Embed Size (px)
Citation preview
1
Tema 16: Momento de una Fuerza. Palancas.
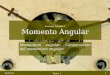
Figura 1.Como ya se introdujo, la dinámica puede tratar problemas cinéticos (resultante de fuerzas que dan lugar a movimiento) y problemas estáticos (fuerzas en equilibrio). Sin embargo, hasta el momento hemos analizado sistemas estáticos sencillos carentes de rotación. La condición de sistema estático es en general mas compleja.g p j
Los análisis biomecánicos estáticos son de especial importancia en el diagnóstico y prevención de lesiones músculo-esqueléticas y juegan un papel determinante en la ergonomía. De estas vinculaciones se deduce la importancia de la utilización de g papropiados descriptores anatómicos.
La condición de equilibrio de un sistema biomecánico sin rotación es:
Sin embargo esta condición no es única si el punto de aplicación de las
0=∑ iF
Sin embargo, esta condición no es única si el punto de aplicación de las fuerzas no es el mismo ya que se induce una rotación.
Ejemplo. En la imagen de la figura 1, si el bíceps realiza una fuerza igual (pero de sentido contrario) al peso del objeto sostenido entonces el (pero de sentido contrario) al peso del objeto sostenido, entonces el antebrazo cae rotando a lo largo de la articulación del codo.
Las rotaciones en nuestro cuerpo se pueden producir a lo largo de cinco tipos de articulaciones según el numero de grados de libertad que
Figura 2.tipos de articulaciones según el numero de grados de libertad que posean.
Tema 16: Momento de una Fuerza. Palancas.
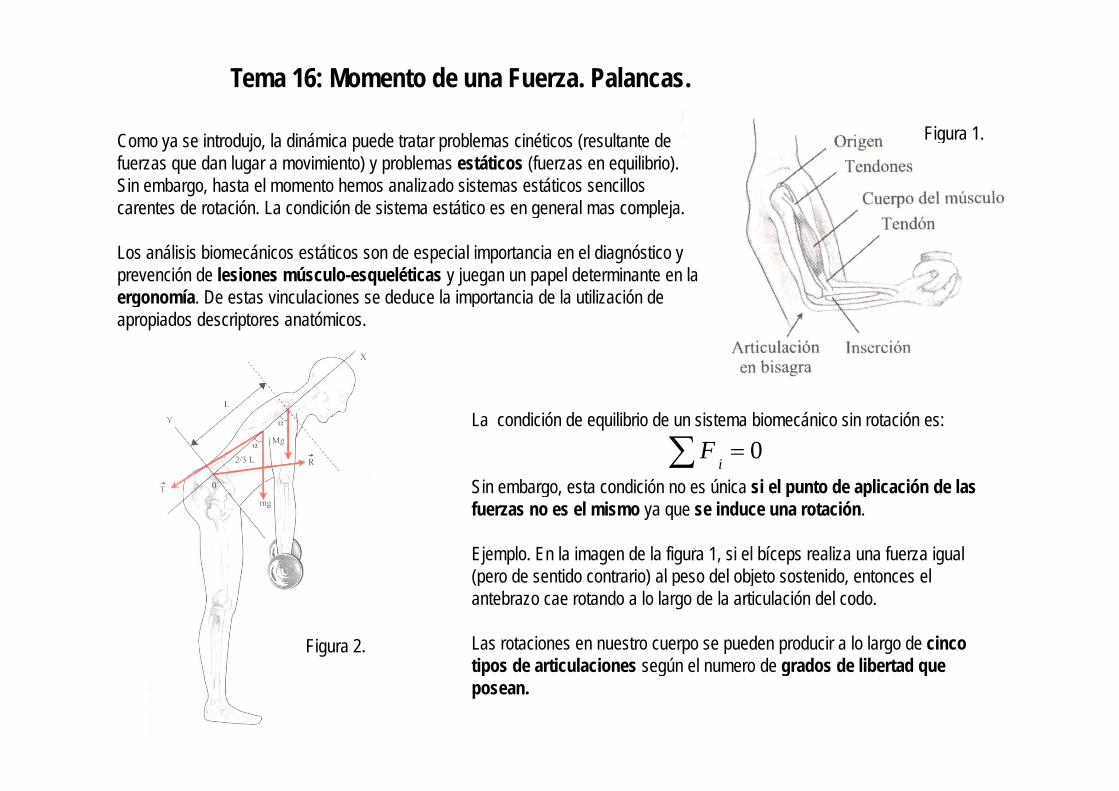
3Figura 3. Las articulaciones mas sencillas son las de la rodilla y codo (bisagra) que permiten la rotación en torno a un solo eje. La muñeca cuenta con un doble eje de rotación con direcciones ortogonales (articulación condílica). La columna rota en torno a la cadera según una articulación de tipo pivote. Las articulaciones de g p pla cadera y hombro son de tipo esferoide y dan lugar a los mayores grados de libertad. Finalmente, las vértebras son articulaciones deslizantes que permiten realizar una rotación mediante la acumulación de desplazamientos relativos de las unas sobre las otras.
Para que se dé una situación estática en sistemas que comprenden estas articulaciones, el equilibrio de fuerzas debe producirse teniendo en cuenta los puntos de aplicación de fuerzas musculares y cargas con respecto al punto p p y g p pde rotación.
La magnitud que tiene en cuenta tanto a las fuerzas como a su distancia respecto al punto de aplicación es el Momento de la fuerza, que nos da una
→→→
×= FrMDonde r es un vector de posición entre el punto de rotación y el punto de
p p p qidea de la intensidad de la rotación originada.
0=∑M
Donde r es un vector de posición entre el punto de rotación y el punto de aplicación de la fuerza. La condición adicional para asegurar la situación estática de un sistema biomecánico es:
0∑ iM
Ejemplo: Para el ejercicio de bíceps de la figura 1 representar la dirección del momento M en la situación de ascenso y descenso de la carga.
