Embed Size (px)
Citation preview

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 1/145
1. INTRODUCERE ÎN PROBLEMATICA MODELĂRIIModelarea constituie o activitate indispensabilă pentru conceperea şi exploatarea eficie
echipamentelor şi tehnologiilor specifice diferitelor ramuri ale ingineriei. Modelele elaborate în acefac apel, cu precădere, la un limbaj matematic riguros şi caută să pună în valoare aplicabilitatea fizicii pentru a surprinde cât mai precis esenţa fenomenelor. tenţia acordată în prezent modelări potenţată de facilităţile mediilor soft!are dezvoltate în ultimul deceniu, care permit operarea cu modmai complexe, în condiţiile unei precizii ridicate a calculelor şi a creşterii continue a vitezei de lucru.
"n acest context, efortul investit recent în perfecţionarea tehnicilor de modelare a fost dirijat #palte direcţii$ şi către explorarea legăturilor dintre interpretarea cauzală a fenomenelor #care se bucîndelungată tradiţie, creată în cadrul ştiinţei sistemelor$ şi modul în care este transferată şi procesată #ca suport nemijlocit al funcţionării echipamentelor$. %nvestigarea acestor legături a contfundamentarea, în termeni algoritmici, a metodeibond-graph de construire a modelelor, care se bazează pe sistematizare a legilor fizicii #rezultată din analogii comportamentale$ şi este capabilă să reducăarbitrarietatea descrierilor #tipică soluţiilor ad&hoc, practicate frecvent în modelare$.
'xpunerea materialului din acest capitol introductiv este structurată pe două secţiuni după urmează(
).). *oncepte fundamentale şi terminologie.).+. Modelarea bazată pe principiile fizicii.
1.1. Concepte fundamentale ! te"m!nolo#!evând o utilizare largă în limbajul cotidian, substantivul model- îşi restrânge sfera noţional
cazul preocupărilor tehnico&inginereşti, concentrându&se pe adecvanţa descrierii modului încomportă diverse entităţi fizice. in această adecvanţă decurge însuşi interesul prezentat de activitamodelare- pentru practică, deoarece numeroase constatări privind detaliile de funcţionare sau soluţ
proiectare pot fi formulate pe baza modelului #ca substitut comportamental al entităţii fizice concret/aragrafele conţinute în secţiunea curentă îşi propun punctarea elementelor definitorii în cons
de modele, urmând ca aceste elemente să fie rafinate, prin abordări de profunzime, pe parcursul înttext al lucrării. ccentul este pus pe specificitatea modelelor de factură matematică, care, prin conţinuinformaţional #atât calitativ cât şi cantitativ$ se dovedesc cele mai performante descrieri investigaţiile din domeniul ingineriei şi al ştiinţelor exacte.
1.1.1. $!%tem ! model/rin conceptul de sistem vom înţelege un obiect fizic #o colecţie de obiecte fizice c
interacţionează$ ale cărui #căror$ proprietăţi intenţionăm sa le studiem. 0 serie din aceste proprietăinvestigate prin intermediul experienţelor efectuate asupra sistemelor1 această manieră de stcaracterizat, pe parcursul timpului, dezvoltarea ştiinţelor naturii, în general. 'xistă totuşi anumite limdestul de severe, pentru cunoaşterea strict empirică #bazată numai pe organizarea şi desfăşexperienţelor$. acă ne referim numai la experienţele costisitoare din punct de vedere financiar, acelea ce comportă acţiuni, manevre periculoase, posibil distructive, este suficient a ne crea o imelocventă privind limitările cunoaşterii strict empirice. "n fine, experienţele sunt imposibil de easupra unor sisteme care nu există încă, aflându&se doar în faza de proiect şi necesitând anali proprietăţi.
"n toate situaţiile amintite anterior, când cunoaşterea bazată pe experienţe nu este posibilă, investigarea proprietăţilor unui sistem se face apel laun model al acestuia. "n general vorbind, modelul unsistem ne permite să răspundem la întrebări legate de comportarea sistemului, fără a trebui să efeexperienţe.
*unoaşterea umană face apel la mai multe tipuri de modele, pe care le vom trece în revistă sîn cele ce urmează.
ngrenarea individului în ansamblul social al vieţii cotidiene se realizează pe baza unormodelementale care oferă individului premise pentru interacţiunea cu alţi indivizi #de exemplu, cunoaştemodului de a reacţiona a diferitor persoane, în anumite situaţii$ sau pentru utilizarea unor obieexemplu, cunoaşterea modului în care răspund la comenzi unele vehicule$.
)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 2/145
*omportarea unui sistem în diferite condiţii poate fi descrisă în cuvinte, cu ajutorul unuimodelverbal #de exemplu, formularea unor principii de funcţionare a unui vehicul căruia i se aplică ancomenzi$. 2rebuie remarcată distincţia dintre un model mental şi unul verbal #de exemplu, o persoancunoaşte pentru sine modul de utilizare a unui vehicul, fără a formula în cuvinte principiile de func pe care se bazează cunoaşterea proprie$. 3n model mental poate fi transformat într&un model verinformaţiile conţinute de către modelul mental sunt exprimate sub formă de unităţi sintactice co#propoziţii, fraze$. *alitatea unui model mental nu este automat transmisă şi modelului verbal, în se
o serie de informaţii disponibile în modelul mental nu se regăsesc în cel verbal #de exemplu, o persofoarte bine să manevreze un vehicul, dar nu este capabilă să furnizeze toate cunoştinţele sale subunor principii de utilizare care să servească şi altor persoane$. 3n model verbal poate fi formalizforma unor reguli If , then sau If , then , else #formalizare ce este exploatată în prezent de către difedomenii ale inteligenţei artificiale$.
3n alt tip de model îl constituiemodelul fizic saumacheta , care îşi propune să reducă la o anumitscară caracteristicile unui sistem dat #de exemplu, macheta unei clădiri, a unui vehicul etc$.
ezvoltarea, de&a lungul timpului, a ştiinţelor fizico&tehnice s&a bazat pemodelul matematic careexprimă sub formă de relaţii matematice legăturile existente între diferite mărimi sau cantităţi ce pinteres pentru funcţionarea sistemului #de exemplu, legile studiate de către anumite domenii ale *omplexitatea unui model matematic este dictată, în general, de acurateţea #precizia$ dorită în descomportării sistemului, în sensul că un model simplu neglijează sau idealizează anumite aspeccomportării.
/e parcursul acestei cărţi vom utiliza numai modele matematice, motiv pentru care se va refrecvent la atributul matematice-, neexistând pericolul creării de confuzii în exprimare. e asemeneterminologie, vom folosi în anumite situaţii substantivul proces- drept sinonim al substantivului siîn sensul de obiect fizic #sau colecţie de obiecte fizice$ precizat la începutul acestui paragraf.
1.1.&. Modele matemat!ce 'n anal!(a a%!%tat) de calculato"Modelul matematic al unui sistem poate fi exploatat prin intermediul unor prelucrări analitic
conduc la formulări sau expresii noi #de exemplu, rezolvarea unor ecuaţii algebrice sau a unor diferenţiale$. ar prelucrările analitice nu sunt întotdeauna posibile şi, în atare situaţii, se apelează la mspecifice calculului numeric. ceste metode sunt, în general, uşor de utilizat într&unul din multiplele sau medii de programare disponibile, în prezent, pe diverse calculatoare. stfel, investigarea unor propale sistemului studiat revine la rezolvarea numerică a unor probleme, procedeele de investigare dnatură fiind referite în totalitatea lor sub denumirea deanaliză asistată de calculator . intre acestea un rolimportant este deţinut de tehnicile de simulare numerică . /recizăm faptul că termenul simulare- poate aveao semnificaţie mai largă #de exemplu, simularea unor defecţiuni pe un anumit echipament$ şi de acadăugat atributul numerică-. 2otuşi, în contextele unde nu există pericol de confuzii, se poate renuacest atribut, subînţelegându&se că activitatea de simulare se desfăşoară cu ajutorul calculatorului.
/rin intermediul simulării numerice, se pot desfăşura experienţe sau experimente de simularnu necesită nici un fel de manipulare fizică a sistemului concret studiat. stfel, experimentele de sim
înlătură limitările experienţelor practice, cu acţiune nemijlocită asupra sistemului fizic, despre cvorbit în paragraful anterior. 2rebuie însă subliniat faptul că informaţiile furnizate de experimensimulare depind decalitatea modelului matematic utilizat, adică de fidelitatea cu care acest model surprinelementele specifice comportării reale. in acest motiv, problema construcţiei unor modele performcât mai precise, deţine o poziţie cheie în dezvoltarea actuală a ştiinţelor fizico&tehnice.
1.1.*. Cla%!f!ca"ea modelelo" matemat!ceModelele matematice pot fi grupate în clase pe baza unor caracteristici care se referă la desc
realizată de model pentru comportarea corectă a sistemului. "n paragraful curent vom prezenta numamodalităţi de clasificare şi anume acelea necesare pentru parcurgerea lucrării de faţă. ceste modalitclasificare induc o terminologie specifică, ce permite diferenţierea unor tipuri fundamentale de mod
ajutorul perechilor de antonime detaliate mai jos(1. Modele deterministe – modele stohastice3n model determinist furnizează o relaţie #relaţii$ între mărimile utilizate pentru descr
matematică. 3n model stohastic furnizează o relaţie #relaţii$ între caracterizări de tip probabilistic
+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 3/145
mărimilor utilizate pentru descrierea matematică. ltfel spus, un model determinist se bazează pe iptotalei certitudini în cunoaşterea mărimilor, în timp ce un model stohastic permite existenţa incertituîn cunoaşterea mărimilor. 5ubliniem faptul că incertitudinile nu se referă la încrederea în corectitudinvaliditatea modelului, ci la maniera în care pot fi cunoscute anumite mărimi.2. Modele statice – modele dinamice
3n model static furnizează o relaţie #relaţii$ între valorile instantanee al mărimilor utilizate pdescrierea matematică. 3n modeldinamic furnizează o relaţie #relaţii$ între valori instantanee şi va
anterioare ale mărimilor utilizate pentru descrierea matematică. "n general, modelele statice sunt ex prin ecuaţii algebrice #de exemplu, relaţia dintre tensiunea la extremităţile unui conductor şi curencirculă prin conductorul respectiv$, iar modelele dinamice sunt exprimate prin ecuaţii diferenţiale, isau integro&diferenţiale #de exemplu, relaţia dintre tensiunea la bornele unui condensator şi curencirculă prin condensatorul respectiv$.3. Modele liniare – modele neliniare
3n model liniar furnizează o relaţie #relaţii$ de tip liniar între mărimile utilizate pentru descmatematică. 3n modelneliniar furnizează o relaţie #relaţii$ de tip neliniar între mărimile utilizate pdescrierea matematică.4. Modele invariante n timp – modele variante n timp
3n model invariant n timp furnizează o relaţie #relaţii$ între mărimile utilizate pentru descrmatematică, în care toţi coeficienţii au valori constante în timp. 3n modelvariant în timp furnizează orelaţie #relaţii$ între mărimile utilizate pentru descrierea matematică, în care unul sau mai mulţi coîşi modifică valoarea dependent de timp #de exemplu, relaţiile dintre tensiunea la bornele unui rezcurentul care circulă prin acesta, în condiţiile modificării în timp a rezistenţei electrice a rezisdatorită creşterii temperaturii$.!. Modele cu parametrii concentra"i – modele cu parametrii distribui"i
3n model cu parametrii concentra"i furnizează o relaţie #relaţii$ între mărimile utilizate pendescrierea matematică, în care toate funcţiile utilizate depind de o singură variabilă independentă, ccontextul acestei lucrări, are semnificaţie temporală. 3zual, astfel de modele sunt formulate cu ajecuaţiilor diferenţiale ordinare sau a sistemelor de ecuaţii diferenţiale ordinare #de exemplu, ecdinamicii punctului material$. 3n model cu parametrii distribui"i furnizează o relaţie #relaţii$ între mărimutilizate pentru descrierea matematică, în care cel puţin o parte din funcţiile utilizate depind #pvariabila independentă cu semnificaţie temporală$ de una sau mai multe variabile independente, decu semnificaţie spaţială. 3zual, astfel de modele sunt formulate cu ajutorul ecuaţiilor diferenţiderivate parţiale sau a sistemelor de ecuaţii diferenţiale cu derivate parţiale #de exemplu, ecuaţia procăldurii într&un corp omogen şi izotrop$.
"n specificarea tipului unui model matematic se pot folosi unul sau mai mulţi termeni din pede antonime prezentate anterior #evident câte un singur termen, din fiecare pereche$. stfel se poatdespre modele statice liniare şi modele statice neliniare, modele dinamice liniare şi modele dinneliniare, modele dinamice liniare invariante în timp şi modele dinamice liniare variante în timp etc. precizarea că în exprimarea curentă, dacă nu există pericolul unor confuzii, unii termeni pot lips
subînţeleşi din contextul discuţiei. e pildă, dacă ne plasăm într&un cadru determinist pentru construmodele, atunci pentru toate tipurile de modele menţionate în fraza de mai sus vom înţelege cdeterministe.
1.&. Modela"ea +a(at) pe p"!nc!p!!le f!(!c!!'dificiul legităţilor fizice, atâtea câte sunt în prezent dezvăluite cunoaşterii umane, este clăd
principiul fundamental al conservării energiei, care, totodată, pune la dispoziţie numeroase relaţii ddin acest principiu #nu toate echivalente cu principiul însuşi$ care sunt frecvent preferate #simplităţii de manevrare$ în elaborarea modelelor. 5ecţiunea de faţă îşi propune o discuţie introduccaracter general, asupra modelării bazate pe relaţii fizice, punând accentul pe necesitatea asigurăriimanieră riguroasă, a compatibilităţii dintre principiul conservării energiei şi uşurinţa de construmanipulare a modelului #destinat fie investigaţiilor analitice, fie prelucrărilor numerice prin simceastă discuţie motivează atenţia acordată, în *apitolul +, studierii unor tipuri de modele, considerreferinţă pentru ştiinţele tehnico&inginereşti, precum şi focalizarea *apitolelor 7 & 8 pe aprofundarfizicii printr&o abordare unificatoare, capabilă să evidenţieze multiple analogii între diverse domeni
7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 4/145
1.&.1. Le#! f!(!ce ! %emnale"n modelare, noţiunea de semnal posedă un conţinut semantic larg, echivalent termenilormărime
sau variabilă , care sunt utilizaţi în descrierea funcţionării unui sistem #indiferent de natura fizică conacestuia$. in punct de vedere matematic, în această lucrare, orice semnal trebuie privit ca o fu
f #t $ ( R 9 R , în care argumentul #variabila independentă$t are semnifica"ie temporală , permiţând, astfel,exprimarea modului în care o anumită cantitate #cu înţeles fizic$ se modifică în timp. şadar, utitermenul de semnal, ne putem referi laevolu"ia n timp a oricărei mărimi fizice, cum ar fi, de exempl
temperatura dintr&o incintă, viteza unui mobil, volumul de fluid dintr&un rezervor, tensiunea la borrezistor electric etc."n funcţie de complexitatea sistemului studiat, nu toate semnalele sunt accesibile măsurători
înregistrărilor, dar imposibilitatea accesului practic la aceste semnale nu înseamnă inexistenţa lor ca ce corespund, la nivel conceptual, caracterizării de mai sus. *u alte cuvinte, chiar dacă constobiectului nu permite efectuarea de măsurători în structura internă, ne putem imagina că, într&o altăconstructivă #cu aceeaşi funcţionalitate$, măsurătorile ar deveni posibile cu un echipament adecvaam putea obţine descrieri de tipul f #t $.
"n studierea dinamicii unui sistem, există două categorii de semnale care sunt nemijlocit accmăsurării sau înregistrării, datorită rolului pe care îl deţin în comportarea sistemului(- semnale de intrare #semnale cauză, sau, simplu,intrări $ care provin din universul exterior sistemului
acţionează asupra acestuia1- semnale de ie#ire #semnale efect, sau, simplu,ie#iri$ care sunt furnizate de sistem către univers
exterior acestuia.*onstrucţia modelelor prin identificare #prezentată sumar în paragraful ).).7$ utilizează
experimentale conţinând rezultatele măsurătorilor efectuatenumai asupra intrărilor şi ieşirilor."n schimb, modelarea bazată pe principiile fizicii #prezentată sumar în paragraful ).).7$ rea
legături între intrări şi ieşiri prin intermediul unor relaţii analitice care includ şi semnalele interstructura sistemului. 2oate semnalele implicate în elaborarea modelului nu trebuie cunoscute experimdar informaţiile de factură cantitativă #valori numerice$ provin, de această dată, de la parametrii conai sistemului. "n condiţiile când pentru parametrii constructivi nu sunt disponibile valori numerice comodelul obţinut realizează doar odescriere calitativă a comportării sistemului. 0 atare descriere estvalabilă pentru o clasă largă de obiecte, cu principii de funcţionare identice, dar cu valori diferite parametrii constructivi ce caracterizează elementele componente.
:elaţiile analitice exprimând legăturile dintre semnale sunt, de fapt, relaţii din diverse domenfizicii aplicate adecvat în contextul problemei de modelare. "ntrebuinţarea concretă şi eficientă a legi depinde de experienţa şi profunzimea abordării dovedită de cel ce construieşte modelul. in nefenu există algoritmi sau reţete detaliate care să ghideze modul de aplicare a legilor fizicii, garantând cmodelului obţinut. "n literatură sunt semnalate erori frecvente care se comit în elaborarea modeleexemplu tipul de erori comentate în #*ellieret al. , );;<$$. intre acestea, cea mai periculoasă #prin însăşsorgintea ei$ o constituie utilizarea unorconsecin"e sau forme derivate ale legilor fundamentale din fizicăcare conduc la o tratare doar parţială sau incompletă a interconexiunilor dintre semnale. 'dificato
acest sens sunt situaţiile generate prin ignorarea principiului conservării energiei #care este universalvalabil în toate domeniile fizicii$ şi folosirea unor relaţii între diferite semnale care nu sunt echiva principiul menţionat #decurg din acesta, fără ca satisfacerea lor să asigure realizarea bilanţului eneeşi nedorite, astfel de abordări defectuoase apar suficient de des, datorându&se, în principal, următtrei motive(- 5emnalele ce pot fi individualizate în funcţionarea sistemului sunt aparent uşor de manevra
intermediul unor relaţii simple, a căror legături #ca şi provenienţă$ cu substratul energetic se piedin vedere1
- 'xploatarea directă a conservării energiei este, în general laborioasă, iar abilităţile dobândi parcursul studierii diverselor capitole din fizică nu creează un punct de vedere global, unitar, la se apeleze comod în practică1
- /ornind de la concepţia sistemică care descrie realităţile fizice prin asigurarea unei cauzalit propagarea semnalelor, de la cauze către efecte, stabilirea lanţului cauzal complet #de la semnaintrare până la semnalele de ieşire$ poate prezenta inadvertenţe, datorate unor elemente componeobiectului pentru care rolurile de cauze şi respectiv de efecte se desemnează eronat.
=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 5/145
1.&.&. Modele cau(ale ! acau(ale"n ştiinţele tehnico&inginereşti, activitatea de modelare s&a bazat, de&a lungul timpului, pmodele
cauzale , care descriu comportarea sistemului printr&o legătură între două categorii de semnale( semintrare #privite drept funcţii a căror dependenţă de timp poate fi precizată analitic, întrucât sunt furniexterior către sistem$ şi semnale de ieşire #privite drept funcţii a căror dependenţă de timp nu este cuanalitic, deoarece sunt produse de sistem, ca rezultat al stimulilor prezentaţi la intrare$. 3n astfel de permite determinarea dependenţei de timp a semnalelor de ieşire fie princalcul analitic , fie prin procedee
numerice #făcându&se apel la simularea într&un mediu soft!are adecvat$.3n avantaj care este intens exploatat la modelele cauzale îl constituie posibilitatea conectărmultor modele de acest tip, pe baza constatării că ieşirea unuia dintre modele constituie intrarea pealt model, sau chiar pentru mai multe modele. *onectările de modele cauzale dau posibilitatea conunor structuri modulare complexe, cărora li se pot asocia reprezentări grafice denumite scheme saudiagrame bloc, deoarece sunt alcătuite din blocuri cauzale, asociate modulelor.
vând în vedere larga răspândire a modelelor cauzale, în studiile teoretice, precum şi în cele b pe simulare, ştiinţele inginereşti operează, actualmente, cu câteva tipuri de descrieri matematice a trintrare&ieşire, acceptate drept standarde pentru activităţile de analiză şi proiectare. in acest capitolul următor este dedicat în totalitate prezentării tipurilor de modele cauzale cu utilizarea cfrecventă, ilustrând prin exemple şi aplicarea lor în practică.
upă cum am semnalat deja la finele paragrafului anterior, în construcţia de modele cauzcompuse din blocuri #submodule$ cauzale, pot interveni erori în atribuirea rolurilor de intrare, reieşire pentru anumite semnale ce servesc conectărilor de blocuri #submodule$. tare erori provin uzfaptul că legile fizicii sunt, în general,descrieri sau modele acauzale , care leagă relaţional două sau maimulte mărimi #semnale$, fără nici o precizare privind cauzalitatea.
2ransformarea unei descrieri acauzale într&un model cauzal #prin asignarea semnificaţiilor dşi efect pentru semnalele implicate în acea descriere$ devine o problemă mai delicată atunci cândcont de bilanţul energetic care asigură funcţionarea obiectului real. "n asemenea situaţii, universul efurnizează sistemului, în fiecare moment, o anumită putere #energie pe unitatea de timp$, care pexprimată în toate domeniile fizicii, ca produs a două semnale pereche, după cum urmează( în electritensiune şi curent, în mecanica mişcării liniare 4 forţă şi viteză, în mecanica mişcării de rotaţie 4 momcuplului şi viteză unghiulară, în fluidică 4 presiune şi debit, în căldură 4 temperatură şi flux al entropalte cuvinte, cauza este puterea însăşi, adică produsul ambelor semnale, iar pericolul unei absuperficiale constă în a desemna drept cauză doar un singur semnal, fără a înţelege exact rolul celudoilea din perechea caracteristică domeniului respectiv./oziţia cea mai recentă adoptată de comunitatea ştiinţifică internaţională faţă de modelarea baza principiile fizice, vizează tocmai eliminarea neajunsurilor semnalate anterior cu privire la utimodelelor cauzale. 5e poate vorbi, în mare, de existenţa a două soluţii, ambele exploatând, într&o pra construirii modelului, descrierile acauzale. /rima soluţie conduce în final la un model cauzal standatipul celor semnalate la începutul acestui paragraf$, compus din blocuri #submodele$ acauzale, cconstruit în deplină concordanţă cu principiul conservării energiei, şi poate face obiectul prelucrări
analitice, cât şi numerice #prin simulare$. doua soluţie a fost concepută anume pentru prelucrări nuşi constituie suportul simulatoarelor de ultima oră, realizate ca medii de programare orientată pe o blocurile #submodelele$ sunt descrise şi conectate în manieră acauzală, revenind în sarcina simul#transparent pentru utilizator$ să asigure cauzalitatea în momentul efectuării calculelor aferente unsau grup de blocuri #*ellieret al ., );;<$.
/e parcursul capitolelor viitoare vom prezenta detaliat prima din cele două soluţii, care preavantajul compatibilităţii totale cu cadrul tradiţional al modelării, bazat pe descrieri cauzale, dar creo viziune de ansamblu în abordarea profundă a fenomenelor fizice.
1.&.,. T"an%fe"ul de ene"#!e ! modela"ea cau(al). Conceptul de %u"%) !deal) de pute"e*onform celor discutate în paragraful anterior, transferul de energie #putere$ dinspre uni
exterior către sistem este cel care asigură funcţionarea sistemului, adică ambele semnale perecdefinesc prin produsul lor puterea într&un domeniu al fizicii, contribuie la realizarea dinamicii sisstfel sistemul trebuie privit ca fiind conectat la o sursă de putere , iar înţelegerea deplină a modului cum stransferă puterea de la sursă către sistem constituie premisa cheie în modelarea cauzală.
>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 6/145
"n toate domeniile fizicii, în bună concordanţă cu exploatarea normală a unei surse reale de putere, sconsidera că aceasta furnizează sistemului puterea necesară funcţionării,impun$nd sistemului unul din celedouă semnale pereche #adică intrare pentru sistem$, iar celălalt semnal perecherezult$nd din consumulconcret de putere al sistemului #adică ieşire pentru sistem$. e exemplu, funcţionarea oricărui echipelectrocasnic se caracterizează prin aceea ca reţeaua electrică #sursa de putere$ impune o tealternativă de ++?@ echipamentului #aşadar cauză$, iar curentul este rezultatul consumului de pcătre echipament #aşadar efect$( zecimi de amperi pentru un bec de veioză, în jur de un amper pentr
de gătit, câţiva amperi pentru un radiator etc. "n exemplul considerat, reţeaua electrică funcţioneasursă ideală de tensiune, atributul ideală- referindu&se la faptul că reţeaua este capabilă să furnizetensiune alternativă de ++?@, orice curent #implicit orice putere$ solicitat de un echipament electr'vident, această comportare desemnată drept ideală se limitează practic, la o gamă de curenţi până în , corespunzătoare consumului de putere al tuturor echipamentelor electrocasnice aflate în funcţiunemoment dat într&un apartament, valoarea maximă a curentului fiind controlată printr&o sigu protecţie #cu rolul de a decupla alimentarea cu energie electrică atunci când se depăşeşte acea vmaximă a curentului$. *onstatăm aşadar că luând în considerare ansamblul format din sursa idetensiune şi un echipament electrocasnic, funcţionarea acestuia din urmă poate fi descrisă printr&ucauzal, având, drept intrare, tensiunea impusă de sursă şi drept ieşire, curentul necesitat de explonormală a echipamentului.0bservaţiile din exemplul anterior cu privire la modul în care un sistem primeşte, de la o sursă, pnecesară funcţionării sunt general valabile astfel încât, în toate domeniile fizicii putem vorbi de surscum ar fi( surse ideale de forţă, surse ideale de cuplu, surse ideale de presiune, surse ideale de tempetc. şadar, având drept bază transferul de energie, construcţia de modele poate fi abordată rigurmanieră cauzală, utilizând metoda bond&graph prezentată în lucrarea de faţă. Metoda porneştdescrierea transferului de putere dintre o sursă ideală #sau mai multe surse ideale$ şi un sistem, i propagă cauzalitatea impusă de tipul sursei #surselor$, din aproape în aproape, pentru fiecare component, ţinând seama de principiul conservării energiei şi de specificul comportării elemconstitutive. ceastă specificitate comportamentală are tot fundament energetic, şi anume modul în cutilizează puterea #disipare, acumulare sau transformare$. 2otodată fundamentul energetic fspecificitatea comportamentală să poată fi tratată unificat, pentru toate domeniile de interes, evidenserie de analogii în exprimarea legilor fizicii care asigură rigurozitatea de fond a metodei bond&grap
&.TIPURI DE MODELE CAU-ALE I PROPRIETĂ/I
0biectivul acestui capitol constă în prezentarea graduală ca nivel de complexitate a unor tipmodele cauzale cu utilizare frecventă în practică. Au se vor lua în discuţie, datorită formulărilor matemai complicate, modelele stohastice şi modele cu parametri distribuiţi #a se vedea clasificarea din pa).).=. al capitolului precedent$. Modul de tratare urmăreşte ca principiu general de expunere generanoţiunilor discutate în etape anterioare, de aşa manieră încât cititorul să realizeze cu uşurinţă exticapacităţii de modelare survenită în urma creşterii gradului de complexitate a descrierii matematicemodelele liniare invariante în timp sunt formulate atât descrieri in domeniul timp, cât şi în domcomplex, folosind metoda operaţională a transformatei Baplace #care se bucură de o utilizare frecvdiverse domenii conexe ingineriei electrice$. 'xemplele practice însoţesc prezentarea fiecărui tip de pentru a&i ilustra utilitatea, dar şi pentru a crea un fundament de sorginte intuitivă în demersul propriu&zis. tragem atenţia că în acest capitol accentul este pus pe tipologia şi proprietăţile modelela ne ocupa de tehnicile de construcţie a acestor modele #care sunt abordate sistematic in capitolele după o consolidare a cunoştinţelor de fizică pe parcursul capitolelor 7 şi =$. 2ot în scopul expdinamicii modelate de diverse tipuri de descrieri matematice, a fost introdusă o ultimă secţiune de
problematicii stabilităţii.*omentarii privind tipurile de modele studiate în acest capitol şi proprietăţile lor pot fi găsnumeroase manuale sau monografii din aria automaticii, care prin excelenţă, este un domeniu de acinginerească preocupat de descrierea riguroasă a realităţii fizico&tehnice. /recizăm, totuşi, că orga
<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 7/145
prezentului capitol nu este specifică lucrărilor de automatică ce, în general, urmăresc nu numai mo proceselor, dar şi utilizarea respectivelor modele în proiectarea unor strategii de conducere #aspect intră în sfera de interes a acestei cărţi$. e aceea structurarea materialului pe secţiuni a urmărit planul jos, orientat, în exclusivitate, pe înţelegerea cât mai detaliată a caracteristicilor comportamentale fiecărei clase de modele(
+.). Modele de tip proporţional.+.+. Modele de tip integrator sau derivator.+.7. Modele liniare de tip ecuaţie diferenţială de ordinul %, cu coeficienţi constanţi.+.=. Modele liniare de tip reprezentare intrare&stare&ieşire.+.>. 'xtinderi ale modelelor liniare intrare&stare&ieşire.+.<. Modele neliniare intrare&stare&ieşire.+.8. Modele de tip diagramă bloc.+.C. Modele variante în timp.+.;. Aoţiuni privind stabilitatea sistemelor.
&.1 Modele de t!p p"opo"0!onal
2ratarea separată pe parcursul acestei secţiuni, a modelelor de tip proporţional, va perminsistăm asupra problematicii cauzalităţii care este comod de investigat datorită simplităţii dematematice. iscuţia face apel la exemple binecunoscute în fizică.
&.1.1. T"an(!0!a cau(al) !nt"a"e !e !"e5istemele cu comportare proporţională pot fi descrise printr&un model matematic de tipecua"ie
algebrică liniară de ordinul % de forma(?$,#$# ≠= ct uct % , #+.).)$
undeu#t $ notează mărimea #variabila sau semnalul$ cauză #sau de intrare$, iar %#t $ notează mărimea efect#sau de ieşire$. enumirea de model de tip proporţional- se datorează faptului că la orice moment de t
valoarea instantanee a mărimii efect %#t $ poate fi determinată din valoarea instantanee a mărimii cauzău#t $ prin multiplicare cu factorul #sau coeficientul$ de proporţionalitatec ≠ ?. 6actorul de proporţionalitatetrebuie privit drept o constantă ce caracterizează funcţionarea sistemului fizic modelat prin interecuaţiei #+.).)$. 3nitatea de măsură prin care se exprimă valoarea luic ≠ ? este corelată cu unităţile demăsură ale semnaleloru#t $ şi %#t $.
&.1.&. Comenta"!! a%up"a cau(al!t)0!! unu! model de t!p p"opo"0!onal"n sens larg, ecuaţia #+.).)$ poate fi privită sub forma implicită(
?,?$#$# ≠=− ct uct % , #+.).+$unde u#t $ şi %#t $ sunt două mărimi fizice ale căror valori instantanee sunt proporţionale prin intermfactoruluic ≠ ?. 3na dintre aceste două mărimi este furnizată din exterior către sistem şi reprezintămărimeacauză , iar cealaltă este furnizată de sistem către exterior şi reprezintămărimea efect . eoarece în exprimareaimplicită #+.).+$ nu se precizează mărimea cauză, se spune că ecuaţia #+.).+$ constituie o formă acauzală amodelului de tip proporţional. /rin convenţie, modul de scriere folosit în #+.).).$ reprezintă o formă cauzală amodelului de tip proporţional şi semnifică faptul că semnalul din membrul drept, adicău#t $, este intrare, iarsemnalul din membrul stâng, adică %#t $, este ieşire. Menţionăm că, tot prin convenţie, notaţiau#t $ desemneazăuzual un semnal cauză, iar notaţia %#t $ desemnează uzual un semnal efect. #*onvenţiile la care se face referiresus sunt specifice ingineriei sistemelor care operează numai cu descrieri cauzale, precizând ferm mărimile dşi respectiv de ieşire ale modelelor.$
"n finalul acestor comentarii, subliniem ideea că în cazul multor sisteme fizice forma acauzade ecuaţia #+.).+$ poate fi utilizată atât cu cauzalitateu → %, cât şi cu cauzalitate % → u. semenea situaţiisunt specifice sistemelor care disipă energie, semnaleleu#t $ şi %#t $ fiind caracterizate prin aceea că produslor, u#t $ %#t $, are semnificaţie de putere. tragem însă atenţia asupra faptului că pentru unele sisteme fiz pot construi numai modele proporţionale cauzale, întrucât orientarea transferului intrare&ieşire este
8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 8/145
de însăşi funcţionarea obiectului. Aumeroase legi din fizică sunt formulate ca model de tip proporţional, făcând apel la o exp
acauzală de forma #+.).+$. 0dată ce una din cele două mărimi din #+.).+$ este considerată cauză, joacă rolul de efect. 'xemplele de mai jos punctează aceste aspecte pentru câteva tipuri de sisteme con binecunoscute cititorului în urma studierii disciplinei 6izică-. 2oate sistemele luate în discuţie aucaracteristică comună faptul că, din punct de vedere energetic, disipă o anumită putere, egală num produsul celor două mărimi #semnale$ din descrierea #+.).+$.
E2emplul &.1.1.
5e consideră unrezistor electric având rezistenţa & DΩE, parcurs de un curenti#t $ D E, între ale căruiextremităţi există diferenţa de potenţial #tensiunea$u#t $ D@E, conform fig. +.).). Modelul de tip proporţiîn forma acauzală este dat de legea lui 0hm(
?$#$# =− t &it u ,din care se poate obţine forma cauzală rezistivă #rolul constantei este jucat de o rezistenţă$(
$#$# t &it u =
şi forma cauzală conductivă #rolul constantei este jucat de o conductanţă( ) $#)$# t u &t i = .
'xprimările cauzale evidenţiate mai sus trebuie privite în corelare maniera de furnizare a energiei electrice utilizate de rezistor. 6orma cauzală rezistivă presupune că re primeşte energia de la o sursă ideală de curent care impune i#t $ prin rezistor, iaru#t $ rezultă la bornelerezistorului. 6orma cauzală conductivă presupune că rezistorul primeşte energia de la o sursă ideală detensiune careimpune u#t $ la bornele rezistorului,rezult$nd i#t $ care parcurge rezistorul.
E2emplul &.1.&.
5e consideră un amortizor cu frecare vâscoasă, conform fig. +.).+. supra acestuia se exercită ' #t $ DAE, iar extremitatea sa liberă se deplasează cu vitezav#t $ DmFsE. Mişcarea extremităţii libere poadescrisă cu un model de tip proporţional în forma acauzală
,?$#$# =− t vt ' γ
unde γ DAsFmE notează coeficientul de amortizare vâscoasă.exprimarea acauzală se poate obţine forma cauzală rezistivă #rolulconstantei de proporţionalitate fiind jucat de coeficientul de amortivâscoasă$(
$#$# t vt ' γ =
şi formacauzală conductivă #rolul constantei de proporţionalitate fiin jucat de inversul coeficientului de amortizare vâscoasă$(
( ) $#)$# t ' t v γ = .'xprimările cauzale trebuie privite în corelare cu maniera de furnizare a energiei mecanice uti
pentru deplasarea extremităţii libere a amortizorului. 6orma cauzală rezistivă presupune că energfurnizată de o sursă ideală de viteză care impunev#t $ drept cauză, iar ' #t $ rezultă drept efect. 6orma cauzalconductivă presupune că energia este furnizată de o sursă ideală de for"ă care impune ' #t $ drept cauză, iarv#t $ rezultă drept efect.
&.&. Modele de t!p !nte#"ato" %au de"!3ato"
C
u#t $ D@E
i#t $ D E & D E
4!#. &.1.1. :ezistor electric pentrucare se utilizează un model
ro or ional
' #t $ DAE
v #t $ DmFsE
γ DAsFmE
4!#. &.1.& mortizor mecanic cu frecarevâscoasă pentru care se utilizează un
model proporţional

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 9/145
3n număr mare de sisteme fizice, de naturi diferite sunt descrise prin legi care evidenţiază ledintre o mărime fizică derivată şi o altă mărime fizică nederivată . %nterpretarea tranziţiei cauzaintrare&ieşire pentru o astfel de lege se poate face apelând la modele de tip integrator sau de tip d/rin parcurgerea acestei secţiuni, cititorului i se crează posibilitatea unui studiu comparativ al aplicabcelor două tipuri de modele #integrator sau derivator$ prin referiri la funcţionarea unor sisteme fiziceîntâlnite în practica tehnico&inginerească.
&.&.1. T"an(!0!a cau(al) !nt"a"e !e !"e pent"u modele de t!p !nte#"ato"Modele de tip integrator sunt descrise de o ecuaţie diferenţială având forma particulară(?$?#$#$# ? ≠== a ( % %)t ut %a , #+.+.)$
undeu#t $ este o funcţie continuă, notândmărimea #variabila sau semnalul $cauză #saude intrare $, iar %#t $noteazămărimea efect #saude ie#ire $. enumirea Gmodel de tip integratorG se datorează faptului că %#t $ poate fi exprimat drept(
$.?#$#$F)#$#?
%d uat % t += ∫ τ τ #+.+.+$
'xprimarea integrală #+.+.+$ pune în evidenţă func"ionarea de tip acumulativ în raport cu mărimea de intrareu#t $, în sensul că integrarea utilizează toate valorile semnaluluiu de pe întreg intervalul D?,t E.
6orma integrală #+.+.+$ posedă avantajul că poate fi utilizată şi în cazul mai general cându#t $ estecontinuă pe por"iuni #cu discontinuităţi de speţa întâia$. e exemplu dacău#t $ este definită cu odiscontinuitate de speţa întâia înt ) prin(
≤<≤
=,$ ,#
,?$ ,#$#
)+
))
t t t u
t t t ut u #+.+.7$
undeu)#t $ şiu+#t $ sunt funcţii continue, atunci, conform relaţiei #+.+.+$, se poate scrie
( ) ≤++
<≤+=
∫ ∫
∫.$ ,?#$#$#$F)#
,?$ ,?#$#$F)#$#
)? +)
? ))
))
t t %d ud ua
t t %d uat %
t t t
t
τ τ τ τ
τ τ
#+.+.=$
'ste evident că acest exemplu poate fi formulat şi în spiritul ecuaţiei #+.+.)$, definind modelul astfel( pentru )? t t <≤ , modelul este( ?) $?#$1#$# % %t ut %a == 1
pentru t t ≤) , modelul este $#l i m$#$ 1#$#
))
)+ t %t %t ut %at t t t
<→==
*u alte cuvinte, condiţia finală de pe intervalul D?,t )$, exprimată prin$#l i m$#
))
) t %t %
t t t t
<→
=devine condiţie iniţială
pentru intervalul Dt ) , ∞$.
"n final, facem precizarea că majoritatea textelor inginereşti consideră drept subînţeleasă posibca u#t $ să prezinte discontinuităţi de speţa întâia în condiţiile exprimării de forma #+.+.)$ #fără a maexplicaţiile anterioare privitoare la transformarea condiţiei finale în condiţie iniţială$.
;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 10/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 11/145
$#)
$# s, as
s+ = , #+.+.;$unde funcţia raţională
as s.
)$# = #+.+.)?$
în variabila independentă s permite definirea func"iei de transfer asociate modelului de tip integratorceastă denumire pentru # s$ este justificată de faptul că face posibilă scrierea unei relaţii foarte sim
+ # s$ H # s$, # s$, între imaginea semnalului de intrare, # s$ şi imaginea semnalului de ieşire+ # s$, pentrusituaţia când %#?$ H ?, adică în regim forţat.
&.&.,. T"an(!0!a cau(al) !nt"a"e !e !"e pent"u modele de t!p de"!3ato"Modelele de tip derivator sunt descrise de o ecuaţie liniară de forma(
,?$,#$# ≠= bt ubt % #+.+.))$unde u#t $ este o funcţie netedă #de clasăC ) cu derivata de ordinul % continuă$ notândvariabila #sau
semnalul $cauză #saude intrare $, iar %#t $ noteazăvariabila #sau semnalul $efect #saude ie#ire $.6acem precizarea că în unele texte inginereşti exprimarea #+.+.))$ este utilizată şi în sensu
larg cându#t $ este derivabilă pe porţiuni, rezultând că %#t $ va avea un număr de puncte de discontinuitade speţa întâia #corespunzătoare punctelor unghiulare ale luiu#t $$. e asemenea, modelul #+.+.))$ poate ffolosit şi în cazul când semnalul de intrareu#t $ prezintă discontinuităţi de primă speţă, dar, în acest cderivarea trebuie înţeleasă în sensul distribu"iilor #Kecs, );C)$.
'xprimarea derivativă #+.+.))$ pune în evidenţă func"ionarea de tip anticipativ în raport cumărimea de intrareu#t $, în sensul că definiţia derivatei ca limită a raportului increme
( ) $#$#$#lim$# ????
t t t ut ut
t ut
−−=→ presupune cunoaşterea valorilor luiu#t $ şi la momente de timp
caracterizate print L t ?. *u alte cuvinte, calculul lui $# ?t u face apel la valori ale semnaluluiu#t$ care nu pot fi cunoscute la momentul curentt ?, decât dacă se acceptă ipoteza anticipării acestor valori.
&.&.*. De%c"!e"ea ope"a0!onal) a%oc!at) modelulu! de t!p de"!3ato"/resupunând că în ecuaţia #+.+.))$ funcţiau#t $ este de clasăC ) şi satisface condiţiau#?$H?, prin
aplicarea transformării *aplace #vezi nexa %$imaginea semnalului de ieşire LI %#t $JH+ # s$ poate fiexprimată în funcţie deimaginea semnalului de intrareL Iu#t $JH, # s$, sub forma(
$#$# sbs, s+ = . #+.+.)+$:elaţia #+.+.)+$ furnizează o descriere opera"ională( sau o descriere n domeniul comple a transferuluiintrare&ieşire pentru modelul de tip derivator. ceastă terminologie punctează faptul că vaindependentă s din ecuaţia #+.+.)+$ nu mai are semnifica"ia temporală a variabilei independentet dinecuaţiile #+.+.))$, ecuaţie care constituie odescriere n domeniul timp a transferului intrare&ieşire pentrmodelul de tip derivator. *u alte cuvinte, descrierea operaţională furnizează conexiuni între imasemnalelor #prin transformată Baplace$ şi nu conexiuni între semnalele propriu&zise #ca funcţii detemporalăt $. 6uncţia
# s$ Hb s #+.+.)7$în variabila independentă s permite definirea func"iei de transfer asociate modelului de tip derivator.
ceastă denumire pentru # s$ este justificată de faptul că face posibilă scrierea unei relaţii fosimple,+ # s$H # s$, # s$, între imaginea semnalului de intrare, # s$ şi imaginea semnalului de ieşire+ # s$.
'xpresia #+.+.)7$ a funcţiei de transfer corespunzătoare modelului de tip derivator îşi păst
valabilitatea şi în cazul când ?$?# ≠u , dar?$#l i m$?#
??
==−
<→
t uu
t t , adicău#t $ prezintă o discontinuitate de prim
speţă în t H ?. "n această situaţie, transformata Baplace se aplică ecuaţiei #+.+.))$ în sensul distribuţiilor #Kecs, );C)$.
))

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 12/145
&.&.5. Comenta"!! a%up"a cau(al!t)0!! modelelo" de t!p !nte#"ato" %au de"!3ato"3n număr mare de legi întâlnite în diverse domenii ale fizicii posedă exprimări în forma implic
?,?$#$# ≠=− / t 0t v/ , #+.+.)=$undev#t $ şi0 #t $ sunt douămărimi #variabile sau semnale $ dependente, ca evoluţie în timp, una de cealalin punctul de vedere al construcţiei unui model, una din cele două mărimi trebuie privită dreptcauză , iarcealaltă dreptefect . "n unele situaţii, modul de funcţionare al procesului fizic modelat, dă informaţii p privind care din cele două variabilev#t $ sau0 #t $ reprezintă cauza şi care efectul. 'xistă însă numeroassituaţii când rămâne la latitudinea modelatoruluiasignarea cauzalită"ii , adică desemnarea variabilei cu rode cauză şi a celei cu rol de efect. @or exista atunci două opţiuni(#i$ 0 #t $ cauză şiv#t $ efect, caz când modelul este de tip integrator, cu exprimarea de forma #+.+.
#+.+.+$.#ii$ v#t $ cauză şi 0 #t $ efect, caz când modelul este de tip derivator, cu exprimarea de forma #+.+.))$.
"n condiţiile când se utilizează opţiunea #i$, se spune că legea #+.+.)=$ este exprimată încauzalitate detip integral , sau, mai simplu, încauzalitate integrală . "n condiţiile când se utilizează opţiunea #ii$, se spune călegea #+.+.)=$ este exprimată încauzalitate de tip derivativ sau mai simplu, încauzalitate derivativă . "n bazacelor discutate în paragrafele precedente, se preferă #ori de câte ori este posibil$ exprimarea legii #+.+.)=
cauzalitate integrală, datorită următoarelor aspecte #anterior deja semnalate pentru fiecare tip de separat$(*auzalitatea integrală evidenţiază o funcţionare de tip acumulativ care este în deplină concordasensul fizic intuitiv, spre deosebire de caracterul anticipativ al exprimării cauzale derivative.'xprimarea în cauzalitate integrală, adică forma #+.+.)$ sau #+.+.+$, impune mai puţine restrfactură matematică asupra mărimii de intrare #funcţie continuă pe porţiuni$, spre deosebexprimarea #+.+.))$ de tip derivativ #care necesită ca mărimea de intrare să fie o funcţie netedă3n alt motiv #de altfel, deosebit de important$ pentru care se preferă utilizarea cauzalităţii inte
constituie faptul căn simulare , calcularea mărimii de ieşire #prin metode aproximative, specifice ananumerice & adică nu analitic, exact $ se realizează cu precizie mult mai bună pentru o descriere de forma#+.+.)$ sau #+.+.+$, decât pentru o descriere de forma #+.+.))$.
"ncheiem această secţiune prin a exemplifica aspectele discutate pentru câteva tipuri de siconcrete, binecunoscute cititorului în urma studierii disciplinei 6izică-. 2oate sistemele luate în discudrept caracteristică comună faptul că, din punct de vedere energetic, procesează o anumită putere , egalănumeric cu produsul semnalelor #variabilelor$v#t $ şi0 #t $ din descrierea acauzală #+.+.)=$
E2emplul &.&.1.
5e consideră un condensator electric având capacitatea e D6E, parcurs de curentuli#t $ D E, între alecărui terminale există diferenţa de potenţial #tensiunea$u#t $ D@E, conform fig. +.+.). Modelul în exprimacauzală #+.+.)=$ este de forma(
?$#$# =− t it u1
e ,din care se poate obţine modelul de tip integrator #+.+.)$($#$# t it u e = ,
în care i#t $ este intrare, iaru#t $ ieşire şi modelul de tipderivator #+.+.))$(
$#$# t u t i e = ,în careu#t $ este intrare, iari#t $ ieşire.
'xprimările cauzale evidenţiate mai sus trebuie privite în corelare cu maniera de furnizare a en
electrice utilizate de condensator. Modelul de tip integrator presupune că energia este primită de la ideală de curent, care impunei#t $ prin condensator, iaru#t $ rezultă între terminalele condensatorului confo#+.+.+$. Modelul de tip derivator presupune că energia este primită de la o sursă ideală de tensiuimpuneu#t $ între terminalele condensatorului, rezultândi#t $.
)+
i#t $ D E e D6E
u#t $ D@E
4!#. &.&.1. *ondensator electric pentru care seutilizează o descriere de forma #+.+.)=$

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 13/145
E2emplul &.&.&.
3tilizăm condensatorul electric din exemplul +.+.) conectat la o sursă ideală de curenti#t $, conformcircuitului din fig. +.+.+. Ba momentul iniţial, tensiunea pe condensator esteu#?$ ≠ ?.
"n baza celor discutate în 'xemplul +.+.), funcţionarea condensatorului va fi descrisă de un motip integrator, cui#t $ mărime de intrare iar, din relaţia +.+.+ va rezulta mărimea de ieşire(
$?#$#)
$# ? ud i1 t u t
e += ∫ τ τ ,care defineşterăspunsul complet . cesta poate fi privit prin prisma suprapunerii efectelor descrisă de o egalitate de for#+.+.8$(
$#$#$# t ut ut u l f += ,considerând că răspunsul forţat(
∫ = t
e f d i
1 t u
?$#
)$# τ τ
se obţine dintr&un experiment cu acelaşi curenti#t $ şi condensatorul neîncărcat iniţial ?$?# ≡u , iarrăspunsul liber
$?#$# ut u l =
se obţine dintr&un experiment cu condensatorul încărcat cu aceeaşi tensiune iniţială?$?# ≠u şi curentul nul?$# ≡t i pe întreg intervalul de observaţie."n descrierea operaţională, comportarea de regim forţat este caracterizată prin func"ia de transfer
s1 s.
e
)$# = ,
care leagă $#$#de$#$# s, t u s I t i == LL prin relaţia(
$#)
$# s I s1
s, e
= .
5e constată imediat că funcţia de transfer are semnificaţia unei impedanţe complexe $#)$# s1 s 2 e= asociate condensatorului, fapt care este binecunoscut cititorului familiarizat cu elementele de circuitelor electrice.
E2emplul &.&.,.
Ae plasăm în contextul 'xemplului +.+.+ cu singura deosebire că ini
condensatorul nu este încărcat, ?$?# =u . vând în vedere simplitatealegăturii dintre mărimea de intrarei#t $ şi mărimea de ieşireu#t $, existenţaunei reprezentări grafice pentrui#t $ permite construcţia grafică a luiu#t $într&o manieră directă, care exploatează semnificaţia geometrică de integratei.
%lustrăm procesul de construcţie grafică a luiu#t $ în fig. +.+.7#b$ pornind de la graficul luii#t $ dat în fig. +.+.7#a$. Marcarea axelor graficele din fig. +.+.7 este generică, fără a preciza exact unităţilemăsură.
"n intervalul de timp D?, )?$,u#t $ va fi o rampă cu panta )F e, astfel
încâtu#)?$
H
)?F e. /e intervalul de timp D)?, )>$,u#t $ va fi o rampă cu panta 47F e, astfel încâtu#)>$ H 4>F e. /entru ?$#,)> ≡≥ t it şi, înconsecinţă,u#t $ H 4>F e, condensatorul păstrând tensiunea existentă l
)7
i#t $ 1 e
u#t $
4!#. &.&.&. :eprezentarea grafică acircuitului electric utilizat în
'xemplul +.+.+
)
47
)? )>
D
D
D
$
$
i#t $
t
)?F1 e
4>F1 e
)?
)>
u#t $
t
6+7
6a7
?
?
4!#. &.&.,. *omportarea de regimforţat a sistemului considerat în
exemplul +.+.76a7mărimea de intrarei#t $6+7mărimea de ieşireu#t $

