Iván Palacios Sánchez
ANÁLISIS DEL PAR MECÁNICO DESARROLLADO POR LOS MOTORES DE INDUCCIÓN TRIFÁSICOS
TRABAJO FINAL DE GRADO
Dirigido por el Prof. Luis Guasch Pesquer
Grado de Ingeniería Eléctrica
Tarragona
2017


Índice
1 Introducción .............................................................................................. 5
2 El motor de inducción trifásico, MdI ..................................................... 7
2.1.1 Altura de eje .............................................................................................................. 9
2.1.2 Número de pares de polos ...................................................................................... 10
3 Base de datos utilizada de los MdI ........................................................ 12
4 Análisis de los Motores de Inducción Trifásicos MdI ......................... 21
1.1 Objetivo ........................................................................................................................ 5
1.2 Antecedentes ................................................................................................................ 5
1.3 Alcance .......................................................................................................................... 5
1.4 Estructura del trabajo ................................................................................................. 6
2.1 Constitución del MdI ................................................................................................... 7
2.2 Principio de funcionamiento ..................................................................................... 10
2.3 Característica mecánica del motor .......................................................................... 11
3.1 Catálogos .................................................................................................................... 12
3.2 Características de la base de datos de los MdI ....................................................... 14
4.1 Par mecánico en función de la potencia, velocidad de sincronismo ...................... 22
4.2 Par mecánico en función de la velocidad nominal, potencia nominal .................. 24
4.3 Par mecánico en función de la velocidad nominal, frecuencia y deslizamiento ... 25
4.4 Par mecánico arranque/nominal en función de la velocidad
nominal/sincronismo, potencia nominal .......................................................................... 27
4.5 Par mecánico máximo/nominal en función de la velocidad nominal/sincronismo,
potencia nominal ................................................................................................................ 29
4.6 Par mecánico máximo/Par arranque en función de velocidad
nominal/sincronismo, potencia nominal .......................................................................... 31
4.7 Velocidad de sincronismo en función de la altura de eje ....................................... 32
4.8 Par mecánico en función de la altura de eje ............................................................ 33
4.9 Par mecánico en función de la intensidad ............................................................... 34
4.10 Par mecánico arranque/nominal en función de la intensidad de
arranque/nominal, potencia nominal ............................................................................... 36
4.11 Potencia e intensidad ................................................................................................. 37
4.12 Rendimiento en función de la potencia y el par mecánico ..................................... 39

4
5 Características mecánicas de los vehículos con motores de
combustión interna ........................................................................................ 40
5.3.1 Potencia y velocidad máxima ................................................................................. 44
5.3.2 Par mecánico máximo y velocidad máxima .......................................................... 45
6 Comparación entre MdI y motores de combustión interna ............... 47
7 Conclusiones ............................................................................................ 56
8 Referencias .............................................................................................. 58
5.1 Origen de los datos de los motores de combustión interna .................................... 40
5.2 Características de la base de datos de los vehículos ............................................... 41
5.3 Análisis de los vehículos con motor de combustión interna .................................. 44
6.1 Cálculo de la velocidad de un vehículo .................................................................... 47
6.2 Par mecánico .............................................................................................................. 48
6.3 Potencia ...................................................................................................................... 54
6.4 Par mecánico en función de la potencia .................................................................. 54

1 Introducción
1.1 Objetivo
El principal objetivo de este trabajo es analizar el par mecánico desarrollado por los
motores de inducción trifásicos, utilizando los datos que proporcionan diferentes
fabricantes en sus catálogos.
Además también se analiza una pequeña muestra de vehículos existentes hoy día en
el mercado para comparar el comportamiento del par mecánico desarrollado por los
motores de combustión y los motores de inducción trifásicos.
1.2 Antecedentes
La base de datos utilizada en este trabajo ha sido la misma que utilizó Bartomeu
Angulo para su Trabajo Fin de Grado: “Cálculo y análisis de los parámetros eléctricos de
un conjunto de motores de inducción”, del Grado de Ingeniería Eléctrica (URV), en el año
2013. Aunque el punto de partida es el mismo, los datos analizados y la metodología
utilizada en ambos trabajos son diferentes.
La base de datos de este análisis tiene las siguientes características:
2.206 máquinas de inducción trifásicas con rotor de jaula de ardilla.
Potencias nominales entre 0,05 a 1000 kW.
Tensiones: 400 V y 50 Hz o 460 V y 60 Hz.
Velocidades de sincronismo entre las 750 a 3600 rpm.
Fabricantes, ABB, CMG, Leroy Somer, Marelli, Rossi, Siemens y WEG.
En este trabajo se busca qué requisitos mecánicos son necesarios para poder utilizar
como elemento de tracción un motor de inducción trifásico en un vehículo, puesto que esta
solución es todavía muy minoritaria.
1.3 Alcance
En este trabajo se va analizar el par mecánico de los motores de inducción trifásicos
de jaula de ardilla en tres puntos de funcionamiento singulares: arranque, par máximo y
nominal, que por otro lado son los puntos donde el fabricante facilita información mediante
los catálogos. También se crea una base de datos con 100 motores para vehículos (52
gasolina, 36 diésel, 7 eléctricos, 3 GLP y 2 híbridos) correspondientes al año actual, 2017,
que permitirá el análisis entre los diferentes tipos de propulsores.
En este trabajo se han realizado las tareas siguientes:
Adaptación de la base de datos original, añadiendo el campo “altura de eje”.
Definición de las características de la base de datos utilizada para el estudio
de los motores de inducción trifásicos.
Análisis del par mecánico nominal en función de la potencia nominal.
Análisis del par mecánico en función de la velocidad de sincronismo.

6
Análisis del par mecánico en función de la velocidad nominal.
Análisis del par mecánico en función del número de pares de polos.
Análisis del par mecánico en función de la frecuencia nominal.
Análisis del par mecánico en función de la intensidad.
Análisis del rendimiento en función de la potencia nominal.
Definición de las características de la base de datos utilizada para el estudio
de los vehículos con motores de combustión interna y eléctricos
Estudio comparativo de los motores de inducción trifásicos respecto a
vehículos con motores de combustión interna.
Metodología para seleccionar un MdI en sustitución de un determinado
motor de explosión para un vehículo.
1.4 Estructura del trabajo
Este trabajo se ha divido en 8 capítulos. En el primer capítulo consta de una breve
introducción, explicando en que va a consistir el trabajo y cuáles son sus objetivos.
En el segundo capítulo se realizará una pequeña explicación del motor de inducción
trifásico, su constitución, principio de funcionamiento, características mecánicas y puntos
de funcionamiento.
El tercer capítulo explica la procedencia de los datos de partida que ofrecen los
fabricantes en sus catálogos, resume los principales parámetros que se van a tratar a lo
largo de este trabajo y presenta las principales características de la base de datos agrupando
y cuantificando diferentes parámetros.
En el cuarto capítulo se analiza la influencia de los parámetros de los motores de
inducción en el par mecánico, para diferentes puntos de funcionamiento.
En el quinto capítulo se realiza una breve introducción a los propulsores de los
vehículos actuales, ya que la implantación de los motores eléctricos es ínfima actualmente.
Se genera una base de datos, agrupando y cuantificándola en función de diferentes
parámetros. Y se compararan las características mecánicas de estos propulsores con las
generadas de los motores de inducción trifásicos.
En el sexto capítulo se analiza el comportamiento de los motores de inducción a
velocidades superiores a las nominales. Se comparan los motores de inducción trifásicos
con los motores de combustión interna. Se explica la metodología diseñada para la
selección de un MdI en sustitución de un propulsor de la base de datos de los vehículos.
Finalmente el capítulo 7 muestra las conclusiones del trabajo.

7
2 El motor de inducción trifásico, MdI
La máquina eléctrica que se va analizar en este trabajo es la Máquina de Inducción
trifásica (MdI) o máquina asíncrona.
Su funcionamiento es reversible: motor o generador, en todo este trabajo se analizará
su comportamiento como motor. Éste es el tipo de motores más utilizado en los procesos
industriales de todo el mundo para accionar todo tipo de cargas: bombas, ventiladores,
cintas transportadoras, aparatos elevadores, vehículos eléctricos, grúas, etc.
Es un motor de corriente alterna trifásica en el que la velocidad de giro del rotor es
ligeramente inferior que la velocidad del campo magnético que se genera en el estator,
conocida también como velocidad de sincronismo.
Se alimenta a partir de un sistema trifásico de tensiones, que es el suministro
convencional para todas las industrias.
Se pueden conectar directamente a una red trifásica, o bien mediante convertidores
electrónicos cuando se requiera un arranque suave o una regulación de velocidad del rotor.
2.1 Constitución del MdI
Este tipo de máquina consta básicamente de dos partes:
Estator: parte fija rodeada por la carcasa de la máquina. Presenta una forma
cilíndrica agujereada interiormente. La superficie interior es ranurada y
aloja el devanado trifásico de alimentación.
Rotor: pieza cilíndrica interior con ranuras en su superficie externa, donde
se ubican los conductores generalmente barras de Aluminio cortocircuitadas
en los extremos mediante dos anillos del mismo material.
Una de las ventajas de este tipo de motor es que no es necesario alimentar el rotor, su
tensión es inducida, lo que evita la existencia de anillos rozantes con escobillas, reduciendo
las averías y frecuencia de mantenimiento.
Figura 1. Motor inducción trifásico de jaula de ardilla, corte longitudinal a 90° [1]

8
Figura 2. Motor inducción trifásico de jaula de ardilla, estator y rotor [2]
Todos los fabricantes deben cumplir diferentes normativas que permiten estandarizar
los valores de: potencia, alturas de eje, valor eficaz y frecuencia de la tensión de
suministro, conexionado de los bornes, información de la placa de características,
información de catálogo, etc. Toda esta información permite que el usuario pueda adquirir,
para un mismo cometido, motores de diferentes fabricantes.
La placa de características de las máquinas de inducción presentan la información
básica de la misma: clase de rendimiento, clase de aislamiento, índice de protección, peso,
valor eficaz y frecuencia de la tensión para las conexiones estrella y triángulo, velocidad
nominal, potencia nominal, corriente nominal, factor de potencia nominal y rendimiento
nominal, tal como se observa para un ejemplo en la Figura 3.
Figura 3. Placa de características de un motor [3]
𝑃𝑚𝑒𝑐 á𝑛𝑖𝑐𝑎 = 𝑃𝑒𝑙é𝑐𝑡𝑟𝑖𝑐𝑎 · 𝜂 (2.1)
La potencia entregada en el eje del motor es la potencia mecánica o potencia útil
(2.1). Esta potencia es a la que se hace referencia cuando se habla de la potencia de un
motor, y es la que aparece en la placa de características para el punto de funcionamiento
nominal. La potencia consumida de la red de suministro a la que está conectado el motor es
la potencia eléctrica, o potencia absorbida.
Un esquema muy simplificado del proceso de conversión de potencia eléctrica a
potencia mecánica es el siguiente.
Figura 4. Transferencia de energía eléctrica a energía mecánica [4]

9
Generalmente estas máquinas no disponen de un sistema de refrigeración externo, en
general se utiliza un ventilador calado en el eje y situado dentro de la propia carcasa. Por
tanto el fluido utilizado mayoritariamente para la refrigeración es el aire.
Considerando motores con un mismo sistema de refrigeración, la potencia es
aproximadamente proporcional al volumen de dicho motor, pudiendo adoptar formas de
mayor radio y más cortas, o bien más alargadas con un radio menor.
Longitud y altura de eje son dos parámetros fundamentales cuando se diseña el
motor. Como las aplicaciones son diversas los fabricantes tienen un amplio catálogo que
abarca diferentes valores de estos parámetros.
Figura 5. Rotor, jaula de ardilla simple [5]
𝑉 = 𝜋 ∙ ℎ2 ∙ 𝑙 (2.2)
Donde:
V = volumen de la máquina eléctrica (mm3)
𝜋 = constante [3,1416]
h = altura de eje (mm)
l = longitud del eje (mm)
Para un mismo sistema de refrigeración, la potencia del motor depende linealmente
de su volumen, ecuación (2.2). En función del tipo de los requerimientos mecánicos (par y
velocidad) y del espacio disponible (en un vehículo el espacio para el motor puede ser muy
limitado), para una misma potencia se pueden construir motores más alargados y de menor
altura de eje, o viceversa.
2.1.1 Altura de eje
Es una medida que facilita el fabricante y sirve para saber cómo conectarse
mecánicamente con la carga. Cuando motor y carga presentan la misma altura de eje la
unión mecánica se realiza únicamente mediante un acoplamiento mecánico. En otras
situaciones hay que disponer de accesorios para igualar la altura de ejes, cajas de
engranajes, poleas, etc.

