Embed Size (px)
Citation preview

DINÁMICA NO LINEAL EN ECONOMÍA
UN ANÁLISIS INTRODUCTORIO
Virginia N. Vera de SerioHugo R. Balacco
ResumenEl propósito perseguido por este trabajo es el de presentar un análisis introductorio de los aspectos básicosinherentes a la dinámica no lineal en economía. En la primera parte se discute la modelización dinámica no linealy su relación con los nuevos aportes de la teoría de “caos”. En la segunda parte, se realiza un análisiseconométrico basado en el test BDS y en especificaciones y estimaciones autorregresivas condicionadasheterocedásticas (ARCH) y generalizadas autorregresivas condicionadas heterocedásticas (GARCH). Se concluyesobre la importancia que el tema tiene en varios campos del análisis económico, como por ejemplo modelos conexpectativas racionales, economía de la incertidumbre y econometría de los mercados financieros.
AbstractThe aim of this paper is to present an introduction of the basic features of nonlinear dynamics in Economics. Thefirst part discusses nonlinear dynamics models and their relationships with the new points of view arising from“chaos theory”. In the second part, an econometric analysis based on the test BDS and on autorregresiveconditionally heteroskedastic (ARCH) and generalized autorregresive conditionally heteroskedastic (GARCH)specification is accomplished. Finally, it is argued the importance of this kind of approach in many fields of theeconomic analysis, e.g., models with rational expectations, uncertainty in economics and financial econometrics.
CODIGO JEL : C0

I. Introducción
El propósito perseguido por este trabajo es el de presentar un análisis introductorio de
los aspectos básicos inherentes a la dinámica no lineal en economía. Si bien los economistas
han utilizado modelos dinámicos lineales, éstos son insuficientes para explicar ciertos
fenómenos económicos debiendo recurrirse a la inclusión de variables estocásticas o de
shocks exógenos. La modelización a través de un sistema dinámico no lineal permite, en
cambio, mayor flexibilidad para la adaptación a un comportamiento deseado. No linealidades
pueden producir oscilaciones sostenidas sin recurrir a shocks externos. Más aún, ciertos
sistemas presentan patrones muy complicados que aparentan ser aleatorios; otros son
estructuralmente inestables, dependiendo su comportamiento cualitativo de la evolución de
algunos de sus parámetros. Es esta riqueza en los distintos tipos de comportamiento, así
como el avance tecnológico computacional, lo que ha mostrado la necesidad del estudio de
los sistemas dinámicos no lineales y sus aplicaciones a la economía. El intento de plantear y
analizar modelos económicos no lineales y el de probar series de tiempo disponibles para
evidenciar la existencia de un proceso dinámico determinístico no lineal se refleja en la
actualidad en una creciente literatura (Brock y Dechert (1991), Peitgen, Jürgens y Saupe
(1992), Beker (1994), L. A. Aguirre y A. Aguirre (1995) y sus referencias, entre otros).
Este trabajo está organizado de la siguiente forma: la sección II presenta una breve
introducción a los sistemas dinámicos no lineales; la sección III discute sistemas dinámicos
caóticos. El análisis econométrico (sección IV), se basó, primero, en el test BDS y
posteriormente en la identificación y estimación de modelos regresivos condicionados
heterocedásticos (ARCH) y generalizados autorregresivos condicionados heterocedásticos
(GARCH). Las series temporales seleccionadas son: tasa de inflación (TASANG), tasa de
interés de caja de ahorro a treinta días (TASIN), cotización del dólar libre a precios de octubre
de 1996 (DÓLAR), y la tasa de cambio en el precio del dólar (TASDOL). Los datos, de
frecuencia mensual, cubren un período comprendido entre enero de 1970 y diciembre de
1989.
La selección de las series correspondientes no se efectuó sobre la base de alguna
teoría económica formal, sino más bien con la finalidad de exponer y difundir ciertos aspectos
metodológicos relacionados con el tema de referencia.