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 14/145
momentul anulării curentului prin el. 5e constată că punctelor de discontinuitate ale mărimii de intrai#t $,le corespund puncte unghiulare în evoluţia mărimii de ieşireu#t $.
5imilar modului în care a fost trasat graficul răspunsului forţat din fig. +.+.7#b$, se poate congraficul răspunsului complet cu ?$?# ≠u , care, de fapt, revine la translarea pe verticală a graficului u#t $ cu valoarea constantă ?$?# ≠u .
E2emplul &.&.*.
3tilizăm condensatorul electric din 'xemplul +.+.) conectat la o sursă ideală de tensiuneu#t $, conformcircuitului din fig. +.+.=. Ba momentul iniţial, condensatorul nu este încărcat.
'ste evident faptul că pe orice interval de timp se efectuează observarea, tensiunea pe condensafi identică cu cea a sursei, adicău#t $.
"n cazul cându#t $ este o funcţie netedă # )$# Ct u $ pentru intervalulde timp considerat, în baza celor discutate în 'xemplul +.+funcţionarea condensatorului va fi descrisă de un model de derivator, cuu#t $ mărime de intrare iar drept mărime de ieşire rezultâcurentul(
$#$# t u1 t ie
=."n descriere operaţională, pentru ?$?# =u , putem scrie(
$#$#$# s, s1 s I e= ,
de unde rezultă că funcţia de transfer s1 s. e=$# are semnificaţia uneiadmitan"e opera"ionale , legând $#$#de$#$# t u s, t i s I LL == .
0bservăm că modelul de tip derivator poate fi folosit şi în cazul mai relaxat cându#t $ estecontinuăşi derivabilă pe por"iuni pe intervalul de timp afectat observaţiei. e exemplu, dacă sursa ideală tensiune ar furniza semnalulu#t $, reprezentat grafic în fig. +.+.7#b$, atunci, pentrui#t $ ca mărime de ieşire,ar rezulta evoluţia trasată grafic în fig. +.+.7#a$, cu singura deosebire că nu vom putea preciza
numerice pentrui#t $ în punctelet H )? şi t H )> #adică, pentrumomentele de timp corespunzătoare punctelor unghiulare ale intru#t $$. "n această situaţie, se poate folosi un procedeu de trasare graa mărimii de ieşirei#t $, pornind de la graficul mărimii de intrareu#t $,care exploatează semnificaţia derivatei $#t u ca pantă a tangentei lagraficul luiu#t $."n cazul când mărimea de intrareu#t $ prezintă discontinuităţi de speţaîntâia ca în fig. +.+.>#a$, modelul de tip derivator rămâne valabspaţiul distribuţiilor şi va furniza mărimea de ieşirei#t $ din fig.+.+.>#b$ care conţine două impulsuri delta 4 irac lat H > şi respectivt H )>. Marcarea axelor în cele două grafice din fig. +.+.> egenerică, fără a preciza exact unităţile de măsură.5e constată că informaţiile furnizate de model sunt în buconcordanţă cu desfăşurarea unui experiment practic. /resupunând prin sursa ideală de tensiune am crea, între terminalecondensatorului, tensiunea reprezentată grafic în fig. +.+.>#a$, experimentul nu este distructiv se va constata un şpiţ- pozitiv curent la t H > #corespunzător ncărcării instantanee acondensatorului$ şi un şpiţ- negativ de curent lat H )>
#corespunzător descărcării instantanee a condensatorului$, în rest, curentul prin condensator fi#deoarece tensiunile pe sursă şi condensator sunt identice$. 'ste evident faptul că, în practică, neocu elemente ideale de circuit, vor exista unele rezistenţe parazite, care vor face ca cele două şpiţuaibă amplitudini finite #dar suficient de mari, încât, din punct de vedere practic, să poată afecta intecomponentelor$.
)=
u#t $ e
i#t $
4!#. &.&.*. :eprezentarea grafică acircuitului electric utilizat în'xemplul +.+.=
)
)? )>D$
u#t $
t
e #t 4>$
i#t $
6+7
6a7>
D $
>)>
4 * e #t 4)>$
4!#. &.&.5. *omportarea circuitului detip derivator pentru circuitul electric
din 'xemplul +.+.=6a7mărimea de intrareu#t $6+7mărimea de ieşirei#t $

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 15/145
"n urma parcurgerii 'xemplelor +.+.) 4 +.+.=, cititorul ce posedă bune cunoştinţe de 6izică poate formula o problematică similară pentru sisteme neelectrice, cu o comportare perfect acondensatorului, ca, de exemplu(
pentru un resort elastic, cu una dintre extremităţi mobile 4 studierea legăturii dintre extremităţii mobile şi forţa elastică din resort. pentru un rezervor cu secţiune circulară, cu alimentare la baza rezervorului 4 studierea ledintre debitul de alimentare şi presiunea la baza rezervorului, în condiţii de curgere laminară.
E2emplul &.&.5.
5e consideră un punct material de masăm DNgE, care se deplasează liniar, fără frecare, conform+.+.<. eplasarea se caracterizează prin vitezav#t $ şi forţa ' #t $.
Modelul în exprimare acauzală #+.+.)=$ este de forma(?$#$# =− t ' t vm ,
din care se poate obţine modelul de tip integrator #+.+.)$($#$# t ' t vm = ,
în care ' #t $ este intrare, iarv#t $ ieşire şi modelul de tip derivato
#+.+.))$($#$# t vmt ' = ,
în carev#t $ este intrare, iar ' #t $ ieşire.'xprimările cauzale evidenţiate mai sus trebuie privite în corelare cu maniera de furnizare a en
mecanice utilizate în deplasare. Modelul de tip integrator presupune că energia este primită de la o sursăideală de for"ă , care impune forţa ' #t $, iarv#t $ rezultă ca viteză de deplasare. Modelul de tip derivato presupune că energia este primită de la o sursă ideală de viteză , careimpune vitezav#t $,rezult$nd forţa ' #t $.
/ornind de la acest ultim exemplu de sorginte mecanică, similar la nivel conceptual 'xempl+.+.), cititorul poate relua,mutatis mutandis , aspectele detaliate în 'xemplele +.+.+, +.+.7 şi +.+.=. asemenea, este invitat să transpună întreaga problematică pentru studierea legăturii dintre curentul ele parcurge o bobină fără miez şi tensiunea la bornele acesteia.
&.,. Modele l!n!a"e de t!p ecua0!e d!fe"en0!al) de o"d!nul I8 cu coef!c!en0! con
0 serie de sisteme fizice întâlnite frecvent în practică prezintă structuri simple, a căror funcţ poate fi modelată prin ecuaţii diferenţiale de ordinul %, liniare, cu coeficienţi constanţi. stfel de permit analiza detaliată a dinamicii sistemului fizic atât sub raport calitativ #specificitatea comnedepinzând de valori numerice concrete$, cât si din punct de vedere cantitativ #descrierea evoluinformaţii numerice cât mai precise, făcând apel, eventual şi la studii de simulare$. 5implitatea structimplicit a modelelor constituie o premiză valoroasă pentru crearea de conexiuni cu suportul infenomenologic, ce poate fi dezvoltat cu uşurinţă pe baza cunoştinţelor dobândite prin studierea difcapitole ale fizicii. in aceste raţiuni şi, totodată, în perspectiva introducerii în viitor a unor modelcomplexe #care generalizează problematica abordată în secţiunea curentă$, intenţionăm să oferim oteoretică cât mai completă, însoţită de numeroase exemple #capabile să ilustreze aspectele comportacele mai relevante$.
&.,.1. T"an(!0!a cau(al) !nt"a"e !e !"e3n model de acest tip este definit printr&o ecuaţie diferenţială de forma(
???)?) $#,?,?,$#$#$# %t %aat ut %at %a =>>=+ , #+.7.)$
undeu#t $ este o funcţie continuă, notândmărimea #variabila sau semnalul $cauză #sau deintrare $, iar %#t $noteazămărimea efect #sau deie#ire $. /entru un semnal de intrareu#t $ precizat şi o condiţie iniţială %#t ?$ H
%?, semnalul de ieşire este dat de soluţia problemei *auchO asociate ecuaţiei diferenţiale #+.7.)$(
)>
v#t $ DmFsE ' #t $ DAE
m DNgE
4!#. &.&.9. /unct material în mişcare pentru care se utilizează o descriere de
forma #+.+.)=$

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 16/145
$,D,$#)
$#$# ?)
$#
?
$#
?
)
??
)
?
∞+= ∫ −−−−
t t d4 ua
et %et % t
t
4 t aa
t t aa
τ . #+.7.+$
5emnificaţia condiţiei de pozitivitate impusă coeficienţilora ), şi a ? va fi discutată în secţiunea +.;.care încheie acest capitol, întrucât, până la acel punct, cititorul va căpăta o sumă de cunoştinţe ce permite o viziune de ansamblu. "n cazuri practice, semnalul de intrareu#t $ poate prezenta salturi deamplitudine finită #adică, din punct de vedere matematic, discontinuităţi de speţa întâia$. tare salsunt resimţite în semnalul de ieşire %#t $, datorită inerţiei manifestate de sistemul fizic, semnalul de ie păstrând valoarea din momentul premergător saltului. ceastă constatare de sorginte experime permite formularea următoarei ipoteze de continuitate asupra semnalului de ieşire %#t $ în situaţia cându#t $suferă un salt. acău#t $ este definită cu o discontinuitate de speţa întâia înt ) prin(
≤<≤
=,,$#
,$ ,#$#
)+
)?)
t t t u
t t t t ut u
undeu)#t $ şiu+#t $ sunt funcţii continue pe intervalele considerate, atunci, %#t $ este continuă la stânga înt ),adică putem scrie egalitatea(
$#l i m$#
))
) t %t %
t t t t
<→
=
stfel, condiţia impusă neomogenităţiiu#t $ în teoria ecuaţiilor diferenţiale poate fi relaxată, în sencă este suficient cau#t $ să fiecontinuă pe por"iuni , cu discontinuităţi de speţa întâia. :elaxarea considera
dă posibilitatea construirii unui model pentru$,D
? ∞t t
, în ciuda discontinuităţii luiu#t $, sub forma( pentru )? t t t <≤ , modelul este( ??)?) $#,$#$#$# %t %t ut %at %a ==+ ,
pentru t t ≤) , modelul este($#l i m$#,$#$#$#
))
)+?) t %t %t ut %at %a
t t t t
<→
==+
*u alte cuvinte, în baza ipotezei de continuitate a semnalului %#t $ înt ), condiţia finală de pe intervalul
D?,t )$, exprimată prin$#l i m$#
))
) t %t %
t t t t
<→
=, devine condiţie iniţială pentru intervalul Dt ) , ∞$.
6acem precizarea că majoritatea textelor inginereşti consideră drept subînţeleasă posibilitatea u#t $să prezinte discontinuităţi de speţa întâia în condiţiile exprimării de forma #+.7.)$ #fără a mai explicaţiile anterioare privitoare la transformarea condiţiei finale în condiţie iniţială$.
in punct de vedere energetic, un model de forma #+.7.)$ descrie în general, comportarea unui fizic alcătuit dintr&un element careacumulează energie #cu o comportare de tipintegrator - vezi secţiunea+.+ a acestui capitol$ şi un element caredisipă energie #cu o comportare de tip propor"ional 4 vezi secţiunea+.) a acestui capitol$. 'lementul integrator nu îşi poate modifica energia acumulată prin salt şi astasigurăcondi"ia de continuitate presupusă pentru %#t $ în cele prezentate mai sus.
E2emplul &.,.1.
)<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 17/145
5e consideră un sistem mecanic alcătuit dintr&un resort cu constanta de elasticitate/ e, conectat în paralel cu un amortizor cu frecare vâscoasă, având coeficientulγ , conform fig. +.7.)
"n punctul se aplică o forţă ' #t $, care se modifică în timpdupă o lege precizată. 5ub acţiunea lui ' #t $, punctul îşi modifică poziţia #t $ măsurată în raport cu punctul fix 0 #ce corespunsituaţiei când arcul nu este tensionat ?$# ≡t ' şi resortul estenedeformat$. 5ensul pozitiv al axei 0x este dat de alungirresortului #adică spre dreapta, corespunzând săgeţii asociate
' #t $$.*onstruirea unui model cauzal având drept intrare forţa ' #t $ şi
drept ieşire deplasarea #t $, se bazează pe exploatarea egalităţii($,,D$,#$#$# ? ∞=+ t t t ' t ' t ' ar
în care $#$# t / t ' er = este forţa elastică corespunzătoare deformării resortului, iar =$#t ' a $#$# t -t v γ γ =
este forţa elastică corespunzătoare amortizorului. "nlocuind aceste expresii, se obţine ecuaţia diferenţi?? $#$,#$#$# t t ' t / t e ==+γ ,
care este de forma #+.7.)$, condiţia iniţială ? având semnificaţia poziţiei punctului în momentult ?#considerat drept moment de început pentru modelarea evoluţiei sistemului mecanic$.
3tilizând modelul construit şi făcând apel la exprimarea analitică #+.7.+$ a soluţiei ediferenţiale, intrăm în posesia unei dependenţe a deplasării punctului în raport cu timpul de forma(
∫ ∞+=−−−− t
t
t /
t t /
t t d ' et et ee
?
?$,,D,$#
)$#$# ?
$#
?
$#τ τ
γ
τ γ γ
care evidenţiază rolul următoarelor elemente(- parametrii fizici ai sistemului mecanic #constantele de material/ e şi γ $- deplasarea iniţiala a punctului # #t ?$$- forţa ce acţionează asupra punctului # ' #t $$.
&.,.&. Compo"ta"e de "e#!m l!+e" ! de "e#!m fo"0at5oluţia #+.7.+$ a ecuaţiei diferenţiale #+.7.)$ poate fi descompusă sub forma(
$,D$,#$#$# ? ∞+= t t t %t %t % f l , #+.7.7$unde prima componentă(
$,D$,#$# ??
$# ?)
?
∞=−−
t t t %et %t t
a
a
l , #+.7.=$
defineştecomportarea de regim liber sau răspunsul liber al sistemului #determinat numai decondi"ia ini"ială %#t ?$ H %?, considerând semnalul de intrare nul $, iar cea de a doua componentă(
$,D,$#)
$# ?)
$#
?)
?
∞= ∫ −−
t t d4 ua
et % t
t
t aa
f τ τ
, #+.7.>$
defineştecomportarea de regim for"at sau răspunsul for"at al sistemului #determinat numai de semnalul deintrare u#t $, considerândcondi"ia ini"ială nulă $.
escompunerea #+.7.7$ pune în evidenţă următoarele aspecte( %l #t $, exprimat prin #+.7.=$, poate fi privit ca soluţia ecuaţiei diferenţiale #+.7.)$ în forma omoge
?$# ≡t u $ cu condiţia iniţială %?, ceea ce conduce lamodelul de regim liber (???)?) $#,?,?,?$#$# %t %aat %at %a l l =>>=+ 1 #+.7.<$
% f
#t $, exprimat prin #+.7.>$, poate fi privit ca soluţia ecuaţiei diferenţiale #+.7.)$ în formaneomogenă , cucondiţia iniţialănulă #adică %#t ?$ H ?$, ceea ce conduce lamodelul de regim for"at (?$#,?,?,$#$#$# ??)?) =>>=+ t %aat ut %at %a f f . #+.7.8$
)8
/ e
#t $0
' #t $
4!#. &.,.1. 5istemul mecanic utilizat în'xemplul +.7.)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 18/145
stfel, descompunerea #+.7.7$, ne arată că modelul #+.7.)$ considerat iniţial, constituie unmodelcomplet al comportării sistemului fizic, iar %#t $ din #+.7.+$ reprezintărăspunsul complet , care cuprindeinformaţiile privitoare atât laevolu"ia liberă cât şi laevolu"ia for"ată . 5ubliniem faptul că, din punct devedere practic , observarea semnalului %#t $ #prin măsurare, înregistrare etc.$ nu permite evidenţierea sepa celor două componente %l #t $ şi respectiv % f #t $ din descompunerea #+.7.7$. ceastă descompunere are rode a precizala nivel conceptual , faptul că evoluţia în timp a semnalului de ieşire %#t $ este datorată structurii
sistemului #sintetizată în coeficienţiia ) , a ?$ asupra căreia acţionează, pe de o parte,condi"ia ini"ială #modelulde regim liber #+.7.<$$, iar, pe de altă parte semnalul de intrare #modelul de regim forţat #+.7.8$$. 2rebremarcat faptul că descompunerea #+.7.7$ este posibilă datorităliniarită"ii modelului . "n cazul când ipotezade liniaritate a comportării este respectată practic cu suficientă acurateţe, se pot organiza trei tipexperimente(). experimente corespunzătoare modelului complet #+.7.)$ pentru observarea %#t $1+. experimente corespunzătoare modelului de regim liber #+.7.<$ pentru observarea %l #t $17. experimente corespunzătoare modelului de regim forţat #+.7.8$ pentru observarea % f #t $1şi ulterior, se poate verifica validitatea descompunerii #+.7.7$.
'ste evident faptul că, în practică, majoritatea situaţiilor necesită studierea răspunsului compleexistă şi cazuri când obiectul studiului îl poate constitui fie numai răspunsul liber, fie numai răspunsu
E2emplul &.,.&.
5e consideră sistemul mecanic din 'xemplul +.7.). 5ă presupunem că la momentul iniţialt ? resortuleste deformat şi ?$# ? ≠t #drept urmare a unui experiment premergător momentuluit ?$ şi că, începând cumomentult ?, asupra punctului nu se mai aplică nici o forţă #adică ?$# ≡t ' pentru $,D ? ∞t t $.*ondiţiile de mai sus definesccomportarea de regim liber a sistemului mecanic, care poate fi modelat printr&o ecuaţie diferenţială omogenă de forma #+.7.<$(
.?$#,?$#$# ?? ≠==+ t t / t l l el γ
5oluţia problemei *hauchO ataşate acestei ecuaţii diferenţiale este de forma #+.7.=$(
$,,D,$# ??
$# ?∞=
−−t t et
t t /
l
e
γ
şi descrie dependenţa de timp a deplasării punctului din ? către ?.5ă presupunem că la momentul iniţialt ? resortul nu este deformat # ?$# ? =t $ şi că începând cu
momentult ? asupra punctului se aplică o forţă ' #t $ care nu este identic nulă pe intervalul $,D ? ∞t t .*ondiţiile formulate definesc comportarea de regim forţat a sistemului mecanic, care poate fi mo printr&o ecuaţie diferenţială neomogenă de forma #+.7.8$(
.?$#$,#$#$# ≡=+ t -t ' t -/ t - f f e f γ
5oluţia problemei *hauchO ataşate acestei ecuaţii diferenţiale este de forma #+.7.>$(
$,,D,$#)
$# ?$#
?∞= ∫ −− t t d ' et t
t t /
f e τ τ
γ γ τ
şi descrie dependenţa de timp a deplasării punctului , pornind din ?, sub influenţa forţei ' #t $.'cuaţia diferenţială neomogenă construită în 'xemplul +.7.), împreună cu condiţia iniţială ?
arbitrară furnizează un model complet al comportării sistemului mecanic. 5oluţia problemei *hauc #t $determinate în 'xemplul +.7.) defineşterăspunsul complet al sistemului mecanic, luând în considerare atinfluenţa deplasării iniţiale #t ?$, cât şi a forţei ' #t $ pe intervalul $,D ? ∞t t . "n acest caz, dependenţa detimp a deplasării punctului poate fi privită şi prin prisma unei egalităţi de forma #+.7.7$(
$,,D$,#$#$# ? ∞+= t t t t t f l
care are semnificaţia suprapunerii efectelor #răspunsurilor$ corespunzătoare regimului liber şi reforţat.
)C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 19/145
&.,.,. D!nam!ca de "e#!m fo"0at pent"u %emnale de !nt"a"e %tanda"dinamica de regim forţat corespunde modelului #+.7.8$, care derivă din modelul complet #
pentru cazul particular al condiţiei iniţiale nule, adică %#t ?$ H ?. 'voluţia mărimii de ieşire %#t $ este dată derelaţia #+.7.>$.
in punct de vedere practic prezintă interes studierea efectelor datorate semnalelor de intrare dtreaptă şi sinusoidal #ca un caz particular al unui semnal armonic mai complex$.
/entru simplificarea scrierii, vom considera drept moment iniţialt ? H ?, dar aspectele ce urmează a fdiscutate, îşi păstrează valabilitatea pentru orice valoaret ? ≠ ?.
&.,.,.1. R)%pun%ul fo"0at la %emnal t"eapt)5e consideră semnalul de intrare
$,?D,constant$# ∞== t ut u , #+.7.C$
care, conform #+.7.>$ cut ? H ?, va conduce la semnalul de ieşire(
$,?D,))
$#??
)
?
∞−=−
t ua
eua
t %t
aa
f . #+.7.;$
%ntroducând notaţia(
?au
% s = #+.7.)?$
se constată că, datorită condiţiei impuse asupra coeficienţilora ) L ? şi a ? L ?, se obţine comportareaasimptotică
?$#lim =−∞→ s f
t %t % . #+.7.))$
'galitatea #+.7.))$ arată că ieşirea evoluează spre valoarea % s definită prin #+.7.)?$, care poartdenumirea devaloarea de regim sta"ionar a răspunsului forţat şi care depinde de(structura sistemului prin intermediula?magnitudinea semnalului de intrare5
5ub raport experimental, interesează, intuitiv vorbind, cât de GrepedeG se realizează Gapropi % f
#t $ de valoarea de regim staţionar % s, adică un criteriu pentru caracterizarea în timp a procesului de trela limită #+.7.))$. 3n atare criteriu se obţine considerând evoluţia în timp a raportului(
( ) t
aa
s
s f
s f
s f s e
%
%t %
% %
%t %t 6 )
?$#
$?#
$# −=
−=
−−
= , #+.7.)+$
care are semnificaţia uneierori relative a ecartulului curent s f %t % −$# faţă de ecartul ini"ial s s f % % % =−$?# . 'roarea relativăε s#t $, conform +.7.)+, depinde de(
structura sistemului, caracterizată prina ) L ?,a ? L ?1timpul curentt .
/entru un sistem dat #decia ) L ?, a? L ? precizate$, se pot impune praguri corelate cu acurate"eaobserva"iei pentru a evalua procentual cantitateaε s#t $ din #+.7.)+$, având în vedere faptul căε s#t $ este ofuncţie strict decrescătoare în raport cut . e exemplu, pentrut luând valoarea(
?)7 aat s = #+.7.)7$se obţine 7et 6 s s >)??>$# 7 == − , iar pentrut luând valoarea(
?)= aat s = #+.7.)=$se obţine 7et 6 s s +)??+$# = == − .
);

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 20/145
*u alte cuvinte pentrut ≥ t s, cu t s dat de #+.7.)7$ #respectiv #+.7.)=$$, ecartul curent s f %t % −$# ajunge la >P #respectiv +P$ din valoarea ecartului iniţial s s f % % % =−$?# . şadar raportându&ne la un prag de acurateţe a observaţiei de >P #respectiv +P$ din ecartul iniţial, se poate considera că sistemulîn regimul sta"ionar după untimp finit ( )?)7 aat s = conform #+.7.)7$ #respectiv ( )?)= aat s = , conform#+.7.)=$$.
"n intervalul de timp D?,t s$ se spune că sistemul se află înregim tranzitoriu , semnalul de ieşire % f #t $
fiind suficient de îndepărtat de valoare % s către care tinde #ecartul curent s f %t % −$#
este mare încomparaţie cu ecartul final s % $."n conformitate cu expresiile #+.7.)7$, respectiv #+.7.)=$ care definesc durata regimului tra
pentru o eroare de >P #respectiv +P$, se constată că dinamica sistemului este caracterizată de raportu[ ]secunde?) aa8 = #+.7.)>$
denumitconstantă de timp a sistemului. "n consecinţă putem afirma că durata regimului tranzitoriu esatât mai mică cu cât constanta de timp a sistemului este mai mică, #indiferent de expresia #+.7.#+.7.)=$ care este utilizată pentru estimarea luit s$.
"n final, atragem atenţia asupra unei alte modalităţi de scriere a modelului #+.7.)$ care uznotaţia8 din #+.7.)>$ şi care este preferată în majoritatea textelor de sorginte tehnică(
?$?#,?,?$#$#$# % % 9 8 t 9ut %t %8 =>>=+ , #+.7.)<$în care constanta 9 poartă denumirea de factor de amplificare şi are valoarea(
?) a 9 = . #+.7.)8$
ceastă scriere evidenţiază faptul că valoarea ieşirii în regim staţionar % s din #+.7.)?$ poate fi privităca provenind din GamplificareaG valorii constante a semnalului de intrareu . 5ubliniem faptul că termenulde GamplificareG este utilizat în sens larg( de proporţionalitate, 9 putând lua orice valoare pozitivă #decinclusiv subunitară $. *u aceste notaţii, % f #t$ din #+.7.;$ poate fi rescris drept(
.ue 9 t % 8 t
f $)#$# −−=
#+.7.)C$
E2emplul &.,.,.
5e consideră sistemul mecanic din 'xemplul +.7.), având valorile parametrilor/ e H + AFmm şiγ H +? AsFmm. *onstanta de timp8 are conform #+.7.)>$ valoarea
s)?==e/
8 γ
iar factorul de amplificare 9 rezultă, în baza #+.7.)8$, ca fiind(
mmFA>.?)
== e/ 9 .
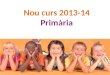
/entru deplasare iniţială nulă #?$ H ?, asupra punctului seaplică o forţă constantă A)?$# == ' t ' . 'voluţia deplasării punctului în funcţie de timp este o expresie de forma #+.7.;$
( mm)>$# )?t f et −−=
având reprezentarea grafică din fig. +.7.+, corespunzătointervalului de timp D?, >?E secunde./entru o eroare de >P, durata regimului tranzitoriu est
#conform #+.7.)7$$t s>P H 78 H 7? secunde iar pentru o eroare de +P, durata regimului tranzitoriu e
#conform #+.7.)=$$t s+P H =8 H =? secunde ambele valori fiind confirmate de reprezentarea grafică din
+.7.+. 2otodată se constată că valoarea de regim staţionar a deplasării punctului estemm>== ' 9 % s .
+?
0 10 20 30 40 500
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
timp [s]
d e p
l a s a r e
[ m m
]
4!#. &.,.&. 'voluţia în timp a deplasării pentruregimul forţat al sistemului considerat în
'xem lul +.7.7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 21/145
eterminarea expresiei analitice a deplasării f #t $, permite şi exprimarea vitezei punctului înfuncţie de timp(
mmFs>,?$# )?t et v −= ,care are reprezentarea grafică din fig. +.7.7, corespunzătoare intervalului de timp D?,>?E secunde.
*u notaţiile introduse în 'xemplul +.7.) se găseşte imediat exprimarea analitică a forţei elacorespunzătoare deformării resortului
A)?$#$# )?t r et vt ' −== γ
şi respectiv a forţei de frecare corespunzătoare amortizorului
A))?$#$# )?t ea et / t ' −−== ,
ambele fiind reprezentate grafic în fig. +.7.= pentru intervalul de timp D?,>?E secunde. Qraficul sugestiv următoarele detalii ale comportării sistemului mecanic #detalii care sunt presupuse ca facititorului cu intuiţie corectă a fenomenelor fizice$(- iniţial întreaga forţă de )?A este utilizată pentru a învinge frecarea din amortizor #resortul
nedeformat şi forţa elastică fiind nulă$,-
în regim staţionar, întreaga forţă de )?A este utilizată pentru a menţine constantă alungirea reso#punctul fiind în repaus şi forţa de frecare fiind nulă$- pe întreaga durată a regimului tranzitoriu forţa elastică este crescătoare în timp #resortul se alu
de la ? la > mm$, iar forţa de frecare scade #viteza scade de la ?.> mmFs la ?$.
0 10 20 30 40 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
timp [s]
v i t e z a
[ m m
/ s ]
4!#. &.,.,. 'voluţia în timp a vitezei pentruregimul forţat al sistemului considerat în
'xemplul +.7.7
0 10 20 30 40 500
1
23
4
5
6
7
8
9
10
timp [s]
f . e
l a s t i c a , f .
f r e c a r e
[ N ]
4!#. &.,.*. 'voluţia în timp a forţei elastice #liniecontinuă$ şi a forţei de frecare #linie întreruptă$
pentru regimul forţat al sistemului considerat în'xemplul +.7.7
E2emplul &.,.*.5e consideră sistemul mecanic din exemplul +.7.) şi aceleaşi valori numerice pentru/ e şi ' ca în
'xemplul +.7.7. /entru coeficientul de frecare vâscoasă amortizorului se consideră valoareaγ ) H )? AsFmm.
Aoua valoareγ ) reprezintă exact jumătate din valoare parametruluiγ utilizată în 'xemplul +.7.7, fapt ce conducela înjumătăţirea constantei de timp a sistemului, adică(
s>+
)?)) ===
e/ 8
γ .
rept consecinţă, durata regimului tranzitoriu #evalua pentru o eroare de >P sau +P$ se va reduce la jumătate ddurata determinată în 'xemplul +.7.7, constatare vizibi
+)
0 10 20 30 40 500
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
timp [s]
d e p
l a s a r e
[ m m
]
4!#. &.,.5. 'voluţia în timp a deplasării pentruregimul forţat al sistemului considerat în
'xemplul +.7.=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 22/145
imediat şi din graficul #t $ al deplasării punctului , reprezentat în fig. +.7.> pentru intervalul de timp Dsecunde.
2ot din fig. +.7.> se observă ca valoarea de regim staţionar pentru deplasarea punctului rămaceeaşi ca în cazul 'xemplului +.7.7 #adică >mm$. ceasta se datorează nemodificării valorii num pentru forţa constantă A)?= ' şi pentru factorul de amplificare al sistemului 9 H ?.>mmFA.
E2emplul &.,.5.
5e consideră sistemul mecanic din 'xemplul +.7.) şi aceleaşi valori numerice pentru parametrii/ e şiγ ca în 'xemplul +.7.7.
acă pentru forţa constantă ce acţionează din exterior se consideră valoarea A)?) −= ' adică forţaegală şi de sens contrar cu cea din exemplul +.7.7$ efectul va consta în comprimarea resortului, dep punctului : în regim staţionar fiind de >mm #adică egală cu cea din 'xemplul +.7.7, dar în sens contrar
0 10 20 30 40 50-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
timp [s]
d e p
l a s a r e
[ m m
]
0 10 20 30 40 500
5
10
15
timp [s]
d e p
l a s a r e
[ m m
]
6a7 6+7
4!#. &.,.9. 'voluţia în timp a deplasării pentru două regimuri forţate diferite ale sistemului din'xemplul +.7.>(6a7 mărimea de intrare este A)?) −= ' 16+7 mărimea de intrare este A7?+ = '
acă pentru forţa constantă ce acţionează din exterior se consideră valoarea ' +H 7?A #adică deacelaşi sens dar de trei ori mai mare ca în 'xemplul +.7.7$, atunci, în regim staţionar, deplasarea pun va fi de )>mm #adică în acelaşi sens şi de trei ori mai mare ca cea din 'xemplul +.7.7$.
"n ambele cazuri, durata regimului tranzitoriu rămâne aceeaşi ca în 'xemplul +.7.7, întconstanta de timp a rămas aceeaşi #parametrii/ e şi γ nefiind modificaţi$.
2oate aceste constatări sunt vizibile şi pe graficul deplasării #t $ reprezentat înfig. +.7.<.
&.,.,.&. R)%pun%ul fo"0at la %emnal %!nu%o!dal5e consideră semnalul de intrare(
$,?D??sin$# ∞>>= t (; ( :t(; :t u , #+.7.);$care, conform #+.7.>$ cut ? H ?, va conduce #în urma calculelor pe care le lăsăm în seama cititorului exerciţiu$ la semnalul de ieşire(
( ) .$#$#sin$#$# )
? t aa
f e; :&;t-;; :M t %−
+= #+.7.+?$
Aotaţiile din #+.7.+?$ au semnificaţia următoare(
))$#
++
$)8.7.+#$)>.7.+#not
++)
+? +
=+
=;8 9
;aa M
(ω , #+.7.+)$
++

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 23/145
( )ω ω ω 8 aa (
arctgarctg$#$)8.7.+#$)>.7.+#not
?
) =
= , #+.7.++$
)$#
++
$)8.7.+#$)>.7.+#
++)
+?
)
+=
+=
ω
ω
ω
ω ω
8 98
aaa
& (not
#+.7.+7$
şi pun în evidenţă dependenţa lui % f #t $ de(
structura sistemului prin intermediula ) L ?,a? L ? sau, echivalent8 L ?, 9 L ?1 pulsaţiaω a semnalului de intrare #+.7.);$.
%ntroducând notaţia( )$#sin$#$# ω ω −= t ; :M t % p #+.7.+=$
se constată că datorită condiţiei impuse asupra coeficienţilora ) L ?, a ? L ?, se obţine comportareaasimptotică(
( ) ?lim$#$#$#lim )
?
==−−
∞→∞→
t a
a
t p f
t e :&t %t % ω . #+.7.+>$
'galitatea #+.7.+>$ arată că ieşirea evoluează către unregim permanent caracterizat prinrăspunsul nregim permanent sinusoidal #+.7.+=$ care prezintă următoarele particularităţi(
este un semnal sinusoidal deaceea#i pulsa"ie ω ca şi semnalul de intrare1are amplitudinea dependentă deω #funcţie strict descrescătoare$, prin intermediul coeficientului M #ω $#+.7.+)$1este defazat în urma semnalului de intrare #+.7.);$ cu un unghi dependent deω #funcţie strictcrescătoare$, precizat de #ω $ #+.7.++$.
5ub raport experimental, interesează, intuitiv vorbind cât de GrepedeG se realizează Gapropi % f #t $ de răspunsul de regim permanent sinusoidal % p#t $. in relaţia #+.7.+>$ se constată că Gmodul apropiereG are o descreştere exponenţială de parametru )F8 Ha?Fa ). eci structura sistemului, prinintermediul constantei de timp8 #+.7.)>$, dă informaţii privind durataregimului tranzitoriu necesar a fitraversat, înaintea instalăriiregimului permanent .
rept criteriu de evaluare a Gmodului de apropiereG se poate utiliza evoluţia în timp a raportulu
.$#
$#
$?#$?#
$#$#$#
$)>.7.+#not)
?)
?
8 t t
aat
aa
p f
p f p ee
:&e :&
% %
t %t %t
−−−
===−−
=ω
ω ε #+.7.+<$
:aportul ε p#t $ din #+.7.+<$ are semnificaţia unei erori relative a ecartului curent $#$# t %t % p f − faţă de ecartul iniţial $.#$?#$?# ω :& % % p f =− *um ε p#t $ este o funcţie strict descrescătoare în raport
t , putem face apel laestimări pentru durata regimului tranzitoriu care sunt perfect analoge estimărilo#+.7.)7$, respectiv #+.7.)=$, din cazul răspunsului la semnal treaptă. stfel, pentru t luând valoarea(
8 aa
t p 77?
) == #+.7.+8$
se obţineε p#t p$ He 47 >P, iar pentrut luând valoarea(
8 aa
t p ==?
) == #+.7.+C$
se obţineε p#t p$ He 4= +P.
*u alte cuvinte, din punctul de vedere al observaţiei fizice se poate spune că regimul permaninstalează după un timp finitt p dat de #+.7.+8$ #respectiv #+.7.+C$$, cu o precizie de >P #respectiv +ecartul iniţial.
+7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 24/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 25/145
E2emplul &.,.:.5e consideră sistemul mecanic din 'xemplul +.7.) cu aceeaşi valoare numerică pentru paramet/ e
şi aceeaşi expresie pentru ' #t $ ca în 'xemplul +.7.<. /entru coeficientul de frecare vâscoasă a amortizoruse consideră
A5Fmm)?) =γ ,adică exact jumătate din valoarea utilizată în 'xemplul +.7.rept consecinţă durata regimului tranzitoriu scade la jumătatfapt evidenţiat şi de reprezentarea grafică din fig. +.7.C #cu lcontinuă este reprezentată mărimea de ieşire f
#t $, iar cu linieîntreruptă este reprezentată componenta de regim permansinusoidal p#t $ către care tinde ieşirea după expirarea regimultranzitoriu$. /entru această reprezentare grafică se constatăefectul înjumătăţirii constantei de timp asupra elementelorcaracterizează regimul permanent sinusoidal(- raportul dintre amplitudinea semnalului de ieşire f
#t $ dupăinstalarea regimului permanent şi amplitudinea semnalu
de intrare ' #t $ este, conform #+.7.+)$ mmFA,)$=F#>.? + +π având o valoare mai mare decât în'xemplul +.7.<1
- defazajul dintre semnalul de ieşire f #t $ după instalarea regimului permanent şi semnalul de intrare ' #t $
este, conform #+.7.++$, >8rad)$+F#arctg π având o valoare mai mică decât în 'xemplul +.7.<.
E2emplul &.,.;.5e consideră sistemul mecanic din 'xemplul +.7.) cu aceeaşi valoare numerică pentru parame/ e
şi γ ca în 'xemplul +.7.<., însă, pentru forţa ce acţionează din exterior, se consideră expresia(
A,+?
sin)?$#) t t ' π=
ceea ce înseamnă o înjumătăţire a valorii pulsaţiei, în raport cu exemplul +.7.<.
0 10 20 30 40 50-10
-8
-6
-4
-2
0
2
4
6
8
10
timp [s]
F o r t a
[ N ]
0 10 20 30 40 50-3
-2
-1
0
1
2
3
4
timp [s]
d e p
l a s a r e a
[ m m
]
6a7 6+74!#. &.,.<. *omportarea în regim forţat sinusoidal a sistemului considerat în 'xemplul +.7.C(
6a7 evoluţia în timp a forţei sinusoidale aplicate la intrare1 6+7evoluţia în timp a deplasării rezultată caieşire #linie continuă$ şi componenta de regim permanent sinusoidal #linie întreruptă$ către care tinde
ieşirea după expirarea regimului tranzitoriu
"n fig. +.7.;#a$ se reprezintă grafic evoluţia lui ' )#t $. "n fig. +.7.;#b$, este plotată, cu linie continuevoluţia punctului în regim forţat, iar cu linie întreruptă, componenta de regim permanent.
5e constată că regimul tranzitoriu #evaluat pentru o eroare de >P sau +P$ are aceeaşi durată'xemplul +.7.<, întrucât constanta de timp este aceeaşi."n schimb înjumătăţirea valorii pulsaţiei semnalului de intrare ' #t $ are următoarele efecte asupra
elementelor caracteristice regimului permanent sinusoidal(
+>
0 10 20 30 40 50-3
-2
-1
0
1
2
3
4
timp [s]
d e p
l a s a r e a
[ m
m ]
4!#. &.,.;. 'voluţia în timp a deplasării pentru regimul forţat sinusoidal al
sistemului considerat în 'xemplul +.7.8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 26/145
- raportul dintre amplitudinea semnalului de ieşire f #t $ după instalarea regimului permanent şi amplitudin
semnalului de intrare ' #t $ este, conform #+.7.+)$ mmFA,)$=F#+) +
+π având o valoare mai mare
decât în 'xemplul +.7.<1- defazajul dintre semnalul de ieşire f
#t $ după instalarea regimului permanent şi semnalul de intrare ' #t $este, conform #+.7.++$ >8rad)$+F#arctg π având o valoare mai mică decât în 'xemplul +.7.<.
&.,.,.,. Comenta"!! a%up"a uno" a%pecte compo"tamentale ale %!%temelo" pu%e 'n e3!")%pun%ul fo"0atin analiza efectuată în subparagrafele anterioare +.7.7.) şi +.7.7.+ se constată că după traver
regimului tranzitoriu , în răspunsul de regim forţat se regăsesccaracteristice esen"iale ale semnalului deintrare, şi anume(
semnal constant % s #+.7.)?$, în cazul intrării treaptă #+.7.C$semnal sinusoidal % p#t $ #+.7.+=$, în cazul intrării sinusoidale #+.7.);$, ambele posedând aceeaşi pω .
in aceste motive se mai spune că în regim forţat, după expirarea regimului tranzitoriu, ieGcopieG forma semnalului de intrare. ceastă afirmaţie nu vizează numai semnalele de intrare treasinusoidale, ea păstrându&şi valabilitatea pentru o clasă mai largă de semnale de intrare. e asemene precizăm că afirmaţia de mai sus este probată şi de modele liniare descrise prin ecuaţii diferenţiale dsuperior.
=urata regimului tranzitoriu este dependentă de structura sistemului conform #+.7.)7$, #+.7.)=$ sa#+.7.+8$, #+.7.+C$ şi constituie omăsură a iner"iei pe care o manifestă sistemul la părăsirea condiţiei iniţinule %#?$ H ?.
"ncheiem comentariile din acest paragraf, subliniind faptul că termenul de Gregim permacoperă semantic şi cazul regimului staţionar, în sensul unui echivalent ca exprimare de tipul G permanent constantG #spre deosebire, de exemplu, de Gregim permanent sinusoidalG$. Mai mult, divedere al formalizării matematice, se constată că atât % f
#t $ dat de #+.7.;$ #pentru intrare treaptă$, cât şi % f #t $
dat de #+.7.+?$ #pentru intrare sinusoidală$ pot fi scrise sub forma($#$#$# t %t %t % t p f += , #+.7.+;$
cu următoarea semnificaţie a notaţiilor( % p#t $ notează componenta permanentă a răspunsului forţat % f
#t $, având expresia concretă % p#t $ H % s H constant #+.7.)?$ şi respectiv % p#t $ din #+.7.+=$1 %t #t $ noteazăcomponenta tranzitorie a răspunsului forţat #cu semnificaţia evidentă, conform #+.7.+;
$#$#$# t %t %t % p f t −= reprezintă ecartul curent$ având proprietatea?$#lim =
∞→t %t
t , #+.7.7?$
care asigură comportarea asimptotică a regimului forţat,indiferent de tipul semnalului de intrare #treaptă sau
sinusoidal$.%nspectând modul în care s&a abordat anterior problema duratei regimului tranzitoriu, se obdependenţa acestei durate de constanta de timp8 #+.7.)>$ #adică de structura sistemului$ se datoremodului exponenţial în care Gse stingeG componenta tranzitorie %t
#t $. stfel se justifică înmod unitar valorileobţinute pentrut s şi t p ca estimări ale timpului necesar instalării regimului permanent,indiferent de tipul
semnalului de intrare .ceste estimări sunt legate de evoluţia în timp a unei erori relative, exprimabilă unitar prin(
8 t not t
aa
t
t
p f
p f ee
%t %
% %
t %t %t
−−===
−−
=$)>.7.+#
)
?
$?#
$#
$?#$?#
$#$#$#ε , #+.7.7)$
din care se poate obţine atâtε s#t $ #+.7.)+$, cât şiε p#t $ #+.7.+<$.
+<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 27/145
&.,.*. D!nam!ca de "e#!m l!+e"inamica de regim liber corespunde modelului #+.7.<$, care derivă din modelul complet #
pentru cazul particular al mărimii de intrare identic nule, adicău#t $≡ ?./entru simplificarea scrierii, vom considera drept moment iniţialt ? H ?, dar aspectele ce urmează a f
discutate îşi păstrează valabilitatea pentru orice valoaret ?.'voluţia mărimii de ieşire %#t $ este dată de relaţia #+.7.=$ cut ? H ?, conducând la
$.?#$?#$#$)>.7.+#not
)
?
%e %et % 8 t t
aa
l −−
== #+.7.7+$
:elaţia #+.7.7+$ pune imediat în evidenţă comportarea asimptotică(,?$#lim =
∞→t %l
t #+.7.77$
pentru orice %#?$ R . 5e spune că % H ? reprezintă un punct de echilibru asimptotic stabil pentru sistemulconsiderat, în sensul că evoluţia liberă a sistemului din orice condiţie iniţială %#?$≠ ? se apropie asimptoticde punctul de echilibru. 5ubliniem faptul că această comportare este valabilă numai pentru restricţiaa ) L ?,a ? L ? impusă coeficienţilor ecuaţiei diferenţiale #+.7.)$, constatare ce rezultă imediat din exprimarea %l #t $
din #+.7.7+$. #/entru detalii referitoare la stabilitate, se va parcurge secţiunea +.; din capitolul curent$rept criteriu pentru a evalua Gmodul de apropiereG a lui %l #t $ de ? se poate utiliza raportul
8 t t
aa
l
l l ee
%
t %t
−−===
$)>.7.+#not)
?
$?#
$#$#ε , #+.7.7=$
care are semnificaţia unei erori relative a ecartului curent $#t %l faţă de ecartul iniţial $?#$?# l % % = .*um ε l
#t $ este o funcţie descrescătoare det , putem utiliza praguri de eroare perfect analogestimărilor #+.7.)7$, respectiv #+.7.)=$. stfel pentrut luând valoarea(
8 aat l 77 ?) == , #+.7.7>$
se obţineε l #t l $ He 47 >P, iar pentrut luând valoarea(
,== ?) 8 aat l == #+.7.7<$se obţineε l
#t l $ He 4= +P.*u alte cuvinte, din punct de vedere al observaţiei fizice se poate spune că răspunsul liber Gse
după un timp finitt l dat de #+.7.7>$ #respectiv #+.7.7<$$, cu o precizie de >P #respectiv +P$ din mcondiţiei iniţiale.
E2emplul &.,.<.
5e consideră sistemul mecanic din 'xemplul +.7.) în care parametrii au valorile/ e H + AFmm şiγ H +? AsFmm. acă punctul posedă o deplasare iniţială #?$ H + mm, revenirea lui la valoarea ?, absenţa oricărei forţe externe, este descrisă, conform #+.7.7+$, de formula(
mm+$# 8 t l et −= .
/entru o eroare relativă de >P, regimul liber poate fi considerat încheiat , conform #+.7.7>$, dusecunde7?7P> == 8 t l .
/entru o eroare relativă de +P, regimul liber poate fi considerat încheiat, conform #+.7.7<$, dupsecunde=?=P+ == 8 t l .
acă se consideră pentru constanta elastică a resortului o valoare dublă, atunci, conform #+.constanta de timp8 se va înjumătăţi, iar durata regimului liber #evaluata pentru o eroare relativă de >+P$ se va reduce la jumătate.
"n fig. +.7.)? este reprezentat răspunsul liber al sistemului mecanic pentru cele două situaţii dismai sus.
+8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 28/145
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
timp [s]
d e p
l a s a r e
[ m m
]
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
timp [s]
d e p
l a s a r e
[ m m
]
6a7 6+74!#. &.,.1=. 'voluţia în timp a deplasării pentru regimul liber al sistemului considerat în 'xemplul
+.7.;, cu două valori diferite pentru constanta de elasticitate(6a7 / e H+16+7 / e H).
&.,.5. R)%pun%ul complet pent"u %emnale de !nt"a"e %tanda"d@om considera ca şi în paragraful +.7.7. situaţia semnalelor de intrare treaptă şi sinusoida
asemenea vom apela la simplificarea scrierii rezultată din alegerea momentului iniţialt ? H ?. *a mod detratare însă, vom face uz de punctul de vedere unificator dezvoltat la finele subparagrafului +.7.7.7, şde exprimarea răspunsului forţat sub forma #+.7.+;$. *u aceasta, în baza relaţiei #+.7.7$, putem scrirăspunsul complet expresia(
$#$#$#$# t %t %t %t % pt l ++= , #+.7.78$
indiferent de tipul semnalului de intrare . *onstatăm imediat că suma de semnale %l #t $ R %t #t $ posedă proprietatea(
( ) ?$#$#lim =+∞→
t %t % t l t , #+.7.7C$
care asigură comportarea de tip asimptotic a răspunsului complet(?$#$#lim =−
∞→t %t % p
t . #+.7.7;$
Mai mult, din analiza efectuată în paragrafele anterioare, se constată că anularea sau Gstinsumei de semnale %l #t $ R %t #t $ are loc într&o manieră exponenţială caracterizată prin eroarea relativă(
8 t t
a
a
t l
t l
p
pee
% %
t %t %
% %
t %t %t
−−==
++=
−−
=$)>.7.+#not
)
?
$?#$?#
$#$#
$?#$?#
$#$#$#ε . #+.7.=?$
*u alte cuvinte, se poate afirma şi în cazul răspunsului complet, că, din punct de vedere pr
regimul permanent se instalează după uninterval finit de timp , dependent de structura sistemului, priintermediul constantei de timp8 #+.7.)>$, astfel(după 78 , dacă se consideră o eroare de >P dinecartul ini"ial $?#$?# t l % % + 1după =8 , dacă se consideră o eroare de +P dinecartul ini"ial $?#$?# t l % % + .
"n scopul evitării oricărei confuzii, precizăm că ecarturile ce intervin în #+.7.=?$ se expliciteazîn cazul semnalelor treaptă şi sinusoidale, după cum urmează(
pentru semnal treaptă
sat a
l t l %et %t %t % )?$#$#$# −−=+ , #+.7.=)$
cu % s definit în #+.7.)?$1 pentru semnal sinusoidal
$#$#$#$# )? ω :&et %t %t % at al t l
−+=+ , #+.7.=+$cu &#ω $ definit în #+.7.+7$.
+C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 29/145
E2emplu &.,.1=.
5e consideră sistemul mecanic din 'xemplul +.7.), având valorile parametrilor valorile/ e H + AFmmşi γ H +? AsFmm. /oziţia iniţială a punctului este #?$ H + mm. supra sistemului mecanic se aplicăforţă externă ' #t $ de forma
∞−
−=
.s$,) = >D1?
s,$) = >,) 7 ?D1 A) >
s ,$) 7 ?,) ? ?D1 A+ ?
s ,$) ) ?,) ? ?D1?s,$) ? ?,> ?D1 A) ?
s,$> ?,?D1 A) ?
$#
t
t
t
t t
t
t '
"n fig. +.7.)) #a$ este plotată evoluţia în timp a forţei ' #t $ #pentru intervalul de timp D?, +??E s$, iafig. +.7.))#b$ se dă reprezentarea grafică a modului în care se modifică poziţia punctului #adică răscomplet al sistemului pentru semnalul de intrare ' #t $ considerat$.
*onsiderăm că, până în acest punct, cititorul a acumulat suficientă experienţă pentru a intesingur detaliile evoluţiei deplasării #t $. e asemenea, cititorul este invitat ca, pentru aprofundare să schiţgrafic evoluţia în timp a vitezeiv#t $ a punctului , pornind de la reprezentarea lui #t $ din fig. +.7.))#b$.
0 50 100 150 200-15
-10
-5
0
5
10
15
20
timp [s]
f o r t a
[ N ]
0 50 100 150 200-8
-6-4
-2
0
2
4
6
8
10
timp [s]
d e p
l a s a r e
[ m m
]
6a7 6+74!#. &.,.11. :ăspunsul complet al sistemului considerat în 'xemplul +.7.)?.6a7 evoluţia în timp a
forţei aplicate la intrare16+7 evoluţia în timp a deplasării rezultată ca ieşire #linie continuă$ şicomponenta de regim staţionar #linie întreruptă$ către care tinde ieşirea după expirarea regimurilorlibere şi a regimurilor tranzitorii cauzate de fiecare schimbare a valorii constante din funcţia scară
prezentată la intrare.
&.,.9. T"ata"ea ope"a0!onal) cu a>uto"ul t"an%fo"m)"!! Laplace&.,.9.1. R)%pun%ul complet 'n t"ata"ea ope"a0!onal):ezolvarea ecuaţiei #+.7.)$ poate fi abordată şi prin intermediul calculului operaţional, cu aj
transformatei Baplace #pentru detalii, vezi nexa %$. *onsiderând momentul iniţialt ? H ? şi aplicândtransformarea Baplace ecuaţiei #+.7.)$ cu notaţiile $#$# t % s+ L= , $#$# t u s, L= obţinem(
( ) $.#$#$?#$# ?) s, s+ a % s s+ a =+− #+.7.=7$
'cuaţia de mai sus este detip algebric şi permite exprimarea algebrică a lui+ # s$ în funcţie de %#?$ şi, # s$ sub forma(
$#)
$?#$#?)?)
) s, a sa %a saa
s+ +++= , #+.7.==&a$
sau, echivalent, în baza notaţiilor #+.7.)>$, #+.7.)8$(
+;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 30/145
$.#)
$?#)
$# s, 8s
9 %
8s8
s+ +++= #+.7.==&b$
5e observă cu uşurinţă faptul că prima componentă din exprimările echivalente #+.7.==&a$, #+.7.=are drept originalrăspunsul liber #+.7.=$ cut ? H ?, adică
$?#$?#$# )?
?)
) %e %a sa
a s+ at a
l −=+= L , #+.7.=>&a$
sau, în notaţiile #+.7.)>$, #+.7.)8$(
$?#$?#)
$# %e %8s
8 s+ 8 t l
−=+= L . #+.7.=>&b$
"n mod similar, observăm căa doua componentă din exprimările echivalente #+.7.==&a$, #+.7.=are drept originalrăspunsul for"at #+.7.>$ cut ? H ?, adică(
=+= ∫ −−t at a f d u
ae s,
a sa s+ ?
)
$#
?)$#
)$#
)$# )? τ τ τ L , #+.7.=<&a$
sau, în notaţiile #+.7.)>$, #+.7.)8$(
=+= ∫ −−t 8 t f d 9ue s,
8s 9
s+ ?
$# $#$#)
$# τ τ τ L . #+.7.=<&b$
"n baza acestor constatări, putem conchide că descompunerea #+.7.7$ pusă în evidenţă pentru %#t $ a ecuaţiei diferenţiale #+.7.)$ se păstrează şi în exprimarea operaţională cu ajutorul transfoBaplace, adică(
$.#$#$# s+ s+ s+ f l += #+.7.=8$bordarea operaţională este echivalentă cu tratarea în domeniul timp şi, din punct de vede
aplicaţiilor tehnico&inginereşti, prezintă următoarele două avantaje care motivează utilizarea ei frecv
#i$ 5crierea #+.7.==$ este foarte sugestivă pentru a pune în evidenţă modul cum răspunsul complede(- structura sistemului, descrisă prin funcţiile raţionale(
,)?)
)+=+ 8s
8 a sa
a#+.7.=C$
))
?) +=
+ 8s 9
a sa 1 #+.7.=;$
- condiţia iniţială %#?$1- semnalul #mărimea de intrare$, # s$.
#ii$ "n cazul unei mărimi de intrare a cărei dependenţă de timp este descrisă analitic printr&o fuu#t $mai complicată, calculul lui %#t $ este foarte comod folosind tabelele de transformate Baplace, confalgoritmului(
$#$#$#$#)$==.7.+# t % s+ s, t u
- → → → LL .
E2emplul &.,.11.
5e consideră sistemul mecanic din 'xemplul +.7.)., având valorile parametrilor/ e H + AFmm şiγ H +? AsFmm. /entru deplasare iniţială #?$ H + mm, asupra punctului se aplică o forţă ce variazătimp într&o manieră sinusoidală, conform legii
A$)?sin#)?$# t t ' π = ,care este reprezentată grafic în fig. +.7.)+#a$.
plicând transformarea Baplace ecuaţiei diferenţiale #vezi 'xemplul +.7.)$.7?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 31/145
,+$?#$,#$#+$#+? ==+ -t ' t -t -
şi utilizând ( )++ $)?#$)?sin#)? π π π += st L , obţinem(
++ $)?#$#+$?#+?$#+?
π π
+=+−
s s > s s> ,
care conduce la(
.$)?#++?
)++?
+?+$#++ π
π ++
++
= s s s
s >
ceastă ultimă expresie poate fi scrisă astfel încât să pună în evidenţă numai funcţii imadisponibile în orice tabel de transformate Baplace(
.)$)?#)
)
$)?#
)?
)
>
)?)
)
)
>
)?)
)+$#
++++++++
++
−+++
+++
++
=π
π
π π π
π
π π
π
s s
s s s s >
/rin utilizarea transformării Baplace inverse, se obţine
−++++= −−
$arctgsin#)?cos$arctgcos#)?sin)
>
)
>+$# +
)?+
)?π
π π
π
π π
π t t eet
t t
,sau, echivalent(
−
++
++= −− π
π
π π
π arctg
)?sin
)
>
)
>+$#
+)?
+)? t
eet t t ,
în care primul termen este componenta de regim liber, al doilea termen este componenta de regim traşi al treilea termen este componenta de regim permanent #a se compara cu 'xemplul 7.+.<$
0 10 20 30 40 50-10
-8
-6
-4
-2
0
2
4
6
8
10
timp [s]
f o r t a
[ N ]
0 10 20 30 40 50-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
timp [s]
d e p
l a s a r e
[ m m
]
6a7 6+74!#. &.,.1&. :ăspunsul complet al sistemului considerat în 'xemplul +.7.))(6a7 evoluţia în timp a
forţei sinusoidale aplicate la intrare1 6+7evoluţia în timp a deplasării rezultate ca ieşire #linie continuă$şi componenta de regim permanent sinusoidal #linie întreruptă$ către care tinde ieşirea după expirarearegimului liber şi a regimului tranzitoriu.
ependenţa de timp a deplasării punctului , #t $, este reprezentată grafic în fig. +.7.)+#bcorespunzător intervalului de timp D?,>?E secunde. /e acelaşi grafic, cu linie întreruptă este plcomponenta de regim permanent sinusoidal #al treilea termen$.
&.,.9.&. R)%pun%ul fo"0at 'n t"ata"ea ope"a0!onal). Modelul de t!p func0!e de t"an%fe""n studierea sistemelor fizico&tehnice, ipoteza condiţiilor iniţiale nule este frecvent satisfă
practică, deoarece evoluţia sistemelor porneşte de regulă din repaos. stfel, considerând momentul t ? H ?, dinamica de regim forţat este modelată în exprimare operaţională prin #+.7.=<$, care a
$#$# t % s+ f f L= este legată de $#$# t u s, L= prin intermediul funcţiei raţionale din #+.7.=;$. Aotâfuncţia raţională din #+.7.=;$ drept# s$, adică(
7)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 32/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 33/145
&.*.1. T"an(!0!a cau(al) !nt"a"e %ta"e !e !"e&.*.1.&. Modele !nt"a"e?%ta"e?!e !"e de o"d!nuln"n cazul sistemelor fizice care conţinn elemente acumulatoare de energie, conectate în cauzalit
integrală, modelul #+.=.)$, #+.=.+$ se generalizează sub forma următoarei scrierivectorial – matriceale (ecuaţia de stare #sauecua"ia stării $
?$?#$1#$#$# 22+A22 =+= t ut t 1 #+.=.7$ecuaţia de ieşire #sauecua"ia ie#irii $(
$#$#$# t dut t % 8 += 2c . #+.=.=$"n modelul intrare 4 stare 4 ieşire #+.=.7$, #+.=.=$, semnificaţia notaţiilor este următoarea(- 6uncţia vectorială
nt R R 2 →+($# #+.=.>$colectează celen variabile de stare şi poartă denumirea devector de stare , sau vectorulvariabilelor de stare .
- @ectorul coloanăn
n -
-R 2 = ?
)?
$?# #+.=.<$colectează valorile iniţiale ale variabilelor de stare şi poartă denumirea devector al condi"iilor ini"iale.- MatriceaA este pătrată, de ordinuln, adică(
nn
nnn
n
aa
aa×= R A
...
.........
...
)
)))
. #+.=.8$
- @ectorul+ este coloană de dimensiunen, adică(
))
×= n
nb
b
R + . #+.=.C$
- @ectorulc8 este linie de dimensiunen, adică([ ] n
n8 cc ×= )
) R c . #+.=.;$- *onstanta R d poate fi nulă, caz în care termenul $#t du va dispărea complet din ecuaţia ieşirii #+.=.=- 6uncţiileu#t $, %#t $(R R→R au semnificaţia semnalelor de intrare , respectivie#ire .
/entru variabila de intrareu#t $ se impune condiţia #firească pentru practică$ de a ficontinuă pe por"iuni , cu discontinuităţi de speţa întâia. ceastă condiţie reprezintă orela are a condiţiei cau#t $ să fie
continuă peR R, care #conform teoriei matematice a sistemelor de ecuaţii diferenţiale$ asigură existunicitatea soluţiei peR R pentru sistemul de ecuaţii diferenţiale #+.=.7$. :elaxarea operează în continuită"ii #de natură fizică$ a semnalelor #t $, astfel că, în fiecare punct de discontinuitatet? a luiu#t $,condiţia finală #la stânga$ #t? & ? $ poate fi privită drept o nouă condiţie iniţială #t?$ H #t? & ?$ pentruurmătorul interval de continuitate a variabilei de intrareu#t $.
E2emplul &.*.1.
5e consideră un circuit electric alcătuit dintr&un rezistor #cu rezistenţă &e$, o bobină #cu inductanţa *$şi un condensator # cu capacitatea e$ conectate în serie,
conform fig. +.=.), cu o sursă de tensiunee#t $ #care se modificăîn timp, după o lege precizată$. 2ensiuneae#t $ furnizată desursă constituie mărimea de intrare.
77
u #t $
i *#t $
e#t $ u &#t $ u *#t $
&e *
1 e
4!#. &.*.1.*ircuitul electric utilizat înexemplul +.=.).

