Embed Size (px)
DESCRIPTION
a
Citation preview
Pr´actica 5
SISTEMA DE CONTROL DE TEMPERATURA
5.1 Introduccio´n
Esta pra´ctica tiene como principal finalidad el trabajar con un sistema realimentado con un retraso importante entre el instante en que se aplica la sen˜al de control y aquel en el que la salida reacciona a dicha sen˜al (Sistema de Control de Procesos PT326 de FeedBack Ltd., ver Fig.5.1). Se estudian aspectos relacionados con el modelado de este tipo de sistemas utilizando modelos lineales reducidos, as´ı como distintas estrategias sencillas de control de estos sistemas: control proporcional, control Todo-Nada y control PID por computador.
Figura 5.1: PT326 – Sistema de control de procesos
1

PRA´ CTICA 5. SISTEMA DE CONTROL DE 2 Laboratorio de Control 2
Los aspectos ba´sicos que debe desarrollar el alumno en el laboratorio son los siguientes:
1. Estudio de los tiempos de retardo asociados a estos sistemas, as´ı como las constantes de tiempo de su dina´mica.
2. Estudio de un esquema de control Todo-Nada.
3. Estudio de un esquema de control proporcional.
4. Ana´lisis de la respuesta del sistema a perturbaciones.
5. Estudio de un esquema de control PID.
5.2 Requerimientos de la pra´ctica
Para la realizacio´n de la pra´ctica se requiere el siguiente equipo:
1. Sistema de control de procesos PT326 (ver Fig.5.1).
2. Divisores de tensio´n.
3. Sistema de adquisicio´n de datos por ordenador.
La pra´ctica no requiere de montajes complicados ya que en el propio mo´dulo PT326 esta´ integrado el equipo de control (proporcional y todo-nada), faltando so´lo el equipo de medida. La monitorizacio´n se realizara´ utilizando el computador en lugar de un osciloscopio. Para adaptar los niveles de tensio´n del sistema a la tarjeta de adquisicio´n de datos es necesario el uso de divisores de tensio´n.
Nota: Para poner en marcha el sistema, se debe poner a on el interruptor colocado en uno de los laterales. Adema´s el interruptor wattmeter/heater debe estar en heater (ver Fig.5.2).
No se debe tocar el sensor de medida, pues es muy fr´agil y se parte con facilidad.
5.3 PT326 – Sistema de Control de Procesos.
El sistema de control de procesos objeto de esta pra´ctica (Fig.5.3) se muestra esquema´ticamente en la Fig. 5.4.
En dicho sistema se pueden destacar los siguientes elementos:
PRA´ CTICA 5. SISTEMA DE CONTROL DE 3 Laboratorio de Control 3
Figura 5.2: Lateral del PT326. El interruptor wattmeter/heater debe estar en heater
Figura 5.3: Sistema de control de procesos PT326.
Figura 5.4: Esquema del sistema PT326

PRA´ CTICA 5. SISTEMA DE CONTROL DE 4 Laboratorio de Control 4
Proceso: Este t´ermino gen´erico se utiliza para describir un cambio f´ısico, qu´ımico, con- versio´n de energ´ıa, etc. A un proceso se le pueden asignar una serie de variables como pueden ser la presio´n, temperatura o velocidad de un fluido, ritmo al que se produce una reaccio´n qu´ımica, nivel de l´ıquido en un tanque, etc. En el caso que nos ocupa la temperatura del aire que circula por el tubo de proceso es la variable del proceso a controlar. Dicha temperatura es elevada a un valor deseado dentro de la gama de la temperatura ambiente hasta 60o C.
Elemento detector: Un termistor esf´erico acoplado al extremo de una sonda se encuentra al final del tubo del proceso. Sirve para obtener una medida de la temperatura a la que se encuentra el aire a la salida del tubo. Como se ha indicado, dicho termistor no debe tocarse ba jo ninguna circunstancia ya que es sumamente fr´agil.
Valor medido To : Es la sen˜al de salida del elemento medidor correspondiente a la variable del proceso a controlar : La temperatura al final del tubo.
