Embed Size (px)
Citation preview
Escu
ela
Polit
écni
ca S
uper
ior d
e Li
nare
s Gr
ado e
n ING
ENIE
RÍA
ELÉC
TRIC
A UNIVERSIDAD DE JAÉN
Escuela Politécnica Superior de Linares
Trabajo Fin de Grado
ESTUDIO DE LAS DISTINTAS
TÉCNICAS DE SUMINISTRO DE ENERGÍA ELÉCTRICA EN
VEHÍCULOS DE TRACCIÓN
Alumno: Sergio Justicia Tobaruela Tutor: Prof. D. Manuel Valverde Ibáñez Dpto.: Ingeniería Eléctrica
Junio, 2016
1
ÍNDICE 1 Historia de las locomotoras ............................................................................. 2 2 Evolución histórica del suministro de energía en los vehículos de tracción ..... 4
2.1.1 Tracción Diésel y fabricación de locomotoras diésel-eléctricas ........... 4 2.1.2 Tracción eléctrica y locomotoras eléctricas ......................................... 5 2.1.3 Locomotoras de levitación magnética ................................................. 6
2.2 Trenes de tracción ................................................................................... 6 2.2.1 Locomotoras eléctricas ....................................................................... 9 2.2.2 Unidades múltiples eléctricas .............................................................12 2.2.3 Locomotoras diésel ............................................................................14 2.2.4 Múltiples unidades diésel ...................................................................18 2.2.5 Locomotoras turbina de gas – eléctricas ............................................20 2.2.6 Locomotoras híbridas .........................................................................23 2.2.7 Trenes de levitación magnética ..........................................................26 2.2.8 Sistemas y dispositivos de frenos ......................................................28 2.2.9 Clasificación de las locomotoras de tracción eléctrica ........................31
2.3 Nuevas perspectivas del diseño de locomotoras .....................................34 3 Vehículos de tracción alimentados con PEMFC .............................................38
3.1 Pilas de combustible ...............................................................................39 3.1.1 Introducción a las pilas de combustible ..............................................39 3.1.2 Clasificación de las pilas de combustible ...........................................43 3.1.3 Estudio comparativo de los distintos tipos de pila de combustible ......47
3.2 Diseño y estructura del vehículo .............................................................52 3.2.1 Subsistemas ......................................................................................54
4 Modelado y simulación de un vehículo de tracción .........................................59 4.1 Pila de combustible y sistema de almacenamiento de energía híbrido de
pilas de combustible. ....................................................................................................60 4.1.1 Modelado de las pilas de combustible ................................................60 4.1.2 Sistemas de almacenamiento de energía híbridos para pilas de
combustible 63 4.1.3 Estrategia de control de un sistema de energía de células de
combustible híbrido ...................................................................................................66 5 Conclusiones .................................................................................................73 6 Referencias bibliográficas ..............................................................................74
2
1 HISTORIA DE LAS LOCOMOTORAS
La historia del desarrollo del transporte ferroviario está directamente relacionada con la llegada de las locomotoras y la mejora de sus diseños y su fabricación. El primer proceso de construcción de una locomotora se puede datar en 1801, con la construcción de automóvil de vapor, que fue diseñado por el inventor británico, Richard Trevithick. La posterior transformación de ese diseño fue realizada por él con la ayuda de John Steele en 1803-1804, cuando fue re-diseñado para el uso en las minas de hierro de Penydarren (Gales). Esta locomotora está considerada como la primera locomotora real en el mundo. Los registros históricos dicen que la locomotora transportó 10 toneladas de hierro, 70 pasajeros y 5 vagones desde la mina al Canal Merthyr-Cardiff. Sin embargo, esa locomotora no era tan buena como muchas otras locomotoras particulares, fabricadas por otros inventores.
El paso decisivo en el desarrollo de esta tecnología pertenece a otro inventor británico, George Stephenson, quien construyó una locomotora para un ferrocarril de minas en 1814. Esa locomotora, llamada “Blücher”, fue capaz de transportar una carga de 30 toneladas hasta una colina a 6.4 km/h. Fue la primera experiencia exitosa de la fabricación de una locomotora que utilizó fuerzas de fricción entre las ruedas y carriles suaves, usándose bridas para la realización del esfuerzo de tracción. Después de eso, George Stephenson estableció una empresa llamada Robert Stephenson. La compañía construyó varios tipos de locomotoras y la primera se llamó “Locomotion Nº 1”. Más tarde se convirtió un nombre familiar para todos los vehículos de tracción que funcionan sobre vías ferroviarias.
El ancho de vía seleccionada por George Stephenson fue de 4 pies 8 ½, que era el "ancho de vía estándar”, y se convirtió rápidamente en el más común en Europa Occidental y todavía es el estándar para la mayoría de los ferrocarriles de todo el mundo.
En la segunda mitad del siglo XIX, el diseño de la máquina de vapor no tuvo fundamentalmente cambios, aunque se buscaron formas básicas para su mejora en las siguientes líneas: más potencia, mayor tracción, mayor velocidad y también mejoras en la eficiencia energética y el rendimiento operativo. El trabajo de muchos ingenieros e inventores de diferentes países dio lugar a las locomotoras de vapor en el último trimestre del siglo XIX, siendo los vehículos más eficaces de tracción a un nivel apropiado para la ciencia y la tecnología en ese momento. El desarrollo de la industria y el comercio, hizo una gran contribución a la rápida construcción de ferrocarriles y el transporte por ferrocarril en el mundo. A finales del siglo XIX, toda la red ferroviaria del mundo, con locomotoras de vapor, era superior a 800.000 kilómetros.
A principios del siglo XX, comenzaban a aparecer los competidores de las
locomotoras de vapor. En las vías del ferrocarril de la minería y en las empresas metalúrgicas era posible encontrar tracción eléctrica; en los ferrocarriles comunes existían locomotoras con unidades de potencia de combustión interna, es decir, tracción diésel o locomoción diésel.
3
Estas circunstancias fueron el impulso para el posterior desarrollo de la máquina de vapor, pero las capacidades técnicas de la locomotora de vapor casi habían llegado a sus límites prácticos y no podían competir con la tracción eléctrica y diésel, de rápido crecimiento.
En ese momento, la economía mundial apostó por la fabricación de locomotoras.
Las locomotoras de vapor se construían en grandes plantas industriales. Entre los años 1930 y 1940, las fábricas producían máquinas de vapor de gran alcance, de hasta 3.500 CV, que preveía la carga de trabajo intensivo de los ferrocarriles durante la Segunda Guerra Mundial, así como en el período posterior a la guerra.
Sin embargo, el principal inconveniente de la locomotora de vapor era su reducida
eficiencia en lo que respecta a la conversión de energía, que no superaba el 15.6% durante el funcionamiento del tren, y esto no era compatible con el progreso de la ciencia y la tecnología en el medio del siglo XX.
Durante ese período, todos los países industrializados comenzaron la transición a
nuevas formas avanzadas de tracción, sustituyendo las locomotoras de vapor con trenes diésel y locomotoras eléctricas, así como reestructurando las empresas que se habían dado cuenta de las ventajas del diésel y la electricidad. Las empresas empezaron a cambiar las estructuras, tecnologías y la organización de sus procesos de línea de producción. En Estados Unidos, se hizo una producción en masa de locomotoras diésel a finales de la década de 1940. En Europa y en Asia, que tanto sufrieron durante la Segunda Guerra Mundial y sus secuelas, la introducción de diésel y tracción eléctrica se retrasó.
4
2 EVOLUCIÓN HISTÓRICA DEL SUMINISTRO DE ENERGÍA EN LOS VEHÍCULOS DE TRACCIÓN
2.1.1 Tracción Diésel y fabricación de locomotoras diésel-eléctricas
La creación de las primeras locomotoras de tracción diésel comenzó en la década
de 1920 con la producción de prototipos. Una locomotora diésel-eléctrica presentaba nuevos retos para la fabricación en comparación con una locomotora de vapor, ya que era una máquina mucho más compleja y técnicamente diversa. Sus componentes no eran sólo metal soldado (marcos, carrocería y chasis) como la tecnología de producción para la fabricación de diseños de la locomotora de vapor, sino que, también requería de potentes motores diésel, compresores, ventiladores, intercambiadores de calor, máquinas eléctricas y aparatos y dispositivos más complejos. Por lo tanto, al contrario que con la locomotora de vapor, donde casi podría ocurrir todo el ciclo de producción en una sola planta, para fabricar una locomotora diésel era y es necesario una amplia cooperación de muchas industrias, especialmente la maquinaria pesada, motor diésel y las industrias de maquinaria eléctrica. El gran volumen de producción requería el diseño de procesos tecnológicos diferentes (montaje, instalación, etc.) junto con las pruebas de laboratorio y de campo. El comienzo de la era industrial de la locomotora diésel-eléctrica fue iniciada por las grandes empresas de Estados Unidos, Canadá y la ex URSS, en pequeños números en la década de 1930, pasando a producción en masa entre los años 1950 y 1960. Las empresas facilitaron la transición masiva de estos países de locomotoras de tracción a principalmente diésel. Los principales fabricantes de locomotoras diésel en ese momento eran "General Motors", "General Electric", "COAP" y "Bombardier". El volumen máximo de producción de locomotoras diésel en Estados Unidos se produjo en los años 1950 y 1960, llegando casi a 4.000 unidades al año. En la antigua URSS la producción de locomotoras se concentró, principalmente, en las grandes plantas de ingeniería ubicada en Lugansk, Kolomna y Bryansk, y en esos mismos años, la producción máxima alcanzada 3,000 unidades por año. En los países de Europa occidental, a diferencia de América del Norte y la antigua URSS, la atención se centró en la electrificación de los ferrocarriles, y la producción de locomotoras diésel fue significativamente menor, con el énfasis puesto en la exportación, así como en el uso local de las locomotoras industriales y de maniobras con cargas por eje de luz. La principal concentración de tracción diésel ha sido y es todavía en los ferrocarriles en los países industrializados como Estados Unidos, Canadá, Australia, Rusia y China, con más de 40.000 locomotoras. En la actualidad, el mundo cuenta con más de 1 millón de kilómetros de longitud de vías de ferrocarril con tracción diésel. Estos se encuentran principalmente en los Estados Unidos, Canadá, Rusia, India, China, Brasil, Australia y Sudáfrica.
Actualmente, los fabricantes de locomotoras diésel-eléctricas están haciendo
importantes esfuerzos para mejorar sus productos con la introducción de los últimos avances de la ciencia y la tecnología en este campo. Las áreas principales siguen siendo los siguientes: aumentar la capacidad de energía por unidad, mejorar la tracción y el rendimiento operativo (máxima realización de la adhesión, mejorar la eficiencia y el desempeño ambiental, maximizar la seguridad operacional y mejorar la ergonomía para el personal a bordo).
5
2.1.2 Tracción eléctrica y locomotoras eléctricas El desarrollo del tren de tracción eléctrica avanzaba en paralelo con la evolución
de los sistemas eléctricos y la creación de máquinas eléctricas y dispositivos hacia el final del siglo XIX, que eran capaces de implementar los parámetros técnicos y las características necesarias para el funcionamiento de los ferrocarriles. Los primeros prototipos prácticos de trenes eléctricos, se crearon en la década de 1920. La producción industrial de locomotoras eléctricas se inició en la década de 1930 y hubo una mejora progresiva de la capacidad de potencia de tracción continua y la velocidad de las locomotoras hasta la Segunda Guerra Mundial. Durante la guerra, la producción de locomotoras eléctricas se suspendió por completo. Después de la guerra, los operadores ferroviarios en Europa renovaron su demanda de locomotoras eléctricas; esto estaba relacionado con la reparación y ampliación de las áreas de tracción eléctrica. La tracción eléctrica se convirtió en la forma principal de propulsión en Europa, debido principalmente a una mejor eficiencia de la energía y mayor potencia de tracción, menores costes de mantenimiento de la locomotora, un control más sensible y una reducción en el impacto sobre el medio ambiente.
Las locomotoras eléctricas modernas pueden funcionar con diferentes tipos de tensiones y corrientes, y esto se llama rendimiento multi-sistema (que permite un funcionamiento en corriente continua y alterna y en diferentes voltajes). Se utilizan generalmente sistemas de cableado desde arriba, a excepción de los ferrocarriles subterráneos. La capacidad de carga de las locomotoras eléctricas es de hasta 10.000 kW por unidad. En el tráfico de pasajeros, es posible ver locomotoras de pasajeros de alta velocidad, actualmente están operando a velocidades de hasta 350 km/h. Los países con tracción diésel tradicional, como Estados Unidos, Canadá, China, Rusia y otros países también han comenzado la introducción y establecimiento de tráfico de pasajeros de alta velocidad con tracción eléctrica.
Ser los líderes en el desarrollo y la producción de locomotoras eléctricas, trenes
eléctricos, transporte urbano eléctrico, trenes eléctricos de alta velocidad y equipos de energía, eran y son las preocupaciones arraigadas en: "Siemens" y "Alstom", así como en grandes empresas como: “AnsaldoBreda”, "Asea Brown Boveri (ABB)”, "Bombardier", "Krauss-Maffei”, “Mitsubishi”, “Kawasaki Heavy Industries”, “Hitachi” y otras. Mejoras en el diseño y los componentes modulares y piezas para los trenes eléctricos, han requerido la creación de nuevas tecnologías en los campos de la ingeniería eléctrica, la aerodinámica, crear materiales súper ligeros y duraderos, sistemas de control y funcionamiento de la seguridad en la pista. Tomando en cuenta las muchas empresas están llevando a cabo la fabricación paralela de vehículos ferroviarios con tracción eléctrica y diésel. La dirección más prometedora es crear una serie de locomotoras en base a un principio modular, donde una locomotora diésel o eléctrica sean construidas sobre la base de un vehículo estandarizado, con tantos componentes comunes como sea posible, en combinación con la mayor cantidad de "módulos" específicos individualmente, según sea necesario para el funcionamiento en la vía prevista. Esta tendencia se puede observar en los últimos avances de diseño de empresas como: Siemens, Alstom, Bombardier y otros.
6
2.1.3 Locomotoras de levitación magnética Debido al aumento significativo de la capacidad de potencia de tracción y la
velocidad de los trenes, algunos problemas surgen con el coeficiente de adherencia necesaria entre la rueda y el carril, se hace difícil cumplir con los requisitos de seguridad de la estabilidad, la aceleración y el frenado. Además, los efectos dinámicos que los trenes de muy alta velocidad imponen a los componentes de la vía, aumentan en gran medida el deterioro de equipos y costos de mantenimiento. Como consecuencia, hay una nueva dirección para la propulsión de vehículos ferroviarios, que implementa la tecnología de levitación magnética básica para diseñar soluciones para un tipo de vehículo ferroviario que no se basa en la fricción de adherencia. Fue desarrollado por Transrapid en Alemania durante la década de 1970s-1980s. El funcionamiento del tren de levitación magnética se basa en la sustitución del contacto rueda-carril convencional por bloques magnéticos en los vehículos y, o bien, placas ferromagnéticas o bobinas eléctricas en la estructura que crea campos magnéticos que proporcionan tanto la elevación y el empuje.
La primera línea de levitación magnética, con una longitud de 30,5 km de vía
doble y una velocidad máxima de 430 km/h, fue abierta para las operaciones comerciales en el año 2004 por el gobierno chino entre el aeropuerto de Pudong y la estación de metro de Shanghai. Se creó con la participación de ThyssenKrupp y una empresa subsidiaria de Siemens.
2.2 Trenes de tracción
Los trenes ferroviarios se pueden dividir en dos grandes grupos: locomotoras (que
proporcionan la fuerza motriz para un tren) y los coches o vagones (que son arrastrados por las locomotoras).
La potencia en los trenes se puede suministrar a las ruedas o usar levitación
magnética. La fuerza de tracción para trenes con ruedas, aparece como resultado de la realización de los esfuerzos de tracción por un vehículo motorizado (vehículo de tracción ferroviaria) como resultado del proceso de fricción entre las ruedas y los carriles.
Para trenes que utilizan principios de levitación magnética, la fuerza de tracción se
crea por la fuerza de propulsión magnética proporcionada por un motor de inducción lineal.
La potencia para trenes de ruedas, puede clasificarse utilizando dos enfoques:
• Por fuentes de energía: Esta divide el tren en dos grupos de no-autónomo y autónomo. Los trenes no autónomos, están generalmente provistos de una fuente de energía
que está fuera de la locomotora. Las locomotoras eléctricas son un buen ejemplo de trenes no autónomos.
7
Los trenes autónomos, reciben la energía necesaria para moverse, de una planta de energía que está directamente en el interior del vehículo. Las locomotoras de vapor, diésel y turbinas de gas, así como vehículos de transporte y trenes híbridos diésel son trenes autónomos.
Las ventajas de la tracción no autónoma son: mayor potencia por vehículo, la
reducción significativa de los efectos sobre el medio ambiente durante el funcionamiento, y también la posibilidad del uso más eficiente de la energía (por ejemplo, frenado regenerativo en eléctrica locomotoras).
Sin embargo, los trenes autónomos también tienen sus ventajas, menores costes
de construcción y mantenimiento de infraestructuras de transporte (ausencia de una red de subestaciones de suministro eléctrico, etc.), y también proporcionan una posibilidad para trabajar en condiciones críticas y situaciones extraordinarias (fracaso de las subestaciones de suministro eléctrico, pérdida de conexión en redes del cable conductor de contacto en caso de malas condiciones meteorológicas, cuando hay formación de hielo o huracanes, etc.)
Actualmente, algunos trabajan en el diseño del desarrollo de trenes con fuentes
de energía combinadas, que deberían permitir a un vehículo, funcionar en ambos modos: autónomo y no-autónomo.
• Por tipos de uso: Esta permite la división en el transporte de mercancías o de
pasajeros y los vehículos ferroviarios especiales.
El transporte de pasajeros consta de dos grupos, siendo éstos: locomotoras y coches. En el transporte de mercancías, las locomotoras se diseñan para realizar un gran esfuerzo de tracción, para transportar grandes cargas y trenes pesados de acero. Además de las unidades individuales, estas locomotoras se utilizan en los grupos de control (paralelo) y se utilizan en diferentes lugares del tren (control distribuido). Estas locomotoras no suelen tener ninguna capacidad de carga útil a bordo.
Las locomotoras de maniobras (motores de conmutación) realizan trabajos en las
estaciones relacionadas con la formación de los trenes que se ensamblan para el envío o desarmar a su llegada. Por lo general, no poseen las grandes capacidades de potencia de las principales locomotoras de línea y son capaces de trabajar en la pista con menos carga de eje.
Los vehículos de tracción ferroviaria para fines especiales pueden ser clasificados
como vehículos que son capaces de realizar funciones de usuario especial, aparte de transporte de carga y pasajeros. Por ejemplo, existen los vehículos tales como el mantenimiento de los vehículos, el uso militar de vehículos ferroviarios o de extinción de incendios y vehículos de rescate.
Un vehículo ferroviario impulsado por sí mismo es una construcción de ingeniería
muy compleja, que incorpora muchos logros e innovaciones de la ciencia y la tecnología moderna. Desarrollo, pruebas e investigación de este tipo de máquinas complejas no son
8
posibles sin el conocimiento y habilidades de diseño, y una comprensión de la modelización y cálculo de componentes estructurales y partes aplicables en este campo.
A diferencia de otros tipos de vehículos de transporte, el ferrocarril debe satisfacer
un gran número de requisitos específicos para su funcionamiento. Además, los requisitos adicionales para diferentes ferrocarriles pueden variar sustancialmente entre sí.
Se pueden definir las siguientes limitaciones básicas, que tienen una influencia
significativa en el diseño de ferrocarriles:
• Ancho de vía: Muchas dimensiones diferentes para el ancho de vía han encontrado una gran aplicación, por ejemplo, las dimensiones para indicadores comúnmente utilizados pueden variar de 1000 a 1676 mm.
• Carga de calibre: dimensiones predefinidas (altura y anchura) para vehículos ferroviarios, lo que debería permitir que los vehículos se mantuviesen dentro de una “envolvente” específica que proporciona el espacio adecuado a la estructura de contornos que rodean (por ejemplo, túneles, puentes y plataformas) con el fin de asegurar el funcionamiento seguro de los vehículos a través de ellos. El indicador de carga de vehículos ferroviarios suele ser diferente en cada país y los ferrocarriles, lo que significa que puede diferir considerablemente de un ferrocarril a otro.
• Carga por eje: los límites de cargas en un riel están determinadas por la estructura de la vía, incluyendo qué tipo de rieles están en uso, los tipos y el espaciamiento de traviesas de ferrocarril, la capacidad portante de la cimentación de la vía (balasto, sub-balasto y la formación subyacente), y también por puntos fuertes de puentes y otras estructuras de soporte de ingeniería.
• Tipos de dispositivos de acoplamiento y de absorción (también llamado proyecto de engranajes): Los acopladores se utilizan para la conexión de los vehículos de transporte ferroviario en un tren, para la transmisión de tracción y frenado los esfuerzos de los vehículos de transporte motorizados a los sin motor (por ejemplo, locomotoras y vagones) para la absorción de las cargas de choque que se producen durante el movimiento, paradas y también durante las maniobras.
Los primeros dispositivos de acoplamiento eran ganchos y acoplamientos de tornillo, que todavía están en uso para la conexión de algunos ferrocarriles. Tales conexiones deben hacerse manualmente, y el proceso es muy lento y arriesgado también desde el punto de vista de la seguridad. Esta es una razón por la que, a principios del siglo XX, tales dispositivos comenzaron a ser reemplazados por dispositivos de acoplamiento automáticos. Existen numerosos diseños de acoplamientos automáticos que están en uso en diferentes vías férreas y en diferentes países. Los siguientes tipos básicos de dispositivos de absorción se utilizan en acoplamientos automáticos:
• Por resorte-fricción • Hidráulico • Elementos de goma • Elementos elastoméricos
9
Los enganches automáticos en uso en la carga de mercancías, suelen estar equipados con un diseño de resorte-fricción. En el transporte de pasajeros, que suelen estar equipados con un diseño similar, incorporan elementos de goma. Otros tipos de dispositivos de acoplamiento, como los elastómeros, se utilizan en operaciones de trenes de alta velocidad.
Además, algunos vehículos con ganchos y acoplamientos de tornillo también
tienen amortiguadores que están instalados cerca de los bordes laterales (esquinas) en la parte delantera y trasera de los vehículos ferroviarios. Este diseño limita la holgura en los trenes y reduce las cargas de choque.
• Sistemas de señalización y seguridad: en los ferrocarriles de los diferentes países,
se utilizan diferentes estándares para garantizar la seguridad de las operaciones. Los ferrocarriles, a menudo tienen problemas en cuanto a la seguridad operacional en el caso de una necesidad para circular en vías de diferentes países. En particular, la Unión Europea desarrolla documentos normativos especiales para la estandarización de los diferentes sistemas de señalización y seguridad.
• Sistemas de freno: en los ferrocarriles, se utilizan diversos sistemas de freno que han encontrado una amplia aplicación, y estos sistemas se pueden clasificar de la siguiente manera:
o Neumático. o Eléctrico. o Hidráulico. o Mecánico.
Todos estos sistemas pueden tener varios diseños y arreglos estructurales. Las principales características de diseño distintivas para vehículos ferroviarios con
motor y sus componentes se describen a continuación. 2.2.1 Locomotoras eléctricas
Una locomotora eléctrica es una locomotora no autónoma, que recibe energía eléctrica para su movimiento desde una fuente de alimentación eléctrica externa.
El esquema general del sistema de suministro de energía eléctrica utilizado en los
ferrocarriles electrificados se muestra en la Figura 2.1.
Figura 2.1 Esquema general para el sistema de suministro de energía eléctrica utilizada
en los ferrocarriles electrificados
10
La energía eléctrica de la central eléctrica se transmite a la locomotora mediante líneas de transporte de alta tensión y subestaciones eléctricas. Las subestaciones realizan la transformación de la corriente en conformidad con los parámetros requeridos y luego suministrarla a través de líneas de alta tensión de alimentación a los puntos a lo largo de la catenaria para la alimentación de las locomotoras eléctricas a través del hilo conductor de contacto. Para las redes de bucle cerrado, la vía del tren está equipada con alimentadores de retorno especiales que están conectados a las subestaciones de energía.
Las locomotoras eléctricas se pueden dividir en tres tipos:
• Locomotoras eléctricas de corriente continua (DC). • Locomotoras eléctricas de corriente alterna (AC). • Locomotoras eléctricas Multi-sistema.
Las locomotoras eléctricas se pueden diseñar para funcionar en DC o AC, u
funcionar selectivamente en ambos. Además, la tensión DC y AC, así como las frecuencias de alimentación pueden ser diferentes.
Las locomotoras eléctricas DC son diferentes de las de AC debido a que no tienen alta tensión, por lo tanto no tienen un transformador reductor para la alimentación de los motores de tracción de DC.
Las locomotoras eléctricas Multi-sistema tienen el equipo de recolección, la tracción y la potencia de corriente requerida para trabajar con varias combinaciones diferentes de corriente y tensión.
Una locomotora eléctrica se compone de los siguientes sistemas básicos: eléctrico, mecánico, neumático e hidráulico.
La carrocería, el bastidor principal, los dispositivos de acoplamiento, la suspensión, los dispositivos para la transmisión de tracción y freno, los bogies, un sistema de refrigeración de aire y la ventilación de los equipos de tracción eléctrica pertenecen al sistema mecánico de la locomotora eléctrica.
El sistema neumático incluye un compresor de aire que suministra aire comprimido a través de la conexión de tuberías en el sistema de freno, así como un sistema de control automático, depósitos para el almacenamiento del aire comprimido y control y los sistemas de gestión y de instrumentación (válvulas, manómetros, etc.)
Los transformadores de potencia, los inversores, los motores eléctricos de tracción, las máquinas auxiliares, el sistema de control eléctrico, las unidades de gestión y los sistemas de frenado dinámico y regenerativos son todas las partes del equipo eléctrico de locomotoras eléctricas.
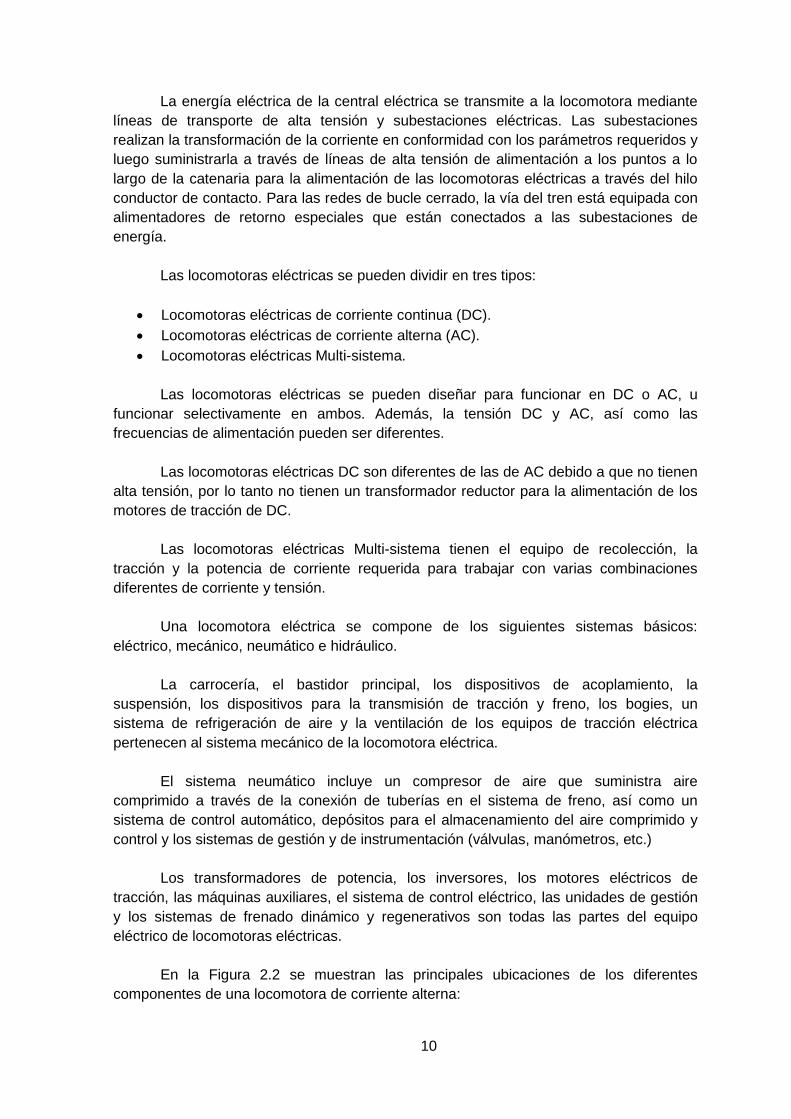
En la Figura 2.2 se muestran las principales ubicaciones de los diferentes componentes de una locomotora de corriente alterna:
11
Figura 2.2.1- Cabina del conductor; 2- gabinete con el equipo eléctrico y el
sistema de control por microprocesador; 3- pantógrafo; 4- Sistema de ventilador de refrigeración de delante del bogie; 5- inversor; 6- Equipo de entrada de alto voltaje; 7- armario con equipos eléctricos; 8- Depósito del sistema principal de refrigeración del
aceite del transformador; 9-set de resistencias de frenado; 10- Rectificador de propulsión; 11- frenos del sistema neumático principal de reserva; 12- frenos sistema neumático del depósito auxiliar; 13- Compresor de aire; 14- acoplador; 15- cabezal; 16- Receptor de
bobina del sistema de señalización; 17- Trampa de arena de; 18- Freno de estacionamiento; 19- Bogie frontal; 20- Bloque condensador; 21- Unidad de
transformador principal; 22- baterías; 23- reactores de suavizado; 24- motor de tracción; 25- Bogie trasero; 26- pivote; 27- ruedas.
El sistema hidráulico incluye los sistemas de refrigeración de líquidos (aceite,
agua, etc.) de las locomotoras eléctricas, así como un sistema de control hidráulico y la instrumentación.
En las locomotoras eléctricas, los siguientes tipos de motores de tracción pueden ser utilizados:
• Motores eléctricos Brushed DC. • Motores AC. • Motores eléctricos Brushless DC
Los motores de tracción se utilizan en los diseños actuales para los frenos
dinámicos y regenerativos con el propósito de reducir el desgaste de las partes de contacto de los sistemas de frenos mecánicos e hidráulicos, y también para la economía de consumo de energía eléctrica.
12
Durante el frenado dinámico, la energía eléctrica se disipa en forma de calor; pero, en el caso de frenado regenerativo, esta energía se devuelve a la red de energía eléctrica, o en el almacenamiento a bordo en el caso de las locomotoras híbridas.
Los motores eléctricos DC Brushless y los motores eléctricos AC son los más prometedores, ya que producen una potencia de tracción grande y tienen menores dimensiones y peso en comparación con los motores eléctricos Brushed DC, así como la reducción de costes para los procesos de funcionamiento, mantenimiento y reparación. 2.2.2 Unidades múltiples eléctricas
Una unidad múltiple eléctrica (EMU) es un tren utilizado para el transporte de pasajeros en la ciudad, las redes ferroviarias de cercanías y regionales, y también para los trenes de pasajeros de alta velocidad.
Una EMU entra en la categoría de no-autónomo de material rodante que recibe energía de una fuente de alimentación eléctrica externa. Al igual que en las locomotoras eléctricas, el equipo de tracción EMU se puede dividir en tres tipos: corriente continua, corriente alterna y multisistémicas.
Los diseños principales de los equipos y otros sistemas utilizados en las EMUs son similares a las de las locomotoras eléctricas. La diferencia es que una EMU es un tren de potencia, que consiste en la conducción, el motor y/o coches de remolque en un esquema de diseño clásico. El coche de conducción también puede ser un coche de motor. En algunos casos, un coche de potencia (término similar a una locomotora eléctrica) también se puede añadir a la configuración de un tren, tal como una unidad separada. Por lo general, no se utilizan vagones de remolque para equipos de tracción; en casos raros, pantógrafos y freno compresores de aire se pueden instalar en ellos. Las EMU de los trenes pueden tener un diseño modular. Una configuración del tren EMU generalmente abarca desde 2 hasta 16 coches.
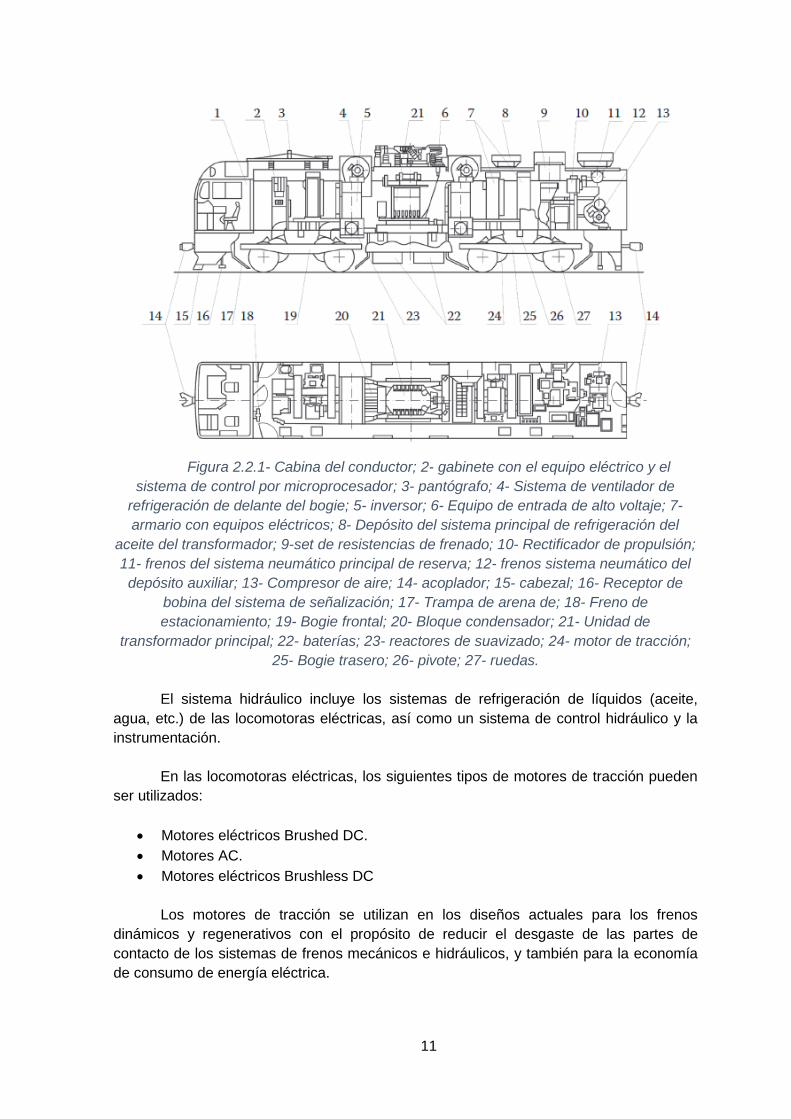
Figura 2.3 M- Bogie motorizado; T- Bogie remolque.
En la Figura 2.3 se muestran ejemplos de diferentes configuraciones de trenes
con un diseño modular. Las locomotoras tienen una cabina de conducción desde la que se controla un tren. En estos coches se pueden instalar algunos equipos adicionales, espacio de almacenamiento y alojamiento de los pasajeros, y se colocan habitualmente tanto al principio como al final de la configuración del tren para permitir un viaje de vuelta
13
sin tener que girar el tren. Los coches están equipados con bogies motorizados o remolque y también con equipos de tracción y los pantógrafos.