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 34/145
legem drept variabile de stare tensiunea pe condensatoruc#t $ şi curentul prin bobinăi *#t $, cu scopulde a exploata exprimarea de tip integral a legilor ce descriu funcţionarea condensatorului şi a bobacumulatori de energie(
?$?#$,# 1 1 1
ce uut i
dt du
1 == ,
?$?#$,# * * * *
iit udt
d i * == ,
undei #t $ şiu *#t $ sunt curentul prin condensator şi, respectiv, tensiunea pe bobină.in faptul că elementele circuitului sunt conectate în serie, rezultă că prin toate elementele ci
acelaşi curent, adică($#$#$# t it it i * &1 == ,
iar tensiunea pe bobină poate fi exprimată #conform legii lui Kirchoff$ sub forma($#$#$#$#$#$#$# t ut i &t et ut ut et u 1 *e1 & * −−=−−= .
"nlocuind aceste expresii în membrul drept al modelelor de tip integrator de mai sus, se sistemul de două ecuaţii diferenţiale liniare, neomogene(
$1#)
t i dt
du *
e
=
$#)
$#$#)
t e *
t i *
&t u
*dt di
*e
* +−−= .
stfel intrăm în posesia ecua"iei vectorial-matriceale de stare , scrierea generală #+.=.7$ particularizându&se sub forma(
=+−−
=?
?
$?#$?#
$1#)?$#$#
)
)?
*
1
*
1
*
1
ee
*
1
iu
iu
t e *t i
t u
* &
*
1
dt didt
du
.
"n funcţie de obiectivul urmărit prin construcţia modelului, rolul mărimii de ieşire poate fi îndde oricare din semnalele #variabilele$ ce apar în descrierea funcţionării circuitului, mai puţine#t $ #care se presupune a fi cunoscută prin însăşi natura problemei$. stfel, ecuaţia ieşirii având forma generală #+. particularizează conform următoarelor cazuri(#i$ acă tensiunea pe condensator este considerată drept mărime de ieşire, atunci ecuaţia #+.=.=$ dev
[ ] = $#
$#?)$# t i
t ut u *
,
arătând că semnalul de ieşire coincide cu prima variabilă de stare aleasă.#ii$ acăcurentul prin bobină #sau, echivalent, curentul furnizat de sursa circuitului serie din fig. +
este considerat drept mărime de ieşire, atunci ecuaţia #+.=.=$ devine(
[ ] =$#
$#)?$#
t it u
t i *
* ,
arătând că semnalul de ieşire coincide cu a doua variabilă de stare.#iii$ acă tensiunea pe rezistenţă este considerată drept mărime de ieşire, atunci ecuaţia #+.=.=$ de
[ ] =$#$#?$#
t it u &t u
*
e & ,
întrucât avem exprimarea $#$# t i &t u *e & = .
7=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 35/145
#iv$ acătensiunea pe bobină este considerată drept mărime de ieşire, atunci #+.=.=.$ devine(
[ ] $#$#$#
)$# t et it u
&t u *
e * +−−= ,
întrucât, din funcţionarea circuitului, avem exprimarea $#$#$#$# t ut ut et u 1 & * −−= .
&.*.&. R)%pun% complet8 ")%pun% l!+e" ! ")%pun% fo"0at'xprimarea analitică a mărimii de ieşire %#t $ se realizează pornind de la soluţia sistemului de ecu
diferenţiale #+.=.7$ care constituie ecuaţia intrare 4 stare a modelului, şi anume(
∫ −+= t t t d ueet ?
$# $#$?#$# τ τ τ +22 AA . #+.=.)?$
:ecomandăm ca exprimarea #+.=.)?$ să fie privită drept o generalizare firească a soluţiei ecuaţieidiferenţiale de ordin %, cu coeficienţi constanţi, generalizare care face apel la exponenţiala mafirmaţiile ce urmează vor pune în evidenţă utilitatea înţelegerii unei atare generalizări.
"n baza relaţiei #+.=.)?$, vectorul de stare #t $ poate fi scris sub forma($#$#$# t t t f l 222 += , #+.=.))$
unde( )?$# 22 A t l et = #+.=.)+$
defineştecomponenta liberă #de regim liber $ a stării, iar
∫ −= t t f d uet
?$# $#$# τ τ τ +2 A #+.=.)7$
defineştecomponenta for"ată #de regim for"at $ a stării.*omponenta de regim liber2l #t $ constituie soluţia ecuaţiei #+.=.7$ în formaomogenă cu condi"ii
ini"iale nenule , adică(
?$?#$,#$# 22A22 == l l l t t . #+.=.)=$
*omponenta de regim forţat2 f
#t $ constituie soluţia ecuaţiei #+.=.7$ în formaneomogenă , cu condiţiiiniţialenule , adică(?$?#$,#$#$# =+= f f f t ut t 2+A22 . #+.=.)>$
stfel, descompunerea #+.=.))$ ne arată că modelul #+.=.7$ constituie unmodel complet alcomportării sistemului, iar2#t $ din #+.=.)?$ reprezintărăspunsul complet pe stare , care cuprinde informaţiile privitoare atât laevolu"ia liberă a stării( cât şi laevolu"ia for"ată a stării .
Buând acum în considerare şi ecuaţia ieşirii #+.=.=$ se constată că descompunerea #+.=.))$după sine posibilitatea descompunerii semnalului de ieşire %#t $ sub forma(
$#$#$# t %t %t % f l += , #+.=.)<$
unde ( )?$#$# et t % t 8 l
8 l
Ac2c == #+.=.)8$
defineştecomponenta liberă #de regim liber $ aie#irii , iar(
$#$#$#$#$#?
$# t dud uet dut t % t t 8
f 8
f +=+= ∫ − τ τ τ +c2c A #+.=.)C$
defineşte componenta for"ată #de regim for"at $ aie#irii .5ubliniem faptul că din punct de vedere practic , observarea semnalului %#t $ #prin măsurare,
înregistrare etc$nu permite evidenţierea separată a celor două componente %l #t $ şi % f #t $ din descompunerea#+.=.)<$. ceastă descompunere are rolul de a precizala nivel conceptual , faptul că evoluţia în timp a
semnalului de ieşire %#t $ este datorată structurii sistemului #sintetizată în matriceaA şi vectorii+, c8
şiconstanta d $ asupra căreia acţionează, pe de o parte,condi"ia ini"ială , iar pe de altă parte semnalul de intrare .2otodată trebuie remarcat că descompunerea pe stare #+.=.))$ şi pe ieşire #+.=.)<$ este posibilă liniarită"ii modelului.
7>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 36/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 37/145
( ) ( )( ) ( )
.=
7)
)?7
=7
)?=
7)
)?==?
)?)?
)?7
)
)?=?
)?)?=
)?7
)
====
====
==
)?=)?)?=)?7
)?=)?7
)?=)?
=
8=)?=
==
8=)?
=
+−+−
−−
=−−
−−−
=
−−−−
−−−−
−−
t t t t
t t t t
t t t
eeee
eeee
eeeA
#ii$ *onsiderăm &e H C??Ω , * H ?.?+ U, e H )?&86, pentru care avem matricea(
−−=
=
8
)?=>?
)??A ,
ale cărei autovalori sunt =+
=) )?$+#,)?$+# −−=+−= @ @ λ λ . 5e poate utiliza formula Bagrange&5Olves
ca mai sus la #i$, sau apelăm la următoarea proprietate a matriceieAt ( )) $# −−= AIA se -t L ,
a cărei demonstraţie poate fi găsită în #:oVtenberg, );8=$.stfel avem(
=−
+++
= − s
s s
s se :t
>?
)?)?=
)?>?)?=
) 8=
8=+)L
( )( ) .)?sin+)?cos)?sin)?>
)?sin)?)?sin+)?cos
)?$)?+#
)?+
)?$)?+#
)?+
)?$)?+#
)?)?>
)?$)?+#
)?)?
)?$)?+#
)?+
)?$)?+#
)?+
==)?+=)?+7
=)?+7==)?+
C+=
=
C+=
=
C+=
=7
C+=
=7
C+=
=
C+=
=
)
==
==
−−+
=
++−
+++
++−
+++++
+++
=
−−−
−−
−−
t t et e
t et t e
s s
s
s
s s s
s
t t
t t
L
&.*.,. D!nam!ca de "e#!m l!+e"inamica de regim liber corespunde modelului #+.=.)=$, #+.=.=$ care derivă din modelul c
#+.=.7$, #+.=.=$ pentru cazul particular al mărimii de intrare nule, adicău#t $ ≡ ?. :elaţia #+.=.)+$ careconstituie expresia lui2l #t $ împreună cu condiţia #+.=.);$ pune imediat în evidenţă comportarea dasimptotic(
?$?#lim$#lim ==∞→∞→
22 A t t
l t
et #+.=.+?$
pentru orice2#?$ &n. 5e spune că originea spaţiului &n, 2 H ?, reprezintăun punct de echilibru asimptotic stabil pe ntru sistemul considerat, în sensul că evoluţia liberă a sistemului din orice stare ini"ială 2#?$ seapropie asimptotic de punctul de echilibru.
*omportarea asimptotică a stării evidenţiate prin relaţia #+.=.+?$ se reflectă la nivelul semnaieşire prin intermediul egalităţii #+.=.=$, #sau, prelucrat #+.=.)8$$, adică avem(
?$?#lim$#lim ==∞→∞→
et % t 8 t
l t
Ac . #+.=.+)$
"n problemele practice ne interesează #intuitiv vorbind$ cât de repede- se realizează apropier2l #t $ de punctul de echilibru2 H ?. :ăspunsul la o atare întrebare se poate formula ţinând cont de manieracare evoluează către ? funcţiile dependente de timp ce compun matriceaeAt . /resupunând că matriceaA posedă nr ≤ autovalori distincte notate r i @ @ ,....,, =λ de multiplicitate r i @n @ ,....,, = , cu
nnn r =++ ...) , exponenţiala matricealăeAt poate fi scrisă sub forma(
78

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 38/145
∑=
=r
@
t @
t @et e)
$# λ MA , #+.=.++$
undeM @#t $ sunt matrice de polinoame în variabilat , având expresia(
.,...,),?,M$)#M$+#
....$#)+
)) r @nt
nt
t @n
@
n @n
@
n @n
@ @
@
@
@
@
@=≠−+−++=
−−
− MMMMM #+.=.+7$
in examinarea relaţiei #+.=.++$ rezultă,n termeni calitativi că apropierea- lui2l #t $ de2 H ? #saustingerea- regimului liber$ are loc cu atâtmai repede , cu cât valorile proprii ale matriceiA sunt situatemai
la st$nga în semiplanul complex negativ.in punct de vedere practic, se poate afirma că există unmoment finit de timp , notatt l , de la care mai
departe componentele vectorului de stare în regim liber2l #t $ sunt negli@abile ca magnitudine. reptconsecinţă, pentru valori ale timpului mai mari cat l ieşirea în regim liber %l #t $ poate fi privită ca anulându&sîn raport cu precizia observaţiei. cest fapt se poate formaliza matematic prin afirmaţia
$?#$#,(? l l l l l %t %t t t t ε ≤≥> , #+.=.+=$undeε l este o valoare subunitară mică, exprimată uzual în procente #frecvent >P sau +P$. *u cât va
r @ @ ,...,),:e =λ sunt mai mari # r @ @ ,...,),?:e =<λ $, cu atâtt l va fi mai mic. #5ubliniem faptul că îcazul unui model de tip ecuaţie diferenţială de ordinul %, se poate vorbi, prin particularizare, de oautovaloare 8 )−=λ unde 8 notează constanta de timp. "n cazul sistemelor de ordin superior, estimcantitativă a valoriit l în funcţie de valorile r i @ @ ,....,, =λ este o operaţie mult mai dificilă, care se abordeade la caz la caz, pe situa"ii concrete . in acest motiv analiza noastră anterioară s&a limitat laconstatări de facturăcalitativă $.
2ot din punct de vedere practic, legat de evoluţia în regim liber a lui2l #t $, respectiv %l #t $, mai prezintăinteres faptul că anularea componentei libere pe stare şiFsau ieşire se poate realiza în două moduri(
#i$ oscilant cu oscilaţii amortizate#ii$ aperiodic #fără oscilaţii$
"n general, prezenţa oscilaţiilor amortizate se datorează existenţei în sistemul fizic a cel puţielemente care acumuleazăenergia n forme complementare #cinetică 4 potenţială, electrică 4 magnetică$.atare structură fizică permite transferul de energie între elementele respective, în condiţiile când elemrezistive din sistem manifestăo disipare redusă . in contră, în condiţiile când elementele rezistive manifeso disipare puternică , evoluţia liberă se realizează aperiodic, indiferent de modul de acumulare a energcătre elementele sistemului.
Ba nivel calitativ , autovalorile matriceiA pot da unele indicaţii privind natura răspunsului liber stare şi ieşire(
acă toate valorile proprii suntreale #evident negative$ răspunsul liber pe stare şi ieşire va fiaperiodic .acă există valorile propriicomple con@ugate , atunci unele componente #nu neapărat toate$ ale
vectorului de stare2l #t $ şi eventual #nu neapărat$ ieşirea %l #t $ vor prezenta o comportareoscilantamortizată . 6recvenţa acestor oscilaţii este dictată de părţile imaginare,/ λ %m ale valorilor proprii / λ complex conjugate. ceste constatări sunt consecinţe directe ale exprimărilor #+.=.)+$ şi #+.=.)8$2l #t $ şi respectiv %l #t $ care fac uz de exponenţiala matricială #+.=.++$.
E2emplul &.*.,.
nalizăm răspunsul liber al sistemului din exemplul +.=.)., în care mărimea pe ieşire este tens pe bobină, conform cazului #iv$. Mărimea de intrare este nulă,e#t $ H ?, adică sursa este înlocuită printr&scurtcircuit. /rintr&un procedeu oarecare #de exemplu un experiment derulat anterior$, pentru coneste creată condiţia iniţialău #?$ H +@, iar pentru bobină este creată condiţia iniţială m)$?# = *i .
7C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 39/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 40/145
atorită liniarităţii comportării sistemului, din clasa semnalelor standardizate vor fi considerafăcând parte şi semnalele rezultate din #+.=.+>$ şi #+.=.+<$ prin multiplicări cu constante nenule .
&.*.*.&. T"ata"ea ope"a0!onal) a t"an%fe"ulu! !nt"a"e %ta"e !e !"e/entru o tratare unitară a problematicii răspunsului forţat, vom face apel la metoda operaţio
plicând transformarea Baplace ecuaţiei intrare 4 stare #+.=.)>$, se obţine($#$#$#$#$# ) s, s s, s s
f +AI =−= −
, #+.=.+8$unde $#$#,$#$# t u s, t s f f LL == 2 , iar
+AI ))
$#
$#
$#
$# −−== s sA
sA s
n
#+.=.+C$
notează o funcţie vectorială ale cărei componenteA i# s$,i H ),T, n sunt funcţii raţionale strict proprii #gradnumărătorului este strict mai mic decât gradul numitorului$ având drept numitor polinomul caractematriceiA(
$det#$# AI −= s s∆ . #+.=.+;$@om face presupunerea #care, în general, este susţinută de practică$ că numărătorii funcţiilorA i# s$,i
H ),T, n sunt funcţiineidentic nule ./rin aplicarea transformării Baplace ecuaţiei ieşirii #+.=.=$ şi ulterior, făcând uz de relaţia #+.=
obţine($#$#$#$#$#$#$#$# ) s, s sd, s, s sd, s s+ 8
f 8
f =+−=+= − +AIcc , #+.=.7?$
unde $#$# t % s+ f f L= , iar ( ) d s s. 8 +−= − +AIc )$# #+.=.7)$
notează o funcţie scalară, raţională, strict proprie pentrud H ? şi proprie #gradul numărătorului este egal gradul numitorului$ pentrud X ?, având drept numitor polinomul caracteristic∆ # s$, dat de #+.=.+;$.
6uncţia # s$ definită prin #+.=.7)$ poartă denumirea de func"ie de transfer , întrucât descrie prinmetoda operaţională, transferul în regim forţat de la imaginea semnalului de intrare, # s$, la imagineasemnalului de ieşire+ f # s$, conform ultimei egalităţi din #+.=.7?$.
E2emplul &.*.5.
*onsiderăm sistemul din 'xemplul +.=.)., în care mărimea de ieşire este tensiunea pe bobconform cazului #iv$./ornind de la modelul intrare&stare&ieşire, calculăm modelul de tip funcţie dcu ajutorul relaţiei #+.=.7)$. stfel obţinem(
[ ]
( ) ( ) [ ] =+
−
+−−
++=
=++
−−−=
−
))?
)
)
))
)
))?
)
)
)$#
+
)
* s *
1 *
& s
& *1 s * & s
* *
& s
*
1 s
& s.
e
e
eee
ee
e
=?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 41/145
( ) ( ) [ ]
( ) ( )( ) ( ) ( ) ( )
.)
))
)
)
)
))
)
+
+
+
+
eeee
ee
eeee
*1 s * & s
s
*1 s * & s
*1 s * &
*
s *1 &
*1 s * & s
++=+
++
−−=
=+−−++
=
ceasta înseamnă că între transformatele Baplace ale semnalului de intrare $#$# t e s B L= şi,respectiv, a semnalului de ieşire $#$# t u s, * * L= există următoarea legătură exprimată în scrieoperaţională
( ) ( ) $#)
$#$#$#+
+ s B
* s * & s s
s B s. s, ee
* ++== .
*ititorului familiarizat cu tratarea operaţională a circuitelor electrice îi sugerăm să prvaliditatea rezultatului de mai sus, prin următorul calcul(
$#$#$#
$#$#
$#$#$#$# s B s 2 s 2
s 2 s B
s 2 s I s 2 s, * * * * === ,
unde *# s$ şi # s$ notează impedanţele operaţionale ale bobinei şi, respectiv, a întregului circuit. *ucuvinte, funcţia de transfer din acest exemplu are semnificaţia unui factor de divizare co
# s$ H *# s$F # s$.
&.*.*.,. R)%pun%ul fo"0at la %emnale de !nt"a"e pol!nom!ale Ae vom ocupa, mai întâi, derăspunsul for"at pe stare . 5emnalele polinomiale #+.=.+>$ a
transformata Baplace # a se vedea nexa %$ de forma(
),)
$# ≥= m s s, m , #+.=.7+$
de unde rezultă, în baza egalităţii #+.=.+8$, că fiecare element al vectorului [ ] Y) $#$#$# s > s > s fn f f = are forma (
ni s
sA s >
mi
i f ...,),$#
$# == , #+.=.77$
unde semnul′ simbolizează operaţia de transpunere."ntrucât toate rădăcinile polinomului∆ # s$ sunt situate strict în semiplanul complex stâng, pen
fiecare element al lui f # s$ putem scrie
ni sA sm
A
s
A
sA s > i
im
imii f
m
,...,)$,#Z)
$)#$?#
.)
)$?#)
$?#$#
$)#
)
Y=+−++=
−
− , #+.=.7=$
unde $#Z
sA i notează o funcţie raţională strict proprie, cu numitorul∆ # s$. 2recând la originale, adicăaplicând transformarea Baplace inversă în #+.=.7=$, se observă imediat că(
( ) ( ) ( ) nit
m
A
mt A
mt
At it
mi
mi
mi fi ,...,)$,#
M)
$?#...
M+M)$?#
M)$?#$#
$)#+Y)=+−+−+−=
−−−,#+.=.7>$
unde $#Z
$# ) sAt iti −= L noteazăcomponenta tranzitorie a răspunsului forţat al stăriii, i H ), T, n, care
posedă proprietatea(nit tit
,...,),?$#lim ==∞→ . #+.=.7<$
=)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 42/145
*u alte cuvinte, pentru răspunsul forţat al stării, în exprimare vectorială, se pune în evidcomportarea de tip asimptotic(
?$#$#lim =−→∞
t t p f t
22 , [ ] [ ]Y)
Y) $#$#$#,$#$#$# t -t -t t -t -t pn p p fn f f == 22 . #+.=.78$
unde simbolul′ desemnează operaţia de transpunere.*onform #+.=.7>$, vectorul2 p#t $ are elementele definite prin funcţiile(
nit / m
t /
At t t
m
/
/ m/ i
ti fi pi ,...,)$,#$M#$M)#
$?#$#$#$#
)
$)#=−−=−= ∑
=
−−σ , #+.=.7C$
notaţia pi#t $ desemnândcomponenta permanentă a răspunsului forţat al stăriii, i H ), T, n. 5e constată căfuncţiile pi#t $copie caracteristicile fundamentale ale semnalului de intrareu#t $, fiind polinoame de grad cemultm&) în variabilă temporalăt .
"n cele ce urmează ne ocupăm derăspunsul for"at al ie#irii sistemului . :eluând procedura dedescompunere în fracţii de mai sus direct pentru+ f # s$ din #+.=.7?$, obţinem, pentru variabila de ieşscrierea(
$#$#$# t %t %t % t p f += , #+.=.7;$
unde % p#t $ şi %t #t $ noteazăcomponenta permanentă şi respectiv componenta tranzitorie a răspunsului forţat % f
#t $. "n mod similar cu cele discutate pentru stare avem(?$#lim =
∞→t %t t #+.=.=?$
şi, drept consecinţă directă(?$#$#lim =−
∞→t %t % p f t , #+.=.=)$
unde
$#
$#$)#
$?#$#
)
$)#t
/ m
t
/
t %/ mm
/
/
p σ
−−=
−
=
−∑ #+.=.=+$
conţine caracteristicile fundamentale ale semnalului de intrareu#t $.O+%e"3a0!e@ "n cazul unui semnal de intrareu#t $ treaptă #m H ) în relaţia #+.=.+>$$ componente
permanente ale stării pi#t $, i H ),T,n şi componenta permanentă a ieşirii % p#t $ sunt func"ii constante , cuurmătoarele valori(
niAt - i pi ,...)$,?#$# == , #+.=.=7$$?#$# t % p = . #+.=.==$
in acest motiv se mai utilizează denumirea devalori sta"ionare( sauvalori de regim sta"ionar . :egimulstaţionar trebuie privit drept un caz particular de regim permanent, corespunzând situaţiei #frecvent înt practică$ când semnalul de intrare este constant în timp #adică un polinom de gradul ?$. 5e constată, căstaţionar #?$ joacă rolul unei amplificări #în sensul larg de proporţionalitate$ de la valoarea conintrării, la valoarea constantă a ieşirii. e aceea valoarea#?$ este frecvent referită drept factor deamplificare al sistemului.
:elaţiile #+.=.=7$, #+.=.==$ pot fi privite şi drept consecinţe imediate ale 2eoremei valorii finanexa dedicată transformării Baplace$. stfel, deducerea lui #+.=.=7$ se pate face direct din #+.=.+8$vectorială(
( ) +A+AI22 )?
)
??$?#
)$#lim$#lim$#lim −
=−
→→∞→−=−=====
s s f
s f
t p s
s s s s st , #+.=.=7S$
unde A&) există întotdeauna, deoarece autovalorile luiA au fost presupuse ca având părţile reale stricnegative. ceastă ultimă exprimare ne arată că valorile de regim staţionar ale vectorului de stare sunt ale sistemului algebric ?) =++A2 care defineşte membrul drept al ecuaţiei stării #+.=.7$ pe
$#$# t t u σ = . rept urmare, vom avea şi nulitatea membrului stâng a lui #+.=.7$, adică ?$# =t 2 , confirmândfaptul că în regim staţionar variabilele de stare rămân constante.
=+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 43/145
5imilar se procedează şi pentru #+.=.==$, ajungând la exprimarea(
d . s
s s. s s+ t % % 8 s
f s
f t
C +−===== −→→∞→
+Ac )??
$?#)
$#lim$#lim$#lim . #+.=.==S$
E2emplul &.*.9.
*onsiderăm sistemul din exemplul +.=.)., în care mărimea de ieşire este tensiunea pe boconform cazului #iv$. 5emnalul de intrare aplicat sistemului este o treaptă de amplitudineα DD E,adicăe#t $ Hα σ #t $, iar condiţiile iniţiale sunt nule pentru condensator şi bobină. *um autovalorile matriceA au părţile reale strict negative indiferent de valorile parametrilor &e, * , e #vezi şi 'xemplul +.=.+$,rezultă căsistemul va evolua către un regim staţionar. @alorile de regim staţionar pentru variabilele de stardeterminate cu ajutorul relaţiei #+.=.=7S$, ţinând cont că amplitudinea treptei aplicate la intrare esteα , astfel(
==−−
−=−=
−
−??
))?
)
)?
)
) α α α α
* *
&
*
1 -e
e p +A .
nalog, aplicăm #+.=.==S$ cu observaţia că amplitudinea semnalului treaptă de intrare esteα şiobţinem(
( ) [ ] ?)?
))) =
+−−=+−= − α α e
8 p &d % +Ac .
*ititorul este invitat să reflecteze asupra sensului fizic al valorilor de regim staţionar calculate mai s justifice faptul că aceste valori nu depind de parametrii &e, * , e ai sistemului.
in punct de vedere practic ne interesează o cunoaştere mai detaliată aregimului tranzitoriu sub
raportul duratei finite de timp şi a prezenţeioscila"iilor amortizate . #0bservăm că această problematică reichestiuni de tipul celor deja abordate în contextul răspunsului liber, motiv pentru care este de aşte putem formula concluzii asemănătoare$.
@iteza de stingere- a componentelor tranzitorii ti#t $, i H ),T, n şi %t #t $ este dată de descreştereaexponenţialelor care intră în expresiile acestor funcţii, adică de modul de amplasare în semiplanul cstâng a zerourilor lui∆ # s$ #care constituie numitorul pentru toate imaginile Baplace luate în disc'chivalent, constatăm că durata regimului tranzitoriu va depinde de valorile proprii Ei, i H ),T, n ale matriceiA, în sensulcalitativ( cu cât valorile proprii sunt situatemai la st$nga , cu atâtregimul permanent se vainstala mai repede . Magnitudinea valorilor proprii reprezintă aşadar o măsură a inerţiei sistemMatematic putem formaliza această constatare prin afirmaţia(
$?#$#,(?t f t f f
%t %t t t t ε ≤≥>, #+.=.=>$sau, echivalent
$?#$?#$#$#,(? p f f p f f f % %t %t %t t t t −≤−≥> ε , #+.=.=<$undeε f este o valoare subunitară mică, exprimată uzual în procente #frecvent >P sau +P$. # tragem aasupra înţelegerii modului în care se generalizează problematica cunoscută de la studierea regimului unui sistem modelat printr&o ecuaţie diferenţială de ordinul %. 2otodată subliniem dificultatea obţiestimăricantitative a valoriit f şi faptul că astfel de estimări nu se formulează pe cazul general, ci pe caconcrete$.
/rezenţa, respectiv absenţaoscila"iilor amortizate pe durata regimului tranzitoriu se justifică, d punct de vedere fizic, ca şi în cazul regimului liber. 5ubraport calitativ , valorile proprii ale matriceiA pot
da unele indicaţii privind natura răspunsului forţat pe stare şi ieşire(acă toate valorile proprii suntreale #evident, negative$, răspunsul forţat pe stare şi pe ieşire nu prezenta oscilaţii amortizate.
=7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 44/145
acă există valori propriicomple con@ugate atunci unele componente #nu neapărat toate$ ale vectorulude stare 2 f
#t $ şi eventual #nu neapărat$ ieşirea % f #t $ vor prezenta o comportare oscilant amortiza
6recvenţa acestor oscilaţii este dictată de părţile imaginare, %mλ / , ale valorilor propriiλ / complexconjugate.
E2emplul &.*.:.
5tudiem răspunsul forţat la semnalul de intrare treaptă pentru sistemul din 'xemplul +.=.)., înmărimea de ieşire este tensiunea pe bobină, conform cazului #iv$. mplitudinea treptei de intrare adică sursa de tensiune furnizeazăe#t $ H +@, $,?D ∞t , iar condiţiile iniţiale sunt nule pe condensator bobină.
acă valorile parametrilor sunt &e H +???[, * H ?.?+>U, e H )?&86, atunci matriceaA areautovalorile reale E) &8=<=), E+ &>7>;. :ăspunsul forţat este aperiodic, conform reprezentărilor gradin fig. +.=.=.#a, b$, în care sunt trasate atât evoluţiile variabilelor de stare #a$, cât şi evoluţia semnieşire #b$. 5e observă că durata regimului tranzitoriu este mai mică de )?&7s, ceea ce înseamnă un interval detimp de 7&= ori mai mare decât inversul modulului autovalorii celei mai apropiate de axa imaginară,W
E+W. @alorile de regim staţionar la care ajung variabilele de stare şi semnalul de ieşire pot fi calcu
analitic, conform 'xemplului +.=.<. /entru aprofundarea aspectelor fizice ale funcţionării sistemcititorul este invitat ca, utilizând aceste reprezentări grafice, să schiţeze evoluţia tensiunii pe rezistenu &#t $şi să constate conexiunea cu evoluţia semnaleloru #t $ şiu *#t $.
0 0.2 0.4 0.6 0.8 1
x 10 -3
0
0.5
1
1.5
2
timp [s] t e n s
i u n e c o n
d e n s a
t o r
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
0
0.5
1x 10 -3
timp [s]
c u r e n
t b o b
i n a
[ A ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-0.5
0
0.5
1
1.5
2
timp [s]
t e n s
i u n e
b o
b i n a
[ V ]
6a7 6+74!#. &.*.*. :ăspunsul sistemului considerat în 'xemplul +.=.8. la un semnal de intrare treaptă cuamplitudine +@(6a7 evoluţia variabilelor de stare #prima variabilă & fereastra superioară1 a doua
variabilă & fereastra inferioară$16+7 evoluţia variabilei de ieşire.
E2emplul &.*.;.
Ae plasăm în condiţiile 'xemplului +.=.8, cu singura deosebire că pentru rezistenţă vom considvaloare de )? ori mai mică, adică &e H +?? [. Matricea A are autovalorile complex&conjuga E),+
4 =??? \ @);>;<. :ăspunsul forţat este oscilant amortizat, conform reprezentărilor grafice din fig. +#a, b$, în care sunt trasate atât evoluţiile variabilelor de stare #a$, cât şi evoluţia semnalului de ieşire #b
==

