Embed Size (px)
DESCRIPTION
sistemas de la excavadora
Citation preview
3.9. Tutorial Excavadora
3.9.1. Introducción
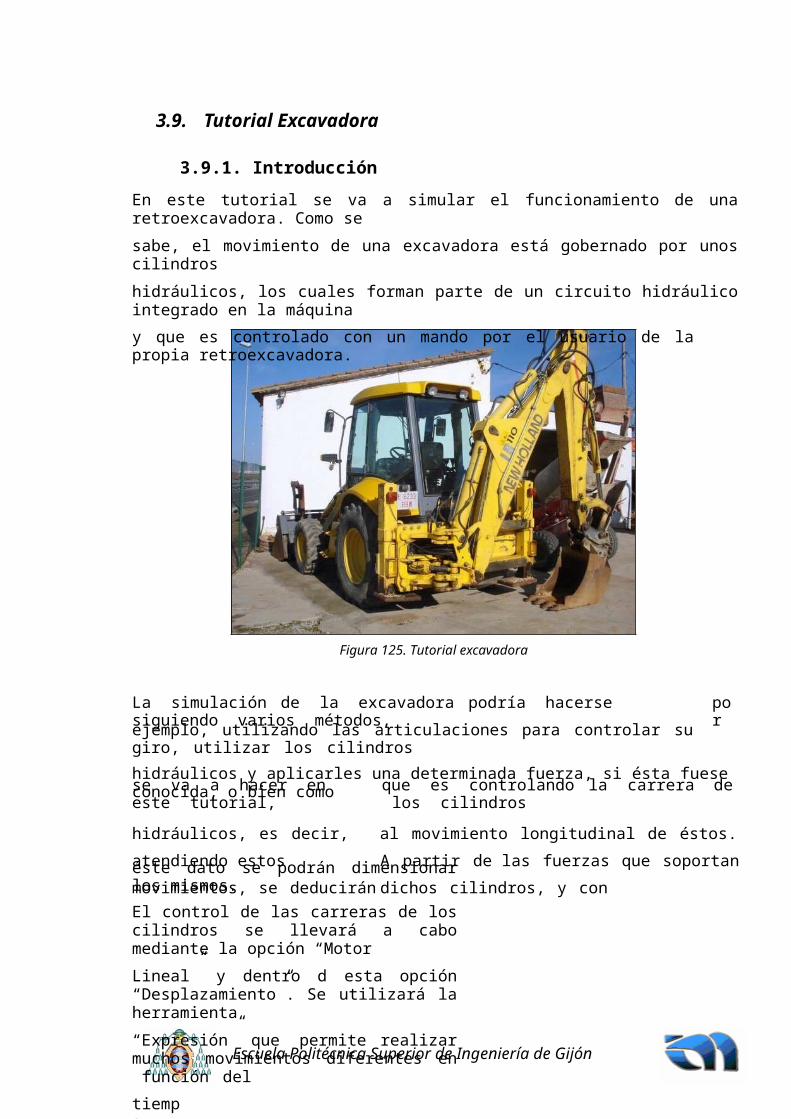
En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se
sabe, el movimiento de una excavadora está gobernado por unos cilindros
hidráulicos, los cuales forman parte de un circuito hidráulico integrado en la máquina
y que es controlado con un mando por el usuario de la propia retroexcavadora.
Figura 125. Tutorial excavadora
La simulación de la excavadora podría hacerse siguiendo varios métodos, por
ejemplo, utilizando las articulaciones para controlar su giro, utilizar los cilindros
hidráulicos y aplicarles una determinada fuerza, si ésta fuese conocida, o bien como
se va a hacer en este tutorial,
hidráulicos, es decir, atendiendo
estos movimientos, se deducirán
que es controlando la carrera de los cilindros
al movimiento longitudinal de éstos. A partir de
las fuerzas que soportan dichos cilindros, y con
éste dato se podrán dimensionar los mismos.
El control de las carreras de los cilindros se llevará a cabo mediante la opción “Motor
Lineal” y dentro d esta opción “Desplazamiento”. Se utilizará la herramienta
“Expresión” que permite realizar muchos movimientos diferentes en función del
tiempo.
Escuela Politécnica Superior de Ingeniería de Gijón
3.9.2. SolidWorks Motion
En “Estudio de movimiento 1” seleccionamos la pestaña “Análisis de movimiento”.
En primer lugar, hay que asegurarse de que la parte trasera de la excavadora está
fija, mientras que el resto de componentes de la excavadora están libres.
También es importante activar la opción “Gravedad” ya que el fin del tutorial es
dimensionar los cilindros en base a la fuerza que éstos tienen que realizar, y los
resultados no serían correctos si no se tuviese en cuenta la fuerza de la gravedad.
Se activa sin más que acudir al menú de “SolidWorks Motion” y escoger dicha
opción. Es importante elegir la dirección Y.