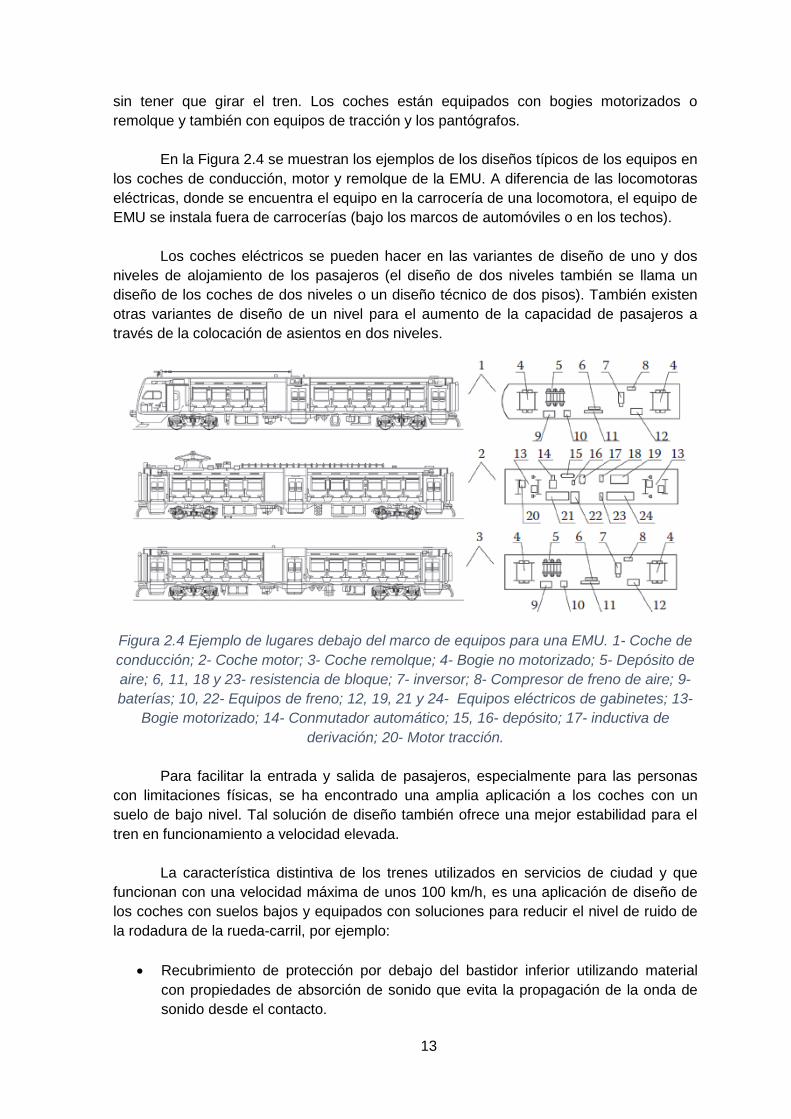
En la Figura 2.4 se muestran los ejemplos de los diseños típicos de los equipos en los coches de conducción, motor y remolque de la EMU. A diferencia de las locomotoras eléctricas, donde se encuentra el equipo en la carrocería de una locomotora, el equipo de EMU se instala fuera de carrocerías (bajo los marcos de automóviles o en los techos).
Los coches eléctricos se pueden hacer en las variantes de diseño de uno y dos
niveles de alojamiento de los pasajeros (el diseño de dos niveles también se llama un diseño de los coches de dos niveles o un diseño técnico de dos pisos). También existen otras variantes de diseño de un nivel para el aumento de la capacidad de pasajeros a través de la colocación de asientos en dos niveles.
Figura 2.4 Ejemplo de lugares debajo del marco de equipos para una EMU. 1- Coche de conducción; 2- Coche motor; 3- Coche remolque; 4- Bogie no motorizado; 5- Depósito de aire; 6, 11, 18 y 23- resistencia de bloque; 7- inversor; 8- Compresor de freno de aire; 9- baterías; 10, 22- Equipos de freno; 12, 19, 21 y 24- Equipos eléctricos de gabinetes; 13-
Bogie motorizado; 14- Conmutador automático; 15, 16- depósito; 17- inductiva de derivación; 20- Motor tracción.
Para facilitar la entrada y salida de pasajeros, especialmente para las personas
con limitaciones físicas, se ha encontrado una amplia aplicación a los coches con un suelo de bajo nivel. Tal solución de diseño también ofrece una mejor estabilidad para el tren en funcionamiento a velocidad elevada.
La característica distintiva de los trenes utilizados en servicios de ciudad y que funcionan con una velocidad máxima de unos 100 km/h, es una aplicación de diseño de los coches con suelos bajos y equipados con soluciones para reducir el nivel de ruido de la rodadura de la rueda-carril, por ejemplo:
• Recubrimiento de protección por debajo del bastidor inferior utilizando material con propiedades de absorción de sonido que evita la propagación de la onda de sonido desde el contacto.
14
• El uso de ruedas elásticas y juegos de ruedas con propiedades de absorción de sonido.
Además, han comenzado a utilizarse ruedas accionadas individualmente en los trenes de ciudad en lugar de trenes con juegos de ruedas convencionales.
Los trenes de cercanías normalmente funcionan a velocidades inferiores a 180 km/h. Deben proporcionar una buena dinámica del tren bajo altas tasas de aceleración y de frenado que se asocian con las cortas distancias entre las estaciones. Es por eso que se han incrementado el número de ruedas o juegos de ruedas impulsadas en sus configuraciones de trenes. Además, no sólo están equipados con frenos neumáticos y eléctricos estándar, sino que también pueden estar equipados con frenos de vía y frenos de corrientes parásitas.
En el funcionamiento de los trenes interregionales, las velocidades pueden alcanzar los 400 km/h. El funcionamiento a una velocidad tal requiere un aumento significativo en la potencia (por ejemplo, trenes TGV desarrollan 12,500 kW), así como la aplicación de nuevas soluciones de diseño para asegurar la fiabilidad y la seguridad. Estos tipos de trenes se utilizan ampliamente con sistemas de suspensión activa para garantizar la inclinación en curvas, mejor transferencia de carga entre los elementos de rodadura, la nivelación del suelo, así como la instalación de bogies de dirección y la aplicación de sistemas de control de tracción para ruedas motrices individuales. Para mejorar el comportamiento dinámico de estos trenes, es necesario reducir el peso no suspendido del mecanismo de rodadura. Para este propósito, estos vehículos están equipados con ruedas sólidas con pequeños diámetros de hasta 600 mm y los motores de tracción con cajas de cambios colgada en la carrocería del coche. La transferencia de par de torsión a los juegos de ruedas se lleva a cabo por medio de ejes de accionamiento. Las carrocerías de los coches se fabrican con un alto uso de aleación ligera o de material compuesto con propiedades resistentes al fuego.
Se presta especial atención al diseño aerodinámico de trenes de alta velocidad. Esto se debe a la presencia de importantes fuerzas de arrastre, así como un aumento significativo en el ruido aerodinámico y las vibraciones que aparecen a velocidades superiores a 200 km/h, superando el nivel de ruido de las ruedas, tren de rodaje y equipos de tracción.
Los EMU son uno de los principales medios de transporte de pasajeros para competir con éxito en las distancias cortas y medias contra la carretera y el transporte aéreo. 2.2.3 Locomotoras diésel.
Las locomotoras diésel son los vehículos ferroviarios autónomos más utilizados. La planta de energía utiliza un motor de combustión interna; por lo general, se emplea combustible diésel. Los motores que funcionan con gasolina no son comunes en los ferrocarriles debido a los altos costes de mantenimiento.
15
De acuerdo con sus operaciones de servicio, se pueden dividir en los siguientes grupos:
• Locomotoras de carga (en algunos casos, para los trenes con gran masa total y cargas de ejes pesados, pueden ser designados como locomotoras de arrastre pesado);
• Locomotoras de pasajeros; • Locomotoras de largo recorrido o mercancías-pasajeros; • Locomotoras de maniobras (también llamados selectores).
Las locomotoras diésel suelen estar formadas por la planta de energía y los cuatro
sistemas básicos: mecánico, eléctrico, neumático e hidráulico. Los diseños del marco principal (plataforma) o del cuerpo del coche monocasco se utilizan para la transmisión de los esfuerzos de tracción y de frenado generados por una locomotora a otros vehículos ferroviarios en la configuración del tren por medio de dispositivos de acoplamiento instalados en ellos.
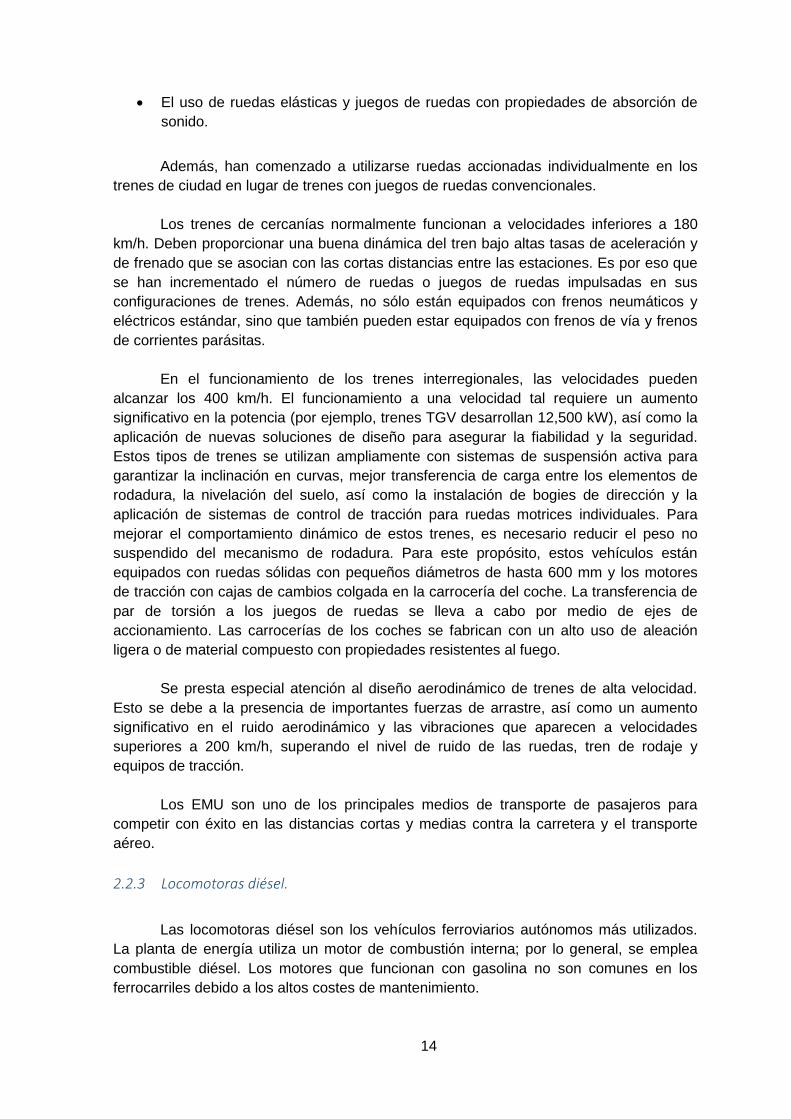
La carrocería del coche con transmisión eléctrico–diésel se divide en las siguientes áreas: operario, auxiliar, alternador, motor y módulos de radiadores. Como el bastidor y los módulos se colocan sobre los bogies, que tienen algo de espacio entre ellos bajo el centro del bastidor principal, los tanques de combustible y baterías están instaladas comúnmente en ese espacio. En la Figura 2.5 se muestra un ejemplo de un esquema de diseño de este tipo.
Figura 2.5 Ejemplo de las principales ubicaciones de los componentes de una locomotora diésel-eléctrica. 1- Cuerpo del coche; 2- Cabina del conductor; 3- Compartimento auxiliar; 4-Compartimento alternador; 5- Compartimiento del motor diésel; 6- Compartimento del
radiador; 7 y 8- bogies; 9- Bastidor principal; 10- acoplador; 11- Tanques de aire; 12- Tanque combustible; 13- baterías; 14- cabezal.
16
El principio de funcionamiento de la locomotora es la de convertir la energía de los gases producidos por procesos de combustión en los cilindros del motor en una fuerza de presión sobre los pistones que se convierte entonces en energía de rotación del cigüeñal. Esta energía se transfiere al sistema de transmisión (eléctrico, hidráulico o mecánico) y después de eso se transforma en la energía para los motores de tracción, que proporcionan la tracción a través de una caja de cambios o directamente a las ruedas o juegos de ruedas. Se necesita la tracción, que se realiza como una fuerza de tracción, para el movimiento de la locomotora y los vagones acoplados a la misma.
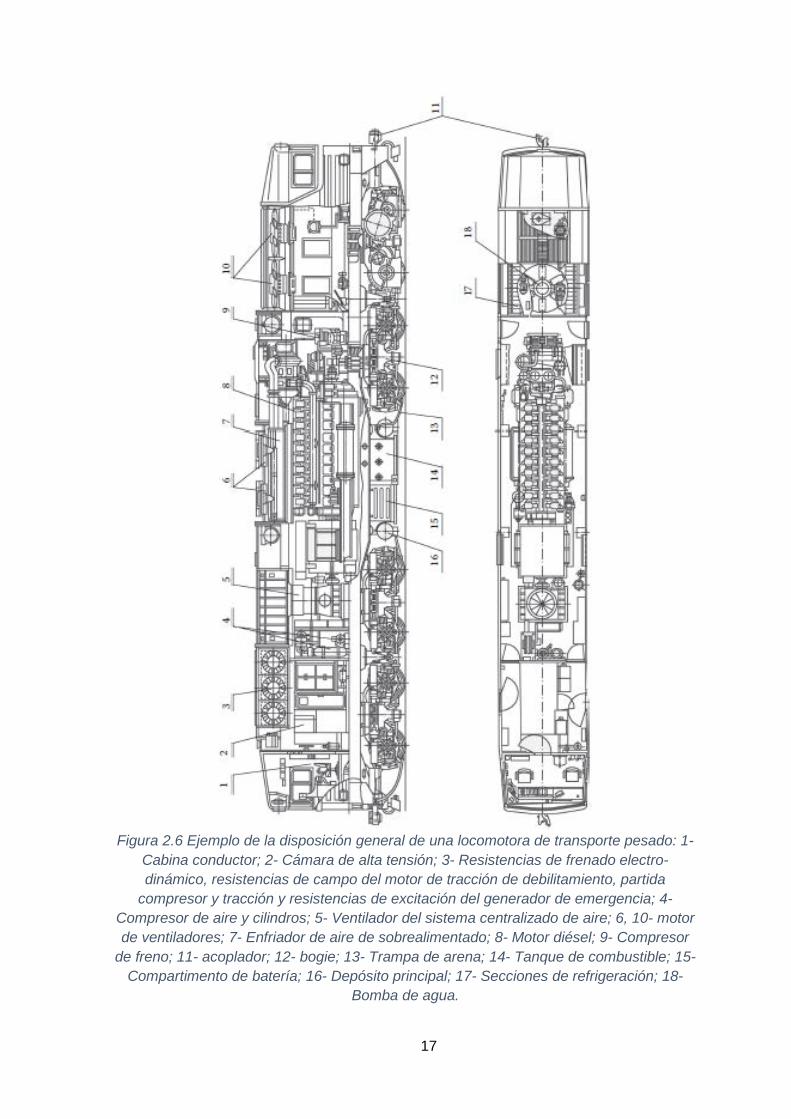
Las locomotoras se pueden hacer como una o dos versiones de la cabina, y también pueden funcionar como un sistema de unidades múltiples (dos o más locomotoras). Un ejemplo de una locomotora con dos cabinas se muestra en la Figura 2.6.
La clasificación de las locomotoras se puede basar en las características y parámetros asociados con sus componentes básicos o en equipos instalados en la locomotora.
La planta de energía utilizada en la locomotora se puede caracterizar mediante las siguientes funciones: por el número de plantas de energía (uno, dos, etc.); por el método de la posición del cilindro (en línea, de dos hileras en forma de V, horizontal, vertical, etc.); por el tipo de ciclo de funcionamiento (de dos tiempos, de cuatro tiempos); por la presencia de las unidades turbo-cargador para el sistema de alimentación del motor, el tipo y número de etapas para sistemas de refrigeración de aire; sistemas de control de velocidad y el rendimiento de los motores diésel (electrónico, mecánico, hidráulico y compuestos).
La capacidad de energía, el consumo de combustible, y la temperatura del refrigerante y el aceite pueden variar en un amplio intervalo dependiendo del tipo de las condiciones de la locomotora y operacionales.
La refrigeración del motor diésel se lleva a cabo muy a menudo por medio de
agua o un líquido especial que, después de haber sido calentado por el sistema de refrigeración del motor, ésta a su vez se enfría pasando a través de radiadores que se enfrían por los ventiladores. El gasoil en las versiones anteriores de las locomotoras se enfriaba de manera similar, pero el aceite refrigerado por aire es mucho menos eficaz y es costoso en términos del uso de metales no ferrosos. Esta es la razón por lo que las locomotoras recientes y nuevas tienen intercambiadores más compactos de calor aceite-agua en la que el aceite se enfría con agua en las secciones de enfriamiento. Además, el aire de carga necesario para el motor diésel también se enfría por el sistema de refrigeración del motor diésel. Por lo tanto, la mayoría de las locomotoras modernas tienen dos o más sistemas de circuito de refrigeración en su diseño. Por ejemplo, el sistema de enfriamiento de doble circuito de un motor diésel tiene el circuito primario, donde el agua o líquido refrigerante enfría las piezas del motor diésel, y el segundo circuito para la refrigeración del aire de sobrealimentación y el aceite caliente. Una refrigeración avanzada y mejor en el segundo circuito puede aumentar la fiabilidad y la eficiencia de la locomotora diésel.
17
Figura 2.6 Ejemplo de la disposición general de una locomotora de transporte pesado: 1-
Cabina conductor; 2- Cámara de alta tensión; 3- Resistencias de frenado electro-dinámico, resistencias de campo del motor de tracción de debilitamiento, partida
compresor y tracción y resistencias de excitación del generador de emergencia; 4- Compresor de aire y cilindros; 5- Ventilador del sistema centralizado de aire; 6, 10- motor de ventiladores; 7- Enfriador de aire de sobrealimentado; 8- Motor diésel; 9- Compresor
de freno; 11- acoplador; 12- bogie; 13- Trampa de arena; 14- Tanque de combustible; 15- Compartimento de batería; 16- Depósito principal; 17- Secciones de refrigeración; 18-
Bomba de agua.
18
El sistema de transmisión de una locomotora diésel utilizado más ampliamente es la transmisión de energía eléctrica que se caracteriza por los tipos de corrientes utilizadas por el alternador principal y los motores de tracción. Ellas son:
• DC, donde los motores y generadores de tracción son ambos DC. • AC–DC, donde el generador es de AC y los motores de tracción son DC. • AC donde los generadores y los motores de tracción son ambos AC.
Los motores de tracción y los generadores pueden ser síncronos y asíncronos en
los diseños Brushed. El sistema de control de tracción puede ser analógico, analógico-digital o digital.
Los motores de tracción de la locomotora pueden transferir un par de tracción a una sola rueda o juego de ruedas, en cuyo caso se denomina unidad individual. Si un motor se utiliza para más de un juego de ruedas, entonces se llama unidad de grupo.
El sistema de transmisión eléctrico proporciona tracción óptima y características económicas de las locomotoras.
Las transmisiones mecánicas se utilizan para locomotoras con una baja potencia. De tal modo, la transmisión es similar a un automotor, pero tiene algunas características distintivas para el modo de funcionamiento reversible.
Los sistemas hidráulicos de transmisión constan de una caja de engranajes hidráulicos conectados al cigüeñal del motor diésel y a la transmisión mecánica para los juegos de ruedas. El ajuste del par de tracción se lleva a cabo por medio de la variación de la tasa de flujo y la presión del líquido de trabajo (aceite). En comparación con la transmisión eléctrica, la transmisión hidráulica no necesita los metales no ferrosos que se adoptaron ampliamente en el período de deficiencia de cobre eléctrico durante los años 1950 y 1960. Sin embargo, la transmisión hidráulica es una máquina de precisión que requiere habilidades de alto nivel y experiencia técnica del personal de servicio, y también necesita de alta calidad y aceites caros. Una desventaja más de la transmisión hidráulica es su reducida eficiencia en comparación con la transmisión eléctrica.
El equipo auxiliar de la locomotora incluye los sistemas de refrigeración, suministro de aire y suministro de combustible del motor diésel, el sistema de lijado, el sistema de protección contra incendios, los equipos auxiliares eléctricos y circuitos de baja tensión, etc. 2.2.4 Múltiples unidades diésel
Las múltiples unidades diésel (DMUs) son múltiples trenes unitarios autónomos que tienen los motores diésel como su planta de energía y, por lo general, proporcionan el transporte de pasajeros en las áreas de servicios urbanos, suburbanos e interregionales que no están electrificadas o están parcialmente electrificadas. En algunos casos, se pueden utilizar como los trenes de servicio (reparación, instrumentación, etc.) y, a menudo, como el transporte de carga para las empresas y
19
fábricas situadas en las zonas urbanas o suburbios, proporcionando la competencia en este sector para locomotoras de maniobra, que se utilizan con frecuencia para mover carga especial o vagones de carga convencionales. Los principales elementos de diseño de equipos en DMUs son similares a las locomotoras diésel.
De forma similar a las unidades múltiples eléctricas, los trenes DMU consisten en la cabina, el motor y/o coches de remolque en un esquema de diseño clásico. La principal diferencia con los ferrocarriles eléctricos es que, en lugar de los pantógrafos y circuitos de control eléctricos de equipos de alta tensión, los automóviles tienen plantas de energía diésel que producen energía transformada a los motores de tracción (transmisión de tracción).
Para las locomotoras diésel hay diferentes formas de transmisión de energía. Por lo tanto, los DMU se puede dividir en tres categorías:
• Diesel-eléctrico (DEMU). • Diesel-mecánico (DMMU). • Diesel-hidráulico (DHMU).
La transmisión eléctrica ha encontrado aplicaciones mucho más amplias en
comparación con los demás. En cuanto a las locomotoras diésel, generalmente se utilizan transmisiones hidráulicas y mecánicas con motores de baja potencia diésel.
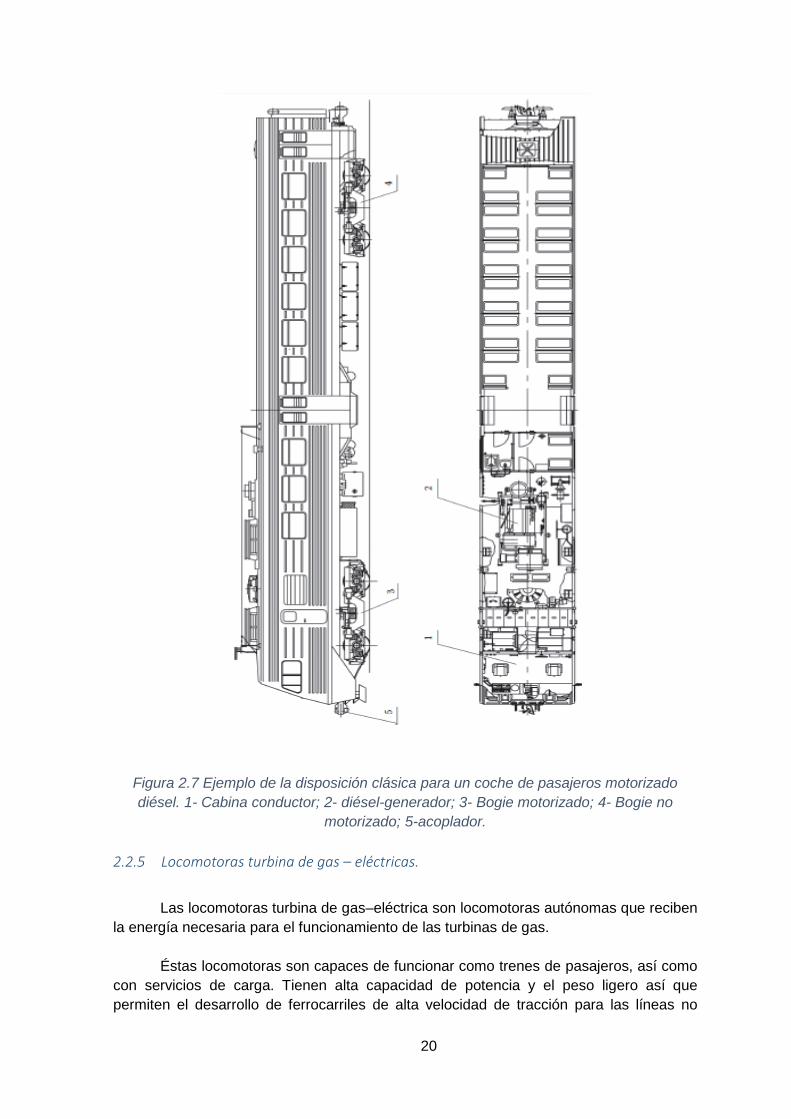
Hay dos lugares comunes para la planta de energía en los trenes DMU. La primera es el sistema tradicional (Figura 2.7), en el que el motor diésel está instalado en el coche que circula detrás de la cabina del conductor. En este caso, este compartimiento tiene insonorización en ambos lados de la cabina del conductor y del habitáculo. La ventaja de este tipo de diseño es un mejor acceso al motor diésel durante el servicio o reparación de obras. Sin embargo, se reduce significativamente el tamaño del compartimiento de pasajeros.
Para aumentar la capacidad de pasajeros en los trenes DMU modernos (Figura
2.8), la unidad de diésel a menudo se coloca en el espacio bajo el suelo entre los bogies del motor o los coches de conducción. En este caso, las centrales se componen de paquetes especiales llamados módulos. Si hay un fallo, entonces el módulo en cuestión simplemente se sustituye por uno nuevo. Los motores de estos módulos son generalmente planas, donde los motores de pistones se mueven en un plano horizontal. Esto es necesario para la reducción de la altura de los motores diésel.
Una de las tendencias en el desarrollo de múltiples unidades diésel es la
aplicación de una configuración donde los coches de conducción, motor y remolque autónomos, con pequeñas modificaciones, pueden utilizarse como no autónomos (eléctrica) en un ferrocarril electrificado. En tales casos, es necesario que se una con un vehículo ferroviario con motor que les proporcione el suministro de energía eléctrica requerida por su propio inversor por medio de conexiones eléctricas entre vagones existentes. Dependiendo de la configuración del tren, se pueden utilizar uno o más vehículos ferroviarios de propulsión.
20
Figura 2.7 Ejemplo de la disposición clásica para un coche de pasajeros motorizado diésel. 1- Cabina conductor; 2- diésel-generador; 3- Bogie motorizado; 4- Bogie no
motorizado; 5-acoplador.
2.2.5 Locomotoras turbina de gas – eléctricas.
Las locomotoras turbina de gas–eléctrica son locomotoras autónomas que reciben la energía necesaria para el funcionamiento de las turbinas de gas.
Éstas locomotoras son capaces de funcionar como trenes de pasajeros, así como
con servicios de carga. Tienen alta capacidad de potencia y el peso ligero así que permiten el desarrollo de ferrocarriles de alta velocidad de tracción para las líneas no
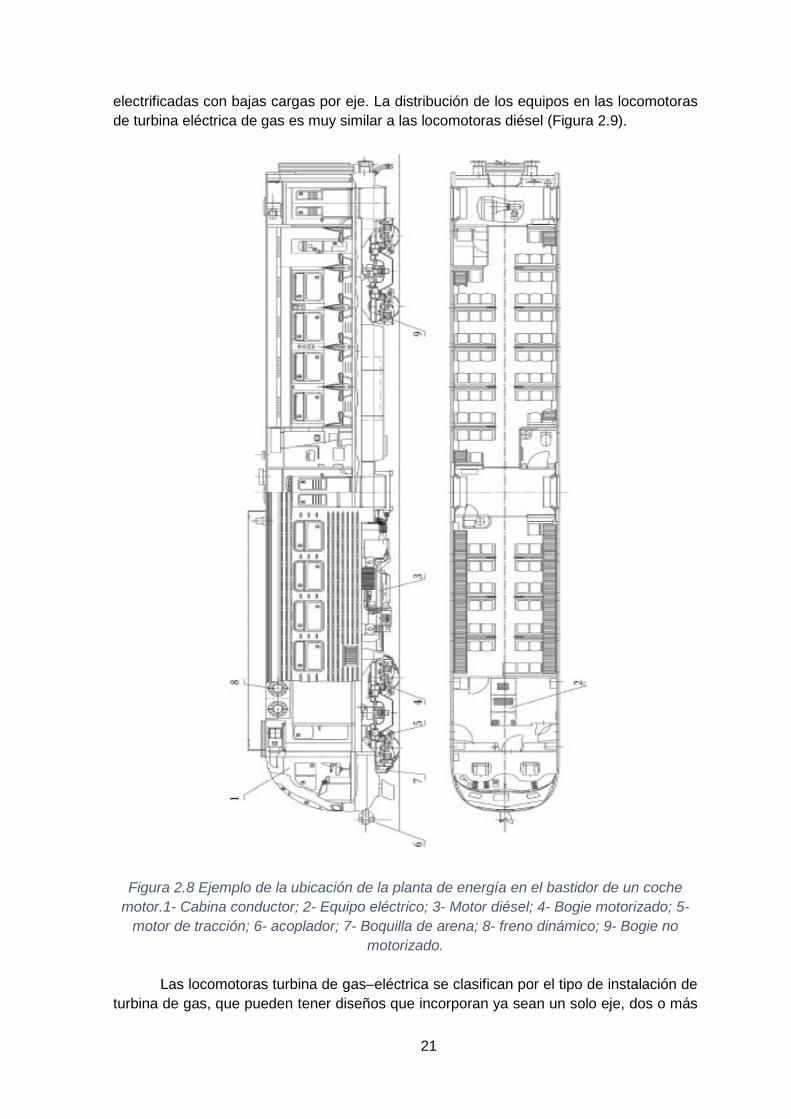
21
electrificadas con bajas cargas por eje. La distribución de los equipos en las locomotoras de turbina eléctrica de gas es muy similar a las locomotoras diésel (Figura 2.9).
Figura 2.8 Ejemplo de la ubicación de la planta de energía en el bastidor de un coche motor.1- Cabina conductor; 2- Equipo eléctrico; 3- Motor diésel; 4- Bogie motorizado; 5-
motor de tracción; 6- acoplador; 7- Boquilla de arena; 8- freno dinámico; 9- Bogie no motorizado.
Las locomotoras turbina de gas–eléctrica se clasifican por el tipo de instalación de
turbina de gas, que pueden tener diseños que incorporan ya sean un solo eje, dos o más
22
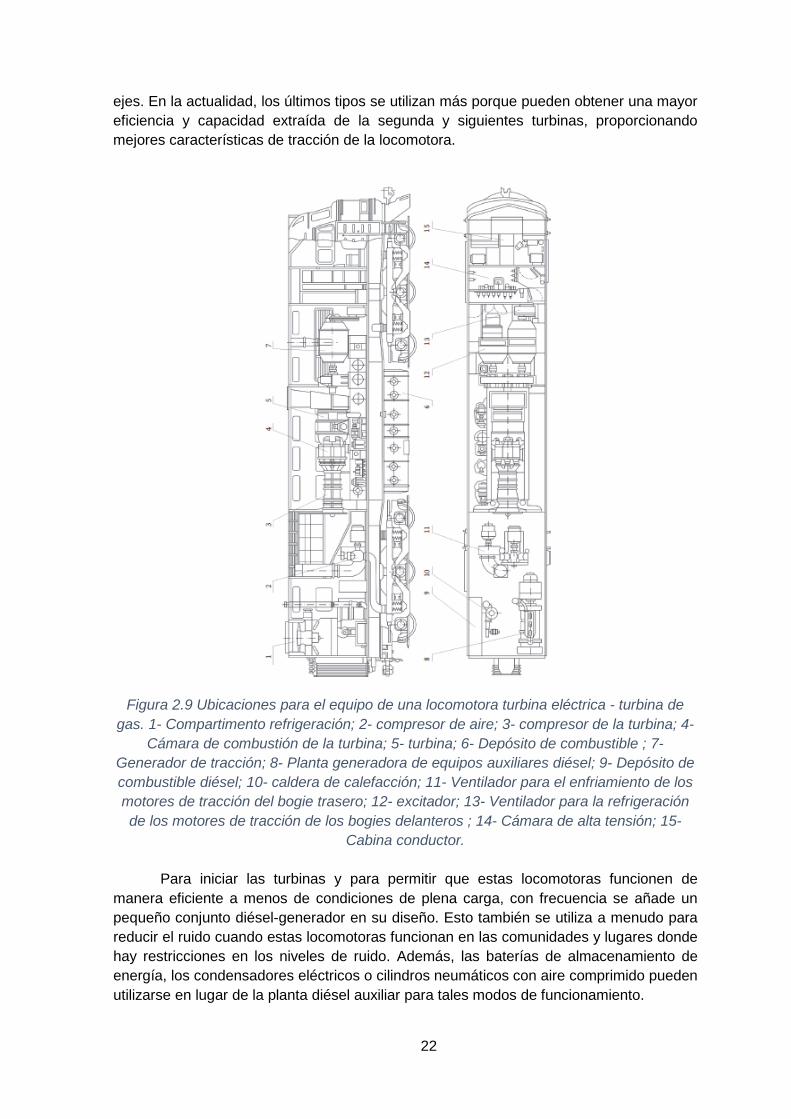
ejes. En la actualidad, los últimos tipos se utilizan más porque pueden obtener una mayor eficiencia y capacidad extraída de la segunda y siguientes turbinas, proporcionando mejores características de tracción de la locomotora.
Figura 2.9 Ubicaciones para el equipo de una locomotora turbina eléctrica - turbina de
gas. 1- Compartimento refrigeración; 2- compresor de aire; 3- compresor de la turbina; 4- Cámara de combustión de la turbina; 5- turbina; 6- Depósito de combustible ; 7-
Generador de tracción; 8- Planta generadora de equipos auxiliares diésel; 9- Depósito de combustible diésel; 10- caldera de calefacción; 11- Ventilador para el enfriamiento de los motores de tracción del bogie trasero; 12- excitador; 13- Ventilador para la refrigeración de los motores de tracción de los bogies delanteros ; 14- Cámara de alta tensión; 15-
Cabina conductor.
Para iniciar las turbinas y para permitir que estas locomotoras funcionen de manera eficiente a menos de condiciones de plena carga, con frecuencia se añade un pequeño conjunto diésel-generador en su diseño. Esto también se utiliza a menudo para reducir el ruido cuando estas locomotoras funcionan en las comunidades y lugares donde hay restricciones en los niveles de ruido. Además, las baterías de almacenamiento de energía, los condensadores eléctricos o cilindros neumáticos con aire comprimido pueden utilizarse en lugar de la planta diésel auxiliar para tales modos de funcionamiento.
23
Los tipos de transmisión son idénticos a los utilizados en las locomotoras diésel. Recientemente, la transmisión eléctrica equipada con un diseño de control de frecuencia de AC-AC ha encontrado una amplia aplicación.
