Embed Size (px)
DESCRIPTION
Informe-Finitos--1
Citation preview
“Año de la consolidación del Mar de Grau”
UNIVERSIDAD NACIONAL DE INGENIERIA
FACULTAD DE INGENIERÍA MECÁNICAPRIMERA PRACTICA“TRACCION SIMPLE”
Curso: Calculo por Elemento Finitos
Sección: “E”
Docente Cueva Pacheco, Ronald
Estudiante: Código:
Velásquez Párraga Diego Ayrton 20130297H
Periodo Académico: 2016-I
LIMA-PERU2016
PRIMERA PRÁCTICA
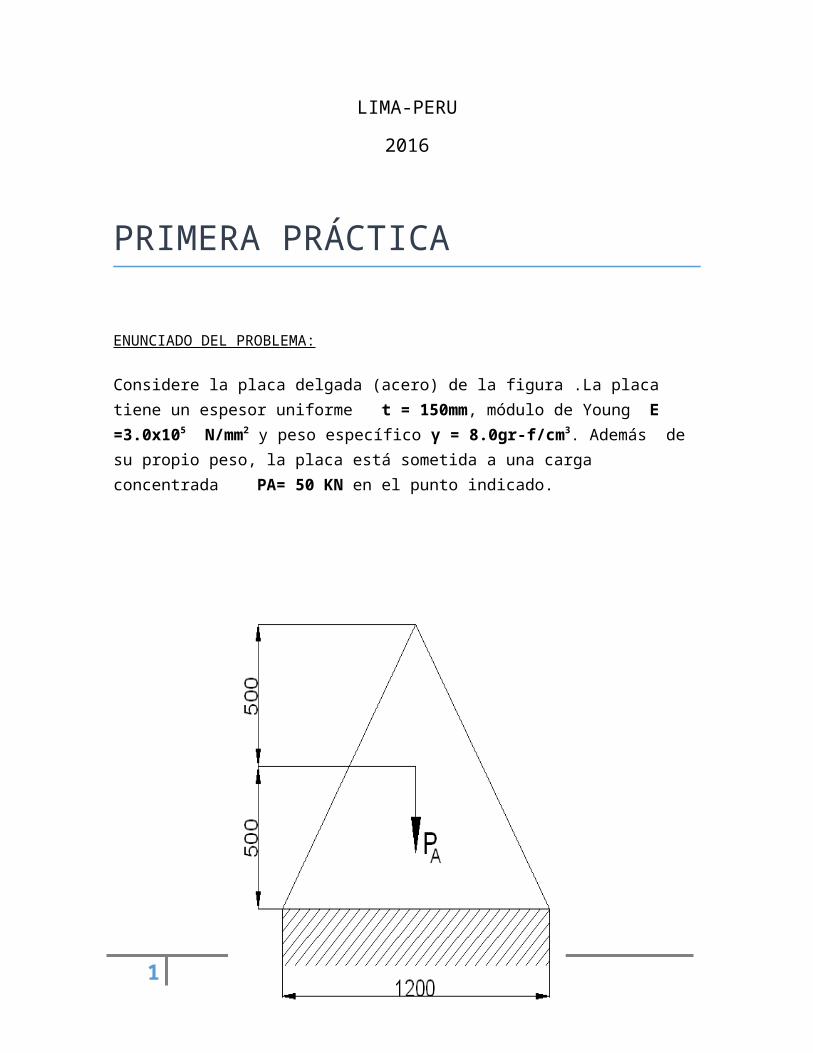
ENUNCIADO DEL PROBLEMA:
Considere la placa delgada (acero) de la figura .La placa tiene un espesor uniforme t = 150mm, módulo de Young E =3.0x105 N/mm2 y peso específico γ = 8.0gr-f/cm3. Además de su propio peso, la placa está sometida a una carga concentrada PA= 50 KN en el punto indicado.
1
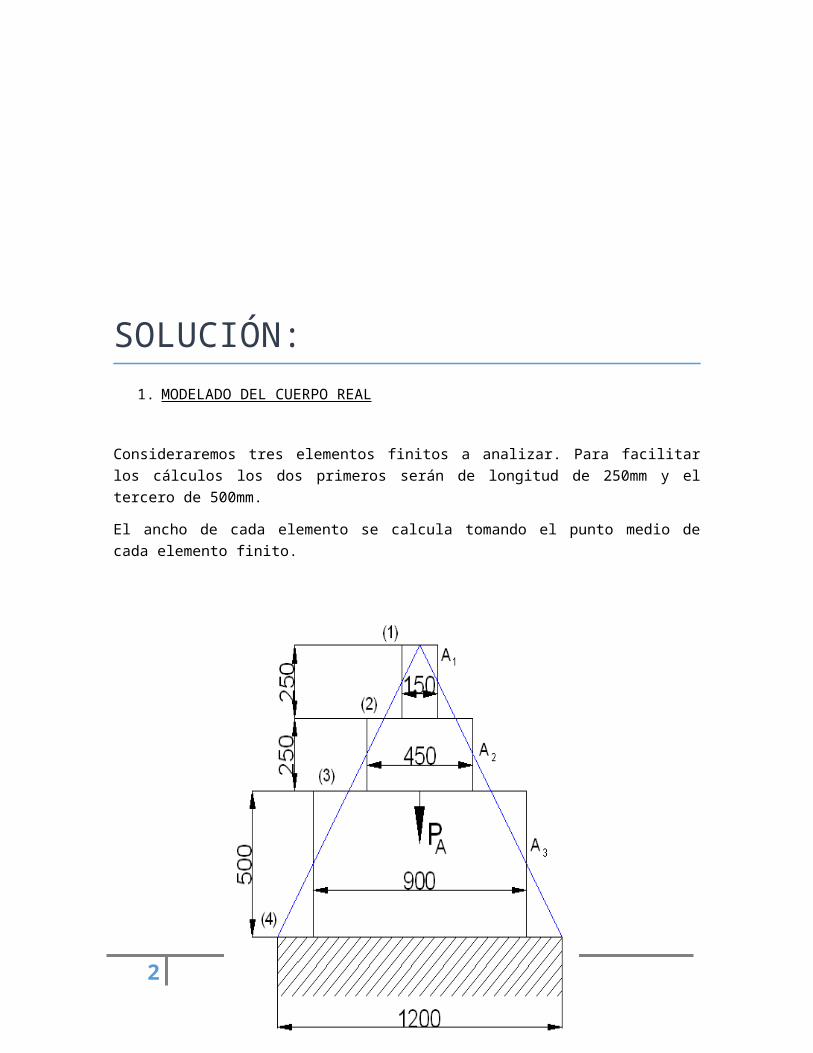
SOLUCIÓN:1. MODELADO DEL CUERPO REAL
Consideraremos tres elementos finitos a analizar. Para facilitar los cálculos los dos primeros serán de longitud de 250mm y el tercero de 500mm.
