Embed Size (px)
Citation preview

Dispositivo para el diagnóstico de desviaciones de la columna vertebral
Presentado por:
Yilber Serrano Navarro
20172383001
Tesis Para Obtener El Título De
INGENIERO EN CONTROL
Director:
Ing. Esperanza Camargo Casallas PhD
Grupo de investigación DIGITI
Modalidad de Investigación- Innovación
Universidad Distrital Francisco José de Caldas
Facultad Tecnológica
Bogotá D.C., Agosto 2019.

ii Agradecimientos
Gracias por el apoyo de todas las personas, familiares, padres y hermanos; profesores, en
especial a la Directora Esperanza Camargo; y demás compañeros universitarios por el apoyo en
el planteamiento, elaboración y ejecución de este proyecto.
También resaltar el apoyo de Francy Gutiérrez y a los demás compañeros especialistas
fisioterapeutas, los cuales permitieron la validación, calibración e implementación del proyecto.
Agradecer a las instalaciones de Comfacundi donde se realizaron las pruebas de calibración,
validación e implementación del dispositivo.
iii Resumen
En la presente investigación se diseñó, desarrollo e implemento un dispositivo para
diagnosticar los índices de desviación de la columna vertebral: lordosis y cifosis, y el grado de
desviación de la escoliosis; el método utilizado para la obtención de estos índices es el de flechas
sagitales y la combinación del método de Tidestron y de Cobb respectivamente.
La tecnología utilizada para tal fin, fue la board de desarrollo NodeMCU ESP8266 y
sensores ultrasonido US-100, estos permiten la medición de las distancias en cada punto de las
flechas sagitales del método, también recibe por medio de una conexión Bluetooth los datos
referentes al grado de desviación correspondiente a la escoliosis, estos datos son obtenidos con un
módulo aparte e inalámbrico constituido por la board de desarrollo Freescale FRDM-kl25z con su
acelerómetro integrado y dos tarjetas IMU MPU6050. La misma conexión Bluetooth es utilizada
bidireccionalmente para enviar los datos hacia este módulo de medición de escoliosis para mostrar
los datos en tiempo real a través de una LCD16x2 de manera local.
Los datos son procesados y enviados a través de una conexión Wifi a internet desde el
ESP8266 integrado al NodeMCU, donde son visualizados por la plataforma web desarrollada,
almacenada y gestionada por el host gratuito co.000webhost.com que permite el almacenamiento
de aquellas mediciones en una base de datos en MySQL para llevar un historial y seguimiento de
la evolución del estado de estas patologías en los pacientes diagnosticados con el dispositivo.
Las pruebas de funcionamiento, calibración, implementación y validación se llevaron a
cabo en las instalaciones de Confacundi ubicado en la Calle 53 # 10 – 39, con el apoyo de un grupo
de especialistas fisioterapeutas en rehabilitación con Hidroterapia. Los resultados de la
implementación son observables en las tablas finales del capítulo de resultados, donde se resalta
que el dispositivo permite el diagnóstico de desviaciones de la columna vertebral, pero aun así es
de maneja subjetiva en dependencia del especialista que esté realizando la medición. Por otro lado,
la accesibilidad del aplicativo web permite el objetivo del acceso remoto, control y consulta de los
datos debido a su almacenamiento en host y en la base de datos, así mismo surgen los
requerimientos para el funcionamiento del dispositivo: contar con una conexión a internet con
2Mbps de subida de datos, o para el caso de un teléfono móvil como punto de acceso, contar con
cobertura 4G, esto con el fin de garantizar una actualización y refresco de los datos.
Este proyecto se realizó bajo la supervisión del grupo de investigación DIGITI con la
modalidad de investigación y desarrollo de tecnologías para la Bioingeniería.
iv Tabla de Contenidos
1. Introducción ............................................................................................................................ 1
1.1. Planteamiento del problema ................................................................................................ 2
1.2. Justificación ........................................................................................................................ 3
1.3. Objetivos ............................................................................................................................. 4
1.3.1. General. ....................................................................................................................... 4
1.3.2. Específicos. ................................................................................................................. 4
2. Marco de referencia ................................................................................................................ 5
2.1. Estado del arte ................................................................................................................. 5
3. Marco Teórico ..................................................................................................................... 7
3.1. Columna vertebral ........................................................................................................... 7
3.2. Enfermedades ortopédicas .............................................................................................. 8
3.2.1. Escoliosis ................................................................................................................ 8
3.2.2. Tipos de escoliosis .................................................................................................. 9
3.2.3. Tipos de curvas escolióticas.................................................................................... 9
3.2.4. Cifosis ....................................................................................................................... 10
3.2.5. Tipos de cifosis y causas ....................................................................................... 11
3.2.6. Lordosis..................................................................................................................... 12
3.2.7. Tipos de lordosis ................................................................................................... 13
3.3. Diagnóstico de escoliosis, lordosis y cifosis ..................................................................... 13
3.3.1. Métodos clínicos ............................................................................................................. 13
Exploración clínica ............................................................................................................... 13
Valoración de la reductibilidad de la curva cifótica ............................................................. 15
Test de flexión del tronco con observación lateral ............................................................... 15
Exploración de la sedestación asténica ................................................................................. 15
Test de Adam ........................................................................................................................ 16
3.3.2. Métodos Radiológico ...................................................................................................... 16
Método de Cobb .................................................................................................................... 16
Método de Tideström (1964) ................................................................................................ 17
Método de Lindahl (1968) .................................................................................................... 18
4. Metodología .......................................................................................................................... 19
4.1. Introducción ....................................................................................................................... 19
4.2. Descripción de los Módulos............................................................................................... 19
4.2.1 Módulo de diagnóstico de índices................................................................................ 19
4.2.2. Módulo de diagnóstico de ángulo de escoliosis .......................................................... 20
4.2.3. Módulo de almacenamiento y visualización ............................................................... 20
4.3. Método utilizado ........................................................................................................... 20
4.4. Diseño de la estructura física .................................................................................... 21
4.5. Diseño de la PCB ...................................................................................................... 23
4.6. Diseño del aplicativo web ............................................................................................. 24
4.6.1. Diseño de la base de datos .......................................................................................... 24
4.6.2. Diseño de la página web ............................................................................................. 27
4.6.3. Programación en el NodeMCU ................................................................................. 31
4.6.4. Programación en Freescale KL25z ........................................................................... 35
4.6.5. Calibración de los sensores. ...................................................................................... 37
v 5. Resultados ............................................................................................................................. 40
5.1. Implementación.................................................................................................................. 40
5.2. Análisis de resultados ........................................................................................................ 41
5.3. Conclusiones ...................................................................................................................... 45
5.4. Trabajo Futuro .............................................................................................................. 45
6. Bibliografía ........................................................................................................................... 47
7. Anexos .................................................................................................................................. 50
vi Lista de tablas
Tabla 1. Componentes intentos del módulo de medición de escoliosis. ....................................... 37
Tabla 2. Datos recolectados para la linealización (Autores). ........................................................ 37
Tabla 3. Medidas del acelerómetro MMA8451Q (Autores). ........................................................ 38
Tabla 4. Medidas del sensor MPU6050 numero 1 (Autores). ...................................................... 38
Tabla 5. Medidas del sensor MPU6050 numero 2 (Autores). ...................................................... 38
Tabla 6. Datos Recolectados con el dispositivo............................................................................ 41
Tabla 7. Diagnóstico de acuerdo a los rangos de valores. ............................................................ 42
Tabla 8. Comparación de resultados del ángulo de escoliosis. ..................................................... 42
Tabla 9. Comparación de resultados de los Índices Lordoticos y Cifoticos. ................................ 43
Tabla 10. Cálculos de repetitividad del dispositivo. ..................................................................... 43

vii Lista de figuras
Figura 1. Columna vertebral [22].................................................................................................... 7
Figura 2. Radiografía posteroanterior de la columna toracolumbar de una niña de 13 años que
muestra escoliosis torácica derecha de 45 grados [24]. .......................................................... 8
Figura 3. Columna con cifosis [3]................................................................................................. 10
Figura 4. Radiografía de una niña de 12 años con un deslizamiento de grado III y ángulo de
deslizamiento cifótico, pero una columna vertebral y pelvis equilibradas [24]. .................. 12
Figura 5. Medición de las flechas sagitales [8]. ............................................................................ 14
Figura 6. Examen topográfico de Moiré [30]. .............................................................................. 15
Figura 7. Comparación Test de Adam de una persona normal y una con escoliosis [10]. ........... 16
Figura 8. Método de Cobb [3]....................................................................................................... 17
Figura 9. Metodo deTidestrom [3]. ............................................................................................... 18
Figura 10. Bloques que conforman el proyecto (Autores). ........................................................... 19
Figura 11. Método deCobb, donde la curva pertenece a un circulo [3]. ....................................... 21
Figura 12. Diseño CAD de la estructura física (Autores). ............................................................ 22
Figura 13. Diseño CAD de la segunda parte del dispositivo (Autores). ....................................... 23
Figura 14. Distribución de pistas para la primera parte del dispositivo (Autores). ...................... 23
Figura 15. Distribución de las pistas de la segunda parte (Autores). ............................................ 24
Figura 16. Tabla de mediciones individual, usuario de prueba 1033784735 (Autores). .............. 25
Figura 17. Tabla de personas registradas con historial de mediciones (Autores). ........................ 26
Figura 18. Tabla de personas registradas para uso del dispositivo (Autores). .............................. 26
Figura 19. Diagrama de navegación en la página web (Autores). ................................................ 27
Figura 20. Inicio de la página donde permite revisar el historial individual de mediciones realizadas
(Autores). .............................................................................................................................. 28
Figura 21. Inicio de sesión en la pestaña de consulta (Autores). .................................................. 29
Figura 22. Historial de consultas (Autores). ................................................................................. 29
Figura 23. Entrada para nueva medición (Autores). ..................................................................... 30
Figura 24. Historial de mediciones realizadas y datos en tiempo real de la consulta a ingresar
(Autores). .............................................................................................................................. 30
Figura 25. Pestaña Acerca con información del desarrollo del dispositivo (Autores).................. 31
Figura 26. Interfaz de configuración del dispositivo (Autores). ................................................... 32
Figura 27. Escanear redes (Izquierda), Entrada de una red y su contraseña (derecha) (Autores). 33
Figura 28. Diagrama de bloques del NodeMCU (Autores). ......................................................... 34
Figura 29. Conexión de los sensores US-100 y el NodeMCU (Autores). .................................... 35
Figura 30. Diagrama de bloques de la board de desarrollo kl25z (Autores). ............................... 36
Figura 31. Componentes del modulo de escoliosis (Autores). ..................................................... 36
Figura 32. Módulo de medición de escoliosis (Autores). ............................................................. 37
Figura 33. Proceso de linealización utilizando la herramienta de Microsotf Excel...................... 38
Figura 34.Dispositivo final, (a) Dispositivo para el diagnóstico de IL e IL vista lateral, (b)
Dispositivo para el diagnóstico de IL e IL vista frontal, (c) Dispositivo para diagnóstico de
ángulo de escoliosis (Autores). ............................................................................................. 39
Figura 35. Imágenes tomadas durante la medición de algunas personas (Autores). .................... 40
1
1. Introducción
Las desviaciones en la columna vertebral son frecuentes, aproximadamente 2% de la
población general [1] padece de escoliosis, casos particulares como la escoliosis infantil
(0-3años) se encuentra entre 0.5%-5%, la juvenil (3-10años) de 7%-10.5% y la adolecente
es del 89% [2]. La escoliosis es la desviación lateral de la línea vertical normal de la
columna vertebral, por lo general es mayor a 10 grados, se presenta una deformación
tridimensional rotando en los tres planos, sagital, frontal y axial. Otros tipos de
desviaciones como la lordosis que se presenta en los segmentos cervicales y lumbares con
respecto al plano sagital [3], y la cifosis es la desviación anormal de la columna torácica
[4].
Técnicas para el diagnóstico de estas patologías son clínicas y de procedimientos subjetivos
los cuales arrojan resultados dependientes del especialista que realice el procedimiento,
técnicas de exploración clínica como “Valoración de la reductibilidad de la curva cifótica”,
“Test de flexión del tronco con observación lateral”, “Exploración de la sedestación
asténica” y “Test de flechas sagitales” [5], son de ejecución clínica, es decir, en un
consultorio y requiere realizar posiciones anatómicas definidas por el método para
determinar alguna anomalía visual o realizar mediciones con dispositivos como el
escoliometro de Bunell o el inclinometro de burbuja.
Otras técnicas más avanzadas son los rayos X, estas permiten mejores resultados, ya que
por medio de radiografías y procedimientos como el Método de Ferguson-Risser-Von
Lackum, Método de Cobb, Método de Tideström, Método de Lindahl, Ángulo de
inclinación de la primera costilla de Mintz [3], entre otros; esta técnica de radiación
electromagnética tiene efectos secundarios negativos provocando algún cáncer en los
huesos por la radiación recibida [6].
La Universidad Distrital en los últimos años viene impulsando y trabajando en el desarrollo
en el campo de la Bioingeniería, y en particular el grupo de investigación DIGITI bajo la
modalidad de investigación e innovación, dirige proyectos encaminados en este campo.
En este documento, se muestran los resultados del diseño, elaboración e implementación
de un Dispositivo para el diagnóstico de desviaciones de la columna vertebral, basado en
el método clínico de flechas sagitales para la identificación del índice de desviación
lordotico y cifotico, y el test de Adams para el grado de desviación correspondiente a la
escoliosis, junto con su plataforma Web para gestionar el historial de mediciones realizadas
en las diferentes personas y llevar el seguimiento de la patología.

2
1.1. Planteamiento del problema
La escoliosis es la desviación lateral de la columna vertebral, en Colombia el diagnóstico
de esta enfermedad se realiza a través de manera subjetiva y tardía a causa del poco
desarrollo de tecnologías en este ámbito para la prevención de enfermedades degenerativas,
como lo son estos tipos de desviaciones de la columna vertebral. Los dispositivos que se
utilizan son análogos y sencillos que brindan relativamente una guía a los médicos que
clasifican y determinan el nivel de la enfermedad presente en el paciente. En el año 2017
en Colombia, estimaciones de la Sociedad Colombiana de Cirugía Ortopédica y
Traumatológica [7], la población colombiana se ve aproximadamente afectada en un 2%,
esta cifra tiende a aumentar a causa de malas posturas, mal manejo de cargas, problemas
genéticos o en algunos casos la falta o carencia de calcio en la alimentación, llegando a
causar complicaciones como la perdida de motricidad, enfermedades respiratorias u otras
enfermedades. En técnicas como la radiografía a través de rayos X, se tiene mejores
resultados en el diagnóstico, pero con efectos secundarios como el cáncer por la radiación
recibida en los análisis [6]. Por ello surge la necesidad de innovación y desarrollo
tecnológico en el campo de la medicina para suplir con esta situación.
3
1.2. Justificación
Mediante el diseño, desarrollo, validación e implementación de este proyecto, se generó
una herramienta que permite diagnosticar desviaciones en la columna vertebral. Este
aparato puede diagnosticar la desviación de la columna en medio de una consulta, brigada
de salud, y/o en cualquier lugar que tenga conexión a internet y eléctrica, añadiendo a esto
el diagnostico puede estar supervisado, revisado y/o apoyado por un médico especialista
en tiempo real desde otro lugar remoto por medio del aplicativo web desarrollado. En caso
particular de presentar una patología se dispondrá a proceder a un análisis medico más
puntual y concreto, métodos más robustos como el diagnostico por medio de radiografías
en conjunto con procesamiento de imagines.
Esta herramienta biomédica permite la detección de manera subjetiva con la posibilidad de
ser utilizado en campañas de salud, hospitales, colegios a modo de prevención. Añadiendo
a esto, esta herramienta biomédica sirve como base para nuevos desarrollos de tecnologías,
incentivando, promoviendo e impulsando el desarrollo de tecnología en la prevención de
enfermedades degenerativas, con el objetivo de aportar a la salud de diversas personas y
generar un país de innovación.
4
1.3. Objetivos
1.3.1. General.
Diseñar e implementar un dispositivo electrónico que determine el grado/índice de
desviación de la columna vertebral en una persona.
1.3.2. Específicos.
Diseñar y construir la estructura física del dispositivo ajustable a la talla de las personas a
examinar, junto con el sistema electrónico para la adquisición de datos desde los sensores
de distancia e inclinación.
Desarrollar una interfaz web que permita la visualización de los datos obtenidos del
dispositivo.
Almacenar el historial de mediciones en una base de datos, para llevar un seguimiento
sobre los pacientes examinados mediante el dispositivo.
5
2. Marco de referencia
2.1. Estado del arte
Para la detección de enfermedades degenerativas, como las desviaciones (escoliosis, cifosis
y lordosis) que pueden presentar la columna humana, se tienen técnicas clínicas que
permiten una revisión y un diagnostico con la enfermedad asociada, procedimientos tales
como por exploración, palpación y cuantificación de curvas [8] permiten un diagnóstico
clínico primario, otras técnicas son por medio de estudios radiográficos que arrojan mejores
resultados pero con consecuencias secundarias.
Los avances y desarrollos tecnológicos han llegado al área de la medicina con el desarrollo
de dispositivos para el análisis y diagnóstico de estas patologías, como la implementación
de un sistema de equilibrio con acelerómetros [9], donde analizan la escoliosis a partir de
la realización de inclinación pélvica anterior, posterior, izquierda y derecha del paciente, y
con ello se determina la relación de la escoliosis y su relación con la rotación axial de la
pelvis. En otro proyecto igualmente implementaron acelerómetros y adicional a ello un
encoder con el fin de obtener un modelado 3D de ángulos de Cobb, realizan un barrido de
la columna vertebral con el dispositivo, y obteniendo longitudes con el encoder y
rotaciones verticales con los datos de los acelerómetros, permitieron realizar el modelo en
3d de la columna a examinar, obteniendo resultados con un error entre 1.6% y 1.4% [10].
Ahora bien, otras técnicas donde por medio de una cámara de profundidad [11], se
determinaron varios valores de longitud, y ángulo de diferentes partes de una persona, se
identifican articulaciones del cuerpo para calcular y encontrar valores que puedan definir
el equilibrio del cuerpo, siguiendo una metodología similar utilizada en la topografía de
Moire. Una estrategia similar fue implementada por [12] donde utilizan topografía de
superficie, con el fin de predecir el tipo de curvatura de escoliosis basado en el análisis
desarrollado a partir de digitalizadores InSpeck. Como resultado obtuvieron una predicción
del 72.2%, demostrando la factibilidad del procedimiento.
Otro sistema no invasivo desarrollado es el dispositivo ScolioScan [13] el cual está
destinado a la evaluación de la escoliosis en clínicas mediante el uso de imágenes coronales
de la columna vertebral generadas por un método de proyección de imagen por ultrasonidos
3D. El dispositivo fue comparado con los resultados calculados a través de radiografías por
el ángulo de Cobb demostrando que es confiable para medir desviaciones en la columna.
En el caso particular de la detección de la cifosis, se implementan técnicas de diagnóstico
de manera indirecta, ya que por medio del dispositivo desarrollado nombrado en español
“zapatos inteligentes” [14], el dispositivo cuenta con 8 resistencias de detección de fuerza
ubicados de tal manera para recopilar datos de 8 prominencias óseas, con estos datos
obtenidos utilizan una técnica de Cascade Neural Networks (Redes Neuronales en cascada)
e identifican el patrón de marcha asociado a la cifosis. Validando el proceso mediante la
FFT (Transformada Rápida de Fourier) tiene un 98% de rendimiento, de esta manera se
considera robusto para ayudar a corregir la postura al caminar de los pacientes.
6
Otra opción que ha generado la tecnología es la ayuda de algoritmos, que por medio de las
radiografías analizadas por un computador programado se puede determinar un
diagnóstico, eliminando así los errores asociados con la interpretación de los médicos [15].
No solamente se encuentran dispositivos desarrollados para el diagnóstico de estas
enfermedades degenerativas, también se cuenta con dispositivos pensados para el
seguimiento, control y corrección de la escoliosis, cifosis y lordosis. Diseñó de un sistema
de monitoreo [16], el cual permite la medición y monitorización de la postura de un
paciente, con el fin de determinar su progreso en la desviación de su columna. Para ello
implementaron, sensores electromagnéticos y acelerómetros. Al tomar los datos el sistema
proporciona retroalimentación para permitir la corrección de la postura del paciente.
Otro dispositivo para el monitoreo de pacientes con escoliosis es un Smart Brace [17], un
dispositivo para controlar el tratamiento ortopédico en pacientes con escoliosis, para ello
implementaron una monitorización con placas multimodales, las cuales permiten obtener
datos de inclinación por medio de acelerómetros y datos de presión por medio de sensores
distribuidos en la placa. Bajo estas medidas, el diseño del algoritmo se presentó en dos
partes, la primera en desarrollar los test de caminar, correr, sentarse y subir las escaleras,
seguido del estudio de los datos en las diferentes pruebas y actividades físicas.
Técnicas alternativas utilizadas en el dispositivo ScolioScan, como el barrido laser
implementado [18] utilizan una triangulación de laser dinámica, es decir, se tiene una
emisión de luz, esta rebota en el objeto a medir, y con el reflejo el haz de luz regresa a los
foto detectores, conociendo la distancia de la emisión de luz y la detección en los fotos
detectores y el ángulo formado se realiza un cálculo de coordenadas y con ello de determina
un escáner en 3d y de esta manera se lleva un control sobre las desviaciones presente en la
columna.
Dispositivo de corrección portable con retroalimentación que mediante la colocación en la
parte de atrás de los pacientes, en la espalda, permite monitorear los grados de inclinación
que se encuentre asociados a la postura, de esta forma se compara con el ángulo en
particular establecido de 15 grados y en caso de sobrepasar este valor la alarme emite un
sonido indicando corregir el balance de la persona [19]. Otros dispositivos similares con la
misma metodología, de medición e indicación para corrección de la postura [20] son
desarrollados bajo la misma metodología [21] que básicamente son corsé para evaluar
diferentes variables como presión e inclinación asociadas a la postura que se encuentre la
persona y así indicar mediante alarmas la corrección de esta o llevar el monitoreo y
almacenamientos de estos datos en gráficas para analizar el comportamiento de la postura
en los pacientes.