Las principales ventajas de esta solución de diseño son la alta potencia y un diseño simple, así como el bajo precio del combustible de gas. Las principales desventajas son una eficiencia reducida que varía significativamente en diferentes modos de funcionamiento, la necesidad de un equipo adicional para un funcionamiento inferior a plena carga y el alto nivel de ruido aerodinámico de la turbina. Teniendo en cuenta el alto consumo de combustible, se puede añadir en la configuración del tren un coche motor adicional con un depósito de combustible, con el fin de aumentar las distancias operativas para locomotoras de turbina de gas. 2.2.6 Locomotoras híbridas
El alto nivel de competencia en el mercado del transporte, el endurecimiento de los requisitos para la protección del medio ambiente y los nuevos límites en el consumo de recursos de hidrocarburos ha provocado que las comunidades de ingeniería de transporte se vean sustancialmente involucradas en el desarrollo y la introducción de nuevas tecnologías, en particular para las locomotoras, en las que se incluyen locomotoras híbridas.
Gracias a su diseño, estos vehículos son similares a las locomotoras diésel y turbinas de gas; una diferencia significativa es que, además de las plantas de potencia diésel o turbina de gas, las locomotoras híbridas también utilizan la energía eléctrica almacenada en baterías eléctricas, supercondensadores o volantes de inercia. El proceso de carga de estos componentes se produce durante el funcionamiento del generador diésel o turbina de gas al ralentí, o cuando la energía cinética del frenado (tanto del tren y la locomotora) se transforma en energía eléctrica. Durante el funcionamiento de acarreo (modo de tracción), la combinación de energías puede utilizarse cuando se requiera energía adicional para la aceleración o para viajar hasta gradientes largos. Además de transformación y transmisión de energía a las ruedas de la locomotora, se hace de una manera similar a la realizada en locomotoras diésel o turbinas eléctricas.
La clasificación de los principales sistemas (mecánico, eléctrico, hidráulico y neumático) en las locomotoras híbridas es similar a la de las diésel. Para esta clasificación, se pueden añadir los siguientes diseños de hibridación:
• Diseño híbrido sin almacenamiento interno de energía, sólo las unidades de almacenamiento externo (la energía de la red híbrida se almacena en las plantas de suministro de energía o pone a disposición de otros vehículos de tracción ferroviaria a través de los equipos de la línea aérea).
• Construcción híbrida con unidades de acumulador interno (almacenamiento de energía interna híbrida autónoma).
• Estructuras híbridas complejas que combinan varias variedades de estos tipos.
24
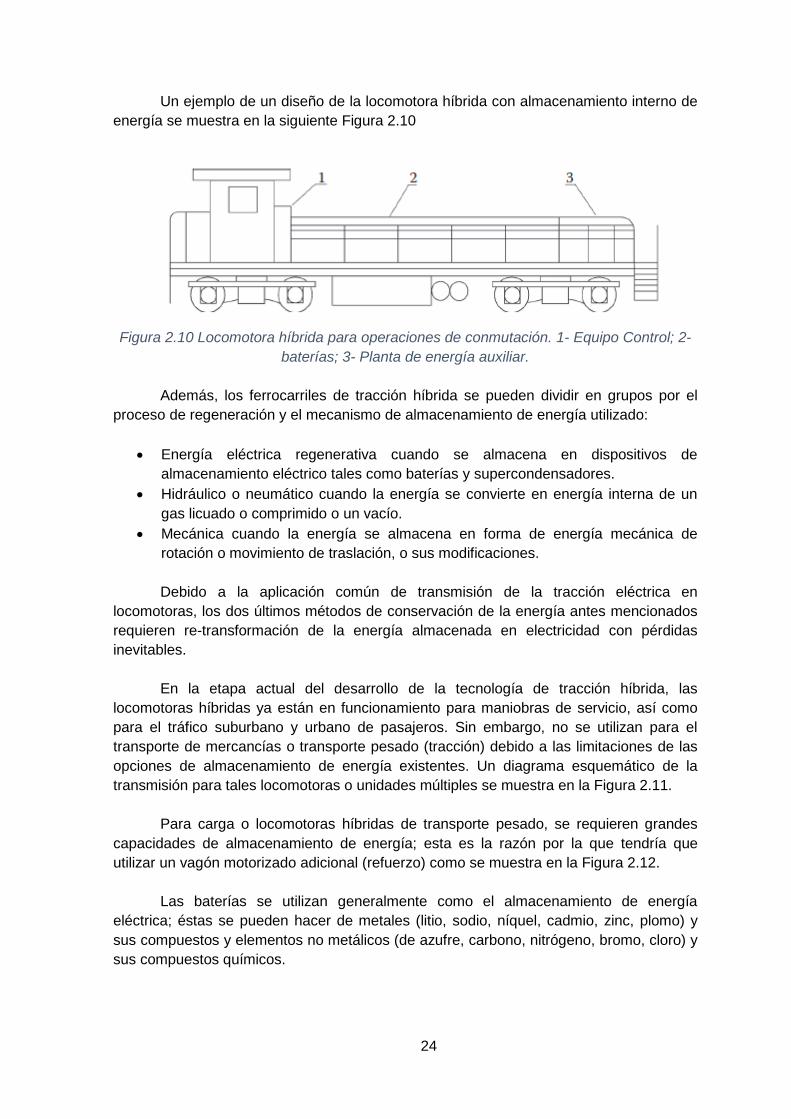
Un ejemplo de un diseño de la locomotora híbrida con almacenamiento interno de energía se muestra en la siguiente Figura 2.10
Figura 2.10 Locomotora híbrida para operaciones de conmutación. 1- Equipo Control; 2-
baterías; 3- Planta de energía auxiliar.
Además, los ferrocarriles de tracción híbrida se pueden dividir en grupos por el proceso de regeneración y el mecanismo de almacenamiento de energía utilizado:
• Energía eléctrica regenerativa cuando se almacena en dispositivos de almacenamiento eléctrico tales como baterías y supercondensadores.
• Hidráulico o neumático cuando la energía se convierte en energía interna de un gas licuado o comprimido o un vacío.
• Mecánica cuando la energía se almacena en forma de energía mecánica de rotación o movimiento de traslación, o sus modificaciones.
Debido a la aplicación común de transmisión de la tracción eléctrica en
locomotoras, los dos últimos métodos de conservación de la energía antes mencionados requieren re-transformación de la energía almacenada en electricidad con pérdidas inevitables.
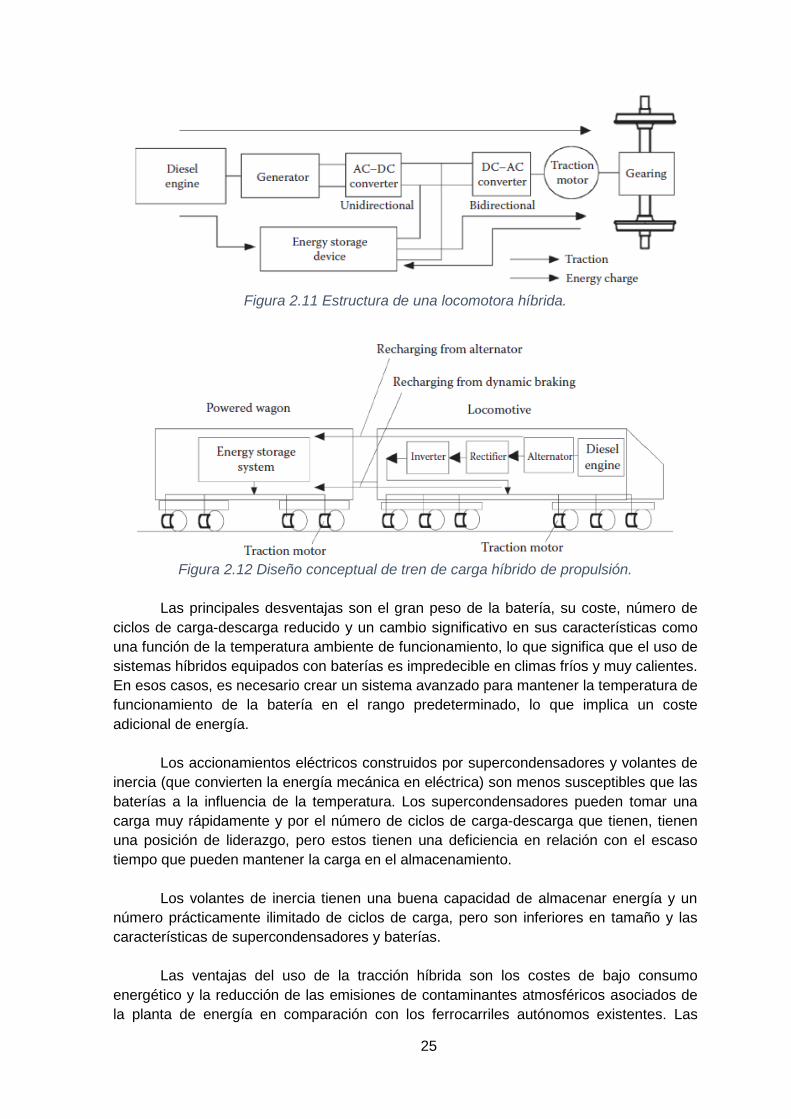
En la etapa actual del desarrollo de la tecnología de tracción híbrida, las locomotoras híbridas ya están en funcionamiento para maniobras de servicio, así como para el tráfico suburbano y urbano de pasajeros. Sin embargo, no se utilizan para el transporte de mercancías o transporte pesado (tracción) debido a las limitaciones de las opciones de almacenamiento de energía existentes. Un diagrama esquemático de la transmisión para tales locomotoras o unidades múltiples se muestra en la Figura 2.11.
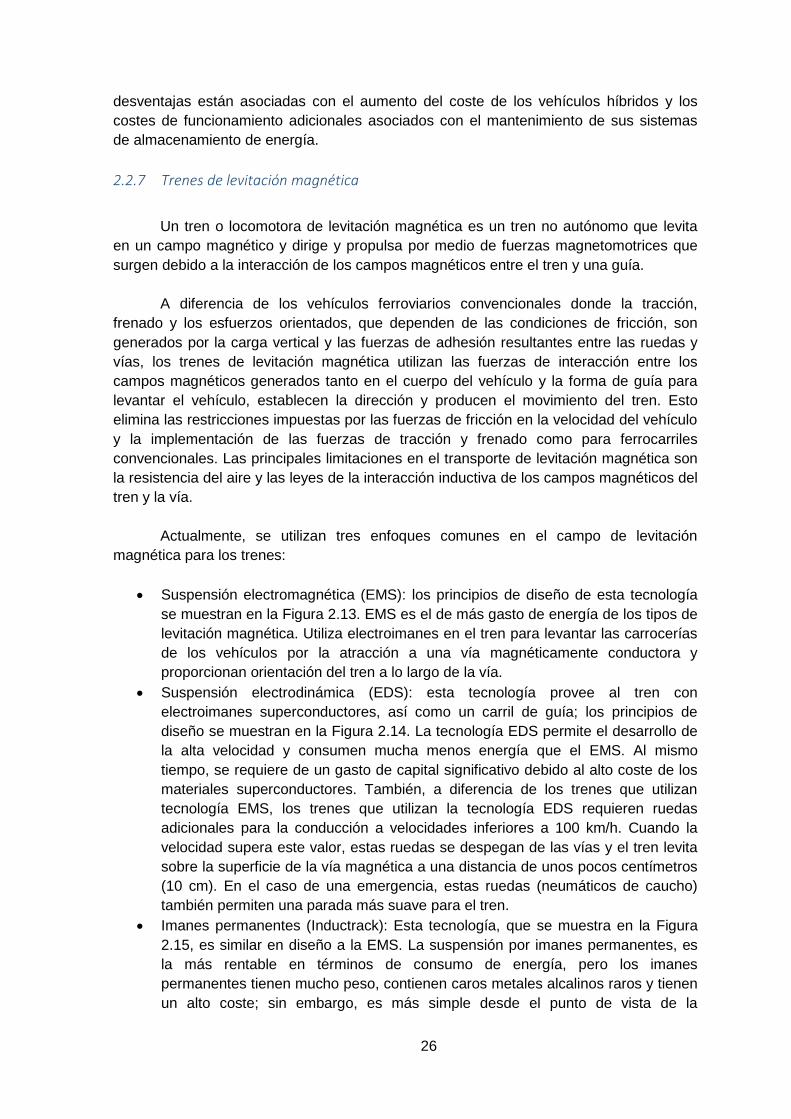
Para carga o locomotoras híbridas de transporte pesado, se requieren grandes
capacidades de almacenamiento de energía; esta es la razón por la que tendría que utilizar un vagón motorizado adicional (refuerzo) como se muestra en la Figura 2.12.
Las baterías se utilizan generalmente como el almacenamiento de energía
eléctrica; éstas se pueden hacer de metales (litio, sodio, níquel, cadmio, zinc, plomo) y sus compuestos y elementos no metálicos (de azufre, carbono, nitrógeno, bromo, cloro) y sus compuestos químicos.
25
Figura 2.11 Estructura de una locomotora híbrida.
Figura 2.12 Diseño conceptual de tren de carga híbrido de propulsión.
Las principales desventajas son el gran peso de la batería, su coste, número de
ciclos de carga-descarga reducido y un cambio significativo en sus características como una función de la temperatura ambiente de funcionamiento, lo que significa que el uso de sistemas híbridos equipados con baterías es impredecible en climas fríos y muy calientes. En esos casos, es necesario crear un sistema avanzado para mantener la temperatura de funcionamiento de la batería en el rango predeterminado, lo que implica un coste adicional de energía.
Los accionamientos eléctricos construidos por supercondensadores y volantes de inercia (que convierten la energía mecánica en eléctrica) son menos susceptibles que las baterías a la influencia de la temperatura. Los supercondensadores pueden tomar una carga muy rápidamente y por el número de ciclos de carga-descarga que tienen, tienen una posición de liderazgo, pero estos tienen una deficiencia en relación con el escaso tiempo que pueden mantener la carga en el almacenamiento.
Los volantes de inercia tienen una buena capacidad de almacenar energía y un número prácticamente ilimitado de ciclos de carga, pero son inferiores en tamaño y las características de supercondensadores y baterías.
Las ventajas del uso de la tracción híbrida son los costes de bajo consumo energético y la reducción de las emisiones de contaminantes atmosféricos asociados de la planta de energía en comparación con los ferrocarriles autónomos existentes. Las
26
desventajas están asociadas con el aumento del coste de los vehículos híbridos y los costes de funcionamiento adicionales asociados con el mantenimiento de sus sistemas de almacenamiento de energía. 2.2.7 Trenes de levitación magnética
Un tren o locomotora de levitación magnética es un tren no autónomo que levita en un campo magnético y dirige y propulsa por medio de fuerzas magnetomotrices que surgen debido a la interacción de los campos magnéticos entre el tren y una guía.
A diferencia de los vehículos ferroviarios convencionales donde la tracción, frenado y los esfuerzos orientados, que dependen de las condiciones de fricción, son generados por la carga vertical y las fuerzas de adhesión resultantes entre las ruedas y vías, los trenes de levitación magnética utilizan las fuerzas de interacción entre los campos magnéticos generados tanto en el cuerpo del vehículo y la forma de guía para levantar el vehículo, establecen la dirección y producen el movimiento del tren. Esto elimina las restricciones impuestas por las fuerzas de fricción en la velocidad del vehículo y la implementación de las fuerzas de tracción y frenado como para ferrocarriles convencionales. Las principales limitaciones en el transporte de levitación magnética son la resistencia del aire y las leyes de la interacción inductiva de los campos magnéticos del tren y la vía.
Actualmente, se utilizan tres enfoques comunes en el campo de levitación magnética para los trenes:
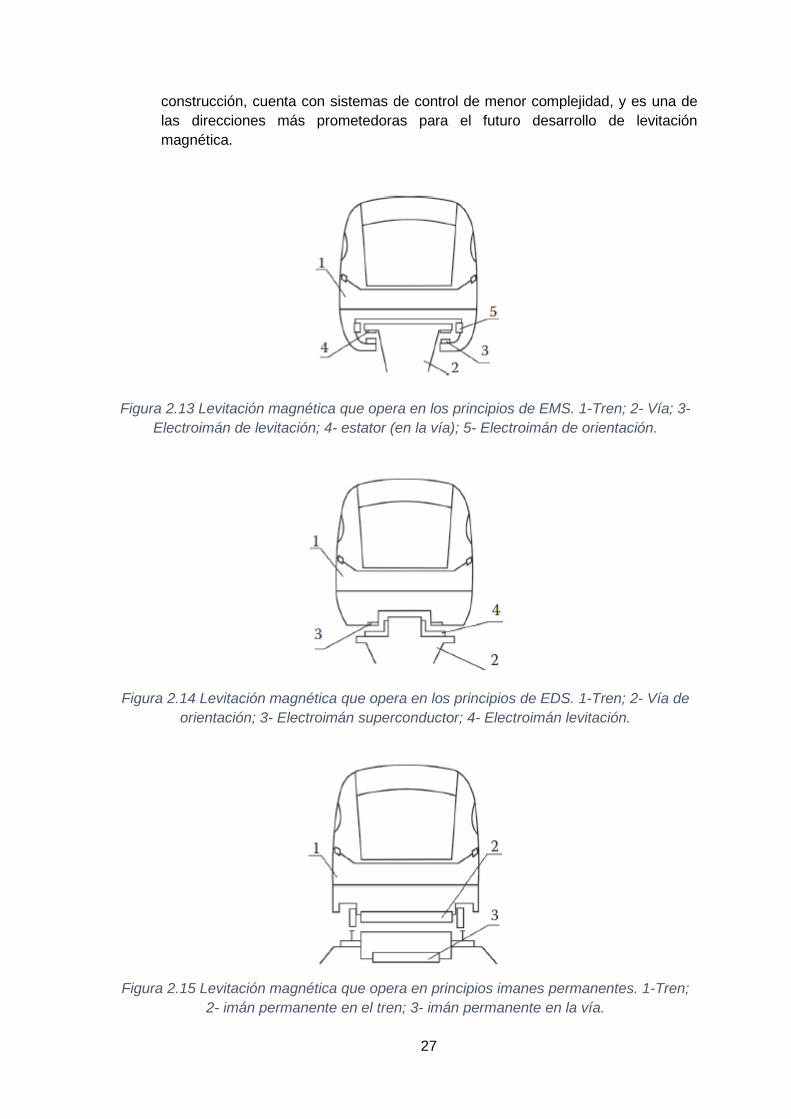
• Suspensión electromagnética (EMS): los principios de diseño de esta tecnología se muestran en la Figura 2.13. EMS es el de más gasto de energía de los tipos de levitación magnética. Utiliza electroimanes en el tren para levantar las carrocerías de los vehículos por la atracción a una vía magnéticamente conductora y proporcionan orientación del tren a lo largo de la vía.
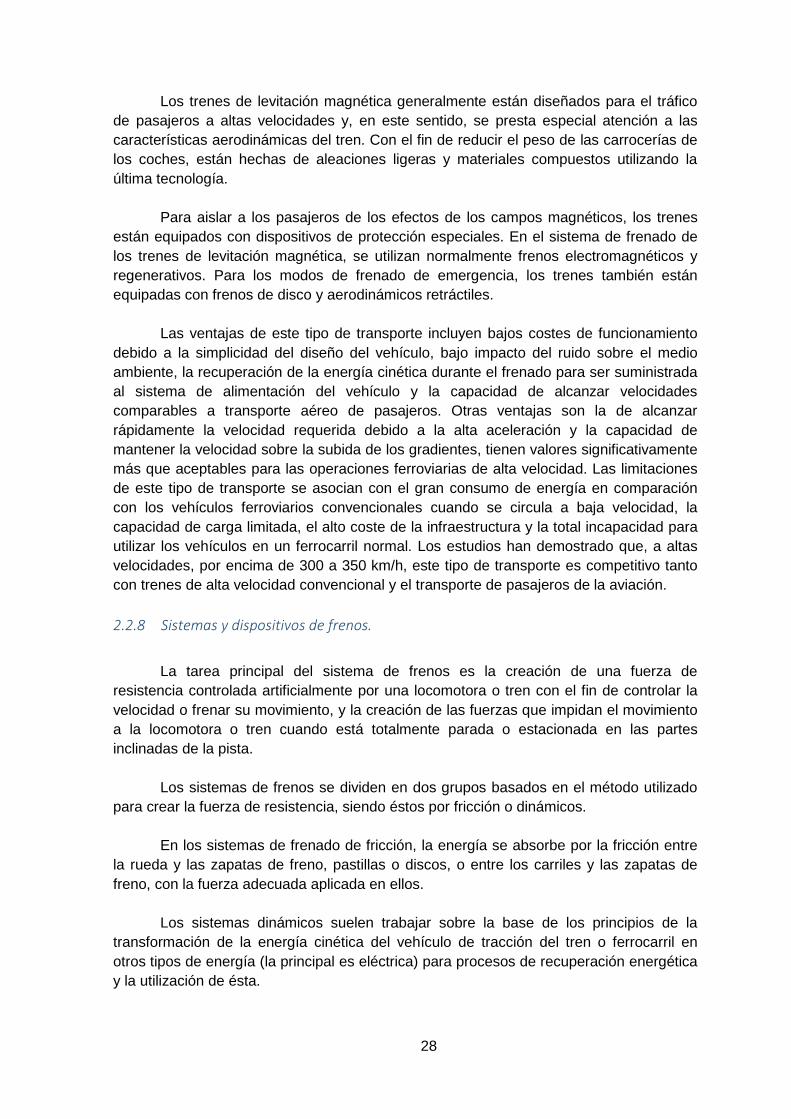
• Suspensión electrodinámica (EDS): esta tecnología provee al tren con electroimanes superconductores, así como un carril de guía; los principios de diseño se muestran en la Figura 2.14. La tecnología EDS permite el desarrollo de la alta velocidad y consumen mucha menos energía que el EMS. Al mismo tiempo, se requiere de un gasto de capital significativo debido al alto coste de los materiales superconductores. También, a diferencia de los trenes que utilizan tecnología EMS, los trenes que utilizan la tecnología EDS requieren ruedas adicionales para la conducción a velocidades inferiores a 100 km/h. Cuando la velocidad supera este valor, estas ruedas se despegan de las vías y el tren levita sobre la superficie de la vía magnética a una distancia de unos pocos centímetros (10 cm). En el caso de una emergencia, estas ruedas (neumáticos de caucho) también permiten una parada más suave para el tren.
• Imanes permanentes (Inductrack): Esta tecnología, que se muestra en la Figura 2.15, es similar en diseño a la EMS. La suspensión por imanes permanentes, es la más rentable en términos de consumo de energía, pero los imanes permanentes tienen mucho peso, contienen caros metales alcalinos raros y tienen un alto coste; sin embargo, es más simple desde el punto de vista de la
27
construcción, cuenta con sistemas de control de menor complejidad, y es una de las direcciones más prometedoras para el futuro desarrollo de levitación magnética.
Figura 2.13 Levitación magnética que opera en los principios de EMS. 1-Tren; 2- Vía; 3-
Electroimán de levitación; 4- estator (en la vía); 5- Electroimán de orientación.
Figura 2.14 Levitación magnética que opera en los principios de EDS. 1-Tren; 2- Vía de
orientación; 3- Electroimán superconductor; 4- Electroimán levitación.
Figura 2.15 Levitación magnética que opera en principios imanes permanentes. 1-Tren;
2- imán permanente en el tren; 3- imán permanente en la vía.
28
Los trenes de levitación magnética generalmente están diseñados para el tráfico de pasajeros a altas velocidades y, en este sentido, se presta especial atención a las características aerodinámicas del tren. Con el fin de reducir el peso de las carrocerías de los coches, están hechas de aleaciones ligeras y materiales compuestos utilizando la última tecnología.
Para aislar a los pasajeros de los efectos de los campos magnéticos, los trenes están equipados con dispositivos de protección especiales. En el sistema de frenado de los trenes de levitación magnética, se utilizan normalmente frenos electromagnéticos y regenerativos. Para los modos de frenado de emergencia, los trenes también están equipadas con frenos de disco y aerodinámicos retráctiles.
Las ventajas de este tipo de transporte incluyen bajos costes de funcionamiento debido a la simplicidad del diseño del vehículo, bajo impacto del ruido sobre el medio ambiente, la recuperación de la energía cinética durante el frenado para ser suministrada al sistema de alimentación del vehículo y la capacidad de alcanzar velocidades comparables a transporte aéreo de pasajeros. Otras ventajas son la de alcanzar rápidamente la velocidad requerida debido a la alta aceleración y la capacidad de mantener la velocidad sobre la subida de los gradientes, tienen valores significativamente más que aceptables para las operaciones ferroviarias de alta velocidad. Las limitaciones de este tipo de transporte se asocian con el gran consumo de energía en comparación con los vehículos ferroviarios convencionales cuando se circula a baja velocidad, la capacidad de carga limitada, el alto coste de la infraestructura y la total incapacidad para utilizar los vehículos en un ferrocarril normal. Los estudios han demostrado que, a altas velocidades, por encima de 300 a 350 km/h, este tipo de transporte es competitivo tanto con trenes de alta velocidad convencional y el transporte de pasajeros de la aviación. 2.2.8 Sistemas y dispositivos de frenos.
La tarea principal del sistema de frenos es la creación de una fuerza de resistencia controlada artificialmente por una locomotora o tren con el fin de controlar la velocidad o frenar su movimiento, y la creación de las fuerzas que impidan el movimiento a la locomotora o tren cuando está totalmente parada o estacionada en las partes inclinadas de la pista.
Los sistemas de frenos se dividen en dos grupos basados en el método utilizado para crear la fuerza de resistencia, siendo éstos por fricción o dinámicos.
En los sistemas de frenado de fricción, la energía se absorbe por la fricción entre la rueda y las zapatas de freno, pastillas o discos, o entre los carriles y las zapatas de freno, con la fuerza adecuada aplicada en ellos.
Los sistemas dinámicos suelen trabajar sobre la base de los principios de la transformación de la energía cinética del vehículo de tracción del tren o ferrocarril en otros tipos de energía (la principal es eléctrica) para procesos de recuperación energética y la utilización de ésta.
29
Basado en el método de la creación de la fuerza de control que actúa, los frenos se dividen en los siguientes tipos:
• Mecánico. • Neumático. • Eléctrico. • Hidráulico. • Magnético.
El sistema de frenos de vehículos ferroviarios con alimentación puede contener
varios tipos de frenos al mismo tiempo, tales como zapatas o discos, así como un freno de estacionamiento. Además, también puede estar equipado con frenos dinámicos, electromagnéticos y frenos de vía.
Los principales tipos de sistemas de frenado dinámico con recuperación de energía y sus componentes se describen con más detalle a continuación. 2.2.8.1 Sistemas de frenado dinámicos
La definición de un sistema de frenado dinámico cubre los sistemas que utilizan absorción de la energía cinética de los vehículos ferroviarios por medio de diversos efectos.
El principal tipo de freno dinámico utilizado en vehículos ferroviarios es el freno electromagnético. Este freno funciona sobre el principio de la reversibilidad de las máquinas eléctricas; cambia motores de tracción en el modo de generador. Cuando las corrientes eléctricas comienzan a producirse a partir de un proceso de este tipo, la energía se absorbe en una rueda o ruedas de rodadura sobre el carril, por el que se desarrolla la fuerza de frenado.
La energía obtenida de tal manera se puede utilizar de dos maneras. La primera manera es devolverla de nuevo a la línea de alimentación; en este caso, el freno electromagnético se llama un freno regenerativo. Tal solución de diseño se utiliza comúnmente en las locomotoras eléctricas o trenes eléctricos. Además de esto, se puede utilizar en vehículos ferroviarios autónomos que tienen la capacidad de almacenar dicha energía. Sin embargo, teniendo en cuenta la complejidad de este proceso, el segundo camino ha encontrado una amplia aplicación en comparación con la primera, y está basado en el principio de que la energía obtenida a partir de un proceso de frenado se disipa como calor en el circuito de choppers de freno o resistencias. Este tipo de freno electromagnético se llama freno dinámico o DB. En algunos países, también se conoce como un freno reostático.
En los trenes de levitación magnética la corriente producida por la energía cinética del tren, se transmite directamente a la línea de alimentación. Se puede explicar fácilmente por los principios de trabajo del motor lineal.
30
El siguiente tipo es el freno hidrodinámico; sus principios de trabajo se basan en el trabajo de las fuerzas de fricción que se plantean en el flujo del fluido. Tales frenos también se utilizan a menudo para los funcionamientos de alta velocidad. El diseño de un freno hidrodinámico es más a menudo representado como una turbina de agua, que está conectada a través de la unidad o montada directamente en el eje. Cuando el frenado se inicia, la turbina se alimenta con un líquido que comienza a circular en un circuito de potencia; debido al hecho de que el fluido tiene una viscosidad, hay resistencia y su circulación vaya acompañado por calentamiento. El calor generado se disipa en el medio ambiente a través de las paredes conductoras de calor de la turbina. 2.2.8.2 Frenado electromagnético
Los frenos electromagnéticos utilizan una fuerza electromagnética que surge al pasar una corriente eléctrica a través de solenoides. Un conjunto de electroimanes se fija con una suspensión elástica en el tren de rodaje de vehículos ferroviarios y la cabeza del imán se coloca sobre el carril. Cuando una corriente se suministra a un electroimán, se produce un campo magnético. El freno se mueve con el vehículo de tracción ferroviario e induce corrientes eléctricas en el carril. Como resultado de la interacción de los campos magnéticos, aparecen corrientes parásitas y conducen a la generación de una fuerza electromotriz que actúa como la fuerza de frenado. Los frenos electromagnéticos, cuando están funcionando en condiciones normales, no tienen contacto directo con el ferrocarril y se encuentran a cierta distancia de él. 2.2.8.3 Frenos de vía
Un freno de vía es normalmente un tipo de freno de fricción, en el que la fuerza de frenado se genera por la fricción entre el elemento de freno y un carril. Los frenos de vía se pueden clasificar como los siguientes tipos:
• Mecánico cuando el sistema de frenado se acciona por sistemas de palancas mecánicas.
• Neumático cuando los dispositivos de frenado se accionan por un sistema neumático.
• Hidráulico cuando los dispositivos de frenado se accionan por el sistema hidráulico.
Los frenos electromagnéticos también se pueden clasificar como frenos de vía cuando la fuerza de frenado generada por el efecto magnético se combina con la fuerza de fricción generada por el elemento de frotamiento que se apoya contra el carril. Los elementos de freno de fricción pueden funcionar sobre una superficie horizontal de la cabeza del carril (parte superior del carril) y en la superficie lateral del carril.
A diferencia de los frenos electromagnéticos que permiten la fijación rígida en el tren de rodaje, los frenos de vía se instalan con suspensión elástica de amortiguación con el fin de reducir el choque y la vibración causada por su interacción con el carril.
31
2.2.9 Clasificación de las locomotoras de tracción eléctrica
En la actualidad, la tracción eléctrica ha establecido una posición dominante en comparación con otras formas de tracción utilizadas en el transporte ferroviario. Esto se debe a la posibilidad de obtener características de esfuerzo de tracción hiperbólicas y una capacidad de amplio alcance para el control de un sistema de tracción para diversas condiciones de funcionamiento. Este último, en particular, ha estado disponible desde la introducción de las nuevas generaciones de dispositivos semiconductores de potencia (transistores y tiristores) y gestión de dispositivos basados en tecnología de microprocesadores para una amplia gama de topologías de AC–AC y AC–DC de tracción. El nivel de desarrollo permite procesar algoritmos complejos en sistemas de control de locomotoras, incluyendo modos de funcionamiento en un entorno de tiempo real. Esto se relaciona con la consecución de los coeficientes de tracción en los vehículos de tracción ferroviaria modernos de hasta 50%. Actualmente, los ferrocarriles utilizan cuatro tipos de topologías para la tracción eléctrica: DC, AC–DC, AC–AC con frecuencia variable y DC–AC. La tracción DC tiene un gran inconveniente a grandes distancias del generador principal, y esta es la razón por la que fue sustituido por un alternador (un generador síncrono AC) que es significativamente más pequeño en tamaño. Por la misma razón, las locomotoras utilizan topologías de tracción AC–DC o AC–AC. Para las locomotoras eléctricas que circulan en un sistema de electrificación DC, las locomotoras pueden utilizar una topología de DC–AC con tensión y frecuencia variable o una topología de DC–DC con control de ancho de pulso. Sin embargo, es común llamar locomotoras AC o locomotoras DC basándose en el tipo de energía eléctrica que se suministra a sus motores de tracción. Sin embargo, esto no indica lo que otros componentes del sistema de tracción, como un alternador o generador y así sucesivamente, se han instalado en un vehículo de tracción ferroviaria.
En esta sección se presenta una descripción de los tipos de tracción más utilizados que funcionan con motores de tracción DC y AC. 2.2.9.1 Tracción con corriente continua
La tracción eléctrica con motores DC contempla casi el 40% del mercado de las locomotoras fabricadas. Las ventajas de este sistema de tracción son la facilidad de control de la velocidad y el par de motores de tracción DC, y la facilidad de conmutación de un motor al modo de generador para el funcionamiento de frenado dinámico. Los semiconductores necesarios para la producción de este tipo de sistema de tracción pueden ser muy simples en comparación con los sistemas de tracción AC. El control de la velocidad de rotación de estos motores de tracción se puede lograr utilizando múltiples variantes de su conexión a la fuente de suministro de energía y también diferentes variantes de la conexión de sus devanados. Las locomotoras eléctricas DC utilizan diferentes configuraciones para incorporar motores de tracción en el sistema de tracción:
• Conexión en serie (S) cuando todos los motores de tracción están conectados en serie siempre que la caída de tensión en los bornes del motor sea directamente proporcional al número de motores utilizados para funcionar a velocidades lentas.
32
• Conexión en paralelo (P) cuando los motores de tracción están conectados directamente a la fuente de suministro de energía en paralelo entre sí. Esta configuración se utiliza para obtener la tensión máxima en los bornes de los motores de tracción y, por lo tanto, para alcanzar la velocidad máxima de los vehículos de tracción.
• Serie-Paralelo (SP) cuando los motores de tracción están conectados en conexión en serie para formar un grupo comúnmente, los grupos por locomotora son dos o más y los grupos están conectados a la fuente de alimentación en paralelo.
El control de velocidad de los motores DC se realiza mediante el control de la
tensión del inducido y el ajuste del devanado de campo. Se pueden emplear convertidores DC–DC para controlar tanto la tensión del inducido como la de campo. Se puede obtener un control adicional mediante el uso de resistencias en derivación para ajustar la corriente de campo.
Las desventajas de este tipo de sistema de tracción incluyen un consumo elevado de metales no ferrosos, la complejidad del diseño de los motores de tracción, así como la presencia del sistema colector-escobillas. El sistema colector-escobillas limita la tensión máxima del estator y es vulnerable a los fallos repentinos durante las situaciones de carga dinámica. Por otra parte, necesita intervalos de mantenimiento frecuentes, con un tiempo de servicio significativo en comparación con los motores de inducción. Los motores DC son inferiores a los AC en términos de peso, tamaño y precio. Además, es casi imposible aplicar una potencia elevada (> 1.500 kW por eje) en los diseños existentes de motores de tracción DC.
