Embed Size (px)
Citation preview
UNLP-FI- Caminos I – Curvas Horizontales
Página 1 de 15
Curvas Horizontales
Introducción
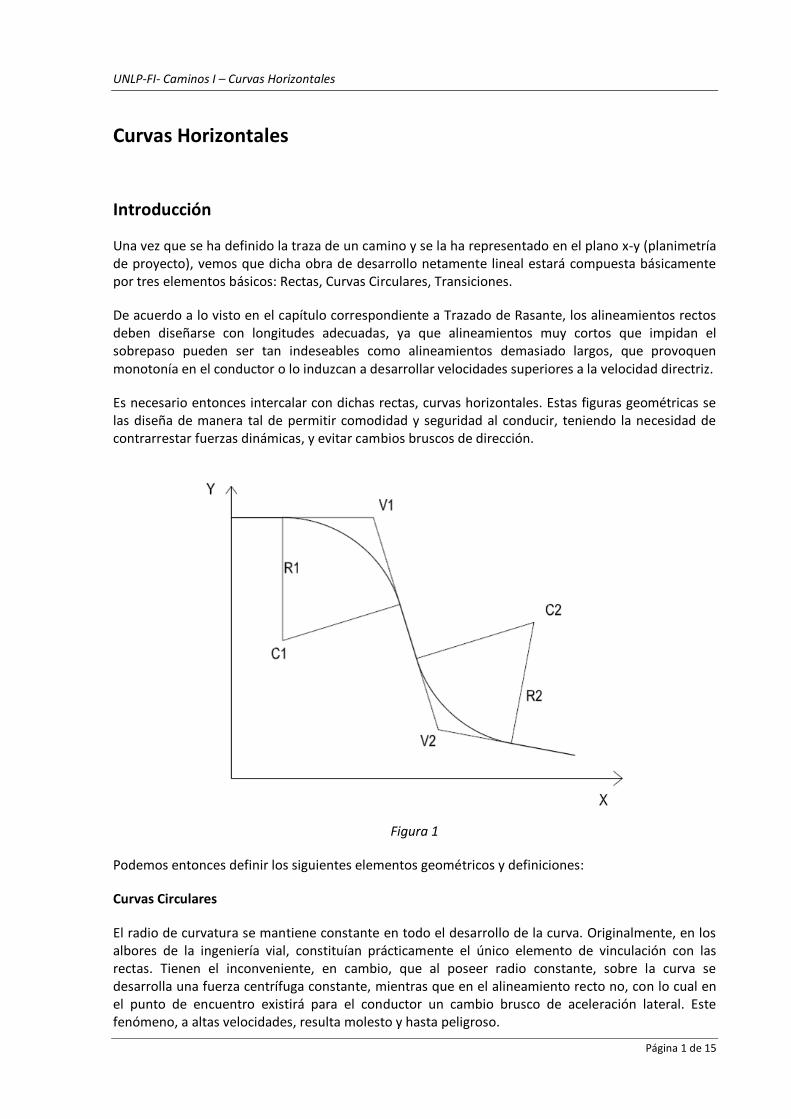
Una vez que se ha definido la traza de un camino y se la ha representado en el plano x-y (planimetría de proyecto), vemos que dicha obra de desarrollo netamente lineal estará compuesta básicamente por tres elementos básicos: Rectas, Curvas Circulares, Transiciones.
De acuerdo a lo visto en el capítulo correspondiente a Trazado de Rasante, los alineamientos rectos deben diseñarse con longitudes adecuadas, ya que alineamientos muy cortos que impidan el sobrepaso pueden ser tan indeseables como alineamientos demasiado largos, que provoquen monotonía en el conductor o lo induzcan a desarrollar velocidades superiores a la velocidad directriz.
Es necesario entonces intercalar con dichas rectas, curvas horizontales. Estas figuras geométricas se las diseña de manera tal de permitir comodidad y seguridad al conducir, teniendo la necesidad de contrarrestar fuerzas dinámicas, y evitar cambios bruscos de dirección.
Figura 1
Podemos entonces definir los siguientes elementos geométricos y definiciones:
Curvas Circulares
El radio de curvatura se mantiene constante en todo el desarrollo de la curva. Originalmente, en los albores de la ingeniería vial, constituían prácticamente el único elemento de vinculación con las rectas. Tienen el inconveniente, en cambio, que al poseer radio constante, sobre la curva se desarrolla una fuerza centrífuga constante, mientras que en el alineamiento recto no, con lo cual en el punto de encuentro existirá para el conductor un cambio brusco de aceleración lateral. Este fenómeno, a altas velocidades, resulta molesto y hasta peligroso.
UNLP-FI- Caminos I – Curvas Horizontales
Página 2 de 15
Transiciones
Pasar de una situación de alineamiento recto (fuerza centrífuga cero), a un alineamiento circular con fuerza centrífuga constante, puede solucionarse con una figura geométrica que varíe su radio y curvatura punto a punto, de manera tal de lograr una variación gradual de las acciones dinámicas. Esto se logra con el diseño de una espiral o curva de Euler.
Velocidad Directriz
Definida como aquella a la cual, un conductor de habilidad media, con razonable atención, puede recorrer el camino con entera seguridad.
Tablas de Barnett
Desde la década del 40 se utilizan en nuestro país tablas confeccionadas originalmente por el Ingeniero Joseph Barnett del Public Road Administration de los EEUU. Dichas tablas permiten diseñar los distintos elementos que componen las curvas horizontales, basándose para esto en distintas consideraciones que se verán a continuación.
