Embed Size (px)
Citation preview
1
BIOMECANICA - I
Primera Unidad:
Introducción a la
biomecánica
2
QUINTO CAPITULO:
PROPIEDADES BIOMECÁNICAS DE LAS ACCIONES MOTORAS
GLOBALES DEL CUERPO

3
PROPIEDADES BIOMECÁNICAS GLOBALES
Gravitación o Fuerza de Gravedad Centro de Gravedad o de Masa Equilibrio Estabilidad Peso Corporal Distribución del peso Baricentro
4
Fuerzas Externas Geometría Espacial: Planos y Ejes Postura y Posiciones Corporales Modelos Anatómicos Geométricos Columnas Equilibrio y Estabilidad de las Columnas Resistencia Axial de Columnas Cadenas: Cinéticas y Musculares Palancas
5
Gravitación o Fuerza de Gravedad
• Define al efecto, expresado como una fuerza, que ejerce un cuerpo sobre otro cuerpo.
• Todo cuerpo, dada su maza, genera en su entorno un efecto de fuerza de atracción denominado campo gravitatorio, el que es directamente dependiente de la masa, e inversamente dependiente de la distancia de su centro
6
• Esta fuerza bajo condiciones normales afecta constantemente a todos los objetos de la tierra.
• Por lo tanto, la fuerza de gravedad representa la atracción de la tierra hacia los objetos o cuerpos dentro su esfera de influencia.
• Biomecánicamente, esta fuerzas se definen como un fuerza externa que corresponde a la fuerza ejercida por un objeto que se encuentra fuera del cuerpo.
7
• Como toda fuerza, es una cantidad vectorial, de manera que puede ser descrita por un punto de aplicación de la fuerza, línea o dirección de acción y magnitud.
• Mientras que la gravedad actúa sobre todos y cada uno de los puntos o segmentos de un cuerpo, su punto de aplicación se encuentra representado por el centro de gravedad (CG) de dicho cuerpo, objeto o segmento de éste.
8
Centro de Gravedad o de Masa
• El centro de gravedad representa aquel punto hipotético de un cuerpo u objeto, en el cual se concentra toda su masa.
• Corresponde al punto de convergencia de las líneas de fuerza de un cuerpo.
• Representa al punto donde actúa la fuerza de gravedad y por lo tanto representa al peso de este.
9
• En un cuerpo u objeto simétrico, el centro de gravedad se localiza en el centro geométrico de dicho cuerpo u objeto.
• Por otro lado, en un objeto o cuerpo asimétrico, el centro de gravedad se encuentra hacia el extremo más pesado, es decir, en aquel punto donde se distribuye equitativamente la masa.
10
• El vector de gravedad se conoce comúnmente como la línea de gravedad.
• La línea y dirección de acción de la fuerza de gravedad son siempre verticales y orientadas hacia abajo, es decir, hacia el centro de la tierra.
• Esto siempre es asía, sin importar la posición actual en que se encuentra el cuerpo u objeto.
11
Centros de Gravedad Segméntales
• Cada segmento de nuestro organismo humano posee su propio centro de gravedad, por lo tanto sobre éstos actúa la fuerza de gravedad.
• En el caso de que dos segmentos adyacentes se combinan y son considerados como un solo segmento sólidos, entonces el nuevo segmento tendrá un nuevo centro de gravedad que estará ubicado en medio y alineado entre los centros de gravedad originales.
12
• Si dichos segmentos del cuerpo no poseen el mismo peso, entonces el nuevo centro de gravedad estará localizado cerca al segmento más pesado, es decir, el de mayor masa.
• La posición de un cuerpo u objeto en el espacio no
podrá alterar el centro de gravedad. Sin embargo, cuando se juntan dos o más segmentos adyacentes, entonces la ubicación del centro de gravedad de esta unidad habrá de cambiar cuando los segmentos se vuelven a combinar.
13
• Ante un análisis biomecánico, se toma como supuesto que la masa corporal se concentra en el centro de gravedad.
14
• Dada la influencia de otras variables, tales como la resistencia del viento y otras fuerzas externas, el centro de masa de cualquier proyectil bajo la influencia de la fuerza de gravedad sigue una parábola, cuya forma específica dependerá de la velocidad inicial y de su ángulo de salida.
15
• Mediante un análisis biomecánico cuantitativo, se pueden establecer cálculos matemáticos para predecir y describir la altura máxima, distancia recorrida, y el tiempo de desplazamiento, entre otras variables cinemáticas, tales como estimar los efectos dada las variaciones de la velocidad inicial del ángulo.
16
• Desde la posición anatómica de pie, el centro de gravedad en el cuerpo humano se encuentra aproximadamente en la poción anterior de la segunda vértebra del sacro.
• Lo anterior es cierto cuando todas las palancas del organismo humano se combinan y el cuerpo se considera como objeto sólido.
• Así, la ubicación precisa del vector de gravedad para una persona dependerá de las dimensiones físicas de ésta, donde su magnitud será igual a la masa corporal del individuo.
17
Relocalización del Centro de Gravedad:
• Dado que la ubicación del centro de gravedad depende de la distribución de la masa corporal (peso) en el cuerpo y que el peso de los segmentos corporales cambia con la adición de masas externas, sea a través de cargas extras o cambios en la masa corporal, es el caso del sobrepeso en los obesos.
18
• Lo anterior implica que el centro de gravedad habrá de moverse hacia el peso añadido.
• Este cambio en la ubicación del centro de gravedad será proporcional a la magnitud de peso que fue añadido al segmento del cuerpo.
19
• Cambios de posiciones del cuerpo causan cambios en la posición del centro de gravedad.
• Cualquier cambio en la posición de un segmento individual causara un cambio en la posición del centro de gravedad del segmento y del cuerpo también.
• Por ejemplo, al flexionar una extremidad, se mueve su centro de gravedad.
20
• En este caso se acorta entonces el brazo de la resistencia en dicha palanca de tercera clase.
• Esto resulta en una disminución del torque producido por esa resistencia, lo que facilitaría la actividad ya que el torque que tiene que producir el esfuerzo debe ser igual al torque producido por la resistencia.
21
Equilibrio
• Concepto que define a la expresión matemática que determina la nulidad de los efectos sumatorios de los fenómenos mecánicos sobre un cuerpo o sistema determinado, tales como fuerza, torque, presión, entre otros.
• Punto donde se igualan los efectos sumarios
22
• Algunos ejemplos de equilibrio corporal: Equilibrio articular, dado por la acción
de grupos musculares y tejidos periarticulares.
Equilibrio de la postura y la Marcha, dado por acción muscular, articular y fuerzas externas.
23
Estabilidad
• Concepto que define el efecto del equilibrio
• Un cuerpo esta en estado de estabilidad cuando no cambia su punto de equilibrio
• La estabilidad puede ser estática cuando el cuerpo esta en reposo o dinámica cuando el cuerpo esta en equilibrio.
24
• La Estabilidad define la relación entre la localización del centro de gravedad con respecto a la base de soporte o de sustentación, así, para que exista estabilidad, la línea vertical que pasa por el centro de gravedad de un cuerpo debe proyectarse dentro de la base de soporte.
25
• El grado de estabilidad o movilidad de un cuerpo en términos mecánicos dependerá de:
El tamaño de la base de soporte. La altura del centro de gravedad sobre la
base de soporte. La localización de la línea de gravedad
dentro de la base de soporte. El peso del cuerpo.
26
Equilibrio Estable: • Un cuerpo se encuentra en equilibrio estable si, al
provocarle un pequeño desplazamiento, origina un momento que tiende a recuperar su posición de equilibrio.
Equilibrio Inestable: • Un cuerpo se encuentra en equilibrio inestable si
un pequeño desplazamiento en él, origina un momento que tiende a aumentar dicho desplazamiento.
27
Centro de Gravedad y Estabilidad:
• La localización del la fuerza de gravedad con respecto a la base de aboyo de un cuerpo afecta la estabilidad de éste.
• Por lo tanto, para que un objeto o cuerpo sea estable, la línea de gravedad debe estar ubicada dentro de la base de apoyo, de lo contrario, el cuerpo tiende a caerse.
28
• También se debe considerar que , mientras más bajo se dirija el centro de gravedad hacia la base de apoyo de un objeto, más estable será el cuerpo.
• Bajo estas circunstancias, existe una remota
posibilidad que algún tipo de movimiento corporal en el espacio ocasione que el centro de gravedad y la línea de gravedad se salga de los límites de la base de apoyo.
29
• Otro factor que afectan la estabilidad de un objeto o cuerpo, es el tamaño de la base de apoyo o de sustentación.
• En general, entre más grande sea la base de apoyo de un cuerpo u objeto, mayor será su estabilidad.
• Cuando la base de apoyo es grande, la línea de gravedad tendrá más libertad para moverse, sin tener que salir de la base de apoyo.
30
Peso Corporal
• Representa la fuerza con que un cuerpo de masa determinada es atraída por la fuerza gravitatoria.
• Es la fuerza de atracción entre dos cuerpos. Proporcional a las masas relativas de cada cuerpo
31
• Si Peso es la fuerza que ejerce la tierra sobre los cuerpos que se encuentran sobre ella y g es la aceleración de gravedad generada por la atracción de la tierra sobre los cuerpos, entonces P = m g
• Por lo regular y dado que la aceleración de gravedad es constante, la magnitud de la fuerza de gravedad equivale a la magnitud de la masa del objeto, cuerpo o segmento de éste.
32
• El peso de un cuerpo se define como la fuerza de atracción gravitatoria ejercida por la Tierra sobre él.
• Esta atracción gravitatoria no es simplemente una fuerza ejercida sobre el cuerpo como conjunto.
• Cada pequeño elemento del cuerpo (cada partícula componente del cuerpo) es atraído por la Tierra, y la fuerza llamada peso es en realidad la resultante de todas estas pequeñas fuerzas paralelas.
33
• La dirección de la fuerza gravitatoria sobre cada elemento de un cuerpo está dirigida verticalmente hacia abajo y por tanto , la dirección de la resultante es también vertical y dirigida hacia abajo, independiente de la orientación del cuerpo.
• Sin embargo la línea de acción de la resultante ocupará una posición diferente respecto al cuerpo cuando varíe la orientación de éste.
• No obstante, se encuentra que, sea cual fuere la orientación del cuerpo, existe siempre un punto fijo por el cual pasan todas estas líneas de acción, que corresponde al centro de gravedad del cuerpo.
34
Distribución del Peso Corporal
El peso de un cuerpo se distribuye siguiendo dos parámetros:
• El peso sobre los sistemas óseos se distribuye Histologicamente, siguiendo las líneas de fuerzas del hueso
• El peso se distribuye de acuerdo a las necesidades posturales, neutralizando el centro de gravedad.
35
Baricentro
Se define como la línea recta, cuya orientación espacial es vertical comunicando diferentes puntos corporales y que sin pasar necesariamente por el centro de masa, mantiene el equilibrio y la estabilidad del sistema.
Línea vertical de acción del peso.
36
Fuerzas Externas del sistema• Definen a todas las fuerzas que interactuan
con un sistema determinado y que son de naturaleza externa a dicho sistema.
• Un ejemplo de fuerzas externas, son las que representan el peso que depende de la fuerza de gravedad, el impulso, la inercia y las cargas externas.
• Las fuerzas externas interactuan y compiten con las fuerzas internas, que están representadas por la fuerza muscular.
37
Geometría Espacial
Sistemas de referencia Temporo Espacial:
Distancia:
• Separación relativa entre dos puntos
Tiempo:
• En relación a una acción o evento
Orientación:
• Relación corporal respecto al espacio
38
Parámetros geométricos:
• Descrito en el sistema cartesiano
• Los ejes y planos corporales, cambian respecto al espacio, dependiendo de la posición.
• Los ejes y planos espaciales no cambian.
39
EJES:
• Líneas que componen a los planos y que determinan su dirección.
• Se cortan perpendicularmente en un plano cartesiano, en tres direcciones
• se describen en el cuerpo como en el espacio

40
Ejes Corporales: Céfalo - Podálico Antero - Posterior Perlateral
Ejes Espaciales: Vertical Horizontal
41
Ejes Oseos:
• Definen a líneas teóricas e imaginarias longitudinales de los huesos.
Eje Longitudinal Anatómico:
• Es el eje real de un hueso y corresponde a la línea longitudinal que une los puntos medios de cada extremo articular del hueso, siguiendo su anatomía.
• No tiene utilidad para el estudio mecánico
42
Eje Mecánico:
• Es un eje imaginario de un hueso y corresponde a la línea longitudinal que une los puntos medios de cada extremo articular del hueso, en línea recta.
• Tiene utilidad para el estudio mecánico ya que corresponde al eje de las palancas.
