
[30] C. G. Cambronero and I. G. Moreno, ”Algoritmos de aprendizaje: knn and
kmeans”, Inteligencia en Redes de Comunicacion, Universidad Carlos III de
Madrid, 2006.
Bibliografıa 103
[31] K. Rokni, A. Ahmad, A. Selamat and S. Hazini, ”Water feature extraction
and change detection using multitemporal Landsat imagery. Remote Sensing”
, 6(5), 4173-4189, (2014).
[32] D. Renza, E. Martınez, A. Arquero and J. Sanchez, ”Drought estimation maps
by means of multidate Landsat fused images. Remote Sensing for Science,
Education, and Natural and Cultural Heritage”, 30, 776-782, (2010).