Embed Size (px)
Citation preview

Diseño y estudio de una hélice encerrada por
un anillo aerodinámico
Proyecto de Grado
Autor:
Juan Francisco Hurtado Pérez
Asesor:
Álvaro Enrique Pinilla Sepúlveda
Universidad de los Andes
Facultad de Ingeniería
Departamento de Ingeniería Mecánica
Bogotá D.C, Colombia
Julio 2019

Agradecimientos
El desarrollo de este proyecto no hubiese sido posible sin el apoyo de varios de mis colegas y
compañeros de carrera. A ellos, gracias por las ideas aportadas y la ayuda mutua en múltiples tomas
de datos. Gracias también a los técnicos de los laboratorios de Mecánica de Fluidos y Manufactura
por su labor, disposición para ayudar y entrega de consejos profesionales.
Gracias al profesor Álvaro Pinilla por los conocimientos impartidos en varias clases de la carrera, en
especial el curso de Aerodinámica Básica y por su asesoría en el transcurso del proyecto.
Profundo agradecimiento a mi madre en todos estos años por su apoyo, el trabajo, tiempo y dinero
invertidos en mi educación superior, al resto de mi familia y a mis amigos por acompañarme en el
camino a la vida profesional.

1
Contenido
I. Lista de Figuras y Tablas ............................................................................................................ 2
II. Nomenclatura .............................................................................................................................. 4
III. Resumen ...................................................................................................................................... 5
IV. Introducción ................................................................................................................................ 5
V. Objetivos ..................................................................................................................................... 6
VI. Marco Teórico ............................................................................................................................. 7
1. Estado del arte ......................................................................................................................... 7
2. Diseño de equipos aerodinámicos: Método del Elemento del Aspa ....................................... 7
VII. Diseño de la Hélice ................................................................................................................... 13
1. Método de diseño para el anillo ............................................................................................ 13
2. Diseño a manera de ventilador axial ..................................................................................... 13
3. Diseño del anillo.................................................................................................................... 16
4. Punto de operación y desempeño teórico .............................................................................. 16
5. Diseño para manufactura y modelo CAD ............................................................................. 17
6. Sistema de propulsión ........................................................................................................... 17
VIII. Manufactura y Ensamble ........................................................................................................... 18
IX. Pruebas Experimentales ............................................................................................................ 19
1. Metodología .......................................................................................................................... 19
2. Equipos y montaje ................................................................................................................. 20
3. Resultados ............................................................................................................................. 22
X. Discusión de Resultados ............................................................................................................ 30
XI. Conclusiones ............................................................................................................................. 31
XII. Recomendaciones ...................................................................................................................... 32
XIII. Trabajo Futuro ........................................................................................................................... 32
XIV.Referencias y Bibliografía ......................................................................................................... 33
XV. Anexos ....................................................................................................................................... 35

2
I. Lista de Figuras y Tablas
Figura 1. Diagrama de cuerpo libre sobre un perfil aerodinámico. Adaptado de [9]. ......................... 7 Figura 2. Ejemplo de diagrama 𝐶𝐿 vs 𝛼. Tomado de [10]. ................................................................. 8 Figura 3. Diagrama de cuerpo libre sobre un elemento de aspa de una hélice. Adaptado de [11]. ... 10 Figura 4. Distribución de cuerda como función de la posición radial respecto al centro de la hélice
(eje x) y al punto de cuarta cuerda (eje y). ........................................................................................ 15 Figura 5. Variación del ángulo de calaje entre la raíz y la punta de las aspas................................... 16 Figura 6. Modelo CAD de la hélice diseñada. .................................................................................. 17 Figura 7. Despiece y ensamble de la hélice....................................................................................... 18 Figura 8. Soporte para el montaje experimental. ............................................................................... 21 Figura 9. Balanceo del conjunto de aspas. ....................................................................................... 22 Figura 10. Montaje experimental. ..................................................................................................... 22 Figura 11. Resultados MA-G/F 8x4. Comportamiento dinámico en función del tiempo. ................ 23 Figura 12. Resultados MA-G/F 8x4. Comportamiento dinámico en función del tiempo. ................ 23 Figura 13. Resultados MA-G/F 8x4. Coeficiente de empuje. ........................................................... 24 Figura 14. Resultados MA-G/F 8x4. Coeficiente de Potencia. ......................................................... 24 Figura 15. Resultados MA-G/F 8x4. Eficiencia. ............................................................................... 25 Figura 16. Resultados MA-G/F 8x4. Aproximación del Re. ............................................................. 25 Figura 17. Resultados de la hélice diseñada. Comportamiento dinámico en función del tiempo con
soporte original. ................................................................................................................................. 26 Figura 18. Resultados de la hélice diseñada. Comportamiento dinámico en función del tiempo con
soporte modificado. ........................................................................................................................... 26 Figura 19. Resultados de la hélice diseñada. Coeficiente de empuje con aire estático. .................... 27 Figura 20. Resultados de la hélice diseñada. Coeficiente de empuje con viento. ............................. 27 Figura 21. Resultados de la hélice diseñada. Coeficiente de potencia con aire estático. .................. 28 Figura 22. Resultados de la hélice diseñada. Coeficiente de potencia con viento. ........................... 28 Figura 24. Resultados de la hélice diseñada. Aproximación del Re. ................................................ 29 Figura 23. Resultados de la hélice diseñada. Eficiencia. ................................................................... 29
Tabla 1. Algoritmo de diseño de un ventilador axial teniendo por dados el diámetro del rotor, el
caudal, el cambio de presión del flujo y el número de aspas; junto con la densidad y viscosidad del
fluido. Adaptado de [9]. .................................................................................................................... 12 Tabla 2. Algoritmo de diseño del anillo. ........................................................................................... 13 Tabla 3. Parámetros de diseño iniciales para la hélice, en condiciones atmosféricas de Bogotá (𝜌 =
0.9 𝑘𝑔/𝑚3, 𝑣 = 2 × 10 − 5𝑚2/𝑠) .................................................................................................. 14 Tabla 4. Parámetros de diseño definitivos para la hélice, en condiciones atmosféricas de Bogotá
(𝜌 = 0.9 𝑘𝑔/𝑚3, 𝑣 = 2 × 10 − 5𝑚2/𝑠). ........................................................................................ 14 Tabla 5. Características del perfil aerodinámico Gö 417A. Para mayor detalle consúltese el Anexo
2. ........................................................................................................................................................ 15 Tabla 6. Características del perfil aerodinámico E387. Para mayor detalle consúltese el Anexo 3. . 16 Tabla 7. Desempeño teórico de la hélice en el punto de diseño. ....................................................... 16 Tabla 8. Características del motor A2212/10T. ................................................................................ 18 Tabla 9. Propiedades de los materiales evaluados para la hélice. Se muestran los datos de [18] y
[19]. Múltiples fuentes que, en general, el PLA tiene mayor resistencia que el ABS aunque esto
varía según el tratamiento dado al material. ...................................................................................... 18 Tabla 10. Conjunto de variables controladas y sus magnitudes durante las pruebas experimentales.
........................................................................................................................................................... 19

3
Tabla 11. Conjunto de variables dependientes. ................................................................................. 20 Tabla 12. Accesorios y especificaciones del banco de pruebas comercial RC Benchmark 1580®. . 20 Tabla 13. Dispositivos de experimentación adicionales. .................................................................. 21

4
II. Nomenclatura
a : Factor de interferencia axial Δ𝑃 : Cambio de Presión
a' : Factor de interferencia rotacional Q : Caudal
AR : Relación de aspecto r : Posición radial
B : Envergadura R : Radio del rotor
B : Número de aspas S : Área de superficie
𝐶𝐷 : Coeficiente de arrastre T : Momento Par
𝐶𝐿 : Coeficiente de sustentación Th : Empuje
𝐶𝑃 : Coeficiente de potencia 𝑈∞ : Velocidad de flujo libre
𝐶𝑇 : Coeficiente de momento par 𝑈𝑡 : Componente tangencial de la
velocidad inducida
𝐶𝑇ℎ : Coeficiente de empuje 𝑈𝑥 : Componente axial de la velocidad
inducida
d : Fuerza de arrastre por unidad de
longitud V : Velocidad
D : Diámetro del rotor 𝛼 : Ángulo de ataque
𝐹𝑡 : Componente tangencial de fuerza
en un elemento de aspa 𝛽 : Ángulo de calaje
𝐹𝑥 : Componente axial de fuerza en un
elemento de aspa Δ : Diámetro específico
𝑔 : Aceleración gravitacional 𝜂 : Eficiencia
l : Fuerza de sustentación por unidad
de longitud 𝜙 :
Ángulo de incidencia relativo al
aspa
𝐽 =𝑈∞
𝑛𝐷 : Relación de avance 𝜌 : Densidad del aire
m : Masa 𝜉 : Estación radial
n : Velocidad de giro [Hz] 𝜈 : Viscosidad cinemática
Ns : Velocidad específica Ω : Velocidad angular
P : Potencia mecánica
𝑃𝑒𝑙𝑒 : Potencia eléctrica
PMO : Punto de mejor operación
Subíndices
d : Arrastre
l : Sustentación

