Embed Size (px)
Citation preview
ESTATIKA
c©Ugutz Garitaonaindia AntsoategiIngeniaritza Mekanikoa SailaGasteizko I.I.T. eta T.I.T.U.E.Euskal Herriko Unibertsitatea
2000/2001 ikasturtea
Indice
1. DEFINIZIOA 3
2. LOTURA DUEN PUNTU MATERIALA 3
3. LOTURA ERREAKZIOEN PRINTZIPIOA 3
4. PUNTU MATERIALAREN OREKA 44.1. PUNTU ASKEAREN OREKA. AZTERKETA ANALITIKOA . . . . . . . 44.2. GAINAZAL LEUN BATI LOTUTAKO PUNTU MATERIAL BATEN ORE-
KA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54.3. LERRO LEUN BATI LOTUTAKO PUNTU MATERIAL BATEN OREKA 84.4. EGONKORTASUNA MARRUSKADURARIK GABEKO OREKAN . . . 9
5. MARRUSKADURA DUTEN LOTURAK 105.1. GAINAZAL ZIMUR BATI LOTUA DAGOEN PUNTU BATEN OREKA . 125.2. LERRO ZIMUR BATI LOTUA DAGOEN PUNTU BATEN OREKA . . . 145.3. MARRUSKADURADUN OREKAREN EGONKORTASUNA . . . . . . . 14
6. SISTEMEN ESTATIKA 166.1. SISTEMA MATERIALEN SAILKAPENA . . . . . . . . . . . . . . . . . 166.2. LOTUREN SAILKAPENA . . . . . . . . . . . . . . . . . . . . . . . . . . 166.3. ASKATASUN MAILA ETA KOORDENATU OROKORRAK . . . . . . . 206.4. LOTURA SOILAK, BIKOITZAK ETA HIRUKOITZAK . . . . . . . . . . 22
6.4.1. LOTURA SOILAK . . . . . . . . . . . . . . . . . . . . . . . . . . 226.4.2. LOTURA BIKOITZAK . . . . . . . . . . . . . . . . . . . . . . . 226.4.3. LOTURA HIRUKOITZAK . . . . . . . . . . . . . . . . . . . . . 23
6.5. HIGIDURAREN ARABERAKO SISTEMEN SAILKAPENA . . . . . . . 23
1
INDICE 2
7. BARNE INDARREN TEOREMA 24
8. ESTATIKAREN EKUAZIO UNIBERTSALAK 25
9. SOLIDO ZURRUNAREN ESTATIKA 279.1. LOTURA DUEN SOLIDO ZURRUNAREN AZTERKETA ESTATIKOA . 28
9.1.1. PUNTU FINKO BAT DUEN SOLIDO ZURRUNA . . . . . . . . . 299.1.2. ARDATZ FINKO BAT DUEN SOLIDO ZURRUNA . . . . . . . . 309.1.3. PLANO BATEAN BERMATUA DAGOEN SOLIDO ZURRUNA . 319.1.4. BI PLANOTAN BERMATUA DAGOEN SOLIDO ZURRUNA . . 349.1.5. PLANO BATEAN BERMATU ETA PUNTU FINKO BAT DUEN
SOLIDO ZURRUNA . . . . . . . . . . . . . . . . . . . . . . . . . 34
10. GRAFOSTATIKA 3610.1. POLIGONO FUNIKULARRA ETA INDARREN EDO VARIGNON-EN POLIGONOA 36
11. BERMAPUNTUETAKO ERREAKZIOEN EDO LOTURA INDARREN KALKU-LU GRAFIKOA 3711.1. INDAR PARALELOEN SISTEMA . . . . . . . . . . . . . . . . . . . . . 3711.2. PARALELOAK EZ DIREN LOTURA INDARREN KALKULUA . . . . . 3811.3. ARDATZ POLARRA EDO CULLMAN-EN LERRO ZUZENA . . . . . . 40
12. SOLIDO FUNIKULARREN ESTATIKA. DEFINIZIOA 41
13. SOLIDO FUNIKULARREN OREKAREN EKUAZIO BEKTORIALA. KASUBEREZIA 41
14. KABLEAREN OREKAREN EKUAZIO CARTESIAR ETA INTRINTSEKOAK 43
15. KARGA BERTIKAL JARRAIA JASATEN DUEN KABLEA 44
16. KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKO KON-STANTEA JASATEN DUEN KABLEA 4616.1. ALTURA BERDINEAN DAUDEN BERMAPUNTUAK . . . . . . . . . . 4616.2. ALTURA DESBERDINEAN DAUDEN BERMAPUNTUAK . . . . . . . 49
17. KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKO KON-STANTEA JASATEN DUEN KABLEA 5317.1. ALTUERA BERDINEAN DAUDEN BI PUNTUREN ARTEKO KATENAR-
IA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5617.2. ALTUERA DESBERDINEAN DAUDEN BI PUNTUREN ARTEKO KATE-
NARIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
18. LAN BIRTUALEN PRINTZIPIOA 60
3 LOTURA ERREAKZIOEN PRINTZIPIOA 3
1. DEFINIZIOA
Estatika, sistema materialen oreka aztertzen duen mekanikaren atala da, edo beste modubatean esanda, sistena material bat geldiunean mantentzeko, aplikatuta dituen indarrek betebehar duten baldintzak aztertzen duen mekanikaren atala da.
2. LOTURA DUEN PUNTU MATERIALA
Puntu material baten higidura ez badago baldintzatuta ezein loturekin, puntua aske da-goela esaten da. Kasu honetan bere kokapena zehazteko hiru koordenatu eman behar dira.Honela, hiru askatasun maila dituela esaten da.
Puntu material batek bere higidura baldintzatua izaten badu, lotura duela esaten da, etabaldintza hau ezartzen duenari lokarria edo lotura deitzen zaio.
Adibide sinple bat, lerro batean egotera derrigortua dagoen puntu materiala izan daiteke.Kasu honetan bere kokapena parametro bakarrarekin zehaztu daiteke, adibidez, lerroarengainean emandako koordenatu kurbilineoa. Ondorioz, puntu honek askatasun maila bat du.
Beste adibide bat, gainazal batean egotera derrigortua dagoen puntu materiala izan daiteke.Bere kokapena bi koordenatu kurbilineokin zehaztu daiteke, hau da, bi askatasun maila izan-gu du.
3. LOTURA ERREAKZIOEN PRINTZIPIOA
Bedi lotura jakin bat duen A puntu materiala. Puntu honek indar sistema bat jasaten du,non honen erresultantea ~F den.
Puntu honek loturarenbat izaten badu, eta ondorioz bere higidura baldintzatua, ~F indar-raren aplikazioaren ondorioz, ez du jasango askea izango balitz izango lukeen higidura berdi-na. Beraz, puntu materialak dituen loturak erreakzio indarrengatik ordezkatuak izan daitezke.
Arrazoi honengatik ondorioztatzen da lotura erreakzioen printzipioa:
Lotura jakin bat duen puntu materialak, indar sistema bat aplikatua izaten badu, lotureneragina erreakzio indar batzuengatik ordezkatu daiteke.
Erreakzio indar hauen oinarrizko ezaugarriak hurrengo hauek dira:
1. Aplikatutako indarren araberakoak dira, eta hauen modulua lotura idealetan mugagabeaizan daiteke.
2. Aplikatutako indarrak anulatu egiten badira, erreakzio indarrak ere anulatu egingo dira.
4 PUNTU MATERIALAREN OREKA 4
3. Erreakzio indarrek berez ez dute higidurarik sortzen.
Puntu materialean aplikatutako indar sistemaren erresultantea ~F izaten bada, eta ~R loturaedo erreakzio indarra, dinamikaren oinarrizko ekuazioa honela espresatu daiteke:
~F + ~R = m · ~aEkuazio honen bidez erreakzio indarra ~R kalkulatu ahal izango dugu; aplikatutako indar-
rak, puntuaren masa eta higidura legearen arabera.
4. PUNTU MATERIALAREN OREKA
Puntu material baten eragiten duten indarrak orekan daude, puntua geldiunean man-tentzen dutenean edo ez diotenean abiadura aldaketa eragiten.
Ondorioz, puntu materiala geldiunean egongo da hurrengo baldintza betetzen denean:
~F + ~R = ~0
Puntu materiala askea izaten bada, hau da, ez badu inongo loturarik ~R = ~0 izango da, etaaurreko ekuazio honela geratzen zaigu:
~F = ~0
Hau da, kasu honetan aplikatutako indarren erresultantea zero izan behar da.
Orain, puntu materialak lotura izaten badu ~R 6= ~0 izango da, eta ondorioz:
~F = −~R
Hau da, lotura duten puntu materialek orekan mantentzeko bete behar duten baldintza,aplikatutako indarren erresultantea eta lotura indarren erresultantea aurkakoak izatea da.
4.1. PUNTU ASKEAREN OREKA. AZTERKETA ANALITIKOA
Ikusi dugun bezala, kasu honetan puntu materiala orekan mantentzeko bete behar denbaldintza, aplikatutako indarren erresultantea zero izatea da:
~F = ~F1 + ~F2 + · · ·+ ~Fi + · · ·+ ~Fn = ~0
Indar hauek erreferentzia sistemaren hiru norabide nagusietan deskonposatzen badira, etahauetako edozein indarren osagaiak Fxi, Fyi eta Fzi bezala errepresentatzen baditugu:
Fx =i=n∑
i=1
Fxi = 0
Fy =i=n∑
i=1
Fyi = 0
Fz =i=n∑
i=1
Fzi = 0

4 PUNTU MATERIALAREN OREKA 5
4.2. GAINAZAL LEUN BATI LOTUTAKO PUNTU MATERIAL BAT-EN OREKA
Puntu material batek gainazal batekin izan dezaken lotura bi motakoa izan daitekeelasuposatuko dugu:
1. Bi aldetako lotura: Kasu honetan puntua derrigortuta dago une oro gainazalarekin kon-taktuan egotera.
2. Alde bateko lotura: Kasu honetan aldiz, puntua gainazalak mugatzen dituen erdies-pazio batean mugitu daiteke, gainazalarekin kontaktuan egon ala ez.
Jarraian bi lotura mota hauek aztertuko ditugu:
1. Bi aldetako lotura.
A puntuak ezin duenez izan higidurarik gainazalarekiko norabide normalean,puntu horretan gainazalarekiko norabide normala ~η duen erreakzio indarrasortuko da, erreakzio honek aplikatutako indarraren aurkako norantza izan-go duelarik. Beraz:
η�
A
Figura 1: Gainazal batekiko bi aldeko lotura duen puntu materiala.
~F ± R ~η = ~0, honek esan nahi du ~F eta ~η lerrokideak izan behar dutela,ondorioz:
~F ∧ ~η = ~0
Hau da, gainazal batekiko bi aldeko lotura duen puntu bat orekan egongoda, aplikatutako indarren erresultanteak gainazalarekiko norabide normaladuenean.
2. Alde bateko lotura.
Aplikatutako indarren erresultantea bi norabidetan deskonposatzen dugu:bata gainazalarekiko tangente eta bestea elkarzut.
Norabide tangentea duen osagaiak, puntua gainazaletik mugiarazten du, be-raz puntua orekan mantentzeko osagai hau zero izan behar da.

4 PUNTU MATERIALAREN OREKA 6
Gainazalarekiko norabide normala duen osagaiak puntua mugitu ezin daite-keen erdiespazioarekiko bultzatu behar du. Honek esan nahi du aplikatutakoindarraren osagai normalak, eta puntua mugitu daitekeen erdiespazioarennorabidea definitzen duen bektore normal unitarioak aurkako norantza izanbehar dutela.
Bi baldintza hauek analitikoki honela adierazten dira:
~F ∧ ~η = ~0 eta ~F · ~η < 0
F�
ηF�
τF�
η�
A
Figura 2: Gainazal batekiko alde bateko lotura duen puntu materiala.
Analitikoki hurrengo planteamendua egingo dugu. Lehengo ~F indarra hirunorabide nagusietan deskonposatuko dugu:
~F = Fx~i + Fy
~j + Fz~k, non:
Fx =i=n∑
i=1
Fxi ; Fy =i=n∑
i=1
Fyi ; Fz =i=n∑
i=1
Fzi
Honela, gainazalaren ekuazio analitikoa modu honetan errepresentatzen ba-da f(x, y, z) = 0, gainazal honekiko une guztietan normala den bektoreunitarioa:
~η = γ1~i+γ2
~j+γ3~k =
1√√√√
(
∂f
∂x
)2
+
(
∂f
∂y
)2
+
(
∂f
∂z
)2·(
∂f
∂x~i+
∂f
∂y~j+
∂f
∂z~k
)
Non γ1, γ2 eta γ3 parametroak ~η bektorearen kosinu zuzentzaileak diren, etahauen balioa:

4 PUNTU MATERIALAREN OREKA 7
γ1 =
∂f∂x
√√√√
(
∂f
∂x
)2
+
(
∂f
∂y
)2
+
(
∂f
∂z
)2=
∂f∂x4
γ2 =
∂f∂y
√√√√
(
∂f
∂x
)2
+
(
∂f
∂y
)2
+
(
∂f
∂z
)2=
∂f∂y
4
γ3 =
∂f∂z
√√√√
(
∂f
∂x
)2
+
(
∂f
∂y
)2
+
(
∂f
∂z
)2=
∂f∂z4
Orain, ~R eta ~η bektoreak lerrokideak izan behar dutenez, eta ~η unitarioadenez: ~R = R · ~η.
~R = R4
∂f∂x
~i + R4
∂f∂y
~j + R4
∂f∂z
~k ,eta R4 = λ eginez:
~R = λ ∂f∂x
~i + λ ∂f∂y
~j + λ ∂f∂z
~k
Jarraian, oreka baldintzak aplikatuz, ~F + ~R = ~0:
(
Fx + λ∂f∂x
)
~i +
(
Fy + λ∂f∂y
)
~j +
(
Fz + λ∂f∂z
)
~k = ~0
Hau da, hiru ekuazio hauek:
Fx + λ∂f∂x = 0
Fy + λ ∂f∂y = 0
Fz + λ∂f∂z = 0
Eta f(x, y, z) = 0 ekuaziak, lau parametro ezezagunekin (λ, x, y, z) os-atutako sistema bat egiten dute. Honela oreka kokapena kalkulatu daitekeA(x, y, z) eta erreakzioen balioa λ kalkulatu ondoren.
4 PUNTU MATERIALAREN OREKA 8
4.3. LERRO LEUN BATI LOTUTAKO PUNTU MATERIAL BATENOREKA
Kasu honetan oreka existitzeko aplikatutako indarren erresultantea ~F , lerro honen tan-gentearekiko elkarzut izan behar du, bestela, norabide tangentziala duen osagaiak puntualerroan zehar desplazatuko lukeelako.
Lerroaren norabide tangentea definitzen duen bektore unitarioa ~τ izaten bada, bete be-harreko baldintza, ~F · ~τ = 0 da.
Jarraian azterketa analitikoa egingo dugu, honetarako lerroaren ekuazioa f1 eta f2 funtzioekdefinitzen duten azaleren elkargunea bezala ematen dela suposatzen badugu:
f1(x, y, z) = 0 eta f2(x, y, z) = 0.
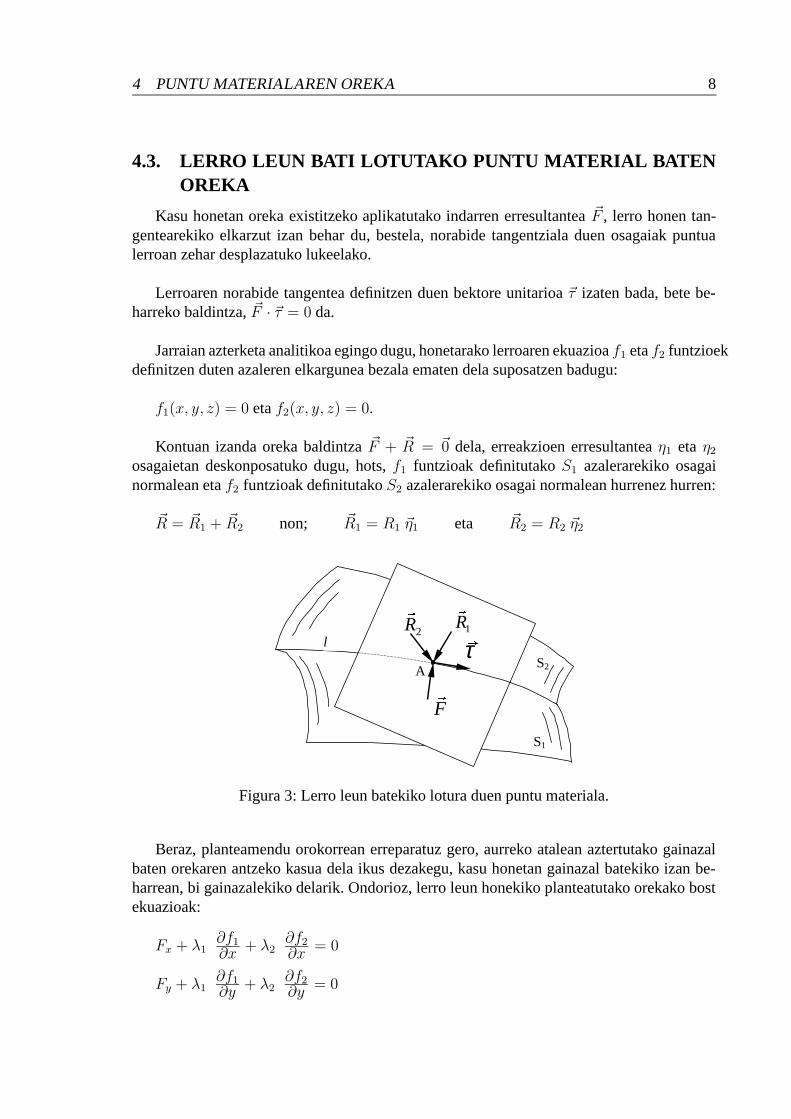
Kontuan izanda oreka baldintza ~F + ~R = ~0 dela, erreakzioen erresultantea η1 eta η2
osagaietan deskonposatuko dugu, hots, f1 funtzioak definitutako S1 azalerarekiko osagainormalean eta f2 funtzioak definitutako S2 azalerarekiko osagai normalean hurrenez hurren:
~R = ~R1 + ~R2 non; ~R1 = R1 ~η1 eta ~R2 = R2 ~η2
A
l
S1
S2
2R�
1R�
F�
τ�
Figura 3: Lerro leun batekiko lotura duen puntu materiala.
Beraz, planteamendu orokorrean erreparatuz gero, aurreko atalean aztertutako gainazalbaten orekaren antzeko kasua dela ikus dezakegu, kasu honetan gainazal batekiko izan be-harrean, bi gainazalekiko delarik. Ondorioz, lerro leun honekiko planteatutako orekako bostekuazioak:
Fx + λ1∂f1
∂x+ λ2
∂f2
∂x= 0
Fy + λ1∂f1
∂y + λ2∂f2
∂y = 0

4 PUNTU MATERIALAREN OREKA 9
Fz + λ1∂f1
∂z + λ2∂f2
∂z = 0
f1(x, y, z) = 0
f2(x, y, z) = 0
Kasu honetan bost parametro ezezagunekin (λ1, λ2, x, y, z) osatutako sistema planteatzenda, non λ1 = R1
41
eta λ2 = R2
42
nomenklatura erabiliz, ~R1 eta ~R2 osagaiak kalkulatu ahal dira,
eta ondorioz, ~R erreakzioen erresultantea.
4.4. EGONKORTASUNA MARRUSKADURARIK GABEKO OREKAN
Puntu bat oreka egonkorrean dagoela esaten da, bere oreka kokapenetik ds bat desplazatzendugunean, puntuak hasierako kokapena berreskuratzeko joera duenean.
Aldiz, puntuak oreka kokapenetik hurruntzeko joera duenean, bere orekaren izaera eze-gonkorra dela esango genuke.
Azkenik, puntuak kokapen berrian pausagunean geratzeko joera izaten badu, oreka axo-lagabe baten aurrean egongo ginateke.
Egonkorra Ez egonkorra Axolagabea
Figura 4: Oreka mota desberdinak.
Puntu materialean aplikatuta dauden indarren erresultantea konstantea denean edo pun-tuaren kokapen geometrikoaren araberakoa, oreka kokapenean duen osagai tangentziala Fτ
zero da.
Honela,4S desplazamentu batentzat, osagai tangentzialak4Fτ balioa hartuko du.
Oreka egonkorra izaten bada 4Fτ
4S< 0; eta limitean dFτ
dS< 0.
Oreka ezegonkorra denean 4Fτ
4S> 0; eta limitean dFτ
dS> 0.
Eta oreka axolagabean 4Fτ
4S= 0; eta limitean dFτ
dS= 0.
5 MARRUSKADURA DUTEN LOTURAK 10
5. MARRUSKADURA DUTEN LOTURAK
Orain arte ikusitako lotura guztiak leunak izan dira. Puntuak gainazal batekin lotua da-goenean sortzen diren erreakzioak, gainazalarekiko ortogonalak direla ikusi dugu. Era bere-an, puntu materiala lerro leun batekin lotua dagoenean, erreakzio indarra lerro honekikoelkarzut den planoan dagoela ikusi dugu.
Marruskadura duten loturetan, erreakzio indarra ez da gainazalarekiko normala, kasuhauetan osagai normala ~Rη eta tangentziala ~Rτ existituko da.
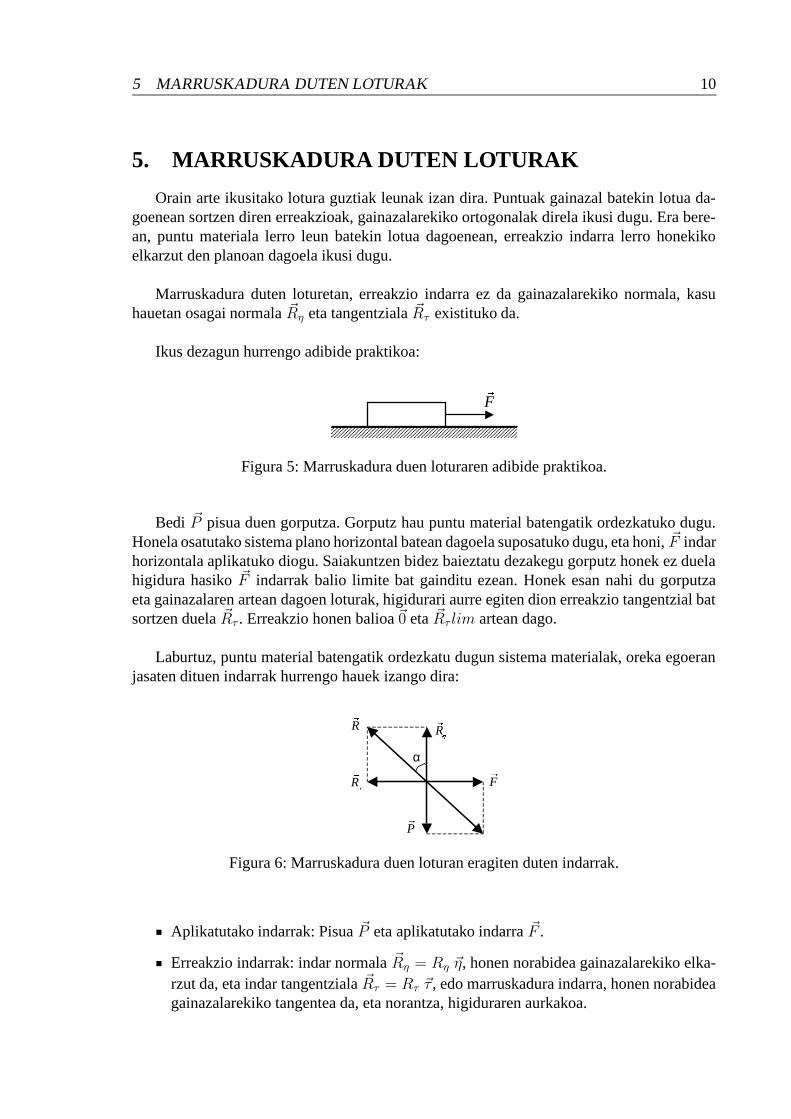
Ikus dezagun hurrengo adibide praktikoa:
F�
Figura 5: Marruskadura duen loturaren adibide praktikoa.
Bedi ~P pisua duen gorputza. Gorputz hau puntu material batengatik ordezkatuko dugu.Honela osatutako sistema plano horizontal batean dagoela suposatuko dugu, eta honi, ~F indarhorizontala aplikatuko diogu. Saiakuntzen bidez baieztatu dezakegu gorputz honek ez duelahigidura hasiko ~F indarrak balio limite bat gainditu ezean. Honek esan nahi du gorputzaeta gainazalaren artean dagoen loturak, higidurari aurre egiten dion erreakzio tangentzial batsortzen duela ~Rτ . Erreakzio honen balioa ~0 eta ~Rτ lim artean dago.
Laburtuz, puntu material batengatik ordezkatu dugun sistema materialak, oreka egoeranjasaten dituen indarrak hurrengo hauek izango dira:
α
F�
P�
R�
�R�
�R�
Figura 6: Marruskadura duen loturan eragiten duten indarrak.
Aplikatutako indarrak: Pisua ~P eta aplikatutako indarra ~F .
Erreakzio indarrak: indar normala ~Rη = Rη ~η, honen norabidea gainazalarekiko elka-rzut da, eta indar tangentziala ~Rτ = Rτ ~τ , edo marruskadura indarra, honen norabideagainazalarekiko tangentea da, eta norantza, higiduraren aurkakoa.