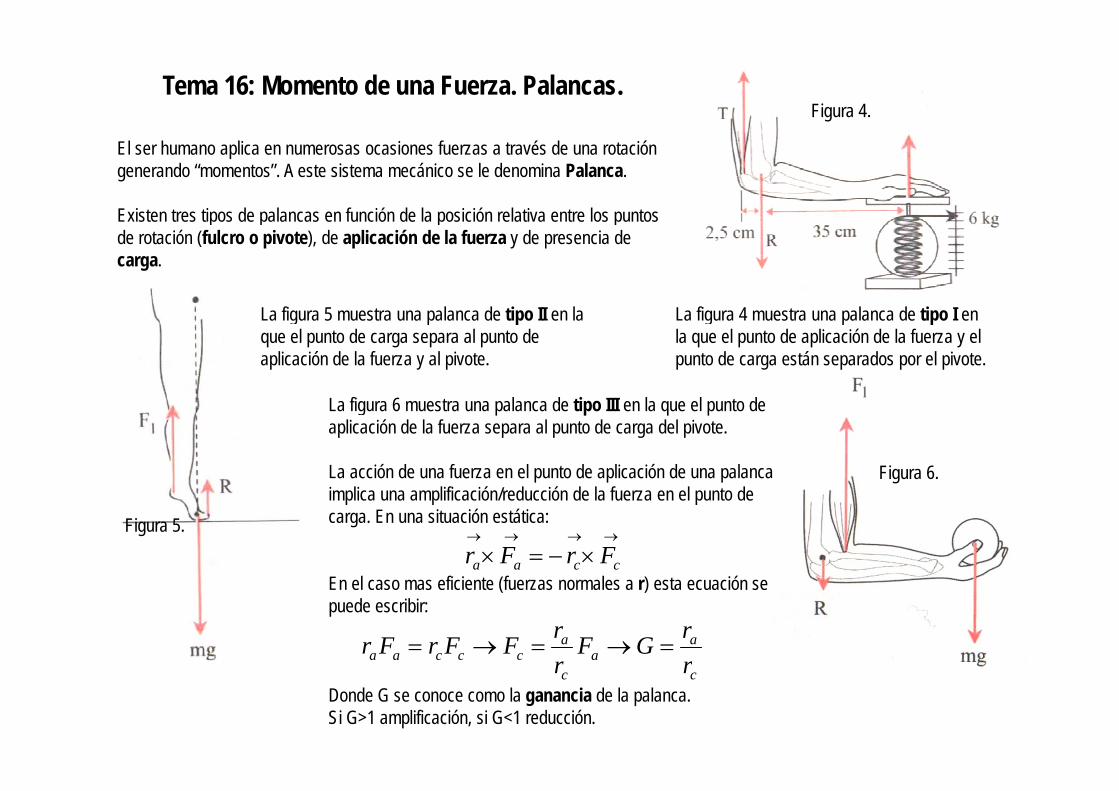
Figura 4.Tema 16: Momento de una Fuerza. Palancas.
El ser humano aplica en numerosas ocasiones fuerzas a través de una rotación generando “momentos”. A este sistema mecánico se le denomina Palanca.
Existen tres tipos de palancas en función de la posición relativa entre los puntos Existen tres tipos de palancas en función de la posición relativa entre los puntos de rotación (fulcro o pivote), de aplicación de la fuerza y de presencia de carga.
La figura 4 muestra una palanca de tipo I en la que el punto de aplicación de la fuerza y el punto de carga están separados por el pivote.
La figura 5 muestra una palanca de tipo II en la que el punto de carga separa al punto de aplicación de la fuerza y al pivote.
Figura 2.
Figura 6.
La figura 6 muestra una palanca de tipo III en la que el punto de aplicación de la fuerza separa al punto de carga del pivote.
La acción de una fuerza en el punto de aplicación de una palanca
Figura 5.implica una amplificación/reducción de la fuerza en el punto de carga. En una situación estática:
→→→→
×−=× ccaa FrFrEn el caso mas eficiente (fuerzas normales a r) esta ecuación se puede escribir:
aa
acccaa r
rGFrrFFrFr =→=→=
Donde G se conoce como la ganancia de la palanca.Si G>1 amplificación, si G<1 reducción.
cc rr
á f
Tema 17: Dinámica AngularEn la dinámica lineal vimos que la magnitud que identifica la capacidad de un cuerpo para originar una fuerza es su momento lineal (p). En la dinámica angular existe igualmente una magnitud que refleja esa capacidad de generar una rotación.
Figura 1.
En este capítulo vamos a tratar al cuerpo humano (y otros objetos de la biomecánica deportiva) como un sólido rígido, es decir, como un objeto que conserva perfectamente la posición relativa entre dos
t l i d Si b t puntos cualesquiera de su cuerpo. Sin embargo, nuestro cuerpo es elástico (deformable) y no rígido, por lo que nuestras observaciones estarán sujetas a desviaciones debidas a la aproximación de sólido rígido.