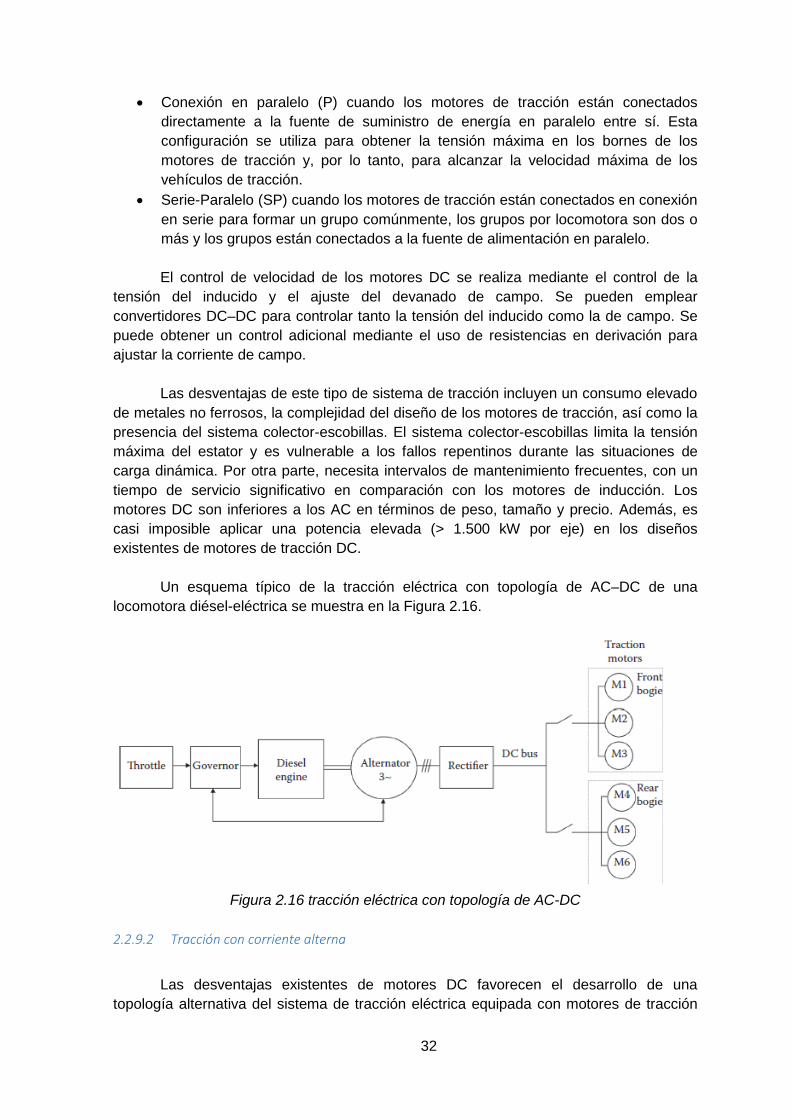
Un esquema típico de la tracción eléctrica con topología de AC–DC de una
locomotora diésel-eléctrica se muestra en la Figura 2.16.
Figura 2.16 tracción eléctrica con topología de AC-DC
2.2.9.2 Tracción con corriente alterna
Las desventajas existentes de motores DC favorecen el desarrollo de una topología alternativa del sistema de tracción eléctrica equipada con motores de tracción
33
AC. La aplicación de motores de tracción AC requiere que coincida con el nivel de tensión entre una fuente de suministro de energía y un motor, así como el uso de un convertidor de frecuencia sofisticado o inversor para ajustar la velocidad de rotación.
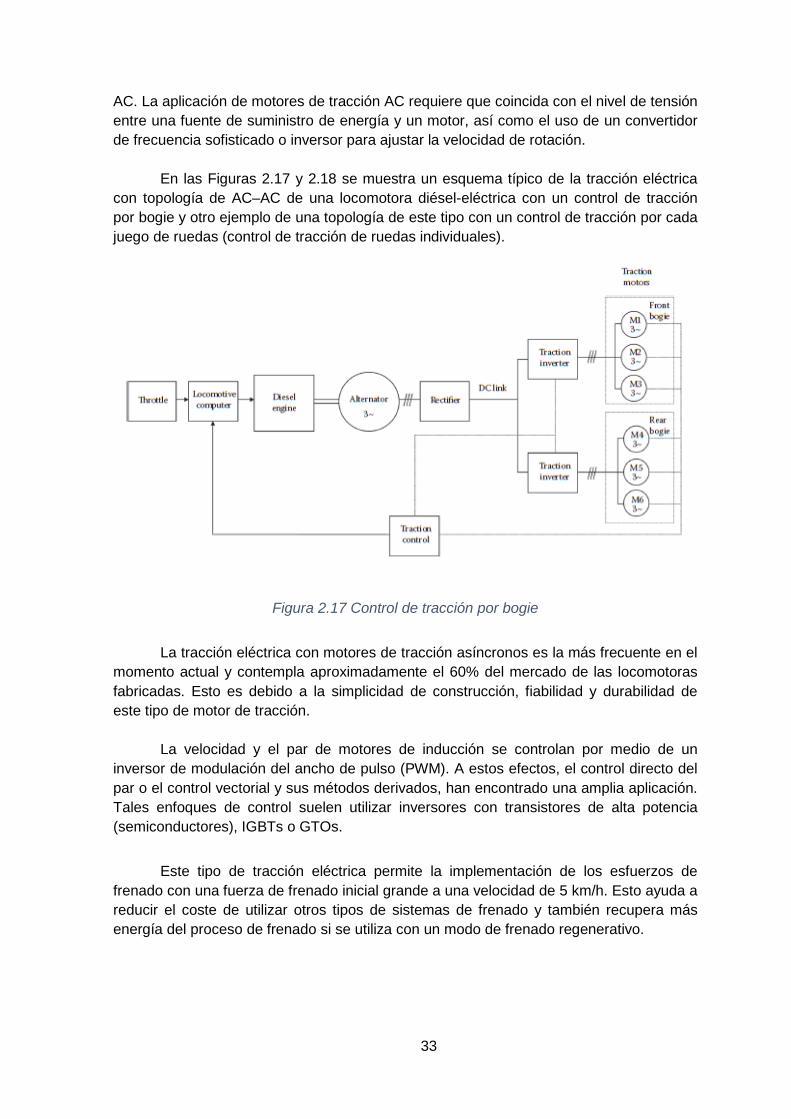
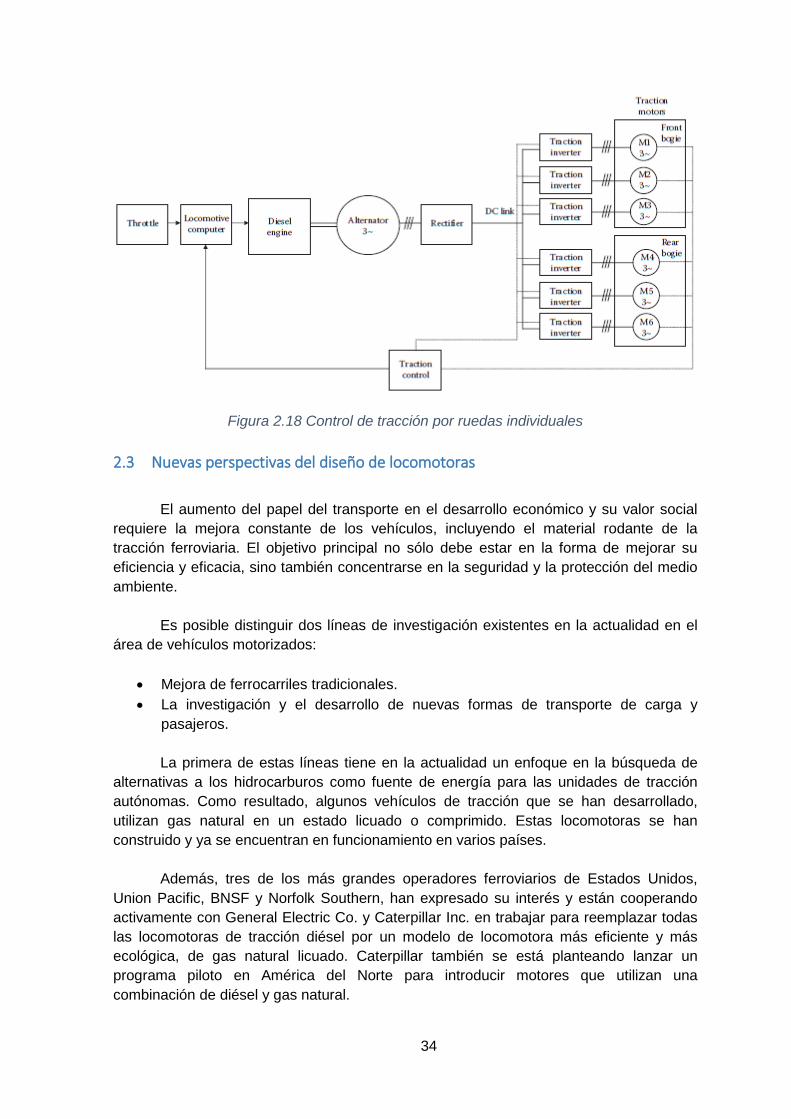
En las Figuras 2.17 y 2.18 se muestra un esquema típico de la tracción eléctrica con topología de AC–AC de una locomotora diésel-eléctrica con un control de tracción por bogie y otro ejemplo de una topología de este tipo con un control de tracción por cada juego de ruedas (control de tracción de ruedas individuales).
Figura 2.17 Control de tracción por bogie
La tracción eléctrica con motores de tracción asíncronos es la más frecuente en el momento actual y contempla aproximadamente el 60% del mercado de las locomotoras fabricadas. Esto es debido a la simplicidad de construcción, fiabilidad y durabilidad de este tipo de motor de tracción.
La velocidad y el par de motores de inducción se controlan por medio de un
inversor de modulación del ancho de pulso (PWM). A estos efectos, el control directo del par o el control vectorial y sus métodos derivados, han encontrado una amplia aplicación. Tales enfoques de control suelen utilizar inversores con transistores de alta potencia (semiconductores), IGBTs o GTOs.
Este tipo de tracción eléctrica permite la implementación de los esfuerzos de frenado con una fuerza de frenado inicial grande a una velocidad de 5 km/h. Esto ayuda a reducir el coste de utilizar otros tipos de sistemas de frenado y también recupera más energía del proceso de frenado si se utiliza con un modo de frenado regenerativo.
34
Figura 2.18 Control de tracción por ruedas individuales
2.3 Nuevas perspectivas del diseño de locomotoras
El aumento del papel del transporte en el desarrollo económico y su valor social requiere la mejora constante de los vehículos, incluyendo el material rodante de la tracción ferroviaria. El objetivo principal no sólo debe estar en la forma de mejorar su eficiencia y eficacia, sino también concentrarse en la seguridad y la protección del medio ambiente.
Es posible distinguir dos líneas de investigación existentes en la actualidad en el área de vehículos motorizados:
• Mejora de ferrocarriles tradicionales. • La investigación y el desarrollo de nuevas formas de transporte de carga y
pasajeros.
La primera de estas líneas tiene en la actualidad un enfoque en la búsqueda de alternativas a los hidrocarburos como fuente de energía para las unidades de tracción autónomas. Como resultado, algunos vehículos de tracción que se han desarrollado, utilizan gas natural en un estado licuado o comprimido. Estas locomotoras se han construido y ya se encuentran en funcionamiento en varios países.
Además, tres de los más grandes operadores ferroviarios de Estados Unidos, Union Pacific, BNSF y Norfolk Southern, han expresado su interés y están cooperando activamente con General Electric Co. y Caterpillar Inc. en trabajar para reemplazar todas las locomotoras de tracción diésel por un modelo de locomotora más eficiente y más ecológica, de gas natural licuado. Caterpillar también se está planteando lanzar un programa piloto en América del Norte para introducir motores que utilizan una combinación de diésel y gas natural.
35
También hay algunas investigaciones y trabajos de diseño experimental para la aplicación de productos de carbón como combustible para vehículos ferroviarios. Sin embargo, la gran cantidad de impurezas emitidas que afectan negativamente al medio ambiente no permite actualmente avanzar estas opciones que siguen siendo una solución problemática a la necesidad de fuentes de energía alternativa.
La opción más prometedora según muchos expertos es la aplicación de pilas de combustible que convierten la energía química del hidrógeno o alcoholes para producir energía eléctrica en la forma más directa. Las pilas de combustible que trabajan el hidrógeno como combustible emiten el producto de combustión más limpio para el medio ambiente en comparación con otros combustibles en estado de vapor.
Las locomotoras con motores atómicos también son una posible alternativa a los modos existentes de propulsión de transporte ferroviario. El equipo principal sería muy similar a la de las locomotoras existentes, pero la fuente de energía sería un reactor nuclear que calienta el fluido (agua) a su estado vaporizado que se hace pasar a través de un bucle cerrado hacia una turbina que está conectada con un generador eléctrico. Sin embargo, la introducción de las centrales nucleares en el transporte ferroviario se ve limitado de manera significativa por la seguridad y el medio ambiente.
También, en la primera línea de investigación se está prestando mucha atención a la mejora de los elementos de diseño existentes y soluciones para mejorar la eficacia de la locomotora:
• Mejorar las características de tracción y frenado: para mejorar las características de tracción y frenado, se está avanzando en el desarrollo de nuevos diseños de rodadura, lo que permitiría una redistribución de cargas entre los ejes y entre las ruedas de un eje en tiempo real, en función de los esfuerzos de tracción. En vista del hecho de que los trenes modernos casi han agotado el coeficiente de adherencia disponible entre las ruedas y rieles, todavía hay algunos trabajos a realizar para mejorar esto. Esto se puede conseguir mediante el uso de nuevos materiales para las superficies de rodadura por medio de la introducción de nuevos métodos tales como el térmico, químico y procesamiento mecánico, así como el uso de diferentes procesos físicos y químicos para el desarrollo de nuevos dispositivos, que se puede situar en vehículos ferroviarios. Ya existen algunos ejemplos de tales dispositivos, pero todavía no son soluciones perfectas. Estas soluciones pueden incluir un dispositivo de limpieza química usando varios gases para superficies de rodadura, que permiten la eliminación de la película de óxido, aumentando así el coeficiente de fricción. Algunos dispositivos también pueden limpiar superficies de rodadura utilizando corrientes eléctricas de alta frecuencia. Además, la creación de campos magnéticos entre la rueda y el carril puede aumentar la tracción. Sin embargo, estas tecnologías son muy difíciles de implementar, y requeriría una extensa investigación científica que luego debe implementarse como una solución estructural separada. Puede ser una buena solución utilizar motores de reluctancia conmutada como motores de tracción. Estos motores no tienen los inconvenientes de los que se utilizan actualmente, y tienen características de bajo peso y carga que reúnen las características de tracción de la locomotora.
36
• La reducción del impacto del tren de rodaje de vehículos ferroviarios con las vías y la mejora de la comodidad de los pasajeros: Mejorar el diseño de los engranajes de tracción y las locomotoras y otros vehículos ferroviarios motorizados debería permitir una mayor reducción del peso no suspendido de los trenes y también reducir las pérdidas por fricción en la caja de cambios, en particular mediante el uso de ruedas motorizadas. Se pueden lograr mejoras en el funcionamiento de los trenes de cargas pesadas y de alta velocidad por medio de dispositivos especialmente desarrollados que controlan y luego suavizan los efectos longitudinales y transversales del tren. Para mejorar la comodidad de los pasajeros, se pueden utilizar varios métodos para reducir las aceleraciones excesivas. Además de las soluciones existentes, tales como amortiguadores y dispositivos en las curvas de la inclinación, se recomiendan algunos enfoques avanzados para el desarrollo de la suspensión de muelles totalmente controlados. Esto requiere un estudio detallado de cómo las diferentes vibraciones y aceleraciones que afectan al cuerpo humano. En tales casos, el desarrollo de técnicas específicas para minimizar su impacto debería proporcionar mejores resultados que los dominantes en el momento actual.
• La utilización de la energía y la capacidad de los vehículos ferroviarios para reutilizarla para la tracción: muchos equipos de investigación, así como las grandes corporaciones industriales están bajo presión por cumplir con los requisitos exigidos por las nuevas normas sobre la contaminación del medio ambiente. Comenzaron a desarrollar con fuerza las tecnologías para la creación y producción de los dispositivos que puedan volver a utilizar la energía derivada de los modos de frenado de los vehículos ferroviarios. El combustible obtenido a partir de un proceso como este se puede volver a utilizar de nuevo en los motores diésel o pilas de combustible. Sin embargo, estas tecnologías tienen una baja eficiencia en comparación con las tecnologías híbridas que utilizan supercondensadores, baterías o volantes de inercia. Cuando se conduce un vehículo ferroviario convencional a velocidades de hasta 200 km/h, es posible ver que alrededor del 40% de la energía producida por la planta de propulsión se consume para la tracción (la energía cinética de los vehículos), otro 40% de la energía se consume en las oscilaciones naturales del tren de rodaje y sus interconexiones, otro 10% se gasta para superar las fuerzas de fricción en los sistemas y componentes de vehículos y las fuerzas de interacción entre las ruedas y vías, mientras que el último 10% es necesario para superar la resistencia del aire. Por lo tanto, sería una ventaja significativa ser capaz de utilizar la conversión de las oscilaciones naturales de partes del vehículo como una fuente adicional de energía. Este enfoque reduce el calentamiento del medio ambiente en comparación con el calentamiento que generan los sistemas de amortiguación modernos. La aplicación de generadores eléctricos como elementos de este tipo de nuevos sistemas debe permitir la consecución de una amortiguación exacta. La desventaja de esta tendencia es el aumento del consumo de metales eléctricos y no ferrosos, así como el uso de sistemas de control complejos para la suspensión y el acoplamiento de los vehículos ferroviarios, lo que aumentaría
37
considerablemente su coste, y también la eficiencia de la utilización de la energía producida por la planta de propulsión. En el momento actual, la segunda línea de investigación se basa
fundamentalmente en el diseño de nuevos ferrocarriles en lo que se considera que es la conjunción de tren, carretera, aire y oleoductos:
• Autobuses con ruedas de ferrocarril y vehículos para el uso combinado: el desarrollo de estos vehículos ha surgido debido a la posibilidad de utilizar infraestructuras existentes, como carreteras y ferrocarriles. Estos tipos de vehículos de tracción pueden favorecer la selección de las rutas más cortas. Por ejemplo, en la ausencia de una superficie de carretera adecuada, se puede utilizar una vía férrea con el fin de llegar al punto de destino para pasajeros y mercancías. Esa es una dificultad muy común para zonas con una alta densidad de población. Esta tecnología es conveniente para los pasajeros ya que la circulación de estos vehículos es directa y sin transferencias adicionales.
• Tren de levitación en el amortiguador de aire: en este tipo de trenes se utiliza una suspensión aerodinámica en lugar de magnética. Esta tecnología también se llama sistema de transporte de efecto suelo (GETS). Para proporcionar la propulsión en estos casos, se pueden utilizar motores lineales y turbinas con transmisión eléctrica. La principal desventaja del GETS es que se puede ver afectado por condiciones de clima extremo.
• Tren de vacío: este tren, también conocido como 'vactrains', supuestamente puede alcanzar velocidades de 6400–8000 km/h, es decir 5-6 veces la velocidad del sonido en el aire; estos trenes se moverían muy rápidamente debido a la falta de resistencia aerodinámica. Para los trenes de este tipo, es necesario construir un túnel con un sistema de vacío y de estaciones de apoyo al vacío. En este momento, estas instalaciones serían técnicamente difíciles y bastante caras. En este sentido, China, Japón, Suiza y Estados Unidos están llevando a cabo proyectos que no utilizan el vacío total, pero sólo parcialmente en los túneles o tuberías. En ese caso, estos trenes pueden alcanzar velocidades de 1000 a 1500 km/h.
Resumiendo lo anterior, es necesario decir que el coste de creación y desarrollo de nuevos tipos de vehículos ferroviarios y trenes, así como su infraestructura, es extremadamente alto. Sin embargo, las ventajas en velocidad, fiabilidad y coste del transporte muestran que estas direcciones progresarán y algunos pueden llegar a sustituir los tipos existentes de transporte.
38
3 VEHÍCULOS DE TRACCIÓN ALIMENTADOS CON PEMFC
Las locomotoras alimentadas mediante pilas de combustible combinan los beneficios ambientales de una locomotora alimentada mediante una línea eléctrica (catenaria) con la mayor eficiencia energética global y los costes reducidos de infraestructura de una locomotora eléctrico–diésel. Las locomotoras propulsadas mediante una línea eléctrica (catenaria), consideradas como un único componente de un sistema de distribución de energía eléctrica formado por una central generadora de energía eléctrica, transformadores y líneas de transporte de energía eléctrica, son las menos eficientes y las más costosas. Las locomotoras eléctrico–diésel, aun siendo colectivamente peores como fuentes de contaminación del aire que un número igual de locomotoras eléctricas (catenaria) alimentadas por una central térmica de carbón, son más eficientes energéticamente y tienen una infraestructura más barata. Se espera que las locomotoras de pilas de combustible sean ligeramente más eficientes desde el punto de vista energético que las locomotoras diésel, y debido a que su infraestructura de combustible será homóloga a la de una diésel, deberían tener costes similares de infraestructura de combustible. La eliminación de los elevados costes de infraestructura de las líneas eléctricas (catenaria) mediante el empleo de locomotoras de pilas de combustible, es la clave para defender la viabilidad económica de los trenes eléctricos en regiones con baja densidad de población.
Por otra parte, las locomotoras de pila de combustible pueden ayudar a resolver las cuestiones relacionadas con la calidad del aire y la seguridad energética nacional que afectan a la industria ferroviaria y del sector del transporte en su conjunto. Estas cuestiones están relacionadas por el hecho de que alrededor del 97% de la energía para el sector del transporte está basado en el petróleo, y más del 60% es importado. Se está desarrollando un prototipo de una locomotora híbrida alimentada mediante baterías y pilas de combustible para aplicaciones ferroviarias urbanas y militares y que tienen el potencial de: Reducir la contaminación del aire en las líneas de ferrocarril urbanas, en particular
en las asociadas a los puertos marítimos. Aumentar la seguridad energética del sistema de transporte ferroviario mediante
el uso de un combustible (hidrógeno) independiente del petróleo importado. Reducir las emisiones atmosféricas de gases de efecto invernadero.
Surgen varios retos de diseño e integración en la aplicación de un vehículo de pila
de combustible de hidrógeno grande. Peso, centro de gravedad, el embalaje, y la seguridad son factores de diseño que conducen a, entre otras características, la ubicación del sistema de almacenamiento de hidrógeno comprimido. Las duras condiciones de funcionamiento, en especial las cargas de choque durante el acoplamiento de vagones del ferrocarril, requieren sistemas de montaje de componentes capaces de absorber mucha energía. Además, el diseño del sistema debe abordar las regulaciones de la industria ferroviaria que rigen la seguridad y eventos tales como el descarrilamiento, impacto lateral, la recarga de combustible y el mantenimiento.
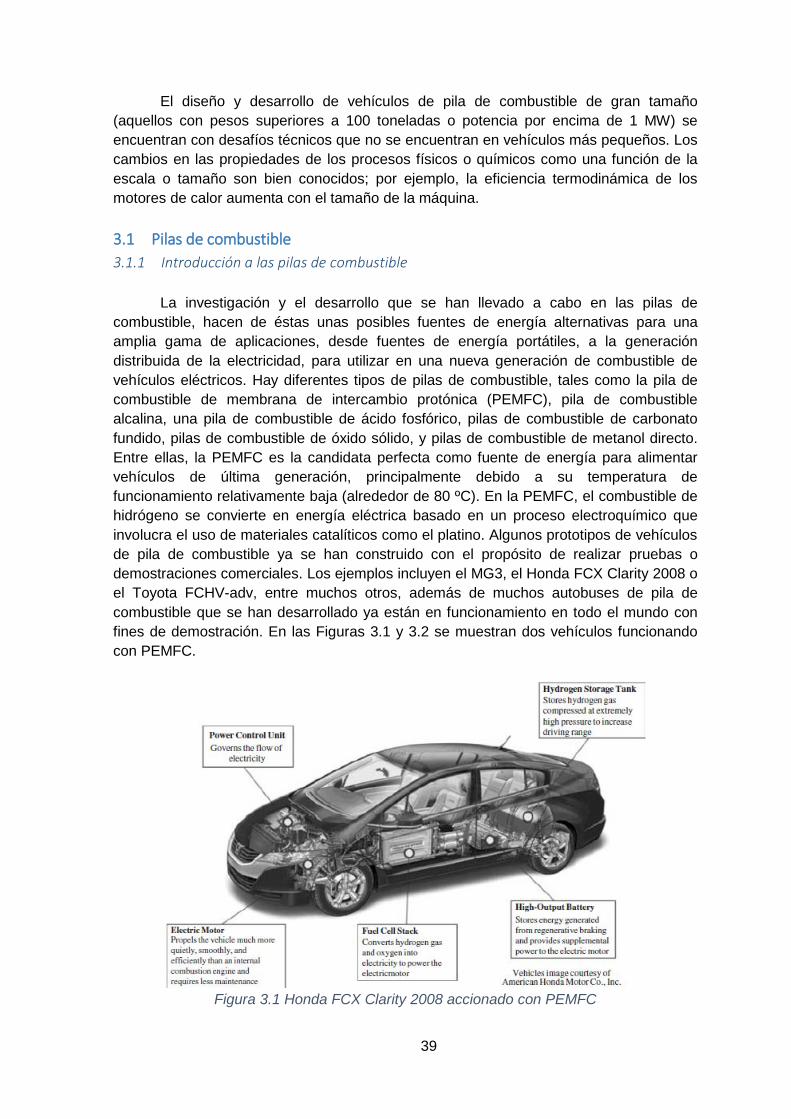
39
El diseño y desarrollo de vehículos de pila de combustible de gran tamaño (aquellos con pesos superiores a 100 toneladas o potencia por encima de 1 MW) se encuentran con desafíos técnicos que no se encuentran en vehículos más pequeños. Los cambios en las propiedades de los procesos físicos o químicos como una función de la escala o tamaño son bien conocidos; por ejemplo, la eficiencia termodinámica de los motores de calor aumenta con el tamaño de la máquina. 3.1 Pilas de combustible 3.1.1 Introducción a las pilas de combustible
La investigación y el desarrollo que se han llevado a cabo en las pilas de combustible, hacen de éstas unas posibles fuentes de energía alternativas para una amplia gama de aplicaciones, desde fuentes de energía portátiles, a la generación distribuida de la electricidad, para utilizar en una nueva generación de combustible de vehículos eléctricos. Hay diferentes tipos de pilas de combustible, tales como la pila de combustible de membrana de intercambio protónica (PEMFC), pila de combustible alcalina, una pila de combustible de ácido fosfórico, pilas de combustible de carbonato fundido, pilas de combustible de óxido sólido, y pilas de combustible de metanol directo. Entre ellas, la PEMFC es la candidata perfecta como fuente de energía para alimentar vehículos de última generación, principalmente debido a su temperatura de funcionamiento relativamente baja (alrededor de 80 ºC). En la PEMFC, el combustible de hidrógeno se convierte en energía eléctrica basado en un proceso electroquímico que involucra el uso de materiales catalíticos como el platino. Algunos prototipos de vehículos de pila de combustible ya se han construido con el propósito de realizar pruebas o demostraciones comerciales. Los ejemplos incluyen el MG3, el Honda FCX Clarity 2008 o el Toyota FCHV-adv, entre muchos otros, además de muchos autobuses de pila de combustible que se han desarrollado ya están en funcionamiento en todo el mundo con fines de demostración. En las Figuras 3.1 y 3.2 se muestran dos vehículos funcionando con PEMFC.
Figura 3.1 Honda FCX Clarity 2008 accionado con PEMFC
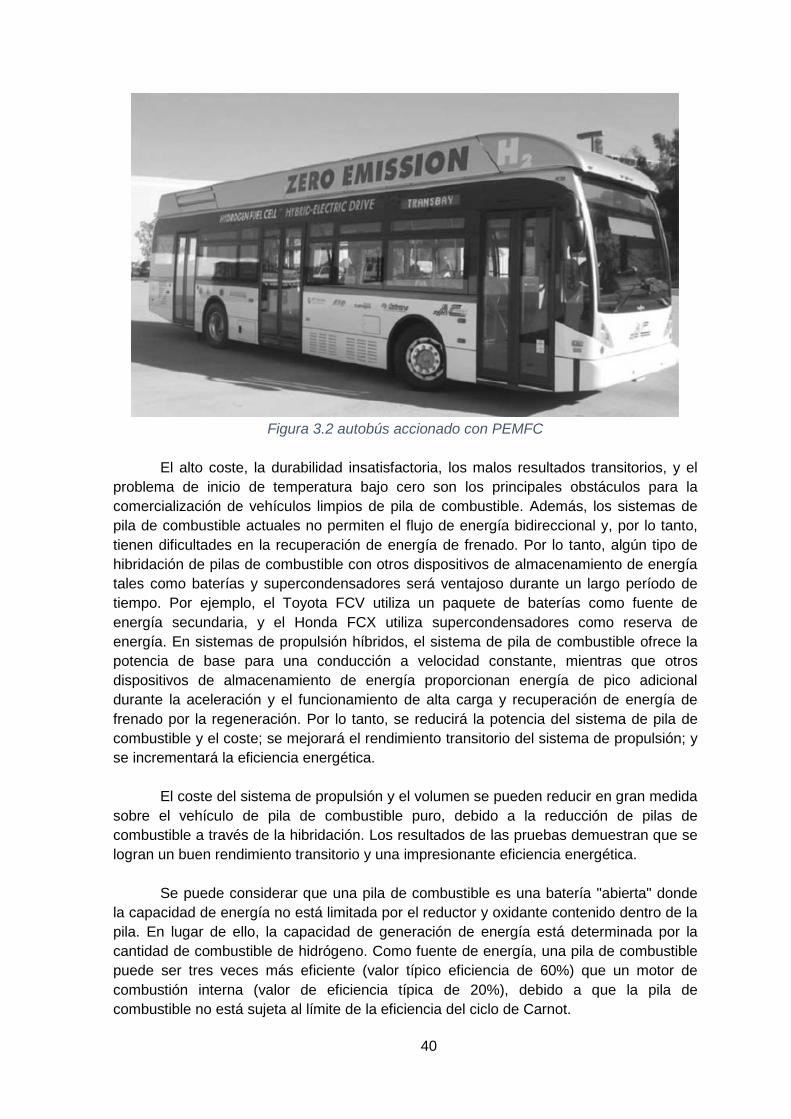
40
Figura 3.2 autobús accionado con PEMFC
El alto coste, la durabilidad insatisfactoria, los malos resultados transitorios, y el
problema de inicio de temperatura bajo cero son los principales obstáculos para la comercialización de vehículos limpios de pila de combustible. Además, los sistemas de pila de combustible actuales no permiten el flujo de energía bidireccional y, por lo tanto, tienen dificultades en la recuperación de energía de frenado. Por lo tanto, algún tipo de hibridación de pilas de combustible con otros dispositivos de almacenamiento de energía tales como baterías y supercondensadores será ventajoso durante un largo período de tiempo. Por ejemplo, el Toyota FCV utiliza un paquete de baterías como fuente de energía secundaria, y el Honda FCX utiliza supercondensadores como reserva de energía. En sistemas de propulsión híbridos, el sistema de pila de combustible ofrece la potencia de base para una conducción a velocidad constante, mientras que otros dispositivos de almacenamiento de energía proporcionan energía de pico adicional durante la aceleración y el funcionamiento de alta carga y recuperación de energía de frenado por la regeneración. Por lo tanto, se reducirá la potencia del sistema de pila de combustible y el coste; se mejorará el rendimiento transitorio del sistema de propulsión; y se incrementará la eficiencia energética.
El coste del sistema de propulsión y el volumen se pueden reducir en gran medida sobre el vehículo de pila de combustible puro, debido a la reducción de pilas de combustible a través de la hibridación. Los resultados de las pruebas demuestran que se logran un buen rendimiento transitorio y una impresionante eficiencia energética.
Se puede considerar que una pila de combustible es una batería "abierta" donde
la capacidad de energía no está limitada por el reductor y oxidante contenido dentro de la pila. En lugar de ello, la capacidad de generación de energía está determinada por la cantidad de combustible de hidrógeno. Como fuente de energía, una pila de combustible puede ser tres veces más eficiente (valor típico eficiencia de 60%) que un motor de combustión interna (valor de eficiencia típica de 20%), debido a que la pila de combustible no está sujeta al límite de la eficiencia del ciclo de Carnot.
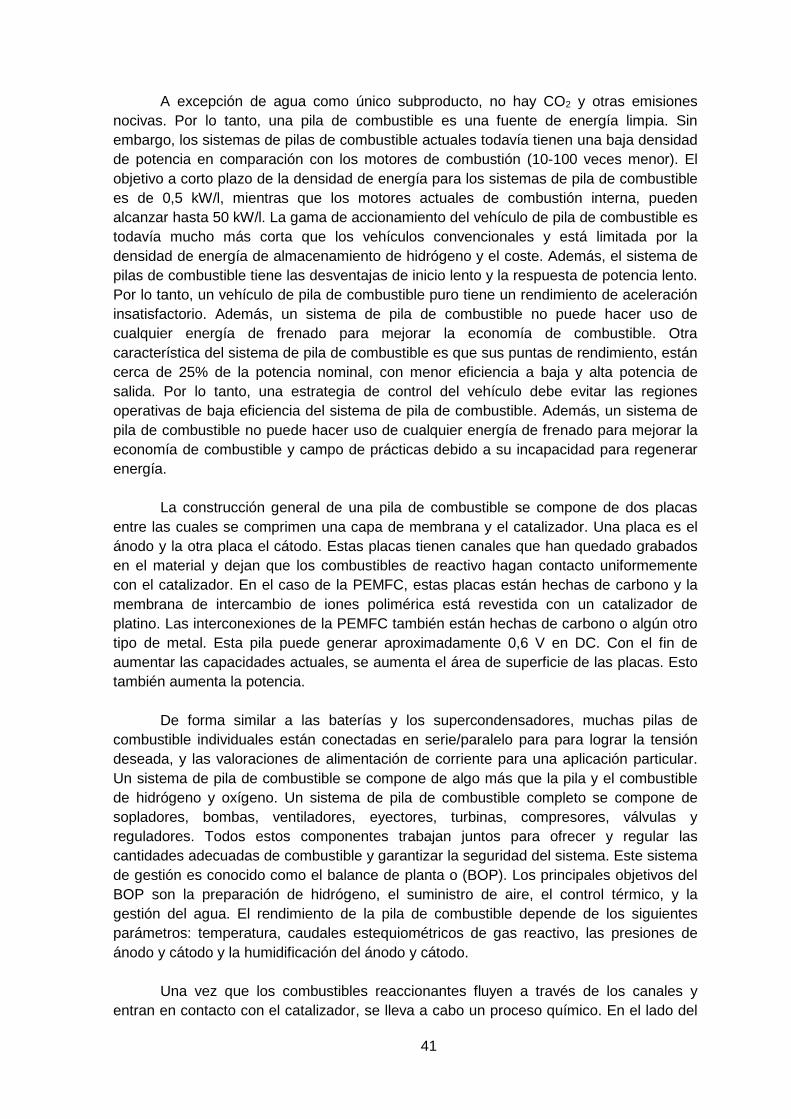
41
A excepción de agua como único subproducto, no hay CO2 y otras emisiones nocivas. Por lo tanto, una pila de combustible es una fuente de energía limpia. Sin embargo, los sistemas de pilas de combustible actuales todavía tienen una baja densidad de potencia en comparación con los motores de combustión (10-100 veces menor). El objetivo a corto plazo de la densidad de energía para los sistemas de pila de combustible es de 0,5 kW/l, mientras que los motores actuales de combustión interna, pueden alcanzar hasta 50 kW/l. La gama de accionamiento del vehículo de pila de combustible es todavía mucho más corta que los vehículos convencionales y está limitada por la densidad de energía de almacenamiento de hidrógeno y el coste. Además, el sistema de pilas de combustible tiene las desventajas de inicio lento y la respuesta de potencia lento. Por lo tanto, un vehículo de pila de combustible puro tiene un rendimiento de aceleración insatisfactorio. Además, un sistema de pila de combustible no puede hacer uso de cualquier energía de frenado para mejorar la economía de combustible. Otra característica del sistema de pila de combustible es que sus puntas de rendimiento, están cerca de 25% de la potencia nominal, con menor eficiencia a baja y alta potencia de salida. Por lo tanto, una estrategia de control del vehículo debe evitar las regiones operativas de baja eficiencia del sistema de pila de combustible. Además, un sistema de pila de combustible no puede hacer uso de cualquier energía de frenado para mejorar la economía de combustible y campo de prácticas debido a su incapacidad para regenerar energía.