Figura 126. Excavadora 1
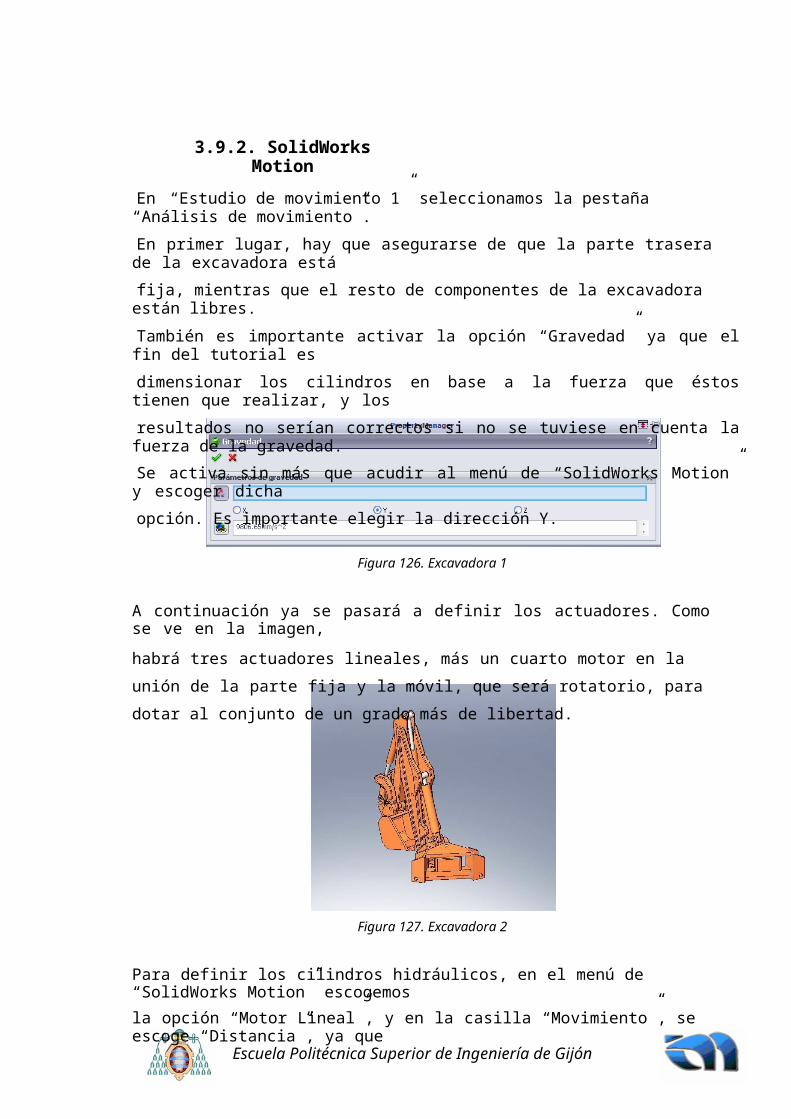
A continuación ya se pasará a definir los actuadores. Como se ve en la imagen,
habrá tres actuadores lineales, más un cuarto motor en la unión de la parte fija y la
móvil, que será rotatorio, para dotar al conjunto de un grado más de libertad.
Figura 127. Excavadora 2
Para definir los cilindros hidráulicos, en el menú de “SolidWorks Motion” escogemos
la opción “Motor Lineal”, y en la casilla “Movimiento”, se escoge “Distancia”, ya que
Escuela Politécnica Superior de Ingeniería de Gijón
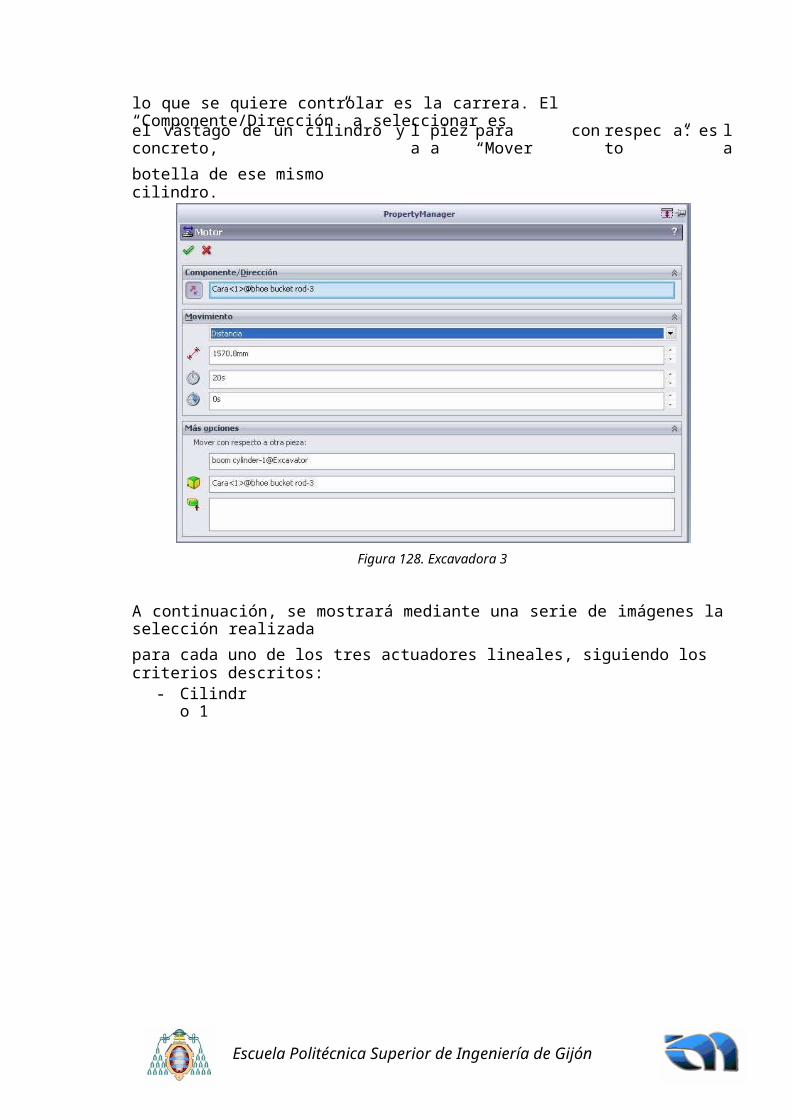
lo que se quiere controlar es la carrera. El “Componente/Dirección” a seleccionar es
el vástago de un cilindro concreto,
botella de ese mismo cilindro.