→→→Figura 2
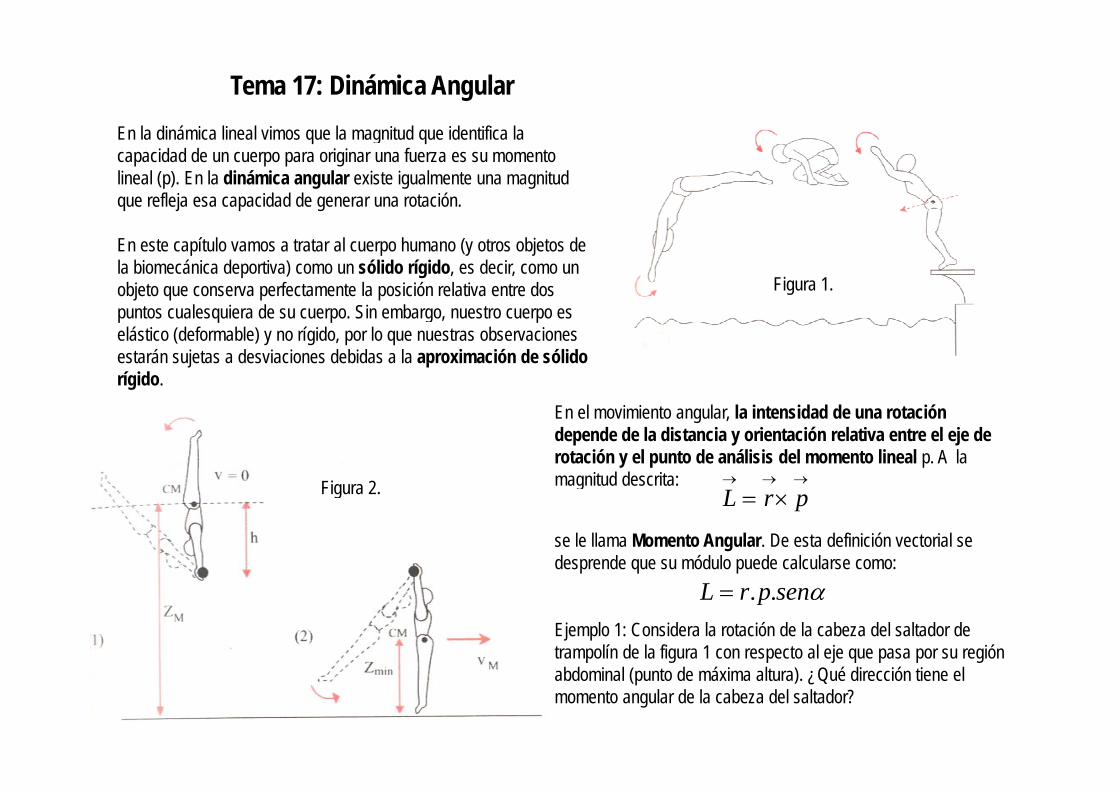
En el movimiento angular, la intensidad de una rotación depende de la distancia y orientación relativa entre el eje de rotación y el punto de análisis del momento lineal p. A la magnitud descrita:
se le llama Momento Angular. De esta definición vectorial se desprende que su módulo puede calcularse como:
×= prLFigura 2. magnitud descrita:
Ejemplo 1: Considera la rotación de la cabeza del saltador de trampolín de la figura 1 con respecto al eje que pasa por su región
αsenprL ..=
abdominal (punto de máxima altura). ¿Qué dirección tiene el momento angular de la cabeza del saltador?
Al tratarse de sistemas en rotación el momento lineal resulta poco operativo y
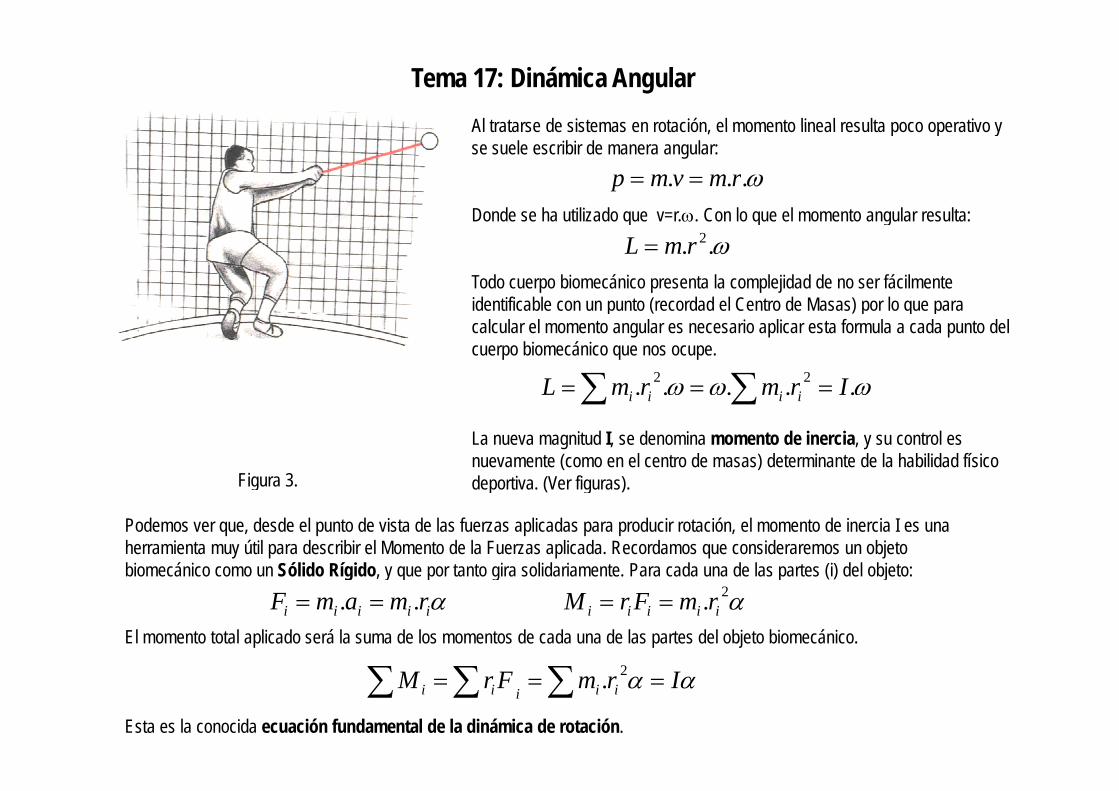
Tema 17: Dinámica AngularAl tratarse de sistemas en rotación, el momento lineal resulta poco operativo y se suele escribir de manera angular:
Donde se ha utilizado que v=rω Con lo que el momento angular resulta:
ω... rmvmp ==Donde se ha utilizado que v=r.ω. Con lo que el momento angular resulta:
Todo cuerpo biomecánico presenta la complejidad de no ser fácilmente identificable con un punto (recordad el Centro de Masas) por lo que para
ω.. 2rmL =
identificable con un punto (recordad el Centro de Masas) por lo que para calcular el momento angular es necesario aplicar esta formula a cada punto del cuerpo biomecánico que nos ocupe.
