Embed Size (px)
Citation preview
Control de articulaciones basado en modelo
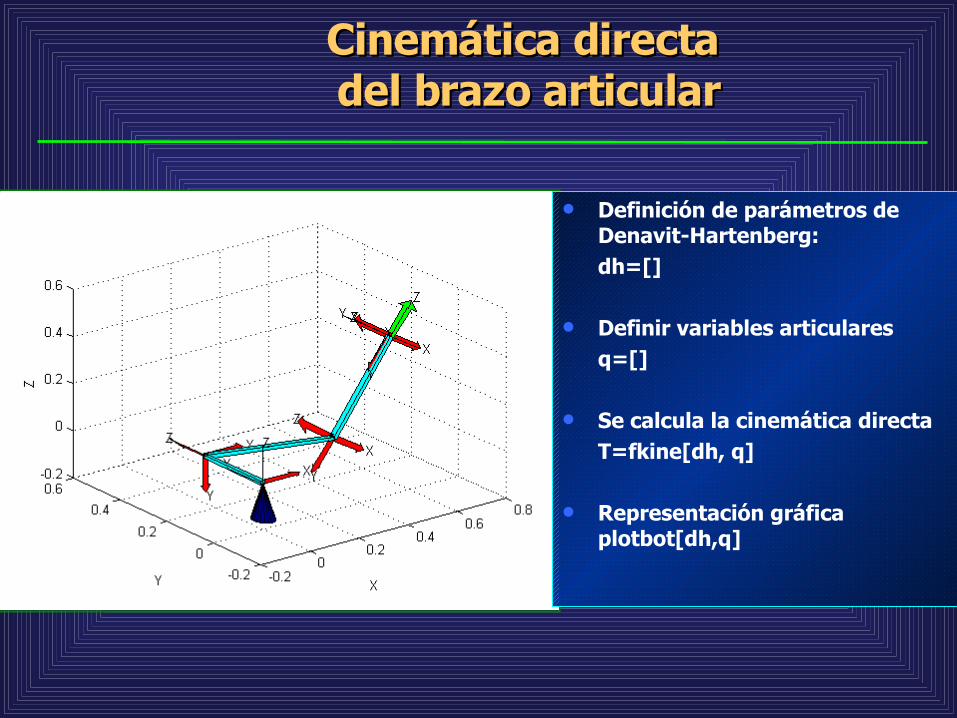
Cinemática directa Cinemática directa del brazo articulardel brazo articular
Definición de parámetros de Denavit-Hartenberg:dh=[]
Definir variables articularesq=[]
Se calcula la cinemática directaT=fkine[dh, q]
Representación gráfica plotbot[dh,q]
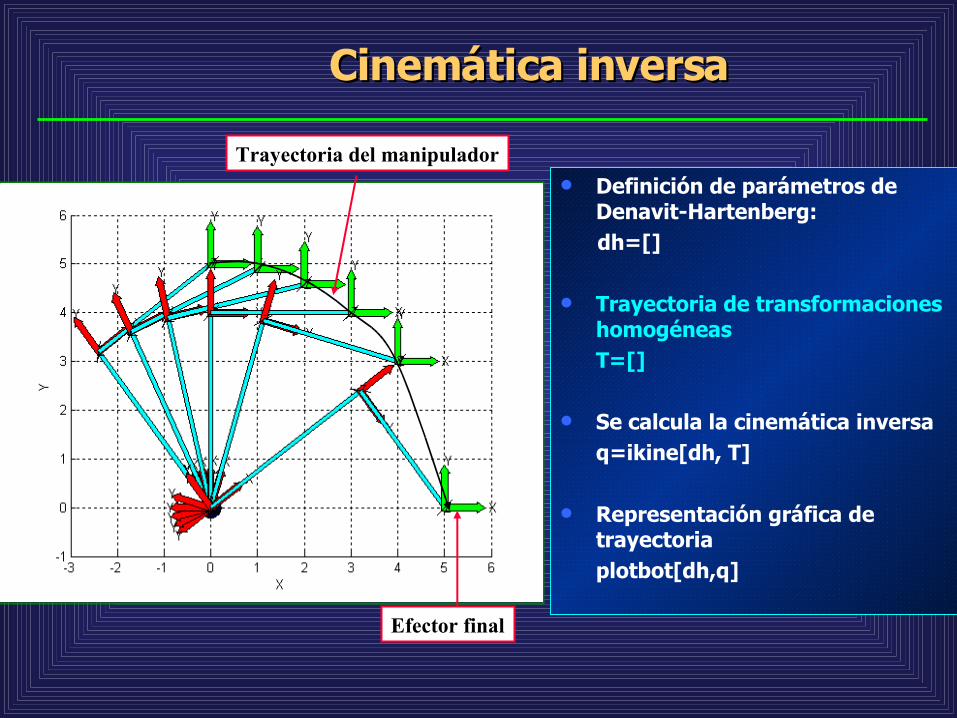
Cinemática inversaCinemática inversa
Trayectoria del manipulador
Efector final
Definición de parámetros de Denavit-Hartenberg:
dh=[]
Trayectoria de transformaciones homogéneasT=[]
Se calcula la cinemática inversaq=ikine[dh, T]
Representación gráfica de trayectoriaplotbot[dh,q]
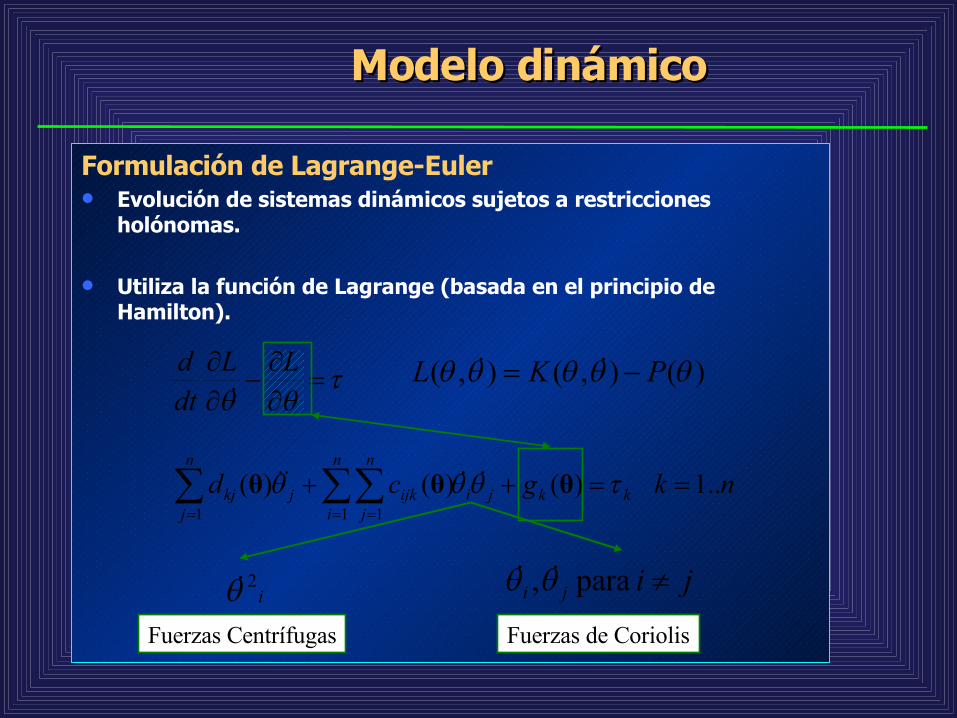
Formulación de Lagrange-Euler Evolución de sistemas dinámicos sujetos a restricciones
holónomas.
Utiliza la función de Lagrange (basada en el principio de Hamilton).