Valor fijado Ti : Este es el valor de la referencia a la que se fija el control automa´tico, es decir, es el valor deseado de la temperatura. Este valor se puede ajustar bien mediante un potencio´metro, bien mediante la aplicacio´n de una tensio´n exterior comprendida entre 0 y 10 V. introducida por el puerto D.
Desviacion T : Es la diferencia entre el valor fijado y el valor medido T = Ti − To .
Perturbacion del valor fijado: Accionando el interruptor P ”perturbacio´n interna” del valor fijado (set value disturbance), se aplica internamente un cambio en escalo´n sobre el valor fijado. Es decir, a la referencia se le suma una sen˜al en escalo´n.
Elemento comparador: Se utiliza un amplificador sumador para comparar el valor me- dido a partir del amplificador puente con el valor fijado. En este equipo las sen˜ales esta´n dispuestas de forma que sean de signo opuesto, de modo que la salida del amplificador sumador representa la desviacio´n. Esta desviacio´n puede medirse a trav´es del puerto B.
Elemento controlador: Se aplica una sen˜al proporcional a la desviacio´n al elemento con- trolador, que genera a continuacio´n una sen˜al de control para ser transmitida a la unidad correctora.
En este equipo el elemento controlador puede ser conmutado (mediante el conmutador C2) para dar bien control continuo (C2 arriba) o bien control todo-nada (C2 abajo). La salida de control puede ser supervisada mediante el casquillo C del panel frontal.
Control continuo: El tipo de control continuo depende de la posicio´n del conmutador C1.
1. Interno (C1 arriba). Permite u´nicamente una accio´n proporcional. La ganancia se ajusta utilizando un potencio´metro. Dicha ganancia viene dada en tantos por ciento. El valor de la ganancia es la inversa del valor que marque el potencio´metro multiplicado por 100 (banda proporcional).
2. Externo (C1 aba jo). El ajuste de banda proporcional puede ser desconectado del circuito y en su lugar puede conectarse un Simulador de Control de Proceso PCS327. Este permite utilizar accio´n PI, PD y PID.

PRA´ CTICA 5. SISTEMA DE CONTROL DE 5 Laboratorio de Control 5
Control Todo-Nada: Cuando el elemento controlador esta´ conmutado para accio´n de dos pasos o “encendido-apagado”. Este tipo de control consiste en que la sen˜al de con- trol so´lo puede tomar dos valores. La conmutacio´n de la sen˜al de control se realiza fundamentalmente al cambiar el error de signo. Los para´metros ma´s significativos de este control son la potencia calo´rica ma´xima y el solape (overlap), que son definidos a continuacio´n:
• Potencia calorica m´axima. Este ajuste permite fijar la potencia aplicada al calefactor durante los periodos de “encendido” entre 15 y 80 vatios.
• Solape. Con un solape nulo la sen˜al de salida controladora hace que la potencia aplicada al calefactor alterne entre niveles ma´ximo y m´ınimo a medida que la condicio´n controlada cae por debajo o sube por encima del valor deseado.
Con un solape dado, la sen˜al de salida controladora hace que la potencia aplicada al calefactor alterne entre niveles ma´ximo y m´ınimo a medida que la condicio´n controlada cae por debajo de un l´ımite inferior (valor deseado - solape) o sube por encima de un l´ımite superior (valor deseado + solape). El valor de solape esta´ entre 0 y 4V.
Elemento motor: En cualquier proceso este elemento produce una salida que puede tomar la forma de potencia el´ectrica, desplazamiento meca´nico, etc. El nivel de la sen˜al de salida se ajusta en respuesta a una sen˜al procedente del elemento controlador. En este equipo el elemento motor es una fuente de alimentacio´n variable que proporciona una salida el´ectrica entre 15 y 80 vatios segu´n determine la sen˜al controladora.
Elemento actuador: Afecta directamente a la condicio´n controlada. En este equipo el elemento corrector es una rejilla de alambre calentada el´ectricamente, a la que se aplica la salida del elemento motor. El calor es transferido desde la rejilla a la corriente de aire, siendo el ritmo de la transferencia de calor dependiente de la temperatura del calefactor, de la velocidad de la corriente de aire, etc.