43
PLANOS:
• Espacio en que ocurre una acción
• Sucesión de líneas o ejes paralelos
• Compuesto por dos ejes perpendiculares entre si un tercero lo corta perpendicularmente
44
Planos Corporales: Frontal: ejes CP y P / AP Sagital : ejes CP y AP / P Transversal : ejes AP y P / CP
Planos Espaciales: Verticales : ejes verticales / horizontal Horizontal :ejes horizontales / vertical
45
Postura y Posiciones Corporales
• Define las distintas posiciones y ubicaciones que adopta un cuerpo, extremidad o segmento en el espacio.
• Pueden ser estables o inestables, equilibradas o desequilibradas.
• Ubicación y orientación que toma en cuerpo y sus partes, con relación a los ejes y planos
46
Posición Anatómica:
• Posición neutra de amplia visión, pero no necesariamente funcional
Posición de Reposo:
• Corresponde a la posición de reposo articular y muscular de un segmento corporal, y depende de cada estructura.
Posición Funcional:
• Corresponde a la posición funcional de cada articulación y músculo, y depende de cada estructura.
47
Modelos Anatómicos Geométricos
• Corresponde a la forma de esquematizar didácticamente al esqueleto para su estudio.
Huesos Largos: con rectas Huesos Cortos: con triángulos Estructuras Voluminosas: con cuadriláteros.
48
Columnas• Corresponde a sistemas de estructuras
agregadas y organizadas secuencialmente en sentido vertical o axial.
• En el cuerpo se describen variados sistemas de columnas, entre los que destacan:
Posición de los huesos largos del cuerpo, en posición bípeda.
Raquis o Columna vertebral
49
Sistema Bicolumnar del Tronco
Columna Posterior:Columna VertebralMusculatura dorsalParrilla costal posterior
Columna Anterior:Viseras Parrilla costal anteriorFaja muscular abdominalPresión intraabdominal e intratoracica.
50
Estabilidad y Equilibrio de las columnas
Estabilidad Mecánica:
• Se define como la fuerza con que un cuerpo o columna, resiste a cualquier fuerza externa que tienda a volcarlo desestabilizarlo..
51
Equilibrio Mecánico:
• Se define como la fuerza horizontal mínima, aplicada a la altura del centro de masa de un cuerpo o columna, necesario para que este sea volcado.
52
• El equilibrio y la estabilidad, dependen:
Directamente de:
• Peso o masa corporal
• Distancia entre el baricentro y el perímetro de la base de sustentación o arista de rotación que corresponde al brazo de palanca del peso.
Inversamente de:
• La altura del centro de masa del cuerpo.
53
Es decir que:
• A mayor base, mayor estabilidad
• A mayor peso, mayor estabilidad
• A menor altura, mayor estabilidad
Bajo la formula:
E = Peso . Brazo
altura
54
Un cuerpo esta en equilibrio cuando:
• Esta en reposo
• Se desplaza con movimiento rectilíneo uniforme ( MUR )
• La resultante de la sumatoria del efecto de todas las fuerzas que sobre el actúan, es cero o nula.
55
• CLASIFICACIÓN DE EQUILIBRIO, DE ACUERDO A LA ESTABILIDAD
Equilibrio Estable:
• Cuando el centro de masa esta verticalmente bajo el eje de suspención.
• Cuando las fuerzas en posición desplazada, hacen volver a la posición de equilibrio.
• Cuando el cetro de masa esta cerca da la base de sustentación.
56
Equilibrio Inestable:
• Cuando la fuerza en posición desplazada, aumenta el desplazamiento
• El centro de masa no esta verticalmente el eje mecánico, es decir que el baricentro no es colineal al eje mecánico.
• El centro de masa esta en posición elevada respecto de la línea de suspención
57
Resistencia Axial de Columnas
• La resistencia a las cargar axiales sobre las columnas, se relaciona con la capacidad de resistir o amortiguación.
• La capacidad de resistencia se relaciona con la presencia de curvas y su profundidad, lo que queda expresado en la ecuación de Delmas de la siguiente forma:
58
• Resistencia es igual al cuadrado del numero de curvas mas una constante igual a la unidad ( 1 ).
2
R = (N° curvas) + 1
59
Cadenas• Corresponde a sistemas de estructuras
agregadas y organizadas secuencialmente en cualquier dirección y sentido.
• Describe un sistema de agregación dinámico.
• En el sistema locomotor se describen dos sistemas de cadenas:
Cadenas Cinéticas Cadenas Miocineticas
60
Cadenas Cinética o Cinematicas
Definición:
• Combinación de varias articulaciones consecutivas y los correspondientes músculos, como unidades funcionales motoras de complejos procesos de movimientos y acciones motoras, las que mediante una acción en conjunto al sistema nervioso central y periférico, posibilitan el desarrollo motor.
61
• Corresponden a eslabones óseos unidos en cadenas articulares vecinas, con un fin determinado.
• Las acciones motrices se describen basadas en las cadenas cinéticas, lo que simplifica su descripción y análisis, por lo que se consideran como una unidad motora funcional
62
Clasificación:
• La clasificación obedece a dos criterios, los que son de acuerdo a la continuidad de los sistemas y a la presencia de cargas.
63
Cadena Cinética Abierta:• Cuando el ultimo eslabón o distal, se
encuentra libre y no presenta ligadura a distal.
• Permite la realización de todos los movimientos articulares
• no existe interferencia o impedimento para la ejecución de los movimientos
• Permite el análisis articular clásico, de proximal a distal.
• Implica coordinación de movimiento.
64
Cadena Cinética Cerrada:• Cuando el ultimo eslabón o distal, se
encuentra fijo y por lo tanto presenta ligadura hacia distal.
• Restringe la posibilidad y la libertad de movimiento, los que se producen en las articulaciones intermedias.
• Presenta movimientos estereotipados, menos coordinados, con acciones motoras mas simples
• Permite análisis de distal a proximal, con análisis muscular mas complejo, de máximo reclutamiento.
65
Cadena Cinética Frenada:• Cuando el ultimo eslabón o distal, debe
vencer una resistencia agregada al peso corporal o del segmento.
• Pueden realizarse contracción concéntrica o excéntrica
• Puede ser una cadena abierta o cerrada.
66
Cadena Cinética Libre:• Cuando el ultimo eslabón o distal, no
presenta resistencia agregada al peso corporal o del segmento.
• Pueden realizarse contracción concéntrica o excéntrica
• Puede ser una cadena abierta o cerrada.
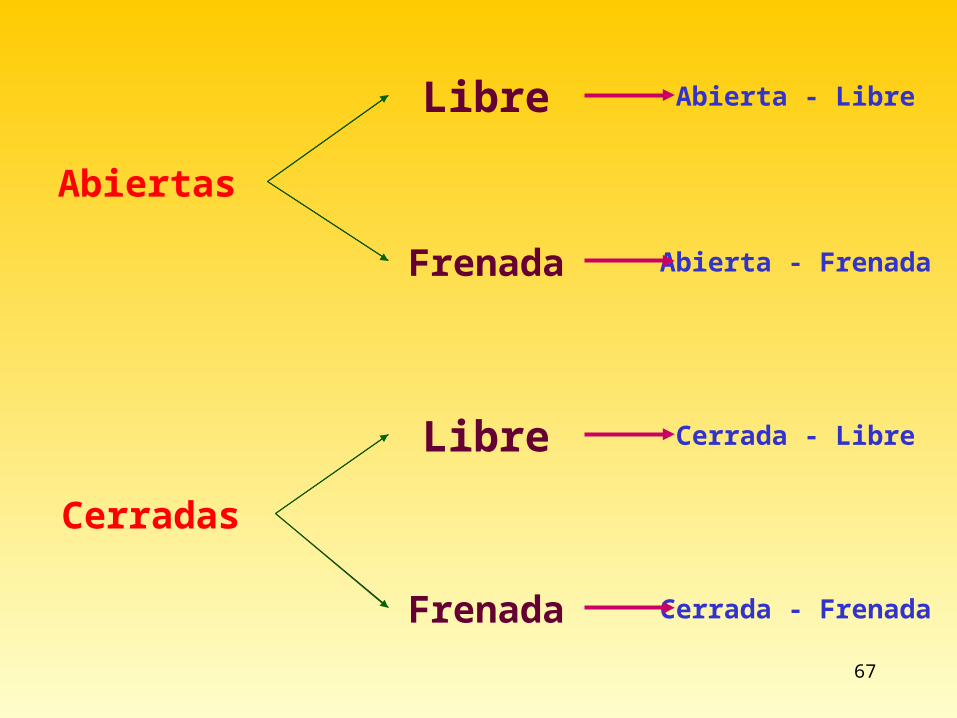
67
Abiertas
Cerradas
Libre
Frenada
Libre
Frenada
Abierta - Libre
Abierta - Frenada
Cerrada - Libre
Cerrada - Frenada
68
Cadenas Miocineticas o Miocinematicas
• Corresponde al trabajo muscular desarrollado en secuencia interdependiente de diferentes grupos musculares para una acción motriz determinada.
• Corresponde a trabajo de grupos sinergistas y agonistas de distinta importancia
• el aumento de la carga, activa mayor compromiso de grupos musculares de la cadena.
69
“ La fortaleza de toda cadena, depende de la fortaleza de su
eslabón mas débil “
71
Palancas Definición Elementos Clasificación Movimiento
• Momento
• Equilibrio
72
… “ Dadme un punto de apoyo y moveré el mundo “ …
73
PalancasDefinición:
• Sistema de transmisión de energia constituido por un elemento capas de rotar o girar en torno a un eje o punto de giro, determinando un momento de las fuerzas que sobre ella actúan, ejerciendo un efecto de torque, dandole la capacidad de transmitir dicho efecto a otros cuerpos con los cuales interactua.