10
Figura 6. Altura de eje y placa de características [6]
La Figura 6. corresponde a una placa de características del fabricante ABB y las
cotas de un motor, en ella ABB da la información de la altura de eje, dentro del código
asignado a dicha máquina. Por tanto, es importante conocer la información de la placa de
características del motor (y a veces del catálogo) para seleccionar el motor adecuado a cada
aplicación.
2.1.2 Número de pares de polos
Este parámetro depende del diseño del devanado del estator. Los MdI
convencionales tienen entre 1 y 4 pares de polos. Este parámetro es fundamental puesto
que influye en la velocidad y el par que desarrollará el motor, como se explicará más
adelante, y también tiene influencia en la altura del eje. En general para una misma
potencia, los motores más rápidos (1 ó 2 pares de polos), tiene menos par y tienen una
altura de eje menor pero una longitud de eje mayor, de lo contrario una máquina con más
pares de polos, tiene una altura de eje mayor, puede ofrecer un par mecánico más elevado
pero su velocidad se verá reducida.
2.2 Principio de funcionamiento
Cuando el estator se alimenta por una red de tensión alterna trifásica y equilibrada,
circulan unas corrientes eléctricas por las bobinas del estator. Estas corrientes generan un
campo magnético giratorio a una velocidad de sincronismo, nS (2.3), que es función de la
frecuencia de la tensión de alimentación, f, y del número de pares de polos, p.
𝑛𝑠 =60 ∙ 𝑓
𝑝 (2.3)
El campo magnético giratorio induce unas tensiones en los conductores del rotor, que
como están cortocircuitados mediante 2 anillos, determinan unas corrientes en los
conductores del rotor. Como por dichos conductores circula una corriente y están
sometidos a un campo magnético, aparece sobre cada uno de ellos una fuerza mecánica
tangencial a la superficie cilíndrica del rotor, lo que determina un par y, si éste es superior
al par resistente, el rotor empieza a girar.

11
El rotor girará en el sentido del campo magnético hasta una velocidad muy cercana a
la de sincronismo. Esto es debido a que justo en el punto de sincronismo, cuando la
velocidad del campo magnético y el rotor son iguales, no se induce tensión, y por tanto no
existiría par motor.
En consecuencia, para este motor es muy importante conocer la diferencia entre
ambas velocidades, a la que se denomina deslizamiento, s (2.4).
𝑠 =𝑛𝑠 − 𝑛
𝑛𝑠 (2.4)
2.3 Característica mecánica del motor
El motor de inducción trifásico fue creado para realizar un trabajo constante en unas
condiciones determinadas, normalmente se define las necesidades de ese trabajo a realizar
y se busca el motor que mejor se adapte a las necesidades. Para ello los fabricantes
disponen de una amplia gama de motores. A continuación se definen unos puntos de
funcionamiento claves para el buen funcionamiento de los MdI.
La Figura 7.es muy útil para definir los puntos de funcionamiento claves.
Figura 7. Característica mecánica [7]
Arranque: es el instante en que se alimenta el motor y se inicia el proceso de la
puesta en marcha. En este punto el par del motor tiene que ser superior al par
resistente que ofrece la carga conectada al motor. Si no se cumple que TR ≤ T0 el
accionamiento no girará.
Zona inestable: en esta zona el motor no puede conseguir un punto de
funcionamiento estable en régimen permanente. Esta zona es atravesada durante
el proceso de puesta en marcha.
Zona estable: es la zona donde el motor puede trabajar en régimen permanente.
En esta zona se encuentra el punto de funcionamiento nominal, para el que ha
sido diseñada la máquina, y donde puede trabajar de forma ininterrumpida.

12
3 Base de datos utilizada de los MdI
3.1 Catálogos
Para realizar este trabajo se han utilizado datos procedentes de catálogos de
diferentes fabricantes de motores correspondientes al año 2010. Se han recopilado una
muestra de 2206 motores.
Los fabricantes de MdI seleccionados son: ABB, CMG, Leroy Somer, Marelli,
Rossi, Siemens y WEG.
Los catálogos contienen gran cantidad de datos sobre los motores. Los datos son
eléctricos, mecánicos y dimensionales, para realizar la elección del motor adecuado a cada
aplicación.
En el caso de este trabajo se han utilizado los siguientes datos facilitados por los
fabricantes en sus catálogos:
Fabricante
Potencia nominal, es la potencia útil del motor en condiciones nominales,
también conocida por potencia mecánica, se denomina la letra (PN) se mide
en vatios (W) o kilovatios (kW).
Altura de eje, indica una medida física del MdI, se denomina con la letra (h)
y de mide en milímetros (mm).
Velocidad sincronismo, es la velocidad de giro que tienen los campos
magnéticos en el estator y depende de frecuencia y número de polos de la
máquina, se denomina con las letras nS y se mide en revoluciones por
minuto (rpm) o (min-1
).
Velocidad nominal, es la velocidad real que tiene el rotor en condiciones
nominales, se denomina con la letra nN y se mide en revoluciones por
minuto (rpm) o (min-1
).
Polos, los fabricantes proporcionan el número de polos de los motores, pero
es común hablar de Pares de Polos que es la cantidad de pares de polos
magnéticos que se generan en el interior del motor, la cantidad de pares de
polos se define cuando se diseña el motor, se denomina con la letra (p) y se
mide con un número (1, 2, 3, 4...).
Par mecánico nominal, es el par que desarrolla el MdI cuando está en
condiciones nominales, se denomina con las letras (TN) y se mide en
Newton · metro (Nm).
Par arranque, es el par mecánico que ofrece el motor en el momento del
arranque, se denomina con las letras (T0) y se mide en Newton · metro
(Nm).
Par máximo, es el par mecánico máximo que puede ofrecer el motor, se
denomina con las letras(TM) y se mide en Newton · metro (Nm).
Par arranque / Par nominal, es la relación entre el par de arranque y el par
nominal, se denomina con las letras (T0/TN) y es adimensional.
Par máximo / Par nominal, es la relación entre el par máximo y el par
nominal, se denomina con las letras (TM/TN) y es adimensional

13
Conexión, es el tipo de conexión para la que se ha diseñado el motor, este
dato va ligado a la tensión de la red a la que se conectará. La conexión
puede ser en estrella (Y) o triángulo (∆).
Voltaje, es la tensión nominal para la que se ha diseñado el MdI, se mide en
voltios (V).
Frecuencia, es la frecuencia a la que oscila la tensión de la red eléctrica a la
que se ha diseñado el MdI, se denomina con la letra (f) y se mide en hercios
(Hz).
Intensidad nominal, es el corriente eléctrico que consume el motor en
condiciones nominales, se denomina con las letras (IN) y se mide en
amperios (A).
Intensidad arranque, es el corriente eléctrico que consume el motor en el
momento del arranque, se denomina con las letras (I0) y se mide en
amperios (A).
Intensidad arranque / Intensidad nominal, es la relación entre la intensidad
en el momento del arranque y la intensidad nominal, se denomina con las
letras (I0/IN) y es adimensional.
Rendimiento o eficiencia, es la relación entre la potencia útil que entrega en
el eje del motor y la potencia absorbida de la red eléctrica, se denomina con
la letra (η) y se calcula en %.

14
3.2 Características de la base de datos de los MdI
En este apartado se presenta cuantitativamente la base de datos desglosándola en
diferentes grupos.
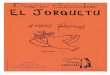
Agrupación según el fabricante:
Figura 8. nº de motores por fabricantes
Fabricante %
ABB 25,97
CMG 2,13
Leroy Somer 15,82
Marelli 9,34
Rossi 8,93
Siemens 20,58
WEG 17,23
Total 100,00
Tabla 1. Repartición por fabricantes
Agrupación según la potencia nominal:
Figura 9. nº de motores por rango de potencia nominal
Potencia PN (kW) %
PN ≤ 1 11,38
1 < PN ≤ 10 27,11
10 < PN ≤ 100 36,45
PN > 100 25,07
Total 100,00
Tabla 2. Repartición por tramos de potencias
573
47
349
206 197
454380
ABB CMG Leroy Somer Marelli Rossi Siemens WEG
Un
ida
des
251
598
804
553
P ≤ 1 1 < P ≤ 10 10 < P ≤ 100 P > 100
Un
ida
des

15
Agrupación según el par mecánico nominal:
Figura 10. nº de motores por rango de par mecánico nominal
Par nominal TN (Nm) %
TN ≤ 1 1,13
1 < TN ≤ 10 15,14
10 < TN ≤ 100 31,55
100 < TN ≤ 1000 33,73
TN > 1000 18,45
Total 100,00
Tabla 3. Repartición por tramos de par mecánico nominal
Agrupación según la altura de eje:
Figura 11. nº de motores por rango de altura de eje
Altura de eje h (mm) %
h ≤ 100 21,26
100 < h ≤ 200 34,95
200 < h ≤ 300 19,85
300 < h ≤ 400 22,03
h > 400 1,90
Total 100,00
Tabla 4. Repartición por tramos de altura de eje
25
334
696 744
407
T ≤ 1 1 < T ≤ 10 10 < T ≤ 100 100 < T ≤ 1000 T > 1000
Un
ida
des
469
771
438486
42
h ≤ 100 100 < h ≤ 200 200 < h ≤ 300 300 < h ≤ 400 h > 400
Un
ida
des