Modelo dinámicoModelo dinámico
)(),(),( PKL
nkgcd kkji
n
i
n
jijkj
n
jkj ..1)()()(
1 11
θθθ
i2 jiji para,
Fuerzas Centrífugas Fuerzas de Coriolis
LL
dtd
Características de un Características de un modelo dinámicomodelo dinámico
Modelo no lineal
Alto grado de acoplamiento en las articulaciones
Sistema variante en el tiempo
Incertidumbres estructuradas: Imprecisión en propiedades del enlace Cargas desconocidas
Incertidumbres no estructuradas: Dinámica no modelada: fricciones, perturbaciones, dinámica de
alta frecuencia
Fricción: Estática Coulomb Viscosa Exponencial Desplazamiento
No importa cuan preciso puede ser los cálculos o la medición, no puede obtenerse un modelo
matemáticamente exacto
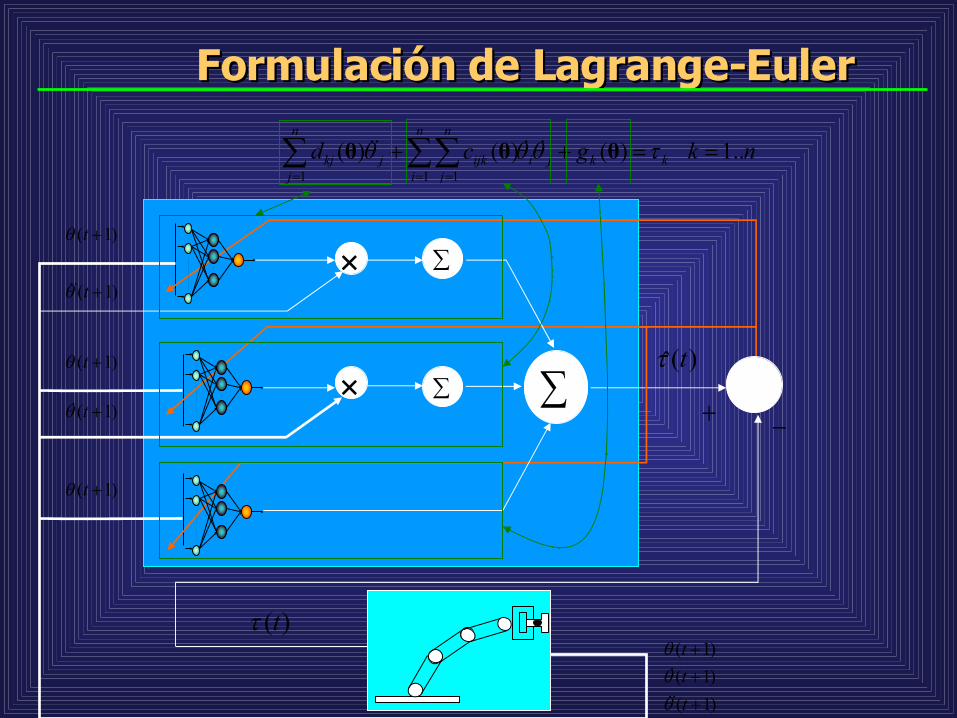
nkgcd kkji
n
i
n
jijkj
n
jkj ..1)()()(
1 11
θθθ
Formulación de Lagrange-EulerFormulación de Lagrange-Euler
)(t
)1(
)1(
)1(
t
t
t
)1( t
)1( t
)1( t
)(ˆ t
)1( t
)1( t
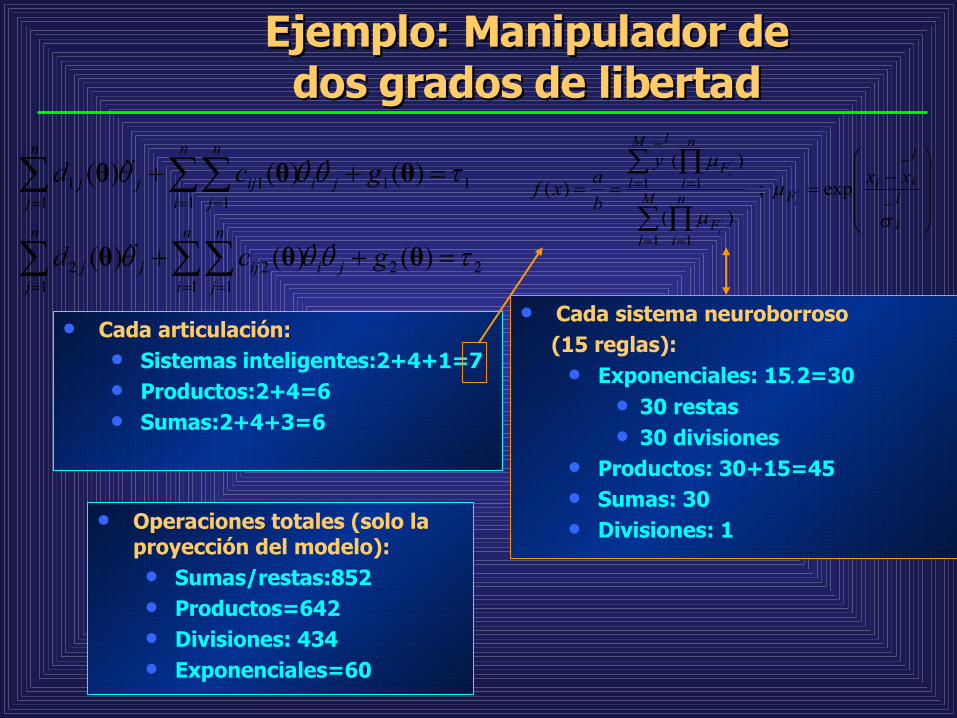
Ejemplo: Manipulador de Ejemplo: Manipulador de dos grados de libertaddos grados de libertad
221 1
21
2
111 1
11
1
)()()(
)()()(
θθθ
θθθ
gcd
gcd
ji
n
i
n
jijj
n
jj
ji
n
i
n
jijj
n
jj
Cada articulación: Sistemas inteligentes:2+4+1=7 Productos:2+4=6 Sumas:2+4+3=6
l
i
l
iiFM
l
n
iF
M
l
n
iF
l
xxy
b
axf
i
i
i
exp ;
)(
)(
)( '
'
'
1 1
1 1
Cada sistema neuroborroso (15 reglas):
Exponenciales: 152=30 30 restas 30 divisiones
Productos: 30+15=45 Sumas: 30 Divisiones: 1
Operaciones totales (solo la proyección del modelo): Sumas/restas:852 Productos=642 Divisiones: 434 Exponenciales=60
]00010000000000000
;000100000000000000[
221
11
lml
lm
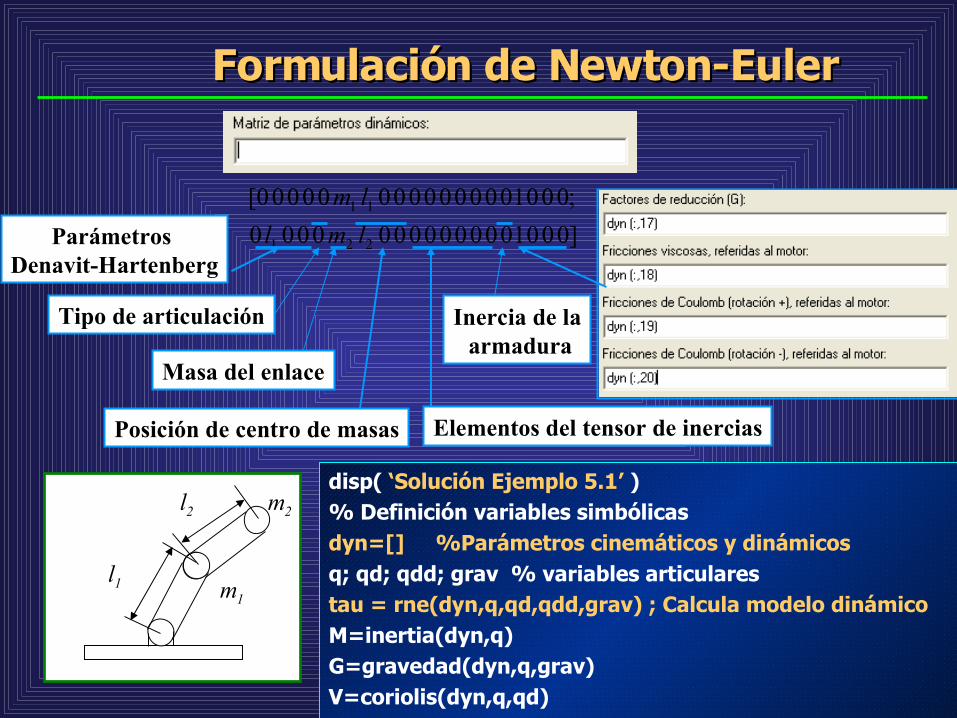
Formulación de Newton-EulerFormulación de Newton-Euler
Parámetros Denavit-Hartenberg
Tipo de articulación
Masa del enlace
Posición de centro de masas Elementos del tensor de inercias
Inercia de la armadura
l1
l2
m1
m2
disp( ‘Solución Ejemplo 5.1’ )% Definición variables simbólicasdyn=[] %Parámetros cinemáticos y dinámicosq; qd; qdd; grav % variables articularestau = rne(dyn,q,qd,qdd,grav) ; Calcula modelo dinámicoM=inertia(dyn,q)G=gravedad(dyn,q,grav)V=coriolis(dyn,q,qd)
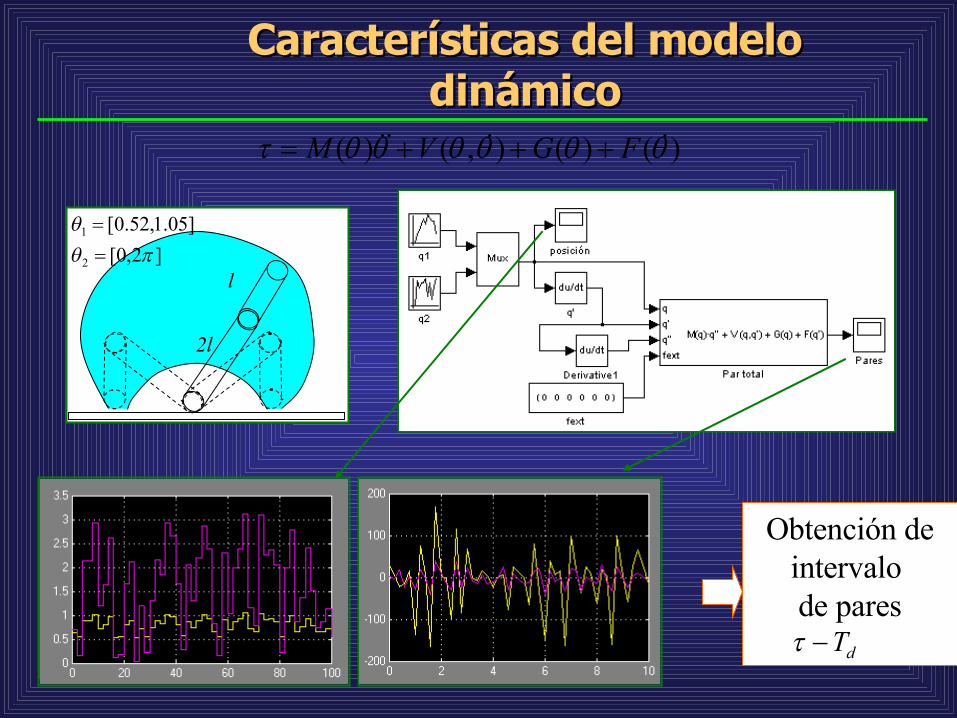
Características del modelo Características del modelo dinámicodinámico
)()(),()( FGVM
2l
l]2,0[
]05.1,52.0[
2
1
Obtención deintervalo de pares
dT

)]()(),()[(1 FGVM
Respuesta dinámica ante Respuesta dinámica ante determinados paresdeterminados pares
Generador de pares
],,[ 321
Robot Real
Sensores],,[ θθθ
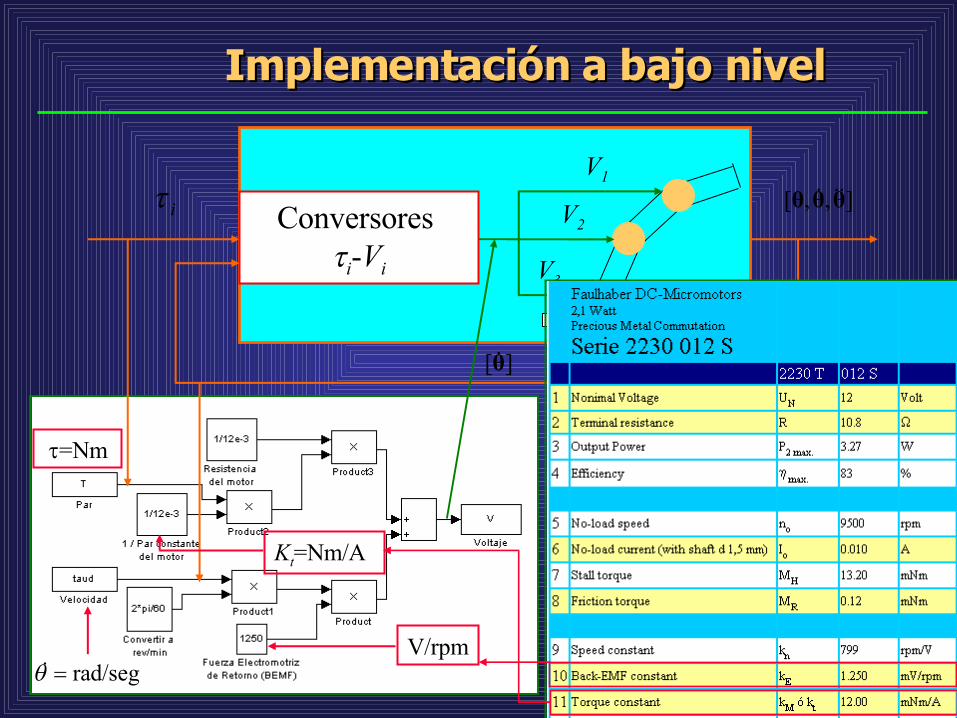
Implementación a bajo nivelImplementación a bajo nivel
i Conversores i-Vi
V1
V2
V3
],,[ θθθ
][θ
=Nm
rad/segV/rpm
Kt=Nm/A
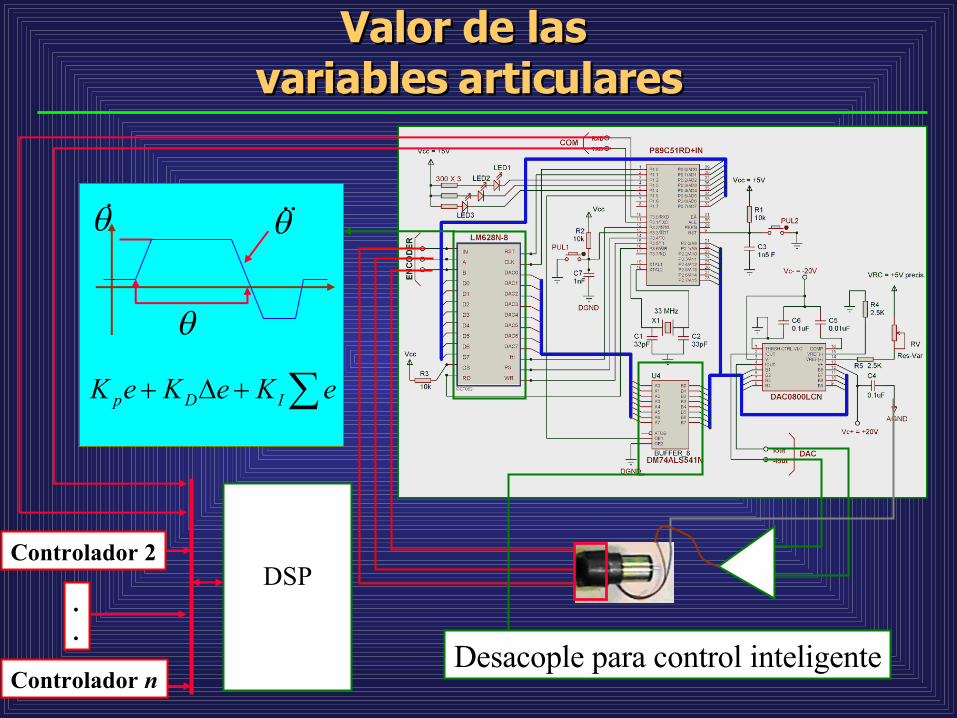
Valor de las Valor de las variables articularesvariables articulares
DSPControlador 2
Controlador n
.