5 MARRUSKADURA DUTEN LOTURAK 11
Oreka egoeran hurrengo berdinketak betetzen dira: ~Rτ = −~F eta ~Rη = −~P
Carlos Agustin Coulomb-ek sakonki aztertu zuen marruskadura fenomeno fisikoa, etamarruskadura indarrentzat hurrengo legeak finkatu zituen:
1. Kontaktuan dauden gainazalen motaren araberakoa da, hau da; materiala, akabera edogainazalaren zimurtasuna, lubrifikazio maila, eta abar.
2. Kontaktuko gainazalen azalerarekiko independentea da, eta baita higiduraren kasuangainazal hauen artean dagoen abiadura erlatiboarekiko. Hala ere, marruskadurarenbalioa aldatu egiten da pausagune egoeratik higidura egoerara pasatzen denean.
3. Pausagune egoeratik higidura egoerara pasatzen den unean, marruskadura indarrarenbalioa ~Rτ lim izango da. Indar honen modulua, erreakzioko indar normalarekiko ~Rη
zuzenki proportzionala da.
~Rτ lim = µe~Rη, non; 0 < µe < 1
Honela, µe marruskadura estatikoaren koefizientea da, eta bere balioa:
µe =~Rτ lim
~Rη
= tan ϕ
Bestalde, µe parametroak, kono baten ardatzak bere sortzaileekiko osatzen duen an-geluaren tangentea adierazten du. Konoaren ardatzak loturaren norabide normala du.Puntu materiala pausagunean mantenduko da, aplikatutako indarren erresultantea ~Feta ondorioz, loturako indar erresultantea ~R = ~Rη + ~Rτ , kono honen barnean man-tentzen denean.
4. Egoera ez estatikoan, hau da, sistema materiala higiduran dagoenean, erreakzio tan-gentzialaren ~Rτ modulua:
~Rτ = µc~Rη, non; 0 < µc < 1
Kasu honetan µc marruskadura zinetikoaren modulua da. Koefiziente honekin ere,marruskadura estatikoaren moduluarekin gertatzen den bezala, gainazalaren araberabere balioa aldatu egiten da.
Orokorrean µe > µc izaten da.
Marruskaduraren inguruan Coulomb-ek egindako azterketen ondoren, Airn eta Petroffikerlariek Coulombek egoera ez estatikoarentzat, hau da higidura egoerarentzat emandakolegeak zuzendu zituzten, hurrengo legeak finkatuz:
5 MARRUSKADURA DUTEN LOTURAK 12
F�
τR�
limRτ
�
R�
ηR�
ϕα
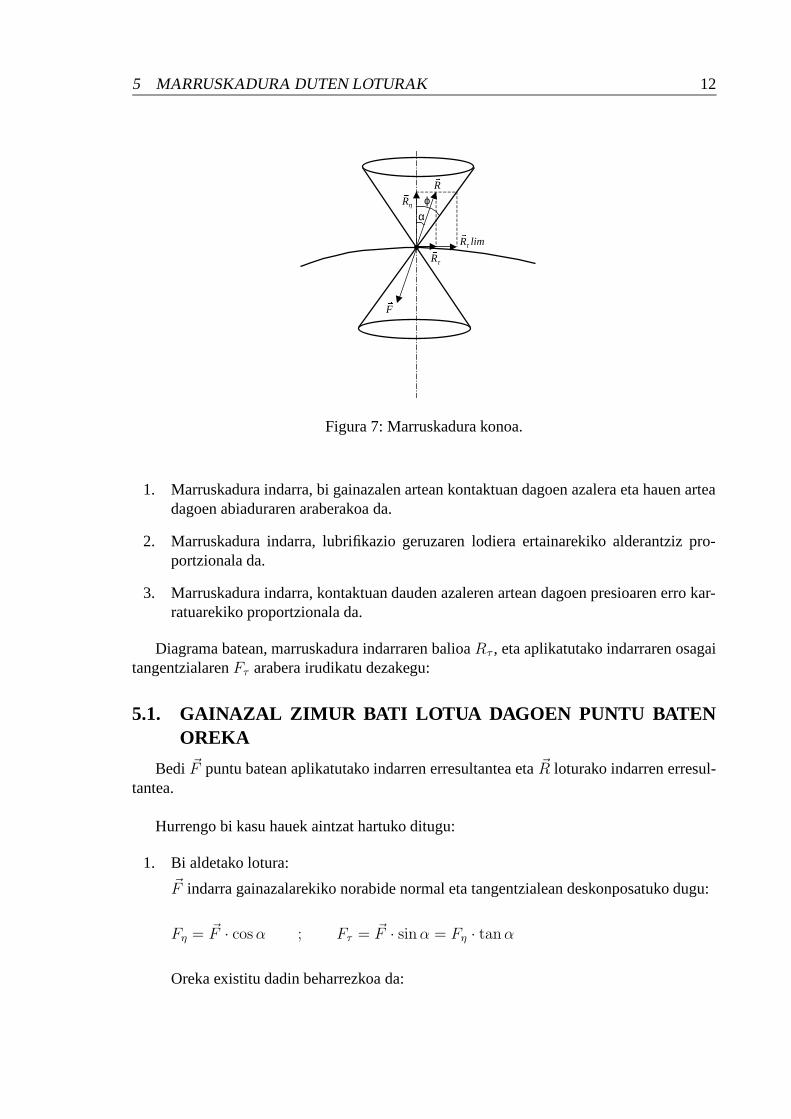
Figura 7: Marruskadura konoa.
1. Marruskadura indarra, bi gainazalen artean kontaktuan dagoen azalera eta hauen arteadagoen abiaduraren araberakoa da.
2. Marruskadura indarra, lubrifikazio geruzaren lodiera ertainarekiko alderantziz pro-portzionala da.
3. Marruskadura indarra, kontaktuan dauden azaleren artean dagoen presioaren erro kar-ratuarekiko proportzionala da.
Diagrama batean, marruskadura indarraren balioa Rτ , eta aplikatutako indarraren osagaitangentzialaren Fτ arabera irudikatu dezakegu:
5.1. GAINAZAL ZIMUR BATI LOTUA DAGOEN PUNTU BATENOREKA
Bedi ~F puntu batean aplikatutako indarren erresultantea eta ~R loturako indarren erresul-tantea.
Hurrengo bi kasu hauek aintzat hartuko ditugu:
1. Bi aldetako lotura:~F indarra gainazalarekiko norabide normal eta tangentzialean deskonposatuko dugu:
Fη = ~F · cos α ; Fτ = ~F · sin α = Fη · tan α
Oreka existitu dadin beharrezkoa da:
5 MARRUSKADURA DUTEN LOTURAK 13
Pausagunetik higidurara
pasatzen den unea
Rτlim=µe Rη
Fτ(Aplikatutako indartangentziala)
Rτ(Marruskadura indarra)
IdealaErreala
Egoeraestatikoa
Higiduraegoera
µc Rη
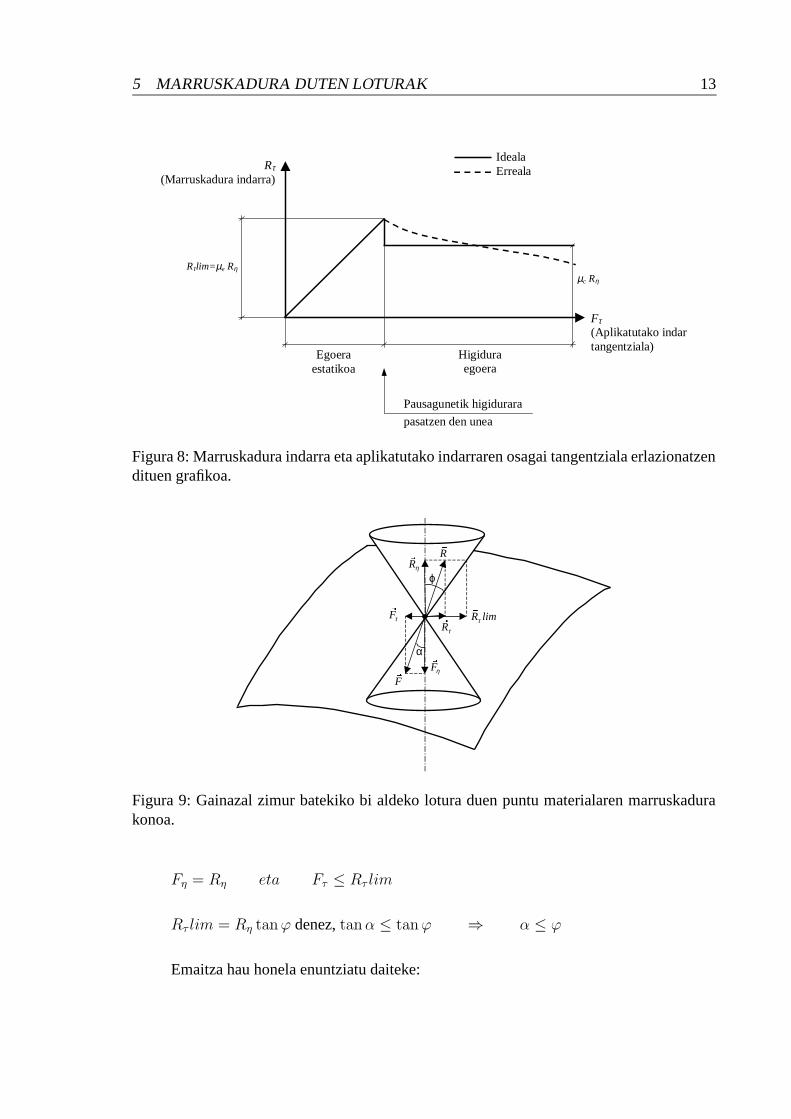
Figura 8: Marruskadura indarra eta aplikatutako indarraren osagai tangentziala erlazionatzendituen grafikoa.
R�
ηR�
ηF�
limRτ
�
τR�τF
�
F�
ϕ
α
Figura 9: Gainazal zimur batekiko bi aldeko lotura duen puntu materialaren marruskadurakonoa.
Fη = Rη eta Fτ ≤ Rτ lim
Rτ lim = Rη tanϕ denez, tan α ≤ tan ϕ ⇒ α ≤ ϕ
Emaitza hau honela enuntziatu daiteke:
5 MARRUSKADURA DUTEN LOTURAK 14
Gainazal zimur batekin bi aldetako lotura duen puntu batek oreka egoera izango du,aplikatutako indarren erresultanteak norabide normalarekin osatzen duen α angelua, ϕangelua baino txikiagoa denean.
Edo beste modu batera esanda; gainazal zimur batekin bi aldetako lotura duen puntubat orekan mantenduko da, aplikatutako indarren erresultantea marruskadura konoarenbarnean dagoenean.
2. Alde bateko lotura:
Kasu honetan aurreko atalean bete behar den baldintzaz gain, aplikatutako indarrenerresultanteak gainazalaren aldeko norabidea izan behar du:
~F · ~η < 0
5.2. LERRO ZIMUR BATI LOTUA DAGOEN PUNTU BATEN ORE-KA
Lerro honetan, ~τ bektorearekin definitua dagoen norabide tangentziala, eta bektore honekikonormala den planoa definituko dugu.
Aplikatutako indarren erresultantea ~F ; norabide tangentzialean ~Fτ eta plano normalean~Fη dituen osagaiekin deskonposatu daiteke.
Era berean, erreakzioko indarra ~R norabide tangentzial eta normalean deskonposatuaizan daiteke: ~Rτ eta ~Rη .
Orain ~F indarraren norabidea aldatu egiten bada, hainbat kono osatuko dira, kono hauekera berean beste bat osatzen dutelarik. Honela, higidurarik ez egoteko baldintza, aplikatutakoindarren erresultantea ~F , azken kono honen kanpoan egotea da.
5.3. MARRUSKADURADUN OREKAREN EGONKORTASUNA
Lerro edo gainazal zimur bati lotua dagoen puntu batek oreka mantentzeko bete beharden baldintza:
Fτ ≤ Rτ lim, edo berdina dena; Fτ −Rτ lim ≤ 0.
Fτ −Rτ lim > 0 izaten bada, puntu honek higidura izango du, eta bere azelerazioa:
a =Fτ − Rτ
m
Non, m puntu materialaren masa den.
5 MARRUSKADURA DUTEN LOTURAK 15
F�
τR�
limRτ
�
ηR�
R�
ϕ
α
90 - ϕ
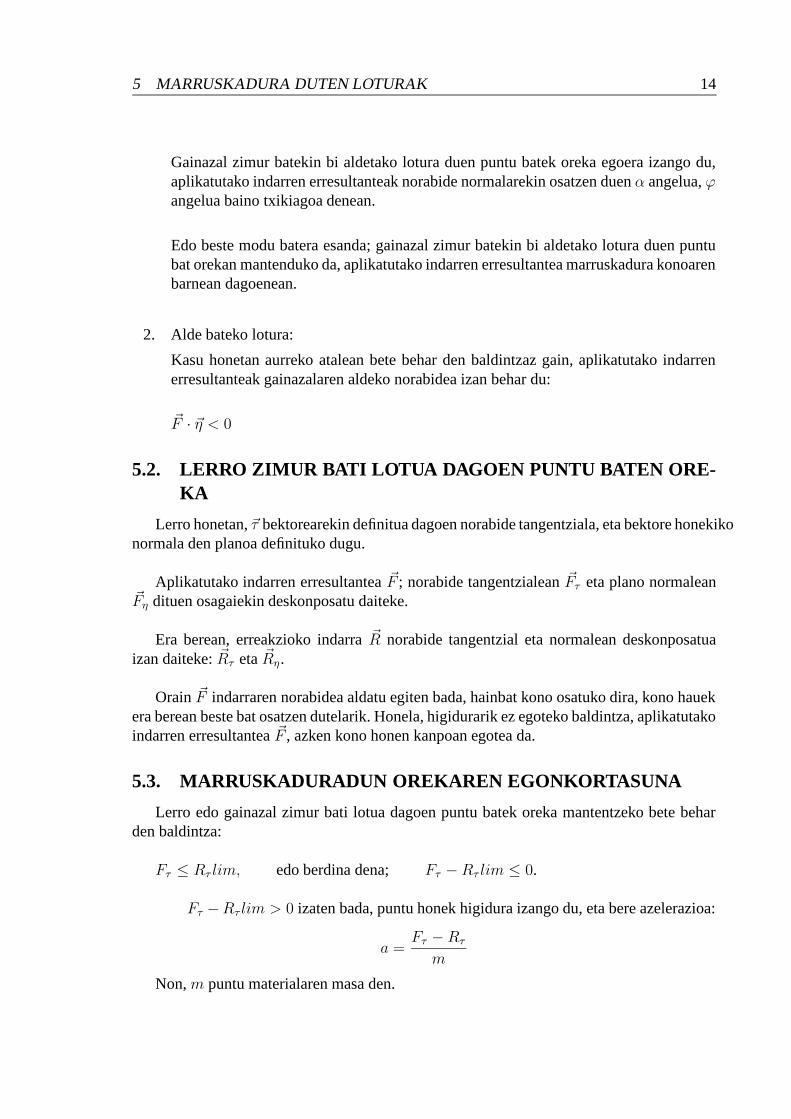
Figura 10: Lerro zimur bati lotuta dagoen puntu materialaren marruskadura konoa.
Rτ lim = µe Rη = µe Fη denez, Fτ − µe Fη ≤ 0 ; µe Fη − Fτ ≥ 0.
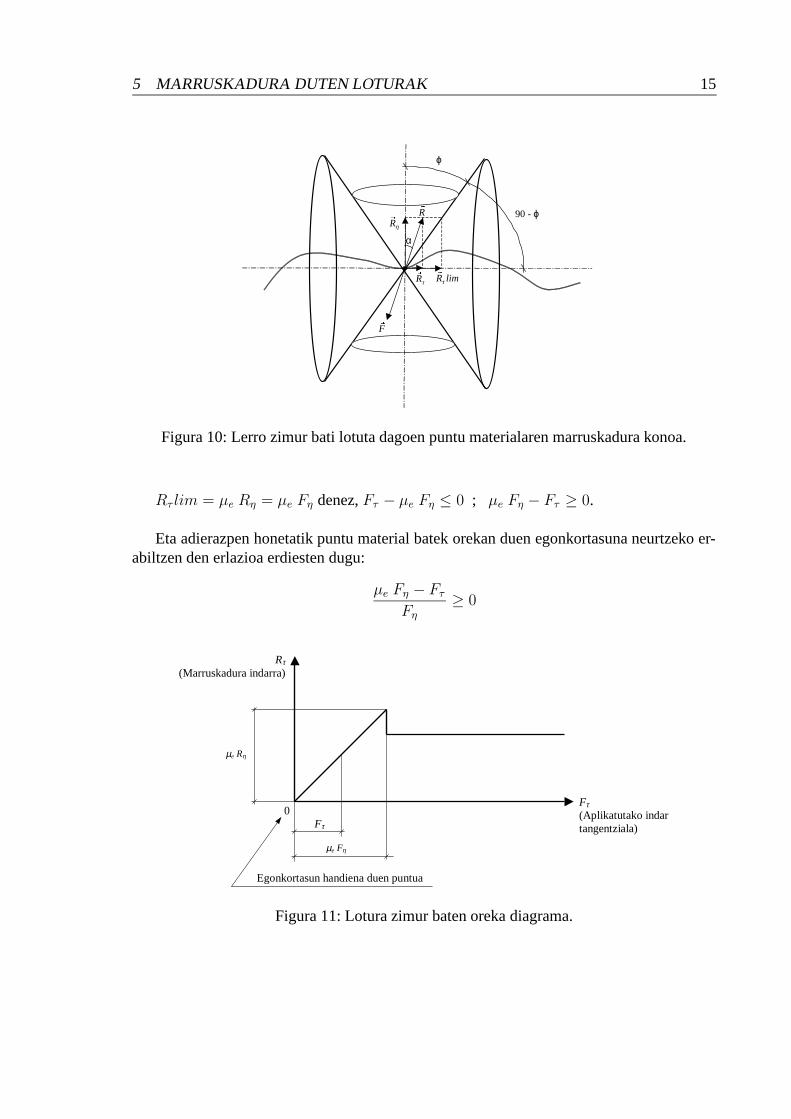
Eta adierazpen honetatik puntu material batek orekan duen egonkortasuna neurtzeko er-abiltzen den erlazioa erdiesten dugu:
µe Fη − Fτ
Fη
≥ 0
µe Fη
Egonkortasun handiena duen puntua
µe Rη
Fτ(Aplikatutako indartangentziala)
Rτ(Marruskadura indarra)
Fτ
0
Figura 11: Lotura zimur baten oreka diagrama.
6 SISTEMEN ESTATIKA 16
6. SISTEMEN ESTATIKA
6.1. SISTEMA MATERIALEN SAILKAPENA
Sistema bat puntu materialez osatutako konjuntu bat bezala definitzen dugu. Puntu hauekduten loturaren arabera sitema desberdinak definitu daitezkelarik.
Honela, sistema bat osatzen duten puntuen artean, aplikatutako indarrak edozein direlaere, ez bada beraien arteko distantzia aldatzen, sistema zurruna dela esaten da. Alderantz-izkoa gertatzen bada, sistema deformagarria da.
Sistema bat jarraia izango da, sistemaren bi edozein punturen artean, beti aurkitu ditza-kegunean sistemakoak diren beste puntu batzuk. Aurkakoa gertatzen bada, sistema ez jarraibat izango da.
Sistema jarrai bat homogeneoa izango da, puntu guztiek duten dentsitatea konstante man-tentzen denean.
Sistema jarrai bat isotropoa da, norabide guztietan ezaugarri berdinak izaten baditu.Alderantzizko kasuan, anisotropoa dela esango dugu.
6.2. LOTUREN SAILKAPENA
Hauek dira sistema material batek izan ditzaken lotura motak:
1. Barnekoak:
Barne loturak, sistema materialaren bi punturen higidura erlatiboa mugatzen dutenakdira.
2. Kanpokoak:
Kanpoko loturak, sistemaren higidura askea kanpo erreferentziekiko mugatzen dute-nak dira.
3. Zinematikoak
Lotura zinematikoak aplikatutako indarrengatik independenteak dira. Adibidez, gidarileun bat. Aldi berean, lotura zinematikoak honela sailkatu daitezke:
a) Lehenengo mailakoak: Lehenengo mailako lotura zinematikoak dira, denborarenaraberako funtzio batekin eta q parametro finitu kopuru batekin espresatu daite-keenean. Lotura bi aldekoa denean:
fk(q1, q2, . . . , qn, t) = 0
6 SISTEMEN ESTATIKA 17
Bestalde, lotura alde batekoa denean, bi modu hauetan espresatu daiteke:
fk(q1, q2, . . . , qn, t) ≤ 0
fk(q1, q2, . . . , qn, t) ≥ 0
fk funtzioek kopuru finitua, jarraiak eta deribagarriak izan behar dute.
q1, q2, . . . , qn parametroei koordenatu orokortuak edo lagrangearrak deitzen zaie.Hauek une konkretu bakoitzean sistemaren konfigurazioa zehazten dutelarik. Lehenen-go mailako bi aldetako loturaren adibide bat, r erradioa duen gainazal esferikobatean mugitzera derrigortua dagoen puntuarena izan daiteke.
Hurrengo ekuazioak x2 + y2 + z2− r2 = 0 adierazten du lotura hau, non x, y etaz lehen definitutako q parametroak diren.
Adibide honetan puntuaren kokapena hasiera batean hiru koordenatukin zehaz-tu daiteke, baina lotura ekuazioa aplikatu ondoren bere kokapena bi parametroezagutuz finkatzen da.
Bestalde, lehenengo mailako alde bateko loturaren adibide bat, gainazal esferikobaten gainetik mugitzera behartuta dagoen puntu materialaren adibidea izan daiteke.Lotura hau hurrengo ekuazioarekin adierazi daiteke:
x2 + y2 + z2 ≥ r2
Puntua esferaren gainean dagoenean; x2 + y2 + z2 = r2, ondorioz kasu honetanere bere kokapena definitzeko nahikoa izango da bi koordenatu ezagutzearekin.Baina puntua esferatik kanpo dagoenean, bere kokapena definitzeko beharrezkoakizango dira hiru parametroak ezagutzea.
Lotura bat lehenengo mailakoa eta bi aldekoa denean, holonomoa dela esaten da.
b) Bigarren mailakoak: Mota honetako ekuazio diferentzialekin definituta daudenakdira:
j=n∑
j=1
αkjdqj + βkdt = 0
Ekuazio honetako αkj eta βk parametroak, denboraren eta q parametro lagrangear-ren funtzioan daude. Ekuazio diferentzial hauek ez dira integratu behar, bestelalehenengo mailako ekuazioetan tranformatzen baitira.
6 SISTEMEN ESTATIKA 18
Ikus dezagun mota honetako loturen adibide pare bat:
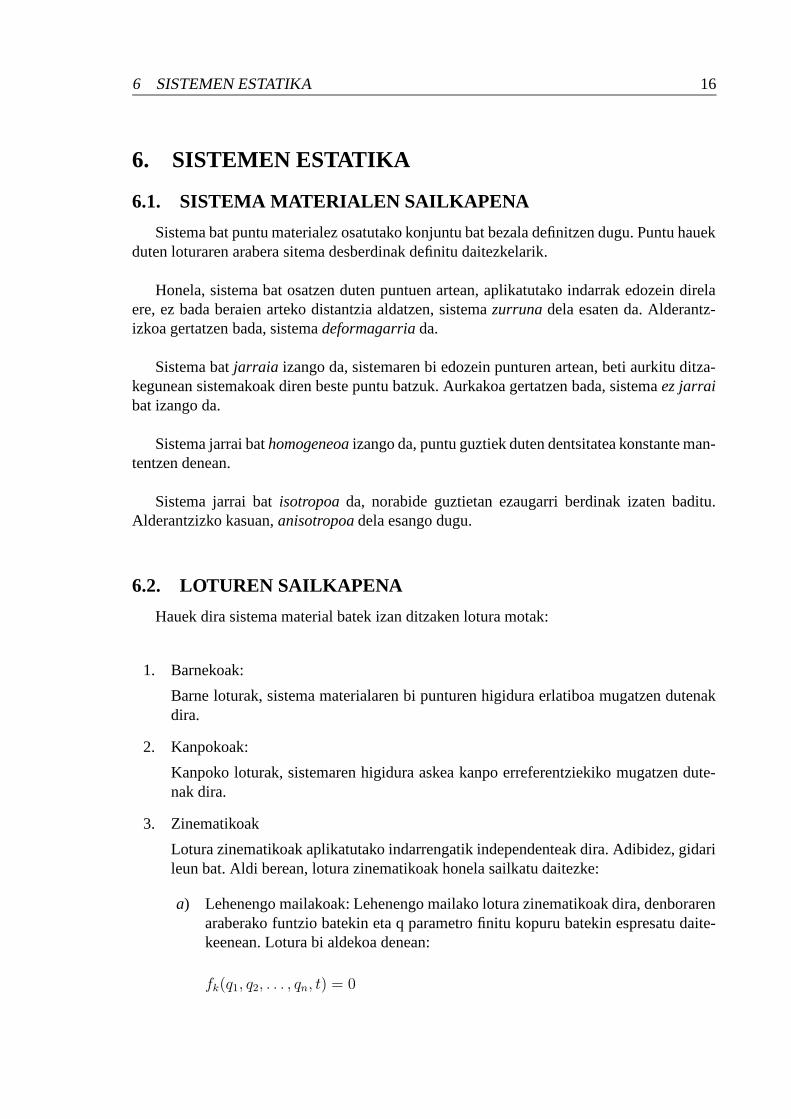
1) Disko batek deslizamendu gabeko errodadura egiten du inklinazio jakin batduen plano batean, bere ardatza une guztietan irudiko planoarekiko elkarzutmantenduz.Bere kokapena zehazteko plano honetan ibilitako S distantzia eta diskoakduen biraketa angelua θ eman behar dira. Kasu honetan S eta θ izango diraparametro lagrangearrak.
α
Sθ a
Figura 12: Lotura holonomoen adibide bat.
Errodadura deslizamendu gabekoa izaten bada, hurrengo erlazioa aplikatudaiteke:
dS − a · dθ = 0
Ekuazio hau bigarren mailako loturei dagokion bezalakoa da. Hala ere, inte-gratu egin daiteke:
S − a · θ + C = 0
Eta kasu honeta lehenengo mailako lotura batean transformatzen da. Hasierabatean diskoaren kokapena definitzeko behar izan ditugun parametroak biizan dira, eta lotura ekuazio honekin parametro batera murrizten dugu.
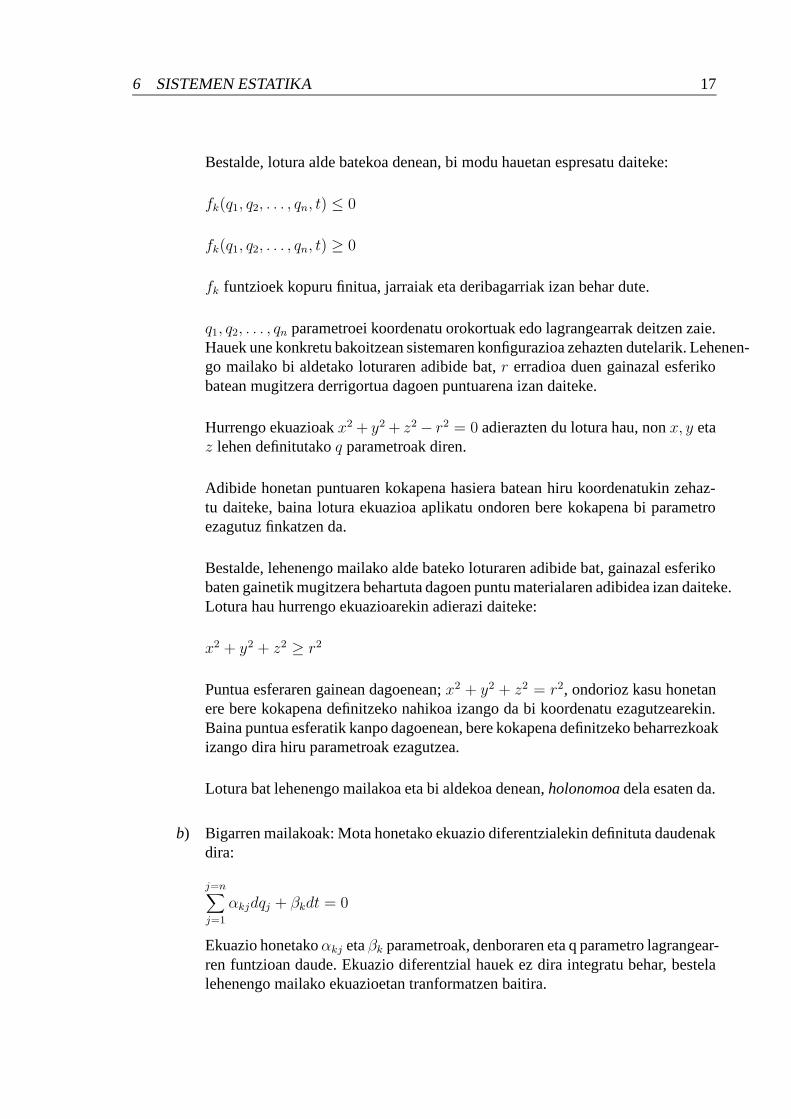
2) Disko batek deslizamendu gabeko errodadura egiten du plano horizontal bat-en gainean, diskoa une guztietan plano horizontalarekiko elkarzut egoteraderrigortua dago, eta bere ardatz bertikalaren inguruan biratzeko aukera du.
Diskoaren kokapena edozein unetan, hurrengo lau parametroekin definitudaiteke: diskoaren zentro geometrikoaren x eta y osagaiak, diskoaren planoakX ardatzarekin definitzen duen ϕ angelua eta diskoaren erradio batek, diskoanfinkatutako erreferentziako orientazio batekin osatzen duen θ angelua.
Beraz, sistema honek momentuz lau koordenatu behar ditu bere kokapenazehazteko.
6 SISTEMEN ESTATIKA 19
Y
x
ϕ
y
θ
X
a
Figura 13: Lotura ez holonomoen adibide bat.
Ikus dezagun lotura honek inposatzen dituen baldintzak zeintzuk diren:
Diskoaren zentroak duen abiadura zeiharra zero izan behar denez:
x sin ϕ + y cos ϕ = 0
Bestalde, diskoaren zentroak duen abiadura kontaktuko puntuarekiko:
x cos ϕ− y sin ϕ = a θ
Kasu honetan ezinezkoa da erlazio hauek integratzea, hau da, x, y, ϕ eta θparametroen arteko erlazioa kalkulatzea. Beraz bigarren mailako lotura batda.
Hau da, lau parametro hauek ez dute beraien artean inongo loturarik gordebeharrik, ondorioz, sistemaren kokapena definitzeko lau parametro definitzenjarraitu beharko dugu.
Laburtzeko esango dugu, bigarren mailako loturak higidurarako baldintzakinposatu egiten dutela baina ez dutela bere kokapena zehazteko behar direnparametroak murrizten.
Higiduraren baldintzak inposatu baina sistemaren kokapena definitzeko be-har diren parametroak murrizten ez duten loturei anolonomoak, ez holonomoakedo heteronomoak deitzen zaie. Ikusitakoaren arabera multzo honetan lehenen-go mailako alde bateko loturak eta bigarren mailako loturak sartzen dira.
4. Dinamikoak
Lotura dinamikoak, beraien definizioan indarrak eragiten dutenak dira. Adibidez, mal-guki batekin egindako lotura bat, edo marruskadura duen gidari bat.
5. Denborarekiko menpekoak
Lotura hauetan denboraren funtzioan dauden adierazpenak izango ditugu.
6 SISTEMEN ESTATIKA 20
Ikusi dugun bezala, lehengo zein bigarren mailako loturetan denbora eskalarra azaltzenda, nahiz eta bere presentzia ez izan guztiz beharrezkoa.
6. Denborarekiko independenteak
Sistemaren higidura definitzen duten ekuazioetan ez denean denbora azaltzen, edo bi-garren mailako loturetan gertatu daitekeen bezala, denboraren arabera dauden parametroakzero direnean.
7. Bi aldetako loturak
8. Alde bateko loturak
9. Marruskadura gabeak edo leunak
10. Marruskaduradunak edo zimurrak
Kasu honetan sistema materialak ditugunez, hurrengo azpisailkapena egin daiteke:
a) Zehazki zimurra
Lotura mota honek, kontaktuan dauden bi gorputzen artean deslizamendu gabekoerrodadura ematen dela ziurtatzen du.
b) Soilki zimurra
Kasu honetan, kontaktuan dauden bi gorputzen artean deslizamendua duen erro-dadura ematen da.
Lotura bat zehazki zimurra edo soilki zimurra izatearen desberdintasuna, eragitenduten indarren eraginpean egon daiteke. Marruskadura duten indarrek, beraz, izaeradinamikoa dute.
11. Lotura soila
12. Lotura bikoitza
13. Lotura hirukoitza
Azken hiru lotura hauek zehazteko, jarraian definitzen den askatasun mailaren kontzeptuadefinitzea komeni da.
6.3. ASKATASUN MAILA ETA KOORDENATU OROKORRAK
Puntu material baten askatasun maila (l), honek izan dezaken higidura posibleen kopu-rua da.
Puntu material askeak, espazioan izan dezaken higidura posibleak hiru dira, hiru nora-bide ortogonalei dagokiena. Honela, loturarenbat inposatuz gero, bere askatasun maila jaitsiegiten da.
6 SISTEMEN ESTATIKA 21
Honela, plano batean mugitzera behartuta dagoen puntuak bi askatasun maila izango di-tu; bi norabide ortogonalei dagokiena, eta lerro batean mugitzera behartuta dagoen puntuak,soilik askatasun maila bat izango du.
Bestalde, N puntu materialekin osatutako sistema materialei dagokienez, hauen askata-sun maila 3N − ν − h izango da. Honela, sistema materialak dituen ν lotura holonomoenkopurua izango da eta h lotura ez holonomoen kopurua. Gogoratu behar da lotura holonomozein ez holonomoak sistema materialak izan dezaken higidura murriztu egiten dutela.
Espazioan dagoen sistema material zurrun edo deformaezinak, 6 askatasun maila ditu;hiru translazio eta hiru biraketa. Solido honi loturak ezartzen bazaizkio askatasun maila jait-si egiten da.
Koordenatu orokorren edo lagrangearren kopurua (µ) konfigurazio jakin bat zehaztekobehar diren parametroen kopuru minimoa da.
Puntu material aske baten kokapena, hiru parametroekin definitzen dela ikusi dugu, hone-tarako; koordenatu cartesiarrak, zilindrikoak, esferikoak,... edo beste edozein erreferentziasistema erabili daitekelarik. Honela, bere koordenatu orokorren kopurua hiru da.
Puntu honi loturak ezartzen badiogu, koordenatu orokortuen kopurua murriztu egiten da:
Adibidez, puntu baten higidura plano batean izatera derrigortzen badugu, bere kokapenabi parametroekin finkatu dezakegu (cartesiarrak, polarrak, eta abar), edo lerro baten egoteraderrigortzen badugu, bere kokapena soilik parametro batekin finkatu dezakegu (koordenatukurbilineo batekin).
Bestalde, N puntu materialekin osatuta dagoen sistema materialei dagokionez, hauenkonfigurazioa zehazteko behar diren koordenatu orokorren kopurua 3N − ν izango da. Nonν, sistema materialak duen lotura holonomoen kopurua den. Orain ere gogoratu behar dugu,lotura holonomoak sistema materialaren kokapena zehazterako orduan, koodenatu orokor-ren kopurua murriztu egiten dutela. Aldiz, lotura ez holonomoak, askatasun maila murriztuarren, koordenatu orokorrak ez dute murrizten.
Espazioan dagoen sistema material zurrunak 6 koordenatu orokor behar ditu bere kokape-na ondo zehazteko.
Laburtuz:
Sistema baten askatasun maila:
l = 3N − ν − h
Sistema baten koordenatu orokorren kopurua:
µ = 3N − ν
6 SISTEMEN ESTATIKA 22
Aztertzen dugun sistma puntu materiala denean, edo soilik lotura holonomoak izatenbaditu; h = 0 izango da, eta ondorioz: l = µ.
6.4. LOTURA SOILAK, BIKOITZAK ETA HIRUKOITZAK
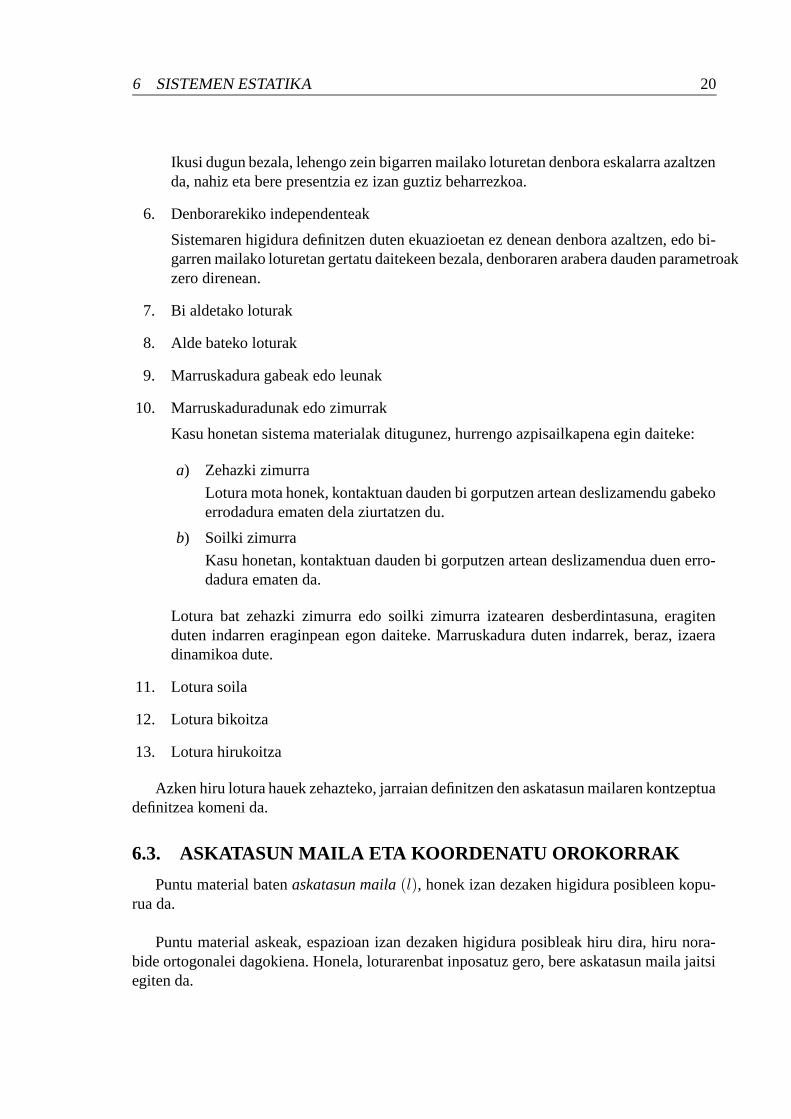
6.4.1. LOTURA SOILAK
Solidoari edo sistema materialari askatasun maila bat gutxitzen dioten loturak dira.
Geometria lauen kasuan lotura soil arruntenak biela eta bermapuntu mugikorrak dira:
R�
R�
A
B
S
A
E
Figura 14: Lotura soilen bi adibide.
Bielaren kasuan, honek lurrarekin artikulatzen du A puntuan eta solidoarekin B puntu-an. Solidoa aztertzerakoan ikus dezakegu, honen traslazioa bielaren norabidean murriztuageratu dela, eta traslazioei dagokienez, soilik bielarekiko norabide ortogonalean gauzatudaiteke. Bestalde, solidoak planoan izan dezaken biraketa ez da murriztu. Ondorioz, soli-doaren askatasun maila hirutik bira jaitsi da, eta loturan sortuko den erreakzio indarrakbielaren norabidea izango du.
Bermapuntu mugikorrak ere solidoaren askatasun maila hirutik bira jaisten du. Motahonetako loturak bi aldekoak dira, eta ondorioz, loturan sortzen den erreakzio indarra berma-puntu mugikorra dagoen planoarekiko ortogonala izango da.
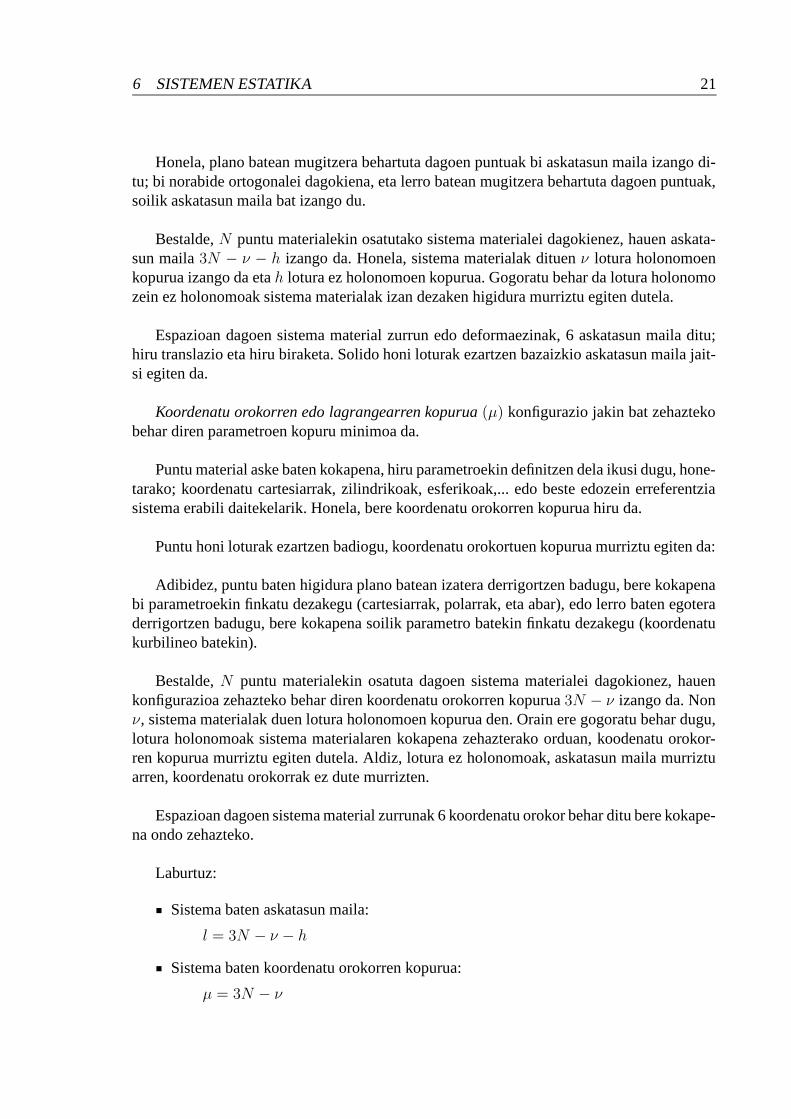
6.4.2. LOTURA BIKOITZAK
Solidoari edo sistema materialari bi askatasun maila murrizten dioten loturak dira.
Geometrial lauarekin jarraituz, mota honetako loturarik ezagunena bermapuntu finkoada. Lotura honek, bi solido desberdinetako puntuak lotzen ditu, solido hauek higiduran zeinpausagunean egon daitezkelarik.
Artikulazio finkoa duten solidoetan, erreakzio indar bat sortzen da, lotura honek bi translazioakeragozten dituelako, baina ez birakera. Jarraian, erreakzio hau bi norabide nagusietan deskon-
6 SISTEMEN ESTATIKA 23
posatu daitekeelarik.
B�
R�
H�
A
S
A
S
A
S
Figura 15: Lotura bikoitzen hiru adibide.
Sistema lauekin jarraituz, artikulazio bat bi biela edo bi artikulazio mugikorrengatik or-dezkatu daiteke, lotura hauek inposatzen duten baldintzak oinarritzat hartuz.
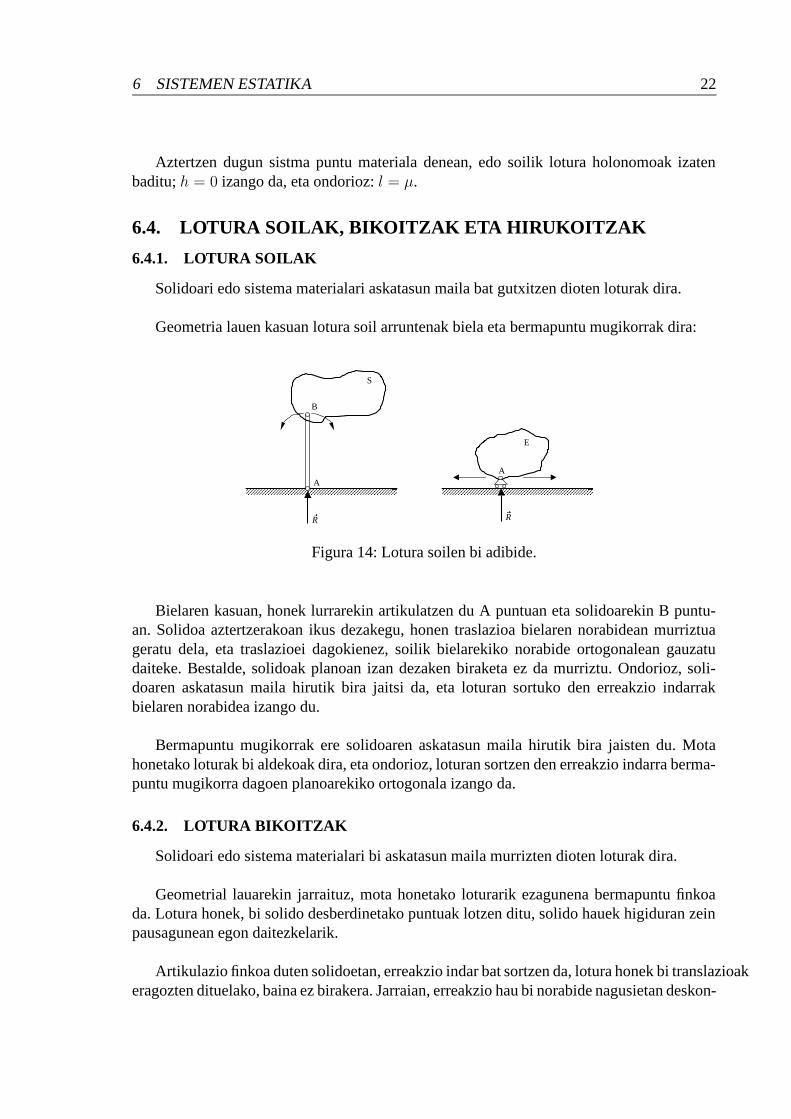
6.4.3. LOTURA HIRUKOITZAK
Solidoari hiru askatasun maila murrizten dioten loturak dira. Sistema lauei dagokionez,hauek duten askatasun maila hiru denez, mota honetako lotura bat ezartzeak, sistema honekizan dezaken edozein higidura eragoztea dakar.
Geometria lauei dagokionez, hiru askatasun maila murrizten duen lotura ezagunena lan-daketa da. Kasu honetan solidoak izan dezaken biraketa edo desplazamenduak murriztutageratzen dira.
Honen ondorioz, landaketa batean, planoarekiko ortogonala den momentu bat, eta planoanegon, baina edozein norabide duen erreakzio bat sortzen da. Honek esan nahi du, mota hone-tako loturek hiru parametro ezezagun sortarazten dutela.
Lotura hirukoitza ere lortu daiteke; lotura soil bat eta bikoitz bat konbinatuz, hiru loturasoil konbinatuz, eta abar. Hiru lotura sinple konbinatuz lotura hirukoitza lortu nahi denean,kontuan izan behar da, lotura soiletan sortzen dire erreakzio indarrak ez dutela elkar topako-rrak edo paraleloak izan behar, kasu hauetan ez litzatekeelako galeraziko higidura posibleguztiak.
6.5. HIGIDURAREN ARABERAKO SISTEMEN SAILKAPENA
1. Sistema material batek higidura izateko aukera duenean, sitema dinamikoa dela esatenda.
Honela, lau askatasun maila, hiru askatasun maila,... duten sistema dinamikoetaz hitzegingo dugu.
7 BARNE INDARREN TEOREMA 24
R�
M�
SS
Figura 16: Lotura hirukoitzen bi adibide.
Ikuspuntu teknikotik sistema interesgarrienak askatasun maila bakarra dutenak di-ra. Hauen loturak, holonomoak eta denborarekiko independenteak izan behar dire-larik. Kasu hauetan sistemaren konfigurazioa koordenatu orokor edo lagrangear bakar-rarekin definitzen da.
2. Sistema material baten askatasun maila zero izaten bada, eta loturek sortzen dutenparametro ezezagun edo erreakzioen kopurua, aplikatu daitezken ekuazioen kopuru-aren berdina izaten bada, sistema isostatikoa edo estatikoki determinatua dela esatenda.
3. Aldiz, loturetan sortzen diren erreakzioen kopurua, aplikatu daitezken ekuazioak bainokopuru handiagoa izaten bada, sistema hiperestatikoa dela esaten da.
7. BARNE INDARREN TEOREMA
Akzioa eta erreakzioaren arteko berdintasun legearen arabera, A1 puntuan eragiten duen~F12 indar bakoitzeko, A1 puntuarekiko eragina duen sistema material bereko A2 puntuan,modulu eta norabide berdina baina aurkako norantza duen ~F21 indarra sortzen da.
Esandakoaren arabera, zera ondorioztatu daiteke:
21F�
12F�
1r�
2r�
A1
A2
0
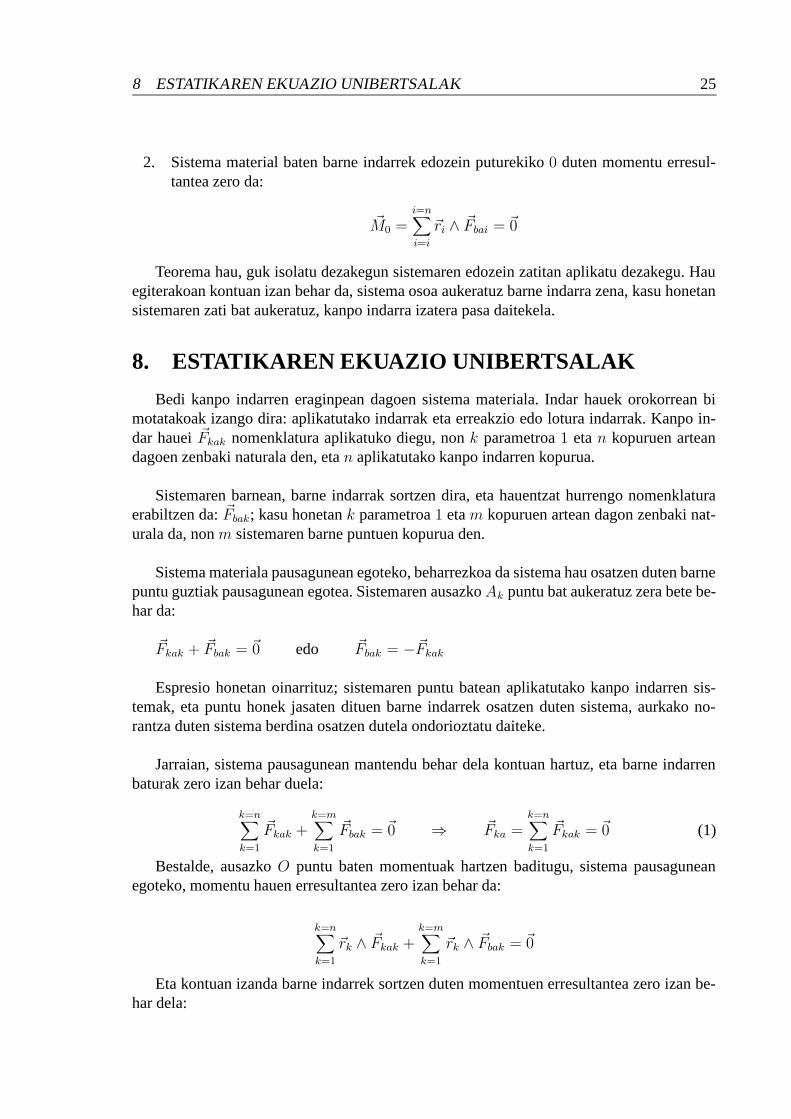
Figura 17: Sistemaren barne puntuetan aplikatutako barne indarrak.
1. Sistema material batean aplikatuta dauden barne indarren batura zero da:
i=n∑
i=i
~Fbai = ~0
8 ESTATIKAREN EKUAZIO UNIBERTSALAK 25
2. Sistema material baten barne indarrek edozein puturekiko 0 duten momentu erresul-tantea zero da:
~M0 =i=n∑
i=i
~ri ∧ ~Fbai = ~0
Teorema hau, guk isolatu dezakegun sistemaren edozein zatitan aplikatu dezakegu. Hauegiterakoan kontuan izan behar da, sistema osoa aukeratuz barne indarra zena, kasu honetansistemaren zati bat aukeratuz, kanpo indarra izatera pasa daitekela.
8. ESTATIKAREN EKUAZIO UNIBERTSALAK
Bedi kanpo indarren eraginpean dagoen sistema materiala. Indar hauek orokorrean bimotatakoak izango dira: aplikatutako indarrak eta erreakzio edo lotura indarrak. Kanpo in-dar hauei ~Fkak nomenklatura aplikatuko diegu, non k parametroa 1 eta n kopuruen arteandagoen zenbaki naturala den, eta n aplikatutako kanpo indarren kopurua.
Sistemaren barnean, barne indarrak sortzen dira, eta hauentzat hurrengo nomenklaturaerabiltzen da: ~Fbak; kasu honetan k parametroa 1 eta m kopuruen artean dagon zenbaki nat-urala da, non m sistemaren barne puntuen kopurua den.
Sistema materiala pausagunean egoteko, beharrezkoa da sistema hau osatzen duten barnepuntu guztiak pausagunean egotea. Sistemaren ausazko Ak puntu bat aukeratuz zera bete be-har da:
~Fkak + ~Fbak = ~0 edo ~Fbak = −~Fkak
Espresio honetan oinarrituz; sistemaren puntu batean aplikatutako kanpo indarren sis-temak, eta puntu honek jasaten dituen barne indarrek osatzen duten sistema, aurkako no-rantza duten sistema berdina osatzen dutela ondorioztatu daiteke.
Jarraian, sistema pausagunean mantendu behar dela kontuan hartuz, eta barne indarrenbaturak zero izan behar duela:
k=n∑
k=1
~Fkak +k=m∑
k=1
~Fbak = ~0 ⇒ ~Fka =k=n∑
k=1
~Fkak = ~0 (1)
Bestalde, ausazko O puntu baten momentuak hartzen baditugu, sistema pausaguneanegoteko, momentu hauen erresultantea zero izan behar da:
k=n∑
k=1
~rk ∧ ~Fkak +k=m∑
k=1
~rk ∧ ~Fbak = ~0
Eta kontuan izanda barne indarrek sortzen duten momentuen erresultantea zero izan be-har dela:

8 ESTATIKAREN EKUAZIO UNIBERTSALAK 26
~Mka =k=n∑
k=1
~rk ∧ ~Fkak = ~0 (2)
Honela, (1) eta (2) ekuazioek estatikaren ekuazio unibertsalak osatzen dute. Ekuaziohauek sistema zurrunak orekan mantentzeko bete behar duten balditzak finkatzen dute:
Kanpo indarren erresultanteak zero izan behar du.
Kanpo indarren momentu erresultanteak zero izan behar du.
Baldintza hauek beharrezkoak dira, baina baliteke sistema deformagarrientzat nahikoakez izatea. Honela, bi muturretan aurkako indarrak aplikatuta dituen goma zati batek enuntziatu-tako baldintzak bete egiten ditu, baina goma zatia higiduran dago.
Bi baldintza unibertsalak, X , Y eta Z ardatzekin osatutako erreferentzia sisteman proiek-tatuz, hurrengo baldintza analitikoak erdiesten ditugu:
Fkakx=
k=n∑
k=1
Fkakx= 0 ; Fkaky
=k=n∑
k=1
Fkaky= 0 ; Fkakz
=k=n∑
k=1
Fkakz= 0
Mkakx=
k=n∑
k=1
Mkakx= 0 ; Mkaky
=k=n∑
k=1
Mkaky= 0 ; Fkakz
=k=n∑
k=1
Mkakz= 0
Kasu gehienetan, sistemaren oreka finkatzen duten 6 ekuazio analitiko hauek, kopurutxikiago batera murriztu daitezke erreferentzia sistema egokia aukeratuz gero.
Erreakzio edo lotura indarrak, kanpo indarren barnean sailkatzen dira. Orokorrean indarhauek ezezagunak izaten direnez, kasu hauek eman daitezke:
1. Oreka ekuazioen kopurua eta erreakzio edo lotura indarren kopurua berdina izatea.Kasu honetan, ariketa estatikoki determinatua dagoela, edo isostatikoa dela esaten da.
2. Oreka ekuazioen kopurua, erreakzio ezezagunen kopurua baino txikiagoa izatea. Kasuhonetan ariketa estatikoki indeterminatua, edo hiperestatikoa dela esaten da.
9 SOLIDO ZURRUNAREN ESTATIKA 27
9. SOLIDO ZURRUNAREN ESTATIKA
Zinematikan, higiduran dagoen gorputz batean, honen barne puntuen arteko distantziaerlatiboa konstante mantentzen bada, gorputz honi solido zurruna deitzen zaio.
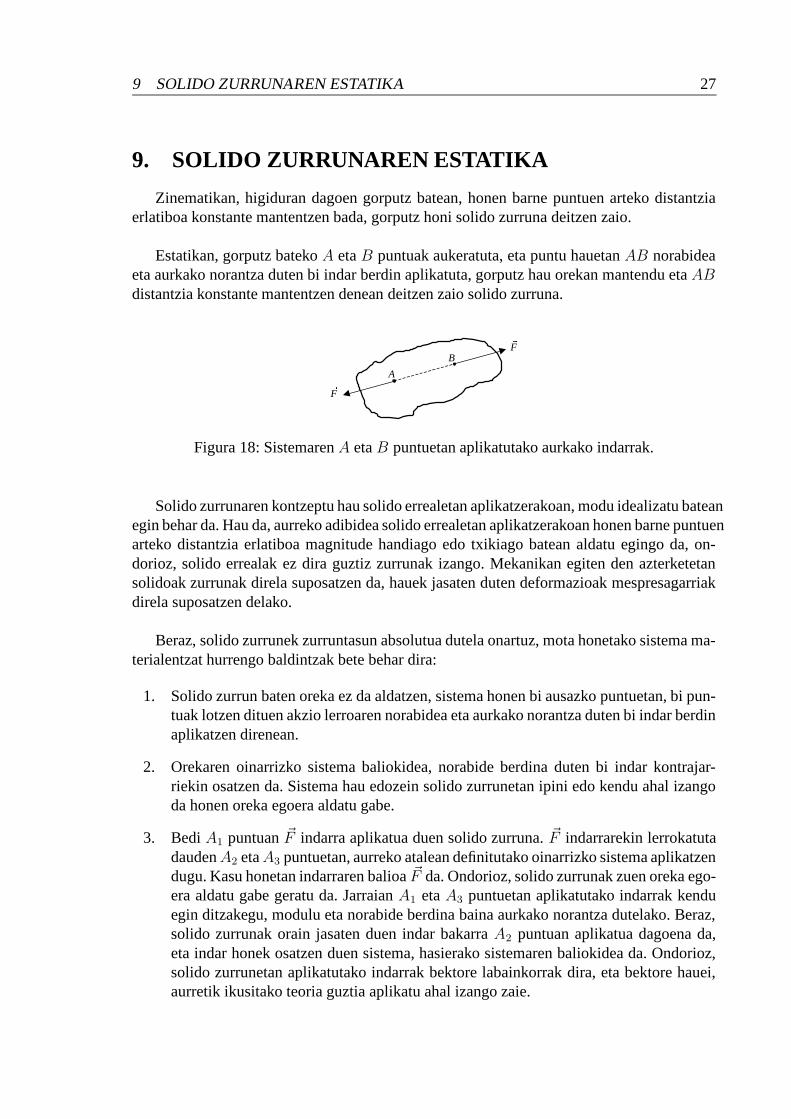
Estatikan, gorputz bateko A eta B puntuak aukeratuta, eta puntu hauetan AB norabideaeta aurkako norantza duten bi indar berdin aplikatuta, gorputz hau orekan mantendu eta ABdistantzia konstante mantentzen denean deitzen zaio solido zurruna.
F�
F�
A
B
Figura 18: Sistemaren A eta B puntuetan aplikatutako aurkako indarrak.
Solido zurrunaren kontzeptu hau solido errealetan aplikatzerakoan, modu idealizatu bateanegin behar da. Hau da, aurreko adibidea solido errealetan aplikatzerakoan honen barne puntuenarteko distantzia erlatiboa magnitude handiago edo txikiago batean aldatu egingo da, on-dorioz, solido errealak ez dira guztiz zurrunak izango. Mekanikan egiten den azterketetansolidoak zurrunak direla suposatzen da, hauek jasaten duten deformazioak mespresagarriakdirela suposatzen delako.
Beraz, solido zurrunek zurruntasun absolutua dutela onartuz, mota honetako sistema ma-terialentzat hurrengo baldintzak bete behar dira:
1. Solido zurrun baten oreka ez da aldatzen, sistema honen bi ausazko puntuetan, bi pun-tuak lotzen dituen akzio lerroaren norabidea eta aurkako norantza duten bi indar berdinaplikatzen direnean.
2. Orekaren oinarrizko sistema baliokidea, norabide berdina duten bi indar kontrajar-riekin osatzen da. Sistema hau edozein solido zurrunetan ipini edo kendu ahal izangoda honen oreka egoera aldatu gabe.
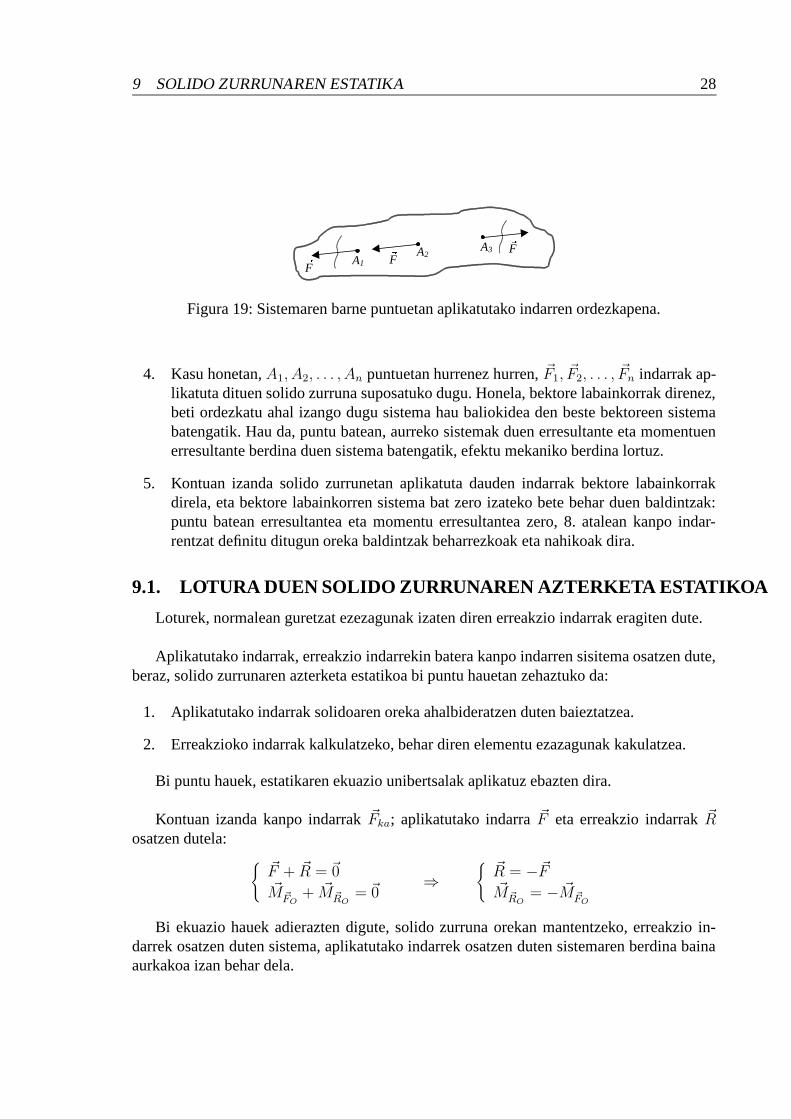
3. Bedi A1 puntuan ~F indarra aplikatua duen solido zurruna. ~F indarrarekin lerrokatutadauden A2 eta A3 puntuetan, aurreko atalean definitutako oinarrizko sistema aplikatzendugu. Kasu honetan indarraren balioa ~F da. Ondorioz, solido zurrunak zuen oreka ego-era aldatu gabe geratu da. Jarraian A1 eta A3 puntuetan aplikatutako indarrak kenduegin ditzakegu, modulu eta norabide berdina baina aurkako norantza dutelako. Beraz,solido zurrunak orain jasaten duen indar bakarra A2 puntuan aplikatua dagoena da,eta indar honek osatzen duen sistema, hasierako sistemaren baliokidea da. Ondorioz,solido zurrunetan aplikatutako indarrak bektore labainkorrak dira, eta bektore hauei,aurretik ikusitako teoria guztia aplikatu ahal izango zaie.
9 SOLIDO ZURRUNAREN ESTATIKA 28
F� F
� F�
A2A1
A3
Figura 19: Sistemaren barne puntuetan aplikatutako indarren ordezkapena.
4. Kasu honetan, A1, A2, . . . , An puntuetan hurrenez hurren, ~F1, ~F2, . . . , ~Fn indarrak ap-likatuta dituen solido zurruna suposatuko dugu. Honela, bektore labainkorrak direnez,beti ordezkatu ahal izango dugu sistema hau baliokidea den beste bektoreen sistemabatengatik. Hau da, puntu batean, aurreko sistemak duen erresultante eta momentuenerresultante berdina duen sistema batengatik, efektu mekaniko berdina lortuz.
5. Kontuan izanda solido zurrunetan aplikatuta dauden indarrak bektore labainkorrakdirela, eta bektore labainkorren sistema bat zero izateko bete behar duen baldintzak:puntu batean erresultantea eta momentu erresultantea zero, 8. atalean kanpo indar-rentzat definitu ditugun oreka baldintzak beharrezkoak eta nahikoak dira.
9.1. LOTURA DUEN SOLIDO ZURRUNAREN AZTERKETA ESTATIKOA
Loturek, normalean guretzat ezezagunak izaten diren erreakzio indarrak eragiten dute.
Aplikatutako indarrak, erreakzio indarrekin batera kanpo indarren sisitema osatzen dute,beraz, solido zurrunaren azterketa estatikoa bi puntu hauetan zehaztuko da:
1. Aplikatutako indarrak solidoaren oreka ahalbideratzen duten baieztatzea.
2. Erreakzioko indarrak kalkulatzeko, behar diren elementu ezazagunak kakulatzea.
Bi puntu hauek, estatikaren ekuazio unibertsalak aplikatuz ebazten dira.
Kontuan izanda kanpo indarrak ~Fka; aplikatutako indarra ~F eta erreakzio indarrak ~Rosatzen dutela:
{~F + ~R = ~0~M~FO
+ ~M~RO= ~0
⇒{
~R = −~F~M~RO
= − ~M~FO
Bi ekuazio hauek adierazten digute, solido zurruna orekan mantentzeko, erreakzio in-darrek osatzen duten sistema, aplikatutako indarrek osatzen duten sistemaren berdina bainaaurkakoa izan behar dela.