5
III. Resumen
La industria de los drones está en constante crecimiento desde hace más de una década, suscitando
interés en la investigación de equipos aerodinámicos relacionados con ellos. Basándose en los
parámetros de operación de un dron comercial, se diseñó una hélice encerrada por un anillo
aerodinámico con el algoritmo de diseño de un ventilador axial y se probó su desempeño. El montaje
experimental tuvo dificultades debido, principalmente, a la magnitud de la vibración producida por
la hélice en operación, y fue imposible tomar datos a la velocidad de giro y número de Reynolds del
punto de diseño. Sin embargo, los resultados hallados a bajas velocidades muestran un buen
rendimiento, alcanzando una eficiencia de hasta 60.5% y un 𝐶𝑇ℎ superior al del punto de diseño y al
de una hélice comercial de diámetro semejante, con una incertidumbre relativa promedio del 8.00%.
También se encontraron tres regímenes del Re en los cuales la eficiencia es más alta, intermedia o
baja relativa a los valores hallados.
IV. Introducción
Pensando en un dron como sinónimo de vehículo aéreo no tripulado (UAV por sus siglas en inglés),
los drones existen desde el siglo XIX, siendo la industria militar la que estuvo a la vanguardia del
desarrollo de estos vehículos aéreos a nivel global. Hacia 1916, en Inglaterra se elaboraron varios
prototipos de UAV para su uso en la Primera Guerra Mundial, uso que finalmente no tuvo lugar.
Luego, durante la Segunda Guerra Mundial y posterior Guerra Fría existieron avances importantes,
pero cuya escala no alcanzó la que vivían en ese momento los vehículos aéreos tripulados. Solamente
hasta 1982, cuando el ejército de Israel utilizó una serie de UAV con fines tácticos en su guerra contra
Siria fue cuando, puede decirse, empezó la era moderna de los drones. [1]
Entrado el siglo XXI, en el año 2006 comenzó el uso comercial de estos equipos en países como
Estados Unidos. Allí, la Federal Aviation Administration (FAA) expidió el primer permiso para el
uso de pequeños UAV por parte de los sectores público y privado. Al mismo tiempo, el uso de los
drones empezaba a crecer y diversificarse en todo el mundo. Un estudio del portal de actualidad
financiera, Business Insider, identifica el crecimiento de su uso comercial en el país anglosajón. Éste
fue de 19% en la representación del mercado frente al 5% de crecimiento de su uso en la industria
militar, y en aplicaciones que van desde la producción audiovisual hasta el servicio de internet.
Adicionalmente, el uso de drones en el sector agropecuario también ha visto una gran expansión. En
Japón, por ejemplo, ya los empleaban en la producción de arroz, para tareas como el riego, estudio
de suelos, vigilancia, estudios climáticos y más. [2]
En Colombia, la industria del dron es también materia de interés para algunos sectores privados y
públicos. El director de la Colombia Dron Expo, Wilson Ospina, afirmó en 2017 que “Colombia está
al nivel de muchos países desarrollados en el tema de drones porque hay emprendedores, grupos de
investigación y adelantos en temas de seguridad y defensa” [3]. Inclusive, tiene el potencial de ser el
primer país suramericano en tener una industria de fabricación en serie de aeronaves no tripuladas.
[4] Existen varios ejemplos del uso de drones en el país. El ingeniero electrónico José Gregorio
Morales, fabrica drones brindando al cliente la capacidad de desarrollar y personalizar aplicativos
utilizando la plataforma de programación Raspberry Pi. [5] El Estado, en cabeza de la Corporación
de la Industria Aeronáutica Colombiana (CIAC), el Ministerio de Defensa y Ecopetrol ha llevado a

6
cabo los proyectos Coelum, Quimbaya y Atlante 2 (este último apoyado también por la compañía
europea Airbus) para el diseño de UAV con fines militares. [4] A pesar de esto, en Colombia existe
la necesidad de que se concrete un Espacio Aéreo Integrado a partir de regulaciones de la Aeronáutica
Civil [3], de manera similar a la FAA en Estados Unidos.
Los avances de los pequeños UAV hacen necesaria la búsqueda de diversas maneras de mejorar y
comprender su desempeño en aplicaciones variadas. El enfoque de este proyecto apuntó al desarrollo
de una hélice dinámicamente similar a las empleadas por drones.
V. Objetivos
Objetivo general: observar el desempeño aerodinámico de una hélice fabricada aplicando el diseño
de ventiladores axiales.
Objetivos Específicos:
• Realizar el diseño de una hélice óptima aplicando las etapas de diseño de un ventilador axial e
incluyendo un anillo a su alrededor cuyo perfil sea aerodinámico.
• Fabricar la hélice diseñada.
• Adaptar y utilizar un banco de pruebas para la medición del momento par, empuje y potencia de
la hélice fabricada en el punto de diseño.
• Obtener las curvas de desempeño de la hélice diseñada, compararlas con las de una hélice
comercial y evidenciar mayor coeficiente de empuje en el punto de mejor operación.

7
VI. Marco Teórico
1. Estado del arte
La preocupación por el mejoramiento de la eficiencia de equipos y cuerpos aerodinámicos ha
suscitado la invención de varias soluciones para alas de avión, hélices, ventiladores, etc. En 1976,
Richard Wihtcomb, en el Centro de Investigación Langley de la NASA implementó y realizó pruebas
de alas con punta modificada (winglets), y obtuvo un incremento del 9% en la tasa de sustentación
contra arrastre, 𝐶𝐿/𝐶𝐷. [6] Otro estudio interesante fue el realizado por Andreas Ommundsen [7] en
su tesis de maestría de la Universidad Noruega de Ciencia y Tecnología (NTUN), quien implementó
este mismo concepto de punta de ala modificada sobre las aspas de una hélice de barco. Ommundsen
condujo un análisis computacional que arrojó un incremento del empuje de 40.3%, a coste de una
disminución del 8.7% en la eficiencia aerodinámica, comparada con una hélice diseñada sin
modificaciones en la punta. Otra aproximación, en busca del aumento de la fuerza de empuje, ha sido
construir un ducto estático alrededor de la hélice. Esta solución genera un aumento en la eficiencia
aerodinámica respecto a hélices abiertas. Sin embargo, estudios como el de Yilmaz et al. [8] muestran
que esta mejoría tiene un límite, asociado a la relación de avance (J). Por encima de una J particular,
el ducto tiende a frenar la propulsión (en su estudio fue para 𝐽 = 0.35).
Varios conceptos técnicos relacionados al diseño y rendimiento de equipos aerodinámicos se han
mencionado, y se explican en líneas siguientes.
2. Diseño de equipos aerodinámicos: Método del Elemento del Aspa
Para comenzar, es importante presentar los aspectos físicos generales de un perfil aerodinámico. La
Figura 1 muestra un perfil y las fuerzas que actúan sobre él cuando incide un flujo con velocidad 𝑈∞
a un ángulo 𝛼, denominado ángulo de ataque.
Figura 1. Diagrama de cuerpo libre sobre un perfil aerodinámico. Adaptado de [9].
Visto desde un marco de referencia opuesto, es el perfil el que se desplaza por el fluido tal que la
velocidad relativa del flujo incidente es 𝑈∞ a un ángulo 𝛼 respecto a la línea de cuerda (la línea recta
más larga entre la nariz y la cola del perfil) [9]. Entonces, el fluido ejerce sobre el perfil una fuerza
aerodinámica r cuyas componentes son una fuerza de sustentación (l) y fuerza de arrastre (d). Estas
fuerzas son producto de dos zonas con diferente distribución de presión generadas por la interacción

8
del flujo y el perfil. La sección de baja presión es el extradós y la de alta presión, el intradós. Vistas
en la Figura 1 corresponden al borde superior e inferior, respectivamente (la fuerza resultante r va
hacia arriba, como consecuencia de una presión neta en esta dirección).
En el análisis dinámico de estos fenómenos se utilizan números adimensionales que relacionan las
fuerzas presentes, 𝑈∞, la geometría (cuerda del perfil en dos dimensiones -c- o área superficial del
ala, aspa o álabe en tres dimensiones -S-), 𝛼 y algunas propiedades físicas del fluido. Estos números
son los coeficientes de arrastre (𝐶𝐷), sustentación (𝐶𝐿), momento (𝐶𝑚) y el Número de Reynolds (Re).
𝐶𝐿 =𝑙
12
𝜌𝑉2𝑐
Ecuación 1
𝐶𝐷 =𝑑
12
𝜌𝑉2𝑐
Ecuación 2
𝑅𝑒 =𝜌𝑈∞𝑐
𝜇
Ecuación 3
𝐶𝑚 =𝑚
12
𝜌𝑈∞2 𝑐2
Ecuación 4
Nótese que las fuerzas en la Figura 1 fueron definidas en un punto específico. Éste es el punto de
“cuarta cuerda” o el 25% de c. Se ha demostrado que en esta posición se ubica el centro de presiones
de un perfil aerodinámico y es posible concentrar allí las fuerzas en un diagrama de cuerpo libre.
Figura 2. Ejemplo de diagrama 𝐶𝐿 vs 𝛼. Tomado de [10].
Cada uno de estos coeficientes, por definición, varía en función del ángulo de ataque 𝛼, y su relación
se describe en la Teoría de la Línea de Sustentación de Prandtl, tanto para dos como tres dimensiones.
En dos dimensiones se tiene una situación ideal, mientras que en tres dimensiones, existe una
diferencia en los ángulos de ataque. La teoría indica que el cambio en 𝛼 y 𝐶𝐷 tridimensionales para
un 𝐶𝐿 dado es, respectivamente
𝛼3𝐷 − 𝛼2𝐷 = 𝛥𝛼 =𝐶𝐿
𝜋 ⋅ 𝐴𝑅
Ecuación 5
𝐶𝐷(3𝐷) − 𝐶𝐷(2𝐷) = 𝛥𝐶𝐷 =𝐶𝐿
2
𝜋 ⋅ 𝐴𝑅
Ecuación 6
Donde AR es la relación de aspecto o esbeltez del ala y b su envergadura:

9
𝐴𝑅 =𝑏2
𝑆≈
𝑏
𝑐
Por otra parte, la relación entre 𝐶𝐿 y 𝐶𝐷 suele expresarse para describir el grado de rendimiento
aerodinámico de un perfil: 𝐶𝐿/𝐶𝐷. El valor máximo indica el punto de mayor rendimiento del perfil
a un 𝛼 denominado ángulo de planeo.
Otro rasgo de los perfiles aerodinámicos que incide en su dinámica es su simetría respecto de una
curva central, representada por la línea punteada en la Figura 1. Cuando esta curva es una recta, el
perfil es simétrico y no experimenta sustentación cuando 𝛼 = 0. Mientras que, si la curva tiene
combadura (como en la Figura 1), el perfil no es simétrico y puede experimentar sustentación cuando
𝛼 = 0.
Tomando en cuenta esta teoría, el principio de diseño de máquinas aerodinámicas es la discretización
de la sección transversal de sus aspas. Se utiliza un elemento de perfil aerodinámico sobre el cual se
plantean las ecuaciones dinámicas en función de la posición radial y, una vez resuelta la dinámica,
para un número entero de posiciones o estaciones radiales se obtiene el desempeño teórico del equipo
y la geometría de sus aspas.
Existen varios métodos de diseño basados en este principio. Para este estudio, se utilizó el Método
del Elemento del Aspa del cual se puede encontrar mayor detalle en las referencias [9] y [11]. Este
método predetermina dos condiciones básicas. Primero, se asume que el flujo sucede en tubos de
corriente por lo que elementos de aspa adyacentes no interfieren entre sí, y segundo, la cuerda del
aspa es pequeña a comparación de su envergadura, por lo cual la distribución de presión sobre el
perfil en 3D se asume idéntica a la del perfil en 2D y se puede trabajar con los coeficientes
aerodinámicos bidimensionales.
Para cuantificar y comparar el desempeño de equipos aerodinámicos también existen números
adimensionales. En el caso del estudio presente, serán de interés los coeficientes de empuje, momento
par, potencia, relación de avance y eficiencia. Las ecuaciones que relacionan cada uno con los
parámetros de operación del equipo son, respectivamente [12]:
𝐶𝑇ℎ =𝑇ℎ
𝜌𝑛2𝐷4
Ecuación 7
𝐶𝑇 =𝑇
𝜌𝑛2𝐷5
Ecuación 8
𝐶𝑃 =𝑃
𝜌𝑛3𝐷5= 2𝜋𝐶𝑇
Ecuación 9
𝐽 =𝑈∞
𝑛𝐷
Ecuación 10
𝜂 = 𝐽𝐶𝑇ℎ
𝐶𝑃= 𝐽
𝐶𝑇ℎ
2𝜋𝐶𝑇
Ecuación 11
A continuación, se describirá el procedimiento de diseño para una hélice abierta y para un ventilador
axial. Como se verá, el ventilador tendría una eficiencia aerodinámica mayor a la de la hélice, para
condiciones de operación similares.
2.1 Diseño Óptimo de una hélice
La Figura 3 muestra el diagrama de cuerpo libre de un elemento de aspa para una hélice. A partir del
conjunto de fuerzas y velocidades que actúan sobre el elemento, se pueden obtener las ecuaciones de
diseño. En forma general las fuerzas de sustentación y arrastre por unidad de longitud (en dos
dimensiones) se definen así:

10
𝑑𝑙 =1
2𝜌𝑉2𝑐𝐶𝐿 [
𝑁
𝑚]
Ecuación 12
𝑑𝑑 =1
2𝜌𝑉2𝑐𝐶𝐷 [
𝑁
𝑚]
Ecuación 13
Figura 3. Diagrama de cuerpo libre sobre un elemento de aspa de una hélice. Adaptado de [11].
Ahora, como consecuencia de la interacción del flujo y el perfil, se generarán una serie de vórtices a
lo largo de envergadura del ala, de acuerdo con la Teoría de la Línea de Sustentación. Sobre un
elemento, esto genera que la velocidad de flujo libre (V en la Figura 3, 𝑈∞ en el resto de este
documento) se vea afectada por un factor de velocidad inducida a. Asimismo, la velocidad de
rotación, se afecta por un factor a’, de forma que la velocidad relativa al elemento, 𝑉𝑒𝑓𝑒𝑐𝑡 (W en la
Figura 3) no es exactamente igual a √𝑈∞2 + Ω2𝑟2. Esta velocidad inducida genera una pérdida
continua del momentum a lo largo de la envergadura de las aspas, llegando a cero en la punta. El
factor de pérdida de momentum F (Ecuación 14) de Prandtl permite tomar este efecto en cuenta,
multiplicándolo en los valores de longitud de la cuerda obtenidos en cada estación radial (𝜉 =𝑟
𝑅).
[11]. Este factor varía entre 1 en la raíz y 0 en la punta, por lo cual la geometría de un aspa de hélice
abierta siempre debe terminar en punta.
𝐹 = (2
𝜋) cos−1(𝑒−𝑓)
Ecuación 14
donde 𝑓 =𝐵
2
1 − 𝜉
𝜉 sin 𝜙
Adicionalmente, y sin pérdida de generalidad, tanto para hélices como para ventiladores axiales, se
tiene que:
𝑑𝐹𝑋 = 𝐵(𝑑𝑙 cos 𝜙0 − 𝑑𝑑 sin 𝜙0) Ecuación 15
𝑑𝐹𝑇 = 𝐵(𝑑𝑙 sin 𝜙0 + 𝑑𝑑 cos 𝜙0) Ecuación 16
Asimismo, la eficiencia de conversión de energía rotacional en empuje demuestra ser
𝑑𝑑
𝑑𝑙
𝑑𝐹𝑇
𝑑𝐹𝑋
B
A

11
𝜂ℎé𝑙𝑖𝑐𝑒 =1 −
𝑈𝑡Ω𝑟
1 +𝑈𝑥𝑈∞
Ecuación 17
donde 𝑈𝑥 = 𝑎𝑈∞ 𝑦 𝑈𝑡 = 𝑎′Ω𝑟 son las velocidades inducidas axial y tangencialmente
De esta forma, un algoritmo numérico permitirá diseñar una hélice seleccionando un número entero
de estaciones radiales, parámetros geométricos y condiciones dinámicas en el punto de operación,
obteniendo su distribución de cuerda, calaje y desempeño aerodinámico. No se hará aquí mayor
énfasis en el algoritmo para hélices como sí para ventiladores axiales en el numeral siguiente.
2.2 Diseño óptimo de un ventilador axial
Para un ventilador axial, el diseño se enfoca de otra manera. Se parte de un cambio de presión
producido por el equipo para un caudal determinado. En este sentido, se busca que la distribución de
presiones sea constante a lo largo de la envergadura de las aspas y por esto las secciones de diseño
no se dividen por estaciones radiales propiamente dichas, sino por anillos de área constante.
Teniendo esto presente, se puede demostrar que la contribución de la fuerza de sustentación en el
elemento es
𝑑𝑙 =𝑈∞𝜌(2𝜋𝑟𝑑𝑟)𝑈𝑡2
𝑟
𝑟𝐵 sin 𝜙0
Ecuación 18
donde 𝑈𝑡2= 2𝑈𝑡; corresponde a la velocidad de rotación de estela
Además, la Ecuación 15 y la Ecuación 16 expresadas para un ventilador resultan de la siguiente
forma.
𝑑𝐹𝑋 = 2𝜋𝑟Δ𝑃 𝑑𝑟 Ecuación 19
𝑑𝐹𝑇 = 𝑈∞𝜌(2𝜋𝑟𝑑𝑟)𝑈𝑡2
Ecuación 20
Nótense dos aspectos: primero, se desprecia la contribución del arrastre considerando condiciones de
ángulo de planeo para el flujo alrededor del perfil y por tanto 𝐶𝐿 ≫ 𝐶𝐷, y segundo, el paso radial
d𝑟 ≈ Δ𝑟 no es constante, dado que lo que se conserva es el área entre una estación radial y la
siguiente.
Como se mencionó en el numeral anterior una hélice encerrada posee menos pérdidas que una abierta.
Un ventilador axial satisface la definición de “hélice encerrada”, en principio. De hecho, la velocidad
que es inducida axialmente en el caso de una hélice abierta deja de existir. Es decir, 𝑎 = 0, y por tanto
𝑈𝑥 = 0. Así, la eficiencia del ventilador axial debe ser estrictamente mayor a la de la hélice:
𝜂𝑣𝑒𝑛𝑡𝑖𝑙𝑎𝑑𝑜𝑟 = 1 −𝑈𝑡
Ω𝑟 > 𝜂ℎé𝑙𝑖𝑐𝑒
Finalmente, con la Ecuación 1 y la Ecuación 18, se obtiene la expresión de la cuerda como función
del radio:
𝑐 =4𝜋Δ𝑃
𝐵 cos 𝜙 𝐶𝐿𝜌𝑉𝑒𝑓𝑒𝑐𝑡2 𝑟
Ecuación 21

12
Así pues, se definen parámetros iniciales de acuerdo con las condiciones de operación deseadas (Q,
Δ𝑃, n, D, J). Para esto, es fundamental apoyarse en el Diagrama de Cordier (ver Anexo 1), que reúne
datos experimentales de grandes familias de equipos de conversión de energía, utilizando los números
de diseño adimensionales velocidad específica (Ns) y diámetro específico (Δ).
De este modo, el algoritmo de diseño de un ventilador axial consta de los pasos señalados en seguida.
El detalle de la deducción de algunas de las ecuaciones escritas abajo puede encontrarse en [9].
Tabla 1. Algoritmo de diseño de un ventilador axial teniendo por dados el diámetro del rotor, el caudal, el cambio de
presión del flujo y el número de aspas; junto con la densidad y viscosidad del fluido. Adaptado de [9].
1
Determinar el radio mínimo para el cubo del ventilador mediante la relación
𝑟𝐶𝑢𝑏𝑜,𝑚𝑖𝑛 = √2Δ𝑃
𝜌Ω2
2 Determinar el número de anillos de área a utilizar (a mayor número de ellos mayor precisión
y calcular dr para cada estación partiendo de 𝑟𝐶𝑢𝑏𝑜,𝑚𝑖𝑛.
3
Calcular 𝑈𝑡 mediante
𝑈𝑡
Ω𝑟=
1
2−
1
2√1 −
2Δ𝑃
𝜌(Ω𝑟)2
4 Hallar 𝑉𝑒𝑓𝑓𝑒𝑐𝑡 = √𝑈∞2 + (Ω𝑟 − 𝑈𝑡)2
5
Obtener 𝜙 mediante
cot 𝜙 =Ω𝑟 − 𝑈𝑡
𝑈∞
6 Calcular Δ𝑙 = ∫ 𝑑𝑙 con la Ecuación 18, con el dr correspondiente para cada estación.
7 Calcular c por la Ecuación 21 para cada estación.
8
Aproximar el Re “total” del equipo así:
𝑅𝑒 =0.2𝐷√𝑈∞
2 + (0.7𝑅Ω)2
𝜈
9
Seleccionar un perfil aerodinámico basado en el Re total y demás consideraciones de diseño
(robustez, facilidad de manufactura, etc). Se puede recalcular el Re en 2D para cada estación
utilizando la Ecuación 3.
10 Calcular 𝛽 = 𝜙 + 𝛼𝑜𝑝𝑡í𝑚𝑜 en cada estación. Nótese que 𝛼ó𝑝𝑡𝑖𝑚𝑜 corresponde al ángulo de
planeo del perfil seleccionado en 9.
11 Hallar Δ𝐹𝑥 y Δ𝐹𝑡 por estación radial.
12 Obtener las magnitudes del empuje, momento par y eficiencia teórica del ventilador.

