ROBOTICA
FASE 3. TRABAJO COLABORATIVO 3SOFTWARE DE SIMUALCION
TUTOR:JOAN SEBASTIAN BUSTOS
PRESENTADO POR:CARLOS FERNANDO PAVA AVILAC.C. 1073.322.252GRUPO:
17
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIAEscuela de Ciencias
Bsicas Tecnologa e IngenieraMAYO DE 2015Software COSIMIREn la
actualidad existe un gran nmero de software que permiten simular
celdas robotizadas e interactuar con un proceso de produccin, el
empleamiento de software COSIMIR tiene la ventaja de hacer un
modelamiento, posiciones y programacin.La programacin se realiza
empleando un lenguaje de programacin llamado Mitsubishi Robot
Lenguaje (MRL), el cual es sencillo pero con suficiente capacidad
para realizar tareas con el robot, este lenguaje tiene comando de
control de movimientos, contadores, temporizadores, subrutinas,
bucles e incorpora seales de inputs y outputs.Software de
SimulacinLa industria mundial de robots den las diversas
aplicaciones, tiene una gran variedad de modelos y sistemas
robotizados, como existen una gran variedad de empresas que lo
proveen. Estas empresas tiene a su disposicin software de
mantenimiento que les permite simular dentro de una planta de
produccin automatizada, para facilitar de esta manera la terea en
la toma de decisiones y elegir o no la adecuacin o creacin de un
sistema robotizado.El software COSIMIR es el software de
programacin que permite realizar programas de secuencias y definir
posiciones, para ms tarde poder compilarlo y guardarlo via RS-232
en el robot.COSIMIR posee una amigable interface de diseo y
programacin que permite un fcil manejo. Asimismo, cuenta con una
librera de elementos que contienen modelos de robots, pinzas,
herramientas, alimentadores neumticos, sensores, PLCs, etc.Estos
objetos poseen propiedades que pueden ser fcilmente modificadas
algunas de estas propiedades son la dimensin del objeto, posicin
que va a tener el objeto dentro del entorno de trabajo y color del
objeto. Este software permite almacenar hasta un mximo de 999
posiciones. Para grabar posiciones el software dispone de un panel
de operacin llamado Jog Operation, el cual permite mover cada uno
de los grados de libertad del robot y tambin variar su velocidad de
desplazamiento.El software solo permite simular a travs de un
programa, la correcta secuencia que realiza el robot. No se puede
comunicar con el robot fsicamente, pero ello se requiere de otro
software, con el que no solamente se logre simular una aplicacin
robotizada, sino que tambin pueda descargar un programa y
posiciones al controlador del robot para que pueda
operar.ProgramacinLos programas de control de robots Mitsubishi se
registran sobre todo en el formato MB4 o LMR archivos que se abren
por separado para escribir el programa (en el caso del nuevo
programa de la ventana est vaca). Los programas de control de otros
robots pueden ser grabados en el formato de IRL archivos. El
archivo de programa de cada robot se abre en una ventana
diferente.Nmero de la fila y el comando del lenguaje de
programacin, por ejemplo, 10 MOV P1' Robot mueve a la posicin P1.
En el ejemplo dado el nmero de la fila es 10 y el comando con la
posicin MOV P1. Al final de la fila, se aade un comentario acerca
de su funcionamiento. La eleccin de algunos comandos desde all es
posible entrar utilizado principalmente comandos. El significado de
los comandos se describe en la seccin MELFA Bsico IV comandos.
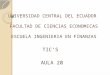
Practica de COSIMIRPrimeros pasos con COSIMIRInterfaz de
usuario
Tipos de ventanas:La siguiente lista muestra los tipos ms
importantes de ventanas que aparecen en COSIMIR.Workcell
WindowsMuestra una interfaz grfica que visualiza una vista de la
celda de trabajo. Es sensible a los comando de zoom y pueden
abrirse varias instancias desde el comando New en el View Menu
Joint CoordinatesEsta ventana muestra las coordenadas
articulares del robot. En grados para las articulaciones
rotacionales y en mm para las prismticas. Es sensible a un doble
clic del raton para dar valores a estas coordenadas.