2
II. Sistemas Dinámicos No Lineales
El interés por la dinámica de la economía se remonta por lo menos al siglo pasado, L.
Walras ya utilizaba ecuaciones diferenciales ordinarias en 1874. No obstante ello, quien
realmente estableció el uso de las mismas para el análisis de la dinámica de la economía fue
P.A. Samuelson (1947) en su libro Foundations of Economic Analysis. Desde entonces,
tanto las ecuaciones diferenciales como las ecuaciones en diferencias han sido ampliamente
utilizadas por los economistas, fundamentalmente en modelos lineales (o linealizados). Los
sistemas de ecuaciones diferenciales, o en diferencias, lineales, con coeficientes constantes,
son fáciles de manejar. Sin embargo, las limitaciones que estos sistemas lineales imprimen, a
veces los hacen aparecer como insuficientes para comprender la riqueza de la dinámica de la
economía. Es así como, desde la década pasada se ha comenzado a tratar de explicar el
comportamiento, a veces periódico o errático, de algunas variables económicas a través de
modelos determinísticos no lineales. El modelo no lineal de J.R. Hicks (lineal a trozos) que
data de 1950 fue un precursor. Las referencias en L.A. Aguirre y A. Aguirre (1995), V. Beker
(1994), W.A. Brock y W.D. Dechert (1991) y J.Y. Campbell, A. W. Lo y A.C. Mackinlay (1997)
muestran numerosos casos de aplicación de modelos dinámicos no lineales en economía,
siendo la mayoría de los mismos de carácter teórico.
En general no es posible resolver sistemas no lineales, a excepción de algunas
ecuaciones especiales, o bien a través de resoluciones numéricas. A pesar de ello, se puede
tener información cualitativa acerca del comportamiento de la solución lo cual es muchas
veces de interés básico para el economista teórico. Se podría decir que la geometría de las
trayectorias es lo más relevante para llegar a conclusiones económicas.
A efectos de analizar la estabilidad local de un punto de equilibrio es suficiente, bajo
ciertas condiciones, estudiar el comportamiento del sistema lineal obtenido por linealización
de las funciones que aparecen en el modelo no lineal. Un sistema no lineal puede tener
varios puntos críticos de diferentes tipos. El plano de fase puede mostrar distintas zonas de
diferentes propiedades. Las fronteras de estas zonas se denominan separatrices. Cuando el
sistema, lineal o no lineal, involucra uno o varios parámetros puede ocurrir que al variar el
valor de éste pase por un valor crítico, llamado bifurcación, que produce un cambio cualitativo
en la naturaleza de los puntos críticos y las trayectorias. Las siguientes figuras 1-4 tomadas
del libro de L. Perko (1991), muestran algunas de las situaciones que pueden presentarse.

2
Figura Nº 1 Figura Nº 2
Las figuras 1 y 2 corresponden respectivamente, a los sistemas
&
&
x x xy
y y y
= +
= +
2
212
(1)
y
&& sen .x yy x
== (2)
Las trayectorias Γ1 y Γ2 en la figura 2, con los puntos (-π, 0) y (π, 0), forman una separatriz.
Las figuras 3 y 4 muestran cambios estructurales al variar el parámetro µ (µ = 0 es el valor de
bifurcación) y corresponden a los siguientes sistemas, respectivamente,
&&x y xy x y
= − += +
µµ (3)
y
( )( )
& ( )
& ( ) .
x y x x y
y x y x y
= − + + − −
= + + − −
2 2 2
2 2 2
1
1
µ
µ (4)
Figura Nº 3 Figura Nº4

2
Estos dos últimos sistemas son estructuralmente inestables, el primero es lineal mientras que
el segundo no. Para µ > 0 en la figura 4 se observa la existencia de un ciclo límite estable;
en los sistemas lineales nunca puede presentarse esta situación.
Un concepto importante conectado con los sistemas no lineales es el concepto de
atractor. Si & ( )x f x= es un sistema en Rn , en conjunto A en Rn se dice que es invariante si
toda trayectoria solución del sistema que pasa por un punto x A0 ∈ , verifica que toda la
trayectoria está contenida en A. Un conjunto cerrado invariante A es un atractor si:

2
1. existe un entorno abierto U de A tal que toda trayectoria {x(t)} con punto inicial en U
verifica que tiende asintóticamente a A, x(t) → A, cuando t → ∞ ( )( )i e d x t A. . ( ), → 0 ;
2. A contiene una trayectoria densa, lo que hace que A sea “indecomposable”, esto es A no
puede ser separado en dos o más partes desconectadas.
A modo de ejemplo, cualquier punto de equilibrio asintóticamente estable es un atractor. El
ciclo límite estable de la figura 4 con µ > 0 es un atractor.
Un atractor es un atractor extraño si además verifica que contiene:
(i) un conjunto numerable de ciclos de períodos arbitrariamente grande;
(ii) un conjunto no numerable de trayectorias no periódicas.
Las figuras 5 y 6 tomadas de Peitgen et al. (1992), muestran dos ejemplos de atractores
extraños.
Figura Nº 5 Figura Nº 6
Es necesario aclarar que no hay aún unidad de criterio en cuanto a la definición de atractor
extraño y todavía se discute cuál es la definición más apropiada desde el punto de vista