y la pieza para “Mover con respecto a:” es la
Figura 128. Excavadora 3
A continuación, se mostrará mediante una serie de imágenes la selección realizada
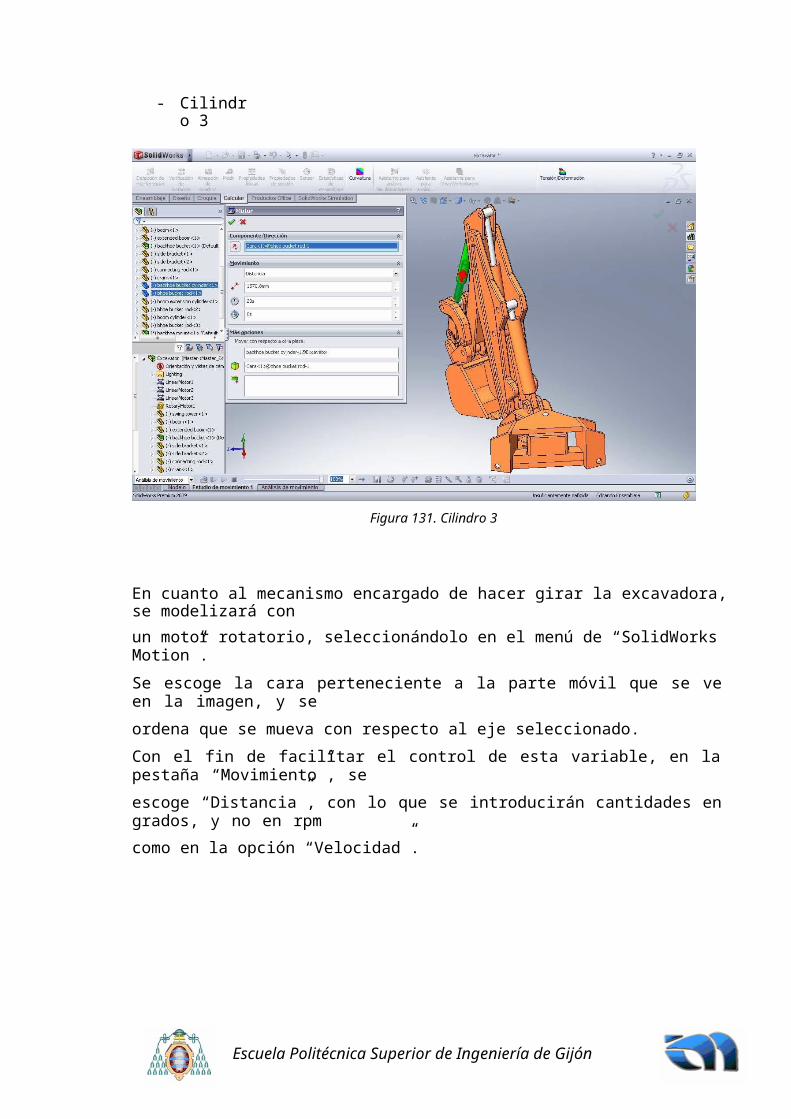
para cada uno de los tres actuadores lineales, siguiendo los criterios descritos:
Cilindro 1-
Escuela Politécnica Superior de Ingeniería de Gijón
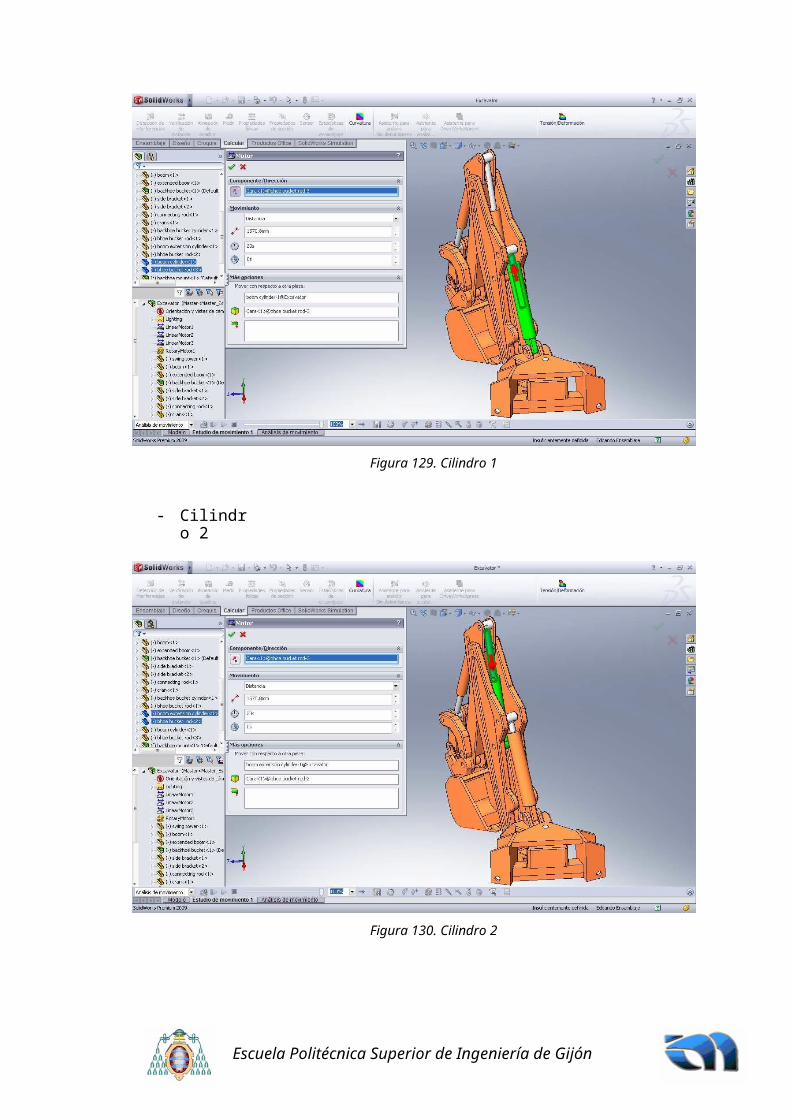
Figura 129. Cilindro 1
Cilindro 2-
Figura 130. Cilindro 2
Escuela Politécnica Superior de Ingeniería de Gijón
- Cilindro 3
Figura 131. Cilindro 3
En cuanto al mecanismo encargado de hacer girar la excavadora, se modelizará con
un motor rotatorio, seleccionándolo en el menú de “SolidWorks Motion”.