Referencia
Control ProcesoSalida
Medida
Figura 5.5: Esquema de control

PRA´ CTICA 5. SISTEMA DE CONTROL DE 6 Laboratorio de Control 6
5.4 Ana´lisis dina´mico del sistema
5.4.1 Retardo por distancia y velocidad de propagacion
En algunos sistemas f´ısicos existe un retraso importante entre la accio´n y la respuesta del sistema. En el caso que nos ocupa, se dispone de un tubo en el que en uno de los extremos se coloca una fuente de aire caliente (gobernada por una excitacio´n el´ectrica) y en el otro extremo un elemento de medida. Por observacio´n directa se identifica cada parte en el montaje notando que sobre el ventilador hay un pequen˜a trampilla, cuya funcio´n es la de dejar entrar ma´s o menos aire al tubo. Por tanto, cuanto ma´s abierta est´e la trampilla ma´s aire entrara´ para ser calentado y menor sera´ la temperatura del aire de salida (supuesta una fuente de calor constante). Es intuitivo que el sensor debe reflejar los cambios en la sen˜al de excitacio´n. Debido a la longitud del tubo y a que la velocidad de propagacio´n del aire caliente en el medio no es infinita, se produce un retraso en la respuesta del sistema a la variacio´n de la sen˜al el´ectrica que calienta la rejilla al principio del tubo.
Caso pr´actico
1. Situar la banda proporcional a 100% (equivale a ganancia 1 y es como si no existiera).
2. Ajustar ”set value” hasta que en el visor se vean temperaturas pro´ximas a 30o . En la pra´ctica este valor es so´lo orientativo, se trata de tener un valor distinto al del ambiente.
3. Abrir la trampilla que hay sobre el motor unos 40o .
4. En la clavija de external disturbance (conector D en la Fig. 5.4) introducir utilizando el ordenador un escalo´n de 2 V.
5. Seleccionar control continuo con los conmutadores C1 y C2 arriba.
6. Conectar, a trav´es de un divisor de tensio´n, el canal 0 de entrada del ordenador al terminal Y del mo´dulo.
A continuacio´n se vera´ que la forma de onda de la salida tiende a alcanzar a la entrada (Fig.5.6). El retraso por distancia y velocidad viene representado por DT.
Si se repite el experimento para distintos a´ngulos de apertura (40o , 120o y 160o ), se obtiene aproximadamente el resultado que se muestra en la tabla:
Apertura Retraso (s)40o 0.2
120o 0.16160o 0.14

Referencia
PRA´ CTICA 5. SISTEMA DE CONTROL DE 7 Laboratorio de Control 7
SalidaV
t
DT τ
Figura 5.6: Retrasos en el sistema
En los resultados se debe tener en cuenta que la salida esta´ invertida respecto a la entrada.
5.4.2 Funcion de transferencia del sistema
La respuesta del detector a una entrada en escalo´n en la potencia del aire caliente tiene dos retrasos (por distancia y velocidad, que dan lugar al retardo DT que aparece en la Fig.5.7), que no tienen efecto en la forma de la sen˜al, pero tambi´en hay un retraso, llamado de transferencia, que s´ı afecta a la forma de onda de la sen˜al en el detector.
Esto es debido a lo que se podr´ıa llamar ”inercia” del aire a ser calentado (o enfriado), lo que dar´ıa lugar a una respuesta con forma aproximadamente exponencial como en la Fig.5.7. El proceso es en realidad ma´s complejo (sistema de para´metros distribuidos), lo que da pie a una forma de onda a la salida distinta, fruto de la combinacio´n de varias exponenciales correspondientes a distintas constantes de tiempo asociadas a las distintas dina´micas que entran en juego. En el caso en que una de dichas constante de tiempo sea muy dominante, la respuesta se parecera´ ma´s a la exponencial (simplificacio´n de modelado).