El ancho de cada elemento se calcula tomando el punto medio de cada elemento finito.
Hallando las bases medias por proporcionalidad:
b3=1200−2∗600∗5002000
=900mm
b2=450mm
b1=150mm
2
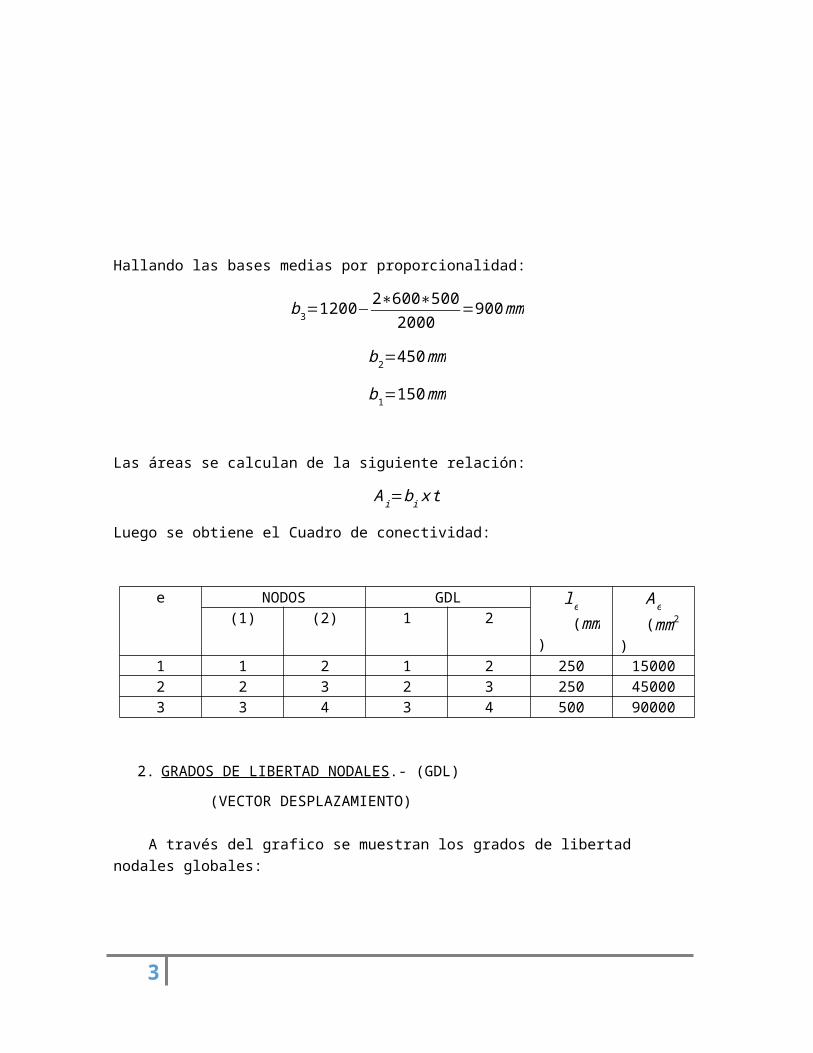
Las áreas se calculan de la siguiente relación:
Ai=bi x t
Luego se obtiene el Cuadro de conectividad:
e NODOS GDL le (mm)
Ae (mm2)(1) (2) 1 2
1 1 2 1 2 250 150002 2 3 2 3 250 450003 3 4 3 4 500 90000
2. GRADOS DE LIBERTAD NODALES .- (GDL)
(VECTOR DESPLAZAMIENTO)