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 45/145
0 0.2 0.4 0.6 0.8 1
x 10 -3
0
1
2
3
4
timp [s] t e n s
i u n e c o n
d e n s a
t o r
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-2
0
2
4x 10 -3
timp [s]
c u r e n
t b o
b i n
a [ A ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-1.5
-1
-0.5
0
0.5
1
1.5
2
timp [s]
t e n s i u n e
b o
b i n a [ V ]
6a7 6+74!#. &.*.5. :ăspunsul sistemului considerat în 'xemplul +.=.C la un semnal de intrare treaptă cuamplitudine +@(6a7 evoluţia variabilelor de stare #prima variabilă & fereastra superioară1 a doua
variabilă & fereastra inferioară$16+7 evoluţia variabilei de ieşire.5e observă faptul că perioada oscilaţiilor este de aproximativ 7.)? &=s, în deplină concordanţă cu
valoarea +π F#%mλ ),+$. e asemenea, se observă ca durata regimului tranzitoriu este de aproximativ )&7s,ceea ce înseamnă un interval de timp de 7&= ori mai mare decât inversul modulului părţii autovalorilor, adică )FW#:eλ ),+$W. @alorile de regim staţionar la care ajung variabilele de stare şi semnieşire pot fi calculate şi analitic, conform 'xemplului +.=.<. /entru aprofundarea aspectelor fizicfuncţionării sistemului, cititorul este invitat ca, utilizând aceste reprezentări grafice, să schiţeze etensiunii pe rezistenţău &#t $ şi să constate conexiunea cu evoluţia semnaleloru #t $ şiu *#t $.
&.*.*.*. R)%pun%ul fo"0at la %emnale de !nt"a"e %!nu%o!dale Ae vom ocupa, mai întâi, derăspunsul for"at al stării sistemului . 5emnalele sinusoidale #+.=.+<$ a
transformata Baplace de forma #a se vedea nexa %$(
++$#
ω
ω
+=
s s,
, #+.=.=8$de unde rezultă, în baza egalităţii #+.=.+8$, că fiecare element al vectorului [ ]$#$#$# ) s > s > s fn f f = areforma(
ni s
sA s > i fi ,...,),$#$#++ =
+=
ω
ω . #+.=.=C$
"ntrucât toate rădăcinile polinomului∆ # s$ sunt situate strict în semiplanul complex stâng, penfiecare element al lui f # s$ putem scrie(
ni sA
s
s @A
s
@A s > iiii f ,...,)$,#Z
$E#%mD$E#:eD$#++++
=+
+
+
+
=ω
ω
ω
ω ω , #+.=.=;$
unde ω ω @ sii sA @A == $#$# cu $# sA i rezultând din #+.=.+C$, iar $#
Z sA i notează o funcţie raţională strict
proprie, cu numitorul∆ # s$. 2recând la originale adică aplicând transformarea Baplace inversă în #+.=.=observă că(
( ) ( )( ) nit @At @At tiii fi ,...,)$,#argsin$# =++= ω ω ω , #+.=.>?$
unde $#Z
$# ) sAt iti −= L notează componentatranzitorie a răspunsului forţat al stăriii, i H ), T, n, care
posedă proprietatea(nit tit
,...,),?$#lim ==∞→ . #+.=.>)$
*u alte cuvinte, pentru răspunsul forţat al stării, în exprimare vectorială, se pune în evidcomportareade tip asimptotic (
?$#$#lim =−∞→
t t p f t
22 , [ ] [ ] Y)
Y) $#$#$#,$#$#$# t t t t t t pn p p fn f f == 22 ,#+.=.>+$
=>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 46/145
unde simbolul′ desemnează operaţia de transpunere.*onform #+.=.>?$, vectorul p#t $ are elementele definite prin funcţiile(
( ) ( )( ) nit @At @At t t iiti fi pi ,...,)$,#argsin$#$#$# =+=−= σ ω ω ω #+.=.>7$
notaţia pi#t $ desemnândcomponenta permanentă a răspunsului forţat al stăriii, i H ), T, n. 5e constată căfuncţiile pi#t $copie caracteristicile fundamentale ale semnalului de intrareu#t $, fiind funcţii sinusoidale de
aceeaşi pulsaţieω ."n cele ce urmează ne ocupăm derăspunsul for"at al ie#irii sistemului . :eluând procedura dedescompunere în fracţii #+.=.=;$ de mai sus, direct pentru+ f # s$ din #+.=.7?$ obţinem, pentru variabila ieşire, scrierea(
$#$#$# t %t %t % t p f += , #+.=.>=$
unde % p#t $ noteazăcomponenta de regim permanent sinusoidal #analogă, ca formă, relaţiei #+.=.>7$$(( ) ( )( ) $#argsin$# t @.t @.t % p σ ω ω ω += #+.=.>>$
iar componenta tranzitorie %t #t $ posedă proprietatea de anulare asimptotică(
?$#lim =∞→ t %t t . #+.=.><$*u alte cuvinte, constatăm că(
?$#$#lim =−∞→
t %t % p f t , #+.=.>8$
unde % p#t $ dat de #+.=.>>$ conţine caracteristicile fundamentale ale semnalului de intrareu#t $.*a şi în cazul semnalelor de intrare polinomiale, viteza de apropiere- a lui % f #t $ de % p#t $ depinde de
modul de amplasare a valorilor proprii ale matriceiA, care astfel impundurata finită a regimului tranzitoriu#pe parcursul acestuia stingându&se- componenta %t #t $$.
O+%e"3a0!e@ eşi în regim permanent pi#t $, i H ),T, n #relaţia #+.=.>7$$ şi % p#t $ #relaţia #+.=.>>$ posedă aceeaşi pulsaţie ca şi semnalul de intrareu#t $, ele auamplitudini şi faze ini"iale diferite de ale luiu#t $."n general vorbind, la nivelcalitativ( pentru valori mari ale lui ω #adică la frecvenţe ridicate$ avemurmătoarele manifestări ale inerţiei sistemului fizic #carenu poate urmări identic semnalul sinusoidal deintrare$(
mplitudinile ni @A i ,..),$# =ω şi $# ω @. descresc la creşterea luiω .6azele iniţiale argA i# @ω $, i H ),T,n şi arg # @ω $ #adică defazajele întreu#t $ şi pi#t $, respectiv % p#t $$ senegativează tot mai mult la creşterea luiω . *u alte cuvinte, pi#t $, i H ),T, n şi % p#t $ sunt tot maiîntârziate în raport cu semnalul de intrareu#t $.
E2emplul &.*.<.
*onsiderăm sistemul din 'xemplul +.=.), în care mărimea de ieşire este tensiunea pe bobconform cazului #iv$. 5emnalul de intrare aplicat sistemului este sinusoidal, cu amplitudinea de )@forma t t u ω sin$# = , iar condiţiile iniţiale sunt nule pentru condensator şi bobină. *onform #+.=.+C$ a
++=
+
−==
−
* s
*1 *1 s * & s *
* &
s *
1 s
sA
sA sA e
eeee
)
$F)#$F#
)?
)
)
$#
$#$#
+
)
+
)
şi răspunsul forţat al stării va tinde către comportarea de regim permanent de forma #+.=.>7$(
( )
,$#$)#
)$#$#,$#argsin$#$#
+
)))))
ω ω
ω ω ω ω ω
* & @ *1
*1 sA @A @At @At
ee
e
@ s p
++−=
==+= =
=<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 47/145
( )
.$#$)#
$#$#,$#argsin$#$#
+
+++++
ω ω ω
ω ω ω ω ω
* & @ *1
* @
sA @A @At @At
ee
@ s p
++−=
==+= =
etaliind calculele se constată că avem(
( ) ( )
( ) ( )( )( ) [ ]
( )
( )∞−−−
+−−
=
++−−=
++−=
,),)a r c tg+
),?,)
a r c tg
)a r g$#a r g
,
)
)$#
+
+
+)
++++)
ee
e
ee
e
ee
ee
e
* 1 * 1
* &
* 1 * 1
* &
* & @ * 1 @A
* & * 1
* 1 @A
ω ω
ω π
ω
ω
ω
ω ω ω
ω ω
ω
şi respectiv(
( ) ( ),
)$#
+++++
ω ω
ω ω
* & *
* @A
ee ++−=
( ) ( )( )
( ) [ ]( ) ( )∞−
−
+−−
=
++−−=
.,),)
a r c t g
),?,)
a r c t g+
)a r g+
$#a r g
+
+
+)
ee
e
ee
e
ee
* 1 * 1
* &
* 1 * 1
* &
* & @ * 1 @A
ω
ω
ω
ω
ω
ω π
ω ω π
ω
/rivite prin prisma exprimării generale de forma #+.=.>7$, aceste detalii au următoarea semnfizică în raport cu regimul permanent sinusoidal care se instalează în funcţionarea sistemului(
2ensiunea pe condensator #prima variabilă de stare$ este întotdeauna defazată în urmă tensiunea furnizată de sursă, indiferent de pulsaţiaω a semnalului de intrare. cest defazaj este cuatât mai mare cu câtω este mai mare.
*urentul prin bobină #a doua variabilă de stare$ este defazat înaintea semnalului de i pentru valori mici ale luiω şi respectiv în urma semnalului de intrare, pentru valori mari ale luiω .
/entru valori mari ale luiω, atât amplitudinea tensiunii sinusoidale pe condensat$#) ω @A , cât şi amplitudinea curentului sinusoidal prin bobină $#+ ω @A sunt funcţii monoton
descrescătoare deω .5imilar procedăm pentru a studia răspunsul forţat al ieşirii, utilizând funcţia de transfer# s$ calculată
în 'xemplul +.=.>., pe baza căreia obţinem(
.$#$)#$)#$#
$#$#+
+
+
+
ω ω ω ω
ω ω * & @ *1 *1 s * & s
s s @
ee @ see @ s ++−
−=
++==
=
=
şadar, semnalul de ieşire va tinde către componenta de regim permanent definită prin #+.=.>>$=8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 48/145
( )$#argsin$#$# ω ω ω @t @t % C += ,în care
( ) ++++
+
$#$)#$#
ω ω
ω ω
* & *1 @.
ee ++−= ,
( ) ( )( ) [ ]( ) ( )∞−
−
+−−
=
=++−−−=
.,),)+
),?,)
)a r g$a r g #$#a r g
+
+
++
ee
e
ee
e
ee
* 1 * 1
* &a r c t g
* 1 * 1
* &a r c t g
* & @ * 1 @.
ω
ω
ω π
ω
ω
ω π
ω ω ω ω
3rmătoarele comentarii de natură fizică pot fi acum făcute cu privire la regimul permanent sinual semnalului de ieşire(
2ensiunea pe bobină va fi defazată înaintea tensiunii furnizată de sursa de alimenindiferent de valoarea pulsaţieiω .
/entru valori mari ale luiω , tensiunea pe bobină va fi aproximativ egală cu cea furnizatăsursa de alimentare, întrucât )$# ω @. şi ?$#arg ω @. .
"n final, recomandăm cititorului să aprofundeze aspectele fizice prezentate în acest exemplcoroborarea informaţiilor de factură teoretică din acest exemplu cu ilustrările grafice din următoareexemple.
E2emplul &.*.1=.
5tudiem răspunsul forţat la semnal de intrare sinusoidal pentru sistemul din 'xemplul +.=.)., înmărimea de ieşire este tensiunea pe bobină, conform cazului #iv$. 5ursa de tensiune furnizează se
$=???sin#$# t t u π = , iar condiţiile iniţiale sunt nule pe condensator şi bobină. @alorile considerate p parametri sunt &e H +???[, * H ?.?+>U, e H )?&8 6.
0 0.2 0.4 0.6 0.8 1
x 10 -3
-1
-0.5
0
0.5
1
timp [s]
t e n s
i u n e s u r s a
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-0.2
-0.1
0
0.1
0.2
timp [s]
t e n s i u n e
b o
b i n a
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-0.5
0
0.5
1
timp [s] t e n s i u n e c o n d e n s a
t o r
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-10
-5
0
5x 10 -4
timp [s]
c u r e n
t b o
b i n a [ A ]
6a7 6+74!#. &.*.9. *omportarea sistemului considerat în 'xemplul +.=.)? la un semnal de intrare sinusoidal de
amplitudine )@ şi frecvenţă +???Uz. *u linie întreruptă este reprezentată comportarea de regim permanentsinusoidal către care tinde semnalul respectiv, după expirarea regimului tranzitoriu(6a7 evoluţia semnaluluide intrare #fereastra superioară$ şi a semnalului de ieşire #fereastra inferioară$16+7 evoluţia variabilelor de
stare #prima variabilă & fereastra superioară1 a doua variabilă & fereastra inferioară$
=C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 49/145
*omportarea sistemului este ilustrată grafic astfel( în fig. +.=.<.#a$ este prezentată evoluţia semde intrare #fereastra superioară$ şi a semnalului de ieşire #fereastra inferioară$, iar în fig. +.=.< prezentată evoluţia variabilelor de stare. Binia întreruptă este utilizată pentru a trasa regimul persinusoidal către care tind semnalul de ieşire şi variabilele de stare. 5e observă că regimul tranzitoriu dmai puţin de )?&7s, constatare la care s&a ajuns şi în cazul răspunsului la semnal de intrare treap'xemplul +.=.8., pentru aceleaşi valori ale parametrilor &e, * , e.
in reprezentările grafice, rezultă următoarele defazaje ale semnalelor de interes în rapotensiunea furnizată de sursă(
tensiunea pe condensator este defazată în urmă cu aproximativ <>o1curentul pe bobină este defazat înainte cu aproximativ )?o1tensiunea pe bobină este defazată înainte cu aproximativ )??o.
E2emplul &.*.11.
Ae plasăm în condiţiile 'xemplului +.=.)?, cu singura deosebire că pentru rezistenţă vom considvaloare de )? ori mai mică, adică &e H +?? [. *omportarea sistemului este ilustrată grafic prin fig. +.=unde în #a$ este prezentată evoluţia semnalului de intrare #fereastra superioară$ şi a semnalului #fereastra inferioară$, iar în #b$ este prezentată evoluţia variabilelor de stare.
0 0.2 0.4 0.6 0.8 1
x 10-3
-1
-0.5
0
0.5
1
timp [s]
t e n s i u n e s u r s a
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-1
-0.5
0
0.5
1
timp [s]
t e n s i u n e
b o
b i n a [ V ]
0 0.2 0.4 0.6 0.8 1
x 10-3
-2
-1
0
1
2
timp [s] t e n s i u n e c o n d e n s a
t o r
[ V ]
0 0.2 0.4 0.6 0.8 1
x 10 -3
-4
-2
0
2
4x 10
-3
timp [s]
c u r e n t b o
b i n a [ A ]
6a7 6+74!#. &.*.:. *omportarea sistemului considerat în 'xemplul +.=.)) la un semnal de intrare sinusoidal de
amplitudine )@ şi frecvenţă +???Uz.. *u linie întreruptă este reprezentată comportarea de regim permanentsinusoidal către care tinde semnalul respectiv, după expirarea regimului tranzitoriu(6a7 evoluţia semnaluluide intrare #fereastra superioară$ şi a semnalului de ieşire #fereastra inferioară$16+7 evoluţia variabilelor de
stare #prima variabilă & fereastra superioară1 a doua variabilă & fereastra inferioară$Binia întreruptă este utilizată pentru a trasa regimul permanent sinusoidal, către care tinde sem
de ieşire şi variabilele de stare. 5e observă că regimul tranzitoriu durează aproximativ )?&7s, constatare lacare s&a ajuns şi în cazul răspunsului la semnal de intrare treaptă din 'xemplul +.=.C., pentru acelea
ale parametrilor &e, * , ein reprezentările grafice rezultă următoarele defazaje ale semnalelor de interes în raportensiunea furnizată de sursă(
tensiunea pe condensator este defazată în urmă cu aproximativ )>o1curentul prin bobină este defazat înainte cu aproximativ 8?o1tensiunea pe bobină este defazată înainte cu aproximativ )<?o.
&.5. E2t!nde"! ale modelelo" l!n!a"e !nt"a"e %ta"e !e !"e
"n această secţiune prezentăm două tipuri de modele liniare care extind, într&o manieră naturală, conreprezentare intrare&stare&ieşire discutat în secţiunea precedentă. Aecesitatea unei atare extinilustrată prin exemple de sisteme fizice pentru care descrierea matematică a dinamicii nu poate fi abnumai pe seama cunoştinţelor prezentate în secţiunea anterioară.
=;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 50/145
&.5.1. $!%teme cu ma! multe !nt")"! ! %au ma! multe !e !"! 6$!%teme mult!3a"!a+!le7/ână în acest punct al discuţiei noastre asupra modelelor cauzale, am considerat că sistemele
luate în discuţie sunt excitate de o singură mărime cauză #semnal de intrare$ şi furnizează o singurăefect #semnal de ieşire$. "n multe situaţii practice însă ne confruntăm cu sisteme fizice care pot amulte mărimi cauză şiFsau mai multe mărimi efect. Modelele de tip reprezentare de stare sunt capdescrie funcţionarea unor atare sisteme, prin generalizarea ecuaţiilor vectorial matriceale #+.=.7$ şi #
aşa manieră încâtu#t $ şiFsau#t $ să fie funcţii vectoriale cum şi respectiv p componente( pm t t R R R R →→ ++ ($#,($# yu . #+.>.)$
stfel ecua"ia stării #+.=.7$ se va generaliza sub forma(
?$?#$1#$$##$# 22Bu2A2 =+= t t t , #+.>.+$iar ecua"ia ie#irii #+.=.=$ se va generaliza sub forma(
$#$#$# t t t DuC2 += , #+.>.7$în care matricele coeficienţilor au dimensiuni adecvate(
m pn pmnnn ×××× R DR CR BR A ,,, . #+.>.=$
"n mod corespunzător, se va generaliza expresia #+.=.)?$ a răspunsului complet pe stare(
∫ −+= t t t eet ?
$# $#$?#$# τ τ Bu22 AA . #+.>.>$
mbii termeni ai sumei din #+.>.>$ îşi păstrează aceeaşi semnificaţie #componentă de regim lrespectiv, componentă de regim forţat$ ca şi în paragraful +.=.+ unde sistemul a fost considerat cu omărime de intrare, adică R R →+($#t u . "nlocuirea lui2#t $ dat de #+.>.>$ în ecuaţia ieşirii #+.>.+$ va furăspunsul complet pe ie#ire , care generalizează situaţia discutată în paragraful +.=.+.
'lementele de analiză a dinamicii de regim liber şi de regim forţat prezentate anterior, în parag+.=.7 şi, respectiv, +.=.=, pentru sisteme cu o singură mărime de intrare şi o singură mărime de iegeneralizează, în mod natural, pentru sistemele cu mai multe intrări şiFsau mai multe ieşiri. ezvoteoretice privind răspunsul forţat la semnale standard devin însă mult mai ample în cazul sistemelor multe mărimi de intrare, motiv pentru care nu vom intra în atare detalii. 5ingurul aspect la care ne voîl constituie modelul intrare&ieşire de tip matrice de transfer, care extinde conceptul de funcţie de introdus în subparagraful +.=.=.+. stfel, aplicând transformata Baplace #pentru condiţii iniţiale specifice regimului forţat$ ecuaţiei stării #+.>.+$, obţinem(
$#$#$# ) s s f BUA%I −−= , #+.>.<$
care generalizează #+.=.+8$, iar f # s$ se înlocuieşte în ecuaţia ieşirii #+.>.7$, de unde rezultă($#$#$#E$#D$# ) s s s s f UEUDBA%ICF =+−= − , #+.>.8$
care generalizează #+.=.7?$. Matricea cu p linii şim coloane(DBA%ICE +−= −)$#$# s , #+.>.C$
care generalizează scrierea #+.=.7)$, poartă denumirea dematrice de transfer asociată reprezentării de staremultivariabile #+.>.+$ şi #+.>.7$. 6iecare componentă i@ # s$,i H ), T, p, @ H ), T, m a matricei # s$ este ofuncţie scalară #strict proprie dacăd i@ ≠ ?, sau proprie dacăd i@ H ?, unded i@ notează elementele matriceiD$,care are drept numitor #înainte de efectuarea unor eventuale simplificări$ polinomul caracteristic∆ # s$ almatriceiA, dat de #+.=.+;$. 6iecare componentăi@# s$ trebuie interpretată ca o funcţie de transfer #accepţiunea discutată în subparagraful +.=.=.+$ ce descrie legătura dintre variabila de ieşire %i#t $,i H ), T, p, şivariabila de intrareu @#t $, @ H ), T, m, în maniera operaţională(
$#$#$# t u st % @i@i LL = , #+.>.;$atunci când toate celelalte variabile de intrare sunt nule, adică(
$,?D,?$#$#$#$# ))) ∞===== +− t t ut ut ut u m @ @ . #+.>.)?$>?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 51/145
E2emplul &.5.1.
*onsiderăm sistemul termic a cărui structură şi funcţionare sunt prezentate în secţiunea 8.). #iîncălzită cu radiator$ din *apitolul 8. *onform fig. 8.).), asupra sistemului acţionează drept mărimintrare fluxul termic C r #t $ produs de rezistorul electric şi temperatura mediului exterior8 m. rept mărimi de
ieşire se consideră temperatura8 r #t $ a radiatorului şi temperatura8 #t $ a incintei.legem drept variabile de stare mărimi ce caracterizează acumulările de energie din sistemanume(
cantitatea de căldură din radiator #notată cuA+$1cantitatea de căldură din incintă #notată cuA<$.
/recizăm că temperaturile luate în discuţie sunt raportate la o aceeaşi temperatură de referinţăconvenţional poate fi considerată nulă 4 fără a i se atribui însă semnificaţia fizică corespunzătoare lKelvin$.
plicând legile fizicii, se ajunge la o reprezentare intrare&stare&ieşire, de forma(
,)?
?)
))))
))
<
+
)))
)))
<
+ +
+−
−=m
r
t t t t t t
t t t t
8
C
&A
A
& &1 1 &
1 &1 &
A
A
=<
+))
?
?)
A
A
1
1 8
8
t
t r .
Ae limităm numai la prezentarea formei finale a modelului intrare&stare&ieşire aferent siconsiderat şi nu detaliem maniera de construcţie a acestui model, deoarece o atare detaliere face osecţiunii 8.)., prin aplicarea metodei bond&graph.
Modelul obţinut este de forma #+.>.+$ şi #+.>.7$ cun H +,m H +, p H +./rin aplicarea relaţiei #+.>.C$, se obţine matricea de transfer(
+
−
++
+
+++
=
t t t t t t t
t t t t t t t t
t t t t t t t t t t 1 &1 & s
1 1 &
1 1 & & & &1 s
1
1 1 & & s
1 &1 &1 & s
s.)))
)))))
))))
)$#
)))
))))
)))))
+.
*omentarii asupra dinamicii sistemului se găsesc în secţiunea 8.). din *apitolul 8.
&.9. Modele nel!n!a"e !nt"a"e %ta"e !e !"e
"n numeroase cazuri, descrierile de tip liniar prezentate în capitolele precedente se dovedesc a modele cu imprecizii destul de mari, fiindcă nu pot surprinde comportări eminamente neliniare. "sens, prin generalizarea reprezentărilor liniare intrare&stare&ieşire, au fost dezvoltate modelele ce ufi prezentate în secţiunea de faţă. /e lângă problematica aferentă utilizării modelelor neliniare se va abconstruirea aproximaţiilor liniare, valabilă pentru variaţii mici ale semnalelor, considerate în jurul pu
staţionare de funcţionare.&.9.1. Rep"e(ent)"! nel!n!a"e de %ta"e
0 reprezentare neliniară de stare,invariantă n timp are forma(
>)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 52/145
( ) ,$?#,$#$,#$# ?22u2f 2 == t t t #+.<.)$
( )$#$,#$# t t t u2# = , #+.<.+$unde(
vectorul nt R 2 $# notează vectorul variabilelor de stare1vectorul mt R u $# notează vectorul variabilelor de intrare #continuu pe porţiuni$1vectorul pt R $# notează vectorul variabilelor de ieşire1
nmn R R R f →×( este o funcţie continuă, global lipschitziană în raport cu nt R 2 $# 1 pmn R R R # →×( este o funcţie continuă.
'cuaţia diferenţială vectorială #sau sistemul de ecuaţii diferenţiale$ #+.<.)$ poartă denumiecua"ia stării #sau a transferului intrare&stare$. 'a reprezintăe tinderea n formulare neliniară a cazuluiliniar cunoscut din paragraful anterior(
?$?#$,#$#$# 22BuA22 =+= t t t , #+.<.7$cu nn×R A şi mn×R B .
'cuaţia algebrică #+.<.+$ poartă denumirea deecua"ia ie#irii . 'a reprezintă e tinderea n formulareneliniară a cazului liniar cunoscut din(
$,#$#$# t t t DuC2 += #+.<.=$cu n p ×R C şi m p×R D .
tragem atenţia asupra faptului căinvarian"a n timp înseamnă că funcţiile f şi g din #+.<.)$ şi #+.<.+nu depind e plicit de variabila temporalăt . *u alte cuvinte, funcţiile neliniaref şi # posedă coeficienţiconstanţi #generalizând situaţia organizării matriceale, din cazul liniar #+.<.7$ şi #+.<.=$$.
eşi descrierea neliniară de stare #+.<.)$, reprezintă o generalizare a descrierii liniare de stare #tranziţia cauzală intrare&stare nu poate fi exprimată analitic în cazul neliniar prin formule generalizeze relaţia #+.=.)?$ prezentată în cazul liniar. e fapt, problematica rezolvării sistemelor de diferenţiale neliniare de forma #+.<.)$ este mult mai complexă şi, în marea majoritate a situaţiilor cse recurge la metode numerice pentru determinarea funcţiei vectoriale necunoscute2#t $ din #+.<.)$.
2rebuie însă remarcat faptul că modul de clasificare a răspunsurilor #liber, forţat, complet$ iîn secţiunea +.= pentru reprezentările liniare intrare&stare&ieşire, îşi păstrează semnificaţia şi în cazudeoarece, la nivel conceptual, această clasificare nu implică determinarea propriu&zisă a vectorulu2#t $ din #+.<.)$.
stfel, dacă toate mărimile de intrare sunt nule , adică, în scriere vectorialău#t $ H ?, atunci sistemulevoluează în timp numai ca efect alcel pu"in unei condi"ii # stări $ ini"iale nenule , în scriere vectorială2#?$≠ ? şi avem de a face cu răspunsul liber al sistemului, uzual notat2 l #t $. acă toate stările #condi"iile $ini"iale sunt nule , în scriere vectorială2#?$≡ ?, atunci sistemul evoluează în timp numai ca efect al cel puunei mărimi de intrare nenule , în scriere vectorialău#t $≠ ? şi avem de a face curăspunsul for"at alsistemului, uzual notat2 f #t $. "n cazul când cel puţino variabilă de stare #condi"ie $ ini"ială este nenulă , înscriere vectorială2#?$≠ ? şi cel pu"in o variabilă de intrare este nenulă , în scriere vectorialău#t $≠ ?, avemde a face curăspunsul complet al sistemului.
atorită neliniarităţii, principiul superpozi"iei efectelor nu poate fi aplicat pentru dinamica sistemelorneliniare. *u alte cuvinte, dacă2#t $ notează răspunsul complet pentru un anumit2#t $≠ ? şi un anumitu#t $≠ ?, atunci egalitatea(
$#$#$# t t t f l 222 +=
nu este n general adevărată #spre deosebire de cazul sistemelor liniare$.
E2emplul &.9.1.
Ae plasăm în contextul sistemului mecanic din 'xemplul +.7.), al secţiunii +.7, cu singura deoscă forţa elastică din resort prezintă o dependenţă neliniară în raport cu deformarea acestuia, de forma(
>+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 53/145
?,, 7)7
7) >+= / / / / ' e .
:ezultă că deplasarea punctului va fi modelată prin ecuaţia diferenţială neliniară(
$#$#$#$# 77) t ' t -/ t -/ t - =++γ ,
care, scrisă în maniera(
( ) ( ) γ γ γ $#$#$#$# 77) t ' t / t / t +−−= ,
este un caz particular al reprezentării de stare #+.<.)$ cun H ) şim H ).
E2emplul &.9.&.
*onsiderăm sistemul mecanic a cărui structură şi funcţionare sunt prezentate în 'xemplul <.).*apitolul <, secţiunea <.). *onform fig. <.).);, asupra sistemului acţionează mărimile de intrare(u)#t $ egalăcu cuplul motor M m#t $ şiu+#t $ egală cu forţa de frecare ' . rept mărime de ieşire %#t $ se consideră vitezav#t $a pistonului.
legem următoarele variabile de stare(
deplasarea unghiulară a manivelei #notată $1viteza unghiulară a manivelei #notatăω $.plicând legile mecanicii, se ajunge la reprezentarea neliniară intrare&stare&ieşire(
( ) ( )( )
( )( )( ) ( ) ( )+
++
−+
−=
=
,$#
$#
$#$#
$#$#
$#
$#$#$#
$,#$#
++
++
+ t m 9 F
t M
t 9 t m 9 F
t ' 9 t
t m 9 F
t t m 9 t
t t
m
ω
α ω
ω
( ) $#$#$# t t 9 t v ω = ,unde 9 şi α notează următoarele funcţii în variabila (
,sincos)sin$# +++ −+−= &l & & 9 # 7,=$# M8' 9 9 = & cu notaţia de la 'xemplul <.).7$,
( ) ( ) +7++++=++ sin+cossincos$#−
−+−−==
α &l l & & &d d9
Ae limităm numai la prezentarea formei finale a modelului intrare&stare&ieşire aferent siconsiderat şi nu detaliem maniera de construcţie a acestui model, deoarece o atare detaliere face o'xemplului <.).7, prin aplicarea metodei bond&graph.
5e constată imediat faptul că modelul obţinut este de forma #+.<.)$ şi #+.<.+$ şi nu admite oliniară vectorial&matriceală de tipul #+.<.7$ şi #+.<.=$.
&.:. Modele de t!p d!a#"am) +loc
cest tip de modele au drept caracteristică fundamentală faptul că descriu tranziţia cauzală inieşire printr&ocombina"ie de elemente grafice cu formulări analitice , ce oferă un suport intuitiv de marevaloare pentru înţelegerea modului de procesare a semnalelor şi a interac"iunilor ntre subsistemelecomponente ale unui sistem fizic. spectele semnalate mai sus fac ca, în aplicaţiile tehnico&inginediagramele bloc să fie adesea preferate modelelor ce furnizează o descriere pur analitică a funcţ
sistemelor #în limbajul ecuaţiilor diferenţiale sau al reprezentărilor operaţionale cu ajutorul transfBaplace$. "ntr&un atare context, în ultima perioadă de timp, mai multe firme producătoare de soft!are pentru simulare, au dezvoltat simulatoare care operează direct cu modelele de tip diagramăMai precizăm în acest punct #urmând ca detaliile să apară pe parcursul secţiunii curente$ că m
>7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 54/145
diagramă bloc sunt echivalente cu modelele pur analitice, existând procedee standard de conversie a de model în celălalt.
&.:.1. D!a#"ame +loc cu +locu"! de%c"!%e 'n domen!ul t!mp3n bloc descris în domeniul timp se reprezintă grafic conform fig. +.8.) şi exprimă tranziţia cau
( )$#,$,#$# ) t ut uG t % m= #+.8.)$
de la semnalele de intrare ale bloculuiu)#t $, T, um#t $ #marcate printr&o săgeată care intră în bloc$, la sem
de ieşire al blocului %#t $ #marcat printr&o săgeată care iese din bloc$. "n relaţia #+.8.)$, simbolulG noteazăoperatorul care, aplicat funcţiilor dependente de timu)#t $, T, um#t $ defineşte funcţia dependentă de tim
%#t $. 3zual, este întrebuinţată următoarea convenţie dreprezentare grafică(a$ acă G este un operator liniar, atunci conturu
blocului se trasează printr&o singură linie, cafig. +.8.) #a$1
b$ acă G este un operator neliniar, atunci conturu blocului se trasează printr&o linie dublă, ca în fig. +.8.) #b$.
"n cele ce urmează vom prezenta blocurile cele mai frecvent utilizate în activitatea de modînsoţite de reprezentări grafice aferente.
Blocul de tip proporţional #fig. +.8.+$ 4 bloc liniar 4 posedă un singsemnal de intrare şi exprimă relaţia cauzală #discutată deja în secţiu+.)$(
,?$,#$# ≠= t ut % #+.8.+$adică operatorulG se defineşte ca produs al semnalului de intrare cu o constantă nenulă, conform cunoscute de la modelul de tip proporţional din secţiunea +.+.
Blocul de tip integrator #fig. +.8.7$ 4 bloc liniar 4 posedă o singură intrare şi exprimă relaţia ca#discutată deja în secţiunea +.+$(
,?$,?#$#)$#? ≠+= ∫ t 1 %d u
1 t % τ τ #+.8.7$
adică operatorulG calculează, o primitivă a luiu#t $, sau, echivalent aresemnificaţia de soluţie a ecuaţiei diferenţiale #+.+.)$ ce definmodelul de tip integrator, conform celor cunoscute din secţiunea *ondiţia iniţială %#?$ #existentă pe integrator$ nu trebuie privită drmărime de intrare #deşi, în simbolizarea grafică, îi este asociat
săgeată$, deoarece ea esteo constantă asociată momentului convenţional de timp t H ?, şi nu are semnificaţiade semnal #cu evoluţie în timp$ procesat de blocul integrator. tragem atenţia asupra faptului că, însituaţii, constanta %#?$ poate lipsi din e primarea grafică , situaţie când există două modalităţi d
interpretare, asociate contextului(acă interesul este legat numai de studierea răspunsului forţat, atunci se consideră %#?$ H ?.Dacă interesul este legat de studierea răspunsului complet, va trebuisubînţeleasă existenţa valorii y (0) ≠ 0.
Blocul de tip derivator #fig. +.8.=$ 4 bloc liniar 4 posedă o intrare şi exprimă relaţia cau#discutată deja în secţiunea +.+$(
,?,$#
$# ≠= 1 dt
t du1 t % #+.8.=$
adică operatorulG calculează derivata luiu#t $, sau, echivalent, aresemnificaţia de model derivator, conform celor cunoscute din secţiu
+.+. "n spiritul comentariilor de la modelul de tip derivator, recomandăm evitarea folosirii bloderivatoare, ori de câte ori putem apela la alte soluţii pentru a descrie procesarea semnalelor. Blocul de tip sumator #fig. +.8.>$ 4 bloc liniar 4 posedă cel puţin două intrări şi exprimă r
cauzală(
>=
G u) #t $
%#t $um#t $G
u) #t $ %#t $
um#t $
6a7 6+74!#. &.:.1. :eprezentarea grafică a unui bloc descris în
domeniul timpului prin operatorul G -(6a7 operatorulG este liniar16+7 operatorulG este neliniar
u#t $ %#t $
4!#. &.:.&. :eprezentarea grafică a blocului de tip proporţional
t
?
)u#t $ %#t $
%?#t $
4!#. &.:.,. :eprezentarea grafică a blocului de tip integrator
dt d
1 u#t $ %#t $
4!#. &.:.*. :eprezentarea grafică a blocului de tip derivator

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 55/145
$#$#$# ) t ut ut % m±±±= , #+.8.>$unde fiecare din semnaleleui#t $,i H ), T, m este precedat de unul din semnalele R sau 4.
stfel operatorul G se defineşte prin suma algebrică a semnalelor de intrare, în conformitatsemnalul ataşat fiecăruia dintre ele. :eprezentările grafice din fig. +.8.>.#a$, #b$ şi #c$ sunt echivalen
u) #t $
%#t $
um#t $
u) #t $ %#t $
um#t $
6a7 6+7
u) #t $
%#t $
um#t $
6c7
4!#. &.:.5. :eprezentări grafice echivalente pentru blocul de tip sumator
Blocul de tip înmulţitor #fig. +.8.<$ 4 bloc neliniar 4 posedă cel puţin două intrări şi exprimă rcauzală(
$#$#$# ) t ut ut % m××= , #+.8.<$adică operatorulG se defineşte ca produs al semnalelor de intrare. :eprezentările grafice din fig. +.8.< #b$ sunt echivalente.
u) #t $ %#t $
um#t $]
u) #t $ %#t $
um#t $
6a7 + Fu) #t $
%#t $u+#t $
4!#. &.:.9. :eprezentările grafice echivalente pentru blocul de tip înmulţitor
4!#. &.:.:. :eprezentarea grafică a bloculde tip împărţitor
Blocul de tip împărţitor #fig. +.8.8$ 4 bloc neliniar 4 posedă două intrări şi exprimă relaţia cauza,?$#,$#$#$# ++) ≠= t ut ut ut % #+.8.8$
adică operatorulG se defineşte ca raportul dintre semnalul de intrare cu indicele ) şi semnalul de intra
indicele+ #în ipoteza neanulării acestuia din urmă$.^locurile prezentate anterior se caracterizează prin aceea că operatoriiG ce le corespundimplementează relaţii cauzale simple, de bază, care nu pot fi descrise mai detaliat prin utilizareoperatori, mai simpli. in acest motiv, construirea unor diagrame bloc care folosesc numai blocurile dsus asigură maximum de detaliere în modelarea procesării semnalelor şi a interacţiunii subsistecomponente ale unui sistem dat.
E2emplul &.:.1.
5e consideră sistemul mecanic din 'xemplul +.7.)., cu reprezentarea schematizată din fig. +Modelul de tip ecuaţie diferenţială de ordinul %, cu coeficienţi constanţi, care descrie funcţionarea
poate fi retranscris sub forma([ ] ?? $#,$#$#)$# t t ' t / t e =+−=
γ ,
ceea ce înseamnă că #t $ se poate exprima(
∫ += t
t t d 0t
?$#$#
)$# ?τ τ
γ ,
unde am folosit notaţia $#$#$# t ' t / t 0 e +−= .*onstatăm imediat că relaţia de mai sus care îl defineşte
#t $ este exact de forma #+.8.7$, caracterizând un bintegrator cu ieşirea #t $ şi intrarea0 #t $. /e de altă parte0 #t $ poate fi privit ca ieşire a unui bloc sumator de tip
#+.8.>$, cu intrările R ' #t $ şi 4 / e #t $. ar semnalul #t $ este deja disponibil în construcţia noastră #ca ieşir blocului integrator$ şi utilizarea lui drept intrare pentru un bloc proporţional de forma #+.8.+$, cu fa
>>
$#$# t -t 0 γ =
/ e
' #t $ - #t $
- #t ?$
forţaexterioară
/ e - #t $
deplasare
forţa elastică
forţa defrecare
R
4 ∫ t t ?
)γ
4!#. &.:.;. Modelul de tip diagramă bloc al
sistemului mecanic din 'xemplul +.8.)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 56/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 57/145
/ână la acest punct, exemplele considerate au urmărit modul de construire a diagramelor bloc psistemele cu comportare liniară, modelele astfel obţinute conţinând numai blocuri de tip lincontinuare vom exemplifica şi modul de utilizare a blocurilor neliniare pentru modelarea funcţsistemelor cu dinamică neliniară.
E2emplul &.:.,.
5e consideră sistemul hidraulic din 'xemplul +.<.+, cu reprezentarea schematizată din fig. +.<.întâi vom construi un model tip diagramă bloc pentru funcţionarea sistemului în condiţii de semnal mare ,când curgerea prin robinetul de golire este turbulentă, pornind de la următoarea formă a modelului an
?? $#$,#)
$#)
$# H t H t AG
t H / g
G t H =+−= ρ ,
care a fost dedusă în 'xemplul +.<.+. stfel, H #t $ se poate exprima(
∫ += t t H d 0
G t H
? ? $#$#)
$# τ τ ,
unde am folosit notaţia $#$#$# t At H / g t 0 +−= ρ . *onstatăm imediat că relaţia de mai sus care îdefineşte pe H #t $ este exact de forma #+.8.7$, caracterizând un bloc integrator cu ieşirea H #t $ şi intrarea0 #t $. /ede altă parte0 #t $ poate fi privit ca ieşire a unui bloc sumator de tipul #+.8.>$ cu intrările RA#t $ şi
$#t H / g ρ − . ar semnalul H #t $ este deja disponibil în construcţia noastră #ca ieşire a blocului integratutilizarea lui drept intrare într&un bloc neliniar care extrage radicalul de ordinul doi permite obţinerea$#t H #funcţionarea sistemului asigurând ?$# ≥t H $. "n continuare, semnalul $#t H plasat la intrarea unui bloc proporţional de forma #+.8.+$ cu factorul de proporţionalitate/ g ρ va furniza exact semnalul ce trebuieaplicat pe intrarea cu semnul 4 a sumatorului. stfel obţinem modelul tip diagramă bloc din fig. +.8.)?.
"n schema bloc din fig. +.8.)?, putem înlocui blocul proporţional / g ρ şi blocul neliniar de extragerea radicalului, conform fig. +.8.)), ceea ce permite să punem în evidenţă presiunea la baza rezervorul C #t $ precum şi relaţia neliniară $#F)$#? t C / t A = ce descrie curgerea turbulentă, undeA?#t $ notează debitul degolire.
A?#t $ $#t H
$#$# t H G t =A#t $ H #t $
H #t ?$
debit deumplere
înălţimeafluidului
debit degolire
R
4 ∫ t t G ?
)
/ g ρ
$#t C
$#t H G A#t $ H #t $
H #t ?$
A? #t $
R 4
∫ t t G ?
)
/ ) C #t $
g
:elaţia neliniară specificăcurgerii turbulente
4!#. &.:.1=. Modelul de tip diagramă bloc al sistemuluihidraulic din 'xemplul +.8.7, pentru variaţii mari ale
variabilelor #semnal mare$
4!#. &.:.11. 2ransformarea diagramei blocdin fig. +.8.)? care pune în evidenţă
variabila C #t $
Ae ocupăm acum de construcţia modelului tip diagram bloc pentru funcţionarea sistemului în condiţii de semnalmic #sau mici variaţii$. /ornim de la modelul de tip ecuadiferenţială de ordinul %, liniară, cu coeficienţi constadedus în exemplul +.<.7(
$#$#$# t J &t ght hG f =+ ρ ,care este pus sub forma(
>8
$#t hG J #t $ h#t $
h#t ?$
J ?#t $
R
4 ∫ t t G ?
)
f &) p#t $
g
:elaţia liniară specificăcurgerii laminare
4!#. &.:.1&. Modelul de tip diagramă bloc asistemului hidraulic din 'xemplul +.8.7 pentru
variaţii mici ale variabilelor #semnal mic$