13
VII. Diseño de la Hélice
1. Método de diseño para el anillo
Se ha mencionado que una solución de diseño al problema de las pérdidas de una hélice abierta es
encerrar las aspas en un ducto. Si se toma el mismo principio de diseño de estos ductos, el diseño del
anillo debe ser tal que su sección transversal se componga de un perfil aerodinámico cuyo extradós
se encuentra en la cara interna, y el intradós en la externa. Además, si el perfil tiene combadura,
existiría una componente de fuerza en dirección del empuje por la diferencia de presiones presente.
[13]
Con estas consideraciones se elaboró un breve método de diseño descrito por la tabla en seguida.
Tabla 2. Algoritmo de diseño del anillo.
1 Seleccionar un perfil aerodinámico, preferiblemente asimétrico (con combadura).
2 Fijar c para el perfil tal que coincida con el ancho del cubo de la hélice.
3 Seleccionar el diámetro del anillo, cuyo valor mínimo es D.
4 Iterar y escoger un diámetro del anillo tal que no interfiera con la última estación radial de las
aspas.
2. Diseño a manera de ventilador axial
Se siguió el algoritmo presentado en la Tabla 1. Los parámetros de diseño seleccionados para la hélice
se basaron en algunos de los parámetros de operación reportados en la ficha técnica del dron comercial
DJI Phantom 4. [14] Para determinar el caudal y la presión de diseño, se utilizaron la velocidad de
aire en ascenso (𝑉𝑚𝑎𝑥. 𝑎𝑠𝑐𝑒𝑛𝑠𝑜), la masa del dron (m) y el número de hélices que tiene. Se obtuvo de
la información de un catálogo de DJI [14].
𝑉𝑚𝑎𝑥. 𝑎𝑠𝑐𝑒𝑛𝑠𝑜 = 6 𝑚/𝑠
𝑄 = 𝑉𝑚𝑎𝑥. 𝑎𝑠𝑐𝑒𝑛𝑠𝑜 ⋅ 𝐴𝑒𝑓𝑒𝑐𝑡𝑖𝑣𝑎 𝑎𝑠𝑝𝑎𝑠
donde: 𝐴𝑒𝑓𝑒𝑐𝑡𝑖𝑣𝑎 𝑎𝑠𝑝𝑎𝑠 =𝜋
4(𝐷2 − 𝐷𝑐𝑢𝑏𝑜
2 )
Δ𝑃 =𝑚𝑔
𝐴𝑒𝑓𝑒𝑐𝑡𝑖𝑣𝑎 𝑎𝑠𝑝𝑎𝑠 ⋅ #ℎé𝑙𝑖𝑐𝑒𝑠
Para mayor precisión en el diseño, se realizó una primera iteración hallando una eficiencia teórica del
82% y se corrigió el Δ𝑃 dividiendo por este factor y realizando una nueva iteración, obteniendo el
diseño mostrado a continuación.

14
Tabla 3. Parámetros de diseño iniciales para la hélice, en condiciones atmosféricas de Bogotá
(𝜌 = 0.9 𝑘𝑔/𝑚3, 𝑣 = 2 × 10−5𝑚2/𝑠)
𝑈∞ 6 m/s Diagrama de Cordier
D 0.17 m
B 6
Q 0.112 𝑚3/𝑠
Δ𝑃 220 Pa
Δ 2.12
Ns 1.14
J 0.35
n 101 Hz
(6050 RPM)
Los valores de velocidad y diámetro específicos no se ajustaron de manera satisfactoria al Diagrama
de Cordier. Por esta razón, el diseño se refinó, llegando a los parámetros mostrados en la Tabla 4. En
esta ocasión, fue necesario desviarse de los parámetros iniciales de diseño, es decir de las
características del DJI Phantom 4.
Tabla 4. Parámetros de diseño definitivos para la hélice, en condiciones atmosféricas de Bogotá
(𝜌 = 0.9 𝑘𝑔/𝑚3, 𝑣 = 2 × 10−5𝑚2/𝑠).
𝑈∞ 8.03 m/s Diagrama de Cordier
D 0.17 m
B 6
Q 0.110 𝑚3/𝑠
Δ𝑃 220 Pa
Δ 2.13
Ns 0.756
J 0.709
n 66.7 Hz
(4000 RPM)

15
El Re total aproximado de acuerdo con el paso 8 mostrado en el algoritmo de diseño es 44 517.
Entones, se seleccionó el perfil aerodinámico Göttinger 417A (Gö 417A) dada su usual utilización en
aplicaciones de bajo Reynolds y alto coeficiente de sustentación. Para mayor detalle al respecto se
recomienda indagar las referencias [10], [15] y [16]. El número de Reynolds en el 70% del área
efectiva, hallado mediante la Ecuación 3, resultó de
56 961.
Los datos de los perfiles aerodinámicos se obtuvieron en internet, de la base de datos de la
Universidad de Illinois. La información allí recolectada corresponde a amplios estudios de la
dinámica de perfiles en túnel de viento, para Re del orden de 104 y 105. También se encuentran allí
las coordenadas normalizadas (dadas en porcentaje de cuerda, %c) de los perfiles. [17]
Tabla 5. Características del perfil aerodinámico Gö 417A. Para mayor detalle consúltese el Anexo 2.
Re 59 300
𝐶𝐿 1.238
𝐶𝐿/𝐶𝐷 54.8
𝛼ó𝑝𝑡𝑖𝑚𝑜 8.65°
Espesor relativo máximo 3.20 %c
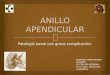
Figura 4. Distribución de cuerda como función de la posición radial respecto al centro de la hélice (eje x) y al punto de
cuarta cuerda (eje y).

16
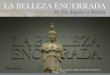
Figura 5. Variación del ángulo de calaje entre la raíz y la punta de las aspas.
3. Diseño del anillo
Para seleccionar el perfil del anillo, se tomó en cuenta el espesor como parámetro determinante para
la resistencia mecánica y facilidad de manufactura. Así pues, el anillo fue diseñado utilizando como
perfil un E387, que es combado, se utiliza también a bajos Re y cuyo grosor relativo máximo de
9.06%c se considera robusto para el diseño. El Gö417A, pese a tener mayor 𝐶𝐿 podría ser muy frágil
para el anillo dado su espesor relativo de 3.20%c.
Tabla 6. Características del perfil aerodinámico E387. Para mayor detalle consúltese el Anexo 3.
Re 61 500
𝐶𝐿 1.183
𝐶𝐿/𝐶𝐷 41.2
𝛼ó𝑝𝑡𝑖𝑚𝑜 8.80°
Espesor relativo máximo 9.06 %c
4. Punto de operación y desempeño teórico
El desempeño teórico en el punto de operación de diseño se presenta enseguida.
Tabla 7. Desempeño teórico de la hélice en el punto de diseño.
T 7.18 × 10−2 Nm
Th 3.05 N
𝜂 80.4%
𝐶𝑇ℎ 0.909
𝐶𝑃 0.792
Es importante resaltar que el diseño se planteó para las condiciones atmosféricas de Bogotá. El Anexo
4 muestra la memoria de cálculos de este diseño.

17
5. Diseño para manufactura y modelo CAD
En principio, se efectuó la manufactura de la hélice por prototipado 3D como una sola pieza. No
obstante, esta forma de fabricación produjo: (1) grandes magnitudes de vibración a velocidades bajas,
(2) una gran dificultad en el acople con el motor, tanto así que se intentaron dos diseños de un
adaptador especial, ambos causando dificultades experimentales, y (3) una posición muy excéntrica
respecto al punto de apoyo del soporte del montaje. Ante esto, se replanteó la estructura de la hélice
y se dividió en dos piezas: Aspas y Nariz, teniendo en mente poder realizar el acople con adaptadores
de hélices para dron existentes en el mercado. Los detalles asociados a este aspecto se presentan en
la sección de Manufactura y Ensamble.
Adicionalmente, otros aspectos estructurales en el diseño fueron: la inclusión de bordes burdos para
la raíz y punta de las aspas para garantizar la resistencia mecánica de la pieza, y la adición de agujeros
destinados al acople entre las dos piezas de la hélice y del ensamble entero con el motor.
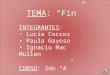
Utilizando el software Autodesk Inventor, se produjo un modelo CAD de la hélice.
(a) Modelo inicial – una sola
pieza.
(b) Modelo definitivo – dos
piezas: “Aspas”.
(c) Modelo definitivo – dos
piezas: “Nariz”.
Figura 6. Modelo CAD de la hélice diseñada.
6. Sistema de propulsión
La propulsión del equipo requiere un motor, un controlador electrónico de velocidad (de ahora en
adelante: ESC) y una fuente de energía. El proceso de selección de estos dispositivos se basó en su
oferta en el mercado, buscando los más utilizados y asequibles para aplicaciones de aeromodelismo
y basándose en las características dinámicas de diseño.
De manera que, primero, el motor debía tener la capacidad de ofrecer 0.0718 Nm a 4 000 rpm,
equivalentes a una potencia mecánica de 30.1 W. Asumiendo una eficiencia del 75%, la potencia
mínima del motor se estableció en 40 W. Se encontró que un motor sin escobillas, outrunner de 12V
es el más usual para operar drones. Finalmente, en cuanto a la alimentación y control del motor, se
halló la existencia de una gama variada de baterías de 11.1V para esta aplicación, al igual que ESC
con máxima corriente de operación de 30A.
Con este criterio se utilizó el motor A2212/10T, de fácil acceso en el mercado colombiano y
prestaciones suficientes propulsar la hélice diseñada. Los demás componentes utilizados se exponen
en la sección de Pruebas Experimentales.