7
3. Marco Teórico
3.1. Columna vertebral
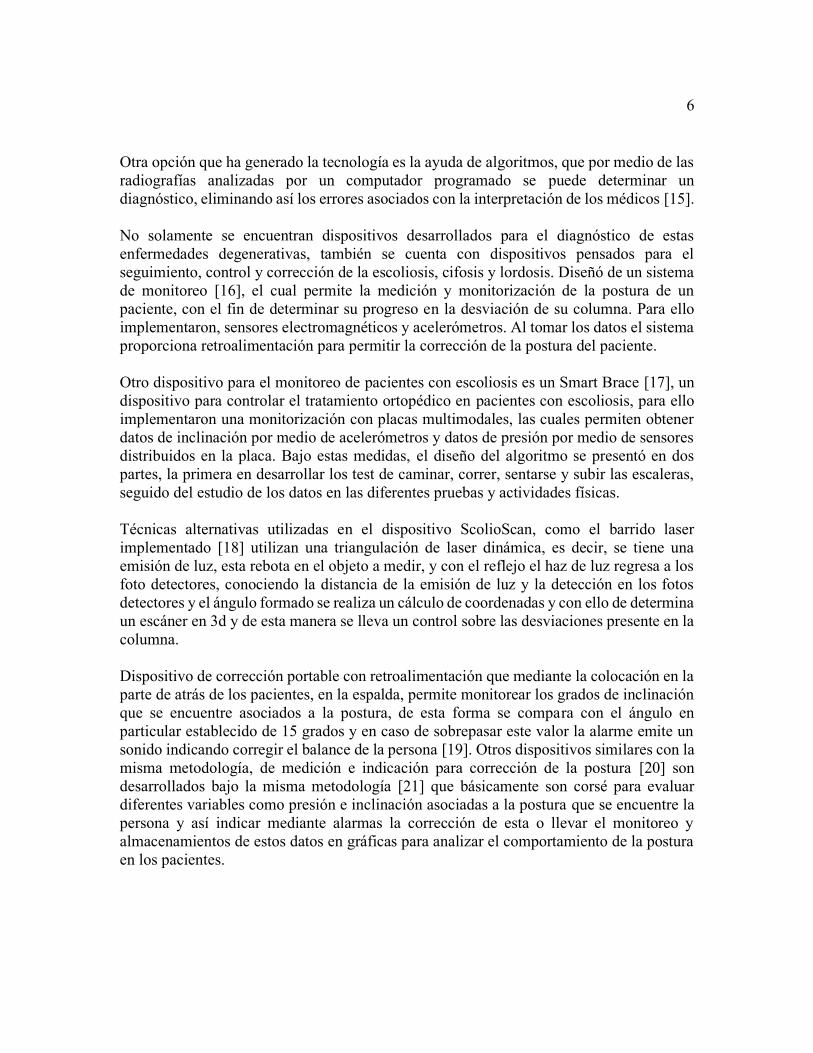
La columna vertebral es un tallo longitudinal óseo, resistente y flexible, situado en la parte
media y posterior del tronco, que se extiende desde la cabeza, la cual sostiene, hasta la
pelvis, que la soporta. Envuelve y protege la médula espinal, que está contenida en el
conducto vertebral (conducto raquídeo). La columna vertebral se compone de elementos
óseos superpuestos denominados vértebras.
El número de vértebras se considera bastante constante: de 33 a 35, divididas en 24
vértebras presacras (7 cervicales, 12 torácicas y 5 lumbares), 5 vértebras sacras y de 3 a 5
vértebras coccígeas. Sin embargo, estas cifras están sujetas a frecuentes variaciones, ya que
se han descrito solamente en el 65 % de los individuos. Las variaciones numéricas son más
frecuentes a medida que se desciende desde las vértebras cervicales hasta el cóccix.
Mientras que, de forma casi constante, se observan 7 vértebras cervicales, las vértebras
torácicas oscilan entre 11 y 13, las vértebras lumbares entre 4 y 6, las vértebras sacras entre
4 y 6 y las vértebras coccígeas entre 3 y 5 [22].
Figura 1. Columna vertebral [22]
Columna cervical
Columna torácica
Columna lumbar
Sacro
Cóccix
8
3.2. Enfermedades ortopédicas
3.2.1. Escoliosis
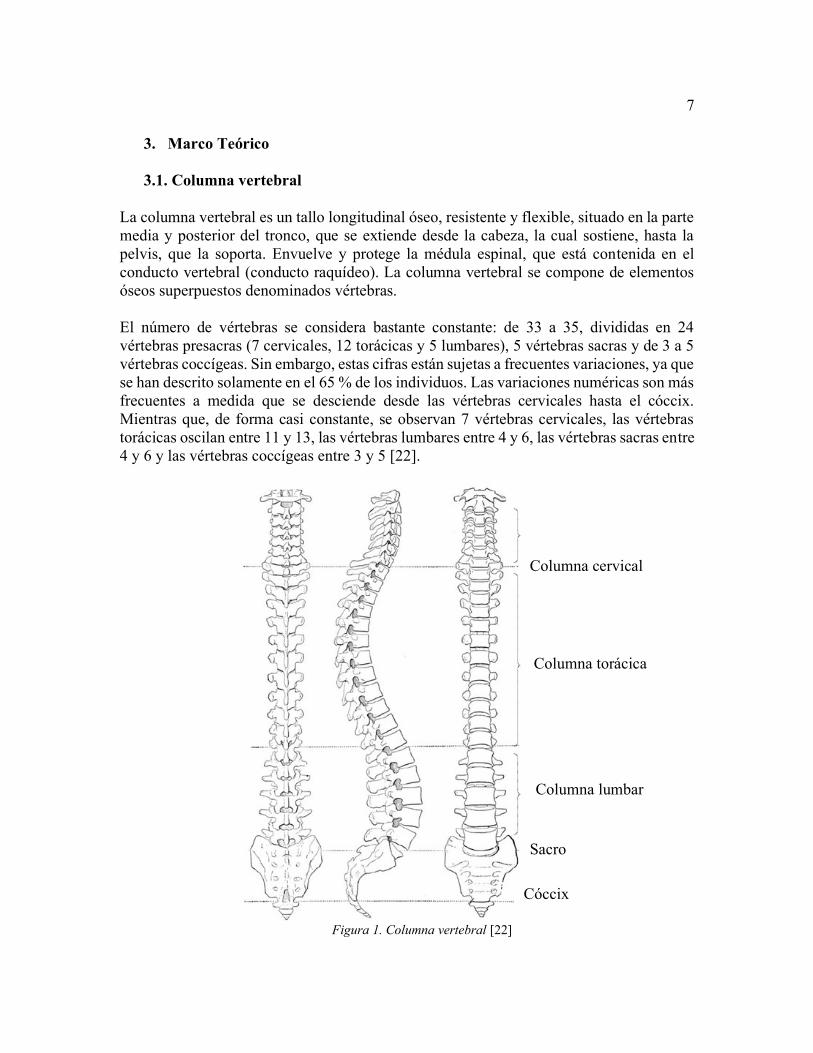
Se define como la desviación lateral de la línea vertical normal de la columna vertebral,
por lo general es mayor a 10 grados, como se puede apreciar en la figura 9. Esta curva
lateral de la comuna vertebral está directamente relacionada con la rotación de las vértebras
dentro de la curva, es decir, se produce una deformación tridimensional [23]. Esta
deformidad compleja representa un movimiento anormal en tres planos:
1. Extensión intervertebral en el plano sagital, que se conoce como lordosis del
segmento escoliotico.
2. Inclinación intervertebral lateral en el plano frontal
3. Un componente rotatorio en el plano axial.
Figura 2. Radiografía posteroanterior de la columna toracolumbar de una niña de 13 años que
muestra escoliosis torácica derecha de 45 grados [24].
Esto resulta en la torsión de la columna vertebral, con la anomalía más significativa
localizada en la región apical. A medida que la deformidad empeora, se desarrollan
cambios estructurales en las vértebras y la caja torácica. Las relaciones entre los órganos
intratorácicos y abdominales pueden distorsionarse a medida que la deformidad se agrava,
pero rara vez se comprometen las funciones de los órganos [24].
9
3.2.2. Tipos de escoliosis
Escoliosis en adultos: curvatura espinal presente después de la madurez esquelética como
resultado de cualquier causa.
Escoliosis congénita: escoliosis causada por anomalías óseas de la columna vertebral que
están presentes al nacer. Las anomalías se clasifican como falla de formación vertebral o
falla de segmentación.
Escoliosis histérica: deformidad no estructural de la columna vertebral que es una
manifestación de un trastorno psicológico.
Escoliosis idiopática: curvatura vertebral estructural, cuya causa no se ha establecido
definitivamente.
3.2.3. Tipos de curvas escolióticas
Curva cervicotorácica: cualquier curvatura espinal en la cual el vértice está en C7 o T1.
Curva compensatoria: curva secundaria ubicada arriba o debajo del componente
estructural que se desarrolla para mantener la alineación normal del cuerpo.
Curva doble: escoliosis en la que dos curvas laterales están presentes en la misma sección
de la columna vertebral.
Doble curva principal: escoliosis en la que están presentes dos curvas estructurales,
generalmente de tamaño y rotación similares.
Curva torácica doble: escoliosis con una curva torácica superior estructural; una curva
torácica inferior más grande y más deformante; y una curva lumbar relativamente no
estructural.
Citoscopia: vista como un aumento de la espalda en una radiografía lateral, esta condición
puede representar una verdadera deformidad cifótica (como ocurre en algunas afecciones
patológicas), o puede representan una rotación tan excesiva de la columna vertebral que
una radiografía lateral refleja la deformidad escoliótica. (En la escoliosis idiopática, no se
produce una verdadera deformidad cifótica).
Lordoscoliosis: escoliosis estructural asociada con aumento del swayback, el cual hace
referencia a la inclinación en la postura de una persona como si estuviese cargando algo
pesado en la espalda [25], o pérdida de cifosis normal dentro de la curva medida; Casi
siempre está presente en la escoliosis idiopática.
10
Curva lumbar: curvatura de la columna vertebral en la que el vértice se encuentra entre
LI y L4.
Curva lumbosacra: curvatura de la columna vertebral en la cual el vértice está en L5 o
por debajo.
Escoliosis neuromuscular: escoliosis causada por un trastorno neurológico del sistema
nervioso central o músculo.
Curva no estructural (funcional): Curvatura que no tiene una deformidad fija y puede
ser de naturaleza compensatoria. La curva puede ser el resultado de una discrepancia en la
longitud de la pierna (en cuyo caso desaparece cuando el paciente está en posición supina),
mala postura, espasmo muscular o alguna otra causa.
Curva primaria: La primera curva o la más temprana presente.
Curva estructural: segmento de la columna que tiene una curvatura lateral fija.
Curva torácica: curvatura de la columna vertebral en la cual el vértice está entre T2 y T11.
Curva toracolumbar: curvatura de la columna vertebral en la que el vértice se encuentra
en T12, L1 o en el espacio intermedio T12-L1.
3.2.4. Cifosis
Se llama cifosis a la curvatura anormal en la columna torácica. La cifosis postural es el
resultado de una mala postura. Los adolescentes y los adultos jóvenes por lo general tienden
a tener esta condición mientras que están parados o en el momento en que se están
sentándose, provocando que la espina dorsal se arquee hacia adelante. En la figura 10 se
muestra una columna vertebral con cifosis [4].
Figura 3. Columna con cifosis [3].
11
Cuando un médico lo mide en una radiografía, el rango normal de cifosis es bastante
amplio, entre 20 y 50 grados. Sin embargo, cuando la cifosis es mayor de 50 grados, se
vuelve fácil de ver y se considera anormal. La cifosis es más frecuente en mujeres mayores,
como resultado de la osteoporosis [26].
3.2.5. Tipos de cifosis y causas
Cifosis postural: Es el tipo más frecuente de cifosis. Suele aparecer durante la
adolescencia y es más común en las niñas que en los niños. La cifosis postural puede ocurrir
cuando los huesos y los músculos se desarrollan de forma anormal durante el proceso de
crecimiento, posiblemente debido a la adopción de posturas incorrectas y/o a la tendencia
a no ir con la espalda derecha. La cifosis postural puede causar leves molestias, pero es
muy raro que provoque problemas en etapas posteriores de la vida.
La enfermedad de Scheuermann: suele aparecer en la adolescencia, sobre todo durante
la etapa de crecimiento. Se desconoce sus causas, pero se suele dar por familias. La
enfermedad de Scheuermann hace que las vértebras tengan forma de cuña, en vez de la
típica forma rectangular, cuando se mira la columna vertebral de perfil en una radiografía.
Es un poco más frecuente en los niños que en las niñas.
Cifosis congénita: Esta ocurre cuando la columna vertebral se desarrolla de forma anormal
mientras el bebé se encuentra dentro del vientre materno. Formada a partir de la fusión de
varias vértebras y/o que los huesos se forman incorrectamente. Este tipo de cifosis se puede
agravar a medida que el niño crece. Es importante evaluar a un bebé o a un niño con cifosis
congénita porque pueden presentar otros problemas traumatológicos, así como
anormalidades en el corazón o en los riñones [27].
Trastornos paralíticos: Las condiciones que causan la parálisis pueden llevar a la cifosis.
La cifosis que resulta es un resultado secundario de la parálisis. El desarrollo de la cifosis
en estos casos es gradual en lugar de repentino.
Postraumático: La lesión de la columna vertebral puede llevar a una cifosis progresiva y
problemas nerviosos en la columna vertebral. Cuando el trauma es una fractura vertebral
en la columna torácica o lumbar, el 90% de las veces se produce un cierto grado de cifosis.
El tratamiento para la cifosis postraumática puede incluir refuerzo o cirugía.
Cifosis postquirúrgica: La cifosis se puede desarrollar después de la cirugía de la columna
vertebral para corregir otros problemas. Esto suele ocurrir cuando la cirugía realizada no
se cura como está previsto. Por ejemplo, una fusión de la columna vertebral puede no sanar.
La fusión inestable puede hacer que la columna vertebral se colapse en una cifosis. Los
ligamentos de la columna vertebral pueden no sanar lo suficientemente fuerte como para
soportar las vértebras y permitir que la columna forme una curva cifótica.
12
Cifosis degenerativa: También hay casos de cifosis causados por degeneración o desgaste
de la columna lumbar (parte inferior). Con el tiempo, el proceso degenerativo puede
ocasionar: colapso del disco intervertebral, cambios en la forma de las vértebras y
debilitamiento de los ligamentos que sostienen la columna vertebral. Esto puede resultar
en el desarrollo gradual de una cifosis durante muchos años. Una vez que la cifosis
comienza a formarse, empeora debido a que el desequilibrio de las fuerzas aumenta
continuamente el desgaste.
Otras causas de la cifosis: Diferentes tipos de enfermedades sistémicas pueden hacer que
se desarrolle una cifosis a lo largo del tiempo. Estas afecciones incluyen: infección en la
columna vertebral, cáncer o tumores que afectan la columna vertebral y diferentes tipos de
artritis sistémica. Este tipo de cifosis es causado por cambios en la columna vertebral
provocados por la inflamación del tejido en el área que rodea la columna torácica. La cifosis
también puede desarrollarse en personas que fueron tratadas por una enfermedad maligna
(cancerosa) de la infancia por radiación al esqueleto axial [28].
3.2.6. Lordosis
La lordosis se conoce como la curvatura en el plano sagital de los segmentos cervicales y
lumbar de la columna vertebral y de la concavidad posterior [3].
Figura 4. Radiografía de una niña de 12 años con un deslizamiento de grado III y ángulo de
deslizamiento cifótico, pero una columna vertebral y pelvis equilibradas [24].
13
3.2.7. Tipos de lordosis
Natural: se refiere al grado de curvatura que está dentro de los parámetros normales, la
cual es así para cargar con el peso del cuerpo.
Rectificación lumbar: Cuando se produce una pérdida de la curva normal. Tiende a
ocasionar dolores lumbares y la persona afectada puede tener una postura arqueada.
Hiperlordosis: Se entiende como una acentuación de la curvatura normal de la columna.
También se tienen tipos dependiendo de la zona de la espalda afecta:
Lordosis lumbar: La cual afecta a la zona baja de la espalda (lumbares) y es el tipo más
común que se encuentran en los pacientes.
Lordosis cervical: es la curva en las vértebras en la zona del cuello. Si existe una
desviación de la curva normal nos puede producir dolores [29].
3.3. Diagnóstico de escoliosis, lordosis y cifosis
3.3.1. Métodos clínicos
Exploración clínica
La exploración clínica de la columna vertebral se realiza con el paciente en ropa interior y
con buena iluminación en el ambiente. Durante la exploración clínica debe valorarse la
actitud postural general. Hay que tener en cuenta que el desarrollo de la postura está
sometido al influjo de factores hereditarios, familiares e individuales como edad, sexo,
constitución, hábitos posturales, patologías, ejercicio físico, aspectos psicológicos, etc.
Cifosis y lordosis:
Valores normales en cifosis: 20º-45⁰.
Valores normales en lordosis: 35º-50⁰.
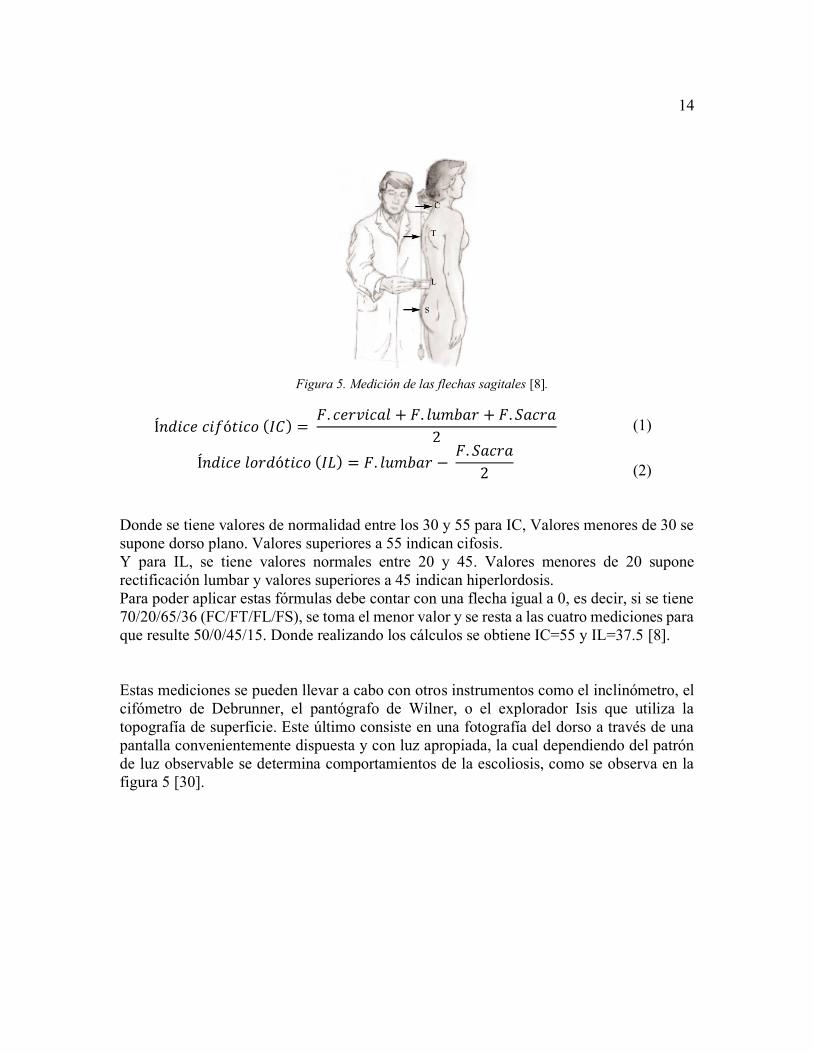
Flechas Sagitales
Se realizan midiendo cuatro distancias que se denominan flechas (F), entre diferentes
apófisis espinosas, con el hilo de la plomada. Para su medición se aproxima el hilo hasta el
primer punto de contacto con el raquis (generalmente en T7-T9 y/o en el inicio del pliegue
interglúteo (S2). Se miden las distancias existentes entre el hilo de la plomada con: apófisis
espinosa de C7 o prominens (flecha cervical); máxima convexidad del raquis dorsal (flecha
torácica que suele ser de valor cero); máxima concavidad de la zona lumbar (flecha lumbar)
y en el inicio del pliegue interglúteo (flecha sacra). Con estas cuatro distancias pueden
obtenerse dos índices que separarán a los individuos sanos del grupo que presenta sospecha
de presentar desalineación en el plano sagital. A continuación, se detalla la obtención de
estos índices y su interpretación en la figura 5 y ecuaciones (1) y (2):
14
Figura 5. Medición de las flechas sagitales [8].
Í𝑛𝑑𝑖𝑐𝑒 𝑐𝑖𝑓ó𝑡𝑖𝑐𝑜 (𝐼𝐶) = 𝐹. 𝑐𝑒𝑟𝑣𝑖𝑐𝑎𝑙 + 𝐹. 𝑙𝑢𝑚𝑏𝑎𝑟 + 𝐹. 𝑆𝑎𝑐𝑟𝑎
2 (1)
Í𝑛𝑑𝑖𝑐𝑒 𝑙𝑜𝑟𝑑ó𝑡𝑖𝑐𝑜 (𝐼𝐿) = 𝐹. 𝑙𝑢𝑚𝑏𝑎𝑟 − 𝐹. 𝑆𝑎𝑐𝑟𝑎
2
(2)
Donde se tiene valores de normalidad entre los 30 y 55 para IC, Valores menores de 30 se
supone dorso plano. Valores superiores a 55 indican cifosis.