Recorrido de una curva - Planteo dinámico
Un vehículo, al recorrer una curva circular, experimenta una fuerza centrífuga:
Donde
Fc: Fuerza Centrífuga
R: Radio (m)
: Velocidad (m/s)
Aceleración de la gravedad (m/s2)
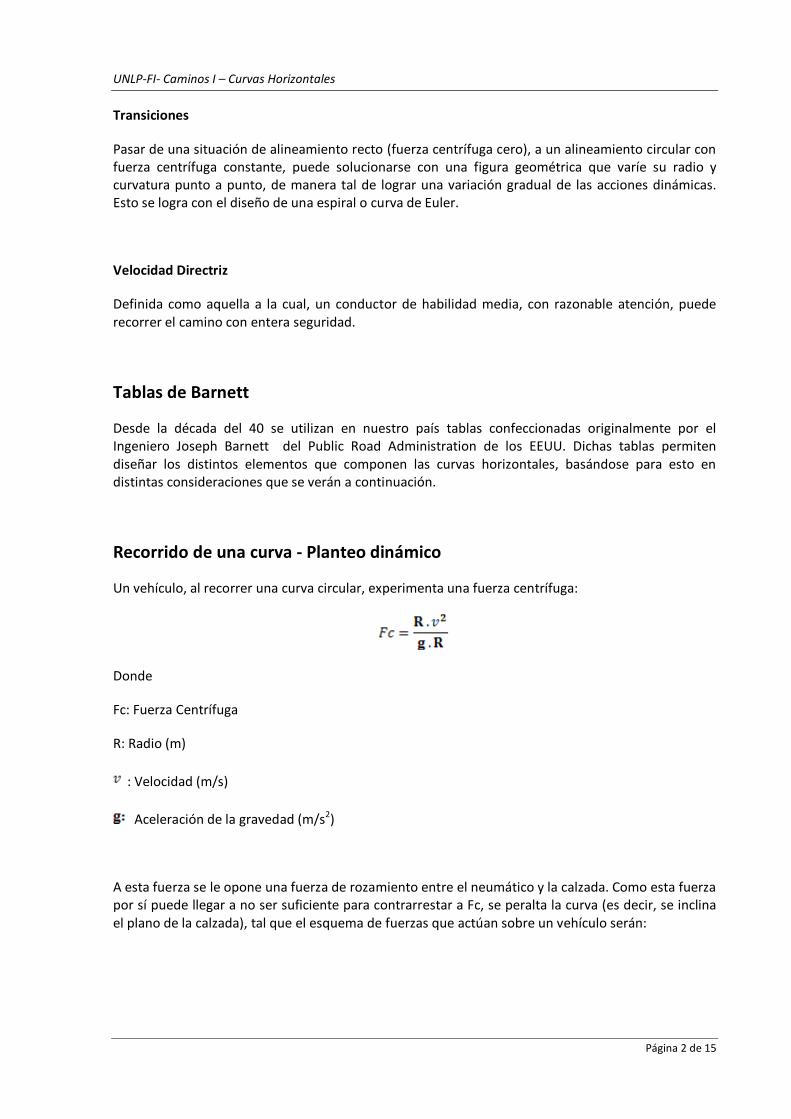
A esta fuerza se le opone una fuerza de rozamiento entre el neumático y la calzada. Como esta fuerza por sí puede llegar a no ser suficiente para contrarrestar a Fc, se peralta la curva (es decir, se inclina el plano de la calzada), tal que el esquema de fuerzas que actúan sobre un vehículo serán:
UNLP-FI- Caminos I – Curvas Horizontales
Página 3 de 15
Fc . cos β = P . sen β + P . f . cos β
Fc = tg β + P . f donde tg β es aproximadamente igual al peralte i
R . g
2P.vf) (i . P =+
R
2 v.007865.0f) (i =+
( )fivR+
=.127
2
Coeficiente de fricción transversal húmeda máxima, (ftmáx)
El coeficiente de fricción transversal depende de una serie de factores: la velocidad del vehículo, el tipo, condición y peralte de la superficie del camino, y el tipo y estado de los neumáticos.
El coeficiente de fricción transversal máximo húmeda, ftmáx, es el desarrollado en condiciones de inminente deslizamiento lateral del vehículo, con un razonable margen de seguridad. La expresión de ftmáx en función de V es:
Para h
km80V ≤ ; 50003V0,188ftmáx −=
Para h
km80V > ; 800V0,24ftmáx −=
UNLP-FI- Caminos I – Curvas Horizontales
Página 4 de 15
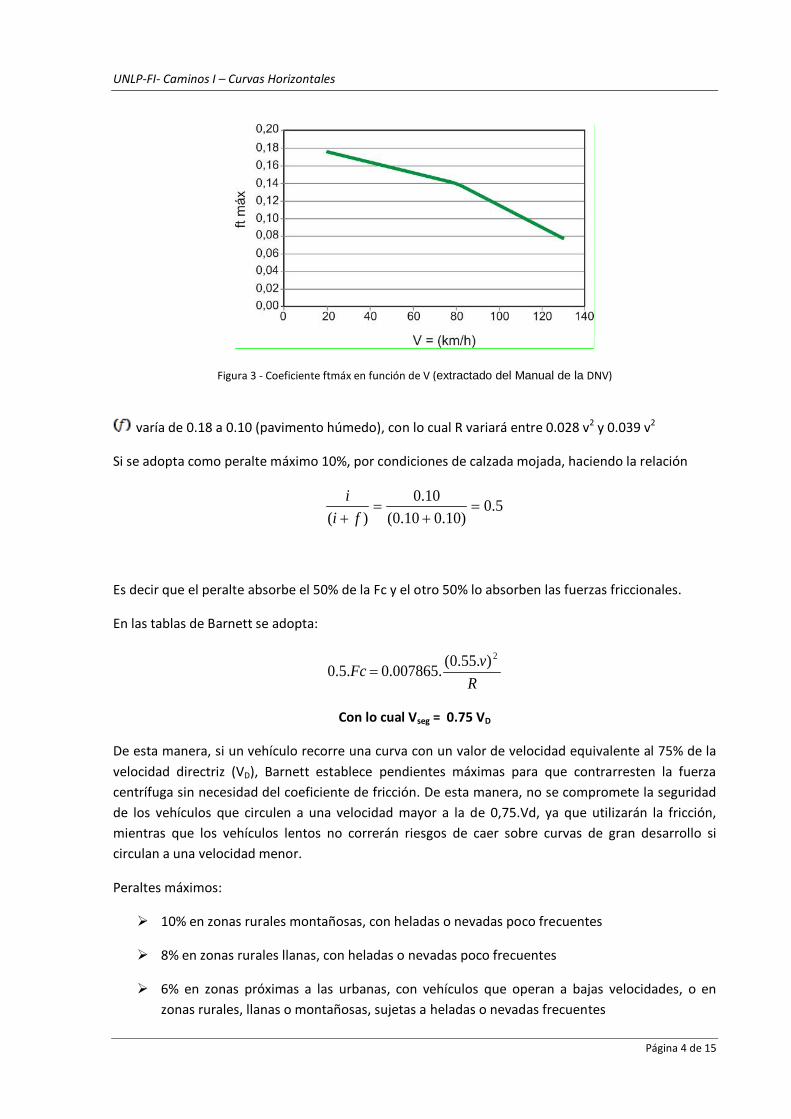
Figura 3 - Coeficiente ftmáx en función de V (extractado del Manual de la DNV)
varía de 0.18 a 0.10 (pavimento húmedo), con lo cual R variará entre 0.028 v2 y 0.039 v2
Si se adopta como peralte máximo 10%, por condiciones de calzada mojada, haciendo la relación
5.0)10.010.0(
10.0)(
=+
=+ fii
Es decir que el peralte absorbe el 50% de la Fc y el otro 50% lo absorben las fuerzas friccionales.