A través del grafico se muestran los grados de libertad nodales globales:
3
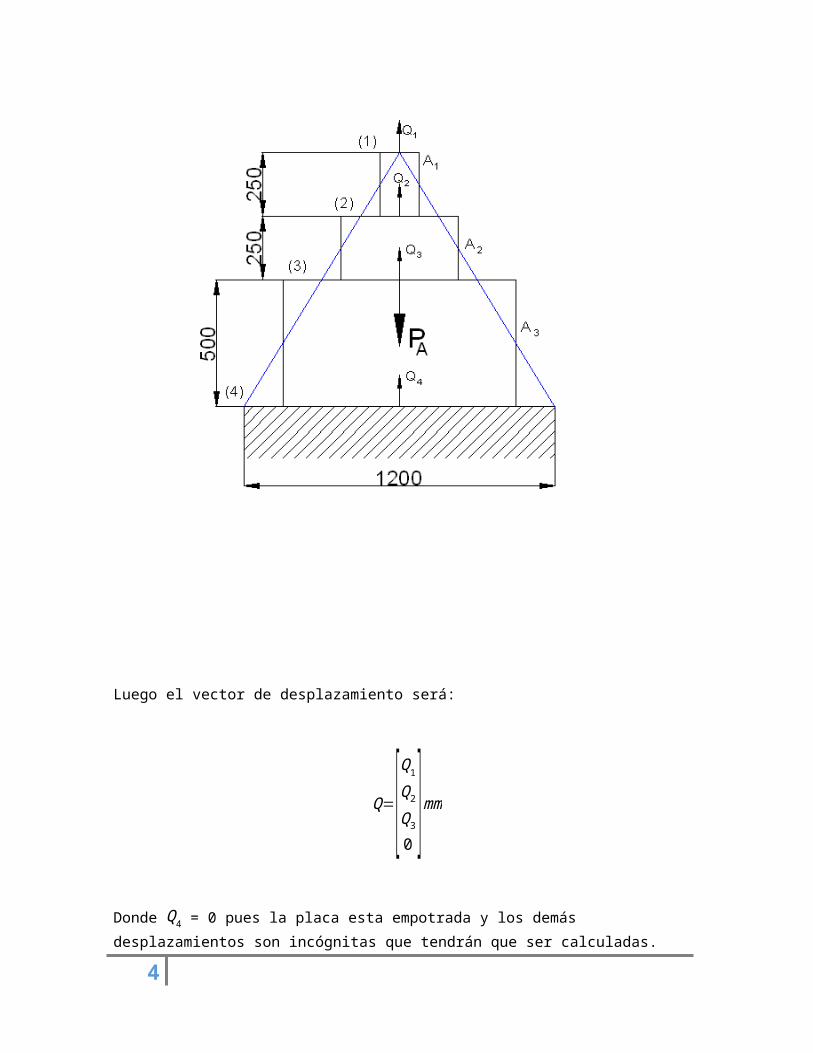
Luego el vector de desplazamiento será:
Q=[Q1Q2Q30
]mmDonde Q4 = 0 pues la placa esta empotrada y los demás desplazamientos son incógnitas que tendrán que ser calculadas.
.
3. VECTOR CARGA
4
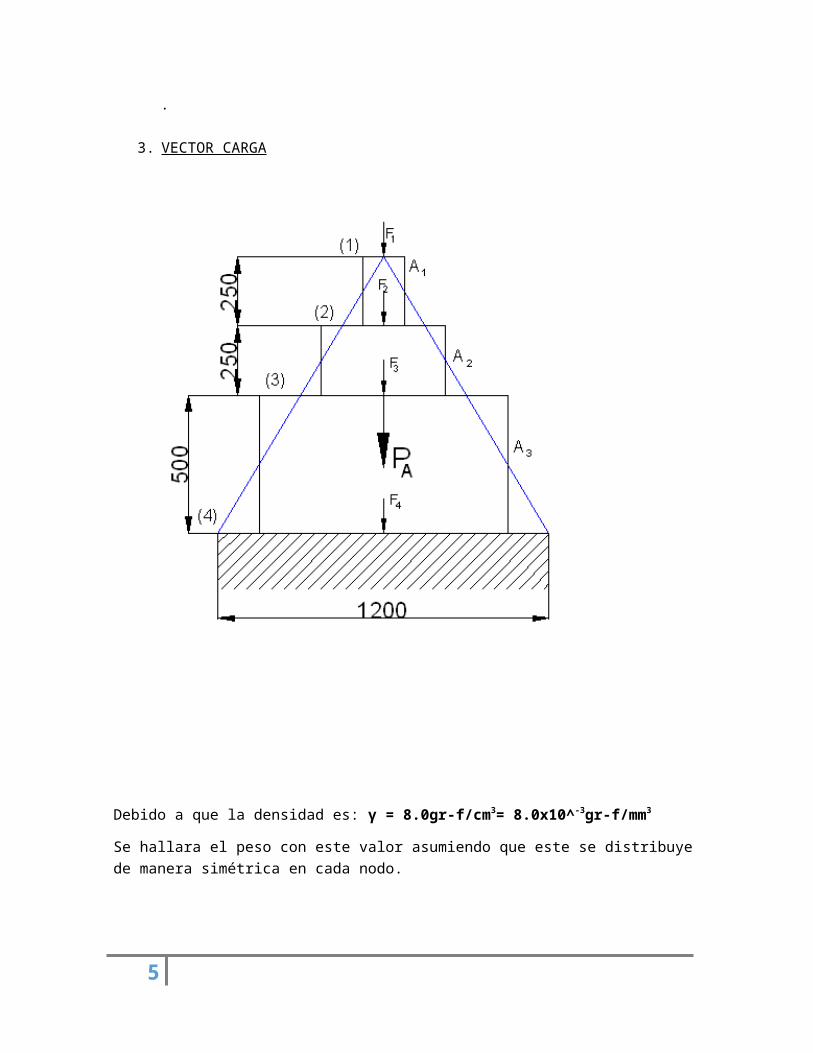
Debido a que la densidad es: γ = 8.0gr-f/cm3= 8.0x10^-3gr-f/mm3
Se hallara el peso con este valor asumiendo que este se distribuye de manera simétrica en cada nodo.