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 58/145
[ ] G t GJG &t h g t h f $#$#$# +−= ρ .3rmând pilda de construcţie din prima parte a exemplului curent, vom ajunge la schema bloc din fig. *omparând modelul de semnal mic din fig. +.8.)+ cu modelul de semnal mare din fig. +.8.)), constatsingurele diferenţe se referă la notarea cu literă mică, respectiv literă mare a semnelor şi la descrierearespectiv neliniară a curgerii prin robinetul de golire.
^locurile utilizate în construirea diagramelor bloc din exemplele anterioare s&au caracteriz
aceea că operatoriiG asociaţi corespundeau unor operaţii elementare. "n general, pot fi concepute bl pentru care operatorii 5 asociaţi descriu succesiuni de operaţii, adică expresii. Modelele tip diagramconstruite astfel nu mai oferă toate detaliile privitoare la procesarea semnalelor şi interacţiunilesubsisteme.
E2emplul &.:.*.
5ă considerăm un sistem cu dinamică neliniară descris printr&o reprezentarea intrare&stare&forma #+.<.)$ şi #+.<.+$ cun H 7,m H +, p H +. etaliind ecuaţiile vectoriale, vom obţine următorul set ecuaţii de stare(
$,,,,# +)7+))) uu - - - f - = ,$,,,,# +)7+)++ uu f = ,$,,,,# +)7+)77 uu f =
şi două ecuaţii de ieşire($,,,,# +)7+))) uu g % = ,$,,,,# +)7+)++ uu g % = .
6ără a preciza expresiile funcţiilor f i, i H ), +, 7 şi g @, @ H ), + putem construi un model de tip diagramă bloutilizând trei integratoare #corespunzător numărului de variabile de stare$ şi blocuri neliniare definimanieră generală, tocmai prin funcţiile f i şi g @. :ezultatul acestei construcţii este prezentat în fig. +.8.)7.
$#+ t
g )
f )
f +
f 7
∫ t t ?
∫ t t ?
∫ t t ?
•
•
•
$#) t
$#7 t
u ) #t $
u+#t $
%) #t $
%+#t $
) #t $
+#t $
7#t $7#t ?$
+#t ?$
) #t ? $
g )
4!#. &.:.1,. Modelul tip diagramă bloc al sistemului neliniar considerat în 'xemplul +.8.=
"ncheiem acest paragraf prin a sublinia faptul că modalitatea de construcţie a diagrameloilustrată prin exemplele de mai sus conţine şi informaţiile necesare pentru abordarea problematicii iadică scrierea sub formă analitică a uneireprezentări intrare-stare-ie#ire( pornind de la un model de tipdiagramă bloc , disponibil. stfel, ieşirile blocurilor integratoare definesc variabilele de stare, iar scriecuaţiilor de stare revine la explicitarea derivatelor variabilelor de stare care sunt definite tocmai de i
>C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 59/145
blocurilor integratoare #eventual multiplicate cu o constantă$. ceastă explicitare va consta în deslegăturilor cu variabilele de stare şi semnalele de intrare, cu un nivel de detaliere permis de opeasociaţi blocurilor.
&.:.&. D!a#"ame +loc cu +locu"! de%c"!%e 'n domen!ul comple2"n cazul blocurilor liniare prezentate în paragraful anterior, tranziţia cauzală realizată de oric
poate fi formulată şi în domeniul complex, ca o legătură între transformata Baplace a semnalului de
transformata #transformatele$ Baplace ale semnalului #semnalelor$ de intrare. ceastă modalireprezentare se datorează proprietăţii de liniaritate a transformării Baplace, permiţând descriereaoperaţional a blocurilor din tabelul +.8.).
Ta+elul &.:.1. escrierea în limbaj operaţional, cu ajutorul transformatei Baplace, a tranziţiei cauzalintrare&stare&ieşire pentru blocurile liniare
2ipul blocului
'xpresia analitică îndomeniul complex
:eprezentarea grafică îndomeniul complex
escriere îndomeniul timp
/roporţional ?$,#$# ≠= 1 s1, s+ , #s$ + # s$ ec. #+.8.+$
fig. +.8.+
%ntegrator $?#)
$#)
$# % s
s, 1s
s+ +=s), #s$ + # s$
%#?$ec. #+.8.7$fig. +.8.7
erivator ( ) $#$# s, 1s s+ = s, #s$ + # s$ ec. #+.8.=$
fig. +.8.=
5umator ...$#$# ) , s, s+ m±±±= + # s$, m# s$
+ # s$, ) # s$, ) # s$
, m# s$ec. #+.8.>$fig. +.8.>
E2emplul &.:.9.
5e consideră sistemul electric din 'xemplul +.=.), cu reprezentarea grafică din fig. +.=.), care referit şi în 'xemplul +.8.+ din paragraful anterior al acestei secţiuni. Modelul de tip diagramă bdescriere operaţională este prezentat în fig. +.8.)=, considerând drept mărime de ieşire tensiunea pe bo
şa cum era de aşteptat, funcţiile de transfer ale blocurilor au semnificaţia fizică #binecunoscuteoria circuitelor electrice$ de impedanţe complexe # &e, )F# e s$$ şi de admitanţe complexe #)F# *s $$.
/ornind de la o diagramă cu blocuri liniare în descriere operaţională de tipul celor din tabelul +.
poate construi o reprezentare intrare&stare&ieşire, prin parcurgerea următorilor paşi(). 5e aleg drept variabile de stare #în reprezentaoperaţională$ ieşirile blocurilor integratoare.
+. 5e scrie câte o ecuaţie în imagini Baplace pentfiecare variabilă de stare, având variabila de stare izolatămembrul stâng, iar membrul drept detaliind #confodiagramei$ rolul blocului integrator #cu condiţie iniţnulă$ corespunzător variabilei de stare. etalierea vînsemna o exprimare numai în termenii imaginilor Baplale variabilelor de stare şi de intrare.
7. /rin aplicarea transformării Baplace inversesetul de ecuaţii în descriere operaţională obţinut la pasanterior este adus în domeniul timp, furnizând ecuaţvectorial matriceală de stare de forma #+.>.+$.
>;
&e
, c# s$
R
4 I *# s$
B # s$
, r # s$
4 *s)
uc#?$
s)
4
i *#?$, *# s$
, *# s$
4!#. &.:.1*.Modelul de tip diagramă bloc îndescriere operatională pentru sistemul electric din
'xemplul +.8.<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 60/145
=. 5e scrie câte o ecuaţie în imagini Baplace pentru fiecare variabilă de ieşire, având variabila dizolată în membrul stâng, iar membrul drept explicitând&o #conform diagramei$ în termenii variabstare şi de intrare.
>. /rin aplicarea transformării Baplace inverse, setul de ecuaţii în descriere operaţională obţinut îanterior este adus în domeniul timp, furnizând ecuaţia vectorial matriceală de ieşire, de forma #+.>.7$
E2emplul &.:.:.
5e consideră diagrama bloc din fig. +.8.)=, pentru care se aplică algoritmul de construire amodel intrare&stare&ieşire.
/asul ). legem drept variabile de stare, c# s$ şii *# s$./asul +. /entru , c# s$ scriem ecuaţia(
$#)
$# s I s1
s, *e
c = ,
care este tot una cu($#
)$# s I
s s, *
ec = . #_$
/entru I *# s$ scriem ecuaţia(
( )$#$#$#)
$# s B s I & s, *s
s I *ec * +−−= ,care este tot una cu(
$#)
$#$#)
$# s B *
s I *
& s,
* s sI *
ec * +−−= . #__$
/asul 7. plicăm transformarea Baplace inversă ecuaţiilor #_$, #__$ şi rezultă
$#)
$# t i
t u *e
c = ,
$#)
$#$#)
t e *
t i *
&t u
*dt di
*e
c * +−−= .
a căror reformulare vectorial matriceală de tipul #+.>.+$ este imediată./asul =. 'xplicităm , *# s$ sub forma
$#$#$#$# s B s I & s, s, *ec * +−−= ./asul >. /rin aplicarea transformării Baplace inverse ecuaţiei anterioare se obţine
$#$#$#$# t et i &t ut u *ec * +−−= ,a cărei reformulare vectorial matriceală de tipul #+.>.7$ este imediată.'xaminând structura blocurilor de tip proporţional, integrator şi derivator în scrierea operaţiona
constată faptul că blocurile conţin tocmai func"iile de transfer asociate comportărilor respective. #0menţiune specială necesită cazul integratorului, când afirmaţia de mai sus presupune nulitatea coiniţiale %#?$ H ?.$
atorită proprietăţilor garantate de algebra funcţiilor de transfer #a se vedea, de exemplu, D);;CE$, asupra blocurilor liniare în descriere operaţională pot fi operatetransfigurări , care permitnlocuireaunui grup de blocuri şi a conexiunilor aferente lor printr&un singur bloc cu o funcţie de transfer de tipulfracţie raţională. ^locul rezultat este echivalent intrare&ieşire cu grupul de blocuri considerate iniţefectuarea câtorva etape succesive de transfigurări se poate ajunge la modelul de tip funcţie #matrtransfer a sistemului. /ornind de la diagrama bloc a sistemului, determinarea funcţiei #matricei$ de se poate realiza şi cu ajutorul grafurilor de fluenţă Mason.
<?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 61/145
&.;. Modele 3a"!ante 'n t!mp
"n această secţiune, ne ocupăm, pe scurt, de modelarea funcţionării sistemelor fizice care componente cu caracteristici de material ce se modifică în timp, ca urmare a însăşi funcţionării. /re pentru evitarea oricărei ambiguităţi, că astfel de modificări nu au fost luate în discuţie pe pasecţiunilor anterioare din acest capitol, când numai semnalele #sau variabilele$ au fost privite dreptcu evoluţie dependentă de timp. "n scopul clarificării rapide a contextului fizic referit în secţiunea cvom face apel la un exemplu care să pună în evidenţă deosebirile în raport cu problematica secţanterioare.
E2emplul &.;.1.
Ae plasăm în contextul 'xemplului +.=.). din secţiunea +.= a acestui capitol, cu singura deosebinductanţa bobinei nu mai este constantă, ci variază în timp, potrivit expresiei(
t a * += ,undea L ? notează o constantă. stfel, legea ce descrie funcţionarea bobinei ca acumulator de energie,de forma(
$#t udt
d *
* =Φ ,
unde mărimea($#$#$#$# t it at *it * * +==Φ
desemnează fluxul magnetic. rept urmare, explicitându *#t $ în funcţie de variabilele de stareu #t $,i *#t $, şimărimea de intraree#t $, vom obţine(
$#$#$#$#$# t ut i &t edt dit at i *e * * −−=++ ,sau, echivalent(
$#)
$#)
$#)
t et a
t it a
&t u
t adt di
*e
*
++++−+−= .
stfel, intrăm în posesia unei ecuaţii vectorial&matriceale de stare, variante în timp(
$#)?
$#
$#
))
)?
t et at i
t u
t a
&
t a
1
dt
didt
du
*
1
e
e *
1
++
++−
+−
= ,
în care o parte dincoeficien"i sunt func"ii de timp ./ornind de la acest exemplu, putem generaliza situaţia discutată pentru modele de ordinn N, în
cazul când unul sau mai mulţi parametri ai sistemului fizicvariază n timp . @om avea, astfel, de a face cuoreprezentare intrare-stare-ie#ire variantă n timp de forma(
$#$#$#$#$# t t t t t uB2A2 += , #+.C.)$$#$#$#$#$# t t t t t uD2C += , #+.C.+$
în care semnalele2#t $ R n, #t $ R p îşi păstrează semnificaţia din ecuaţiile #+.>.+$ şi #+
corespunzătoare cazului invariant în timp. *eea ce diferă faţă de modelul #+.>.+$ şi #+.>.7$ este fap puţin o parte din elementele matricelorA#t $, B#t $, C#t $, D#t $ sunt func"ii de variabila independentă, cusemnificaţie temporalăt #spre deosebire de modelul #+.>.+$ şi #+.>.7$ unde toate aceste elemenconstante $.
<)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 62/145
6ără a intra în nici un fel de detalii, atragem atenţia asupra faptului că soluţia2#t $ R n a ecuaţieidiferenţiale de stare, în forma vectorial matriceală #+.C.)$ nu mai posedă aceleaşi procomportamentale ca cele analizate în secţiunea +.>. *ititorului interesat în aprofundarea problespecifice ecuaţiilor diferenţiale de tipul #+.C.)$ îi este recomandată lucrarea #^arbu, );C>$.
iscuţia asupra construcţiei modelelor variante în timp poate fi extinsă şi încazul neliniar , atuncicând unul sau mai mulţi parametri ai sistemului fizic îşi modifică valoarea, respectiv valorile, în timatare model este dat de oreprezentare neliniară intrare-stare-ie#ire( variantă n timp( de forma (
( ) nmnt t t t R R R R f u2f 2 →××= (,$,#$,#$# , #+.C.7$( ) nmnt t t t R R R R #u2# →××= (,$,#$,#$# . #+.C.=$
'ste imediat vizibil faptul că ecuaţiile #+.C.7$ şi #+.C.=$ generalizează descrierile intrare&st#+.<.)$ şi #+.<.+$ #care sunt invariante în timp$, prin prezenţa variabilei temporalet drept argument separat înf #+.C.7$ şiFsau# #7.C.=$. 5emnalele2#t $ R n, u#t $ R m, #t $ R p îşi păstrează semnificaţia din cazumodelului neliniar invariant în timp #+.<.)$ şi #+.<.+$.
0 clasă importantă de sisteme fizice pentru care descrierea funcţionării face apel la modelele vîn timp o constituie sistemele cu funcţionare în regim de comutaţie. acă, pentru fixare, ne referim laliniar #+.C.)$ şi #+.C.+$, atunci elementele matricelorA#t $,B#t $,C#t $ pot fi func"ii de timp constante pe por"iuni
#adică constante pe intervale de timp$, astfel încât modelul variant în timp #+.C.)$ şi #+.C.+$ revine la #după anumite reguli, eventual succedarea ciclică$ a mai multor modele invariante în timp, de forma #+.>.7$. "n atare cazuri se mai spune că avem de a face cu odescriere multi-model . tragem atenţia cădiscontinuităţile ce caracterizează cuplarea dintre modelele ce compun o descriere multi4model discontinuităţile elementelor luiA#t $,B#t $,C#t $$ necesită un aparat matematic mai rafinat, bazat pe concepde soluţie în sens *aratheodorO şi de incluziune diferenţială, a se consulta, de exemplu, lucrarea #^arbu
&.<. No0!un! p"!3!nd %ta+!l!tatea %!%temelo"
/roblematica stabilităţii acoperă o arie vastă de studiu, cu originea în teoria calitativă a ecuadiferenţiale. /e parcursul acestei secţiuni vom prezenta câteva noţiuni de bază privind stabilitatea sisteîn contextul reprezentărilor neliniare intrare&stare&ieşire, invariante în timp, de forma #+.<.)$, #+ particularizări adecvate ale exprimărilor #+.<.)$, #+.<.+$ vom putea da unele interpretări suplimentasituaţia frecvent întâlnită a modelelor liniare invariante în timp. eşi aceste noţiuni nu sunt direct necemodelarea propriu&zisă a funcţionării sistemelor fizice, ele se dovedesc extrem de utile în etapa de umodelelor respective pentru a investiga diverse aspecte ale dinamicii.
/entru o aprofundare a problematicii stabilităţii, recomandăm consultarea lucrărilor monog#@oicu, );C<$ şi #:ăsvan, );C8$. e asemenea, cititorii interesaţi în detalii şi demonstraţii matematiconsulta capitolele destinate teoriei stabilităţii din cursuri moderne de ecuaţii diferenţiale, cum#*orduneanu, );8)$, #UalanaO, );8+$, #^arbu, );C>$, #@rabie, );;;$. cest material bibliografic inclu
cazul descrierilor variante în timp, care nu este discutat în secţiunea de faţă.&.<.1. P"o+lemat!ca %ta+!l!t)0!! !nte"ne&.<.1.1. Def!n!"ea conceptelo" fundamentale5tabilitatea internă a unui sistem descris de ecuaţiile #+.<.)$ #+.<.+$ se abordează numain raport cu
variabilele de stare ce corespund vectorului2#t $, în condiţiileabsen"ei semnalelor de intrare , adică luând?$# ≡t u în #+.<.)$. stfel ecuaţia +.<.) devine(
( ) nnt t R R f 2f 2 →= (Z
,$#Z
$# , #+.;.)$iar evoluţia variabilelor de stare este datorată numaicondi"iei ini"iale nt R 2 $# ? . Buăm în discuţie doarcazul când proprietăţile funcţiei f
Z asigură existenţa şi unicitatea soluţiei pentru problema *auchO.asemenea, vom presupune că soluţia problemei *auchO corespunzătoare oricărei condiţii iniţiale2#t ?$ estedefinită pe întreaga semiaxă Dt ?, ∞$.
/roblematica stabilităţii interne este formulată cu privire la anumite soluţii cu proprietăţi deoale ecuaţiei #+.;.)$. "n prezentarea noastră ne vom opri numai la soluţiile de tip punct de echilibru , dar
<+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 63/145
atragem atenţia că, în general, mai există şi alte tipuri de soluţii #cum ar fi soluţiile periodice$, cobiectul studierii stabilităţii interne.
3n vector nR G se numeşte punct de echilibru al sistemului #+.;.)$, dacă(?$#Z =Gf . #+.;.+$
*u alte cuvinte, punctul de echilibru nR G este o soluţie a sistemului #+.;.)$, care sistem, în urminiţializării în G2 =$# ?t va rămâne chiar în această stare, adică
$,D,$# ? ∞= t t t G2 .'ste evident că dacă ecuaţia algebrică #+.;.+$ posedă mai multe soluţii distinctenR G , atunci
sistemul #+.;.)$ are mai multe puncte de echilibru. acă ?≠G #originea spaţiuluiR n $, prin utilizarea uneischimbări de variabilă de forma(
G22 −= , #+.;.7$sistemul #+.;.)$ devine(
$# 2f 2 = , #+.;.=$unde(
$#Z
$# G2f 2f += . #+.;.>$
e aici rezultă că ?$#Z$?# == Gf f conform #+.;.+$. *onstatăm astfel că ori de câte ori se doreschimbarea de variabilă #+.;.7$ permite transformarea punctului de echilibru?≠G al sistemului iniţial#+.;.)$ în punctul de echilibru ? al sistemului modificat #+.;.=$. ceastă transformare creează posibilita privi punctul ? #originea spaţiuluiR n$ ca un punct de echilibru, ori de câte ori o asemenea tratare prezinteres.
/unctul de echilibru nR G al sistemului #+.;.)$ se numeşte simplu stabil dacă pentru orice ?>ε şiorice ?? ≥t există ?$# >ε δ astfel încât pentru orice condiţie iniţială2#t ?$ satisfăcând $#$# ? ε δ ≤− G2 t avem ≤− G2 $# t pentru ?t t ≥ . Aotaţia desemnează o normă dinR n. stfel spus, stabilitateasimplă a punctului de echilibru nR G înseamnă că orice soluţie a sistemului #+.;.)$ care a fost iniţializla t ? într&o vecinătatea a luiG, va rămâne într&o vecinătate a luiG pentru ?t t ≥ , dimensionarea celor douăvecinătăţi formulându&se printr&o exprimate de tipul şi 6.
/unctul de echilibru nR G al sistemului #+.;.)$ se numeşteasimptotic stabil dacă el este stabil şi, în plus, este îndeplinită condiţia ?$#lim =−
∞→G2 t
t . 'ste aşadar evident că un punct de echilibru simplu stabnu este întotdeauna şi asimptotic stabil, după cum va reieşi din exemplele de mai jos.
/unctul de echilibru nR G al sistemului #+.;.)$ se numeşteinstabil , dacă el nu este nici asimptoticstabil, nici simplu stabil. ltfel spus, instabilitatea punctului de echilibruK se manifestă prin aceea că existăsoluţii ale sistemului #+.;.)$ care deşi sunt iniţializate lat ? suficient de aproape- deG, ele nu pot fi păstrate pentru ?t t ≥ într&o vecinătate a luiGcontrolabilă prin mecanismul şi 6.
E2emplul &.<.1.5ă considerăm condensatorul electric din 'xemplul +.+.)., a cărui funcţionare este descrisă de ec
de stare scalară(
e1 t i
dt du $#= ,
în careu#t $ este variabila de stare, iari#t $ este mărimea de intrare. "ntr&o scriere de forma #+.;.)$ #adabsenţa mărimii de intrare$, avem ?$$##
Z =t uf , ceea ce înseamnă că ecuaţia algebrică #+.;.+$ este satisfăc pentru orice valoare R K . :ezultă că orice tensiune constantăK constituie un punct de echilibru pentrusistem, în sensul că odată ce la momentult ? tensiunea pe condensator esteK#adică θ =$# ?t u $, condensatorul
păstrează la borne tensiunea K #adică θ =$#t u , ?t t ≥ $ 4 neglijând fenomenele de pierdere pentru sarcielectrică.0ricare din aceste puncte de echilibruK sunt puncte de echilibru simplu stabile. "ntr&adevăr,
funcţionarea sistemului fizic constatăm că pentru orice?>ε şi ?? >t există ε ε δ =$# astfel încât alegerea<7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 64/145
arbitrară a tensiunii iniţialeu#t ?$ într&o vecinătate a luiKdefinită prin ε δ θ =≤− $#$#t u , asigură păstrareatensiuniiu#t $ într&o vecinătate a luiK definită prin $#$# ? ε δ θ ≤−t u pentru ?t t ≥ #deoareceu#t $ este chiaru#t ?$$. tragem atenţia că alegerea ε ε δ =$# se datorează specificităţii exemplului considerat, dar, general, $#ε δ trebuie înţeleasă ca o funcţie oarecare de6.
Aici unul din multitudinea de puncte de echilibru simplu stabil nu este punct de echilibru asimstabil. "ntr&adevăr, considerând un punct de echilibruKoarecare, evoluţia tensiuniiu#t $ pe condensator nu vasatisface condiţia ?$#lim =−
∞→θ t u
t , cu excepţia situaţiei cu totul particulare când valoarea tensiunii iniţ
este chiar ?, adicău#t ?$ H ?.
E2emplul &.<.&.
5ă considerăm sistemul mecanic din 'xemplul +.7.)., a cărui funcţionare este descrisă de ecuaţstare scalară(
$#)
$#$# t ' t /
t eγ γ
+−= ,
în care #t $ este variabila de stare şi ' #t $ variabila de intrare. "ntr&o scriere de forma #+.;.)$ #adică în abvariabilei de intrare$ avem( ) $#$#Z t / t f
γ −= , ceea ce însemnă că ecuaţia algebrică #+.;.+$ are sing
soluţie ?=θ . :ezultă că sistemul mecanic considerat are un singur punct de echilibru şi anume origin#adică deplasare nulă a punctului $. 2ipul acestui punct de echilibru reiese imediat din stufuncţionării sistemului mecanic. /entru6 L ? arbitrar şit ? arbitrar, există ε ε δ =$# astfel încât pentru oricedeplasare iniţială #t ?$ dintr&o vecinătate a originii, definită prin ε ε δ =≤ $#$# ?t - este asigurată rămânerea punctului într&o vecinătate a originii, definită prin ε γ ≤= − $#$# ?t et t / e pentru ?t t ≥ . Mai mult, dinexpresia lui $#$# ?t et t / e γ −= , rezultă ?$#lim =
∞→t
t , ceea ce înseamnă că origiunea este punct dechilibru asimptotic stabil pentru sistemul considerat.
E2emplul &.<.,.
5ă considerăm pendulului fizic a cărui funcţionare este discutată şi modelată în secţiunea *apitolului <, în cadrul 'xemplului <.).+. Modelul rezultat #a cărui construcţie nu o comentăm la momefaţă, întrucât face obiectul studiului în exemplul sus amintit$ are forma(
$,#sin$#$#$#
,$#$#
+ t l g t
ml t
t t
ω γ
ω
ω
−−=
=
unde semnificaţia variabilelor de stare $#$,# t t ω şi a coeficienţilor este cea detaliată în secţiunea <.)."n analiza stabilităţii, ne vom ocupa numai de cazul?=γ , când nu există frecări între tijă şiarticulaţie, caz pentru care modelul devine
.$#sin$#$#
,$#$#
t l g t
t t
ω
ω
−=
=
cest model este de forma #+.;.)$, cu vectorul variabilelor de stare
[ ] [ ]8 8 t t t t t $#$#$#$#$# +) ω ==2 .
supra pendulului nu acţionează nici o mărime de intrare, mişcarea pendulului datorându&se condiţiilor iniţiale. /unctele de echilibru sunt date #conform #+.;.+$$ de soluţiile sistemului de
algebrice(,?$#sin$#
,?=−
=t l g
ω
adică în scriere vectorială, sunt(<=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 65/145
[ ] [ ] -G == / / 8 8 ,?π ω .
'vident aceste valori corespund imaginii intuitive create asupra funcţionării, ştiindu&se că pendulul nemişcat dacă şi numai dacă este plasat strict în poziţie verticală şi nu posedă viteză unghiulară. @omstabilitatea acestor puncte de echilibru, oprindu&ne numai la două situaţii, care, datorită periodicităţisinus, le acoperă, în fond, pe toate celelalte. şadar, considerăm situaţiile(
/unctul de echilibru este1
[ ] [ ]8 8 ??== ω G
şi corespunde cazului când masa #m$ este plasată sub articula"ia 0, pe verticala ce trece prin 01/unctul de echilibru este1
[ ] [ ]8 8 ?π ω ==G
şi corespunde cazului când masa #m$ este plasatădeasupra articula"iei 0, pe verticala ce trece prin 01:evenind la aspectul intuitiv, situaţia ) înseamnăun punct de echilibru simplu stabil #nu este
asimptotic stabil datorită neglijării frecărilor$, iar situaţia + înseamnăun punct de echilibru instabil . "n celece urmează vom furniza argumente de factură matematică ce justifică afirmaţiile precedente, privitnatura celor două puncte de echilibru.
Ae vom ocupa, mai întâi, de situaţia ), referitoare la punctul de echilibru[ ] == 8 ω G [ ]8 ??=
. :eprezentarea de stare este echivalentă cu ecuaţia diferenţială de ordinul %%(?$#sin$#$# =+ t l g t ,
care, prin înmulţirea cu $#+ t , conduce la ecuaţia diferenţială(?$#sin$#$#+$#$#+ =+ t t l g t t .
ceasta din urmă poate fi rescrisă sub forma(
( )[ ] ?$#cos$#+$# + =− t l g t dt d ,
de unde, prin integrare pe intervalul D?,t E, se obţine(
( ) ( ) ?$,?#cos$#+$?#$#cos$#+$# ++ ≥−=− t l g t l g t ,
sau, echivalent #ţinând cont că = $(( ) ( ) ?,$?#cos)+$?#$#cos)+$# ++ ≥−+=−+ t g l t g t l ω ω .
6ie ?>ε arbitrar şi să considerăm valoarea $#ε δ care satisface inegalitatea(
+sinJ,minI=$cos)#+ ++ ε
δ δ g l g l ≤−+ .
acă pentru starea iniţială2#?$ avem îndeplinită condiţia([ ]ω ≤=−
∞∞8 $?#$?#$?# G2 ,
atunci este adevărată şi inegalitatea(( ) $cos)#+$?#cos)+$?# ++ δ δ ω −+≤−+ g l g l
şi, cu atât mai mult, inegalitatea(
( )+
sinJ,minI=$?#cos)+$?# ++ ε ω g l g l ≤−+ .
stfel, în baza celor arătate mai sus, putem concluziona că(( ) ?,
+sinJ,minI=$#cos)+$# ++ ≥≤−+ t g l t g t l ε
ω ,
sau echivalent(<>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 66/145
?,+
sinJ,minI=+
$#sin=$# +++ ≥≤+ t g l
t g t l
ε ω .
:ezultă, aşadar, că vom avea satisfăcute inegalităţile(
,?,+
sin=+
sinJ,minI=+
$#sin=
,?,+
sin=+
sinJ,minI=$#
+++
+++
≥≤≤
≥≤≤
t g g l t
g
t l g l t l
ε ε
ε ε ω
care, de fapt, înseamnă(?,
+sin=$# ++ ≥≤ t t ε
ω ,
?,+
sin+
$#sin ++ ≥≤ t
t ε ,
ceea ce implică(?1$# ≥≤ t t ε ω ,?1$# ≥≤ t t ε .
ltfel spus, am arătat că inegalitatea[ ] ?$#$#$?# ≥≤=−
∞∞ t t t 8 ε ω G2 ,
este asigurată pentru ?>ε arbitrar, odată ce este îndeplinită condiţia $#$?# ε δ ≤− ∞G2 , cu $#ε δ ales camai sus. *oncludem că punctul de echilibru [ ]8 ??=G este simplu stabil , deoarece condiţia de stabilitateasimptotică(
?$#lim =− ∞∞→G2 t
t
ar însemna #în baza celor de mai sus$ că pentru valori arbitrare $?#$,?# ω să avem(
,?+
$?#sin=$?# ++ ≡+ ω g l
ceea ce, în mod evident, este imposibil.2recem acum la situaţia +, referitoare la punctul de echilibru[ ] [ ]8 8 ?π ω ==G . 3tilizând un
nou vector de stare(
−=−==?$#
$#$#
$#
$#$#
π
ω
ω
t t
t t t
t G22
construit conform #+.;.7$, rezultă o descriere de stare de tipul #+.;.=$1
,$#sin$#$#,$#$#
t l g t t t
ω ω
==
pentru care vom investiga stabilitatea punctului de echilibru[ ]8 ?? #adică originea spaţiuluiR +$./rocedând analog situaţiei ), vom putea scrie1
( ) ( ) ?$,?#cos$#+$?#$#cos$#+$# ++ ≥+=+ t l g t l g t ,
sau, echivalent #ţinând cont că ω = $(
( ) ( ) ?$,?#cos$#+$?#$#cos$#+$# ++ ≥+=+ t l g t l g t ω ω .
6ie l g M ,)max=
. dacă pentru ?>δ oarecare, considerăm stări iniţiale de forma(
,+
$)sin#+$?#
,$M)#$?#
δ ω
δ
M l g =
=
<<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 67/145
atunci constatăm că([ ]ω ≤=
∞∞8 $?#$?#$?#2 ,
şi în plus($#+$?#cos$#+$?#+ l g l g =+ ω .
3ltima inegalitate ne arată că pentru stări iniţiale definite ca mai sus avem(
( ) ?$,#+$#cos$#+$# ++ ≥=+ t l g t l g t ω ,sau, echivalent(
( ) ?,?+
$#sin$#=$# +++ ≥=+ t
t l g t
ω .
eci, pentru orice soluţie a sistemului iniţializată în $?#$,?# ω definite anterior, variabilele de stare$#$,# t t ω vor satisface egalitatea(
?,+
$#sin+$# ≥= t
t l g t
ω ,
care poate fi privită drept o ecuaţie diferenţială neliniară, de ordinul %(+
$#sin+$#
t l g t
= ,
având ataşată condiţia iniţială( )δ M )$?# = .
%ntegrând această ecuaţie diferenţială #pentru care variabilele sunt separabile$, vom obţine pent$#t expresia(
( ) ( )l g
M 1 ecl g t t
=)
tg,arctg=$# δ == .
Buând l g π ε = , constatăm că pentru stările iniţiale definite mai sus, avem ε >$#t , de îndatăce este satisfăcută condiţia(( )
=>
l g
M t t
=
)ctgln)
δ .
*u aceasta, am arătat că există stări iniţiale cu δ ≤∞$?#2 #δ arbitrar & în sensul oricât de mic pentru care g l t π ε =>
∞$#2 de îndată ce )t t > , ceea ce înseamnă că originea este punct de echilibinstabil. :evenind la variabilele de stare $#$,# t t ω din descrierea de la început, putem afirma c
[ ]8 ?π =G este punct de echilibru instabil .
in cele ce discutate anterior a reieşit că stabilitatea asimptotică este o proprietate care poaasociată unei solu"ii particulare de tip punct de echilibruG a sistemului #+.;.)$, vizând comportaretuturor soluţiilor iniţializate în vecinătatea luiG. "n cazul cândG este un punct de echilibru asimptoticstabil al sistemului #+.;.)$ şi, în plus, condiţia G2 −
∞→$#lim t
t are loc pentru orice stare $# ?t 2 în care esteiniţializată dinamica, se spune că punctul de echilibruGeste global asimptotic stabil . *u alte cuvinte, însituaţia de globalitate a proprietăţii de stabilitate asimptotică, condiţia iniţială2#t ?$ poate fi situatăoric$tde departe #în sensul metricei dată de o normă dinR n$ faţă deG, care este singurul punct de echilibru alsistemului #+.;.)$. atorită acesteiunicită"i a punctului de echilibru, atributul de global asimptotic
stabil -, poate fiasociat nsu#i sistemului #+.;.)$, care, astfel, va fi referit drept sistem global asimptostabil-, sau, mai pe scurt, sistem asimptotic stabil- #caracterul de globalitate fiind subînţeles$.
E2emplul &.<.*.
:eluând 'xemplul +.;.+, constatăm că originea 0 este punct de echilibru global asimptotic sta pentru sistemul mecanic considerat, deoarece, indiferent de valoarea iniţială a deplasării #t ?$, avem
<8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 68/145
îndeplinită condiţia ?$#lim =∞→
t -t . in punct de vedere al experimentului practic, trebuie precizat că valo
lui #t ?$ nu pot fi oricât de mari #fiindcă sistemul s&ar distruge$, dar, în aplicarea la nivel strict tedefiniţiei stabilităţii asimptotice ne putem permite valori oricât de mari pentru condiţia iniţială a ediferenţiale considerată drept model pentru funcţionarea sistemului. "n concluzie, putem afirma sistemul mecanic avut în vedere că este global asimptotic stabil, sau, mai pe scurt, asimptotic stabil.
&.<.1.&. C"!te"!! ut!l!(ate 'n ca(ul "ep"e(ent)"!lo" de %ta"e l!n!a"e"n cazul modelelor invariante în timp de tipreprezentări liniare intrare-stare-ie#ire de forma #+.>.7$
şi #+.>.=$, studiul stabilităţii interne poate face apel la instrumentele algebrei liniare, după cum va rdiscuţia următoare. stfel, în absenţa mărimilor de intrare #adică ?$# ≡t u $ ecuaţia de stare #+.>.7$ se redula(
,$,#$# nnt t ×= R AA22 #+.;.<$ce reprezintă particularizarea lui #+.;.)$ pentru cazul modelelor liniare.
/unctele de echilibru ale sistemului diferenţial #+.;.<$ sunt date #în conformitate cu #+.;.+$$ d#soluţiile$ sistemului algebric(
?=AG . #+.;.8$:ezultă că ?=G #originea spaţiuluiR n$ este singurul punct de echilibru al sistemului diferenţial
#+.;.<$ dacă şi numai dacă n=Arang , sau, echivalent, dacă şi numai dacă matriceaA nu posedă valori proprii nule.
*um pentru orice condiţie iniţială nt R 2 $# ? , soluţia sistemului diferenţial #+.;.<$ este(
$#$# ?$# ? t et t t 22 A −= , #+.;.C$
utilizarea exprimării de forma #+.=.++$ pentru exponenţiala matriceală$# ?t t e −A ne arată că îndeplinireacondiţiei ??$#lim =−
∞→t
t are loc dacă şi numai dacă toate autovalorile matriceiA au partea reală strictnegativă #fapt exprimat analitic prin inegalităţile #+.=.);$$. "n această, situaţie,?=G este punct de echilibru
global asimptotic stabil şi, în baza celor discutate anterior, putem afirma că sistemul diferenţial #+.;.<$asimptotic stabil.
jungând în acest punct al studiului dedicat stabilităţii interne, cititorul deţine toate informnecesare pentru a înţelege pe deplin sensul restricţiei #+.=.);$ pe care am introdus&o în secţiunea +am investigat dinamica sistemelor descriptibile prin modele liniare intrare&stare&ieşire, detaliincomportarea specifică sistemelor asimptotic stabile . e asemenea, cititorul va observa că particularizarerestricţiei #+.=.);$ în cazul scalar al lui #+.;.<$, adică R = at at $,#$# , va însemna condiţiaa ` ?. eaceastă condiţie s&a făcut uz în secţiunea +.7, definind modelul de tip ecuaţie diferenţială lincoeficienţi constanţi prin exprimarea #+.7.)$, în care restricţiaa )
L ?, a ? L ? asigură ( ) ?)? <−= aaa ,
deoarece ?$# ≡t u permite a rescrie #+.7.)$ drept ( ) $#$# )? t aat −= .
E2emplul &.<.5.
*onsiderăm circuitul electric discutat anterior în 'xemplul +.=.). "n absenţa semnalului de indescrierea de stare de forma #+.;.<$ este(
−−=
$#
$#
)
)?
t i
t u
*
&
*
1
dt
didt
du
*
1
e
e *
1
şi singurul punct de echilibru este originea spaţiuluiR +, [ ]8 ??=G #fiind unica soluţie a sistemului decuaţii algebrice de forma #+.;.8$$. *onform studiului din 'xemplul +.=.+, valorile proprii au partestrict negativă #indiferent de parametrii * , e, &e$, ceea ce arată că sistemul considerat este global asimptotic
<C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 69/145
stabil . 5emnificaţia fizică a acestei constatări este aceea că indiferent de starea iniţială #tensiucondensator şi curent prin bobină$, dacă sursa furnizează putere nulă dar permite circulaţia curentuluvectorul variabilelor de stare va prezenta proprietatea(
[ ] ?$#$#lim =∞→
8 *c
t t it u ,
manifestare cunoscută prin analiza dinamicii de regim liber din paragraful +.=.7.
rept exerciţiu, cititorul este invitat să probeze stabilitatea asimptotică a sistemului prin aplidefiniţiei bazată pe construcţia de tip şi 6."n cazul când matriceaA din descrierea de stare #+.;.<$ nu are toate valorile proprii cu partea
strict negativă #adică nu sunt satisfăcute toate inegalităţile #+.=.);$$, sistemul nu poate fi global asstabil. 'xplorând dinamica de regim liber pe baza relaţiilor #+.;.C$ şi #+.=.++$, putem distinge urmsituaţii(). acă matricea A posedă un număr devalori proprii simple cu partea reală nulă #adică situate pe axa
imaginară a planului complex$, iar restul valorilor proprii, simple sau multiple, au partea realnegativă, atunci ne putem plasa în unul din subcazurile de mai jos(
).a$ acă ? #zero$ nu este valoare proprie #adică valorile proprii simple cu partea reală nul pur imaginare$, atunci sistemul areun singur punct de echilibru simplu stabil care este origineaspaţiuluiR +
).b$ acă ? #zero$ este valoare proprie, atunci sistemul areo infinitate de puncte de echilibru simplu stabile .
Dacă matricea A posedă valori proprii multiple cu partea reală nulă şi/sau valoriproprii, simple sau multiple cu partea reală strict po itivă, atunci punctul (respectivpunctele) de ec!ilibru " după cum (#.$.%) are una, respectiv mai multe soluţii & este(respectiv sunt) instabil (respectiv instabile).
*ititorul va putea proba prin demonstraţie riguroasă aceste afirmaţii, făcând apel la expri#+.=.++$ pentru exponenţiala matriceală.
"n cele ce urmează, considerăm utile două exemple cu suport fizic relevant.
E2emplul &.<.9.
*onsiderăm o variantă a circuitului electric din 'xemplul +.=.), în care nu există elementul drezistor. :eprezentarea de stare construită în 'xemplul +.=.) poate fi utilizată în continuare, atribrezistenţei valoarea ?, adică &e
H ?. *u aceasta, dinamica de regim liber #în absenţa semnalului de intreste descrisă de un sistem de ecuaţii diferenţiale omogene de forma #+.;.<$(
−
=$#
$#
?)
)?
t i
t u
*
1
dt
didt
du
*
1 e *
1
.
*onstatăm că matriceaA R +× + are valorile proprii pur imaginare $#)+,) e *1 @±=λ , ceea ce înseamnă căne plasăm în cazul )a$ discutat anterior. *oncluzionăm că originea[ ]8 ?? este singurul punct de echilibru alsistemului, fiind de tipul simplu stabil. 5emnificaţia fizică a acestei afirmaţii constă în aceea că indifestarea iniţialău #?$,i *#?$, dacă sursa furnizează putere nulă dar permite circulaţia curentului, atunci mău #t $,i *#t $ vor rămâne într&o vecinătate a punctului de echilibru[ ]8 ?? , fără a prezenta însă comportarea detip asimptotic
[ ] ?$#$#lim =∞→
8 *1
t t it u .
imensiunea vecinătăţii în care rămânu #t $, i *#t $ este corelată cu depărtarea stării iniţialeu #?$,i *#?$ #însensul metricei formulate cu o normă dinR +$1 mecanismul acestei corelări este de tipul şi 6, putând fi uşorformulat analitic, ca o aplicaţie directă a celor discutate la începutul paragrafului curent. /ractic, în cir
<;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 70/145
trebui să existe oscilaţii neamortizate reproducând periodic valorile iniţialeu #?$, i *#?$, întrucât lipsarezistorului face ca energia să se conserve în totalitate #ipoteză care, în realitate, nu este însă csatisfăcută, datorită rezistenţelor parazite inerente$.
E2emplul &.<.:.
5ă reluăm 'xemplul +.;.) care face referire la condensatorul electric din 'xemplul +.+.). inamide regim liber este descrisă de ecuaţia diferenţială omogenă(
?$# =t u ,care constituie un caz particular al reprezentării de stare #+.;.<$, obţinut pentruA H ? R )× ). /utem spune căA are o singură valoare proprie care este ? şi astfel ne plasăm în situaţia )b$ discutată mai sus. *onchidsistemul admite o infinitate de puncte de echilibru de tip simplu stabil, concluzie la care s&a aju'xemplul +.;.) prin aplicarea definiţiei cu şi 6.
&.<.&. P"o+lemat!ca %ta+!l!t)0!! e2te"ne&.<.&.1. Conceptul de %ta+!l!tate e2te"n)Gtabilitatea e ternă a unui sistem descris de ecuaţiile #+.<.)$ şi #+.<.+$ se abordează în raptransferul intrare-ie#ire $#$# t t u → , în condiţiile când toate variabilele de stare sunt nule la momen
iniţialt ?, adică ?$# ? =t 2 . :eformulând în terminologia specifică introdusă pe parcursul acestui capitol, vspune că studierea stabilităţii externe necesită investigareadinamicii de regim for"at. 5pre deosebire destabilitatea internă, care este o noţiune asociată punctelor de echilibru #în sensul discutat în par+.;.)$, stabilitatea externă este un conceptasociat sistemelor .
5istemul descris de ecuaţiile #+.<.)$ şi #+.<.+$ este stabil e tern dacă pentru orice constantă * L ? şiorice ?? ≥t există o constantă M # * $ L ? astfel încât pentru orice vector al mărimilor de intrare ut $satisfăcând condiţia de mărginire ?$# t t *t u ≥≤ , vectorul mărimilor de ieşire satisface condiţia dmărginire ?$#$# t t * M t % ≥≤ . Aotaţia desemnează o normă finit dimensională, cum ar fi,
exemplu, norma∞. ltfel spus, stabilitatea externă a sistemului înseamnă că pentru orice mărimi ca#de intrare$ mărginite, mărimile efect #de ieşire$ sunt mărginite. in acest motiv stabilitatea extereste referită şi drept stabilitate intrare mărginită – ie#ire mărginită .
"n cazul când nu este îndeplinită definiţia stabilităţii externe prezentate mai sus, vom spusistemul esteinstabil e tern , sau instabil intrare mărginită – ie#ire mărginită . "ntr&o atare situaţie, voexista mărimi de intrare mărginite u#t $ pentru care cel puţin una dintre mărimile de ieşire #adică cel pucomponentă a vectorului O#t $$ va fi nemărginită.
E2emplul &.<.<.
5ă considerăm sistemul mecanic din 'xemplul +.7.), pentru care dependenţa de timp a depla punctului faţă de originea 0 are expresia
∫ ≥=−−t
t
t /
t t d ' et e
??
$#,$#
)$# τ τ
γ
τ γ ,
atunci când deplasarea iniţială este nulă, adică ?$# ? =t . /entru a aplica definiţia stabilităţii în sensuintrare mărginită 4 ieşire mărginită, considerăm o constantă arbitrară * L ? care mărgineşte modulul forţei
' #t $ ce acţionează asupra sistemului, adică, indiferent de evoluţia în timp a acestei forţe, avem saticondiţia ?,$# t t *t ' ≥≤ . 5ă arătăm că în această situaţie de mărginire a mărimii de intrare, măride ieşire satisface condiţia de mărginire(
?,$#$# t t / *
* M t e ≥=≤ ."ntr&adevăr, utilizând proprietăţile integralei, putem scrie(
8?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 71/145
?
$#$#$#,)
)$#
)$#
?
??t t
/ *
e/ *
*d ed ' et -e
t t /
e
t
t
t /e
t
t
t / ee
≥≤
−≤≤≤
−−−−−
∫ ∫ γ τ
γ τ
γ τ γ
τ τ γ .
:ezultă, aşadar, că sistemul mecanic considerat este stabil extern, constatare ce confirmă infizică conform căreia deplasarea punctului va fi întotdeauna mărginită, atâta vreme cât forţa ' #t $ ceacţionează asupra sistemului este mărginită ca amplitudine.
E2emplul &.<.1=.
5ă considerăm un condensator electric conectat la o sursă ideală de curent, conform fig. +.+'xemplul +.+.+. acă la momentul iniţialt ?, tensiunea pe condensator este nulă, atunci la orice momenttimp ulterior ?t t ≥ , tensiunea pe condensator va fi dată de(
?,$#)
$#?
t t d i1
t t
t e≥= ∫ τ τ .
5ă presupunem că sursa ideală de curent furnizează mărimea de intrare de tip treaptă(
≥<=?
?
,),?$#
t t t t t i ,
care, în mod evident, este o mărime mărginită, satisfăcând ?,)$# t t t i ≥≤ . Mărimea de ieşire ce rezultă pentru acest semnal de intrare va fi(
≥−
<=
??
?
$ ,$ #)#
,?$#
t t t t 1
t t t u
e,
care nu este mărginită. "ntr&adevăr, oricare ar fi M L ? #în sensul oricât de mare$, există un moment de tifinit ??) $# t M t M t e ≥+= , astfel încâtu#t $ L M pentrut L t )# M $. *onchidem că sistemul fizic considerat estinstabil e tern , deşi pentru unele clase de semnale de intrare mărginite, ieşirea sistemului este mărginităar fi, de exemplu, cazul semnalelor de intrarei#t $ de forma sinusoidală, pe care cititorul îl poate investdrept exerciţiu$.
in punct de vedere fizic, facem observaţia că sub raport strict experimental, producerea semnade intrare treaptă constituie o idealizare, datorită duratei de timp infinite pe care trebuie furnizat, daraceastă idealizare este capabilă să pună în evidenţă funcţionarea de tip intrare mărginită, ieşire nem#adică instabilitatea %M'M a sistemului$. ltfel spus, dacă am lua în considerare un semnal de intraceeaşi factură, dar finit ca durată, de forma(
>≤≤
<=
,,?
,,)
,,?
$#
)
)?
?
t t
t t t
t t
t i
ieşirea rezultată(
8)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 72/145
>−≤≤−
<=
,$ ,$ #)#
,$ ,$ #)#
,,?
$#
)?)
)??
?
t t t t 1
t t t t t 1
t t
t u
e
e
nu ar mai fi nemărginită, adică nu am putea pune în evidenţă instabilitatea externă.&.<.&.&. C"!te"!u de %ta+!l!tate e2te"n) 'n ca(ul "ep"e(ent)"!lo" l!n!a"eupă cum s&a văzut în secţiunea +.>. a acestui capitol, oricărei reprezentări de stare liniare de
#+.>.+$ şi #+.>.7$ i se poate ataşa o descriere de tip operaţional de forma #+.>.8$, bazată pematricea detransfer # s$ cu exprimarea #+.>.C$. 'galitatea #+.>.8$ furnizează o legătură directă între imagintransformată Baplace a vectorului mărimilor de ieşire şi, respectiv, a vectorului mărimilor de intrcaracterizează complet dinamica de regim forţat. 'ste, aşadar, de aşteptat ca informaţiile privind stabiexternă să poată fi explorate prin intermediul proprietăţilor matricei de transfer# s$. 3n criteriu care permite o atare investigaţie şi cunoaşte o largă aplicabilitate practică testează modul de amplasare amatricei # s$ în planul complex şi are următoarea formulare(
3n sistem descris prin reprezentarea de stare liniară #+.>.+$ şi #+.>.7$ este stabil extern dacă dacă toţi polii matricei de transfer# s$ au partea reală strict negativă #adică sunt plasaţi în semiplacomplex :e s ` ?$.
emonstraţia poate fi uşor schiţată în cazul particular al sistemelor monovariabile #cu o sinintrareu#t $ şi o singură ieşire %#t $$. 5emnaleleu#t $ şi %#t $ sunt mărginite, dacă şi numai dacă imaginile l prin transformarea Baplace, # s$ şi respectiv+ # s$ posedă un număr de poli simpli cu partea reală nulă #adicăsituaţi pe axa imaginară :e s H ?$, iar toţi ceilalţi poli #simpli sau multipli$ au partea reală strict neg#adică sunt situaţi în semiplanul complex :e s ` ?$. Matricea de transfer, în acest caz particular, este de fapfuncţie scalară de variabilă complexă s, care asigură legătura+ # s$ H # s$ , # s$. 5e observă imediat căsatisfacerea mărginirii pentru semnalul %#t $ este #în baza celor discutate anterior$ echivalentă cu a cer
funcţia produs # s$
, # s$ să posede un număr de poli simpli pe axa imaginară :e s
H
? şi toţi ceilalţi poli ai săisă fie situaţi în semiplanul complex :e s ` ?. şadar, singura contribuţie la structura polilor care este admi pentru funcţia # s$, este cu toţi polii situaţi în semiplanul :e s ` ?. /e acelaşi principiu se poate construidemonstraţia şi în cazul general, multivariabil, cititorul interesat putând consulta în acest sens lu#@oicu, );C<$.
in construcţia matricei de transfer# s$ conform #+.>.C$, reiese că polii lui# s$ sunt, totodată,autovalori ale matricei A din reprezentarea de stare #+.>.+$ şi #+.>.7$, într
( ) $#adj$det#)$# ) AIAIAI −−=− − s s s . tragem atenţia că afirmaţia inversă nu este, în generaadevărată, adică nu orice valoare proprie a luiA este, în mod obligatoriu, pol al lui# s$. 'xistenţa unorvalori proprii ale luiA care nu sunt poli ai lui # s$ se datorează faptului că, în construcţia lui# s$conform #+.>.C$, pot apărea simplificări ale unor factori #ce iniţial apar la numitor din dezvol
$det# AI − s , dar, totodată, sunt prezenţi şi la numărătorii fracţiilor ce definesc elementele matricei# s$$./roblematica de acest tip este legată de proprietăţile structurale denumite controlabilitateobservabilitate- #%onescu, );C>$ ale reprezentărilor liniare de stare şi detalierea ei ar depăşi cadruam propus pentru lucrarea de faţă$.
stfel, limitându&ne doar la constatările anterioare, de ordin general, care justifică relaincluziune a mulţimii polilor lui# s$ în mulţimea valorilor proprii a matriceiA, putem formula următoareacondi"ie suficientă de stabilitate externă, bazată pe caracterul global al stabilităţii interne.
acă un sistem descris prin reprezentarea de stare liniară #+.>.+$ şi #+.>.7$ este global asimptotic stabil intern , atunci acel sistem este stabil e tern . #:eciproca nu este, în general, adevărată$. emonstraţiacestei afirmaţii este imediată, ţinând cont de cele discutate în paragraful anterior privind globa
stabilităţii asimptotice care înseamnă că toate valorile proprii ale matriceiA sunt plasate în semiplanulcomplex :e s ` ?, asigurând aceeaşi manieră de plasare şi pentru polii lui# s$ indiferent de simplificărilece pot apărea în structura lui# s$$.
8+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 73/145
E2emplul &.<.11.
5ă considerăm circuitul electric din 'xemplul +.=.)., pentru care mărimea de ieşire este tensiun bobină, conform cazului #iv$ discutat în acel exemplu. "n baza 'xemplului +.=.>, descrierea operaţional a transferului intrare&ieşire se realizează prin intermediul funcţiei de transfer(
$)#$#$#
+
+
ee * s * & s s
s.++
=
care are doi poli, ambii cu partea reală strict negativă. :ezultă, astfel, că sistemul posedă o compostabilă în sensul intrare mărginită 4 ieşire mărginită #ceea ce este în deplină concordanţă cu intuiţireferitoare la funcţionarea circuitului$.
Ba aceeaşi concluzie se poate ajunge utilizând discuţia referitoare la stabilitatea internă din ex+.;.> în care am arătat că sistemul este global asimptotic stabil. rept urmare, sistemul va fi şi stabil ex
E2emplul &.<.1&.
5ă reluăm 'xemplul +.;.)? care face referire la un condensator electric conectat la o sursă idealcurent, conform 'xemplului +.+.+. escrierea operaţională a transferului intrare 4 ieşire în regim forrealizează prin funcţia de transfer $#)$# s1 s. e= , al cărui unic pol s H ? nu are partea reală strict negativă:ezultă că sistemul nu este stabil extern, concluzie la care s&a ajuns şi în 'xemplul +.;.)?. Mai mult,vom considera un semnal de intrarei#t $ treaptă de durată infinită #ca în prima parte a 'xemplului +.;.)acest semnal va avea transformata Baplace
st i
)$# =L , iar produsul $#$#$# t ut i s. LL = #care defineşte
imaginea semnalului de ieşireu#t $$ va avea un pol dublu în s H ?, arătând cău#t $ nu este un semnal mărginite asmenea, amintim că în contextul analizei stabilităţii interne din 'xemplul +.;.8 s&a arătat că sist
posedă o infinitate de puncte de echilibru simplu stabile, ceea ce înseamnă că nu are sens utilizarea csuficiente de stabilitate externă, bazată pe caracterul global al stabilităţii interne.
E2emplul &.<.1,.*onsiderăm o variantă a circuitului electric din 'xemplul +.=.), în care nu există elementul d
rezistor, iar matricea de ieşire este tensiunea pe bobină, conform cazului #iv$ discutat în acel exescrierea de tip funcţie de transfer construită în 'xemplul +.=.> îşi păstrează valabilitatea şi în acvariantă de circuit, atribuind rezistenţei valoarea &e
H ?, ceea ce va conduce la(
$#)$#
+
+
e *1 s
s s.
+= .
*ei doi poli e *1 j± ai funcţiei de transfer nu au partea reală strict negativă, deci sistemul este insextern. Mai mult, alegând drept semnal de intrare o tensiune sinusoidală de pulsaţie exacte *1 ) #care,evident, este mărginită$, tensiunea pe bobină va fi un semnal nemărginit, deoarece imaginea Basemnalului de ieşire va avea poli dubli în e *1 j± . :ecomandăm cititorului studiul detaliat al comportărcircuitului pentru acest caz care demonstrează că există semnale de intrare mărginite pentru care semde ieşire sunt nemărginite. *azul acesta particular de comportare corespunde fenomenului cunoscdenumirea de rezonanţă pură-, când excitarea provenită de la semnalul de intrare sinusoidal coincifrecvenţă, cu disponibilitatea- de a oscila a sistemului însuşi. 'vident, fenomenul discutat include o doidealizare prin aceea că pierderile de energie sunt considerate nule în absenţa rezistorului #adică &e
H ?$, ceeace nu se poate întâmpla în desfăşurarea unui experiment real.
"n final mai precizăm că nu are sens utilizarea condiţiei suficiente de stabilitate externă, bazcaracterul global al stabilităţii interne, deoarece, în 'xemplul +.;.< s&a arătat că originea spaţiuluiR + estesingurul punct de echilibru al sistemului, având tipul simplu stabil #şi nu asimptotic stabil ca în cazul cân
&e ≠ ?$.
87

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 74/145
&.<.,. C"!te"!ul Hu" !t( p"!3!nd po(!0!a ")d)c!n!lo" unu! pol!nom 'n planul comple2in paragrafele anterioare ale acestei secţiuni a reieşit faptul că, în cazul modelelor lin
analiza atât a stabilităţii interne cât şi a stabilităţii externe face apel la studierea modului în carsituate în planul complex rădăcinile polinoamelor cu coeficienţi reali. at fiind un polinom oarecacoeficienţi reali, un atare studiu nu presupune determinarea efectivă a rădăcinilor acestuia, ci posibilitatea de a preciza poziţia dacă rădăcinile au partea reală negativă, ori, altminteri spus
rădăcinile sunt situate în semiplanul complex negativ #sau semiplanul complex stâng$. 0 asinvestigaţie de factură algebrică poate fi întreprinsă cu ajutorul următorului criteriu, cunoscut denumirea decriteriul Hur0itz (
/olinomul monic #cu coeficientul dominant egal cu )$
niaa sa sa
sa sa s s C
innn
nnn
,,),,
$#
)+
+
++
))
=++++++=
−−
−−
R (#.$.'0)
are toate rădăcinile situate în semiplanul complex :e s ` ?, dacă şi numai dacă toţi minorii principaselectaţi din matricea pătrată nn×R H definită mai jos sunt strict pozitivi, unde(
=
−−−−
−
nnn
nn
nn
aaaaaaa
aaaaaaaaaaaaaaaaaaa
+=
)7
+
>7)
<=+
8>7)
C<=+
;8>7)
?????
??????
??????
?????
???)?
????
???)
???
H , #+.;.))$
iar minorii principali au forma(
,
?
),)
,
7)
=+
>7)
7+
7)+))
aaaaaaa
H aaa
H a H ===
$.det#,,
)?
?
)
=+
>7)
<=+
8>7)
= H== n H
aa
aaa
aaa
aaaa
H (#.$.'#)
*ititorul interesat în demonstraţia acestui rezultat poate consulta #@oicu, );C<$."n aplicaţii practice, construcţia matricei nn×R H definită prin #+.;.))$ se recomandă a fi realizat
astfel. Mai întâi, se plasează pe diagonala principală cei n coeficienţi ai polinomului C # s$, în ordineadescrescătoare a puterilor, naa ,,) . 3lterior, fiecare coloană se completează,n @os, cu coeficienţii lui C # s$corespunzători puterilor mai mari, iarn sus , cu coeficienţii lui C # s$ corespunzători puterilor mai mici #prraportare la elementul deja existent, ca aparţinând diagonalei principale$. /e fiecare coloană, după epcoeficienţilor lui C # s$ se vor scrie zerouri în toate poziţiile rămase necompletate.
E2emplul &.<.1*.
5e consideră sistemul mecanic din fig. >.=.);, pentru care, în 'xemplul >.=.7 din *apitolul >,construită următoarea ecuaţie vectorial&matriceală de stare de forma #+.=.7$(
8=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 75/145
$#
?
?
?
)
???
)?)?
?
??)? +
C
8
>
+
))
+
C
8
>
+
)
+++ t '
m
'
v
'
v
/
mm
/ / /
m
'
v
'
v
e
eee
−
+−−−
−
=γ
.
*onsiderând sistemul izolat faţă de mărimea de intrare #adică ' #t $H? în ecuaţia de mai sus$, studiere
stabilităţii interne revine la a analiza poziţionarea autovalorilor, care sunt date de rădăcinile polinocaracteristic(
?+)+))
+7= +)+)++)+ =++
++++
mm
/ /
m
/ / s
m
/
m
/
m
/ s
/ s s
eeeeeeee
γ γ .
*alculul efectiv al acestor rădăcini nu este posibil în forma parametrizată pe care o au coefic polinomului caracteristic, dar, prin aplicarea criteriului Uur!itz se poate verifica faptul că ele sunt sitsemiplanul complex negativ #C 4 $. "n acest scop, se construieşte matriceaH R =× = conform #+.;.))$(
++
++=
+)+))
)
+)+))
)
+)++)
+)+
+)++)
+)+
)?
??
?)
??
m
/
m
/
m
/
m
/
m
/
/
m
/ / m
/
m
/
m
/
m
/
m
/
/
m
/ /
eeeee
eee
eeeee
eee
γ γ
γ γ
H .
/rimul minor principal este(?
+ >γ e/ .
l doilea minor principal este(
?) +)
+))
) +++
++)
+)+
>
+=
++ m
/
m
/ /
m
/
m
/
m
/
/
m
/ /
eee
eee
eee
γ
γ γ .
l treilea minor principal este(
?
?
)
?
))
+
)
))+))
)
+)+
+)+
+)++)
+)+
>
=++m
/
m
/ /
/
m
/ / m
/
m
/
m
/
m
/
m
/
/
m
/ /
eee
eee
eeeee
eee
γ
γ γ
γ γ
.
l patrulea minor principal este(
8>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 76/145
?
)?
??
?)
??
+
+
+
)
+
+)+))
)
+)+))
)
+)+
+)++)
+)+
+)++)
+)+
>
=
++
++
m
/
m
/ /
m
/
m
/
m
/
m
/
m
/
/
m
/ / m
/
m
/
m
/
m
/
m
/
/
m
/ /
eee
eeeee
eee
eeeee
eee
γ γ γ
γ γ
.
m probat astfel că toţi cei = minori principali ce pot fi selectaţi din matricea ==×R H construitămai sunt sunt strict pozitivi, ceea ce este echivalent cu situarea tuturor valorilor proprii ale sistestudiat în semiplanul complex :e s ` ?. *oncluzionăm că originea spaţiului=R este punct de echilibruglobal asimptotic stabil pentru sistemul luat în discuţie.
*. ANALO II ÎNTRE DIJER$E DOMENII ALE 4I-ICII"n urma parcurgerii capitolului anterior, se poate constata existenţa unor similitudini în descriecu
parametrii concentra"i a comportării elementelor cu acţiuni tipice în procesarea energiei, indiferent de nacesteia. 0 afirmaţie de aceeaşi natură poate face referire la relaţiile matematice aferente modurilor de coa elementelor. 0rganizarea capitolului curent a fost proiectată de aşa manieră încât să permită evidetuturor acestor analogii, printr&o prezentare sistematică, sub formă tabelară, a fiecărui element sauconectare în parte incorporând toate domeniile energetice luate în discuţie în *apitolul 7. rept urmmanifestărilor acestor similitudini la nivel fundamental, vor apărea analogii între modelele asociate sisde natură fizică diferită a căror structură este formată din elemente şi moduri de conectare ce se corespdescriere matematică. /rezenţa analogiilor poate fi pusă în evidenţă pentru numeroase exemple de sfizice, parte dintre ele având o construcţie deosebit de simplă.
/entru a asigura o înţelegere cât mai profundă a problematicii analogiilor comportamentale, în acest
se face apel la o abordare graduală organizată pe secţiuni, după cum urmează(=.). 5tudiul comparativ al mărimilor #variabilelor$ specifice diferitelor domenii ale fizicii.=.+. 5tudiul comparativ al elementelor cu acţiuni tipice în procesarea energiei.=.7. 5tudiul comparativ al modalităţilor tipice de conectare #joncţiuni$.=.=. /rezentare sintetică a exprimărilor cauzale ale legilor fizicii.=.>. 'xemple de sisteme fizice ilustrând analogii comportamentale.
*.1. $tud!ul compa"at!3 al m)"!m!lo" 63a"!a+!lelo"7 %pec!f!ce d!fe"!telo" dale f!(!c!!
şa după cum rezultă şi din capitolul anterior, fiecare domeniu al fizicii utilizează mărimi #varispecifice cu ajutorul cărora se pot descrie fenomenele fizice care îi sunt caracteristice. 5e observă că patru mărimi fundamentale care stau la baza descrierii tuturor fenomenelor fizice din fiecare doceste mărimi suntvariabilele puterii #efortul, notate, şi fluxul, notat f $ şivariabilele energiei #impulsulgeneralizat, notat p, şi deplasarea generalizată, notatăJ $. @ariabilele puterii se mai numesc şivariabilecoenergetice . 6iecăreia dintre cele patru variabile generice menţionate îi corespunde o variabilă conspecifică domeniului din care face parte după cum urmează(− variabilaefort se regăseşte în domeniul circuitelor electrice sub forma mărimii denumită potenţial
u$ sau diferenţă de potenţial #notat∆ D $, în domeniul mişcării mecanice de translaţie sub forma mărdenumită forţă #notată ' $, în domeniul mişcării mecanice de rotaţie sub forma mărimii denumită c#notată M $, în domeniul fluidelor necompresibile variabila denumită presiune sau diferenţă de pr#notată C sau∆ C $ iar în domeniul sistemelor termice variabila denumită temperatură termodin#temperatură absolută$ sau variaţie de temperatură #notată8 sau∆ 8 $1
8<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 77/145
− variabila flu se regăseşte în domeniul circuitelor electrice sub forma mărimii denumită curent el#notatăi$, în domeniul mişcării mecanice de translaţie sub forma mărimii denumită viteză l#notatăv$, în domeniul mişcării mecanice de rotaţie sub forma mărimii denumită viteză ungh#notatăω $, în domeniul fluidelor necompresibile sub forma mărimii debit volumetric #notatăA$ iar îndomeniul sistemelor termice sub forma mărimii denumită flux de căldură #notatăA $1− variabila impuls generalizat se regăseşte în domeniul circuitelor electrice sub forma măridenumită flux magnetic #notatΦ $, în domeniul mişcării mecanice de translaţie sub forma măridenumită impuls #notată p$, în domeniul mişcării mecanice de rotaţie sub forma mărimii denumoment cinetic #notat *$, în domeniul fluidelor necompresibile sub forma mărimii denumită imp presiunii #notat p C $ iar în domeniul sistemelor termice se constată că nu există corespondent al amărimi1− variabila denumitădeplasare generalizată se regăseşte în domeniul circuitelor electrice sub formmărimii denumită cantitate de electricitate #notatăA$, în domeniul mişcării mecanice de translaţie sforma mărimii denumită deplasare liniară #notată $, în domeniul mişcării mecanice de rotaţie mărimdenumită deplasare unghiulară #notată θ $, în domeniul fluidelor incompresibile mărimea denumvolum #notatD $ iar în domeniul sistemelor termice mărimea denumită cantitate de căldură #notatăA$.
"n tabelul =.).) este prezentată concis o vedere generală asupra corespondenţelor dintre mărimile
aparţinând unor domenii fizice diferite împreună cu unităţile de măsură şi relaţiile matematice din2abelul sugerează aspectul unitar al mărimilor necesare descrierii fenomenelor fizice şi deschide calabordări simplificate a studiului acestor fenomene bazată pe similitudinile existente între tipurile de şi între relaţiile dintre ele.Ta+elul *.1.1.a.Mărimi #variabile$ utilizate în modelare & variabilele puterii #@/$ sau var
coenergetice
omenii alefizicii
'fort #e$ 6lux # f $enumire variabilă Aotaţie
uzuală3.m.5.%.
enumirevariabilă
Aotaţieuzuală
3.m.5.%.
*ircuite
electrice
potenţial, tensiune
electricău D@E curent
electrici D E
Mişcare detranslaţie forţă ' DAE viteză
liniară v DmFsEMişcare derotaţie cuplu M DAmE viteză
unghiulară ω DradFsE
6luidenecompresibile
presiune #diferenţă de presiune$
C #∆ C $ DAFm+E debit
volumetric A Dm7FsE
5istemetermice
temperatură termo&dinamică #temperaturăabsolută$ sau variaţiede temperatură
8 #∆ 8 $ DKE flux de
căldură AD FsED E
*.&. $tud!ul compa"at!3 al elementelo" cu ac0!un! t!p!ce 'n p"oce%a"ea ene"#!
"n analiza sistemelor fizice un rol esenţial îl joacă studierea procesării energiei. 'nergia este mafurnizată sistemului ca fiind de un anumit tip şi având anumiţi parametri. 5istemul o procesează modifi parametrii şi eventual tipul iar apoi fie o stochează, fie o eliberează, fie o stochează parţial şi reeliberează. Modelareacu parametri concentra"i a procesării energiei se realizează cu ajutorul unui numărşapte elemente distincte, fiecare având rolul său bine precizat. 6uncţionarea acestor elemente este descrelaţii matematice a căror formă depinde de tipul elementului precum şi de liniaritatea ori neliniacestuia. 'le au fost deja prezentate în capitolul anterior în cadrul fiecărui domeniu energetic. /e baza prezentări, se poate dezvolta în continuare o vedere de ansamblu, unificatoare, asupra fiecăruia din cetipuri de elemente utilizate în modelarea procesării energiei.
88