16
Agrupación según la intensidad nominal:
Figura 12. nº de motores por rango de intensidad nominal
Intensidad nominal IN (A) %
IN ≤ 1 4,81
1 < IN ≤ 10 25,25
10 < IN ≤ 100 37,22
100 < IN ≤ 1000 30,01
IN > 1000 2,72
Total 100,00
Tabla 5. Repartición por tramos de intensidad nominal
Agrupación según la relación entre la intensidad de arranque/nominal:
Figura 13. nº de motores por rango de intensidad de arranque/nominal
I arranque /I nominal (pu) %
I0/IN ≤ 2 1,13
2 < I0/IN ≤ 4 9,56
4 < I0/IN ≤ 6 22,08
6 < I0/IN ≤ 8 60,92
8 < I0/IN ≤ 10 6,30
I0/IN > 10 0,00
Total 100,00
Tabla 6. Repartición por tramos de intensidad arranque/nominal
106
557
821
662
60
I ≤ 1 1 < I ≤ 10 10 < I ≤ 100 100 < I ≤ 1000 I > 1000
Un
ida
des
25
211
487
1344
1390
Io/I ≤ 2 2 < Io/I ≤ 4 4 < Io/I ≤ 6 6 < Io/I ≤ 8 8 < Io/I ≤ 10 Io/I > 10
Un
idad
es

17
Agrupación según la relación entre el par máximo/nominal:
Figura 14. nº de motores por rango de par máximo/nominal
T máxima /T nominal (pu) %
TM/TN ≤ 1,5 0,41
1,5 < TM/TN ≤ 3 74,43
3 < TM/TN ≤ 4,5 24,61
4,5 < TM/TN ≤ 6 0,54
TM/TN > 6 0,00
Total 100,00
Tabla 7. Repartición por tramos de par máximo/nominal
Agrupación según la relación entre el par de arranque/nominal:
Figura 15. nº de motores por rango de par arranque/nominal
T arranque /T nominal (pu) %
T0/TN ≤ 1,5 5,44
1,5 < T0/TN ≤ 3 85,72
3 < T0/TN ≤ 4,5 8,57
4,5 < T0/TN ≤ 6 0,27
T0/TN > 6 0,00
Total 100,00
Tabla 8. Repartición por tramos de par arranque/nominal
9
1642
543
12 0
TM/T ≤ 1,5 1,5 < TM/T ≤ 3 3 < TM/T ≤ 4,5 4,5 < TM/T ≤ 6 TM/T > 6
Un
idad
es
120
1891
1896 0
To/T ≤ 1,5 1,5 < To/T ≤ 3 3 < To/T ≤ 4,5 4,5 < To/T ≤ 6 To/T > 6
Un
idad
es

18
Agrupación según en número de par de polos:
Número de pares de
Polos
Frecuencia
(Hz)
nS
(rpm)
Cantidad de
motores
1 60 3600 131
50 3000 514
2 60 1800 132
50 1500 533
3 60 1200 109
50 1000 428
4 60 900 75
50 750 284
Total 2206
Tabla 9. nº de motores por rango de velocidades de sincronismo
En la tabla 9. se muestra el número de par de polos, las dos frecuencias nominales
para las que están diseñados los motores, la velocidad de sincronismo y el recuento de
motores por los grupos realizados.
Figura 16. nº de motores por rango de par de polos
Pares de Polos (p) %
1 par de polos 29,24
2 pares de polos 30,15
3 pares de polos 24,34
4 pares de polos 16,27
Total 100,00
Tabla 10. Repartición por tramos de pares polos
Figura 17. Par mecánico desarrollado según los pares de polos de todos los motores
645 665
537
359
1 par de polos 2 pares de polos 3 pares de polos 4 pares de polos
Un
ida
des
0
2000
4000
6000
8000
10000
12000
0 1 2 3 4
TN
(Nm
)
Pares de polos

19
Agrupando los motores según la velocidad de sincronismo:
Figura 18. nº de motores por rango de velocidad de sincronismo
Velocidad sincronismo (rpm) %
750 12,87
900 3,40
1000 19,40
1200 4,94
1500 24,16
1800 5,98
3000 23,30
3600 5,94
Total 100,00
Tabla 11. Repartición por tramos de velocidad de sincronismo
La velocidad de sincronismo de un motor depende de:
El número de par de polos
La frecuencia de alimentación.
Debido a estas dos variables podemos encontrarnos dos motores con los mismos
pares de polos y desarrollar una velocidad nS distinta, debido a que la frecuencia de
alimentación es de 50 o 60 Hz.
284
75
428
109
533
132
514
131
750 900 1000 1200 1500 1800 3000 3600
Un
ida
des
nS (rpm)

20
Figura 19. Par mecánico y velocidad de sincronismo de todos los motores
Agrupación según el deslizamiento:
Figura 20. nº de motores por rango de deslizamiento
Deslizamiento s (pu) %
s ≤ 0,05 86,67
0,05 < s ≤ 0,10 11,51
0,10 < s ≤ 0,15 1,63
s > 0,15 0,18
Total 100,00
Tabla 12. Repartición por tramos de velocidad de sincronismo
0
2000
4000
6000
8000
10000
12000
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
ns (rpm)
50 Hz
1759 motores
0500
1000150020002500300035004000
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
ns (rpm)
60 Hz
447 motores
1912
25436 4
s ≤ 0,05 0,05 < s ≤ 0,10 0,10 < s ≤ 0,15 s > 0,15
Un
ida
des

21
4 Análisis de los Motores de Inducción Trifásicos MdI
En este apartado se analiza las variables que afectan al par mecánico desarrollado por
de los motores de inducción trifásicos.
Para realizar el análisis de par mecánico de los motores de inducción trifásicos.
El Par mecánico es el resultado de dos variables, la potencia y la velocidad a las que se
hace trabajar el motor.
La ecuación (4.1) se va a justificar en diferentes casos a lo largo de este trabajo.
𝑃𝑚𝑒𝑐 = T · (4.1)
Donde: Pmec = Potencia mecánica del motor en (W)
T = Par mecánico desarrollado por el motor en (Nm)
ω = Velocidad del motor en (rad/s)
Figura 21. Par mecánico nominal y Potencia nominal de todos los motores
Promedio 93 kW y 646 Nm
En la Figura 21, se muestra la distribución del par mecánico nominal en función de la
potencia nominal de cada uno de los motores de la base de datos, el punto rojo es la media
aritmética del conjunto de todos los motores.
Uniendo diferentes puntos de la Figura 21, se intuye unos comportamientos lineales,
estos comportamientos son debidos a la velocidad que es una variable que afecta al
comportamiento de los motores.
93, 646
0
2000
4000
6000
8000
10000
12000
0 200 400 600 800 1000 1200
TN
(Nm
)
Potencia (kW)
Motor
Promedio
Todos los motores

22
4.1 Par mecánico en función de la potencia, velocidad de sincronismo
A continuación se agrupan los motores de la base en grupos según su velocidad de
sincronismo. Esta velocidad de sincronismo nS, es la velocidad que gira el campo
magnético en condiciones nominales.
Esta velocidad de sincronismo depende de un parámetro y una variable:
El parámetro, es el número de pares de polos. Este parámetro no se puede modificar,
se asigna en el momento de diseño/fabricación. Depende de la posición y montaje de las
bobinas del estator y construcción de la jaula de ardilla del rotor.
La variable, es la frecuencia de la red eléctrica para la que se ha diseñado la
conexión. Aunque la red de suministro es fija, 50 o 60 Hz, dependiendo de la región, existe
la posibilidad de utilizar convertidores electrónicos que pueden modular la frecuencia a la
que se desea alimentar el motor y obtener una amplia regulación de la velocidad de giro del
rotor. Para este análisis, la frecuencia es la nominal para la que fue diseñado cada motor.
Aproximadamente un 75% de los motores de este estudio están diseñados para una
conexión de 50 Hz, ya que es la utilizada en Europa, y el 25% del resto de motores de este
estudio están diseñados para una conexión de 60 Hz, ya que es otra frecuencia
estandarizada en otras regiones del mundo.
Figura 22. Par mecánico nominal en función de la potencia nominal agrupando la velocidad de sincronismo
Velocidad de sincronismo
nS (rpm)
Ecuación
nS = 750 TN = 12,85·PN + 2,620
nS = 900 TN = 10,71·PN + 2,569
nS = 1000 TN = 9,612·PN + 2,215
nS = 1200 TN = 8,028·PN + 1,628
nS = 1500 TN = 6,403·PN + 1,587
nS = 1800 TN = 5,362·PN + 0,426
nS = 3000 TN = 3,198·PN + 0,778
nS = 3600 TN = 2,668·PN + 0,508
Tabla 13. Ecuaciones del par mecánico nominal en función de la potencia nominal agrupando los motores según la
velocidad de sincronismo
En la Tabla 13, se muestran las ecuaciones de las rectas correspondientes a cada una
de las velocidades de sincronismo de la Figura 22. Para una misma potencia a más
pendiente más par mecánico se puede obtener pero se obtiene una velocidad de
sincronismo menor.
0
2000
4000
6000
8000
10000
12000
0 200 400 600 800 1000 1200
TN
(Nm
)
Potencia (kW)
750 900 1000 1200 1500 1800 3000 3600

23
En la Figura 22, se muestran el par mecánico en función a la potencia nominal de
todos los motores agrupándolos según la velocidad de sincronismo para la que se han
construido cada uno de ellos.
Para una misma potencia nominal se puede disponer de 8 velocidades de
sincronismo diferentes y 8 grupos de par mecánico nominal. El par mecánico nominal es
aproximadamente similar entre todos los motores de cada grupo.
La base de datos no dispone de todos los grupos de nS ni TN a partir de cierto rango
de potencia. Para pequeñas potencias es más fácil tener variedad de motores, para
potencias elevadas es difícil disponer de variedad de motores.
Por ejemplo, el motor más potente de:
nS = 900 rpm entrega 330 kW
nS = 1200 rpm entrega 450 kW
Mientras que solo 7 motores de la base de datos entregan 1000 kW y solo se
disponen para nS de 1000, 1500 y 3000 rpm.
La relación entre la velocidad nN, el par TN y la potencia PN se obtienen aplicando la
ecuación (4.1). La velocidad nominal nN (rpm), para poder utilizarla en la ecuación (4.1)
debe de expresarse en (rad/s). En la ecuación (4.2) aparece la relación entre ω y n.
(rad/s) =n rpm
60∙ 2π (4.2)

24
4.2 Par mecánico en función de la velocidad nominal, potencia nominal
En este punto se agrupan todos los motores disponibles en la base de datos para
diferentes potencias y se ha obtenido las siguientes figuras.
Figura 23. Par mecánico en función de la velocidad nominal de los motores de:
1,1 kW [63 motores]; 11 kW [98 motores]; 110 kW [63 motores]; 1000 kW [7 motores]
Potencia nominal Ecuación
PN = 1,1 kW TN = 10133·n-0,99
PN = 11 kW TN = 10411·n-0,99
PN = 110 kW TN = 106·n-1
PN = 1000 kW TN = 107·n-1
Tabla 14. Ecuaciones de las aproximaciones polinómicas de las líneas de tendencia del par mecánico nominal en
función de la velocidad del rotor y agrupando los motores según la potencia nominal
En la Figuras 23, se ha insertado una línea de tendencia y se han obtenido las
ecuaciones de las diferentes líneas de tendencia. Estas ecuaciones se pueden ver en la
Tabla 14, define una hipérbola.
0
5
10
15
20
25
30
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
nN (rpm)
PN = 1,1 kW
0
50
100
150
200
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
nN (rpm)
PN = 11 kW
0200400600800
1000120014001600
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
nN (rpm)
PN = 110 kW
0
2000
4000
6000
8000
10000
12000
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
nN (rpm)
PN = 1000 kW