.
eKeKeK IDp
Desacople para control inteligente
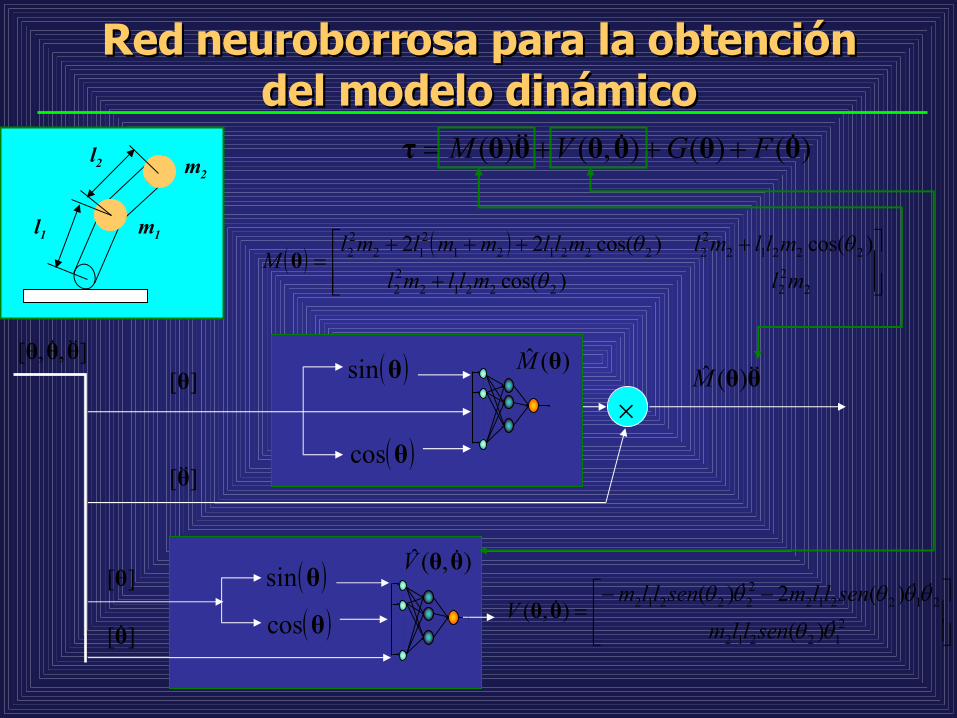
Red neuroborrosa para la obtención Red neuroborrosa para la obtención del modelo dinámicodel modelo dinámico
l1
l2
m1
m2
)()(),()( θθθθθθτ FGVM
][θ
212212
212212222212
)(
)(2)(),(
senllm
senllmsenllmV θθ
][θ θsin
θcos
),(ˆ θθ V
22222212
22
2221222222121
212
22
)cos(
)cos()cos(22
mlmllml
mllmlmllmmlmlM
θ
][θ
][θ
θsin
θcos
)(ˆ θM
θθ )(M̂],,[ θθθ
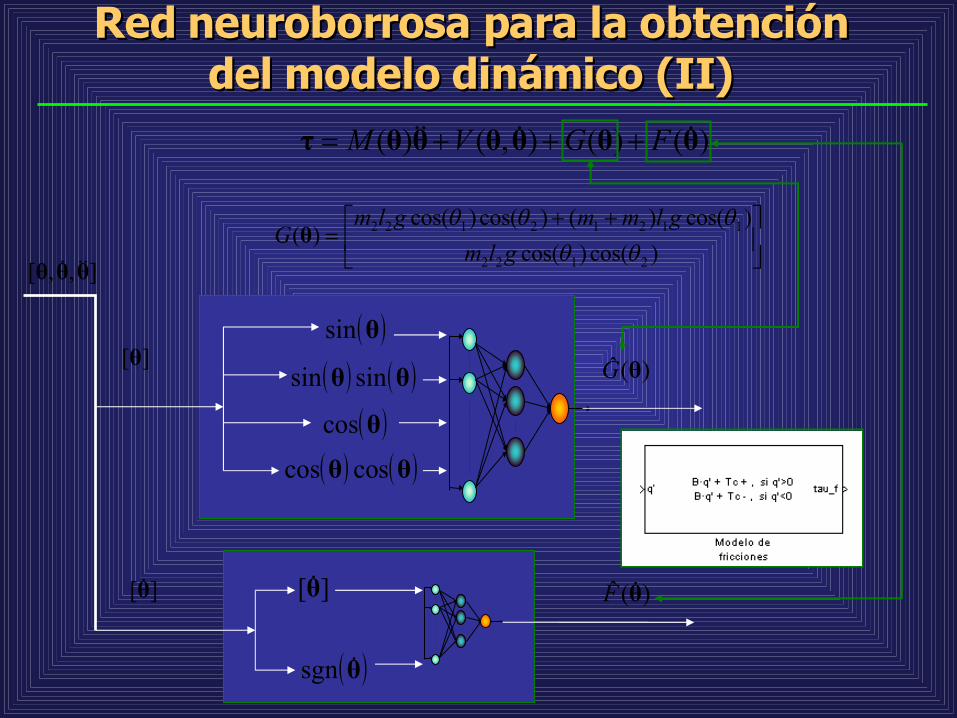
Red neuroborrosa para la obtención Red neuroborrosa para la obtención del modelo dinámico (II)del modelo dinámico (II)
)cos()cos(
)cos()()cos()cos()(
2122
11212122
glm
glmmglmG θ
)()(),()( θθθθθθτ FGVM
],,[ θθθ
][θ )(ˆ θG
θsin
θcos
θθ sinsin
θθ coscos
][θ
θsgn
)(ˆ θF][θ
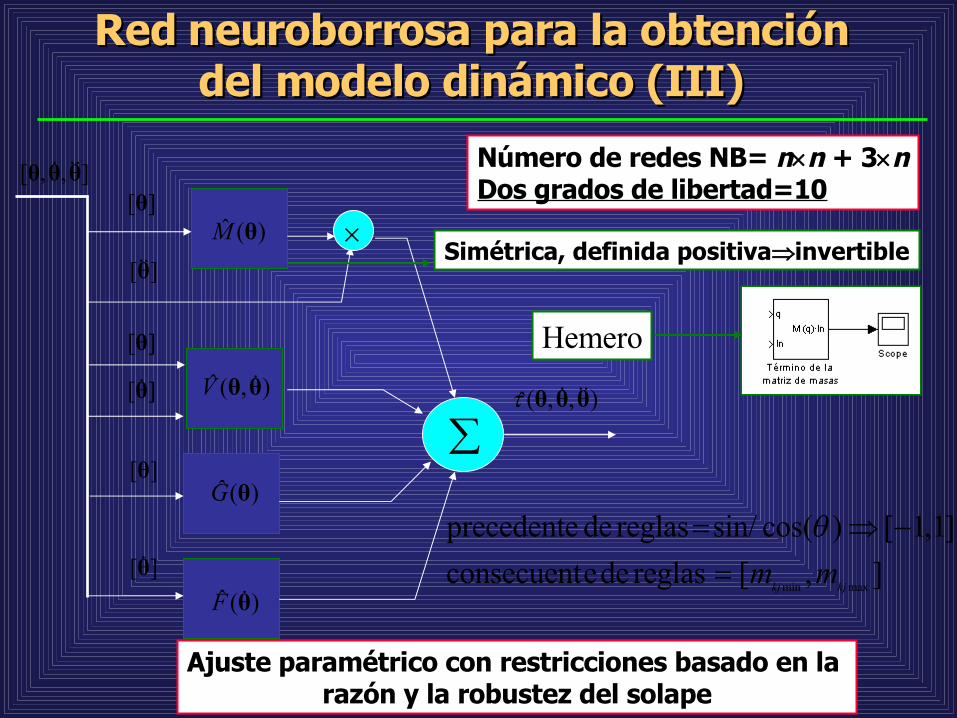
Red neuroborrosa para la obtención Red neuroborrosa para la obtención del modelo dinámico (III)del modelo dinámico (III)
],,[ θθθ
][θ)(ˆ θM
][θ
][θ
][θ ),(ˆ θθ V
][θ)(ˆ θG
)(ˆ θF
][θ
),,(ˆ θθθ
Número de redes NB= nn + 3nDos grados de libertad=10
Simétrica, definida positivainvertible
Hemero
],[reglasdeeconsecuent
]1,1[)cos(sin/reglasdeprecedente
maxmin kjkjmm