La construcción general de una pila de combustible se compone de dos placas entre las cuales se comprimen una capa de membrana y el catalizador. Una placa es el ánodo y la otra placa el cátodo. Estas placas tienen canales que han quedado grabados en el material y dejan que los combustibles de reactivo hagan contacto uniformemente con el catalizador. En el caso de la PEMFC, estas placas están hechas de carbono y la membrana de intercambio de iones polimérica está revestida con un catalizador de platino. Las interconexiones de la PEMFC también están hechas de carbono o algún otro tipo de metal. Esta pila puede generar aproximadamente 0,6 V en DC. Con el fin de aumentar las capacidades actuales, se aumenta el área de superficie de las placas. Esto también aumenta la potencia.
De forma similar a las baterías y los supercondensadores, muchas pilas de combustible individuales están conectadas en serie/paralelo para para lograr la tensión deseada, y las valoraciones de alimentación de corriente para una aplicación particular. Un sistema de pila de combustible se compone de algo más que la pila y el combustible de hidrógeno y oxígeno. Un sistema de pila de combustible completo se compone de sopladores, bombas, ventiladores, eyectores, turbinas, compresores, válvulas y reguladores. Todos estos componentes trabajan juntos para ofrecer y regular las cantidades adecuadas de combustible y garantizar la seguridad del sistema. Este sistema de gestión es conocido como el balance de planta o (BOP). Los principales objetivos del BOP son la preparación de hidrógeno, el suministro de aire, el control térmico, y la gestión del agua. El rendimiento de la pila de combustible depende de los siguientes parámetros: temperatura, caudales estequiométricos de gas reactivo, las presiones de ánodo y cátodo y la humidificación del ánodo y cátodo.
Una vez que los combustibles reaccionantes fluyen a través de los canales y
entran en contacto con el catalizador, se lleva a cabo un proceso químico. En el lado del
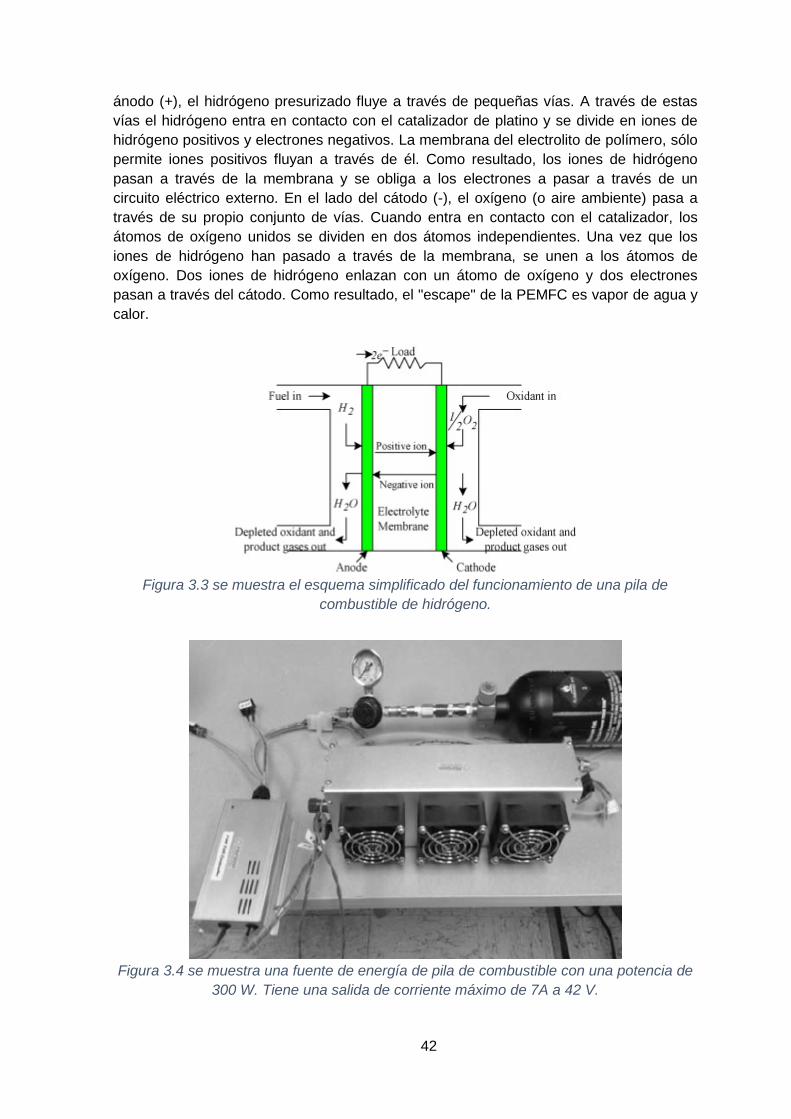
42
ánodo (+), el hidrógeno presurizado fluye a través de pequeñas vías. A través de estas vías el hidrógeno entra en contacto con el catalizador de platino y se divide en iones de hidrógeno positivos y electrones negativos. La membrana del electrolito de polímero, sólo permite iones positivos fluyan a través de él. Como resultado, los iones de hidrógeno pasan a través de la membrana y se obliga a los electrones a pasar a través de un circuito eléctrico externo. En el lado del cátodo (-), el oxígeno (o aire ambiente) pasa a través de su propio conjunto de vías. Cuando entra en contacto con el catalizador, los átomos de oxígeno unidos se dividen en dos átomos independientes. Una vez que los iones de hidrógeno han pasado a través de la membrana, se unen a los átomos de oxígeno. Dos iones de hidrógeno enlazan con un átomo de oxígeno y dos electrones pasan a través del cátodo. Como resultado, el "escape" de la PEMFC es vapor de agua y calor.
Figura 3.3 se muestra el esquema simplificado del funcionamiento de una pila de
combustible de hidrógeno.
Figura 3.4 se muestra una fuente de energía de pila de combustible con una potencia de
300 W. Tiene una salida de corriente máximo de 7A a 42 V.
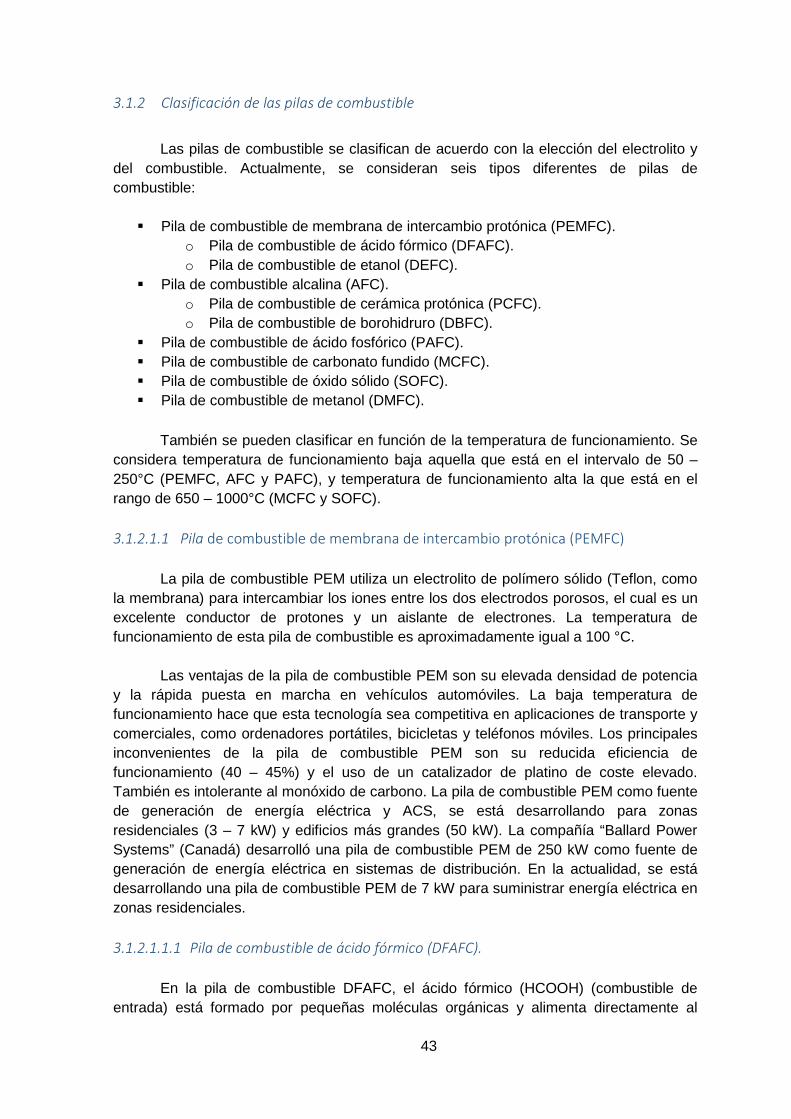
43
3.1.2 Clasificación de las pilas de combustible
Las pilas de combustible se clasifican de acuerdo con la elección del electrolito y del combustible. Actualmente, se consideran seis tipos diferentes de pilas de combustible: Pila de combustible de membrana de intercambio protónica (PEMFC).
o Pila de combustible de ácido fórmico (DFAFC). o Pila de combustible de etanol (DEFC).
Pila de combustible alcalina (AFC). o Pila de combustible de cerámica protónica (PCFC). o Pila de combustible de borohidruro (DBFC).
Pila de combustible de ácido fosfórico (PAFC). Pila de combustible de carbonato fundido (MCFC). Pila de combustible de óxido sólido (SOFC). Pila de combustible de metanol (DMFC).
También se pueden clasificar en función de la temperatura de funcionamiento. Se
considera temperatura de funcionamiento baja aquella que está en el intervalo de 50 – 250°C (PEMFC, AFC y PAFC), y temperatura de funcionamiento alta la que está en el rango de 650 – 1000°C (MCFC y SOFC).
3.1.2.1.1 Pila de combustible de membrana de intercambio protónica (PEMFC)
La pila de combustible PEM utiliza un electrolito de polímero sólido (Teflon, como la membrana) para intercambiar los iones entre los dos electrodos porosos, el cual es un excelente conductor de protones y un aislante de electrones. La temperatura de funcionamiento de esta pila de combustible es aproximadamente igual a 100 °C.
Las ventajas de la pila de combustible PEM son su elevada densidad de potencia y la rápida puesta en marcha en vehículos automóviles. La baja temperatura de funcionamiento hace que esta tecnología sea competitiva en aplicaciones de transporte y comerciales, como ordenadores portátiles, bicicletas y teléfonos móviles. Los principales inconvenientes de la pila de combustible PEM son su reducida eficiencia de funcionamiento (40 – 45%) y el uso de un catalizador de platino de coste elevado. También es intolerante al monóxido de carbono. La pila de combustible PEM como fuente de generación de energía eléctrica y ACS, se está desarrollando para zonas residenciales (3 – 7 kW) y edificios más grandes (50 kW). La compañía “Ballard Power Systems” (Canadá) desarrolló una pila de combustible PEM de 250 kW como fuente de generación de energía eléctrica en sistemas de distribución. En la actualidad, se está desarrollando una pila de combustible PEM de 7 kW para suministrar energía eléctrica en zonas residenciales. 3.1.2.1.1.1 Pila de combustible de ácido fórmico (DFAFC).
En la pila de combustible DFAFC, el ácido fórmico (HCOOH) (combustible de entrada) está formado por pequeñas moléculas orgánicas y alimenta directamente al
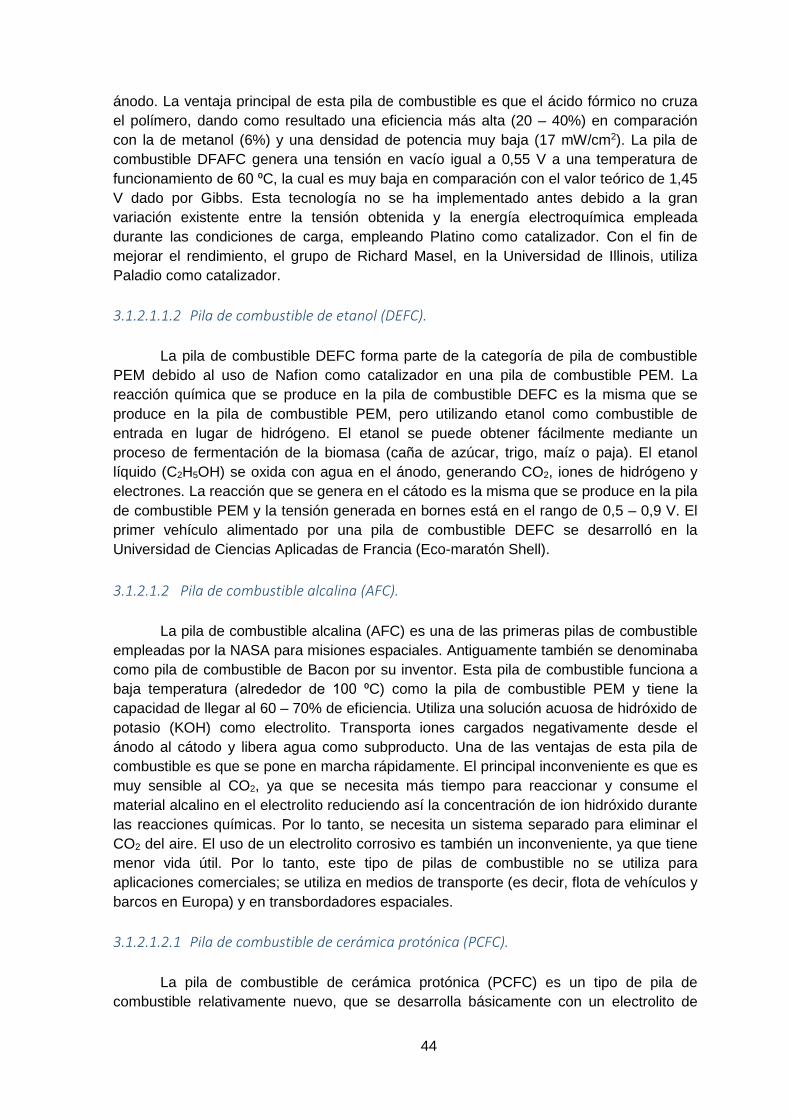
44
ánodo. La ventaja principal de esta pila de combustible es que el ácido fórmico no cruza el polímero, dando como resultado una eficiencia más alta (20 – 40%) en comparación con la de metanol (6%) y una densidad de potencia muy baja (17 mW/cm2). La pila de combustible DFAFC genera una tensión en vacío igual a 0,55 V a una temperatura de funcionamiento de 60 ⁰C, la cual es muy baja en comparación con el valor teórico de 1,45 V dado por Gibbs. Esta tecnología no se ha implementado antes debido a la gran variación existente entre la tensión obtenida y la energía electroquímica empleada durante las condiciones de carga, empleando Platino como catalizador. Con el fin de mejorar el rendimiento, el grupo de Richard Masel, en la Universidad de Illinois, utiliza Paladio como catalizador.
3.1.2.1.1.2 Pila de combustible de etanol (DEFC).
La pila de combustible DEFC forma parte de la categoría de pila de combustible PEM debido al uso de Nafion como catalizador en una pila de combustible PEM. La reacción química que se produce en la pila de combustible DEFC es la misma que se produce en la pila de combustible PEM, pero utilizando etanol como combustible de entrada en lugar de hidrógeno. El etanol se puede obtener fácilmente mediante un proceso de fermentación de la biomasa (caña de azúcar, trigo, maíz o paja). El etanol líquido (C2H5OH) se oxida con agua en el ánodo, generando CO2, iones de hidrógeno y electrones. La reacción que se genera en el cátodo es la misma que se produce en la pila de combustible PEM y la tensión generada en bornes está en el rango de 0,5 – 0,9 V. El primer vehículo alimentado por una pila de combustible DEFC se desarrolló en la Universidad de Ciencias Aplicadas de Francia (Eco-maratón Shell). 3.1.2.1.2 Pila de combustible alcalina (AFC).
La pila de combustible alcalina (AFC) es una de las primeras pilas de combustible empleadas por la NASA para misiones espaciales. Antiguamente también se denominaba como pila de combustible de Bacon por su inventor. Esta pila de combustible funciona a baja temperatura (alrededor de 100 ⁰C) como la pila de combustible PEM y tiene la capacidad de llegar al 60 – 70% de eficiencia. Utiliza una solución acuosa de hidróxido de potasio (KOH) como electrolito. Transporta iones cargados negativamente desde el ánodo al cátodo y libera agua como subproducto. Una de las ventajas de esta pila de combustible es que se pone en marcha rápidamente. El principal inconveniente es que es muy sensible al CO2, ya que se necesita más tiempo para reaccionar y consume el material alcalino en el electrolito reduciendo así la concentración de ion hidróxido durante las reacciones químicas. Por lo tanto, se necesita un sistema separado para eliminar el CO2 del aire. El uso de un electrolito corrosivo es también un inconveniente, ya que tiene menor vida útil. Por lo tanto, este tipo de pilas de combustible no se utiliza para aplicaciones comerciales; se utiliza en medios de transporte (es decir, flota de vehículos y barcos en Europa) y en transbordadores espaciales. 3.1.2.1.2.1 Pila de combustible de cerámica protónica (PCFC).
La pila de combustible de cerámica protónica (PCFC) es un tipo de pila de combustible relativamente nuevo, que se desarrolla básicamente con un electrolito de
45
material cerámico. Puede funcionar a temperaturas superiores a 750 ⁰C y oxidar electroquímicamente moléculas gaseosas de los hidrocarburos suministrados directamente al ánodo sin la necesidad de un reformador adicional. Además, tiene un electrolito sólido, por lo que la membrana no se puede secar como en las pilas de combustible PEMFC o el líquido no puede salirse, como en las pilas de combustible PAFC. La tensión en vacío generada por la pila de combustible PCFC está muy próxima al valor teórico. El inconveniente principal de este tipo de pila de combustible es que su densidad de corriente reducida puede aumentar reduciendo el espesor de electrolito, mejorando la conductividad u optimizando los electrodos. La investigación se centra en aumentar la eficiencia eléctrica en el intervalo de 55 – 65% mediante tuberías de gas natural y aumentar la concentración de ácido fórmico. 3.1.2.1.2.2 Pila de combustible de borohidruro (DBFC).
El borohidruro de sodio (NaBH4) se utiliza como combustible mezclado con agua para generar hidrógeno mediante la descomposición en NaBO2 y 4H2. Después de liberar el hidrógeno, se oxida en el cátodo para producir NaBO2. La pila de combustible DBFC funciona a una temperatura de 70 °C. Las principales ventajas son una densidad de energía elevada, no necesita un catalizador de platino y su tensión en vacío es elevada (aproximadamente 1,64 V). Sin embargo, la eficacia de la DBFC es reducida (en torno al 35%). Por lo tanto, la investigación se ha centrado en el desarrollo de una mayor eficiencia con el objetivo de minimizar la reacción de hidrólisis mediante el uso de borohidruro de diferentes catalizadores como Au, Ni o Pd en lugar de platino. El coste del borohidruro de sodio es demasiado elevado para aplicaciones portátiles de suministro de energía eléctrica. Para esto, las investigaciones se han enfocado en el reciclaje del NaBO2 mediante una reacción electroquímica que cuantifique el contenido de borohidruro de sodio en solución acuosa y por algún otro método de retrovaloración de yodato para reducir su coste. Esta tecnología está todavía en etapa de desarrollo en comparación con otras pilas de combustible. 3.1.2.1.3 Pila de combustible de ácido fosfórico (PAFC).
La pila de combustible de ácido fosfórico funciona aproximadamente a 175–200 °C. Esta temperatura de funcionamiento es casi el doble a la de la pila de combustible PEM. Esta pila de combustible utiliza ácido fosfórico líquido como electrodo. A diferencia de las pilas de combustible PEM y AFC, es muy tolerante a las impurezas existentes en los combustibles de hidrocarburos reformados. La reacción química que se desarrolla en esta pila de combustible es la misma que la que se obtiene en la pila de combustible PEM, donde se utiliza hidrógeno puro como entrada de combustible. Es posible un proceso de cogeneración debido a su alta temperatura de funcionamiento y el potencial es adecuado para suministrar agua caliente, así como energía eléctrica, dependiendo de las características térmicas y eléctricas de la demanda. El principal inconveniente de la pila de combustible PAFC es el mismo que el de la pila de combustible PEM, su coste elevado debido al uso de platino como catalizador. La pila de combustible PAFC se ha desarrollado para iniciar su primera etapa de comercialización. Las centrales de 100, 200 y 500 kW se emplean para suministro de energía eléctrica de forma estacionaria y energía térmica.
46
3.1.2.1.4 Pila de combustible de carbonato fundido (MCFC).
La pila de combustible de carbonato fundido funciona a temperatura elevada (en torno a 600–700 °C). Está compuesta por dos electrodos porosos con buena conductividad que están en contacto con una celda de carbonato fundido. Debido a su capacidad de reformado interno, puede separar el hidrógeno del monóxido de carbono y el hidrógeno descompuesto se utiliza en una reacción de desplazamiento agua para producir hidrógeno de nuevo; el resultado de la reacción es el mismo que el obtenido en la pila de combustible PEM para producir energía eléctrica.
Las principales ventajas de la pila de combustible MCFC son su elevada eficiencia (en torno al 50–60%), no necesita un catalizador metálico y un reformador separado debido a su alta temperatura de funcionamiento. Los principales inconvenientes de esta pila de combustible es que es intolerante al azufre y su puesta en marcha es lenta. Se emplea principalmente para generar energía eléctrica en media y gran potencia. En Kawagoe existe una central de 1 MW y en Santa Clara (California) se está probando una central de 2 MW. 3.1.2.1.5 Pila de combustible de óxido sólido (SOFC).
Las pilas de combustible de óxido sólido, SOFC, funcionan a una temperatura elevada. Estas pilas de combustible emplean como electrolito un material cerámico sólido, Zirconio estabilizado con Itrio. En su proceso eletroquímico, los iones de Oxígeno (O2-) se combinan con los de Hidrógeno (H+) para generar agua y energía térmica. La pila de combustible SOFC genera energía eléctrica a una temperatura de funcionamiento elevada (aproximadamente 1000 °C). Las principales ventajas de la pila de combustible SOFC son su elevada eficiencia (en torno al 50–60%) y no necesitan un reformador independiente para obtener Hidrógeno del combustible debido a su capacidad interna de reformado. El calor residual se puede utilizar para producir energía eléctrica adicional empleando sistemas de cogeneración. Algunos de sus inconvenientes son su puesta en marcha lenta, su elevado coste y su intolerancia a contenidos sulfúricos. No es adecuada si existen para grandes variaciones de demanda. Por lo tanto, esta pila de combustible se utiliza principalmente para generar energía eléctrica a media y gran potencia. En 1997, la “Ceramic Fuel Cells Limited Company” construyó un prototipo de pila de combustible SOFC de 5 kW. Yakabe desarrolló una pila de combustible SOFC de 3 kW en la “Tokyo Gas Co. Ltd.” y también analizaron las características principales para mejorar el rendimiento de la pila de combustible SOFC en las micro-redes de generación de energía eléctrica. En la actualidad la investigación se centra en la construcción de un modelo de pila SOFC comercial de 250 kW. 3.1.2.1.6 Pila de combustible de metanol (DMFC).
La tecnología de la pila de combustible DMFC es relativamente nueva en comparación con el resto de pilas de combustible. Al igual que la pila de combustible PEM, la pila de combustible DMFC utiliza un electrolito polimérico. Sin embargo, la pila de combustible DMFC utiliza metanol líquido o alcohol como combustible en lugar de combustible reformado de hidrógeno. Durante las reacciones químicas, el ánodo extrae el
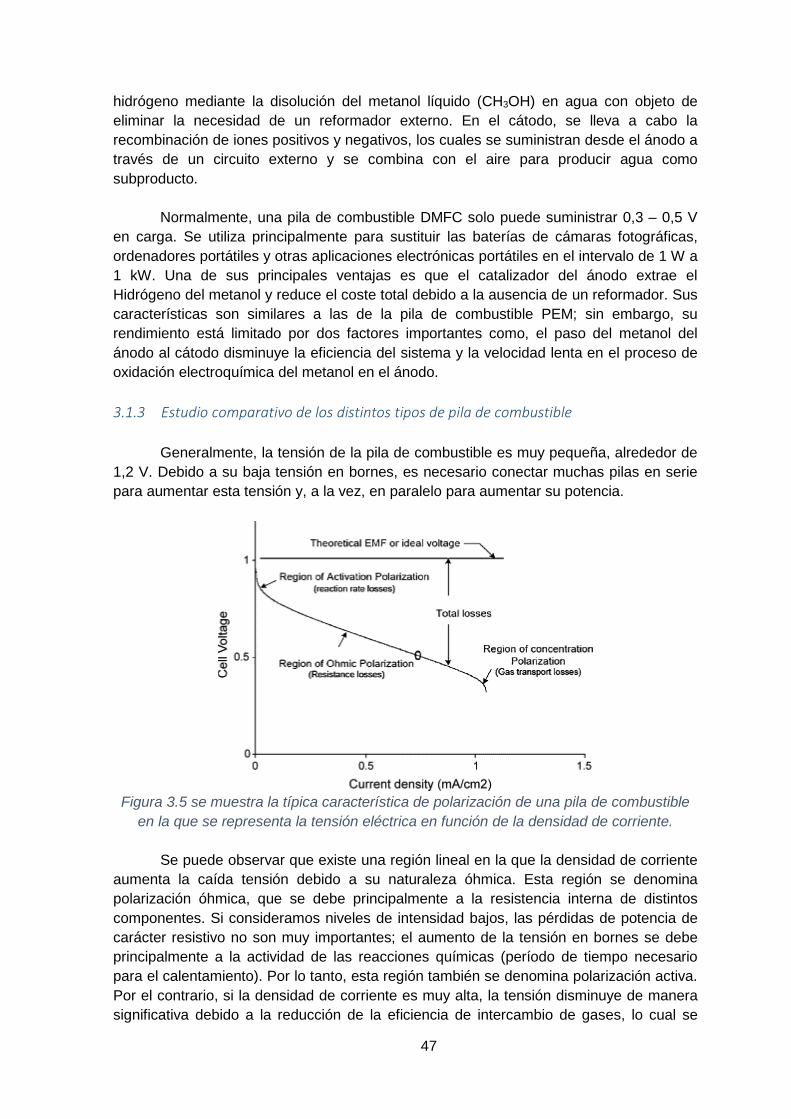
47
hidrógeno mediante la disolución del metanol líquido (CH3OH) en agua con objeto de eliminar la necesidad de un reformador externo. En el cátodo, se lleva a cabo la recombinación de iones positivos y negativos, los cuales se suministran desde el ánodo a través de un circuito externo y se combina con el aire para producir agua como subproducto.
Normalmente, una pila de combustible DMFC solo puede suministrar 0,3 – 0,5 V en carga. Se utiliza principalmente para sustituir las baterías de cámaras fotográficas, ordenadores portátiles y otras aplicaciones electrónicas portátiles en el intervalo de 1 W a 1 kW. Una de sus principales ventajas es que el catalizador del ánodo extrae el Hidrógeno del metanol y reduce el coste total debido a la ausencia de un reformador. Sus características son similares a las de la pila de combustible PEM; sin embargo, su rendimiento está limitado por dos factores importantes como, el paso del metanol del ánodo al cátodo disminuye la eficiencia del sistema y la velocidad lenta en el proceso de oxidación electroquímica del metanol en el ánodo. 3.1.3 Estudio comparativo de los distintos tipos de pila de combustible
Generalmente, la tensión de la pila de combustible es muy pequeña, alrededor de 1,2 V. Debido a su baja tensión en bornes, es necesario conectar muchas pilas en serie para aumentar esta tensión y, a la vez, en paralelo para aumentar su potencia.
Figura 3.5 se muestra la típica característica de polarización de una pila de combustible
en la que se representa la tensión eléctrica en función de la densidad de corriente.
Se puede observar que existe una región lineal en la que la densidad de corriente aumenta la caída tensión debido a su naturaleza óhmica. Esta región se denomina polarización óhmica, que se debe principalmente a la resistencia interna de distintos componentes. Si consideramos niveles de intensidad bajos, las pérdidas de potencia de carácter resistivo no son muy importantes; el aumento de la tensión en bornes se debe principalmente a la actividad de las reacciones químicas (período de tiempo necesario para el calentamiento). Por lo tanto, esta región también se denomina polarización activa. Por el contrario, si la densidad de corriente es muy alta, la tensión disminuye de manera significativa debido a la reducción de la eficiencia de intercambio de gases, lo cual se
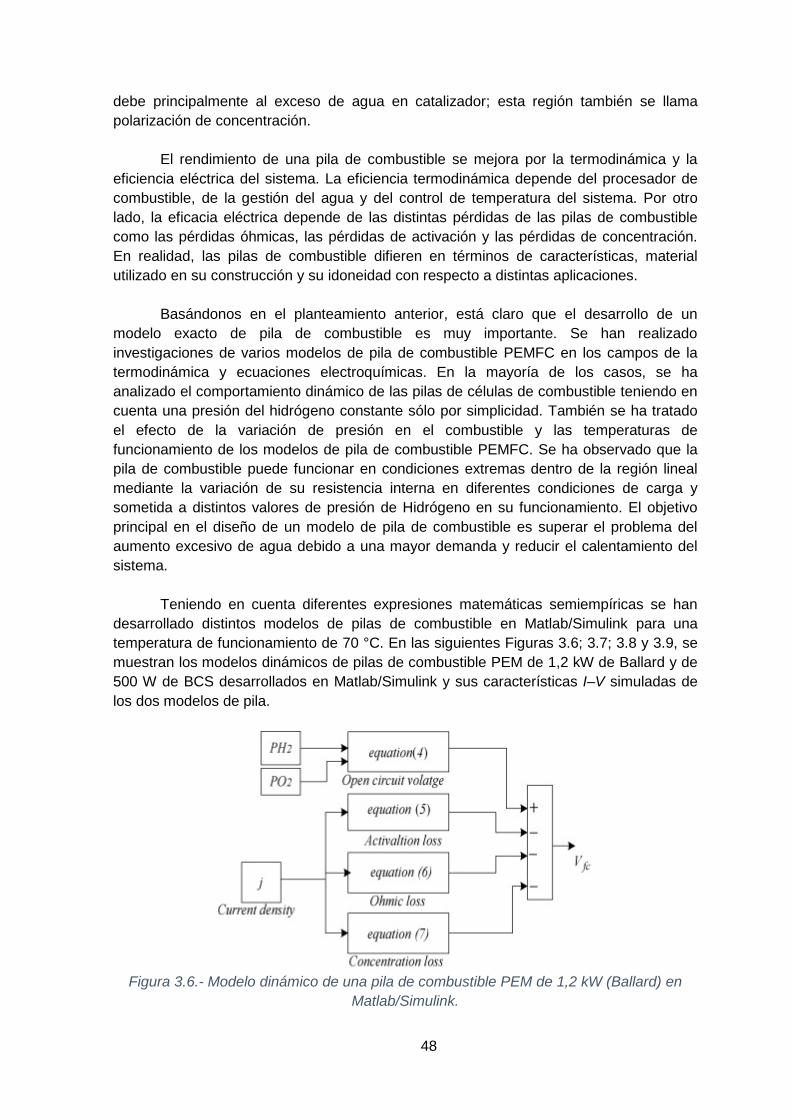
48
debe principalmente al exceso de agua en catalizador; esta región también se llama polarización de concentración.
El rendimiento de una pila de combustible se mejora por la termodinámica y la eficiencia eléctrica del sistema. La eficiencia termodinámica depende del procesador de combustible, de la gestión del agua y del control de temperatura del sistema. Por otro lado, la eficacia eléctrica depende de las distintas pérdidas de las pilas de combustible como las pérdidas óhmicas, las pérdidas de activación y las pérdidas de concentración. En realidad, las pilas de combustible difieren en términos de características, material utilizado en su construcción y su idoneidad con respecto a distintas aplicaciones.
Basándonos en el planteamiento anterior, está claro que el desarrollo de un modelo exacto de pila de combustible es muy importante. Se han realizado investigaciones de varios modelos de pila de combustible PEMFC en los campos de la termodinámica y ecuaciones electroquímicas. En la mayoría de los casos, se ha analizado el comportamiento dinámico de las pilas de células de combustible teniendo en cuenta una presión del hidrógeno constante sólo por simplicidad. También se ha tratado el efecto de la variación de presión en el combustible y las temperaturas de funcionamiento de los modelos de pila de combustible PEMFC. Se ha observado que la pila de combustible puede funcionar en condiciones extremas dentro de la región lineal mediante la variación de su resistencia interna en diferentes condiciones de carga y sometida a distintos valores de presión de Hidrógeno en su funcionamiento. El objetivo principal en el diseño de un modelo de pila de combustible es superar el problema del aumento excesivo de agua debido a una mayor demanda y reducir el calentamiento del sistema.
Teniendo en cuenta diferentes expresiones matemáticas semiempíricas se han desarrollado distintos modelos de pilas de combustible en Matlab/Simulink para una temperatura de funcionamiento de 70 °C. En las siguientes Figuras 3.6; 3.7; 3.8 y 3.9, se muestran los modelos dinámicos de pilas de combustible PEM de 1,2 kW de Ballard y de 500 W de BCS desarrollados en Matlab/Simulink y sus características I–V simuladas de los dos modelos de pila.
Figura 3.6.- Modelo dinámico de una pila de combustible PEM de 1,2 kW (Ballard) en
Matlab/Simulink.
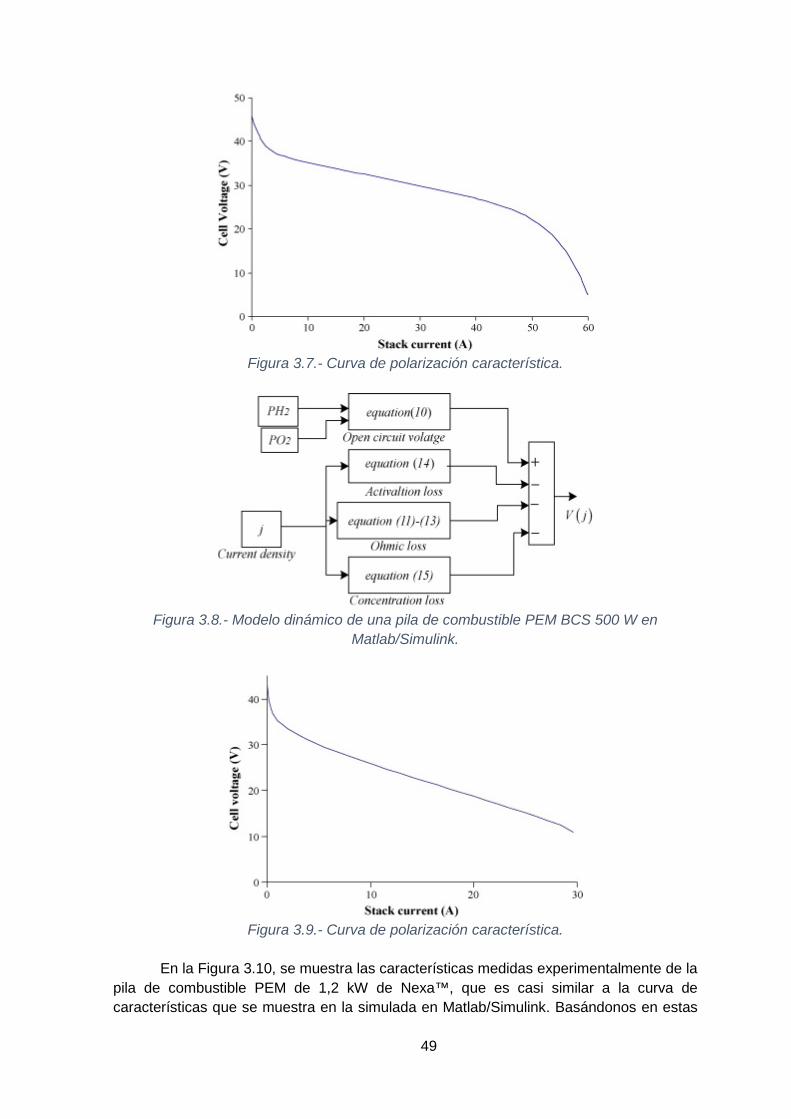
49
Figura 3.7.- Curva de polarización característica.