En las tablas de Barnett se adopta:
RvFc
2).55.0(.007865.0.5.0 =
Con lo cual Vseg = 0.75 VD
De esta manera, si un vehículo recorre una curva con un valor de velocidad equivalente al 75% de la velocidad directriz (VD), Barnett establece pendientes máximas para que contrarresten la fuerza centrífuga sin necesidad del coeficiente de fricción. De esta manera, no se compromete la seguridad de los vehículos que circulen a una velocidad mayor a la de 0,75.Vd, ya que utilizarán la fricción, mientras que los vehículos lentos no correrán riesgos de caer sobre curvas de gran desarrollo si circulan a una velocidad menor.
Peraltes máximos:
10% en zonas rurales montañosas, con heladas o nevadas poco frecuentes
8% en zonas rurales llanas, con heladas o nevadas poco frecuentes
6% en zonas próximas a las urbanas, con vehículos que operan a bajas velocidades, o en zonas rurales, llanas o montañosas, sujetas a heladas o nevadas frecuentes
UNLP-FI- Caminos I – Curvas Horizontales
Página 5 de 15
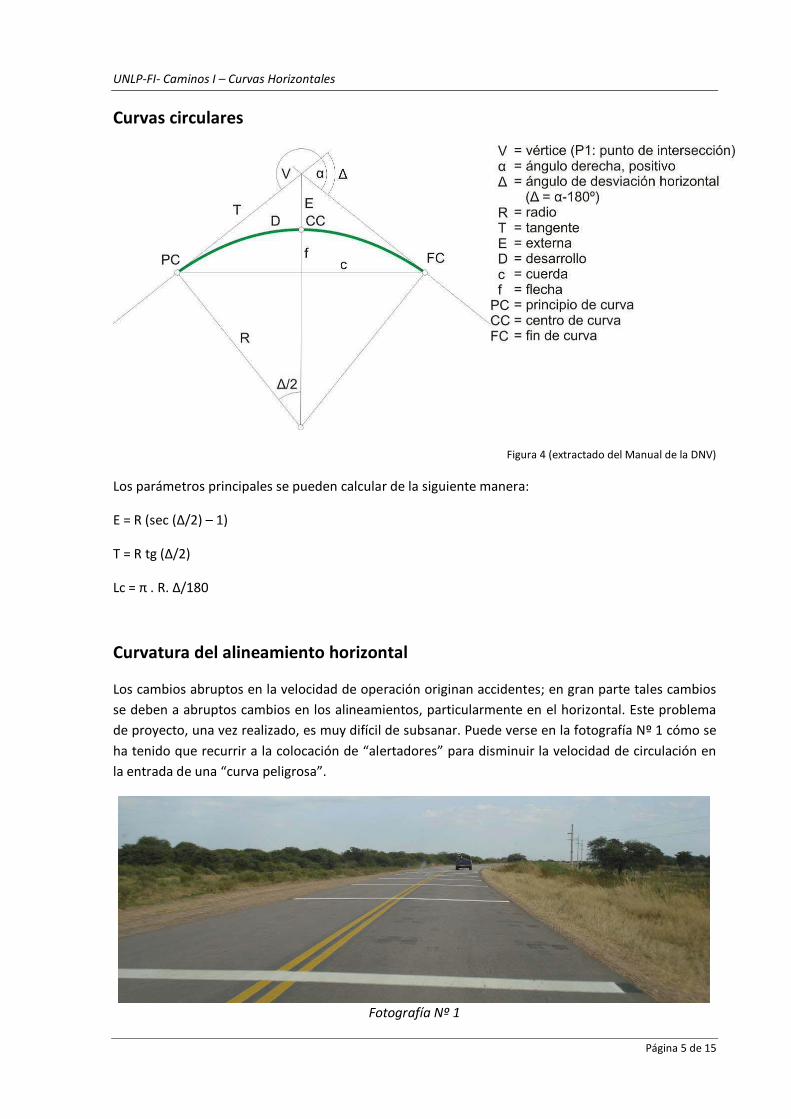
Curvas circulares
Figura 4 (extractado del Manual de la DNV)
Los parámetros principales se pueden calcular de la siguiente manera:
E = R (sec (Δ/2) – 1)
T = R tg (Δ/2)
Lc = π . R. Δ/180
Curvatura del alineamiento horizontal
Los cambios abruptos en la velocidad de operación originan accidentes; en gran parte tales cambios se deben a abruptos cambios en los alineamientos, particularmente en el horizontal. Este problema de proyecto, una vez realizado, es muy difícil de subsanar. Puede verse en la fotografía Nº 1 cómo se ha tenido que recurrir a la colocación de “alertadores” para disminuir la velocidad de circulación en la entrada de una “curva peligrosa”.