9 SOLIDO ZURRUNAREN ESTATIKA 29
9.1.1. PUNTU FINKO BAT DUEN SOLIDO ZURRUNA
Bedi puntu finko bat duen solido zurruna. Puntu finko hau, erreferentzia sistemaren ja-torria dela suposatuko dugu. Lotura honek,~i, ~j eta ~k norabideetako desplazamenduak galer-aziko dizkio solido zurrunari, baina posible izango du hiru erreferentzia ardatzekiko birake-tak. Honela, errotula esferiko motako lotura bat da, eta ondorioz sistema honek hiru askata-sun maila izango ditu.
Lotura honek, aplikatutako indarren eraginagatik 0 puntutik pasatu baina edozein nora-bide duen ~R erreakzio indar bat sortarazten du, indar hau hiru norabide nagusietan deskon-posatu daitekeelarik.
R�
k�
j�
i�
nF�
2F� 1F
�Z
Y
X
0
kRjRiRR zyx
����
++=
Figura 20: Puntu finkoa duen solido zurruna.
Aplikatutako indarrak ~F1, ~F2, . . . , ~Fn izanda, hauen erresultantea:
k=n∑
k=1
~Fk = Fx~i + Fy
~j + Fz~k
Jarraian, 0 puntuan momentuak hartuz, aplikatutako indarren momentu erresultantea:
~M~F0=
k=n∑
k=1
~rk ∧ ~Fk = Mx~i + My
~j + Mz~k
Estatikaren ekuazio unibertsalak aplikatuz:{
~F + ~R = ~0~M~F0
+ ~M~R0= ~0
Lehengo ekuaziotik:
Rx + Fx = 0 ; Ry + Fy = 0 ; Rz + Fz = 0
Eta bigarren ekuaziotik, kontuan izanda erreakzio indarra 0 puntutik pasatzen dela, etaondorioz, ~M~R0
= ~0 dela:
9 SOLIDO ZURRUNAREN ESTATIKA 30
Mx = 0 ; My = 0 ; Mz = 0
Lehenengo hiru ekuazioetaz baliatuz, ~R erreakzio indarra kalkulatu dezakegu, eta bestehiru ekuazioek solido hau orekan mantendu dadin bete behar den baldintza finkatzen dute,hau da, aplikatutako indarrek 0 puntuarekiko sortzen duten momentua zero izan behar dela.
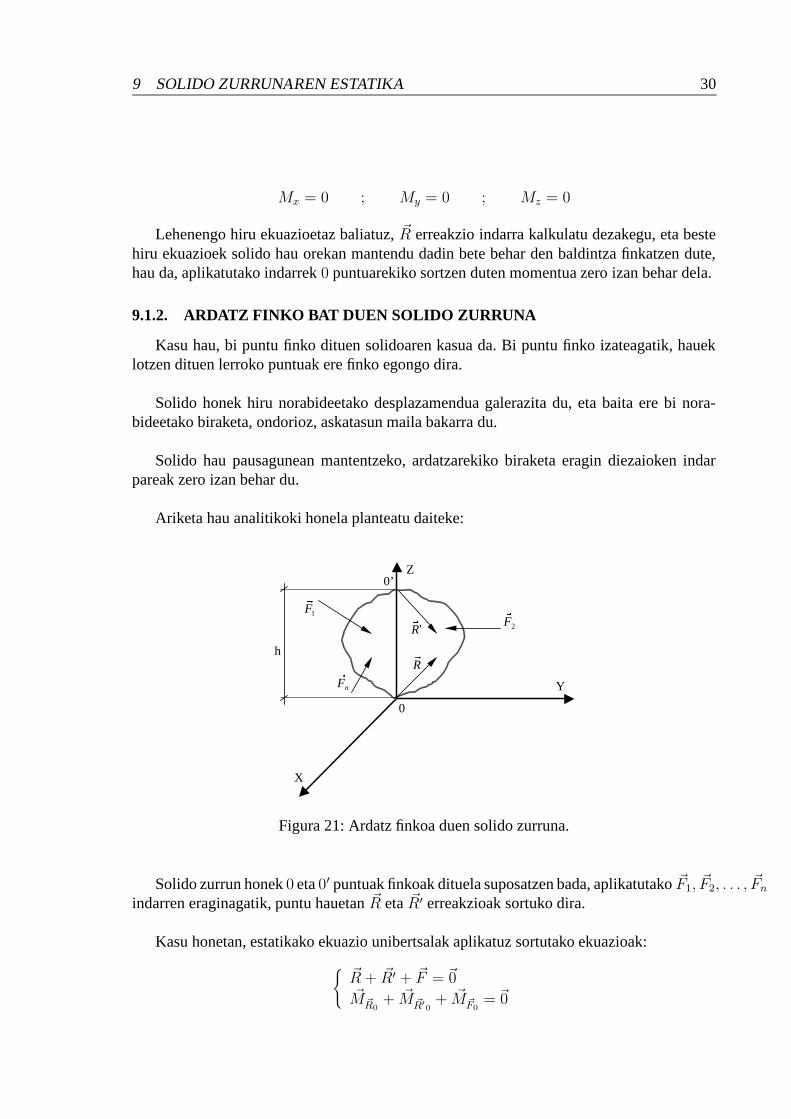
9.1.2. ARDATZ FINKO BAT DUEN SOLIDO ZURRUNA
Kasu hau, bi puntu finko dituen solidoaren kasua da. Bi puntu finko izateagatik, haueklotzen dituen lerroko puntuak ere finko egongo dira.
Solido honek hiru norabideetako desplazamendua galerazita du, eta baita ere bi nora-bideetako biraketa, ondorioz, askatasun maila bakarra du.
Solido hau pausagunean mantentzeko, ardatzarekiko biraketa eragin diezaioken indarpareak zero izan behar du.
Ariketa hau analitikoki honela planteatu daiteke:
nF�
R�
2F�
'R�
1F�
h
0’Z
Y
X
0
Figura 21: Ardatz finkoa duen solido zurruna.
Solido zurrun honek 0 eta 0′ puntuak finkoak dituela suposatzen bada, aplikatutako ~F1, ~F2, . . . , ~Fn
indarren eraginagatik, puntu hauetan ~R eta ~R′ erreakzioak sortuko dira.
Kasu honetan, estatikako ekuazio unibertsalak aplikatuz sortutako ekuazioak:
{~R + ~R′ + ~F = ~0~M~R0
+ ~M ~R′0+ ~M~F0
= ~0