2
matemático. Algunos autores hablan de un atractor extraño cuando se trata de un atractor
con una estructura fractal. Un atractor de un sistema no lineal puede ser así un conjunto
fractal dentro del cual las variables del sistema pasan de un estado a otro en una forma
aparentemente aleatoria, “caótica”. Un sistema dinámico puede tener más de un atractor. El
conjunto de todos los puntos iniciales cuyas trayectorias convergen a un determinado
atractor se denomina la cuenca de atracción. Se han hallado ejemplos de sistemas no
lineales donde la frontera entre cuencas de atracción correspondientes a atractores distintos
es un conjunto fractal. La siguiente figura corresponde a un experimento de la Física con un
péndulo que se mueve sobre tres fuertes imanes modelizado por un sistema de dos
ecuaciones diferenciales no lineales de segundo orden, que posee tres atractores dados por
los imanes. Donde dos cuencas de atracción cualesquiera parecen tocarse, entre ellos
aparece la tercer cuenca de atracción. (Ver figura 7, de Peitgen et al. (1992)). Es claro que es
imposible predecir el estado final de reposo del péndulo (esto es cuál de los tres imanes
finalmente lo atraerá), a partir de su posición inicial, pues un pequeño error en este cálculo
puede invalidar toda la predicción.
Figura Nº 7
III. Caos en economía

2
La sucinta introducción a la dinámica de los sistemas no lineales realizada en la
sección precedente muestra algunas, de la gran variedad existente, de las distintas
situaciones que pueden presentarse. En esta sección se tratará específicamente uno de los
casos posibles: una dinámica caótica. Los métodos relacionados con caos y no linealidad
son bastante nuevos en economía. La mayor parte de los trabajos de investigación en esta
dirección han sido publicados en los últimos diez o doce años.
Con el avance del entendimiento de las dinámicas caóticas por un lado, y con el
reconocimiento, por el otro lado, de que en muchas situaciones son más adecuados los
modelos económicos no lineales, es natural preguntarse si la aparente aleatoriedad que se
observa en distintas series económicas temporales es realmente “aleatoria”, correspondiente
a ruido blanco, o si esta variabilidad obedece a razones intrínsecas debidas a no
linealidades. Diversos autores se han planteado esta pregunta y se han abocado a su
estudio. La mayor parte de ellos ha analizado modelos teóricos que podrían presentar una
dinámica caótica. Desafortunadamente en la literatura se evidencia una falta de
publicaciones donde se contrasta la validez de estos modelos teóricos a través de la
comparación con datos existentes. Un ejemplo de un trabajo en este sentido es el de B.
Finkenstädt y P. Kuhbier (1992) sobre dinámica caótica en mercados agrícolas alemanes con
datos semanales desde 1955 a 1989. Otro ejemplo es Brock y Sayers (1988), que analizaron
datos de Estados Unidos y obtuvieron fuerte evidencia de no-linealidad en (a) producción
industrial, (b) empleo, (c) tasa de desempleo, (d) producción de hierro y (e) Wolfer’s sunspot
numbers.
Ahora bien, se impone la pregunta: ¿qué es caos? En un sentido laxo se podría decir
que por caos se entiende cierto comportamiento errático que parece ser aleatorio pero no lo
es y que además es extremadamente sensible a cambios en las condiciones iniciales de tal
modo que a pesar de ser completamente determinístico hace inútil todo intento de predicción
en el largo plazo. A continuación se tratará de precisar este concepto. Siguiendo a R.
Devaney (1989), se puede considerar que caos queda definido por las siguientes tres
propiedades fundamentales:
(1) sensitividad con respecto a los datos iniciales,
(2) puntos periódicos densos; y

2
(3) transitividad.
Para entender estas condiciones, se analizará un caso particular: la ecuación en diferencias
logística:
x ax xt t t+ = −1 1( ) . (5)
Es éste el ejemplo característico que aparece en casi todos los trabajos donde se introduce
la noción de caos. Se podría haber elegido otro caso alternativo, como la función tienda:
x f xt t+ =1 ( ) , (6)
donde
f xax si xa x si x
( ), , ,
( ) , , ;=
≤ ≤− < ≤
0 0 51 0 5 1
(7)
o la ecuación diferencial
& ( ).x x ax x= + −1 (8)
Se prefirió el ejemplo típico (1) por la sencillez de la ecuación (una “simple” ecuación
cuadrática), y lo complejo de su dinámica para distintos valores del parámetro a. Los gráficos
de la figura 8 muestran las trayectorias correspondientes al punto inicial x0 0 3= , , para
distintos valores de 1 4< ≤a . Se observa que existe un único punto de equilibrio no nulo,
x a a aa = − >( ) / , ( ) ,1 1 el cual resulta ser estable si 1 3< ≤a . Ahora bien, este
modelo no lineal es estructuralmente inestable, pues al variar el valor del parámetro a cambia
cualitativamente la dinámica del sistema a=3 es un valor de bifurcación, aparece un régimen
de duplicación de período. Para a>3, primeramente se presenta la alternancia de
valores de xt entre dos estados distintos, (Fig. 8b) a medida que aumenta a, se pasa de
alternar entre dos estados a alternar entre cuatro estados distintos (Fig. 8c). Esto es la
Figura Nº 8