Se escoge la cara perteneciente a la parte móvil que se ve en la imagen, y se
ordena que se mueva con respecto al eje seleccionado.
Con el fin de facilitar el control de esta variable, en la pestaña “Movimiento”, se
escoge “Distancia”, con lo que se introducirán cantidades en grados, y no en rpm
como en la opción “Velocidad”.
Escuela Politécnica Superior de Ingeniería de Gijón
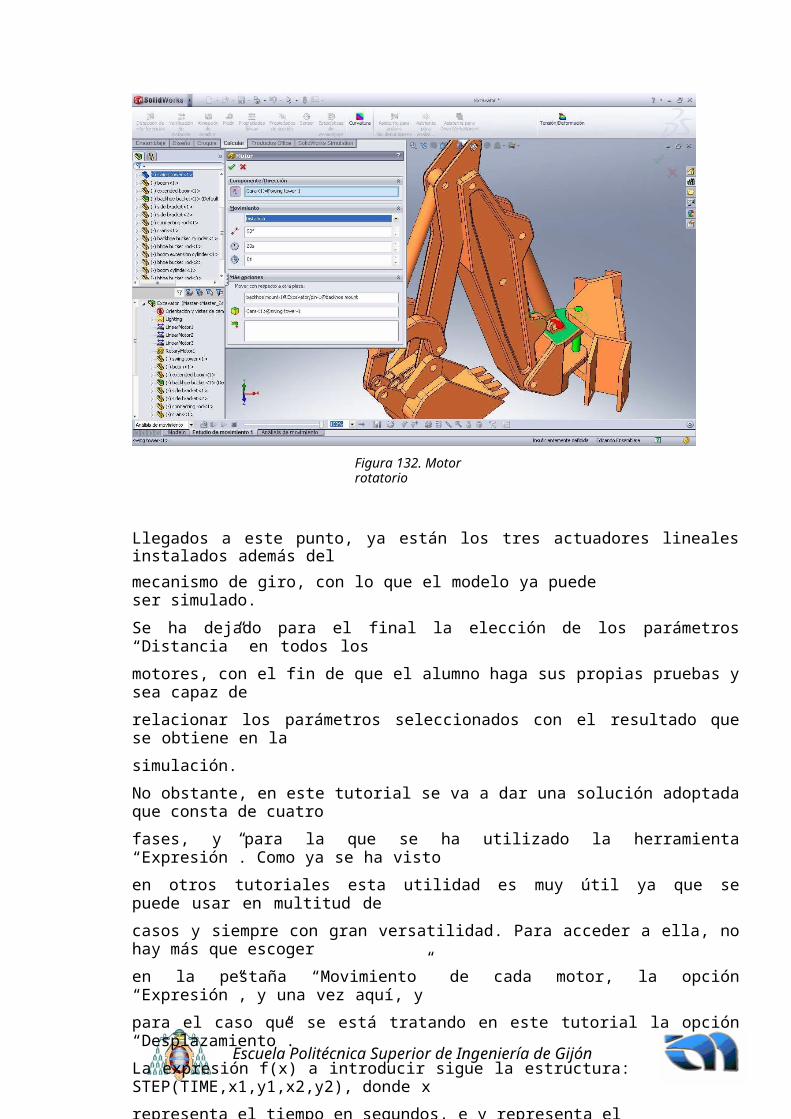
Figura 132. Motor rotatorio
Llegados a este punto, ya están los tres actuadores lineales instalados además del
mecanismo de giro, con lo que el modelo ya puede ser simulado.
Se ha dejado para el final la elección de los parámetros “Distancia” en todos los
motores, con el fin de que el alumno haga sus propias pruebas y sea capaz de
relacionar los parámetros seleccionados con el resultado que se obtiene en la
simulación.
No obstante, en este tutorial se va a dar una solución adoptada que consta de cuatro
fases, y para la que se ha utilizado la herramienta “Expresión”. Como ya se ha visto
en otros tutoriales esta utilidad es muy útil ya que se puede usar en multitud de
casos y siempre con gran versatilidad. Para acceder a ella, no hay más que escoger
en la pestaña “Movimiento” de cada motor, la opción “Expresión”, y una vez aquí, y
para el caso que se está tratando en este tutorial la opción “Desplazamiento”.
La expresión f(x) a introducir sigue la estructura: STEP(TIME,x1,y1,x2,y2), donde x
representa el tiempo en segundos, e y representa el desplazamiento en mm.