74
Palancas Oseas:
“Los huesos del esqueleto, al moverse en giro, ejercen acción de palanca, tras la acción de las fuerzas musculares que sobre ellos actúan, en contra de las fuerzas de resistencias que sobre ellos también actúan”
75
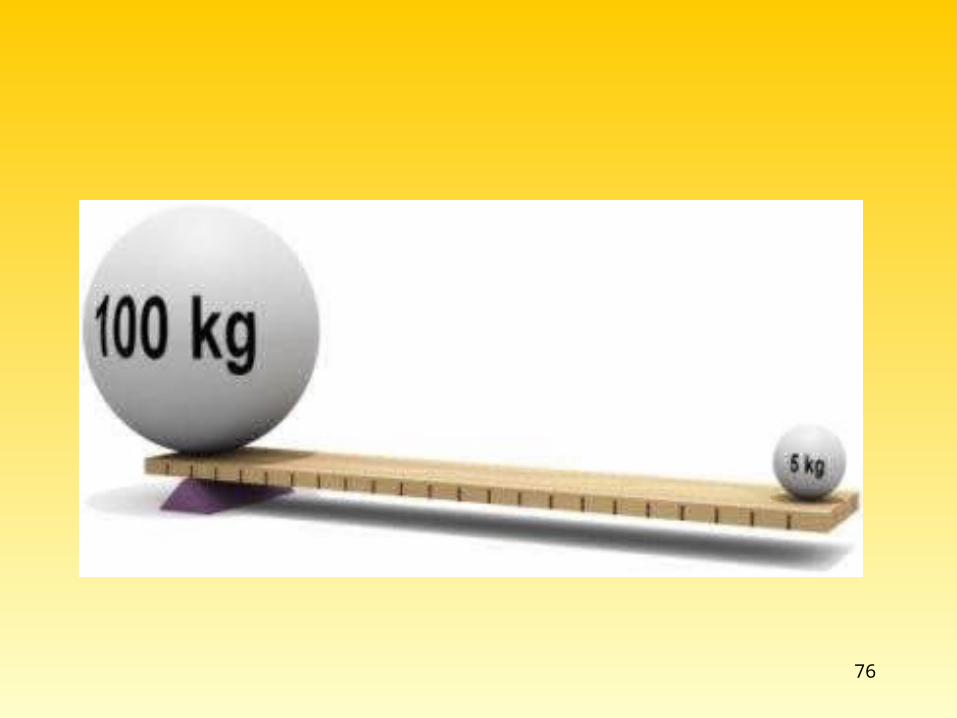
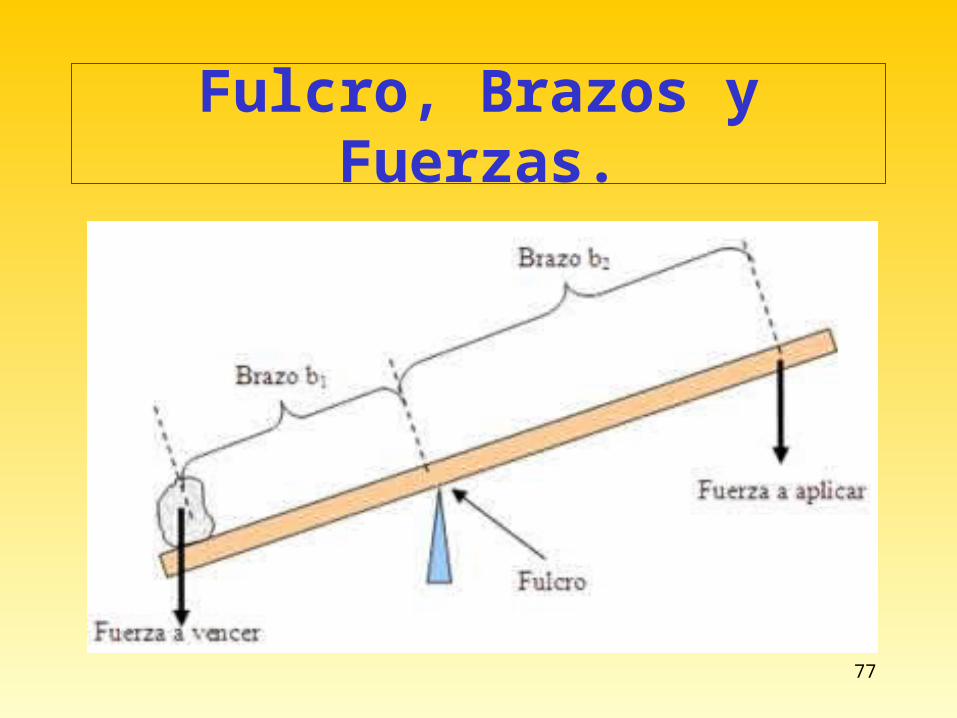
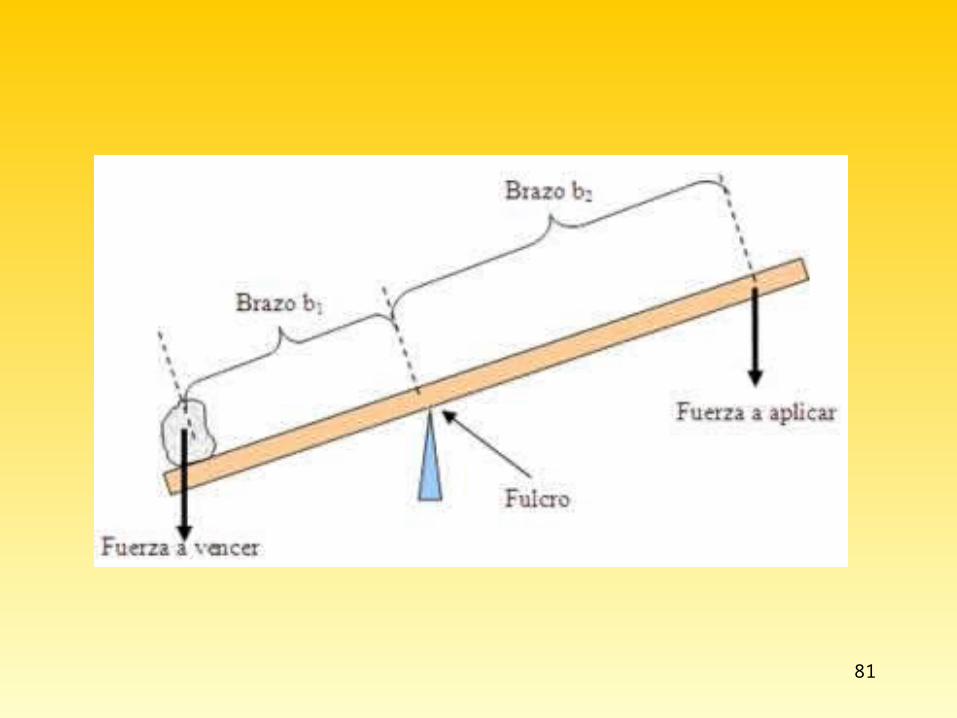
Elementos de las Palancas:
• Pivote o Fulcro: Punto de giro
• Fuerzas: De variados efecto, que se opone o se
agrega al sistema ( potencia, cargas o
resistencias )
• Brazo : Distancia en línea recta entre el punto de
aplicación de una fuerza, hasta el punto
de giro, propio de cada fuerza.
76
77
Fulcro, Brazos y Fuerzas.
78
Eje o Centro de Rotación o de Giro