Ajuste paramétrico con restricciones basado en la razón y la robustez del solape
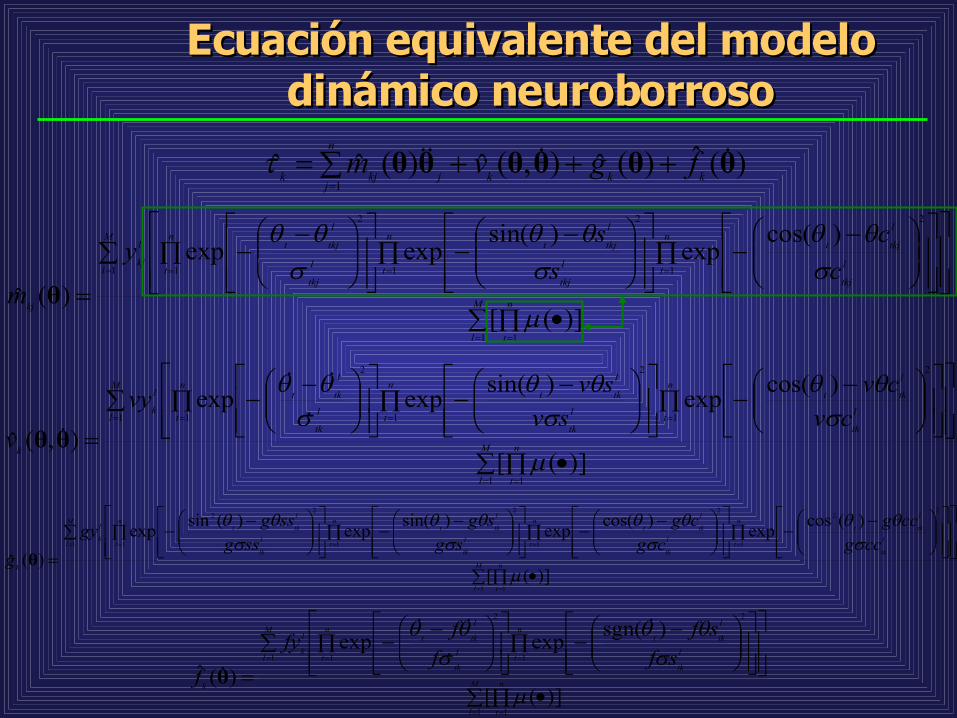
Ecuación equivalente del modelo Ecuación equivalente del modelo dinámico neuroborrosodinámico neuroborroso
M
l
n
t
M
l
n
t
n
t
n
tl
tkj
l
tkjt
l
tkj
l
tkjt
l
tkj
l
tkjtl
kj
kj
c
c
s
sy
m
1 1
1 1 1 1
222
])([
)cos(exp
)sin(expexp
)(ˆ
θ
M
l
n
t
M
l
n
t
n
t
n
tl
tk
l
tkt
l
tk
l
tkt
l
tk
l
tktl
k
k
cvcv
svsv
vy
v
1 1
1 1 1 1
222
])([
)cos(exp
)sin(expexp
),(ˆ
θθ
M
l
n
t
M
l
n
t
n
t
n
tl
tk
l
tktn
tl
tk
l
tkt
l
tk
l
tkt
l
tk
l
tktl
k
k
ccgccg
cgcg
sgsg
ssgssg
gy
g
1 1
1 1 1 1
22
1
2222
])([
)(cosexp
)cos(exp
)sin(exp
)(sinexp
)(ˆ
θ
M
l
n
t
M
l
n
t
n
tl
tk
l
tkt
l
tk
l
tktl
k
k
sfsf
ff
fy
f
1 1
1 1 1
22
])([
)sgn(expexp
)(ˆ
θ
)(ˆ)(ˆ),(ˆ)(ˆˆ1
θθθθθθ kkkj
n
jkjk
fgvm
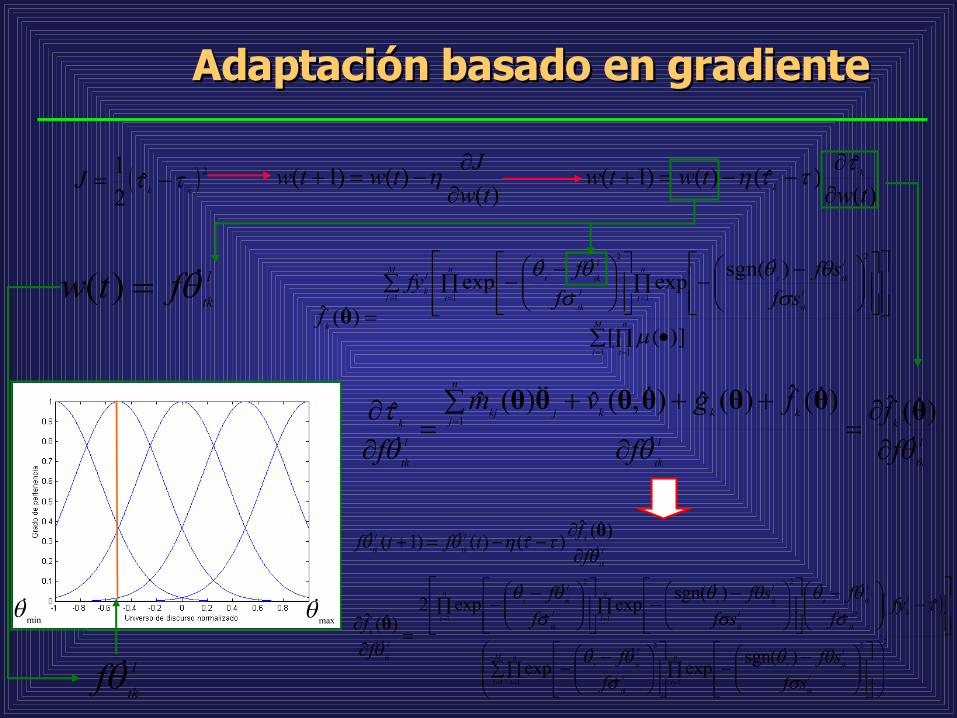
Adaptación basado en gradienteAdaptación basado en gradiente
2
ˆ21
kkJ
min
max
l
tkf
)()()1(
twJ
twtw
)(ˆ)ˆ()()1(tw
twtw k
k
M
l
n
t
M
l
n
t
n
tl
tk
l
tkt
l
tk
l
tktl
k
k
sfsf
ff
fy
f
1 1
1 1 1
22
])([
)sgn(expexp
)(ˆ
θ
l
tkftw )(
l
tk
k
l
tk
kkkj
n
jkj
l
tk
k
ff
f
fgvm
f
)(ˆ)(ˆ)(ˆ),(ˆ)(ˆˆ 1 θθθθθθθ
2
1 1 1
22
1 12
22
)sgn(expexp
ˆ)sgn(
expexp2)(ˆ
)(ˆ)ˆ()()1(
M
l
n
t
n
tl
tk
l
tkt
l