18
Tabla 8. Características del motor A2212/10T.
VIII. Manufactura y Ensamble
La hélice se fabricó por prototipado 3D, utilizando 5% de relleno de material. Se consideraron el ABS
y el PLA como materiales, optando finalmente por el PLA dada su mayor disponibilidad como
materia prima por parte de los proveedores del servicio de fabricación, y en especial, sus propiedades
mecánicas más robustas.
Tabla 9. Propiedades de los materiales evaluados para la hélice. Se muestran los datos de [18] y [19]. Múltiples fuentes
que, en general, el PLA tiene mayor resistencia que el ABS aunque esto varía según el tratamiento dado al material.
Material Rigidez [GPa] Esfuerzo de ruptura [MPa]
PLA 3.50 48 - 53
ABS 1.14 40 - 45
Para el ensamble de la hélice son necesarios los siguientes elementos de sujeción:
• Dos tornillos de especificación UNC 3/16’’ con una tuerca y arandela, cada uno.
• Un spinner o acople para hélice de dron, especificación M5.
Figura 7. Despiece y ensamble de la hélice.
La masa del equipo, con los elementos de sujeción y elementos adicionales de balanceo (detalles en
la sección siguiente), resultó de 455.6 ± 0.1 g.
Corriente máxima [A] 28
Potencia [W] 180
kV (V/RPM) 1400
Spinner
Tornillo,
tuerca y
arandela
3/16’’

19
IX. Pruebas Experimentales
1. Metodología
Se construyó un montaje experimental, detallado en el numeral siguiente, el cual fue introducido en
el túnel de viento de la Universidad, TVIM-46-60 1x1. El túnel cuenta con la capacidad de entregar
viento a velocidades entre 2 m/s y 60 m/s en la sección de pruebas. Se realizaron tomas de datos con
aire estático y con viento, manteniendo siempre una pared abierta al ambiente.
El procedimiento de experimentación consistió, en:
1. Adaptación de un banco de pruebas por medio de toma de datos de la hélice comercial Master
Airscrew G/F 8x4 (en adelante MA-G/F 8x4) cuyo diámetro es de 18” (20.32 cm). Se obtuvo
el desempeño de esta hélice y se contrastó con el de la referencia [12] (ver Anexo 5). Se
aproximó el Re de la medición en el túnel de viento y se reconstruyó el de los datos en [12]
utilizando la ecuación mostrada a continuación.
𝑅𝑒 =𝑐√𝑈∞
2 + (0.7𝑅Ω)2
𝜈
Ecuación 22. Ecuación para la aproximación del número de Reynolds en las mediciones de la hélice comercial (nótese la
similitud con la ecuación del paso 8 del algoritmo de diseño descrito en la Tabla 1).
2. Balancear la hélice diseñada. Evaluar el equilibrio de la hélice y corregir mediante
eliminación de material, utilizando papel de lija de diferentes calibres hasta lograr la mayor
homogeneidad posible y un acabado superficial menos rugoso, y agregando masa que
compense el desequilibrio.
3. Mediciones de la hélice diseñada. Los puntos de operación examinados se seleccionaron
tomando en cuenta los parámetros de diseño de la hélice fabricada y el rango de operación
del túnel de viento. Se logró examinar el rendimiento para J entre 0.7 y 2.
Las variables controladas en cada caso se presentan en la Tabla 10.
Tabla 10. Conjunto de variables controladas y sus magnitudes durante las pruebas experimentales.
Hélice comercial Hélice diseñada
Velocidad de giro
promedio [RPM]
Rango de
velocidad de
viento [m/s]
Velocidad de giro promedio
[RPM]
Rango de
velocidad de
viento [m/s]
5000 2.21 – 10.99
723 2.73 – 3.76
765 2.21 – 3.50
757 2.21 – 2.25
850 2.21 – 3.50
1006 2.21 – 2.99
1474 2.99 – 4.28
700 – 754 – 762 – 856 – 868
– 907 – 982 – 1079 – 1165 Sin viento
La velocidad del viento entregada por el túnel se obtuvo a partir de una ecuación de calibración entre
la velocidad de giro del ventilador del túnel y el viento entregado para la sección de pruebas con pared
abierta. Las variables dependientes utilizadas en el procesamiento de datos y obtención de resultados
fueron las siguientes.

20
Tabla 11. Conjunto de variables dependientes.
Tipo de variable Variable Unidad
Experimental
𝑃𝑒𝑙𝑒 W
T Nm
Th N
Vibraciones 𝑔 *
Analítica
J -
𝐶𝑃 -
𝐶𝑇ℎ -
Re -
𝑈∞ m/s
𝜂 - *Evítese confundir con “g” referente a “gramos”.
Para el cálculo de incertidumbres y propagación de error se utilizó el método detallado en el libro de
John Taylor [20], utilizando un intervalo de confianza del 95% para la componente aleatoria del error.
2. Equipos y montaje
Se utilizó el banco de pruebas RC Benchmark 1580®. Los accesorios y especificaciones del banco se
muestran en la Tabla 12. Mediante el software de recepción de datos de este equipo, el RC Benchmark
GUI-1.1.6, se registró el empuje producido, momento par requerido, potencia eléctrica consumida
entre otras variables de interés y en tiempo real, con una frecuencia de muestro de 33.3 Hz. Empero,
la velocidad de giro fue imposible de medir con el programa. Pese a que el banco trae consigo un
sensor óptico de velocidad angular, el software no registraba medición alguna. A raíz de esta avería,
los datos de velocidad fueron medidos utilizando un tacómetro óptico.
Tabla 12. Accesorios y especificaciones del banco de pruebas comercial RC Benchmark 1580®.
*El límite superior de vibraciones (8 g) fue impuesto manualmente utilizando el software.
**Evítese confundir con “g” referente a “gramos”.
Para poder instalar el banco de pruebas de RC Benchmark al interior de la sección de pruebas del
túnel de viento se utilizó, en principio, el soporte diseñado por Nicolás Salgado [21] para su proyecto
de grado. Éste está hecho de tres piezas de acero 1020, base, tapa y barra, ensambladas mediante
tornillos. Sin embargo, durante la primera toma de datos de la hélice diseñada, se evidenció una
vibración superior a 1𝑔 para velocidades del orden de 600 rpm (con la primera hélice fabricada, es
decir, una sola pieza -léase el numeral 5 de Diseño de la Hélice-). Por lo cual, se rediseñó el soporte
agregando una barra adicional y realizando la unión de las piezas mediante soldadura. También, se
adecuó el montaje para absorber las vibraciones producidas sujetando un par de alambres y cuerdas
con masas en sus extremos, iterando varias configuraciones de ubicación y cantidad de masa. La
imagen mostrada en seguida compara el soporte inicial y el modificado.
Variable Dispositivo Resolución Rango
Unidad Min Max
Empuje Celda de carga 10−15 -5 5 N
Momento par Celda de carga (x2) 10−16 -1.5 1.5 Nm
Voltaje Tarjeta de adquisición 10−13 0 35 V
Corriente Tarjeta de adquisición 10−15 0 40 A
Vibraciones* Acelerómetro (x3) 10−9 0 8 𝑔**

21
(a) Soporte inicial con uniones realizadas con
tornillos.
(b) Soporte modificado (CAD en la imagen) con
uniones permanentementes por soldadura.
Figura 8. Soporte para el montaje experimental.
La Tabla 13 muestra los equipos empleados, además del motor mencionado en la Tabla 8. La
alimentación del sistema se dimensionó basándose en una batería de 12V y 2200 mAh, pero se apreció
que la batería perdía su carga con rapidez en las condiciones de carga requeridas: 9V a 11V y entre
1A y 3A. Ante esto, se utilizó una fuente de voltaje variable. En adición, se evaluó y confirmó la
exactitud de los valores de potencia eléctrica arrojados por el RC Benchmark midiendo el voltaje y
corriente directamente de la fuente.
Tabla 13. Dispositivos de experimentación adicionales.
Dispositivo Rango Resolución
ESC 30A (máximo) NA
Fuente de voltaje 0 – 40 V / 0 – 10 A 0.5V / 0.125A
Tacómetro óptico Extech Instruments™ 10 – 10 000 rpm 0.1rpm (< 1000rpm)
1rpm (> 1000rpm)
Multímetro (x2) Fluke™
6.000V 0.001V
60.00V 0.01V
600.0 mV 0.1 mV
Pinza amperimétrica Fluke™ 20A rms (máximo) 100 mV/A
Finalmente, el balanceo de la hélice se efectuó, primero, instalando el conjunto de aspas sobre un
montaje construido utilizando soportes universales y un eje liso. Acto seguido, se instaló el ensamble
entero en el motor, y se evaluó el balance nuevamente. Como solución al desbalance hallado, se buscó
homogeneizar la distribución de masa del equipo utilizando papel de lija de calibres entre 120 y 600,
y agregando pequeñas masas dónde se identificase menor concentración de masa; en total se
añadieron 6.5 g como se señala en la Figura 9.

22
Figura 9. Balanceo del conjunto de aspas.
Figura 10. Montaje experimental.
3. Resultados
A continuación, se presentan los resultados obtenidos. Es importante notar dos asuntos. Primero, que
la eficiencia obtenida para la hélice diseñada se calculó para el sistema completo debido a que la
eficiencia calculada por medio de la Ecuación 11 arrojó valores fuera del rango [0 , 1]. Segundo, el
viento ejerce una fuerza lo suficientemente fuerte para que la celda de carga empuje mida un “empuje
negativo”, éste se tiene que restar (o sumar en magnitud) para obtener los resultados correctos; para
esto último el software permite poner en cero los sensores a discreción.
𝜂 =𝑇ℎ ⋅ 𝑈∞
𝑃𝑒𝑙𝑒
Ecuación 23. Eficiencia calculada para la hélice diseñada (𝜂𝑇𝑜𝑡𝑎𝑙 de la hélice comercial).
Masa adicional de 6.5g para balanceo.
SECCIÓN DE
PRUEBAS DEL
TÚNEL DE
VIENTO
Masas para
absorción de
vibración Fuente de voltaje
Computador
Banco de
pruebas RC
Benchmark

23
3.1 Hélice comercial
En primer lugar, se observó el comportamiento del empuje, momento par, potencia y vibraciones en
función del tiempo. A manera de referencia, se presentan los resultados de las relaciones de avance
mínima y máxima analizadas.
Figura 11. Resultados MA-G/F 8x4. Comportamiento dinámico en función del tiempo.
Figura 12. Resultados MA-G/F 8x4. Comportamiento dinámico en función del tiempo.
De este primer conjunto de resultados, se observa que el empuje y el momento par tienen mayor error
aleatorio a mayor J. También, el montaje tiene mayor magnitud de vibración a mayor J, aunque in
situ se evidenció que es de menor amplitud; el aumento se debe a una frecuencia mayor.
Ahora, relacionado con el rendimiento, se evidencia que los datos obtenidos con el montaje y los
reportados en [12] son satisfactoriamente cercanos como lo muestran las figuras Figura 13 a la Figura
16 (véanse también los anexos Anexo 5 y Anexo 6). También, se encontró una incertidumbre relativa
muy pequeña para las mediciones, la más alta siendo de 1.872%. Por tanto, el montaje está en