2
a = 1, 80
0
0,1
0,2
0,3
0,4
0,5
1 4 7 10 13 16 19 22 25 28
a = 3,10
0
0,2
0,4
0,6
0,8
1 5 9 13 17 21 25 29 33 37
a = 3,46
0
0,2
0,4
0,6
0,8
1
1 5 9 13 17 21 25 29 33 37
a = 4
00,20,40,60,8
1
1 8 15 22 29 36 43 50 57 64 71 78
llamada duplicación del período: 20, 21, 22, 23, 24, ... . Cuando el valor de a se acerca a 4, el
comportamiento de xt se vuelve más errático, caótico (Fig. 8d). El siguiente diagrama de
Feigenbaum muestra los valores del parámetro a que producen bifurcaciones:
Figura Nº 9
El así llamado punto de Feigenbaum a = b∞ = 3,5699456 ... es el valor de a que divide la
situación en dos casos esencialmente distintos: a la izquierda se tiene la situación de
duplicación de período, a la derecha la dinámica es caótica. Finalmente, la constante de
Feigenbaum δ = 4,6692 ... da la relación entre las longitudes de dos intervalos consecutivos

2
determinados por puntos de bifurcación. Esta constante se dice universal pues se aplica a
diferentes sistemas.
Para 1<a<3, se tiene un atractor formado por un único punto:
{ }A x aa= < <, .1 3 (9)
Para a>3, el punto xa es un punto de equilibrio inestable y deja de ser un atractor. Para
3<a<b, donde b ≅ 3,4495, se obtiene un atractor formado por un par de puntos (el ciclo de
período 2). Similarmente existe b’>b tal que para b<a<b’, el atractor es un ciclo de período 4,
constituido por cuatro puntos. Esta situación se repite hasta que en el límite de estos valores
b, se llega al punto de Feigenbaum. A partir de allí el atractor es un conjunto denso en algún
subintervalo de [0,1]. Para a=4, el caos gobierna todo el intervalo [0,1].
Veamos a continuación cada una de las condiciones (1), (2) y (3) que caracterizan un
sistema caótico:
1. Sensitividad con respecto a los datos iniciales
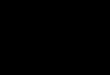
Los siguientes dos gráficos muestran, para a = 4, las trayectorias obtenidas a partir de
x0 0 3= , y de x0 0 300001= , . El tercer gráfico muestra la diferencia x xt t− .
La expresión popularizada para este fenómeno es “efecto mariposa” : el aleteo de una
mariposa en Brasil puede provocar un tornado en Texas. Esto es parte del título de una
conferencia del meteorólogo E. Lorenz que descubrió accidentalmente en 1963 que
pequeñísimos cambios en los valores iniciales de un modelo no lineal, muy simple, de tres
ecuaciones diferenciales utilizado para estudios meteorológicos, producía trayectorias
totalmente diferentes. La figura 5 muestra el atractor, extraño, de Lorenz.
Figura Nº 10

2
0 5 1015 202530
x0 = 0,3
0.20.40.60.81
0 5 1015202530
x0 = 3,00001
0.20.40.60.81
5 10 15 20 25 30
x x−
-1-0.75-0.5-0.250.250.50.75
1
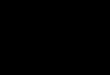
Una observación importante a tener en cuenta es que esta extrema dependencia de
perturbaciones iniciales también puede ocurrir en sistemas lineales, precisamente cuando
éste es no estable. Por ejemplo, el siguiente gráfico muestra la diferencia x xt t− , para
x y x0 0 como antes, y la ecuación lineal x xt t= −10 1 .
Figura Nº 11
Diferencia x-x
0
2000000040000000
6000000080000000
100000000
1 3 5 7 9 11 13 15
x (t) = 10x(t-1)
2. Puntos periódicos densos
Dada la ecuación en diferencias x f xt t= −( )1 , un punto z es un punto periódico si
z f zk= ( ) , para cierto k, k = 1, 2, 3, ... . Aquí f k indica la iteración de la función f k veces, por
ejemplo ( )f z f f z2 ( ) ( ) .= El punto tiene período k si z f zj≠ ( ) para todo 1 ≤ <j k . Si
f: ℜ → ℜ es una función continua y tiene un punto z de período 3, entonces para cada k,
k= 1, 2, 3, ..., existe al menos un punto periódico de período k.
Los sistemas dinámicos caóticos presentan puntos periódicos de todos los períodos y
éstos forman un conjunto denso en el dominio de f.