25
El comportamiento es prácticamente idéntico, la ecuación que definen las diferentes
figuras son la misma ecuación desplaza en los dos ejes para diferentes potencia nominales
de los motores.
Aunque no se dispone de la misma cantidad de motores para cada potencia, se puede
ver que cuanto más potentes son los motores más se aproximan todos a la velocidad de
sincronismo, esta última observación se irá comprobando a lo largo de este trabajo.
En el grupo de 1,1 kW para cada velocidad de sincronismo se aprecia una dispersión
entre sus motores, a medida que aumenta la potencia de los motores, la dispersión es
menor.
4.3 Par mecánico en función de la velocidad nominal, frecuencia y deslizamiento
En este punto se agrupan todos los motores disponibles en la base de datos para las
dos frecuencias nominales.
Figura 24. Par mecánico nominal en función de la velocidad nominal agrupando los motores según la
frecuencia nominal para la que han sido diseñados.
La Figura 24, muestra la distribución del par mecánico nominal en función de la
velocidad nominal de todos los motores, separándolos en dos grupos según si su frecuencia
nominal es de 50 o 60 Hz.
Para las dos frecuencias, los motores tienen el mismo comportamiento, a más
velocidad nominal menos par mecánico nominal se puede obtener. Se justifica la ecuación
(4.1).
Se puede ver en la Figura 24, que a más pares de polos, la dispersión que existe en la
velocidad nominal es menor que la que se produce en los motores con menos pares de
polos. También se extraer de la misma figura que los motores que ofrecen más par
mecánico nominal, en cada grupo con el mismo número de pares de polos, más se
aproximan a su velocidad de sincronismo.
0
2000
4000
6000
8000
10000
12000
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
n (rpm)
50 Hz
1759 motores
0
1000
2000
3000
4000
0 500 1000 1500 2000 2500 3000 3500 4000
TN
(Nm
)
nN (rpm)
60 Hz
447 motores

26
En la Figura 24, en el grupo de motores de 50 Hz, aparece un punto que se debe
analizar con detalle. Es el punto cerca de la velocidad nominal de 2500 rpm. Justamente
este punto es el de 2505 rpm y 1,4 Nm. Se concentran dos motores en este punto, son del
fabricante ABB con los códigos (M3BA 71 A y M3BP 71 A). Los dos motores tiene una
velocidad de sincronismo de 3000 rpm, una potencia nominal de 0,37 kW y un par
mecánico nominal de 1,4 Nm.
El motor con el código (M3BP 71 A) parece en el catálogo ABB 2010 del año 2010
en la pág. 34. Y el motor con el código (M3BA 71 A) aparece en el catálogo ABB2 2010
del año 2010 en la pág. 96.
Los dos motores son del grupo de motores de menos de 1kW de potencia y en
general este tipo de motores sufren complicaciones en el proceso de diseño y construcción
por el reducido espacio que ocupan. Otro problema que también sufren los motores de
poca potencia es el bajo rendimiento que ofrecen.
Este puto que se analiza (2505 rpm, 1,4 Nm), el deslizamiento que tiene estos dos
motores es muy elevado s = 0,165, es el peor dato de entre todos los motores de la base de
datos, el segundo dato peor es un deslizamiento de s = 0,130 que corresponde a un motor
también del fabricante ABB con el código (M3AA 71 C) con una potencia nominal de
0,37 kW.
Figura 25. Par mecánico nominal en función del deslizamiento.
Promedio deslizamiento 0,028 y 645 Nm
En la Figura 25, se puede apreciar como el par mecánico influye en deslizamiento,
los motores con mayor par se aproximan a su velocidad de sincronismo y por lo tanto el
deslizamiento es inferior.
0,028, 645
0
2000
4000
6000
8000
10000
12000
0,000 0,050 0,100 0,150 0,200
TN
(Nm
)
Deslizamiento s
Motor
Promedio
Todos los motores

27
4.4 Par mecánico arranque/nominal en función de la velocidad
nominal/sincronismo, potencia nominal
En este punto se agrupan los motores por rangos de potencia nominal y se analiza el
par de arranque/nominal en función de la velocidad nominal/sincronismo.
Figura 26. T0/TN en función de nN/nS agrupando los motores en:
Todos los motores; PN ≤ 1 kW [251 motores]; 1 kW < PN ≤ 10 kW [598 motores]; 10 kW< PN ≤ 100 kW [804 motores];
PN > 100 kW [553 motores]
0,97, 2,35
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
T0
/ TN
(pu
)
n/nS (pu)
Motor
Promedio
Todos los motores
0,93, 2,50
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
T0
/ TN
(pu
)
n/nS (pu)
Motor
Promedio
PN ≤ 1 kW
0,96, 2,43
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
T0
/ TN
(pu
)
n/nS (pu)
Motor
Promedio
1 kW < PN ≤ 10 kW
0,98, 2,40
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
T0
/ TN
(pu
)
n/nS (pu)
Motor
Promedio
10 kW < PN ≤ 100 kW
0,99, 2,11
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
T0
/ TN
(pu
)
nN/nS (pu)
Motor
Promedio
PN > 100 kW

28
Potencia nominal Promedios
Todos los motores 0,972 nN/nS y 2,348 T0/TN
PN ≤ 1 kW 0,926 nN/nS y 2,503 T0/TN
1 kW < PN ≤ 10 kW 0,961 nN/nS y 2,429 T0/TN
10 kW < PN ≤ 100 kW 0,982 nN/nS y 2,404 T0/TN
PN > 100 kW 0,992 nN/nS y 2,110 T0/TN
Tabla 15. Promedios de nN/nS y T0/TN agrupando los motores según la potencia nominal
Analizando los valores promedio de la Tabla 15, la relación entre velocidad
nominal/sincronismo, a mayor es la potencia de los motores más se aproximan a la
velocidad de sincronismo.
Si se analiza la relación entre el par de arranque/nominal, los motores de poca
potencia ofrecen una mayor relación entre T0/TN, el valor promedio va disminuyendo
cuanto más aumenta la potencia de los motores.
Los valores promedio de esta relación como mínimo siempre son superiores a 2
veces el par mecánico nominal.
En el caso de los extremos de la Figura 26, con relación a T0/TN, se encuentra la
máxima relación en un motor de poca potencia, inferior a 1 kW, que ofrece 5,76 veces el
par nominal en el momento del arranque. Los motores que ofrecen menos relación entre
T0/TN, son 5 motores que ofrecen 0,9 veces el par mecánico nominal en el momento del
arranque, estos 5 motores son de unas potencias nominales comprendidas entre los 700 y
1000 kW. Estos 5 motores no podrían arrancar con un par mecánico resistente igual al
nominal, se debería estudiar la aplicación con detenimiento antes de seleccionar estos
motores.
Un dato de cualquier motor que se debe de tener en cuenta en el momento de la
elección es la necesidad del T0 para la aplicación en la que se va a utilizar.
Si el TResistente, TR, es superior al T0 el motor no podrá arrancar.
En la Figura 27, se muestra diferentes curvas de demanda dependiendo de la carga.
Figura 27.Característica mecánica del par resistente [8]
1- TR = K , Máquinas de elevación, cintas transportadoras, compresores y bombas de
pistón
2- TR=K·n, Prensas, generadores con excitación independiente
3- TR=K·n2 , Ventiladores, compresores y bombas centrífugas
4- TR=K/n , Batidoras y bobinadoras
Donde K es una constante

29
4.5 Par mecánico máximo/nominal en función de la velocidad nominal/sincronismo,
potencia nominal
En este punto se agrupan los motores por rangos de potencia nominal y se analiza el
par máximo/nominal en función de la velocidad nominal/sincronismo.
Figura 28.TM/TN en función de nN/nS agrupando los motores en:
Todos los motores; PN ≤ 1 kW [251 motores];1 kW< PN ≤ 10 kW [598 motores];
10 kW < PN ≤ 100 kW [804 motores];PN >100 kW [553 motores]
0,97, 2,77
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
N(p
u)
nN/nS (pu)
Motor
Promedio
Todos los motores
0,93, 2,67
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
N(p
u)
nN/nS (pu)
Motor
Promedio
PN ≤ 1 kW
0,96, 2,91
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
N(p
u)
nN/nS (pu)
Motor
Promedio
1 kW < PN ≤ 10 kW
0,98, 2,79
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
N(p
u)
nN/nS (pu)
Motor
Promedio
10 kW < PN ≤ 100 kW
0,99, 2,61
0
1
2
3
4
5
6
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
N(p
u)
nN/nS (pu)
Motor
Promedio
PN > 100 kW

30
Potencia nominal Promedios
Todos los motores 0,972 nN/nS y 2,765 TM/TN
PN ≤ 1 kW 0,926 nN/nS y 2,669 TM/TN
1 kW < PN ≤ 10 kW 0,961 nN/nS y 2,909 TM/TN
10 kW < PN ≤ 100 kW 0,982 nN/nS y 2,791 TM/TN
PN > 100 kW 0,992 nN/nS y 2,614 TM/TN
Tabla 16. Promedios de nN/nS y TM/TN agrupando los motores según la potencia nominal
Analizando los valores promedio de la Tabla 16 y la Figura 28, con respecto a la
relación entre velocidad nominal/sincronismo, es el mismo comportamiento que el de la
Tabla 15, a mayor es la potencia de los motores más se aproximan a la velocidad de
sincronismo.
Analizando los valores de TM/TN de la Tabla16 y la Figura 28, se observa que
debería cumplir un patrón. Los motores de poca potencia debería ser los que ofrecieran la
relación más grande entre TM/TN, (en el punto anterior de T0/TN, sí que se cumplía), pero
para estos parámetros no se cumple. Se vuelve a encontrar otro caso en que los motores de
potencia inferior a 1 kW no son muy fiables, aparte de tener una variación importante de
los valores de TM/TN entre todos los motores de ese rango de potencias. A más potentes
son los motores más homogéneo son sus resultados de TM/TN.
El valor máximo de esta relación es TM/TN = 5,4 pu, y corresponde a dos motores,
uno de potencia nominal de 0,09 kW y nS 3000 rpm, el otro motor de una potencia nominal
de 2,2 kW y nS 3600 rpm .
La Figura 28, es muy parecida al comportamiento obtenido en la Figura 26, existe
una pequeña diferencia, no hay ningún motor que ofrezca una relación TM/TN inferior a
1 pu, el primer valor de la relación TM/TN toma un valor de 1,1 pu. El valor de TM siempre
es superior al TN.