24
capacidad de producir resultados suficientemente exactos y especialmente, precisos. Es importante
considerar que las condiciones atmosféricas de Bogotá generan un Re menor al de las condiciones en
la Universidad de Illinois.
Figura 13. Resultados MA-G/F 8x4. Coeficiente de empuje.
Error relativo entre Bogotá e Illinois en el PMO: 32.1% a 4000rpm, 36.6% a 5000rpm
Figura 14. Resultados MA-G/F 8x4. Coeficiente de Potencia.
Error relativo entre Bogotá e Illinois en el PMO:11.9% a 4000rpm, 17.6% a 5000rpm

25
Figura 15. Resultados MA-G/F 8x4. Eficiencia.
Error relativo entre Bogotá e Illinois en el PMO: 0.21% a 4000rpm, 2.92% a 5000rpm
Figura 16. Resultados MA-G/F 8x4. Aproximación del Re.
3.2 Hélice diseñada
La Figura 17 muestra parte de los resultados preliminares, obtenidos con aire estático y el montaje
del soporte originalmente diseñado por Salgado, con la primera hélice fabricada (una sola pieza)
donde se apreció una elevada vibración y alta varianza de los datos, a velocidades de giro mucho
menores a la de diseño. Se encontró que la componente de mayor magnitud de vibración tiene
dirección ortogonal a la dirección del viento. Si se filtran los resultados por los de baja frecuencia,
eliminando las frecuencias altas, la desviación estándar disminuye considerablemente, y el promedio
se mantiene numéricamente igual en magnitud.

26
Figura 17. Resultados de la hélice diseñada. Comportamiento dinámico en función del tiempo con soporte original.
Una vez modificados el soporte y la estructura de la hélice, se obtuvo un comportamiento como el
mostrado a continuación.
Figura 18. Resultados de la hélice diseñada. Comportamiento dinámico en función del tiempo con soporte modificado.
Se observó que la magnitud de las vibraciones disminuyó notablemente con el nuevo soporte y el
mecanismo de absorción de vibración utilizado. Sin embargo, para alguna velocidad de giro alrededor
de 700 rpm el montaje parece entrar en resonancia, pues las vibraciones tienden a crecer cuando se
aumenta progresivamente la velocidad, para luego aplacarse el rebasar 710 rpm, aproximadamente.
A velocidad de giro superior a 1474 rpm las vibraciones aumentaban nuevamente a magnitudes tales
que fue imposible tomar datos a mayor velocidad. Los resultados finales se presentan enseguida.

27
Figura 19. Resultado de la hélice diseñada. Coeficiente de empuje con aire estático.
Figura 20. Resultados de la hélice diseñada. Coeficiente de empuje con viento.

28
Figura 21. Resultados de la hélice diseñada. Coeficiente de potencia con aire estático.
Figura 22. Resultados de la hélice diseñada. Coeficiente de potencia con viento.

29
Figura 23. Resultados de la hélice diseñada. Aproximación del Re.
Figura 24. Resultados de la hélice diseñada. Eficiencia.

30
X. Discusión de Resultados
Pese a la dificultad que significó la vibración del montaje, fue posible evaluar el desempeño de la
hélice diseñada y verificar el alcance de los objetivos trazados. No obstante, los resultados se
obtuvieron a una velocidad de giro relativamente y por ende en un régimen diferente del número de
Reynolds; además, su exactitud no sería la misma que la vista con la MA-G/F 8x4, justamente por la
vibración elevada. Aun así, los resultados muestran una precisión adecuada, con incertidumbre
relativa promedio de 8.00% y se pueden rescatar algunos aspectos de interés.
Primeramente, se aprecia que a medida que el Re disminuye, el 𝐶𝑇ℎ aumenta y alcanza valores
superiores al del punto de diseño. En segundo lugar, el coeficiente de potencia es cercano al de diseño
cuando la relación de avance tiende a este punto. Por otra parte, la eficiencia aumenta con J, en
general, pero no logra la magnitud del punto de diseño y parece tener una relación con ciertos rangos
del Re. En este sentido, los resultados indican que la magnitud del coeficiente de empuje es mayor al
de la hélice comercial probada, a costa de un incremento del coeficiente de potencia, pero con una
eficiencia mayor a bajos Re.
Una inspección de la gráfica en la Figura 20, permite concluir que conforme la velocidad de giro de la
hélice disminuye por debajo de 850 rpm, y el viento incidente crece, es decir, Re bajos pero J altas,
el coeficiente de empuje tiende a aumentar por encima del punto de diseño. De hecho, ocurre para Re
aproximadamente menores a 13 000 y J superiores a 1. Sin embargo, al no contar con resultados de
J superiores a 1 para Re mayores de 13 000 es pronto para afirmar que el fenómeno sea exclusivo de
este rango de velocidad de giro. Lo cierto es que, para relaciones de avance de hasta el doble del
punto de diseño, el coeficiente de empuje supera el teórico.
Relativo al 𝐶𝑃, es evidente que cerca de la relación de avance de diseño, el valor experimental tiende
a acercase. El punto más cercano en J difiere un 31.9% del valor teórico. Por otro lado, conforme
aumenta la relación de avance, el coeficiente cae, a excepción de cuando la velocidad de giro es menor
a 757 rpm, es decir para Re del orden de 12 600. A partir de allí el coeficiente tiende a crecer. Es
importante recordar que cerca de 700 rpm es donde el montaje parecía entrar en resonancia y podría
afectar el consumo de energía de la fuente para garantizar la propulsión.
De esta forma, la eficiencia tiene un comportamiento directamente proporcional a la relación de
avance dentro del rango medido, aunque su magnitud varía con el Re. Para Re aproximadamente
menores a 12 600, la eficiencia alcanza los valores más altos, llegando a 60.5% con Re de 12 683
(girando a 757 rpm). Cuando el Re se encuentra entre 12 600 y 15 000 disminuye a mínimos tan bajos
como 7.73%, mientras que alcanza valores intermedios para Re mayores a 15 000 oscilando entre
17.9% y 28.6%. Ahora bien, si se contase con mayor número de datos para este último conjunto de
Re podría encontrarse una superposición con los Re más bajos, observando la tendencia de los
resultados a 1006 rpm y 1474 rpm.
En síntesis, los resultados indican que el diseño aplicado no solo puede lograr un aumento del
coeficiente de empuje respecto a hélices comerciales, sino al 𝐶𝑇ℎ teórico mismo. Sin embargo, la
energía requerida para lograrlo sería más grande a velocidades de giro comparables, dada la magnitud
del 𝐶𝑃. Además, la eficiencia tiende a ser creciente con la relación de avance y toma valores superiores
al demostrado por la hélice comercial para bajos número de Reynolds, pero menores a la del punto
diseño.

31
Tema aparte, los resultados en condiciones de aire estático, muestran que el empuje es menor cuando
no hay viento incidente, y hay mayor consumo de potencia. Se puede asociar este comportamiento a
una condición de arranque de algún vehículo que utilice la hélice, para las velocidades más bajas, o a
un ventilador, para las velocidades más altas. Colocando los resultados con aire estático y con viento
en un mismo contexto, la hélice se podría utilizar en drones de carga liviana o para ventilación.
Inclusive puede considerarse su uso en agua, dado que a que bajas velocidades de giro, se evita la
cavitación, y según lo obtenido la eficiencia es la más alta en este régimen.
XI. Conclusiones
El proceso de diseño, manufactura puesta a prueba y resultados de la hélice diseñada, permitieron
deducir lo siguiente.
• Es posible diseñar una hélice aplicando el diseño de un ventilador axial, pero los parámetros
deben ser tales que Ns y Δ se ajusten adecuadamente al Diagrama de Cordier.
• Las vibraciones causadas por desbalance y por la naturaleza misma del montaje son un factor
crucial en el proceso experimental.
• Aplicando el diseño de ventilador axial y encerrando la hélice con un anillo, se logró superar
el coeficiente de empuje del punto de diseño y de una hélice comercial para dron. También
se superó la eficiencia total de la hélice comercial, pero a un Re mucho menor, incluso menos
de la mitad del teórico.
• La magnitud de los resultados puede ser inexacta a razón de las vibraciones del montaje
experimental. No es posible conocer dicha exactitud sin corregir primero estas vibraciones
para conseguir un conjunto de datos más amplio. Pese a ello, la precisión obtenida fue
aceptable y la incertidumbre promedio fue del 8.00%.
• El desempeño de le hélice, a falta de información para velocidades de giro superiores a 1474
rpm, se puede clasificar de la siguiente forma, de acuerdo con los siguientes intervalos de Re:
▪ Re < 12 600, J > 1: alta eficiencia.
▪ 12 600 < Re < 15 000, J > 1: baja eficiencia.
▪ Re > 15 000, J < 1: eficiencia media.