Y para IL, se tiene valores normales entre 20 y 45. Valores menores de 20 supone
rectificación lumbar y valores superiores a 45 indican hiperlordosis.
Para poder aplicar estas fórmulas debe contar con una flecha igual a 0, es decir, si se tiene
70/20/65/36 (FC/FT/FL/FS), se toma el menor valor y se resta a las cuatro mediciones para
que resulte 50/0/45/15. Donde realizando los cálculos se obtiene IC=55 y IL=37.5 [8].
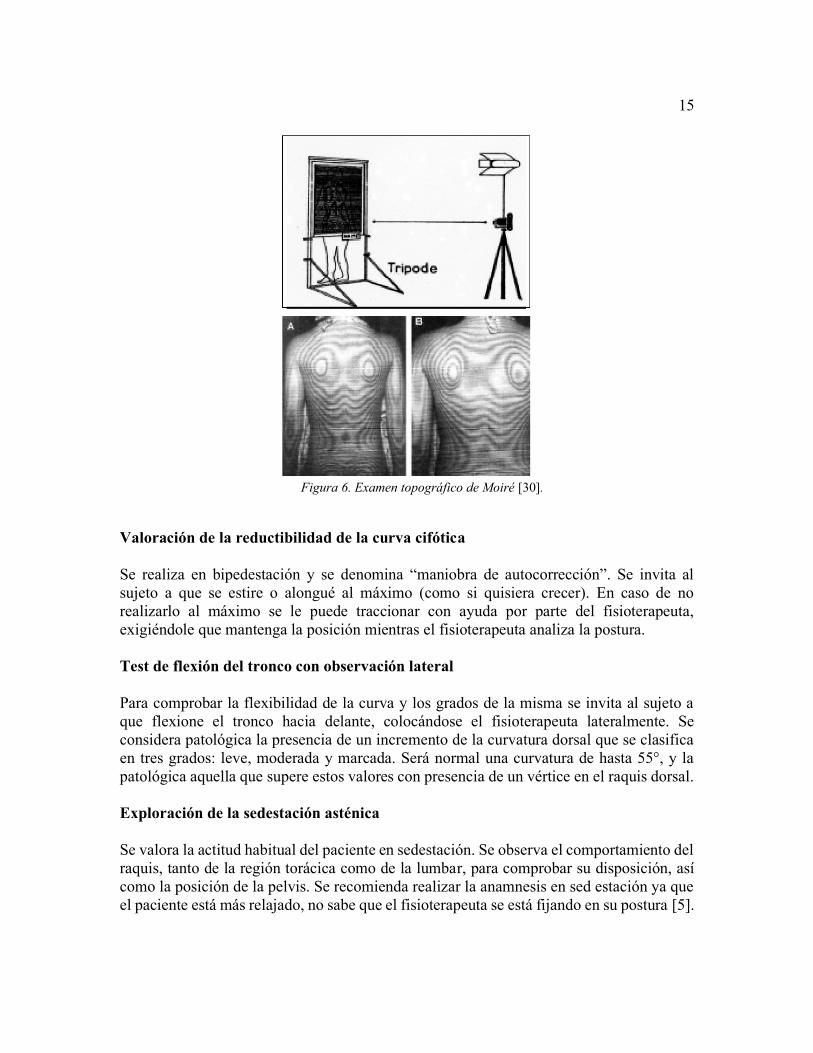
Estas mediciones se pueden llevar a cabo con otros instrumentos como el inclinómetro, el
cifómetro de Debrunner, el pantógrafo de Wilner, o el explorador Isis que utiliza la
topografía de superficie. Este último consiste en una fotografía del dorso a través de una
pantalla convenientemente dispuesta y con luz apropiada, la cual dependiendo del patrón
de luz observable se determina comportamientos de la escoliosis, como se observa en la
figura 5 [30].
15
Figura 6. Examen topográfico de Moiré [30].
Valoración de la reductibilidad de la curva cifótica
Se realiza en bipedestación y se denomina “maniobra de autocorrección”. Se invita al
sujeto a que se estire o alongué al máximo (como si quisiera crecer). En caso de no
realizarlo al máximo se le puede traccionar con ayuda por parte del fisioterapeuta,
exigiéndole que mantenga la posición mientras el fisioterapeuta analiza la postura.
Test de flexión del tronco con observación lateral
Para comprobar la flexibilidad de la curva y los grados de la misma se invita al sujeto a
que flexione el tronco hacia delante, colocándose el fisioterapeuta lateralmente. Se
considera patológica la presencia de un incremento de la curvatura dorsal que se clasifica
en tres grados: leve, moderada y marcada. Será normal una curvatura de hasta 55°, y la
patológica aquella que supere estos valores con presencia de un vértice en el raquis dorsal.
Exploración de la sedestación asténica
Se valora la actitud habitual del paciente en sedestación. Se observa el comportamiento del
raquis, tanto de la región torácica como de la lumbar, para comprobar su disposición, así
como la posición de la pelvis. Se recomienda realizar la anamnesis en sed estación ya que
el paciente está más relajado, no sabe que el fisioterapeuta se está fijando en su postura [5].
16
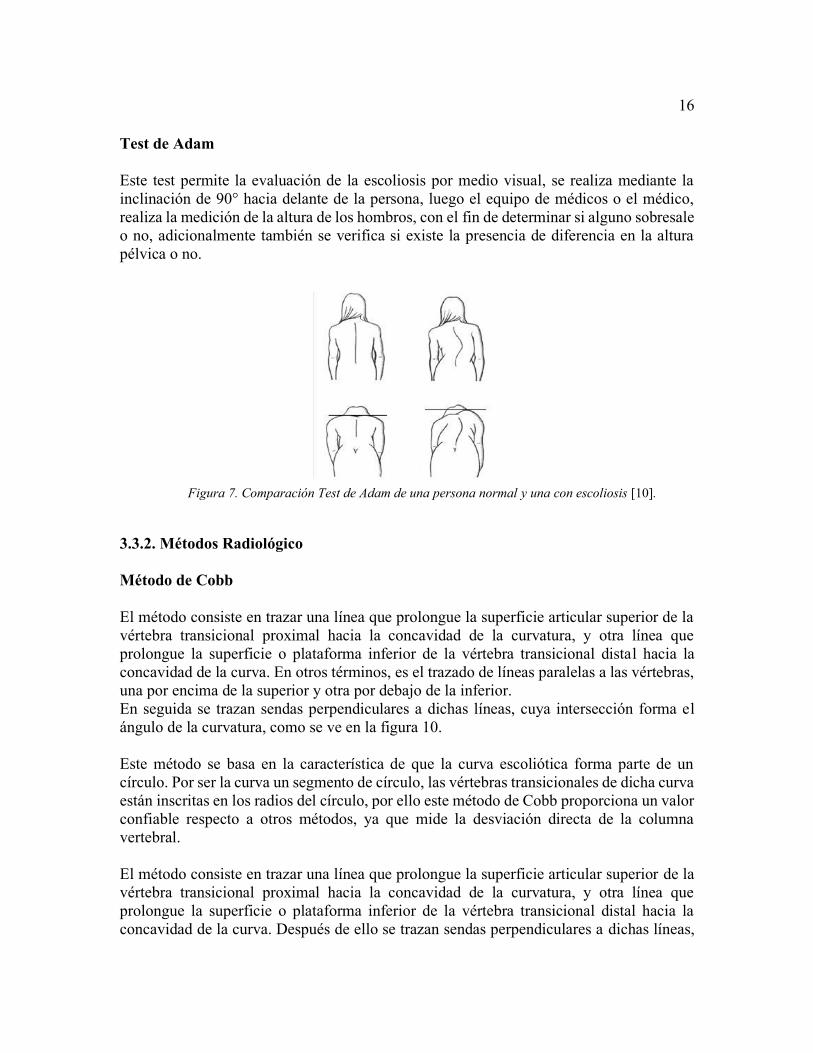
Test de Adam
Este test permite la evaluación de la escoliosis por medio visual, se realiza mediante la
inclinación de 90° hacia delante de la persona, luego el equipo de médicos o el médico,
realiza la medición de la altura de los hombros, con el fin de determinar si alguno sobresale
o no, adicionalmente también se verifica si existe la presencia de diferencia en la altura
pélvica o no.
Figura 7. Comparación Test de Adam de una persona normal y una con escoliosis [10].
3.3.2. Métodos Radiológico
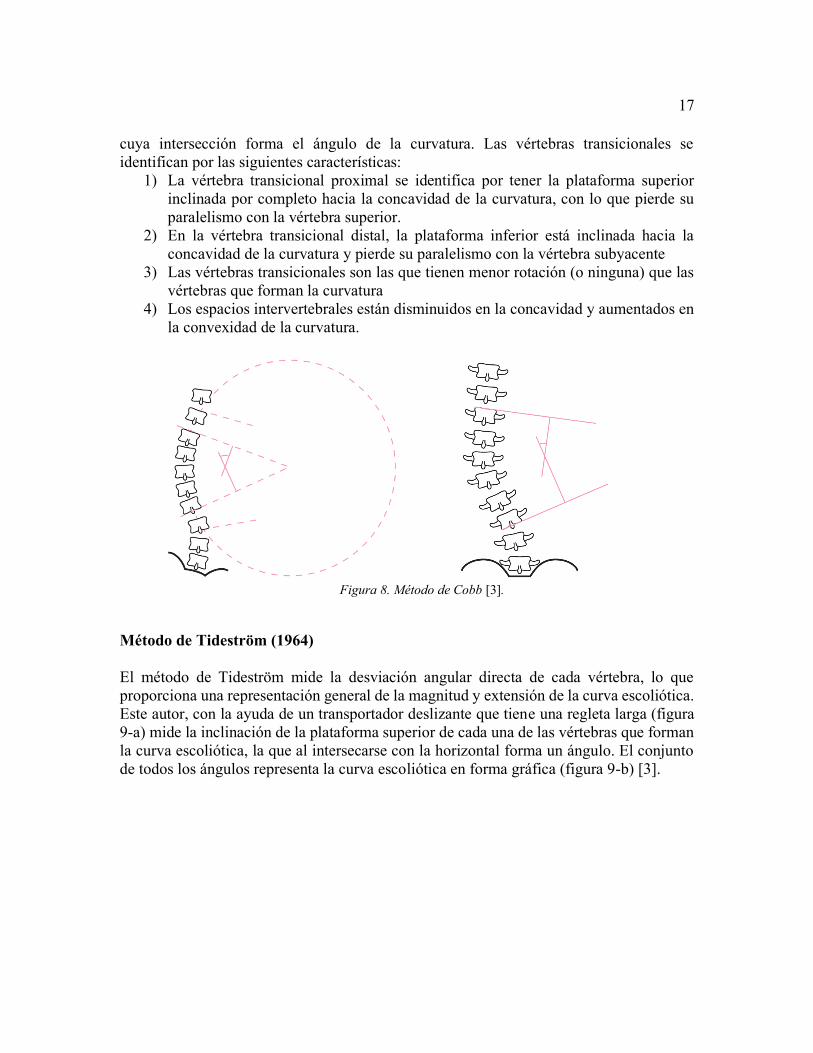
Método de Cobb
El método consiste en trazar una línea que prolongue la superficie articular superior de la
vértebra transicional proximal hacia la concavidad de la curvatura, y otra línea que
prolongue la superficie o plataforma inferior de la vértebra transicional distal hacia la
concavidad de la curva. En otros términos, es el trazado de líneas paralelas a las vértebras,
una por encima de la superior y otra por debajo de la inferior.
En seguida se trazan sendas perpendiculares a dichas líneas, cuya intersección forma el
ángulo de la curvatura, como se ve en la figura 10.
Este método se basa en la característica de que la curva escoliótica forma parte de un
círculo. Por ser la curva un segmento de círculo, las vértebras transicionales de dicha curva
están inscritas en los radios del círculo, por ello este método de Cobb proporciona un valor
confiable respecto a otros métodos, ya que mide la desviación directa de la columna
vertebral.
El método consiste en trazar una línea que prolongue la superficie articular superior de la
vértebra transicional proximal hacia la concavidad de la curvatura, y otra línea que
prolongue la superficie o plataforma inferior de la vértebra transicional distal hacia la
concavidad de la curva. Después de ello se trazan sendas perpendiculares a dichas líneas,
17
cuya intersección forma el ángulo de la curvatura. Las vértebras transicionales se
identifican por las siguientes características:
1) La vértebra transicional proximal se identifica por tener la plataforma superior
inclinada por completo hacia la concavidad de la curvatura, con lo que pierde su
paralelismo con la vértebra superior.
2) En la vértebra transicional distal, la plataforma inferior está inclinada hacia la
concavidad de la curvatura y pierde su paralelismo con la vértebra subyacente
3) Las vértebras transicionales son las que tienen menor rotación (o ninguna) que las
vértebras que forman la curvatura
4) Los espacios intervertebrales están disminuidos en la concavidad y aumentados en
la convexidad de la curvatura.
Figura 8. Método de Cobb [3].
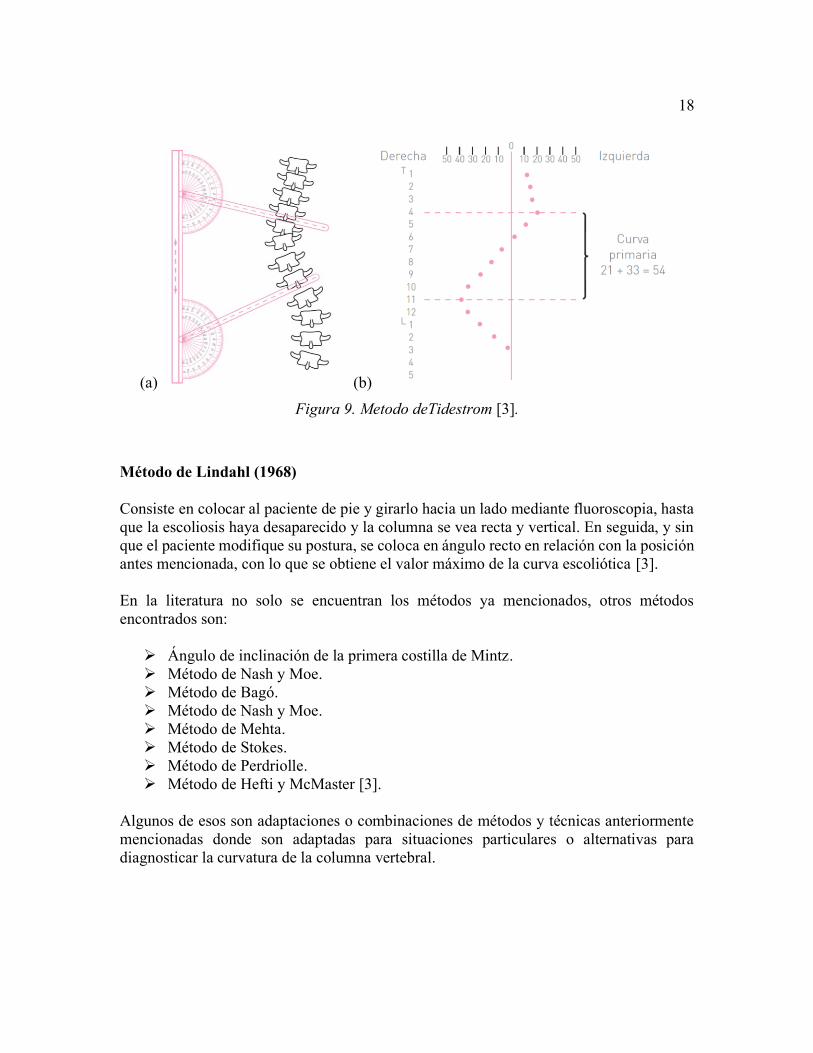
Método de Tideström (1964)
El método de Tideström mide la desviación angular directa de cada vértebra, lo que
proporciona una representación general de la magnitud y extensión de la curva escoliótica.
Este autor, con la ayuda de un transportador deslizante que tiene una regleta larga (figura
9-a) mide la inclinación de la plataforma superior de cada una de las vértebras que forman
la curva escoliótica, la que al intersecarse con la horizontal forma un ángulo. El conjunto
de todos los ángulos representa la curva escoliótica en forma gráfica (figura 9-b) [3].
18
(a) (b)
Figura 9. Metodo deTidestrom [3].
Método de Lindahl (1968)
Consiste en colocar al paciente de pie y girarlo hacia un lado mediante fluoroscopia, hasta
que la escoliosis haya desaparecido y la columna se vea recta y vertical. En seguida, y sin
que el paciente modifique su postura, se coloca en ángulo recto en relación con la posición
antes mencionada, con lo que se obtiene el valor máximo de la curva escoliótica [3].
En la literatura no solo se encuentran los métodos ya mencionados, otros métodos
encontrados son:
➢ Ángulo de inclinación de la primera costilla de Mintz.
➢ Método de Nash y Moe.
➢ Método de Bagó.
➢ Método de Nash y Moe.
➢ Método de Mehta.
➢ Método de Stokes.
➢ Método de Perdriolle.
➢ Método de Hefti y McMaster [3].
Algunos de esos son adaptaciones o combinaciones de métodos y técnicas anteriormente
mencionadas donde son adaptadas para situaciones particulares o alternativas para
diagnosticar la curvatura de la columna vertebral.
19
4. Metodología
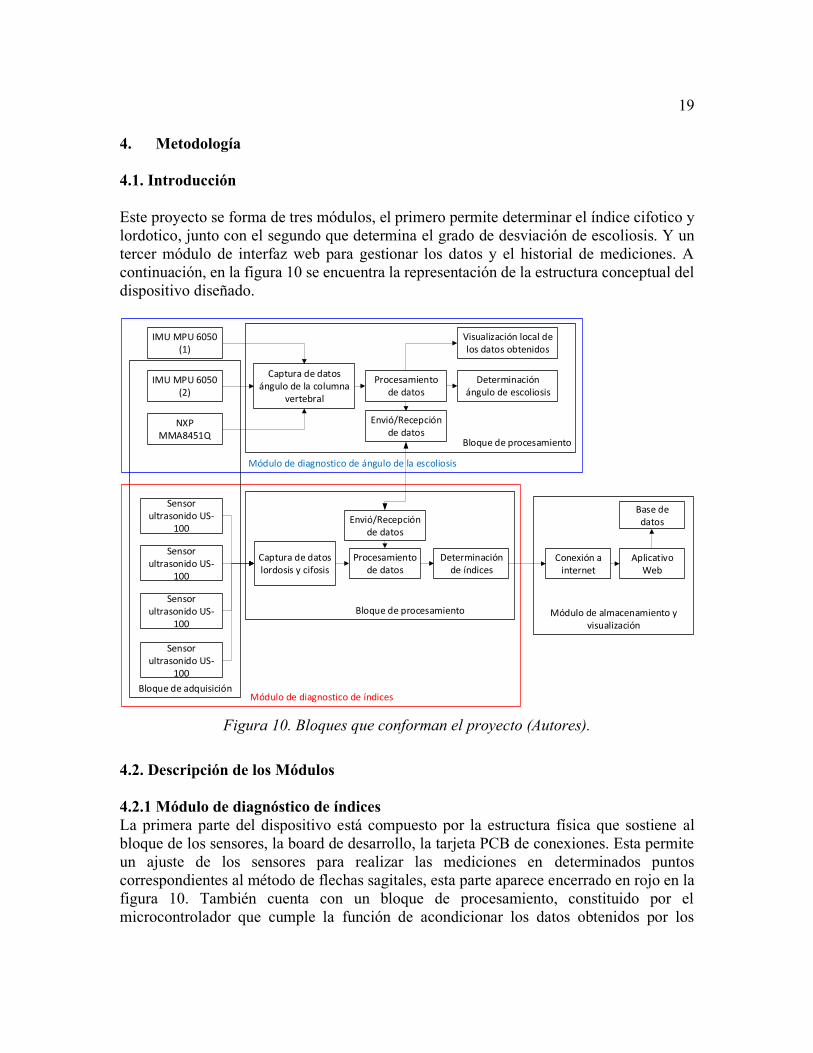
4.1. Introducción
Este proyecto se forma de tres módulos, el primero permite determinar el índice cifotico y
lordotico, junto con el segundo que determina el grado de desviación de escoliosis. Y un
tercer módulo de interfaz web para gestionar los datos y el historial de mediciones. A
continuación, en la figura 10 se encuentra la representación de la estructura conceptual del
dispositivo diseñado.
Módulo de diagnostico de índices
Módulo de diagnostico de ángulo de la escoliosis
Módulo de almacenamiento y visualización
Bloque de procesamiento
Bloque de adquisición
IMU MPU 6050 (1)
IMU MPU 6050 (2)
NXP MMA8451Q
Captura de datos ángulo de la columna
vertebral
Captura de datos lordosis y cifosis
Determinación de índices
Aplicativo Web
Base de datos
Procesamiento de datos
Conexión a internet
Sensor ultrasonido US-
100
Sensor ultrasonido US-
100
Sensor ultrasonido US-
100
Sensor ultrasonido US-
100
Determinación ángulo de escoliosis
Procesamiento de datos
Bloque de procesamiento
Envió/Recepción de datos
Envió/Recepción de datos
Visualización local de los datos obtenidos
Figura 10. Bloques que conforman el proyecto (Autores).
4.2. Descripción de los Módulos
4.2.1 Módulo de diagnóstico de índices
La primera parte del dispositivo está compuesto por la estructura física que sostiene al
bloque de los sensores, la board de desarrollo, la tarjeta PCB de conexiones. Esta permite
un ajuste de los sensores para realizar las mediciones en determinados puntos
correspondientes al método de flechas sagitales, esta parte aparece encerrado en rojo en la
figura 10. También cuenta con un bloque de procesamiento, constituido por el
microcontrolador que cumple la función de acondicionar los datos obtenidos por los

20
sensores, procesarlos, mostrarlos localmente y enviarlos al aplicativo web a través de la
conexión a internet.