Siguiendo esta metodología, a continuación se detallan las expresiones a introducir
en cada uno de los motores, con el fin de conseguir una simulación en la excavadora
en la que el proceso a realizar sea:
Escuela Politécnica Superior de Ingeniería de Gijón
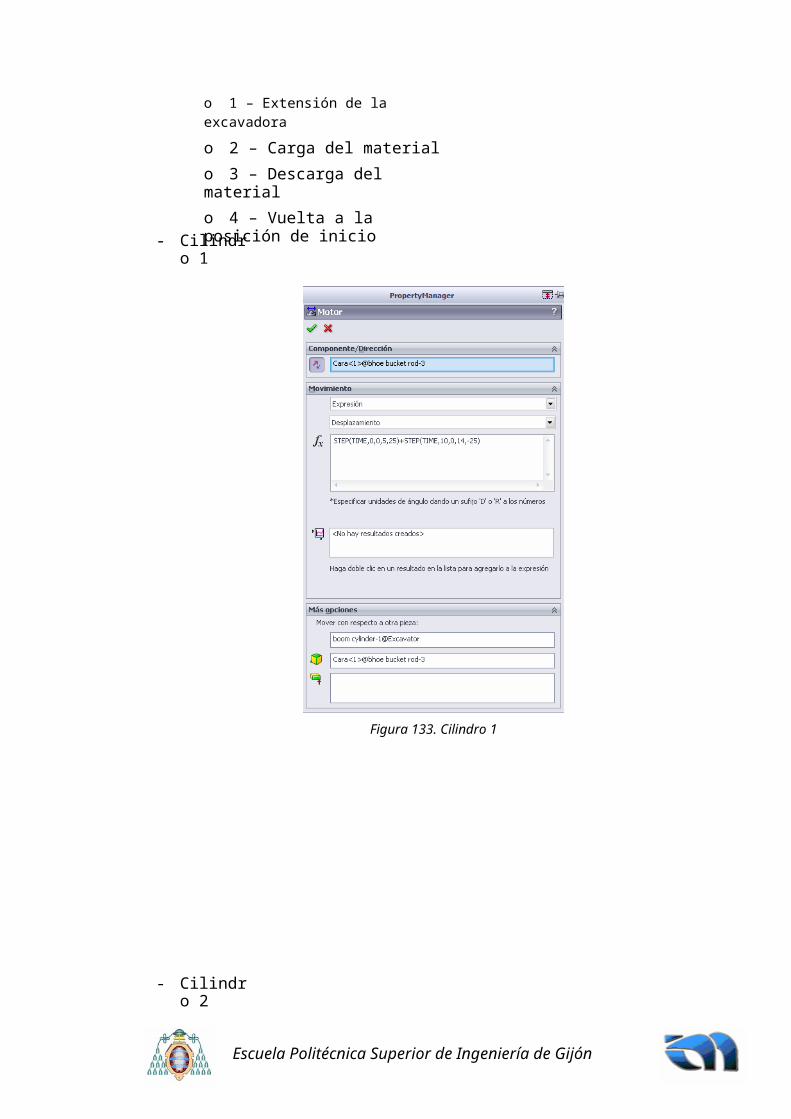
o 1 – Extensión de la excavadora
o 2 – Carga del material
o 3 – Descarga del material
o 4 – Vuelta a la posición de inicio
- Cilindro 1
Figura 133. Cilindro 1
- Cilindro 2