31
4.6 Par mecánico máximo/Par arranque en función de velocidad
nominal/sincronismo, potencia nominal
En este punto se agrupan los motores por rangos de potencia nominal y se analiza el
par máximo/arranque en función de la velocidad nominal/sincronismo.
Figura 29. TM/T0 en función de nN/nS agrupando los motores en:
Todos los motores; PN ≤ 1 kW [251 motores];1 kW < PN ≤ 10 kW [598 motores]; 10 kW < PN ≤ 100 kW [804 motores];
PN > 100 kW [553 motores]
0,97, 1,21
0
1
2
3
4
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
0(p
u)
nN/nS (pu)
Motor
Promedio
Todos los motores
0,93, 1,09
0
1
2
3
4
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
0(p
u)
nN/nS (pu)
Motor
Promedio
PN ≤ 1 kW
0,96, 1,23
0
1
2
3
4
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
0(p
u)
nN/nS (pu)
Motor
Promedio
1 kW < PN ≤ 10 kW
0,98, 1,18
0
1
2
3
4
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
0(p
u)
nN/nS (pu)
Motor
Promedio
10 kW < PN ≤ 100 kW
0,99, 1,30
0
1
2
3
4
0,820 0,840 0,860 0,880 0,900 0,920 0,940 0,960 0,980 1,000
TM
/ T
0(p
u)
nN/nS (pu)
Motor
Promedio
PN > 100 kW

32
Potencia nominal Promedios
Todos los motores 0,972 nN/nS y 1,211 TM/T0
PN ≤ 1 kW 0,926 nN/nS y 1,086 TM/T0
1 kW < PN ≤ 10 kW 0,961 nN/nS y 1,227 TM/T0
10 kW < PN ≤ 100 kW 0,982 nN/nS y 1,176 TM/T0
PN > 100 kW 0,992 nN/nS y 1,299 TM/T0
Tabla 17. Promedios de nN/nS y TM/T0 agrupando los motores según la potencia nominal
El comportamiento observado en los valores promedio de la relación entre nN/nS de
la Tabla 17 y la Figura 29, es el mismo comportamiento que se observa en las Tablas 15 y
16, a mayor es la potencia de los motores más se aproximan a la velocidad de sincronismo.
El comportamiento de TM/T0 de la Tabla 17, para la potencia de menos de 1 kW, es
muy plano no hay una variación en el comportamiento de todos los motores de ese rango
de potencia.
Se aprecia un cambio significativo en la relación de TM/T0 para las potencias
superiores a 100 kW, en este rango de potencias la variación entre los resultados
individuales de TM/T0 sí que es más notorio, localizando en este rango de potencias la
relación más elevada de todos los motores de la base de datos, siendo TM/T0 = 3,33 pu en
un motor de potencia nominal de 800 kW y 3000 rpm.
También se observa que se disponen de motores que su par mecánico de arranque es
superior al par mecánico máximo. Se han cuantificado 167 motores que ofrecen un par
mecánico de arranque superior al par mecánico máximo. Con un valor medio de
TM/T0 = 1,211 pu y un mínimo de TM/T0 = 0,44 pu en un motor ABB de 0,37 kW.
4.7 Velocidad de sincronismo en función de la altura de eje
Figura 30. nS en función de la altura de eje para todos los motores
En la Figura 30, se disponen todos los motores de la base de datos. Entre todos los
fabricantes cubren todas las alturas de eje y rangos de velocidades de sincronismo. Se
dispone en el mercado una amplia variedad de motores que permiten adaptarse a todas las
posibilidades de demanda. Uniendo los puntos de Figura 30, con líneas horizontales y
verticales se crea una cuadricula, se puede ver que existen unos valores estandarizados de
altura de eje y velocidad nS.
0500
1000150020002500300035004000
0 50 100 150 200 250 300 350 400 450 500
ns(r
pm
)
Altura de eje (mm)Todos los motores

33
4.8 Par mecánico en función de la altura de eje
En este punto se analiza el par mecánico nominal en función de la altura de eje. Se
puede observar una amplia variación del par disponible con la misma altura de eje.
Figura 31. Par mecánico nominal en función de la altura de eje y potencia nominal en función de la altura de eje
Grupos Ecuación de la
aproximación
Par mecánico nominal TN TN = 8·10-8·H4,040
Potencia nominal PN PN = 10-8·H4,027
Tabla 18. Ecuaciones de las aproximaciones polinómincas a las líneas de tendencia del pare mecánico nominal y la
potencia nominal en función de la altura de eje.
En la Figura 31, se muestra una dispersión considerable a partir de cierta altura de
eje, la dispersión afecta al par mecánico nominal y a la potencia nominal.
En la Figura 32, se agrupan los motores según su velocidad de sincronismo, la
dispersión se reparte entre los diferentes grupos de velocidades de sincronismo.
Aún es considerable la dispersión que se observa en la Figura 32, pero sí que se
puede constatar que, a menor número de par de polos, menos dispersión existe en el par
mecánico nominal para algunas alturas de eje concretas.
En la Tabla 18 se muestra la aproximación a la línea de tendencias que define una
función polinómica de cuarto grado (h4) lo que provoca un incremento muy rápido del par
mecánico por poco que incrementa la altura de eje.
0
2000
4000
6000
8000
10000
12000
0 100 200 300 400 500 600
TN
(Nm
)
Altura de eje (mm)
Todos los motores
0
200
400
600
800
1000
1200
0 100 200 300 400 500 600
PN
(kW
)
Altura de eje (mm)
Todos los motores

34
Figura 32.Par mecánico nominal en función de la altura de eje y agrupándolos según la velocidad de sincronismo de:
nS=750 rpm [284 motores ]; nS=1000 rpm [428 motores]; nS=1500 rpm [533 motores]; nS=3000 rpm [514 motores]
4.9 Par mecánico en función de la intensidad
Figura 33. Par mecánico nominal en función de la intensidad nominal
Promedio 161 A y 646 Nm
0
2000
4000
6000
8000
10000
12000
0 100 200 300 400 500 600
TN
(Nm
)
Altura de eje (mm)
Motores nS = 750 rpm
0
2000
4000
6000
8000
10000
12000
0 100 200 300 400 500 600
TN
(Nm
)
Altura de eje (mm)
Motores nS = 1000 rpm
0
2000
4000
6000
8000
10000
12000
0 100 200 300 400 500 600
TN
(Nm
)
Altura de eje (mm)
Motores nS = 1500 rpm
0
2000
4000
6000
8000
10000
12000
0 100 200 300 400 500 600
TN
(Nm
)
Altura de eje (mm)
Motores nS = 3000 rpm
161, 646
0
2000
4000
6000
8000
10000
12000
0 200 400 600 800 1000 1200 1400 1600 1800
TN
(Nm
)
IN (A)
Motor
Promedio
Todos los motores

35
La Figura 33, tiene el mismo comportamiento que la Figura 21 y 22.
Las Figuras 21 y 22, hacen referencia al par mecánico nominal en función de la
potencia nominal. Como en la Figura 33, la variable es la intensidad nominal, las dos
gráficas se comportan de la misma forma ya que la potencia nominal es producto de la
intensidad nominal.
Figura 34. Par de arranque en función de la intensidad de arranque
Promedio 1121 A y 1292 Nm
En la Figura 34, se esperaba ver un comportamiento lineal de todos los puntos, ya
que en el momento del arranque la velocidad es 0 rpm.
Lo que influye en no tener una sola línea, es la cantidad de pares de polos que tiene
cada motor, aunque no hay una línea perfectamente definida sí que se intuyen diferentes
líneas de pendientes, tantas como grupos de pares de polos hay en la base de datos.
Para una misma I0 existe diferentes pares mecánicos, este comportamiento es debido
a que para obtener más par mecánico de arranque el motor tiene que tener más pares de
polos, al disponerse de más pares de polos implica más intensidad.
1121, 1292
02000400060008000
1000012000140001600018000
0 2000 4000 6000 8000 10000 12000 14000
T0
(Nm
)
I0 (A)
Motor
Promedio
Todos los motores

36
4.10 Par mecánico arranque/nominal en función de la intensidad de
arranque/nominal, potencia nominal
En este punto se agrupan los motores por rangos de potencia nominal y se analiza el
par de arranque/nominal en función de la intensidad arranque/nominal.
Figura 35. Par de arranque/nominal en función de la intensidad de arranque/nominal agrupando los motores en:
Todos los motores; PN ≤ 1kW [251 motores]; 1 kW < PN ≤ 10 kW [598 motores]; 10 kW < PN ≤ 100 kW [804 motores];
PN > 100kW [553 motores]
6,3, 2,3
01234567
0 2 4 6 8 10
T0
/ TN
(pu
)
I0 / IN (pu)
Motor
Promedio
Todos los motores
4,0, 2,5
01234567
0 2 4 6 8 10
T0
/ TN
(pu
)
I0 / IN (pu)
Motor
Promedio
PN ≤ 1 kW
6,0, 2,4
01234567
0 2 4 6 8 10
T0
/ TN
(pu
)
I0 / IN (pu)
Motor
Promedio
1 kW < PN ≤ 10 kW
6,8, 2,4
01234567
0 2 4 6 8 10
T0
/ TN
(pu
)
I0 / IN (pu)
Motor
Promedio
10 kW < PN ≤ 100 kW
7,0, 2,1
01234567
0 2 4 6 8 10
T0
/ TN
(pu
)
I0 / IN (pu)
Motor
Promedio
PN > 100 kW

37
Potencia nominal Promedios
Todos los motores 6,3I0/IN y 2,348 T0/TN
PN ≤ 1 kW 4,0 I0/IN y 2,503 T0/TN
1 kW < PN ≤ 10 kW 6,0 I0/IN y 2,429 T0/TN
10 kW < PN ≤ 100 kW 6,8 I0/IN y 2,404 T0/TN
PN > 100 kW 7,0 I0/IN y 2,110 T0/TN
Tabla 19. Promedios de I0/IN y T0/TN agrupando los motores según la potencia nominal
Analizando los valores promedios de I0/IN de la Tabla 19 y la Figura 35, se observa que los
motores de potencias superiores a 100 kW, tienen menor dispersión entre ellos.
Localizando el valor medio más elevado I0/IN en este grupo (PN > 100 kW) llegando a
superar 7 veces la intensidad nominal.
4.11 Potencia e intensidad
Figura 36.Potencia nominal en función de la intensidad nominal
Promedio 161 A y 93 kW
En la Figura 36, se muestra en varios puntos, que para una misma potencia existe una
dispersión en el consumo de intensidad, este efecto lo producen los pares de polos del
motor y afecta al par mecánico nominal que ofrecen los motores.
Para una misma potencia se pueden encontrar unos motores con diferentes número
de pares de polos que depende de si son (3 o 4 pares de polos) pueden ofrecen más par
mecánico nominal, consumen más intensidad y su velocidad de giro es menor o (1 o 2
pares de polos) y ofrecer menos par mecánico nominal, una velocidad de giro más elevada
y un menor consumo de intensidad.
Figura 37. Potencia nominal en función I0/IN; Promedio 93 kW y I0/IN 6,3 pu
161, 93
0
200
400
600
800
1000
1200
0 250 500 750 1000 1250 1500 1750
PN
(kW
)
IN (A)
Motor
Promedio
Todos los motores
93, 6,30
0
2
4
6
8
10
0 100 200 300 400 500 600 700 800 900 1000 1100
I 0/ I N
(pu
)
Potencia (kW)
Motor
Promedio
Todos los motores

38
En la Figura 37, se muestra la relación de I0/IN , es un punto interesante de analizar
en el momento de seleccionar un motor para cualquier aplicación. Esta relación afecta
directamente a la red de suministro y como se pude ver en algunas ocasiones puede llegar a
ser una intensidad casi 10 veces superior a la IN.
El motor que consume más intensidad en el momento del arranque es un motor del
fabricante ABB, tiene una potencia nominal de 1000 kW y consume 12971,4 A en el
arranque, este motor tiene una relación de I0/IN = 7,8pu.
Y el motor que ofrece una relación más elevada es un motor del fabricante LEROY
SOMER, tiene una potencia nominal de 9 kW y consume 164,34 A en el arranque, este
motor tiene una relación de I0/IN = 9,9pu.
El REBT (ITC-47) se basa en la norma UNE 20.460 y fija unos límites para esta
relación en función de la potencia nominal de los motores.
Motores de corriente alterna
PN I0/IN
motores que
cumplen la
normativa
Motores en
el rango de
potencia
De 0,75 kW a 1,5 kW 4,50 37 de 140 140
De 1,5 kW a 5,0 kW 3,00 14 de 266 266
De 5,0 kW a 15 kW 2,00 5 de 383 383
De más de 15 kW 1,50 0 de 1169 1169
Tabla 20. Motores que se pueden accionarse directamente sin perjudicar a la red de suministros
En la Tabla 20, se muestran los requerimientos a cumplir según REBT, se cuantifican
los motores que están en la base de datos y cuántos de ellos se pueden accionar
directamente.
Por debajo de 0,75 kW no se fija ninguna restricción, en la base de datos de este
trabajo hay 248 motores con una potencia nominal inferior a 0,75 kW. El cómputo total de
motores de este trabajo que se les permite un arranque directo son 304 de un total de 2206.