• Eje o centro de rotación o giro, representa la línea o punto imaginario alrededor del cual un objeto, cuerpo o segmentos de éste rotan o giran.
• Puede hallarse dentro del cuerpo denominándose eje interno, por ejemplo, un bailarín girando (eje vertical que atraviesa el centro de gravedad).
• Puede encontrarse fuera del cuerpo denominándose eje externo, tal como en un gimnasta que gira alrededor de una barra horizontal.
• Así también, las articulaciones sirven de eje de rotación para los segmentos corporales, tal como la pierna rota alrededor de un eje en la articulación de la rodilla.

79
80
Clasificación:
• La clasificación se determina de acuerdo a los principios mecánicos y al efecto que ejercen.
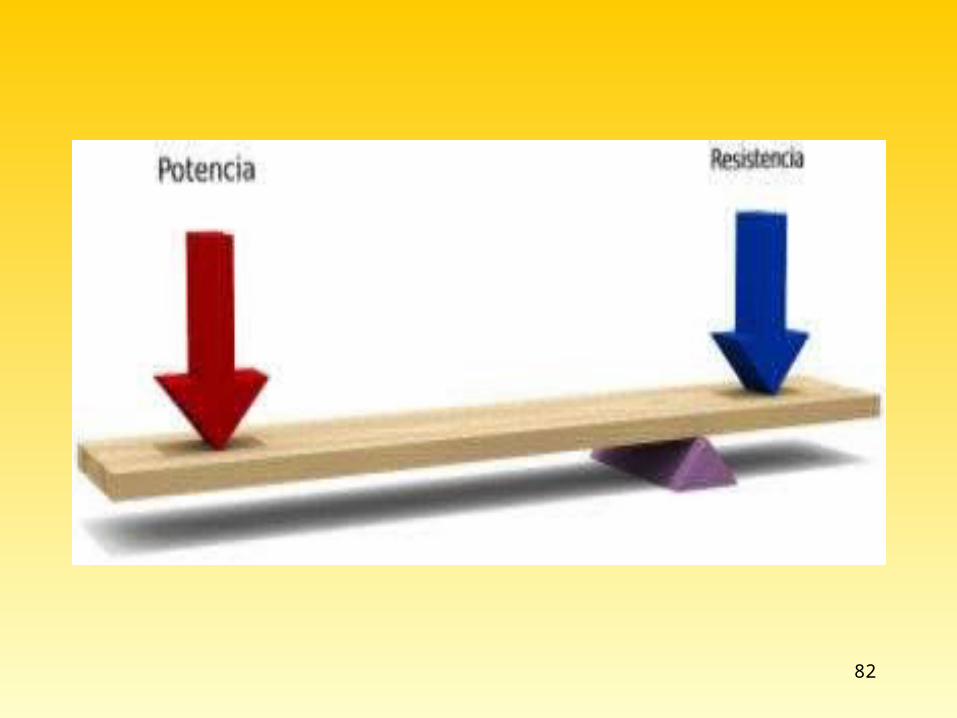
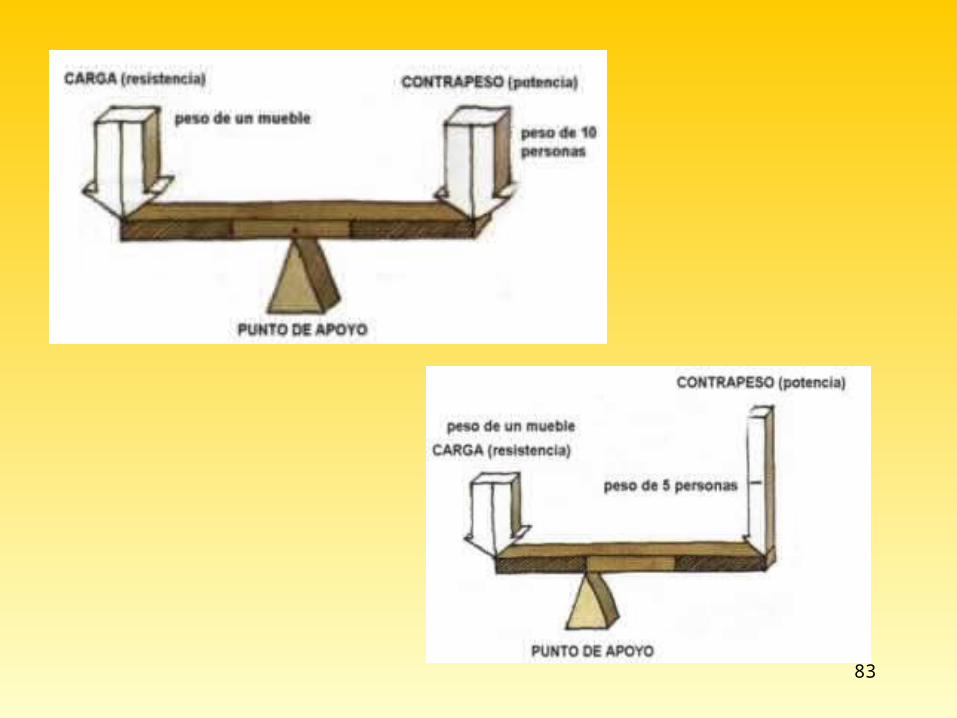
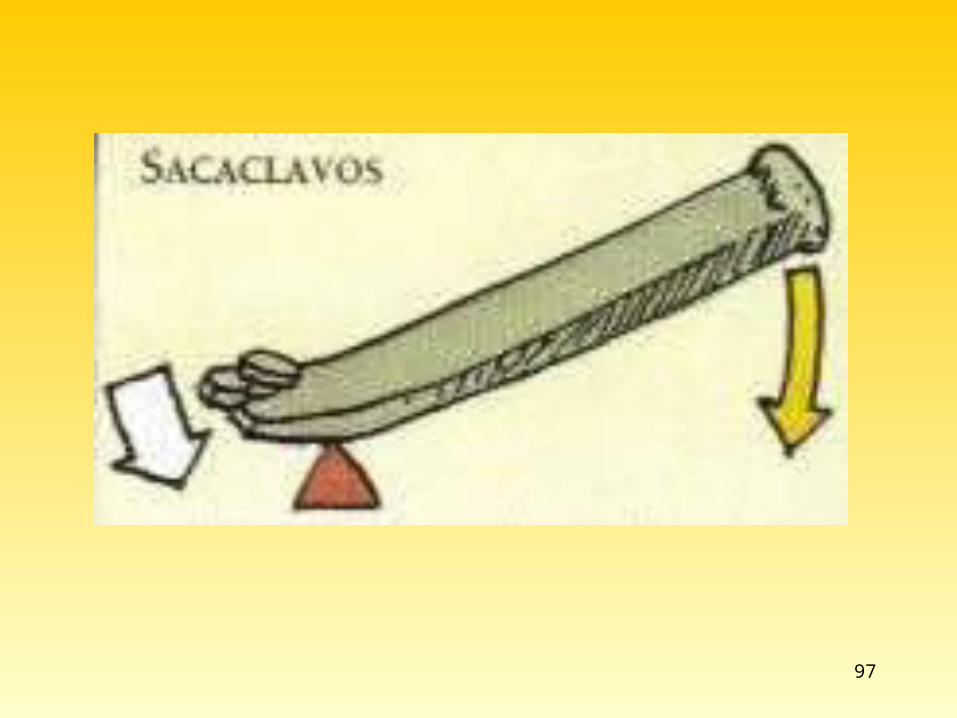