tk
l
tkt
n
t
n
t
l
kl
tk
l
tkt
l
tk
l
tkt
l
tk
l
tkt
l
tk
k
l
tk
kl
tk
l
tk
sfsf
ff
fyf
fsf
sff
f
ff
ff
tftf
θ
θ
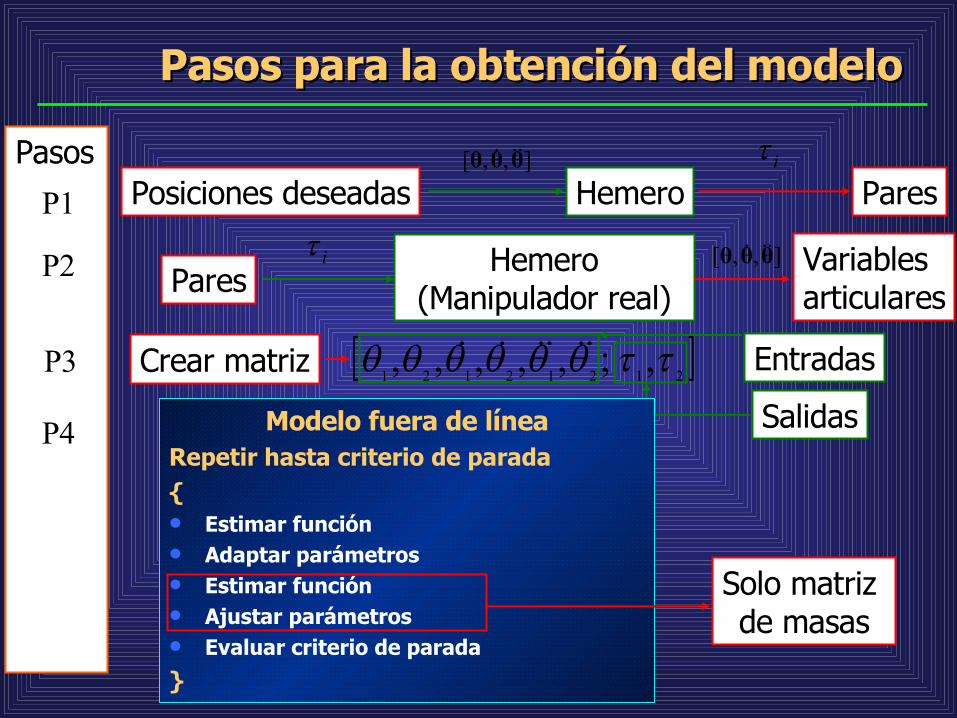
Pasos
P3 Crear matriz 21212121
,;,,,,,
Pasos para la obtención del modeloPasos para la obtención del modelo
Posiciones deseadas],,[ θθθ
Hemero Paresi
P1
P2 Paresi Hemero
(Manipulador real)Variables articulares
],,[ θθθ
Entradas
SalidasP4 Modelo fuera de líneaRepetir hasta criterio de parada{ Estimar función Adaptar parámetros Estimar función Ajustar parámetros Evaluar criterio de parada
}
Solo matriz de masas
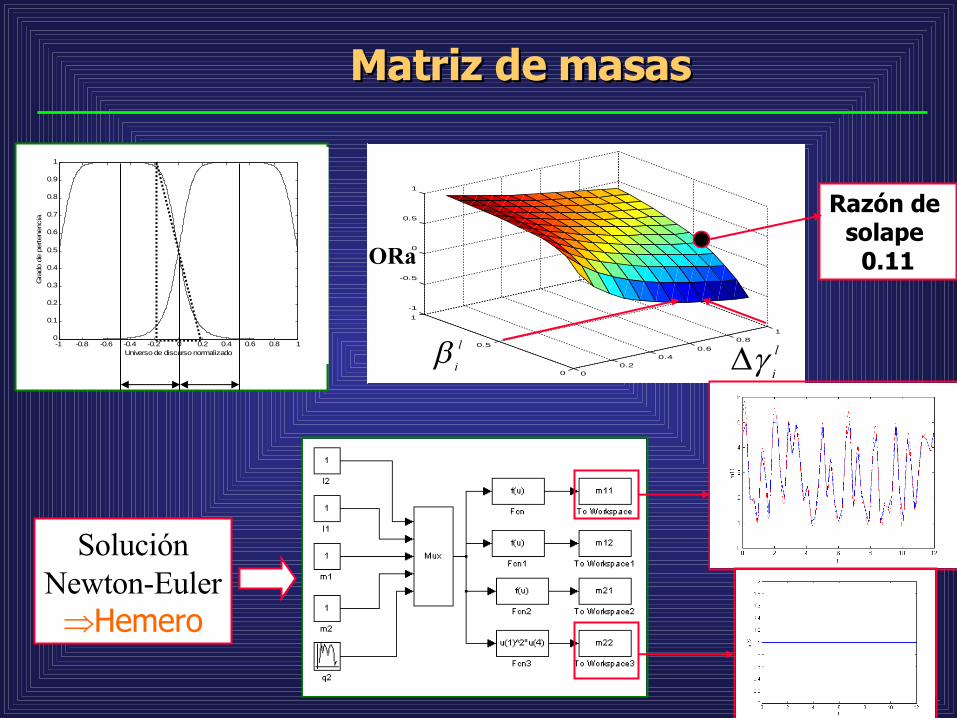
Matriz de masas Matriz de masas
SoluciónNewton-EulerHemero
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Universo de discurso normalizado
Gra
do d
e pe
rten
encia
00.2
0.4
0.6
0.81
0
0.5
1
-1
-0.5
0
0.5
1
l
i l
i
ORa
Razón de solape
0.11
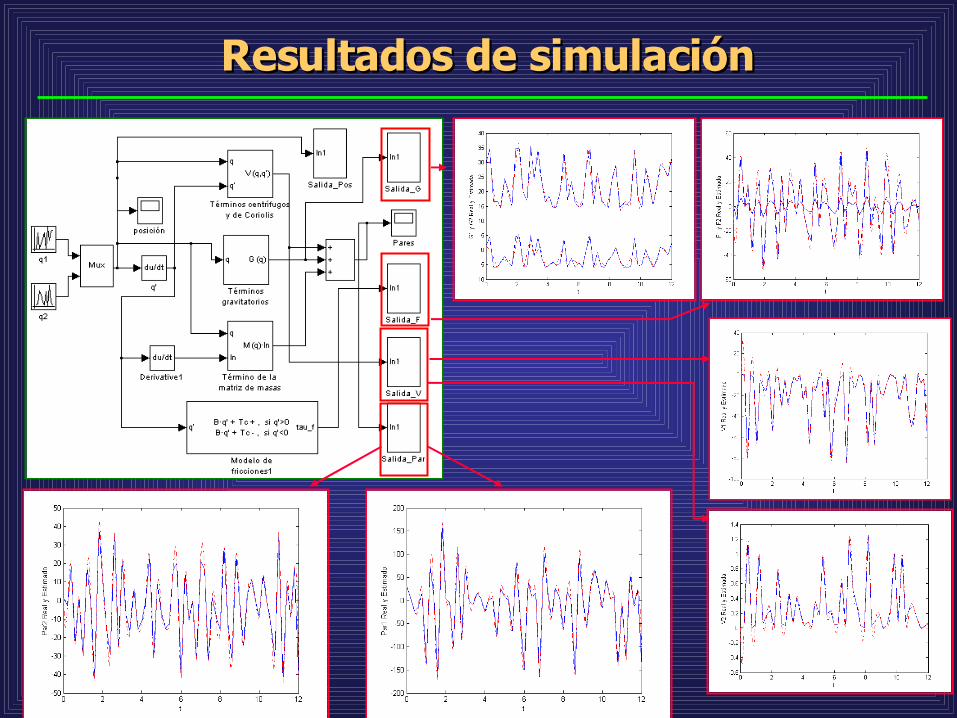
Resultados de simulación Resultados de simulación
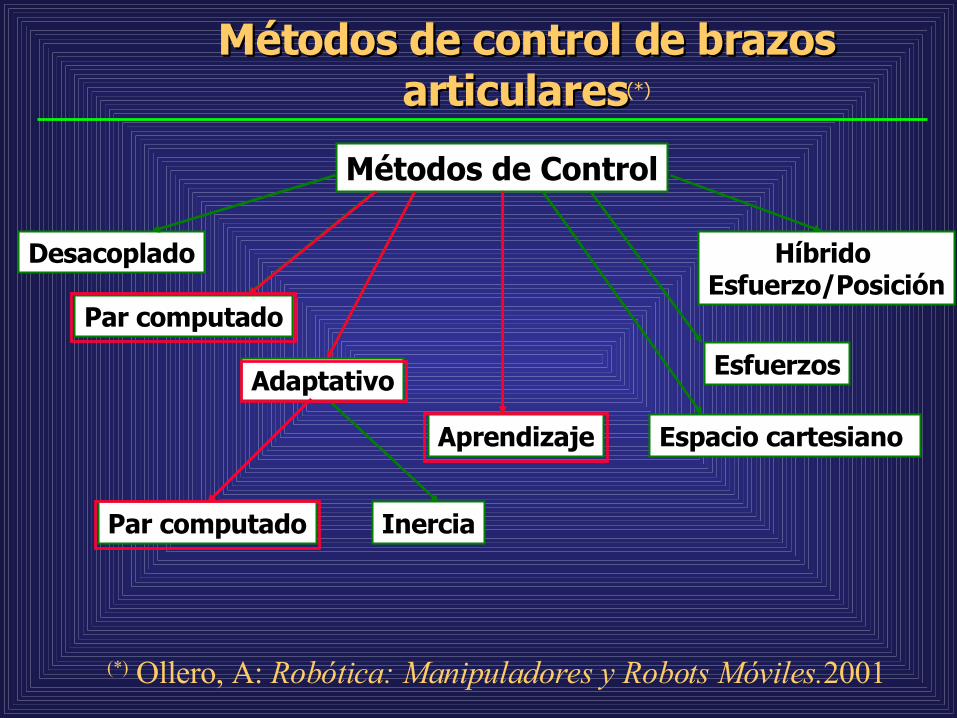
Métodos de control de brazos Métodos de control de brazos articularesarticulares(*)
(*) Ollero, A: Robótica: Manipuladores y Robots Móviles.2001
Desacoplado
Par computado
Aprendizaje Espacio cartesiano