9 SOLIDO ZURRUNAREN ESTATIKA 31
Bestalde, ~R bektorearen akzio lerroa 0 puntutik pasatzen denez, ~M~R0= ~0 da. Eta ~M ~R′
0
momentuaren balioa kalkulatzeko:
~M ~R′0
=−→00′ ∧ ~R′ =
∣∣∣∣∣∣∣
~i ~j ~k0 0 h~R′
x~R′
y~R′
z
∣∣∣∣∣∣∣
Odorioz, estatikako ekuazioak honela geratuko dira:
Rx + R′
x + Fx = 0 ; Ry + R′
y + Fy = 0 ; Rz + R′
z + Fz = 0
−h R′
y + Mx = 0 ; h R′
x + My = 0 ; Mz = 0
Azkenengo adierazpenak orekaren baldintza zehazten du, hau da, ardatz finko bat duensolido zurruna orekan egongo da, aplikatutako indarrek ardatz honekiko egiten duten mo-mentua zero denean.
Beste bost ekuazioak loturetan sortzen diren erreakzioak kalkulatzeko erabili ditzakegu,baina kasu honetan 6 parametro ezezagun ditugunez, kasu hiperestatiko bat dugu.
Praktikan, ariketa hau ebatzi ahal izango da, hurrengo baldintzarenbat betetzen denean:
1. Aplikatutako indarren erresultantea Z ardatzarekiko elkarzut denean. Honela, Fz = 0izango da, eta ondorioz R′
z = Rz = 0.
2. Solido zurrun honek ardatzean duen loturen arabera, loturako puntu batek ezin ditue-nean indar axialak jasan. Kasu honetan Rz = 0 eta R′
z 6= 0 izango da, edo Rz 6= 0 etaR′
z = 0. Edozein kasutan, ariketa hau hiperestatiko izatetik isostatikoa izatera pasatzenda.
9.1.3. PLANO BATEAN BERMATUA DAGOEN SOLIDO ZURRUNA
Atal honetan, solido zurrun bat plano batean hiru modutan bermatu daitekela suposatukodugu:
1. Plano bateko puntu batean bermatzen den solido zurruna:
Modu honen barnean hurrengo azpisailkapena egin daiteke:
a) Solido zurruna eta planoaren artean lotura leuna dagoenean:Kasu honetan, ~R erreakzio indarra planoarekiko ortogonala da, eta ondorioz ore-ka mantentzeko, aplikatutako indarren erresultanteak ~F ere planoarekiko ortog-onala izan behar du.
b) Solido zurruna eta planoaren artean lotura zimurra dagoenean:Kasu honetan aldiz, ~R erreakzio indarrak osagai tangentziala izan dezake, bainaoreka mantentzeko, ikusi dugun bezala, marruskadura konoaren barnean egonbehar du. Lotura alde batekoa izaten bada, aplikatutako indarren erresultantea ~Fkono honen barnean egoteaz gain planoaren aldeko norantza izan behar du.
9 SOLIDO ZURRUNAREN ESTATIKA 32
Edozein dela gure kasua, solido zurrunak planoarekin duen kontaktu puntua errefer-entzia sistemaren jatorria dela suposatuko dugu. Honela, estatikaren ekuazio unibert-salak aplikatuz:
{~R + ~F = ~0~M~R0
+ ~M~F0= ~0
Kontuan izanda 0 puntuan hartu ditugula momentuak, eta erreakzio indarraren akziolerroa puntu honetatik pasatzen dela, estatikaren ekuazioak honela geratzen zaizkigu:
{~R + ~F = ~0~M~F0
= ~0
Lehenengo ekuazioa erreakzio indarra kalkulatzeko erabili dezakegu ~R = −~F , etabigarren ekuazioak, oreka baldintza zehazten digu. Hau da, aplikatutako indarrek kon-taktuko 0 puntuarekiko egiten duten momentua zero izan behar dela.
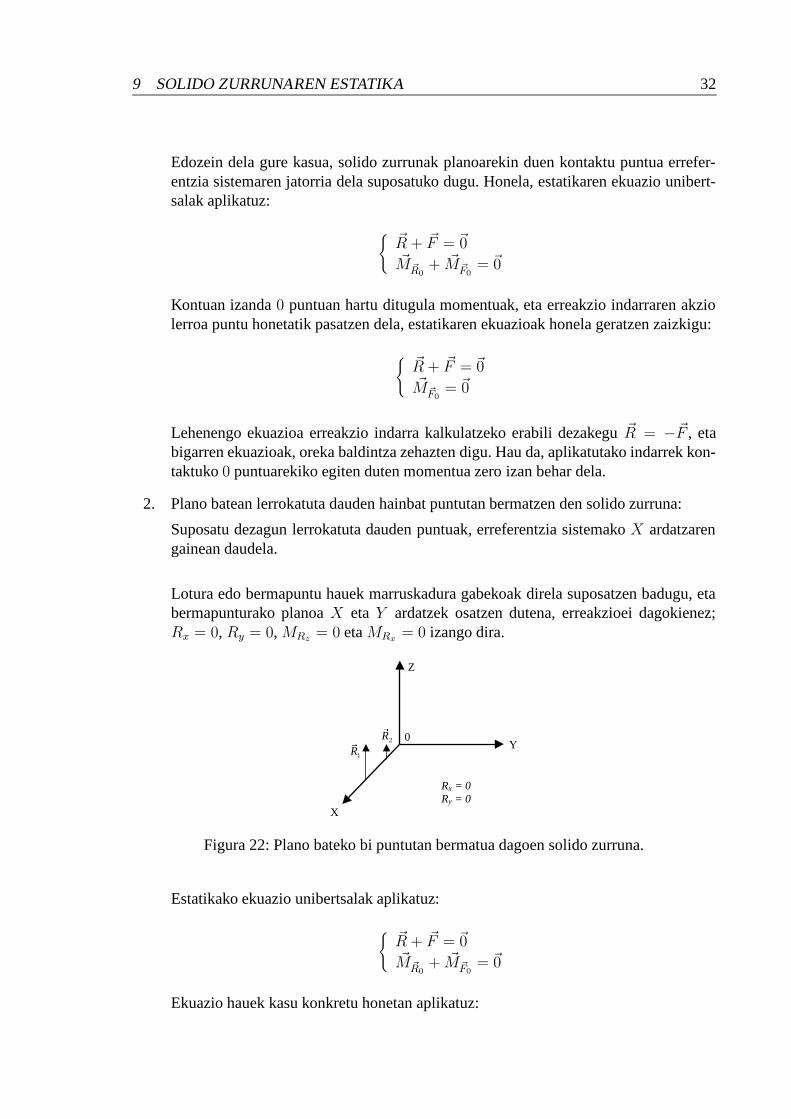
2. Plano batean lerrokatuta dauden hainbat puntutan bermatzen den solido zurruna:
Suposatu dezagun lerrokatuta dauden puntuak, erreferentzia sistemako X ardatzarengainean daudela.
Lotura edo bermapuntu hauek marruskadura gabekoak direla suposatzen badugu, etabermapunturako planoa X eta Y ardatzek osatzen dutena, erreakzioei dagokienez;Rx = 0, Ry = 0, MRz
= 0 eta MRx= 0 izango dira.
1R�
2R�
0
Z
Y
X
Rx = 0Ry = 0
Figura 22: Plano bateko bi puntutan bermatua dagoen solido zurruna.
Estatikako ekuazio unibertsalak aplikatuz:
{~R + ~F = ~0~M~R0
+ ~M~F0= ~0
Ekuazio hauek kasu konkretu honetan aplikatuz:
9 SOLIDO ZURRUNAREN ESTATIKA 33
Fx = 0 ; Fy = 0 ; Rz + Fz = 0
Mx = 0 ; MRy+ My = 0 ; Mz = 0
Ekuazio hauek; Fx = 0, Fy = 0, Mx = 0 eta Mz = 0 aplikatutako kanpo indarrekbete behar duten baldintzak zehazten digute, hau da, aplikatutako indarren erresultan-teak planoarekiko ortogonala izan behar du, eta ez du sortu behar momenturik X etaZ ardatzekiko.
Beste bi ekuaziokin, erreakzio ezezagunak kalkulatu ahal izango ditugu, solido zur-runak planoarekin duen bermapuntuen kopurua bi edo bi baino txikiagoa den ka-su guztietan. Bermapuntuen kopurua bi baino handiagoa izaten bada, ariketa hiper-estatikoa izango da.
3. Plano batean lerrokatuta ez dauden hainbat puntutan bermatzen den solido zurruna:
Bedi, X eta Y ardatzek definitzen duten planoa. Kasu honetan ere, solido zurrunakplanoarekin izan behar dituen bermapuntu edo loturak, marruskadura gabekoak direlasuposatuko dugu, ondorioz; Rx = 0, Ry = 0 eta MRz
= 0 izango dira.
Orekaren ekuazioak planteatuz:
{~R + ~F = ~0~M~RO
+ ~M~FO= ~0
Eta gure kasura zehaztuz:
Fx = 0 ; Fy = 0 ; Rz + Fz = 0
MRx+ Mx = 0 ; MRy
+ My = 0 ; Mz = 0
Orain oreka baldintzak lehenengo bi ekuazioekin eta azkenarekin finkatzen dira, hauda, aplikatutako indarren erresultantea planoarekiko normala izan behar da eta ap-likatutako indarren planoarekiko ortogonala den ardatzarekiko sortzen duten momentuerresultantea zero izan behar dela.
Beste hiru ekuazioak, bermapuntuetan sortzen diren erreakzioak kalkulatzeko baliodute. Bermapuntu hauen kopurua hiru baino handiagoa izaten bada, ariketa hau hiper-estatikoa izango da.

9 SOLIDO ZURRUNAREN ESTATIKA 34
9.1.4. BI PLANOTAN BERMATUA DAGOEN SOLIDO ZURRUNA
Kasu honetan, solido zurruna eta bi planoen artean dagoen kontaktua marruskadura gabekoada. Kanpo indarrak paraleloak izan behar dute, erresultante bakarra eman behar dutelarik, etaazkenik, bi erreakzioen akzio lerroak eta aplikatutako indarren erresultantearen akzio lerroapuntu bakarrean moztu behar dira.
Kasu honetan, solido zurrunak planoekin duen kontaktuko puntuetan, planoekiko ortog-onalak diren ~R1 eta ~R2 erreakzioak sortzen dira.
Aplikatutako indarren erresultantea ~F izaten bada, oreka ekuazioak aplikatuz hurrengobaldintza bete behar da:
~R1 + ~R2 + ~F = ~0 edo; ~R1 + ~R2 = −~F
Honek esan nahi du, aplikatutako indarren erresultantea, sortutako erreakzio indarrekikoberdina baina kontrajarria izan behar dela, hau da, ~R1, ~R2 eta ~F indarrak planokideak izanbehar dutela.
Erreakzioen balioa, hurrengo metodo grafikoa erabiliz kalkulatu daiteke:
1R�
1R�
F�
F�
2R�
2R�
Figura 23: Bi planotan bermatua dagoen solido zurruna.
9.1.5. PLANO BATEAN BERMATU ETA PUNTU FINKO BAT DUEN SOLIDO ZUR-RUNA
Solido zurrunak planoarekin duen kontaktua marruskadura gabekoa da.
Aplikatutako indarren erresultanteari ~F deitzen diogu. 0 puntu finkoan, printzipioz nor-abide ezezaguna duen ~R0 erreakzioa sortzen da, eta solido zurrunak planoarekin duen kon-taktuko puntuan, planoarekiko ortogonala den ~R1 erreakzioa sortzen da.
Oreka baldintzak aplikatuz, zera bete behar dela ondorioztatzen da:

9 SOLIDO ZURRUNAREN ESTATIKA 35
~R1 + ~R0 + ~F = ~0 edo; ~R1 + ~R0 = −~F
Ikus dezakegun bezala, aurreko atalean lortutako erantzun berdina erdietsi dugu, bainadesberdintasun batekin, kasu honetan ez dugu ~R0 erreakzioaren norabidea ezagutzen. Er-reakzio indar honen norabidea ezagutzeko nahikoa izango da ~R1 eta ~F indarren akzio lerroakmozten diren puntua, 0 puntuarekin elkartzea.
0R�
0R�
F�
F�
1R�
1R�
0
Figura 24: Puntu finkoa izan eta plano batean bermatua dagoen solido zurruna.
10 GRAFOSTATIKA 36
10. GRAFOSTATIKA
Solido zurrunetan aplikatutako indarren balioak kalkulatzeko (bektore labainkorrak), sis-tema hauek planoak direnean, metodo grafikoak erabili daitezke. Metodo hauek analitikoakbaino azkarragoak dira, nahiz eta laneko tresnen eraginagatik, zehaztasun falta ere izan deza-keten. Hala ere, metodo grafikoetatik lortutako zehaztasuna nahikoa izan daiteke ariketapraktikoak ebazterako orduan.
Metodo honen oinarria, bektore elkartopakorren batuketa egiteko, paralelogramoarenlegea jarraitzea da.
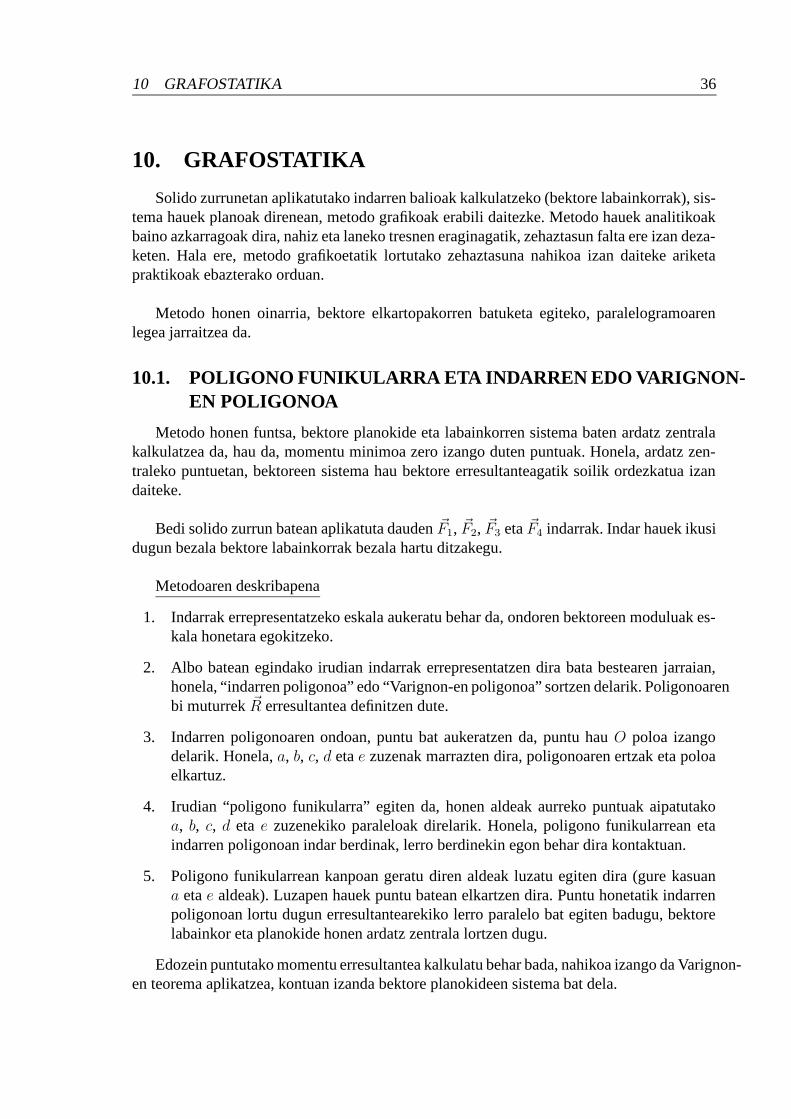
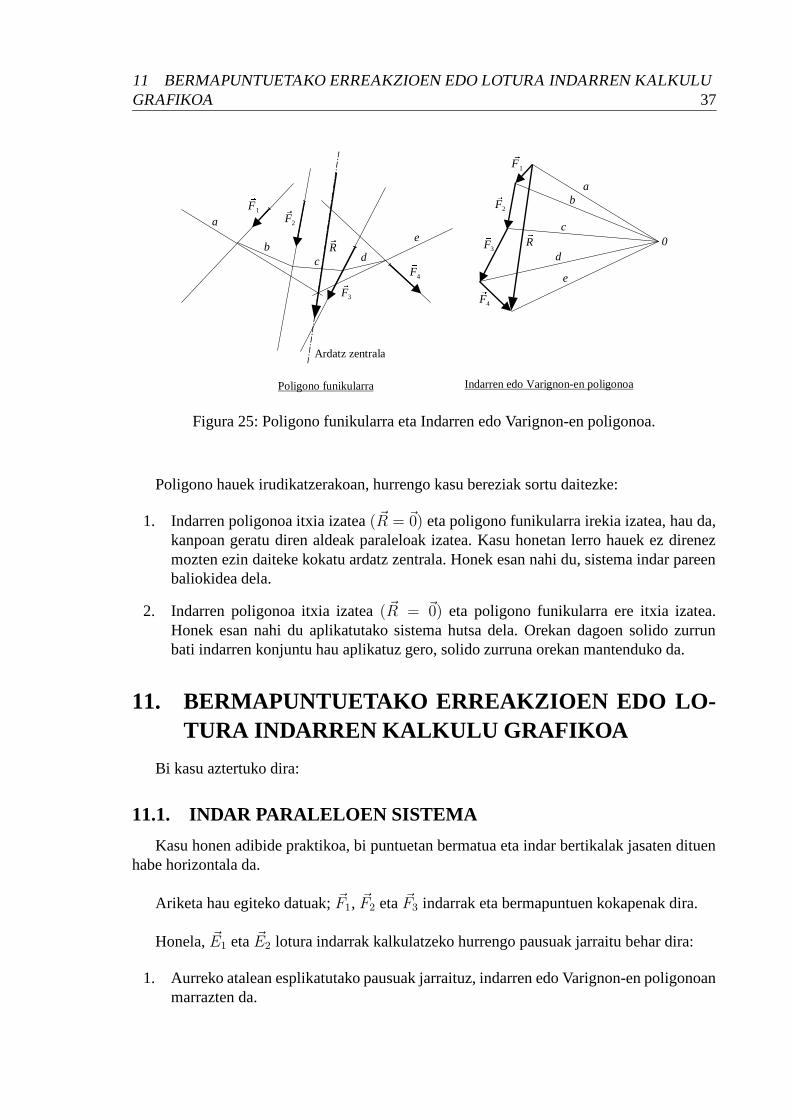
10.1. POLIGONO FUNIKULARRA ETA INDARREN EDO VARIGNON-EN POLIGONOA
Metodo honen funtsa, bektore planokide eta labainkorren sistema baten ardatz zentralakalkulatzea da, hau da, momentu minimoa zero izango duten puntuak. Honela, ardatz zen-traleko puntuetan, bektoreen sistema hau bektore erresultanteagatik soilik ordezkatua izandaiteke.
Bedi solido zurrun batean aplikatuta dauden ~F1, ~F2, ~F3 eta ~F4 indarrak. Indar hauek ikusidugun bezala bektore labainkorrak bezala hartu ditzakegu.
Metodoaren deskribapena
1. Indarrak errepresentatzeko eskala aukeratu behar da, ondoren bektoreen moduluak es-kala honetara egokitzeko.
2. Albo batean egindako irudian indarrak errepresentatzen dira bata bestearen jarraian,honela, “indarren poligonoa” edo “Varignon-en poligonoa” sortzen delarik. Poligonoarenbi muturrek ~R erresultantea definitzen dute.
3. Indarren poligonoaren ondoan, puntu bat aukeratzen da, puntu hau O poloa izangodelarik. Honela, a, b, c, d eta e zuzenak marrazten dira, poligonoaren ertzak eta poloaelkartuz.
4. Irudian “poligono funikularra” egiten da, honen aldeak aurreko puntuak aipatutakoa, b, c, d eta e zuzenekiko paraleloak direlarik. Honela, poligono funikularrean etaindarren poligonoan indar berdinak, lerro berdinekin egon behar dira kontaktuan.
5. Poligono funikularrean kanpoan geratu diren aldeak luzatu egiten dira (gure kasuana eta e aldeak). Luzapen hauek puntu batean elkartzen dira. Puntu honetatik indarrenpoligonoan lortu dugun erresultantearekiko lerro paralelo bat egiten badugu, bektorelabainkor eta planokide honen ardatz zentrala lortzen dugu.
Edozein puntutako momentu erresultantea kalkulatu behar bada, nahikoa izango da Varignon-en teorema aplikatzea, kontuan izanda bektore planokideen sistema bat dela.
11 BERMAPUNTUETAKO ERREAKZIOEN EDO LOTURA INDARREN KALKULUGRAFIKOA 37
Ardatz zentrala
R�
4F�
3F�
2F�1F
�
4F�
3F�
2F�
1F�
R�e
dcb
a
0
e
d
c
ab
Poligono funikularra Indarren edo Varignon-en poligonoa
Figura 25: Poligono funikularra eta Indarren edo Varignon-en poligonoa.
Poligono hauek irudikatzerakoan, hurrengo kasu bereziak sortu daitezke:
1. Indarren poligonoa itxia izatea ( ~R = ~0) eta poligono funikularra irekia izatea, hau da,kanpoan geratu diren aldeak paraleloak izatea. Kasu honetan lerro hauek ez direnezmozten ezin daiteke kokatu ardatz zentrala. Honek esan nahi du, sistema indar pareenbaliokidea dela.
2. Indarren poligonoa itxia izatea ( ~R = ~0) eta poligono funikularra ere itxia izatea.Honek esan nahi du aplikatutako sistema hutsa dela. Orekan dagoen solido zurrunbati indarren konjuntu hau aplikatuz gero, solido zurruna orekan mantenduko da.
11. BERMAPUNTUETAKO ERREAKZIOEN EDO LO-TURA INDARREN KALKULU GRAFIKOA
Bi kasu aztertuko dira:
11.1. INDAR PARALELOEN SISTEMA
Kasu honen adibide praktikoa, bi puntuetan bermatua eta indar bertikalak jasaten dituenhabe horizontala da.
Ariketa hau egiteko datuak; ~F1, ~F2 eta ~F3 indarrak eta bermapuntuen kokapenak dira.
Honela, ~E1 eta ~E2 lotura indarrak kalkulatzeko hurrengo pausuak jarraitu behar dira:
1. Aurreko atalean esplikatutako pausuak jarraituz, indarren edo Varignon-en poligonoanmarrazten da.
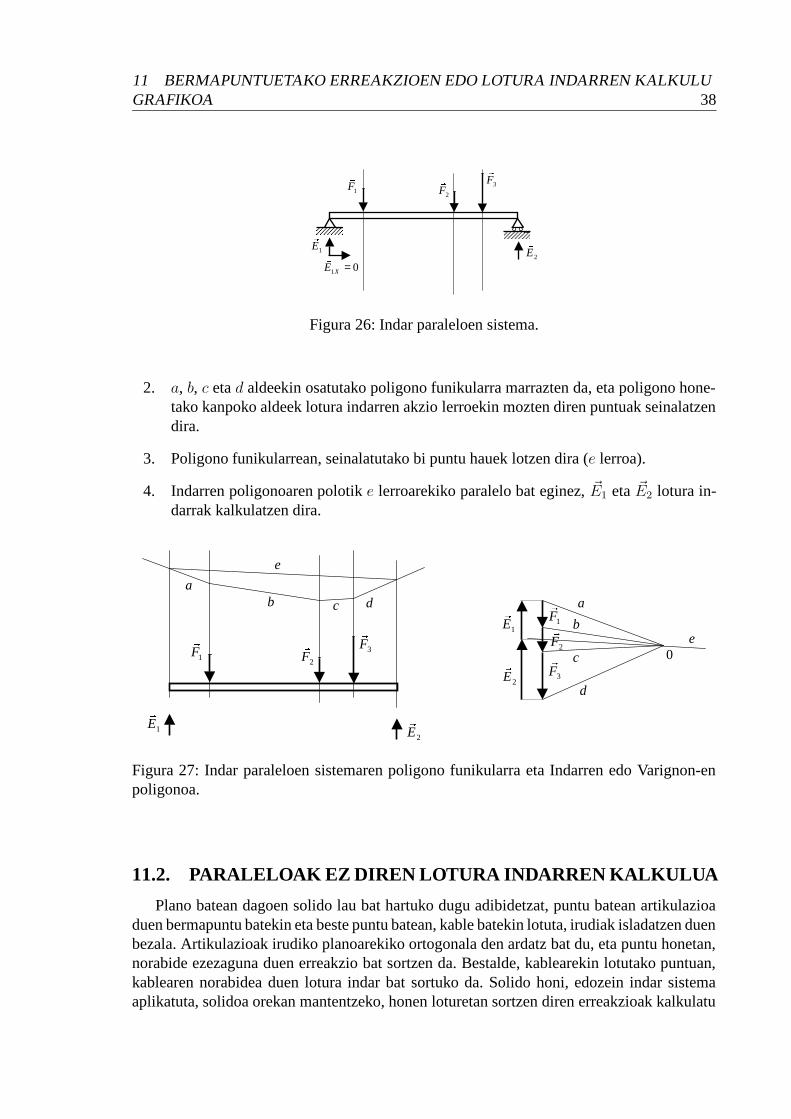
11 BERMAPUNTUETAKO ERREAKZIOEN EDO LOTURA INDARREN KALKULUGRAFIKOA 38
1F�
3F�
2F�
2E�
1E�
01 =XE�
Figura 26: Indar paraleloen sistema.
2. a, b, c eta d aldeekin osatutako poligono funikularra marrazten da, eta poligono hone-tako kanpoko aldeek lotura indarren akzio lerroekin mozten diren puntuak seinalatzendira.
3. Poligono funikularrean, seinalatutako bi puntu hauek lotzen dira (e lerroa).
4. Indarren poligonoaren polotik e lerroarekiko paralelo bat eginez, ~E1 eta ~E2 lotura in-darrak kalkulatzen dira.
e
c da
1F�
3F�
2F�
2E�
1E�
b
e
2E�
1E�
0
a
b
c
d
1F�
3F�
2F�
Figura 27: Indar paraleloen sistemaren poligono funikularra eta Indarren edo Varignon-enpoligonoa.
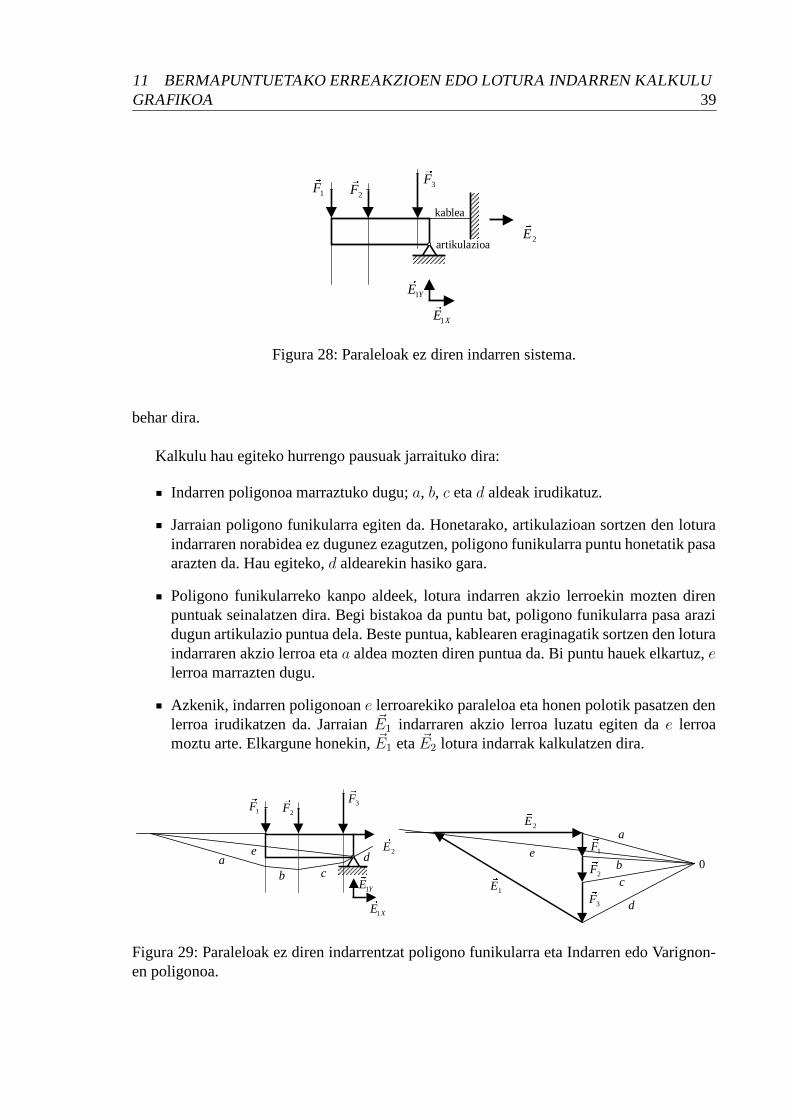
11.2. PARALELOAK EZ DIREN LOTURA INDARREN KALKULUA
Plano batean dagoen solido lau bat hartuko dugu adibidetzat, puntu batean artikulazioaduen bermapuntu batekin eta beste puntu batean, kable batekin lotuta, irudiak isladatzen duenbezala. Artikulazioak irudiko planoarekiko ortogonala den ardatz bat du, eta puntu honetan,norabide ezezaguna duen erreakzio bat sortzen da. Bestalde, kablearekin lotutako puntuan,kablearen norabidea duen lotura indar bat sortuko da. Solido honi, edozein indar sistemaaplikatuta, solidoa orekan mantentzeko, honen loturetan sortzen diren erreakzioak kalkulatu
11 BERMAPUNTUETAKO ERREAKZIOEN EDO LOTURA INDARREN KALKULUGRAFIKOA 39
2E�
YE1
�
XE1
�
kablea
artikulazioa
1F�
2F�
3F�
Figura 28: Paraleloak ez diren indarren sistema.
behar dira.
Kalkulu hau egiteko hurrengo pausuak jarraituko dira:
Indarren poligonoa marraztuko dugu; a, b, c eta d aldeak irudikatuz.
Jarraian poligono funikularra egiten da. Honetarako, artikulazioan sortzen den loturaindarraren norabidea ez dugunez ezagutzen, poligono funikularra puntu honetatik pasaarazten da. Hau egiteko, d aldearekin hasiko gara.
Poligono funikularreko kanpo aldeek, lotura indarren akzio lerroekin mozten direnpuntuak seinalatzen dira. Begi bistakoa da puntu bat, poligono funikularra pasa arazidugun artikulazio puntua dela. Beste puntua, kablearen eraginagatik sortzen den loturaindarraren akzio lerroa eta a aldea mozten diren puntua da. Bi puntu hauek elkartuz, elerroa marrazten dugu.
Azkenik, indarren poligonoan e lerroarekiko paraleloa eta honen polotik pasatzen denlerroa irudikatzen da. Jarraian ~E1 indarraren akzio lerroa luzatu egiten da e lerroamoztu arte. Elkargune honekin, ~E1 eta ~E2 lotura indarrak kalkulatzen dira.
e d
ba
c
2E�
YE1
�
XE1
�
1F�
2F�
3F�
e0
c
d
b
a
1E�
2E�
1F�
2F�
3F�
Figura 29: Paraleloak ez diren indarrentzat poligono funikularra eta Indarren edo Varignon-en poligonoa.
11 BERMAPUNTUETAKO ERREAKZIOEN EDO LOTURA INDARREN KALKULUGRAFIKOA 40
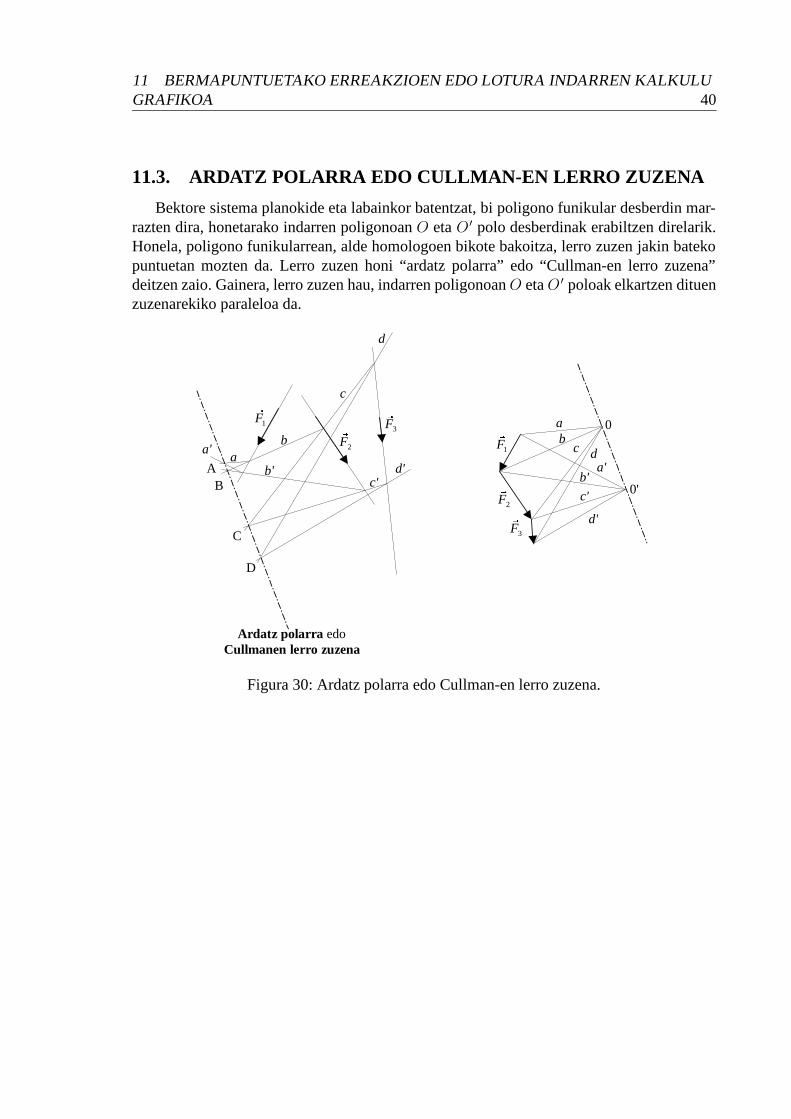
11.3. ARDATZ POLARRA EDO CULLMAN-EN LERRO ZUZENA
Bektore sistema planokide eta labainkor batentzat, bi poligono funikular desberdin mar-razten dira, honetarako indarren poligonoan O eta O′ polo desberdinak erabiltzen direlarik.Honela, poligono funikularrean, alde homologoen bikote bakoitza, lerro zuzen jakin batekopuntuetan mozten da. Lerro zuzen honi “ardatz polarra” edo “Cullman-en lerro zuzena”deitzen zaio. Gainera, lerro zuzen hau, indarren poligonoan O eta O ′ poloak elkartzen dituenzuzenarekiko paraleloa da.
Ardatz polarra edoCullmanen lerro zuzena
d
0'c'
d'
b'a'
0
cba
3F�
2F�
1F�
B
C
A
D
c'd'b'
a'
d
c
ba
3F�
2F�
1F�
Figura 30: Ardatz polarra edo Cullman-en lerro zuzena.
13 SOLIDO FUNIKULARREN OREKAREN EKUAZIO BEKTORIALA. KASUBEREZIA 41
12. SOLIDO FUNIKULARREN ESTATIKA. DEFINIZIOA
Solido funikularrak definitzeko, kontuan izan behar dugu hurrengo ezaugarriak dituztela;deformagarriak dira, hauen sekzioa mesprezagarria da luzerarekiko eta ez dute zurruntasunikmakurdurarekiko. Solido askearen diagrama egiterakoan, elementu honen muturretan ez diramakurdura momentuak azalduko, honela, izango duten indar bakarra, norabide tangentzialaduten tentsioak izango dira.
Gainera, solido funikularretan egingo ditugun azterketetan, hurrengo bi hipotesi gehigarrihauek aplikatuko ditugu:
1. Luzatu ezinak dira, hau da, luzera berdina izango dute karga aplikatu aurretik eta kargaaplikatu ondoren.
2. Oreka kokapena hartzen dutenean zurrunak bihurtzen direla suposatuko dugu. Hau da,oreka kokapenean kanpo indarrek orain arte enuntziatutako baldintza orokorrak betekodituzte.
Errealitatean aurkitu daitezken solido funikularrak luzera handia duten kableak dira,adibidez; argi indarraren kableak, trenbidetan dauden kableak, kateak, eta abar.
13. SOLIDO FUNIKULARREN OREKAREN EKUAZIOBEKTORIALA. KASU BEREZIA
Bedi kable batean hartutako PP ′ elementu diferentziala, honen luzera dS delarik.
Puntu finko bat O hartuko dugu, honela, P eta P ′ puntuen kokapena zehaztu ahal izangodugu puntu finko honekiko, ~r eta ~r + d~r kokapen bektoreak erabiliz.
Kableak bere luzera unitearekiko jasaten duen indar osoa ~F izaten bada, PP ′ elementudiferentzialak jasaten duena, ~F · dS izango da.
Jarraian isolatutako elementu diferentzial honetan estatikako ekuazioak planteatuko di-tugu, honetarako kontuan izango dugu baita ere, kablea isolatzerakoan aplikatu behar direnlotura indarrak, kasu honetan lotura indar hauek “tentsioak” direlarik.
Solido funikularraren definizioan aipatu da, hauek jasaten duten tentsioa kableak hartzenduen geometriarekiko tangentea dela. Baldintza honen baieztapen bat izateko xedearekin,printzipioz suposatuko dugu tentsio hauek ez dutela kablearekiko tangentzialak izan behar-rik.
Beraz, oreka ekuazioak planteatuz:
1. Indarren batura berdin zero: ~F · dS + ~T + d~T − ~T = ~0