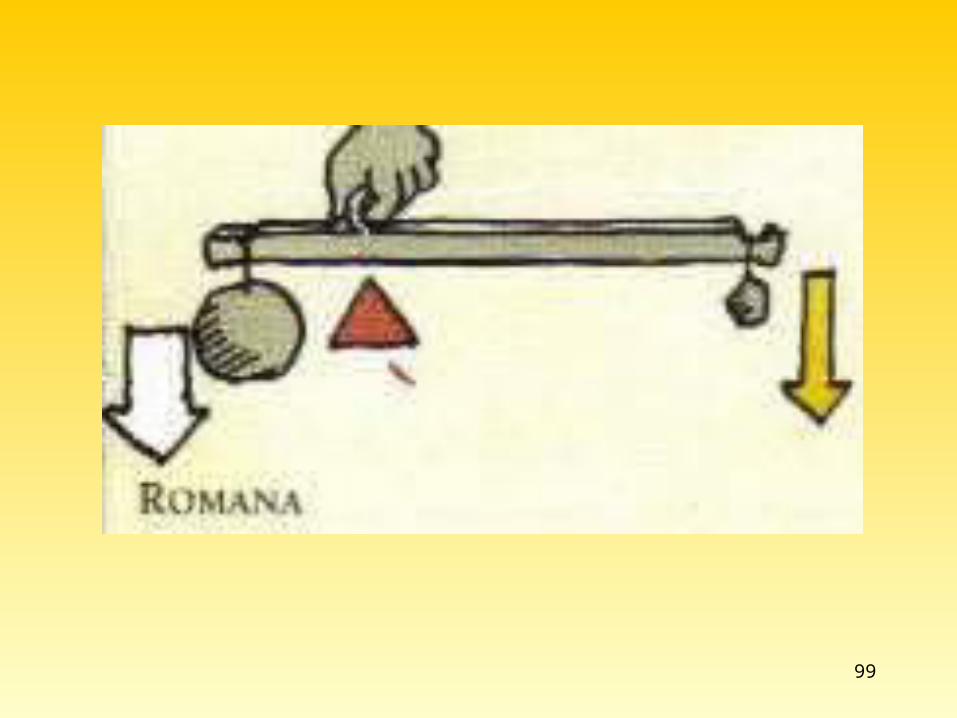
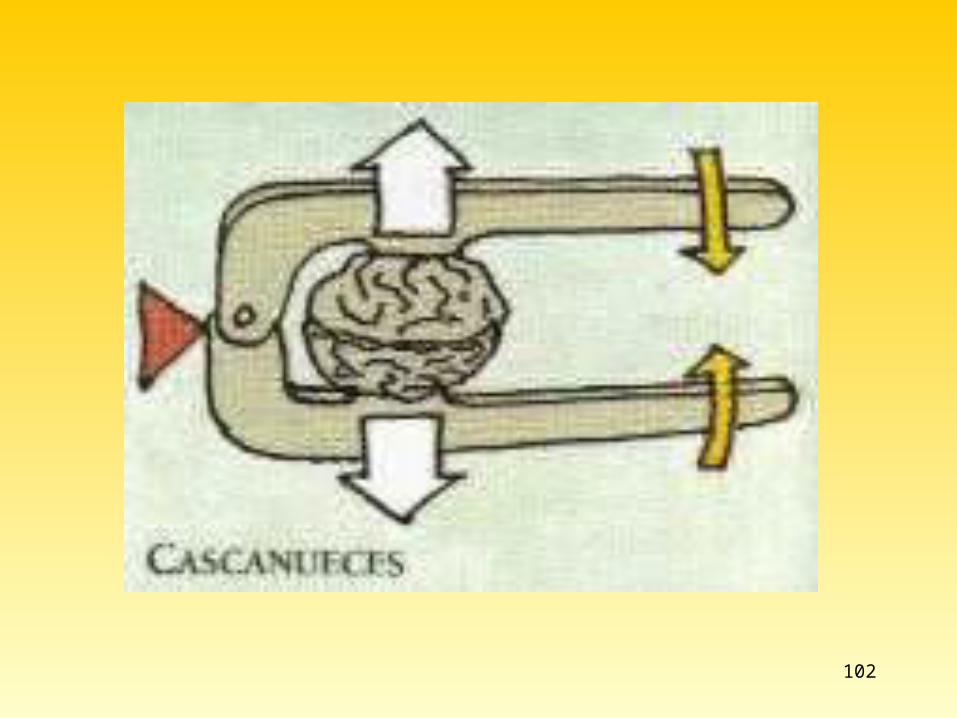
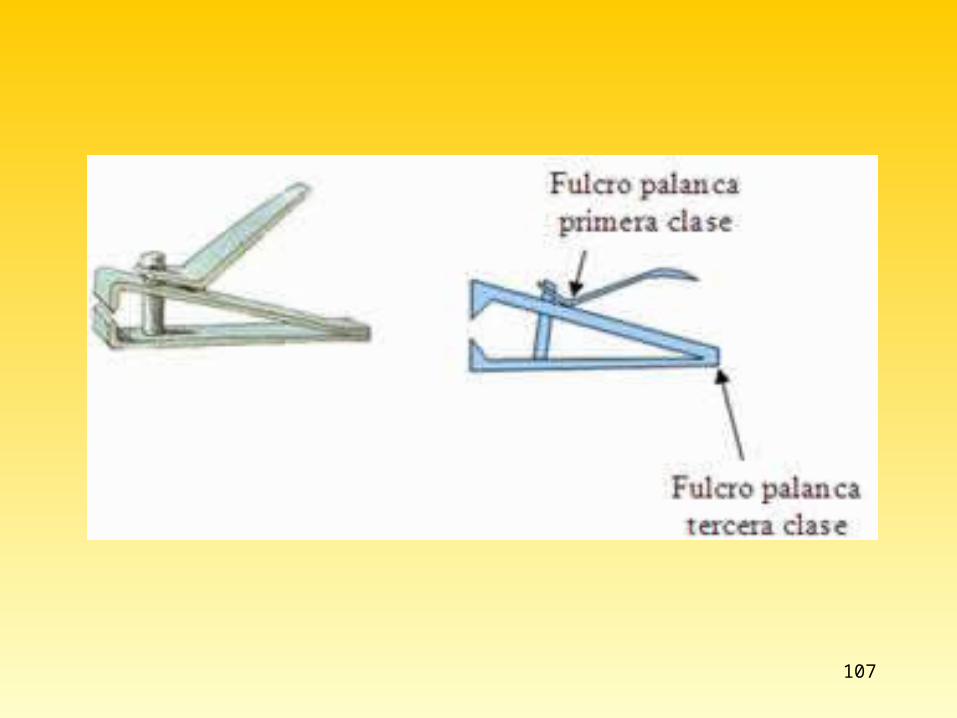
Interapoyo o de primer grado:• Fulcro entre las fuerzas de potencia y
resistencia
• Palanca de equilibrio
• Ejemplo: Cabeza sobre el raquis cervical, en el plano sagital
81
82
83
84
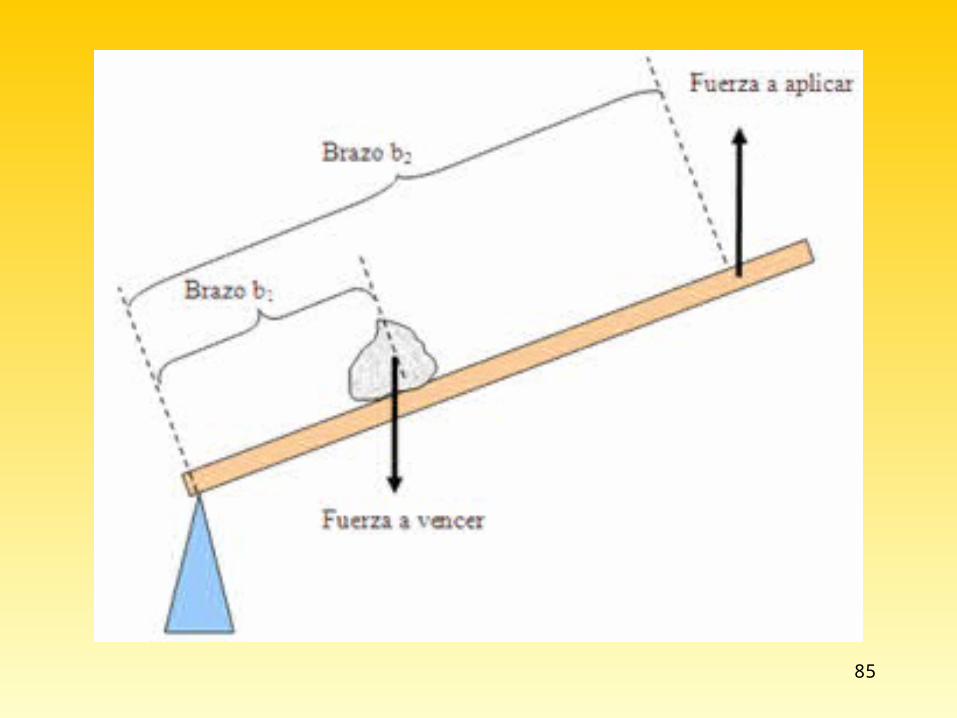
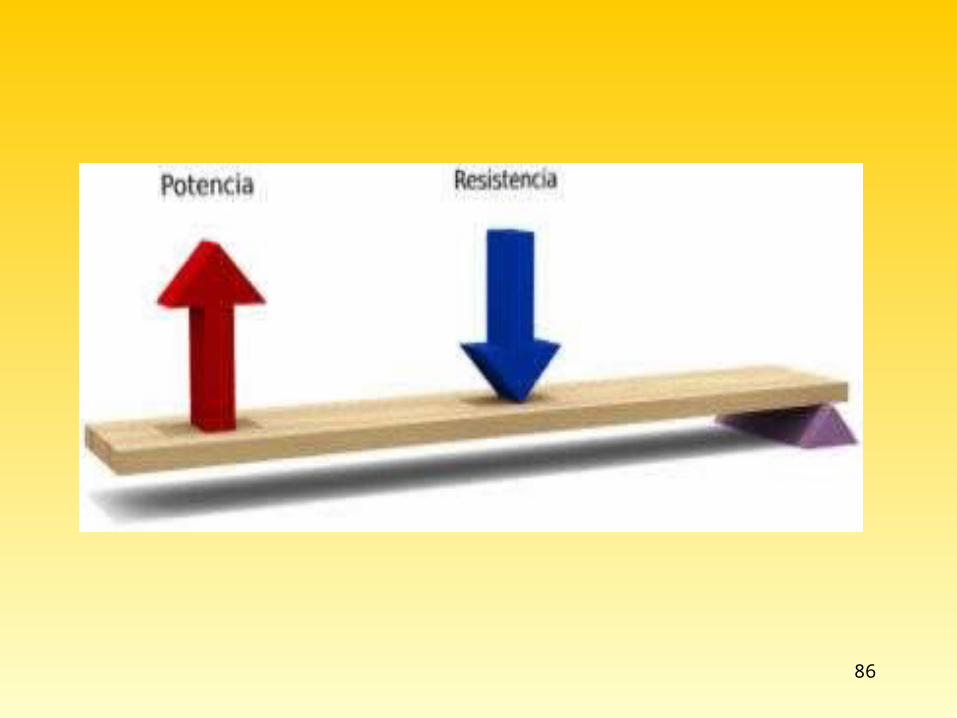
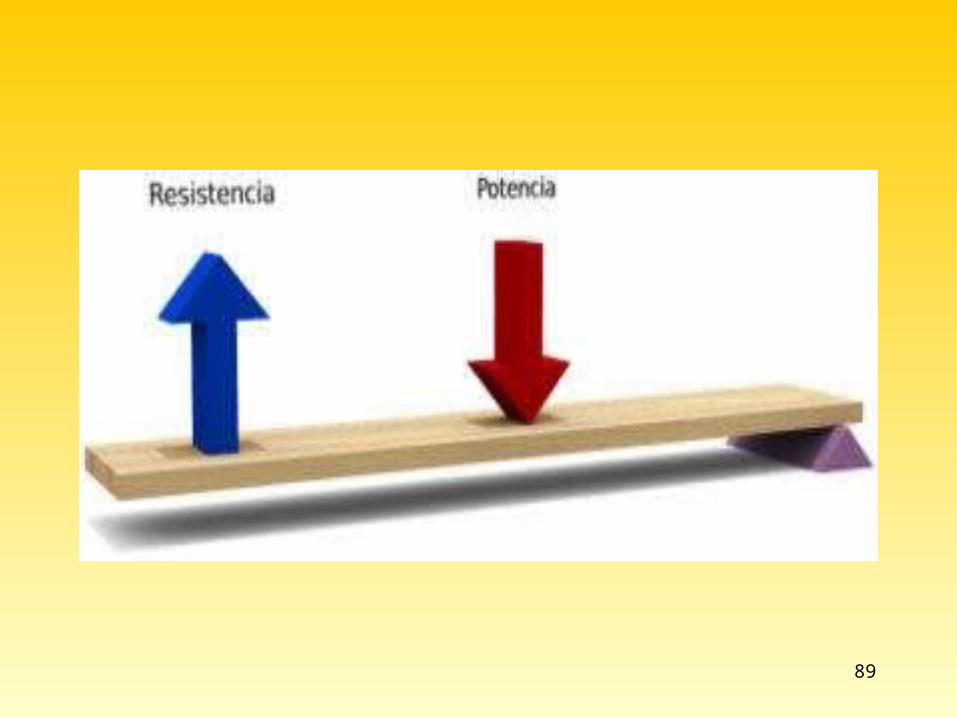
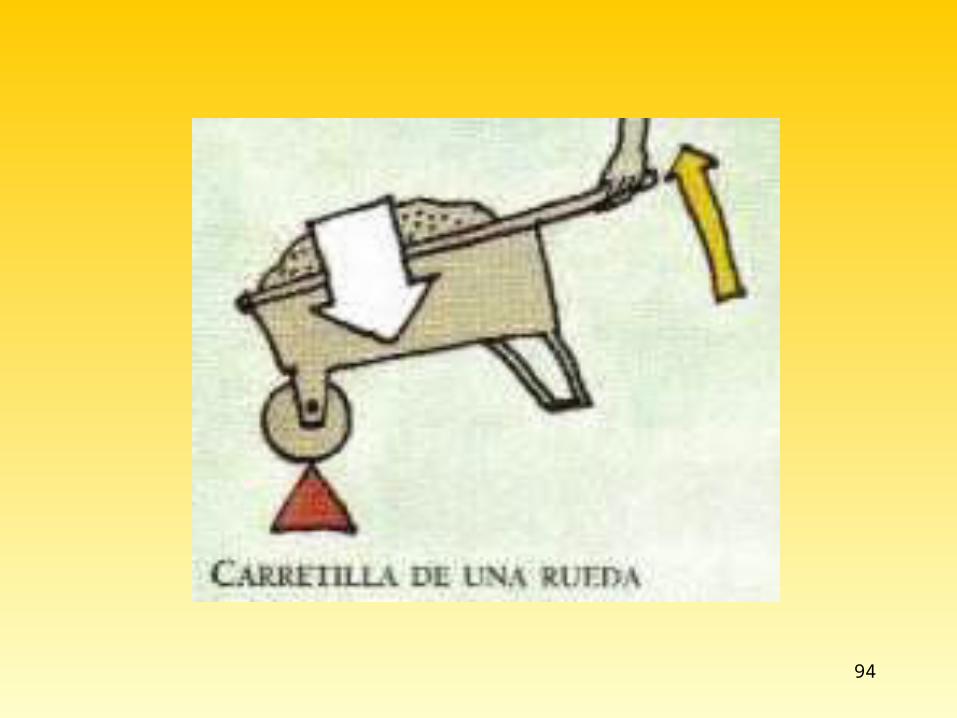
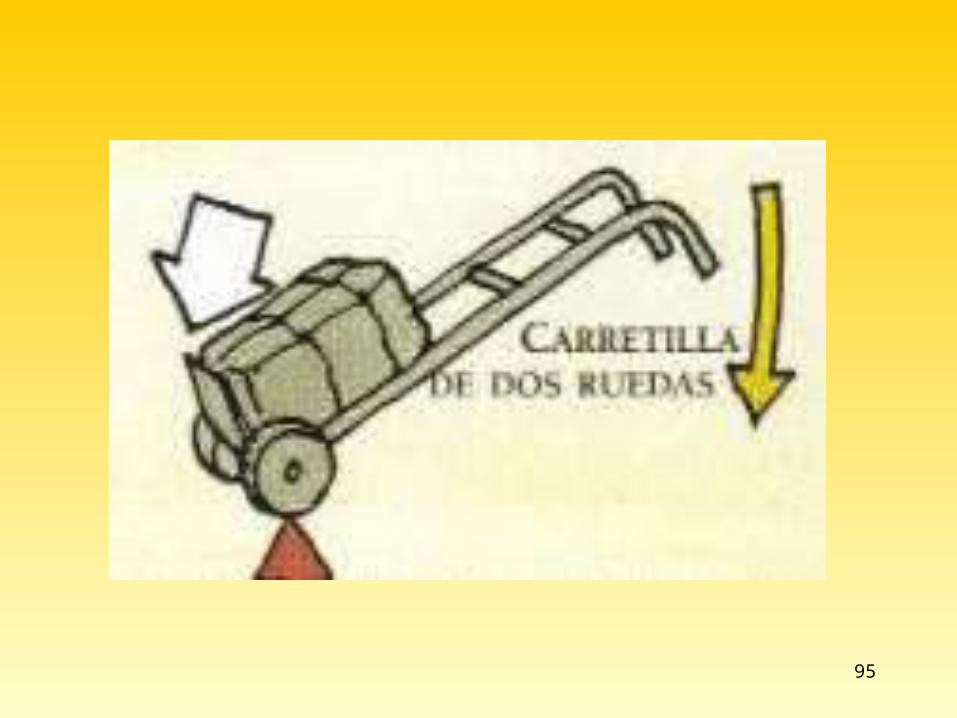
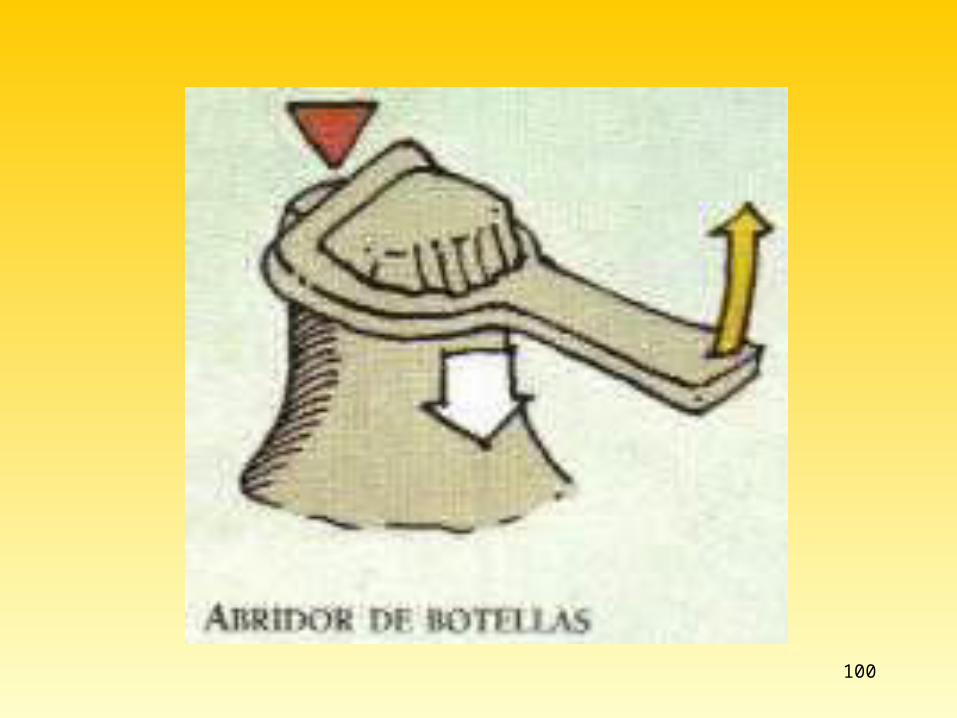
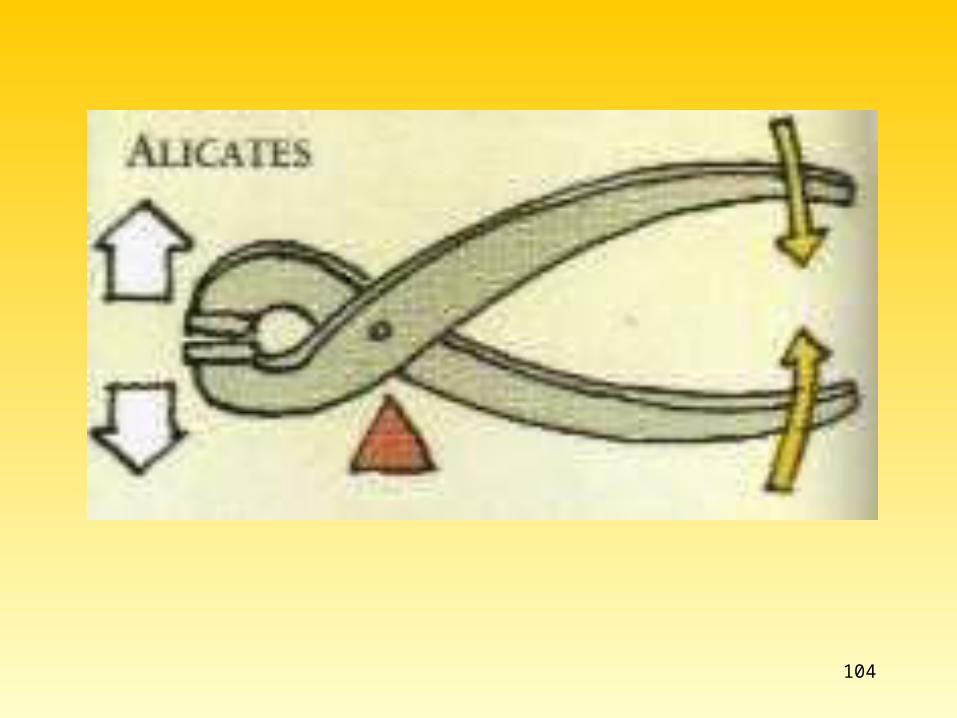
Interresistencia o de segundo grado:
• Resistencia entre el fulcro y la potencia
• Palanca de velocidad
• Ejemplo: Pie en el plano sagital, para el movimiento de plantiflexion o extensión.