32
XII. Recomendaciones
De la experiencia que dejó el desarrollo de este proyecto se identificaron varios aspectos a mejorar
en los ámbitos del diseño de la hélice y de la experimentación.
Acerca del proceso de diseño, se sugiere, primero, seleccionar siempre el motor a utilizar antes de
fabricar la hélice, esto con el fin de diseñar correctamente la estructura que permita un acople fácil y
sin necesidad de diseñar algún tipo de adaptador especial; segundo, se debe balancear el equipo de la
manera más precisa posible, ya que es un factor determinante en la generación de vibraciones; tercero,
considerar puntos específicos de las piezas de la hélice en los que se pueda quitar material, a fin de
reducir su volumen sin afectar el balance, y así permitir mayor densidad de material de prototipado o
utilizar un material más denso y resistente, y cuarto, investigar a mayor profundidad sobre la
geometría de perfiles aerodinámicos en los extremos de las aspas que tomen en cuenta temas como
la resistencia mecánica y la facilidad de manufactura para aplicar estos conocimientos al diseño de
estos puntos.
Por otra parte, en lo que concierne a la experimentación, se recomienda, primero, medir repetidamente
la velocidad y densidad del aire aguas arriba de la hélice en la sección de pruebas del túnel de viento
para contar con datos más exactos; segundo, utilizar un sensor óptico o electrónico que permita tomar
los datos de velocidad de giro utilizando el sistema de adquisición de datos del RC Benchmark;
tercero, diseñar el soporte del montaje teniendo en cuenta un estudio previo de las vibraciones e iterar
en el diseño si es necesario, incluso considerar el diseño y fabricación de un módulo de adquisición
de datos más robusto que el RC Benchmark. Sería ideal incluir un perfil aerodinámico en la estructura
del soporte, de forma tal que no afecte el flujo de aire. Entre otros aspectos se sugiere tomar datos
aplicando el siguiente algoritmo: (1) seleccionar una velocidad de viento y aplicarla al túnel, (2)
imponer una velocidad de giro y tomar datos, (3) variar la velocidad de giro según el interés del
experimento para obtener datos a diferentes relaciones de avance a la velocidad de viento escogida,
y (4) seleccionar una nueva velocidad de viento y repetir los pasos anteriores. Finalmente, sería ideal
cubrir un rango más amplio de relaciones de avance al estudiado en el proyecto y para ello es
indispensable poder llegar a velocidades de giro más altas, es decir, reducir vibraciones.
XIII. Trabajo Futuro
En cuanto a temas que se pueden continuar desarrollando con este diseño de hélice, es posible hacer
un estudio minucioso del flujo de aire alrededor de los bordes del anillo, a fin de conocer detalles que
permitan un diseño más fino del mismo. En principio, se debería aplicar humo sobre la hélice para
diferentes relaciones de avance y velocidades de giro, observar y sacar conclusiones sobre el régimen
del flujo que allí se presenta. Adicionalmente, resultaría interesante explorar la aplicación de la hélice
en agua o fluidos más viscosos que el aire, dado el buen desempeño a bajas velocidades y bajos Re.
Por último, se podría hacer un estudio comparativo más amplio, diseñando una hélice abierta, con
aspas terminando en punta, utilizando los mismos parámetros de diseño de una hélice encerrada y
comparar el desempeño de ambas e incluso, comparar con una tercera hélice: una comercial de
tamaño similar.

33
XIV. Referencias y Bibliografía
[1] Justin, «The History Of Drones (Drone History Timeline From 1849 To 2019),» 2019. [En
línea]. Available: https://www.dronethusiast.com/history-of-drones/.
[2] D. Joshi, «What are drones good for? Common commercial applications of drones in
agriculture, business and the military,» 15 agosto 2017. [En línea]. Available:
https://www.businessinsider.com/commercial-drone-uses-agriculture-business-military-2017-
8.
[3] Revista Dinero, «Drones: industria que coge vuelo y requiere normatividad en Colombia,»
Revista Dinero, 12 diciembre 2017.
[4] Revista Dinero, «Estos son los planes para construir drones y aviones en Colombia,» Revista
Dinero, 26 abril 2018.
[5] G. Realpe, «El Ingeniero Colombiano que Hace Drones a la Medida,» 16 abril 2016. [En
línea]. Available: https://www.enter.co/especiales/experiencia-dron/hay-oportunidades-de-
mercado-con-los-drones-en-colombia/.
[6] R. Whitcomb, «A Design Approach and Selected Wind-Tunnel Results At High Subsonic
Speed For Wing-Tip Mounted Winglets,» National Aeronautics and Space Administration,
Hampton, 1976.
[7] A. Ommundsen, «Unconventional Propeller Tip Design,» Trondheim, 2015.
[8] S. Yilmaz, D. Erdem y M. Kavsaoglu, «Performance of a ducted propeller designed for UAV
applications at zero angle of attack flight: An experimental study,» Elsevier, 2015.
[9] Á. Pinilla, Curso Electivo de Aerodinámica Básica Notas de Lectura del Curso, Bogotá, 2018.
[10] Department of Aerospace Engineering, «UIUC Airfoil Data Site,» UIUC Applied
Aerodynamics Group, University of Illinois, 2019. [En línea]. Available: https://m-
selig.ae.illinois.edu/ads.html.
[11] C. Adkins y R. Liebeck, «Design of Optimum Propellers,» Journal of Propulsion and Power,
1994.
[12] Department of Aerospace Engineering, «UIUC Propeller Data Site,» UIUC Applied
Aerodynamics Group, University of Illinois, 2019. [En línea]. Available: https://m-
selig.ae.illinois.edu/props/propDB.html.
[13] RCModelReviews, «How ducting a propeller increases efficiency and thrust,» 22 julio 2015.
[En línea]. Available: https://youtu.be/Cew5JF8q6eY.
[14] DJI, Phantom-4 Specifications, 2016.

34
[15] L. Durán, «Diseño y pruebas de una hélice propulsora para un aeromodelo en condiciones
atmosféricas de Bogotá.,» Bogotá, 2015.
[16] C. Marín, «Diseño e Implementación del Sistema Propulsivo para un Prototipo de Micro
Vehículo Aéreo.,» Bogotá, 2015.
[17] Department of Aerospace Engineering, «UIUC Low-Speed Airfoil Tests,» UIUC Applied
Aerodynamics Group, 2019. [En línea]. Available: https://m-
selig.ae.illinois.edu/uiuc_lsat.html.
[18] M. Jamshidian, E. Arba, M. Jacquot y S. Desorby, «Poly‐Lactic Acid: Production,
Applications, Nanocomposites, and Release Studies,» Comprehensive Reviews in Food
Science and Food , 2010.
[19] Sezer, Hürşad, Eren y Oğulcan, «FDM 3D printing of MWCNT re-inforced ABS nano-
composite parts with enhanced mechanical and electrical properties,» Elsevier, 2018.
[20] J. Taylor, An Introduction to Error Analysis. The Study of Uncertainties in Physical
Measurements, Sausalito: University Science Books, 1997.
[21] N. Salgado, «Caracterización de propela con alto coeficiente de avance,» Bogotá, 2019.
[22] C. González y Á. Pinilla, «Development of a high-performance propeller for low Reynolds
Numbers,» Bogotá, 2010.
[23] S. Hoerner, «Aerodynamic Shape of the Wing Tips,» United States Air Force, Dayton, Ohio,
1952.
[24] J. Weierman, «Winglet Design and Optimization for UAVs,» Stillwater, Oklahoma, 2010.
[25] L. M. López, «Mejoramiento del túnel de viento TVIM-460-25-3.6: Diseño y Manufactura de
un Ventilador Axial.,» Bogotá, 2008.
[26] R. Weir, «Ducted Propeller Design and Analysis,» Sandia National Laboratories,
Albuquerque, 1987.
[27] Vistrónica, «Motor eléctrico Brushless A2212 / 1400 KV 10T,» 2016. [En línea]. Available:
https://www.vistronica.com/aeromodelismo/motor-electrico-brushless-a2212-1400-kv-10t-
detail.html?gclid=EAIaIQobChMIw9rx7KyR4gIVzF6GCh13JAYhEAYYASABEgJa-
_D_BwE.
[28] dys, «D2830,» 2017. [En línea]. Available: http://www.dys.hk/product/D2830.html.
[29] [En línea]. Available: https://components101.com/sites/default/files/inline-images/2212-
BLDC-Motor-Dimensions.png. [Último acceso: 10 mayo 2019].
[30] J. Hunter, D. Dale, E. Firing y M. Droettboom, «Matplotlib,» The Matplotlib Development
Team, 2019. [En línea]. Available: https://matplotlib.org/index.html.

35
XV. Anexos
Anexo 1. Diagrama de Cordier.

36
Anexo 2. Datos del perfil Gö 417A para Re = 59 300.
𝛼 𝐶𝐿 𝐶𝐷
-2.25 -0.230 0.0773
0.67 -0.066 0.0607
0.87 0.178 0.0457
2.49 0.479 0.0360
3.95 0.710 0.0364
5.62 0.984 0.0285
7.10 1.131 0.0213
8.65 1.238 0.0226
10.17 1.337 0.0283
11.76 1.398 0.0412
Anexo 3. Datos del perfil E387 para Re = 61 500.
𝛼 𝐶𝐿 𝐶𝐷
-5.36 -0.255 0.0425
-3.71 -0.127 0.0248
-2.12 0.059 0.0240
-0.68 0.250 0.0237
0.92 0.439 0.0296
2.58 0.611 0.0346
4.147 0.769 0.0400
5.40 0.880 0.0421
6.98 1.026 0.0415
8.80 1.183 0.0287
10.13 1.201 0.0437