Esfuerzos
Híbrido Esfuerzo/Posición
Métodos de Control
Par computado Inercia
Adaptativo
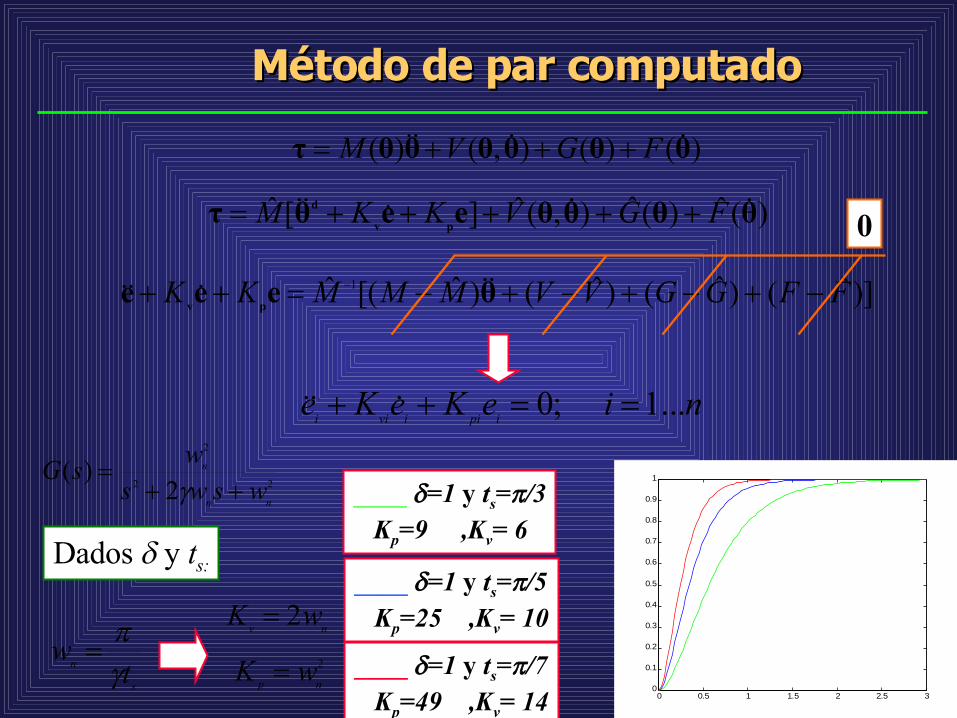
Método de par computadoMétodo de par computado
)()(),()( θθθθθθτ FGVM
)(ˆ)(ˆ),(ˆ][ˆ θθθθeeθτpv
d FGVKKM
)]ˆ()ˆ()ˆ()ˆ[(ˆ 1 FFGGVVMMMKK θeeepv
0
nieKeKeipiivii
...1;0
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
____ =1 y ts=/3 Kp=9 ,Kv= 6
Dados y ts:
22
2
2)(
nn
n
wswsw
sG
s
n tw
2
npwK
nvwK 2
____ =1 y ts=/5 Kp=25 ,Kv= 10
____ =1 y ts=/7 Kp=49 ,Kv= 14
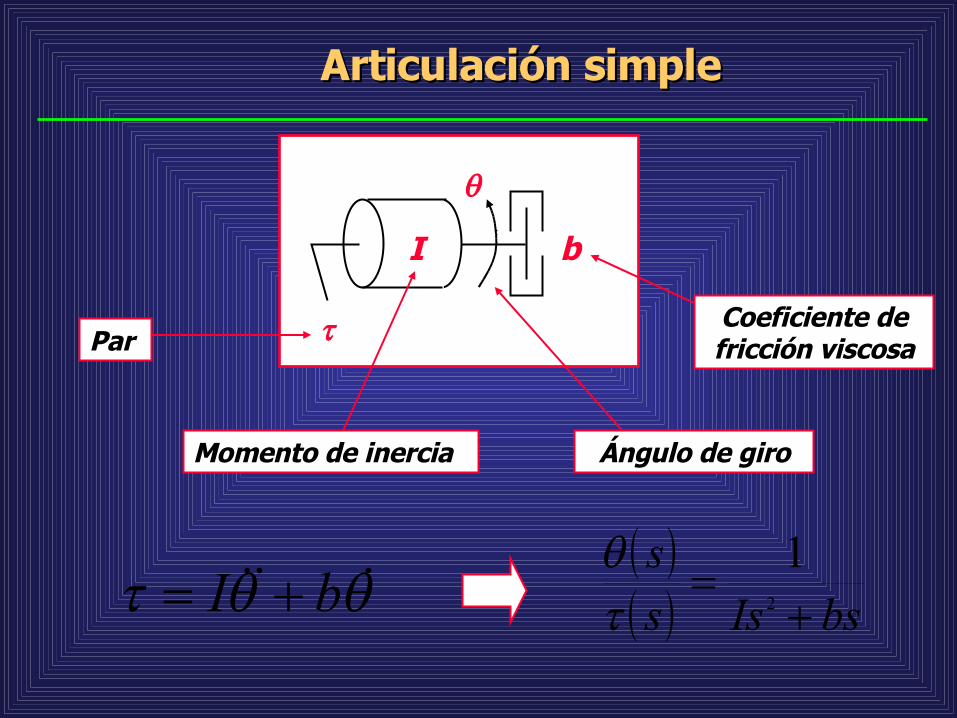
I
b
Momento de inercia
Par Coeficiente de fricción viscosa
Ángulo de giro
bI bsIsss
2
1
Articulación simpleArticulación simple
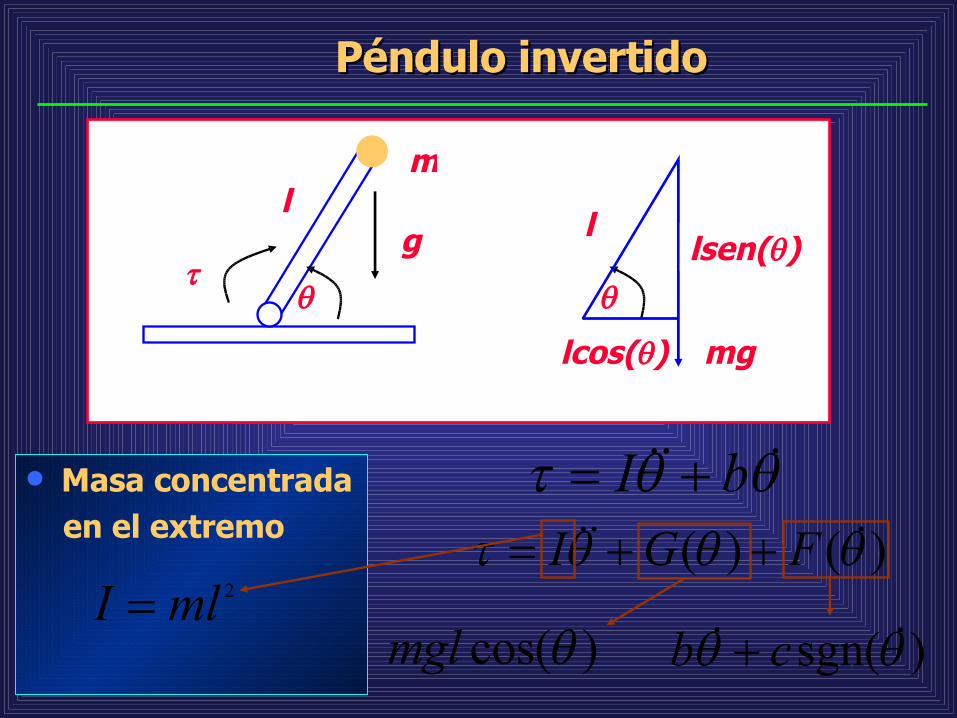
lcos()
Masa concentrada en el extremo
Péndulo invertidoPéndulo invertido
lm
g
mg
lsen()l
bI )()( FGI
2mlI )cos(mgl )sgn( cb
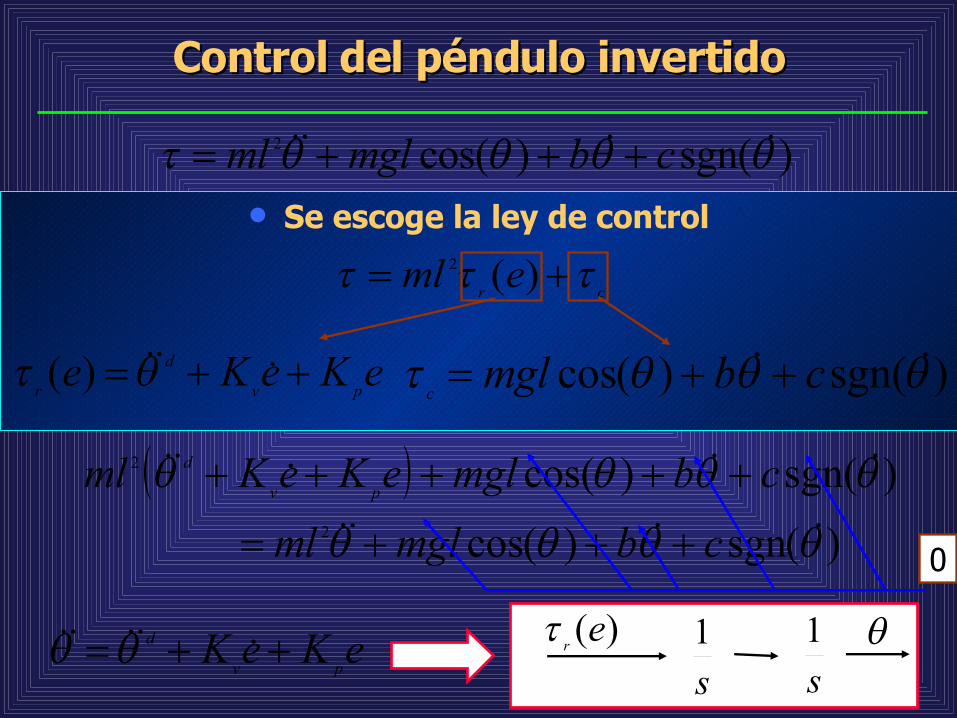
Control del péndulo invertidoControl del péndulo invertido
)sgn()cos(2 cbmglml Se escoge la ley de control
creml )(2
eKeKepv
d
r )( )sgn()cos( cbmgl
c
)sgn()cos(
)sgn()cos(2
2
cbmglml
cbmgleKeKmlpv
d
0
eKeKpv
d )(er
s1
s1
eKeKpv
d 0 eKeKepv
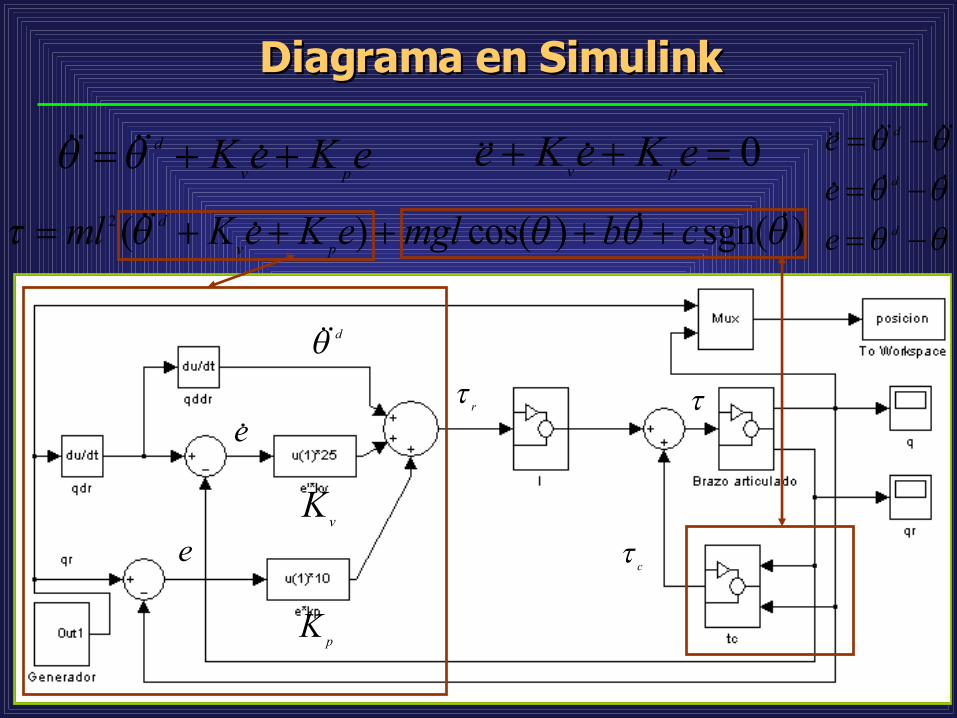
Diagrama en SimulinkDiagrama en Simulink