Fotografía Nº 1

UNLP-FI- Caminos I – Curvas Horizontales
Página 6 de 15
Curvas circulares con transición
Cuando ocurre un cambio en la curvatura horizontal del camino, pasándose de una conducción en línea recta a curva, el conductor se las ingeniará para evitar el pasaje brusco de uno a otro elemento. Seguramente tratará de variar la velocidad y la trayectoria, parte en la recta y parte en la curva, para que el cambio de las acciones dinámicas sea gradual. Si la variación de velocidad no es suficiente, la variación de trayectoria puede significar la peligrosa invasión del carril contrario, con el “barrido” de la curva para lograr la deseada transición dinámica.
La transición dinámica gradual también puede obtenerse intercalando entre el alineamiento recto y el segmento de curva circular, una curva que tenga un gradual cambio de curvatura a lo largo de su longitud. La espiral es una línea curva, plana y abierta, de radio de curvatura creciente. Es generada por un punto que, según cierta ley de variación, gira alrededor y se aleja de otro llamado polo. Cada vuelta es una espira.
Figura 5 (extractado del Manual de la DNV)
Curvatura media de un arco
La curvatura media de un arco es la razón entre el ángulo de desviación Δ formado por las tangentes extremas al arco (igual al ángulo al centro), y la longitud del arco:
LΔCmC ==
UNLP-FI- Caminos I – Curvas Horizontales
Página 7 de 15
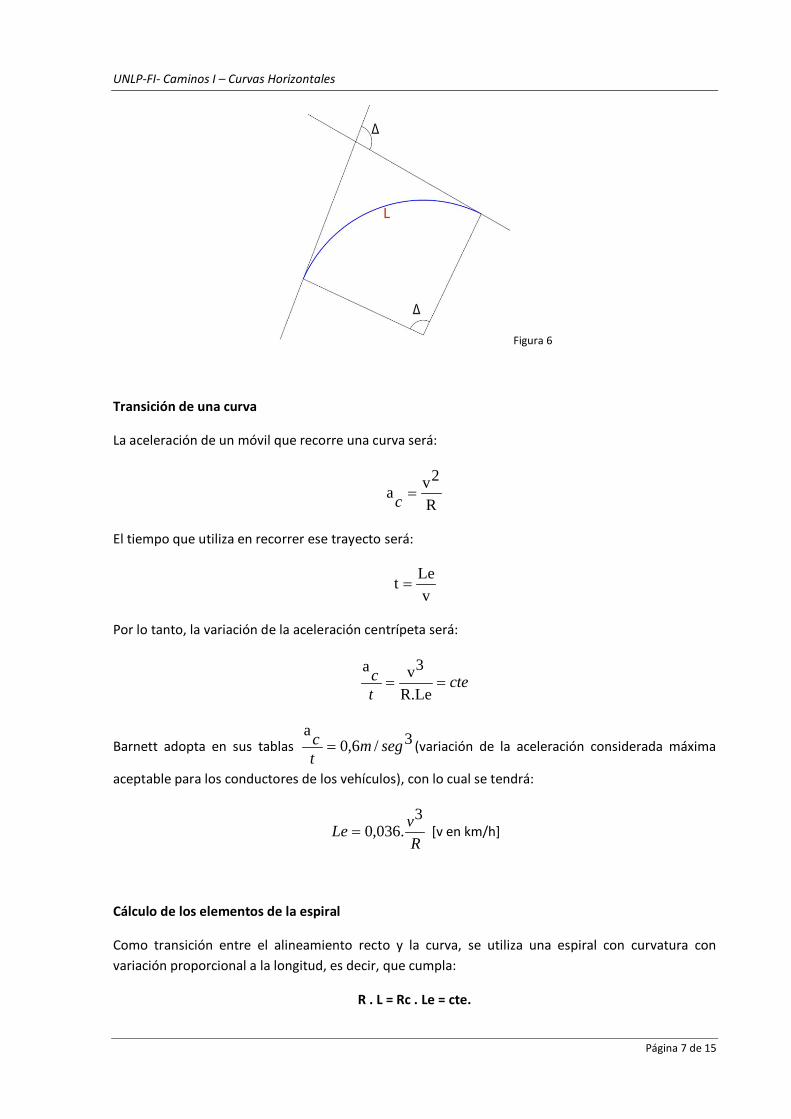
Figura 6
Transición de una curva
La aceleración de un móvil que recorre una curva será:
R
2va =c
El tiempo que utiliza en recorrer ese trayecto será:
vLet =
Por lo tanto, la variación de la aceleración centrípeta será:
ctetc ==
R.Le
3va
Barnett adopta en sus tablas 3/6,0a
segmtc = (variación de la aceleración considerada máxima
aceptable para los conductores de los vehículos), con lo cual se tendrá:
RvLe3
.036,0= [v en km/h]
Cálculo de los elementos de la espiral
Como transición entre el alineamiento recto y la curva, se utiliza una espiral con curvatura con variación proporcional a la longitud, es decir, que cumpla:
R . L = Rc . Le = cte.