Escuela Politécnica Superior de Ingeniería de Gijón
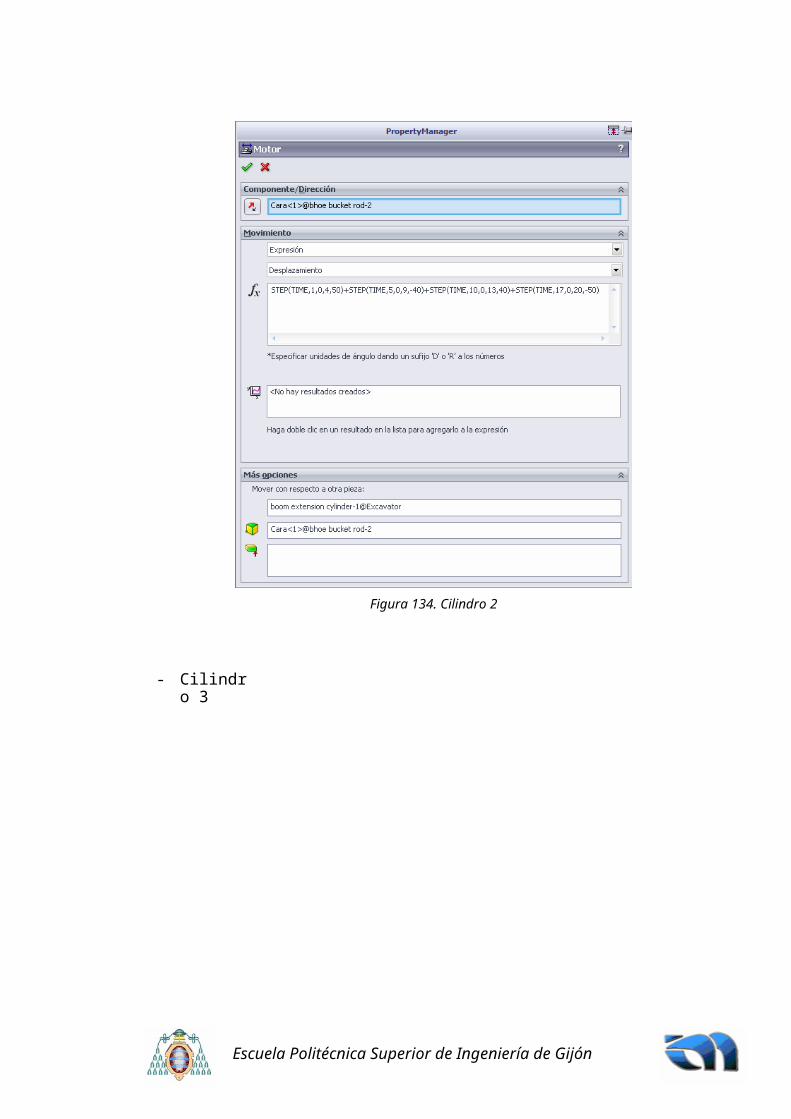
Figura 134. Cilindro 2
- Cilindro 3
Escuela Politécnica Superior de Ingeniería de Gijón
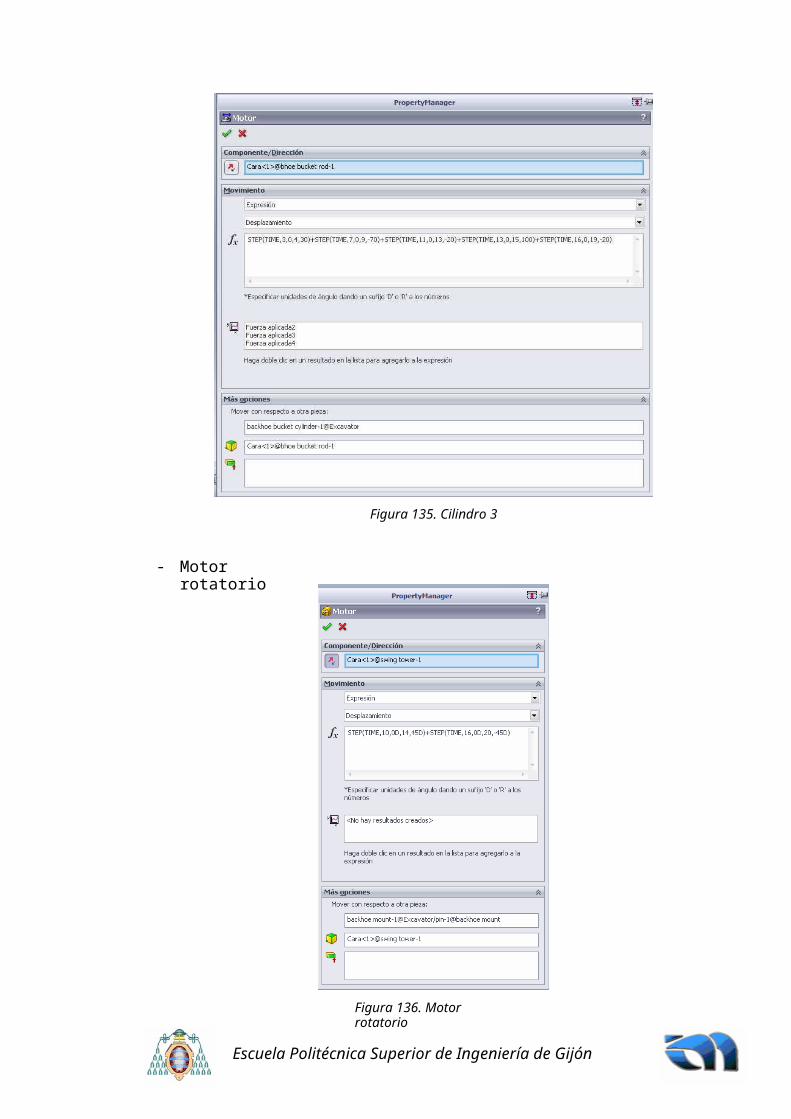
Figura 135. Cilindro 3
- Motor rotatorio
Figura 136. Motor rotatorio
Escuela Politécnica Superior de Ingeniería de Gijón
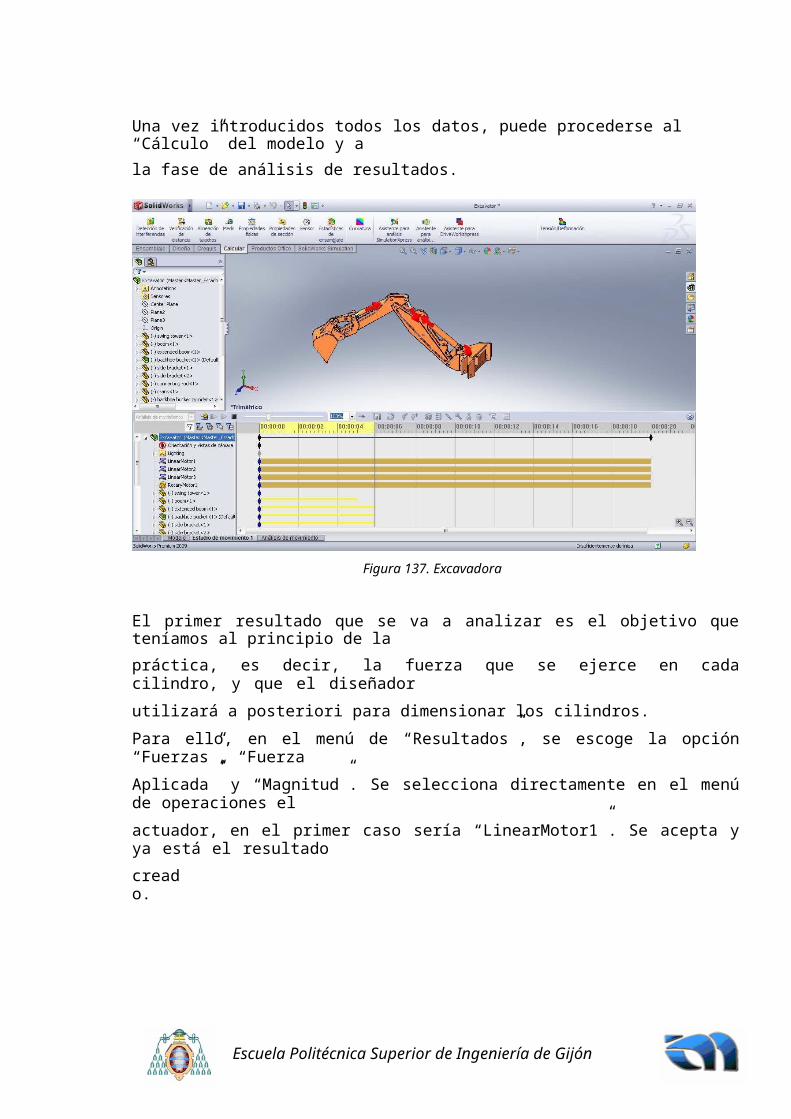
Una vez introducidos todos los datos, puede procederse al “Cálculo” del modelo y a
la fase de análisis de resultados.