ωωω ..... 22 IrmrmL iiii === ∑∑La nueva magnitud I, se denomina momento de inercia, y su control es nuevamente (como en el centro de masas) determinante de la habilidad físico deportiva (Ver figuras)
iiii ∑∑
Figura 3. deportiva. (Ver figuras).
Podemos ver que, desde el punto de vista de las fuerzas aplicadas para producir rotación, el momento de inercia I es una herramienta muy útil para describir el Momento de la Fuerzas aplicada. Recordamos que consideraremos un objeto biomecánico como un Sólido Rígido, y que por tanto gira solidariamente. Para cada una de las partes (i) del objeto:
Figura 3.
biomecánico como un Sólido Rígido, y que por tanto gira solidariamente. Para cada una de las partes (i) del objeto:
El momento total aplicado será la suma de los momentos de cada una de las partes del objeto biomecánico.
αiiiii rmamF .. == α2. iiiii rmFrM ==
Esta es la conocida ecuación fundamental de la dinámica de rotación.
αα IrmFrM iiiii === ∑∑∑ 2.
Tema 17: Dinámica Angular
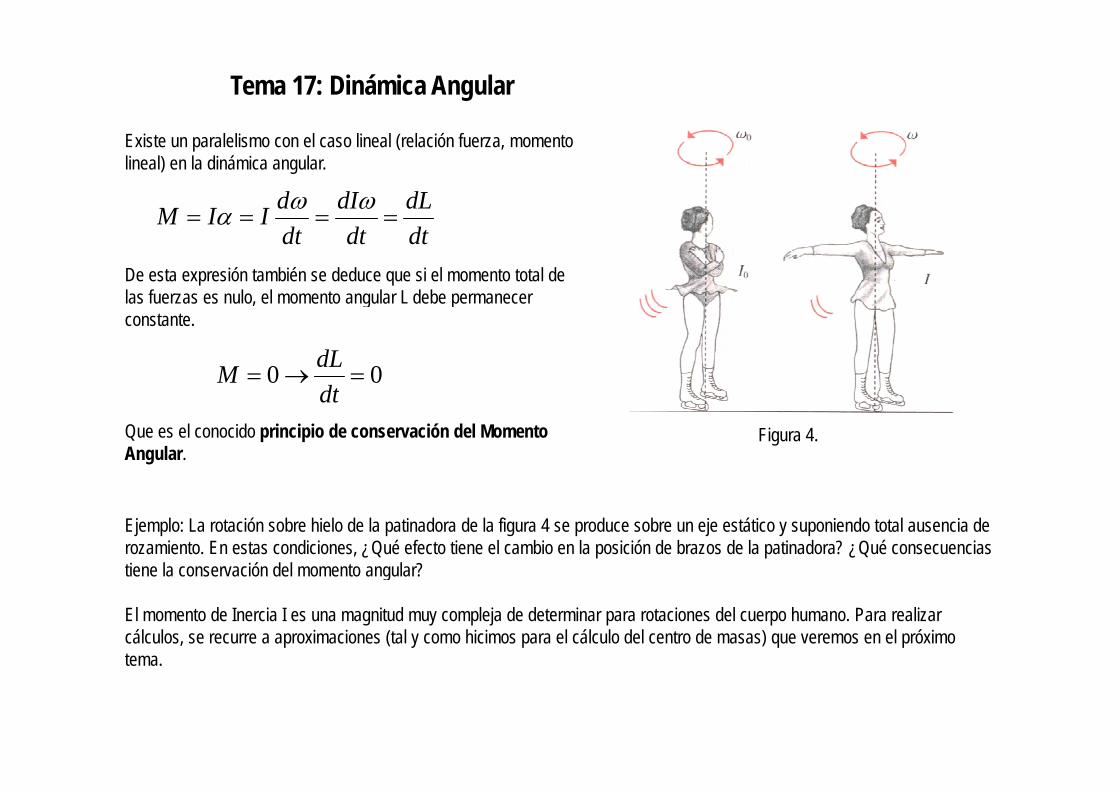
Existe un paralelismo con el caso lineal (relación fuerza, momento lineal) en la dinámica angular.
dLdIdIIM ====ωωα
De esta expresión también se deduce que si el momento total de las fuerzas es nulo, el momento angular L debe permanecer
dtdtdtIIM ==== α
, g pconstante.
00 =→=dtdLM
Que es el conocido principio de conservación del Momento Angular.
Figura 4.
dt
Ejemplo: La rotación sobre hielo de la patinadora de la figura 4 se produce sobre un eje estático y suponiendo total ausencia derozamiento. En estas condiciones, ¿Qué efecto tiene el cambio en la posición de brazos de la patinadora? ¿Qué consecuencias tiene la conservación del momento angular?tiene la conservación del momento angular?
El momento de Inercia I es una magnitud muy compleja de determinar para rotaciones del cuerpo humano. Para realizar cálculos, se recurre a aproximaciones (tal y como hicimos para el cálculo del centro de masas) que veremos en el próximo tema.tema.