UNLP-FI- Caminos I – Curvas Horizontales
Página 8 de 15
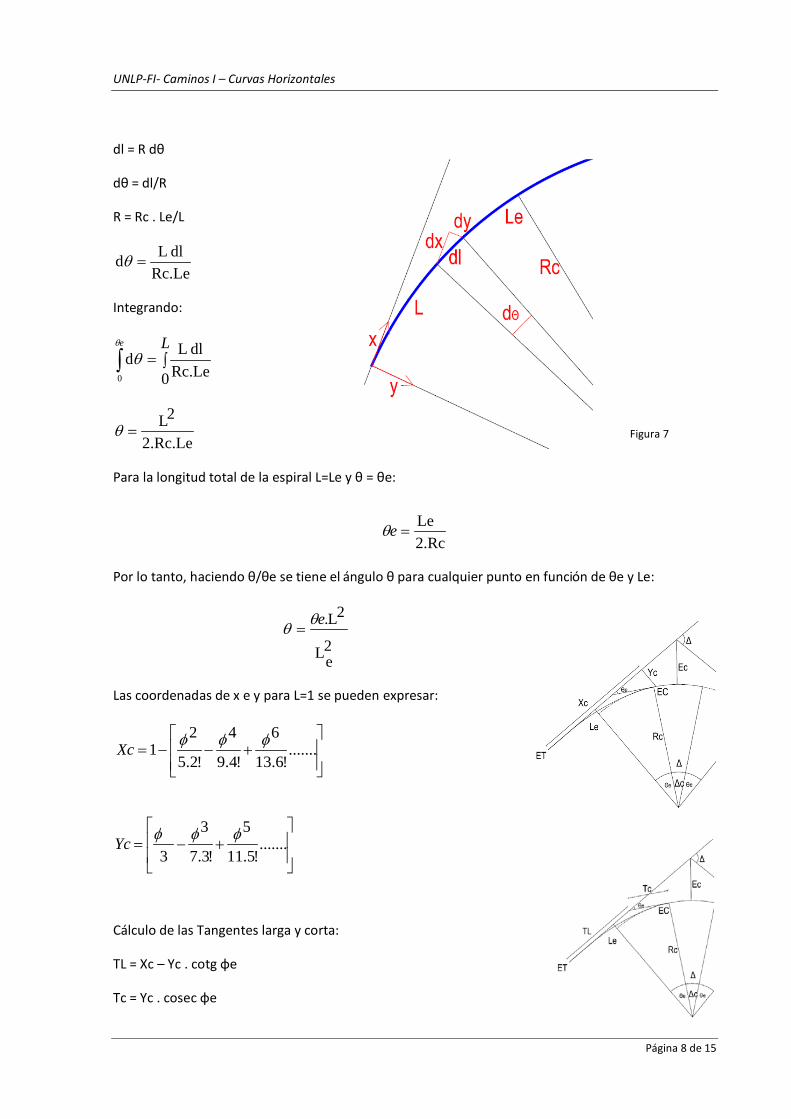
dl = R dθ
dθ = dl/R
R = Rc . Le/L
Rc.Ledl Ld =θ
Integrando:
∫=∫Le
0 Rc.Ledl Ld
0
θ
θ
2.Rc.Le
2L=θ
Para la longitud total de la espiral L=Le y θ = θe:
2.RcLe
=eθ
Por lo tanto, haciendo θ/θe se tiene el ángulo θ para cualquier punto en función de θe y Le:
2eL
2L.eθθ =
Las coordenadas de x e y para L=1 se pueden expresar:
+−= .......
!5.11
5
!3.7
3
3φφφYc
Cálculo de las Tangentes larga y corta:
TL = Xc – Yc . cotg φe
Tc = Yc . cosec φe
+−−= .......
!6.13
6
!4.9
4
!2.5
21 φφφXc
Figura 7

UNLP-FI- Caminos I – Curvas Horizontales
Página 9 de 15
Al aplicar la espiral, para darle espacio entre la recta y la curva circular, ésta tiene que desplazarse hacia su centro. Así, la curva circular se ubica entre rectas tangentes paralelas a las originales, pero retranqueadas en una cantidad p. Con relación al origen de la transición, el centro de la curva circular retranqueada tiene las coordenadas k (abscisa) y R+p (ordenada), según notación de Barnett para la clotoide.
Los valores p y k resultan al sumar los infinitos términos n de las siguientes series fuertemente convergentes:
( ) ( ) ( )∑ ++
−=n
n
n
n
nnRL
02
2
2
!222341
4RLp
( ) ( ) ( )∑ ++
−=n
n
n
n
nnRL
02
2
!122141
2Lk
Siendo L=Le= longitud de la transición. Tomando sólo el primer término de cada serie resultan valores prácticos; para n=0:
24RLp
2
=
2Lk =
Tangente Externa:
k2Δtanp)(RTe +×+=
Cuerda:
22LC YcXc +=
Desarrollo de toda la curva: Le + Lc + Le
Siendo Lc = Rc . Δc
UNLP-FI- Caminos I – Curvas Horizontales
Página 10 de 15
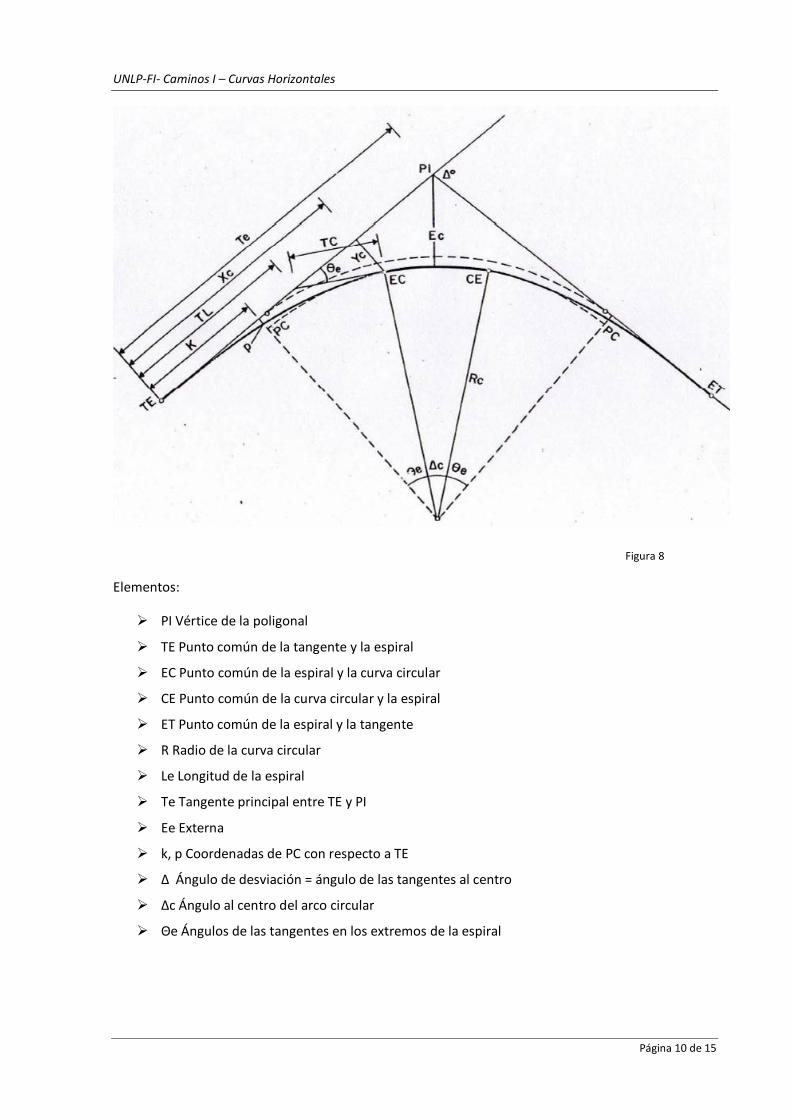
Elementos:
PI Vértice de la poligonal