Figura 3.8.- Modelo dinámico de una pila de combustible PEM BCS 500 W en
Matlab/Simulink.
Figura 3.9.- Curva de polarización característica.
En la Figura 3.10, se muestra las características medidas experimentalmente de la
pila de combustible PEM de 1,2 kW de Nexa™, que es casi similar a la curva de características que se muestra en la simulada en Matlab/Simulink. Basándonos en estas
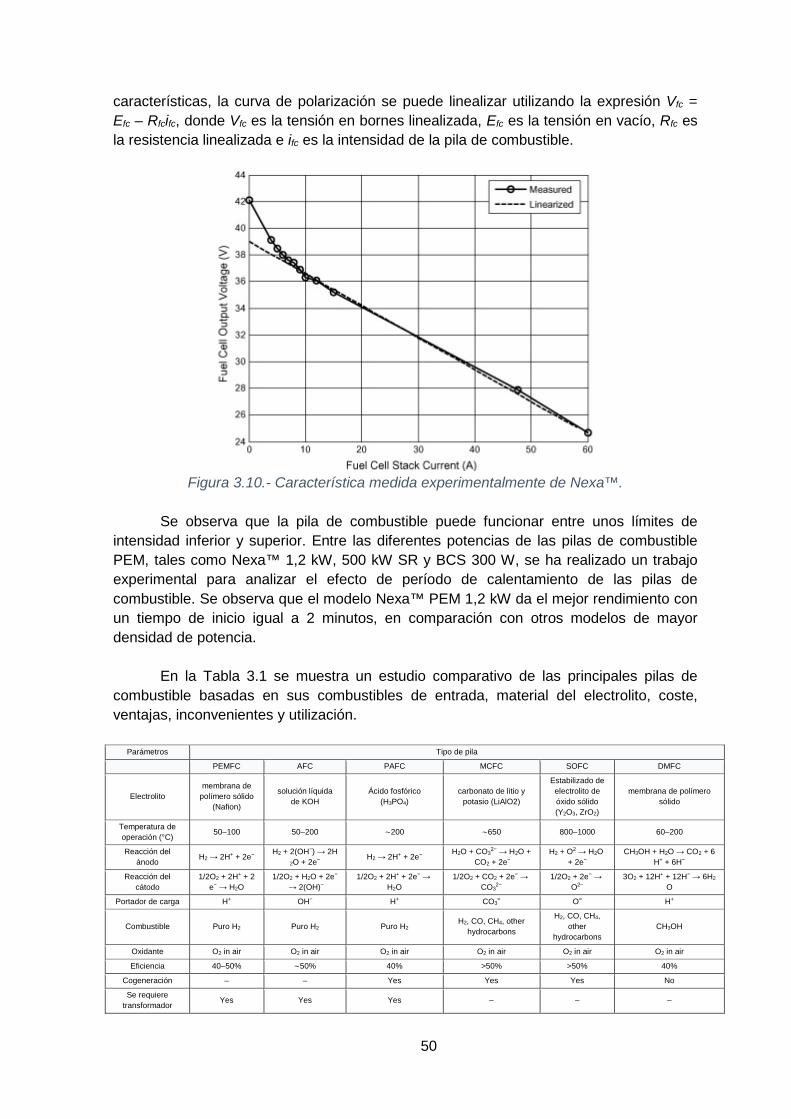
50
características, la curva de polarización se puede linealizar utilizando la expresión Vfc = Efc – Rfcifc, donde Vfc es la tensión en bornes linealizada, Efc es la tensión en vacío, Rfc es la resistencia linealizada e ifc es la intensidad de la pila de combustible.
Figura 3.10.- Característica medida experimentalmente de Nexa™.
Se observa que la pila de combustible puede funcionar entre unos límites de
intensidad inferior y superior. Entre las diferentes potencias de las pilas de combustible PEM, tales como Nexa™ 1,2 kW, 500 kW SR y BCS 300 W, se ha realizado un trabajo experimental para analizar el efecto de período de calentamiento de las pilas de combustible. Se observa que el modelo Nexa™ PEM 1,2 kW da el mejor rendimiento con un tiempo de inicio igual a 2 minutos, en comparación con otros modelos de mayor densidad de potencia.
En la Tabla 3.1 se muestra un estudio comparativo de las principales pilas de combustible basadas en sus combustibles de entrada, material del electrolito, coste, ventajas, inconvenientes y utilización.
Parámetros Tipo de pila
PEMFC AFC PAFC MCFC SOFC DMFC
Electrolito membrana de
polímero sólido (Nafion)
solución líquida de KOH
Ácido fosfórico (H3PO4)
carbonato de litio y potasio (LiAlO2)
Estabilizado de electrolito de óxido sólido (Y2O3, ZrO2)
membrana de polímero sólido
Temperatura de operación (°C) 50–100 50–200 ∼200 ∼650 800–1000 60–200
Reacción del ánodo H2 → 2H+ + 2e− H2 + 2(OH−) → 2H
2O + 2e− H2 → 2H+ + 2e− H2O + CO32− → H2O +
CO2 + 2e− H2 + O2 → H2O
+ 2e− CH3OH + H2O → CO2 + 6
H+ + 6H−
Reacción del cátodo
1/2O2 + 2H+ + 2e− → H2O
1/2O2 + H2O + 2e−
→ 2(OH)− 1/2O2 + 2H+ + 2e− →
H2O 1/2O2 + CO2 + 2e− →
CO32−
1/2O2 + 2e− → O2−
3O2 + 12H+ + 12H− → 6H2
O
Portador de carga H+ OH− H+ CO3= O= H+
Combustible Puro H2 Puro H2 Puro H2 H2, CO, CH4, other
hydrocarbons
H2, CO, CH4, other
hydrocarbons CH3OH
Oxidante O2 in air O2 in air O2 in air O2 in air O2 in air O2 in air
Eficiencia 40–50% ∼50% 40% >50% >50% 40%
Cogeneración – – Yes Yes Yes No
Se requiere transformador Yes Yes Yes – – –
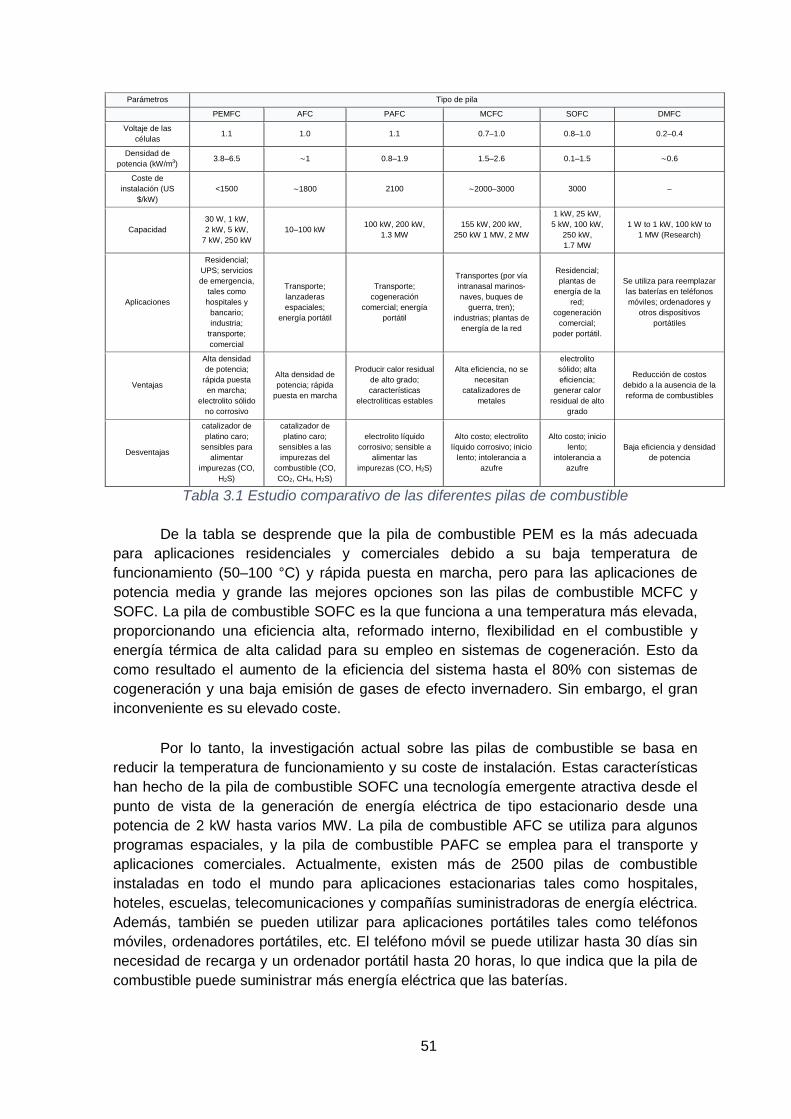
51
Parámetros Tipo de pila
PEMFC AFC PAFC MCFC SOFC DMFC
Voltaje de las células 1.1 1.0 1.1 0.7–1.0 0.8–1.0 0.2–0.4
Densidad de potencia (kW/m3) 3.8–6.5 ∼1 0.8–1.9 1.5–2.6 0.1–1.5 ∼0.6
Coste de instalación (US
$/kW) <1500 ∼1800 2100 ∼2000–3000 3000 –
Capacidad 30 W, 1 kW, 2 kW, 5 kW,
7 kW, 250 kW 10–100 kW 100 kW, 200 kW,
1.3 MW 155 kW, 200 kW,
250 kW 1 MW, 2 MW
1 kW, 25 kW, 5 kW, 100 kW,
250 kW, 1.7 MW
1 W to 1 kW, 100 kW to 1 MW (Research)
Aplicaciones
Residencial; UPS; servicios de emergencia,
tales como hospitales y
bancario; industria;
transporte; comercial
Transporte; lanzaderas espaciales;
energía portátil
Transporte; cogeneración
comercial; energía portátil
Transportes (por vía intranasal marinos-naves, buques de
guerra, tren); industrias; plantas de
energía de la red
Residencial; plantas de
energía de la red;
cogeneración comercial;
poder portátil.
Se utiliza para reemplazar las baterías en teléfonos móviles; ordenadores y
otros dispositivos portátiles
Ventajas
Alta densidad de potencia;
rápida puesta en marcha;
electrolito sólido no corrosivo
Alta densidad de potencia; rápida
puesta en marcha
Producir calor residual de alto grado; características
electrolíticas estables
Alta eficiencia, no se necesitan
catalizadores de metales
electrolito sólido; alta eficiencia;
generar calor residual de alto
grado
Reducción de costos debido a la ausencia de la reforma de combustibles
Desventajas
catalizador de platino caro;
sensibles para alimentar
impurezas (CO, H2S)
catalizador de platino caro;
sensibles a las impurezas del
combustible (CO, CO2, CH4, H2S)
electrolito líquido corrosivo; sensible a
alimentar las impurezas (CO, H2S)
Alto costo; electrolito líquido corrosivo; inicio
lento; intolerancia a azufre
Alto costo; inicio lento;
intolerancia a azufre
Baja eficiencia y densidad de potencia
Tabla 3.1 Estudio comparativo de las diferentes pilas de combustible De la tabla se desprende que la pila de combustible PEM es la más adecuada
para aplicaciones residenciales y comerciales debido a su baja temperatura de funcionamiento (50–100 °C) y rápida puesta en marcha, pero para las aplicaciones de potencia media y grande las mejores opciones son las pilas de combustible MCFC y SOFC. La pila de combustible SOFC es la que funciona a una temperatura más elevada, proporcionando una eficiencia alta, reformado interno, flexibilidad en el combustible y energía térmica de alta calidad para su empleo en sistemas de cogeneración. Esto da como resultado el aumento de la eficiencia del sistema hasta el 80% con sistemas de cogeneración y una baja emisión de gases de efecto invernadero. Sin embargo, el gran inconveniente es su elevado coste.
Por lo tanto, la investigación actual sobre las pilas de combustible se basa en reducir la temperatura de funcionamiento y su coste de instalación. Estas características han hecho de la pila de combustible SOFC una tecnología emergente atractiva desde el punto de vista de la generación de energía eléctrica de tipo estacionario desde una potencia de 2 kW hasta varios MW. La pila de combustible AFC se utiliza para algunos programas espaciales, y la pila de combustible PAFC se emplea para el transporte y aplicaciones comerciales. Actualmente, existen más de 2500 pilas de combustible instaladas en todo el mundo para aplicaciones estacionarias tales como hospitales, hoteles, escuelas, telecomunicaciones y compañías suministradoras de energía eléctrica. Además, también se pueden utilizar para aplicaciones portátiles tales como teléfonos móviles, ordenadores portátiles, etc. El teléfono móvil se puede utilizar hasta 30 días sin necesidad de recarga y un ordenador portátil hasta 20 horas, lo que indica que la pila de combustible puede suministrar más energía eléctrica que las baterías.
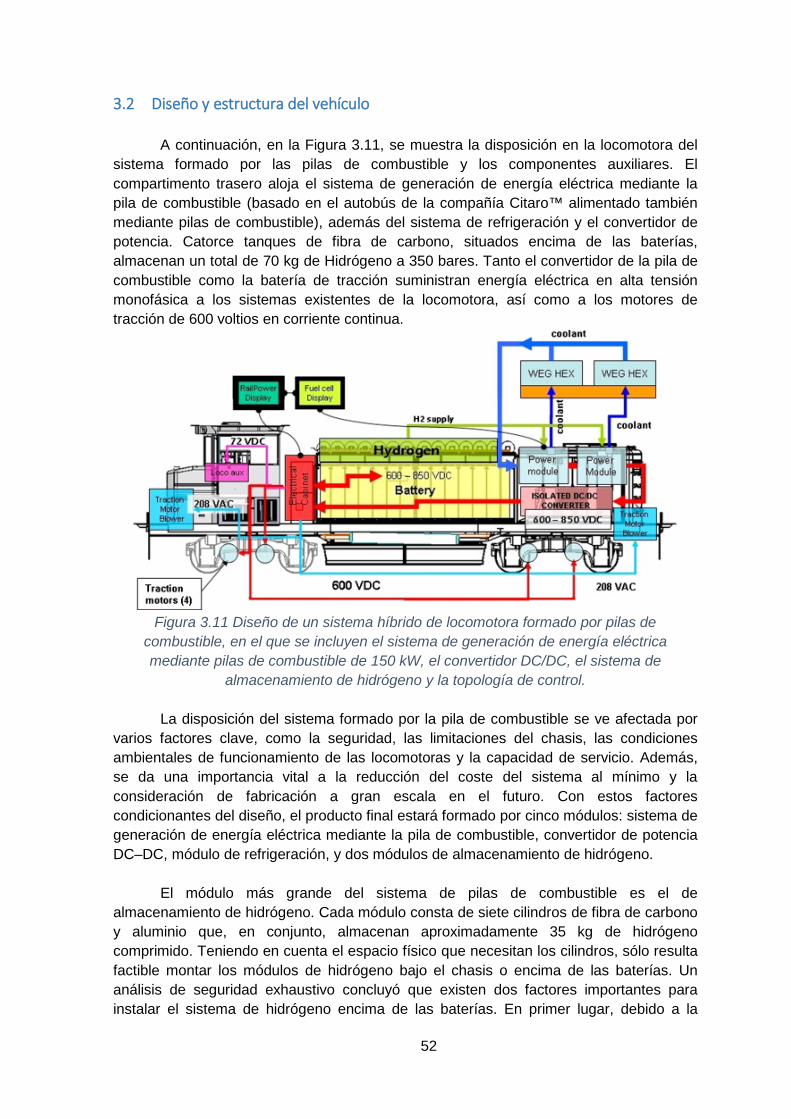
52
3.2 Diseño y estructura del vehículo
A continuación, en la Figura 3.11, se muestra la disposición en la locomotora del sistema formado por las pilas de combustible y los componentes auxiliares. El compartimento trasero aloja el sistema de generación de energía eléctrica mediante la pila de combustible (basado en el autobús de la compañía Citaro™ alimentado también mediante pilas de combustible), además del sistema de refrigeración y el convertidor de potencia. Catorce tanques de fibra de carbono, situados encima de las baterías, almacenan un total de 70 kg de Hidrógeno a 350 bares. Tanto el convertidor de la pila de combustible como la batería de tracción suministran energía eléctrica en alta tensión monofásica a los sistemas existentes de la locomotora, así como a los motores de tracción de 600 voltios en corriente continua.
Figura 3.11 Diseño de un sistema híbrido de locomotora formado por pilas de
combustible, en el que se incluyen el sistema de generación de energía eléctrica mediante pilas de combustible de 150 kW, el convertidor DC/DC, el sistema de
almacenamiento de hidrógeno y la topología de control.
La disposición del sistema formado por la pila de combustible se ve afectada por varios factores clave, como la seguridad, las limitaciones del chasis, las condiciones ambientales de funcionamiento de las locomotoras y la capacidad de servicio. Además, se da una importancia vital a la reducción del coste del sistema al mínimo y la consideración de fabricación a gran escala en el futuro. Con estos factores condicionantes del diseño, el producto final estará formado por cinco módulos: sistema de generación de energía eléctrica mediante la pila de combustible, convertidor de potencia DC–DC, módulo de refrigeración, y dos módulos de almacenamiento de hidrógeno.
El módulo más grande del sistema de pilas de combustible es el de almacenamiento de hidrógeno. Cada módulo consta de siete cilindros de fibra de carbono y aluminio que, en conjunto, almacenan aproximadamente 35 kg de hidrógeno comprimido. Teniendo en cuenta el espacio físico que necesitan los cilindros, sólo resulta factible montar los módulos de hidrógeno bajo el chasis o encima de las baterías. Un análisis de seguridad exhaustivo concluyó que existen dos factores importantes para instalar el sistema de hidrógeno encima de las baterías. En primer lugar, debido a la
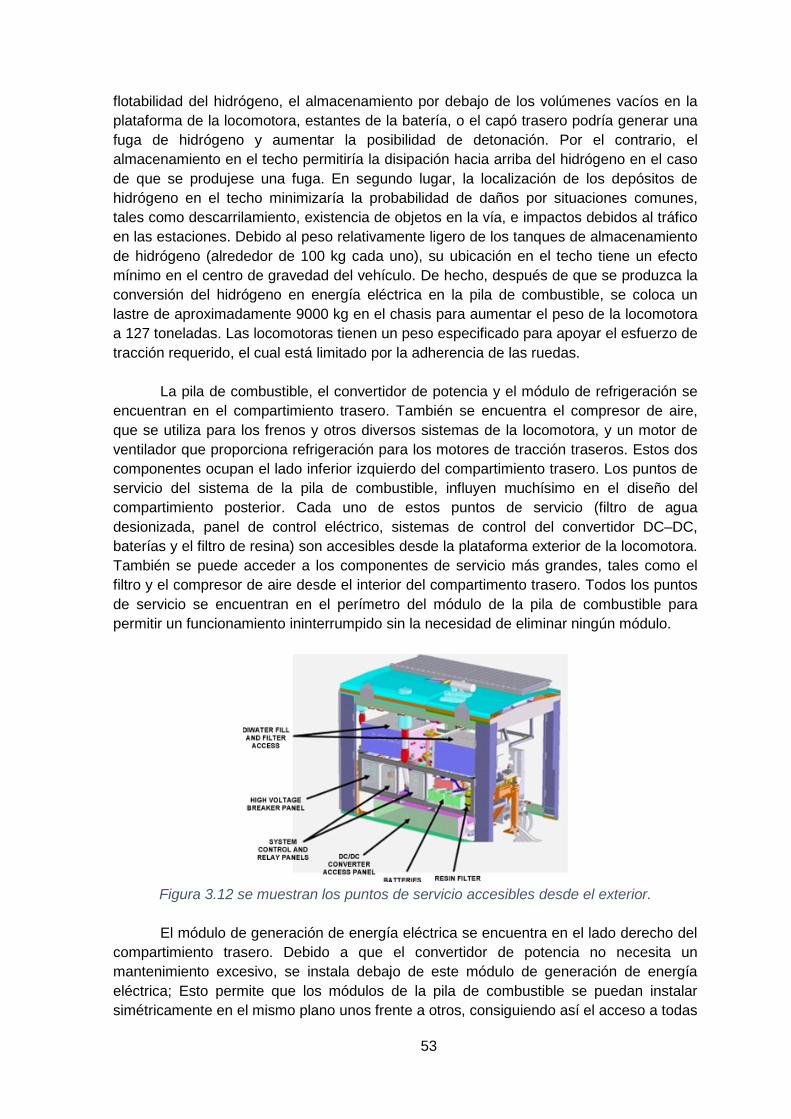
53
flotabilidad del hidrógeno, el almacenamiento por debajo de los volúmenes vacíos en la plataforma de la locomotora, estantes de la batería, o el capó trasero podría generar una fuga de hidrógeno y aumentar la posibilidad de detonación. Por el contrario, el almacenamiento en el techo permitiría la disipación hacia arriba del hidrógeno en el caso de que se produjese una fuga. En segundo lugar, la localización de los depósitos de hidrógeno en el techo minimizaría la probabilidad de daños por situaciones comunes, tales como descarrilamiento, existencia de objetos en la vía, e impactos debidos al tráfico en las estaciones. Debido al peso relativamente ligero de los tanques de almacenamiento de hidrógeno (alrededor de 100 kg cada uno), su ubicación en el techo tiene un efecto mínimo en el centro de gravedad del vehículo. De hecho, después de que se produzca la conversión del hidrógeno en energía eléctrica en la pila de combustible, se coloca un lastre de aproximadamente 9000 kg en el chasis para aumentar el peso de la locomotora a 127 toneladas. Las locomotoras tienen un peso especificado para apoyar el esfuerzo de tracción requerido, el cual está limitado por la adherencia de las ruedas.
La pila de combustible, el convertidor de potencia y el módulo de refrigeración se encuentran en el compartimiento trasero. También se encuentra el compresor de aire, que se utiliza para los frenos y otros diversos sistemas de la locomotora, y un motor de ventilador que proporciona refrigeración para los motores de tracción traseros. Estos dos componentes ocupan el lado inferior izquierdo del compartimiento trasero. Los puntos de servicio del sistema de la pila de combustible, influyen muchísimo en el diseño del compartimiento posterior. Cada uno de estos puntos de servicio (filtro de agua desionizada, panel de control eléctrico, sistemas de control del convertidor DC–DC, baterías y el filtro de resina) son accesibles desde la plataforma exterior de la locomotora. También se puede acceder a los componentes de servicio más grandes, tales como el filtro y el compresor de aire desde el interior del compartimento trasero. Todos los puntos de servicio se encuentran en el perímetro del módulo de la pila de combustible para permitir un funcionamiento ininterrumpido sin la necesidad de eliminar ningún módulo.
Figura 3.12 se muestran los puntos de servicio accesibles desde el exterior.
El módulo de generación de energía eléctrica se encuentra en el lado derecho del
compartimiento trasero. Debido a que el convertidor de potencia no necesita un mantenimiento excesivo, se instala debajo de este módulo de generación de energía eléctrica; Esto permite que los módulos de la pila de combustible se puedan instalar simétricamente en el mismo plano unos frente a otros, consiguiendo así el acceso a todas
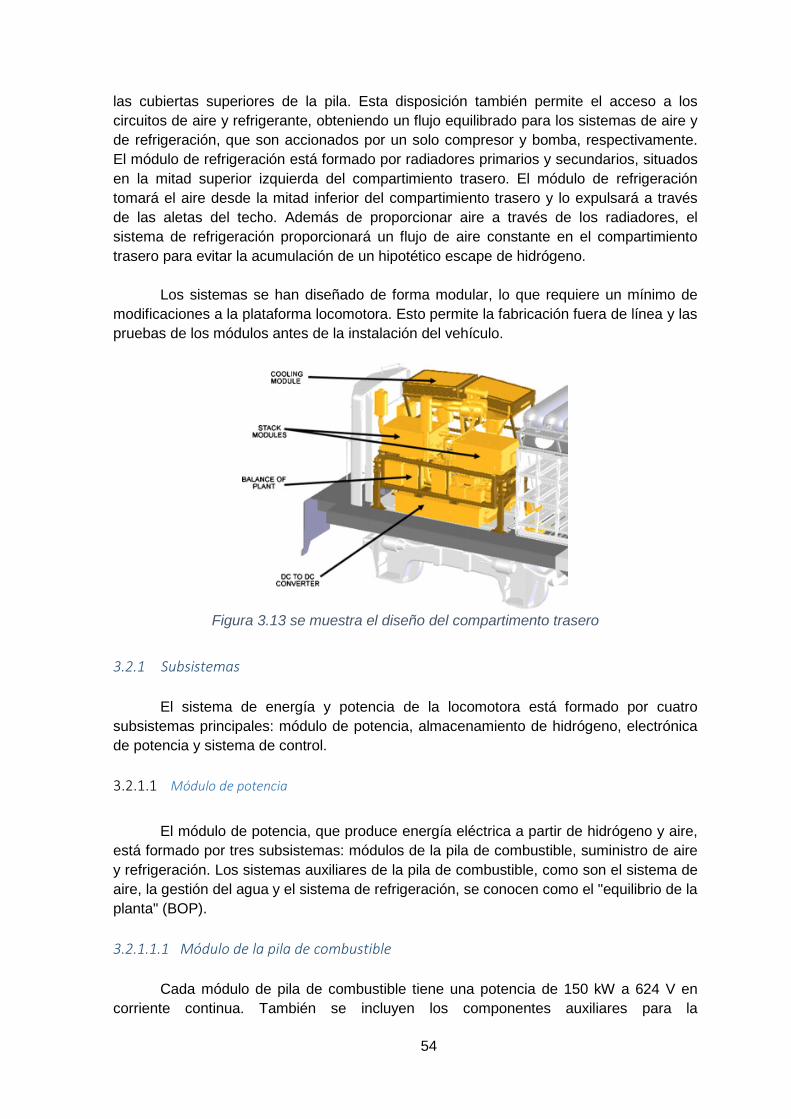
54
las cubiertas superiores de la pila. Esta disposición también permite el acceso a los circuitos de aire y refrigerante, obteniendo un flujo equilibrado para los sistemas de aire y de refrigeración, que son accionados por un solo compresor y bomba, respectivamente. El módulo de refrigeración está formado por radiadores primarios y secundarios, situados en la mitad superior izquierda del compartimiento trasero. El módulo de refrigeración tomará el aire desde la mitad inferior del compartimiento trasero y lo expulsará a través de las aletas del techo. Además de proporcionar aire a través de los radiadores, el sistema de refrigeración proporcionará un flujo de aire constante en el compartimiento trasero para evitar la acumulación de un hipotético escape de hidrógeno.
Los sistemas se han diseñado de forma modular, lo que requiere un mínimo de modificaciones a la plataforma locomotora. Esto permite la fabricación fuera de línea y las pruebas de los módulos antes de la instalación del vehículo.
Figura 3.13 se muestra el diseño del compartimento trasero
3.2.1 Subsistemas
El sistema de energía y potencia de la locomotora está formado por cuatro subsistemas principales: módulo de potencia, almacenamiento de hidrógeno, electrónica de potencia y sistema de control. 3.2.1.1 Módulo de potencia
El módulo de potencia, que produce energía eléctrica a partir de hidrógeno y aire, está formado por tres subsistemas: módulos de la pila de combustible, suministro de aire y refrigeración. Los sistemas auxiliares de la pila de combustible, como son el sistema de aire, la gestión del agua y el sistema de refrigeración, se conocen como el "equilibrio de la planta" (BOP). 3.2.1.1.1 Módulo de la pila de combustible
Cada módulo de pila de combustible tiene una potencia de 150 kW a 624 V en corriente continua. También se incluyen los componentes auxiliares para la
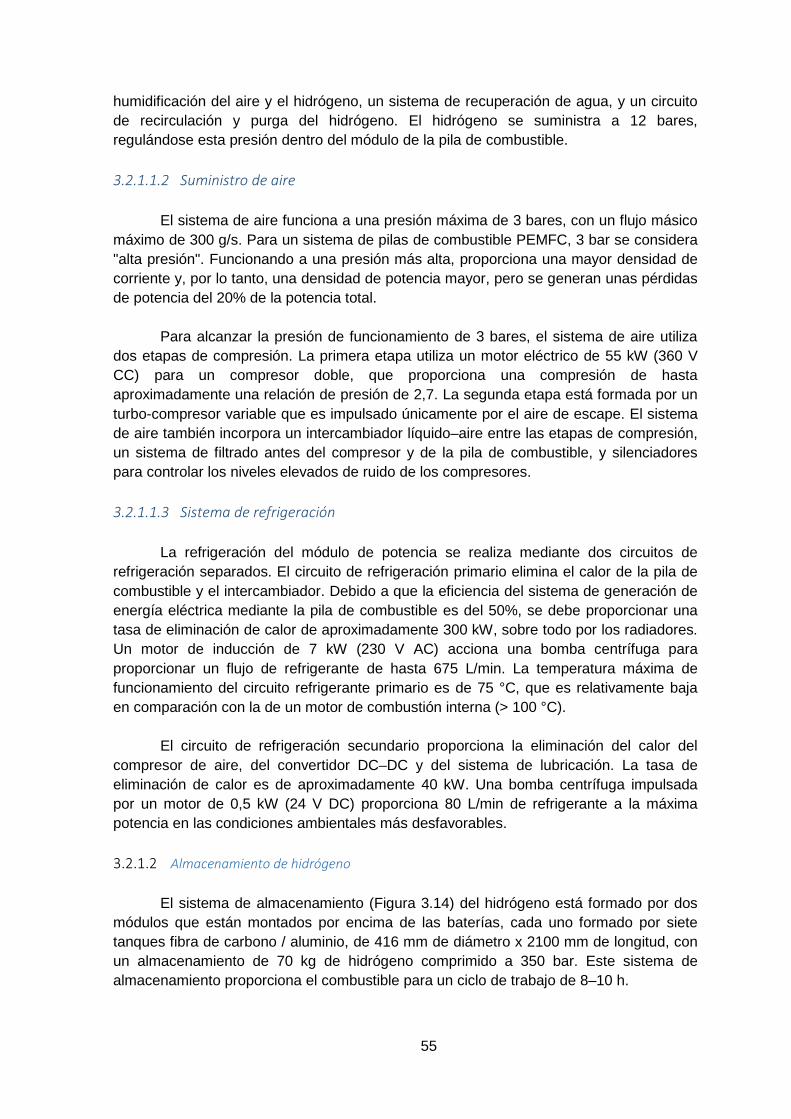
55
humidificación del aire y el hidrógeno, un sistema de recuperación de agua, y un circuito de recirculación y purga del hidrógeno. El hidrógeno se suministra a 12 bares, regulándose esta presión dentro del módulo de la pila de combustible. 3.2.1.1.2 Suministro de aire
El sistema de aire funciona a una presión máxima de 3 bares, con un flujo másico máximo de 300 g/s. Para un sistema de pilas de combustible PEMFC, 3 bar se considera "alta presión". Funcionando a una presión más alta, proporciona una mayor densidad de corriente y, por lo tanto, una densidad de potencia mayor, pero se generan unas pérdidas de potencia del 20% de la potencia total.
Para alcanzar la presión de funcionamiento de 3 bares, el sistema de aire utiliza dos etapas de compresión. La primera etapa utiliza un motor eléctrico de 55 kW (360 V CC) para un compresor doble, que proporciona una compresión de hasta aproximadamente una relación de presión de 2,7. La segunda etapa está formada por un turbo-compresor variable que es impulsado únicamente por el aire de escape. El sistema de aire también incorpora un intercambiador líquido–aire entre las etapas de compresión, un sistema de filtrado antes del compresor y de la pila de combustible, y silenciadores para controlar los niveles elevados de ruido de los compresores. 3.2.1.1.3 Sistema de refrigeración
La refrigeración del módulo de potencia se realiza mediante dos circuitos de refrigeración separados. El circuito de refrigeración primario elimina el calor de la pila de combustible y el intercambiador. Debido a que la eficiencia del sistema de generación de energía eléctrica mediante la pila de combustible es del 50%, se debe proporcionar una tasa de eliminación de calor de aproximadamente 300 kW, sobre todo por los radiadores. Un motor de inducción de 7 kW (230 V AC) acciona una bomba centrífuga para proporcionar un flujo de refrigerante de hasta 675 L/min. La temperatura máxima de funcionamiento del circuito refrigerante primario es de 75 °C, que es relativamente baja en comparación con la de un motor de combustión interna (> 100 °C).
El circuito de refrigeración secundario proporciona la eliminación del calor del compresor de aire, del convertidor DC–DC y del sistema de lubricación. La tasa de eliminación de calor es de aproximadamente 40 kW. Una bomba centrífuga impulsada por un motor de 0,5 kW (24 V DC) proporciona 80 L/min de refrigerante a la máxima potencia en las condiciones ambientales más desfavorables. 3.2.1.2 Almacenamiento de hidrógeno
El sistema de almacenamiento (Figura 3.14) del hidrógeno está formado por dos módulos que están montados por encima de las baterías, cada uno formado por siete tanques fibra de carbono / aluminio, de 416 mm de diámetro x 2100 mm de longitud, con un almacenamiento de 70 kg de hidrógeno comprimido a 350 bar. Este sistema de almacenamiento proporciona el combustible para un ciclo de trabajo de 8–10 h.