Tema 18: Centro de Masas y Momento de Inercia
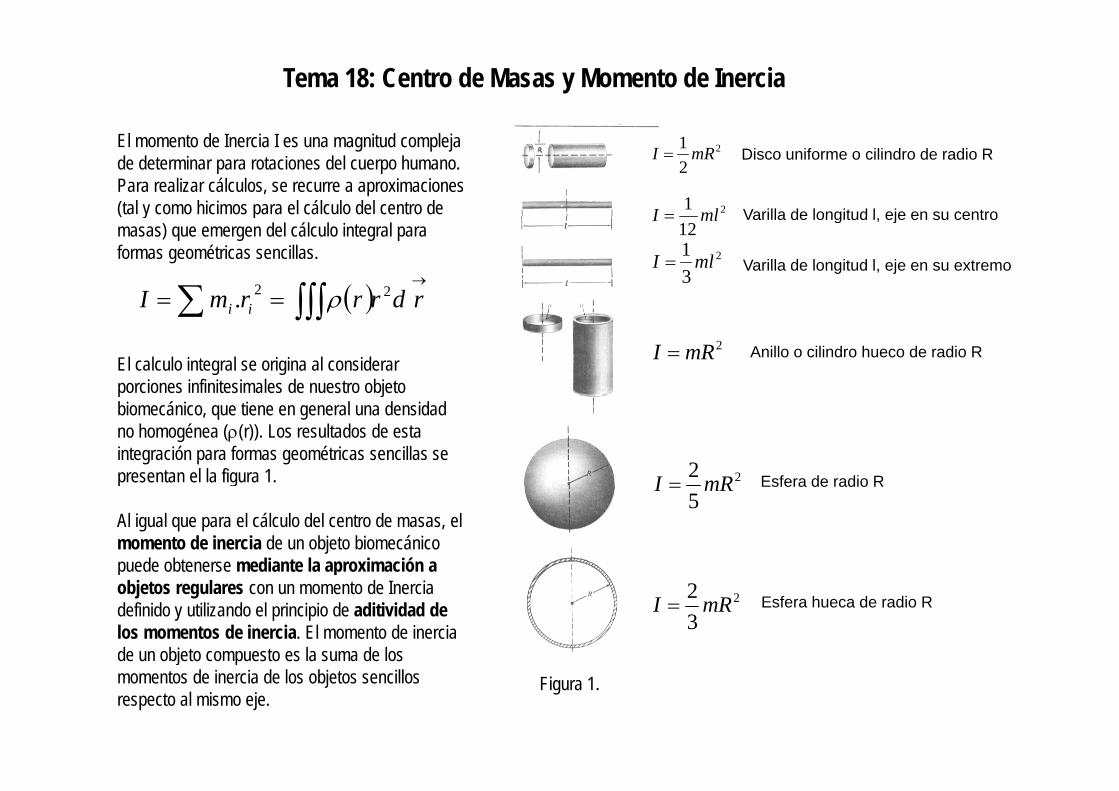
El momento de Inercia I es una magnitud compleja de determinar para rotaciones del cuerpo humano. Para realizar cálculos, se recurre a aproximaciones (tal y como hicimos para el cálculo del centro de
2
21 mRI = Disco uniforme o cilindro de radio R
21 mlI = Varilla de longitud l eje en su centro( y pmasas) que emergen del cálculo integral para formas geométricas sencillas.
12mlI =
2
31 mlI =
Varilla de longitud l, eje en su centro
Varilla de longitud l, eje en su extremo
( )→
∫∫∫∑ == rdrrrmI ii22. ρ
El calculo integral se origina al considerar porciones infinitesimales de nuestro objeto
2mRI = Anillo o cilindro hueco de radio R
( )∫∫∫∑ rdrrrmI ii . ρ
p jbiomecánico, que tiene en general una densidad no homogénea (ρ(r)). Los resultados de esta integración para formas geométricas sencillas se presentan el la figura 1. 22 mRI = Esfera de radio Rp g
Al igual que para el cálculo del centro de masas, el momento de inercia de un objeto biomecánico puede obtenerse mediante la aproximación a
5mRI = Esfera de radio R
p pobjetos regulares con un momento de Inercia definido y utilizando el principio de aditividad de los momentos de inercia. El momento de inercia de un objeto compuesto es la suma de los
2
32 mRI = Esfera hueca de radio R
momentos de inercia de los objetos sencillos respecto al mismo eje.
Figura 1.
Tema 18: Centro de Masas y Momento de Inercia
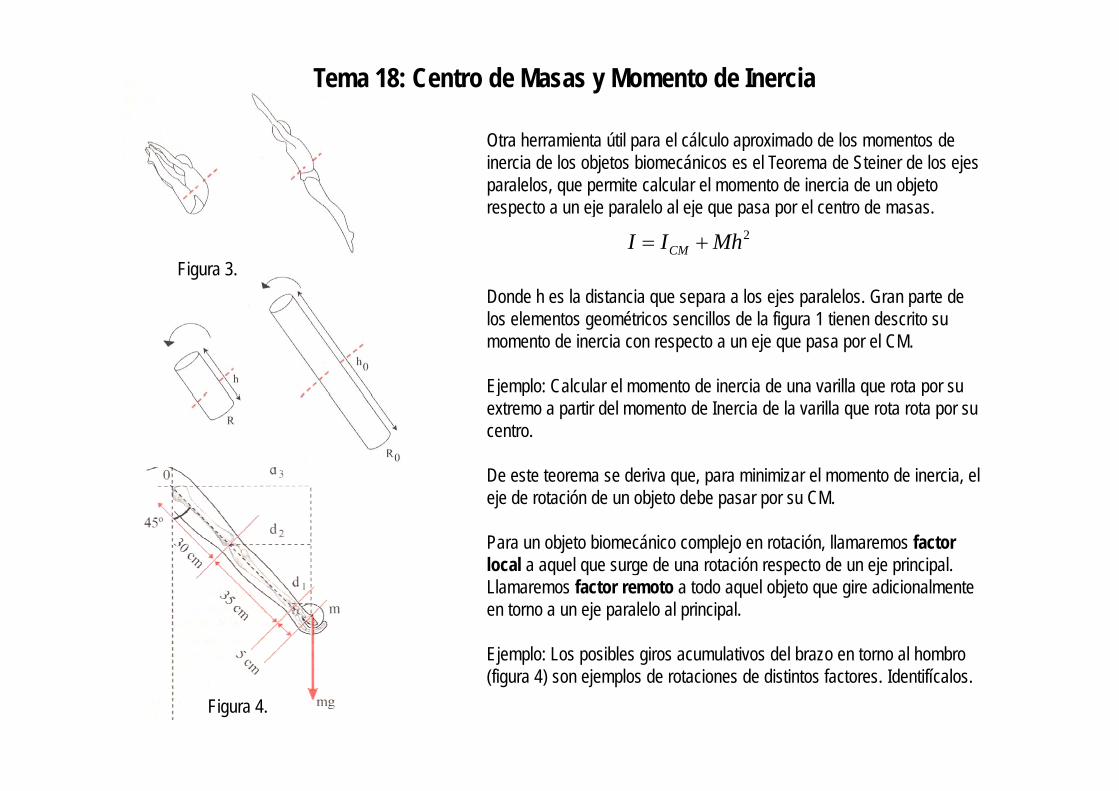
Otra herramienta útil para el cálculo aproximado de los momentos de inercia de los objetos biomecánicos es el Teorema de Steiner de los ejes paralelos, que permite calcular el momento de inercia de un objeto respecto a un eje paralelo al eje que pasa por el centro de masas.p j p j q p p
Donde h es la distancia que separa a los ejes paralelos. Gran parte de Figura 3.