TE Punto común de la tangente y la espiral
EC Punto común de la espiral y la curva circular
CE Punto común de la curva circular y la espiral
ET Punto común de la espiral y la tangente
R Radio de la curva circular
Le Longitud de la espiral
Te Tangente principal entre TE y PI
Ee Externa
k, p Coordenadas de PC con respecto a TE
Δ Ángulo de desviación = ángulo de las tangentes al centro
Δc Ángulo al centro del arco circular
Θe Ángulos de las tangentes en los extremos de la espiral
Figura 8
UNLP-FI- Caminos I – Curvas Horizontales
Página 11 de 15
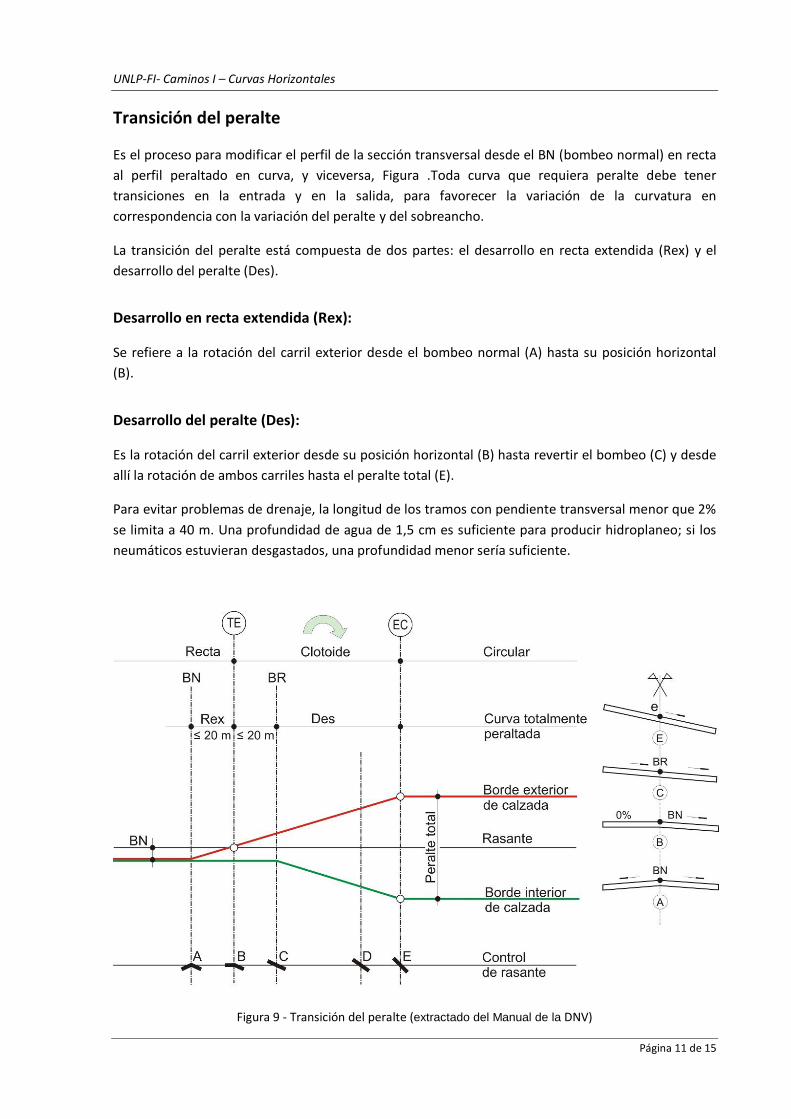
Transición del peralte
Es el proceso para modificar el perfil de la sección transversal desde el BN (bombeo normal) en recta al perfil peraltado en curva, y viceversa, Figura .Toda curva que requiera peralte debe tener transiciones en la entrada y en la salida, para favorecer la variación de la curvatura en correspondencia con la variación del peralte y del sobreancho.
La transición del peralte está compuesta de dos partes: el desarrollo en recta extendida (Rex) y el desarrollo del peralte (Des).
Desarrollo en recta extendida (Rex):
Se refiere a la rotación del carril exterior desde el bombeo normal (A) hasta su posición horizontal (B).
Desarrollo del peralte (Des):
Es la rotación del carril exterior desde su posición horizontal (B) hasta revertir el bombeo (C) y desde allí la rotación de ambos carriles hasta el peralte total (E).
Para evitar problemas de drenaje, la longitud de los tramos con pendiente transversal menor que 2% se limita a 40 m. Una profundidad de agua de 1,5 cm es suficiente para producir hidroplaneo; si los neumáticos estuvieran desgastados, una profundidad menor sería suficiente.