Asimismo, el sistema presentara´ una determinada ganancia, de modo que se podra´ aproxi- mar por un sistema de primer orden con una constante de tiempo y ganancia esta´tica carac- ter´ısticas:
K DT s (5.1)GP T 326 ≈ 1 + τ s
e−
Caso pr´actico
Llegado este punto, y con los ajustes del equipo realizados en el apartado anterior (apertura de 40o ), se excita con un escalo´n de 2 V., obteniendo la forma de la sen˜al de salida, a la

2
PRA´ CTICA 5. SISTEMA DE CONTROL DE 8 Laboratorio de Control 8
V
1
0.63
DT τ
t
Figura 5.7: Retraso de transferencia
vez que se toman los valores de retraso, tensio´n de pico y sobreoscilacio´n. La respuesta es parecida a la ya indicada en la Fig. 5.6, donde el retraso por transferencia viene indicado por τ . Es comu´n en estos casos realizar una simplificacio´n consistente en modelar este tipo de respuesta por la de un sistema de primer orden con un retardo, despreciando de esta forma las dina´micas asociadas a constantes de tiempo menores (dina´mica mucho ma´s ra´pida). Para una sen˜al cuadrada de entrada de 2 V. pp y frecuencia 0.2 Hz, el valor final de la sen˜al de salida medido es cercano a 1.7 V pp. Por lo tanto, el 63% de este valor es 1.071 V., que se alcanza a los 0.5 s (constante de tiempo τ ). La ganancia esta´tica del proceso sera´ K = 1.7 = 0.85.
Repitiendo el estudio para una apertura de 120o el valor pico a pico obtenido es de 0.9 V. (K = 0.45) y la constante de tiempo de 0.4 s.

PRA´ CTICA 5. SISTEMA DE CONTROL DE 9 Laboratorio de Control 9
5.5 Esquemas ba´sicos de control
En este apartado se van a aplicar distintos esquemas de control de la temperatura de salida del aire. En concreto se realizara´ un control todo-nada, un control proporcional.
Para configurar el dispositivo para realizar estos tipos de control se cierra el bucle uniendo los terminales X e Y mediante un cable, conectando as´ı el amplificador con el elemento de medida. De este modo se consigue la realimentacio´n de la variable de salida.
5.5.1 Control todo-nada.
En este apartado se va a realizar un control sobre la cantidad de calor que entra al tubo. Se procedera´ de dos formas:
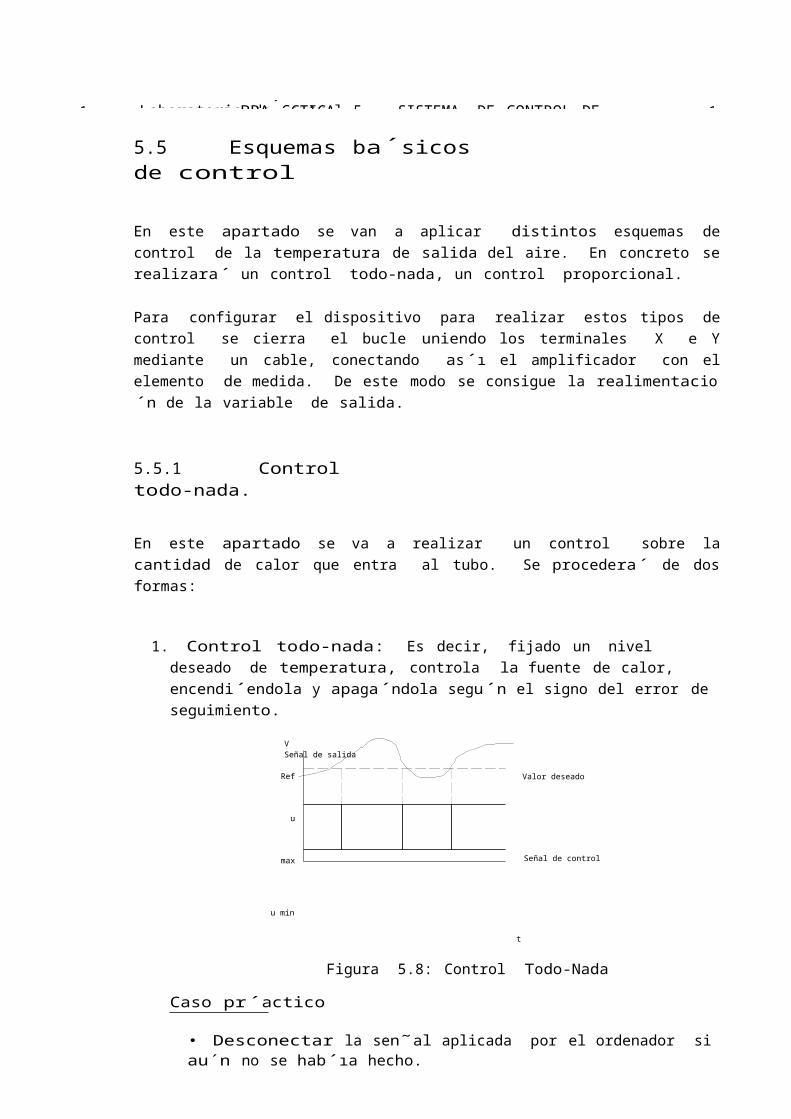
1. Control todo-nada: Es decir, fijado un nivel deseado de temperatura, controla la fuente de calor, encendi´endola y apaga´ndola segu´n el signo del error de seguimiento.