39
4.12 Rendimiento en función de la potencia y el par mecánico
Figura 38.Rendimiento en función de la potencia nominal para todos los motores
Figura 39.Rendimiento en función de la potencia nominal para 2167 motores
En la Figura 38, se muestran todos los motores de la base de datos, aparecen unos
motores con rendimiento 0%, es debido a que los fabricantes no han suministrado en sus
catálogos este dato y no se ha podido rellenar correctamente la base de datos.
En la Figura 39, se muestran todos los motores de la base de datos que si disponen de
todos los datos y se eliminan un total de 39 motores, en esta Figura 39, el promedio del
rendimiento ha mejorado ligeramente.
En la Figura 39, se aprecia que los motores de poca potencia su rendimiento es
bastante bajo, a medida que la potencia aumenta, el rendimiento se mejora.
92, 86
0
20
40
60
80
100
0 200 400 600 800 1000 1200
η(%
)
PN (kW)
Motor
Promedio
Todos los motores
92, 88
0
20
40
60
80
100
0 200 400 600 800 1000 1200
η(%
)
PN (kW)
Motor
Promedio
2167 motores

40
5 Características mecánicas de los vehículos con motores de
combustión interna
El principio de funcionamiento de los vehículos con motor de combustión interna
resumido brevemente es el siguiente.
Consiste en la detonación de un combustible en un espacio reducido (cilindro), la
detonación genera una energía que empuja un pistón que está dentro del cilindro creando
una fuerza lineal. Esta fuerza lineal se aplica a una biela conectada a una rueda que genera
un giro de la rueda.
En la detonación se genera energía en forma de calor y fuerza mecánica, el calor
generado no se aprovecha y la fuerza mecánica debe de mover bastantes piezas mecánicas
antes de obtener el par mecánico en la ruda del vehículo y el rendimiento de este tipo de
motores de combustión interna es muy bajo.
En el proceso de la combustión del combustible se generan gases contaminantes que
son expulsados a la atmosfera.
Las averías y mantenimiento de estos motores comportan un coste económico de
mantenimiento y gestión de los residuos generados.
5.1 Origen de los datos de los motores de combustión interna
Los datos de utilizados para generar la base de datos de los vehículos utilizados en
este trabajo proceden de una página web del mundo de la automoción. La página web es
http://www.autobild.es la cual semanalmente publica una revista sobre la actualidad en el
mundo del motor. En dicha página se pueden encontrar fichas técnicas de vehículos del
mercado actual, se han seleccionado 100 vehículos para crear la base de datos.
Los datos seleccionados para generar la base de datos de vehículos han sido:
Fabricante
Modelo, nombre comercial de un vehículo
Motorización, cilindrada que cubica el motor
Potencia máxima, los fabricantes de vehículos ofrece la potencia máxima
desarrollada por el motor, ya que en este tipo de motores no puede
desarrollar la misma potencia a diferentes régimen de revoluciones, se
denomina con la letra (PM) y se mide en Caballos de Vapor (CV)
Par mecánico máximo, es el par mecánico máximo que puede ofrecer el
motor, se denomina con las letras (TM) y se mide en Newton·metro (Nm)
Velocidad máxima, es la velocidad máxima que puede desarrollada el
vehículo, y se mide en kilómetros/hora (km/h).
Régimen de giro del motor para la potencia máxima, es a la velocidad que el
motor ofrece la potencia máxima y se mide en revoluciones por minuto
(rpm).

41
Régimen de giro del motor para el par mecánico máximo, es a la velocidad
que el motor ofrece el par mecánico máximo y se mide en revoluciones por
minuto (rpm).
Combustible
Medidas del neumático
Los fabricantes de vehículos seleccionados son: AUDI, BMW, BUGATTI,
CATERHAM, DS, FERRARI, FORD, HYUNDAI, JAGUAR, KIA, LAMBORGHINI,
MASERATI, MERCEDES, MINI, OPEL, PEUGEOT, RENAULT, SEAT, SAMRT,
SUZUKI, TESLA, TOYOTA, VOLKSWAGEN.
5.2 Características de la base de datos de los vehículos
De igual forma que se ha hecho con la base de datos de los motores de inducción,
ahora se presenta cuantitativamente la base de datos desglosándola en diferentes grupos.
Agrupación según la potencia expresada en CV:
Figura 40. nº de motores por rango de potencia expresada en CV.
Potencia (CV) %
P ≤ 100 23,00
100 < P ≤ 150 38,00
150 < P ≤ 200 14,00
200 < P ≤ 500 20,00
P > 500 5,00
Total 100,00
Tabla 21. Repartición por tramos de potencia expresada en CV.
23
38
14
20
5
P ≤ 100 100 < P ≤ 150 150 < P ≤ 200 200 < P ≤ 500 P > 500
Un
ida
des

42
Agrupación según la potencia expresada en kW:
Figura 41. nº de motores por rango de potencia expresada en kW.
Potencia (kW) %
P ≤ 100 50,00
100 < P ≤ 150 25,00
150 < P ≤ 200 8,00
200 < P ≤ 500 14,00
P > 500 3,00
Total 100,00
Tabla 12. Repartición por tramos de potencia expresada en kW.
Agrupación según la cilindrada:
Figura 42. nº de motores por rango de cilindrada.
Volumen de los Cilindros del
motor (cm3) %
Vol ≤ 1000 8,60
1000 < Vol ≤ 1500 35,48
1500 < Vol ≤ 2000 43,01
2000 < Vol ≤ 3000 6,45
Vol > 3000 6,45
Total 100,00
Tabla 23. Repartición por tramos de la cilindrada.
50
25
8
14
3
P ≤ 100 100 < P ≤ 150 150 < P ≤ 200 200 < P ≤ 500 P > 500
Un
ida
des
8
33
40
6 6
Vol ≤ 1000 1000 < Vol ≤ 1500 1500 < Vol ≤ 2000 2000 < Vol ≤ 3000 Vol > 3000
Un
ida
des

43
Agrupación según el par mecánico máximo:
Figura 43. nº de motores por rango de par mecánico máximo.
Par máximo TM (Nm) %
TM ≤ 250 48,00
250 < TM ≤ 500 38,00
TM > 500 14,00
Total 100,00
Tabla 24. Repartición por tramos de par mecánico máximo.
Agrupación según el tipo de combustible:
Figura 44. nº de motores según el tipo de combustible.
Tipo de combustible %
Diésel 36,00
Eléctrico 7,00
Gasolina 52,00
GLP/Gas 3,00
Híbrido 2,00
Total 100,00
Tabla 25. Repartición según el tipo de combustible.
48
38
14
TM ≤ 250 250 < TM ≤ 500 TM > 500
Un
ida
des
36
7
52
3 2
Diesel Eléctrico Gasolina GLP/Gas Híbrido
Un
ida
des

44
Agrupación según la velocidad máxima:
Figura 45. Según velocidad máxima
Velocidad máxima (km/h) %
v.max ≤ 180 23,00
180 < v.max ≤ 200 19,00
200 < v.max ≤ 220 22,00
220 < v.max ≤ 250 26,00
v.max > 250 9,00
Total 99,00
Tabla 26. Repartición según la velocidad máxima.
En la Figura 45 y en la Tabla 26, no se ha podido disponer de la velocidad máxima
de un vehículo.
5.3 Análisis de los vehículos con motor de combustión interna
En este apartado se analiza el comportamiento de la potencia máxima y el par
mecánico máximo de los vehículos en función de la velocidad máxima que pueden llegar a
desarrollar.
5.3.1 Potencia y velocidad máxima
En los catálogos de vehículos la potencia se expresa en Caballos de Vapor (CV) y en
la industria se utiliza el sistema internacional, en el SI la unidad de potencia es el vatio
(W). Para realizar este trabajo se han convertido los CV en kW. Sirva la ecuación (5.1)
como conversión para pasar de CV a kW.
1 CV = 0,736 kW (5.1)
Hay que tener en cuenta que en los catálogos de los vehículos, la potencia que se
facilita es la potencia máxima en CV. Se muestra la potencia máxima que desarrolla el
motor de combustión en un punto concreto de su régimen de giro ya que esta potencia no
se puede entregar a cualquier revoluciones.
23
1922
26
9
ʋ ≤ 180 180 < ʋ ≤ 200 200 < ʋ ≤ 220 220 < ʋ ≤ 250 ʋ > 250
Un
ida
des

45
Figura 46. Velocidad máxima en función de la potencia máxima desarrollara.
𝑃𝑀 = 2 ∙ 10−5 ∙ 𝑣3 − 0,002 ∙ 𝑣2 − 0,189 ∙ 𝑣 + 60,28 (5.2)
Donde: PM = potencia máxima (kW)
𝑣 = velocidad máxima (km/h)
La Figura 46, muestra la potencia máxima de cada uno de los vehículos en función
de la velocidad máxima de cada uno de ellos. Y la ecuación (5.2) muestra la aproximación
del polinomio de la línea de tendencia. La línea de tendencia pasa casi todo los puntos
excepto en los puntos que están a la altura de los 250 km/h y algún otro punto más. Se
tiene que tener en cuenta que esta ecuación es válida entre 135 km/h hasta 420 km/h.
Otro aspecto a considerar es que dependiendo del vehículo algunos fabricantes optan
por limitar la velocidad máxima a 250 km/h. En las figuras se puede observar una
dispersión a esa velocidad máxima de 250 km/h debido a esta limitación.
5.3.2 Par mecánico máximo y velocidad máxima
Figura 47. Velocidad máxima en función del par mecánico máximo desarrollado.
𝑃𝑀 = 7 ∙ 10−5 ∙ 𝑣3 − 0,043 ∙ 𝑣2 + 11,89 ∙ 𝑣 − 939,4 (5.3)
Donde: PM = potencia máxima (kW)
𝑣 = velocidad máxima (km/h)
La Figura 47, muestra el par mecánico máximo de cada uno de los vehículos en
función de la velocidad máxima de cada uno de ellos.
0
250
500
750
1000
1250
1500
0 50 100 150 200 250 300 350 400 450
PM
(kW
)
Velocidad máxima (km/h)
0
250
500
750
1000
1250
1500
1750
0 50 100 150 200 250 300 350 400 450
TM
(Nm
)
Velocidad máxima (km/h)