Figura 9 - Transición del peralte (extractado del Manual de la DNV)
UNLP-FI- Caminos I – Curvas Horizontales
Página 12 de 15
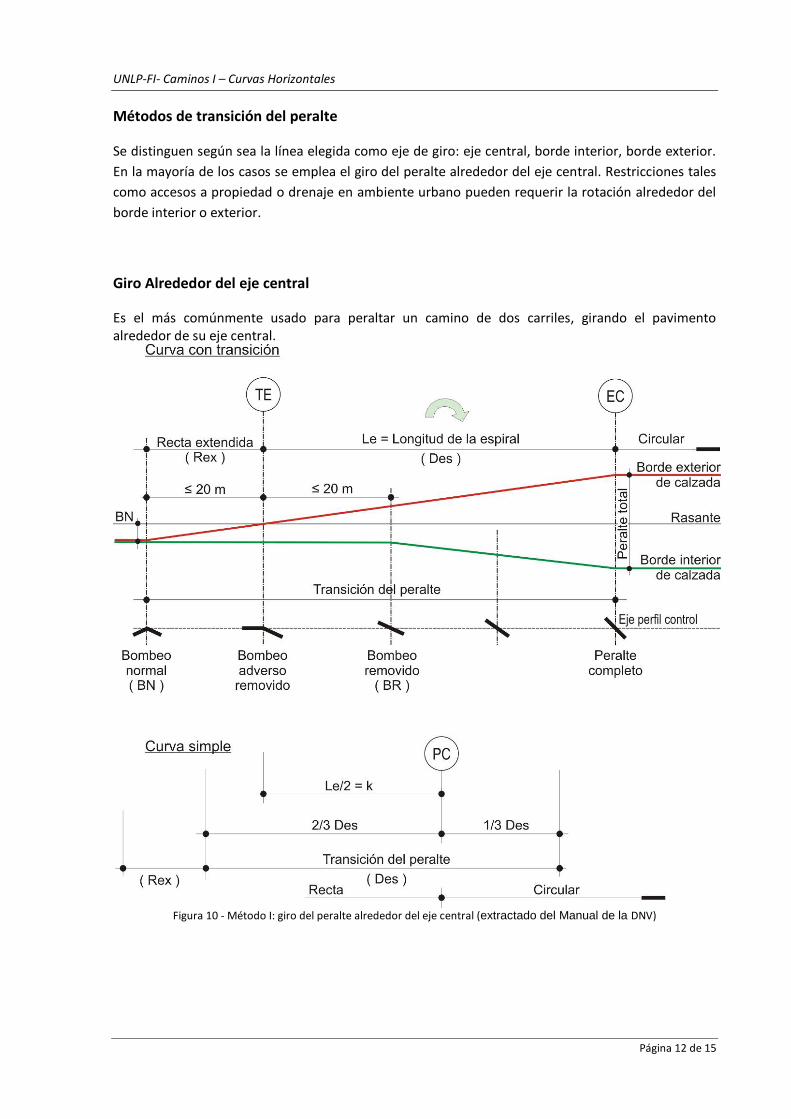
Métodos de transición del peralte
Se distinguen según sea la línea elegida como eje de giro: eje central, borde interior, borde exterior. En la mayoría de los casos se emplea el giro del peralte alrededor del eje central. Restricciones tales como accesos a propiedad o drenaje en ambiente urbano pueden requerir la rotación alrededor del borde interior o exterior.
Giro Alrededor del eje central
Es el más comúnmente usado para peraltar un camino de dos carriles, girando el pavimento alrededor de su eje central.
Figura 10 - Método I: giro del peralte alrededor del eje central (extractado del Manual de la DNV)
UNLP-FI- Caminos I – Curvas Horizontales
Página 13 de 15
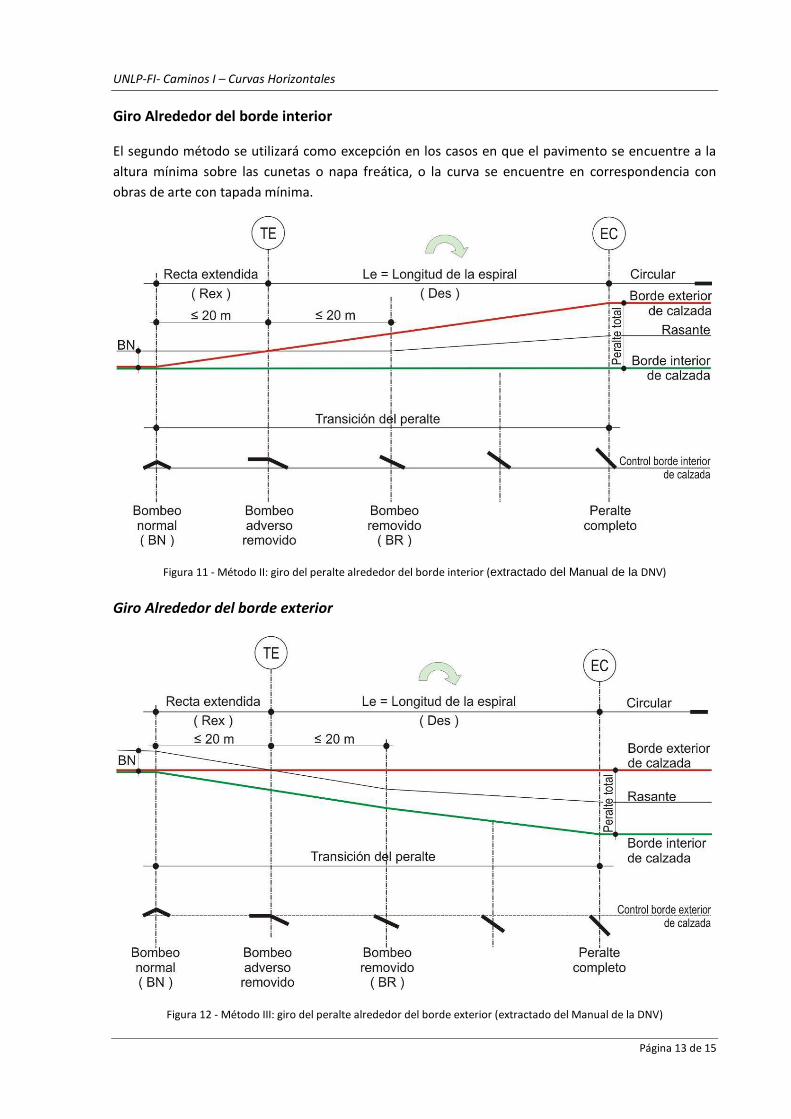
Giro Alrededor del borde interior
El segundo método se utilizará como excepción en los casos en que el pavimento se encuentre a la altura mínima sobre las cunetas o napa freática, o la curva se encuentre en correspondencia con obras de arte con tapada mínima.