4.2.2. Módulo de diagnóstico de ángulo de escoliosis
Este módulo está formado por 3 sensores los cuales 2 de ellos cumplen la función de medir
la desviación siguiendo el método de Cobb y de Tidestrom, y con el tercer sensor es
utilizado como referencia. Este módulo se comunica con el módulo anterior para recibir
los datos de los índices y mostrarlos localmente y de enviar el dato del ángulo de desviación
de escoliosis al aplicativo web para su gestión.
4.2.3. Módulo de almacenamiento y visualización
Esta constituido de un aplicativo web que tiene la interfaz de usuario para la visualización
de resultados, consultas y adicionar nuevas mediciones. Cuenta también con una base de
datos para guardar el historial de las mediciones realizada para cada persona examinada.
4.3. Método utilizado
La metodología en que se basa la primera parte o módulo del dispositivo es a través del
método de Flechas Sagitales, ya que este como se mencionó en el apartado teórico, es de
implementación clínica basada en 4 mediciones en puntos determinados, en bipedestación
con el sujeto de perfil, se coloca el dispositivo que permita medir la distancia entre este y
las prominencias óseas.
• Flecha cervical: a la altura de la apófisis espinosa de C7.
• Flecha torácica: a la altura del borde medial de ambas escápulas T7-T9.
• Flecha lumbar: al punto de máxima concavidad lumbar.
• Flecha sacra: al inicio del pliegue interglúteo [5].
Í𝑛𝑑𝑖𝑐𝑒 𝑐𝑖𝑓ó𝑡𝑖𝑐𝑜 (𝐼𝐶) = 𝐹. 𝑐𝑒𝑟𝑣𝑖𝑐𝑎𝑙 + 𝐹. 𝑙𝑢𝑚𝑏𝑎𝑟 + 𝐹. 𝑆𝑎𝑐𝑟𝑎
2
(3)
Í𝑛𝑑𝑖𝑐𝑒 𝑙𝑜𝑟𝑑ó𝑡𝑖𝑐𝑜 (𝐼𝐿) = 𝐹. 𝑙𝑢𝑚𝑏𝑎𝑟 − 𝐹. 𝑆𝑎𝑐𝑟𝑎
2 (4)
Para este método se debe tener una flecha igual a cero, por lo general suele ser la Flecha
Cervical o la Fecha lumbar, cuando alguna de estas no es igual a cero, se resta la menor
medida entre estas dos, a todas las demás medidas de las otras flechas cervicales. Como
este dispositivo no hará contacto con la piel de las personas, se programa una serie de
sentencias con el fin de cumplir con esta condición para poder aplicar el método y las
ecuaciones (3) y (4) anteriormente mencionadas.
21
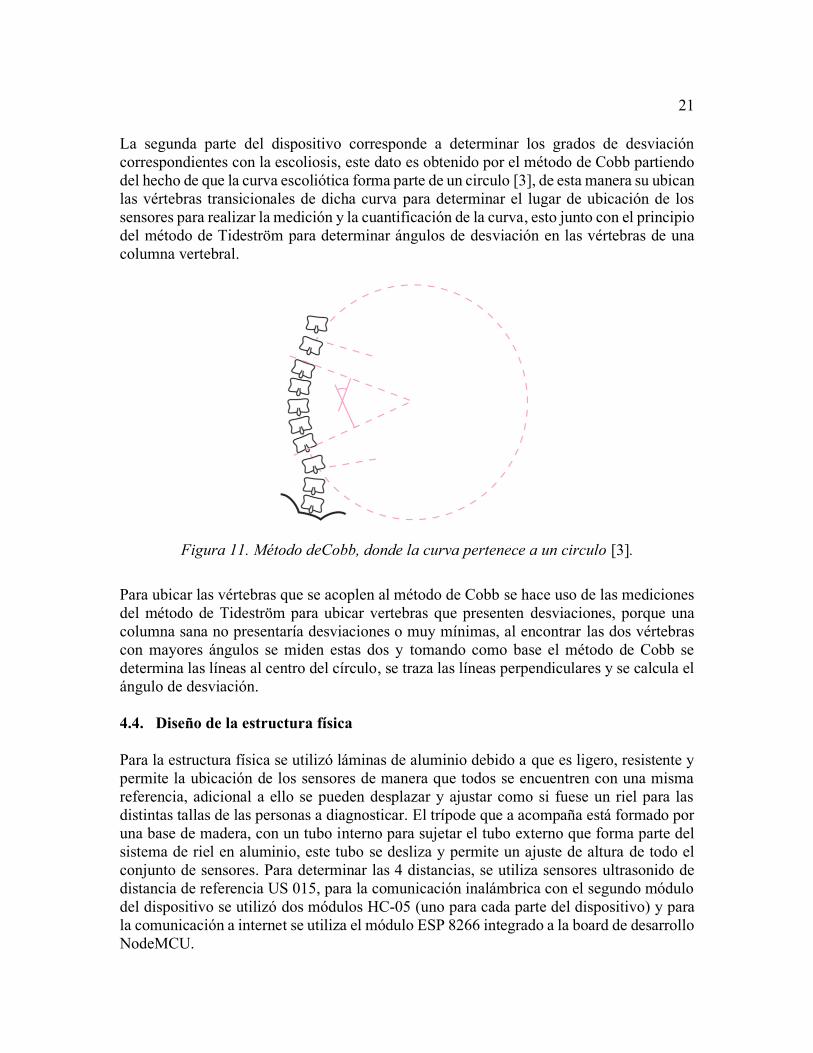
La segunda parte del dispositivo corresponde a determinar los grados de desviación
correspondientes con la escoliosis, este dato es obtenido por el método de Cobb partiendo
del hecho de que la curva escoliótica forma parte de un circulo [3], de esta manera su ubican
las vértebras transicionales de dicha curva para determinar el lugar de ubicación de los
sensores para realizar la medición y la cuantificación de la curva, esto junto con el principio
del método de Tideström para determinar ángulos de desviación en las vértebras de una
columna vertebral.
Figura 11. Método deCobb, donde la curva pertenece a un circulo [3].
Para ubicar las vértebras que se acoplen al método de Cobb se hace uso de las mediciones
del método de Tideström para ubicar vertebras que presenten desviaciones, porque una
columna sana no presentaría desviaciones o muy mínimas, al encontrar las dos vértebras
con mayores ángulos se miden estas dos y tomando como base el método de Cobb se
determina las líneas al centro del círculo, se traza las líneas perpendiculares y se calcula el
ángulo de desviación.
4.4. Diseño de la estructura física
Para la estructura física se utilizó láminas de aluminio debido a que es ligero, resistente y
permite la ubicación de los sensores de manera que todos se encuentren con una misma
referencia, adicional a ello se pueden desplazar y ajustar como si fuese un riel para las
distintas tallas de las personas a diagnosticar. El trípode que a acompaña está formado por
una base de madera, con un tubo interno para sujetar el tubo externo que forma parte del
sistema de riel en aluminio, este tubo se desliza y permite un ajuste de altura de todo el
conjunto de sensores. Para determinar las 4 distancias, se utiliza sensores ultrasonido de
distancia de referencia US 015, para la comunicación inalámbrica con el segundo módulo
del dispositivo se utilizó dos módulos HC-05 (uno para cada parte del dispositivo) y para
la comunicación a internet se utiliza el módulo ESP 8266 integrado a la board de desarrollo
NodeMCU.
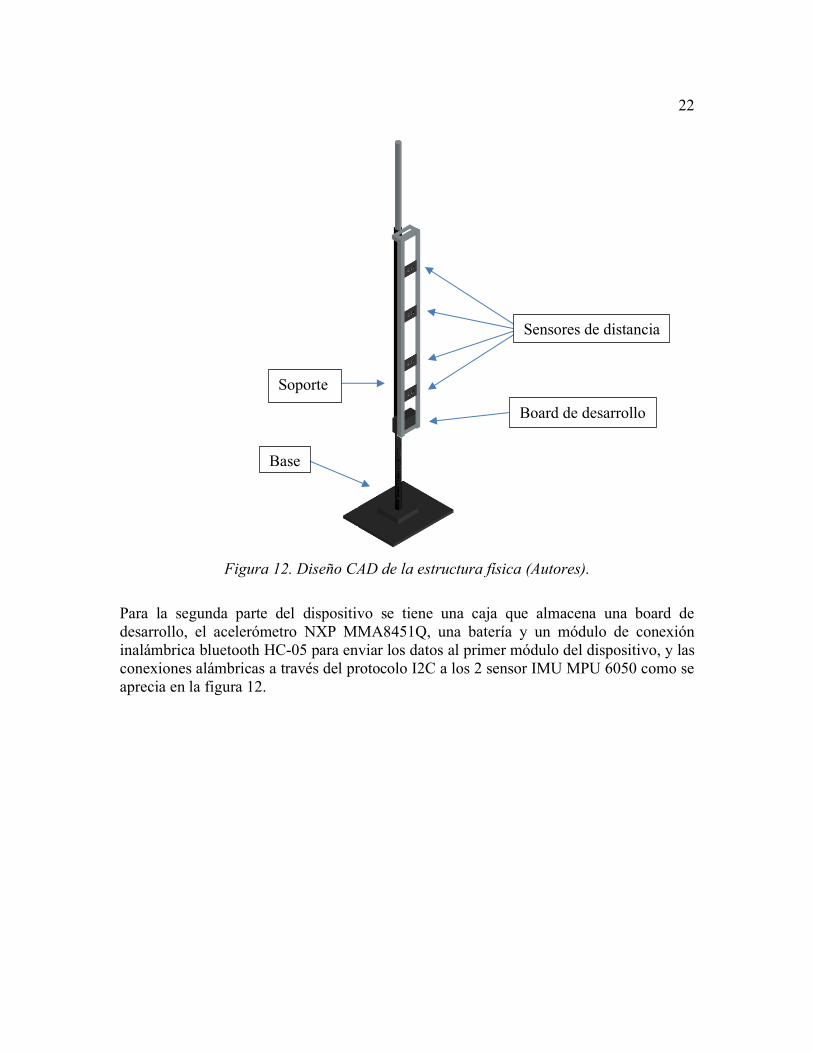
22
Figura 12. Diseño CAD de la estructura física (Autores).
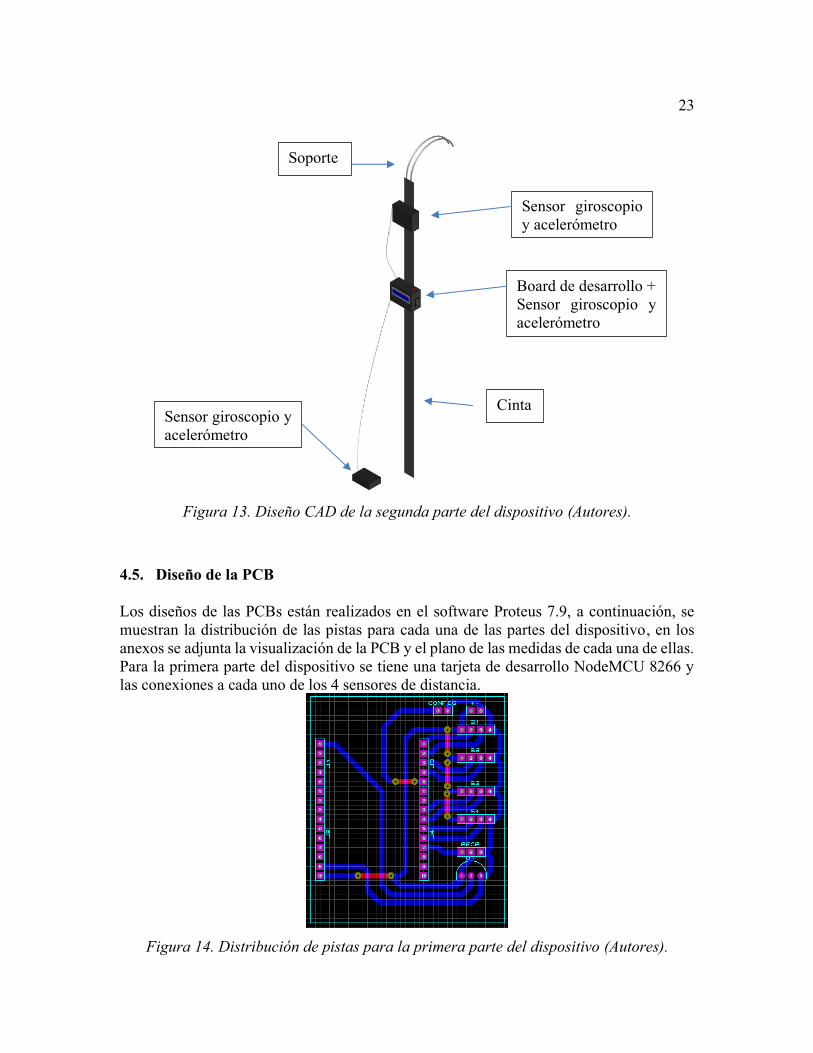
Para la segunda parte del dispositivo se tiene una caja que almacena una board de
desarrollo, el acelerómetro NXP MMA8451Q, una batería y un módulo de conexión
inalámbrica bluetooth HC-05 para enviar los datos al primer módulo del dispositivo, y las
conexiones alámbricas a través del protocolo I2C a los 2 sensor IMU MPU 6050 como se
aprecia en la figura 12.
Sensores de distancia
Base
Soporte
Board de desarrollo
23
Figura 13. Diseño CAD de la segunda parte del dispositivo (Autores).
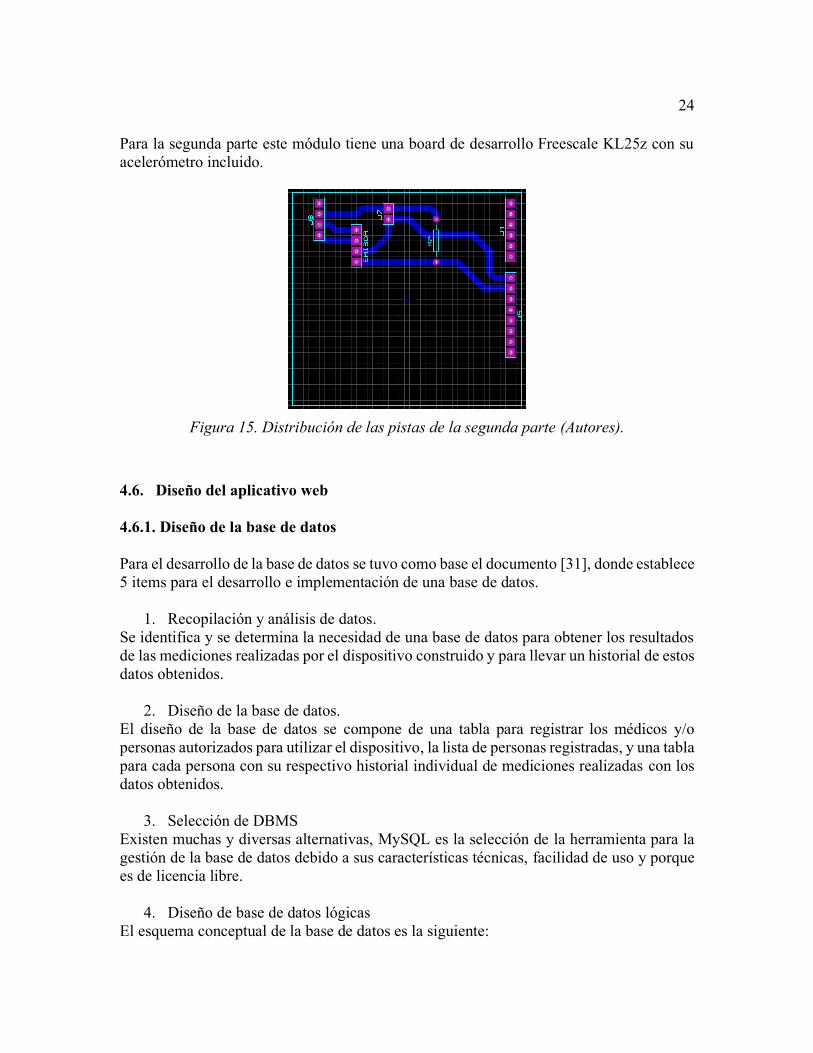
4.5. Diseño de la PCB
Los diseños de las PCBs están realizados en el software Proteus 7.9, a continuación, se
muestran la distribución de las pistas para cada una de las partes del dispositivo, en los
anexos se adjunta la visualización de la PCB y el plano de las medidas de cada una de ellas.
Para la primera parte del dispositivo se tiene una tarjeta de desarrollo NodeMCU 8266 y
las conexiones a cada uno de los 4 sensores de distancia.
Figura 14. Distribución de pistas para la primera parte del dispositivo (Autores).
Board de desarrollo +
Sensor giroscopio y
acelerómetro
Sensor giroscopio
y acelerómetro
Sensor giroscopio y
acelerómetro
Soporte
Cinta
24
Para la segunda parte este módulo tiene una board de desarrollo Freescale KL25z con su
acelerómetro incluido.
Figura 15. Distribución de las pistas de la segunda parte (Autores).
4.6. Diseño del aplicativo web
4.6.1. Diseño de la base de datos
Para el desarrollo de la base de datos se tuvo como base el documento [31], donde establece
5 items para el desarrollo e implementación de una base de datos.
1. Recopilación y análisis de datos.
Se identifica y se determina la necesidad de una base de datos para obtener los resultados
de las mediciones realizadas por el dispositivo construido y para llevar un historial de estos
datos obtenidos.
2. Diseño de la base de datos.
El diseño de la base de datos se compone de una tabla para registrar los médicos y/o
personas autorizados para utilizar el dispositivo, la lista de personas registradas, y una tabla
para cada persona con su respectivo historial individual de mediciones realizadas con los
datos obtenidos.
3. Selección de DBMS
Existen muchas y diversas alternativas, MySQL es la selección de la herramienta para la
gestión de la base de datos debido a sus características técnicas, facilidad de uso y porque
es de licencia libre.
4. Diseño de base de datos lógicas
El esquema conceptual de la base de datos es la siguiente:
25
1 tabla para usuarios de usos del dispositivo.
1 tabla para las personas registradas.
X tablas (dinámicas) para cada nueva persona que se diagnostique, para guardar
individualmente los resultados.
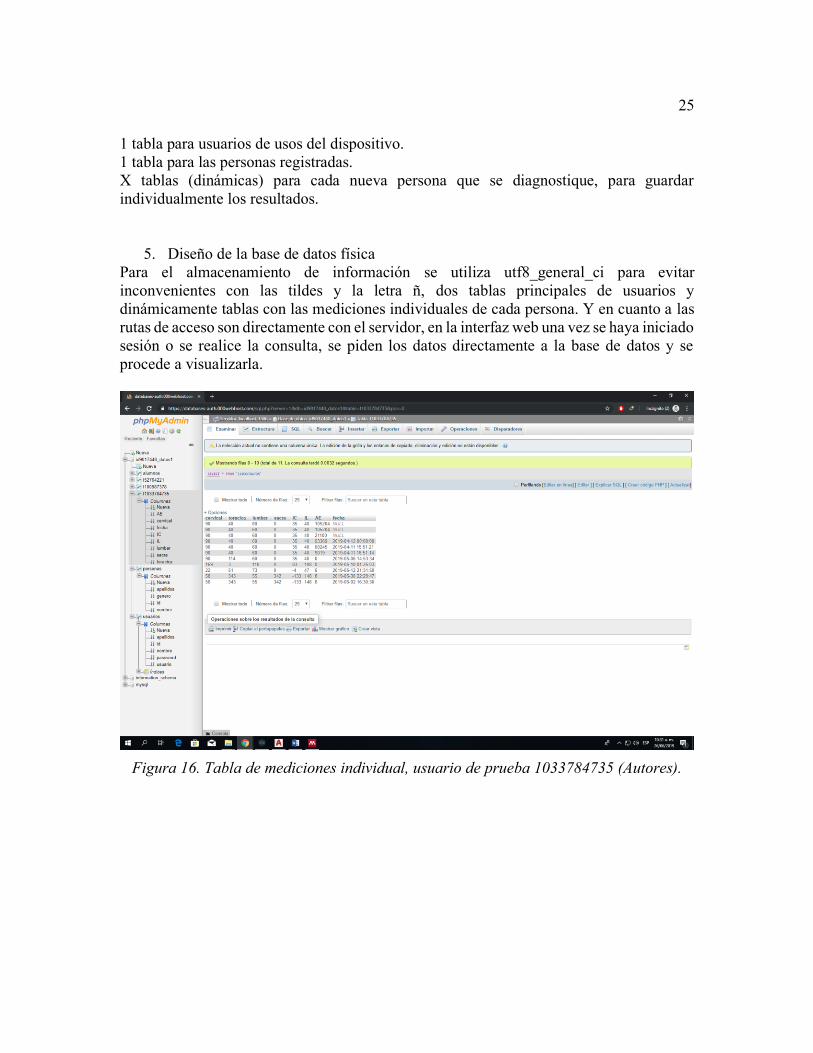
5. Diseño de la base de datos física
Para el almacenamiento de información se utiliza utf8_general_ci para evitar
inconvenientes con las tildes y la letra ñ, dos tablas principales de usuarios y
dinámicamente tablas con las mediciones individuales de cada persona. Y en cuanto a las
rutas de acceso son directamente con el servidor, en la interfaz web una vez se haya iniciado
sesión o se realice la consulta, se piden los datos directamente a la base de datos y se
procede a visualizarla.
Figura 16. Tabla de mediciones individual, usuario de prueba 1033784735 (Autores).