2MhII CM +=
q p j p plos elementos geométricos sencillos de la figura 1 tienen descrito su momento de inercia con respecto a un eje que pasa por el CM.
Ejemplo: Calcular el momento de inercia de una varilla que rota por su j p q pextremo a partir del momento de Inercia de la varilla que rota rota por su centro.
De este teorema se deriva que, para minimizar el momento de inercia, el eje de rotación de un objeto debe pasar por su CM.
Para un objeto biomecánico complejo en rotación, llamaremos factor local a aquel que surge de una rotación respecto de un eje principal. Llamaremos factor remoto a todo aquel objeto que gire adicionalmente en torno a un eje paralelo al principal.
Ejemplo: Los posibles giros acumulativos del brazo en torno al hombro (figura 4) son ejemplos de rotaciones de distintos factores. Identifícalos.
Figura 4.
Tema 18: Centro de Masas y Momento de Inercia
Los sistemas de captura de imagen y la aplicación de modelos de aproximación permiten analizar las secuencias de los momentos de inercia de atletas y gimnastas. Estos estudios biomecánicos son básicos en la alta y gcompetición como sistema de perfeccionamiento.
En la figura 3 se muestra como el cambio de posición de un saltador de trampolín se puede asemejar al cambio de longitud y radio de un cilindro con p p j g ymomento de inercia conocido.
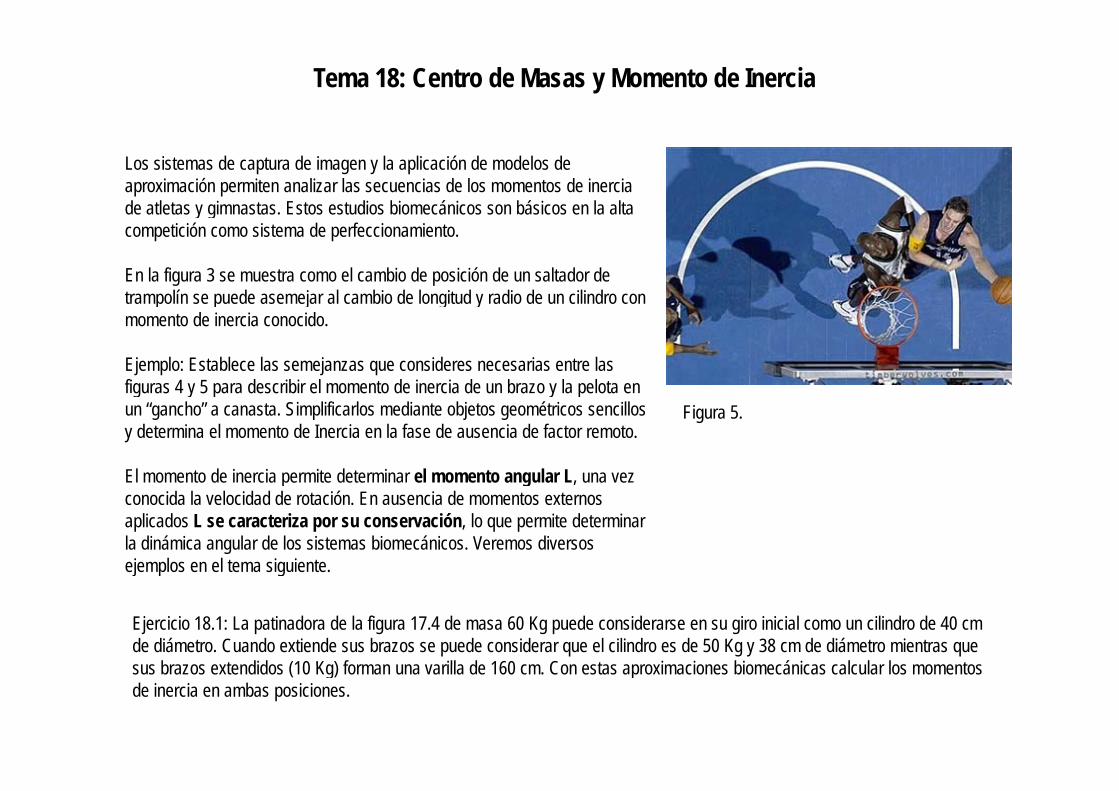
Ejemplo: Establece las semejanzas que consideres necesarias entre las figuras 4 y 5 para describir el momento de inercia de un brazo y la pelota en g y p y pun “gancho” a canasta. Simplificarlos mediante objetos geométricos sencillos y determina el momento de Inercia en la fase de ausencia de factor remoto.