V Señal de salida
Ref
u max
u min
Valor deseado
Señal de control
t
Figura 5.8: Control Todo-Nada
Caso pr´actico
• Desconectar la sen˜al aplicada por el ordenador si au´n no se hab´ıa hecho.
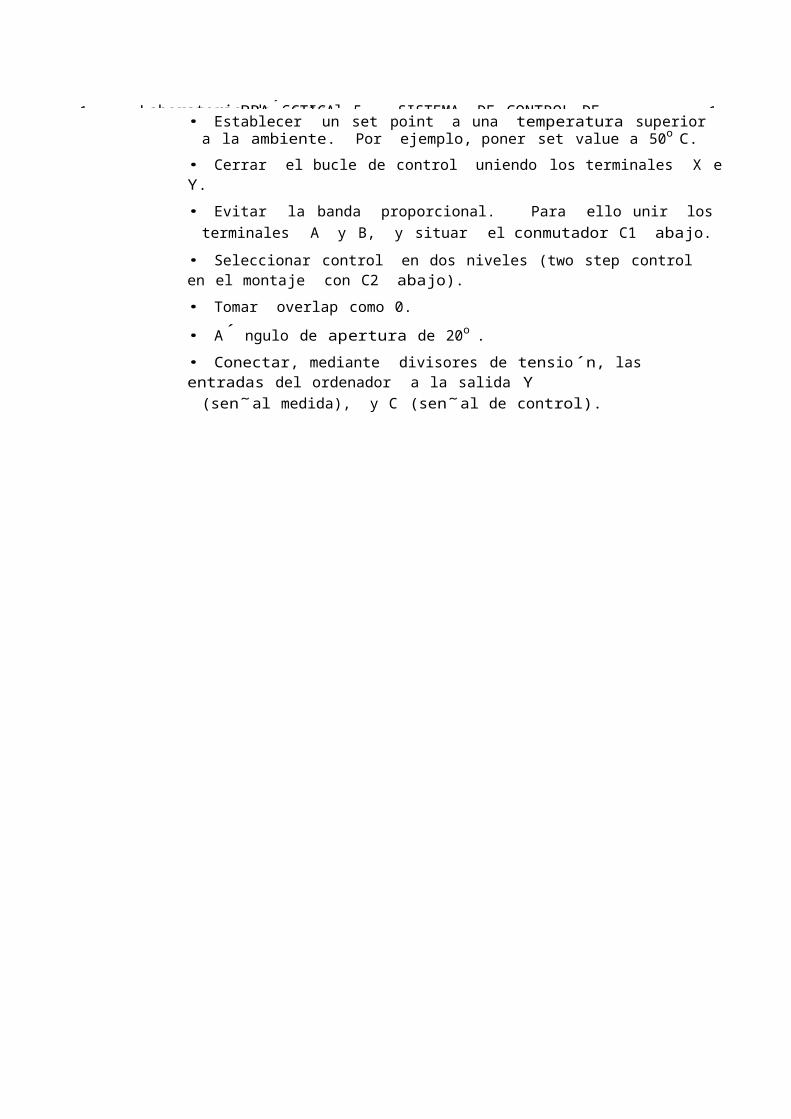
• Establecer un set point a una temperatura superior a la ambiente. Por ejemplo, poner set value a 50o C.