Figura 11 - Método II: giro del peralte alrededor del borde interior (extractado del Manual de la DNV)
Giro Alrededor del borde exterior
Figura 12 - Método III: giro del peralte alrededor del borde exterior (extractado del Manual de la DNV)
UNLP-FI- Caminos I – Curvas Horizontales
Página 14 de 15
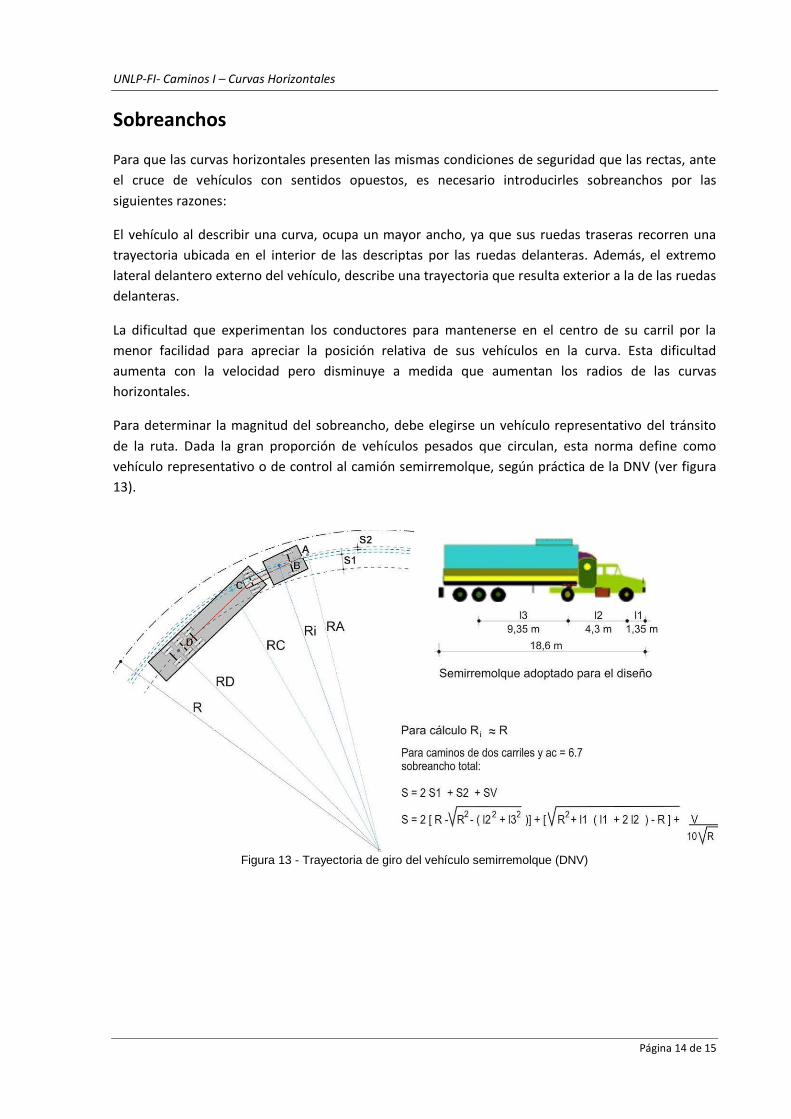
Sobreanchos Para que las curvas horizontales presenten las mismas condiciones de seguridad que las rectas, ante el cruce de vehículos con sentidos opuestos, es necesario introducirles sobreanchos por las siguientes razones:
El vehículo al describir una curva, ocupa un mayor ancho, ya que sus ruedas traseras recorren una trayectoria ubicada en el interior de las descriptas por las ruedas delanteras. Además, el extremo lateral delantero externo del vehículo, describe una trayectoria que resulta exterior a la de las ruedas delanteras.
La dificultad que experimentan los conductores para mantenerse en el centro de su carril por la menor facilidad para apreciar la posición relativa de sus vehículos en la curva. Esta dificultad aumenta con la velocidad pero disminuye a medida que aumentan los radios de las curvas horizontales.
Para determinar la magnitud del sobreancho, debe elegirse un vehículo representativo del tránsito de la ruta. Dada la gran proporción de vehículos pesados que circulan, esta norma define como vehículo representativo o de control al camión semirremolque, según práctica de la DNV (ver figura 13).
Figura 13 - Trayectoria de giro del vehículo semirremolque (DNV)
UNLP-FI- Caminos I – Curvas Horizontales
Página 15 de 15
Bibliografía
1. Apuntes Teórico Prácticos de Curvas Horizontales con y sin Transiciones – Agr. Américo Luis Napolitano.
2. Curvas con Transiciones para Caminos – Joseph Barnett – Dirección de Vialidad Nacional – Año 1941.
3. Normas de Diseño Geométrico de Caminos Rurales – Capítulo 3 - Dirección Nacional de Vialidad – Año 2010.
4. Ingeniería de Carreteras – Paul H. Wright – Edición 1993.











![CUBICACIONES OBRAS09.ppt [Modo de compatibilidad] · -Curvas de Nivel o secciones horizontales.-Cuadrículas o retículas.-Perfiles transversales. CURVAS DE NIVEL O SECCIONES](https://img.pdfslide.es/doc/110x75/5bb4c05309d3f2b63a8b58d0/cubicaciones-modo-de-compatibilidad-curvas-de-nivel-o-secciones-horizontales-cuadriculas.jpg)