2
Gráficamente, los puntos periódicos se pueden ver como la intersección de la bisectriz
y = x con la gráfica de y = f k (x). Las siguientes figuras muestran la situación para la
ecuación (1) con a = 4, para k = 1, 2, ..., 6.
Figura Nº 12
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
3. Transitividad
Esta propiedad es llamada “propiedad de barajamiento” por M. de Guzmán (1996),
quien dice: “Las iteraciones de f barajan infinitas veces los intervalos abiertos de [ 0,1] ”.
Esto es, si I y J son dos subintervalos abiertos cualesquiera de [ 0,1], entonces para cada
número natural N0 , existe otro número natural k≥N0 , y existe un punto x en I tal que f xk ( )
es un elemento de J.

2
Las consideraciones anteriores nos llevan a concluir que desde un punto de vista
práctico se plantean dos problemas muy serios al modelar fenómenos económicos a través
de sistemas dinámicos determinísticos no lineales. Uno de estos problemas es la forma
funcional a considerar, pues generalmente la teoría económica no especifica explícitamente
la función o los valores de los parámetros involucrados. El otro problema está relacionado
con la precisión de los datos con que se cuenta; el “efecto mariposa” haría que aún cuando
se tenga un modelo determinístico perfectamente conocido, pequeños errores en las
mediciones podrían producir errores muy grandes de predicción.
Una última observación; no todos los sistemas no lineales tienen un comportamiento
caótico. Esto es, la no linealidad es una condición necesaria, pero no suficiente para la
existencia de caos.
IV. Análisis Econométrico
1. El Test de Brock-Dechert-Scheinkman (BDS)
A pesar de las objeciones ya analizadas el interés por los modelos no lineales
subsiste y se han desarrollado algunos test para determinar si existe evidencia de no
linealidad en datos que aparecen como aleatorios. Los gráficos de la figura 14 muestran,
para tres distintos conjuntos de datos, la trayectoria temporal de xt y los pares (xt-1, xt) en un
diagrama de fase. Se observan tres situaciones esencialmente distintas. El primer caso es
determinístico con un período de rezago, el segundo es aleatorio, mientras que el tercero se
muestra diferente (fue obtenido a partir de un modelo determinístico no lineal con dos
períodos de rezago).
Figura Nº 14

2
10 20 30 40 50
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
10 20 30 40 50
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
10 20 30 40 50
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
Brock, Dechert y Scheinkman diseñaron en 1987 el test (BDS), basados en el
coeficiente de correlación integral de Grassberger y Procaccia, Cm (e). Para su cálculo a
partir de una serie de tamaño T de datos { xt }, sean:
. x x x xtm
t m t t= − + −( , ..., , ) ,1 1 una m-historia, m = 1, 2, 3, ... (10)
. Cm (e, T) = #{(t, s) : ºxmt - xm
s º < e, 1≤ t, s ó T} , (11)
Tm
donde e>0 Tm = T - (m-1), y ºxmt - xm
s º = máx ³xmt-i - xm
s-i ³. Aquí # indica número de 0ó i < melementos.
. Cm (e) = lím Cm (e, T) (12)

2
T → ∞
. vm = Lím log Cm (e) (13)
e↓0 log e
En Campbell y otros (1997) se puede hallar un excelente argumento intuitivo (pág.
477-478) que justifica que
vm = m (14)
si los datos son aleatorios IID (independientes idénticamente distribuidos). En este caso,
límm vm→ ∞ = ∞ . Por otra parte, si los datos no son aleatorios y provienen de un
procesodeterminístico no lineal, entonces este límite es finito. Este valor finito se denomina la
dimensión de correlación. Para nuestra ecuación (1), se verifica que vm = 1 para todo valor
de m.
Grassberger y Procaccia (1983) proponen distinguir los procesos aleatorios IID de los
determinísticos no lineales, calculando vm para diferentes valores crecientes de m y
verificando si crece con m o si converge a algún valor finito. Lamentablemente no se conoce
la distribución de probabilidad de vm cuando los datos son aleatorios. El estadístico BDS
subsana esta deficiencia, pues se sabe que es asintóticamente normal estándar; el mismo
está dado por:
B e T TC e T C e T
e Tmm
m
m
( , )( , ) ( ( , ) )
∃( , ),=
− 1
σ (15)
donde el estimador de la desviación estándar, ∃( , ) ,σm e T se calcula de la siguiente forma (por
conveniencia notacional se omitirá la referencia a “e” y a “T”):
∃ ( , )' ( , ) ,σm m mmC S mC= − −− −1 11 1 (16)
S11 = 4(Q - C2), (17)