• Cerrar el bucle de control uniendo los terminales X e Y.
• Evitar la banda proporcional. Para ello unir los terminales A y B, y situar el conmutador C1 abajo.
• Seleccionar control en dos niveles (two step control en el montaje con C2 abajo).
• Tomar overlap como 0.
• A´ ngulo de apertura de 20o .
• Conectar, mediante divisores de tensio´n, las entradas del ordenador a la salida Y(sen˜al medida), y C (sen˜al de control).

Valor deseado
PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
Conviene tomar nota de las formas de onda a la salida, de los valores de amplitud pico a pico, y de la frecuencia de oscilacio´n de la sen˜al medida.
Si se lleva a cabo la experiencia, se puede estimar la frecuencia de un ciclo completo de conmutacio´n, que resulta ser de 0.74 Hz. La amplitud de la onda de salida es 4 V. pp, siendo la sen˜al de control de 10 V. pp (sen˜al cuadrada de la Fig. 5.8).
2. Overlap : Se permite a la sen˜al correspondiente a la medida, que oscile entre dos valores, ma´ximo y m´ınimo, fijados por el usuario. As´ı, se denomina overlap al rango de valores en los que puede oscilar la sen˜al medida.
V Señal de salida
Ref
u max
u min Señal de control
Overlap
t
Figura 5.9: Control Todo-Nada con Overlap
Caso pr´actico
• Manteniendo la configuracio´n utilizada en el caso anterior (control todo-nada sin over- lap) analizar la respuesta del sistema para distintos valores de overlap en el rango 0-4.
Conviene tomar nota de las formas de onda a la salida, de los valores de amplitud pico a pico, y de la frecuencia de oscilacio´n de la sen˜al medida para los distintos valores de overlap.
5.5.2 Control proporcional
Se entiende como error la diferencia entre la sen˜al de referencia y el valor medido, que en el montaje se puede apreciar directamente en los niveles situados en el frontal del equipo (ver Fig.5.10)
El visor debe utilizarse so´lo cualitativamente, ya que el error realmente producido se mide en el puerto B en forma de tensio´n. Se puede realizar una correlacio´n entre la medida que da el visor en el frontal y la tensio´n medida a la salida del sistema, de modo que se pueden relacionar linealmente la temperatura del aire con la tensio´n medida a la salida:

PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
20 30 40 50 60 70 80 º C
20 30 40 50 60 70 80 º C
Error
Figura 5.10: Diferencia entre sen˜al medida y valor deseado
Temperatura (o C) Tensio´n (V)354045505560
de modo que se puede obtener: T = 2.5V + 25.
En un controlador con accio´n proporcional, la sen˜al de control es directamente proporcional al error, y ´estas se relacionan entre s´ı por la ganancia del controlador (inversa de la banda proporcional en el montaje).
Caso pr´actico
• Cerrar el bucle de control uniendo los terminales X e Y.
• Comprobar que los terminales A y B NO ESTE´ N UNIDOS para poder aplicar la banda proporcional.
• Seleccionar control continuo (conmutadores C1 y C2 arriba).
• Apertura a 40o .
• Situar set value a 50o C.
Variando la banda proporcional desde 200% hasta 40%, se puede tomar nota de los errores y crear una tabla en la que se tenga error (en r´egimen permanente) frente a banda proporcional.

PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
Es interesante recordar que:
ganancia =100
Banda Proporcional
Midiendo el error en r´egimen permanente para distintas ganancias y para un apertura de 40o , se puede obtener una tabla como la siguiente:
a´ngulo de
Banda prop. (%) e.r.p. (V.) e.r.p. (o C)200 5 13160 5 12.5100 4 1160 3.5 840 3.1 6
Para un a´ngulo de apertura de 20o , se puede obtener una tabla similar, pudiendo aparecer oscilaciones con valores altos de la ganancia:
Banda prop. (%) e.r.p. (V.) e.r.p. (o C)200 2.8 9160 2.6 8100 2 660 1.5 440 1.1 3
5.6 Respuesta del sistema a perturbaciones
Para analizar la respuesta del sistema ante perturbaciones, ´estas se pueden introducir de dos maneras:
1. Variando bruscamente la cantidad de aire caliente que entra al tubo mientras se mantiene una referencia constante.
2. Variando bruscamente la sen˜al de nivel deseado (modificacio´n de la referencia).
Caso pr´actico
• Cerrar el bucle de control uniendo los terminales X e Y.

PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
• Comprobar que los terminales A y B NO est´en unidos.
• Seleccionar control continuo (conmutadores C1 y C2 arriba).
• Ajustar set value a 50o C.
• Apertura a 40o .
La pra´ctica consta de dos partes:
1. Variar bruscamente el grado de apertura de la rejilla de 40o a 60o , buscando una variacio´n de aire que entra en el tubo. Entonces tomar nota del error en r´egimen permanente y repetir la prueba para diversos valores de la banda proporcional entre 200% y 40%. Se puede comprobar que al abrir la rejilla la temperatura de salida baja, pudiendo compensarse este efecto aumentando la ganancia del control proporcional.
Realizando el experimento se puede obtener una tabla como la siguiente:
Banda prop. (%) Apertura (o ) e.r.p. (V.) e.r.p. (o
200 40 5200 60 6.4160 40 5 12.5160 60 6.4100 40 4100 60 560 40 3.560 60 4 11.540 40 3.140 60 3.4
2. Introducir usando el ordenador un escalo´n de 2V. en D. Para bandas proporcionales de50% y 100% tomar nota de valores de pico, del periodo de oscilacio´n y del error.
Si se excita con un escalo´n y se analiza el transitorio de la sen˜al, tanto de la medida como del error (referencia menos medida), cualitativamente estos tomara´n la forma que se ve en la Fig. 5.11.
Ante esta respuesta, se mide la sobreoscilacio´n y el per´ıodo. Para una banda propor- cional del 50% la sobreoscilacio´n de la sen˜al medida es 0.6 V. Repitiendo el proceso para una banda proporcional del 30% se obtiene una sobreoscilacio´n en la medida de0.8 V. Se puede ver que aumentando la ganancia, la sobreoscilacio´n aumenta.

PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
Perturbacion
SalidaV
SO
t
Figura 5.11: Transitorio Frente a una Perturbacio´n Interna
5.7 Control PID por computador
Se pretende implementar un control PID del secador mediante el uso del computador. Se debera´ disen˜ar un controlador PID a partir del modelo obtenido experimentalmente, as´ı como comprobar el comportamiento del PID ante perturbaciones similares a las realizadas para el control por banda proporcional.
La referencia y los para´metros del controlador se introducira´n mediante la pantalla de ex- plotacio´n.
Caso pr´actico
1. Conectar, mediante un divisor de tensio´n, el canal 0 del ordenador con la salida del proceso Y.
2. Situar el conmutador C1 abajo.
3. Seleccionar control continuo (conmutador C2 arriba).
4. Conectar la sen˜al de control generada por el computador en el terminal A.
PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
Figura 5.12: Pantalla de explotacio´n de LabVIEW.
PRA´ CTICA 5. SISTEMA DE CONTROL DE 1 Laboratorio de Control 1
5.8 Cuestiones sobre la pra´ctica
1. Comentar todos los resultados de los experimentos
2. Indicar los problemas que pueden aparecer cuando se coloca la referencia en una tem- peratura muy alta en el control todo-nada
3. Sugiera la relacion cualitativa entre el overlap y la frecuencia de la sen˜al de control
4. De una explicacion al hecho de que para temperaturas muy altas de referencia la pro- porcion entre los tiempos de on-off sea tambi´en muy alta en el control todo-nada con overlap
5. Indique la influencia de la banda proporcional en el control todo-nada
6. Explique el comportamiento obtenido con el controlador PID.





