85
86
87
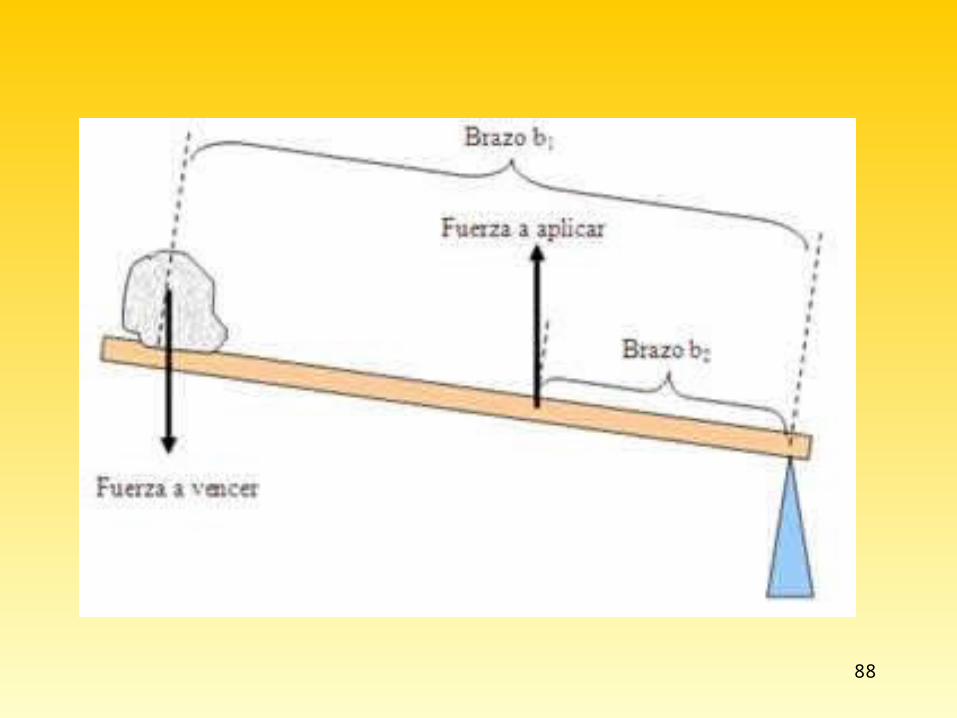
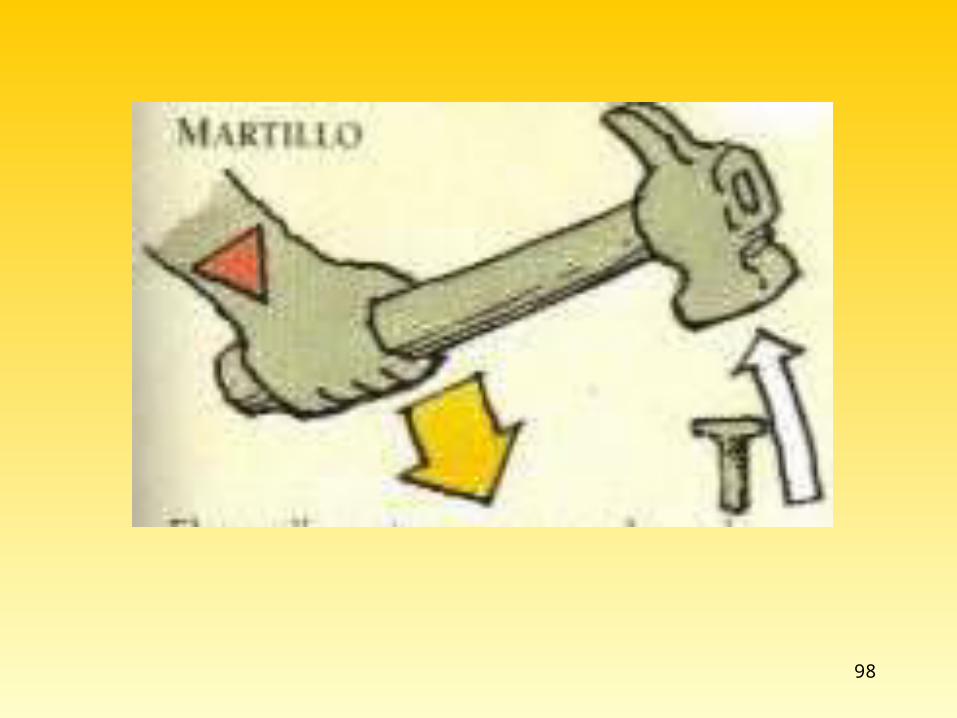
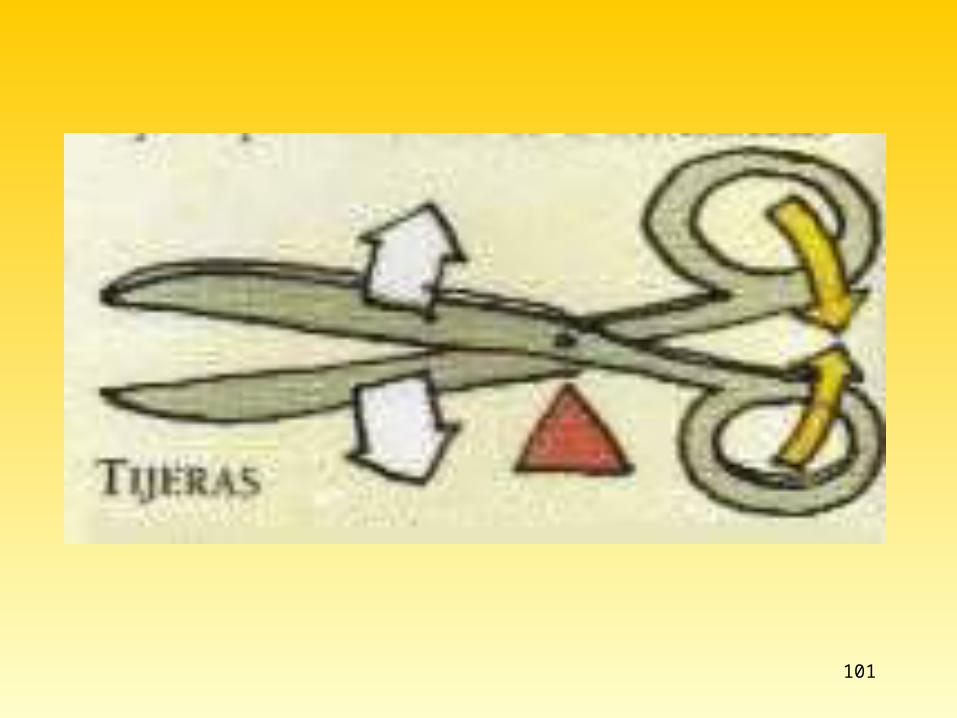
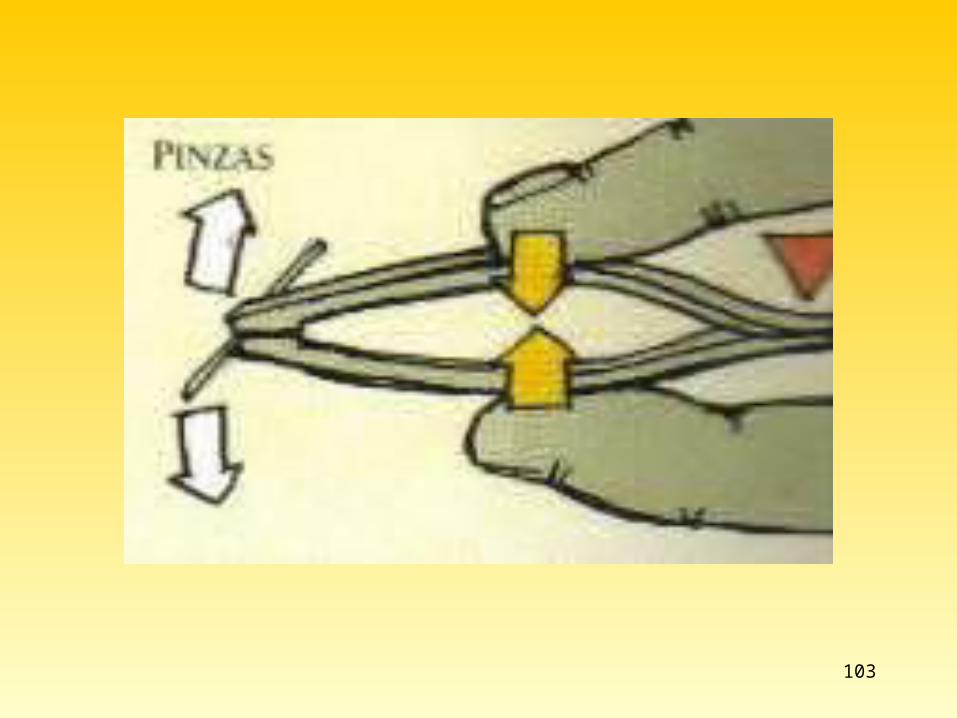
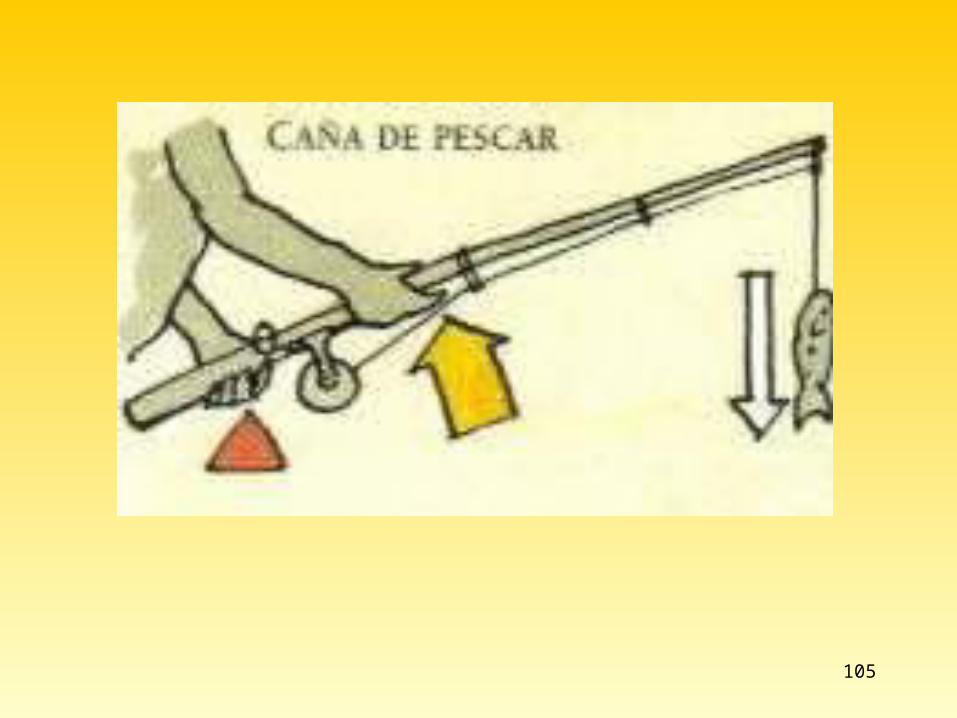
Interpotencia o de tercer grado:• Potencia entre el fulcro y la resistencia.
• Palanca de potencia y fuerza.
• Ejemplo: Articulación del codo, para el movimiento de flexión.
88
89
90
Sistemas de Palancas Simples y Combinadas:
• Representan casos en los cuales un sistema de palancas esta constituido por una o mas palancas simultáneamente.
• Ejemplos:

91

92
93
94
95

96
97
98
99
100
101
102
103
104
105

106
107
108
Movimiento de Palancas: Momento de una Fuerza
Vectores: Definición, Clasificación y Operación Angulo de incidencia y descomposición vectorial de
las fuerzas Conceptualizacion:
Fuerza, Potencia, Energia y Trabajo, Peso, Presión, Impulso, Inercia, Energia Potencial y Cinética, Momento y Torque
Equilibrio Mecánico de las Palancas
109
VectoresDefinición:
• Una magnitud vectorial, es aquella que determina y define tanto su valor como su efecto.
• Ejemplo: Fuerza, Velocidad, etc.
Elementos:Magnitud (escalar)Dirección ( ángulo de incidencia)Sentido (punta de flecha)
110
Clasificación:
• Dependerá de la relación espacial entre dos o mas vectores
Vectores Coplanares:
• Son los que se ubican en un mismo plano
• Los vectores Coplanares pueden desplazarse en el plano, en sentido lineal o lateral, sin cambiar su dirección , sentido ni magnitud.
111
Vectores Colineales:
• Son aquellos que se ubican en una misma línea de acción, por lo tanto poseen la misma dirección, pero no necesariamente el mismo sentido.
Vectores Concurrentes:
• Son aquellos que se cortan en algún punto del plano, por lo tanto son Coplanares pero no colineales
• Poseen distinta dirección y sentido.
112
Operación vectorial:
• La suma o resta de dos o mas vectores, que significa adicionar o contrarrestar sus efectos, depende del tipo de relación espacial que tengan los vectores, así:
113
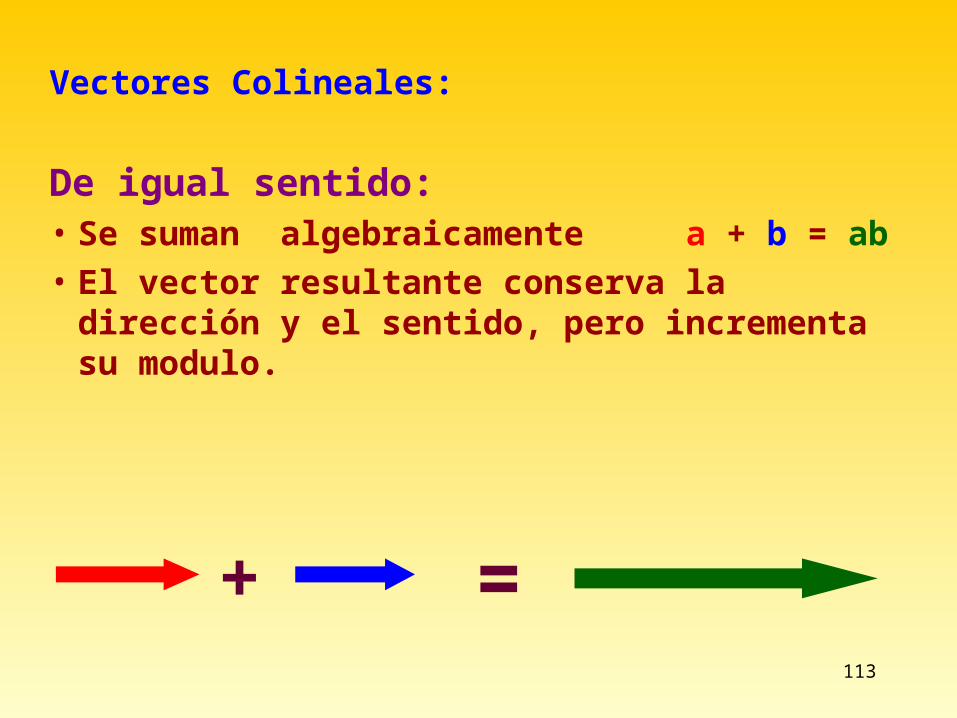
Vectores Colineales:
De igual sentido: • Se suman algebraicamente a + b = ab
• El vector resultante conserva la dirección y el sentido, pero incrementa su modulo.