El momento de inercia permite determinar el momento angular L, una vez
Figura 5.
p gconocida la velocidad de rotación. En ausencia de momentos externos aplicados L se caracteriza por su conservación, lo que permite determinar la dinámica angular de los sistemas biomecánicos. Veremos diversos ejemplos en el tema siguiente. j p g
Ejercicio 18.1: La patinadora de la figura 17.4 de masa 60 Kg puede considerarse en su giro inicial como un cilindro de 40 cmde diámetro. Cuando extiende sus brazos se puede considerar que el cilindro es de 50 Kg y 38 cm de diámetro mientras que sus brazos extendidos (10 Kg) forman una varilla de 160 cm Con estas aproximaciones biomecánicas calcular los momentos sus brazos extendidos (10 Kg) forman una varilla de 160 cm. Con estas aproximaciones biomecánicas calcular los momentos de inercia en ambas posiciones.
Tema 19: Estudio Biomecánico del Momento de InerciaTema 19: Estudio Biomecánico del Momento de Inercia
Hasta el momento hemos visto que el momento de inercia de un objeto biomecánico permite determinar tanto el momento de la fuerza (que acelera o reduce la rotación) como su momento angular (o cantidad de movimiento de rotación)
Figura 1.Hasta el momento hemos visto que el momento de inercia de un objeto biomecánico permite determinar tanto el momento de la fuerza (que acelera o reduce la rotación) como su momento angular (o cantidad de movimiento de rotación)
Figura 1.
movimiento de rotación).
Hemos visto los principios básicos que permiten determinar los momentos de inercia de objetos biomecánicos:
- Aproximación a objetos regulares
movimiento de rotación).
Hemos visto los principios básicos que permiten determinar los momentos de inercia de objetos biomecánicos:
- Aproximación a objetos regulares- Aproximación a objetos regulares.- Adición de los momentos de inercia. - Teorema de los ejes paralelos.
- Aproximación a objetos regulares.- Adición de los momentos de inercia. - Teorema de los ejes paralelos.
Figura 2.Vimos además que, para minimizar el momento de inercia, el eje de rotación de un objeto debe pasar por su CM.
Se dice que una rotación es “libre” en un objeto biomecánico cuando el
Figura 2.
objeto interacciona con el medio exclusivamente a través de un eje de rotación flotante. De lo contrario, la rotación se dice “forzada”. Se da la particularidad de que para que una rotación libre sea estable, su eje debe pasar por el CM.
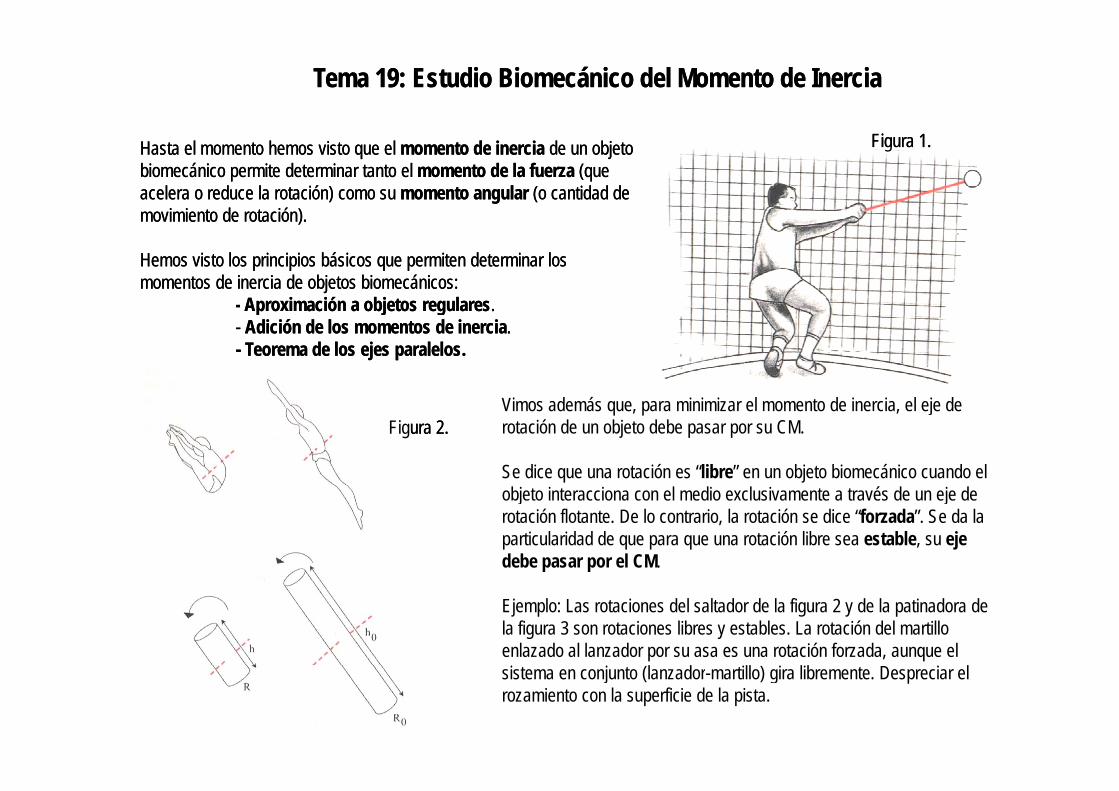
Ejemplo: Las rotaciones del saltador de la figura 2 y de la patinadora de la figura 3 son rotaciones libres y estables. La rotación del martillo enlazado al lanzador por su asa es una rotación forzada, aunque el sistema en conjunto (lanzador-martillo) gira libremente. Despreciar el rozamiento con la superficie de la pista.