2
S Q C Q C Cm m m j j m
j
m
222 2 2
1
1
4= − + −−
=
−
∑( ) ( ),σ (18)
S S Q Q QC C C
QC Q C C C S S
m m m
m m j j m m
j
m
12 211 2
1 2 1 211 22
1
1
2 2
4 0 5
= = + + − + +
+ − − − +
−
− − +
=
−
∑
( ( ) )
( ) , ( ) ,
(19)
[ ]C E I X X C ee i j= =( , ) ( ),1 (20)
[ ]Q E I X X I X Xe i j e j k= ( , ) ( , ) , (21)
Ie (X, Y) es la función indicadora del suceso {x-y< e}.
Brock, Dechert y Scheinkman mostraron que bajo la hipótesis nula de datos IID, se tiene que
Cm(e) = C1(e)m para cualquier m, y que Bm → N(0, 1) cuando T→ ∞ . Cuando se rechaza la
hipótesis nula, se acepta que existe evidencia de no linealidad, lo cual no es necesariamente
sinónimo de caos. Por otra parte, un rechazo de la hipótesis nula, no necesariamente es
evidencia de no linealidad en la media, sino, más bien, se trata de no linealidad en varianza.
El análisis empírico se ha desarrollado sobre la base de datos mensuales, para el
período 1976:1 a 1989:12, correspondientes a las siguientes series:
TASIN: tasa de interés efectiva mensual caja de ahorro. Fuente: CARTECO.
TASANG: tasa de inflación mensual, Indice de precios consumidor Capital Federal Nivel
General, año base 1988=100. Fuente: INDEC.
DÓLAR: dólar libre a octubre de 1996. Fuente: CARTECO.
TASDOL: tasa de cambio del dólar libre. Fuente: Elaboración propia sobre la base de la
variable DÓLAR.
La información utilizada en el test BDS, cuadro Nº 2, son los residuos
correspondientes a las estimaciones AR(1) de las series de referencia. Los resultados de

2
dichas estimaciones se encuentran en el cuadro Nº1. Los coeficientes estimados
consignados son todos significativos de acuerdo a la prueba t convencional, con excepción
del intercepto correspondiente al modelo estimado para la variable TASDOL.
CUADRO Nº 1: Estimación de modelos AR(1). Período de Estimación 70:1-89:12
Serie ConstanteCoeficiente
autorregresivoNivel de Significación
de Q
TASANG 0.1105664 0.6632251 0.998TASIN 7.492503 0.794656 0.198DÓLAR 2.631542 0.898492 0.999TASDOL 0.008433 0.135219 0.984
CUADRO Nº 2: Resultados del Test BDS
Residuos AR(1)de las Series
Valores de e Mínimo Máximo
Porcentaje deaceptación
de no linealidad
TASANG 0,04 0,4 90 TASIN 0,5 5 56 TASDOL 0,05 0,95 86 DÓLAR 0,2 2 28
Observación: Se realizaron 50 experimentos para cada serie, con valores dem (dimensión), desde 2 hasta 6.
2. Modelos ARCH y GARCH
Tal como lo han puntualizado Campbell, Lo and Mackinlay (1997), el poder del test
BDS debe entenderse directamente relacionado con modelos no lineales en varianza más
bien que con procesos no lineales en la media. Por lo tanto, el rechazo de la hipótesis nula
no necesariamente implica que la serie temporal tiene una media condicional que varía en el
tiempo, sino más bien que podría tratarse de una varianza condicional no constante.