26
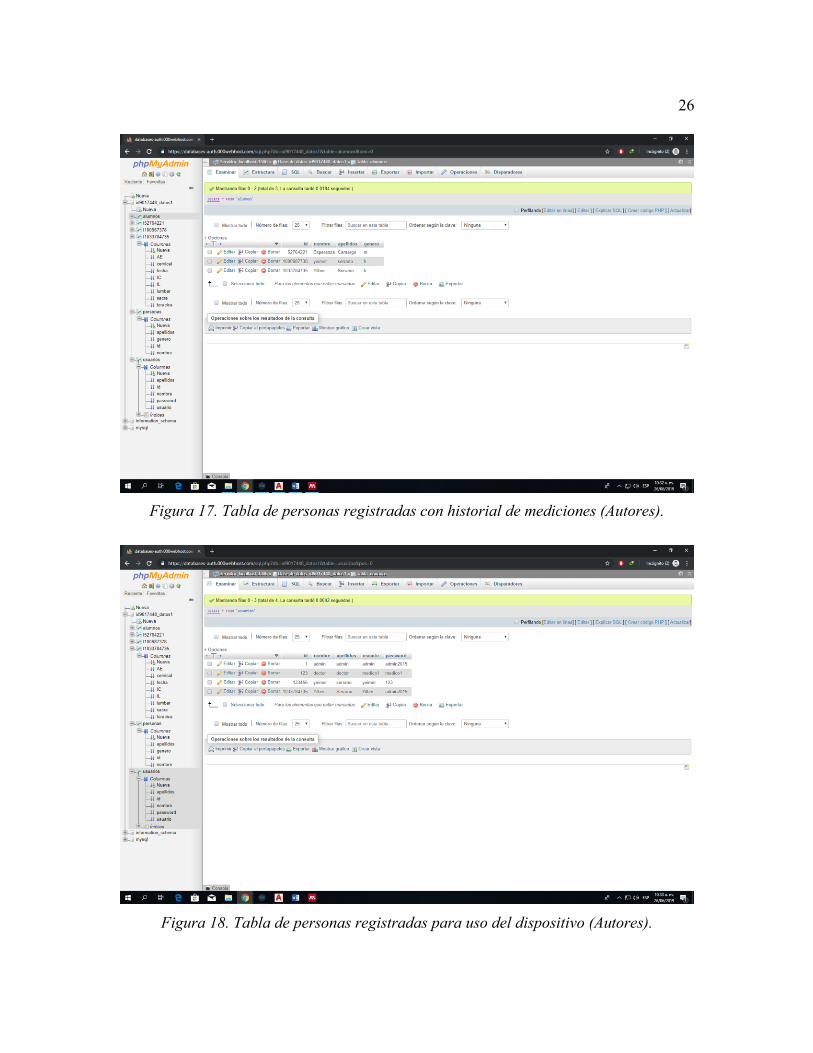
Figura 17. Tabla de personas registradas con historial de mediciones (Autores).
Figura 18. Tabla de personas registradas para uso del dispositivo (Autores).
27
6. La implementación de la base de datos
La base de datos funciona en conjunto con el aplicativo web diseñado alojado en host
gratuito.
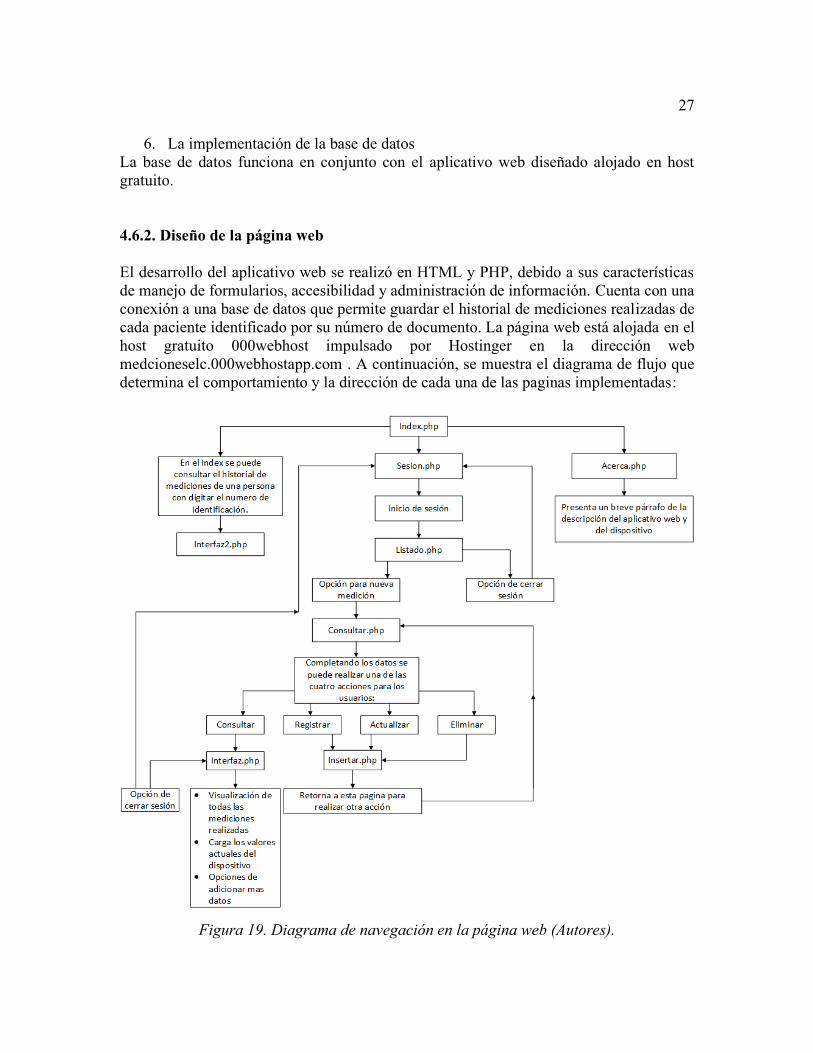
4.6.2. Diseño de la página web
El desarrollo del aplicativo web se realizó en HTML y PHP, debido a sus características
de manejo de formularios, accesibilidad y administración de información. Cuenta con una
conexión a una base de datos que permite guardar el historial de mediciones realizadas de
cada paciente identificado por su número de documento. La página web está alojada en el
host gratuito 000webhost impulsado por Hostinger en la dirección web
medcioneselc.000webhostapp.com . A continuación, se muestra el diagrama de flujo que
determina el comportamiento y la dirección de cada una de las paginas implementadas:
Figura 19. Diagrama de navegación en la página web (Autores).
28
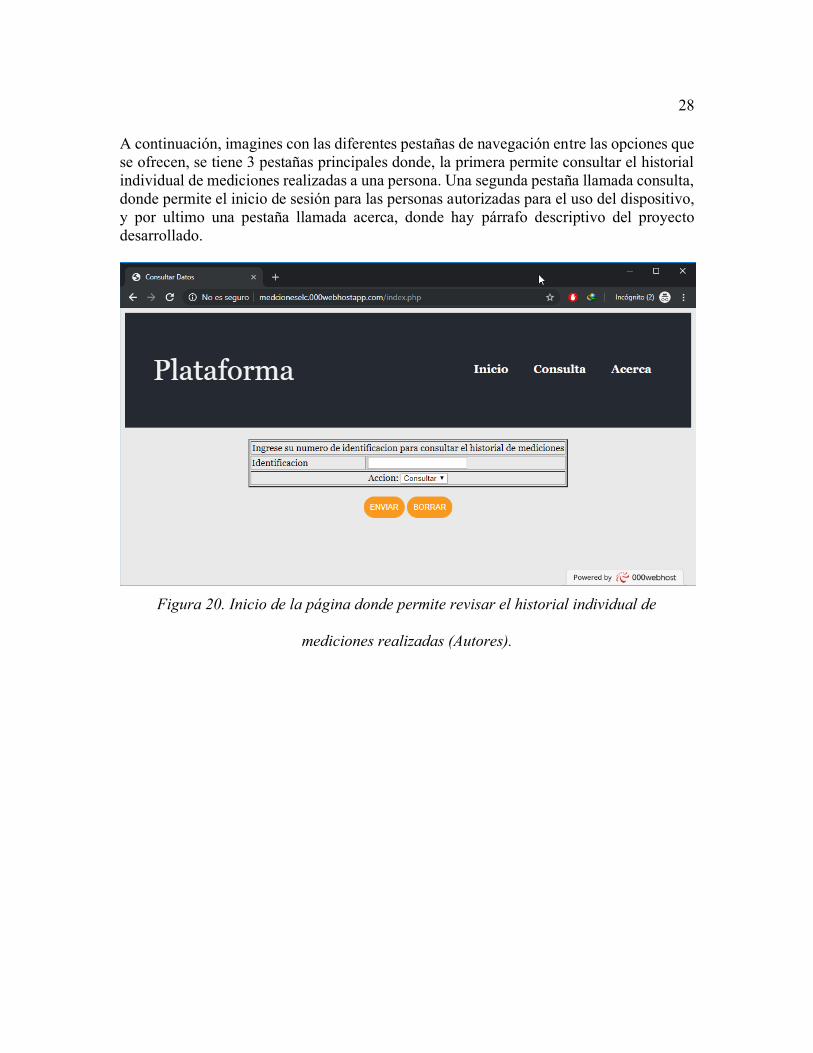
A continuación, imagines con las diferentes pestañas de navegación entre las opciones que
se ofrecen, se tiene 3 pestañas principales donde, la primera permite consultar el historial
individual de mediciones realizadas a una persona. Una segunda pestaña llamada consulta,
donde permite el inicio de sesión para las personas autorizadas para el uso del dispositivo,
y por ultimo una pestaña llamada acerca, donde hay párrafo descriptivo del proyecto
desarrollado.
Figura 20. Inicio de la página donde permite revisar el historial individual de
mediciones realizadas (Autores).
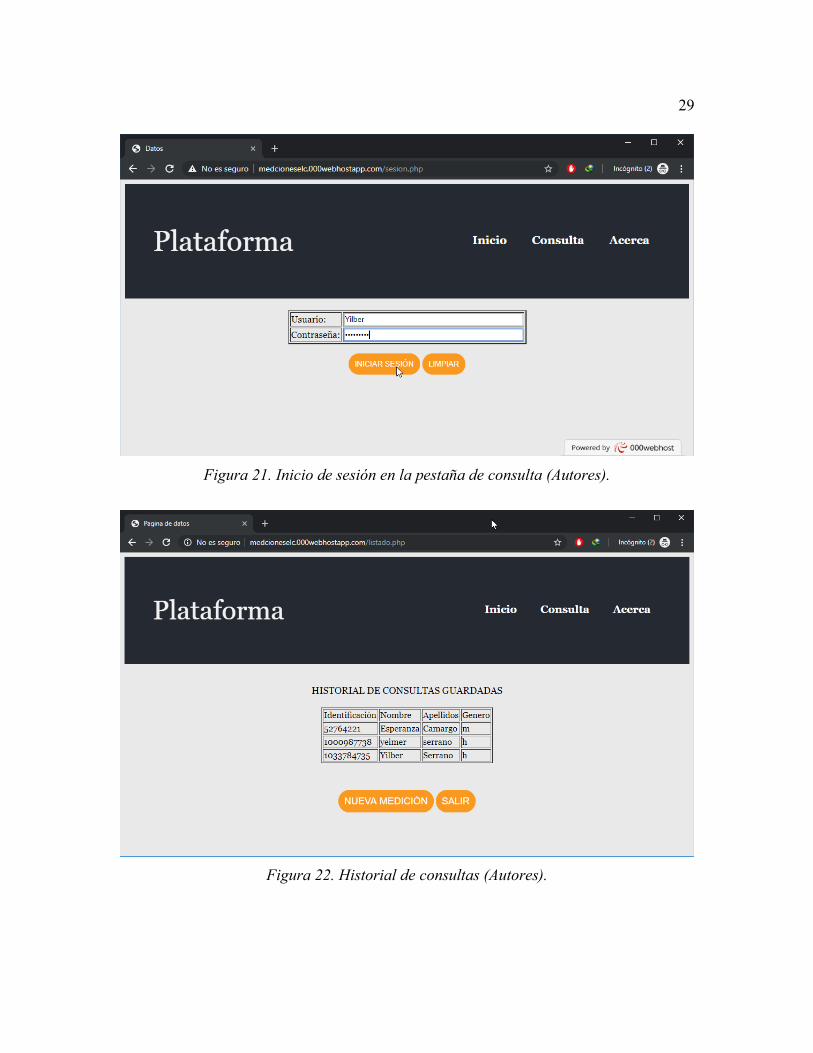
29
Figura 21. Inicio de sesión en la pestaña de consulta (Autores).
Figura 22. Historial de consultas (Autores).
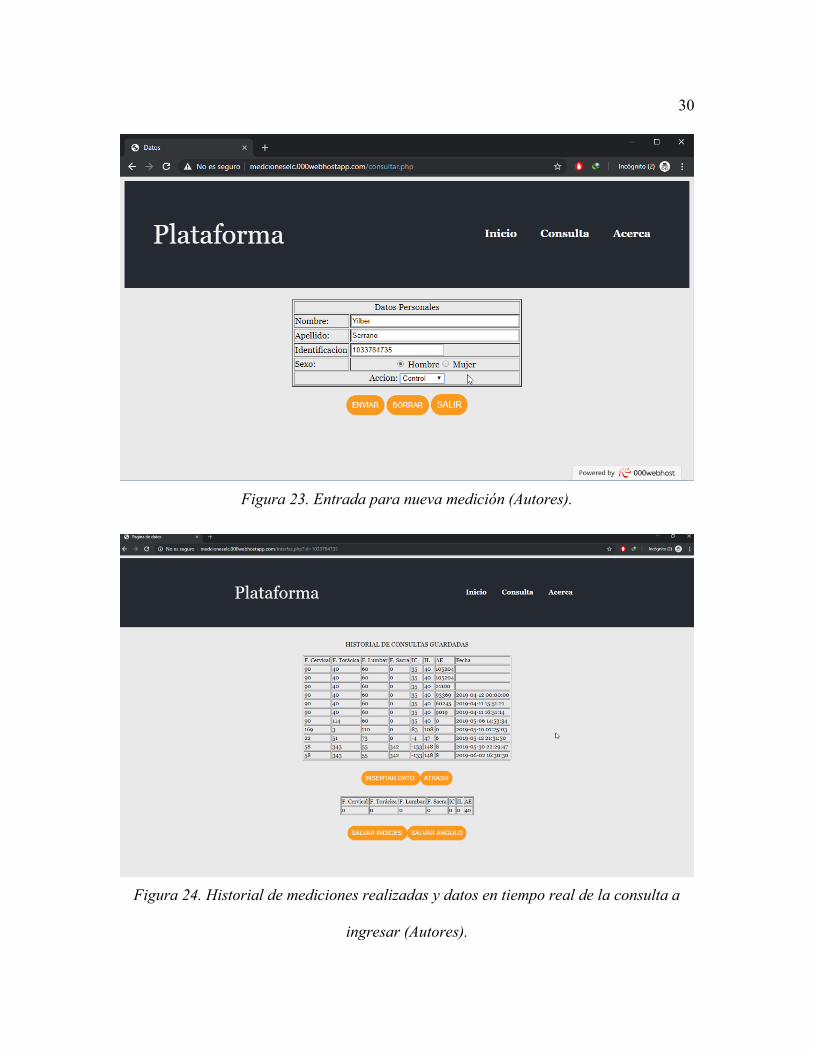
30
Figura 23. Entrada para nueva medición (Autores).
Figura 24. Historial de mediciones realizadas y datos en tiempo real de la consulta a
ingresar (Autores).
31
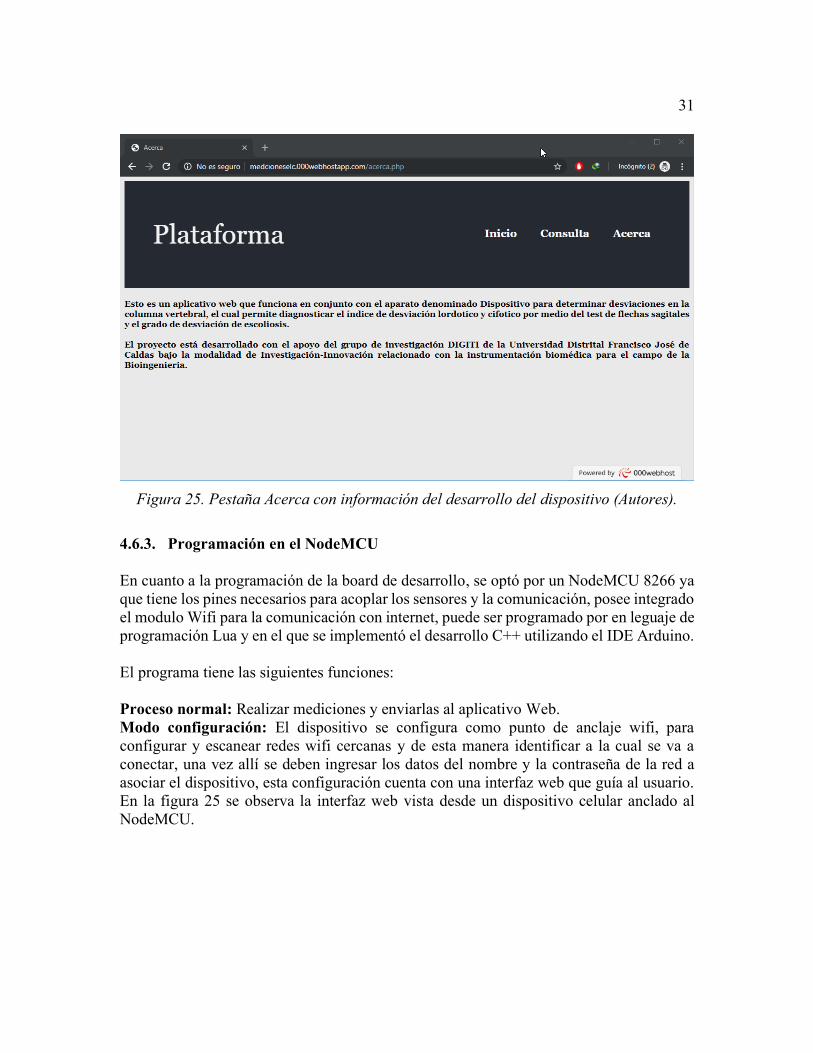
Figura 25. Pestaña Acerca con información del desarrollo del dispositivo (Autores).
4.6.3. Programación en el NodeMCU
En cuanto a la programación de la board de desarrollo, se optó por un NodeMCU 8266 ya
que tiene los pines necesarios para acoplar los sensores y la comunicación, posee integrado
el modulo Wifi para la comunicación con internet, puede ser programado por en leguaje de
programación Lua y en el que se implementó el desarrollo C++ utilizando el IDE Arduino.
El programa tiene las siguientes funciones:
Proceso normal: Realizar mediciones y enviarlas al aplicativo Web.
Modo configuración: El dispositivo se configura como punto de anclaje wifi, para
configurar y escanear redes wifi cercanas y de esta manera identificar a la cual se va a
conectar, una vez allí se deben ingresar los datos del nombre y la contraseña de la red a
asociar el dispositivo, esta configuración cuenta con una interfaz web que guía al usuario.
En la figura 25 se observa la interfaz web vista desde un dispositivo celular anclado al
NodeMCU.
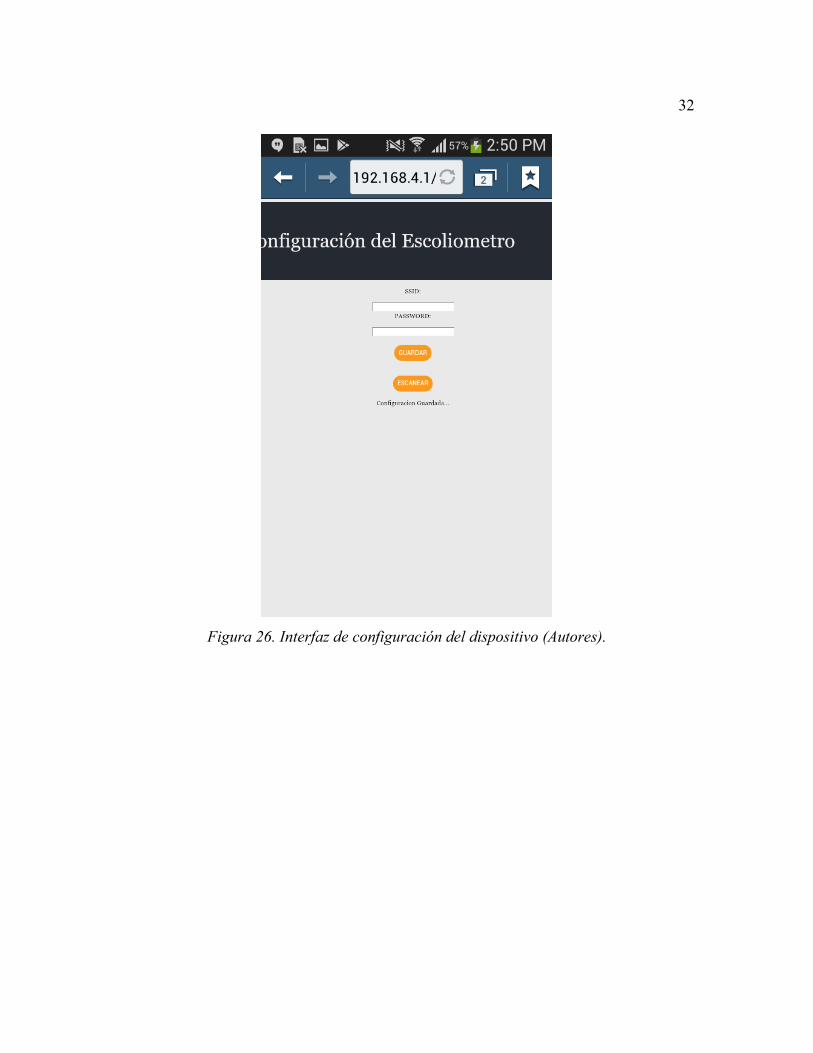
32
Figura 26. Interfaz de configuración del dispositivo (Autores).