37
Anexo 4. Memoria de Cálculos.
Paso r (m) dr (m) Ωr (m/s) 𝑈𝑡 (m/s) 𝑉𝑒𝑓𝑒𝑐𝑡 (m/s) 𝑈𝑡2 (m/s) cot(𝜙0) 𝜙0 (deg) L (N) Cuerda (m) Re β (deg) 𝐹𝑥 (N) 𝐹𝑡 (N) T (Nm)
0 0.0536 0.0000 22.4310 9.2385 15.4470 18.4771 1.6418 31.3457 0.0000 0.1084 83695 39.99573 0.00000 0.00000 0.00000
1 0.0555 0.0020 23.2675 7.9643 17.2846 15.9285 1.9044 27.7034 0.0289 0.0866 74842 36.35345 0.15334 0.08052 0.00447
2 0.0575 0.0019 24.0750 7.2394 18.6550 14.4787 2.0951 25.5149 0.0283 0.0755 70391 34.16492 0.15315 0.07310 0.00420
3 0.0593 0.0019 24.8562 6.7203 19.8363 13.4406 2.2570 23.8969 0.0279 0.0680 67464 32.54692 0.15299 0.06778 0.00402
4 0.0611 0.0018 25.6136 6.3156 20.9041 12.6312 2.4016 22.6065 0.0276 0.0625 65334 31.25648 0.15284 0.06364 0.00389
5 0.0629 0.0018 26.3493 5.9849 21.8924 11.9698 2.5343 21.5336 0.0274 0.0582 63691 30.18361 0.15271 0.06026 0.00379
6 0.0646 0.0017 27.0650 5.7063 22.8202 11.4126 2.6580 20.6173 0.0272 0.0547 62375 29.26727 0.15260 0.05741 0.00371
7 0.0663 0.0017 27.7622 5.4665 23.6996 10.9329 2.7746 19.8195 0.0270 0.0517 61293 28.46954 0.15250 0.05496 0.00364
8 0.0679 0.0016 28.4424 5.2566 24.5387 10.5133 2.8854 19.1149 0.0269 0.0492 60384 27.76495 0.15240 0.05282 0.00359
9 0.0695 0.0016 29.1066 5.0707 25.3435 10.1414 2.9912 18.4855 0.0268 0.0470 59609 27.13552 0.15232 0.05092 0.00354
10 0.0710 0.0016 29.7560 4.9042 26.1186 9.8084 3.0927 17.9180 0.0267 0.0451 58938 26.56802 0.15224 0.04923 0.00350
11 0.0726 0.0015 30.3916 4.7539 26.8675 9.5078 3.1905 17.4024 0.0266 0.0434 58351 26.05240 0.15217 0.04769 0.00346
12 0.0740 0.0015 31.0141 4.6171 27.5930 9.2343 3.2850 16.9309 0.0265 0.0419 57834 25.58086 0.15211 0.04630 0.00343
13 0.0755 0.0015 31.6244 4.4920 28.2973 8.9840 3.3765 16.4972 0.0264 0.0406 57374 25.14720 0.15205 0.04503 0.00340
14 0.0769 0.0014 32.2232 4.3768 28.9825 8.7537 3.4654 16.0964 0.0264 0.0393 56961 24.74644 0.15199 0.04386 0.00337
15 0.0783 0.0014 32.8110 4.2704 29.6502 8.5407 3.5518 15.7245 0.0263 0.0382 56589 24.37447 0.15194 0.04278 0.00335
16 0.0797 0.0014 33.3884 4.1715 30.3018 8.3430 3.6360 15.3779 0.0263 0.0371 56252 24.02790 0.15189 0.04178 0.00333
17 0.0811 0.0014 33.9561 4.0794 30.9384 8.1588 3.7181 15.0539 0.0262 0.0362 55945 23.70389 0.15185 0.04084 0.00331
18 0.0824 0.0013 34.5144 3.9933 31.5612 7.9865 3.7983 14.7500 0.0262 0.0353 55664 23.40003 0.15181 0.03997 0.00329
19 0.0837 0.0013 35.0638 3.9125 32.1710 7.8250 3.8767 14.4643 0.0261 0.0344 55406 23.11427 0.15177 0.03915 0.00328
20 0.0850 0.0013 35.6047 3.8365 32.7687 7.6730 3.9535 14.1948 0.0261 0.0337 55169 22.84484 0.15173 0.03838 0.00326
Porcentaje diametral del cubo 63%

38
Anexo 5. Datos desempeño de la hélice MA G/F 8x4 obtenidos de la base de datos de la Universidad de Illinois utilizados para comparación con los
datos arrojados en la presente investigación (el coeficiente de empuje que este documento se nombra 𝐶𝑇ℎ es denotado como 𝐶𝑇 en las gráficas de la
Universidad de Illinois).
Desempeño a 5007 rpm
J 𝑪𝑻𝒉 𝑪𝑷 𝜼
0.137 0.0772 0.0392 0.27
0.175 0.0729 0.0388 0.328
0.213 0.0674 0.0375 0.383
0.245 0.0633 0.0371 0.418
0.283 0.0575 0.0361 0.451
0.319 0.0521 0.0338 0.491
0.357 0.0454 0.0323 0.502
0.394 0.0395 0.0303 0.512
0.434 0.0322 0.0272 0.513
0.469 0.0255 0.0245 0.488
0.508 0.0185 0.0209 0.448
0.542 0.0116 0.0181 0.347
0.58 0.0043 0.0143 0.176
0.611 -0.0022 0.011 -0.122
Desempeño a 4009 rpm
J 𝑪𝑻𝒉 𝑪𝑷 𝜼
0.172 0.0703 0.0393 0.307
0.218 0.0644 0.0388 0.363
0.266 0.0573 0.0368 0.415
0.307 0.051 0.0347 0.452
0.349 0.0446 0.0329 0.473
0.411 0.0333 0.0286 0.479
0.453 0.0254 0.0253 0.454
0.498 0.0173 0.0218 0.395
0.544 0.0088 0.0174 0.275
0.59 0.001 0.0133 0.047
0.633 -0.0078 0.0094 -0.532

39
Anexo 6. Resultados experimentales de la MA-G/F 8x4, a 5 000 RPM.
Magnitudes Error relativo (±%)
J 𝑪𝑻𝒉 𝑪𝑷 𝜼 𝜼𝑻𝒐𝒕𝒂𝒍 𝑪𝑻𝒉 𝑪𝑷 𝜼 𝜼𝑻𝒐𝒕𝒂𝒍
0.131 0.071 0.036 0.259 0.142 0.125% 0.176% 0.323% 0.124%
0.176 0.066 0.037 0.312 0.179 0.107% 0.151% 0.264% 0.107%
0.207 0.063 0.037 0.353 0.204 0.077% 0.108% 0.187% 0.076%
0.252 0.057 0.035 0.412 0.233 0.104% 0.147% 0.261% 0.105%
0.283 0.054 0.036 0.418 0.251 0.081% 0.117% 0.196% 0.085%
0.313 0.050 0.034 0.461 0.267 0.101% 0.148% 0.256% 0.108%
0.360 0.044 0.032 0.498 0.280 0.089% 0.156% 0.277% 0.128%
0.389 0.036 0.031 0.459 0.279 0.103% 0.161% 0.265% 0.123%
0.434 0.027 0.025 0.469 0.256 0.116% 0.197% 0.362% 0.159%
0.466 0.025 0.024 0.470 0.270 0.151% 0.252% 0.439% 0.202%
0.512 0.016 0.019 0.440 0.218 0.134% 0.233% 0.471% 0.191%
0.541 0.012 0.018 0.381 0.194 0.170% 0.407% 0.800% 0.370%
0.587 0.007 0.019 0.233 0.146 0.120% 0.587% 0.936% 0.574%
0.649 -0.007 0.018 -0.248 -0.183 0.185% 0.661% 0.896% 0.635%
Anexo 7. Resultados experimentales de la hélice diseñada. Con viento.
Velocidad de giro [rpm] Magnitudes Error relativo (±%)
J 𝑪𝑻𝒉 𝑪𝑷 𝜼 Re 𝑪𝑻𝒉 𝑪𝑷 𝜼
723
1.347 1.395 0.854 0.370 11780 1.01% 3.74% 0.94%
1.464 1.270 1.493 0.377 12024 0.77% 3.07% 0.63%
1.574 1.198 1.515 0.397 12318 1.07% 1.29% 0.92%
1.691 1.207 1.222 0.440 12568 1.16% 1.78% 1.09%
1.846 1.370 1.314 0.541 12623 1.36% 4.49% 1.23%
757
1.025 0.920 0.851 0.326 12131 2.27% 3.14% 2.23%
1.147 0.907 0.212 0.361 12258 4.57% 30.40% 4.56%
1.267 0.972 -0.211 0.462 12411 1.60% 11.98% 1.52%
1.406 0.903 -0.315 0.456 12436 1.44% 10.93% 1.41%
1.518 1.167 0.141 0.605 12683 3.20% 29.03% 3.18%
765
1.023 0.824 0.568 0.185 12156 0.68% 0.75% 0.59%
1.137 0.544 0.320 0.090 12350 1.18% 1.07% 1.14%
1.250 0.844 0.484 0.155 12556 0.77% 2.40% 0.71%
1.392 0.837 0.075 0.167 12538 0.65% 6.54% 0.51%
1.504 0.836 0.039 0.184 12776 0.67% 14.32% 0.61%
1.611 0.843 0.037 0.205 13053 0.75% 13.65% 0.69%
850
0.926 0.471 0.411 0.077 13314 1.00% 1.29% 0.95%
1.030 0.474 0.356 0.088 13493 1.41% 1.67% 1.38%
1.134 0.680 0.463 0.140 13665 1.14% 2.56% 1.10%
1.242 0.688 0.340 0.157 13817 0.89% 2.44% 0.85%
1.346 0.702 0.355 0.175 14008 0.95% 3.32% 0.90%
1.441 0.698 0.406 0.192 14285 1.05% 1.83% 0.99%

40
Velocidad de giro [rpm] Magnitudes Error relativo (±%)
J 𝑪𝑻𝒉 𝑪𝑷 𝜼 Re 𝑪𝑻𝒉 𝑪𝑷 𝜼
1006
0.778 0.600 1.204 0.179 15655 0.99% 0.71% 0.93%
0.867 0.585 1.179 0.198 15792 1.37% 0.98% 1.31%
0.954 0.609 1.147 0.231 15977 1.65% 1.07% 1.63%
1.051 0.606 1.170 0.253 16014 1.13% 0.93% 1.06%
1474
0.718 0.468 1.045 0.191 22787 0.79% 4.57% 0.75%
0.779 0.442 1.051 0.198 22920 0.95% 4.56% 0.93%
0.840 0.451 1.037 0.219 23066 0.52% 2.60% 0.48%
0.901 0.470 1.004 0.248 23190 0.75% 1.26% 0.72%
0.960 0.464 0.953 0.264 23374 0.66% 0.43% 0.64%
1.020 0.467 0.945 0.286 23551 1.14% 0.45% 1.12%
Anexo 8. Resultados experimentales de la hélice diseñada. Con aire estático.
Velocidad de giro [rpm] Magnitud Error relativo (±%)
𝑪𝑻𝒉 𝑪𝑷 rpm 𝑪𝑻𝒉 𝑪𝑷
1165 0.243 1.696 0.18% 4.80% 0.56%
1079 0.362 1.674 0.11% 1.49% 0.76%
982 0.348 1.814 0.17% 0.89% 0.48%
868 0.786 2.035 0.19% 2.52% 1.06%
754 0.387 2.054 0.19% 2.82% 1.26%
700 0.738 2.794 0.21% 3.59% 3.29%
762 0.738 0.504 0.17% 0.65% 1.36%
856 0.664 0.651 0.16% 1.13% 1.26%
907 1.751 0.283 0.15% 0.44% 3.49%
Anexo 9. Planos de manufactura y ensamble.
INICIA EN LA PÁGINA SIGUIENTE POR MOTIVOS DE EDICIÓN

41

42

43

44

45

46

47