2
Básicamente, los modelos autorregresivos condicionados heterocedásticos (ARCH) y
los generalizados autorregresivos condicionados heterocedásticos (GARCH) se especifican
con la finalidad de captar no linealidades en varianza. El uso de estos modelos es muy
común para analizar datos provenientes de mercados financieros (“nonlinearities in financial
data”).
Una representación general que contempla la posibilidad de relacionar una variable
con una estructura no lineal en términos de shocks en la siguiente:
x ft t t t= − −( , , , ...)ε ε ε1 2 (22)
Esta especificación, de carácter general puede formalizarse en otra más restringida
del tipo:
x g ht t t t t t= +− − − −( , , ...) ( , , ...)ε ε ε ε ε1 2 1 2 (23)
La función g(.) representa la media condicional de x términos de la información
pasada. Por otra parte, desde que [ ]E x E x ht t t t t t− − − −− =1 12
1 22( ( ) ( , , ...)ε ε , modelos con
g(.) no lineal son denominados no lineales en la media; mientras que modelos con h(.)2 no
lineal se denominan modelos no lineales en varianza. Un proceso simple de media móvil no
lineal puede expresarse como:
xt t t= + −ε αε 21 (24)
en donde, g y ht(.) (.)= =−αε 21 1. Es un modelo no lineal en la media solamente. El
modelo autorregresivo condicional heterocedástico de primer orden (ARCH (1)), propuesto
por Engle (1982), toma la forma general siguiente:
xt t t= −ε αε 21 (25), ó
xt t t= + −ε α α ε0 12
1 (26)

2
en donde g y h en ó h ent t(.) (.) ( ) (.) ( )= = = +− −0 25 2621 0 1
21αε α α ε .
Además, Engle (1982) en su contribución original considera la extensión del modelo
ARCH (1) a una clase más general de modelos autorregresivos generalizados
heterocedásticos, el proceso ARCH (q):
xt t o i ti
q
= + −=∑ε α α ε 2
11
(27)
Por otra parte, Ballerslev (1986) generaliza el trabajo original de Engle permitiendo la
posibilidad de un proceso ARMA para la varianza condicional, el modelo generalizado
autorregresivo condicional heterocedástico, GARCH. El caso especial del modelo GARCH
(1, 1) se puede escribir:
x ht t= ε (28)
en donde h ht t t= + +− −α α ε α0 12
1 2 1 . Una generalización se obtiene en forma directa a
través del modelo GARCH (p, q). En este caso:
h i ht t i t ii
p
i
q
= + +− −==∑∑α αε β β0
2
11 (29)
Como ha señalado Enders (1995), el uso de un modelo GARCH posee ciertas
ventajas, desde que un proceso ARCH de alto orden puede simplificarse a través de una
representación GARCH mucho más parsimoniosa y más sencilla de identificar y estimar.
CUADRO Nº 3: Modelos AR(1)xARCH(1). Período de Estimación: 70:02-89:12.
SerieParámetros AR(1)
φ0 φ1
Parámetros ARCH(1) αo α1

2
TASANG 0.022509 0.736999 0.0020315 0.73184579 TASIN 0.49736228 0.7814328 0.3334374 2.4599441 TASDOL 0.0583561 0.52188569 0.0551984 -0.099842801 DÓLAR 0.0255900 0.9773965 0.0.0278805 1.9550726
CUADRO Nº 4: Modelos AR(1)xGARCH(1). Período de estimación: 70:02-89:12
SerieParámetros AR(1)
φ0 φ1
Parámetros GARCH(1, 1) α0 α1 α2
TASANG 0.0170842 0.8078109 0.0006026 0.895780 0.1571391 TASIN -0.0183368 1.02619676 0.3554448 1.3131394 0.056228 TASDOL 0.00225572 0.18145571 0.0004535 2.2657303 0.77967141 DÓLAR -0.0382084 1.02208537 0.0007409 0.5350895 0.6851239
El cuadro Nº3 incluye las estimaciones de modelos ARCH(1) para los residuos AR(1)
correspondientes a las series TASANG, TASIN, TASDOL y DÓLAR. Los parámetros son
todos significativos de acuerdo a la prueba t convencional.
Por otro lado, el cuadro Nº4 resume los resultados de las estimaciones de los
parámetros de modelos GARCH(1, 1), realizadas sobre los residuos AR(1) de las series de
referencia. Como en el caso anterior, todos los parámetros estimados resultaron
significativos.
Desde que la suma de los coeficientes autorregresivos y de media móvil de los
modelos GARCH es mayor que uno, se trata de procesos no estacionarios. En este caso, la
presencia de una raíz unitaria implica que la volatilidad actual afecta el pronóstico de la
volatividad en un futuro indefinido. Estos procesos son denominados integrados
generalizados autorregresivos condicionados heterocedásticos o IGARCH(1, 1). Nelson
(1990), advierte que la analogía entre un proceso “camino aleatorio” con tendencia y uno del
tipo IGARCH(1, 1) debe ser tratado con cautela. Un camino aleatorio lineal es no estacionario
en un doble sentido, es estrictamente no estacionario y además es no estacionario en
covarianzas; mientras que un proceso IGARCH(1, 1) es estrictamente estacionario, pero no
es estacionario en covarianzas.