46
La ecuación (5.3) muestra la aproximación del polinomio de la línea de tendencia,
esta vez la dispersión sobre la línea de tendencia es más elevada y por consiguiente la
ecuación (5.3) no es tan fiable como puede ser la ecuación (5.2). Igual que a la ecuación
(5.2) Se tiene que tener en cuenta que es válida entre 135 km/h hasta 420 km/h. En esta
Figura 47 a la velocidad de 250 km/h también se observa una variación importante del par
mecánico, estos puntos de par superiores pudrían indicar que estos vehículos pueden tener
limitada su velocidad máxima a 250 km/h

47
6 Comparación entre MdI y motores de combustión interna
Existen infinidad de diferencia para comparar un motor de inducción con un motor
de combustión interna. Para simplificar el análisis en este trabajo solo se va a comparar los
parámetros mecánicos necesarios para que se pueda justificar el uso de un MdI en
sustitución de un motor de combustión interna.
Los motores eléctricos son extremadamente simples y los de combustión interna
tiene miles de piezas móviles y fluidos, los vehículos eléctricos necesitan un complejidad
diferente, elementos electrónicos de control y potencia.
Por el hecho que los motores de inducción son más eficientes, tiene menor
mantenimiento, averías y no generan contaminación a la atmosfera durante el uso de éstos,
es factible pensar en utilizarlos como sustituto al motor tradicional de combustión interna.
La comparativa propuesta en este trabajo consiste en analizar el motor de inducción
trifásico que más se asimile al motor de combustión interna en los siguientes puntos:
Velocidad a la que puede circular un vehículo
Par mecánico necesario para desarrollar cierta velocidad del vehículo en
km/h.
Potencia necesaria para desarrollar cierta velocidad del vehículo en km/h.
Par mecánico en función de la potencia.
6.1 Cálculo de la velocidad de un vehículo
Se puede calcular la velocidad de cualquier vehículo si se dispone de la medida del
neumático y de la velocidad de giro que se aplica a la llanta, en el caso de acoplar un motor
eléctrico, se puede saber la velocidad (km/h) que circulará, si se dispone del suficiente par
mecánico para trabajar a la velocidad nominal del motor.
Se ha seleccionado la medida del neumático más utilizado de la base de datos de los
vehículos y se ha calculado la velocidad a la que circularía si se le acoplase un motor de
inducción (se ha utilizado la velocidad de sincronismo ya que es igual para todos los
motores con el mismo número de pares de polos y frecuencia).
Velocidad de sincronismo para el ejemplo, nS = 750 rpm
Neumático más utilizado en la base de datos de los vehículos, 205/55 R 16
Con estos dos datos se calcula el siguiente ejemplo:
Las medidas del neumático se encuentran en los flancos del mismo 205/55 R 16
Número de 3 cifras, 205, es el ancho del neumático inflado, en milímetros.
Número de 2 cifras, 55, es la llamada “relación de aspecto” entre la altura del perfil y
la anchura del neumático, como un porcentaje.
R indica el tipo de construcción de la carcasa del neumático, en este caso
construcción radial.
Último número de dos cifras, 16, es el diámetro de la llanta para la que el neumático
está diseñado específicamente, en pulgadas.

48
Altura del flanco del neumático:
205 ∙ 55
100= 112,75 mm (6.1)
El neumático tiene dos flancos:
112,75 ∙ 2 = 225,5 mm (6.2)
Diámetro de la llanta:
16" ∙25,4 mm
1"= 406,4 mm (6.3)
Diámetro total del neumático y llanta:
225,5 + 406,4 = 631,9 mm (6.4)
Perímetro del neumático:
2 ∙ π ∙Ø
2= π ∙ 631,9 = 1985,172 mm (6.5)
Velocidad del vehículo en función de la velocidad de sincronismo de un MdI
acoplado directamente a la llanta, nS= 750 rpm.
750 rpm
1 ′∙
60 ′
1 h∙ 1985,172 mm ∙
1 km
106 mm= 89,332 km
h (6.6)
Ancho neumático
(mm)
Relación
Altura/ancho
Diámetro llanta
(Pulgadas) nS (rpm)
Perímetro
(mm)
Velocidad
(km/h)
205 55 16 750 1985,17 89,33
205 55 16 900 1985,17 107,20
205 55 16 1000 1985,17 119,11
205 55 16 1200 1985,17 142,93
205 55 16 1500 1985,17 178,67
205 55 16 1800 1985,17 214,40
205 55 16 3000 1985,17 357,33
205 55 16 3600 1985,17 428,80
Tabla 27. Velocidad desarrollada por diferentes MdI
Se ha generado la Tabla 27, para obtener la velocidad del posible vehículo utilizando
diferentes velocidades de sincronismo de motores de inducción.
6.2 Par mecánico
Es necesario conocer el comportamiento de los motores de inducción trifásicos para
seleccionar bien un posible candidato, para ello se ha simulado el comportamiento del par
mecánico en función de la velocidad n, de varios MdI.

49
Con las siguientes gráficas se podrá seleccionar un punto de trabajo (revoluciones y
par) y saber si, en ese rango de potencia que muestra la gráfica, se puede utilizar ese rango
de potencia.
Para calcular el par mecánico y hacer las gráficas se ha utilizado la siguiente
hipótesis.
Si se alimenta un MdI mediante un convertidor electrónico, se puede trabajar a flujo
magnetizante constante (hasta llegar a la velocidad de sincronismo), que permite un control
de la velocidad, un comportamiento lineal y una reducción de la intensidad de arranque.
A continuación se simula el comportamiento que tendría un MdI alimentado por un
convertidor electrónico.
Al principio se trabaja a par mecánico nominal constante hasta llegar a su velocidad
de sincronismo, después de alcanzar dicha velocidad, se continuará simulando el par
mecánico hasta llegar a las 8000 rpm (se simula el comportamiento de convertidor
electrónico).
La ecuación (6.7) se utiliza para las siguientes velocidades [0< n ≤ nS], el flujo
magnetizante es constante.
T = TN (Nm) (6.7)
Donde: T , par mecánico desarrollado (Nm)
TN , par mecánico nominal del motor (Nm)
La ecuación (6.8) se utiliza para las siguientes velocidades [nS < 8000], el flujo
magnetizante no es constante. Esta ecuación es una aproximación utilizando únicamente la
frecuencia.
T = fN
f
2
∙ TN (Nm) (6.8)
Donde: T , par mecánico desarrollado (Nm)
fN , frecuencia nominal del motor (Hz)
f, frecuencia de alimentación en bornes del estator (Hz)
TN ,par mecánico nominal del motor (Nm)
En las siguientes figuras se han separado los motores en las dos frecuencias nominales.

50
Figura 48. Par mecánico en función de la velocidad del MdI para motores de potencia nominal 11 kW y frecuencia
nominal 50 Hz
Potencia 11 kW
nS Ecuación
750 T = 8·107·n-2
1000 T = 108·n-2
1500 T = 2·108·n-2
3000 T = 3·108·n-2
Tabla 28. Ecuaciones del par mecánico a para velocidades superiores a las de sincronismo en motores de frecuencia
nominal 50 Hz
Figura 49. Par mecánico en función de la velocidad del MdI para motores de potencia nominal 11 kW y frecuencia
nominal 60 Hz
Potencia 11 kW
nS Ecuación
900 T = 108·n-2
1200 T = 108·n-2
1800 T = 2·108·n-2
3600 T = 4·108·n-2
Tabla 29. Ecuaciones del par mecánico a para velocidades superiores a las de sincronismo en motores de frecuencia
nominal 60 Hz
0
25
50
75
100
125
150
0 1000 2000 3000 4000 5000 6000 7000 8000
750
1000
1500
3000
T(N
m)
n (rpm)
PN = 11 kW
0
25
50
75
100
125
150
0 1000 2000 3000 4000 5000 6000 7000 8000
900
1200
1800
3600T(N
m)
n (rpm)
PN = 11 kW

51
Figura 50. Par mecánico en función de la velocidad del MdI para motores de potencia nominal 110 kW y frecuencia
nominal 50Hz
Potencia 110 kW
nS Ecuación
750 T = 8·108·n-2
1000 T = 109·n-2
1500 T = 2·109·n-2
3000 T = 3·109·n-2
Tabla 30. Ecuaciones del par mecánico a para velocidades superiores a las de sincronismo en motores de frecuencia
nominal 50 Hz
Figura 51. Par mecánico en función de la velocidad del MdI para motores de potencia nominal 110 kW y frecuencia
nominal 60Hz
Potencia 110 kW
nS Ecuación
900 T = 109·n-2
1200 T = 109·n-2
1800 T = 2·109·n-2
3600 T = 4·109·n-2
Tabla 31. Ecuaciones del par mecánico a para velocidades superiores a las de sincronismo en motores de frecuencia
nominal 60 Hz
0
200
400
600
800
1000
1200
1400
1600
0 1000 2000 3000 4000 5000 6000 7000 8000
750
1000
1500
3000
T(N
m)
n (rpm)
PN = 110 kW
0
250
500
750
1000
1250
1500
0 1000 2000 3000 4000 5000 6000 7000 8000
900
1200
1800
3600T(N
m)
n (rpm)
PN = 110 kW

52
Figura 52. Par mecánico en función de la velocidad del MdI para motores de potencia nominal 800 kW y frecuencia
nominal 50 Hz
Potencia 110 kW
nS Ecuación
750 T = 6·109·n-2
1000 T = 8·109·n-2
1500 T = 1010·n-2
3000 T = 2·1010·n-2
Tabla 32. Ecuaciones del par mecánico a para velocidades superiores a las de sincronismo en motores de frecuencia
nominal 50 Hz
En las Figuras 48 - 52, y de las Tablas 28 - 32, se puede ver el comportamiento del
par mecánico en función de la velocidad.
Una vez se llega a la velocidad ns, los motores no pueden continuar trabajando a flujo
constante porqué la tensión no puede continuar aumentando en cambio la frecuencia sí que
puede continuar aumentando. Pasado este punto es un error pensar que se trabajar a
potencia constante ya que el flujo magnetizante se debilita.
A la Figura 47, se le han aplicado los siguientes filtros, se ha eliminado los vehículos
que desarrollan una velocidad de 250 km/h, el vehículo más rápido y más lento y se han
eliminado los vehículos con motorización hibrida y motores eléctricos, quedando 85
motores en la figura. Se ha insertado el punto valor promedio de la gráfica, obteniendo la
Figura 53.
Con esta nueva, Figura 53, y el valor promedio de la velocidad de los vehículos, se
vuelve a la (Tabla 27. Velocidad desarrollada por diferentes MdI), se selecciona un motor
de una velocidad nS=1800 rpm, que pude desarrollar una velocidad, instalado directamente
a la llanta de un vehículo, para poder desarrollar 214,40 km/h.
0
2000
4000
6000
8000
10000
12000
0 1000 2000 3000 4000 5000 6000 7000 8000
750
1000
1500
3000
T(N
m)
n (rpm)
PN = 800 kW