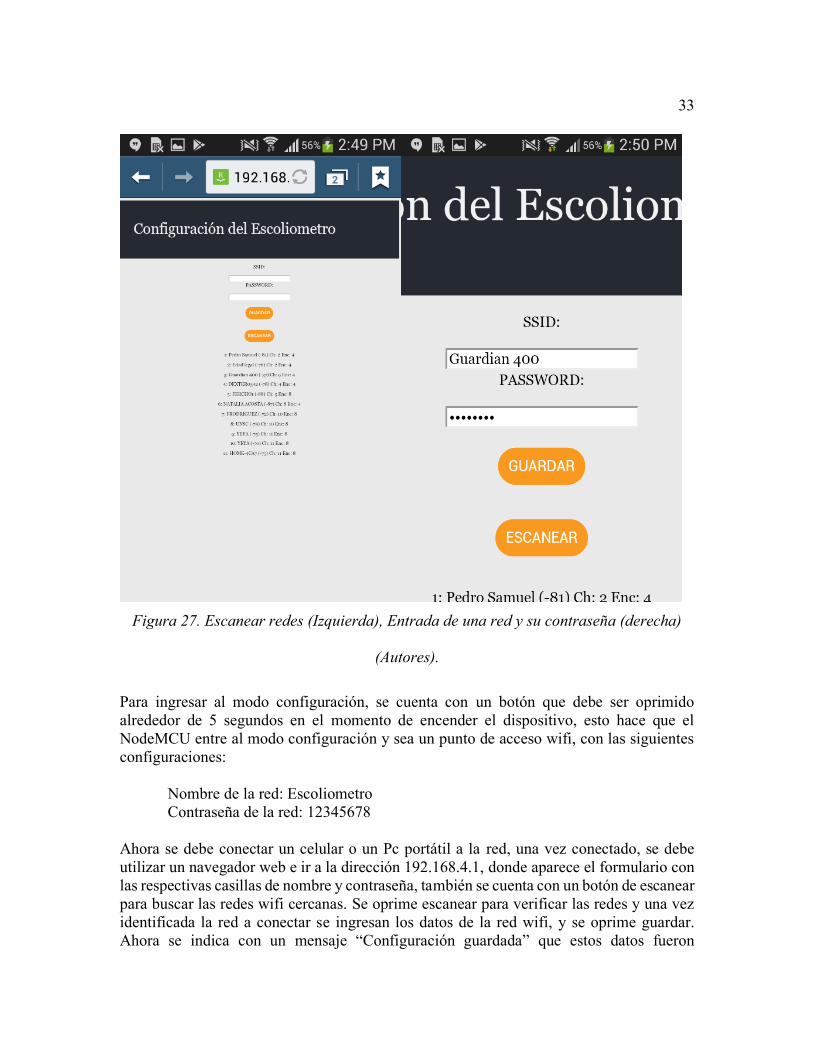
33
Figura 27. Escanear redes (Izquierda), Entrada de una red y su contraseña (derecha)
(Autores).
Para ingresar al modo configuración, se cuenta con un botón que debe ser oprimido
alrededor de 5 segundos en el momento de encender el dispositivo, esto hace que el
NodeMCU entre al modo configuración y sea un punto de acceso wifi, con las siguientes
configuraciones:
Nombre de la red: Escoliometro
Contraseña de la red: 12345678
Ahora se debe conectar un celular o un Pc portátil a la red, una vez conectado, se debe
utilizar un navegador web e ir a la dirección 192.168.4.1, donde aparece el formulario con
las respectivas casillas de nombre y contraseña, también se cuenta con un botón de escanear
para buscar las redes wifi cercanas. Se oprime escanear para verificar las redes y una vez
identificada la red a conectar se ingresan los datos de la red wifi, y se oprime guardar.
Ahora se indica con un mensaje “Configuración guardada” que estos datos fueron
34
almacenados en la EEPRON del NodeMCU, una vez reiniciado el dispositivo debe
establecer conexión con la red guardada.
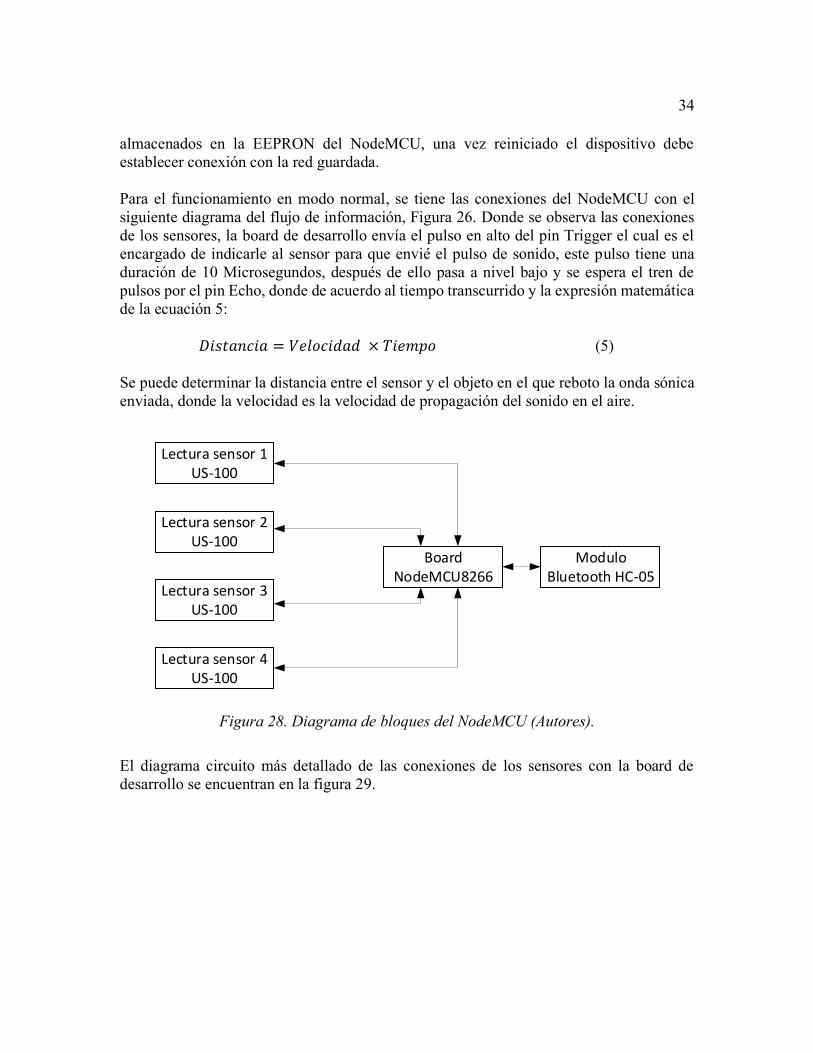
Para el funcionamiento en modo normal, se tiene las conexiones del NodeMCU con el
siguiente diagrama del flujo de información, Figura 26. Donde se observa las conexiones
de los sensores, la board de desarrollo envía el pulso en alto del pin Trigger el cual es el
encargado de indicarle al sensor para que envié el pulso de sonido, este pulso tiene una
duración de 10 Microsegundos, después de ello pasa a nivel bajo y se espera el tren de
pulsos por el pin Echo, donde de acuerdo al tiempo transcurrido y la expresión matemática
de la ecuación 5:
𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 = 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 × 𝑇𝑖𝑒𝑚𝑝𝑜 (5)
Se puede determinar la distancia entre el sensor y el objeto en el que reboto la onda sónica
enviada, donde la velocidad es la velocidad de propagación del sonido en el aire.
Lectura sensor 1 US-100
Lectura sensor 2 US-100
Lectura sensor 3 US-100
Lectura sensor 4 US-100
Board NodeMCU8266
Modulo Bluetooth HC-05
Figura 28. Diagrama de bloques del NodeMCU (Autores).
El diagrama circuito más detallado de las conexiones de los sensores con la board de
desarrollo se encuentran en la figura 29.
35
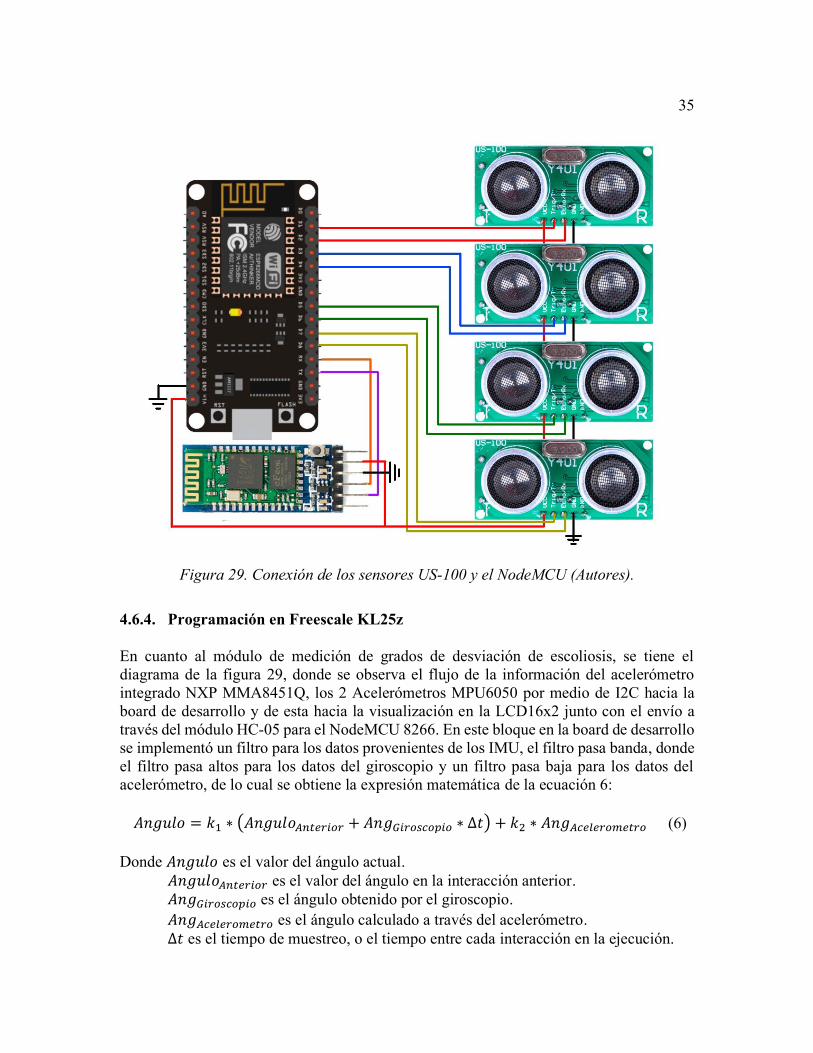
Figura 29. Conexión de los sensores US-100 y el NodeMCU (Autores).
4.6.4. Programación en Freescale KL25z
En cuanto al módulo de medición de grados de desviación de escoliosis, se tiene el
diagrama de la figura 29, donde se observa el flujo de la información del acelerómetro
integrado NXP MMA8451Q, los 2 Acelerómetros MPU6050 por medio de I2C hacia la
board de desarrollo y de esta hacia la visualización en la LCD16x2 junto con el envío a
través del módulo HC-05 para el NodeMCU 8266. En este bloque en la board de desarrollo
se implementó un filtro para los datos provenientes de los IMU, el filtro pasa banda, donde
el filtro pasa altos para los datos del giroscopio y un filtro pasa baja para los datos del
acelerómetro, de lo cual se obtiene la expresión matemática de la ecuación 6:
𝐴𝑛𝑔𝑢𝑙𝑜 = 𝑘1 ∗ (𝐴𝑛𝑔𝑢𝑙𝑜𝐴𝑛𝑡𝑒𝑟𝑖𝑜𝑟 + 𝐴𝑛𝑔𝐺𝑖𝑟𝑜𝑠𝑐𝑜𝑝𝑖𝑜 ∗ ∆𝑡) + 𝑘2 ∗ 𝐴𝑛𝑔𝐴𝑐𝑒𝑙𝑒𝑟𝑜𝑚𝑒𝑡𝑟𝑜 (6)
Donde 𝐴𝑛𝑔𝑢𝑙𝑜 es el valor del ángulo actual.
𝐴𝑛𝑔𝑢𝑙𝑜𝐴𝑛𝑡𝑒𝑟𝑖𝑜𝑟 es el valor del ángulo en la interacción anterior.
𝐴𝑛𝑔𝐺𝑖𝑟𝑜𝑠𝑐𝑜𝑝𝑖𝑜 es el ángulo obtenido por el giroscopio.
𝐴𝑛𝑔𝐴𝑐𝑒𝑙𝑒𝑟𝑜𝑚𝑒𝑡𝑟𝑜 es el ángulo calculado a través del acelerómetro.
∆𝑡 es el tiempo de muestreo, o el tiempo entre cada interacción en la ejecución.
36
La condición para aplicar el filtro es que las constantes que multiplican cada dato de ángulo
individual 𝑘1 y 𝑘2 al sumarse debe ser igual a 1, por ejemplo 0.98+0.02=1, resultando:
𝐴𝑛𝑔𝑢𝑙𝑜 = 0.98 ∗ (𝐴𝑛𝑔𝑢𝑙𝑜𝐴𝑛𝑡𝑒𝑟𝑖𝑜𝑟 + 𝐴𝑛𝑔𝐺𝑖𝑟𝑜𝑠𝑐𝑜𝑝𝑖𝑜 ∗ ∆𝑡) + 0.02 ∗ 𝐴𝑛𝑔𝐴𝑐𝑒𝑙𝑒𝑟𝑜𝑚𝑒𝑡𝑟𝑜 (7)
AcelerómetroNXP MMA8451Q
Board Freescale KL25z
Modulo Bluetooth HC-05
I2c
Pantalla LCD16x2
Acelerómetro+ Giroscopio MPU6050
Acelerómetro+ Giroscopio MPU6050
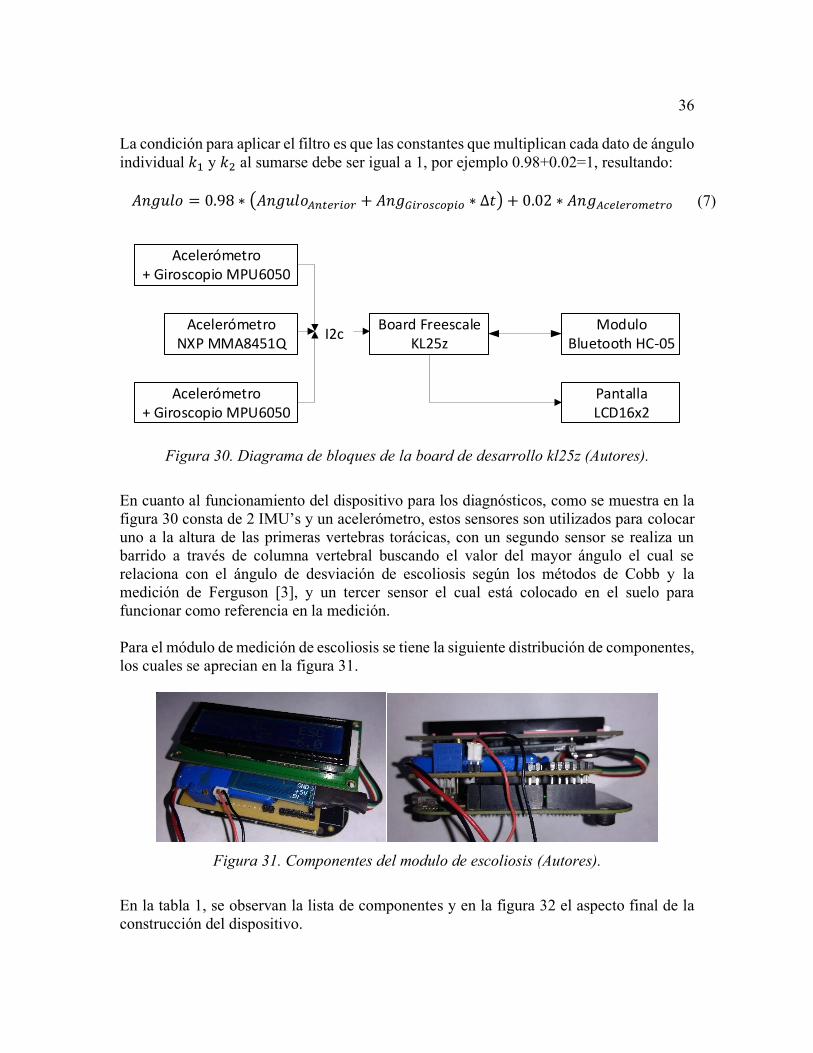
Figura 30. Diagrama de bloques de la board de desarrollo kl25z (Autores).
En cuanto al funcionamiento del dispositivo para los diagnósticos, como se muestra en la
figura 30 consta de 2 IMU’s y un acelerómetro, estos sensores son utilizados para colocar
uno a la altura de las primeras vertebras torácicas, con un segundo sensor se realiza un
barrido a través de columna vertebral buscando el valor del mayor ángulo el cual se
relaciona con el ángulo de desviación de escoliosis según los métodos de Cobb y la
medición de Ferguson [3], y un tercer sensor el cual está colocado en el suelo para
funcionar como referencia en la medición.
Para el módulo de medición de escoliosis se tiene la siguiente distribución de componentes,
los cuales se aprecian en la figura 31.
Figura 31. Componentes del modulo de escoliosis (Autores).
En la tabla 1, se observan la lista de componentes y en la figura 32 el aspecto final de la
construcción del dispositivo.
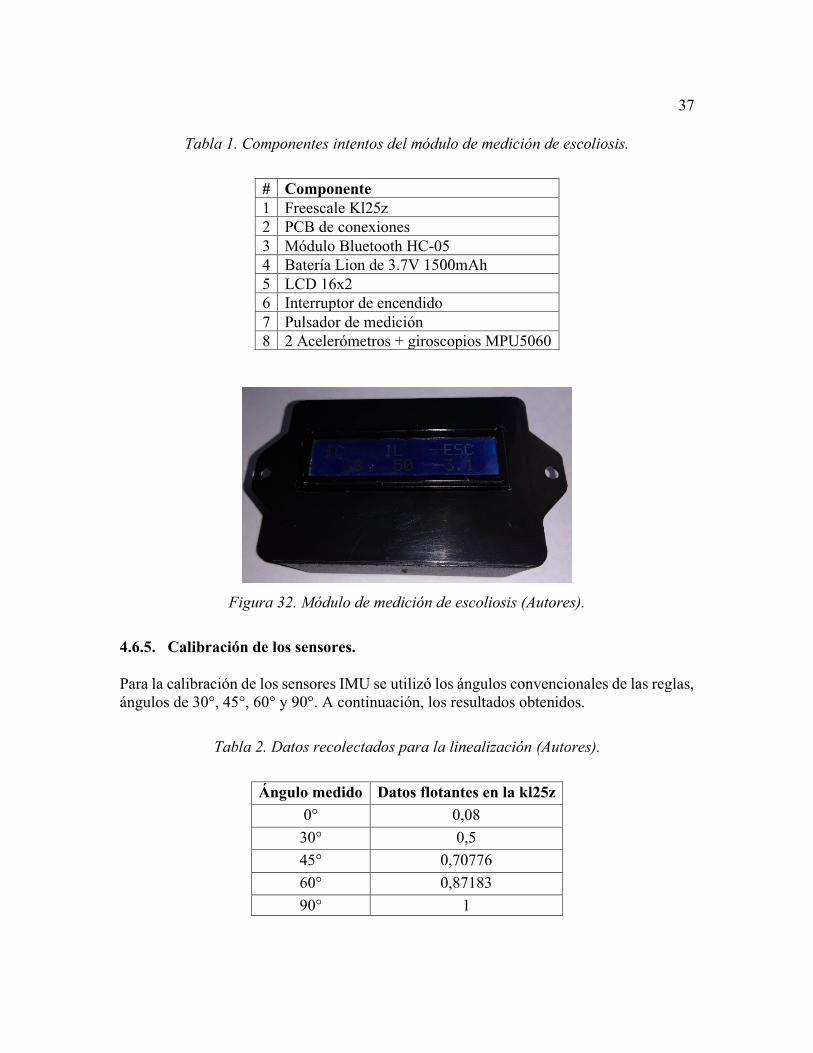
37
Tabla 1. Componentes intentos del módulo de medición de escoliosis.
# Componente
1 Freescale Kl25z
2 PCB de conexiones
3 Módulo Bluetooth HC-05
4 Batería Lion de 3.7V 1500mAh
5 LCD 16x2
6 Interruptor de encendido
7 Pulsador de medición
8 2 Acelerómetros + giroscopios MPU5060
Figura 32. Módulo de medición de escoliosis (Autores).
4.6.5. Calibración de los sensores.
Para la calibración de los sensores IMU se utilizó los ángulos convencionales de las reglas,
ángulos de 30°, 45°, 60° y 90°. A continuación, los resultados obtenidos.
Tabla 2. Datos recolectados para la linealización (Autores).