Analizando las fuerzas en cada elemento finito:
F11=
−γ ( Axl)12 =−15000
F21=
−γ ( Axl)12 =−15000
F22=
−γ ( Axl)22 =−45000
F32=
−γ ( Axl )22 −FA=−45000−3058103.97
F33=
−γ (Axl )32
=−180000
F43=
−γ (Axl )32 +R4=−180000+R4
Ahora analizamos las fuerzas para todo el cuerpo:
F1=F11=−15000 grf
F2=F21+F2
2=−60000grf
F3=F32+F3
3=−3283103.97 grf
F4=F43+F4
4=−180000+R4
Entonces el vector carga se expresara de la siguiente manera:
F=[F1F2F3F4]=[ −15000−60000
−3283103.97−180000+R4
] grf= 9.811000x [ −15000
−60000−3283103.97−180000+R4
]N5

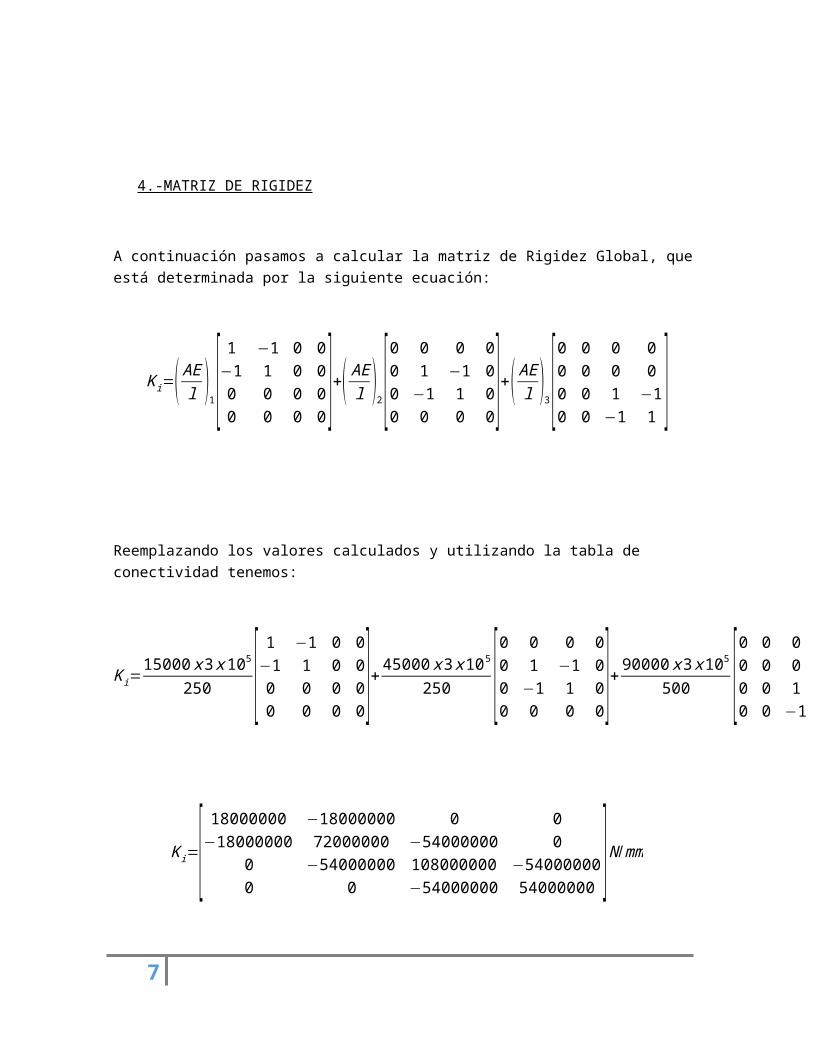
4.-MATRIZ DE RIGIDEZ
A continuación pasamos a calcular la matriz de Rigidez Global, que está determinada por la siguiente ecuación:
K i=( AEl )1[ 1−100
−1100
0000
0000]+( AEl )
2[000001
−10
0−110
0000]+( AEl )
3[00000000
001
−1
00
−11 ]
Reemplazando los valores calculados y utilizando la tabla de conectividad tenemos:
K i=15000 x3 x105
250 [ 1−100−1100
0000
0000]+ 45000 x3 x105250 [0000
01
−10
0−110
0000]+ 90000 x3 x105500 [0000
0000
001
−1
00
−11 ]
K i=[ 18000000−1800000000
−1800000072000000
−540000000
0−54000000108000000−54000000
00
−5400000054000000 ]N /mm
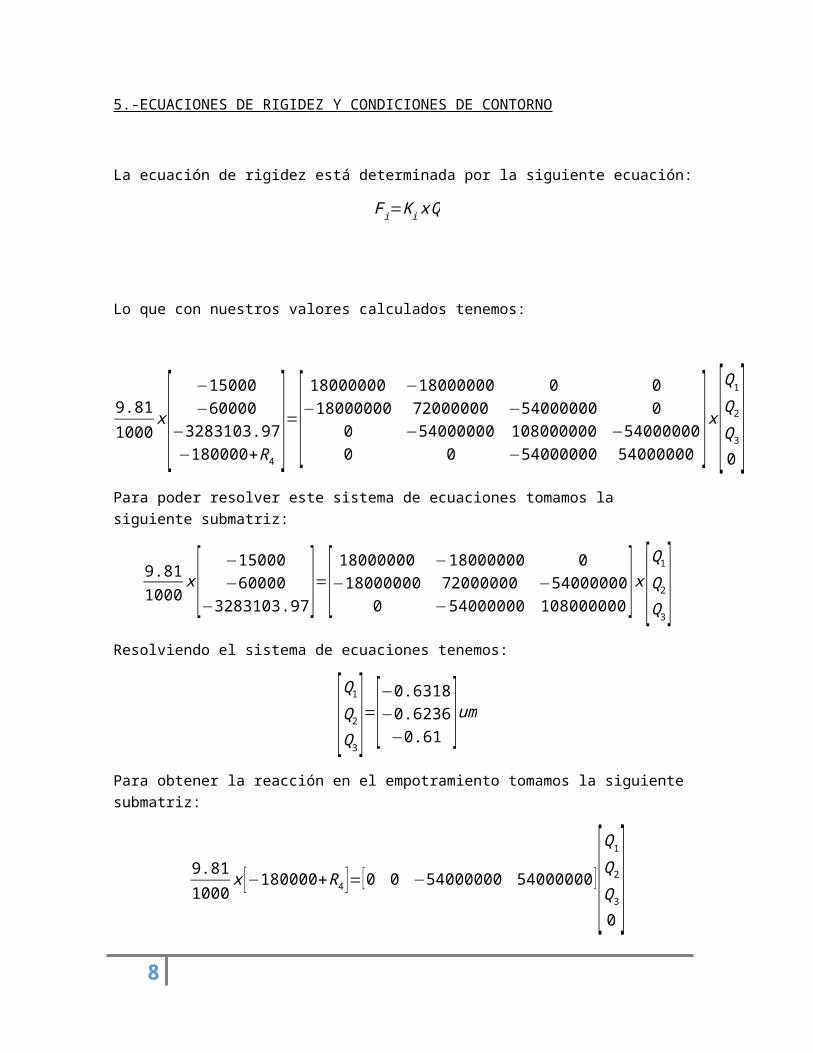
5.-ECUACIONES DE RIGIDEZ Y CONDICIONES DE CONTORNO
La ecuación de rigidez está determinada por la siguiente ecuación:
F i=K i x Q
6
Lo que con nuestros valores calculados tenemos:
9.811000
x [ −15000−60000
−3283103.97−180000+R4
]=[ 18000000−1800000000
−1800000072000000
−540000000
0−54000000108000000−54000000
00
−5400000054000000 ] x [Q1Q2Q3
0]
Para poder resolver este sistema de ecuaciones tomamos la siguiente submatriz:
9.811000
x [ −15000−60000
−3283103.97 ]=[ 18000000−180000000
−1800000072000000
−54000000
0−54000000108000000 ] x [Q1Q2Q3]
Resolviendo el sistema de ecuaciones tenemos:
[Q1Q2Q3]=[−0.6318−0.6236−0.61 ]um
Para obtener la reacción en el empotramiento tomamos la siguiente submatriz:
9.811000
x [−180000+R4 ]= [0 0 −54000000 54000000 ][Q1Q2Q30
]Reemplazando los valores de Q obtenemos:
9.811000
x [−180000+R4 ]= [0 0 −54000000 54000000 ][−0.63−0.62−0.610 ]
R4=3357978.165grf
6.-ESFUERZOS
Para calcular los valores de los esfuerzos por elemento, aplicamos la siguiente ecuación:
7
σ e=( El )e [−1 1 ] [ QiQ i+1]Y obtenemos lo siguiente:
σ 1=( 3.0 x105250 )1
[−1 1 ] [−0.6318−0.6236] x10−3=0.00984MPa
σ 2=( 3.0 x105250 )2
[−1 1 ] [¿−0.6236−0.61 ] x10−3=0.00984MPa
σ 3=( 3.0 x105500 )3
[−1 1 ][−0.610 ] x10−3=0.366MPa
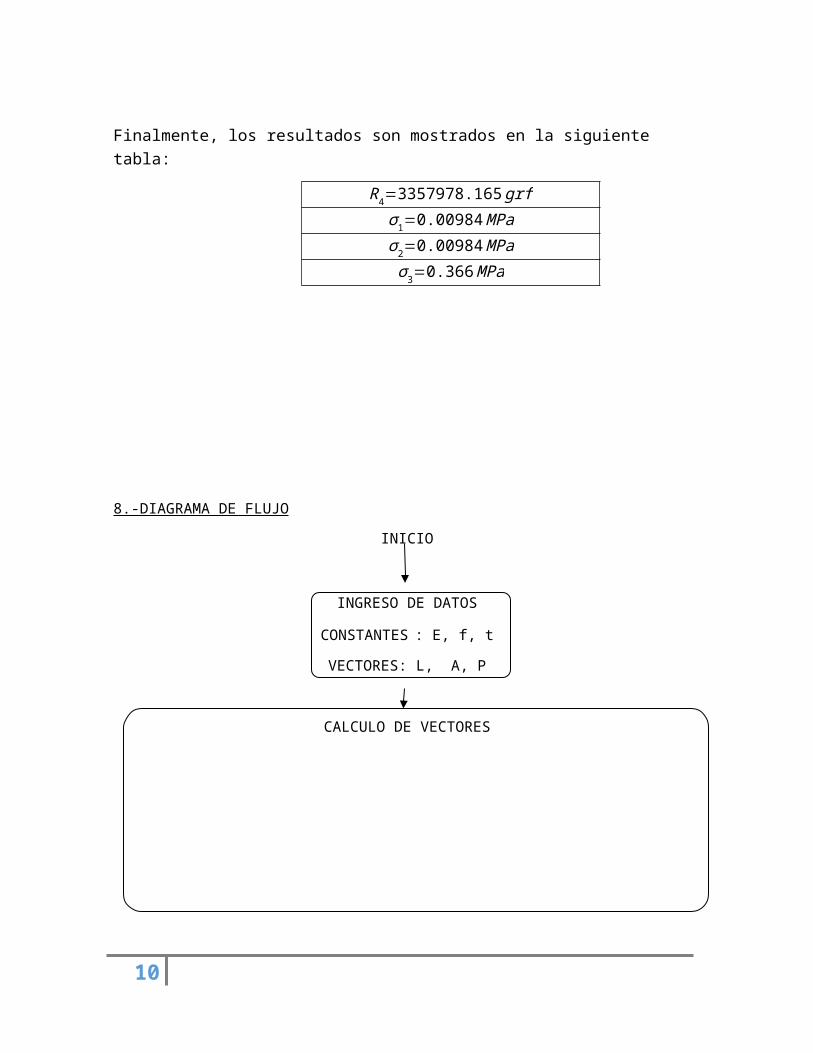
7.-RESULTADOS
Finalmente, los resultados son mostrados en la siguiente tabla:
R4=3357978.165grfσ 1=0.00984MPaσ 2=0.00984MPaσ 3=0.366MPa
8.-DIAGRAMA DE FLUJO
INICIO
INGRESO DE DATOS
CONSTANTES : E, f, t
8

VECTORES: L, A, P
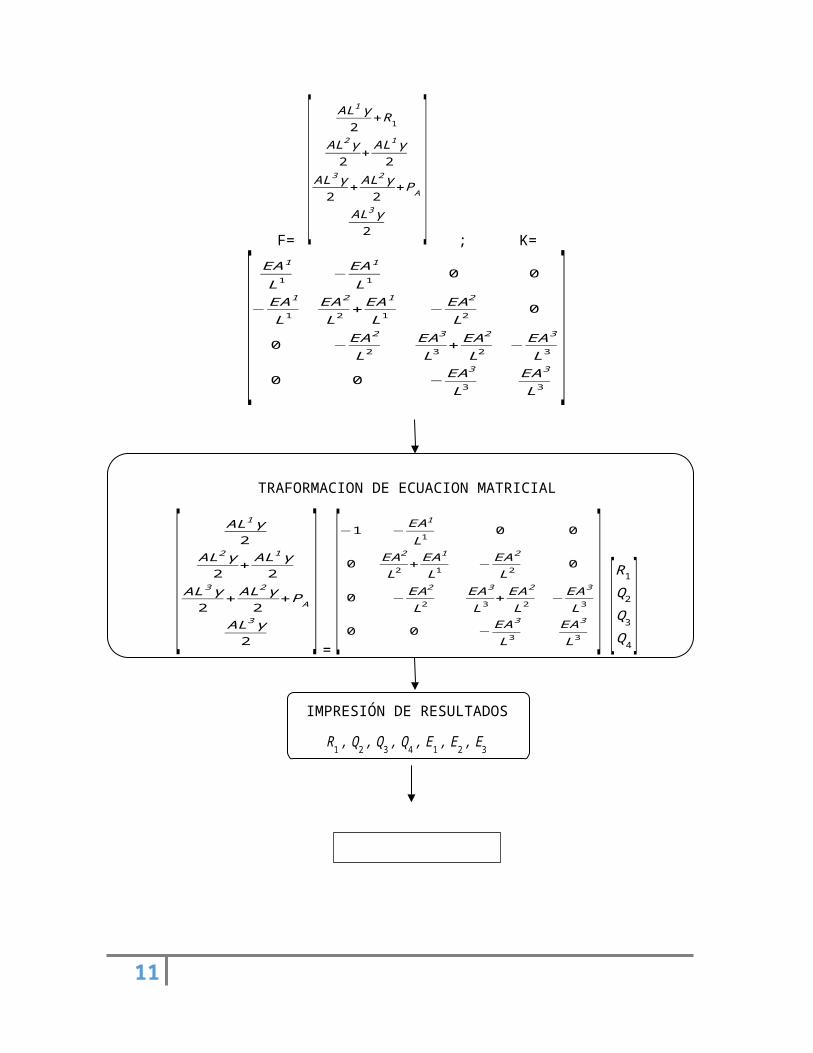
CALCULO DE VECTORES
F=
[AL1γ2
+R1
AL2 γ2 +
AL1 γ2
AL3 γ2
+ AL2 γ2
+PA
AL3 γ2
] ; K=
[EA1
L1−EA1
L10 0
−EA1
L1EA2
L2+ EA
1
L1− EA
2
L20
0 − EA2
L2EA3
L3+EA
2
L2−EA
3
L3
0 0 − EA3
L3EA3
L3]
TRAFORMACION DE ECUACION MATRICIAL
[AL1 γ2
AL2 γ2 +
AL1 γ2
AL3 γ2
+ AL2 γ2
+PA
AL3 γ2
]=
[−1 −EA 1
L10 0
0 EA 2
L2+ EA
1
L1− EA
2
L20
0 − EA2
L2EA3
L3+EA
2
L2−EA
3
L3
0 0 − EA3
L3EA3
L3][R1Q2Q3Q4 ]
IMPRESIÓN DE RESULTADOS
R1 , Q2 , Q3 , Q4 , E1 , E2 , E3
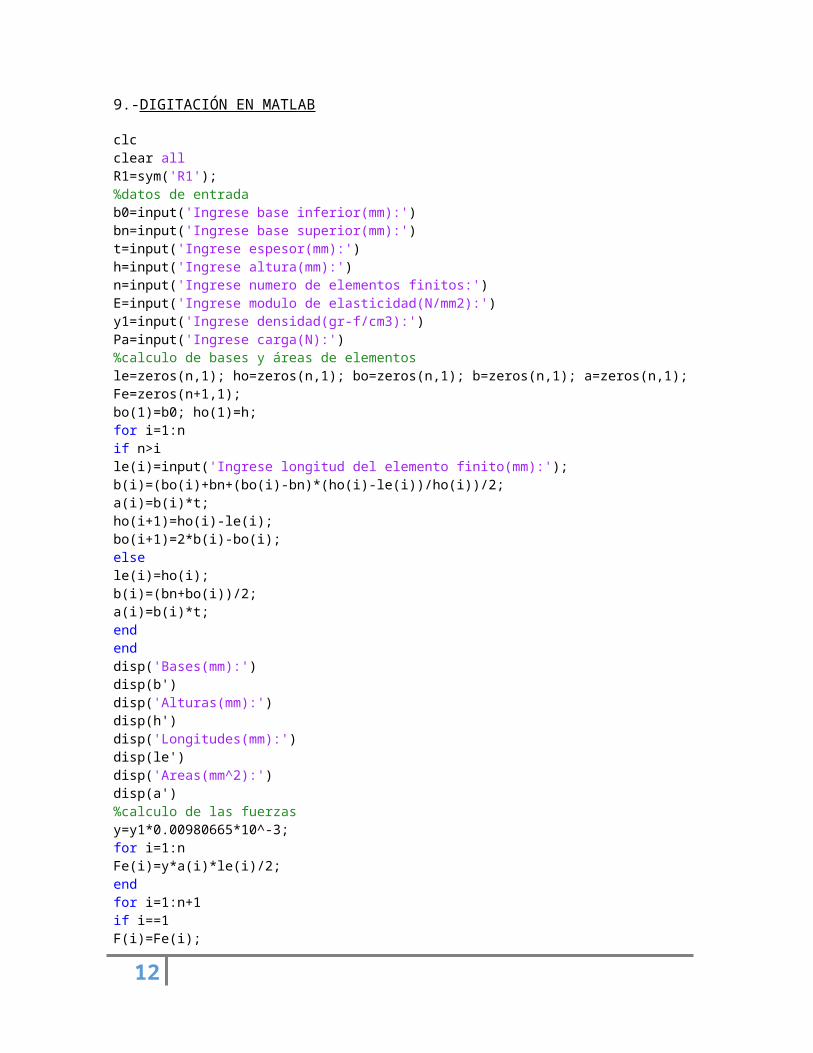
9.-DIGITACIÓN EN MATLAB
clcclear allR1=sym('R1');%datos de entradab0=input('Ingrese base inferior(mm):')
9
FIN
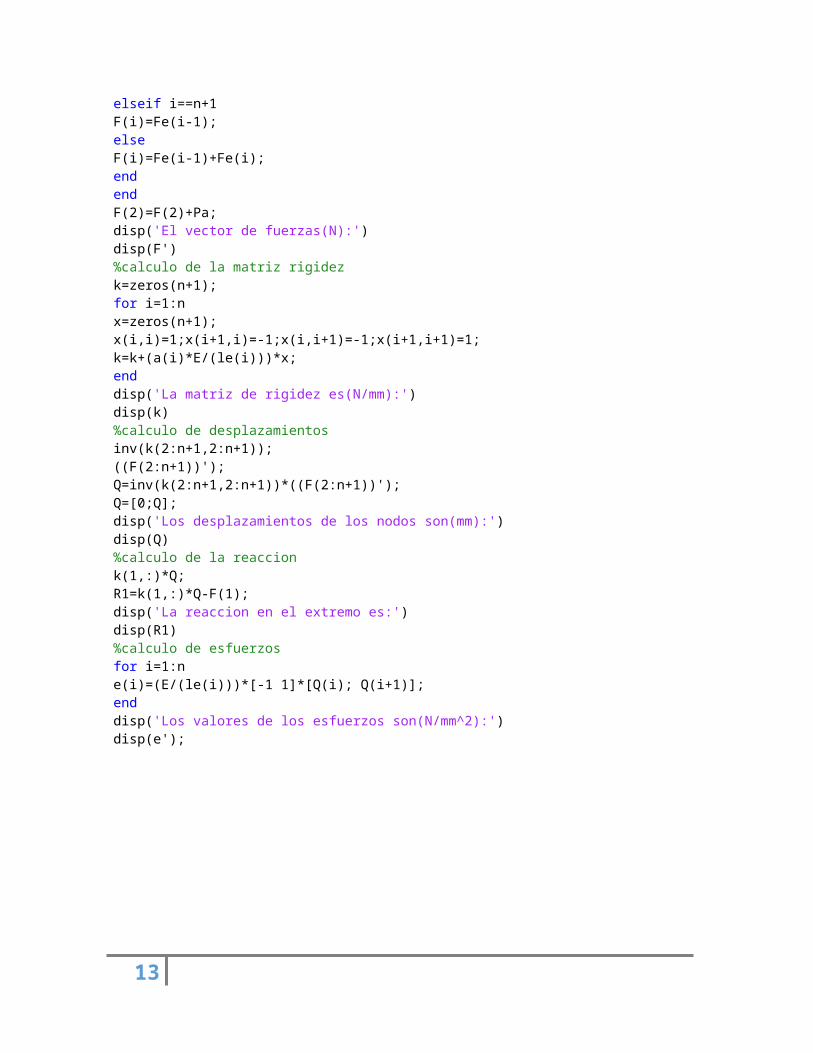
bn=input('Ingrese base superior(mm):')t=input('Ingrese espesor(mm):')h=input('Ingrese altura(mm):')n=input('Ingrese numero de elementos finitos:')E=input('Ingrese modulo de elasticidad(N/mm2):')y1=input('Ingrese densidad(gr-f/cm3):')Pa=input('Ingrese carga(N):')%calculo de bases y áreas de elementosle=zeros(n,1); ho=zeros(n,1); bo=zeros(n,1); b=zeros(n,1); a=zeros(n,1); Fe=zeros(n+1,1);bo(1)=b0; ho(1)=h;for i=1:nif n>ile(i)=input('Ingrese longitud del elemento