+ =
114
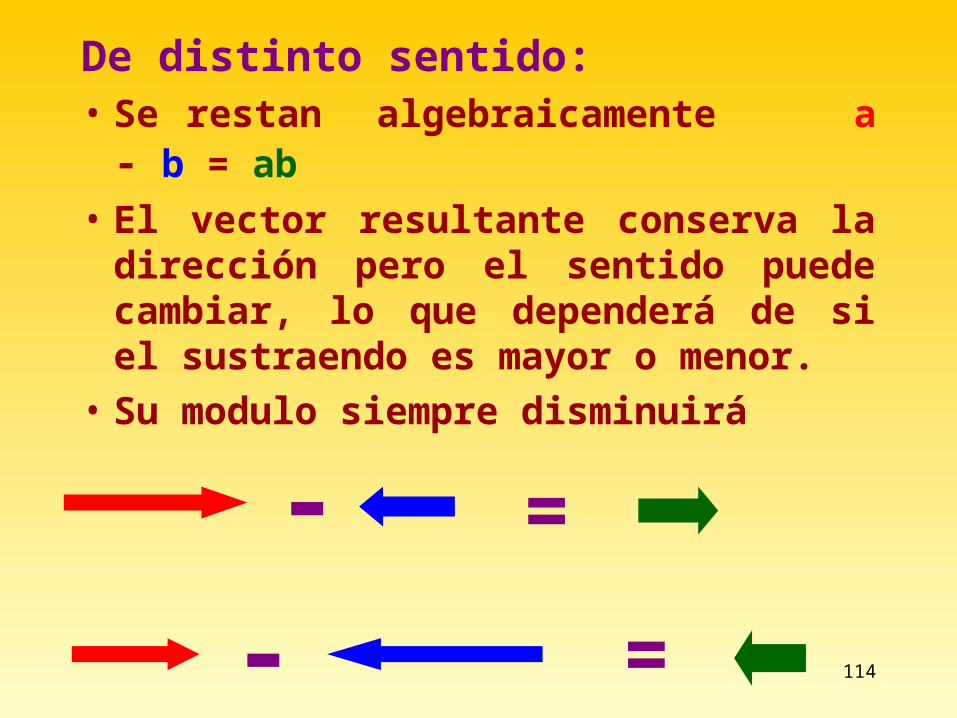
De distinto sentido: • Se restan algebraicamente a - b = ab
• El vector resultante conserva la dirección pero el sentido puede cambiar, lo que dependerá de si el sustraendo es mayor o menor.
• Su modulo siempre disminuirá
- =
- =
115
Vectores concurrentes:
• No se pueden operar algebraicamente
• se utilizan dos metodologías
Métodos Gráficos GeométricosMétodos Trigonométricos
116
Métodos Gráficos o Geométricos
• Solamente sirven para determinar esquemáticamente la dirección y el sentido
• Para la suma, todos los vectores conservan su sentido
• Para la recta, los vectores sustraendo, se consideran negativos, por lo tanto se le invierte el sentido
117
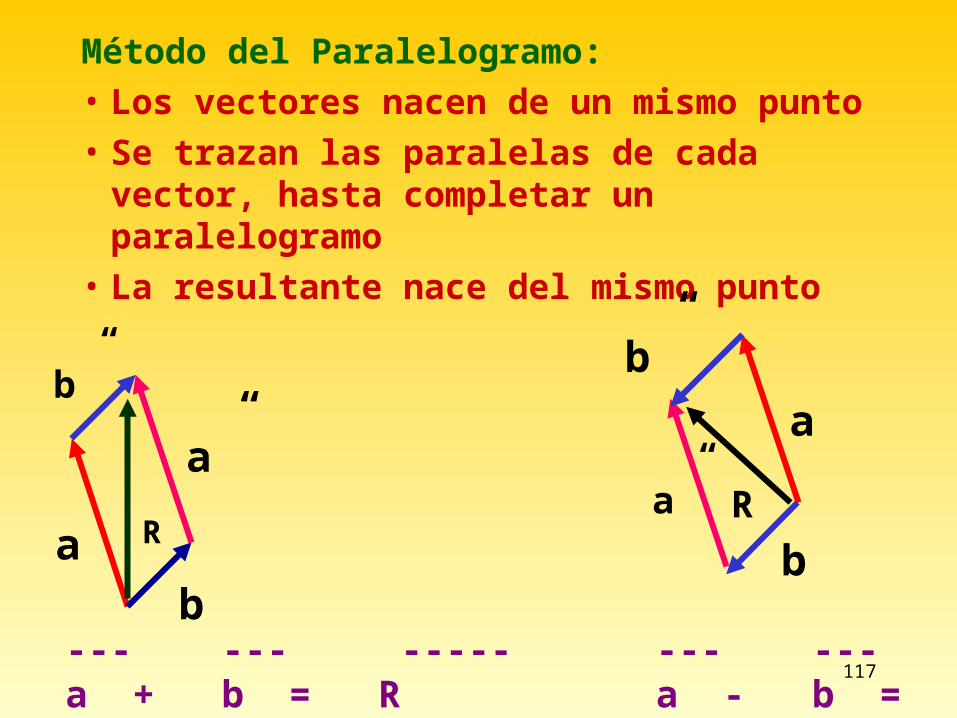
Método del Paralelogramo:
• Los vectores nacen de un mismo punto
• Se trazan las paralelas de cada vector, hasta completar un paralelogramo
• La resultante nace del mismo punto
a
a”
b
b”
R
--- --- -----a + b = R
--- --- -----a - b = R
a
a”
b
b”
R
118
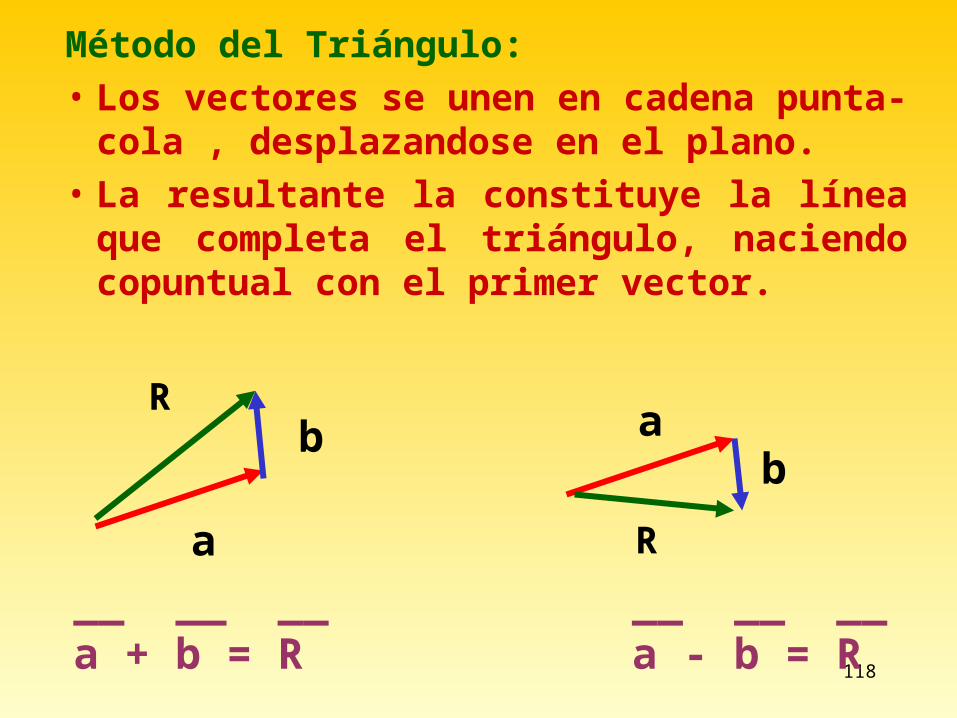
Método del Triángulo:
• Los vectores se unen en cadena punta-cola , desplazandose en el plano.
• La resultante la constituye la línea que completa el triángulo, naciendo copuntual con el primer vector.
a
bR
__ __ __a + b = R
ab
R
__ __ __a - b = R
119
Métodos Trigonométricos:• Sirven para determinar el valor numérico,
tanto del modulo como de la dirección del vector resultante.
• Operan tanto para los métodos del triángulo, como para el paralelogramo.
• Se basa en variadas formular trigonométricas y geométricas, dependiendo del tipo de ángulo que se constituyan en las figuras geométricas.
120
Teorema de Pitagoras:
• Plantea que para un triángulo rectángulo, la suma de los cuadrados de cada uno de los lados, es igual al cuadrado de la hipotenusa.
2 2 2
A + B = C
121
Descomposición Cartesiana:
• Consiste en llevar a un plano cartesiano a todos y cada uno de los vectores que se desean operar y descomponerlos en a lo menos dos ejes para luego sumar algebraicamente todas las componentes de cada uno de los ejes, quedando finalmente solo dos vectores, uno por cada eje, los que se cortan en un ángulo recto, por lo que procede utilizar el teorema de Pitagoras, entre otros.
122
Funciones Trigonométricas:
• F. Seno del ángulo = Cateto opuesto
Hipotenusa
• F. Coseno del ángulo = Cate. Adyacente
Hipotenusa
• F. Tangente del ángulo = Cate. Opuesto
Cate. Adyacente
123
Teorema de los triángulos:
• En un triángulo cualquiera de ángulos conocidos, se establece que:
• El cuadrado de uno de sus lados, es igual a la suma de los cuadrados de los otros dos lados, menos el doble del producto entre los otros dos lados y el coseno del ángulo opuesto al lado desconocido.
124
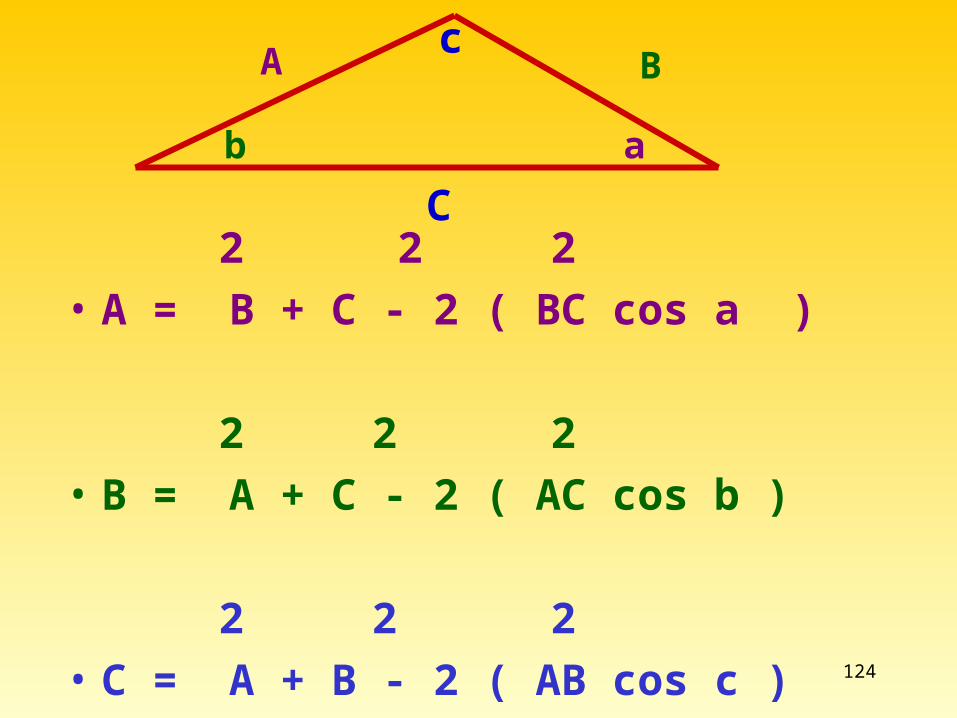
2 2 2
• A = B + C - 2 ( BC cos a )
2 2 2
• B = A + C - 2 ( AC cos b )
2 2 2
• C = A + B - 2 ( AB cos c )
A
C
b
c
a
B
125
Angulo de Incidencia y Descomposición Vectorial de las Fuerzas
• Las fuerzas que actúan sobre una palanca o un cuerpo determinado, por ser magnitudes vectoriales, lo hacen con cierta intensidad o modulo, en cierta dirección y cierto sentido.
126
• El modulo esta representado por el valor absoluto o escalar.
• La dirección de esta, representada por el ángulo de incidencia con que el vector cae sobre la palanca o el cuerpo.
127
• El sentido del vector, esta representado por la punta de la flecha con que se simboliza el vector y determina si el efecto del vector es concurrente, es decir que llega hacia el cuerpo o palanca, o es divergente, es decir que se aleja del cuerpo o palanca.