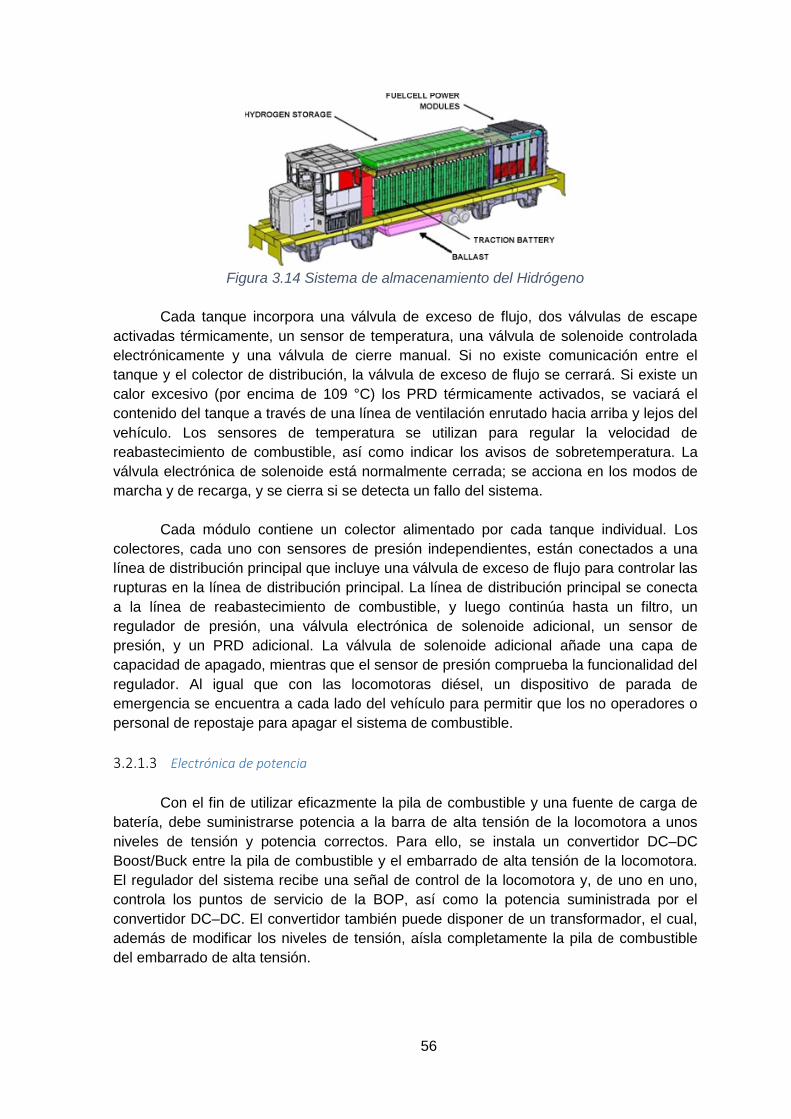
56
Figura 3.14 Sistema de almacenamiento del Hidrógeno
Cada tanque incorpora una válvula de exceso de flujo, dos válvulas de escape
activadas térmicamente, un sensor de temperatura, una válvula de solenoide controlada electrónicamente y una válvula de cierre manual. Si no existe comunicación entre el tanque y el colector de distribución, la válvula de exceso de flujo se cerrará. Si existe un calor excesivo (por encima de 109 °C) los PRD térmicamente activados, se vaciará el contenido del tanque a través de una línea de ventilación enrutado hacia arriba y lejos del vehículo. Los sensores de temperatura se utilizan para regular la velocidad de reabastecimiento de combustible, así como indicar los avisos de sobretemperatura. La válvula electrónica de solenoide está normalmente cerrada; se acciona en los modos de marcha y de recarga, y se cierra si se detecta un fallo del sistema.
Cada módulo contiene un colector alimentado por cada tanque individual. Los colectores, cada uno con sensores de presión independientes, están conectados a una línea de distribución principal que incluye una válvula de exceso de flujo para controlar las rupturas en la línea de distribución principal. La línea de distribución principal se conecta a la línea de reabastecimiento de combustible, y luego continúa hasta un filtro, un regulador de presión, una válvula electrónica de solenoide adicional, un sensor de presión, y un PRD adicional. La válvula de solenoide adicional añade una capa de capacidad de apagado, mientras que el sensor de presión comprueba la funcionalidad del regulador. Al igual que con las locomotoras diésel, un dispositivo de parada de emergencia se encuentra a cada lado del vehículo para permitir que los no operadores o personal de repostaje para apagar el sistema de combustible. 3.2.1.3 Electrónica de potencia
Con el fin de utilizar eficazmente la pila de combustible y una fuente de carga de batería, debe suministrarse potencia a la barra de alta tensión de la locomotora a unos niveles de tensión y potencia correctos. Para ello, se instala un convertidor DC–DC Boost/Buck entre la pila de combustible y el embarrado de alta tensión de la locomotora. El regulador del sistema recibe una señal de control de la locomotora y, de uno en uno, controla los puntos de servicio de la BOP, así como la potencia suministrada por el convertidor DC–DC. El convertidor también puede disponer de un transformador, el cual, además de modificar los niveles de tensión, aísla completamente la pila de combustible del embarrado de alta tensión.
57
Las pilas de combustible funcionan a 600 V DC. Además de suministrar energía eléctrica a la locomotora a través del convertidor DC–DC, estas pilas también suministran energía eléctrica a todos los componentes de la BOP. Dependiendo del tipo de pila de combustible y de las condiciones ambientales de funcionamiento (por ejemplo, la temperatura ambiente del aire y la altitud), el suministro de energía eléctrica a la BOP normalmente puede variar entre el 20% y el 30%. Las necesidades de tensión e intensidad de este consumo pueden variar mucho, por lo que se necesitan varios niveles de tensión diferentes, así como inversores DC–AC. Esta locomotora necesita los siguientes niveles de tensión: 600, 360, 24, 12, y 5 V DC, así como inversores para suministrar 230 V AC al motor de la bomba de refrigeración primaria y a los motores del ventilador del radiador. La tensión de 600 V alimenta la unidad de tracción y carga de la batería, la de 360 V suministra energía eléctrica al motor del compresor de aire y a los inversores, y las tensiones de 12 V y 24 V suministran energía eléctrica a las válvulas, actuadores, sistemas de control y sensores. Aunque la conversión de energía para estas distintas tensiones genera algunas pérdidas de potencia, en muchos casos, no es práctico tener componentes capaces de utilizar sólo una única tensión debido al coste de los componentes y/o la disponibilidad. El módulo de potencia también cuenta con una tensión de 24 V DC para asegurar el suministro de energía eléctrica al sistema de control cuando la pila de combustible no esté disponible. 3.2.1.4 Sistema de control
El funcionamiento de todos los subsistemas de la pila de combustible debe ser controlado y coordinado por un sistema de control central, el cual está formado por la instrumentación, actuadores, reguladores del motor, y un regulador de automatización programable (PAC). El diseño del sistema de control de la planta de energía de célula de combustible debe considerar los siguientes aspectos: la dependencia de la seguridad del vehículo en el sistema de control, el gran número de sensores, controladores, actuadores, las condiciones ambientales extremas a las que puede someterse el sistema de control y la necesidad de un bajo consumo. Estos aspectos condicionan el diseño del PAC, la cual debe tener los siguientes requisitos: (1) ser confiable en situaciones de alta vibración y choque, (2) funcionar bajo un amplio rango de temperaturas, (3) proporcionar una gran variedad de opciones de acondicionamiento de señales y de actuación, (4) ser expandible, y (5) proporcionar un control estricto de los parámetros de funcionamiento del sistema.
Durante el funcionamiento normal, el PAC recibe una señal desde el controlador de la locomotora a través de una conexión CAN. El PAC transmite esta señal al controlador del convertidor DC–DC y también establece las condiciones necesarias para que las pilas de combustible generen la energía eléctrica demandada. En primer lugar, se calcula la tasa de flujo de aire necesaria para generar la energía eléctrica demandada. Se controla el compresor de aire para que aporte el caudal de aire calculado. La intensidad medida también se utiliza para estimar la cantidad de refrigeración necesaria. Se realizan pequeñas correcciones en la velocidad de la bomba de refrigerante midiendo las temperaturas del refrigerante. El hidrógeno se consume a una velocidad que es proporcional a la intensidad generada por la pila de combustible.
58
El PAC supervisa continuamente todas las entradas de los sensores para condiciones anormales o peligrosas en la central de pilas de combustible. Si se detecta una anomalía, se toma la acción apropiada. En la mayoría de los casos, se reduce la potencia de salida, pero podría provocar la desconexión de la central de pilas de combustible. El estado de la planta de energía de célula de combustible se visualiza en la pantalla de interfaz de usuario, incluyendo la presencia de cualquier fallo del sistema.
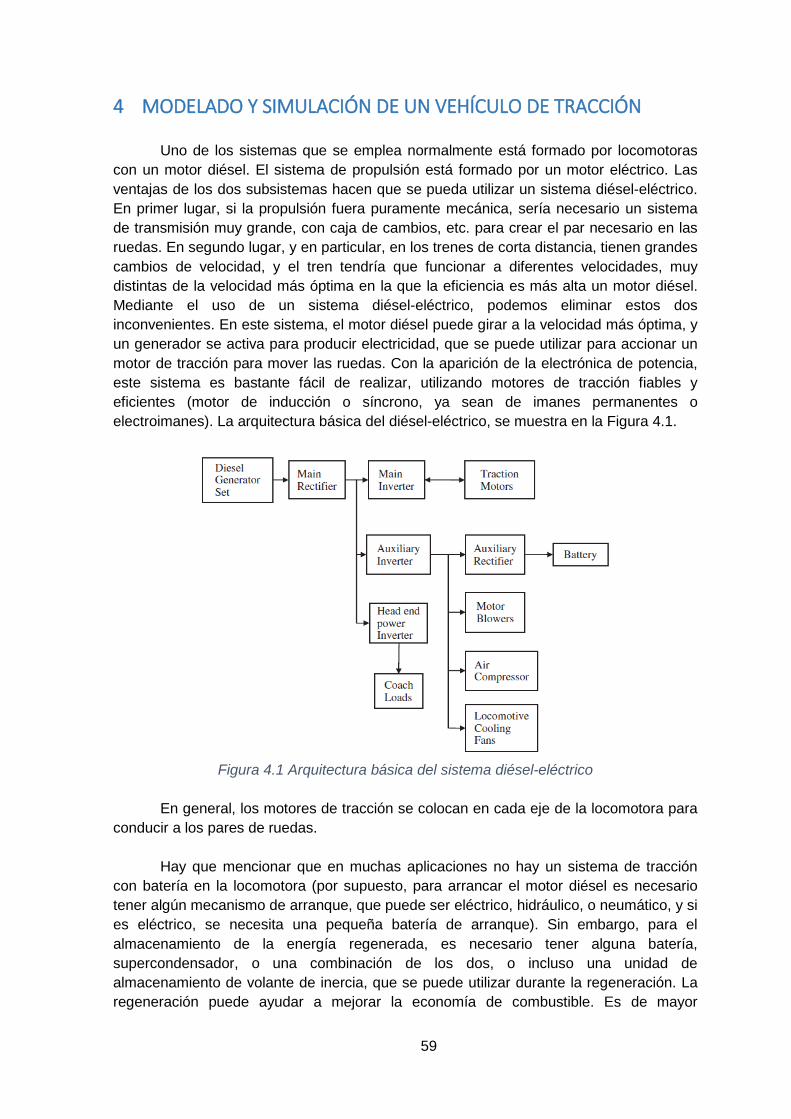
59
4 MODELADO Y SIMULACIÓN DE UN VEHÍCULO DE TRACCIÓN
Uno de los sistemas que se emplea normalmente está formado por locomotoras con un motor diésel. El sistema de propulsión está formado por un motor eléctrico. Las ventajas de los dos subsistemas hacen que se pueda utilizar un sistema diésel-eléctrico. En primer lugar, si la propulsión fuera puramente mecánica, sería necesario un sistema de transmisión muy grande, con caja de cambios, etc. para crear el par necesario en las ruedas. En segundo lugar, y en particular, en los trenes de corta distancia, tienen grandes cambios de velocidad, y el tren tendría que funcionar a diferentes velocidades, muy distintas de la velocidad más óptima en la que la eficiencia es más alta un motor diésel. Mediante el uso de un sistema diésel-eléctrico, podemos eliminar estos dos inconvenientes. En este sistema, el motor diésel puede girar a la velocidad más óptima, y un generador se activa para producir electricidad, que se puede utilizar para accionar un motor de tracción para mover las ruedas. Con la aparición de la electrónica de potencia, este sistema es bastante fácil de realizar, utilizando motores de tracción fiables y eficientes (motor de inducción o síncrono, ya sean de imanes permanentes o electroimanes). La arquitectura básica del diésel-eléctrico, se muestra en la Figura 4.1.
Figura 4.1 Arquitectura básica del sistema diésel-eléctrico
En general, los motores de tracción se colocan en cada eje de la locomotora para
conducir a los pares de ruedas.
Hay que mencionar que en muchas aplicaciones no hay un sistema de tracción con batería en la locomotora (por supuesto, para arrancar el motor diésel es necesario tener algún mecanismo de arranque, que puede ser eléctrico, hidráulico, o neumático, y si es eléctrico, se necesita una pequeña batería de arranque). Sin embargo, para el almacenamiento de la energía regenerada, es necesario tener alguna batería, supercondensador, o una combinación de los dos, o incluso una unidad de almacenamiento de volante de inercia, que se puede utilizar durante la regeneración. La regeneración puede ayudar a mejorar la economía de combustible. Es de mayor
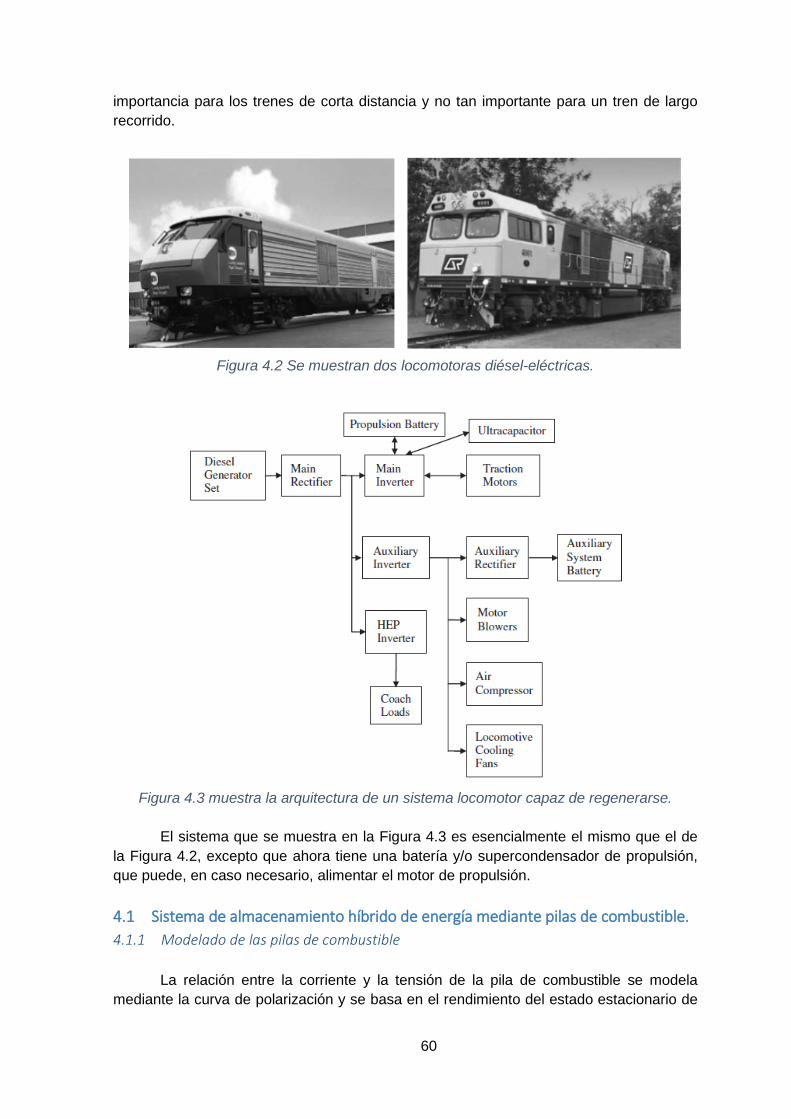
60
importancia para los trenes de corta distancia y no tan importante para un tren de largo recorrido.
Figura 4.2 Se muestran dos locomotoras diésel-eléctricas.
Figura 4.3 muestra la arquitectura de un sistema locomotor capaz de regenerarse.
El sistema que se muestra en la Figura 4.3 es esencialmente el mismo que el de
la Figura 4.2, excepto que ahora tiene una batería y/o supercondensador de propulsión, que puede, en caso necesario, alimentar el motor de propulsión. 4.1 Sistema de almacenamiento híbrido de energía mediante pilas de combustible. 4.1.1 Modelado de las pilas de combustible
La relación entre la corriente y la tensión de la pila de combustible se modela mediante la curva de polarización y se basa en el rendimiento del estado estacionario de
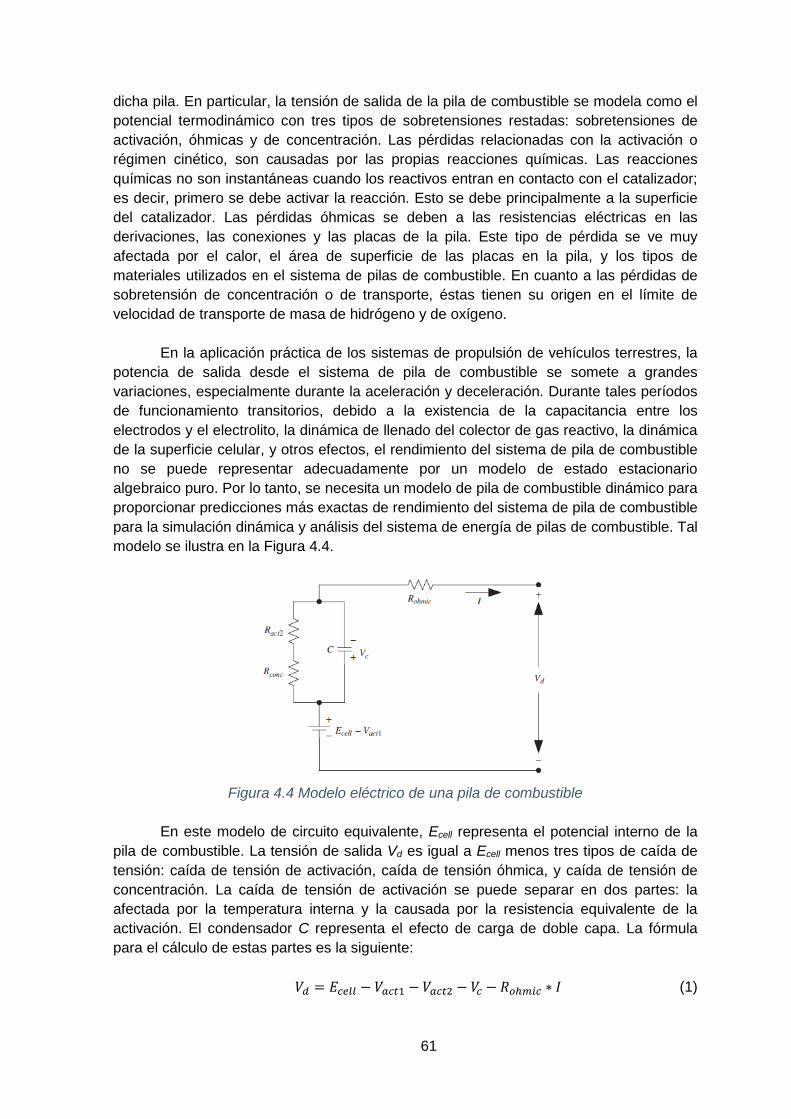
61
dicha pila. En particular, la tensión de salida de la pila de combustible se modela como el potencial termodinámico con tres tipos de sobretensiones restadas: sobretensiones de activación, óhmicas y de concentración. Las pérdidas relacionadas con la activación o régimen cinético, son causadas por las propias reacciones químicas. Las reacciones químicas no son instantáneas cuando los reactivos entran en contacto con el catalizador; es decir, primero se debe activar la reacción. Esto se debe principalmente a la superficie del catalizador. Las pérdidas óhmicas se deben a las resistencias eléctricas en las derivaciones, las conexiones y las placas de la pila. Este tipo de pérdida se ve muy afectada por el calor, el área de superficie de las placas en la pila, y los tipos de materiales utilizados en el sistema de pilas de combustible. En cuanto a las pérdidas de sobretensión de concentración o de transporte, éstas tienen su origen en el límite de velocidad de transporte de masa de hidrógeno y de oxígeno.
En la aplicación práctica de los sistemas de propulsión de vehículos terrestres, la potencia de salida desde el sistema de pila de combustible se somete a grandes variaciones, especialmente durante la aceleración y deceleración. Durante tales períodos de funcionamiento transitorios, debido a la existencia de la capacitancia entre los electrodos y el electrolito, la dinámica de llenado del colector de gas reactivo, la dinámica de la superficie celular, y otros efectos, el rendimiento del sistema de pila de combustible no se puede representar adecuadamente por un modelo de estado estacionario algebraico puro. Por lo tanto, se necesita un modelo de pila de combustible dinámico para proporcionar predicciones más exactas de rendimiento del sistema de pila de combustible para la simulación dinámica y análisis del sistema de energía de pilas de combustible. Tal modelo se ilustra en la Figura 4.4.
Figura 4.4 Modelo eléctrico de una pila de combustible
En este modelo de circuito equivalente, Ecell representa el potencial interno de la
pila de combustible. La tensión de salida Vd es igual a Ecell menos tres tipos de caída de tensión: caída de tensión de activación, caída de tensión óhmica, y caída de tensión de concentración. La caída de tensión de activación se puede separar en dos partes: la afectada por la temperatura interna y la causada por la resistencia equivalente de la activación. El condensador C representa el efecto de carga de doble capa. La fórmula para el cálculo de estas partes es la siguiente:
𝑉𝑉𝑑𝑑 = 𝐸𝐸𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 − 𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎1 − 𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎2 − 𝑉𝑉𝑐𝑐 − 𝑅𝑅𝑜𝑜ℎ𝑚𝑚𝑚𝑚𝑐𝑐 ∗ 𝐼𝐼 (1)
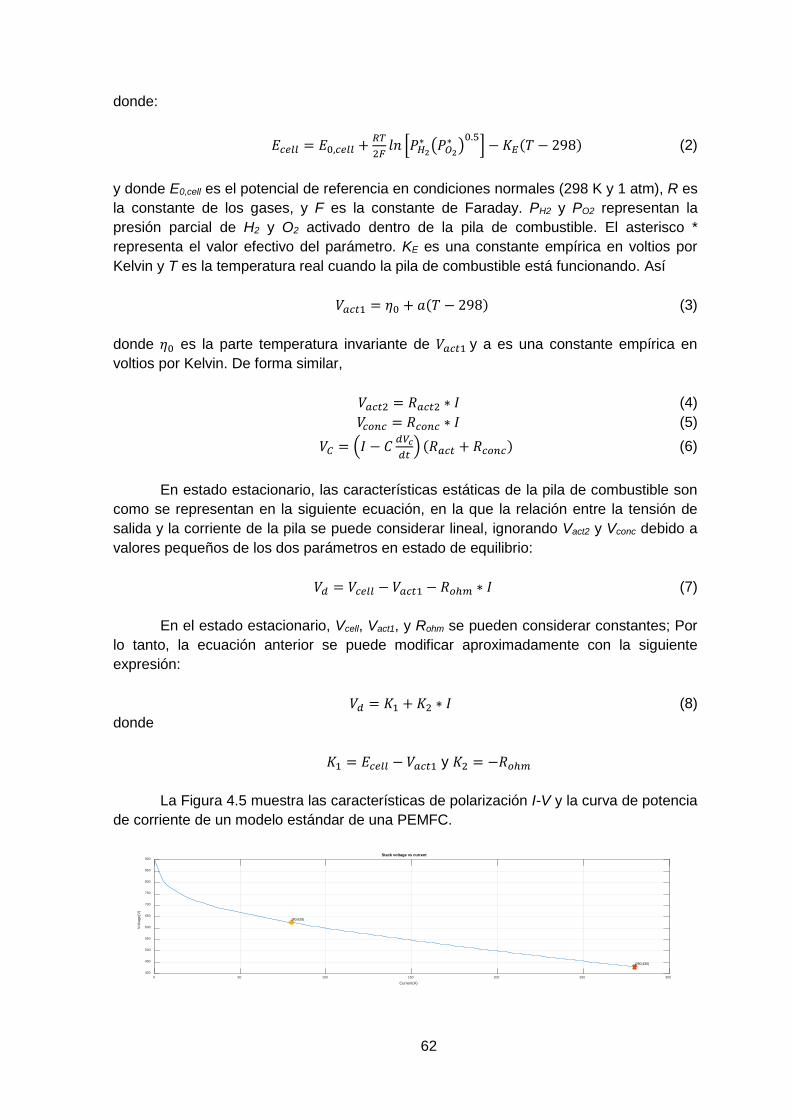
62
donde:
𝐸𝐸𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 = 𝐸𝐸0,𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 + 𝑅𝑅𝑅𝑅2𝐹𝐹𝑙𝑙𝑙𝑙 �𝑃𝑃𝐻𝐻2
∗ �𝑃𝑃𝑂𝑂2∗ �0.5� − 𝐾𝐾𝐸𝐸(𝑇𝑇 − 298) (2)
y donde E0,cell es el potencial de referencia en condiciones normales (298 K y 1 atm), R es la constante de los gases, y F es la constante de Faraday. PH2 y PO2 representan la presión parcial de H2 y O2 activado dentro de la pila de combustible. El asterisco * representa el valor efectivo del parámetro. KE es una constante empírica en voltios por Kelvin y T es la temperatura real cuando la pila de combustible está funcionando. Así
𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎1 = 𝜂𝜂0 + 𝑎𝑎(𝑇𝑇 − 298) (3) donde 𝜂𝜂0 es la parte temperatura invariante de 𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎1 y a es una constante empírica en voltios por Kelvin. De forma similar,
𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎2 = 𝑅𝑅𝑎𝑎𝑐𝑐𝑎𝑎2 ∗ 𝐼𝐼 (4) 𝑉𝑉𝑐𝑐𝑜𝑜𝑐𝑐𝑐𝑐 = 𝑅𝑅𝑐𝑐𝑜𝑜𝑐𝑐𝑐𝑐 ∗ 𝐼𝐼 (5)
𝑉𝑉𝐶𝐶 = �𝐼𝐼 − 𝐶𝐶 𝑑𝑑𝑉𝑉𝑐𝑐𝑑𝑑𝑎𝑎� (𝑅𝑅𝑎𝑎𝑐𝑐𝑎𝑎 + 𝑅𝑅𝑐𝑐𝑜𝑜𝑐𝑐𝑐𝑐) (6)
En estado estacionario, las características estáticas de la pila de combustible son
como se representan en la siguiente ecuación, en la que la relación entre la tensión de salida y la corriente de la pila se puede considerar lineal, ignorando Vact2 y Vconc debido a valores pequeños de los dos parámetros en estado de equilibrio:
𝑉𝑉𝑑𝑑 = 𝑉𝑉𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 − 𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎1 − 𝑅𝑅𝑜𝑜ℎ𝑚𝑚 ∗ 𝐼𝐼 (7)
En el estado estacionario, Vcell, Vact1, y Rohm se pueden considerar constantes; Por
lo tanto, la ecuación anterior se puede modificar aproximadamente con la siguiente expresión:
𝑉𝑉𝑑𝑑 = 𝐾𝐾1 + 𝐾𝐾2 ∗ 𝐼𝐼 (8) donde
𝐾𝐾1 = 𝐸𝐸𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 − 𝑉𝑉𝑎𝑎𝑐𝑐𝑎𝑎1 y 𝐾𝐾2 = −𝑅𝑅𝑜𝑜ℎ𝑚𝑚
La Figura 4.5 muestra las características de polarización I-V y la curva de potencia de corriente de un modelo estándar de una PEMFC.
Current(A)0 50 100 150 200 250 300
Volta
ge(V
)
400
450
500
550
600
650
700
750
800
850
900
(280,430)
(80,625)
Stack voltage vs current
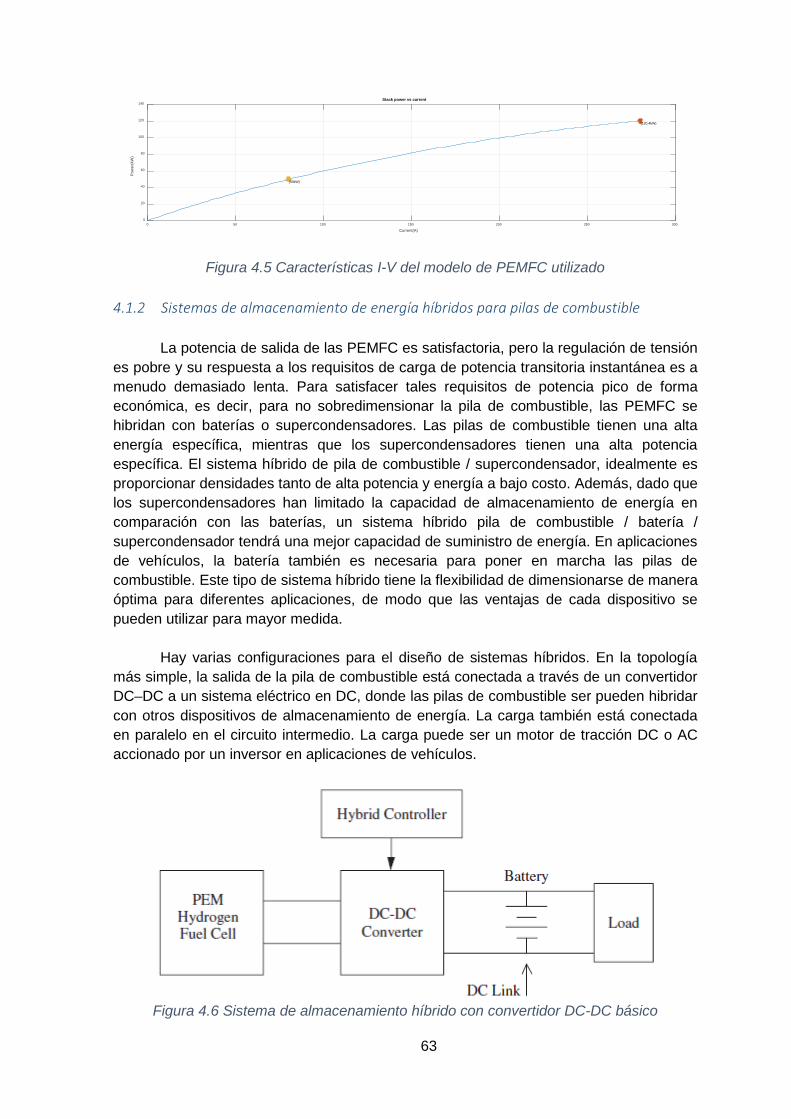
63
Figura 4.5 Características I-V del modelo de PEMFC utilizado
4.1.2 Sistemas de almacenamiento de energía híbridos para pilas de combustible
La potencia de salida de las PEMFC es satisfactoria, pero la regulación de tensión es pobre y su respuesta a los requisitos de carga de potencia transitoria instantánea es a menudo demasiado lenta. Para satisfacer tales requisitos de potencia pico de forma económica, es decir, para no sobredimensionar la pila de combustible, las PEMFC se hibridan con baterías o supercondensadores. Las pilas de combustible tienen una alta energía específica, mientras que los supercondensadores tienen una alta potencia específica. El sistema híbrido de pila de combustible / supercondensador, idealmente es proporcionar densidades tanto de alta potencia y energía a bajo costo. Además, dado que los supercondensadores han limitado la capacidad de almacenamiento de energía en comparación con las baterías, un sistema híbrido pila de combustible / batería / supercondensador tendrá una mejor capacidad de suministro de energía. En aplicaciones de vehículos, la batería también es necesaria para poner en marcha las pilas de combustible. Este tipo de sistema híbrido tiene la flexibilidad de dimensionarse de manera óptima para diferentes aplicaciones, de modo que las ventajas de cada dispositivo se pueden utilizar para mayor medida.
Hay varias configuraciones para el diseño de sistemas híbridos. En la topología más simple, la salida de la pila de combustible está conectada a través de un convertidor DC–DC a un sistema eléctrico en DC, donde las pilas de combustible ser pueden hibridar con otros dispositivos de almacenamiento de energía. La carga también está conectada en paralelo en el circuito intermedio. La carga puede ser un motor de tracción DC o AC accionado por un inversor en aplicaciones de vehículos.
Figura 4.6 Sistema de almacenamiento híbrido con convertidor DC-DC básico
Current(A)0 50 100 150 200 250 300
Pow
er(k
W)
0
20
40
60
80
100
120
140
(120.4kW)
(50kW)
Stack power vs current

64
Un componente clave es el controlador híbrido que controla el flujo de potencia
entre las diferentes fuentes de energía en diferentes condiciones de carga. El controlador híbrido será responsable de la administración de energía y la energía del sistema híbrido.
El uso de las pilas puede limitar la tensión del circuito intermedio. Dependiendo del número de pilas en serie, las baterías tienen un valor de tensión definida. Como resultado, la salida del convertidor debe mantener un valor correspondiente a la tensión de la batería. Sin embargo, con el uso de supercondensadores, que no dependen de la tensión, la salida del convertidor se puede ajustar a cualquier tensión que se necesita por una carga particular. Si se desea el uso de pilas a la salida del convertidor, los supercondensadores todavía se pueden utilizar en la entrada del convertidor o la salida de la pila de combustible para estabilizar aún más el sistema y reducir los picos de corriente en dicha pila.
Figura 4.7 Sistema de almacenamiento híbrido con convertidor DC-DC con
supercondensadores
También podemos utilizar una doble entrada del convertidor DC–DC (DIC) para conectar una PEMFC y una unidad de batería. La PEMFC y la batería están conectadas en paralelo de modo que ambas fuentes pueden alimentar la carga. Esta topología permitirá que cada fuente de energía funcione independientemente con los beneficios de cada una, utilizando una técnica apropiada de control híbrida. Por ejemplo, la batería se puede controlar por tensión para mantener la tensión de enlace DC constante, mientras que la PEMFC se controla con el fin de proporcionar la carga conectada con la corriente requerida. La DIC puede basarse en un convertidor buck-boost, que permite los niveles de tensión de su fuente de energía para estar por encima o por debajo del nivel de tensión del circuito intermedio.
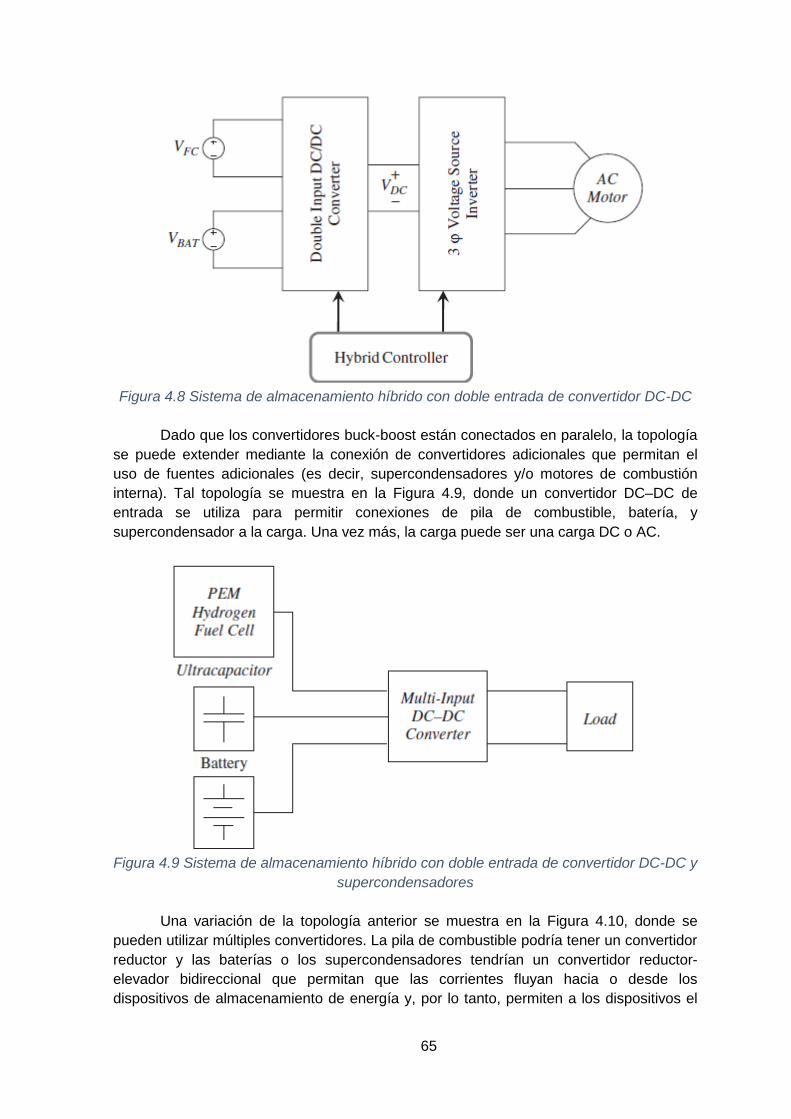
65
Figura 4.8 Sistema de almacenamiento híbrido con doble entrada de convertidor DC-DC
Dado que los convertidores buck-boost están conectados en paralelo, la topología
se puede extender mediante la conexión de convertidores adicionales que permitan el uso de fuentes adicionales (es decir, supercondensadores y/o motores de combustión interna). Tal topología se muestra en la Figura 4.9, donde un convertidor DC–DC de entrada se utiliza para permitir conexiones de pila de combustible, batería, y supercondensador a la carga. Una vez más, la carga puede ser una carga DC o AC.