finito(mm):');b(i)=(bo(i)+bn+(bo(i)-bn)*(ho(i)-le(i))/ho(i))/2;a(i)=b(i)*t;ho(i+1)=ho(i)-le(i);bo(i+1)=2*b(i)-bo(i);elsele(i)=ho(i);b(i)=(bn+bo(i))/2;a(i)=b(i)*t;endenddisp('Bases(mm):')disp(b')disp('Alturas(mm):')disp(h')disp('Longitudes(mm):')disp(le')disp('Areas(mm^2):')disp(a')%calculo de las fuerzasy=y1*0.00980665*10^-3;for i=1:nFe(i)=y*a(i)*le(i)/2;endfor i=1:n+1if i==1F(i)=Fe(i);elseif i==n+1F(i)=Fe(i-1);elseF(i)=Fe(i-1)+Fe(i);endendF(2)=F(2)+Pa;disp('El vector de fuerzas(N):')disp(F')%calculo de la matriz rigidezk=zeros(n+1);for i=1:nx=zeros(n+1);x(i,i)=1;x(i+1,i)=-1;x(i,i+1)=-1;x(i+1,i+1)=1;k=k+(a(i)*E/(le(i)))*x;enddisp('La matriz de rigidez es(N/mm):')
10
disp(k)%calculo de desplazamientosinv(k(2:n+1,2:n+1));((F(2:n+1))');Q=inv(k(2:n+1,2:n+1))*((F(2:n+1))');Q=[0;Q];disp('Los desplazamientos de los nodos son(mm):')disp(Q)%calculo de la reaccionk(1,:)*Q;R1=k(1,:)*Q-F(1);disp('La reaccion en el extremo es:')disp(R1)%calculo de esfuerzosfor i=1:ne(i)=(E/(le(i)))*[-1 1]*[Q(i); Q(i+1)];enddisp('Los valores de los esfuerzos son(N/mm^2):')disp(e');
10. CONCLUSIONES
11
Se puede apreciar que las deformaciones son realmente pequeñas
(décimas de micras), además todas son hacia abajo que es el sentido
opuesto al asumido como referencia.