World CoordinatesEsta ventana muestra la posicin y orientacin
del extremo del robot, adems de informacin sobre la configuracin
del robot. Se puede abrir con shift + f7 o bien desde Extras/robot
position men.
Teach-inEsta ventana permite realizar operaciones de jog sobres
diferentes sistemas de referencia. Tambin permite especificar la
velocidad de jog, la workcel Windows es sensible a los cambios
realizados en esta ventana.
El botn Current Position->Post.list permite ir creando una
lista de posiciones validas del robot siguiendo un mtodo de
programacin manual.Esta ventana se abre al presionar f8, o bien
desde Show World Coordinates desde el men Extras/Robot
Position.
Inputs / OutputsEsta ventana muestra el estado de las entradas y
salidas simuladas en el controlador del robot. Cuando una entra se
muestra entre corchetes [] indica que esta conectada a una salida.
Cuando se muestra a una salida. Cuando se muestra entre corchetes
angulares indica que se encuentra forzada. Se puede acceder a esta
ventan mediante f9/ctrl +f9.
Controler SelectionMuestra el estado de los distintos
controladores existentes en la celda. Se accede desde el comando
Controller Selection del men Excute.
Robot programEsta ventana permite la edicin de los programas de
alto nivel para la programacin del robot. En funcin del compilador
instalado con le software, este ser capaz de interpretar comando
escritos en IRL, MOVEMASTER, MELFA III, MELFAIV, RAPID V+, etc.
Position ListEsta ventana, tanto en su versin Position List como
en MRL Position List, almacena informacin sobre las posiciones del
robot y sus configuraciones, siendo muy til en el proceso de
generacin de un programa.
Model ExplorerEsta ventana muestra el rbol que contiene la
informacin de los objetos que exiten en la celda simulada. Permite
establecer relaciones entre las entradas/salidas, adems de acceder
a las propiedades de cada objeto; posicin, tamao, color, textura,
lmites mecnicos
Model LibraryEsta ventana muestra la librera de robots,
sensores, mecanismos y objetos existentes a partir de las cuales le
genera la celda a simular.La forma ms comoda de acceder a esta
librera es a partir del botn de la barra de herramientas.
COSIMIRVENTAJASEntorno de programacin y de simulacin para clulas
robotizadas predefinidas correspondientes a aplicaciones
industriales tpicas.Tutorial on-line amplio contenido de multimedia
sobre robtica.Permite incluir la opcin de sistema
remoto.Sincronizacin con de la simulaciones que permite al profesor
ensear en tiempo real a todos los alumnos conectados para el caso
de COSIMIR EDUCATION.
DESVENTAJASEl estar programado para hacer las posiciones
programadas, si un objeto esta fuera de las coordenadas donde
operara el robot, este no ser abordado por el robot. Por tanto el
robot deber ser reiniciado para que lo recoja.REFERENCIAS
BIBLIOGRAFICAS MARTIN, RODRIGUEZ LUIS, CORPORACION UNIVERSITARIA
MINUTO DE DIOS, TRABAJO DE GRADO, TUTORIAL BRAZO ROBOT, 19 de julio
de
2011http://repository.uniminuto.edu:8080/jspui/bitstream/10656/1186/1/TTE_RodriguezMartinLuis_2011.pdf
ING E.Freund, Institure of Robotics Research, Dortmund,Germany
Mitsubishi Electric Europe
http://www.oamk.fi/~eeroko/Opetus/Tuotantoautomaatio/Robotiikka/Cosimir-StartManual.pdf
Velasques Costa Jose Antonio. Revista de la facultad de ingenieria
industrial, (enero de 2009), Software para el modelamiento,
simulacin y programacin de aplicaciones robotizadas)
http://sisbib.unmsm.edu.pe/bibvirtual/publicaciones/indata/v12_n1/a05.pdf