Figura 4.9 Sistema de almacenamiento híbrido con doble entrada de convertidor DC-DC y
supercondensadores
Una variación de la topología anterior se muestra en la Figura 4.10, donde se pueden utilizar múltiples convertidores. La pila de combustible podría tener un convertidor reductor y las baterías o los supercondensadores tendrían un convertidor reductor-elevador bidireccional que permitan que las corrientes fluyan hacia o desde los dispositivos de almacenamiento de energía y, por lo tanto, permiten a los dispositivos el
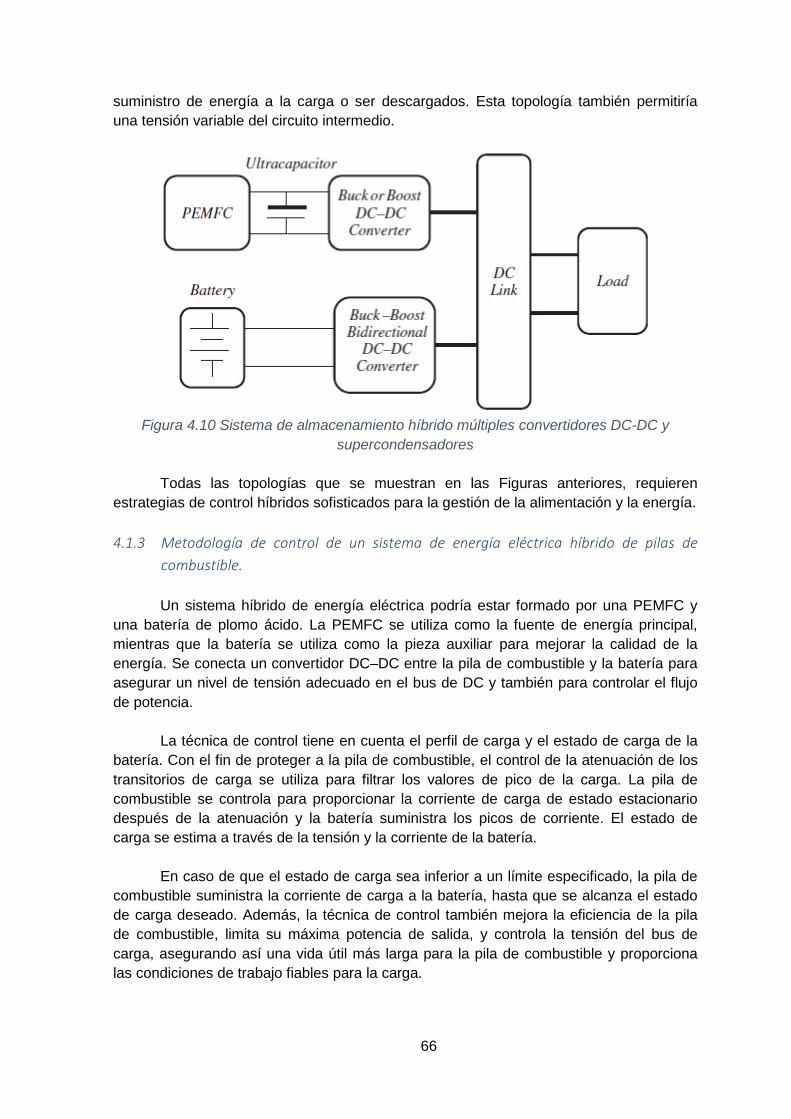
66
suministro de energía a la carga o ser descargados. Esta topología también permitiría una tensión variable del circuito intermedio.
Figura 4.10 Sistema de almacenamiento híbrido múltiples convertidores DC-DC y
supercondensadores
Todas las topologías que se muestran en las Figuras anteriores, requieren estrategias de control híbridos sofisticados para la gestión de la alimentación y la energía.
4.1.3 Metodología de control de un sistema de energía eléctrica híbrido de pilas de
combustible.
Un sistema híbrido de energía eléctrica podría estar formado por una PEMFC y una batería de plomo ácido. La PEMFC se utiliza como la fuente de energía principal, mientras que la batería se utiliza como la pieza auxiliar para mejorar la calidad de la energía. Se conecta un convertidor DC–DC entre la pila de combustible y la batería para asegurar un nivel de tensión adecuado en el bus de DC y también para controlar el flujo de potencia.
La técnica de control tiene en cuenta el perfil de carga y el estado de carga de la batería. Con el fin de proteger a la pila de combustible, el control de la atenuación de los transitorios de carga se utiliza para filtrar los valores de pico de la carga. La pila de combustible se controla para proporcionar la corriente de carga de estado estacionario después de la atenuación y la batería suministra los picos de corriente. El estado de carga se estima a través de la tensión y la corriente de la batería.
En caso de que el estado de carga sea inferior a un límite especificado, la pila de combustible suministra la corriente de carga a la batería, hasta que se alcanza el estado de carga deseado. Además, la técnica de control también mejora la eficiencia de la pila de combustible, limita su máxima potencia de salida, y controla la tensión del bus de carga, asegurando así una vida útil más larga para la pila de combustible y proporciona las condiciones de trabajo fiables para la carga.
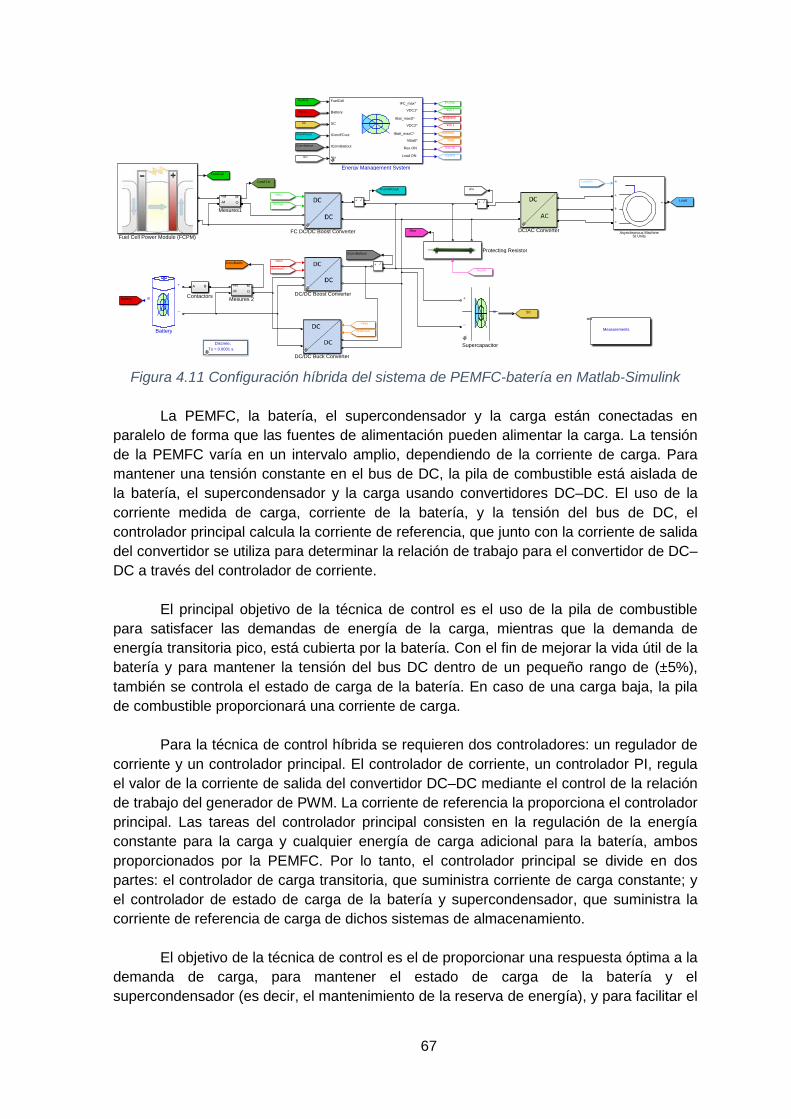
67
Figura 4.11 Configuración híbrida del sistema de PEMFC-batería en Matlab-Simulink
La PEMFC, la batería, el supercondensador y la carga están conectadas en
paralelo de forma que las fuentes de alimentación pueden alimentar la carga. La tensión de la PEMFC varía en un intervalo amplio, dependiendo de la corriente de carga. Para mantener una tensión constante en el bus de DC, la pila de combustible está aislada de la batería, el supercondensador y la carga usando convertidores DC–DC. El uso de la corriente medida de carga, corriente de la batería, y la tensión del bus de DC, el controlador principal calcula la corriente de referencia, que junto con la corriente de salida del convertidor se utiliza para determinar la relación de trabajo para el convertidor de DC–DC a través del controlador de corriente.
El principal objetivo de la técnica de control es el uso de la pila de combustible para satisfacer las demandas de energía de la carga, mientras que la demanda de energía transitoria pico, está cubierta por la batería. Con el fin de mejorar la vida útil de la batería y para mantener la tensión del bus DC dentro de un pequeño rango de (±5%), también se controla el estado de carga de la batería. En caso de una carga baja, la pila de combustible proporcionará una corriente de carga.
Para la técnica de control híbrida se requieren dos controladores: un regulador de corriente y un controlador principal. El controlador de corriente, un controlador PI, regula el valor de la corriente de salida del convertidor DC–DC mediante el control de la relación de trabajo del generador de PWM. La corriente de referencia la proporciona el controlador principal. Las tareas del controlador principal consisten en la regulación de la energía constante para la carga y cualquier energía de carga adicional para la batería, ambos proporcionados por la PEMFC. Por lo tanto, el controlador principal se divide en dos partes: el controlador de carga transitoria, que suministra corriente de carga constante; y el controlador de estado de carga de la batería y supercondensador, que suministra la corriente de referencia de carga de dichos sistemas de almacenamiento.
El objetivo de la técnica de control es el de proporcionar una respuesta óptima a la demanda de carga, para mantener el estado de carga de la batería y el supercondensador (es decir, el mantenimiento de la reserva de energía), y para facilitar el
Discrete,Ts = 0.0001 s.
Protecting Resistor
Measurements
M+M-M O
Mesures1
M+M-M O
Mesures 2
Res
IConvBattout
Load
IConvFCout
ConvBattin
ConvFCin
SC
FuelCell
Iinv
LoadON
ResON
VBatt
IBattmaxC
IBattmaxD
VDC2
VDC1
IFCmax
Battery
Fuel Cell Power Module (FCPM)
VDC1
IConvBattout
IConvFCout
SC
Iinv
LoadON
ResON
VBatt
IBattmaxC
VDC2
IBattmaxD
IFCmax
Battery
FuelCell
FC DC/DC Boost Converter
FuelCell
Battery
SC
IConvFCout
IConvBattout
Iinv
IFC_max*
VDC1*
IBat_maxD*
VDC2*
IBatt_maxC*
VBatt*
Res ON
Load ON
Energy Management System
DC/DC Buck Converter
DC/DC Boost Converter
DC/AC Converter
i+ - i+ -
i+ -
A B
Contactors
+
_
m
Battery
+
_
m
Supercapacitor
m
A
B
C
w
Asynchronous MachineSI Units
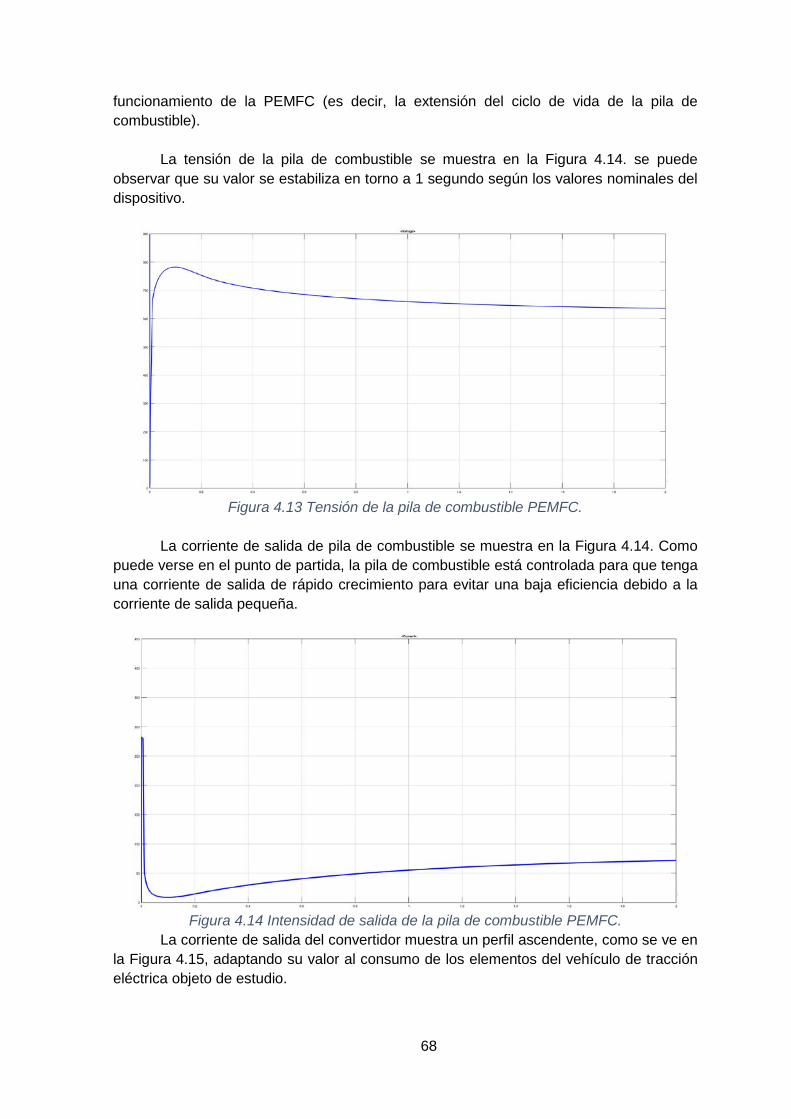
68
funcionamiento de la PEMFC (es decir, la extensión del ciclo de vida de la pila de combustible).
La tensión de la pila de combustible se muestra en la Figura 4.14. se puede observar que su valor se estabiliza en torno a 1 segundo según los valores nominales del dispositivo.
Figura 4.13 Tensión de la pila de combustible PEMFC.
La corriente de salida de pila de combustible se muestra en la Figura 4.14. Como
puede verse en el punto de partida, la pila de combustible está controlada para que tenga una corriente de salida de rápido crecimiento para evitar una baja eficiencia debido a la corriente de salida pequeña.
Figura 4.14 Intensidad de salida de la pila de combustible PEMFC.
La corriente de salida del convertidor muestra un perfil ascendente, como se ve en la Figura 4.15, adaptando su valor al consumo de los elementos del vehículo de tracción eléctrica objeto de estudio.
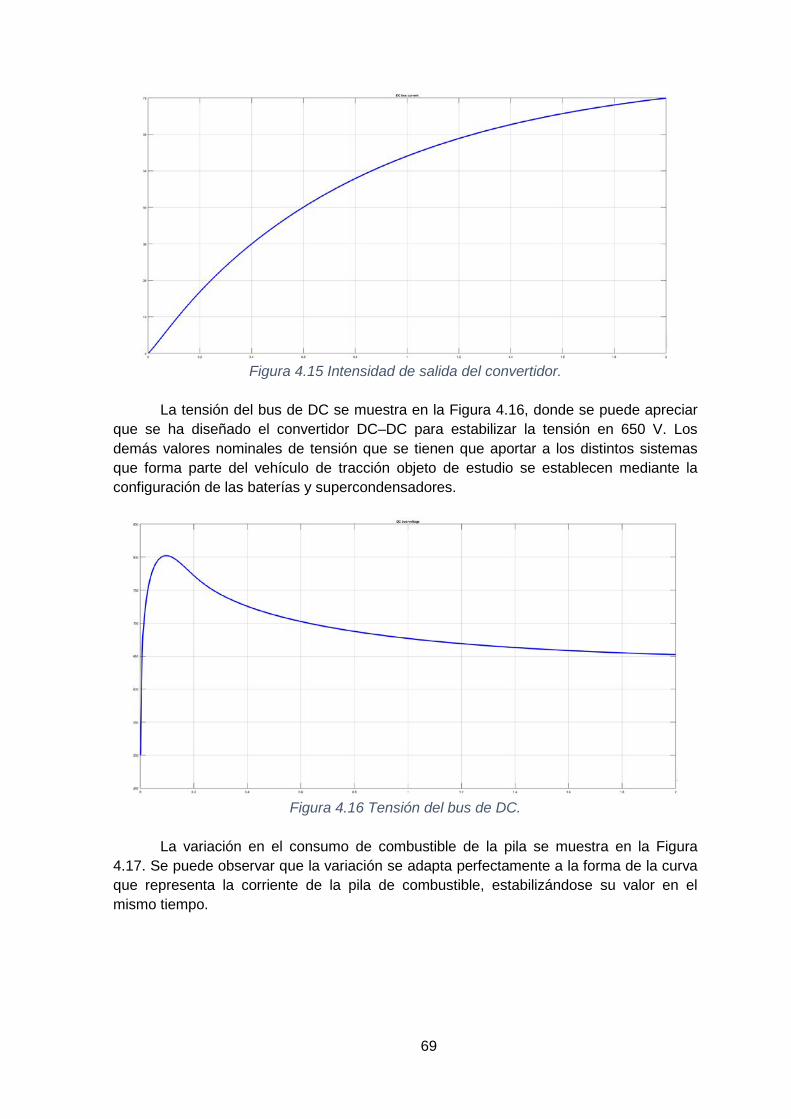
69
Figura 4.15 Intensidad de salida del convertidor.
La tensión del bus de DC se muestra en la Figura 4.16, donde se puede apreciar
que se ha diseñado el convertidor DC–DC para estabilizar la tensión en 650 V. Los demás valores nominales de tensión que se tienen que aportar a los distintos sistemas que forma parte del vehículo de tracción objeto de estudio se establecen mediante la configuración de las baterías y supercondensadores.
Figura 4.16 Tensión del bus de DC.
La variación en el consumo de combustible de la pila se muestra en la Figura
4.17. Se puede observar que la variación se adapta perfectamente a la forma de la curva que representa la corriente de la pila de combustible, estabilizándose su valor en el mismo tiempo.
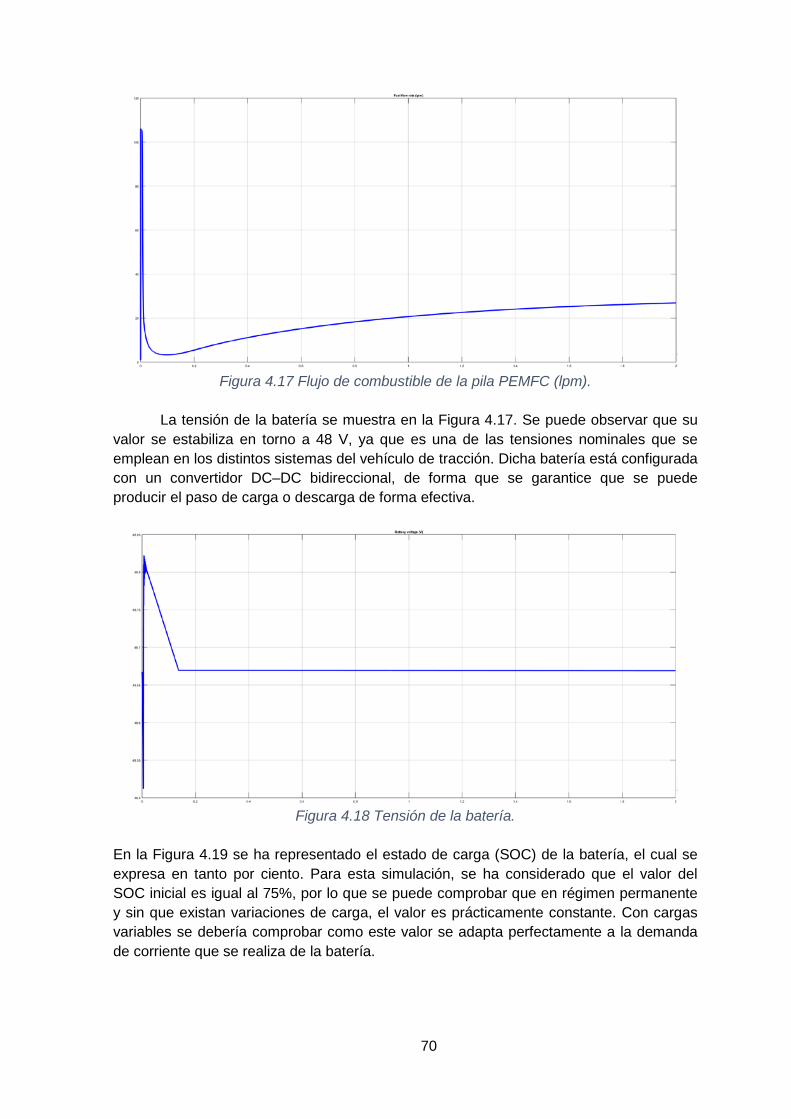
70
Figura 4.17 Flujo de combustible de la pila PEMFC (lpm).
La tensión de la batería se muestra en la Figura 4.17. Se puede observar que su
valor se estabiliza en torno a 48 V, ya que es una de las tensiones nominales que se emplean en los distintos sistemas del vehículo de tracción. Dicha batería está configurada con un convertidor DC–DC bidireccional, de forma que se garantice que se puede producir el paso de carga o descarga de forma efectiva.
Figura 4.18 Tensión de la batería.
En la Figura 4.19 se ha representado el estado de carga (SOC) de la batería, el cual se expresa en tanto por ciento. Para esta simulación, se ha considerado que el valor del SOC inicial es igual al 75%, por lo que se puede comprobar que en régimen permanente y sin que existan variaciones de carga, el valor es prácticamente constante. Con cargas variables se debería comprobar como este valor se adapta perfectamente a la demanda de corriente que se realiza de la batería.
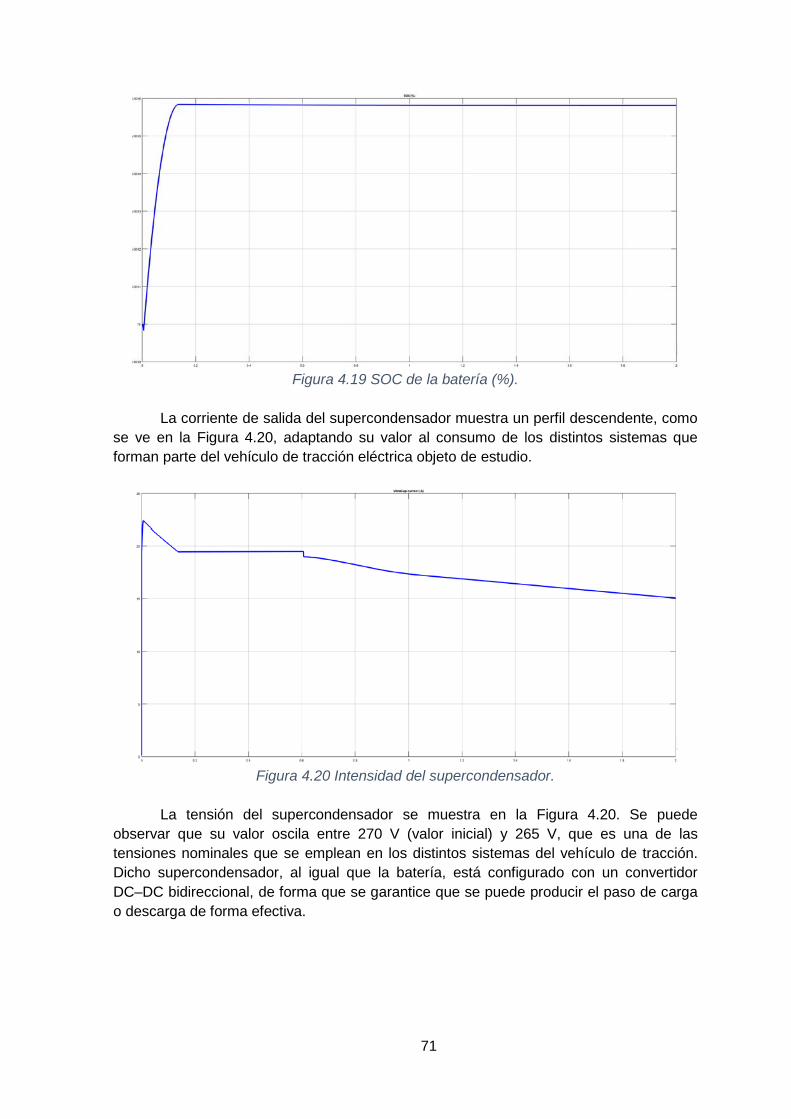
71
Figura 4.19 SOC de la batería (%).
La corriente de salida del supercondensador muestra un perfil descendente, como
se ve en la Figura 4.20, adaptando su valor al consumo de los distintos sistemas que forman parte del vehículo de tracción eléctrica objeto de estudio.
Figura 4.20 Intensidad del supercondensador.
La tensión del supercondensador se muestra en la Figura 4.20. Se puede
observar que su valor oscila entre 270 V (valor inicial) y 265 V, que es una de las tensiones nominales que se emplean en los distintos sistemas del vehículo de tracción. Dicho supercondensador, al igual que la batería, está configurado con un convertidor DC–DC bidireccional, de forma que se garantice que se puede producir el paso de carga o descarga de forma efectiva.
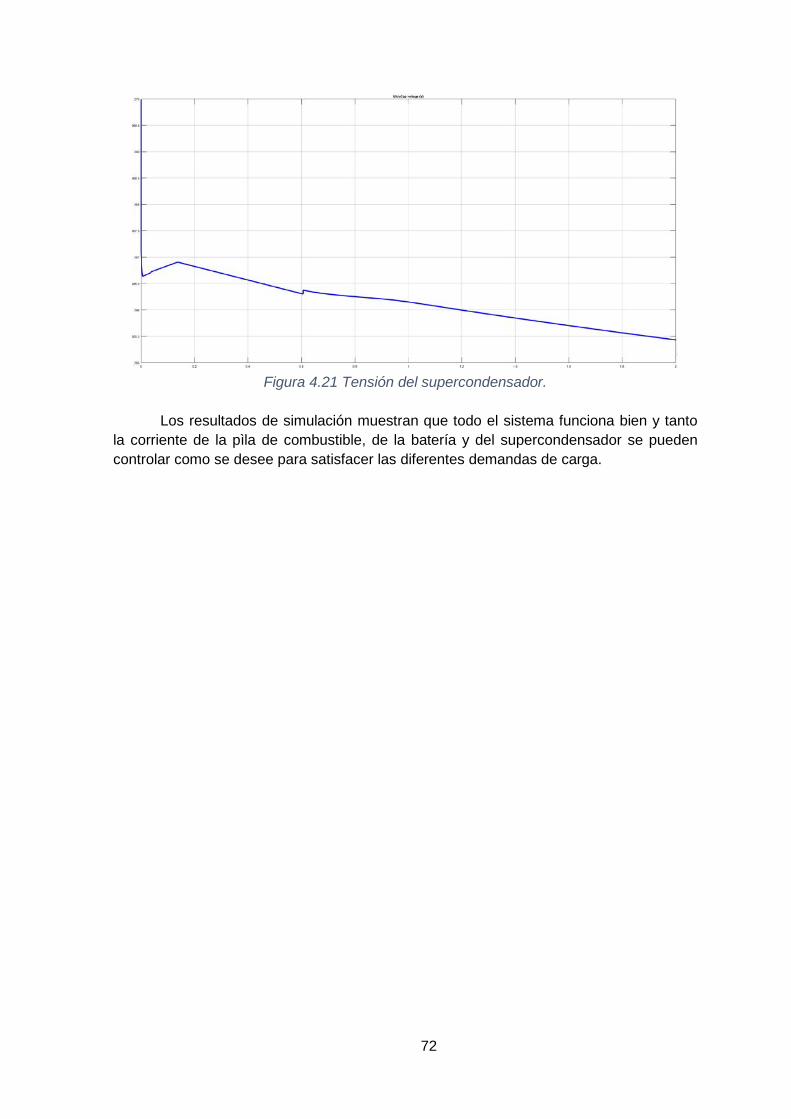
72
Figura 4.21 Tensión del supercondensador.
Los resultados de simulación muestran que todo el sistema funciona bien y tanto
la corriente de la pìla de combustible, de la batería y del supercondensador se pueden controlar como se desee para satisfacer las diferentes demandas de carga.
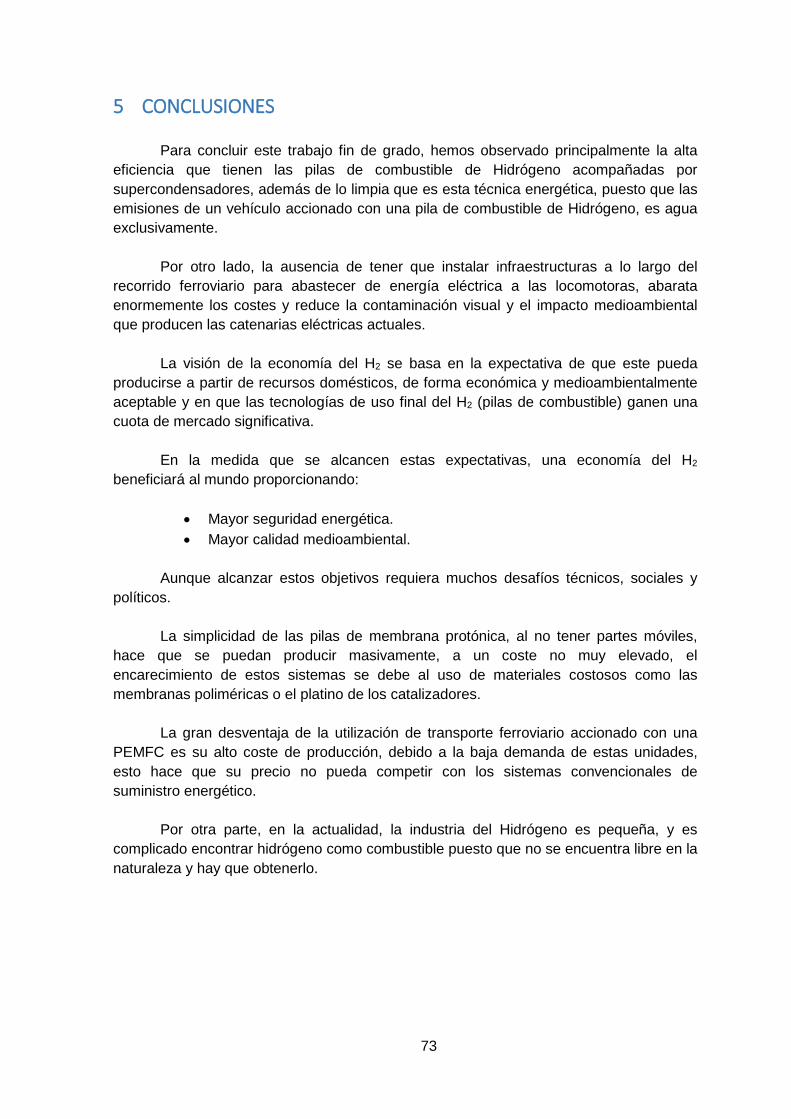
73
5 CONCLUSIONES Para concluir este trabajo fin de grado, hemos observado principalmente la alta
eficiencia que tienen las pilas de combustible de Hidrógeno acompañadas por supercondensadores, además de lo limpia que es esta técnica energética, puesto que las emisiones de un vehículo accionado con una pila de combustible de Hidrógeno, es agua exclusivamente.
Por otro lado, la ausencia de tener que instalar infraestructuras a lo largo del
recorrido ferroviario para abastecer de energía eléctrica a las locomotoras, abarata enormemente los costes y reduce la contaminación visual y el impacto medioambiental que producen las catenarias eléctricas actuales.
La visión de la economía del H2 se basa en la expectativa de que este pueda
producirse a partir de recursos domésticos, de forma económica y medioambientalmente aceptable y en que las tecnologías de uso final del H2 (pilas de combustible) ganen una cuota de mercado significativa.
En la medida que se alcancen estas expectativas, una economía del H2
beneficiará al mundo proporcionando:
• Mayor seguridad energética. • Mayor calidad medioambiental.
Aunque alcanzar estos objetivos requiera muchos desafíos técnicos, sociales y
políticos. La simplicidad de las pilas de membrana protónica, al no tener partes móviles,
hace que se puedan producir masivamente, a un coste no muy elevado, el encarecimiento de estos sistemas se debe al uso de materiales costosos como las membranas poliméricas o el platino de los catalizadores.
La gran desventaja de la utilización de transporte ferroviario accionado con una
PEMFC es su alto coste de producción, debido a la baja demanda de estas unidades, esto hace que su precio no pueda competir con los sistemas convencionales de suministro energético.
Por otra parte, en la actualidad, la industria del Hidrógeno es pequeña, y es
complicado encontrar hidrógeno como combustible puesto que no se encuentra libre en la naturaleza y hay que obtenerlo.
74
6 REFERENCIAS BIBLIOGRÁFICAS
1. McNicol, B.D; Rand, D.A.J; Williams, K.R. 2001. Fuel cells for road transportation purposes. Journal of Power Sources. Inglaterra Elsevier.
2. Mekhilef, S; Saidur, R; Safari, A. 2012. Comparative study of different fuel cell
technologies. Renewable and Sustainable Energy Reviews. Malaysia. Elsevier.
3. Miller, A.R; Hess, K.S; Barnes, D.L; Erickson, T.L. 2007. System design of a large
fuel cell hybrid locomotive. Vehicle Projects LLC. Denver (U.S.A).
4. Spiryagin, M; Cole, C; Quan Sun, Y; McClanachan, M; Spiryagin, V; McSweeney,
T. 2014. Design and Simulation of Rail Vehicles. CRC Press. New York (U.S.A)
5. Mi, C; Masrur, M.A; Gao, D.W. 2011. Hybrid Electric vehicles. Principles and
applications with practical perspectives. WILLEY. U.S.A.