Ángulo medido Datos flotantes en la kl25z
0° 0,08
30° 0,5
45° 0,70776
60° 0,87183
90° 1
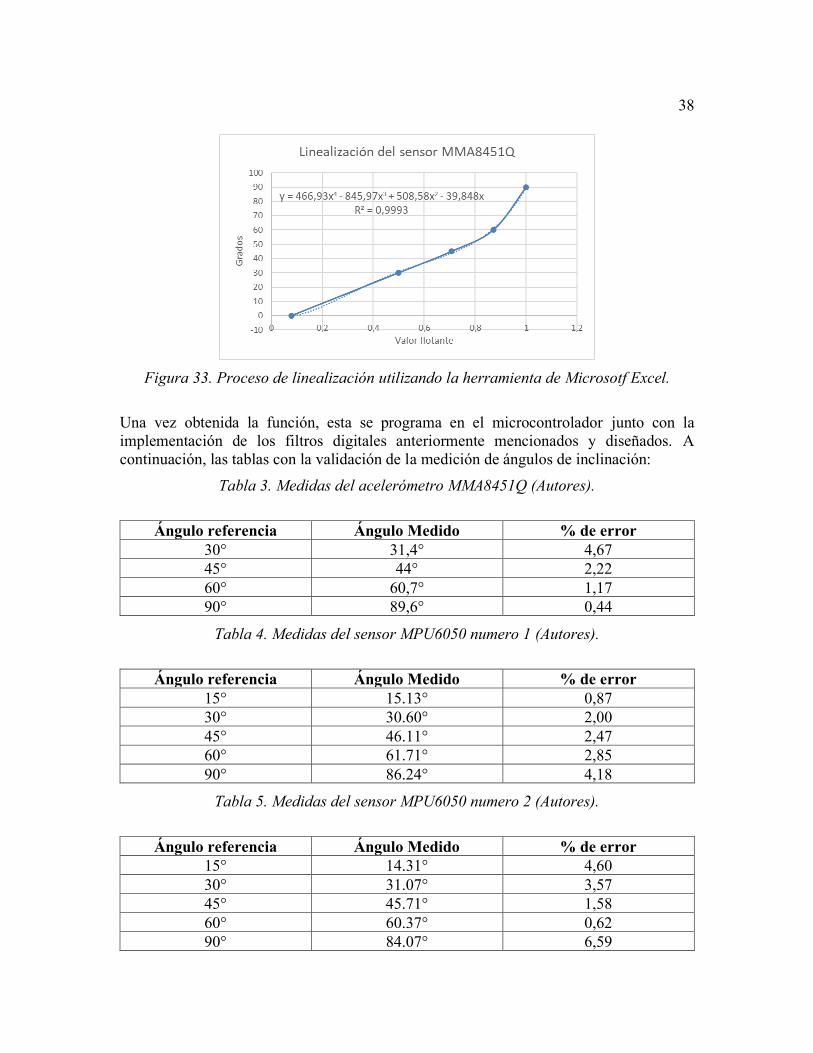
38
Figura 33. Proceso de linealización utilizando la herramienta de Microsotf Excel.
Una vez obtenida la función, esta se programa en el microcontrolador junto con la
implementación de los filtros digitales anteriormente mencionados y diseñados. A
continuación, las tablas con la validación de la medición de ángulos de inclinación:
Tabla 3. Medidas del acelerómetro MMA8451Q (Autores).
Ángulo referencia Ángulo Medido % de error
30° 31,4° 4,67
45° 44° 2,22
60° 60,7° 1,17
90° 89,6° 0,44
Tabla 4. Medidas del sensor MPU6050 numero 1 (Autores).
Ángulo referencia Ángulo Medido % de error
15° 15.13° 0,87
30° 30.60° 2,00
45° 46.11° 2,47
60° 61.71° 2,85
90° 86.24° 4,18
Tabla 5. Medidas del sensor MPU6050 numero 2 (Autores).
Ángulo referencia Ángulo Medido % de error
15° 14.31° 4,60
30° 31.07° 3,57
45° 45.71° 1,58
60° 60.37° 0,62
90° 84.07° 6,59

39
En la figura 34, se observa el dispositivo final, en (a) una vista lateral del trípode y del riel
en aluminio, en (b) una vista frontal del dispositivo y en (c) el modulo del ángulo de la
escoliosis con sus 3 partes (o cajas) que contiene los sensores IMU.
(a) (b) (c)
Figura 34.Dispositivo final, (a) Dispositivo para el diagnóstico de IL e IL vista lateral,
(b) Dispositivo para el diagnóstico de IL e IL vista frontal, (c) Dispositivo para
diagnóstico de ángulo de escoliosis (Autores).
40
5. Resultados
5.1. Implementación
Para la puesta en marcha del dispositivo y el desarrollo de las mediciones, estas fueron
realizadas en un consultorio en las instalaciones de una piscina de Comfacundi ubicada en
la dirección Calle 53 #10-39. Donde con la colaboración de especialistas fisioterapeutas
fue posible el desarrollo de las siguientes 4 etapas:
1. Presentación del dispositivo: El primer paso fue una reunión con especialistas
relacionados con el tema de desviaciones en la columna vertebral y problemas
lumbares, esto con el fin de la presentación y el conocimiento del proyecto por parte
de ellos para la implementación del dispositivo y el desarrollo de mediciones.
2. Ajustes y correcciones de acuerdo a la junta de fisioterapeutas: Una vez
presentado el dispositivo, se tuvieron sugerencias, correcciones y calibraciones
realizados por el equipo de fisioterapeutas.
3. Validación de funcionamiento: Después de las modificaciones y ajustes
realizados, la etapa de validación se realizó mediante la ejecución de la toma de
medidas en las instalaciones donde se realiza hidroterapias, allí con la ayuda de
especialistas se realiza el procedimiento de las mediciones, primero un
consentimiento y explicación del proyecto y el dispositivo desarrollado seguido de
la medición.
Figura 35. Imágenes tomadas durante la medición de algunas personas (Autores).
41
4. Implementación: Una vez calibrado y aprobado por los especialistas
fisioterapeutas, se realizaron las mediciones. Los resultados obtenidos se presentan
en las tablas de la 6 a la 10, en el apartado de análisis de resultados, en los anexos
2 se encuentran los soportes clínicos (historia clínica, exámenes e informes) para la
comparación y comprobación de los resultados de dispositivo. Y en la anterior
figura 34, dos fotos de la implementación y medición de dos personas.
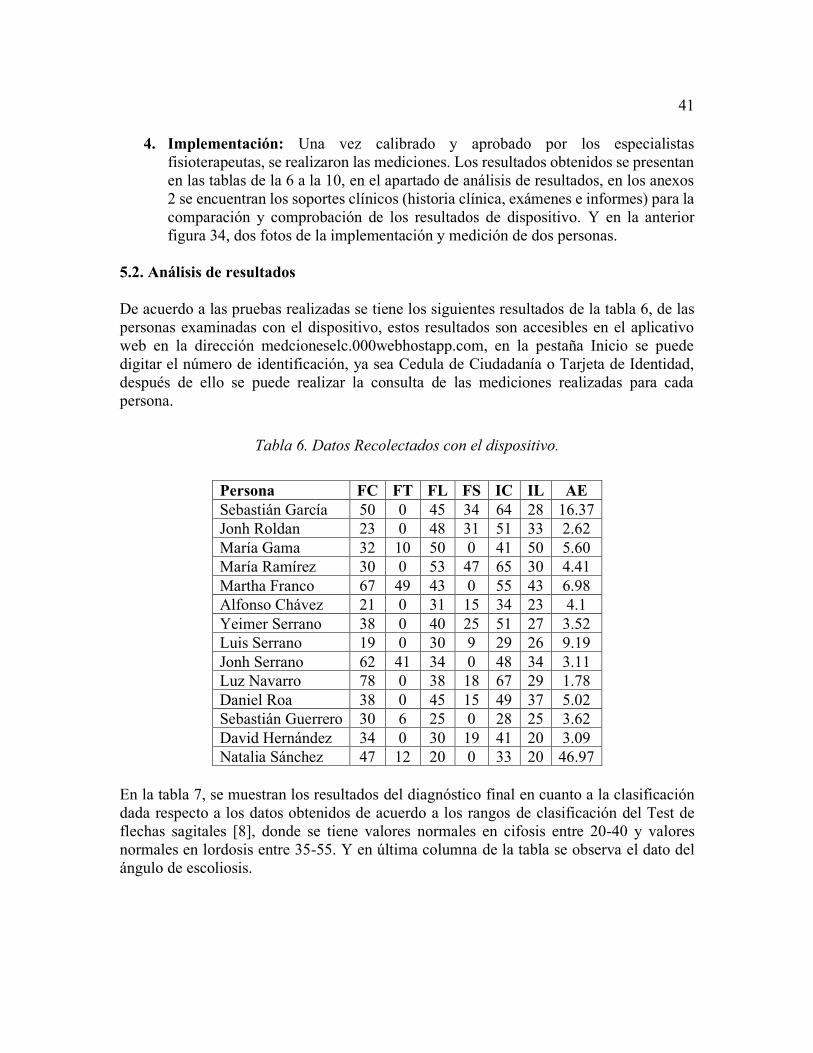
5.2. Análisis de resultados
De acuerdo a las pruebas realizadas se tiene los siguientes resultados de la tabla 6, de las
personas examinadas con el dispositivo, estos resultados son accesibles en el aplicativo
web en la dirección medcioneselc.000webhostapp.com, en la pestaña Inicio se puede
digitar el número de identificación, ya sea Cedula de Ciudadanía o Tarjeta de Identidad,
después de ello se puede realizar la consulta de las mediciones realizadas para cada
persona.
Tabla 6. Datos Recolectados con el dispositivo.
Persona FC FT FL FS IC IL AE
Sebastián García 50 0 45 34 64 28 16.37
Jonh Roldan 23 0 48 31 51 33 2.62
María Gama 32 10 50 0 41 50 5.60
María Ramírez 30 0 53 47 65 30 4.41
Martha Franco 67 49 43 0 55 43 6.98
Alfonso Chávez 21 0 31 15 34 23 4.1
Yeimer Serrano 38 0 40 25 51 27 3.52
Luis Serrano 19 0 30 9 29 26 9.19
Jonh Serrano 62 41 34 0 48 34 3.11
Luz Navarro 78 0 38 18 67 29 1.78
Daniel Roa 38 0 45 15 49 37 5.02
Sebastián Guerrero 30 6 25 0 28 25 3.62
David Hernández 34 0 30 19 41 20 3.09
Natalia Sánchez 47 12 20 0 33 20 46.97
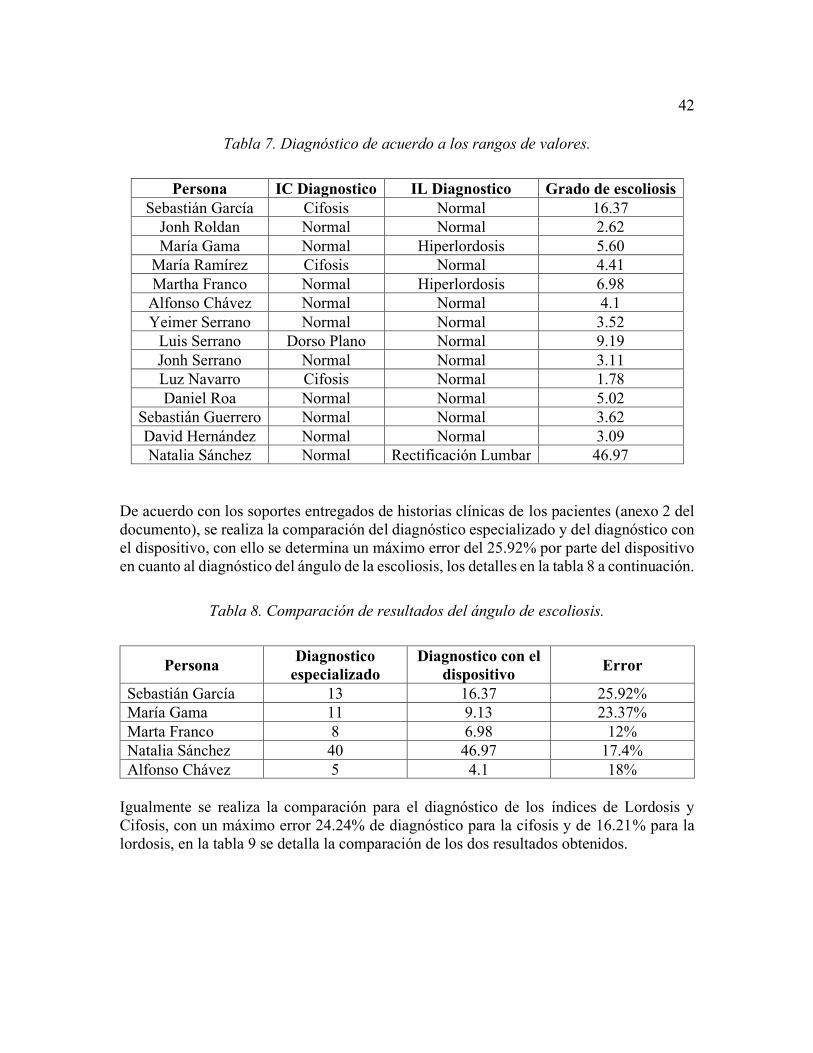
En la tabla 7, se muestran los resultados del diagnóstico final en cuanto a la clasificación
dada respecto a los datos obtenidos de acuerdo a los rangos de clasificación del Test de
flechas sagitales [8], donde se tiene valores normales en cifosis entre 20-40 y valores
normales en lordosis entre 35-55. Y en última columna de la tabla se observa el dato del
ángulo de escoliosis.
42
Tabla 7. Diagnóstico de acuerdo a los rangos de valores.
Persona IC Diagnostico IL Diagnostico Grado de escoliosis
Sebastián García Cifosis Normal 16.37
Jonh Roldan Normal Normal 2.62
María Gama Normal Hiperlordosis 5.60
María Ramírez Cifosis Normal 4.41
Martha Franco Normal Hiperlordosis 6.98
Alfonso Chávez Normal Normal 4.1
Yeimer Serrano Normal Normal 3.52
Luis Serrano Dorso Plano Normal 9.19
Jonh Serrano Normal Normal 3.11
Luz Navarro Cifosis Normal 1.78
Daniel Roa Normal Normal 5.02
Sebastián Guerrero Normal Normal 3.62
David Hernández Normal Normal 3.09
Natalia Sánchez Normal Rectificación Lumbar 46.97
De acuerdo con los soportes entregados de historias clínicas de los pacientes (anexo 2 del
documento), se realiza la comparación del diagnóstico especializado y del diagnóstico con
el dispositivo, con ello se determina un máximo error del 25.92% por parte del dispositivo
en cuanto al diagnóstico del ángulo de la escoliosis, los detalles en la tabla 8 a continuación.
Tabla 8. Comparación de resultados del ángulo de escoliosis.
Persona Diagnostico
especializado
Diagnostico con el
dispositivo Error
Sebastián García 13 16.37 25.92%
María Gama 11 9.13 23.37%
Marta Franco 8 6.98 12%
Natalia Sánchez 40 46.97 17.4%
Alfonso Chávez 5 4.1 18%
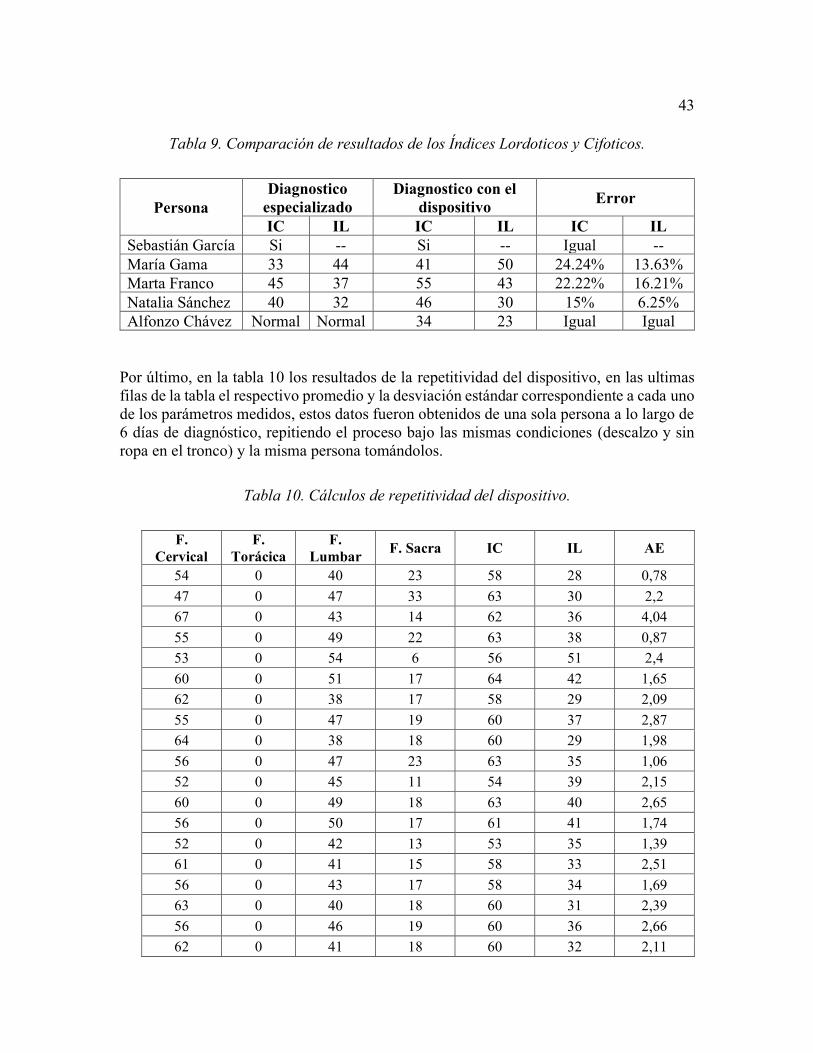
Igualmente se realiza la comparación para el diagnóstico de los índices de Lordosis y
Cifosis, con un máximo error 24.24% de diagnóstico para la cifosis y de 16.21% para la
lordosis, en la tabla 9 se detalla la comparación de los dos resultados obtenidos.
43
Tabla 9. Comparación de resultados de los Índices Lordoticos y Cifoticos.
Persona
Diagnostico
especializado
Diagnostico con el
dispositivo Error
IC IL IC IL IC IL
Sebastián García Si -- Si -- Igual --
María Gama 33 44 41 50 24.24% 13.63%
Marta Franco 45 37 55 43 22.22% 16.21%
Natalia Sánchez 40 32 46 30 15% 6.25%
Alfonzo Chávez Normal Normal 34 23 Igual Igual
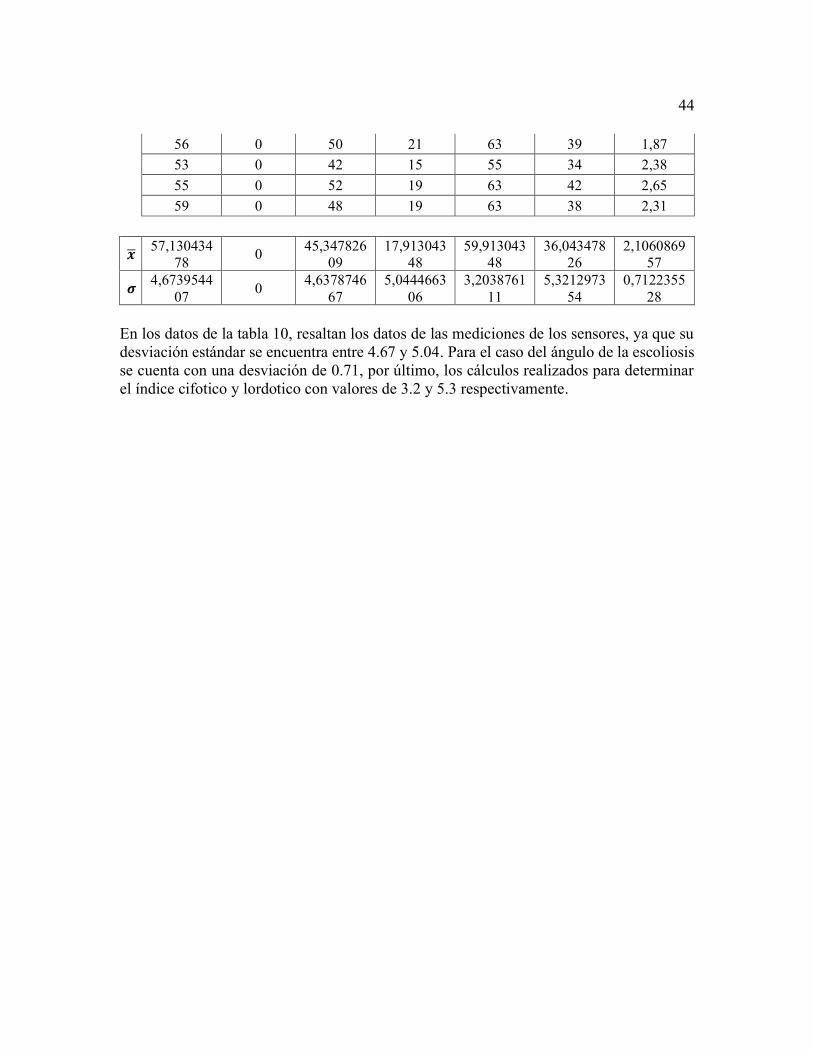
Por último, en la tabla 10 los resultados de la repetitividad del dispositivo, en las ultimas
filas de la tabla el respectivo promedio y la desviación estándar correspondiente a cada uno
de los parámetros medidos, estos datos fueron obtenidos de una sola persona a lo largo de
6 días de diagnóstico, repitiendo el proceso bajo las mismas condiciones (descalzo y sin
ropa en el tronco) y la misma persona tomándolos.
Tabla 10. Cálculos de repetitividad del dispositivo.
F.
Cervical
F.
Torácica
F.
Lumbar F. Sacra IC IL AE
54 0 40 23 58 28 0,78 47 0 47 33 63 30 2,2 67 0 43 14 62 36 4,04 55 0 49 22 63 38 0,87 53 0 54 6 56 51 2,4 60 0 51 17 64 42 1,65 62 0 38 17 58 29 2,09 55 0 47 19 60 37 2,87 64 0 38 18 60 29 1,98 56 0 47 23 63 35 1,06 52 0 45 11 54 39 2,15 60 0 49 18 63 40 2,65 56 0 50 17 61 41 1,74 52 0 42 13 53 35 1,39 61 0 41 15 58 33 2,51 56 0 43 17 58 34 1,69 63 0 40 18 60 31 2,39 56 0 46 19 60 36 2,66 62 0 41 18 60 32 2,11
44
56 0 50 21 63 39 1,87 53 0 42 15 55 34 2,38 55 0 52 19 63 42 2,65 59 0 48 19 63 38 2,31
𝒙 57,130434
78 0
45,347826
09
17,913043
48
59,913043
48
36,043478
26
2,1060869
57
𝝈 4,6739544
07 0
4,6378746
67
5,0444663
06
3,2038761
11
5,3212973
54
0,7122355
28
En los datos de la tabla 10, resaltan los datos de las mediciones de los sensores, ya que su
desviación estándar se encuentra entre 4.67 y 5.04. Para el caso del ángulo de la escoliosis
se cuenta con una desviación de 0.71, por último, los cálculos realizados para determinar
el índice cifotico y lordotico con valores de 3.2 y 5.3 respectivamente.