Los esfuerzos son positivos, lo que indica esfuerzos de compresión
para nuestro sistema de referencia.
Los esfuerzos calculados son tres positivos, lo que significa que tres son
de tracción, respecto al sistema de referencia elegido.
En el programa hemos usado la format long en vez de la format short
ya que así obtendremos una mayor exactitud.
El uso de MATLAB es muy importante, ya que podemos modelarlo de
forma más sencilla y así poder tener un resultado con mayor exactitud.
La precisión en el resultado con respecto al uso del Matlab es muy alta,
lo que significa que para el cuerpo estudiado el número de elementos
finitos (tres) es suficiente gracias a su geometría simple.
Para otras figuras, la precisión será directamente proporcional al
número de elementos finitos en que se divida, pues entre más se
escojan, menor error en los cálculos.
11. BIBLIOGRAFÍA
12
CHANDRUPATLA, T. “Introducción al Estudio de los Elementos Finitos en
Ingeniería”, Prentice Hall, 1999
ZIENKIEWCTZ, O. “The Finite Element Method”, New Cord, Mec Graw – Hill,
1977.
ZIENKIEWCTZ, O. and MORGAN K. “Finite Elements and Approximation”,
New Cork, Wiley, 1982.
LIVESLEY, R. “Finite Element: An Introduction for Engineers”, Cambridge,
Great Britain, Cambridge University Press, 1983.
13