d
d
d
e
e
e
e
e
d
r
c
vK
pK
)sgn()cos()(2 cbmgleKeKmlpv
d
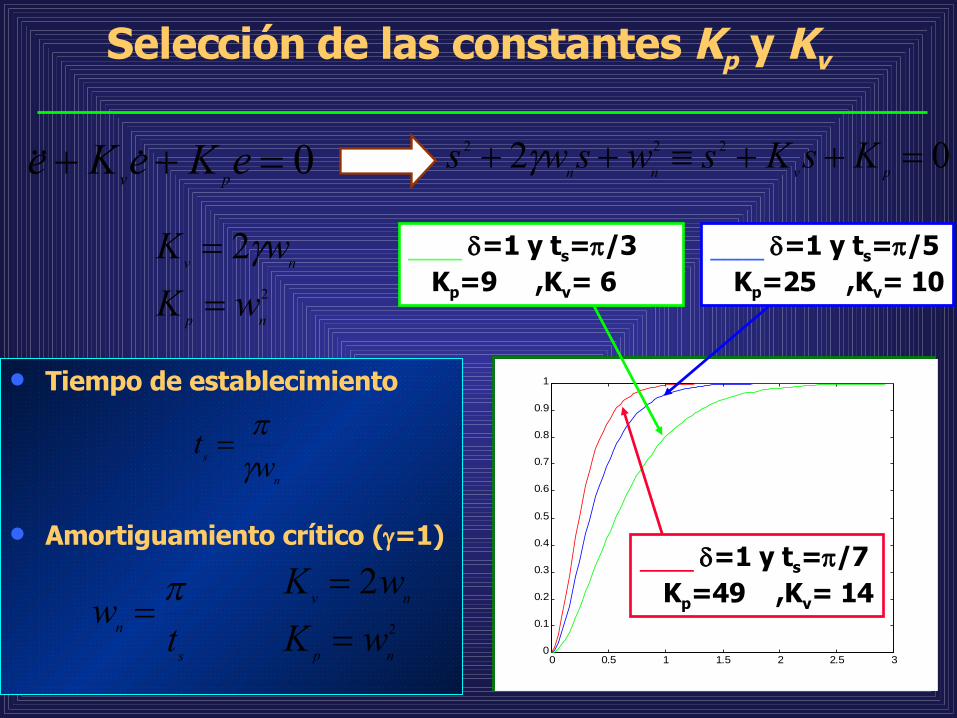
Selección de las constantes Kp y Kv
0 eKeKepv 02 222
pvnnKsKswsws
2
2
np
nv
wK
wK
Tiempo de establecimiento
Amortiguamiento crítico (=1)
2
2
np
nv
wK
wK
n
s wt
s
n tw
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
____ =1 y ts=/7 Kp=49 ,Kv= 14
____ =1 y ts=/3 Kp=9 ,Kv= 6
____ =1 y ts=/5 Kp=25 ,Kv= 10
vK
pK
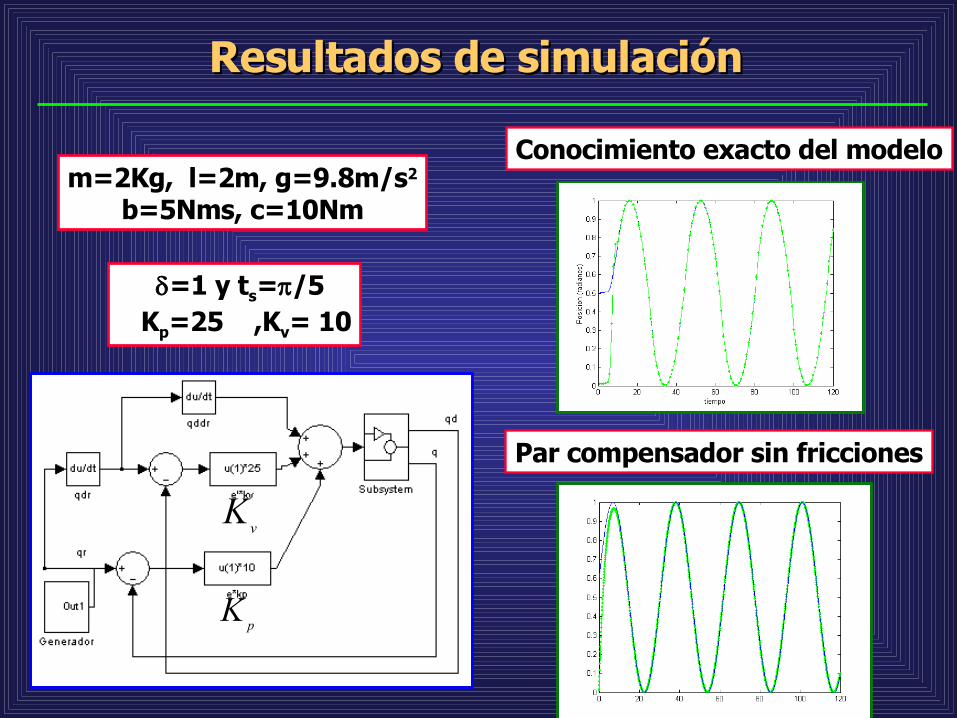
Conocimiento exacto del modelo
=1 y ts=/5 Kp=25 ,Kv= 10
Par compensador sin fricciones
Resultados de simulaciónResultados de simulación
m=2Kg, l=2m, g=9.8m/s2
b=5Nms, c=10Nm
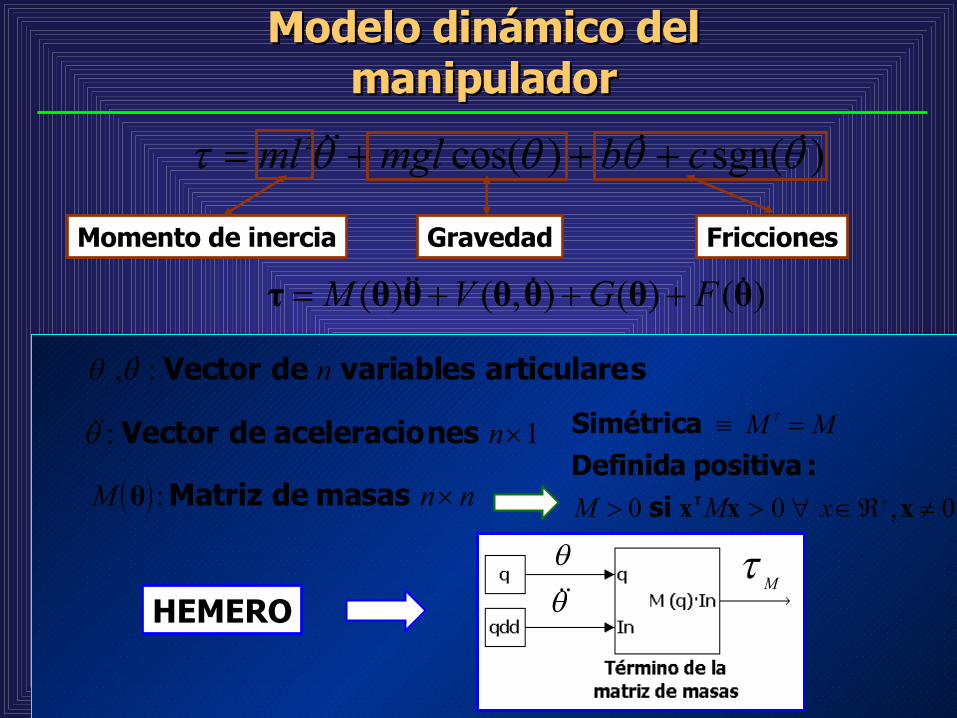
Modelo dinámico del Modelo dinámico del manipuladormanipulador
)sgn()cos(2 cbmglml
Momento de inercia Gravedad Fricciones
1: nnesaceleraciodeVector
sarticularevariablesdeVector n:,
)()(),()( θθθθθθτ FGVM
nnM masasdeMatriz:θ 0,00
xxx n
T
xMM
MM
Tsi:positivaDefinida
Simétrica
M
HEMERO
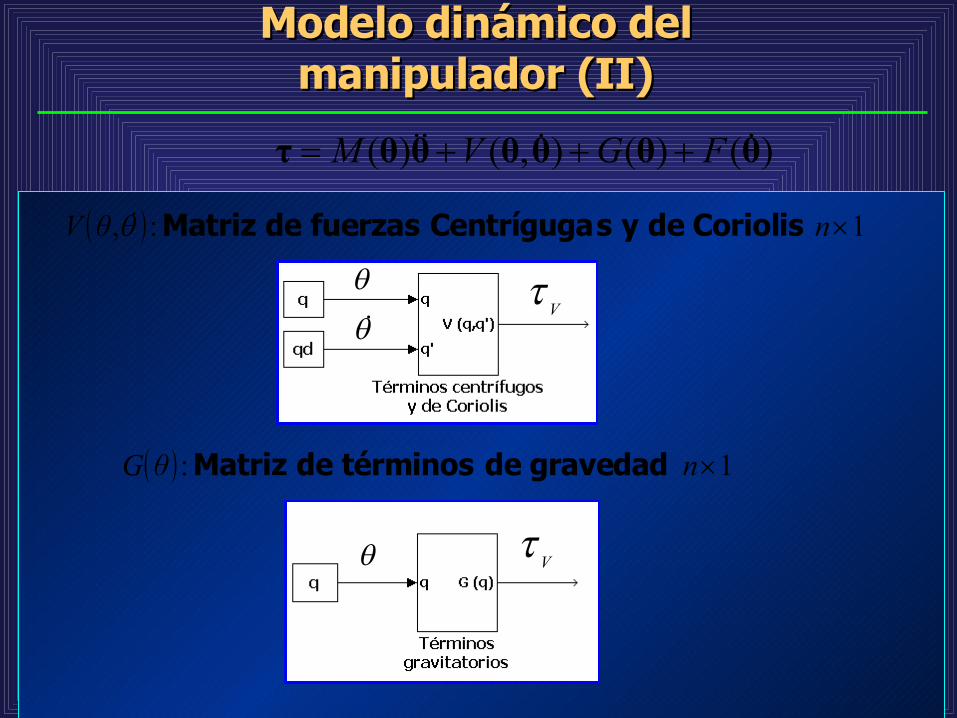
1:, nθV CoriolisdeysCentrígugafuerzasdeMatriz
1: nθG gravedaddetérminosdeMatriz
Modelo dinámico del Modelo dinámico del manipulador (II)manipulador (II)
)()(),()( θθθθθθτ FGVM
V