45
5.3. Conclusiones
Se desarrolló un dispositivo que permite el diagnóstico de desviaciones de la columna
vertebral, ajustado, calibrado y validado por un especialista fisioterapeuta. Durante la
implementación se tuvo diferentes personas en cuanto a edad y género, el error del módulo
de diagnóstico del ángulo de la escoliosis es de 25.92% y para el diagnóstico de índices de
cifosis y lordosis se tiene un error máximo del 24.24% y 16.21% respectivamente, se resalta
que como el método el dispositivo presenta subjetividad en cuanto al desarrollo de
mediciones y depende de la persona especialista que se encuentre realizando las
mediciones.
Para el tratamiento y acondicionamiento de las señales se implementó un filtro para mejorar
la respuesta de la medición, se optó por implementar el filtro complementario debido al
procesamiento del microcontrolador. Otro factor importante en la toma de mediciones es
el uso de la ropa, para las correctas mediciones es necesario el uso de ropa muy ajustada o
estar sin ella para la ubicación de los puntos vertebrales y así garantizar la ejecución de la
medición en la persona.
La interfaz web al ser desarrollada en HTML y PHP permite por un lado el objetivo del
acceso remoto, control y consulta de los datos debido al alojamiento de esta en un host,
adicional a ello también se enfocó en que fuera multiplataforma adaptándose al tamaño de
la ventana del dispositivo en el cual se esté accediendo (celulares móviles, tablet, Pc de
escritorios y portátiles).
Para que el dispositivo ejecute el envío de datos al aplicativo web y el correcto
almacenamiento en la base de datos de MySQL se debe contar con una conexión de subida
de datos a internet de 2Mbps si se realizara a través de un Modem. Para el caso de un
celular como punto de acceso se debe contar con cobertura 4G, ya que, si no se cumple
esto, él envió de datos se ve afectado en cuanto a la actualización y refresco de los datos
por la alta latencia.
5.4. Trabajo Futuro
Para el trabajo futuro se plantea realizar un análisis de datos, aplicando técnicas de Big
Data con el fin de identificar patrones, relaciones o información relevante de las
mediciones realizadas o con técnicas de predicción matemática para predecir alguna
condición a futuro sobre las desviaciones e índices identificados.
La escalabilidad del dispositivo, se puede llevar a producir muchos dispositivos para
trabajar en conjunto con la interfaz web desarrollada. Es dirigir el dispositivo hacia una
característica IoT, volverlo más robusto y escalarlo a diferentes partes, áreas y ámbitos.

46
Como iniciática se puede llegar a proponer nuevos dispositivos ya sea para diagnóstico,
tratamiento y/o corrección de este tipo de enfermedades.
47
6. Bibliografía
[1] Enrique Osorio Fonseca-Andres Rubiano-Juan Carlos Diez Palma, “XXVI
Simposio Internacional de Neurocirugía Simposio Internacional de Cirugía de
Columna y Neurooncología IX Encuentro de Neurocirujanos en Formación,” Com.
Científico Rev. Neurociencias en Colomb., pp. 185–302, 2016.
[2] L. I. Álvarez García de Quesada and A. Núñez Giralda, “Escoliosis idiopática ,”
Pediatría Atención Primaria , vol. 13. scieloes , pp. 135–146, 2011.
[3] J. Muñoz, Atlas de mediciones radiográficas en ortopedia y traumatología, 2nd ed.
2011.
[4] P. F. Miguel, “Aplicación para la detección de desviaciones de la columna
vertebral,” 2017.
[5] L. Abril López, A. Gisbert Calbo, and A. Pérez Davia, Patología y Enfoque
Terapéutico del Aparato Locomotor, 2o Grado d. 2018.
[6] Redacción el Tiempo, “Exceso de radiografías y TAC pueden perjudicar la salud de
las personas, sobre todo de los niños,” 28 de junio, 2008. [Online]. Available:
https://www.eltiempo.com/archivo/documento/CMS-4353122.
[7] SCCOT, “Columna,” 2017. [Online]. Available:
http://www.sccot.org.co/index.php/2013-09-16-20-49-22/columna. [Accessed: 20-
Jan-2019].
[8] F. Santonja and A. Pastor, “Cifosis y lordosis,” Cifosis Y Lordosis., pp. 1049–1061,
2003.
[9] J. Y. Jung et al., “Evaluation of sitting balance in adolescent idiopathic scoliosis
patients with pelvic rotation using balance board system with accelerometer,” 2014
Int. Conf. IT Converg. Secur. ICITCS 2014, pp. 3–6, 2014.
[10] S. H. Jeong, S. W. Shin, J. Y. An, and S. T. Chung, “3D modeling of musculoskeletal
Cobb’s angles,” Proc. 2013 6th Int. Conf. Biomed. Eng. Informatics, BMEI 2013,
no. Bmei, pp. 393–397, 2013.
[11] S. Tanee and D. Thanapatay, “Scoliosis screening using depth camera,” 2017 Int.
Electr. Eng. Congr. iEECON 2017, no. March, pp. 8–10, 2017.
[12] L. Seoud, M. M. Adankon, H. Labelle, J. Dansereau, and F. Cheriet, “Prediction of
scoliosis curve type based on the analysis of trunk surface topography,” 2010 7th
IEEE Int. Symp. Biomed. Imaging From Nano to Macro, ISBI 2010 - Proc., vol. 2,
no. 1, pp. 408–411, 2010.
[13] Y. P. Zheng et al., “A reliability and validity study for Scolioscan: A radiation-free
scoliosis assessment system using 3D ultrasound imaging,” Scoliosis Spinal Disord.,
vol. 11, no. 1, pp. 1–15, 2016.
[14] M. Chen, B. Huang, and Y. Xu, “Postural kyphosis detection using intelligent
shoes,” Proc. - IEEE Int. Conf. Robot. Autom., pp. 2954–2958, 2008.
[15] B. Samuvel, V. Thomas, M. G. Mini, and J. Renjith Kumar, “A mask based
segmentation algorithm for automatic measurement of Cobb angle from scoliosis x-
ray image,” Proc. - 2012 Int. Conf. Adv. Comput. Commun. ICACC 2012, pp. 110–
113, 2012.
[16] M. Bazzarelli, N. Durdle, E. Lou, and J. Raso, “A low power portable
48
electromagnetic posture monitoring system [for scoliosis treatment],” Cycle, pp.
619–623, 2002.
[17] O. Dehzangi, M. Mohammadi, and Y. Li, “Smart brace for monitoring patients with
scoliosis using a multimodal sensor board solution,” 2016 IEEE Healthc. Innov.
Point-of-Care Technol. Conf. HI-POCT 2016, no. 313, pp. 66–69, 2016.
[18] J. C. Rodriguez, O. Y. Sergiyenko, V. V Tyrsa, L. C. Basaca, and J. I. N. Hipólito,
“Continuous monitoring of rehabilitation in patients with scoliosis using automatic
laser scanning [Monitoreo continuo de rehabilitación en pacientes con escoliosis
utilizando barrido Laser automático],” Pan Am. Heal. Care Exch. PAHCE 2011 -
Conf. Work. Exhib. Coop. / Linkages An Indep. Forum Patient Care Technol.
Support, pp. 410–414, 2011.
[19] D. Archibald, K. Vemula, M. Anburajan, and V. P. R. Siva Kumar, “Portable
biofeedback device for rehabilitating children with scoliosis between ages of 3-10
years and their posture correction,” ICECT 2011 - 2011 3rd Int. Conf. Electron.
Comput. Technol., vol. 3, pp. 234–238, 2011.
[20] E. Chalmers, E. Lou, D. Hill, V. H. Zhao, and M. S. Wong, “Development of a
pressure control system for brace treatment of scoliosis,” IEEE Trans. Neural Syst.
Rehabil. Eng., vol. 20, no. 4, pp. 557–563, 2012.
[21] S. Bansode, T. Shinde, M. Nimmagadda, S. Garapati, and I. Abdel-Qader, “Design
and implementation of regulated-pressure brace with on-board control and
monitoring abilities for the treatment of scoliosis,” Proc. 2017 2nd IEEE Int. Conf.
Electr. Comput. Commun. Technol. ICECCT 2017, pp. 0–4, 2017.
[22] A. D. H. Rouvière, ANATOMÍA HUMANA Descriptiva, topográfica y funcional.,
ELSEVIER. Masson, Paris: Abril 2005, 2013.
[23] J. Díaz, C. Schroter, and R. Schulz, “Actualización de la evaluación radiológica de
la escoliosis,” Rev. Chil. Radiol., vol. 15, no. 3, pp. 141–151, 2009.
[24] J. A. Herring, M. O. Tachdjian, and Texas Scottish Rite Hospital for Children,
Tachdjian’s pediatric orthopaedics : from the Texas Scottish Rite Hospital for
Children. 2015.
[25] C. Concepts, “Sway back posture – a leading poor posture type causing back pain,”
2018. [Online]. Available: https://www.coreconcepts.com.sg/article/sway-back-
posture/.
[26] Back.com, “Scoliosis and spinal curvatures,” 2017. [Online]. Available:
http://www.back.com/back-pain/conditions/scoliosis/index.htm.
[27] The Nemours Foundation, “Cifosis,” 2019. [Online]. Available:
https://kidshealth.org/es/teens/kyphosis-esp.html.
[28] University of Maryland Medical Center (UMMC), “Adult Kyphosis,” 2003.
[Online]. Available: https://www.umms.org/ummc/health-
services/orthopedics/services/spine/patient-guides/adult-kyphosis.
[29] “¿Qué es la lordosis?,” 2019. [Online]. Available:
https://correctordepostura.com/que-es-la-lordosis/.
[30] J. M. A. E. Enriquez, M. Sabaté, “Actitud Diagnóstico-Terapéutica,” BSCP Can
Ped, vol. 25, no. 3, pp. 1–11, 2001.
[31] K. I. Satoto, R. R. Isnanto, R. Kridalukmana, and K. T. Martono, “Optimizing

49
MySQL database system on information systems research, publications and
community service,” Proc. - 2016 3rd Int. Conf. Inf. Technol. Comput. Electr. Eng.
ICITACEE 2016, pp. 1–5, 2017.
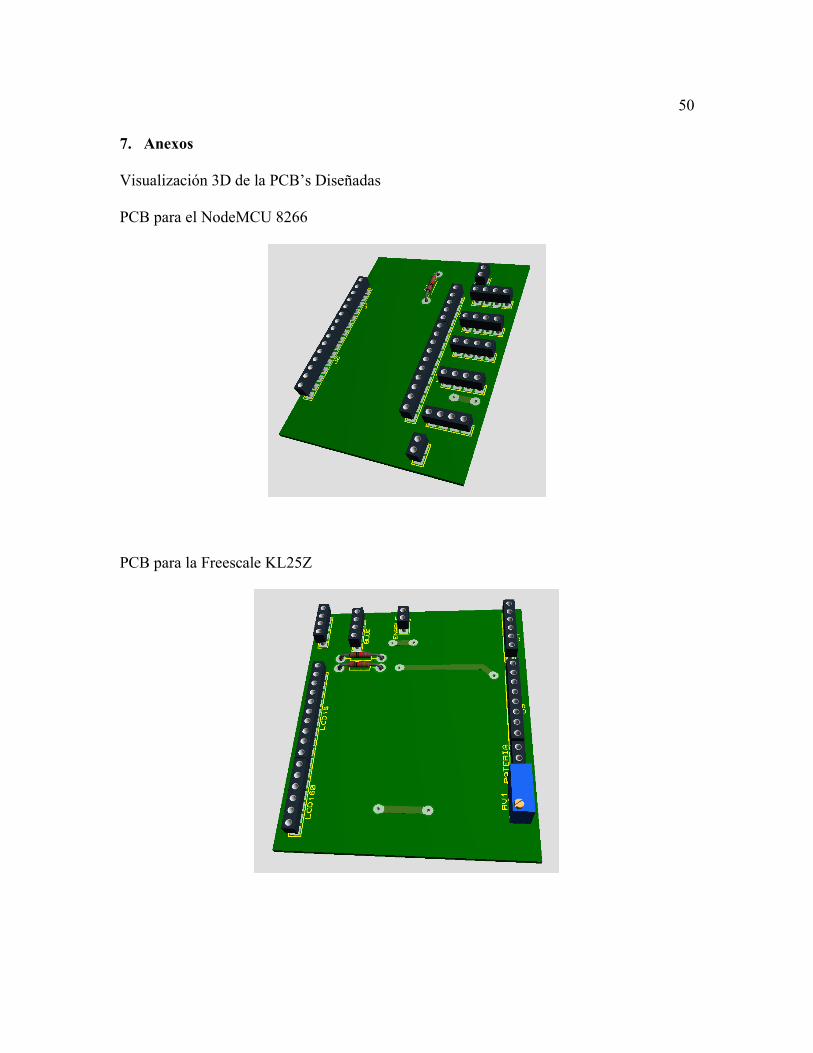
50
7. Anexos
Visualización 3D de la PCB’s Diseñadas
PCB para el NodeMCU 8266
PCB para la Freescale KL25Z
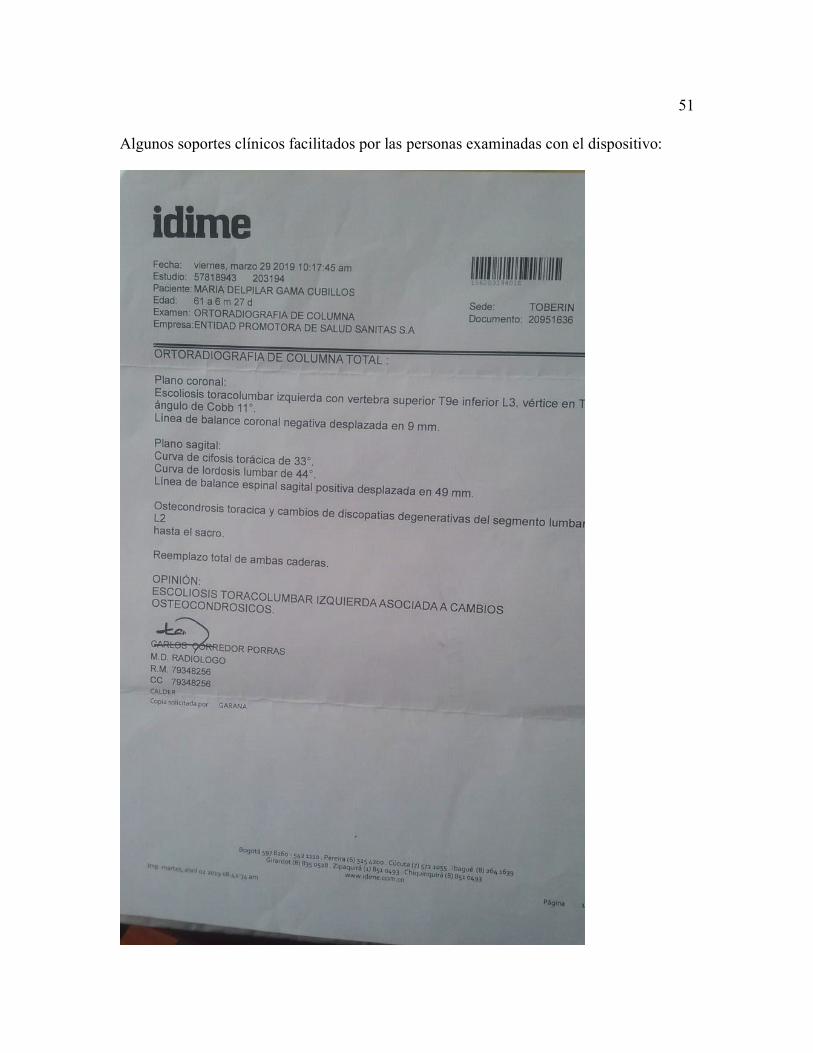
51
Algunos soportes clínicos facilitados por las personas examinadas con el dispositivo:
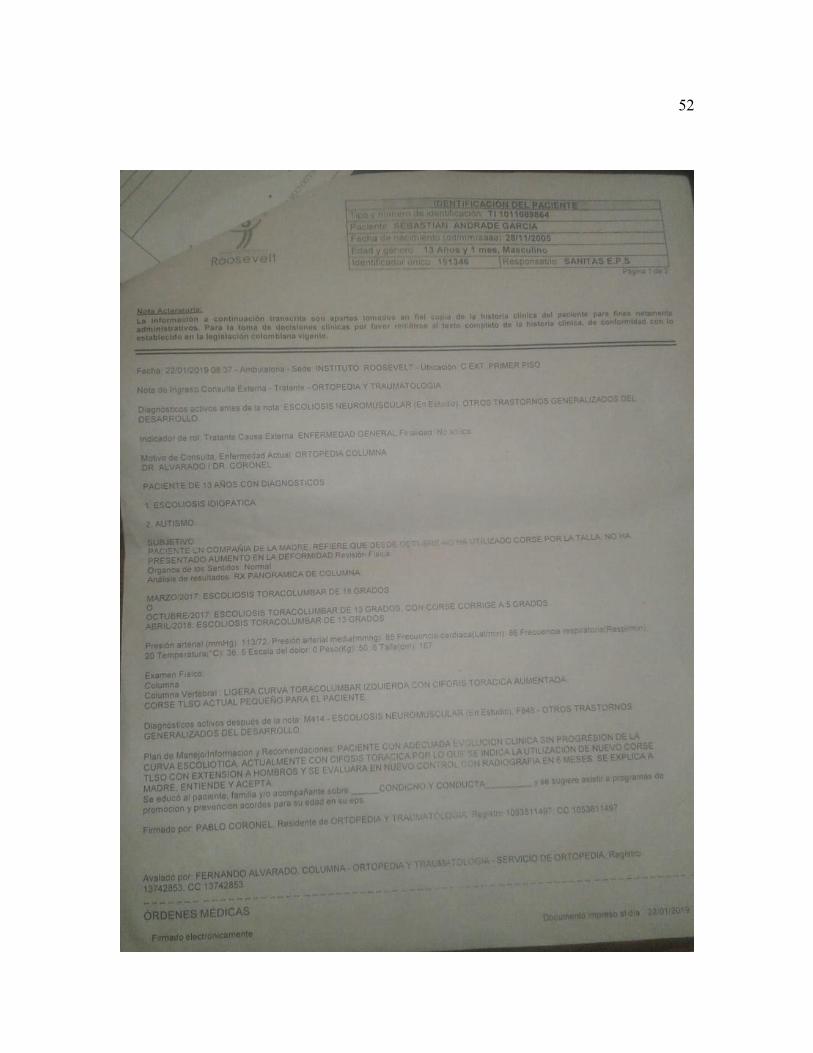
52
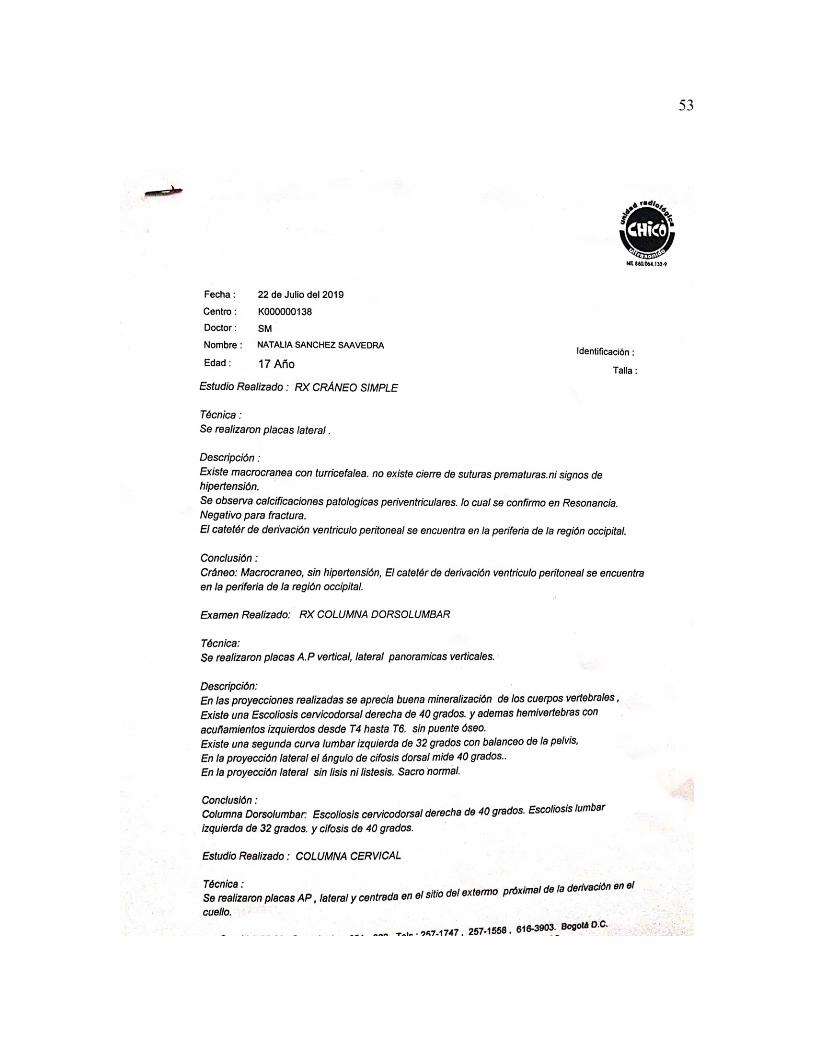
53





