Figura 137. Excavadora
El primer resultado que se va a analizar es el objetivo que teníamos al principio de la
práctica, es decir, la fuerza que se ejerce en cada cilindro, y que el diseñador
utilizará a posteriori para dimensionar los cilindros.
Para ello, en el menú de “Resultados”, se escoge la opción “Fuerzas”, “Fuerza
Aplicada” y “Magnitud”. Se selecciona directamente en el menú de operaciones el
actuador, en el primer caso sería “LinearMotor1”. Se acepta y ya está el resultado
creado.
Escuela Politécnica Superior de Ingeniería de Gijón
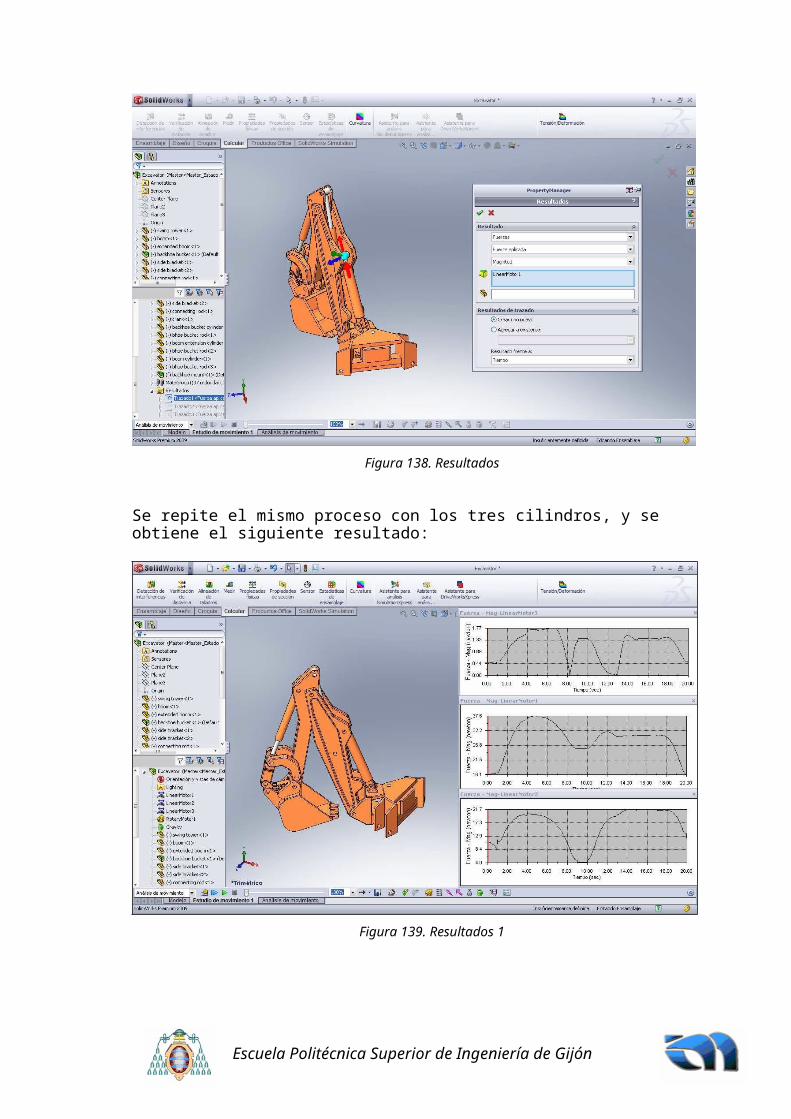
Figura 138. Resultados
Se repite el mismo proceso con los tres cilindros, y se obtiene el siguiente resultado:
Figura 139. Resultados 1
Escuela Politécnica Superior de Ingeniería de Gijón
Como se puede observar, las fuerzas que se obtienen son relativamente bajas, lo
cual se debe a que la simulación de la excavadora se está realizando sin someter a
ésta a ninguna carga a parte de la fuerza de la gravedad.
Estos resultados serían válidos para dimensionar la máquina sin carga, pero para
realizar una simulación más real, se someterá a la excavadora a una fuerza durante
los periodos de carga y descarga, esto es entre los segundos 8 y 14 de 500
Newtons, haciendo la suposición de que en cada carga el cazo transporta 50 Kg.
aproximadamente.