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 78/145
*.&.1. Elemente ce "eal!(ea() acumula"ea de t!p !ne"0!al 6!nduct!37 a ene"#!e! 6elemente Icest tip de element, notat % şi denumit element inerţial sau inductiv, modelează elementele fizic
acumulează energie printr&un fenomen similar cu acumularea energiei cinetice de către mase #denumirea de acumulare de tip inerţial$ ori acumularea energiei într&un câmp magnetic al unei bobinedenumirea de acumulare de tip inductiv$. 3rmărind elementul inerţial în cadrul capitolului anterior, în domenii ale fizicii, se poate constata comportamentul similar al acestuia constând în modelarea cumatematice de aceeaşi formă în care variabilele se corespund conform tabelului =.).). "n această idee sconcluziona că un astfel de element se regăseşte în toate domeniile energetice abordate, cu excepţia sistermice, şi are aceeaşi formă a caracteristicii de funcţionare precum şi acelaşi mod de calcul al enacumulate. 2abelul =.+.). evidenţiază similitudinea comportamentului elementului inerţial #inducdomeniile energetice în care există, dând astfel posibilitatea unei tratări unitare a acestuia în cadrul msistemelor fizice.
*.&.&. Elemente ce "eal!(ea() acumula"ea de t!p capac!t!3 a ene"#!e! 6elemente C7cest tip de element, notat * şi denumit elementcapacitiv sau condensator , modelează elementele
fizice care acumulează energie printr&un fenomen similar acumulării de energie în câmpul electriccondensator, fapt care justifică denumirea de acumulare de tip capacitiv. şa cum reiese din capianterior, acest element apare în toate domeniile fizicii care au fost abordate şi are un comportasemănător constând în similaritatea relaţiilor matematice în care variabilele se corespund conform ta=.).). stfel se constată aceeaşi formă a caracteristicii de funcţionare şi acelaşi mod de calcul al eneacumulate. ceste aspecte sunt tratate sintetic în tabelul =.+.+, el evidenţiind posibilitatea unei tratări unelementului capacitiv în cadrul modelării sistemelor fizice.
*.&.,. Elemente ce "eal!(ea() d!%!pa"ea ene"#!e! 6elemente R7isiparea energiei în sisteme este modelată de un element, notat :, şi denumitrezistor sau element
disipativ pentru faptul că modelează disiparea energiei în mod similar cu rezistenţa electrică. in capanterior rezultă că acest element este prezent în toate domeniile fizicii care au fost abordate şi
comportament asemănător constând în similaritatea relaţiilor matematice în care variabilele se corconform tabelului =.).). stfel se constată aceeaşi formă a caracteristicii de funcţionare şi acelaşi mocalcul al energiei disipate în unitatea de timp. ceste aspecte sunt tratate sintetic în tabelul =.+.7, el evide posibilitatea tratării unitare a elementului disipativ în cadrul modelării sistemelor fizice.
*.&.*. Elemente ca"e func0!onea() ca %u"%e !deale de pute"e 6elemente $e ! $f 7/uterea este furnizată sistemelor fizice de aşa numitele surse de putere care sunt reprezentate de mo pompe, surse de căldură etc. 'le sunt alese astfel încât să poată elibera puterea necesară sistemului penacesta să&şi poată îndeplini rolul pentru care a fost conceput. upă cum rezultă din capitolul an puterea unei surse se calculează efectuând produsul dintre variabilele puterii numite generic efort şi reflux care, în funcţie de domeniul energetic în care se lucrează, corespund unor mărimi fizice concrete pot găsi în tabelul =.).). /entru modelarea surselor se ţine cont de faptul că, în realitate, una dvariabilele puterii poate fi considerată impusă de sursă #eventual constantă$ iar cealaltă poate să iîntr&un anumit interval în funcţie de necesarul de putere al sistemului, fără a depăşi posibilităţile fizale sursei. e exemplu, o sursă de energie electrică poate avea tensiune constantă şi poate furniza curenintensitatea între anumite limite #sursă de tensiune$ sau poate furniza curent de o anumită intensitatetensiunea între anumite limite #sursă de curent$. "n această idee, modelarea surselor se bazeconceperea unui model denumit sursă ideală de putere care este considerat ca putând furniza oriceavând prestabilită una dintre variabilele puterii. *ealaltă variabilă a puterii se consideră că poate luvaloare necesară pentru a furniza sistemului puterea de care are nevoie, cu alte cuvinte acest model dideală nu este influenţat cu nimic din ceea ce se întâmplă în sistem, sursa ideală putând face faţă uneoricât de mari de putere din partea sistemului.
5&au conceput, pe baza observaţiilor de mai sus, două tipuri de surse ideale de putere, şi anum− surse ideale de efort #notate 5e$ care auvariabila efort prestabilită iar variabila flux rezultând din
funcţionarea sistemului. ceste tipuri de surse sunt prezentate sintetic în tabelul =.+.=, din care
8C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 79/145
gradul larg de generalitate al acestui model, sursele de efort regăsindu&se în toate domeniile enabordate cu respectarea corespondenţei variabilelor conform tabelului =.).).
− surse ideale de flu #notate 5f $ care auvariabila flu prestabilită iar variabila efort rezultând dinfuncţionarea sistemului. ceste tipuri de surse sunt prezentate sintetic în tabelul =.+.=, din care gradul larg de generalitate al modelului, sursele de flux regăsindu&se şi ele în toate domeniile enabordate respectând corespondenţa variabilelor dată în tabelul =.).).
*.&.5. Elemente ce con%e"3) ene"#!a "eal!(Knd t"an%fe"ul pute"!! dup) p"!nt"an%fo"mato"ulu! 6elemente T47"n cursul procesării energiei de către un sistem, pot exista situaţii în care puterea se conservă( însă
cele două variabile ale ei îşi modifică valorile astfel încât produsul lor rămâne constant. 5unt două tielemente ideale care modelează un astfel de transfer de putere, adică modifică în acest mod vvariabilelor puterii. 3nul realizează transferul puterii după principiul transformatorului , iar celălalt după
principiul giratorului .'lementele ideale care modelează transferul puterii după principiul transformatorului, notat
conservă puterea modificând însă valorile variabilelor acesteia utilizând o lege similară cu ceguvernează funcţionarea unui transformator electric, adică raportul de transformare este dat de rdintre tensiunea de ieşire şi cea de intrare şi este totodată egal cu raportul dintre intensitatea curentintrare şi cea a curentului de ieşire. "n majoritatea domeniilor energetice există elemente care se pot astfel, variabilele puterii domeniului energetic respectiv respectând corespondenţa ce este evidenţtabelul =.).). "n capitolul anterior au fost prezentate elementele 26 şi, pe baza similitudinii caracterisde funcţionare, în tabelul =.+.> s&a realizat o prezentare sintetică a acestor elemente evidenţiindu&larg de generalitate al modelului.
*.&.9. Elementele ce con%e"3) ene"#!a "eal!(Knd t"an%fe"ul pute"!! dup) p"!nc!p!ul #!"a6elemente F7
'lementele ideale care modelează transferul puterii după principiul giratorului, notate Qdeosebesc de elementele 26 prin aceea că raportul de transformare este un raport între efortul de ie
fluxul de intrare, respectiv între efortul de intrare şi fluxul de ieşire, deci nu este un raport între variabacelaşi tip. e regulă aceste elemente realizează transferul puterii dintr&un domeniu energetic în alexemplu transferă energie din domeniul mecanic în domeniul electric, conservând puterea. /ăcorespondenţa variabilelor conform tabelului =.).), în tabelul =.+.< se evidenţiază generalitatea unui aelement care, deşi apare mai puţin frecvent în aplicaţii, îşi are aportul său în modelarea sistemelor.
*.,. $tud!ul compa"at!3 al modal!t)0!lo" t!p!ce de conecta"e 6>onc0!un!7
2oate elementele menţionate până acum modelează procesarea energiei în cadrul sistemelo
pentru a modela efectiv circulaţia acesteia în sistem, trebuie luată în discuţie conectarea lor, adică mcare se face transferul energetic de la un element la altul. /entru realizarea conectării există două posicare sunt date de conectarea directă între elemente şi de conectarea prin intermediul unor elemente spde conectare numite @onc"iuni. cestea din urmă se utilizează, de regulă, atunci când este necesaconectarea a mai mult de două elemente care au aceeaşi valoare pentru una din variabilele puterii. 'lde două tipuri( joncţiuni zero, notate ? şi joncţiuni unu, notate ).
*.,.1. Conecta"ea elementelo" ce po%ed) aceea ! 3a"!a+!l) de t!p 6e7 6>onc0!un! =7acă mai multe elemente au aceeaşi valoare pentru variabila de tip #e$, atunci ele se conectează
folosind un element numit joncţiune zero # ?$. "n capitolul anterior s&a arătat modul de utilizafuncţionare a acestei joncţiuni în cadrul unor sisteme care prelucrează diverse tipuri de energie. 2abel
prezintă sintetic ceea ce a fost discutat anterior pe domenii energetice, evidenţiindu&se astfel, corespondenţei dintre variabilele puterii dată în tabelul =.).), posibilitatea de a defini un elemegeneralizat care conectează elemente ce au aceeaşi valoare a variabilei de tip #e$ indiferent de domeniulenergetic căruia îi aparţine elementul conectat. e remarcat că joncţiunea ? conservă puterea.
8;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 80/145
*.,.&. Conecta"ea elementelo" ce po%ed) aceea ! 3a"!a+!l) de t!p 6 f 7 6>onc0!un! 17'lementele care au aceeaşi valoare pentru variabila de tip # f $ se pot conecta folosind un elemen
similar cu ? numit de această dată joncţiune unu # )$. "n capitolul anterior s&a arătat modul de folde funcţionare a acestei joncţiuni în cadrul unor sisteme care prelucrează diverse tipuri de energie. rezultate sunt prezentate sintetic în tabelul =.7.+ pentru a putea remarca mai uşor, pe baza coresponvariabilelor puterii dată în tabelul =.).), că se poate defini un element ) generalizat care conectelemente ce au aceeaşi valoare a variabilei de tip # f $, indiferent de domeniul energetic căruia îi aparţielementul conectat. Ba fel ca şi joncţiunea ?, joncţiunea ) conservă puterea.
*.*. P"e(enta"e %!ntet!c) a e2p"!m)"!lo" cau(ale pent"u le#!le f!(!c!! d!%cante"!o"
5inteza făcută în paragrafele anterioare conduce la posibilitatea de a realiza o privire de ansasupra legilor din diverse domenii energetice ale fizicii bazată atât pe corespondenţa celor patru va#e, f , p şi J $ cât şi pe similitudinea formelor relaţiilor dintre acestea. stfel în orice domeniu energe
care sunt definite cele patru variabile, relaţiile dintre ele au aceeaşi formă generală care se poatesintetic folosind elementele %, * şi :. cest fapt permite să putem raţiona independent de domenergetic în care lucrăm şi să folosim, în scrierea relaţiilor, elementele de natură generală definite a"n figurile =.=.) şi =.=.+ sunt prezentate relaţiile de bază dintre mărimile fundamentalee, f , p şi J , desenuldorind să fie şi un mijloc mnemonic eficient pentru a ilustra aceste relaţii. 5ensul atribuit săgeţilor procesarea cauzală a semnalelor în funcţie de tipul de element generic %, *, sau :. iagramele conţiformă compactă, informaţiile generale referitoare la cele trei tipuri de elemente care se găsesc pe prima fiecăruia dintre tabelele =.+.), =.+.+ şi =.+.7. 5e observă imediat că, datorită liniarităţii, relaţiile =.=.+ reprezintă un caz particular al descrierilor matematice formulate pentru diagrama din fig.=.=.).
ee f f ef &
r & $#$# Ψ Ψ ===(
r &Ψ #:&6Wr$
#%&6Wi$ i I
$#
?
?∫ +t
t
t J # Wi$
#:&6Wc$ c &Ψ
#pWi$ $#?
?∫ +t
t t p
#%&6Wd$ d I
Ψ dt
d # Wd$
#pWd$dt d d
1 Ψ #*&6Wd$
#e$
# p$ #J $
# f $
i1 Ψ #*&6Wi$
#%&'$
∫ =−$#
$#?
?
$#$#$#t p
t p
i I dp pt t Ψ ))
#*&'$
∫ =−$#
$#?
?
$#$#$#t J
t J
i1 dJJt t Ψ ))
#:&'$
4!#. *.*.1. 5imilarităţi în exprimarea legilor fizicii utilizând variabile generalizatee, f , p, J . 4 cazul generalneliniar
C?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 81/145
#%WB&6Wi$ I / )
_
#pWi$ $#
?
?∫ +t
t
t p
#%WB&6Wd$ I / _dt d # Wd$
#pWd$dt d / _ #*WB&6Wd$
#e$
# p$ #J $
# f $
#:WB&'$
#:WB&6Wc$ &/ )
_ &/ _ #:WB&6Wr$
++ ) e/
f / &
& ==(
/ )
_ #*WB&6Wi$
$#
?
?∫ +t
t
t J # Wi$
#%WB&'$
$#
$#
+$#
$#
+
?
??++
)
$#$#
t f
t f
I t p
t p I f
/ p
/
t t
==
=−))
$#
$#
+$#
$#
+
?
??++
)
$#$#
t e
t e
t J
t J e
/ J
/
t t
==
=−))
#*WB&'$
4!#. *.*.&. 5imilarităţi în exprimarea legilor fizicii utilizând variabile generalizatee, f , p, J 4 cazul liniar
*.5. E2emple de %!%teme f!(!ce !lu%t"Knd analo#!! compo"tamentale
şa după cum s&a arătat, între diverse domenii ale fizicii există analogii la nivelul elemefundamentale cu ajutorul cărora se construiesc sistemele precum şi la nivelul modalităţilor de coneacestor elemente. ceste analogii vor fi evidenţiate în continuare cu ajutorul unor sisteme aparţinânddomenii energetice diferite dar care, din punct de vedere structural şi comportamental, sunt analoge.
*.5.1. $!%teme con0!nKnd elemente $e8 R8 C8 conectate p"!n 15e consideră sistemul electric din fig. =.>.), sistemul mecanic cu elemente în mişcare de tran
din fig. =.>.+, sistemul mecanic cu elemente în mişcare de rotaţie din fig. =.>.7, sistemul hidraucurgere laminară din fig. =.>.= şi sistemul termic din fig. =.>.>.
# * $e Je
: ea b
g g
4!#. *.5.1. 5istem electric format dinelementele 5e, :, * şi )
'
( )γ
-
a
4!#. *.5.&. 5istem mecanic în mişcare detranslaţie format din elementele 5e, :, * şi )
# $/ t # $γ t M θ
a
4!#. *.5.,. 5istem mecanic în mişcare de
# $ & f
# $1 f
p?
# $
@
p p C = + ∆?
a b
g
C)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 82/145
rotaţie format din elementele 5e, :, * şi ) 4!#. *.5.*. 5istemul hidraulic format dinelementele 5e, :, * şi )
# $ &t
# $1 t
8 ?
8 8 8 = + ∆?
# $m
a b
g
4!#. *.5.5. 5istem termic format din elementele 5e, :, * şi )
6iecare dintre ele este alcătuit din( un subsistem generator de putere #un elementG e de tip sursă ideală deefort$ care este o sursă de tensiune de mărimee pentru sistemul electric, un motor liniar care furnizeazăforţă ' pentru sistemul mecanic în mişcare de translaţie, un motor rotativ care furnizează un cuplu M pentrusistemul mecanic în mişcare de rotaţie, o pompă care furnizează o diferenţă de presiune LC pentru sistemulhidraulic şi respectiv o sursă de temperatură care furnizează temperatura L8 pentru sistemul termic1 unsubsistem disipativ de energie #un element & de tip rezistiv$ care este o rezistenţa electrică de valoare &e
pentru sistemul electric, un amortizor vâscos liniar având un coeficient de frecare vâscoasăγ pentrusistemul mecanic în mişcare de translaţie, un amortizor vâscos rotativ având coeficientul de frecare vγ t pentru sistemul mecanic în mişcare de rotaţie, un robinet având rezistenţa fluidică & f pentru sistemulhidraulic şi respectiv un perete având rezistenţa termică &t pentru sistemul termic1 un subsistem acumulatde energie #un element * de tip condensator$ care este un condensator electric de capacitate e pentrusistemul electric, un arc liniar având constanta elastică/ e pentru sistemul mecanic în mişcare de translaţiun arc de torsiune având constanta de torsiune/ t pentru sistemul mecanic în mişcare de rotaţie, un rezervde arie constantă : având capacitatea fluidică f pentru sistemul hidraulic şi respectiv o masă de substanţăm
dintr&o incintă încălzită având capacitatea termică t pentru sistemul termic."n cadrul celor cinci tipuri de sisteme, elementele 5e, * şi : au aceeaşi variabilă de tip f #intensitateai
a curentului pentru circuitul electric, vitezav a punctului a pentru sistemul mecanic în mişcare de translaviteza unghiularăω din punctul a pentru sistemul mecanic în mişcare de rotaţie, debitulA pentru sistemulhidraulic şi fluxul de căldurăA pentru sistemul termic$, prin urmare legătura între ele poate fi modelaajutorul unei joncţiuni ). 5ursele nu sunt desenate în mod explicit, ci sunt sugerate numai eforturile ade ele #tensiuneae, forţa ' , cuplul M , presiunea LC respectiv temperatura L8 $ care sunt şi mărimile deintrare notate generic cuu. Mărimile de ieşire, care se notează generic cu %, sunt cantitatea de electricitateJcare trece prin circuit şi se acumulează în condensator pentru sistemul electric #fig. =.>.)$, deplasare
pentru sistemul mecanic în mişcare de translaţie #fig. =.>.+$, deplasarea unghiularăK pentru sistemul
mecanic în mişcare de rotaţie #fig. =.>.7$, volumul de lichidD transportat prin conducte şi acumulat îrezervor pentru sistemul hidraulic #fig. =.>.=$ şi respectiv cantitatea de căldurăA care străbate peretele şi seacumulează în masa de substanţă din incintă pentru sistemul termic #fig. =.>.>.$.
/e lângă o structură fizică analogă, care reiese din cele de mai sus, se va arăta că cele cinci tipsisteme pot fi modelate printr&oecua"ie diferen"ială generică de forma #+.7.)$(
u %/
%/ 1
& =+ ),
în care parametrii/ & şi / capătă semnificaţii corespunzătoare categoriei energetice procesate de sistem."n cazul sistemului electric din fig. =.>.). tensiuneae, furnizată de sursă, este egală cu suma căderil
de tensiuneu & pe rezistenţă şiuc pe condensator(
1 & uue += ./e de altă parte, se pot scrie relaţiile
C+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 83/145
J &i &u ee & ==şi
J
ue
)= ,
care, după înlocuire, conduc la ecuaţia diferenţială care modelează comportarea circuitului
eJ1 J & ee =+ )
.ceasta are forma generică arătată anterior dar cu următoarea semnificaţie a coeficienţilor
e & &/ = şi e1 1 / = ./entru sistemul mecanic din fig. =.>.+ se scrie ecuaţia de echilibru dinamic a lui dS lembert pe
placa de masă neglijabilă din punctul a?=−− ae ' ' ' ,
unde ' e este forţa elastică dezvoltată de arc iar ' a este forţa din amortizor. acă pentru H ? forţa elasticăeste nulă, atunci se pot scrie relaţiile
/ ' ee =şi
v ' a γ γ == ,care, înlocuite în ecuaţia de echilibru dinamic, o aduc la forma
' -/ - e =+γ ,care este de tipul ecuaţiei generice cu precizarea că valorile coeficienţilor sunt
γ = &/ şie
/ /
)= .
Gistemul mecanic din fig. =.>.7 nu conţine mase în rotaţie şi ecuaţia de echilibru dinamic este?=−− ae M M M ,
în care M e este momentul elastic al arcului de torsiune iar M a este momentul de amortizare. acă pentruK H ? momentul elastic este nul, atunci se pot scrie relaţiile
θ = t e / M
şiθ γ ω γ
t t a M == ,care, înlocuite în ecuaţia de echilibru dinamic, o aduc la forma
M / t t =+ θ θ γ ,
care este de tipul ecuaţiei diferenţiale generice cu precizarea că semnificaţia coeficienţilor este
t &/ γ = şit
/ /
)= .
"n cazul sistemului hidraulic cu curgere laminară din fig. =.>.=. diferenţa de presiune LC creată de pompă este egală cu pierderea de presiune din robinet LC r sumată cu presiunea de la baza rezervorului LC vdatorată volumuluiD de lichid, adică
vr C C C ∆∆∆ +=
.3tilizând relaţiileD &A & C f f r
==∆
şiC7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 84/145
D 1
C f
v)=∆
relaţia devine C D
1 D &
f f ∆=+ )
,
adică o ecuaţie diferenţială având aceeaşi formă cu a ecuaţiei diferenţiale generice cu precizasemnificaţia coeficienţilor este
f & &/ = şi f 1 1 / = ."n sistemul termic din fig. =.>.>, diferenţa de temperatură L8 aplicată de sursa de temperatură este
egală cu suma dintre pierderea de temperatură datorată rezistenţei termice a peretelui L8 & şi diferenţa detemperatură corespunzătoare încălzirii masei de substanţă L8 m, adică are loc relaţia
m & 8 8 8 ∆∆∆ += ./e baza relaţiilor
A &8 t & =∆ ,
A1 8 t m
)
=∆ ,se obţine, după înlocuirile corespunzătoare, ecuaţia diferenţială
8 A1
A &t
t ∆=+ ),
care are aceeaşi formă cu ecuaţia diferenţială generică, precizarea că semnificaţia coeficienţilor este
t & &/ = şi t 1 1 / = ./entru toate cele cinci tipuri de sisteme este valabil
aceeaşi schemă bloc reprezentată în fig. =.>.< care estobţinută pe baza ecuaţiei diferenţiale generice, c
precizarea că semnificaţia mărimilor de intrare, de ieşire şi a parametrilor este corespunzătoare tipenergie procesat aşa după cum s&a arătat şi anterior.
eoarece sistemele fizice prezentate sunt modelate cu ajutorul unei ecuaţii diferenţiale genavând forma
,)
u %/
%/ 1
& =+
rezultă că ele pot fi modelate printr&o func"ie de transfer generică (
)$#
+=8s
9 s. ,
factorul de amplificare 9 fiind
1 / 9 = ,iar parametrul8 fiind
1 & / / 8 = ."ntr&adevăr, aplicând transformarea Baplace ecuaţiei diferenţiale, rezultă
$#$#)
$# s, s+ / s s+ / 1
& =+ ,
din care se obţine funcţia de transfer
C=
% %
– &/ )
/ )
u ∫ t d ?
τ
4!#. *.5.9. 5chema bloc corespunzătoare sistemelordin figurile =.>.), =.>.+, =.>.7, =.>.= şi =.>.>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 85/145
))))
$#$#
$# +=+=+
==8s
9 s/ /
/
/ s/ s,
s+ s.
&
&
.
/entru sistemul electric rezultăEsD,E6D eee 1 &8 1 9 == 1
pentru sistemul mecanic în mişcare de translaţie[ ] EsD,Ngs
) +
ee / 8
/ 9
γ == 1
pentru sistemul mecanic în mişcare de rotaţie
[ ] EsD,mNgrads) ++
t
t
t / 8
/ 9
γ == 1
pentru sistemul hidraulic[ ] EsD,Ngsm +=
f f f 1 &8 1 9 == 1
iar pentru sistemul termic
[ ] EsD,sK mNg ++t t t 1 &8 1 9 == .
*.5.&. $!%teme con0!nKnd elemente $e8 R8 I conectate p"!n 13n alt grup de sisteme fizice având comportament analog este format din sistemul electric d
=.>.8, sistemul mecanic cu elemente în mişcare de translaţie din fig. =.>.C, din sistemul mecanic cu eîn mişcare de rotaţie din fig. =.>.; şi din sistemul hidraulic cu curgere laminară din fig. =.>.)?. 6iecareele este alcătuit dintr&un subsistem generator de putere #un element 5e de tip sursă ideală de efort$ care este lfel ca la grupul anterior de sisteme din paragraful =.>.), dintr&un subsistem disipativ de energie #un: de tip rezistiv$ care este la fel ca la grupul anterior de sisteme din paragraful =.>.) şi dintr&un subacumulator de energie #un element % de tip inductor$ care este o bobină de inductanţă * pentru sistemulelectric, o masă de mărimem pentru sistemul mecanic în mişcare de translaţie, un volant de momeninerţie principal central F pentru sistemul în mişcare de rotaţie şi fluidul dintr&o conductă lungă cu culaminară de inductanţă fluidică * f . Au a fost considerat şi un sistem termic deoarece la astfel de sisteme nudefinit un element inerţial.
# & e
# B $ i
e
a b
g
4!#. *.5.:. 5istem electric format dinelementele 5e, :, % şi )
# $m '
# $γ v
4!#. *.5.;. 5istem mecanic în mişcare detranslaţie format din elementele 5e, :, % şi )
# $ F# $γ t
M ω
4!#. *.5.<. 5istem mecanic în mişcare derotaţie format din elementele 5e, :, % şi )
# $ & f # $ * f
p?# $
# $l
p p C = + ∆?
A
g b
4!#. *.5.1=. 5istem hidraulic cu curgere laminarăformat din elementele 5e, :, % şi )
C>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 86/145
Ba fel ca în cazul anterior din paragraful =.>.) şi la acest grup de sisteme elementeleG e, & şi I auaceeaşi variabilă de tip f #reprezentând aceleaşi mărimi fizice$ ceea ce face posibilă modelarea legdintre ele tot cu o joncţiune ).
Mărimile de intrare sunt aceleaşi ca la primul grup de sisteme din paragraful =.>.), dar mărimieşire diferă, ele fiind intensitateai a curentului din circuit pentru sistemul electric, vitezav a maseim pentru sistemul mecanic în mişcare de translaţie, viteza unghiularăω a volantului pentru sistemulmecanic în mişcare de rotaţie şi debitulA al fluidului pentru sistemul hidraulic.
ceste patru tipuri de sisteme au o structură fizică analogă şi se va arăta că pot fi modelate priecua"ie diferen"ială generică de forma #+.7.)$(
u %/ %/ & I =+ ,
în care parametrii/ I şi / & capătă semnificaţii corespunzătoare categoriei energetice căreia îi apasistemul.
Ba sistemul electric din fig. =.>.8 tensiuneae furnizată de sursă este egală cu suma căderilor dtensiuneu & pe rezistenţă şiu * pe bobină(
* & uue += .
*ele două tensiuni se pot scrie i &u e & =şi respectiv
dt di
*u * = ,
care, după efectuarea înlocuirilor corespunzătoare, conduc la ecuaţia diferenţială
ei &dt di
* e =+
ce are aceeaşi formă cu ecuaţia generică, iar semnificaţia coeficienţilor este
*/ I = şi e & &/ = ./entru sistemul mecanic din fig. =.>.C se scrie ecuaţia de echilibru dinamic a lui dS lembert pe
elementul inerţial de masăm. ceasta este?=−− ia ' ' ' ,
unde ' a este forţa datorată amortizoruluiv ' a γ = ,
iar ' i este forţa de inerţie
dt
dvmma '
i == .upă efectuarea substituirilor, ecuaţia de echilibru dinamic devine
' vdt dv
m =+γ ,
adică având aceeaşi formă cu ecuaţia generică şi cu următoarele semnificaţii ale coeficienţilor m/ I = şi γ = &/ .
2ot o ecuaţie de echilibru dinamic a lui dS lembert se scrie şi în cazul sistemului mecanic din fig.=.>.;, dar pentru volantul având momentul de inerţie mecanic F . ceasta este
?=−− ai M M M ,unde M i este momentul forţelor de inerţie
C<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 87/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 88/145
&
I / /
8 = .
/entru sistemul electric rezultă
[ ] EsDE,[D)
Ngms) )+7+
eee & *
8 & &
9 === − 1
pentru sistemul mecanic cu elemente în mişcare de translaţie[ ] EsD,Ngs
)γ γ m
8 9 == 1
pentru sistemul mecanic cu elemente în mişcare de rotaţie
[ ] EsD,mNgrads) +
t t
F 8 9
γ γ == 1
pentru sistemul hidraulic cu curgere laminară
[ ] EsD,Ngms) =
f
f
f &
*8
& 9 == .
*.5.,. $!%teme con0!nKnd elemente $e8 R8 I8 C conectate p"!n 13n ultim grup de sisteme care ilustrează analogiile dintre domeniile fizicii considerate în *apit
şi în cel curent este format din sistemul electric reprezentat în fig. =.>.)+, sistemul mecanic cu elemmişcare de translaţie reprezentat în fig. =.>.)7, sistemul mecanic cu elemente în mişcare de reprezentat în fig. =.>.)= şi sistemul hidraulic cu curgere laminară reprezentat în fig. =.>.)>.
# &e$ b
g
ca
e #1 e$
# * $
i
4!#. *.5.1&. 5istem electric format dinelementele 5e, :, %, * şi )
-
'
# $/ e
# $γ
# $m
4!#. *.5.1,. 5istem mecanic în mişcare de translaţieformat din elementele 5e, :, %, * şi )
# $/ t # $ F # $γ t
M θ
4!#. *.5.1*. 5istem mecanic în mişcare de rotaţieformat din elementele 5e, :, %, * şi )
# * f $# p? R * f $ # & f $
#1 f $l b ca
g
@
p?
4!#. *.5.15. 5istem hidraulic format dinelementele 5e, :, %, * şi )
6iecare dintre ele conţine câte un subsistem generator de putere #un element 5e de tip sursă ideală de efort$care este la fel ca la grupele anterioare de sisteme din paragrafele =.>.), =.>.+, câte un subsistem disipenergie #un element : de tip rezistiv$ care este la fel ca la grupele anterioare de sisteme din para=.>.), =.>.+, câte un subsistem acumulator de energie de tip capacitiv #un element * de tip condensateste la fel cu cel de la prima grupă de sisteme din paragraful =.>.) şi câte un element acumulator de de tip inductiv #un element % de tip inerţial$ care este la fel cu cel de la a doua grupă de sist paragraful =.>.+. Ba fel ca în cazul din paragraful =.>.+, nu a fost considerat şi un sistem termic deoastfel de sisteme, nu a fost definit elementul inerţial.
'lementele componente ale acestor ultime patru sisteme au aceeaşi variabilă de tip f #reprezentând
aceleaşi mărimi fizice$ ceea ce face posibilă, şi în acest caz, modelarea legăturii dintre element joncţiune ).Mărimile de intrare ale fiecărui sistem din grup sunt aceleaşi ca şi în cazurile anterioar
paragrafele =.>.), =.>.+. Mărimile de ieşire sunt cantitatea de electricitateJ pentru sistemul electric,
CC

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 89/145
deplasarea pentru sistemul mecanic cu elemente în mişcare de translaţie, unghiul de rotaţieK pentrusistemul mecanic cu elemente în mişcare de rotaţie şi volumul de fluidD pentru sistemul hidraulic cu curgerelaminară.
*ele patru tipuri de sisteme nu sunt analoge numai din punct de vedere structural ci sunt analdin punct de vedere al comportamentului dinamic în sensul că ele sunt modelate de un set de ecuaţii istare&ieşire având forma generică #+.=.7$, #+.=.=$(
u/ -
-
/ /
/ / - -
I I
&
I 1
+−−= )?) )?+
)
+
) ,
[ ]=+
)?)
% ,
unde ) are semnificaţie de variabilă de tip deplasare generalizată #J $ pentru domeniul energetic respectiv, ia + are semnificaţia de flux # f $ pentru acelaşi domeniu, iar parametrii/ I , / &, / , capătă semnificaţiicorespunzătoare.
/entru sistemul electric din fig. =.>.)+, tensiunea sursei este egală cu suma dintre căderea de tens pe rezistenţău &, căderea de tensiune pe bobinău * şi căderea de tensiune pe condensatoru , adică are locrelaţia
* & uuue ++= ,unde
i *dt di *ui &u *e &
=== , şi J
ue
)= .
upă efectuarea substituţiilor, rezultă ecuaţia diferenţială
e
*
i
*
&J
*1
i e
e
)) +−−= .
/e de altă parte avem ecuaţia diferenţialăiJ = .
3ltimele două ecuaţii se scriu sub forma matriceală
e
*i
J
* * i
J
e
+−−= )?
:e))?
.
*um variabila de ieşire este cantitatea de electricitateJ , se poate scrie ecuaţia de ieşire
[ ]= iJJ ?) ,
obţinându&se astfel setul de ecuaţii intrare&stare&ieşire pentru sistemul din fig. =.>.)+ sub form precizată cu J =) şi i =+ şi cu următoarea semnificaţie a coeficienţilor
e & I e1 &/ */ 1 / === ,, .
"n cazul sistemului mecanic cu elemente în mişcare de translaţie reprezentat în fig. =.>.)7, ecuaţiechilibru dinamic a lui dS lembert pentru corpul de masăm este
?=−−− iae ' ' ' ' ,în care ' e este forţa elastică din arc având expresia
/ ' ee =
C;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 90/145
pentru situaţia în care, în poziţia iniţială, arcul este netensionat, ' a este forţa din amortizor care are expresiav ' a γ = ,
iar ' i este forţa de inerţie care are expresiavm ' i = .
upă înlocuiri, ecuaţia de echilibru dinamic capătă forma.
) '
mv
m
m/
v e +−−= γ
acă se ţine cont căv = ,
atunci ultimele două ecuaţii diferenţiale pot fi scrise sub forma matriceală
'
mv
-
mm
/
v
-e +
−−
= )?)?
γ .
*um variabila de ieşire este deplasarea a maseim, se poate scrie ecuaţia de ieşire
[ ] =v
?) ,
rezultând astfel setul de ecuaţii intrare&stare&ieşire pentru sistemul din fig. =.>.)7 sub forma precizată la început, cu următoarea semnificaţie a coeficienţilor
γ === & I e
/ m/ /
/ ,,)
.
Gistemul mecanic cu elemente în mişcare de rotaţie din fig. =.>.)= se poate modela prin scriecuaţiei de echilibru dinamic a lui dS lembert pentru volantul sistemului
?=−−− iae M M M M ,
în care M e este momentul elastic de formaθ t e / M = ,
M a este momentul din amortizor care are formaω γ t a M = ,
iar M i este momentul de inerţie care are formaω F M i = .
'fectuând substituţiile în ecuaţia de echilibru dinamic, se obţine ecuaţia diferenţială
M F F F
/ t t )+−−= ω γ
θ ω ,
care împreuna cu ecuaţia diferenţialăω θ =
formează sistemul de ecuaţii diferenţiale de stare care se scrie matriceal de forma
M
F F F
/ t t +−−= )?)?
ω
θ γ
ω
θ .
;?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 91/145
*um variabila de ieşire este unghiul de rotaţieθ , se poate scrie ecuaţia de ieşire
[ ]= ω θ θ ?) ,
rezultând astfel setul de ecuaţii intrare&stare&ieşire pentru sistemul din fig. =.>.)= sub forma generică pînceput, cu θ =) şi ω =+ şi cu următoarea semnificaţie a coeficienţilor
t & I t
/ F / / / γ === ,,) .
"n cazul sistemului hidraulic cu curgere laminară din fig. =.>.)> presiunea∆ C creată de pompă esteegală cu suma dintre căderea de presiune pe robinet∆ C r , căderea de presiune pe conductă∆ C c şi presiuneade la baza rezervorului∆ C v datorată volumuluiD de lichid din rezervor, adică are loc relaţia
vcr C C C C ∆∆∆∆ ++= ,unde
A & C f r =∆ ,
A * C f c =∆ ,
D 1
C f
v)=∆ .
upă efectuarea substituţiilor, se obţine ecuaţia diferenţială
C *
A *
&D
*1 A
f f
f
f f ∆
)) +−−= ,
la care se adaugă ecuaţia
AD =
pentru a forma sistemul de ecuaţii diferenţiale de stare care au forma matriceală
C *A
D
*
&
*1 A
D
f f
f
f f
∆+−−= )?
))?
.
*um variabila de ieşire este volumulD din rezervor, atunci se poate scrie ecuaţia de ieşire
[ ]= AD D ?) ,
care, împreună cu sistemul diferenţial anterior, formează setul de ecuaţii intrare&stare&ieşire pentrudin fig. =.>.)> având forma generică prezentată la început cu A D == +) , şi cu următoarea semnificaţie acoeficienţilor
f & f I f 1 &/ */ 1 / === ,, .
/e baza formei generice a sistemului de ecuaţii diferenţiale, se poate desena o schemă bloc valabilă pentru toate cele patru tipuri de sisteme aşa cum se arată în fig. =.>.)<, cu precizarea că semnmărimilor de intrare, de ieşire, de stare şi a parametrilor este corespunzătoare tipului de energie proce
;)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 92/145
) N %
–
u
I / )
/ &
/ )
– 2∫ t d ? τ ∫ t d ? τ
4!#. *.5.19. 5chema bloc corespunzătoare sistemelor din figurile =.>.)+, =.>.)7, =.>.)= şi =.>.)>
2ot pe baza sistemului generic de ecuaţii intrare&stare&ieşire fiecare sistem poate fi modelat func"ie de transfer de ordinul doi de forma
)+$#
++ ++=
8s s8
9 s.
ξ ,
în care 9 , 8 ,ξ se numesc factor de amplificare, constantă de timp, respectiv factor de amortizare #de ex#%onescu );C>$, #@oicu );;C$$ şi sunt specifici fiecărui tip de sistem în parte.
*onform #+.=.7)$, funcţia de transfer va fi
( ))
$#+
)
++=−= −
s/ / s/ /
/ b sc s.
& I
8 AI ,
rezultând că factorul de amplificare este
1 / 9 = ,
iar parametrii8 şi ξ sunt
I
1 & I 1 /
/ / / / 8
+)
, == ξ .
6actorul de amplificare şi cei doi parametri capătă semnificaţii specifice pentru fiecare tip de sastfel că pentru sistemul electric rezultă
*1
& *1 8 1 9 eeee +
)E,sD6E,D === ξ DadimensionalE,
pentru sistemul mecanic în mişcare de translaţie rezultă
eee m/ / m8
/ 9
γ ξ +)E,sDFNgE,sD) + === DadimensionalE,
pentru sistemul mecanic în mişcare de translaţie rezultă
t
t
t t F/ / F 8
/ 9
γ ξ +)E,sDE,mFNgsD) ++ === DadimensionalE,
iar pentru sistemul hidraulic rezultă
f
f f f f f *
1 & *1 8 1 9
+)
E,sDFNgE,smD += === ξ DadimensionalE.
:olul celor trei paragrafe care au compus secţiunea curentă este de a evidenţia faptul că, plasân
în domenii energetice diferite şi operând cu sisteme fizice prezentândanalogii din punct de vedere al structurii , vom constata şianalogii la nivel comportamental , modelele matematice construite fiind izomorfnalogia la nivel de structură a constat în alegerea unor elemente din domenii fizice diferite care procenergia într&o manieră similară, iar conectarea lor este realizată în acelaşi mod.
;+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 93/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 94/145
/rincipiul fundamental al metodei exploatează faptul că universul exterior furnizează sistemufiecare moment, o anumită putere #energie pe unitatea de timp$, care poate fi exprimată în toate dofizicii, ca produs al semnalelor perechee şi f , ceea ce permite descrieri de tip acauzal. 2otodată, prasignarea semnificaţiilor de cauză şi efect pentru semnalele implicate în astfel de descrieri, se pot cmodele cauzale, de factura celor prezentate în *apitolul +, care au o largă răspândire în activitatea teinginerească.
/roblematica abordată în acest capitol este structurată pe secţiuni după cum urmează(>.). *oncepte specifice limbjului bond&graph.>.+. *onstrucţia bond&graph&ului.>.7. *onstrucţia modelelor bazată pe bond&graph&uri fără cauzalitate derivativă.>.=. 'xemple ilustrative de modelare în cazul bond&graph&ului fără cauzalitate derivativă.>.>. *onstruirea modelelor bazată pe bond&graph&uri conţinând cauzalitate derivativă.
5.1. Concepte %pec!f!ce l!m+a>ulu! +ond #"ap
Ba baza metodei menţionate stă observaţia că, între elementele componente ale unui sistem
tehnic, are loc, în timpul funcţionării, untransfer de putere de la un element la altul. Aatura fizică a acest puteri poate fi diversă şi, de fapt, marele avantaj al metodei constă tocmai în neimplicarea naturii con puterii transmise în elaborarea modelului. cest lucru a condus la considerarea unornota"ii generice pentruvariabilele puterii şi anume(e #efort $ şi f # flu $. stfel puterea se calculează cu relaţia generală N ef , undee şi f dobândesc semnificaţii corespunzătoare domeniului energetic concret în care se lucrează. semnificaţii au fost comentate în capitolele anterioare.
3n alt aspect important constă în aceea că, pentru construirea oricărui model al unui sistem fcare pot să apară diverse tipuri de energie, se utilizează un număr de doar nouă elemente standard gece au fost introduse, pe domenii energetice, în capitolul 7 şi ulterior, au fost tratate unitar în capitolul
2oate aceste constatări permit dezvoltarea unuilimba@ grafic denumitbond-graph #terminologieîmprumutată din literatura anglo&americană şi care s&a generalizat în toată literatura de speindiferent de limbă, în româneşte, traducându&semot-O-mot prin graf de legături sau de conexiuni$. 'conduce la ometodologie riguroasă de construire a modelelor de intrare&stare&ieşire şiFsau diagramfiecărui sistem fizic corespunzându&i un bond&graph ce trebuie privit drept un model grafic echimodelele analitice amintite mai sus. ^ond&graph&urile posedă proprietatea remarcabilă de a pune în cu foarte multă uşurinţă,izomorfismul comportamental al sistemelor de natură fizică diferită.
5.1.1. Elemente %tanda"d pent"u p"oce%a"ea ene"#!e! ut!l!(ate 'n metoda +ond #"apupă cum am menţionat, în modelul bond&graph se utilizează un număr de nouă elemente sta
cu caracter general care se regăsesc în fiecare domeniu energetic ca fiind corespondentele unui especific domeniului, aşa după cum rezultă din capitolul anterior.
ceste elemente sunt(). 'lemente #%$ care realizeazăacumularea de tip inductiv a energiei numite şielemente inductive sauelemente iner"iale .
+. 'lemente #*$ care realizeazăacumularea de tip capacitiv a energiei numite şielemente capacitive .7. 'lemente #:$ care realizeazădisiparea energiei numite şielemente rezistive .=. 'lemente #5e$ care sunt furnizoare ideale de energie cu variabila de tipe prestabilită, numite surse ideale
de efort .>. 'lemente #5f $ care sunt furnizoare ideale de energie cu variabila de tip f prestabilită, numite surse ideale
de flu .<. 'lemente #26$ care conservă energia şi realizeazătransformarea parametrilor puterii legând variabilele
de tipe între ele şi variabilele de tip f între ele, produsulef rămânând constant, numitetransformatoare .
8. 'lemente #Q $ care conservă energia şi realizeazătransformarea parametrilor puterii legând variabilelede tipe cu cele de tip f , produsulef rămânând constant, numite giratoare .C. oncţiuni zero # ?$ care realizeazăconectarea unor elemente caracterizate prin aceea că posedăaceea#i
variabilă de tip e .
;=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 95/145
;. oncţiuni unu # )$ care realizeazăconectarea unor elemente caracterizate prin aceea că posedăaceea#ivariabilă de tip f .
5.1.&. Bondu"! 6Le#)tu"! 'nt"e elementele %tanda"d7*ele nouă elemente standard menţionate anterior sunt suficiente pentru a modela cu param
concentraţi orice sistem fizico&tehnic indiferent de tipurile de energie care sunt procesate de către atimpul funcţionării, puterea este transmisă de la un element la altul, modelarea căilor de transm
acesteia realizându&se prin aşa numitelebonduri #termen utilizat în literatura anglo&americană şi caregeneralizat în toată literatura de specialitate, indiferent de limbă, în limba română corespunztraducereamot-O-mot legătură sau conexiune$.
^ondurile se reprezintă grafic prin linii care au desenată la un capăt o semisăgeată . stfel, în fig.>.).)#a$ sunt desenate simbolic două elemente standard notate cu şi ^ între care există un b5emisăgeata orientează bondul de la către ^, ceea ce arată că puterea este furnizată de elementul şi primită de elementul ^. :eprezentarea grafică standard a transferului de putere între elementele şi ^ arătată în fig. >.).)#b$. e o parte şi de alta a bondului se scriu variabilelee şi f , ele fiind plasate, conformunei convenţii generale, astfel încât variabilae să se găsească de aceeaşi parte cu semisăgeata.
^ e ^
6a7
( H e f
6+7
4!#. 5.1.1. :eprezentarea unui bond
Gensul transferului puterii este stabilit de către cel care realizează modelul, pe baza analizei efectasupra modului de desfăşurare a proceselor fizice din sistem. in punctul de vedere al fiecărui element, i se atribuie un semn stabilit convenţional astfel( puterea care părăseşte elementul are semnul 4, iar puteeste furnizată elementului are semnulR.
/e un bond se transmite putere şi există simultan cele două variabile ale puterii. "n aceste condiţfiecare bond poate fi descris prin două semnale şi anume, unul corespunzând variabileie şi celălalt
corespunzând variabilei f conform fig. >.).+#a şi b$. *onvenţia grafică de reprezentare a semnalelor es săgeată completă . 5e observă că cele două semnale corespunzătoare unui bond au sensuri opuse. 5săgeţilor arată că un element generează un semnal #e sau f $ pe care celalalt element îl recepţionează şi la rândsău, furnizează primului element semnalul complementar # f sau e$ corespunzător celeilalte variabile a puterrespectând relaţia N ef . "n raport cu un element precizat apar astfel noţiunile decauză şi deefect care seasociază celor două semnale ale puterii corespunzând celor două variabile ale acesteia. *ând una din veste, pentru elementul precizat, semnal cauză, atunci cealaltă variabilă devine, pentru acelaşi element, efect. stfel pentru conectarea ilustrată în fig. >.).+.a$, pentru elementul estecauză semnalul f şi esteefectsemnalule, în timp ce pentru elementul ^ estecauză semnalule şi esteefect semnalul f . 2otodată, se constatăcă în fig. >.).+.b$, rolul semnalelor cauză şi efect se schimbă pentru elementele şi ^. /roblema referitorelaţiile de tipcauză-efect se numeşte în generalcauzalitate . 'a se pune pentru fiecare element în parte.
f
e ^
f
e ^
6a7 6+7
4!#. 5.1.&. :eprezentarea semnalelore şi f corespunzătoare unui bondeoarece, în modelare, problema cauzalită"ii deţine un rol fundamental, s&a convenit ca pe bond
dintre două elemente #reprezentat conform fig. >.).).b$$ să se marcheze şi cauzalitatea.onven"ia graficăconstă în ataşarea uneiliniu"e cauzale #eng . causal stroNe$ perpendiculară pe linia bondului lângă elemece aredrept cauză semnalul de tipe. rept consecinţă, dacă lângă un elementnu este figurată liniuţăcauzală, atunci el are dreptcauză un semnal de tip f . "n baza acestei convenţii, pentru cele două moduri conectare ilustrate cu ajutorul semnalelor în fig. >.).+, avem reprezentarea grafică echivalentă din figîn care se utilizează bond&uri cauzale. "n fig. >.).7.a$ liniuţa cauzală se plasează lângă elementul ^, i>.).7.b$, lângă elementul .
;>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 96/145
^6a7
^6+7
4!#. 5.1.,. :eprezentarea schematizată a cauzalităţii pe bonduri
5pre a face distincţie între fig. >.).).b$ şi fig. >.).7 #a şi b$ se spune că în fig. >.).).b$bond-ul este acauzal ,în timp ce în fig >.).7 #a şi b$bond-urile sunt cauzale . tragem explicit atenţia asupra faptului că cele dousimboluri grafice existente pe orice bond cauzal #semisăgeata şi liniuţa cauzală$ au semnificaţii fizice
şi drept consecinţă, plasarea oricăruia dintre cele două simboluri estecomplet independentă de plasareaceluilalt. stfel, între două elemente oarecare , ^ pot exista patru conexiuni cauzale conform fig. >.).= b, c, d$.
^ ^ ^ ^6a7 6+7 6c7 6d7
4!#. 5.1.*. 5ituaţiile posibile pentru transferul puterii şi pentru cauzalitate care pot să apară pe un bond.
"n fig. >.).= #a şi b$transferul de putere are loc de la elementul către elementul ^, semnalul de tie fiindcauză pentru elementul #fig. >.).=.a$, respectiv pentru elementul ^ #fig. >.).=.b$. "n fig. >.).=
d$ transferul de putere are loc de la elementul ^ către elementul , semnalul de tipe fiindcauză pentruelementul #fig. >.).=.c$, respectiv pentru elementul ^ #fig. >.).=.d$. 2rebuie remarcat că se poafirmaţii complete şi despre rolul de cauză al semnalului de tip f .
5.1.,. Po"tu"!3n element poate să primească sau să transmită putere la unul sau la mai multe elemente. 6ie
perechi #e, f $, deci fiecărei puteri care intră într&un element sau îl părăseşte, îi corespunde un aşa num port ,adică un punct de intrare sau de ieşire a puterii #un punct de transmitere a puterii$. /rin urmare noţiu
port se asociază transferului de putere pentruo singură pereche de semnale #e, f $, ceea ce arată că fiecărui port îi corespunde, în reprezentarea grafică, un bond #acauzal sau cauzal & deoarece transferul de puindependent de atribuirea cauzalităţii$. Modul de tratare de mai jos este în spiritul generalităţii pe pregătit&o *apitolele 7 şi =.'lementele standard de tip #%$, #*$, #:$, #5e$ şi #5f $ procesează o singură pereche #e, f $, motiv pentrucare se numescelemente uniport . 'lementelor uniport li se asociazăun singur bond . 'lementele#uniporturile$ #%$, #*$ şi #:$ sunt denumite pasive , întrucât rolul lor este numai de a procesa puterea prim0 detaliere a aspectelor specifice este prezentată în tabelele >.).), >.).+ şi respectiv >.).7.
'lementele #uniporturile$ #5e$, #5f $ sunt denumiteactive , întrucât furnizează putere. tragem atenţiaasupra faptului că în condiţiile existenţeimai multor surse , una sau mai multe dintre acestea se pot afla îsituaţia de aconsuma puterea furnizată de altă #alte$ sursă #surse$. spectele specifice sunt prezenttabelul >.).=.
'lementele standard de tip #26$ şi #Q $ procesează două perechi #e, f $, drept pentru care suntdenumiteelemente diport . "n reprezentarea grafică, elementelor diport li se asociazădouă bond-uri . 0detalierea a aspectelor specifice privind utilizarea elementelor #26$ şi #Q $ în construcţia bond&graeste prezentată în tabelele >.).> şi respectiv >.).<.
'lementele standard de tip # ?$ şi # )$ procesează, în general,n perechi #e, f $, drept pentru care suntdenumiteelemente n-port sau multiport . "n reprezentarea grafică, elementelorn&port li se asociazăn bond-uri . 0 detaliere a aspectelor specifice privind utilizarea joncţiunilor ? şi ) în construcţia bond&graph&u prezentă în tabelele >.).8 şi respectiv >.).C.
5.&. Con%t"uc0!a +ond #"ap ulu!
^ond&graph&ul asociat unui sistem fizic se construieşte în două etape, având următoarele obieEtapa 'ntK!a & obţinerea unui bond4graphacauzal , care descrie numaitransferul de putere întreelementele standard #utilizând bonduri acauzale$.
;<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 97/145
Etapa a doua & obţinerea unui bond4graphcauzal , care descrie atâttransferul de putere cât şicauzalitatea elementelor #prin transformarea bondurilor acauzale în bonduri cauzale în urma proces de atribuire cauzală$.
5.&.1. Con%t"uc0!a +ond #"ap ulu! acau(al"n funcţie de natura sistemului #subsistemului$ fizic luat în discuţie, există o metodologie
organizată care permite construcţia bond4graph&ului acauzal. in punct de vedere al teoriei grafurilor
graph&ul acauzal rezultat va poseda dreptnoduri elementele standard utilizate în modelare şidrept arce , bond&urile cu săgeţile impuse de sensul considerat pentru transferul puterii. /recizarea valorilor para pe bond&graph se poate realiza cu ajutorul semnului diacritic ( #două puncte$, urmat de valoarea în
5.&.1.1. Ca(ul %!%temelo" elect"!ce8 !d"aul!ce ! te"m!ce"n urma analizei fenomenologice a sistemelor electrice, hidraulice şi termice, din punct de v
fizic se poate constata existenţa unor analogii evidente, ceea ce a condus la posibilitatea tratării unmetodologiei de construcţie a bond&graph&ului unui astfel de sistem. Metodologia elaborată c parcurgerea a şase etape care sunt următoarele(). 5e introduce câte o joncţiune ? pentru fiecare punct caracterizat printr&un potenţial #presiu
temperatură$ bine precizat.+. 5e introduce câte o joncţiune ) pentru fiecare element 5e sau 5f , %, * sau : şi se ataşează prin bond&u
aceste elemente. %ntroducerea fiecărei joncţiuni ) se face între două joncţiuni ?, #în conformstructura sistemului fizic$, trasând şi bond&urile aferente între joncţiuni #fără semisăgeţi$.
7. 5e introduc elementele 26 şiFsau Q .=. 5e asignează pe bond&uri sensul semisăgeţilor, corespunzător transferului de putere.>. 5e identifică existenţa joncţiunilor ? caracterizate printr&un potenţial #presiune, sau temperatură$ de
care poate fi consideratnul #de exemplu, masa unui circuit electric, presiunea atmosferică într&un hidraulic etc.$. 0 astfel de joncţiune ? se elimină #ca nod din reprezentarea de tip graf$, împreună cu toarcele aferente deoarece, din punct de vedere numeric, nu are nici o contribuţie la bilanţul variabitip e în joncţiunile ).
<. 5e efectuează simplificări în graful rezultat pe baza regulilor generale prezentate în paragraful >.+O+%e"3a0!e@ *onform celor precizate în *apitolul 7 paragraful 7.=.+ produsul variabilelor flucăldură şi temperatură considerate de tip # f $ şi respectiv #e$nu reprezintă( dimensional( o putere . in acestmotiv, se va spune că metoda bond&graph pentru sisteme termice va conduce la un pseudo bond-graph .
"n scopul exemplificării metodologiei de construire a bond&grafului pentru sisteme electrice, hidtermice se consideră sistemele cu comportări similare studiate în ultima secţiune a *apitolului = şi asistemele din paragraful =.>.) #figurile =.>.), =.>.=,.=.>.>$, sistemele din paragraful =.>.+ #figurile =.>şi sistemele din paragraful =.>.7 #figurile =.>.)+, =.>.)>$.
E2emplul 5.&.1./entru sistemul electric din fig. =.>.), conform etapei ), se consideră câte o joncţiune ? pe
punctele a, b şi g #masa$ care corespund fiecare câte unui potenţial #D a, D b, D g $ 4 a se vedea fig. >.+.).5ursa de tensiune devine o sursă 5e care furnizează otensiuneu HD a 4 D g , rezistenţa un element : de valoare &e
supus unei diferenţe de potenţial #D a 4 D b$, iarcondensatorul un element * de valoare e supus uneidiferenţe de potenţial #D b 4 D g $. ceste trei elemente,conform etapei +, se leagă fiecare de câte o joncţiunecare se plasează între joncţiunile ? corespunzătoa potenţialelor la care sunt conectate. 5e trece apoi la etapa#etapa 7 nu are obiect deoarece nu avem elemente 26Q $ şi se asignează pe bond&uri semisăgeţicorespunzător transferului de putere. stfel, pentru csursa furnizează tensiune, semisăgeata este orientată sp joncţiunea ), iar pentru că elementele * şi : absorb
;8
G e )
? ) ?
)
#D a$ a b #D b$
&
?g #D g $
4!#. 5.&.1.ond&graph&ul nesimplificat al

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 98/145
energie semisăgeţile bondurilor corespunzătoare lor sunt orientate către ele. /entru a stabili sensul rsemisăgeţilor, se ţine cont de faptul că sunt suma potenţialelor pe joncţiunile ) este zero, adică p joncţiunea ) corespunzătoare sursei avemu D g – D a H ?, ceea ce arată că diferenţa de potenţial pe sureste u N D a – D g , fapt ce corespunde realităţii. /rin urmare, conform convenţiei de semne,u si D g avândsemnul plus intră în joncţiunea ) iarD a iese din ea deoarece are semnul minus. nalog se judecă pent joncţiunea ) corespunzătoare elementului *. stfel căderea de tensiuneu pe * esteu N D b – D g deci
avem 4u D b – D g H ?, deciu şi D g ies din joncţiune iarD b intră în ea #semnul minus al luiu dinrelaţia constitutivă anterioară este dat de sensul semisăgeţii bondului, sens generat de faptul că * ab putere$. cum joncţiunile ? corespunzătoare punctelor a şi b au câte unul dintre cele două bondufiecăreia dotat cu semisăgeată. eoarece puterea care intră într&o joncţiune trebuie să şi pără joncţiunea, atunci rezultă automat sensul semisăgeţilor pe bondurile ce leagă aceste joncţiuni joncţiunea ) corespunzătoare elementului :. "n acest moment toate bondurile sunt orientate. 5e trecela etapa > şi, considerând potenţialul din g nul, se poate renunţa la joncţiunea ? din g şi la bonaferente ei, rezultând bond&graph&ul din fig. >.+.+.
G e )
? ) ?
)
a b
&
1
G e )
&
4!#. 5.&.&. ^ond&graph&ul rezultat dupăeliminarea joncţiunii ? de potenţial nul
4!#. 5.&.,. ^ond&graph&ul acauzal al sistemuluielectric din fig. =.>.)
"n ultima etapă are loc simplificarea bond&graph&ului prin eliminarea joncţiunilor ? diconform paragrafului >.+.).7. "n fig. >.+.7 este reprezentat bond&graph&ul acauzal în formă finală.
E2emplul 5.&.&.5istemul termic din fig. =.>.>. conţine o sursa de temperatură 5e #nefigurată$ de la care trece fluxutermic printr&un perete cu rol de rezistenţă termică de valoare &t spre o incintă au rol de capacitate termică
de valoare t care se încălzeşte prin acumularea unei cantităţi de căldură. 5ursa, fiind considerată idfurnizează orice cantitate de flux termic la temperatura8 N 8 a – 8 g raportată la o temperatură de referinţă8 gconsiderată nulă #care poate fi ? K$ ce corespunde potenţialului g din sistemul electric anterior. :eztermică este supusă unei diferenţe de temperatură8 a – 8 b care există între cele două feţe ale peretelui întcare trece un flux termic.
2emperatura8 a este a feţei peretelui dinspre sursă iar temperatura8 b este a feţei peretelui dinspreincintă. "n incintă există o masăm de substanţă care se încălzeşte de la o temperatura iniţială8 g latemperatura8 b a feţei dinspre incintă a peretelui, adică substanţei îi creşte temperatura cu diferenţa8 b – 8 g .:ezultă că avem trei temperaturi care corespund punctelor a, b şi g, fiecăreia trebuind să îi corespu bond&graph câte o joncţiune ? cu temperatura8 a, 8 b şi respectiv8 g . "ntre joncţiunile ? corespunzătoaretemperaturilor8 a şi 8 g se introduce o joncţiune ) de care se leagă sursa de temperatură 5e, între joncţiunile ?corespunzătoare temperaturilor8 b şi 8 a se introduce o joncţiune ) de care se leagă rezistenţa termică : iîntre joncţiunile ? corespunzătoare temperaturilor8 b şi 8 g se introduce o joncţiune ) de care se leagăcapacitatea termică *. 5e ajunge astfel la bond&graph&ul din fig. >.+.= care este identic cu cel din figîn care orientarea bondurilor s&a făcut pe baza unor consideraţii similare celor de la sistemul electrirolul potenţialelor electrice este jucat de temperaturi.
;C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 99/145
5implificarea acestui bond&graph se face tot ca sistemul anterior, ajungându&se în final la o formă idencu cea din fig. >.+.7.
E2emplul 5.&.,.5istemul hidraulic din fig. =.>.=. este similar
structură cu cele analizate până acum, în sensul că el conţo sursă de presiune 5e #o pompă$ nefigurată, o rezistenţă hidraulică : de valoare & f #un robinet$ şi ocapacitate hidraulică * de valoare f #un rezervor$, toate înseriate. ^ond&graph&ul acestui sistem>.+.>$ este identic cu al sistemelor anterioare şiobţine urmând aceeaşi succesiune a etapelor. icînsă se consideră în locul unui potenţial de referinţă, sal unei temperaturi de referinţă, o presiune de referinţă?
corespunzătoare punctului g care poate fi consideratănulă, dar, de obicei, este considerată presiuneaatmosferică. /resiunea furnizată de pompă este
p N p a – p ?, căderea de presiune pe robinet este p a – p b, presiunea la baza rezervorului este pb – p ?. :ezultă că punctelor a, b şi g le corespund presiunile pa, pb şirespectiv p g cărora li se asociază câte o joncţiune ? bond graph&ul nesimplificat rezultând cu aceeaşistructura ca a celorlalte două sisteme anterioare.
e remarcat că, în cazul sistemelor electrice,hidraulice şi termice, elementele constitutive funcţionează la o diferenţă de potenţial, la o difere presiune sau la o diferenţă de temperatură, toate aceste diferenţe raportându&se la un potenţial de rla o presiune de referinţă sau la o temperatură de referinţă valabile pentru întregul sistem. ceastă mde referinţă poate fi cu adevărat nulă #de exemplu potenţialul zero la masa sistemului electric$ saavea o valoare nenulă #presiunea atmosferică la un sistem hidraulic$ dar, fiind o mărime de revaloarea ei poate fi considerată nulă #i se poate atribui valoarea zero în raport cu o scară aleasă de de către modelator fără ca acest lucru să afecteze modelul bond&graph.
E2emplul 5.&.*.3n alt exemplu de sistem hidraulic este cel din fig. =.>.)?. 'l se compune dintr&o sursă de pre
#o pompă$ nefigurată, o conductă de lungimel care este unelement hidraulic inerţial % de valoare * f si un robinet careeste o rezistenţă hidraulica : de valoare & f . /entru a construi bond&graph&ul, se determină mai întâi presiunile cărorava asocia câte o joncţiune ?. cestea sunt presiunea dreferinţă p? #presiunea atmosferică$ din punctul g, presiunde refulare a pompei pa în punctul a care coincide cu presiunea de la începutul conductei şi presiunea de la celălcapăt al conductei pb în punctul b care coincide cu presiunede la intrarea în robinet. upă asocierea câte unei joncţiuni
fiecărei presiuni se înserează o joncţiune ) de care se leagăeîntre joncţiunile zero corespunzătoare punctelor g şi a, joncţiune ) de care se leagă elementul hidraulic inerţial % î joncţiunile ? corespunzătoare punctelor a şi b şi o joncţiun
;;
5 e )
? ) ?
)
# pa$ a b # pb$
%
:
4!#. 5.&.9. ^ond&graph&ul sistemului din fig.=.>.)? după eliminarea joncţiunii ?
corespunzătoare presiunii de referinţă
5 e )
%
:
4!#. 5.&.:. ^ond&graph&ul simplificat alsistemului din fig. =.>.)?
5 e )
? ) ?
)
#8 a$ a b #8 b$
:
*
?g #8 g $
4!#. 5.&.*. ^ond&graph&ul nesimplificat alsistemului din fig. =.>.>
5 e )
? ) ?
)
# pa$ a b # pb$
%
:
?g # p?$
4!#. 5.&.5. ^ond&graph&ul nesimplificat alsistemului hidraulic din fig. =.>.=.

