Embed Size (px)
Citation preview


El brazo del robot se puede montar sobre una mesa, pedestal o base
lineal. Su velocidad y repetibilidad lo hacen completamente adecuado
tanto para su funcionamiento autónomo como para su integrado en
aplicaciones de células de trabajo automatizadas.

El robot se maneja con el software gráfico en 3D Robocell que permite que los alumnos diseñen, creen y controlen células
industriales simuladas.
Robocell está totalmente integrado con el software de control y programación de robótica SCORBASE y permite simulación
dinámica del robot y las células de trabajo durante la enseñanza de posiciones y ejecución del programa.
El software se ha diseñado para aprovechar toda las ventajas de los 32 bits del sistema operativo Windows.

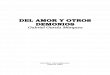
El Scorbot-ER es un robot articulado vertical, similar
a un brazo, con 6 articulaciones (ejes) para
su movimiento, efectuado por motores de cd.
No. Del Eje
Nombre articulación
Movimiento
1 Base Rota el cuerpo
2 Hombre Levanta y baja el ante brazo
3 Codo Levanta y baja el brazo
4 Elevación Levanta y baja la pinza
5 Giro Gira la pinza
6 Pinza Abre y cierra la pinza

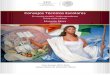
Se lo puede controlar a través de
una interfaz USB.
Software fácil de programar.
Estructura carcasa abierta.
El Controlador-USB es parte del sistema robótico Scorbot que sirve para operar el brazo robot y algunos
accesorios. Se lo conecta a un computador vía conector USB. Posee una fuente de alimentación que
suministra los 24 Vcd para los motores del brazo robot, y dos conexiones adicionales (eje 7 y eje 8) para
los motores de dos accesorios.

Es una posición específica del brazo
del robot en el espacio.
El robot debe hacer home al encender el sistema.
Es un punto de referencia inicial para el robot y
permite una repetición segura de programas y movimientos.

El robot busca su posición home (inicial) mediante los
microinterruptores montados sobre cada una
de las articulaciones y monitorizados por el
controlador.
El microinterruptor está liberado (ON) en ciertas posiciones, y detenido (OFF) en otras ciertas
posiciones.
La rutina home de SCORBASE mueve cada articulación separadamente y chequea el estado de cada
microinterruptor.


El traslado o movimiento de una posición a otra en un robot es realizado a través de
interpolaciones en donde el robot por medio de sus unidades de accionamiento se mueve a la coordenada de la posición comandada.
Otra forma de controlar el robot se basa en controlar la situación, posición y
movimientos de la herramienta que está unida al brazo del robot.
Esto es realizado por dos
funciones existentes en el
software
Ir a la posición: este comando envía al robot a una posición
grabada a lo largo de la trayectoria más corta calculada por el
controlador, normalmente en trayectoria curva. (PTP).
Lineal a la posición: este comando envía al robot a una posición
grabada en línea recta. Se llama movimiento de trayectoria
continua. (CP).

El sistema monitoriza y controla la localización y velocidad de un punto en
particular de la herramienta, conocido
como Punto de la Herramienta (TCP).
La posición del TCP del robot está especificada por un sistema de coordenadas
cartesianas o XYZ. Cada punto/posición tiene un
único y singular conjunto de tres números.
El primer número representa la distancia (en
mílimetros) del TCP a lo largo del eje X.
En el sistema de robótica, el centro de la base del robot
sobre la mesa se define como el origen.
El signo de la coordenada (+ ó -) indica la dirección a lo
largo de cada eje. Las coordenadas del origen son
(0,0,0).
El segundo número representa la distancia del TCP a lo largo del eje Y, y la tercera a lo largo el eje Z.


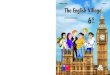
Está compuesta de ocho menús y cada uno contiene comandos RoboCell que se
usan para manejar proyectos.

Está formada por botones que permiten acceder rápidamente a los comandos RoboCell
más usados.

Muestra el programa SCORBASE que se ha
escrito para el proyecto. Toda la programación se
hace en esta ventana. Cada comando del
programa se muestra como una línea
separada en la ventana programa.

Muestra una simulación en 3D del robot y otros
objetos de la célula de trabajo.

Todos los software permiten manipular y
mover el robot, además de otros elementos de
la célula de trabajo.

Nos permite grabar y enseñar posiciones del robot, además de otros
periféricos de la célula.

Permite seleccionar comandos de programación SCORBASE para
usarlos en la ventana programa.


Es un dispositivo que permite ampliar el campo de acción del brazo robot. El brazo
robot va montado sobre este accesorio. Tiene un cable de comunicación con conector DB9
que se conecta al eje 7 de entrada del Controlador USB a fin de manipular los
motores que producen el desplazamiento horizontal del brazo.

Es un accesorio que funciona por medio de un motor de 24 Vcd para desplazar
objetos sobre ella.
El movimiento lo puede realizar en ambas direcciones. Se lo puede
conectar al eje 7 u 8 del Controlador-USB. Cuenta con un sensor óptico para
indicar que un objeto ha llegado a la posición deseada.

Consiste en un disco que gira en ambas direcciones por medio de un motor de 24
Vcd.
Se conecta a una de las entradas de los ejes (eje 7 o eje 8) del Controlador-
USB.

Posee una lámpara y un zumbador que responde a
la salida digital del Controlador-USB.

Este accesorio suministra objetos por acción de la
gravedad.
Tiene un micro-interruptor que indica al Controlador-USB, mediante una de sus entradas digitales, que un objeto está
en posición para ser manipulado.

Es empleado para manipular objetos que la pinza del robot no puede agarrar,
convirtiéndose en una pinza neumática.
Los componentes que conforman el sistema neumático son: compresor,
mangueras para conducir aire, electro válvula 3x2, fuente de energía para
electro válvula, y generador de vacío.
Funcionamiento: El vacío es producido mediante la aplicación del principio de
Venturi, al hacer pasar el aire comprimido por una boquilla cónica, produciendo
aumento de velocidad y caída de presión.
El generador de vacío es sujetado por la pinza del
brazo robot. Los terminales eléctricos de la válvula se
conectan a una de las salidas digitales del Controlador-USB.
La manguera de salida de la válvula se conecta en la parte
posterior inferior de la base del brazo robot. La manguera del
generador de vacío va conectado a la salida de aire del brazo robot
que está unido al motor 6 que abre y cierra la pinza.
CONEXIONES