Embed Size (px)
Citation preview
7/24/2019 Tarea 1-Mecanismos
http://slidepdf.com/reader/full/tarea-1-mecanismos 1/2
MECANISMOSSÁNCHEZ GÓMEZ JORGE LUIS
Cuestionario
1. Expi!a !u" es a #un!i$n %e a e!ua!i$n %e Grue&er.R= Conocer el GDL de cualquier ensamble de eslabones. Para luego
determinar, si se trata de un mecanismo o una estructura ó una
estructura precargada.
'. (" a %e)ni!i$n %e Gra%os %e Li&erta%R= Se defne como el número de coordenadas independientes
requeridas para defnir la posición orientación de un ob!eto.
*. (" a %e)ni!i$n %e esa&$n
R= "s un cuerpo r#gido que posee al menos $ nodos.+. (" a %e)ni!i$n %e ,e!anis,o %e + &arrasR= "s una cadena cinem%tica cerrada de eslabones conectados por
articulaciones.
-. /ara 0u sir2e sa&er e or%en %e un esa&$n3R= Para determinar todas las posibles combinaciones de eslabones
&!unta completa, semi!unta, !unta múltiple' que producir%n cualquier GDL
elegido.
4. Cu"ntos 5ra%os %e i&erta% tiene un esa&$n en e pano3R= ( GDL.
6. Cu"ntos 5ra%os %e i&erta% per,ite una 7unta es#ri!a 8!uantos una 7unta !i9n%ri!a3R= )na !unta es*+rica permite ( GDL, una !unta cil#ndrica $ GDL.
:. Men!iona a %i#eren!ia entre !a%ena !ine,"ti!a a&ierta 8!a%ena !ine,"ti!a !erra%a.R= )n mecanismo cerrado no tendr% puntos de f!ación abiertos o
nodos, puede tener uno o m%s grados de libertad. ientras, un
mecanismo abierto con m%s de un eslabón siempre tendr% m%s de ungrado de libertad, por lo que requiere tantos actuadores &motores' como
grados de libertad tenga.
7/24/2019 Tarea 1-Mecanismos
http://slidepdf.com/reader/full/tarea-1-mecanismos 2/2
;. Men!iona a %i#eren!ia entre &aan!9n 8 se5ui%or.R= -alanc#n se refere a un eslabón que ace un mo/imiento oscilatorio
est% conectado a la tierra. ientras que, un seguidor, es un eslabón
que sigue el mo/imiento de la mani/ela.
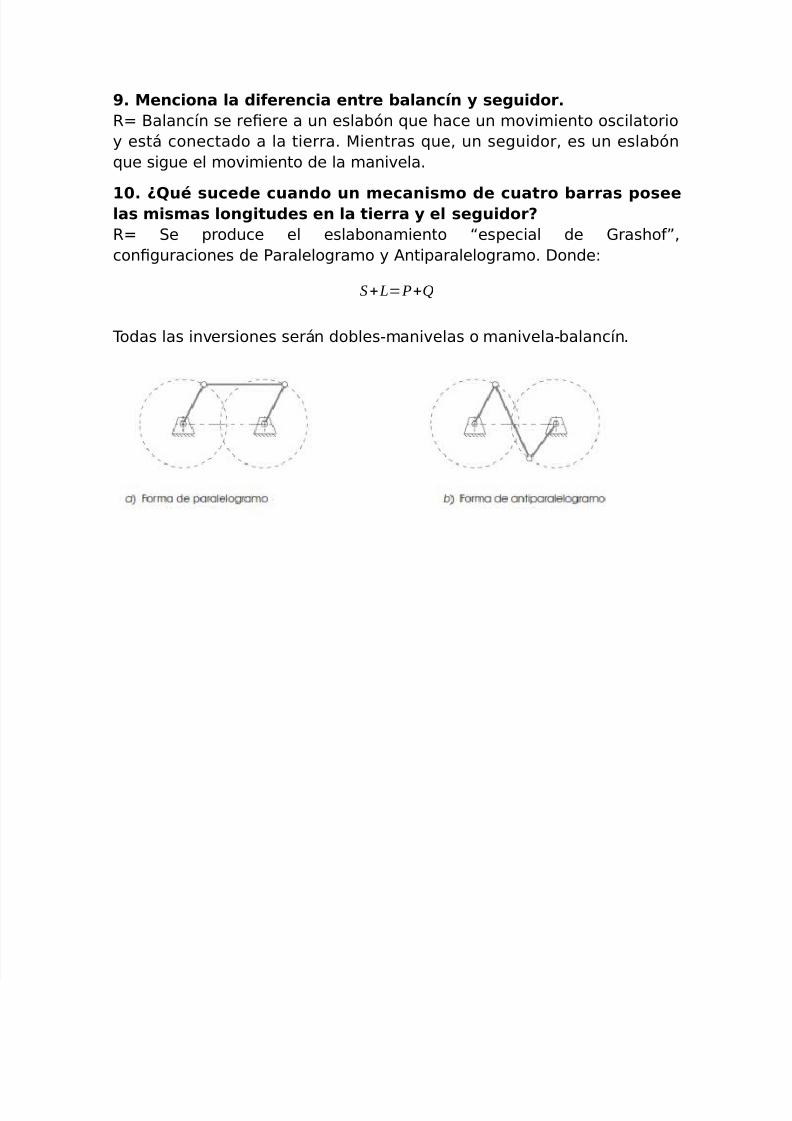
1<. =u su!e%e !uan%o un ,e!anis,o %e !uatro &arras poseeas ,is,as on5itu%es en a tierra 8 e se5ui%or3R= Se produce el eslabonamiento 0especial de Graso*1,
confguraciones de Paralelogramo 2ntiparalelogramo. Donde3
S+ L= P+Q
4odas las in/ersiones ser%n dobles5mani/elas o mani/ela5balanc#n.



















![Tarea 1[1]](https://img.pdfslide.es/doc/110x75/55a54dac1a28ab62708b4605/tarea-11-55b0fc7d158fc.jpg)





![Mecanismos[1]al fin](https://img.pdfslide.es/doc/110x75/55979d421a28abd8488b4635/mecanismos1al-fin.jpg)