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 100/145
de care se leagă elementul hidraulic disipativ : între joncţiunile ? corespunzătoare punctelor b şi poate trece acum la asignarea pe bonduri a sensului semisăgeţilor. eoarece suma puterilor pe joncţ) este zero iar presiunea de refulare a pompei raportată la p? este p H pa 4 p? rezultă că avem relaţia
p – p a p P N ? adică p şi p? intră în joncţiunea ) corespunzătoare sursei iar pa iese din ea #semnul presiuni p trebuie să fie plus, deoarece ea intră în joncţiune fiind furnizată de sursă$.
"n ceea ce priveşte joncţiunea ) corespunzătoare elementului :, deoarece căderea de presiuneeste p & N p b – p ? iar puterea p & se scurge către : deci are semnul minus, rezultă relaţia 4 p & p b – p ? H ?,adică pb intră în joncţiune iar p? iese din ea. ^ondul elementului % are semisăgeata orientată spre elemîntrucât acesta absoarbe putere. *elelalte doua bonduri ale joncţiunii ) sunt orientate pe baza faptuîn joncţiunile ? din a şi b puterea intră pe un bond şi iese pe celalalt. cum bond&graph&ul sesimplifica prin eliminarea joncţiunii ? din g, obţinându&se bond&graph&ul din fig. >.+.<.
"n continuare bond&graph&ul sistemului se mai poate simplifica eliminând cele două jonrămase şi contopind apoi toate joncţiunile ) într&una singură. 5e obţine bond&graph&ul din fig. >.+
E2emplul 5.&.5.5istemul electric din fig. =.>.8. este similar cu cel hidraulic din fig. =.>.)? care a fost prez
anterior. 'l este compus dintr&o sursă de tensiune 5e care este înseriată cu o rezistenţă : de valoare &e şi cu
o bobină % de inductanţă * . in punct de vedere al metodei bond&graph, cele două sisteme sunt identi bond&graph&ul propriu&zis al sistemului electric este acelaşi cu cel al sistemului hidraulic din >.+.=, cu observaţia că elementul inerţial este bobina, iar cel rezistiv o rezistenţă electrică.
E2emplul 5.&.9.5ă considerăm acum cazul sistemului electric din fig. =.>.)+. 'l este format dintr&o sur
tensiune înseriată cu o rezistenţă electrică : de valoare &e, cu o bobina % de valoare * şi cu un condensator* de valoare e. 5e consideră câte o joncţiune ? pentru punctele a, b, c şi g care corespund potenţiaD a, D b, D c şi respectivD g . "ntre aceste joncţiuni ? se introduce câte o joncţiune ) de care se leagă elem bond&graph 5e, :, % si * corespunzătoare sursei de tensiune, rezistenţei electrice, bobinei şi respcondensatorului. 5e obţine o prima formă a bond&graph&ului care este arătată în fig. >.+.C.
5 e )
? ) ?
#D a$ a b #D b$
:
*
?g #D g $
)
%
?
c #D c$
)
4!#. 5.&.;. ^ond&graph&ul nesimplificat al sistemului electric din fig. =.>.)+ Aeavând elemente 26 şi Q se trece la etapa a patra, adică se stabilesc sensurile semisăgeţilo
bonduri corespunzător sensului puterii. 5ursa furnizează energie, deci semisăgeata acestui element es joncţiunea ), iar pentru elementele :, % şi *, deoarece disipă sau acumulează energie, semisăgeata estelement. acă u este tensiunea la sursă, atunci avemu N D a – D g , adicău – D a D g H ? #relaţie ce reflectăconservarea puterii$, ceea ce arată că bondul corespunzător luiD a are săgeata spre exteriorul joncţiunii ) iacel corespunzător luiD g către joncţiunea ), fapt care rezultă din convenţia de semne aplicată relaţieconservare a puterii. /entru elementul *, dacău este tensiunea aplicată elementului, avemu N D c – D g ,ceea ce conduce lauc D c – D g H ?, deci bondul corespunzător luiD g este orientat spre g iar bondul
)??

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 101/145
corespunzător luiD este orientat către joncţiunea ) corespunzătoare lui *. cum se pot orienta şi celeladouă bonduri ale joncţiunilor ? corespunzătoare luiD a şi D c. Mai rămân de orientat bondurile dintr joncţiunea ? a luiD b şi cele două joncţiuni ) adiacente. ^ondul dintre joncţiunea ? a luiD b şi joncţiunea )corespunzătoare elementului % este orientat către cea din urmă întrucât în ea trebuie să intre putere printr&un port. ceasta face ca bondul dintre joncţiunea ? a luiD b şi joncţiunea ) corespunzătoareelementului : să fie orientat către prima pentru că şi pentru ea trebuie să existe un bond prin care sa
putere. cum toate bondurile sunt orientate."n etapa a cincea se elimină joncţiunea ? corespunzătoare potenţialuluiD g care este considerat nul. 5eobţine bond&graph&ul din fig. >.+.;.
5 e )
? ) ?#D a $ a
b #D b$
:
*
)
%
? c #D c$
)
5 e )
:
*
%
4!#. 5.&.<. ^ond&graph&ul sistemului din fig. =.>.)+rezultat după eliminarea joncţiunii ? de potenţial nul
4!#. 5.&.1=. ^ond&graph&ul acauzal alsistemului electric din fig. =.>.)+
5e trece la etapa a şasea şi se simplifică bond&graph&ul utilizând regulile din paragraful >.+.)7elimină joncţiunile ? corespunzătoare potenţialelorD a, D b şi D c şi apoi toate joncţiunile ) se contopesc în unsingură. ^ond&graph&ul simplificat este prezentat în fig. >.+.)?.
E2emplul 5.&.:.5istemul hidraulic din fig. =.>.)> are o structură similară cu sistemul electric anterior, adic
format dintr&o sursa de efort 5e #o pompă, nefigurată$ înseriată cu un element inerţial % #o conductă lucare curgerea este laminară$, cu un element disipativ : #un robinet$ şi cu un element capacitiv * #un r
de fluid$. /otenţialelorD
a , D
b,D
c,D
g din sistemul electric le corespund presiunea p
a furnizată de pompă, presiunea pb de la ieşirea din robinet, presiunea pc de la intrarea în rezervor şi respectiv presiunea dreferinţă p g corespunzătoare presiunii atmosferice. "n mod similar ca la sistemul electric, se consideră joncţiune ? pentru fiecare presiune şi între ele câte o joncţiune ) corespunzătoare elementelor 5e, %, : şi *rezultând astfel un bond&graph nesimplificat ca cel din fig. >.+.;. upă simplificare, se obţine totgraph&ul din fig. >.+.)?.
5.&.1.&. Ca(ul %!%temelo" mecan!ce cu elemente 'n m! ca"e de t"an%la0!e %au de "ota0!e/entru sistemele mecanice metodologia de construire a bond&graph&ului unui sistem are
structură decât pentru sistemele electrice, hidraulice sau termice dar cuprinde tot şase etape carurmătoarele(). 5e introduce câte o joncţiune ) pentru fiecare punct caracterizat printr&o viteză bine precizată #
element inerţial impune o viteză bine precizată$.+. 5e introduc, în poziţii adecvate, joncţiunile ? necesare pentru a stabili expresiile tuturor vitezelo
trasează bond&urile aferente #fără semisăgeţi$.7. "n joncţiunile ) se ataşează, prin bond&uri, elemente 5e, 5f , %, * sau :.=. 5e introduc elemente 26 şiFsau Q .>. 5e asignează pe bonduri sensul semisăgeţilor, corespunzător transferului de putere.<. 5e efectuează simplificări în graful rezultat pe baza regulilor generale prezentate în paragraful >.+
/entru a exemplifica modul de construire a bond&graph&ului pentru sistemele mecanice urmşase etape enunţate, se consideră sistemele studiate în ultima secţiune a *apitolului = şi anume( sistem
paragraful =.>.) #figurile =.>.+, =.>.7$, din paragraful =.>.+ #figurile =.>.C, =.>.;$ şi din paragr#figurile =.>.)7, =.>.)=$.E2emplul 5.&.;.
)?)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 102/145
5istemul mecanic cu elemente în mişcare de translaţie din fig. =este format dintr&un arc având constanta elastică/ e şi un amortizor avândconstanta de amortizareγ . 'le au câte o extremitate prinsă de un acelaşi perete fix iar celelalte două extremităţi sunt acţionate simultan în puncde o forţă ' . 5istemul nu conţine elemente cu masă #elemente inerţiale$consideră o joncţiune ) pentru vitezava de deplasare a forţei împreună cuextremităţile arcului şi amortizorului care constituie şi viteza de deforma acestor din urmă elemente. Au este nevoie de vreo joncţiune ?, deoarnu există alte viteze în sistem care să fie în relaţie cu vitezava. 5e poatetrece acum la etapa a treia care constă în ataşarea, prin bonduri,
joncţiunea ) a unui element 5e pentru forţa ' , a unui element : pentru arcul elastic şi a unui element pentru amortizor. /e aceste trei bonduri se poate deduce foarte uşor sensul semisăgeţilor pe baza faptsursa furnizează putere deci semisăgeata va fi orientată către joncţiunea ) şi a faptului că elementele GconsumăG putere #o disipă sau o stochează$ şi deci semisăgeţile pe bondurile corespunzătoare orientate dinspre joncţiunea ) către ele. 5e obţine în final, bond&graph&ul acauzal reprezentat în figidentic cu cel din fig. >.+.7.
E2emplul 5.&.<.5e consideră acum sistemul mecanic cu elemente în mişcare de rotaţie reprezentat în fig. =.>.7
compune dintr&un arc de torsiune cu constanta elastică/ t şi un amortizor pentru rotaţie cu constanta damortizareγ t . 'le au în punctul a câte o extremitate în comun în care acţionează un moment M , iar celelaltedouă extremităţi sunt prinse de puncte fixe. 5istemul nu conţine elemente cu masă #elemente ine5ingura viteză din sistem pentru care se consideră o joncţiune ) este viteza unghiularăω a din punctul a. eaceastă joncţiune ) se ataşează prin bonduri o sursă de efort 5e pentru momentul M , un element capacitiv * pentru arcul de torsiune şi un element : pentru amortizorul de rotaţie. 5ensul semisăgeţilor pe ce bonduri este către joncţiunea ) pentru elementul 5e şi dinspre joncţiunea ) pentru elementele : şi * datorităaceloraşi motive ca la sistemul anterior. ^ond&graph&ul acestui sistem este identic cu cel din fignumai că în loc deva este viteza unghiularăω a.
E2emplul 5.&.1=.3n alt sistem mecanic cu elemente în mişcare de rotaţie este cel reprezentat în fig. =.>.;. cesta
compus dintr&un element inerţial în rotaţie având momentul principal de inerţie în raport cu axa de F ,dintr&o sursă de efort care furnizează un moment M şi dintr&un amortizor de rotaţie cu constanta
amortizareγ t . @itezei de rotaţie a volantuluiω care este şi vitezacare acţionează asupra amortizorului, i se asociază o joncţiune )care se ataşează prin bonduri o sursă 5e, un element inerţial % şi unelement disipativ : care corespund respectiv momentului M , masei înrotaţie de moment principal de inerţie F şi amortizorului de rotaţie cucoeficientul de amortizareγ t . /e bondul sursei semisăgeata esteorientată către joncţiunea ) deoarece ea furnizează putere, iar pe bonelementului inerţial şi al rezistorului semisăgeata este orientată s
aceste elemente deoarece ele acumulează energie. 5e obţine bond&graph&ul acauzal al sistemului aşaarătat în fig. >.+.)+, care este identic cu cel din fig. >.+.8.
E2emplul 5.&.11.5e consideră un alt sistem mecanic cu elemente în mişcare de translaţie arătat în fig. =.>
prezintă o structură similară cu sistemul din fig. =.>.;, în sensul că are o sursă de efort care furnizează ' ce acţionează asupra unui element inerţial de masăm a cărui vitezăv este impusă extremităţii unuiamortizor de constantă de amortizareγ , adică are acelaşi tip de elemente şi la fel conectate cu diferenţaîn loc de mişcări de rotaţie sunt mişcări de translaţie. @itezeiv a maseim îi corespunde în bond&graph joncţiune ) de care se ataşează prin bonduri cele trei elemente 5e, % şi * pe care semisăgeţile sunt orientate fel ca la sistemul anterior. 5e obţine un bond&graph acauzal ca cel din fig. >.+.)+ cu diferenţa căcorespunzătoare joncţiunii ) estev şi nuω a.
)?+
5 e )
:
*va
4!#. 5.&.11. ond&graph&ulacauzal al sistemului mecanic
reprezentat în fig. =.>.+
5 e )
%
: a
4!#. 5.&.1&.^ond&graph&ul acauzal

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 103/145
E2emplul 5.&.1&.3n alt sistem mecanic cu elemente în mişcare de translaţie este cel reprezentat în fig. =.>.)7. 'l
constituit dintr&o sursa de efort 5e care furnizează o forţă ' ceacţionează asupra unui element inerţial % de masăm şi de care este prinsă extremitatea unui arc având constanta elastică/ e şiextremitatea unui amortizor : având constanta de amortizareγ .@itezeiv a maseim, care este şi viteza de deformare a arcului şiamortizorului, i se atribuie o joncţiune ) de care se ataşează p bonduri sursa 5e, elementul inerţial %, elementul condensator *elementul rezistor :.
Aumai pe bondul sursei semisăgeata este orientată căt joncţiunea ) deoarece ea furnizează putere, iar pe celelalte t
bonduri semisăgeata este orientată către elementele %, * şi :, deoarece ele absorb energie pe care o stosau o disipă. ^ond&graph&ul acauzal al sistemului este arătat în fig. >.+.)7 şi se observă că este idendin fig. >.+.)?.
E2emplul 5.&.1,.*orespunzător acestui sistem mecanic cu elemente în mişcare de translaţie, în fig. =.>.)= este
un sistem mecanic cu elemente în mişcare de rotaţie având o structură similară, conţinând din puvedere al metodei bond&graph, aceleaşi elemente şi la fel conectate. stfel sistemul conţine un einerţial % de moment principal de inerţie F rotit cu o viteză unghiularăω de un moment furnizat de o sursă deefort 5e, viteză cu care se roteşte şi extremitatea unui element : reprezentat de un arc de torsiune aconstanta elastică/ t şi extremitatea unui element * reprezentat de un amortizor având constantamortizareγ t . ^ond&graph&ul sistemului este identic cu cel din fig. >.+.)7 cu singura deoseb joncţiunea ) este asociată vitezeiω şi nu vitezeiv.
nalizând toate exemplele date, se constată ca s&au obţinut bond&graph&uri identice pentrucare procesează tipuri diferite de energie dar a căror structură este similară din punct de vedere al tipelemente şi al modului de conectare al acestora.
stfel, sistemele din figurile =.>.), =.>.+, =.>.7, =.>.=. şi =.>.> au un model bond&graph coanume cel din fig. >.+.7, sistemele din figurile =.>.8, =.>.C, =.>.;, =.>.)? au modelul bond&graph>.+.8, iar sistemele din figurile =.>.)+, =.>.)7, =.>.)=, =.>.)> au modelul bond&graph din fig. >.+.)?.
cest fapt vine în sprijinul ideii de generalitate a metodei bond&graph, idee ce a fost deja sugecapitolele anterioare şi va fi întărită în continuare prin rezultatele din capitolele următoare.
5.&.1.,. Re#ul! de %!mpl!f!ca"e a +ond #"ap u"!lo" acau(aleupă construirea bond&graph&urilor, pot să apară situaţii în care acestea permit efectuare
simplificări. 5ituaţiile respective sunt prezentate în continuare.). oncţiunile #? sau )$, care aunumai două bond-uri şi doaruna dintre cele două semisăge"i intră în
respectiva joncţiune, pot fi îndepărtate, conform fig. >.+.)= a$ şi b$.e
f )?
e
f +
e
f ) H f +
e)
f )
e+
f H
e) H e+
f 6a7 6+7
H
4!#. 5.&.1*. *azuri de eliminare a joncţiunilor
+. ouă joncţiuni de acelaşi tip #? sau )$ pot fuziona, conform fig.>.+.)> a$ şi b$.
)?7
5 e )
%
*
:
v
4!#. 5.&.1,. ^ond&graph&ul acauzal alsistemului mecanic din fig. =.>.)7.

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 104/145
e
f )
e=
f
e
f 6a7H
e) f e+ f
)
e7 f
e+ f
)
e7 f e)
f
6+7e
f ?
e
f =
e
f H
e f ) e f +
?
e f 7
e f +
?
e f 7e
f )
4!#. 5.&.15. :eguli de simplificare a joncţiunilor 7. acă două #generalizabil la mai multe$ elemente #%)$, #%+$, având parametrii/ I ) , / I +sunt conectate(
în aceeaşi joncţiune ?, atunci acestea se înlocuiesc printr&un singur element #%$, conform fig. >.+.)<. având parametrul(
$#
$#
+)
+)
I I
I I I / /
/ / /
+= 1 #>.+.)$
în aceeaşi joncţiune ), atunci acestea se înlocuiesc printr&un singur element #%$, conform f b$, având parametrul(
+) I I I / / / += . #>.+.+$
+(%+ I /
?
)(%) I /
e f )e
e
e f 7
f + f ?
( )+)+)(% I I I I I / / / / / +=
f ) R f +e
ee f 3 f 6a7
+)(% I I I / / / +=
)(%) I /
)
e) f e7
e+
e f
f f )
e) R e+ f
e7e f f
6+7
+(%+ I /
4!#. 5.&.19. :eguli de simplificare a elementelor %.
)?=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 105/145
=. acă două #generalizabil la mai multe$ elemente #*)$, #*+$, având parametrii/ ) , / + sunt conectate(în aceeaşi joncţiune ?, atunci acestea se înlocuiesc printr&un singur element #*$, conform fig. >.+.)8 a$având parametrul(
+) / / / += 1 #>.+.7$în aceeaşi joncţiune ), atunci acestea se înlocuiesc printr&un singur element #*$, conform fig. >.+.)8 b$având parametrul(
$#
$#
+)
+)
1 1
1 1 1 / /
/ / /
+= . #>.+.=$
+(* + /
+(* + /
)(* ) 1 /
?
)(* ) 1 /
e f )e
e
e f 7
f + f ?
+))(* / / / +=
f ) R f +e
ee f 3 f
)
e) f e7
e+
e f
f
f )
$#(*+)+) 1 1 1 1 1 / / / / / +=
e) R e+ f
e7e f f
6a7
6+7
4!#. 5.&.1:. :eguli de simplificare a elementelor *
>. acă două #generalizabil la mai multe$ elemente #: )$, #: +$, având parametrii/ &) , / &+ sunt conectate(în aceeaşi joncţiune ?, atunci acestea se înlocuiesc printr&un singur element #:$, conform fig. >.+.)C a$având parametrul(
$#
$#
+)
+)
& &
& &
& / /
/ / /
+= 1în aceeaşi joncţiune ), atunci acestea se înlocuiesc printr&un singur element #:$, conform fig. >.+.)C b$având parametrul(
+) & & & / / / += .
)?>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 106/145
++ (: &/
+)(: & & & / / / +=
)(: ) &/
?
)(: ) &/
e f )e
e
e f 7
f +
f ?
( )+)+))
(: & & & & & / / / / / +=
f ) R f +e
ee f 7 f
++ (: &/
)
e) f e7
e+
e f
f f )
e) R e+ f
e7e
f f
6a7
6+7
4!#. 5.&.1;. :eguli de simplificare a elementelor :
5.&.&. Con%t"uc0!a +ond #"ap ulu! cau(al/ornind de la bond 4 graph&ul acauzal, se vor parcurge paşii metodologiei prezentate mai
scopul de aasigna #sau atribui , aloca $ cauzalitatea fiecărui element #adică, în limbaj grafic, pentru a ata
câte o liniu"ă cauzală fiecărui bond$. /entru fiecare element standard se va face apel la detalierea paragraful >.).7. Metodologia respectivă exploatează un număr de principii privind propagarea cauzalită"iiimpuse de(
sursele ideale 5e şiFsau 5f 1descrierea funcţionării elementelor acumulatoare de energie, % şiFsau *, prinlegi constitutive n formaintegrală. Casul 1
).). 5e alege o sursă şi se marchează cauzalitatea impusă de aceasta.).+. /entru unele bond&uri adiacente rezultă unmod unic de asignare a cauzalităţii, datorită regulilo
specifice elementelor standard ?, ), 26, Q .).7. 5e repetă subpaşii ).) şi ).+ pentru toate sursele.
Casul 2+.). 5e alege un element % sau * şi i se asignează #atribuie$cauzalitatea integrală.+.+. 5e aplică operaţii analoge subpasului ).+, datorită faptului că subpasul +.) se finalizează prin a
liniuţei cauzale la un nou bond.+.7. 5e repetă paşii +.). şi +.+. pentru toate elementele acumulatoare de energie.
Casul 37.). 5e alege un element : şi i se asignează cauzalitatea #rezistivă sau conductivă$ în mod convenabi7.+. 5e aplică operaţii analoge subpasului ).+, datorită faptului că subpasul 7.) se finalizează prin at
liniuţei cauzale la un nou bond.
7.7. 5e repetă paşii 7.). şi 7.+. pentru toate elementele disipatoare de energie.O+%e"3a0!e@'xistă situaţii când, în pasul +, utilizarea cauzalităţii integrale pentru toate elemen% şi *nu este posibilă , fapt ce se reflectă prin violarea regulilor de asignare a cauzalităţii pentru unu
)?<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 107/145
mai multe elemente ?, ), 26, Q . "n astfel de cazuri, se va alegecauzalitatea derivativă pentru unul,eventual mai multe elemente acumulatoare de energie.
2oate bond&urile grafului cauzal se numerotează #uzual în ordinea naturală$, dar numero poate face şi pe bond&graph&ul acauzal, fie înainte, fie după efectuarea eventualelor simplificări.
/entru a exemplifica regulile de atribuire a cauzalităţii pe bonduri se va considera bond&grdin fig. >.+.7, care corespunde sistemelor din figurile =.>.), =.>.+, =.>.7, =.>.=, =.>.>, bond&grafig. >.+.8, care corespunde sistemelor din figurile =.>.<, =.>.8, =.>.C , =.>.; şi bond&graph&ul dincare corespunde sistemelor din figurile =.>.)?, =.>.)), =.>.)+ şi =.>.)7.
E2emplul 5.&.1*Ba bond&graph&ul acauzal din fig. >.+.7 se aplică sub&pasul ).) şi se asignează cauzal bond
de efort, liniuţa cauzală trebuind să fie desenată la capătul dinspre joncţiunea ) aşa cum este arătat>.+.);.a deoarece sursa aplică un efort joncţiunii şi nu invers. cest lucru nu induce cauzalitatevreunul din celelalte două bonduri. 5e poate trece acum la pasul + şi, conform subpasului +.), seelementul * căruia i se asignează cauzalitatea integrală, rezultând bond&graph&ul din fig. >.+.);.b.
5 e )
:
* 5 e )
:
* 5 e ) * @/ ) +
7
&/ (:
6a7 6+7 6c74!#. 5.&.1<. tribuirea cauzală a bond&graph&ului din fig. >.+.7
"n acest moment, deoarece dintre cele trei bonduri incidente în joncţiunea ) două au liniuţa cspre joncţiune, obligatoriu cel de al treilea bond, care corespunde elementului :, va trebui să aibă lcauzală la capătul dinspre element căci numai în felul acesta se respectă regula de atribuire cauz
bondurile incidente într&o joncţiune ) #numai unul nu trebuie să aibă liniuţa cauzală spre joncţiuobţine astfel bond&graph&ul cauzal arătat în fig. >.+.);.c, nemaifiind necesară trecerea la pasul 7. "nnumerotează bondurile şi se scriu parametrii elementelor precedaţi de două puncte.
E2emplul 5.&.15tribuirea cauzalităţii pe bondurile bond&graph&ului acauzal din fig. >.+.8 începe cu bondul s
efort pe care se desenează liniuţa cauzală lângă joncţiunea ) #fig. >.+.+?.a$.
5 e )
%
: 5 e )
%
: 5 e ) : ( / &) 7
+
% ( / I
6a7 6+7 6c74!#. 5.&.&=. tribuirea cauzală a bond&graph&ului din fig. >.+.8
cest lucru nu induce cauzalitate pe bondurile adiacente. 5e trece la pasul al doilea şi se atribuie eleme% cauzalitate integrală. #fig. >.+.+?.b$. "n aceste condiţii el aplică pe joncţiunea ) un flux, ceea ccauzalitatea pe bondul elementului :, cu liniuţa cauzală către joncţiune #fig. >.+.+?.c$ şi atrcauzalităţii este încheiată. poi se numerotează bondurile şi se scriu parametrii elementelor.
E2emplul 5.&.19"n cazul bond&graph&ului din fig. >.+.)?, după primul pas, numai bond&ul sursei de efort ar
cauzală #fig. >.+.+).a$. 5e trece la al doilea pas şi se atribuie cauzalitate integrală elementului % #fig. ceasta face ca, spre joncţiunea ), să fie transmis un flux. in acest motiv, bondurile elementelor * şi : vavea în mod obligatoriu liniuţa cauzală către joncţiune #fig. >.+.+).c$. cum atribuirea cauzală este fin
)?8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 108/145
şi se numerotează bondurile. 5e pot scrie, de asemenea, parametrii elementelor, între element şi par punându&se semnul diacritic două puncte.
&/ (:
5 e )
:
* 5 e )
:
* 5 e ) * ( / )
+
7
% %
=
%( / I
6a7 6+7 6c74!#. 5.&.&1. tribuirea cauzala a bond&graph&ului din fig. >.+.)?.
upă atribuirea cauzală a bond&graph&ului unui sistem este posibil ca, pentru a nu încălca racestei atribuiri, să fie obligatoriu a avea elemente % şiFsau * în cauzalitate derivativă. cest fapt evitat ori de câte ori este posibil, întrucât acest gen de cauzalitate conduce la apariţia unor dificurezolvarea sistemului de ecuaţii de stare care devine un sistem de ecuaţii algebrice şi diferenţiale,cazul utilizării în modelarea cu diagrame bloc, conduce la apariţia unor blocuri de derivare care adesea erori de calcul.
5.,. Con%t"uc0!a modelelo" +a(at) pe +ond #"ap u"! f)") cau(al!tate de"!3at!3)
"n această secţiune ne referim numai la situaţia când tuturor elementelor acumulatoare de eneeste atribuită cauzalitate integrală.
/e baza bond&graph&ului cauzal se pot construi două modele ale sistemului studiat. 3n primeste cel denumit intrare&stare&ieşire în care ecuaţiile se scriu urmărind circulaţia puterii pe bondu privind structura şi unele proprietăţi ale modelelor intrare&stare&ieşire sunt prezentate în *apsecţiunile +.= şi +.> pentru cazul liniar şi secţiunea +.< pentru cazul neliniar. 3n al doilea model edenumit diagramă bloc, în care fiecare element din bond&graph este înlocuit, în mod corespunzătoanumit tip de bloc, iar, în final, aceste blocuri, legate între ele, formează diagrama bloc a întregului "n secţiunea +.8. din *apitolul + sunt furnizate informaţii de bază privind utilizarea şi interpdescrierilor de tip schemă bloc.
5.,.1. Con%t"uc0!a unu! model !nt"a"e %ta"e !e !"e"n cazul generalneliniar formularea ecuaţiilor de stare se face în variabilele energiei p şi J . "n acest
scop se scriu ecuaţiile corespunzătoare tuturor elementelor % şi * în cauzalitate integrală$#$# t et p I I = , #>.7.)&a$$#$# t f t J 1 1 = . #>.7.)&b$
6iecaree I #t $ şi respectiv f #t $ se explicitează cu ajutorul ecuaţiilor algebrice care descriu comporelementelor :, ?, ), 26, Q . 3lterior, prin intermediul relaţiilor constitutive de forma
$# I i
I I p f Ψ = , #>.7.+&a$
$# 1 i
1 1 Je Ψ = , #>.7.+&b$
membrii drepţi ai tuturor ecuaţiilor diferenţiale #>.7.)$ se pot exprima numai în funcţie de I p , 1 J şivariabilele corespunzătoare surselor. 5e obţine astfel forma standard a unei ecuaţii vectoriale de sgeneral neliniare de tipul #+.<.)$, conform celor prezentate în *apitolul +. /resupunând că sistemul n I elementele de tip % şin elemente de tip *, rezultă că reprezentarea de stare de forma #+.<.)$ va fi fordin I nnn += ecuaţii diferenţiale având drept variabile de stare p I #t $,J #t $, iar drept variabile de intraresemnalele generate de surse. *u alte cuvinte, variabilele de stare sunt variabilele energiei desemnate a
)?C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 109/145
impulsul generalizat #mărimea p$ pentru elementele %deplasarea generalizată #mărimeaJ $ pentru elementele *.
"n funcţie de obiectivul urmărit se va adăuga ecuaţia ieşirii #+.<.+$ conform *apitolului +."n cazul în care pentru elementele %, *, şi : se consideră legi constitutivede tip liniar , reprezentarea
intrare&stare&ieşire va fi de forma #+.=.7$ şi #+.=.=$ conform capitolului +, reflectând la nivelul întrliniaritatea dinamicii. "n acest caz al dinamicii liniare, pe baza relaţiilor constitutive ale elementelovariabilele de stare de tip energetic # p I şi J & toate sau numai o parte din ele$ pot fi transformate în variab puterii # f I şi respective $.
/recizăm că în cazulliniar formularea ecuaţiilor de stare se poate facedirect n variabilele puteriidesemnând variabilele de stare astfel(
fluxul #mărimea f I $ pentru elementele %1efortul #mărimeae $ pentru elementele *.
stfel, fiecărui element % i se asociază o ecuaţie diferenţială cu forma generică
$#)
$# t e/
t f I I
I = , #>.7.7&a$
undee I #t $ urmează a fi explicitat cu ajutorul ecuaţiilor algebrice care descriu comportarea elementelo), 26 şi Q . "n mod similar pentru fiecare element * avem, într&o scriere generică
$#)
$# t f /
t e
= , #>.7.7&b$
unde f #t $ urmează a fi explicitat cu ajutorul ecuaţiilor algebrice care descriu comportarea elementelo), 26 şi Q .
:evenind la cazul general neliniar, pentru scrierea ecuaţiilor de stare este util ca, mai întâi, identifice trei mulţimi de variabile(a$ variabilele de intraree#t $ şi f #t $ corespunzătoare surselor de efort şi flux1 b$ variabilele p I şi J asociate elementelor % şi respectiv * aflate în cauzalitate integrală #varia
energiei$1c$ variabilele coenergetice f I şi e ale elementelor % şi respectiv * aflate în cauzalitate integrală #varia puterii$.
/entru a facilita scrierea ecuaţiilor, este adesea util să se scrie aceste variabile lângă legăturile pe bond&graph. @ariabilele p I şi J asociate elementelor % si respectiv * aflate în cauzalitate integralăapărea scrise lângă bondurile corespunzătoare sub forma derivatelor I p şi 1 J , care sunt eforturi şi fluxuri.@ariabilele f I pentru % şie pentru * asociate cu derivatele I p şi 1 J pot, sau nu, să fie scrise lângă bondurile corespunzătoare. 'le vor fi eliminate în ecuaţiile finale.
/entru exemplificare, va fi prezentată construirea modelului intrare&stare &ieşire pentrusisteme ale căror bond&graph&uri cauzale au fost deja obţinute.
E2emplul 5.,.1.
5e va considera mai întâi, bond&graph&ul din fig >.+.);.c care corespunde sistemelor reprezefigurile =.>.), =.>.+, =.>.7, =.>.= şi =.>.>, din capitolul precedent, paragraful =.>.).
eoarece bond&graph&ul are o singură sursă, va fi o singură variabilă de intrare şi anumee). easemenea, elementului * în cauzalitate integrală îi corespunde variabila de stareJ + şi variabila coenergeticăe+, ecuaţia constitutivă a acestuia fiind(
++)
J/
e
= .
Begile constitutive ale joncţiunii ) sunt(7)+ f f J == ,?+7) =−− eee ,
)?;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 110/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 111/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 112/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 113/145
=.>.8$. /entru a scrie ecuaţia de stare în funcţie de intensitate, se face apel la legea constitutivă a b#elementul %$ şi la derivata acesteia, care sunt #datorită ipotezei de liniaritate$(
* p
*i +++ == Φ ,
respectiv,
*
p
*dt
di +++ == Φ .
5ubstituind în ecuaţia de stare, rezultă următoarea ecuaţie având ca necunoscută intensitatea curelectric
)++ ei &
dt di
* e =+ .
b$ /entru sistemul mecanic cu elemente n mi#care de transla"ie din fig. =.>.C,/ & este constanta deamortizare DA sFmE, iar/ I este masam DNgE. 'cuaţia de stare se scrie
)++ ' pm
p =+ γ ,
unde p+ este impulsul maseim iar ' ) este forţa aplicată acesteia de către sursă #notată ' în fig. =.>.C$. eobicei, în mecanică, interesează legea de mişcare, adică deplasarea + a masei ca funcţie de timp, şi pentru o determina, se utilizează legea constitutivă a elementului %
++)
pm
=
care, împreună cu ecuaţia anterioară, formează un sistem de două ecuaţii diferenţiale de ordinul întâi.eoarece ne situăm în cazul liniar, se poate obţine o ecuaţie în variabila vitezăv+ #notatăv în fig.
=.>.C$, ţinând cont că
+++ v f m
p == ,din care rezultă
+++ v f
m p == .
5ubstituind în ecuaţia de stare, se obţine(
)++ ' vvm =+γ .
c$ /entru sistemul mecanic cu elemente n mi#care de rota"ie din fig. =.>.; ,/ & este constanta deamortizare t DA m sFradE, iar/ I este momentul de inerţie principal F DNg m+E în raport cu axa de rotaţie. 'cuaţiade stare se scrie
)++ M * F
* t =+ γ ,
unde * + este momentul cinetic, iar M ) este momentul aplicat de sursă #notat M în fig. =.>.;$. Ba fel ca însituaţia anterioară, pentru a obţine legea de mişcare adică rotaţiaθ + a masei ca funcţie de timp, estenecesară utilizarea legii constitutive a elementului %
++)
θ θ F
= ,
care, împreună cu ecuaţia anterioară, formează un sistem de două ecuaţii diferenţiale./e baza relaţiei constitutive a elementului % şi a derivatei acesteia, se poate obţine o ecuaţie de
variabila viteză unghiularăω + #notatăω în fig. =.>.;$. vem astfel(
))7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 114/145
+++ ω == f
F *
şi
+++ ω == f
F * .
5ubstituind în ecuaţia de stare, rezultă)++ M F t =+ ω γ ω .
d$ /entru sistemul hidraulic din fig. =.>.;,/ & este rezistenţa fluidică & f DNgFs m=E, iar/ I este inductanţafluidică * f DNgFm=E. 'cuaţia de stare se scrie
)++ C p
*
& p C
f
f C ∆=+ ,
unde p C + este impulsul presiunii pentru fluidul din conductă iar LC ) este presiunea furnizată de sursă #pompă#notată LC în fig. =.>.)?$. eoarece impulsul presiunii nu este o variabilă utilizată curent, se poate trevariabila debit volumetricA+ #notatA în fig. =.>.)?$ folosind legea constitutivă a elementului %
+
)+ C
f p *A =
şi derivata acesteia, care, având în vedere liniaritatea elementului, este
+
)+ C
f p
*A = ,
E2emplul 5.,.,.
@om considera acum bond&graph&ul din fig. >.+.+)c care corespunde sistemelor din figuri=.>.)7, =.>.)= şi =.>.)>, din capitolul precedent, paragraful =.>.7. cest bond&graph conţine un elemun element * în cauzalitate integrală, fapt care arată că, pe baza lui, se vor obţine două ecuaţii de stamodelează dinamica sistemului. 5istemul are o singură variabilă de intrare şi anume efortul sursei #e)$, douăvariabile de stare p+ şi J 7şi două variabile coenergetice f + şi e7. Begile constitutive ale elementelor % şi * sun
++)
p/
f I
= ,
respectiv
77)
J/
e
= .
/entru scrierea celor două ecuaţii de stare, se pleacă de la+ p şi 7J şi se scriu legile constitutive ale
joncţiunii )(?7=)+ =−−+− eee p ,
.+7= f f f =='lementul : este în cauzalitate rezistivă, prin urmare legea constitutivă este(
.== f / e &=:elaţia constitutivă a elementului % se poate scrie în funcţie de variabila de stareJ 7
+7)
p/
J I
= ,
ţinând cont că 77+ J f f == , obţinându&se astfel o primă ecuaţie de stare.*ea de a doua ecuaţie de stare se obţine din relaţia care arată că suma eforturilor pe joncţiunea
nulă, relaţie în care exprimăm eforturilee7 şi e= în funcţie de variabilele de stare p+ şi J 7, obţinând
))=

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 115/145
)+7
+ e/ p
/ / J
p I
&1
+−−= ,
unde s&a ţinut cont de faptul că ++= $)# p/ f f I == .5istemul de ecuaţii de stare este
+7)
p/
J
I
= ,
.)+7
+ e/ p
/ / J
p I
&1
+−−=
'l poate fi pus sub formă vectorial&matriceală #+.=.7$ sau #+.>.+$(
)+7
+7
)?
)
)?
e pJ
/ /
/
/ pJ
I
&
1
I +−−
= .
cest sistem de ecuaţii diferenţiale de ordinul întâi modelează comportamentul dinamic al sistefizice din figurile =.>.)+, =.>.)7, =.>.)= şi =.>.)>, el fiind obţinut din bond&graph&ul din fig. >.+.+)cacelaşi pentru toate cele patru sisteme. /arametrii elementelor capătă semnificaţii corespunzătoare ftip de sistem. Biniaritatea dinamicii permite formularea ecuaţiilor de stare în funcţiile necunoscreprezintă variabile ale puteriie7 şi f + de forma
)+
7
+
7 )?
)
)?
e/ f
e
/
/
/
/ f
e
I I
&
I
1 +−−
= .
0 astfel de exprimare se poate obţine plecând de la descrierea de stare anterioară în funnecunoscuteJ 7 şi p+ #reprezentând variabile ale energiei$ pe baza relaţiilor 77 e/ J = şi ++ f / p I = , fie pornind direct de la legile constitutive ale elementelor * si % scrise în variabilele puterii
77)
f /
e
= ,
++)
e/
f I
= ,
în care membrii drepţi se explicitează adecvat.
a$ /entru sistemul electric din fig. =.>.)+, parametrul/ & este rezistenţa electrică &e D[E, parametrul/ Ieste inductanţa bobinei * DUE iar parametrul/ este capacitatea condensatorului e D6E. 5istemul de ecuaţide stare capătă forma(
+7)
Φ *
J = ,
)+7+)
u *
&J
1 e
e+−−= Φ Φ ,
în careu) #notatăe în fig. =.>.)+$ este tensiunea la bornele sursei, iarJ 7 şi Φ + sunt cantitatea de electricitateacumulată de condensator şi respectiv fluxul magnetic acumulat de bobină.
"n baza liniarităţii se poate trece de la variabila flux magnetic la variabila intensitate a cureelectrici7 #notatăi în fig. =.>.)+$ pe baza relaţiei constitutive a elementului % şi a derivatei acesteia, ca
))>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 116/145
*
p
*iiJ +++77 ==== Φ ,
respectiv
* p
*dt di +++
== Φ .
/entru că variabilaJ 7 #cantitatea de electricitate acumulată de condensator$ nu este o variabi
utilizare în aplicaţii, se poate trece la variabilae7 #tensiunea la bornele condensatorului$ folosind relaconstitutivă specifică cazului liniar(
777)
J
uee
== .
/rin derivare, se obţine(
777)
J
uee
== .
5ubstituind în ecuaţiile de stare cele două relaţii anterioare, se obţine sistemul
+7 )
i dt du
e= ,
*u
i *
& *u
dt di e )
+7+ +−−= ,
care poate fi pusă sub forma matriceală #+.=.7$ sau #+.>.+$(
)+
7
+
7
)?
)
)?
u *i
u
*
&
*
1
dt
didt
du
ee +
−−= .
"n cazul în care este necesar să se cunoască şi alte variabile decât cele de stare, atunci se po pentru ele ecuaţii de ieşire, variabilele necunoscute numindu&se variabile de ieşire. e exemplu prezintă interes calcularea tensiuniie+
H u+ aplicată bobinei şi a tensiuniie= H u= aplicată rezistenţei, atunci din
legea constitutivă a joncţiunii ) rezultă
7=)+ eeee −−=
iar din legea constitutivă a elementului :
+7== i &J & f &e eee === .'cuaţiile ieşirii se pot scrie acum
7+)+ ei &ee e −−=
+= i &e e=
sau, sub forma vectorial&matriceală multi&ieşire #+.>.7$(
)+
7
=
+
?)
?)
ui
u
&
&
u
u
e
e + −−= .
b$ /entru sistemul mecanic cu elemente n mi#care de transla"ie din fig. =.>.)7, parametrul/ & esteconstanta de amortizare< DA sFmE, parametrul e1 / / )= unde/ e DAFmE este constanta elastică a arcului parametrul/ I este masam DNgE. 5istemul de ecuaţii de stare se scrie
+7)
pm
= ,
))<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 117/145
)+7+ ' pm
/ p e +−−= γ ,
unde 7 #notat în fig. =.>.)7$ este deplasarea forţei ' ) #deci şi a masei împreună cu extremitatea arcului şamortizorului, notată ' în fig. =.>.)7$, iar p+ este impulsul masei.
acă se doreşte ca, în locul impulsului, să se determine viteza, atunci, pe baza legii constitutelementului %, considerat liniar, se scrie
m p
/ p f
I
+++ == ,
de unde, prin derivare, rezultă
m p
f ++ = .
"nlocuind în ecuaţiile de stare ultimele două relaţii, rezultă sistemul
+7 v = ,
m '
vm -m/
v e )
+7+ +−−= γ
,care se scrie matriceal sub forma #+.=.7$ sau #+.>.+$(
)+
7
+
7 )?)?
' mv
-
mm
/ v
-e +−−= γ .
5e mai observă că viteza poate fi obţinută şi ca variabilă de ieşire, atunci când se foloseşte variantă a sistemului de ecuaţii de stare, ecuaţia de ieşire fiind chiar legea constitutivă a elementului %
*a variabile de ieşire mai pot fi alese, de exemplu,e7 H ' 7 #forţa de arc$ şie=H ' = #forţa din amortizor$
/entru a le determina, se scriu ecuaţiile constitutive ale elementelor * şi :(77 J/ e e=
++
7== f m
pJ f e γ γ γ γ ==== .
c$ /entru sistemul mecanic cu elemente n mi#care de rota"ie din fig. =.>.)=, parametrul/ & esteconstanta de amortizare t DA m sFradE, parametrul t 1 / / )= unde / t DA mFradE este constanta elasticăarcului de torsiune, iar parametrul/ I este momentul principal de inerţie F DNg m+E în raport cu axa de rotaţie5istemul de ecuaţii de stare se scrie
+7)
* F =θ ,
)+7+ M * F
/ * t t ++−= γ θ ,
undeK 7 #notat cuK în fig. =.>.)=$ este unghiul de rotaţie,J + este momentul cinetic al masei, iar M ) #notat Mîn fig. =.>.)=$ este momentul aplicat de sursă.
acă se consideră mai util să se determine variabila viteză unghiulară 7+ θ ω = în locul momentuluicinetic, atunci, dacă elementul % este liniar, se substituie, pe baza legii constitutive a elementuluderivatei acesteia
F p
f ++ = ,respectiv
))8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 118/145
F p
f ++ = ,
p+ ca funcţie de f +, rezultând sistemul
+7 ω θ = ,
F
M
F F
/ t t )+7+ +−−= ω
γ θ ω ,
care se scrie matriceal sub forma #+.=.7$ sau #+.>.+$(
)+
7
+
7 )?)?
M F F F
/ t t +−−=ω θ γ
ω θ
.
acă este necesar, pot fi scrise ecuaţii de ieşire pentru variabile care nu apar în sistemul de ecuastare, de exemplu momentule7H M 7 care acţionează asupra arcului şi momentule=H M = care acţioneazăasupra amortizorului. 5criind ecuaţiile constitutive ale elementelor * şi : se obţine sistemul de ecuaieşire
77 J/ e t = ,
++
7== f F
pJ f e t t t t γ γ γ γ ==== ,
cu forma vectorial&matriceală #+.>.7$
=+
7
=
7
?
?
ω θ
γ t t /
M
M .
d$ /entru sistemul hidraulic din fig. =.>.)>, parametrul/ este capacitatea fluidică f Dm=s+FNgE,
parametrul/ & este rezistenţa fluidică & f DNgFs m=E, iar parametrul/ I este inductanţa fluidică * f DNgFm=E.5istemul de ecuaţii de stare capătă forma
+
)7 C
f p
*D = ,
)7 ++
) C p
*
&D
1 p C
f
f
f C ∆+−−= ,
unde D 7 #notatD în fig. =.>.)>$ este volumul de fluid din vas, p C + este impulsul presiunii fluidului dinconductă iar LC ) #notată∆ C în fig. =.>.)>$ este presiunea sursei adică a pompei.
Qraţie liniarităţii, pe baza legii constitutive a elementului %
f f
C
* p
*
pAAD +
+77+ ====
şi a derivatei acesteia
f f
C
* p
*
pA +
++
== ,
se poate trece de la variabila impulsul presiunii la variabila debit volumic.acă se intenţionează exprimarea ecuaţiilor de stare în funcţie de variabila presiune în locul vari
volum, atunci se utilizează legea constitutiva a elementului *
777)
D 1
C e f
== ∆ ,
şi derivata sa))C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 119/145
77)
D 1
C f
=∆ ,
care, substituite în ecuaţiile de stare, conduc la
+7)
A1
C f
=∆ ,
f f f
f * C A
* & C
*A )+7+ ) ∆∆ +−−= ,
care se pot pune sub forma vectorial& matriceală
)+
7
+
7 )?
)
)?
C *A
C
*
&
*
A
C
f f
f
f
f ∆∆∆ +
−−= ,
adică sunt de tipul #+.=.7$ sau #+.>.+$.i în acest caz se pot scrie ecuaţii de ieşire dacă, de exemplu, se doreşte determinarea căde presiune pe conductă LC + şi a căderii de presiune pe robinet∆ C =. /entru a deduce cele două ecuaţii de
ieşire, se utilizează legea constitutivă a joncţiunii ) din care rezultă
7=)+ C C C C ∆∆∆∆ −−= ,şi legea constitutivă a elementului :
+== A & f & C f f ==∆ , putându&se scrie în final relaţiile(
7+)+ C A & C C f ∆∆∆ −−= ,
+= A & C f =∆ .5ub formă vectorial&matriceală, acestea se scriu
)+
7
=
+
?
)?
) C
A C
& &
C C
f
f ∆∆
∆
∆ + −−
= ,
adică sunt de tipul #+.>.7$.
5.,.&. Con%t"uc0!a unu! model t!p d!a#"am) +lociagrama bloc se obţine din bond&graph&ul sistemului după cum se arată în continuare, ilu
aplicării concrete bazându&se pe situaţiile discutate în 'xemplul >.7.=. 5e desenează mai întâi un graf de procesare QpreluareR a semnalelor asociat bond&graph&ului cauzal, în care fiecare bond se separă însemnale, unul pentru efort şi celalalt pentru flux, iar blocurile de procesare a semnalelor au semnificlimbajul bond&graph. 5emnalul efort este înzestrat cu o săgeată situată la capătul dinspre liniuţa c bondului, iar semnalul flux este înzestrat cu o săgeată situată la capătul opus liniuţei cauzale a boBângă linia semnalului efort se scrie literae având ca indice numărul bondului, iar lângă linia semnaluflux se scrie litera f având ca indice numărul bondului.
oncţiunile ? şi ) se reprezintă prin poligoane prin laturile cărora se conectează semnalele câte bond.
'lementele %, * şi : sunt reprezentate prin dreptunghiuri în care se scrie una din literele respectiv :, având ca indice numărul bondului.
'lementele 26 şi Q se reprezintă prin dreptunghiuri în care se scriu literele 26 respectiv Q avâdrept indice cifrele care numerotează cele două bonduri aferente.
));

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 120/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 121/145
integrare #în situaţia cauzalităţii integrale$ sau printr&o derivare, #în situaţia cauzalităţii derivativetipuri de operaţii fiind semnalate grafic în schema bloc propriu&zisă aşa cum se arată în tabelele >.).)>.).+.a$ b$ ceste operaţii de derivare şi integrare sunt însoţite, în cazul liniar, şi de o înmulţire parametru #/ I , / sau inversele lor$, operaţie de asemenea semnalată în reprezentarea simbolică din schemei bloc aşa cum se arată în tabelele >.).).a$ şi >.).+.a$. 5e observă că, pentru simplificare, se poatereprezentarea integrării #ori derivării$ şi a înmulţirii cu un parametru în acelaşi dreptunghi. acă este voperaţia de integrare, atunci este necesar să se indice printr&un semnal suplimentar condiţia iniţială.elementelor liniare de tip : aflate în cauzalitate rezistivă, ele au ca semnal de intrare un flux care, înmu parametrul elementului, conduce la un semnal de ieşire de tip efort. acă elementul liniar : este în cauzaconductivă, atunci semnalul de intrare efort este împărţit la parametrul elementului şi conduce la un semieşire de tip flux. "n tabelele >.).).a$ b$, >.).+a$ b$, şi >.).7 a$ b$, se arată modul de reprezentare gcadrul schemei bloc a acestor trei elemente în toate situaţiile posibile. "n tabelul >.).= se arată moreprezentare schematizată a surselor în diagramele bloc. "n tabelele >.).> şi >.).< se arată modreprezentare în diagramele bloc a transformatoarelor şi giratoarelor, iar în tabelele >.).8 şi >.).C moreprezentare a joncţiunilor.
"n scopul realizării unei diagrame bloc conforme cu descrierea generală prezentată în secţiune*apitolului +, în locul simbolurilor elementelor #%, *, :, 26, Q etc$, se scriu parametrii acestora #/ I , / , / &,
/ 8' , / + , etc$.e pildă, folosind elementele menţionate până acum, schema bloc preliminară din fig. #prezentată numai pentru a facilita înţelegerea modului de construire a schemei bloc propriu&ziseaspectul arătat în fig. >.7.>, care este chiar schema bloc a sistemelor ce au bond&graph&ul arătat în >.+.);.c.
e+/ & ∫ t
d
/ ?)R
4
e7
e+
e+ #?$
f 7
e)
f +
f )
4!#. 5.,.5. 5chema bloc corespunzătoare bond&graph&ului din fig. >.+.);.c
∫ t I
d / ?)R
4 e7
e+
f +#?$ f +
e)/ &
f 7
f )
4!#. 5.,.9. 5chema bloc corespunzătoare bond&graph&ului din fig. >.+.+?.c
"n mod similar, schema bloc corespunzătoare bond&graph&ului din fig. >.+.+?.c este reprezfig. >.7.<. 5emnele algebrice ale eforturilor care intră- în sumator sunt deduse din legea constitu joncţiunii )
?7+) =−− eee ,care se scrie
7)+ eee −= ,
aratând căe) capătă semnul plus iare7 semnul minus.5chema bloc corespunzătoare bond&graph&ului din>.7.7 este arătată în fig. >.7.8. 5emnele algebrice aeforturilor care intră- în sumator sunt deduse din legeconstitutivă a joncţiunii )
?7=)+ =−−+− eeee ,care se scrie
7=)+ eeee −−= .
)+)
∫ t I
d / ?) τ
R
4 e7
e+
f +#?$
f +
e)
e7 #?$
/ &
4
e=
f 7
f =
f )
∫ t
d / ?) τ
4!#. 5.,.:. 5chema bloc corespunzătoare
bond&graph&ului din fig. >.+.+).c