128
• Como todo vector, la fuerza se la puede descomponer en un plano cartesiano, determinando dos componentes, una en el eje “x” y otra en el eje “y”
129
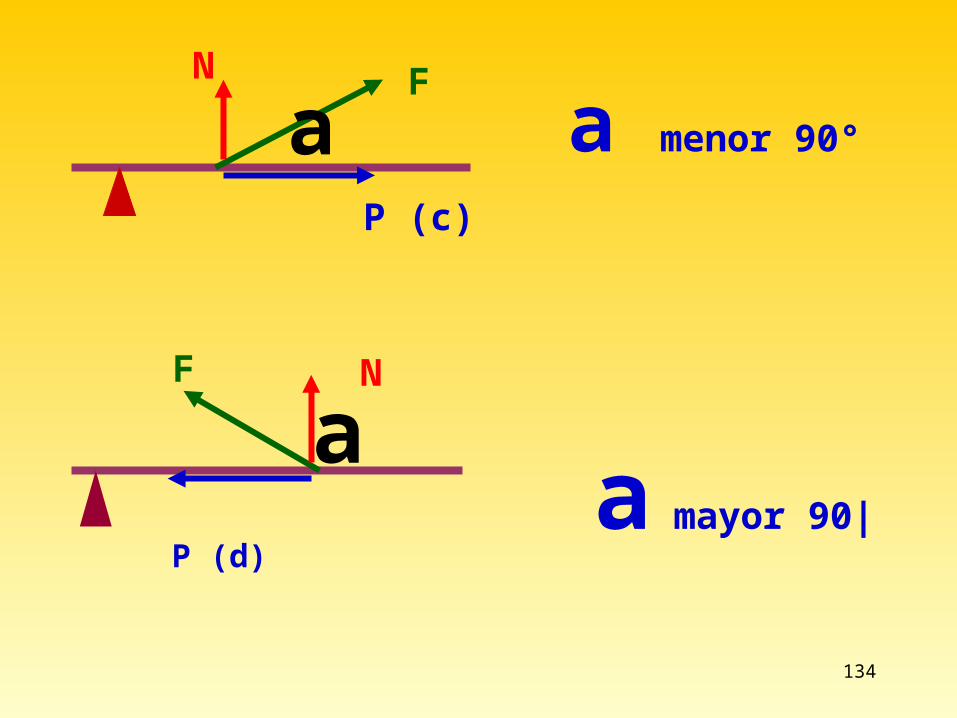
• La incidencia del vector sobre la palanca o cuerpo, determina que el vector presenta dos componente: Una paralela y otra perpendicular al eje de la palanca.
Componente Paralela al eje de la palanca, por lo tanto su efecto sobre esta será compresivo o distractivo, dependiendo si el ángulo es mayor o menor de 90°
130
Componente Perpendicular o Normal ( N ), que incide con un ángulo de 90°, tiene un efecto rotatorio o de giro de la palanca en torno a algún eje o punto en donde la palanca este pivotando.
131
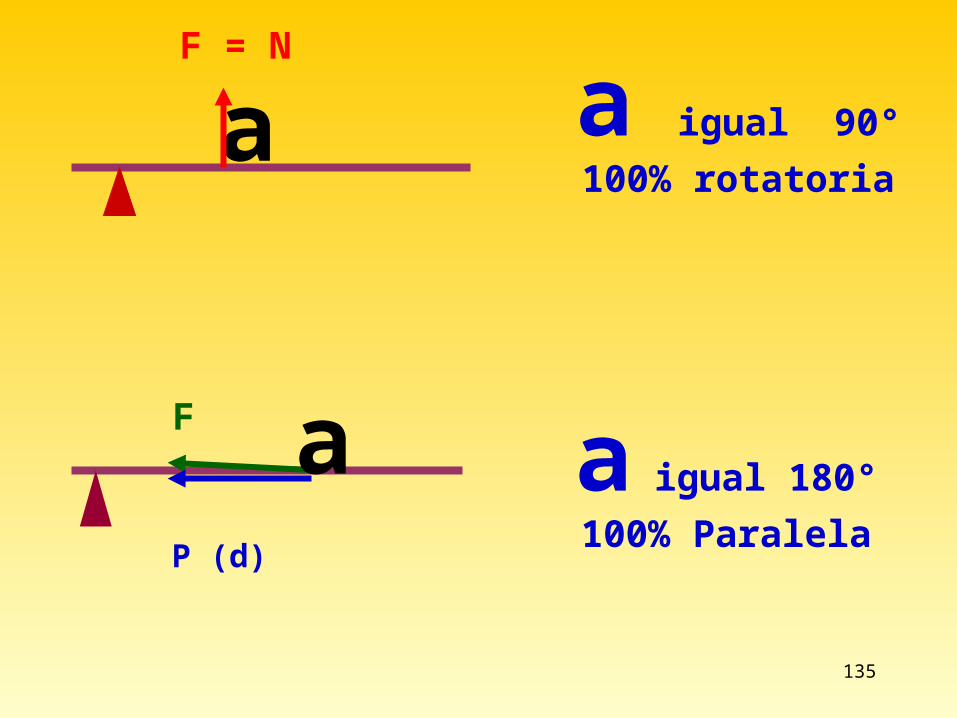
• Si el ángulo de incidencia es igual a 90°, la componente paralela será nula y por lo tanto todo su acción tendrá un efecto rotatorio sobre la palanca.
• Por el contrario, si el ángulo de incidencia es de 0° o de 180°, todo su acción tendrá un efecto paralelo, compresivo o distractivo, mientras que la componente rotatoria será nula.
132
• En resumen, el efecto rotatorio o de movimiento de una fuerza sobre una palanca, depende de su ángulo de incidencia
• Será mayor mientras mas cerca de los 90° y viceversa, siendo máximo a los 90° y nulo a los 180°.
133
• En resumen, el efecto de una fuerza sobre un cuerpo o palanca depende de:
IntensidadAngulo de incidencia ( inserción )SentidoPunto de aplicaciónPosición de la palanca en el espacio.
134
aF
P (c)
N
a menor 90°
NF
P (d)
aa mayor 90|
135
a a igual 90°
100% rotatoria
F
P (d)
a a igual 180°
100% Paralela
F = N
136
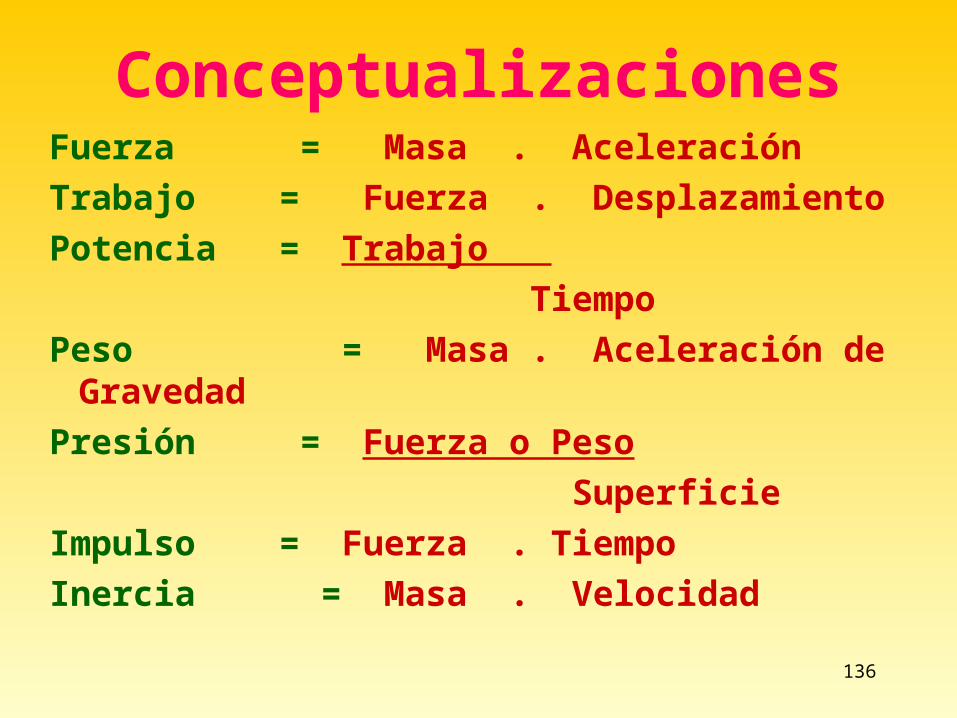
ConceptualizacionesFuerza = Masa . Aceleración
Trabajo = Fuerza . Desplazamiento
Potencia = Trabajo
Tiempo
Peso = Masa . Aceleración de Gravedad
Presión = Fuerza o Peso
Superficie
Impulso = Fuerza . Tiempo
Inercia = Masa . Velocidad
137
Formas de Energía :De movimiento: a mayor velocidad, mayor
energiaDe altura: a mayor altura, mayor energiaDe Deformación o ElásticaQuímica o CombustibleNuclear o Combustible
138
Energia Potencial:
• Estado de latencia o almacenamiento determinado por factores de forma, Posición y composición
Ep = Peso . Altura
• Se clasifica según la fuente en Gravitatoria, Elástica o Química.
139
Energia Cinética :
• Define un estado activo, dinámico o de movimiento, determinado por la velocidad que adquiere un cuerpo
• Aplicando parámetros determinados, se define como el trabajo “T” necesario para que un cuerpo de masa “m” , adquiera en movimiento una velocidad “V” , aplicando una fuerza “F”, durante un tiempo “t” , para alcanzar una aceleración “a” , en una trayectoria “d” .
Ec = masa . Velocidad . Velocidad
2
140
• De acuerdo al principio de conservación de la energia:
Si Ep es máxima, Ec es nulaSi Ec es máxima, Ep es nula
E Mecánica = Ep + Ec
141
Principios de Newton:
• Principio de Inercia
• Principio de Masa
• Principio de Acción y Reacción
142
Momento de una fuerza o Torque:
• El Momento se define como la tendencia de una fuerza a producir giro o rotación de una palanca en torno a un eje o punto de giro
• El Torque describe el efecto mecánico de giro o rotación que produce el momento, producto de la interacción perpendicular entre la fuerza y la palanca.
T = brazo de palanca . Fuerza Normal
143
Fuerza Normal:
• Define a la componente de una fuerza, que incide perpendicular a la palanca y que representa a la fuerza rotatoria real.
Brazo de Palanca:
• Define a la distancia en línea recta desde el punto de giro hasta el punto de aplicación de una fuerza, por lo tanto, por cada una de las fuerzas aplicadas sobre una palanca, le corresponde un brazo de palanca.
144
Equilibrio Mecánico de las Palancas
• Una palanca esta en equilibrio rotatorio cuando la sumatoria de los momentos que generan las fuerzas que sobre ella actúan, se anulan, es decir tiene un valor igual a cero, lo que determina que la resultante de la suma de los torques positivos es igual a la suma de los torques negativos.
145
M = 0
Sumatoria M positivos = Sumatoria M negativos
M positivos + M negativos = 0
Sean:
M1 = F1 . b1 y M2 = F2 .b2 M = 0
M1 + M2 = 0
M1 = M2
F1 . b1 = F2 . b2
146
• Una palanca esta en desequilibrio rotatorio cuando la sumatoria de los momentos que generan las fuerzas que sobre ella actúan, no se anulan, es decir tiene un valor distinto de cero, lo que determina que la resultante de la suma de los torques positivos no es igual a la suma de los torques negativos.
147
M /= 0
Sumatoria M positivos /= Sumatoria M negativos
M positivos + M negativos / 0
Sean:
M1 = F1 . b1 y M2 = F2 .b2 M /= 0
M1 + M2 /= 0
M1 /= M2
F1 . b1 /= F2 . b2








![Musculoesqueletal[1] (pp tshare)](https://img.pdfslide.es/doc/110x75/55cfb2efbb61eb8e1b8b479e/musculoesqueletal1-pp-tshare.jpg)
![Musculoesqueletal[2] (pp tshare)](https://img.pdfslide.es/doc/110x75/55b352ffbb61eb9f568b45aa/musculoesqueletal2-pp-tshare.jpg)
![Hombrodolorosohemip[1] (pp tshare)](https://img.pdfslide.es/doc/110x75/55c7935dbb61eb6d688b45ff/hombrodolorosohemip1-pp-tshare.jpg)


![Cervical[1] (pp tshare)](https://img.pdfslide.es/doc/110x75/55c7c857bb61ebb4488b45d6/cervical1-pp-tshare.jpg)
![Ejerciciosyposturasrecomendables[1] (pp tshare)](https://img.pdfslide.es/doc/110x75/55ccf6c9bb61ebed528b46f1/ejerciciosyposturasrecomendables1-pp-tshare.jpg)




![Ortopedia2[1] (pp tshare)](https://img.pdfslide.es/doc/110x75/55c7a08ebb61eb9a418b45e2/ortopedia21-pp-tshare.jpg)



![Introduccion[1] (pp tshare)](https://img.pdfslide.es/doc/110x75/55d33239bb61ebdf5b8b475f/introduccion1-pp-tshare-55d487593ae2a.jpg)