2
V. Conclusiones
La gran mayoría de modelos económicos y econométricos utilizados en forma masiva
hasta los finales de la década de los ochenta han sido desarrollados, básicamente en un
contexto lineal. Sin embargo, muchos aspectos del comportamiento económico pueden
considerarse no lineales. Más aún, la frontera natural para una econometría inherente a
mercados financieros (financial econometrics), es la modelización no lineal de las variables
involucradas. Además, la dinámica no lineal en economía, análisis no lineal de modelos de
series temporales, redes neuronales aritificiales (“neural networks”) y muchos aspectos
relacionados con “caos” en economía, han despertado un interés creciente por parte de
algunos investigadores a partir de los años noventa. Por otra parte, la metodología ARCH y
GARCH, univariante y multivariante, ha adquirido un auge reciente como instrumento
adecuado para especificar y estimar modelos de volatilidad estocástica. Los modelos
vinculados con el precio de los activos en mercados financieros relacionan la prima de riesgo
con el retorno esperado y con la varianza del retorno. En otros términos, las especificaciones
teóricas que usan la varianza como medida del riesgo, deben ser testados usando la
varianza condicional.
Por último, cabe destacar que las observaciones anteriores deben hacerse extensivas
al contexto economía de la incertidumbre, como así también en modelos que utilizan
expectativas racionales, dado que racionalidad supone, por parte de los agentes
económicos, pronósticos basados en la media y varianza condicional por oposición a
momentos incondicionales.
VI. Bibligrafía
1. Aguirre, L. A. y Aguirre, A., “A tutorial introduction to nonlinear dynamics in Economics”, Texto paradiscussão Nº88, Univ. Federal de Minas Gerais, Brasil, 1995.
2. Beker, V. A., “Economic Nonequilibrium, Instability and Chaos”, XXIX Reunión anual de la
Asociación Argentina de Economía Política, FCE, Universidad Nacional de la Plata, Tomo 2, LaPlata, 1994.
3. Bollerslev, T., “Generalized Autoregressive Conditional Heteroskedasticity”, Journal of
Econometrics, 31, 307-327, 1986.

2
4. Brock, W. A. y Dechert, D. W., “Non-linear dynamical systems: instability and chaos in economics”,
Handbook of Mathematical Economics, Vol. 4, 2210-2235, Amsterdam, 1991. 5. Brock, W. A. y Malliaris, A., Differential equations, stability and chaos in dynamic economics,
Amsterdam, Elsevier, 1989. 6. Campbell, J. Y., Lo, A., W., Mackinlay, A., C., Econometries of Financial Markets, Princeton
University Press, 1997. 7. Enders, W., Applied Econometric Time Series, John Wiley and Son. Inc., 1995. 8. Engle, R., “Autoregressive Conditional Heteroskedasticity with Estimates of the Variance of UK
Inflation”, Econometrica, 50, 987-1008, 1982. 9. Finkenstädt, B. y Kuhbier, P., “Chaotic Dynamics in Agricultural Markets”, Annals of Operations
Research, Vol. 37, Nº2, 73-96, Basel, 1992. 10. Hsieh, D., “Testing for Nonlinear Dependence in Daily Foreign Exchange Rates”, Journal of
Business, 62, 339-368, 1989. 11. Hsieh. D., “Chaos and Nonlinear Dynamics: Application to Financial Markets,” Journal of Finance,
46, 1839-1877, 1991. 12. Lo, A., and A. C. MacKinlay, “Stock Market Prices Do Not Follow Random Walks: Evidence from a
Simple Specification Test”, Review of Financial Studies, 1, 41-66, 1988,. 13. Nelson, D., “Stationarity and Persistence in the GARCH (1, 1) Model”, Econometric Theory, 6, 318-
334, 1990. 14. Peitgen, H., Jürgens, H. y Saupe, D., Chaos and Fractals. New Frontiers of Scienc, New York,
Springer-Verlag, 1992. 15. Perko, L., Differential Equations and Dynamical Systems, Springer-Verlag, 1991. 16. Weiss, M. D., “Nonlinear and chaotic dynamics: an economist’s guide”. The Journal of Agricultural
Economics Research, Vol. 43, Nº3, 2-17, 1991.