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 122/145
5.5. Con%t"u!"ea modelelo" +a(at) pe +ond #"ap u"! con0!nKnd cau(al!tatede"!3at!3)
"n decursul atribuirii cauzale apar adesea situaţii în care, pentru a nu încălca regulile după cface atribuirea cauzalităţii, este absolut necesar să se atribuie cauzalitate derivativă unuia sau mai elemente de tip % sau *. cest fapt are implicaţii nedorite în sensul amplificării dificultăţilor de rezosistemului de ecuaţii care descriu dinamica sistemului fizic. stfel, variabilele energiei corespunzăelementelor % şi * în cauzalitate derivativă nu sunt independente, fapt care conduce la apariţia unomatematice de tip algebric între aceste variabile şi variabilele de intrare împreună cu variabilele dcorespunzătoare elementelor % şi * aflate în cauzalitate integrală. "n final, sistemul de ecuaţii caredinamica sistemului este diferenţialo&algebric şi rezolvarea lui este, de obicei, mai dificilă.
5ă considerăm un sistem fizic care conţinen elemente care pot acumula energie #de tip % şiFsau"n cazul existenţei cauzalităţii derivative în bond&graph&ul asociat sistemului, dacă notăm c2i
R Jvectorul variabilelor de stare independente ale energiei corespunzând elementelor aflate în cauzintegrală, cu2d
R n – J vectorul variabilelor dependente ale energiei corespunzând elementelor aflacauzalitate derivativă şi cuu R m vectorul variabilelor de intrare, atunci sistemul de ecuaţii diferenţialgebric ce descrie dinamica sistemului este
,($,,,# JmJnJid iii R R R R f u22f 2 →××= − #>.>.)$
JnmJd id d
−→×= R R R f u2f 2 ($,,# . #>.>.+$5e observă că modelul la care am ajuns este de tipul #+.<.+7$ reprezentând o descriere nelin
stare în forma diferenţialo&algebrică. Mai mult chiar, vectorul variabilelor de stare2d #care joacă rol devariabile dependente în #+.<.+7$$ este deja explicitat în raport cu2i #care reprezintă variabileleindependente$ şi mărimile de intrare, adică2d este tocmai de forma #+.<.+=$.
5e remarcă faptul că în ecuaţiile diferenţiale apar derivatele variabilelor dependente în timp ce înecuaţiile algebrice aceleaşi variabile apar nederivate. /entru a intra în posesia unei reprezentări de
explicite, se derivează în raport cu timpul ecuaţiile algebrice, ele căpătând forma,(Z
$,,,,#Z JnmmJJ
d iid d −→×××= R R R R R f uu22f 2 #>.>.7$
care coincide cu exprimarea #+.<.+>$. 5e înlocuiesc apoi derivateled 2 în sistemul de ecuaţii diferenţiale destare rezultând #conform metodei prezentate în paragraful +.<.7$
JmmJJiiiii R R R R R f uu22f 2 →×××= (j$,,,,#j . #>.>.=$
acă este posibilă rezolvarea algebrică a acestui sistem în raport cu Ji R 2 , atunci el se aduce la
forma explicităJmmJ
iiii R R R R f uu2f 2 →××= (Z
$,,,#Z , #>.>.>$
care coincide cu exprimarea #+.<.+8$0 altă cale de rezolvare, ce poate fi uneori convenabilă mai ales atunci când este nevoie de info
şi despre variabilele2d , constă în aducerea la forma explicită a sistemului de ecuaţii
,($,,,# JmJnJid iii R R R R f u22f 2 →××= − #>.>.<$
JnmmJJd @ @iid d
−→×××= R R R R R f uu22f 2 (Z
$,,,,#Z
) , #>.>.8$
care, rezolvat algebric în raport cu [ ] n8 8 d
8 i R 222 = , conduce la sistemul de ecuaţii diferenţiale
nmmn
d
i
R R R R f 2
2
2uu2f 2 →××== (Z
,$,,,#Z
, #>.>.C$
ce este tocmai de forma #+.<.+;$ comentată în paragraful +.<.7.
)++

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 123/145
3n alt aspect negativ al existenţei cauzalităţii derivative constă în faptul că poate conduce la apunor probleme în cadrul simulării pe baza schemei bloc datorită blocurilor de derivare numerică cfoarte multe cazuri, introduc erori majore. /entru aceste situaţii există posibilitatea de a ameliora rezuaşa după cum se va arăta în *apitolul C, 'xemplul C.=.+. în contextul utilizării schemelor bloc psimulare în mediul M 2B ^&5%M3B%AK.
E2emplul 5.5.1.5e consideră sistemul mecanic din fig. >.>.). compus dintr&un reductor cu o treaptă care ar
coaxial cu arborele de intrare un cilindru având momentul de inerţie F a în raport cu axa principală centralăde inerţie notată #a$ care coincide cu axa de rotaţie şi, dasemenea, are prins coaxial cu arborele de ieşire un alt cilindavând momentul de inerţie F b în raport cu axa principală centralăde inerţie notată #b$ care coincide cu axa de rotaţie.
5e consideră că există pierderi prin frecare în cele două lag proporţionale cu vitezele de rotaţieω a şi ω b ale celor doiarbori, coeficienţii de proporţionalitate fiindγ a şi respectivγ b.:azele celor două roţi ale reductorului suntr a şi r b. 5istemul este
acţionat de un cuplu motor M m H M #t $.cest sistem este asemănător cu cel din fig. >.=.+C, #'xempl>.=.=$ singura deosebire constând în adăugarea element
inerţial având momentul de inerţie F a. ceastă observaţie conduce la concluzia că bond&graph&ulacauzal, reprezentat în fig. >.>.+, va conţine în plus faţă de bond&graph&ul acauzal din fig. >element inerţial %, având parametrul/ I H F a, conectat la joncţiunea ) corespunzătoare vitezei unghiulareω a.
tribuirea cauzală începe de la sursa de efort 5e şi, pentru a continua, este necesar să considerămelementul % având parametrul F a în cauzalitate integrală. cestfapt determină inducerea cauzalităţii pe toate celelalte bondrezultând bond&graph&ul cauzal din fig. >.>.7. 'lementul ine
% având parametrul F b capătă, în mod automat, cauzalitatederivativă. "ntrucât există un unic element % în cauzalintegrală, înseamnă că vom avea o singură ecuaţie de stare d pentru că există şi un element % în cauzalitate derivată, va exista şi o ecuaţie algebrică.@ariabila $#) t M M e m == este unica variabilă de intrare iarvariabila p+ este unica variabilă de stare. atorită liniarităţii se poate alege ca variabilă de stare viteza unghiula
8$# f t b == ω ω în locul lui p+. 'cuaţia constitutivă aelementului %+ în cauzalitate integrală este(
a F p f +
+ = .
'cuaţiile constitutive ale joncţiunilor sunt?$# =+7 =−−− e pet M ,
+=7) f f f f === , pentru
<> −ee
,
><8 f f f == .'cuaţiile constitutive ale transformatorului sunt
)+7
#a$
#b$
# a $
r b
r a
# b$# F b$ M m H M #t $
# a $# F a $
# a $
4!#. 5.5.1. 5istem mecanic al cărui bond&graph conţine cauzalitate derivativă
5 e ) a
) b
a
br r −
:( a
26. .
:( b
% ( F b% ( F a
4!#. 5.5.&. ^ond&graph&ul acauzal alsistemului din fig. >.>.).
5 e )a
)b
a
br r −
:( a
26. .
:( b
% ( F b
)7
+
>=<
% ( F a
8
4!#. 5.5.,. ^ond&graph&ul cauzal alsistemului din fig. >.>.) cu %+ în
cauzalitate integrală şi %8 în cauzalitate

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 124/145
=> f r r
f b
a−= ,
>= er r
eb
a−= ,
iar ale elementelor : sunt
77 f e aγ
= ,<< f e bγ = .
0 primă formă a ecuaţiei de stare este
( )
.$#
$#$#
$#$#$#$#
8+
+
8++
8<+
8<+>7=7+
pr
r
F
p
r
r t M
p F
p
r
r
r
r
F
pt M p f
r
r
F
pt M
eer
r f t M e
r
r f t M eet M p
b
a
ab
b
aa
ab
ab
b
a
aab
b
a
aa
b
aa
b
aa
+
+−=
=+
−+−=++−=
=++−=+−=−−=
γ γ
γ γ γ γ
γ γ
@ariabila p8 trebuie exprimată în funcţie de variabila de stare p+, fapt care se realizează pe baza relaţieconstitutive
88 f F p b= .6olosind celelalte relaţii constitutive pentru a exprima variabila f 8 în funcţie de variabila de stare p+,
se obţine
+=8 p
r
r
F
F f
r
r F p
b
a
a
b
b
ab
−=
−= ,
adică ecuaţia algebrică care, prin derivare, permite eliminarea din ecuaţia de stare a derivatei8 p . :ezultă
+8 pr r
F F
pb
a
a
b
−= ,
ceea ce conduce, după efectuarea substituţiei, la următoarea formă finală a ecuaţiei de stare
$#)
) +
+
+
+
t M pr r
F p
r r
F F
bb
aa
ab
a
a
b =
++
+ γ γ .
ceastă ecuaţie poate fi scrisă şi în variabila $#$#8 t t f b ω ω == , caz în care capătă forma
$#$#$# t M t r r
r r
t F r r
F r r
b
ab
a
bab
b
aa
a
b −=
++
+ ω γ γ ω .
3n aspect demn de remarcat este faptul că, la fel de bine, poate atribui cauzalitate integrală elementului %8 având parametrul F b, ceea ce induce cauzalitate derivativă elementului+
având parametrul F a.^ond&graph&ul cauzal ce se obţine în aceste condiţii
reprezentat în fig. >.>.=. 5e poate verifica cu uşurinţă că ecude stare în variabila p8 conduce la aceeaşi ecuaţie diferenţială îvariabila $#t ω ca şi în cazul iniţial, ceea ce arată că, aşa cum ede aşteptat, alegerea elementelor cărora li se atribuie cauzalit
)+=
5 e )a
) b
a
br r −
:( a
26. .
:( b
% ( F b
)7
+
>=<
% ( F a
8
4!#. 5.5.*. ^ond&graph&ul cauzal alsistemului din fig. >.>.) cu %+ în
cauzalitate derivată şi %8 în cauzalitate

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 125/145
integrală nu influenţează forma ecuaţiilor dinamicii sistemului scrise pentru aceeaşi variabilă.5chema bloc obţinută pe baza bond&graph&ului din fig. >.>.7 este reprezentată în fig. >.>.>.5chema bloc corespunzătoare bond&graph&ului din fig. >.>.= diferă de cea din fig. >.>.> dar
transfer este aceeaşi #verificarea acestei afirmaţii este lăsată pe seama cititorului$.
a
b
ar r −e=
e+
e) H M #t $intrare
f + f 7
f =
f +#?$
e>
–
∫ t a
d F ?
)
–
b
ar r −
f >
e8
b<dt d
F b
f 8 f <
ieşire
#t $
e7 e<
4!#. 5.5.5. 5chema bloc corespunzătoare bond&graph&ului din fig. >.>.7.acă se acţionează cu un cuplu motor constant M s, atunci apare un răspuns staţionar în cadrul căru
viteza unghiulară; b este constantă şi are valoarea
b
ab
a
ba
s s
r r
r r M
γ γ ω
+−=
.
E2emplul 5.5.&.5e consideră o pârghie de gradul întâi având braţele de lungi
a şi respectivb, situată într&un plan vertical şi având prinse la capmaselema şi mb #fig. >.>.<$, care se roteşte cu un unghi mic. supcapătului având prinsă masama acţionează o forţă ' #t $, iar de capătulavând prinsă masamb ( este fixată extremitatea unui arc elastic liniaavând constanta elastică/ e.
^ond&graph&ul acestui sistem va conţine două joncţiuncorespunzătoare vitezelorva şi vb ale celor două mase, legate printr&un transformator având param
ba/ 8' = . 6orţa ' #t $ şi greutăţile maselor sunt reprezentate prin surse de efort, cu precizarea că corespunzătoare forţei de greutate a maseimb va fi una care absoarbe putere deoarece această greutate edeplasată în sens opus acţiunii gravitaţiei ceea ce conduce la consum de putere. Masele sunt reprez prin elemente % legate de joncţiunile ) corespunzătoare vitezelor lor, iar arcul este reprezentat pelement * legat de joncţiunea ) corespunzătoare vitezeivb. "n fig. >.>.8 este reprezentat bond&graphacauzal al acestui sistem.
/entru atribuirea cauzalităţii, se aplică mai întâi liniuţa cauzală pe bondurile surselor, după catribuie cauzalitate integrală elementului %< sau %+. 5e alege %< pentru că, de regulă, interesează ce se întâmpla capătul pârghiei opus celui în care acţionează forţa. @ariabila de stare va fi p<. upă această operaţie,cauzalitatea se induce pe toate bondurile, rezultând elementul *C în cauzalitate integrală. cest faptînseamnă că sistemul de ecuaţii de stare va conţine două ecuaţii în variabilele p< şi J C dar care conţin şivariabila p+, precum şi o ecuaţie algebrică de legătură între p+ şi una sau ambele variabile p< şi J C. ^ond&graph&ul cauzal este reprezentat în fig. >.>.C.
)+>
mba b
' #t $
ma
/ e
4!#. 5.5.9. 5istem mecanic cu pârghieîn care a are cauzalitate derivativă

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 126/145
e/ )(*
ma g ( 5 e )va
)
%(ma
26..
ba
5 e ( mb g )vb
%(mb
5 e ( ' #t $
+
7
= ><
C
8
4!#. 5.5.:. ^ond&graph&ul acauzal al sistemului din fig. >.>.<.
ma g ( 5 e )va
)
%(ma
26..
ba
5 e ( mb g )vb
%(mb
5 e ( ' #t $
+
7
= ><
C
8
e/ )(*
4!#. 5.5.;. ^ond&graph&ul cauzal al sistemului din fig. >.>.<./entru scrierea ecuaţiilor de stare, se stabilesc mai întâi mărimile de tip cauză, care
g me g me ba == 8) , cu valori constante în timp şi $#7 t ' e = care poate depinde de timp. @ariabilele dstare sunt p< şi J C. 'cuaţiile constitutive ale elementelor %+, %< şi *C sunt respectiv
,++ f m p a=
,<<
bm
p f =
.CC J/ e e=
'cuaţiile constitutive ale joncţiunilor sunt,?$#=+ =+−− t ' e p g ma
,=7+) f f f f ===şi
,?C<> =−−− e g m pe b
,<8C> f f J f ===
iar ale transformatorului sunt,=> e
ba
e =
.>= f ba
f =
'cuaţiile de stare se scriu, într&o primă formă, astfel
,C=C>< g mJ/ eba
g mee p beb −−=−−=
,<<C
bm p f J ==
care, după substituirea luie=,capătă forma
)+<

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 127/145
( ) g mJ/ t ' p g mba
p bea −−+−= C+< $## ,
.<C
bm p
J =
cum trebuie scrisă relaţia algebrică de legătură între variabilele C< , J p şi + p . 'a se obţine plecândde la ecuaţia constitutivă a elementului+% , rezultând
baaaaa m
p
ba
m f ba
m f ba
m f m f m p <<>=++ ===== ,
adică o relaţie care leagă variabila+ p de variabila de stare < p . /rin derivare se obţine(
<+ pba
mm
pb
a = .
upă efectuarea substituţiei în ecuaţiile de stare, acestea capătă forma finală
( ) g mt ' Jm
b
aJ/
m
m
b
a p bae
b
a −++−=
+ $#) C
+
< ,
bm p
J <C = .
cest sistem de două ecuaţii diferenţiale se poate scrie cu uşurinţă înlocuind variabila p< cu variabila<< v f = pe baza derivării relaţiei constitutive a elementului %<
,<<< vm f m p bb ==
iar, după efectuarea substituirilor, se obţine
( ) g mt ' g m
b
aJ/ m
b
amv baeab −++−=
+ $#C
+
< ,
.<C vJ =acă se urmăreşte utilizarea forţei din arc ' C
H eC drept variabilă de stare, se derivează relaţiconstitutivă a elementului *C
CC J/ ' e=
şi după înlocuiri, sistemul de ecuaţii diferenţiale rezultă de forma(
( ) ,$#C
+
< g mt ' g mba
' mba
mv baab −++−=
+
.<C v/ ' e=5chema bloc a sistemului este reprezentata în fig.>.>.;, considerând drept variabilă de ieşire
vb#t $.
)+8

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 128/145
ba
dt d
ma ∫ t b
d m ?)
e=
e+
f C
' #t $intrare
mb g
f +
f = f >
f <#?$
v b#t $
R
mag
e>
ba
v< N f <
∫ t e d / ?
eC#?$
eC H ' C
4 R 4
4 R
e<
ieşire
4!#.5.5.<. 5chema bloc obţinută pe baza bond&graph&ului din fig.>.>.C.Matriceal, sistemul de ecuaţii de stare #sau intrare&stare$ se scrie de forma #+.=.7$
( )( ) −+
+
++−= gmt ' gm
ba
mbam
'v
/
mbam
'v ba
abe
ab +C
<
+
C
< )?
)
?
)?
.
@alorile proprii sunt date de rădăcinile ecuaţiei caracteristice
?+
+ =
+
+ab
e
mbam
/ s
,
care sunt pur imaginare. "n consecinţă, prin aplicarea unei forţe constante ' #t $ H ' s drept mărime de intrare,sistemul nu va evolua către un regim staţionar caracterizat prin valori constante ale variabilelor de s
)+C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 129/145
va oscila perpetuu cu aceeaşi amplitudine. /recizăm că, în cazul unui sistem fizic real, întotdeauna vao disipare de putere #preponderent prin frecare$ care va avea drept efect amortizarea oscilaţiilor, astse va instala un regim staţionar #după traversarea unui regim tranzitoriu$.
E2emplul 5.5.,.
5e consideră sistemul din fig. >.>.)? care conţine o parte hidraulică şi o parte mecanică. /
hidraulică este compusă dintr&o sursă de presiune de mărime $#) t p p =∆ care, printr&o conductă lungăacţionează asupra unui piston situat într&un cilindru hidraulic în care se generează o presiune $#+ t p p c=∆ ./artea mecanică este situată de cealaltă parte a pistonului şi se compune dintr&un arc de compresiunîntre piston şi capacul cilindrului hidraulic şi dintr&o masă de mărimem situată în afara cilindrului ce este prinsă de tija pistonului. supra masei acţionează o forţă ' #t $ care se opune deplasării datorate presiundin cilindru. *onducta are o rezistenţă hidraulică de valoarea &h şi o inductanţă de valoare * h.
m
v
' #t $ p#t $
A pc#t $
/ e
4!#. 5.5.1=. 5istem combinat mecanic si hidraulic"ntre masa de valoarem şi suprafaţa de sprijin se consideră că există o forţă de frecare proporţio
cu viteza, coeficientul de proporţionalitate fiindγ . rcul este considerat liniar, constanta de elasticitatfiind/ e.
^ond&graph&ul nesimplificat al părţii hidraulice este prezentat în fig. >.>.)), în care s&a cocâte o joncţiune zero pentru presiunea absolută a pompei # p )$, pentru presiunea absolută din cilindru # p+$ şi pentru presiunea de referinţă p? #presiunea atmosferică$. *ilindrul s&a modelat ca o sursă de efort ce abs putere, iar pompa ca o sursă de efort care furnizează putere.
upă simplificare, bond&graph&ul părţii hidraulice este cel reprezentat în fig. >.>.)+.
) ??
:( &h
p+ p )
)
?
))
5 e( pc
p?
p#t $( 5e %( * h
)
:( &h
5 e( pc p#t $( 5e
%( * h
4!#. 5.5.11. ^ond&graph&ul nesimplificat al părţii hidraulice din sistemul reprezentat în
fig. >.>.)?
4!#. 5.5.1&. ^ond&graph&ul simplificat al părţii hidraulice din sistemul reprezentat în
fig. >.>.)?.^ond&graph&ul părţii mecanice este desenat în fig. >.>.)7, el conţinând o joncţiune ) pentru
comună a pistonului şi a maseim. 6orţa ' p ce apasă asupra pistonului datorită existenţei presiunii în cilineste modelată ca o sursă de efort care furnizează putere, iar forţa ' ce se opune deplasării masei de mărimem
este modelată ca o sursă de efort ce absoarbe putere.inând cont că dacă notăm cu : mărimea ariei pistonului, cuv
viteza acestuia şi cuA debitul fluidului din piston, putem scri
relaţiile : p ' c p =şi
v:A = ,)+;
)
e/ )
(*
:( ' p#t $( 5e
%(m
5 e( '
4!#. 5.5.1,. ^ond&graph&ul părţii mecanicedin sistemul reprezentat în fig. >.>.)?.

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 130/145
atunci putem face legătura între bond&graph&ul părţii hidraulice şi cel al părţii mecanice transformator de parametru :/ 8' = . "n fig. >.>.)= este desenat bond&graph&ul cauzal al sistereprezentat în fig. >.>.)?. 5e remarcă faptul că, după atribuirea cauzală a surselor, s&a trecut la atrcauzalităţii integrale elementului %C ceea ce a condus la propagarea cauzalităţii pe toate bond&urileelementul %7 a rezultat în cauzalitate derivativă. 5istemul de ecuaţii va fi deci compus din două ecuaţiidiferenţiale în variabilele pC, J < şi p7, precum şi dintr&o ecuaţie algebrică ce va exprima legătura dvariabila p7 şi cele două variabile de stare pC şi J <.
'cuaţiile constitutive ale elementelor % şi * sunt
m p
f CC = ,
77 f * p h= ,
<< J/ e e= ,ale elementelor : sunt
++ f &e h= ,
88 f e γ = ,iar ale joncţiunilor ) sunt
?$# 7=+ =−−− peet p ,
=7+) f f f f === ,respectiv
?$#C8<> =−−−− t ' peee ,
C;8<> f f f J f ==== .'cuaţiile constitutive ale transformatorului sunt
=> :ee = ,>= :f f = .
'cuaţiile de stare se scriu într&o prima formă astfel[ ] $#$# <<7+8<>C t ' JJ/ : pet p ' eee p e −−−−−=−−−= γ ,
C<)
pm
J = ,
iar ecuaţia algebrică este
CC>=77 ) pm
: * :f * :f * f * f * p hhhhh ===== .
erivând ecuaţia algebrică şi făcând substituţiile corespunzătoare, se ajunge la următoarea ffinală a ecuaţiilor de stare(
$#$#) <C
++
C t ' :t pJ/ pmm
& : :
m *
p ehh −+−
+−=
+ γ ,
C<)
pm
J = .
ceste ecuaţii pot fi exprimate şi în funcţie de variabilele CC f v =
şi ' <
H
e<, rezultând de forma( ) ( ) $#$#<C++
C t ' :t p ' v & : : *mv hh −+−+−=+ γ ,
C< v/ ' e= .
)7?
). .26 p#t $( 5e
%( * h
)
e/ )
(*
:(
%(m5 e( '
:( &h
)+
7
= ><
8
C ;
4!#. 5.5.1*. ^ond&graph&ul cauzal al sistemuluidin fig. >.>.)?.

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 131/145
esemnând drept variabilă de ieşire vitezav H vC a maseim, vom obţine o reprezentare intrare&starieşire de forma #+.>.+$, #+.>.7$ cu următoarea scriere matriceal&vectorială(
+−
+−++
−+
+−=$#
$#
??
)
?
)++
<
C++
+
<
C
t '
t p : *m : *m
:
'
v
/ : *m : *m
& :
'
vhh
ehh
h γ ,
[ ] =<
C?) ' v
v .
5chema bloc a sistemului din fig. >.>.)? este reprezentată în fig. >.>.)>. acă la intrarea sistemuaplică mărimi constante p s şi ' s, atunci va apărea un răspuns staţionar caracterizat prin
?C == svv s
şi s s ' : p '
s −=< .
/e parcursul regimului tranzitoriu, până la instalarea regimului staţionar, în sistem pot apărea osdacă şi numai dacă autovalorile date de polinomul caracteristic
?++
++ =
++
+++
: *m
/ s
: *m
& : s
h
e
h
h γ
au partea imaginară nenulă.
intrare
dt
d *
h ∫ t
d em ? C
)
f =
e+
' #t $ p#t $intrare
e7
e= e>
e< H ' <
v
R
f <
eC
f C#?$
f >
4
R 4
e8
ieşire
&h
: 4
<
f 7 f +
:
f C H vC f 8
4 4
∫ t e d / ?
J <
J <#?$
4!#. 5.5.15.5chema bloc a sistemului din fig. >.>.)?.Merită remarcat faptul că, dacă se neglijează comportarea de tip inerţial a fluidului din con
atunci bondul etichetat cu numărul 7 în fig. >.>.)= dispare şi în bond&graph&ul rezultat, atribuirea cnu mai conduce la elemente în cauzalitate derivativă. e asemenea atragem atenţia că atribuirea cauzîn bond&graph&ul din fig. >.>.)= nu este unică, oricare din cele două elemente inerţiale putâcauzalitate derivativă #adică bondul 7 poate avea cauzalitate integrală şi bondul C cauzalitate derivase vedea şi discuţia aferentă aceleiaşi problematici din exemplul >.>.).
9.1. Elemente cont"olate 6modulate7 'n l!m+a>ul +ond #"ap
*apacitatea mare de modelare a limbajului bond4graph se datorează faptului că el operează înmod sistematic cu perechi de semnalee şi f , organizate grafic #prin intermediul bond&urilor$ în conformit
transferul puterii între componentele fizice ale sistemului. /rin utilizarea unor aşa&numite elemcontrolate-, un bond4graph acceptă şi prezenţa semnalelor în formă individuală #adică nu perechi$construcţia modelului poate ţine cont şi de semnalele carenu participă la formularea bilan"urilor de putere ,dar care posedă informa"ii fundamentale despre funcţionarea sistemului. *u ajutorul acestor semn
)7)

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 132/145
parametrii uniporturilor şi diporturilor pot fimodifica"i pe parcursul funcţionării, adicăelementele bond&graph&ului sunt controlate . /entru elementele controlate se mai foloseşte şi termenul deelemente modulate .ceastă problematică este tratată şi în #:osenberg and Karnopp, );C7$, #Karnoppet al ., );;?$, lucrări caresunt recomandate cititorului interesat în a cunoaşte şi alte modalităţi de prezentare.
"n majoritatea cazurilor, prezenţa elementelor controlate într&un bond&graph conduce la apatermeni neliniari în descrierea matematică a funcţionării sistemului.
9.1.1. Bond u"! act!3e"n modelarea unui număr mare de procese fizico&tehnice se întâlnesc semnale care conţininforma"iideosebit de utile pentru descrierea dinamicii, dar care pot finegli@ate din punctul de vedere albilan"ului
energetic . stfel de semnale pot fi incluse în reprezentările de ti bond&graph, prin utilizarea aşa numitelor bond-uri active -,simbolizate grafic, conform fig. <.).) prin arce cu săge"i complete , pecare se marchează semnalul respectiv.
"n particular, semnalulθ #t $ poate fi un efort sau un flux generat într&o anumită parte a sistemului modelat #unde put
aferentă luiθ #t $ nu este neglijată$ şi utilizat numai sub raportinforma"ional într&o altă parte a sistemulu
#unde puterea aferentă luiθ #t $ este neglijată$. e asemenea semnalulθ
#t $ poate fi o func"ie de un semnalefortei#t $ sau flux f i#t $, adicăθ #t $ H #ei#t $$ sauθ #t $ H # f i#t $$$ generat într&o anumită parte a sistemmodelat, unde puterea aferentă luiei#t $ sau f i#t $ nu este neglijată.
2rebuie, de asemenea, avut în vedere şi cazul general prezenîn fig. <.).+, unde semnalulθ #t $ de putere neglijabilă rezultă dintr&semnalη #t $ de putere neglijabilă, în urma transferului printr&un sik, static #descris prin ecuaţii algebrice$ sau dinamic #descris prin ediferenţiale$, liniar sau neliniar. "n această situaţie, atâtη #t $ cât şiθ #t $sunt asociate, în simbolizarea grafică, unor bonduri active. nalog cediscutate anterior,η #t $ poate fi un efort sau un flux generat într
anumită parte a sistemului studiat, unde puterea luiη #t $ nu este neglijată. 5emnalulθ
#t $ rezultă prinaplicarea unui operatorG semnaluluiη #t $, adicăθ #t $ HG #η #t $$.^ond&urile active sunt utilizate în modelarea funcţionării unor elemente controlate, problemă
ne vom ocupa în detaliu pe parcursul paragrafelor următoare.
9.1.&. Elemente un!po"t cont"olate9.1.&.1. Elemente !ne"0!ale cont"olate"n fig.<.).7 se prezintă bond&graph&ul acauzal al unuiuniport iner"ial #%$ care este controlat d
semnalul θ #t $ corespunzător bond&ului activ #puterea aferentă luiθ #t $ fiind neglijată$. /arametruluniportului/ MI se modifică în timp ca funcţie de valoarea semnalul
θ
#t $, adică($$##$# t t / I MI θ = , #<.).)$
unde I este o funcţie reală care, prin compunere cu semnalulθ #t $,conduce la dependenţa de timp a parametrului/ MI .3nui astfel de uniport i se poate asigna cauzalitate integrală sderivativă, analog cazului când uniportul nu este controlat.
/entru uniporturile inerţiale controlate se mai utilizeatermenul deuniporturi iner"iale modulate .
9.1.&.&. Elemente capac!t!3e cont"olate
"n fig. <.).=. se prezintă bond&graph&ul acauzal al unuiuniportcapacitiv #*$ care este controlat de semnalulθ #t $ corespunzător bond&ului activ #puterea luiθ #t $ fiind neglijată$. /arametrul uniportului #/ M $se modifică în timp ca funcţie de valoarea semnaluluiθ #t $, adică(
)7+
θ
4!#. 9.1.1. 5imbolizarea grafică aunui bond activ, corespunzător
θ #t $ HG #η #t $$Ση
4!#. 9.1.&. 5imbolizarea grafică adouă bond&uri active,
corespunzătoare semnalelorθ #t $ şit θ t rezultă din transferul lui
e f
% ( / MI
4!#.9.1.,. ^ond&graph&ul acauzal alunui uniport inerţial controlat de
semnalulθ
f
e * ( / M
4!#. 9.1.*. ond&graph&ul acauzalal unui uniport capacitiv controlat

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 133/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 134/145
transformatorului este modulat de semnalulθ . "n multe texte, apare şi notaţia distinctă M26 în loc de 2 pentru a sublinia faptul că transformatorul în cauză este modulat.
9.1.,.&. !"atoa"e cont"olate"n fig. <.).;. se prezintă bond&graph&ul acauzal al unui girator #Q $ care este controlat de s
θ #t $ corespunzător bondului activθ #puterea luiθ #t $ fiind neglijată$. /arametrul giratorului se modifiîn timp ca funcţie de valoarea semnaluluiθ #t $, adică(
$$##$# t t / .+ M.+ θ = , #<.).8$unde + este o funcţie reală care, prin compunere cu semnalulθ #t $,conduce la dependenţa de timp a parametrului/ M + .
*auzalitatea pentru giratorul controlat poate fi asignată oricare din cele două moduri care au fost discutate pentru cazul cgiratorul nu este controlat.
/entru giratoarele controlate se mai utilizează termenul giratoare modulate , spunându&se că parametrul giratorului este modulat de semnalulθ . "n unele texte, apareşi notaţia distinctă MQ în loc de Q , pentru a sublinia faptul că giratorul în cauză este modulat.
9.1.*. E2emple/entru a ilustra modul în care sunt abordate în limbajul bond&graph elementele controlate, seîn continuare câteva exemple de sisteme care conţin astfel de elemente.
E2emplul 9.1.1.5e consideră sistemul hidraulic presupus ca având curgere laminară din fig. <.).)?. format din
rezervor cu capacitatea hidraulică h alimentat cu fluid printr&un robinet având rezistenţa hidraulică &h) decătre o pompă care realizează presiunea p#t $. @aloarea rezistenţei hidraulice &h) se modifică în funcţie devaloarea presiunii hidraulice ph de la baza rezervorului conform relaţiei $#) h &h p & = . in rezervor fluidul poate fi evacuat printr&un robinet care are rezistenţa hidraulică &h+. "n construcţia modelului, vom considerdrept mărime de intrare presiunea p#t $ drept mărime de ieşire debitul de alimentareA#t $.
p?R p#t $A#t $
p?
p?
# &h+$
p?R ph#t $ #1 h$ p#t $ & intrareA#t $ & ieşire
S &
# &h) $ ) ?5 e *( 1 h
:( &h
)
+
7=
>
:( &h
&# p ! $
4!#. 9.1.1=. 5istem hidraulic al cărui bond&graph conţine un element controlat
4!#. 9.1.11. ^ond&graph&ul sistemuluihidraulic reprezentat în fig. <.).)?.
^ond&graph&ul cauzal al sistemului este reprezentat în fig. <.).)). 'lementul : + este un elementrezistiv controlat deoarece parametrul său &h) se modifică în timp ca funcţie de presiunea de la barezervorului, notată p> după modul de numerotare al bondurilor, astfel că relaţia ce defineşte paramrezistorului se scrie
== >>)
)$# J
p &
h & &h ,
unde & este o funcţie reală. "n bond&graph, acest fapt este evidenţiat grafic printr&un bond activ sacare preia din joncţiunea ? numai efortul impus de bondul > tuturor celorlalte bonduri ale joncţiufurnizează elementului : + pentru a putea interveni asupra parametrul &h) al acestuia. cest bond activ nu estenumerotat şi nu intervine în bilanţul de putere al joncţiunii ?.
)7=
Q f )
e+e)/ M.+
f +
4!#. 9.1.<. ^ond&graph&ul acauzal alunui irator controlat de semnalul

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 135/145
eoarece numai elementul *> este în cauzalitate integrală, vom avea o singură ecuaţie diferenţialstare în variabilaJ >
H D > care reprezintă volumul din rezervor.:elaţiile constitutive ale elementelor *>, : +, : = şi relaţiile constitutive ale celor două joncţiuni sunt
>>)
D
eh
= ,
+)+
)e
& f
h=
,
=+
=)
e &
f h
= ,
?$# 7+ =−− eet p ,
+7) f f f == ,?>=7 =−− D f f ,
>=7 eee == .
^ondul activ pe care circulă semnalul p> către elementul : + nu apare în relaţiile constitutive ale joncţiunii ?, el având numai rolul de a evidenţia dependenţa unui parametru de un semnal şi nu are imîn transferul de putere între elementele bond&graph&ului.
'cuaţia de stare se scrie într&o primă formă
+
>>
>+
=7
)+
=
)
+=7> $$##
)$$##
)
h
h &
hhhh &
eet p
1
D &e
et p & &
e &e
f f D −−
=−−=−=−= ,
care, în final, devine
$#))$#
)>
>+>
> t p
D
D & p
D
h &
hh &h
+ +−=
.
"ntrucât elementul acumulator de energie are comportare liniară, ecuaţia diferenţială #de starefi formulată şi în variabila p>. stfel, pe baza relaţiei constitutive a elementului *> cât şi a derivatei acesteia(
>>)
D
eh
=
se poate scrie următoarea ecuaţie în variabilae>H p>(
$#$#
))$#
)>
>>
>+
t p p
p & p
p &hhh &h
+
+−= .
@ariabila de ieşire $#$# ++ t A f t A == se scrie într&o primă formă
+)
7++
$#$#
hh &et p
&e
t A −== ,
care ulterior se poate exprima atât în funcţie de p>(
( )>>
+ $#$#
)$# pt p
pt A
&−=
,
cât şi în funcţie deD >(
)7>

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 136/145
−
= >>
+)
$#)
$# D
t p
D
t Ah
h &
.
5chema bloc a sistemului hidraulic dedusă pe baza bond&graph&ului din fig <.).)). este repreîn fig. <.).)+. 5emnalul necesar calculării parametrului)h & #aferent elementului bond&graph : +$ este
introdus într&un bloc de calcul neliniar #marcat, conform convenţiei din secţiunea +.8 a *apitolululinie de contur dublă$. ^locul de calcul furnizează semnalul $#
)
> p & care este dirijat într&un alt blo
neliniar ce realizează operaţia de înmulţire cu semnalule+#t $, rezultând astfel semnalul f +#t $.
$#
)
> p & ∫ t
hd
?)
+
)
h &
e=
e>
]
e7
e+
f > f =
f 7 f +
>#?$
A#t $
p#t $R
R
ieşire
intrare p>Ne7
4!#. 9.1.1&. 5chema bloc a sistemului hidraulic reprezentat în fig.<.).)?.
E2emplul 9.1.&.5e consideră un pendul format dintr&o tijă de masă neglijabilă de lungimel care, în capătul 0, este
prinsă de o articulaţie cilindrică fixă în care există frecare vâscoasă proporţională cu viteza de coeficientul de proporţionalitate fiindγ . Ba capătul celălalt al tijei este fixată o masă de mărimem #fig.
<.).)7.$.5e roteşte pendulul astfel încât tija să facă cu verticala un unghiSo,după care acesta este lăsat liber sub acţiunea forţei de greutate a masei. frecarea nu este mare, atunci vor fi executate oscilaţii în jurul pozverticale până la oprire.
nalizând fenomenul fizic, putem considera că avem de a face cu corp aflat în mişcare de rotaţie în jurul unei axe orizontale realizată datmomentului forţei de greutate, fapt care conduce la apariţia unei viunghiulare.
2rebuie găsită deci o legătură între forţa de greutate şi momentucare este
sinmgl M −= ,unde M este momentul forţei în raport cu punctul 0. 5emnul minus arată
sensul acestui moment este opus sensului pozitiv al axei 0 z #nefigurată pe desen$ cu care este colinivectorul moment. ceastă relaţie sugerează necesitatea introducerii în bond&graph&ul sistemulutransformator modulat, având parametrul/ M26 de valoare 4 sinl sau 4 sin) l #în funcţie decauzalitate$, care să lege o forţă şi viteza ei de deplasare pe direcţie coliniară cu ea de momentul şunghiulară pe care le generează #transformatorul modelează un transformator de putere$. ^ond&cauzal al sistemului este cel din fig. <.).)=. 6orţa de greutate este modelată ca o sursă de efort. 5iviteză din sistem este viteza unghiulară, pentru care s&a considerat o joncţiune ) de care suntelementul inerţial % având ca parametru momentul de inerţie F al masei în raport cu axa de rotaţie 0 z demărimeml + şi elementul rezistiv : având parametrulγ . 2ransformatorul fiind modulat este notat M26 ia parametrul acestuia se calculează pe baza unui semnalS ce se obţine prin integrarea semnalului ω = provenind din joncţiunea ), fapt evidenţiat grafic în bond&graph.
)7<
#m$
-
%0
#l $
g m
v
ω
4!#. 9.1.1,. 5istem mecanical cărui bond&graph conţinetransformatoare modulate

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 137/145

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 138/145
f 7
sinl − ∫ t d ml ?+
)∫ t d ?
e=
e7
mg e+
#t $
f = f +
#t $ f 7#?$ H
ω #?$ H?
f 1Nv
R
]
#?$ H o
ieşire
4!#. 9.1.15. 5chema bloc a sistemului reprezentat în fig. <.).)7.:evenind la analiza fenomenului fizic de la care am plecat pentru a realiza modelul, se constată
fel de bine, sistemul poate fi considerat ca fiind format dintr&un punct material de masăm care este prins cuo tijă de un punct fix 0. /unctul material se mişcă în planul x0O şi are componentele vitezei pe celeaxe - şi % . /entru aceste viteze se va considera în bond&graph câte o joncţiune ). eoarece în articuexistă frecare proporţională cu viteza unghiulară a tijei, atunci mai trebuie considerată o joncţiune ) şi
această viteză. e ea va fi legat elementul disipativ : având parametrulγ .in fig. <.).)7. se deduc relaţiile cosl - = , sinl % = ,
care, prin derivare, conduc la următoarele relaţii de legătură între viteze( ω sinsin l l −=−= ,
ω coscos l l % == .'le arată că, între joncţiunile ) corespunzătoare vitezelor - , % şi ω , vor trebui introduse transformatoarmodulate de deplasare pentru care valorile concrete ale parametrilor se vor stabili după desenareagraph&ului şi atribuirea cauzalităţii. ^ond&graph&ul va conţine câte un element inerţial legat de joncorespunzătoare vitezelor - şi % având fiecare parametrul de mărimem şi o sursă de efort incidentă joncţiunii ) corespunzătoare vitezei - pentru modelarea acţiunilor forţei de greutate. "n fig. <.).)<. ereprezentat bond&graph&ul cauzal al sistemului din fig. <.).)7. considerat ca punct material în mişcar
l cos M26. .mg ( )
:( γ % ( m
)+
7 =
ω = sin&
)l − #?$ H
o
)
% ( m
-
>
M26. .< 8 )
C
%
∫ t ?
4!#. 9.1.19. ^ond&graph&ul cauzal al sistemului din fig. <.).)7.considerat ca punct material în mişcare plană
"n decursul atribuirii cauzale se constată că atunci când unul din elementele % capătă cauzalitate icelălalt rezultă în cauzalitate derivativă. 5e alege situaţia în care elementul %+ este în cauzalitate integrală iarelementul %C în cauzalitate derivativă.
inând cont de modul de definire a parametrilor transformatoarelor în cazul general şi de relexistente între cele trei viteze din cadrul acestui sistem, se ajunge la următoarea formă a ecuconstitutive ale celor două transformatoare modulate
)7C

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 139/145
=7 sin)
el
e
−= ,
7= sin)
f l
f
−= ,
respectiv8< cos el e = ,
<8 cos f l f = .:ezultă că parametrii celor două transformatoare modulate sunt
sin)7,=
l / M8' −= ,
şi respectiv cos<,8 l / M8' = .
/entru calculul acestor parametri este necesară cunoaşterea variabileiS şi utilizarea ei în formule.^ond&graph&ul arată cum se realizează acest lucru prin preluarea semnalului viteză unghiularăω #t $ din
joncţiunea ) corespunzătoare şi apoi integrarea lui pentru a obţine semnalulS#t $. cest semnal este apoitrimis către parametrii transformatoarelor modulate pentru ca aceştia să poată fi calculaţi.^ond&graph&ul din fig. <.).)<. poate fi simplificat prin eliminarea joncţiunii ) corespunzătoare
% , rezultând bond&graph&ul simplificat din fig. <.).)8.
l cos M26. .mg ( 5 e )
:( γ
% ( m)+
7 =
ω = sin&
)l
−
#?$ H
o
)
% ( m
-
>
M26. .< 8
#t $∫ t ?
4!#. 9.1.1:. ^ond&graph&ul cauzal simplificat provenit din bond&graph&u fig. <.).)<.'cuaţiile constitutive ale elementelor %+, %C şi : sunt respectiv
m p
f ++ = ,
88 mf p = ,
>> f e γ = .'cuaţiile constitutive ale joncţiunii ) corespunzătoare vitezei - sunt
?7+ =−− e pmg ,
+7) f f f == ,
iar ale joncţiunii ) corespunzătoare vitezeiω sunt?<>= =−− eee ,
=<> f f f == .
eoarece există un element % în cauzalitate integrală şi unul în cauzalitate derivativă, vom obecuaţie diferenţială de stare în funcţia necunoscută p+ #aferentă elementului % în cauzalitate integrală$, ctotodată, conţine şi funcţia $#8 t p . 'cuaţia de stare se deduce prin înlocuiri succesive astfel
)7;

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 140/145
,cossin
)sin
)$cos#
sin)
$#sin
)sin
)
8+
8>
<>=7+
+
−+=++=
=++=+=−=
pl m
pl l
mg el f l
mg
eel
mg el
mg emg p
γ
γ
rezultând, în final, de forma
8++++ sincos
sin p pml mg p
γ
+−= ./e de altă parte între p+#t $ şi p8#t $ există următoarea relaţie de natură algebrică(
−=== +<88 sin
)coscos f
l ml f ml mf p
,
sau
+8 sincos
p p −= .
/rin derivare, se obţine
+++8 sincos
sin
) p p p
ω −−= ,
care substituită în ecuaţia de stare conduce la(
+7+++++ sin
cos
sinsin
) p p
ml mg p ω
γ
+−= .
"ntre variabila f = Hω şi variabila p+ se poate scrie relaţia
ω sin+ l m
p −= ,
care permite rescrierea ecuaţiei de stare sub forma(++++++
++
sin
cos)sin p
ml p
ml mg p
γ −−= .
'a trebuie asociată cu ecuaţia
sin+
ml p−= ,
pentru a forma un sistem de ecuaţii diferenţiale în variabileleS şi p+ de tipul descrierii de stare neliniare#+.<.)$. /recizăm că sistemul de ecuaţii diferenţiale neliniare de mai sus în funcţiile necunoscute p+#t $ şiS#t $are funcţia vectorială din membrul drept continuă Bipschitz pe orice mulţime compactă dinR + cu restricţiade ordin fizic $,# π π − . cest fapt garantează existenţa şi unicitatea soluţiei pentru problema *aucasociată sistemului. *ontinuitatea Bipschitz se dovedeşte uşor ţinând cont că un raport de forma sin+ p are întotdeauna semnificaţia unei viteze unghiulareω multiplicată cu o constantă finită #4 ml $. stfelmajorarea cerută de condiţia Bipschitz poate fi exprimată ca o funcţie deω pentru care contextul fizicasigură mărginire. in aceste raţiuni, valoarea zero a unghiuluiS nu este exclusă din compactul pentru carse defineşte membrul drept.
5istemul se poate scrie în funcţie de variabila viteză f =+ în loc de variabila impuls p+, pe bazaderivatei relaţiei de definiţie a elementului %+
++)
pm
f = .
upă înlocuiri, se obţine sistemul+
+++++
+sin
cos)sin f
l f
ml g f
γ −−= ,
)=?

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 141/145
sin+
l f −= .
e asemenea, ţinând cont de relaţiaω sinsin =+ l f l f −=−=
şi de derivata ei
ω sincos ++ l l f −−= , prima ecuaţie din sistem se poate scrie în funcţie de variabilaω , rezultând aceleaşi ecuaţii de stare ca încazul anterior, când pendulul a fost modelat ca un rigid în mişcare de rotaţie(
ω γ
ω +
sinml l
g −−= ,
ω = .5chema bloc a sistemului modelat ca punct material în mişcare plană este reprezentată în fig. <
#t $?Nf +#?$
f > dt d
m
e>
e=
f 8 f =
l cos
R
R
γ
]
]
e8e7]
v N f +
mg H e)
]ieşire
R
∫ t d m ?)
τ
e+
f + f 7
sin
)
l −
f <
e<
ω #t $
#?$ H
∫ t d ? τ
4!#. 9.1.1;. 5chema bloc a sistemului din fig. <.).)7.văzut ca punct material în mişcare plană
E2emplul 9.1.,.
5e consideră mecanismul bielă&manivelă din fig. <.).Manivela are lungimea & şi momentul de inerţie F în raportcu axa de rotaţie, ea fiind acţionată de un cuplu motor M m#t $.^iela are lungimeal , masă neglijabilă şi acţionează un piston de masăm. supra acestuia acţionează o forţă defrecare ' de modul constant.
acă se notează cu v viteza pistonului, atunci forţa ' sescrie ' v '
vv
' $sgn#=−= .
/entru a construi bond&graph&ul sistemului, se consideră câte o joncţiune ) pentru viteza ungω = a manivelei şi pentru viteza v = a pistonului. "ntre cele două viteze se poate stabili o legătură c
se obţine scriind coordonata a pistonului şi apoi derivând această coordonată. in fig. <.).);. rezultă că +++ sincos &l & - −+= .
erivând în raport cu timpul relaţia anterioară, se obţine
−+−=
+++
+
sin
cossinsin &l
& & .
)=)
M m#t $
%
& l
^* 0
4!#. 9.1.1<. Mecanism bielă&manivelă al cărui bond&graph conţine un transportor modulat

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 142/145
ceastă relaţie arată că între cele două joncţiuni ) asociate vitezelor, trebuie să existe un transformmodulat. ^ond&graph&ul sistemului este reprezentat în fig. <.).+?.
M26. .m#t $ ( 5 e )
%(m
7,= M8' /
)+
7 =
ω = #?$
)
% ( F
v =
><
' vv−(5e
∫ t ?
4!#. 9.1.&=. ^ond&graph&ul cauzal al sistemului din fig. <.).);.6orţa de frecare este modelată ca o sursă modulată care absoarbe putere. "n cursul atribuirii ca
se constată că unul din elementele % rezultă în cauzalitate derivativă când celuilalt i se atribuie caintegrală. 5&a considerat elementul %+ în cauzalitate integrală, dar, la fel de bine, se putea considera eleme%> în cauzalitate integrală. Mărimile de intrare sunt M m#t $ şi ' , iar mărimea de ieşire se consideră vitezav a
pistonului.'cuaţiile constitutive ale transformatorului modulat sunt
=7,=
7 e/ e M8' = ,
77,=
= f / f M8' = ,
unde
−+−= +++7,= sincos)sin &l & &/ M8' .
'cuaţiile constitutive ale elementelor % sunt
F
p
f +
+ = ,>> mf p = .
'cuaţiile constitutive ale joncţiunii ) corespunzătoare vitezei unghiulareω sunt?$# 7+ =−− e pt M m ,
+7) f f f == ,iar cele ale joncţiunii ) corespunzătoare vitezeiv sunt
?<>= =−− e pe ,
=>< f f f == .'cuaţia de stare scrisă pentru elementul %+ în cauzalitate integrală este(
$#$#$#$# <>7,=
=7,=
7+ e p/ t M e/ t M et M p M8' m M8' mm +−=−=−= .
atorită prezenţei în aceasta ecuaţie a funcţiei $#> t p , trebuie determinată o relaţie algebrică între p+ şi p>.ceasta se găseşte plecând de la relaţia constitutivă a elementului %>, obţinându&se
F p
m/ f m/ f m/ mf mf p M8' M8' M8' +7,=
+7,=
77,=
=>> ===== .
/rin derivare în raport cu timpul se obţine(
( ) +7,=+
++7+++
+=++
+>sin
+cossincos p/
F m
p &l
l & & &
F m
p M8' +
−++−=
.
)=+

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 143/145
acă, pentru simplificarea scrierii, facem notaţia
( ) ,sin
+cossincos
+7+++
+=++
α
&l
l & & &
−+−−=
atunci relaţia anterioară se scrie
.+7,=+
++> p/
F
m p
F
m p M8'
+= α
6acem acum înlocuirea în ecuaţia de stare ţinând cont şi de faptul că
F p
/ v M8' +7,== ,
#care este şi ecuaţia de ieşire$, rezultând(
( ) ( ) '
/
/ p
F
m/ t M
F m
/ p M8'
M8' M8' m M8' 7,=
+7,=+++
7,=+7,=+ $#) −−=
+ α .
ceastă ecuaţie se completează cu ecuaţia
F p += ,
conducând astfel la o ecuaţie de stare neliniară de ordinul doi de forma #+.<.)$.ceastă reprezentare se poate formula şi în variabilele de stareω #t $ şiS#t $ pe baza relaţiei
F p +=ω ,
precum şi în variabilele de starev#t $ şiS#t $ pe baza relaţiei
F p
/ v M8' +7,== ,
rezultând(. ω =
( )( )
( )( ) ( )+7,=7,=+7,=
+7,=
+7,=
7,= $#
M8'
m
M8' M8'
M8'
M8'
M8'
/ m F
t M
/ / m F
/ '
/ m F
9 m
++
+
−+
−= ω α
ω .
5chema bloc a sistemului este reprezentată în fig. <.).+).
f >
dt d
m
e>
e=
f =
7,= M8' /
R
R]
sgn−
' e7 ]
f > N v
M m#t $
]
ieşire
intrareR
∫ t d F ?) τ
e+
ω N f + f 7 f <
e<
#?$
intrare
ω #?$∫ t d ?
4!#. 9.1.&1. 5chema bloc a sistemului din fig. <.).);.
E2emplul 9.1.*.5e consideră sistemul hidraulic a cărui structură şi funcţionare este descrisă în 'xemplul +.<.7
capitolul + şi este reprezentat în fig. +.<.). 5pre deosebire de modelul construit în 'xemplul +.<
)=7

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 144/145
exemplul curent vom considera drept mărime de ieşire presiunea C #t $ de la baza rezervorului #care, evideneste proporţională prin factorul ρ g cu înălţimea H #t $ luată ca mărime de ieşire în 'xemplul +.<.7$. ^ongraph&ul sistemului este desenat în fig. <.).++.
t ? G
g 5 e ) :( ( $#: t C cA
A?
–
D #?$
D C
4!#. 9.1.&&. ^ond&graph&ul sistemului hidraulic reprezentat în fig. +.<.). conţinând o sursă contro:ezervorul este modelat ca o sursă de efort care generează presiunea hidraulică gH ρ iar robinetul
ca un element disipativ :. 'lementul : este în cauzalitate conductivă şi este neliniar, ecuaţia sa constitufiind de forma
$#? C A c &Ψ = .
vând în vedere relaţia neliniară considerată în 'xemplul +.<.7+?/A C = ,
rezultă că ecuaţia constitutivă a elementului disipativ este/ C A =? .
eoarece debitele de umplereA#t $ şi de golireA?#t $ influenţează mărimea presiunii de la bazrezervorului, aceasta face ca funcţionarea sursei de presiune din fig. +.<.). să fie modelată ca ocomandată. /resupunând că în rezervor se află iniţial volumulD #?$, atunci acest volum, după deschidererobinetelor, devine
( )∫ −+=+= t t d AAD D D t D
?$#$#$?#$?#$# ? τ τ τ ∆ .
@olumul din rezervor se exprimă în funcţie de ariaG a acestuia şi înălţimea H a fluidului cu relaţiile$#$# t GH t D = ,$?#$?# GH D = ,
unde H #?$ este înălţimea iniţială a fluidului. :elaţia de calcul a volumului de fluid din rezervor capătăînlocuiri, forma
( ) τ τ τ d AAGH t GH t t ∫ −+=
?$#$#$?#$# ? .
eoarece presiunea C de la baza rezervorului se calculează cu relaţia generică gH C ρ = ,
unde ρ este densitatea volumică a fluidului, g este acceleraţia gravitaţională iar H este înălţimea fluiduluidin vas, atunci se amplifică relaţia de calcul a volumului de fluid din rezervor cu produsul g ρ şi se obţine
( )∫ −+= t t d AA g G gH G t gH
?$#$#$# ?? τ τ τ ρ ρ ρ ,
care conduce la( )∫ −+= t
t d AA g G C G t C ?
$#$#$# ?? τ τ τ ρ .
erivând relaţia anterioară, rezultă
$#$#$# ? t AG g
t AG g
t C ρ ρ −= .
inând cont de faptul că debitul de golire este/ t C t A $#$#? = ,
)==

8/13/2019 Curs SDIM 2013
http://slidepdf.com/reader/full/curs-sdim-2013 145/145