13 SOLIDO FUNIKULARREN OREKAREN EKUAZIO BEKTORIALA. KASUBEREZIA 42
P
P’
Td�
T�
−
T�
TdT��
+
dSF�
rd�
r�
rdr��
+
0
Figura 31: Solido funikular baten elementu diferentzialak jasaten dituen tentsioak.
2. O puntuan hartutako momentuen batura berdin zero:
~r ∧ (~F · dS − ~T ) + (~r + d~r) ∧ (~T + d~T ) = ~0
Momentuak aplikatzerakoan ~F · dS indarra P sekzioan aplikatua dagoela suposatzenda, maila goreneko diferentzialak saihesteko.
Bi ekuazio hauek garatuz:
1. ~F · dS + d~T = ~0
Ekuazio honek solido funikularren orekaren ekuazio bektoriala adierazten du.
2. Momentuen batuketa garatzen badugu:
~r ∧ ~F · dS − ~r ∧ ~T + ~r ∧ ~T + ~r ∧ d~T + d~r ∧ ~T + d~r ∧ d~T = ~0
~r ∧ (~F · dS + d~T ) + d~r ∧ ~T + d~r ∧ d~T = ~0
Kontuan izanda ~F · dS + d~T = ~0 dela, eta d~r∧ d~T maila goreneko infinitesimala dela,momentuen ekuazioa honela geratzen zaigu:
d~r ∧ ~T = ~0
Ekuazio honek adierazten du; ~T tentsioa eta d~r diferentziala lerrokideak direla, hauda, bi bektore hauek osatzen duten angelua zero dela. Honek esan nahi du, tentsioaeta kablearen geometria tangenteak direla puntu guztietan. Ondorio honek, aurretikezagutzen genituen ezaugarriak baieztatu egiten digu.
Kablearen luzera unitatearekiko kargak, ~F indarrak, ~u bektore unitarioarekin definitu-tako norabide konstantea izango balu, aurreko kasuan erabilitako prozesu analogoa jarraitudezakegu.
Honela, indarren batura berdin zero egitean lortutako ekuazioaren bi aldeak ~u bektore-arekin bektorialki biderkatuz:

14 KABLEAREN OREKAREN EKUAZIO CARTESIAR ETA INTRINTSEKOAK 43
~F · dS ∧ ~u + d~T ∧ ~u = ~0. Kasu honetan ~F · dS eta ~u bektoreak lerrokideak direnez,~F · dS ∧ ~u = ~0 izango da. Ondorioz, d~T ∧ ~u = ~0 emaitza lortzen dugu.
Honela, ~u bektorea konstantea izanagatik ~T ∧ d~u = ~0 dela ziurtatu dezakegu, berazlortutako bi emaitza hauek elkartuz:
d~T ∧ ~u + ~T ∧ d~u = ~0 ⇒ d(~T ∧ ~u) = ~0 ⇒ ~T ∧ ~u =−−−→Ktea.
Emaitza honetatik ondorioztatu daiteke ~T tentsioa beti plano batean kokatua dagoela, etaune guztietan ~T tentsioa kablearen geometriarekiko tangentea denez, kablearen oreka kurbaplano batean dago, edo beste era batera esanda, laua da.
14. KABLEAREN OREKAREN EKUAZIO CARTESIARETA INTRINTSEKOAK
Bedi orain, kableak orekan hartzen duen geometrian, puntu bakoitzean kurbarekiko nor-abide tangentea definitzen duen ~τ bektore unitarioa. Puntu bakoitzean tentsioa kablearengeometriarekiko tangentea denez, tentsioaren balioa honela adierazi daiteke:
~T = T · ~τ
Eta oreka ekuazio bektoriala ~F · dS + d~T = ~0 , honela espresatu daiteke;
~F · dS + d(T · ~τ) = ~0, espresio hau garatuz:
~F · dS + dT · ~τ + T · d~τ = ~0 , eta azkenik:
~F + ~τdT
dS+ T
d~τ
dS= ~0
Jarraian, ~F bere osagai intrintsekoen arabera adieraziz:
~F = Fτ · ~τ + Fη · ~η + Fb ·~b eta kontuan izanda d~τdS
= ~ηρ
dela, aurreko espresioa triedro
intrinsekoaren ~τ , ~η eta ~b norabideetan proiektatuz:
dTdS + Fτ = 0
Tρ + Fη = 0
Fb = 0
Ekuazio hauek, kable edo solido funikularrarenoreka ekuazio intrintsekoak dira.
Oreka ekuazio cartesiarrak hurrengo ekuaziotik abiatuta kalkulatzen dira:
~F · dS + d(T · ~τ) = ~0
15 KARGA BERTIKAL JARRAIA JASATEN DUEN KABLEA 44
Kotuan izanda, ~τ bektorearen osagai cartesiarrak hurrengo hauek direla:
~τ = dxdS
~i +dydS
~j + dzdS
~k
Eta ~F indarraren osagai cartesiarrak:
~F = Fx~i + Fy
~j + Fz~k
Honela, oreka ekuazio cartesiarra hiru ardatz caresiarretan proiektatuz:
d
(
Tdx
dS
)
+ Fx dS = 0 ; d
(
Tdy
dS
)
+ Fy dS = 0 ; d
(
Tdz
dS
)
+ Fz dS = 0
Eta kontuan izanda ~u unitarioa izateagatik betetzen duen baldintza:
(
dx
dS
)2
+
(
dy
dS
)2
+
(
dz
dS
)2
= 1
Lau ekuazio hauek integratuz eta dagokien ingurune baldintzak aplikatuz, oreka kurbarenekuazioa emango digute.
15. KARGA BERTIKAL JARRAIA JASATEN DUEN KABLEA
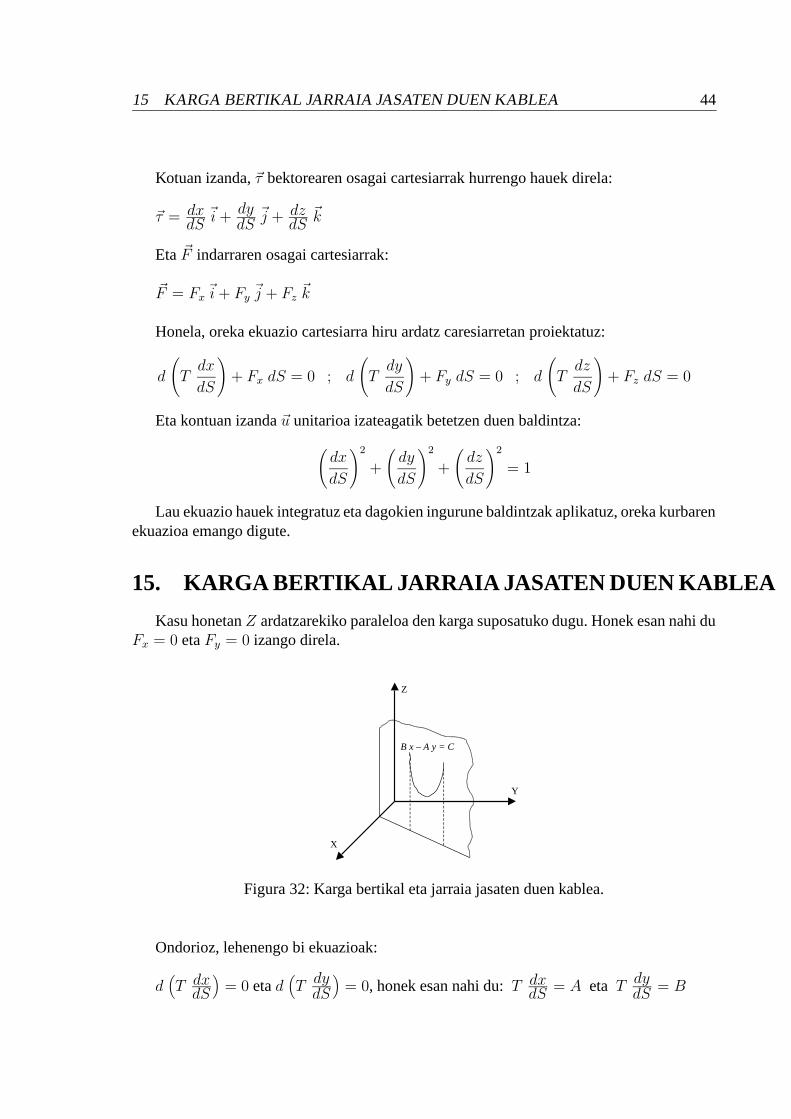
Kasu honetan Z ardatzarekiko paraleloa den karga suposatuko dugu. Honek esan nahi duFx = 0 eta Fy = 0 izango direla.
B x – A y = C
Z
Y
X
Figura 32: Karga bertikal eta jarraia jasaten duen kablea.
Ondorioz, lehenengo bi ekuazioak:
d(
T dxdS
)
= 0 eta d(
T dydS
)
= 0, honek esan nahi du: T dxdS = A eta T dy
dS = B

15 KARGA BERTIKAL JARRAIA JASATEN DUEN KABLEA 45
Honela: Adx = B
dy ⇒ B · dx− A · dy = 0 ⇒ B x− A y = C
Emaitza honetan oinarrituz, zera esan dezakegu; kurba hau laua da eta, X eta Y ardatzekosatzen duten planoarekiko ortogonala.
Kurba dagoen planoan ardatz berri batzuk kokatzen baditugu, non kasu honetan Z ar-datza Y ardatzarengatik ordezkatua izango den, oreka ekuazio cartesiarren hirugarren ekuazioahonela geratzen da:
dx
dS
X
Y
Figura 33: Kurbaren planoan ardatz berrien kokapena.
d
(
T dydS
)
+ Fy dS = 0
d
(
T dydx ·
dxdS
)
+ Fy dS = 0
X ardatz berriarekiko ekuazioa, kontuan izanda Fx = 0 dela:
d
(
T dxdS
)
= 0 ⇒ T dxdS = T0
Non T0 tentsioa, X ardatz berriarekiko paraleloa den tentsio da. Tentsio hau, kablearenedozein sekziok X ardatzarekiko paraleloa den osagaia da.
Emaitza hau aurreko espresioan ordezkatuz hurrengo emaitza lortzen dugu:
d
(
T0
dy
dx
)
+ Fy dS = 0
Suposatu dezagun orain kableak jasaten duen karga ez dagoela honen luzera unitatearekikoemanda, baizik eta absizaren unitatearekiko. Karga hau positiboa izango da, beherako no-rantza duenean, hau da, Y ardatzaren aurkako norantza duenean.
Praktikan, kableak absizako unitatearekiko jasaten duen karga honen pisu propioa bainoaskoz handiagoa denean ematen da, adibidez, kablean puntu batetik kablearen pisua bainoaskoz indar handia egiten duen masa bat zintzilikatua dagoenean.

16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 46
Fy dS
-p dx
Figura 34: Kableak, absiza unitateko karga jasaten duenean.
Honela, p izendatzen badugu kableak absiza unitatearekiko jasaten duen kargari:
Fy · dS = −p · dx
d(
T0dydx
)
− p · dx = 0 ⇒ ddx
(
T0dydx
)
= p ⇒ T0d2ydx2 = p
Eta hemendik espresio orokorra lortzen dugu:
d2y
dx2=
p
T0
16. KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNI-TATEAREKIKO KONSTANTEA JASATEN DUEN KABLEA
16.1. ALTURA BERDINEAN DAUDEN BERMAPUNTUAK
Kasu honetan, solido funikularrak bi bermapuntuak altura berdinean izateaz gain, absizaunitateko karga bertikal konstante jarraia jasaten du.
p
l
h
Y
X
Figura 35: Absiza unitateko karga ktea. eta altura berdinean dauden bermapuntuak.
Honela, aurreko atalean lortutako espresio diferentziala integratu behar dugu, p konstan-tea dela kontuan izanda:

16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 47
d2ydx2 = p
T0⇒ d
dx
(dydx
)
= pT0
⇒ d(dydx
)
= pT0
dx
Espresio hau integratuz:
dydx = p
T0x+C1 ⇒ dy = p
T0x dx+C1 dx ⇒ y = p
T0
x2
2 +C1 x+C2
Jarraian C1 eta C2 integrazio konstanteak kalkulatzeko ingurune baldintzak aplikatukoditugu, kontuan izanda aukeratutako erreferentzia ardatzak eta ezaugarri geometrikoak.
x = 0 denean:
y = 0
dydx = 0
Honela:
0 = pT0
02
2 + C1 0 + C2 ⇒ C2 = 0
0 = pT0
0 + C1 ⇒ C1 = 0
Ondorioz: y = pT0
x2
2
Ekuazio analitiko hau parabola bat da. Orain T0 tentsioaren balioa kalkulatzen badugu,hau da, solido funikularreko edozein puntuk X ardatzarekiko duen tentsioren osagaia, solidofunikularraren ekuazioa finkatuko duen ekuazioa kalkulatuko dugu, honetarako:
x = L2 denean, y = h dela baliatuko dugu:
h =pT0
L2
8 ⇒ T0 =p L2
8 h
Emaitza hau, kableak duen forma geometrikoa ematen duen ekuazioan ordezkatzen badugu,kableak hartzen duen forma kalkulatu dezakegu, soilik magnitude geometrikoen arabera:
y =p
p L2 8 h x2
2 ⇒ y = 4 hL2 x2
Ikus dezagun zein den kablearen edozein sekziotan sortzen den tentsioa:
T0 = T cos θp x = T sin θ—————————————————-T 2
0 + p2 x2 = T 2 (cos2 θ + sin2 θ) = T 2
Beraz: T =√
T 20 + p2 x2
Espresio honetan ikusten da T tentsioaren balioa handitu egiten dela x aldagaia hand-

16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 48
0
Y
X
T
T0
p x
x
θ
Figura 36: Kableak jasaten duen tentsioa.
itzearekin batera, eta normala den bezala, T tentsioak izango duen balio maximoa kablearenmuturretan emango da, hau da; x± L
2denean:
Tmax =
√
T 20 +
p2 L2
4
Kablearen edozein sekziotan sortzen den tentsioa kalkulatzeko erabili ditugun bi ekuazioekin,honen tangenteak x aldagaiaren funtzioan duen balioa kalkulatu dezakegu:
sin θcos θ
= p xT0
⇒ tan θ = p xT0
Erantzun bera erdietsi dezakegu, kableak hartzen duen kurba definitzen duen ekuazioanalitikoa deribatuz:
y′ = tan θ = p xT0
Kablearen luzera S kalkulatzeko, elementu diferentzial bat hartuko dugu:
dS =√
(dx)2 + (dy)2 = dx√
1 + (dxdy
)2
Gure kasuan y =pT0
x2
2 denez, eta: y′ =p xT0
dS =
√
1 + p2 x2
T 20
dx
Honela, espresio hau 0 eta L2
mugen artean integratuz, kablearen luzera erdia s kalkulatudezakegu:
s =∫ L
2
0
√√√√1 +
p2 x2
T 20
dx

16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 49
Integral hau egiteko, serien bidez burutuko dugu:√√√√1 +
(
p xT0
)2
= 1 + 12
(
p xT0
)2
− 18
(
p xT0
)4
+ · · ·
s =∫ L
2
0
(
1 +1
2
p2 x2
T 20
− 1
8
p4 x4
T 40
+ · · ·)
= L
(
1
2+
p2 L2
48 T 20
− p4 L4
1280 T 40
+ · · ·)
Luzera osoa S = 2 s denez:
S = L
(
1 + p2 L2
24 T 20
− p4 L4
640 T 40
+ · · ·)
Bestalde, pT0
= 8 hL2 denez, S = L
[
1 + 83
(hL
)2
− 325
(hL
)4
+ · · ·]
Honela, h altuera, L4
luzera baino txikiagoa denean, kablearen luzera osoa kalkulatzekoinguratze hau erabili daiteke:
S = L
[
1 + 83
(hL
)2
]
16.2. ALTURA DESBERDINEAN DAUDEN BERMAPUNTUAK
Kasu honetan kablea A eta B bermapuntuetan lotuta dago. Bermapuntu hauen arteandagoen altuera diferentzia h da, eta distantzia horizontala l. Orain, kableak jasaten duen ba-naketa uniformeko karga, AB lerroarekiko suposatzen dugu.
Erreferentzia ardatzak aukeratzerakoan, X ardatza AB lerroarekiko paraleloa aukeratukodugu, eta kurba honekiko tangentea 0 puntutik, puntu hau l baoaren erdian kokatua dagoe-larik. Bestalde, Y ardatza, 0 puntutik pasatu eta norabide bertikala duena da.
Ekuazio diferentziala aplikatuz:
d2ydx2 = p
T0
Bermapuntuak altuera berdinean dituen kasuan aplikatu ditugun ingurune baldintza berdi-nak aplikatuz, emaitza berdina lortzen dugu:
y = pT0
x2
2
Azpimarratu beharra dago, nahiz eta ekuazio honen itxura, aurreko emaitzaren berdinaizan, kasu honetan ekuazio hau ortogonalak ez diren ardatz batzuetan oinarrituta dagoela.

16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 50
M
X
A
B
c/2
c/2
c
0
f
h
l/2 l/2
l
X
Y
Figura 37: Absiza unitateko karga ktea. eta altura desberdinean dauden bermapuntuak.
T0 kableak 0 puntuan duen tentsioa da, kasu honetan erreferentzia sistemaren jatorrianduen tentsioa, eta p, solido funikularrak AB lerroarekiko jasaten duen banaketa uniformekokarga.
Kableak, sekzio desberdinetan jasaten duen tentsioa kalkulatzeko:
0 puntuak jasaten duen T0 tentsioa:
Aukeratu dugun erreferentzia sisteman B puntuaren koordenatuak:
x = c2 =
√h2 + l2
2
y = f
Balio hauek, kurbaren ekuazioan ordezkatuz:
f = pT0
h2 + l22 · 4 ⇒ T0 =
p(
h2 + l2)
8 · f
A eta B muturrek jasaten duten tentsioa:
Solido funikularra, bere oreka kokapenean zurruna dela suposatuz zera ondorioztatudezakegu:

16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 51
TBH
TBB TB
B β
αT0
TAH
TAB TA
θ
M
X
A
N
P
S
0
h
l
X
Y
Figura 38: A eta B puntuetan sortzen den tentsioa, TABtentsioak gorako norantza duenean.
TAH= TBH
Jarraian, A eta 0 sekzioen artean dagoen kable zatia isolatuz:
TAH= T0 cos α =
p(
h2 + l2)
8 · f · l√h2 + l2
=p · l8 · f ·
√h2 + l2
Ondorioz: TAH= TBH
= p · l8 · f ·
√h2 + l2
TABeta TBB
tentsio bertikalei dagokienez, hurrengo bi kasu desberdinak kontuan hartuditzakegu:
1. TABtentsioak gorako norantza izatea:
Kasu honetan:
tan θ = NSAS
= MN −MSAS
=2 f − h/2
l/2= 4 f − h
l
Emaitza honetan ikusten dugunez; 4 f > h da.
TAB= TAH
· tan θ
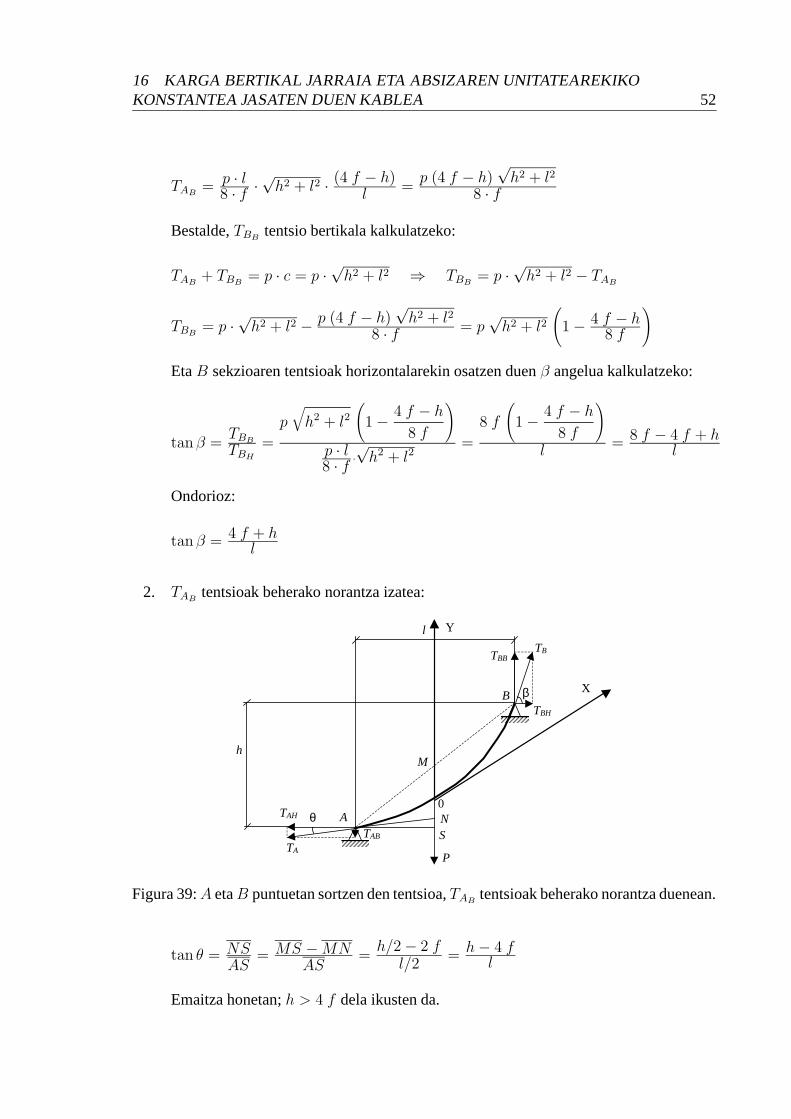
16 KARGA BERTIKAL JARRAIA ETA ABSIZAREN UNITATEAREKIKOKONSTANTEA JASATEN DUEN KABLEA 52
TAB= p · l
8 · f ·√
h2 + l2 · (4 f − h)l =
p (4 f − h)√
h2 + l2
8 · f
Bestalde, TBBtentsio bertikala kalkulatzeko:
TAB+ TBB
= p · c = p ·√
h2 + l2 ⇒ TBB= p ·
√h2 + l2 − TAB
TBB= p ·
√h2 + l2 − p (4 f − h)
√h2 + l2
8 · f = p√
h2 + l2(
1− 4 f − h8 f
)
Eta B sekzioaren tentsioak horizontalarekin osatzen duen β angelua kalkulatzeko:
tanβ =TBB
TBH
=
p√
h2 + l2(
1− 4 f − h
8 f
)
p · l8 · f ·
√h2 + l2
=
8 f
(
1− 4 f − h
8 f
)
l = 8 f − 4 f + hl
Ondorioz:
tanβ = 4 f + hl
2. TABtentsioak beherako norantza izatea:
0
TBH
TBB TB
B β
TAH
TAB
TA
θ
M
A N
P
S
h
l
X
Y
Figura 39: A eta B puntuetan sortzen den tentsioa, TABtentsioak beherako norantza duenean.
tan θ = NSAS
= MS −MNAS
=h/2− 2 f
l/2= h− 4 f
l
Emaitza honetan; h > 4 f dela ikusten da.
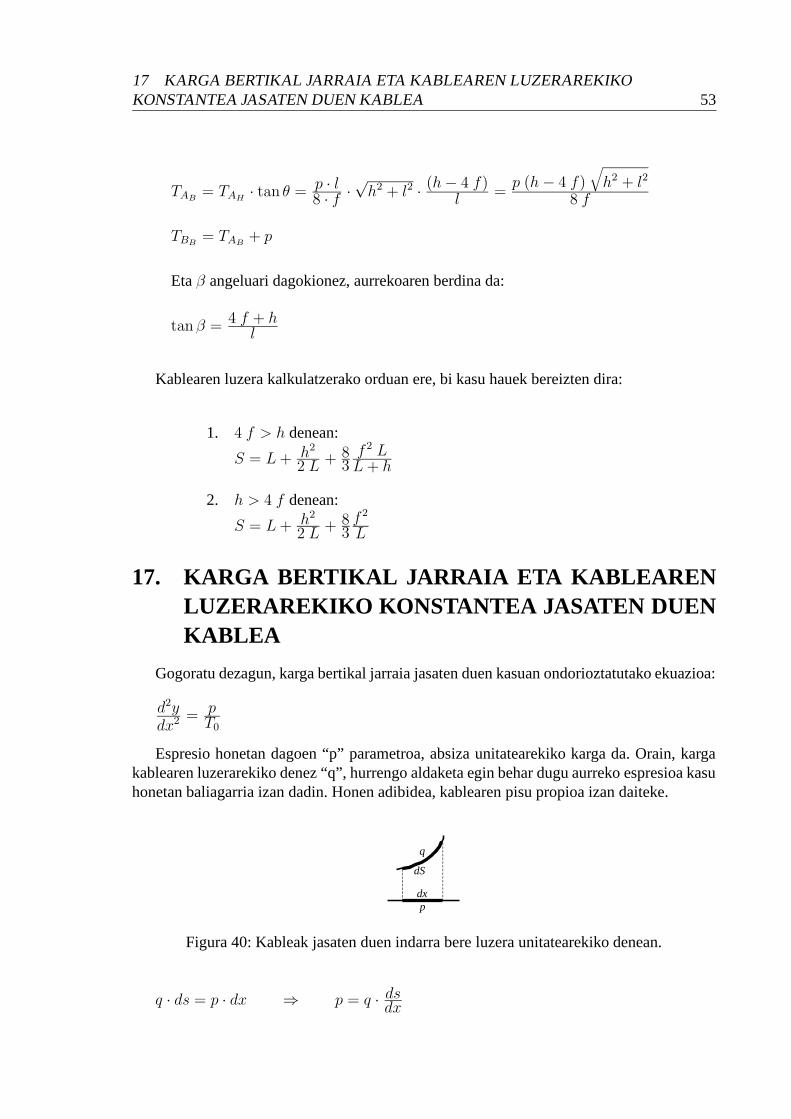
17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 53
TAB= TAH
· tan θ = p · l8 · f ·
√h2 + l2 · (h− 4 f)
l =p (h− 4 f)
√
h2 + l2
8 f
TBB= TAB
+ p
Eta β angeluari dagokionez, aurrekoaren berdina da:
tanβ = 4 f + hl
Kablearen luzera kalkulatzerako orduan ere, bi kasu hauek bereizten dira:
1. 4 f > h denean:
S = L + h2
2 L + 83
f 2 LL + h
2. h > 4 f denean:
S = L + h2
2 L + 83
f 2
L
17. KARGA BERTIKAL JARRAIA ETA KABLEARENLUZERAREKIKO KONSTANTEA JASATEN DUENKABLEA
Gogoratu dezagun, karga bertikal jarraia jasaten duen kasuan ondorioztatutako ekuazioa:
d2ydx2 = p
T0
Espresio honetan dagoen “p” parametroa, absiza unitatearekiko karga da. Orain, kargakablearen luzerarekiko denez “q”, hurrengo aldaketa egin behar dugu aurreko espresioa kasuhonetan baliagarria izan dadin. Honen adibidea, kablearen pisu propioa izan daiteke.
q
dS
dx p
Figura 40: Kableak jasaten duen indarra bere luzera unitatearekiko denean.
q · ds = p · dx ⇒ p = q · dsdx

17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 54
Emaitza hau ekuazio diferentzialean ordezkatuz:
d2ydx2 =
qT0· dsdx
Bestalde, luzera elementu diferentzialetan hurrengo berdinketa betetzen denez:
dsdx =
√
1 +(dydx
)2
Ekuazio diferentziala honela geratzen da:
d2ydx2 =
qT0·√
1 +(dydx
)2
Ekuazio hau integratzeko, dydx
= u aldaketa egingo dugu:
dudx = q
T0·√
1 + u2 ⇒ du√1 + u2
= qT0
dx
Lehenengo integrazio batean:
ln(
u +√
1 + u2
)
=qT0
x + C1
Jarraian, hurrengo erreferentzia sistema aukeratzen badugu ; X ardatza kurbaren puntuberenetik honekiko tangentea, eta Y ardatza, tangentziako puntu honetatik pasatu eta aur-reko ardatzarekiko ortogonala dena, lehenengo ingurune baldintza aplikatu dezakegu: x = 0denean; dy
dx= u = 0 da. Baldintza hau, ekuazio diferentziala lehenengoz integratzerakoan
lortu dugun emaitzan ordezkatuz, C1 integrazio konstantea kalkulatu dezakegu:
0
Y
X
Figura 41: X ardatza 0 puntuan kurbarekiko tangente, eta Y ardatza aurrekoarekiko normala.
ln(
0 +√
1 + 02
)
= qT0
0 + C1 ⇒ C1 = ln 1 = 0
Beraz:
ln(
u +√
1 + u2
)
= qT0· x

17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 55
Adierazpen hau garatuz:
u+√
1 + u2 = eq
T0·x ⇒
√1 + u2 = e
q
T0·x−u ⇒
(√1 + u2
)2
=(
eq
T0·x−u
)2
1 + u2 = e2 q
T0·x
+ u2 − 2 u eq
T0·x ⇒ 2 u e
q
T0·x
= e2 q
T0·x − 1 ⇒ u = e
2 q
T0·x − 1
2 eq
T0·x
u =(e
2 q
T0·x − 1) · e−
q
T0·x
2 = eq
T0·x − e
−q
T0·x
2 = sinh qT0· x
Ondorioz:
dydx = sinh
qT0· x
Ekuazio diferentzial hau berriro integratuz:
y = T0q · cosh q
T0· x + C2
Honela, ingurune baldintzetatik, x = 0 denean y = 0 dela aplikatuz:
0 = T0q · cosh
q
T0
· 0︸ ︷︷ ︸
cosh 0=1
+C2 ⇒ C2 = −T0q
Emaitza hau aplikatuz:
y = T0q · cosh
qT0· x− T0
q
Adierazpen hau sinplifikatzea nahi badugu, erreferentzia sistemaren jatorria trasladatuegin dezakegu 0 puntutik, T0
qdistantzia beherago dagoen 01 puntura. Honela, erreferentzia
sistema berriarekin:
q
T0=α
01
0
Y
X
Figura 42: Aurreko erreferentzia sistema α distantzia jaitsiz.
y = T0q · cosh q
T0· x

17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 56
Azkenik, T0
q= α eginez:
y = α coshx
α
Kasu honetan solido funikularrak ekuazio honek zehazten duen forma hartzen du. Formahau kosinu hiperboliko bati dagokiona da eta katenaria deitzen zaio.
Bestalde, emaitza hau erabiliz, eta kontuan izanda kurba honen edozein puntuk duen mal-da puntu horretan espresio orokorraren deribatuarekin kalkulatu daitekeela:
tan θ = y′ =dydx = α 1
α sinh xα ⇒ y′ = sinh x
α
Katenaria baten arkuak duen luzera
Katenariaren 0 puntua, eta x absiza duen puntuaren artean dagoen arkuaren luzera:
s =∫ x
0
√
1 + y′2 dx =∫ x
0
√
1 + sinh2 x
αdx =
∫ x
0
cosh xα dx = α sinhx
α
17.1. ALTUERA BERDINEAN DAUDEN BI PUNTUREN ARTEKOKATENARIA
Puntu hauen arteko distantzia l da, eta katenariaren gezia f .
l
f
B A
α
01
0
Y
X
Figura 43: Bermapuntuak altuera berdinean dituen katenaria.
1. l eta f parametroak ezagunak direla suposatuko dugu.
Katenariaren ekuazioa:
y = α cosh xα

17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 57
Irudian ikus daitekeen bezala, B puntua katenariakoa da, eta bere koordenatuak hur-rengo hauek dira:
xB = l2 ; yB = α + f
α + f = α cosh l2 α ⇒ α + f
α = cosh l2 α
Hurrengo izendapenak eginez: β = l2 α
, ondorioz; α = l2 β
:
l2 β
+f
l2 β
= cosh β ⇒ l + 2 β fl = cosh β ⇒ 1 +
2 β fl = cosh β
Azkenik:
2 f
lβ = cosh β − 1
Ekuazio honetan gutxi gora-beherako kalkulua erabiliz β kalkulatuko da, ondoren ap-likatu ditugun ekuazioak erabilita α kalkulatuko dugu katenariaren ekuazioa lortzeko.
2. Bestalde, l eta f ezagutu beharrean, l eta ST (katenariaren luzera osoa) ezagutzen ba-ditugu:
0 puntua eta x absiza duen puntuaren artean dagoen katenariaren luzera, aurretik on-dorioztatu dugu s = α sinh x
αdela, ondorioz katenariaren luzera osoa:
ST = 2 α sinh l2 α
Lehen erabilitako izendapena aplikatuz; β = l2 α
, eta α = l2 β
:
ST2α = sinh β ⇒ l
2 αST
l = sinh β
Eta hemendik:
ST
lβ = sinh β
Kasu honetan ere, β parametroa gutxi gora-beherako kalkulua eginez lortuko dugu,ondoren α kalkulatuz katenariaren ekuazio ezagutzeko.
Tentsioa

17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 58
s
0
T
T0
q s
x
θ
Y
X
Figura 44: Katenaria bateko edozein sekziok jasaten duen tentsioa.
Katenariaren edozein puntuk jasaten duen tentsioa kalkulatzeko, honen zati bat isolatzendugu, jadanik ondorioztatu ditugun ekuazioak aplikatzeko:
T cos θ = T0
T sin θ = q s—————————————————-T 2 (cos2 θ + sin2 θ) = T 2
0 + q2 s2 = T 2
Kasu honetan tentsioaren balioa: T =√
T 20 + q2 s2
Katenariaren luzera kalkulatzeko ekuaziotik abiatuta:
s = α sinh xα = T0
q sinh qT0
x ⇒ q s = T0 sinh xα ⇒ q2 s2 = T 2
0 sinh2 xα
Adierazpen hau tentsioaren ekuazioan ordezkatuz:
T =√
T 20 + T 2
0 sinh2 xα = T0
√
1 + sinh2 x
α︸ ︷︷ ︸
cosh2 x−sinh2 x=1
= T0
√
cosh2 xα = T0 cosh x
α
T = T0q q cosh x
α = q α cosh xα = y q
Ondorioz:
T = q · y
Emaitza honetan oinarrituz esan dezakegu, kable batek puntu batean duen tentsioa, puntuhonen ordenatua duen luzerako kablea hartuta, bere pisuaren berdina dela.
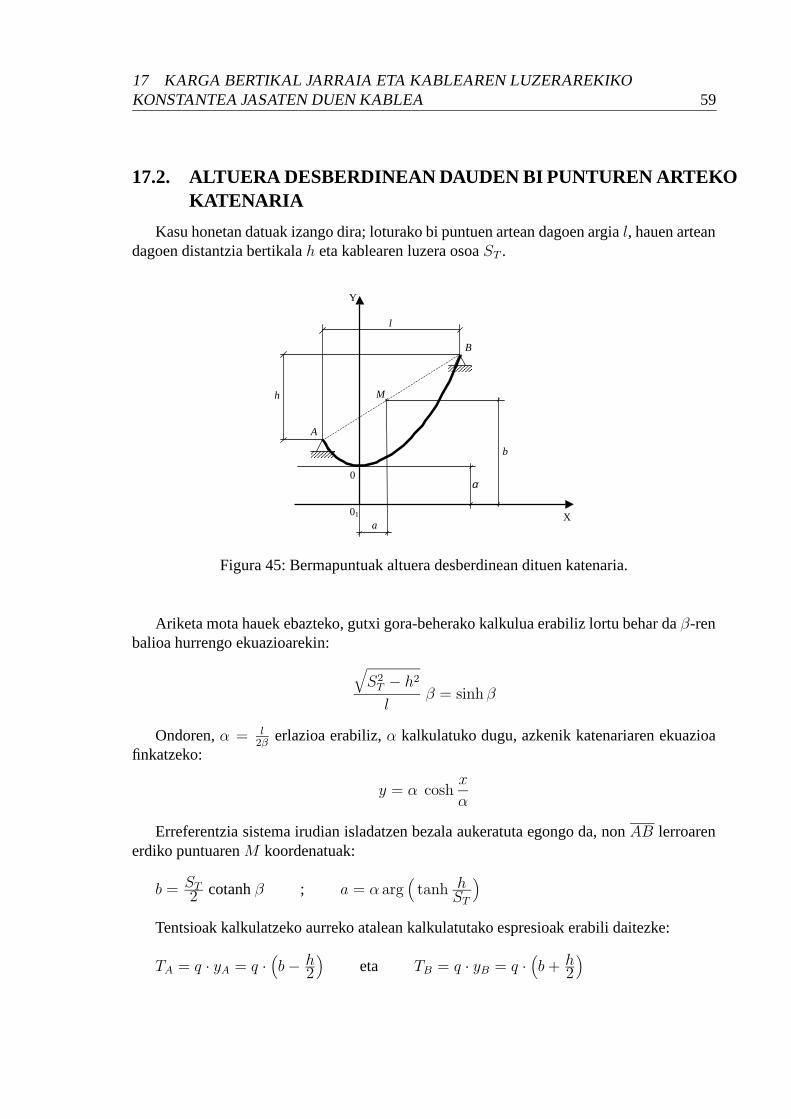
17 KARGA BERTIKAL JARRAIA ETA KABLEAREN LUZERAREKIKOKONSTANTEA JASATEN DUEN KABLEA 59
17.2. ALTUERA DESBERDINEAN DAUDEN BI PUNTUREN ARTEKOKATENARIA
Kasu honetan datuak izango dira; loturako bi puntuen artean dagoen argia l, hauen arteandagoen distantzia bertikala h eta kablearen luzera osoa ST .
01
A
B
a
0
b
h
α
M
l
X
Y
Figura 45: Bermapuntuak altuera desberdinean dituen katenaria.
Ariketa mota hauek ebazteko, gutxi gora-beherako kalkulua erabiliz lortu behar da β-renbalioa hurrengo ekuazioarekin:
√
S2T − h2
lβ = sinh β
Ondoren, α = l2β
erlazioa erabiliz, α kalkulatuko dugu, azkenik katenariaren ekuazioafinkatzeko:
y = α coshx
α
Erreferentzia sistema irudian isladatzen bezala aukeratuta egongo da, non AB lerroarenerdiko puntuaren M koordenatuak:
b = ST2 cotanh β ; a = α arg
(
tanh hST
)
Tentsioak kalkulatzeko aurreko atalean kalkulatutako espresioak erabili daitezke:
TA = q · yA = q ·(
b− h2
)
eta TB = q · yB = q ·(
b + h2
)
18 LAN BIRTUALEN PRINTZIPIOA 60
18. LAN BIRTUALEN PRINTZIPIOA
Bedi orekan dagoen n partikula materialekin osatutako sistema.
Partikula bakoitzaren orekak exigitzen duen bezala, partikula bakoitzean aplikatutako in-darren erresultanteak zero izan behar du, beraz:
~F1 = ~0~F2 = ~0...~Fi = ~0...~Fn = ~0
i eskalarraren balioa 1 eta n artean dago,non “n” patikulen kopuru osoa den.
Kontuan hartuz partikula bakoitzean eragiten duten indarrak sistemarekiko kanpokoak~Fik eta barnekoak ~Ri direla:
~F1k + ~R1 = ~0~F2k + ~R2 = ~0...~Fik + ~Ri = ~0...~Fnk + ~Rn = ~0
(i=1,2,. . .,n)
Orain partikula bakoitzarentzat desplazamendu birtual bat suposatzen badugu, δ~ri, nondesplazamendu hau ausazkoa den baina sistemak duen loturekiko koherentea, eta δ~ri bakoitza,partikula bakoitzari eragiten dion indarrarekin eskalarki biderkatzen badugu, partikula bakoitzarenlan birtuala erdietsiko dugu:
δWi = (~Fik + ~Ri) · δ~ri
Lan birtual honek orokorrean edozein balio har dezake, baina sistema orekan dagoen ka-su konkretuarentzat bere balioa zero izango da, lehenengo faktorea zero delako:
δWi = ~Fik · δ~ri + ~Ri · δ~ri = 0
Sistema honek dituen lotura guztiak idealak izaten badira, hau da marruskadura gabekoak,lotura indarrak duten norabidea loturekiko ortogonala izango da, eta δ~ri desplazamenduakloturekiko koherenteak izan behar dutenez, ~Ri bektoreekiko ortogonalak izan beharko dute,ondorioz; ~Ri · δ~ri = 0
Ondorioz, sistema osatzen duten partikula guztien lan birtualak gehituz:
δWi =i=n∑
i=1
~Fik · δ~ri = 0

18 LAN BIRTUALEN PRINTZIPIOA 61
Sistemaren oreka finkatzen duen ekuazio honi, lan birtualen printzipioa deitzen zaio.
Ekuazioan fijatuz gero, bere garapenean agertuko diren batugaiak eta kanpo indarrakkopuru berdinean daude, eta δ~ri desplazamenduak, loturek ahalbideratzen dutenak izangodira.
Jarraian, ekuazio hau koordeneatu orokortuetan espresatuko dugu.
~Fi kanpo indar baten espresio analitikoa honela errepresentatu ahal izango dugu:
~Fi = Fxi~i + Fyi
~j + Fzi~k
Eta, δ~ri desplazamendu birtualen espresioa:
δ~ri = δxi~i + δyi
~j + δzi~k
Ondorioz, lan birtualen espresioak forma hau hartuko du:
δW =i=n∑
i=1
[
Fxiδxi + Fyi
δyi + Fziδzi
]
= 0
Sistema honek dituen lotura guztiak holonomoak direla suposatzen badugu, sistemarenaskatasun maila eta honen kokapena finkatzen duten koordenatu orokortuen edo parametrolagrangearren kopurua berdina izango da. Lehendik aplikatutako anotazioarekin jarraituz,bedi µ parametro lagrangearren kopurua eta k parametro hauetako ausazko bat, non k parametroa1 eta µ artean egongo den.
Sistemaren puntu guztiek duten 3 koordenatu cartesiarrak, eta µ parametro lagrangearrakhurrengo ekuazioen bidez erlazionatzen dira:
xi = xi(q1, q2, . . . , qµ, t)yi = yi(q1, q2, . . . , qµ, t)zi = zi(q1, q2, . . . , qµ, t)
i parametroa 1 eta n balioen artean dago
Hartu dezagun sistema hau une jakin batean. Sistemaren kokapena definitzen duten ko-ordenatu hauek datu jakin batzuk izango dituzte.
Denbora finko mantenduz, koordenatu orokortuentzat desplazamendu birtualak hartuditzakegu, beti ere loturekin konpatibeak izanda.
Aurreko ekuazioak denbora konstante mantenduz diferentziatu egiten baditugu, carte-siarretan espresatutako desplazamendu birtualak eta parametro lagrangearren arteko erlazioakalkulatuko dugu:
δxi = ∂xi
∂q1δq1 + ∂xi
∂q2δq2 + · · ·+ ∂xi
∂qµδqµ =
k=µ∑
k=1
Lik δqk Non; Lik =∂xi
∂qk

18 LAN BIRTUALEN PRINTZIPIOA 62
δyi =k=µ∑
k=1
Mik δqk Non; Mik =∂yi
∂qk
δzi =k=µ∑
k=1
Nik δqk Non; Nik =∂zi
∂qk
Balio hauek, lan birtualak cartesiarretan adierazita dauden espresioetan ordezkatuz:
δW =i=n∑
i=1
[
Fxi
k=µ∑
k=1
Lik δqk + Fyi
k=µ∑
k=1
Mik δqk + Fzi
k=µ∑
k=1
Nik δqk
]
= 0
Bestalde, qk koordenatu orokorrari lotua dagoen indarrari Qk izendapena jartzen badio-gu, non indar honen espresioa hurrengo den:
Qk =i=n∑
i=1
~Fi
∂~ri
∂qk
=i=n∑
i=1
(
Fxi
∂xi
∂qk
+Fyi
∂yi
∂qk
+Fzi
∂zi
∂qk
)
=i=n∑
i=1
(FxiLik +Fyi
Mik +FziNik)
Ondorioz, lan birtualen ekuazioa honela geratuko zaigu:
δW =k=µ∑
k=1
Qk δqk = 0
Espresio hau, lan birtualen espresioa da koordenatu orokor edo lagrangearretan.
Sistemaren konfigurazioa definitzeko behar diren µ parametro lagrangearrak guztiz be-harrezkoak direnak soilik badira, eta sistemak soilik lotura holonomoak izaten baditu, δqk
parametroak beraien artean independenteak dira, ondorioz:
Q1 = 0Q2 = 0...Qk = 0...Qµ = 0
k eskalarraren balioa 1 eta µ artean dago,non “µ” parametro lagrangearren kopurua den.
Honek, µ ekuazio, µ parametro ezezagunekin (qk parametro lagrangearrak) osatutako sis-tema bat errepresentatzen du. Ekuazio hauek askatuz, sistemaren oreka kokapena zehaztenda.
Aipatu behar da prozedura honetan ~Ri lotura indarrak desagertu egin direla, arrazoi ho-nengatik metodo hau erabiliz ezingo dugu lotura indarrak kalkulatu.