53
Figura 53. Par mecánico máximo en función de la velocidad máxima, con el punto promedio de 211 km/h y 282 Nm.
Se ha filtrado la base de datos de los MdI para localizar que motor de nS = 1800 rpm,
y que pueda ofrecer un par mecánico máximo de 282 Nm o un valor similar.
Fab
rica
nte
Tip
o
Alt
ura
eje
(m
m)
PN (
kW
)
nN (
rpm
)
Ren
dim
ien
to (
%)
Fac
tor
de
po
ten
cia
TN
(Nm
)
T0 /
TN
TM
/T
0
T0 (
Nm
)
TM
/T
N
TM
(N
m)
WEG 286T 177,8 22,00 1.760 92,4 0,87 120,6 2,300 1,043 277,44 2,400 289,50
WEG 286T 177,8 22,00 1.765 93,6 0,84 120,4 2,400 1,125 288,84 2,700 324,95
WEG 284T 177,8 18,50 1.775 94,5 0,81 100,3 3,000 1,133 300,814 3,400 340,92
Tabla 33. Extracto de la base de datos de los MdI.
En la Tabla 33, se muestran los tres primeros MdI que entregan una potencia igual o
superior a los 282 Nm, justamente igual no hay ningún motor, por debajo no interesa ya
que no entrega el par máximo requerido. Estos tres pueden ser posibles candidatos para
sustitución de los motores de combustión interna.
El candidato ideal sería el que se muestra en la Tabla 34, por la altura de eje que la
comparte con el motor de 289,50 Nm, el seleccionado ofrece más par de arranque y más
par nominal, con la misma potencia y con las mismas rpm.
Fab
rica
nte
Tip
o
Alt
ura
eje
(m
m)
PN (
kW
)
nN (
rpm
)
Ren
dim
ien
to (
%)
Fac
tor
de
po
ten
cia
TN
(Nm
)
T0 /
TN
TM
/T
0
T0
(N
m)
TM
/T
N
TM
(N
m)
WEG 286T 177,8 22,00 1.765 93,6 0,84 120,4 2,400 1,125 288,84 2,700 324,95
Tabla 34. Extracto de la base de datos de los MdI.
211, 282
0
250
500
750
1000
0 50 100 150 200 250 300 350 400
TM
(Nm
)
Velocidad máxima (km/h)
Motor
Promedio

54
6.3 Potencia
Una vez se ha seleccionado un candidato se analiza la potencia necesaria por los
motores de combustión interna y los MdI, comparando la potencia máxima que ofrecen
cada uno de ellos.
Figura 54. Potencia máxima en función de la velocidad máxima, con el punto promedio de 211 km/h y 126 kW.
A esta (Figura 54) se han aplicado los mismos criterios de filtro que se le han
aplicado a la (Figura 53).
Considerando que los dos tipos de motores van a rodar a 214 km/h, un motor de
combustión interna necesita desarrollar un par mecánico máximo de 282 Nm (Figura 53) y
necesita una potencia máxima de 126 kW (Figura 54), mientras que un motor de MdI para
desarrollar un par mecánico máximo de 324,95 Nm necesita una potencia nominal de
22 kW (ver Tabla 34). Se puede decir que con los motores de inducción trifásicos se
necesita menos potencia ya que son capaces de ofrecer el mismo par mecánico que los
motores de combustión interna, que necesitan ser más potentes para realizar el mismo par
mecánico.
Un motor de combustión interna necesita una potencia superior a la que necesita un
motor de inducción trifásico para ofrecer el mismo par mecánico.
6.4 Par mecánico en función de la potencia
Para finalizar el análisis comparativo, se analiza el par mecánico máximo con la
potencia máxima de todos los motores tanto los MdI como los de combustión interna.
Figura 55. Logaritmo del par mecánico máximo en función de la potencia
211, 126
0
250
500
750
0 50 100 150 200 250 300 350 400
PM
(kW
)
Velocidad máxima (km/h)
Motor
Promedio
0
1
10
100
1000
10000
100000
0 200 400 600 800 1000 1200Lo
g T
M (N
m)
P (kW)
Combustión
MdI

55
En la Figura 55, se muestra la distribución del par máximo mecánico, en log10, en
función de la potencia. Para una misma potencia los MdI ofrecen más par mecánico
máximo que los motores de combustión.
Figura 56. Logaritmo del par mecánico en función de la potencia
En esta última Figura 56, se muestra la distribución del par mecánico, en log10, en
función de la potencia. Esta vez el par que se muestra es distinto a la Figura 55, ya que
para los motores de combustión se ha utilizado el par mecánico máximo, que es el único
disponible en los catálogos, y para los MdI se ha utilizado el par mecánico nominal. En
esta Figura 56, para una misma potencia, la diferencia entre los diferentes pares mecánicos
de los motores de combustión y motores de inducción, es menor, pero continua ofreciendo
más par mecánico los motores de inducción.
0
1
10
100
1000
10000
100000
0 200 400 600 800 1000 1200
Lo
g T
(Nm
)
P (kW)
Combustión
MdI

56
7 Conclusiones
Después de analizar los datos facilitados por los fabricantes, en una muestra de 2206
motores de inducción trifásicos, se han observado las siguientes conclusiones:
Para un determinado valor de la velocidad de sincronismo, se observa una
relación lineal entre el par mecánico desarrollado por el motor y su potencia.
Para una determinada potencia, los motores con menor velocidad de
sincronismo desarrollan mayor par, y viceversa.
Como cabía esperar, se ha comprobado que en la muestra analizada, hay una
relación hiperbólica entre par mecánico y velocidad de rotación.
Tal como ya era previsible, se ha comprobado que los motores de potencia
elevada son los que presentan menor deslizamiento en condiciones
nominales y mayor par.
La relación entre el par de arranque y el par nominal presenta un valor
medio de 2,35 en la muestra escogida. Por tanto, la inmensa mayoría de
motores comerciales actuales disponen de un buen par de arranque.
La relación entre el par máximo y el par nominal presenta un valor medio de
2,77 en la muestra escogida. Este valor es ligeramente superior a la relación
anterior, lo que indica que la mayoría de motores presentan un par de
arranque cercano al par máximo.
Los fabricantes disponen de una amplia oferta de motores, que cubre toda la
gama de velocidades de sincronismo y cualquier altura de eje. Este hecho
permite escoger el MdI con la altura del eje de la carga mecánica, y
posteriormente seleccionar el motor en función de las características
mecánicas requeridas.
Aunque con mucha dispersión, la relación entre la potencia del motor y la
altura del eje es parabólica.
Para un determinado valor de velocidad de sincronismo, se observa una
relación lineal entre el par mecánico desarrollado por el motor y la corriente
consumida, tanto en el punto nominal, como en el arranque.
El valor medio entre la corriente de arranque y la corriente nominal es de
6,3 para la muestra estudiada.
Se ha comprobado que en la muestra analizada el rendimiento en el punto de
funcionamiento nominal es mejor en motores de potencias elevadas. Por el
contrario, el rendimiento es bajo para motores de potencias fraccionarias.
En los motores de explosión analizados se observa una relación parabólica
entre la potencia máxima desarrollada y la velocidad máxima declarada por
el fabricante.
De cara a la selección de un MdI de una determinada potencia, se han
generado curvas par-velocidad, que permiten determinar qué motores
pueden conseguir el par y la velocidad requeridos en un punto de
funcionamiento determinado. De este modo se puede seleccionar para una
determinada aplicación el MdI más adecuado.

57
Se ha comprobado que sólo 304 motores de la muestra pueden arrancar
directamente sin incumplir la relación entre la corriente de arranque y la
corriente nominal indicada por el REBT.
La utilización de un motor de inducción trifásico para sustituir un motor de
combustión interna, desde el punto de vista mecánico, es factible y
funcional.
Se ha diseñado un método para calcular la velocidad de cualquier vehículo
si se dispone de la medida del neumático y de la velocidad de giro que se
aplica a la llanta. Para este trabajo se ha pensado en acoplar una llanta a un
motor eléctrico y hacerlo girar a velocidades de sincronismo, realizando una
comparación de velocidades con vehículos reales.
Se ha podido acotar el análisis comparativo de tal forma que se han
localizado hasta 3 motores muy cercanos a las necesidades propuestas y
demostrando que es factible la sustitución de los motores de combustión
interna por los motores de inducción trifásicos que son más eficientes, con
menor coste de mantenimiento y con unas prestaciones superiores.
Una vez realizada esta comparativa entre los MdI y los motores de
combustión interna se observa que las características mecánicas de los MdI
son superiores a los motores de explosión y que su limitación actual se
encuentra en el precio, la autonomía y tiempo de recarga de las baterías.
Cuando se minimicen estas limitaciones se pueden incrementar las
aplicaciones de los MdI a: camiones, barcos y aviones.

58
8 Referencias
[1] http://intecap-rebobinadodemotores.blogspot.com.es/2014/05/rebobinado-de-motores-
esta-es-una.html
[2] http://img.interempresas.net/fotos/1364724.jpeg
[3] Catálogo ABB 2010.pdf , página 32
[4] Jordi García Amorós. Apuntes de "Disseny de màquines elèctriques".
Tema 3w, página 2, Curso 2014-15.
[5] http://www.ecvv.com/product/4472539.html
[6] Catálogo ABB 2010.pdf , página 32 y 49
[7] https://automatismoindustrial.com/par-motor-par-resistente/
[8] José Antonio Barrado Rodrigo. Apuntes de "Control de máquinas eléctricas".
CME 1617_T1 Introd, página. 5, Curso 2016-17.
ABB - http://new.abb.com
CMG - http://www.cmggroup.com.au
LEROY SOMER - http://www.emersonindustrial.com/en-EN/leroy-somer-motors-drives
MARELLI - http://www.marellimotori.com
ROSSI - http://www.rossi-group.com
SIEMENS - https://www.siemens.com/global/en/home.html
WEG - http://www.weg.net
http://www.autobild.es
Bartomeu Angulo Salonen. "Cálculo y análisis de los parámetros eléctricos de un conjunto
de motores de inducción". TFG. Universitat Rovira i Virgili. Septiembre 2013
Manuel Cereijo Neira. "Método para la estimación del momento de inercia de máquinas de
inducción trifásicas a partir de su peso y altura de eje". TFC. Universitat Rovira i Virgili.
Septiembre 2011
Raúl Castro Nevado. "Análisis de los parámetros estimados en un conjunto de motores de
inducción trifásicos". TFC. Universitat Rovira i Virgili. Junio 2015
Javier Cortes Comin. "Análisis de la clase de rendimiento de los motores de inducción
trifásicos a partir de los datos del fabricante". TFG. Universitat Rovira i Virgili. 2015.
Miguel Ángel Rodríguez Pozueta. "Teoría de las máquinas asíncronas o de inducción".
http://personales.unican.es/rodrigma/primer/publicaciones.htm
Adolfo Andrés Jaramillo Matta y Luís Guasch Pesquer. "Estimación de parámetros para la
máquina de inducción a partir de datos de catálogos y aspectos constructivos".
Universitat Rovira i Virgili.
http://intranet.ceautomatica.es/old/actividades/jornadas/XXIX/pdf/273.pdf
https://www.boe.es/diario_boe/txt.php?id=BOE-A-2002-18099, ITC-BT-47 Instalación de
receptores - Motores - Tabla 1
Luis Guasch Pesquer. Apuntes de "Fonaments de màquines elèctriques". Universitat Rovira i
Virgili. Curso 2013-14
Luis Guasch Pesquer. Apuntes de "Màquines elèctriques". Universitat Rovira i Virgili.
Curso 2014-15
José Antonio Barrado Rodrigo. Apuntes de "Control de máquinas eléctricas". Universitat
Rovira i Virgili. Curso 2016-17.
Jordi García Amorós. Apuntes de "Disseny de màquines elèctriques". Universitat Rovira i
Virgili. Curso 2014-15
Recommended