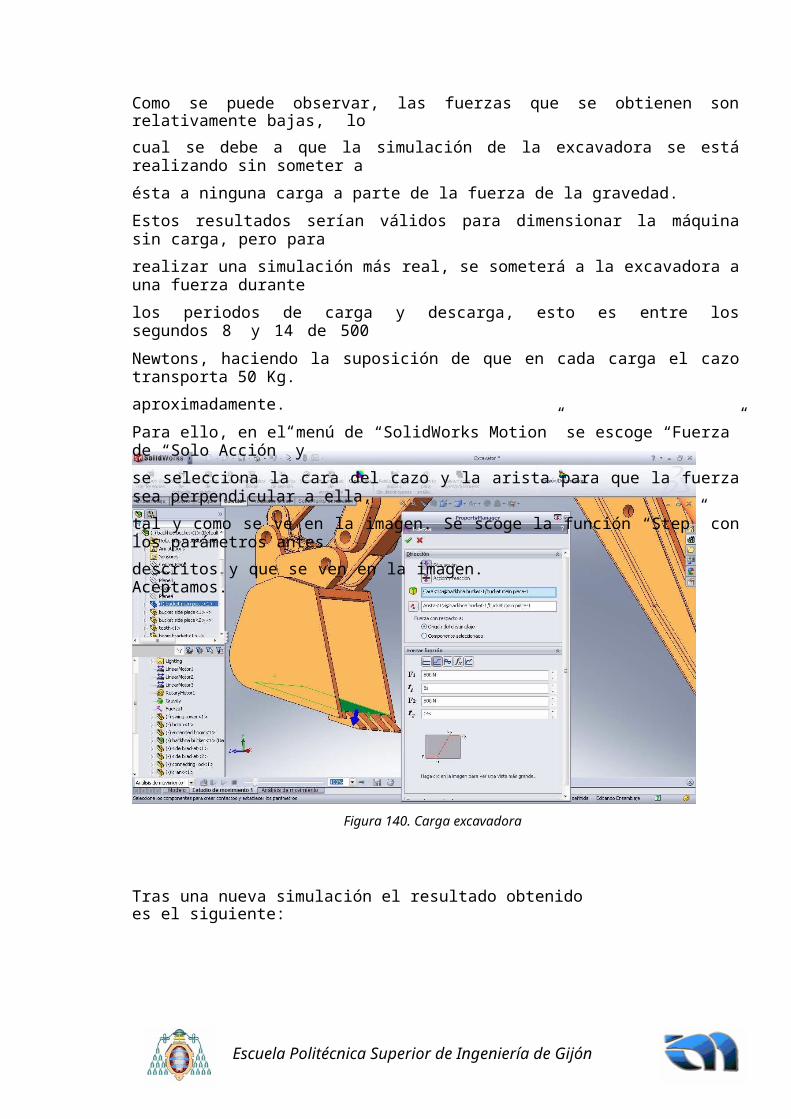
Para ello, en el menú de “SolidWorks Motion” se escoge “Fuerza” de “Solo Acción” y
se selecciona la cara del cazo y la arista para que la fuerza sea perpendicular a ella,
tal y como se ve en la imagen. Se scoge la función “Step” con los parámetros antes
descritos y que se ven en la imagen. Aceptamos.
Figura 140. Carga excavadora
Tras una nueva simulación el resultado obtenido es el siguiente:
Escuela Politécnica Superior de Ingeniería de Gijón
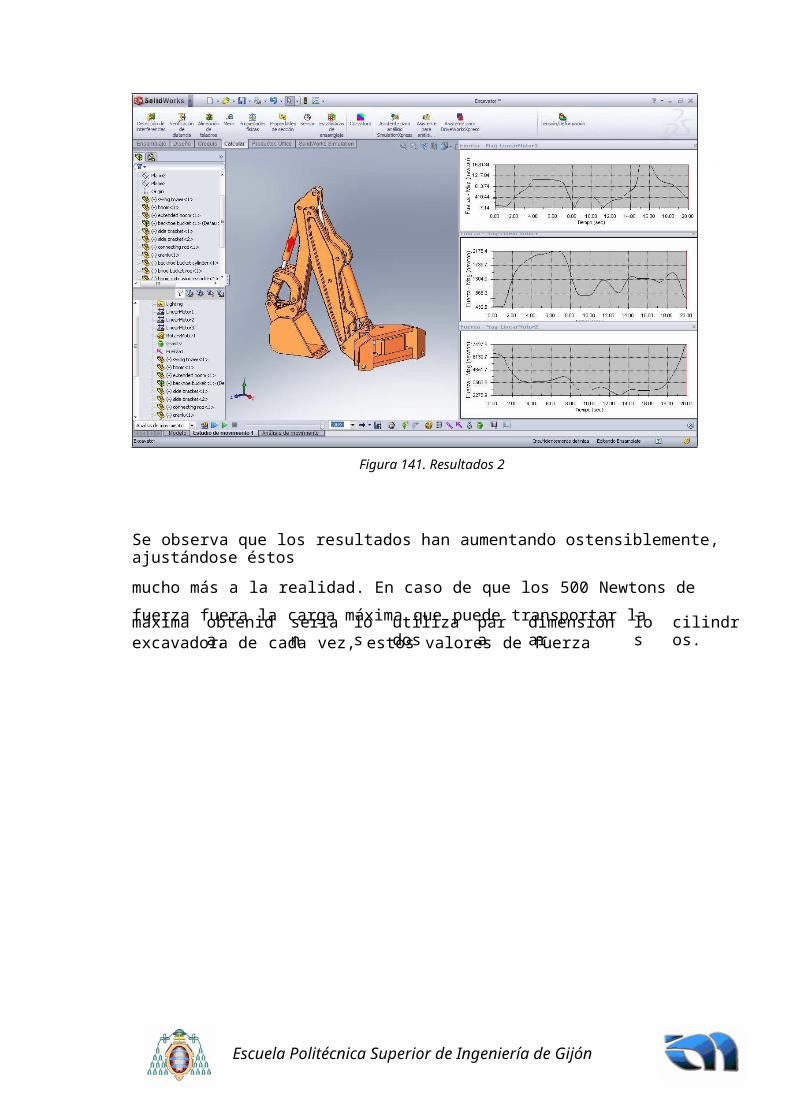
Figura 141. Resultados 2
Se observa que los resultados han aumentando ostensiblemente, ajustándose éstos
mucho más a la realidad. En caso de que los 500 Newtons de fuerza fuera la carga
máxima que puede transportar la excavadora de cada vez, estos valores de fuerza
máxima obtenida, serían los utilizados para dimensionar los cilindros.
Escuela Politécnica Superior de Ingeniería de Gijón