V
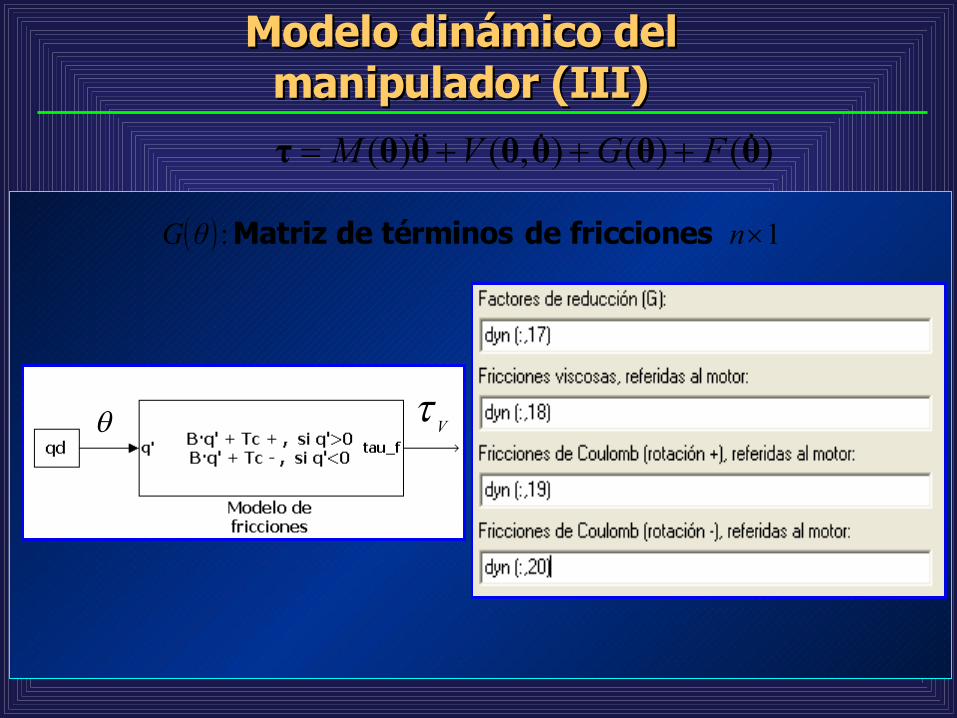
1: nθG friccionesdetérminosdeMatriz
V
)()(),()( θθθθθθτ FGVM
Modelo dinámico del Modelo dinámico del manipulador (III)manipulador (III)
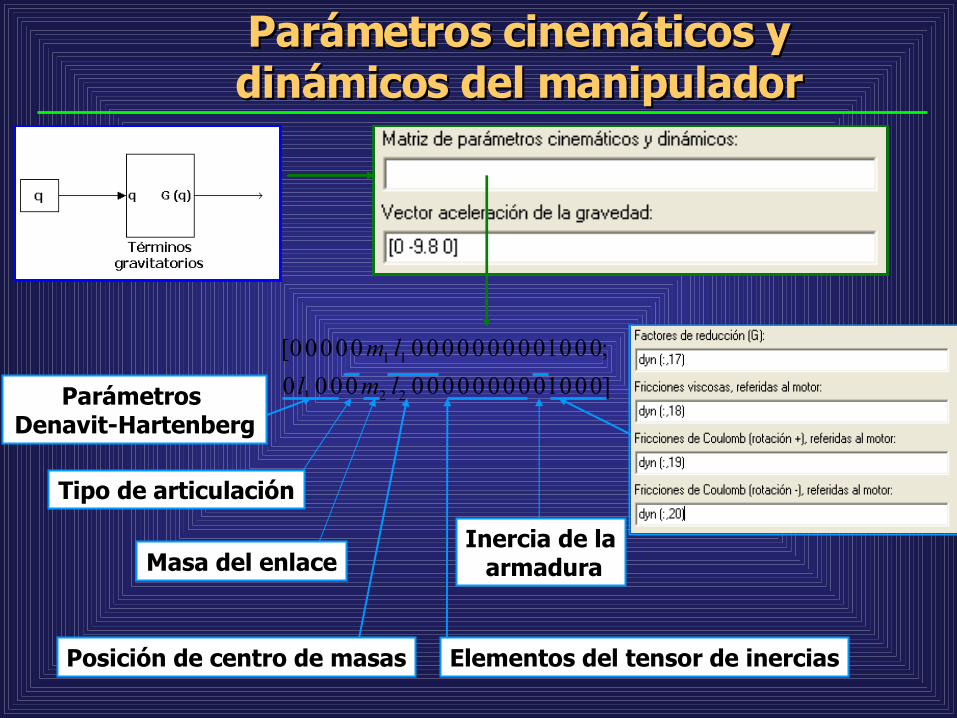
]00010000000000000
;000100000000000000[
221
11
lml
lm
Tipo de articulación
Masa del enlace
Posición de centro de masas Elementos del tensor de inercias
Inercia de la armadura
Parámetros cinemáticos y Parámetros cinemáticos y dinámicos del manipuladordinámicos del manipulador
Parámetros Denavit-Hartenberg
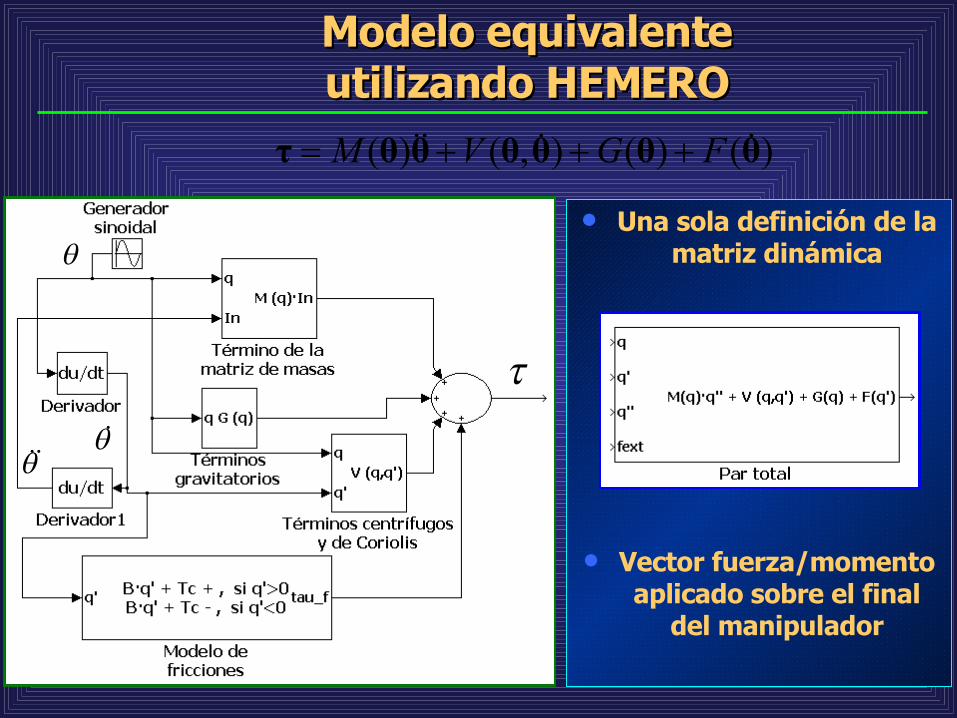
Una sola definición de la matriz dinámica
Vector fuerza/momento aplicado sobre el final
del manipulador
Modelo equivalente Modelo equivalente utilizando HEMEROutilizando HEMERO
)()(),()( θθθθθθτ FGVM
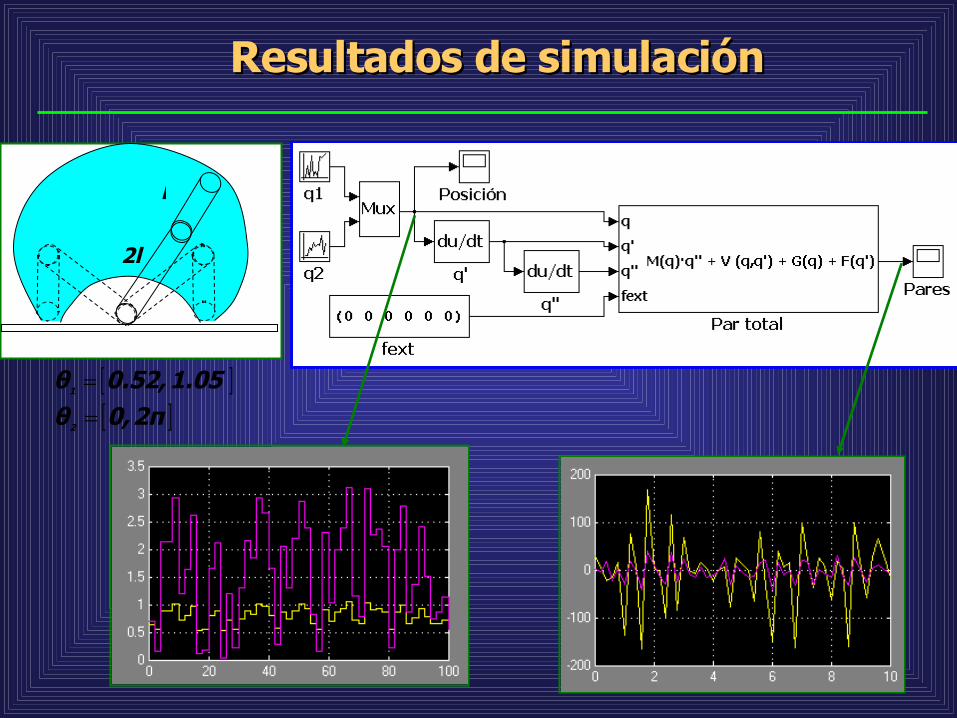
Resultados de simulaciónResultados de simulación
2l
l
2π0,θ
1.050.52,θ
2
1
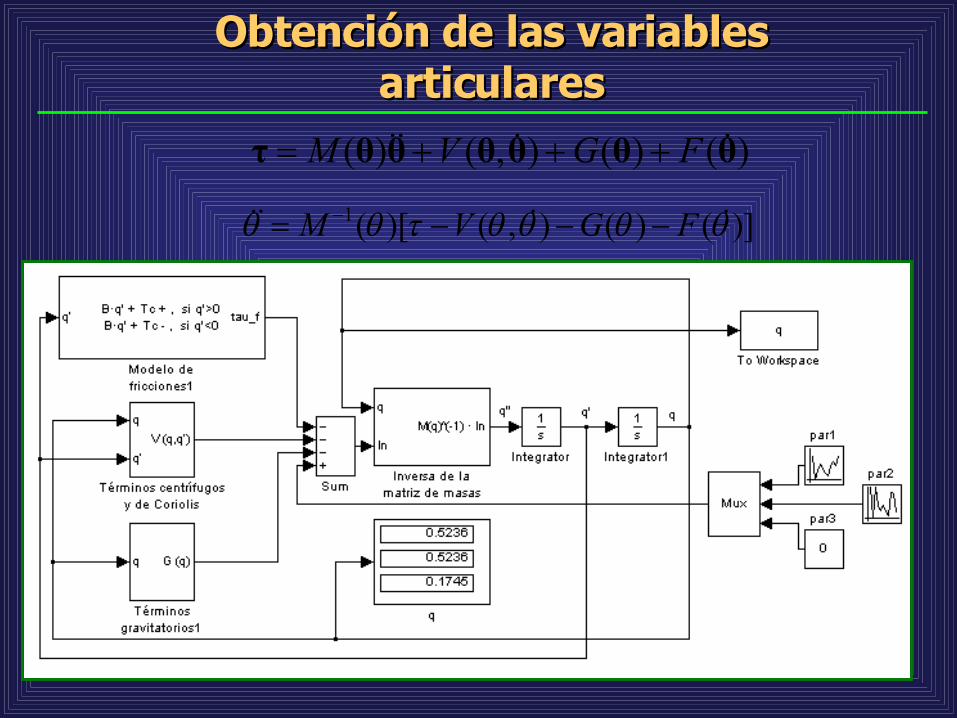
Obtención de las variables Obtención de las variables articularesarticulares
)]()(),()[(1 FGVM
)()(),()( θθθθθθτ FGVM





![Pavimento articulado[1]](https://img.pdfslide.es/doc/110x75/5563d83cd8b42a517c8b49f6/pavimento-articulado1.jpg)