Tema 19: Estudio Biomecánico del Momento de Inercia
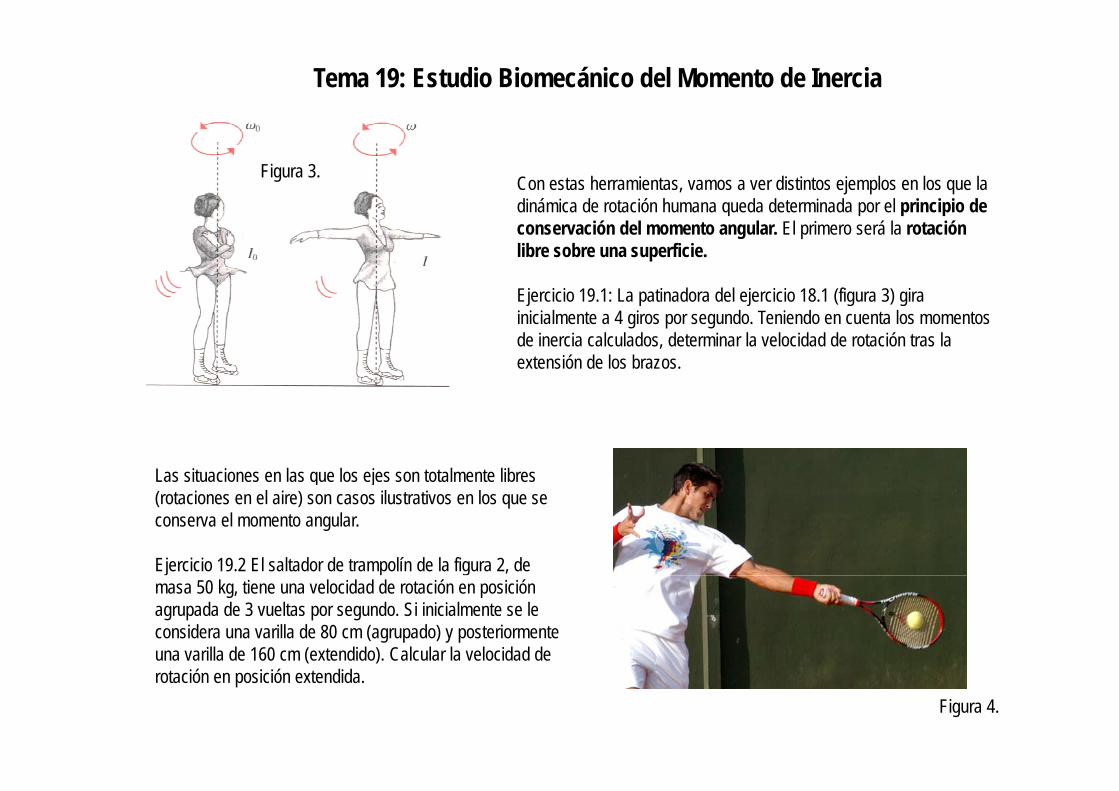
Figura 3. Con estas herramientas, vamos a ver distintos ejemplos en los que la dinámica de rotación humana queda determinada por el principio de conservación del momento angular. El primero será la rotación libre sobre una superficie.
Ejercicio 19.1: La patinadora del ejercicio 18.1 (figura 3) gira inicialmente a 4 giros por segundo. Teniendo en cuenta los momentos de inercia calculados, determinar la velocidad de rotación tras la extensión de los brazos.
Las situaciones en las que los ejes son totalmente libres q j(rotaciones en el aire) son casos ilustrativos en los que se conserva el momento angular.
Ejercicio 19.2 El saltador de trampolín de la figura 2, de masa 50 kg, tiene una velocidad de rotación en posición agrupada de 3 vueltas por segundo. Si inicialmente se le considera una varilla de 80 cm (agrupado) y posteriormente una varilla de 160 cm (extendido). Calcular la velocidad de
Figura 4.rotación en posición extendida.
Tema 19: Estudio Biomecánico del Momento de InerciaHemos visto que el lanzamiento de martillo es un buen ejemplo de una rotación forzada una rotación forzada.
Ejercicio 19.3 En el instante anterior al lanzamiento, el lanzador de martillo de la figura 1 (90 Kg) gira a velocidad constante de 2 vueltas por segundo Considerando su cuerpo como un cilindro vueltas por segundo. Considerando su cuerpo como un cilindro (20 cm de radio y 75 Kg), sus brazos como una varilla ( 80 cm, 15 Kg) y el martillo como una bola de 5 Kg (cadena de 40 cm de masa y radio despreciables), calcular el momento angular del sistema Si la bola sale despedida con una velocidad idéntica a la
Figura 5
sistema. Si la bola sale despedida con una velocidad idéntica a la correspondiente a su rotación inicial e inicia un giro sobre sí misma de 5 vueltas por segundo ¿Cuál es, aproximadamente, la velocidad de giro del lanzador justo después del lanzamiento?
Figura 5.La fase final de este movimiento (al soltar el martillo) es un claro ejemplo de conversión de la cinética angular en cinética lineal. Los distintos pasos en los que se producen estas conversiones en los sistemas biomecánicos se llaman cadenas biocinéticas sistemas biomecánicos se llaman cadenas biocinéticas.
Otros ejemplos de cadenas biocinéticas son los golpes de pelota en béisbol y tenis en los que se acumulan hasta cuatro rotaciones (caderas, hombros, codos, muñecas) para dar lugar a una interacción que va a convertir la cinética angular en cinética lineal.
Ejercicio 19.4 En el instante anterior al golpe, las caderas del tenista de la figura 4 giran a 1 v/s (masa del tronco y brazo pegado 60 Kg), sus hombros a 1.2 v/s sobre el mismo eje, (brazo extendido 10 kg) y su muñeca a 1 v/s sobre un eje paralelo a 90 cm del anterior (raqueta, 80 cm y 0.5 Kg). Realiza las aproximaciones necesarias para determinar el momento de inercia del tenista y calcula la velocidad de salida de una pelota (0.1 Kg) inicialmente parada.